1 Magnetische Erscheinungen auf der Sonne - Kiepenheuer
Werbung

Vorlesung, Uni Freiburg, SS2003, Magnetohydrodynamik“
”
Rolf Schlichenmaier, Michael Stix: Kiepenheuer-Institut für Sonnenphysik
Juli 2003
1
Magnetische Erscheinungen auf der Sonne
Powerpoint-Präsentation.
1
2
3
4
5
2
Magnetohydrodynamik: Grundgleichungen
2.1
2.1.1
Vorbemerkungen
Bewegung einzelner Teilchen
~ und E-Feld.
~
Bewegung einzelner geladener Teilchen im B
−→ Mikroskopische Beschreibung.
Bewegungsgleichung:
m
d~v
~ + qE
~
= q(~v × B)
dt
~ × B-Drift,
~
~ × ∇|B|-Drift,
~
Stichworte: Lorenzkraft; Gyrationsbewegung, E
B
magnetische Flasche
Einheiten: [B]=1T=1Vs/m2; [E]=V/m [Energie]=1J=1VAs=1Nm; [Ladung]=1As; [Kraft]=1N=1kg m/s2 ;
2.1.2
Bewegung vieler Teilchen
~ und E-Feld.
~
Bewegung vieler Teilchen im B
Teilchen generieren selbst Felder. Keine Probeteilchen. Makroskopische Beschreibung durch elektrisch leitende Flüssigkeit, indem die Gleichungen der Gasdynamik (Hydrodynamik) mit den Maxwell-Gleichungen verknüpft werden.
−→ Magnetohydrodynamik!
2.1.3
MHD gemittelter Felder
Beschreibung von Skalen, die groß sind gegenüber der typischen Länge über die sich die Geschwindigkeit ändert.
−→ Theorie gemittelter Felder. Stichworte: Turbulenz, Dynamotheorie und turbulente Diffusion.
2.2
Magnetohydrodynamische Näherungen der Maxwell-Gleichungen
Annahmen:
1. Es werden nur Strömungsgeschwindigkeiteten betrachtet,
Diese Annahmen wirken sich aus auf:
die klein gegenüber der Lichtgeschwindigkeit sind:
• Verschiebungsstrom in MaxwellGleichungen (vernachlässigbar),
v≪c.
2. Wenn L und τ charakteristische Längen und Zeiten sind, so
dass |∂A/∂x| ≈ A/L und |∂A/∂t| ≈ A/τ , dann soll gelten:
vphase
L
= ≪c.
τ
6
• die Form des Ohmschen Gesetzes,
• die elektromagnetische Kraftdichte.
Maxwell-Gleichungen der MHD (SI-Einheiten):
~ ·B
~
∇
~ ×E
~
∇
~ ·E
~
∇
=
0
=
~˙
−B
=
1~
~
∇×B
µ
ϑ/ǫ
~˙
(+ǫE)
= ~j
ϑ: Raumladungsdichte;
ǫ = ǫ0 = 8.854 × 10−12 As/Vm;
µ = µ0 = 4π × 10−7 Vs/Am; ǫµ = c−2 ;
(1)
Abschätzungen: Längenskala L und Zeitskala τ .
(2)
~ ×E
~ = −B
~˙ folgt: E/B = L/τ .
Aus ∇
(3)Verschiebungsstrom in ∇
~ × B:
~
(4)
E/τ
ǫE/τ
= ǫµ
=
B/µL
B/L
L/τ
c
2
= (vphase /c)2 ≪ 1
⇒ Verschiebungsstrom in MHD vernachlässigbar.
2.3
Masse- und Impulsbilanz, sowie Ohmsches Gesetz
Herleitungen:
1. Heuristische Herleitung als leitende Flüssigkeit: Erweiterung der Hydrodynamik.
2. Herleitung aus Zweiflüssigkeitsmodell für kleine Geschwindigkeiten.
3. Herleitung aus Zweiflüssigkeitsmodell mit schleichender Diffussion
Energie- und Zustandsgleichung: später.
2.3.1
Heuristische Herleitung
Kontinuitätsgleichung (Massenbilanz) Betrachte ein festes Volumen V , das mit Materie der Diche ρ
gefüllt ist, welche mit der Geschwindigkeit ~v strömt. Massenerhaltung fordert, dass die Änderung der Masse in
dem Volumen durch den Massenfluss durch die Volumenoberfläche bestimmt ist:
dM
d
=
dt
dt
⇒
Z
V
ρdV = −
Z V
!
Z
∂V
ρ~v · df~ = (Gaußscher Satz) = −
∂ρ ~
+ ∇ · (ρ~v ) dV = 0 ⇒
∂t
Z
V
~ · (ρ~v )dV
∇
∂ρ ~
+ ∇ · (ρ~v ) = 0
∂t
(5)
Kontinuitätsgleichung
Da das Volumenintegral für jedes beliebige Volumen gelten muss, gilt es auch für ein beliebig kleines. Daraus
folgt die Kontinuitätsgleichung.
In der substantiellen Schreibweise lautet die Kontinuitätsgleichung:
dρ
~ · ~v
= −ρ∇
dt
Substantielle Ableitung: Sei f eine beliebige Variable
(Skalar oder Vektor). Dann beschreibt ∂f /∂t die zeitliche
Änderung für festen Ort ~x, und df /dt die zeitliche Änderung für festes Pakete (man spricht von konvektiver oder
substantieller Ableitung).
∂f
∂f dx ∂f dy ∂f dz
∂f
df
~
=
+
+
+
=
+ (~v · ∇)f
dt
∂t
∂x dt
∂y dt
∂z dt
∂t
7
Bewegungsgleichung (Impulsbilanz) :
Auf ein einzelnes Teilchen wirkt die Kraft
Die hydrodynamische Bewegungsgleichung wird um die Kraftdichte kL
~ erweitert; in
der Lorentzkraft ~j × B
Anlehnung an den Befund, dass die
Kraft/Fläche auf einen Leiter durch I ·
B gegeben ist, und sowohl senkrecht
zum Leiter als auch senkrecht zum B~ = Kraft/Volumen.
Feld wirkt; ~j × B
~ + q~v × B.
~
qE
Die Kraftdichte kL der Lorentzkraft auf ein Gas erhält man durch
q → ϑ (ϑ: Ladungsdichte) und q~v → j (j: Stromdichte). Also:
~ + ~j × B
~ .
kL = ϑE
In der magnetohydrodynamischen Näherung ist der erste Term
der rechten Seite vernachlässigbar.
~ durch eventuelles E-Feld
~
Kraft, ϑE,
vernachlässigbar (, weil E ≪ B, siehe
rechts).
d~v
~ + ρ~g + ~j × B
~
ρ
= −∇p
dt
[|j| ≈ B/µL;
|ϑ| ≈ ǫE/L; also:
ǫE 2 /L
1 E2
|ϑE|
≈ 2
≈ 2 2 ≪1
|j × B|
B /µL
c B
(ρν△~v ): Kraftdichte der Reibung;
ν: Viskosität;
~ ∇
~ · ~v ) − ∇
~ × (∇
~ × ~v )
△~v = ∇(
(+ρν△~v ) (6)
Ohmsches Gesetz Im mitbewegten Koordinatensystem K ′ gilt:
σ [A/Vm]: elektrische Leitfähigkeit (Materialkonstante)
~j [A/m2 ]: Elektrische Stromdichte.
~′
j~′ = σ E
σ ist eine Materialkonstante und darf nicht vom Bezugssystem abhängen.
Galilei-Transformation von mitbewegtem System K ′ in das ruhende Stystem K, mit einer nicht-relativistischen
Relativgeschwindigkeit ~v :
Spezialfall der Lorentz-Transformation: γ = (1 − v 2 /c2 )−1/2
~
E
~v · E
~ + ~v × B)
~
~ ′ = (1 − γ) 2 ~v + γ(E
v
~
~
~ ′ = (1 − γ) ~v · B
~ − ~v × E
B
v + γ(B
2 ~
2 )
v
c
~ + ~v × B)
~
⇒ ~j = σ(E
2.3.2
Galilei-Transformation:
γ→1
=⇒
~′ = E
~ + ~v × B
~
E
~′ = B
~ ⇒ ~j = ~j ′
B
Ohmsches Gesetz in der magnetohydrodynamischen Näherung.
Zweiflüssigkeitsmodell für kleine Geschwindigkeiten
Vorbemerkung: Gas = Elektronen + Ionen +
Ionen: ni , mi , vi , qi .
Kontinuität:
Bewegung:
Neutralteilchen
{z
}
|
hier vernachlässigt
∂ni
~ i v~i
= −∇n
∂t
∂~vi
~ i + ni mi~g + ni qi (E
~ + ~vi × B)
~ − β(~vi − ~ve )
~
n i mi
+ ~vi · ∇~vi = −∇p
∂t
8
(7)
Analoges für Elektronen: ne , me , ve , qe .
∂ne
~ e v~e
= −∇n
∂t
∂~ve
~ e + ne me~g + ne qe (E
~ + ~ve × B)
~ − β(~ve − ~vi )
~ ve = −∇p
n e me
+ ~ve · ∇~
∂t
Kontinuität:
Bewegung:
β-Term: Dieser beschreibt Wechselwirkung zwischen Ionen und Elektronen. Wenn Elektronen und Ionen
verschiedene Geschwindigkeiten besitzen, dann wird zwischen ihnen Impuls ausgetauscht. Sie reiben sich
aneinander. Mikroskopisch gesehen kommt die Wechselwirkung durch die Coulombfelder. Einfache Annahme:
Die Kraft ist proportional zur Relativgeschwindigkeit, ke = −ki = β(~vi − ~ve ).
Gesucht: Gleichungen für Gesamtmassendichte ρ, Gesamtmassenstrom ρ~v , die (Netto-) Stromdichte ~j.
ρ = n i mi + n e me ;
~v =
ni mi~vi + ne me~ve
;
ρ
p = pi + pe ;
~j = ni qi~vi + ne qe~ve
ϑ = ni qi + ne qe ;
Addition der beiden Kontinuitätsgleichungen, multipliziert mit mi bzw. me , gibt sofort:
∂ρ
~ · ρ~v .
= −∇
∂t
~ vi
Die Gleichungen für ~v und ~j erhält man ohne Schwierigkeiten unter der Annahme , dass die Terme ~vi ∇~
~
und ~ve ∇~ve vernachlässigt werden dürfen [z.B. Spitzer, der auf Schlüter 1950 und Lüst 1959 bezüglich einer
vollständigeren Ableitung verweist.] Die Annahme ’kleine ~v ’ ist hinreichend; für statische Gleichungen oder
Stabilitätsfragen auch gut genug.
~ · ρ~v ∝ v 2 , d.h.
v∇
Addition der beiden Bewegungsgleichungen ergibt, da v ∂ρ
∂t ∼ ~
ρ
∂ρ~
v
∂t
v
= ρ ∂~
∂t :
∂~v
~ + ρ~g + ϑE
~ + ~j × B
~ .
= −∇p
∂t
~ gegenüber ~j × B
~ vernachlässigt werden, wenn vphase ≪ c.
Wie oben gezeigt kann ϑE
Substraktion: me · Ionengleichung – mi · Elektronengleichung.
Außerdem sei: qe = −e und qi = Ze (oBdA.: Z=1, einfach geladene Ionen) und das Gas sei quasineutral, d.h.
ni = ne = n.
Dann: ~j = ne(~vi − ~ve ) . Damit:
mi me n
∂
~ e + ne(mi + me )E
~ + ne(me~vi + mi~ve ) × B
~ − β(mi + me )(~vi − ~ve )
~ i + mi ∇p
(~vi − ~ve ) = −me ∇p
∂t
linke Seite: (wegen
mi me ∂
mi me ∂~j
∂n
∼ v , 2.Ordnung in v)
[ne(~vi − ~ve )] =
∂t
e ∂t
e ∂t
auf der rechten Seite: Benutze mi ≫ me und pi = nkTi = nkTe = pe , also:
mi me ∂~j
e ∂t
~
~ + en[mi~vi + me~ve + mi (~ve − ~vi ) + me (~vi − ~ve )] × B
~ − βmi j
~ e + nemi E
= mi ∇p
en
βm
i
~
~
~
~
~j .
= mi ∇pe + nemi E + ρ~v × B − mi~j × B −
en
oder (teilen durch enmi ≈ eρ):
9
2.DS
~
me ∂~j
~ e− j
~ + ~v × B
~ − 1 ~j × B
~ + 1 ∇p
=E
2
e n ∂t
ne
ne
σ
mit, σ := e2 n2 /β.
~ + ~v × B
~ + Hall-Term + Druckdiffusionsterm - ~j/σ.]
[Strombeschleunigungterm = E
Während in der Bewegungsgleichung der Advektionsterm nicht auftaucht (wegen der Annahme der kleinen
Geschwindigkeiten), tauchen im Ohmschen Gesetz Terme auf, die in der heuristischen Herleitung nicht enthalten
sind.
2.3.3
Zweiflüssigkeitsmodell mit schleichender Diffusion
Literatur: Schlüter (1950) Z. Naturforschung 5a, 72 (KIS-Schachtelsammlung).
Schlüter (1959) Plasmaphysik-Vorlesung.
Kippenhahn & Möllenhoff (1975), BI, p.208f.
Die Voraussetzung sei nun |d~vi /dt−d~ve /dt| ≪ |d~vi /dt|, d.h. der Impulsaustausch zwischen Ionen und Elektronen
sei so groß, dass beide Komponenten dieselbe Beschleunigung d~vi /dt ≈ d~ve /dt ≈ d~v /dt erfahren. Dieser Fall
gilt auch für große v, schließt aber 2.3.2 nicht generell ein. Der Term ∂~j/∂t wird jetzt nicht herauskommen, da
er auf Beschleunigung von Elektronen relativ zu den Ionen beruht (Einschalten eines Feldes und damit in Gang
setzen eines Stromes!).
Herleitung der rechten Seiten wie in 2.3.2.
linke Seite der Bewegungsleichung:
n i mi
d~ve
d~v
d~vi
+ n e me
=ρ
,
dt
dt
dt
d.h. unter den veränderten (nicht unbedingt schwächeren Voraussetzungen) erhält man (sogar) die nichtlineare
Form der MHD-Bewegungsgleichung (wie bei der heuristischen Herleitung in 2.3.1).
linke Seite des Ohmschen Gesetzes:
mi me n
d~vi
d~ve
−
dt
dt
=0,
D.h. Ohmsches Gesetz wie in 2.3.2 ohne linke Seite, also ohne Strombeschleunigungsterm.
2.4
2.4.1
Bemerkungen
Der Drucktensor
Ohne die in 2.3.2 und 2.3.3 gemachten Annahmen ist eine Herleitung der MHD-Gleichungen offenbar nicht
möglich. Man kann jedoch allgemein immer die beiden Impulsbilanzen addieren, den Term ρd~v /dt isolieren,
und den ganzen Rest in eine Drucktensor packen, welcher dann richtig den Imulsaustausch zwischen Ionen und
Elektronen beschreibt.
siehe z.B.: Krall & Travelpiece, 1973, p. 90, “Principles of Plasma Physics”.
Ferraro & Plumpton, 1966, p. 182ff, 216, “An Intro to Magneto-Fluid Mecanics”, 2nd edition.
10
2.4.2
~
Die Kraftdichte ~j × B
~ die in 2.3.1 empirisch eingeführt wurde, ist in 2.3.2 und 2.3.3 aus den Kräften auf die
Die Kraftdichte ~j × B,
geladenen Teilchen begründet. Anschauliche Bedeutung dieses Kraftdichte:
~ = 1 (∇
~ 2 /2 = 1 (B
~ × B)
~ ×B
~ = 1 (B
~ · ∇)
~ B
~ − 1 ∇B
~ · ∇)
~ B
~ −∇
~ pm
~j × B
|{z}
µ
µ
µ
µ
|
{z
}
=B 2 /2µ
Spannung
1 ~ ~ ~
µ (B · ∇)B:
magnetische Spannung. (Wie sieht man, dass dies eine Spannung ist?) Magnetische Feldlinien haben
das Bestreben, sich zu verkürzen. Dieser Effekt stellt eine Rückstellkraft zur Verfügung, so dass Magnefeldlinien
wie eine Saite schwingt (Alfvén-Wellen).
pm = B 2 /2µ: magnetischer Druck. Plasma mit hoher Magnetfeldstärke drückt in Richtung von Plasma mit
geringerer Magnetfeldstärke. Das Plasma hat das Bestreben, einen Ausgleich der Magnetfeldsträrke zu erreichen.
Eine magnetische Flussröhre, die in ein magnetfeldfreies Plasma eingebettet ist, übt einen lateralen Druck aus.
Daher muss im Gleichgewicht der Gasdruck innerhalb der Röhre kleiner sein als außerhalb!
Maxwell-Spannungen: Mik = 1/µ(δik B 2 /2 − Bi Bk ). Die i-te Komponente der Kraftdichte: −∂Mik /∂xk .
Beispiel: Sonnenfleck ist kühler als Umgebung und hat deshalb einen geringeren Gasdruck als die Umgebung.
Der magnetische Druck, den das Magnetfeld im Fleck erzeugt, ermöglicht horizontales Druckgleichgewicht,
pint + pm = pext .
Plasma–β: βP = p/pm = 2µp/B 2 . βP ≫ 1: Gasdruck-dominiert; βP ≪ 1: magnetisch dominiert;
2.4.3
Die neuen Terme im Ohmschen Gesetz
Anschauliche Bedeutung von β: Durch die Beschreibung der Wechselwirkung zwischen Ionen und Elektronengas erhält die elektrische Leitfähigkeit eine anschauliche Bedeutung. Bei ruhenden Ionen (~vi = 0) und
ohne sonstige Wechselwirkung wäre wegen der Stöße (für ein Teilchen):
me
β
β
1 dve
d~ve
= − ~ve , d.h.
≈
dt
n
me n
ve dt
ist das Inverse der Zeit, τs , in welcher sich ~ve wegen der Stöße ändert (1/vdv/dt = 1/τs → v = exp v/τs , oder
rechte Seite ≈ △v/v · 1/τs ≈ 1/τs , wenn τs so dass △v/v ≈ 1). Wenn das bei jedem Stoß der Fall ist, ist dies
also Stoß-Frequenz νs (= 1/τs ). Also
β = nme νs
und σ =
e2 n
e 2 n2
.
=
β
m e νs
Dies bedeutet, dass man mit dem Zweikomponentenmodell die Materialkonstante σ durch Größen wie die Teilchendichte n und die Stoßfrequenz νs verstehen kann. (Je seltener gestoßen wird umso höher ist die Leitfähigkeit.)
Wenn das Gas vollständig ionisiert ist, und die Elektronen eine Maxwellsche Geschwindigkeitsverteilung haben,
gilt die “Spitzer”-Formel (Stix Eq. 8.1):
√
32ǫ20 π(2kT )3/2
σ= √
γe
me e2 Z ln Λ
(Z: Ladungszahl der Ionen; Λ = rD /p0 ; rD : Debey-Radius; p0 : Impakt-Faktor; γe : Korrekturfaktor aufgrund
von Stößen zwischen Elektronen.)
11
Strombeschleunigungsterm:
me
e2 n |∂j/∂t|
|j/σ|
≈
1
1
≪ 1, solange τ ≫
νs τ
νs
τ : charakteristische Zeit in der sich der Strom (aufgrund von Plasmabewegungen) ändert. Wenn die mittlere
Stoßzeit klein genug ist, kann der Strombeschleunigungsterm vernachlässigt werden. (Für Plasma, das sich
in LTE befindet, ist der Strombeschleunigungsterm im Ohmschen Gesetz grundsätzlich vernachlässigbar, im
Sonnenwind muss das nicht sein.)
Hall-Term:
ωG
eB
Be
|j × B|/ne
=
≪ 1, solange ωG =
≪ νs
≈
|j/σ|
m e νs
νs
me
Also: Hall-Term vernachlässigbar, wenn Stoßzeit ≪ Gyrationszeit. Wenn nicht, dann ist die Leitfähigkeit nicht
isotrop!
Druckdiffusionsterm: Für die Abschätzung dieses Terms betrachtet man den statischen Fall (~v = 0, ∂/∂t =
~ = ∇p.
~ Damit sieht man, dass der
0). Dann folgt aus der Bewegungsgleichung (ohne Gravitation), dass ~j × B
Druckdiffusionsterm im Ohmschen Gesetz von der gleichen Größenordung wie der Hall-Term ist.
(Für n = n(pe ) kann er als Gradient geschrieben werden, der durch ein statisches Feld kompensiert werden kann. Dies
~ des
geht aber nicht bei einem rotierenden Stern → Batterie-Effekt!?) Um diese Behauptung zu beweisen muss man ∇×
1
~ × ~j/µ + 1 ∇
~
~ × ∇p
~ e+ ∇
~ e .
Ohmschen Gesetzes anschauen, dies ist dann die Indukionsgleichung: Ḃ = ∇
× ∇p
ne | {z }
| ne {z }
=0
=0, wenn n=n(pe )
n = n(pe ) ist bei rotierenden Sternen nicht möglich, daher muss ein Strom fließen, um diesen Term zu kompensieren →
Batterie-Effekt.
2.4.4
Raumladung
Die Raumladung ist auch bei Quasineutralität i.A. nicht Null. Sie kann insbesondere nicht unabhängig vorge~E
~ und bei hoher Leitfähigkeit (das geht auch wenn νs groß ist) – unter
geben werden, sondern folgt aus ϑ = ǫ∇
Berücksichtigung des Ohmschen Gesetzes – auch aus:
~ v × B)
~
ϑ = −ǫ∇(~
~ = −~v × B.)
~
(Aus dem Ohmschen Gesetz folgt für σ → ∞: E
2.5
2.5.1
∂
∂t
3.DS
Energie- und Zustandsgleichung
Magnetische Energiedichte: B 2 /2µ
~2
B
2µ
!
=
=
=
−
~
B
~ · (E
~ × B)
~ − 1E
~ · (∇
~ × B)
~ =
~ × E)
~ = −1∇
· (∇
µ
µ
µ
1~
~ × B)
~ − ~j · (~j/σ − ~v × B)
~
− ∇
· (E
µ
2
~
~
~ · (E
~ × B ) − j − ~v · (~j × B)
−∇
µ
σ
~ 2 /∂t = 2B
~B
~˙
∂B
~ · (E
~ × B)
~ =B
~ ·∇
~ ×E
~ −E
~ ·∇
~ ×B
~
∇
~ = ~v · (B
~ ×~j) = −~v · (~j × B)
~
~j · (~v × B)
Also: Verlust der magnetischen Feldenergie pro Raum und Zeit = elektromagnetische Energie, die rein- oder
~ an der Materie
wegfließt (Divergenz des Poynting-Vektors) + Joulsche Wärme + Arbeit, die das Feld über ~j × B
verrichtet.
12
2.5.2
Kinetische Energiedichte: ρv 2 /2
Identität:
Aus Kontinuitäts- und Bewegungsgleichung folgt:
∂ ρ~v 2
v2 ~
~ − ∇p
~ − ρ(~v · ∇)~
~ v
= − ∇
· ρ~v + ~v · ρ~g + ~j × B
∂t
2
2
~
~ − ∇p)
~
= −∇(~v ρv 2 /2) + ~v · (ρ~g + ~j × B
~ 2 − ~v × (∇
~ × ~v )
~ v = 1 ∇v
~v · ∇~
{z
}
|
2
=0
~ · α~a = α∇
~ · ~a + ~a∇α;
~
∇
α := ~v 2 /2; ~a = ρ~v ;
~
~j × B-Term
kommt in kinetischer und magnetischer Energie mit unterschiedlichem Vorzeichen vor: Kinetische
Energie wird in magnetische Energie umgewandelt, oder andersrum.
2.5.3
Innere oder thermische Energiedichte e
1. Hauptsatz der Thermodynamik: de = T dS − pdV (pro Masse, keine Ionisation, V = 1/ρ).
de = T dS +
p dρ
p~
· ~v
= T dS − ∇
2
ρ dt
ρ
Pro Volumen gilt die Wärmebilanz:
ǫ: Wärmequellen, inkl. j 2 /σ;
~h: Wärmestromdichte;
dQ
dS
~ · ~h + ǫ
ρ
= ρT
= −∇
dt
dt
also:
ρ
de
~ · ~h + ǫ − p∇
~ · ~v
= −∇
dt
~
Dann gilt für die ortsfeste Ableitung der inneren Energie pro Volumen, ρe (verwende: de/dt = ∂e/∂t + ~v · ∇e):
∂ρe
∂t
=
=
∂ρ
∂e
~ · (ρ~v ) − ∇
~ · ~h + ǫ − p∇
~ · ~v − ρ~v · ∇e
~
+ρ
= −e∇
∂t
∂t
~ · eρ~v − ∇
~ · ~h + ǫ − p∇~
~v
−∇
e
Rechte Seite der thermischen Energiebilanz:
~ , λ: Wärmleitfähigkeit. → Diffusionsgleichung.
• Wärmeleitung: ~h = −λ∇T
• Adiabatische Energiegleichung: Kein Wärmeaustausch (genauer: kein Entropieaustauch) eines Plasmapaketes mit der Umgebung. Wenn gleichzeitig das ideale Gasgesetz p = (R/µ)ρT gilt, dann kann die thermische Energiebilanz als algebraische Gleichung (anstatt einer Differentialgleichung) geschrieben werden:
p ∝ ργ , γ = cp /cV (bei idealem Gas γ = (f + 2)/f = 5/3). (Viel Spaß beim Beweis dieser Behauptung!)
2.5.4
Gesamtenergiebilanz
(Addition der Terme aus 2.5.1, 2.5.2, & 2.5.3):
(
)
2
~ ×B
~
∂ B2
ρv 2
j2
E
ρv
~ ·
+
+ ρe = −∇
+ ~v
+ eρ + p − ~h + ǫ −
+ ~v · ρ~g
∂t 2µ
2
µ
2
σ
~ nicht!
• In der Bilanz erscheint ~v · (~j × B)
13
• Ebenso treten nur (ǫ − j 2 /σ), d.h. chemische, nukleare Quellen auf. Hätten wir noch Viskosität, träte statt
dessen ǫ − j 2 /σ − ǫν auf. Reibungs- und Ohmsche Verluste erhöhen nur ρe auf Kosten der kinetischen und
magnetischen Energiedichte, ändert aber nicht die Gesamtbilanz.
• ~v · ρ~g ist ein spezieller Fall für Arbeit, die von äußeren Kräften geleistet wird.
• eρ + p ist die Enhalpie pro Volumen (Beispiel: Sonnenwind).
• Alfvén-Zahl:
s
√
v µρ
ρv 2 /2
v
=A;
=
=
2
B /2µ
B
vA
B
vA := √
µρ
A = 1: Äquipartition zwischen kinetischer und magnetischer Energie.
• Bemerkung: In MHD-Näherung ist Strahlung vernachlässigt. Der Energietransport durch Strahlung wird,
wenn notwendig, in der Energiegleichung berücksichtigt. In optisch dickem Plasma kann dieser als Diffusion, d.h. in Form einer Wärmeleitung berücksichtigt werden. Ansonsten muss das Strahlungsfeld (durch
Lösung der Strahlungstransportgleichung) berechnet werden.
Zustandsgleichung: Die Zustandsgleichung schließt das Gleichungssystem. Zur thermodynamischen Beschreibung werden 2 Zustandsgrößen benötigt, also 2 Gleichungen: Energiegleichung + Zustandsgleichung.
2.6
Zusammenstellung der Gleichungen
Maxwell-Gleichungen der
MHD:
~ ·B
~ = 0) ;
(∇
~ ×E
~ = −B
~˙ ;
∇
~ ·E
~ = ϑ/ǫ] ;
[∇
∂ρ ~
+ ∇ · (ρ~v ) = 0
∂t
Kontinuität:
Bewegung:
ρ
d~v
~ + ρ~g + ~j × B
~
= −∇p
dt
(+ρν△~v )
~
me ∂~j
~ + ~v × B
~ − 1 ~j × B
~ e− j
~ + 1 ∇p
=E
2
e n ∂t
ne
ne
σ
Ohmsches Gesetz:
Energiegleichung:
1~
~ = ~j ;
∇×B
µ
∂
∂t
B2
ρv 2
+
+ ρe
2µ
2
(
)
2
~ ×B
~
j2
E
ρv
~
~
= −∇·
+ ~v
+ eρ + p − h +ǫ− +~v ·ρ~g
µ
2
σ
Zustandsgleichung: z.B.
p=
R
ρT
µ̃(ρ, T )
• Die unterstrichenen Term werden meistens vernachlässigt.
~ ·B
~ = 0 ist eine Anfangsbedingung und wird dann durch die anderen beiden Maxwell-Gleichungen
• ∇
garantiert. Jedoch: bei numerischer Lösung muß dies überprüft werden.
• R = NA k = 8.3143 J/K/mol: allgemeine Gaskonstante.
14
• Das mittlere Teilchengewicht (Molekulargewicht) µ̃ wird aus der Saha-Gleichung bestimmt, welche den
Ionisationsgrad der einzelnen Ionen angibt. Beispiel: Neutrales Wasserstoffgas: µ̃H = mH NA ≈ 1.67 ·
10−27 · 6 · 1026 kg/kmol ≈ 1 kg/kmol.
• 6 + 1 + 3 + 3 + 1 + 1 = 15 Gleichungen.
~ E,
~ ~j, ~v , p, ρ, T ⇒ 3 + 3 + 3 + 3 + 1 + 1 + 1 = 15 Unbekannte.
• Unbekannte: B,
3
3.1
Induktion
Induktionsgleichung
~ im Ohmschen Gesetz eliminiert werden:
Aus den Gleichungen der MHD kann ~j und E
~˙ = −∇
~ ×E
~ = −∇
~ × (~j/σ − ~v × B)
~ =∇
~ × (~v × B
~−
(B
~ × η∇
~ ×B
~
~˙ = ∇
~ × (~v × B)
~ −∇
B
{z
}
{z
} |
|
Dissipation
Induktion
η :=
[η = const.;
1 ~
µσ ∇
~
× B).)
~
Induktionsgleichung (homogen und linear in B)
(8)
1
magnetische Dissipation
µσ
~ × η∇
~ ×B
~ ≡ η△B]
~
∇
Das Verhältnis der beiden Terme rechts heißt magnetische Reynoldszahl:
∇
~ vL
vB/L
~ × (~v × B)
=
Rm = ≈
~ × η∇
~ ×B
~ ηB/L2
∇
η
Rm ≫ 1: Induktion überwiegt, “hohe Leitfähigkeit”
Rm ≪ 1: Dissipation überwiegt.
• Dissipationszeit τD ≈ L2 /η.
Zeitskalen:
3.2
• Induktionszeit τI ≈ L/v.
Der magnetische Fluss durch eine flüssige Linie: Das Konzept der eingefrorenen Magnetfelder
(Kippenhahn und Möllenhoff, S.59ff)
C(t+dt)
f(t+dt)
4.DS
Wir betrachten den magnetischen Fluss φ durch eine Fläche f (t), die von einer
geschlossenen Kurve C umrandet sei. Die Kurve C sei an die Plasmamaterie
gebunden → flüssige Linie. Der Fläche f (t) wird ein gerichtetes Flächenelement
~ (t) zugeordnet. Der magnetische Fluss φ(t) durch die Fläche f (t) ist gegeben
df
durch:
Z
~ (t)
~ · df
B
φ(t) =
F (t)
C(t)
f(t)
v dt
~ ·B
~ = 0,
[Die RFläche, die von HC eingeschlossen wird, ist nicht eindeutig, aber wegen ∇
~
~
~
~
und V ∇ · B dV = ∂V B · df folgt, dass der Fluss durch die jeweilige Fläche immer
der gleiche ist.]
Die flüssige Linie überstreicht in der Zeit dt eine Mantelfläche M , deren (ge~ dt ist.
richtetes) Flächenelement df~M = ~v × dl
dl
Der magnetische Fluss kann sich ändern, weil
15
1. sich die Magnetfeldstärke ändert, also dφ1 =
R
F
~ .
~˙ · df
dt B
2. und/oder weil Feldlinien durch die Mantelfläche ein- oder austreten, also dφ2 =
Also:
dφ = φ(t + dt) − φ(t) =
Z
F
~ +
~˙ · df
dt B
Z
FM
~ · df~M = dt
B
Z
F
~ +
~˙ · df
B
Mit dem Satz von Stokes ergibt sich
I
I
Z
~
~
~
~
~
~ × (~v × B)
~ df
B · (~v × dl) = − ~v × B · dl = − ∇
C
C
Also:
dφ = dt
I
C
R
FM
~ · df~M
B
~
~ · (~v × dl)
B
.
F
Z
~
~˙ − ∇
~ × (~v × B))
~ df
(B
F
Aus der Induktionsgleichung folgt:
dφ
=−
dt
Z
~ =−
~ × η∇
~ ×B
~ df
∇
F
Z
F
I ~
~
j ~
~ =−
~ × j df
dl
∇
σ
σ
C
Eingefrorene Feldlinien: Wenn σ → ∞, dann bleibt der Fluss durch die flüssige Linie konstant, φ = const.,
d.h. dass die Feldlinien von dem Plasma mitgenommen werden.
Beispiel: Interstellare Wolke −→ Kontraktion zu einem Stern. Bei φ ∝ BR2 = const., gilt B ∝ R−2 oder, da
ρ ∝ R−3 , auch B ∝ ρ2/3 .
Interstellare Wolke: ρWolke = 10mH /cm−3 ≈ 10−20 kg/cm−3 . Galaktisches Magnetfeld: ca. 10−10 T. Daraus
ergibt sich bei eingefrorenen Felder: ρ∗ ≈ 103 kg/cm−3 , und somit (ρ∗ /ρW ≈ 1016 , und B∗ ≈ BW · 1016 T
≈ 106 T. !Viel zu groß! Also muss entweder das Anfangsfeld sehr viel kleiner sein, oder magnetischer Fluss muss
während der Sternentstehung effizient wegtransportiert werden. → Sternenwind → Magnetisches Bremsen →
Verlust von Drehimpuls.
Stern – Weißer Zwerg: B∗ ≈ 10−2 T; R∗ ≈ 106 km; RWZ ≈ 104 km; → BWZ ≈ 102 T. [passt]
Stern – Pular: RP ≈ 10 km;→ BP ≈ 108 T. [passt auch]
3.3
Dissipation von Magnetfeldern
Sei v = 0, und σ = constant. Dann:
~
dB
~ ×∇
~ ×B
~ = η△B
~
= −η ∇
dt
~ ∇×
~ B
~ = ∇(
~ ∇·
~ B)−△
~
~
∇×
B;
~ ≡ (∇·
~ ∇)
~ B)
~
△B
~
~ 0 (t) exp(i~k · ~x).
DGL mit konstanten Koeffizienten: B(t)
=B
⇒
~ 0 (t)
dB
~ 0 (t)
= −ηk 2 B
dt
→ Die Dissipation von Magnetfeldern
folgt einem Diffusionsprozess.
Typische Zeit, T τ :
1
L2
1
|B|
µσL2
τ ≈ dB = 2 = 2 =
2
ηk
4π
η
4π
dt
L: Wellenlänge, d.h. typische Längenskala.
Zu vergleichen mit: τD = L2 /η; (η = 1/µσ).
16
3.3.1
Beispiele
Auf welcher Skala muss ein Flare stattfinden, wenn er einige Minuten dauert? (Wie klein muss L
in der Korona sein, um in 100 sec. ein Feld dissipieren zu können? Bzw. die Dicke d = L/2 der Stromführenden
Schicht?)
s
√
d = π ητ = π
T
≈ 30m
µσ
µ = 4π · 10−7 Vs/Am ; σ = 5 · 105 A/Vm;
T ≈ 106 K (σ ∝ T 3/2 , Spitzer )
→ Sehr klein! Leitfähigkeit? Kontinuumsbeschreibung?
Wie schnell zerfällt ein Sonnenfleck?
d = L/2 = 30 · 106 m;
σ = 0.1A/Vm ⇒ τ = µσ
d2
≈ 107 s ≈ 4 Monate
π2
Stimmt eigentlich mit der Beobachtung überein. Jedoch ist σ in nur wenig tiefer viel größer, da dort das Gas
heißer und vollständig ionistiert ist, σ ≈ 100 A/Vm. → Problem! → Später: L sehr viel kleiner, sodaß σ durch
σturb. (turbulente Leitfähigkeit) ersetzt werden muss.
Schachbrett: Turbulente Dissipation τDL ≈ L2 /η; L = nl ⇒
τDl ≈
1 L2
τL
l2
= 2
≈ D2
η
n η
n
Turbulentes Bewegung sorgt für schnelles Abklingen des Feldes.
3.4
3.4.1
Magnetfeldkonzentration durch Strömungen
Kinematisches Beispiel
z
s
von oben:
s
~ = α(0, sB, 0);
~v × B
s
s
(Buch von Moffat p.49)
Zylinderkoordinaten (s, φ, z), ~v gegeben:
~v = α(−s, 0, 2z).
~ · ~v = α(−2 + 2) = 0.
→∇
~˙ = 0) der Form B
~ =
Stationäre Lösung (B
(0, 0, B(s)) gesucht.
s
1 ds2 B
~
~
;
∇ × (~v × B) = α 0, 0,
s ds
1 d dB
~
~
~
~
−η ∇ × ∇ × B = η△B = η 0, 0,
s
s ds ds
(Letzte Gleichung: Nicht allgemein richtig, hier O.K. wegen spezieller Geometrie.)
⇒ Induktionsgleichung (nur z-Komponente):
0=
α ds2 B η d dB
s
+
ds } |s ds{z ds}
|s {z
Induktion
integriert: αs2 B = −ηs
17
dB
+C
ds
Dissipation
B=−
η dB
C
+ 2
αs ds
αs
C = 0, sonst B im Zentrum singulär. [Im Nullpunkt muß dB/ds = 0 sein, da sonst jφ (= −1/µdB/ds) endlich
und Letzteres geht nicht.]
1 dB
αs
=−
B ds
η
⇒
⇒
ln B = ln Bmax −
αs2
B = Bmax exp −
2η
αs2
2η
(Gaußkurve)
5.DS
p
Bei s = se = 2η/α ist B = Bmax /e.
R∞
η
Gesamtfluss Φ = 0 B 2πs ds = 2πBmax α , oder Bmax = Φ2 .
πse
R∞
( 0 x exp(−αx2 )dx = 1/2α)
Endliches Gebiet: Sei der gesamte Fluss anfangs über ein Gebiet der Größe l2 verteilt (Strömungszelle der
Größe l), und sei das Anfangsfeld B0 , dann gilt
Φ = l 2 B0 ,
also: Bmax =
αl2
Rm
B0 =
B0
2πη
2π
, wenn v in Rm gleich αl.
p
2/Rm ≪ l, d.h.: Konzentration des Feldes auf engem Raum!
p
√
Dasselbe Ergebnis aus Gleichgewicht: Zerfallszeit d2 /η = Induktionszeit l/v. → d = ηl/v = l/ Rm .
Ist Rm ≫ 1, dann gilt Bmax ≫ B0 und se = l
Bmax ergibt sich aus dem Gesamtfluss:
Bmax d2 = B0 l2 ⇒ Bmax =
Analog für eine Schicht: Bmax d = B0 l ⇒ Bmax =
3.5
l2
d2 Rm
B
=
B0 = Rm B0
0
d2
d2
√
Rm B0 .
Konvektiver Kollaps
Voriges Beispiel: Kinematische Betrachtungsweise, Bmax ∝ B0 . Wie groß wird Bmax absolut?
→ Dünne magnetische Flussröhre.
Beispiel: Granulation, Bright points!
4
Dynamik dünner magnetischer Flussröhren
Ideale MHD ⇒ η → 0, σ → ∞.
18
4.1
Waléngleichung
~ · (ρ~v ) = 0
Kontinuität: ρ̇ + ∇
~˙ = ∇
~ × (~v × B)
~
Induktionsgleichung: B
~ 1 d
~
~
d B
~ − B dρ = 1 ∇
~ × (~v × B)
~ + 1 (~v · ∇)
~ · ~v =
~ B
~ + B∇
B
=
2
dt ρ ρ dt
ρ dt
ρ
ρ
ρ
1 ~ ~
~ · ∇)~
~ v − (~v · ∇)
~ B
~ +B
~∇
~ · ~v + (~v · ∇)
~ B]=
~
∇ · ~v ) + (B
= [−B(
ρ
4.2
4.2.1
!
~
B
~
· ∇ ~v
ρ
Näherung dünner magnetischer Flussröhren
Annahmen
Ein Bündel magnetischer Feldlinien:
^
t
z
• axialsymmetrisch
• physikalische Einheit (in einen Hintergrund eingebettet).
⇒ Ideale MHD, d.h. keine Dissipation.
⇒ Alle involvierten Längenskalen H groß gegenüber dem Röhrendurchmesser RT sind.
Dann: RT /H ≪ 1, oder k · RT ≪ 1, wobei k die Wellenzahl einer
beliebigen Störung entlang der Röhre ist.
Hier: Dünne Flussröhre in einer Ebene!
t̂: (Einheits-) Tangentenvektor; n̂: (Einheits-) Normalenvektor.
ϑ
x
^
n
x
~ = B t̂
B
4.2.2
Formale Herleitung
Zylinder-Koordinaten: (r, φ, z)
Taylor-Entwicklung aller Variablen im Röhrenabstand r um r = 0:
Aufgrund der Axialsymmetrie haben p, ρ, vz , Bz haben nur gerade Terme in r, z.B.:
p = p0 (z, t) + p2 (z, t)r2 + ... ,
ρ = ρ0 (z, t) + ρ2 (z, t)r2 + ... ,
vz = vz0 (z, t) + vz2 (z, t)r2 + ... ,
Bz = Bz0 (z, t) + Bz2 (z, t)r2 + ... ,
~ nur ungerade Terme haben, z.B.:
während die r- und φ-Komponenten von ~v und B
vr = vr1 (z, t)r + vr3 (z, t)r3 .
vφ = vφ1 (z, t)r + vφ3 (z, t)r3 .
~ = (0, A, 0), mit B
~ = ∇
~ ×A
~ + (0, Bφ , 0), und Bs := − ∂A
Einführung eines Vektorpotentials A
∂z
1 ∂
s ∂s (sA) . A wird in ungeraden Potenzen entwickelt.
& Bz :=
Die Näherung dünner Flussröhren besteht nun darin, dass die Entwicklungen in die Gleichungen der idealen
MHD eingesetzt werden, um dann nur Terme 0. Ordnung in r zu berücksichtigen.
19
Für eine vertikale Flussröhre folgt [⇒ Stix 2002, Ferriz Mas & Schüssler 1989, Geophys. Astrophys. Fluid
Dynamics 48, 217]:
Eliminiere vs1 und ersetze A1 mit Bz0 /2:
ρ0 (v̇z0 + vz0 v ′ z0 ) = −p′0 − ρ0 g
ρ
ρ̇0 + (ρ0 vz0 )′ + 2ρ0 vs1 = 0
B2
= pe
2µ
∂ ρ
∂ ρ
+
v
=0
∂t B
∂z
B
p0
p˙0 + vz0 p′ 0 = γ(ρ̇0 + vz0 ρ′0 )
ρ0
p+
Ȧ1 = −vz0 A′ 1 − 2vs1 A1
p0
p˙0 + vz0 p′ 0 = γ(ρ̇0 + vz0 ρ′0 )
ρ0
p0 +
dv
= −p′ − ρg
dt
2 2
A = pe
µ 1
Die resultierenden Gleichungen stimmen mit denen überein, die wir im folgenden etwas lascher für herleiten
wollen.
Bemerkung 1: Alle Variablen hängen nicht vom Achsabstand r ab. Auf einem Querschnitt durch die Röhre
sind alle Variablen konstant.
vr1 und Br1 kommen zwar formal in Kontinuitäts- und/oder Indukionsgleichung vor, jedoch wird vr1 eliminiert
~ ·B
~ = 0 wird 2Br1 = −∂Bz0 /∂z ersetzt.
durch die Formulierung der Waléngleichung und aus ∇
Bemerkung 2: Wenn man eine Ordnung mehr berücksichtigt, erhält man die ”two-mode-approximation”
(Zhugzdha 2002).
4.3
4.3.1
Gebogene dünne magnetische Flussröhre
Druckgleichgewicht der Röhre
Der äußere Rand der Flussröhre r = RT stellt eine tangentiale Diskontinuität dar, bei der das Magnetfeld von
einem endlichen Wert auf Null abfällt. Da die Röhre im Druckgleichgewicht mit dem Umgebungsdruck pe sein
soll, muss gelten:
B2
B2
p+
= pe , pe = pb + b .
2µ
2µ
Tangentieller Magnetfeldvektor:
~ = B t̂
B
4.3.2
Lagrange-Koordinate
Als unabhängige Koordinate für die Beschreibung der gekrümmten Röhre in der Ebene (x, z) wählen wir die
aufintegrierte Masse a entlang
R s der Flussröhre: wenn ξ = ∂a/∂s die Massenbelegung pro Bogenlänge ds ist, dann
ist a gegeben durch a(z) = s0 ξ ds + a0 .
Den Positionsvektor ~x(a, t) der einzelnen Massenpunkte erhält man durch Aufintegration der Geschwindigkeiten:
x(a, t) = x0 +
Z
t
′
′
vx (a, t )dt ,
z(a, t) = z0 +
t
vz (a, t′ )dt′
t0
t0
~l := ∂~x ,
∂a
Z
~l
t̂ = ,
l
l=
20
∂s
1
= ,
∂a
ξ
ρ=
1
.
Al
Flusserhaltung: φ = BA = BRT2 π.
Die Flusserhaltung läßt sich dann auch so formulieren:
B
= φl.
ρ
4.3.3
Waléngleichung in der NdF
∂~v
d~l
=
dt
∂a
i+2
da i = a i+1 - a i
i+1
j+1
i
j
da i
2
i-1
→ staggered grid bietet sich an.
: v, x
j-1
: l, B, p,T , ρ
4.3.4
Bewegungsgleichung in der NdF
~ v ) = −∇p
~ + ρ~g + ~j × B
~
ρ(~v˙ + ~v · ∇~
Lorentzkraftdichte:
2
~ 2 = B B ∂ t̂ + t̂ ∂B − 1 ∇B
~ 2 = B 2 κn̂+ 1 t̂ ∂B − 1 ∇B
~ 2
~ B)×
~ B
~ = (B
~ · ∇)
~ B
~ − ∇(
~ B
~ · B)
~ = B(t̂· ∇)B
~ t̂− 1 ∇B
(∇×
2
∂s
∂s
2
2 ∂s
2
Zusammenhang zwischen Krümmung und Normalenvektor: κn̂ = ∂ t̂/∂s.
Setzt man dies in die Bewegungsgleichung ein so ergibt sich, unter der weiteren Annahme, dass der Hintergrund
~ b = ρb~g :
im hydrostatischen Gleichgewicht ist, ∇p
ρ
2
2
2
d~v
~ −∇
~ B + ρ~g + B κn̂ + 1 t̂ ∂B =
= −∇p
dt
2µ
2µ
2µ ∂s
~ b−
= −∇p
B2
1 ∂B 2
1 ~ 2
∇Bb + ρ~g +
κn̂ +
t̂
=
2µ
2µ
2µ ∂s
= ~g(ρ − ρb ) +
1 ∂B 2
1 ~ 2
B2
∇Bb
κn̂ +
t̂
−
2µ
2µ ∂s
2µ
Die tangentielle und senkrechte Komponente der Bewegungsgleichung:
t̂ρ
n̂ρ
d~v
= n̂ · ~g (ρ − ρb )
|
{z
}
dt
Auftrieb
d~v
∂p
=−
+ ρt̂ · ~g
dt
∂s
n̂ ~ 2
B2
− ∇B
+ κ
b
2µ
2µ
| {z }
| {z }
magn. Krümmungskraft ’diamagnetische’ Kraft
21
4.3.5
Energiegleichung:
Adiabatische Zustandsänderung:
~ = (p Γ1 /ρ)(ρ̇ + ~v · ∇ρ)
~
ṗ + ~v · ∇p
∂ ln p
ρ0
cp
∂ ln p
Γ1 =
= c2
(= 1)
= χρ ; χρ =
∂ ln ρ S
p0
cV
∂ ln ρ T
Bemerkung: Bei Flussröhren in der Photosphäre muss der Energieaustausch durch Strahlung mitberücksichtigt
werden. → Strahlungsrelaxation.
4.3.6
Anwendungen
• Aufstieg magnetischer Flussröhren durch die Konvektionszone.
• Dynamik penumbraler Flussöhren
• Konvektiver Kollaps
4.4
Konvektiver Kollaps
Magnetfeldkonzentration durch Strömungen. In Kapitel 3 kinematische Betrachtungsweise. Dabei war Bmax ∝
B0 , d.h. B0 blieb freier Parameter, und ~v war vorgegeben und wurde nicht mittels der Bewegungsgleichung
bestimmt.
Wie groß wird Bmax absolut? ⇒ Dynamische Betrachtungsweise notwendig und in der NdF möglich.
Plausibel wäre z.B. die Äquipartitionsfeldstärke (A = 1).
Sonnenatmosphäre: ρ = 3 × 10−4 kg/m3 , (µρ)1/2 = 2 · 10−5 ,
√
Be = u µρ.
Supergranulation: 500 m/s → Be = 0.01T . Granulation: 1000 m/s → Be = 0.02T . ⇒ Zu wenig!!!
Aber: solch schwache Feldkonzentrationen sind instabil in einer Schicht, die überadiabatischen Temperaturgradienten hat [Parker, 1978].
Betrachte: vertikale dünne Flussröhre mit Querschnitt F (z, t).
[Massenerhaltung bedeutet, dass F1 v1 ρ1 − F2 v2 ρ2 = ∂/∂t(ρF △z), oder, mit △z → 0:
∂
∂
(F ρ) = − (F ρv)
∂t
∂z
4 Gleichungen:
(F ∝ B −1 )]
∂ ρv ∂ ρ
+
=0
∂t B
∂z B
dp
= c2 (adiabatisch)
dρ
ρ
dv
∂p
=−
− ρg
dt
∂z
p+
B2
= pe
2µ
pe sei gegeben und von Störung unbeeinflusst.
Spruit & Zweibel 1979, Solar Physics 62, 15, oder Stix, The Sun, 2002, Abschnitt 8.2.1.
22
Gleichgewicht: v = 0, ∂/∂t = 0.
dp0
B2
= −ρ0 g, p0 + 0 = pe
dz
2µ
Nebenrechnung:
Sei B0 so, dass β = 2µp0 /B02 = konstant. Dieses B0 wird anstelle
des Ergebnisses einer kinematischen Feldkonzentration angenommen.
Das Gleichgewicht ist also:
r
pe
2µpe
dpe
1
p0 (z) =
, ρ0 (z) = −
, B0 (z) =
(1 + 1/β)
g(1 + 1/β) dz
1+β
B02
p0
= pe −
2µ
β
1
= pe
p0 1 +
β
1
B02
= pe − p0 = pe 1 −
2µ
1 + 1/β
p0 = pe −
Störung dieses Gleichgewichts:
v(z, t) = v1 (z)eiωt ,
p(z, t) = p0 + p1 (z)eiωt ,
ρ(z, t) = ρ0 + ρ1 (z)eiωt ,
B(z, t) = B0 + B1 (z)eiωt ,
Einsetzen, linearisieren, eliminieren von ρ1 , p1 , B1 : Gleichung 2. Ordung in ∂/∂z (homogen, linear).
∂2v
∂v
+ C(z)
+ D(z)v = 0
∂z 2
∂v
Der Koeffizient D(z) hängt auch noch von ω 2 ab.
Randbedingungen u = 0 bei z = z0 und z = z1 .
Eigenwertproblem für ω 2 .
stabil: alle ω 2 > 0.
instabil: mindestens ein ω 2 < 0.
...
Spruit und Zweibel finden, dass statische (stabile) Flussröhren in der solaren Photosphäre erst ab einer magnetischen Feldstärke von ca. 0.1 T möglich sind!
2-dimensionale Simultion
einer Flussröhre in der solaren Photosphähre (Steiner).
23
4.5
Magnetischer Auftrieb
Im Fall einer horizontalen (geraden) Flussröhre ist nur die Auftriebskraft, Fb = (ρ − ρe )n̂ · ~g , im Allgemeinen
nicht verschwindend.
Es ist p < Pe , und wenn man annimmt, dass T = Te , dann ist ρ < ρe , und die resultierende aufwärts gerichtete
Kraft nennt man magnetischen Auftrieb (engl.: magnetic buoyancy) (Parker 1955, Jensen 1955).
Hinreichende Bedingung für Instabilität (Auftrieb)
(Stix, 2002, 8.2.4):
∇a = (γ − 1)/γ
β(∇ − ∇a ) > −1/γ .
∇=
∂ ln T
∂ ln p
Alternativ: Eine Röhre ist instabil, wenn
B > [2µpγ(∇a − ∇)]1/2 .
In einer konvektiv stabilen Schicht, ist eine horizontale Röhre mit B > Bc instabil. Daraus ergeben sich Konsequenzen für die Speicherung magnetischen Flusses in der Overshoot-Region unterhalb der Konvektionszone der
Sonne.
24
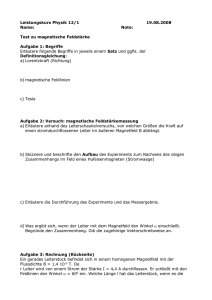
6
8
10
12
14
16
18
20
80
80
10000
60
10000
60
40
0
30
50
100
40
20
10000
Instabilitätsdiagramm
für
die
Overshoot-Region am Boden der
Konvektionszone, Fig. 8.24 in Stix
2000:
latitude [deg]
300
10000
100
50
20
10000
20
6
4.6
8
10
12
14
16
magnetic field: B0 [104 G]
m=1
m=2
stable
18
20
20
Dynamik penumbraler Flussröhren
The moving tube model.
Erklärung der (Intensitäts-) Feinstruktur, des Evershed-Effektes, und der verschiedenen Neigungen des Magnetfeldes in der Penumbra durch Einbettung einer dünnen magnetischen Flussröhre in die Penumbra, und dem
Studium ihrer Dynamik. Strahlungskühlung spielt hier eine wesentliche Rolle.
5
Magnetische Rekonnektion
(Literatur: Priest, 1981, Solar MHD)
Explosive Ereignisse auf der Sonne: freigesetzte Energie ∼ 1025 J.
<
Davon ∼ 5% in Form von elektromagnetische Strahlung (Röntgenstrahlung, “Radio bursts”, Flares im optischen,
>
und ∼ 95% als Beschleunigungsenergie von Plasma.
Es treten auf: Flares, radio bursts, eruptive Protuberanzen, koronale Massenauswürfe, koronale Wellen, und
Morton Wellen.
Ereignisse treten über aktiven Gebieten auf, wo komplexe Magnetfeldtopologien vorherrschen. V ∼ 1023 m3 ,
B ∼ 0.01 T → EB ∼ 4 × 1024 J.
Also muss man davon ausgehen, dass magnetische Energie freigesetzt wird!
Wie?
⇒ Magnetische Rekonnektion!
25
5.1
Rekonnektion an einem “X-type neutral point”
Teilchen−
beschleunigung
Rekonnektion
vi
vi
X−type neutral point
vi
vi
• Bildung einer Stromschicht durch das Zusammmenbringen von entgegengesetztem Magnetfeld.
• Einströmung von den Seiten (Verdichtung): vi ∼ 0.01 . . . 0.1 vA .
• In der Rekonnektionszone, in der die magnetische Diffusion wesentlich ist, werden Magentfeldlinien neu
verbunden, um dem Druck der Einströmung nachzugeben. → Änderung der Topologie.
• Teilchenbeschleunigung nach oben: v ∼ vA .
Erkläre Unterschied zu 3.4 Magnetfeldkonzentration durch Strömung; 3.4.1 Kinematisches Beispiel: gleichgerichtetes Magnetfeld; keine Rekonnektion möglich.
Stromschicht
Rekonnektionszone
Andere Konfiguration:
Emerging
Flux
5.2
Modellierung
Inkompressible Stagnationspunkt-Strömung:
~ = B(x)ŷ .
~v = (−v0 x/a, v0 y/a, 0) & B
Aus der Bewegungsgleichung ergibt sich:
B2
1
,
p = const. − ρv 2 −
2
2µ
und aus dem Ohmschen Gesetz:
E−
v0 x
∂B
B=η
.
a
∂x
Unter der Annahme, dass E = const. kann eine Lösung für B gefunden werden.
Wenn η = 0, dann ergibt sich B = Ea/(v0 x), und B → ∞ für x → 0. Ansonsten ist B(x) eine ungerade
Funktion mit B(0) = 0.
p
Die Dicke der Diffusionsschicht (Rekonnektionszone)
√ ergibt sich zu: l = a η/(av0 ), oder in Einheiten der
magnetischen Reynoldszahl (Rm = Lv0 /η): l = L/ Rm .
26
6
Die Dynamotheorie
[Vorlesungsskript von M. Ossendrijver, WS 1997-1998, Universität Freiburg.]
Zunächst betrachten wir den kinematischen Fall, d.h., dass ~v zeitunabhängig vorgegeben ist.
6.1
Das Dynamoproblem
Die Induktionsgleichung
~˙ = ∇
~ × (~v × B)
~ −∇
~ × η∇
~ ×B
~
B
soll für ein vorgegebenes ~v in einem endlichen Volumen, V mit Rand S, (hier Kugel) gelöst werden, wobei die
Randbedingung sein soll:
1
~ r→∞
B
−→ ∼ 3 (oder noch stärkerer Abfall)
r
[speziell für Kugel im Vakuum: stetiger Anschluss an äußeres Potentialfeld.]
Die magnetische Energie des Dynamofeldes ist:
EB =
1
2µ
Z
B 2 dV .
V
~ x , t0 )
Das Dynamoproblem ist dann so definiert: Gibt es ein Geschwindigkeitsfeld ~v (~x) so, dass ein Anfangsfeld B(~
~
~ treibt, verstärkt werden.
durch die Ströme, welche das E-Feld
~v × B
Oder anders: Ist der feldlose Fall stabil?
Im dynamischen Fall: Die MHD-Gleichungen werden konsistent gelöst. Dynamowirkung, wenn: limt→∞ EB (t) 6=
0.
6.2
Scheibendynamo
Als anschauliches mechanisches Beispiel für die Dynamowirkung betrachten wir den Scheibendynamo.
• Scheibe rotiert mit Frequenz Ω im vertikalen
(Saat-) Magnetfeld B0 .
• In der Scheibe entsteht ein elektrisches Feld
~ = ~v × B
~ = ΩrB0 êφ × êz = ΩrB0 êr ,
E
so dass ein Strom von der Achse zum Rand
fließt (bis sich ein entsprechendes entgegengesetztes elektrisches Feld aufgebaut hat).
• Wen man eine leitende Verbindung zwischen
Scheibenrand und Achse anlegt, fließt ein
Strom.
• Dieser Strom erzeugt ein zusätzliches Magnetfeld, das durch geschickte Orientierung des
Drahtes das ursprüngliche verstärken kann.
27
Die Spannung zwischen Achse und Rand (S: Fläche der Scheibe; φ1 = B S =
M I: magnetischer Fluss durch die Scheibe; M : Induktivität;). Es folgt:
~ · dS
~ = −BSΩdt/(2π) = −M IΩdt/(2π).
dφ1 = B
Die elektromotorische Kraft:
Vemk = −
dφ1
ΩM I
=
dt
2π
Die Spannung in der Spule (magnetischer Fluss φ2 = L I, L Selbstinduktion der Spule):
Vsp = −
dφ2
dI
= −L
dt
dt
Für den Strom I gilt:
Vemk + Vsp = R I
Es folgt:
L
dI
=
dt
MΩ
−R I
2π
⇒
I(t) = I(0) exp
R
L
MΩ
−1 t
2πR
⇒ gedämpfte und exponentiell wachsende Lösungen:
• Dynamowirkung falls ein dimensionslose Dynamozahl eine Schwelle überschreitet: M Ω/(2πR) ≥ 1.
• Der Scheibendynamo funktioniert nur mit einem Schleifkontakt (differentielle Rotation).
• Die Anordnung muss einen bestimmten Schraubensinn haben.
Dies sind Eigenschaften, die auch bei den kosmischen Dynamos entscheidend sind.
6.2.1
Nichtlineare Wechselwirkung: Lorentzkraft
Die lineare Behandlung des Scheibendynamos führt zu exponentiellem Wachstum, wenn die Dynamozahl superkritisch ist.
~ eine immer
Aber: Wenn I anwächst, spielt die Lorentzkraft ~j × B
größere Rolle, und die Scheibe wird gemäß der Lenzschen Regel
abgebremst.
6.3
Bemerkungen über toroidale und poloidale Vektorfelder
r̂: radialer Einheitsvektor; φ̂: azimutaler Einheitsvektor;
~ θ, t), B(r,
~ θ, t): Funktionen;
P (r, θ, φ, t), T (r, θ, φ, t), A(r,
~ ·B
~ = 0 folgt: B
~ =∇
~ × A,
~ mit
Mit ∇
~ = ∇Φ
~ + T r̂ + ∇
~ × P r̂
A
, und
~ =∇
~ × T r̂ + ∇
~ ×∇
~ × P r̂ = Bt + Bp
B
28
“toroidal”:
“poloidal”:
~t = ∇
~ × (T r̂) = (0, . . . , . . .) ≡ −r̂ × ∇T
~
B
~ axialsymmetrisch, dann B
~ t = Bφ φ̂
Wenn B
~
~
~
Bp = ∇ × ∇ × (P r̂) = (. . . , . . . , . . .)
~ axialsymmetrisch, dann B
~p = ∇
~ × (Aφ φ̂)
Wenn B
Die Rotation eines toroidalen Vektorfeldes ist poloidal, und andersherum.
6.4
Induktion eines toroidalen Feldes durch differentielle Rotation ( Aufwickeln“)
”
~ =B
~p + B
~ t . Sei ~vp = 0.
B
~p
~ t ∂B
∂B
~ ×∇
~ ×B
~p
~ × (~vt × B
~ p) + ∇
~ × (~vp × B
~ t) + ∇
~ × (~vp × B
~ p ) − η∇
~ ×∇
~ ×B
~ t − η∇
=∇
+
{z
}
|
∂t
∂t
|
|
|
|
{z
}
{z
}
{z
}
{z
}
|{z} | {z }
tor
tor
pol
tor
tor
pol
pol
Die toroidale Komponente der Gleichung ist:
~t
∂B
~ × (~vt × B
~ p ) − η∇
~ ×∇
~ ×B
~t
=∇
∂t
.
Die differentielle Rotation wird durch eine ortsabhängige Winkelgeschwindigkeit Ω(r, θ) beschrieben;
~v = ~vt = (0, 0, r sin θΩ(r, θ))
Wenn man sich auf den axialsymmetrischen Fall bechränkt gilt:
1 ∂
1 ∂(rA)
~ × (Aφ̂) =
~p = ∇
B
(sin θA), −
,0
r sin θ ∂θ
r ∂r
Damit:
.
∂
∂(rA)
, Ω (sin θA), 0
und nach etwas Rechnung:
sin θΩ
∂r
∂θ
~ × (~vt × B
~ p ) = 0, 0, ∂Ω ∂(sin θA) − 1 ∂Ω sin θ ∂(rA)
∇
.
∂r
∂θ
r ∂θ
∂r
~p =
~vt × B
~ = B φ̂):
Schließlich (mit B
~ ×∇
~ ×B
~t =
∇
0, 0, −△B +
B
2
r sin2 θ
,
[≡ (0, 0, −△1 B)]
Also:
∂B
∂t
=
=
∂Ω ∂(sin θA) 1 ∂Ω
∂(rA)
−
sin θ
+ η△1 B
∂r
∂θ
r ∂θ
∂r
~ ·B
~ p + η△1 B
r sin θ∇Ω
~ tritt auf, also nur differentielle Rotation!
Bemerkung: Nur ∇Ω
Skalierung: t = t∗
R2
,
η
r = xR,
Ω = Ω0 + △Ω · Ω∗ (x, θ)
R2 △Ω ~ ∗ ~
∂B
=
∇Ω · Bp + △1 B
∗
∂t
η
Magnetische Reynoldszahl der differentiellen Rotation: Rm,Ω = R2 △Ω/η.
Sonne: R = 7 × 108 m, △Ω = 10−6 s−1 , η = 108 m2 /s (später!) ⇒ Rm,Ω = 5000 ≫ 1, d.h. die differentielle
Rotation ist ein wichtiger Prozess.
29
6.5
6.5.1
(Anti-) Dynamotheoreme
Cowling’s Theorem
Ein axialsymmetrisches Feld kann nicht Lösung des
”
Dynamoproblems sein.“
Beweis: Braginsky, S.I., 1964, Sov. Phys. JETP 20, 726 und Moffat, H.K., 1978, Magnetic field generation in
electrically conducting fluids, Cambridge University press, Abschnitt 6.4
6.5.2
Toroidaltheorem (Elsasser’s Theorem)
Eine rein toroidale Strömung genügt nicht für einen
”
Dynamo.“
~ · ~v = 0 (inkompressibel).
σ = const.; ∇
Beweis: Backus, G.E., 1958, Ann. Phys. 4, 372–447.
~ p nicht regeneBemerkung: Wenn es nur differentiell Rotation gibt (~vp = 0), dann keine Dynamowirkung, weil B
~
~
riert wird, und Bt = Bφ zerfällt, wenn σ endlich. (Eine differentielle Rotation genügt nicht für einen Dynamo.)
6.6
Turbulente Leitfähigkeit und α-Effekt
Gesucht: Lösung der Induktionsgleichung
~
∂B
~ × (~v × B)
~ − η∇
~ ×∇
~ ×B
~
=∇
∂t
für turbulente Strömung ~v = ~v + ~v ′ .
~ +B
~ ′: •
~ =B
Konzept der mittleren Felder: B
•
•
•
Mittel über Volumen (≫ l, aber ≪ L);
oder über Zeit(≫ τc , aber ≪ T );
oder über eine Raumkoordinate, z.B. Länge;
oder über ein Ensemble.
~ z.B. Mittel über φ, oder über Zeit (∼ 1 Jahr);
• B:
~
• B ′ : Rest (Feldkonzentrationen);
• ~v : Differentielle Rotation, meridionale Zirkulation.
• ~v ′ : Granulation, Supergranulation, allg. Konvektion.
Sonne:
~v und ~v ′ seien beide vorgegeben, jedoch werden von ~v ′ nur statistische Eigenschaften gebraucht.
[Reynolds–]Regeln: F + G = F + G; F ′ = 0; F G = F G;
F G = (F + F ′ )(G + G′ ) = F G + F ′ G′
~ +B
~ ′ und ~v + ~v ′ in die Induktionsgleichung.
Rezept: (a) Einsetzen von B
~ und B
~ ′.
(b) Herleitung von 2 Gleichungen für B
′
~
(c) Elimination von B (geht nur mit Näherungen).
~
(d) Lösung (oder wenigstens Betrachtung) der verbleibenden Gleichung für B
Hier: Spezialfall ~v = 0, ~v ′ isotrop, aber nicht spiegelsymmetrisch (Turbulenz).
[In Wahrheit sind Vorzugsrichtungen wichtig, sonst: keine Helizität, und wie sich später rausstellt, kein α-Effekt.]
Schritt (a):
~ +B
~ ′)
∂(B
~ × (~v ′ × B)
~ +∇
~ × (~v ′ × B
~ ′ ) − η∇
~ ×∇
~ × (B
~ +B
~ ′)
=∇
∂t
30
Schritt (b): Mitteln dieser Gleichung (Vertauschbarkeit von Mittel und Differenzierungen vorrausgesetzt).
~
∂B
~
~ ′ − η∇
~ ×∇
~ ×B
~ × ~v ′ × B
=∇
∂t
Dies abziehen von der ursprünglichen Gleichung:
~′
∂B
~ ′ ) − η∇
~ ×∇
~ ×B
~′
~ × (~v ′ × B
~ + ~v ′ × B
~ ′ − ~v ′ × B
=∇
∂t
~ ′ soll durch B
~ und ~v ′ ausgesrückt werden. Rezept: Iterationsverfahren.
Schritt (c): B
~ ′ − ~v ′ × B
~ ′ weglassen und nach B
~ ′ auflösen.
1. ~v ′ × B
~ ′ in die fortgelassenen Terme einsetzen; neues B
~ ′ ausrechnen.
2. B
~ ′ sich nicht mehr ändert.
3. Dieses wieder einsetzen, u.s.f., bis B
Hier: 1. Iterationsschritt:
FOSA (first order smoothing approximation) oder
SOCA (second order correlation approximation).
für Rm ≫ 1, also:
~′
∂B
~ × (~v ′ × B)
~
=∇
∂t
In Koordinaten mit
ǫ=
⇒
Z
~′ =
B
t
t0
~ dτ + B
~ ′ (t0 )
~ × (~v ′ (τ ) × B)
∇
1 für
i, j, k = 123, 231, 312
−1 für
i, j, k = 132, 321, 213
0 sonst (21 mal)
~ m = ǫmrs vr′ B s (Summenkonvention).
dann ist: (~v ′ × B)
~ × ~v )k = ǫklm
(∇
∂vm
, also Bk′ =
∂xl
Z
t
ǫklm ǫmrs
t0
∂
(v ′ Bs ) dτ + Bk′ (t0 )
∂xl r
[≡ ~a × (~b × ~c) = (~a · ~c)~b − (~a · ~b)~c]
ǫklm ǫmrs = δkr δls − δks δlr
~ wird nun der Ausdruck ~v ′ × B
~ ′ gebraucht.
Für die interessierende Gleichung für B
~ ′ )i = ǫijk v ′ (t)
(~v ′ × B
j
∂v ′
∂Bs
+ Bs r dτ + Bk′ (t0 )
(δkr δls − δks δlr ) vr′
∂xl
∂xl
t0
Z
t
Sei t − t0 groß genug, so dass vj′ (t)Bk′ (t0 ) = 0 (unkorreliert), dann:
Z t
∂B
′
′
∂v
∂v
∂B
l
k
′
k
l
′
′
dτ
+ Bl
− Bk
−vl
= ǫijk vj (t)
vk
∂xl
∂xl
∂xl
∂xl
t0
|
{z
}
~
~ B=0
∇·
= ǫijk
Z t(
t0
∂Bk
−vj′ (t)vl′ (τ )
∂xl
+
∂v ′ (τ )
vj′ (t) k
Bl
∂xl
31
−
∂v ′ (τ )
vj′ (t) l
Bk
∂xl
)
dτ
~ nur so langsam zeitabhängig, dass es vor das Integral gezogen werden kann (bzw. seien die auftretenden
Sei B
Mittelwerte nur für kurze Zeiten |t − τ | von Null verschieden).
∂Bk
= ǫijk
∂xl
Z
t
vj′ (t)vl′ (τ ) dτ + Ai
t0
Bei isotroper Turbulenz ist jede Geschwindigkeitskomponente
nur mit sich selbst korreliert, und das nur eine
p
Zeitlang, und alle 3 gleich! Also mit v = v12 + v22 + v32 :
1 2
v δjl f (|t − τ |).
3
vj′ (t)vl′ (τ ) =
Wähle z.B.: f (|t − τ |) = exp [−|t − τ |/τc ], oder exp [−(t − τ )2 /(2τc )]:
~ ′ )i = Ai − 1 v 2 ǫilk ∂Bk
(~v ′ × B
3
∂xl
Z
t
t0
1
|t − τ |
~ i τc 1 − exp t0 − t
~ × B)
dτ = Ai − v 2 (∇
exp −
τc
3
τc
{z
}
|
→0
1
~ i = Ai − β(∇
~ × B)
~ i
~ × B)
≈ Ai − v 2 τc (∇
3
(t → −∞ macht nur kleinen Unterschied.)
zu Ai :
∂v ′
Mittelwerte der Form vj′ ∂xkl sind ungleich Null, nur wenn alle 3 Indizes verschieden sind!
Denn sie sind durch Drehungen in ihr Negatives überführbar. Das darf bei Isotropie aber gerade nicht sein, da
müssen sie invariant bleiben.
v1′
z.B.:
z.B.: bei
x1 → −x1
x2 → −x2
x3 → x3
v1′
x1 → −x1
x2 → −x2
x3 → x3
∂v2′
bei
∂x2
∂v1′
∂x2
in
− v1′
∂v1′
∂x2
Z
vj′ (t)
Also bleibt nur:
Ai = ǫijk Bl
t
t0
und
v1′
A1 =
t
t0
∂v ′ (τ )
v2′ (t) 3
∂x1
−
∂v2′
∂x3
∂v2′
∂x2
in
−v1′
∂(−v2′ )
∂x3
u.s.f.
∂vk′ (τ )
dτ
∂xl
⇒
Z
− v1′
in
∂v ′ (τ )
v3′ (t) 2
∂x1
!
dτ · B1
= α1 B1
A2 =
(Indizes zyklisch vertauschen)
= α2 B2
A3 =
(Indizes zyklisch vertauschen)
= α3 B3
Isotropie: α1 = α2 = α3 = α, also α = 13 (α1 + α2 + α3 )
′
′
#
′
Z "
′ (τ )
′ (τ )
∂v
(τ
)
∂v
(τ
)
∂v
∂v
1 t ′
∂v2 (τ ) ∂v3′ (τ )
3
1
v (t)
+ v2′ (t)
+ v3′ (t)
+ dτ
−
− 1
− 2
α=
3 t0 1
∂x3
∂x2
∂x1
∂x3
∂x2
∂x1
α=−
1
3
Z
t
t0
~ × ~v ′ (τ ) dτ
~v ′ (t) · ∇
32
Damit und mit β = 31 v 2 τc gilt:
~ − β∇
~ ×B
~
~ ′ ) = αB
(~v ′ × B
Einsetzen in Induktionsgleichung:
~
∂B
~ × (αB)
~ ×∇
~ ×B
~ − (η + β)∇
~ ×∇
~ ×B
~ =∇
~ × (αB)
~ − ηt ∇
~
=∇
∂t
Mit ~v 6= 0 lautet die Induktionsgleichung für das mittlere Feld:
~
∂B
~ × (~v × B
~ ×∇
~ ×B
~ + αB)
~ − ηt ∇
~
=∇
∂t
Schritt (d): Deutung von β = 31 v 2 τc : turbulente Dissipation. Meist ist β ≫ η, d.h.
β/η ∼ 1/3 v 2 τc /η ∼ 1/3 vl/η = 1/3 Rm ≫ 1
(war ja auch bei Berechnung von B ′ angenommen worden).
Eine neue magnetische Reynoldszahl (der Term αB beschreibt die Induktionswirkung durch die Turbulenz):
Rα =
αL
αL
αL
=
≈
ηt
η+β
β
Dies gilt nur für mittleres Feld und mit L als Skala des mittleren Feldes.
Weitere Terme durch weitere Itereationsschritte und Anisotropien! Verkürzung der Zeitskala:
L2
L2
≪
β
η
Sonne: v = 103 m/s, τc = 500 s → β = 1.5 × 108 m2 /s.,
mit L = Rsun /3 ist L2 /β = 3 × 108s = 10 Jahre. (Periode des Sonnenzykluses!)
Deutung von α: α = 0 bei Spiegelsymmetrie, d.h. hätten wir auch Spiegelungen zugelassen, dann
wären die Mittelwerte auch bei drei verschiedenen Indizes 0 geworden. z.B.:
v1′
∂v2′
∂v ′
→ −v1′ 2 ,
∂x3
∂x3
x1 → −x1
bei x2 → −x2
x3 → −x3
~ × ~v ′ 6= 0; Helizität (z.B. Schachtel von Schrauben)
~v ′ · ∇
Bemerkungen:
~ + αB
~ − β∇
~
~ ~j = σ(E
~ × B).
1. Deutung des α-Effektes als Strom parallel zu B:
~ α ist Pseudoskalar, weil er den axialen Vektor B
~ in einen polaren
α-Effekt: Strom in Richtung von B,
~
Vektor j transformiert.
Konvektionszone im Stern: Parker-Schleife: Zu solchen Schraubenbewegungen kommt es in der Konvek~ × ~v ). Nordhalbkugel:
tionszone durch Korioliskraft (−Ω
Aufstieg + Expansion + Rechtsablenkung (→ linke Schrauj
be), oder
Abstieg + Kontraktion + Rechtsablenkung (→ auch linke
B
Schraube).
33
Analog kommt es zu Rechtsschrauben auf Südhalbkugel.
2. Abschätzung von α: kleine Ω: α ∝ Ω, genauer:
α ∝ Ωτc , solange Ωτc < 1.
~ × ~v ′ = Ωτc v 2 /l, dann wird
Sei also ~v ′ · ∇
2
α ≈ v τc Ωτc /l ≈ lΩ.
Abschätzung von α mit isotroper Turbulenz in einem geschichteten Medium mit kleiner Störung durch
Korioliskraft (Krause 1968):
~∇
~ ln(ρv) ∝ Ω
~ ∇ρ,
~ α
α = −16/15τc2 v 2 Ω
süd = −αnord .
~ = 1/l und vτc = l.
α ∝ lΩ cos θ [falls v = const.: ∇ρ
Zahlenwerte für die Sonne: Ω = 3 × 10−6 s−1 : Granulation: l = 106 m ⇒ α = 3 m/s.
Supergranulation: l = 107 m ⇒ α = 30 m/s.
In Wahrheit muss α kleiner sein, wegen der Verdrängung der magnetischen Elemente aus den Konvektionszellen.
Rα =
3 · 7 × 108
αR
=
= 14
ηt
1.5 × 108
3. turbulente Leitfähigkeit: Sei η + β = ηt .
ηt =
1
σ
→ σt−1 = µ(η + β) = σ −1 (1 + Rm /3) → σt =
µσt
1 + Rm /3
~ ×B
~ = B/L
~
4. Seien ηt und α Konstanten, dann kann man leicht sehen, dass kraftfreie mittlere Felder ∇
Lösungen dieser Gleichung sind, mit exponentiellem Zeitverhalten ∼ exp(λt), mit
λ=
ηt
ηt
α
= 2 (Rα − 1) ,
−
L L2
L
das ist > 0 für Rα > 1.
5. α-Effekt: Weitere Terme durch Anisotropie und durch weitere Iterationsschritte. Es zeigt sich, dass weitere
Terme von der gleichen Größenordnung sind.
34
6.7
Kinematische α2 , α2 Ω und αΩ Dynamos
3 Eigenschaften der Strömung seien gleichzeitig vorhanden:
1. turbulente Diffusion
2. α-Effekt
3. mittlere Strömung in Form einer differentiellen Rotation.
~ + ~v ′ × B
~ + αB
~ − β∇
~ × B,
~ also (mit B
~ →B
~ und ~v → ~v )
~ = ~v × B
~ ′ = ~v × B
~v × B
~
∂B
~ ×∇
~ ×B
~
~ × (~v × B
~ + αB)
~ − ηt ∇
=∇
∂t
Dynamo-Gleichung
Im Folgenden: → !Formulierung in spärischen Koordinaten! ←
: Mittel über φ.
Sei ~v = (0, 0, r sin(θ)Ω).
~ = (0, 0, B) + ∇
~ × (0, 0, A) = B
~t + B
~ p.
Sei B
In Induktionsgleichung einsetzen und toroidale und poloidale Komponenten trennen:
~t
∂B
~ ×∇
~ ×B
~t
~ × (~vt × B
~ p + αB
~ p ) − ηt ∇
=∇
∂t
~p
∂B
~ ×∇
~ ×B
~p
~ × (αB
~ t ) − ηt ∇
=∇
∂t
2. Gleichung:
~ p (Elsässers Theorem).
α-Term jedenfalls nötig, sonst Zerfall von B
1. Gleichung:
~ p wichtiger als αB
~ p:
~vt × B
αΩ–Dynamo.
~
~
~vt × Bp weniger wichtig als αBp : α2 –Dynamo.
beide ungefähr gleich
α2 Ω–Dynamo.
(9)
(10)
in Koordinaten (r, θ, φ):
Gleichung (9):
~ × (~vt × B
~ p ) hat nur φ-Komponente, mit B
~p = ∇
~ × (0, 0, A) ist diese (siehe Abschn. 6.4)
∇
∂Ω ∂
sin θ ∂Ω ∂
(sin θA) −
(rA),
∂r ∂θ
r ∂θ ∂r
~ ×∇
~ ×B
~ t hat nur φ-Komponente; diese ist
ebenso, ∇
−△1 B ≡ −△1 B +
B
.
r2 sin2 θ
Schließlich:
1 ∂(sin θA) 1 ∂(rA)
∂α 1 ∂α
,−
,0 ×
,
,0
r sin θ
∂θ
r ∂r
∂r r ∂θ
∂α ∂(sin θA) 1 ∂α ∂(rA)
1
= 0, 0, −α△1 A − 2 2
−
∂θ
r ∂r ∂r
r sin θ ∂θ
~ × (αB
~ p ) = α∇
~ ×B
~p − B
~ p × ∇α
~ = (0, 0, −α△1 A) −
∇
Gleichung (10) entrotieren (Integrationskonstante =0 wegen ∂/∂φ = 0):
φ-Komponente:
∂A
= αB + ηt △1 A
∂t
35
Entdimensionalisierung: Neue Variable t′ und r statt t und r, und A′ statt A:
t = t′ R2 /ηt ,
r = r′ R ,
A = A′ R
(t′ und r′ dimensionslos, A′ selbe Dimension wie B.)
△1 = R−2 △′1
Außerdem sei:
Ω = △Ω0 Ω̃(r′ , θ)
(Ω̃ und α̃ sind dimensionslos
α = α0 α̃(r′ , θ)
und von der Größenordung 1)
Damit Gl. (9):
∂B
△Ω0 R2
=
∂t′
ηt
−
"
∂ Ω̃ ∂(A′ sin θ) sin θ ∂ Ω̃ ∂(r′ A′ )
− ′
∂r′
∂θ
r ∂θ ∂θ
#
α0 R
1
1 ∂ α̃ ∂(rA′ )
∂ α̃ ∂(A′ sin θ)
+ △′1 B
α̃△′1 A′ + ′2 2
+ ′
ηt
∂θ
r ∂r ∂r
r sin θ ∂θ
(11)
und Gl. (10):
∂A′
α0 R
=
α̃B + △′1 A′
∂t′
ηt
Definiere 2 Reynoldszahlen:
RΩ =
(12)
Diffusionszeit
△Ω0 R2
=
ηt
Aufwickelzeit
Rα =
Diffusionszeit
α0 R
=
ηt
R/α0
|Rα | ≫ |RΩ |: α2 –Dynamo.
|Rα | ≪ |RΩ |: αΩ–Dynamo.
Sonne:
6.7.1
|Rα /RΩ | =
lΩ
l
α0
≈
≈3 <1
R△Ω
R△Ω
R
αΩ-Typ.
αΩ-Dynamo
|Rα | ≪ |RΩ |.
Dann ist der zweite Term auf der rechten Seite von Gl. (11) vernachlässigbar und kann übersichtlicher geschrieben
werden. Die toroidale und poloidale Komponenten lauten:
h
i
∂B
′
~ ′ Ω̃ · ∇
~ ′ × (0, 0, A) + △′1 B
r
sin
θ
∇
=
R
Ω
∂t′
&
∂A′
= Rα α̃B + △′1 A′
∂t′
Bemerkungen
1. Für die Existenz der Lösung und deren Form (Eigenwert) ist nur das Produkt Rα RΩ ≡ D wichtig.
Beweis: Transformiere A′ = Rα A∗ . Für diese Betrachtung setzen wir α̃(r′ , θ) = 1.
Dann können die obigen beiden Gleichung so geschrieben werden:
h
i
∂A∗
∂B
′
~ ′ Ω̃ · ∇
~ ′ × (0, 0, A∗ ) + △′ B
r
sin
θ
∇
&
=
R
R
= B + △′1 A∗
Ω
α
1
∂t′
∂t′
⇒ D = RΩ Rα nennt man die Dynamozahl.
Oder Beweis mit Operatoren: O1 ≡
∂
∂t
− △1
36
⇒ O1 B = RΩ O2 A′ & O1 A′ = Rα B
⇒ O2−1 O1 B = RΩ A′ & O1 A′ = Rα B ⇒ O1 O2−1 O1 B = RΩ Rα B.
2. Das Verhältniss der Felder Bpol /Btor ≈ A′ /B, hängt vom Verhältnis Rα /RΩ ab.
Beweis: Die Eigenwerte von O1 und O2 sind von der Größenordnung 1 (und α̃ = 1).
Aus O1 B = RΩ O2 A′ & O1 A′ = Rα B folgt
′
′
⇒ Rα BO1 B = (RΩ O2 A )(O1 A )
⇒
A′
=
B
r
Rα
RΩ
Sonne: A ≪ B → Rα ≪ RΩ → αΩ–Dynamo.
Hat die Anfangsbedingung (Störung) eine bestimmte Symmetrie, so bleibt diese im linearisierten Gleichungssystem erhalten.
3. Wenn B und A Lösungen sind, dann sind auch −B und −A Lösungen.
4. Symmetrie:
α̃ antisymmetrisch zum Äquator: α̃(θ) = −α̃(π − θ).
Ω̃ symmetrisch zum Äquator:
Ω̃(θ) = Ω̃(π − θ).
5. Das Prinzip des αΩ–Dynamos:
~
∇Ω
α ~
~ tor
~ tor −→
Btor −→ B
B
~ eingeht und nicht Ω selbst, sollte dieses Prinzip genauer α∇Ω–Dynamo
~
Da nur ∇Ω
genannt werden.
6. Numerische Modellierung spärischer kinematischer αΩ-Dynamos: z.B. Deinzer & Stix 1971. Folie!
Vorgegeben: Ω̃ = Ω̃(x): Stufenfunktion; innen schnell außen langsam.
α̃ = α̃(x) cos θ; α̃(x) konzentriert in einer Schale.
Lösungen: siehe Abbildung; Oszillatorisch; Dipolsymmetrie hat kleinstes kritisches D;
Periode ≈ 11 Jahre; Wandern zum Äquator
6.8
Dynamische Dynamos
1. Rückwirkung der Lorentzkraft auf das Geschwindigkeitsfeld. Berücksichtigung der Bewegungsgleichung.
2. Numerische Bestimmung des α-Tensors.
37
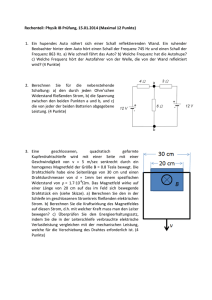
Abbildung 1: Der meridionale Querschnitt zeigt Konturen konstanter toroidaler Magnetfeldstärke auf den linken
und poloidale Feldlinien auf den rechten Seiten. Die Pfeile an den Polen geben die Richtung und die Stärke des
poloidalen Feldes wider.
38
7
Übungen
Sommer-Semester 2003 — Magnetohydrodynamik
Übungsblatt Nr. 1
Montag, 5. Mai 2003
Aufgabe 1: Teilchen im elektromagnetischen Feld (10 Punkte)
Ein Teilchen mit der Masse m und der Ladung q erfährt durch ein elektrisches Feld E und ein magnetisches
Feld B die Kraft
q(E + v × B) ,
wobei v(t) die momentane Geschwindigkeit des Teilchens ist.
a) Berechnen Sie die Bahn des Teilchens, wenn E = 0 ist und B ein homogenes Feld ist. Zeigen Sie, dass
die Bahn eine Spirale ist, und geben Sie die Kreisfrequenz des Umlaufs in der Spirale (die Larmor-Frequenz)
sowie Richtung, Radius (Larmor-Radius) und Ganghöhe der Spirale als Funktion der Anfangsgeschwindigkeit
an. (Tip: Die Zusammenfassung der beiden zu B senkrechten Geschwindigkeitskomponenten zu einer komplexen
Variablen ist von Vorteil).
b) In welcher Weise verändert das Magnetfeld die Energie des Teilchens?
c) Berechnen Sie die Bahn für den Fall, dass E und B beide homogen sind und einen endlichen Winkel miteinander bilden. Zeigen Sie, dass das Teilchen um die Feldlinien von B kreist und zusätzlich eine Drift
vD =
E×B
B2
erfährt, wobei B der Betrag der Magnetfeldstärke ist.
d) Skizzieren Sie ohne Rechnung die Bahn für den Fall, dass E = 0 ist, und das Magnetfeld inhomogen ist
in der Weise, dass B = (0, 0, Bz (y)), wobei dBz /dy = const. angenommen werden darf. Betrachten Sie ein
Teilchen, das sich senkrecht zum Magnetfeld bewegt, und überzeugen Sie sich, dass zusätzlich zur Bewegung
um die Feldlinien herum eine Drift in x-Richtung auftritt.
e) In einem Sonnenfleck sei die Magnetfeldstärke 0.1 T. Berechnen Sie die Larmor-Frequenz für ein Elektron
und für ein Proton. Nehmen Sie lokales thermodynamisches Gleichgewicht an, so dass die kinetische Energie
der Teilchen kT ist (k Boltzmann-Konstante, T Temperatur). Wie groß sind die Larmor-Radien bei einer
Temperatur von 4000 K ?
f) Berechnen Sie Larmor-Frequenz und Larmor-Radius für Elektron und Proton im Sonnenwind, bei B = 10−9 T
und T = 105 K.
g) Die Spiralbewegung der geladenen Teilchen wird immer wieder durch Stöße unterbrochen. Nach einer Formel
von L. Spitzer gilt in einem voll-ionisierten Gas für die Zeit zwischen zwei Stößen die Näherung τ ≈ 2 ×
104 T 3/2 n−1 s, wobei T in K und die Teilchendichte n in m−3 eingesetzt werden muss. Wieviele Umläufe schaffen
Elektronen und Protonen in einem Sonnenfleck mit den angegebenen Daten sowie n = 1017 m−3 ?
Abgabetermin: Montag, 12. Mai 2003 (in der Vorlesung)
39
Sommer-Semester 2003 — Magnetohydrodynamik
Übungsblatt Nr. 2,
Montag, 19. Mai 2003
Aufgabe 1: Die magnetische Kraft (4 Punkte)
a) In der Vorlesung wurde gezeigt, dass die Dichte der magnetischen Kraft, j × B, auch in der Form
−grad pm +
1
(B · grad )B
µ
geschrieben werden kann, wobei pm = B 2 /2µ. Zeigen Sie, dass in Richtung des magnetischen Feldes die Komponenten der beiden Terme sich gerade aufheben.
b) In kartesischen Koordinaten ist die magnetische Kraftdichte
fi =
∂Mik
.
∂xk
Zeigen Sie, dass der Maxwell-Spannungstensor durch Mik = (δik B 2 /2 − Bi Bk )/µ gegeben ist.
c) Das magneto-hydrostatische Gleichgewicht in einem Sonnenfleck verlangt, dass der interne Gasdruck zusammen mit dem magnetischen Druck dem externen Gasdruck gleich ist: pi + pm = pe . Wie groß ist die Temperatur
eines kleinen Sonnenflecks, wenn pe = 3 · 104 Pa ist, Feldstärke und Dichte im Fleck 0.2 T bzw 5 · 10−4 kg/m3
betragen, und das Gas Massenanteile von 75 % Wasserstoff und 25 % Helium (beide neutral) hat?
Zusatzfrage: Welche Rolle spielen für dieses Problem (ebenso wie für viele andere MHD-Probleme der Sonnenatmosphäre) die übrigen Elemente?
d) Für ein kraftfreies Feld ist j × B = 0. Das bedeutet: Entweder ist j = 0 (der triviale Fall eines PotenzialFeldes), oder j und B sind überall parallel: j = αB, mit einer skalaren Ortsfunktion α(r). Ist α(r) eine beliebige
Ortsfunktion, oder gibt es Einschränkungen?
Aufgabe 2: Walén-Gleichung (3 Punkte)
Aus der Kontinuitätsgleichung und der Induktionsgleichung soll – für den Fall unendlich guter Leitfähigkeit –
die Walén-Gleichung:
d
dt
B
ρ
=
B
· grad
ρ
v
hergeleitet werden. Deuten Sie diese Gleichung am Beispiel einer dünnen Flussröhre, d.h. eines schlauchförmigen
von einem Magnetfeld durchsetzten Gebildes, dessen Begrenzung überall parallel zum Feld verläuft, und in
welchem kompressible Materie parallel zum Feld strömen kann.
bitte wenden
40
Aufgabe 3: Polytropen (3 Punkte)
Das System der MHD-Gleichungen muss i.A. durch eine Energie-Gleichung vervollständigt werden. In vielen
Fällen genügt jedoch als Ersatz eine einfache Beziehung zwischen Druck und Dichte, z.B. die Polytrope
p
=
p0
ρ
ρ0
1+1/m
,
wobei m der Polytropen-Index ist. Zeigen Sie, dass in einer polytropen Atmosphäre im hydrostatischen Gleichgewicht die Temperatur eine lineare Funktion der Höhe ist, wenn es sich um ein ideales Gas mit konstantem
mittleren Molekulargewicht handelt. Berechnen Sie den Temperaturgradient. Welche Sonderrolle spielt der Fall
m = 1.5 für ein Gas von einatomigen Teilchen?
Abgabetermin: Montag, 26. Mai 2003 (in der Vorlesung)
41
Sommer-Semester 2003 — Magnetohydrodynamik
Übungsblatt Nr. 3,
Montag, 2. Juni 2003
Aufgabe 1: Strömung quer zum Magnetfeld (4 Punkte)
Zwischen zwei Platten im Abstand d (bei z = ±d/2) strömt eine Flüssigkeit der elektrischen Leitfähigkeit σ;
das Strömungsfeld hat die Form
v = (vx , 0, 0) ,
wobei vx (z) = v0 cos(zπ/d) .
Das Magnetfeld sei außerhalb der Platten (|z| ≥ d/2) homogen und senkrecht zu den beiden Platten, d.h. in
z-Richtung, und habe die Feldstärke B0 . Für das Feld im Zwischenraum hat man damit die Randbedingungen
Bx = 0 bei z = ±d/2. Suchen Sie eine stationäre Lösung (Bx (z), 0, Bz (z)) der Induktionsgleichung. Zeigen Sie
den Verlauf von Strömung und Magnetfeld in einer Skizze.
Aufgabe 2: Das Magnetfeld der Erde (3 Punkte)
Das Magnetfeld der Erde hat in grober Näherung die Form eines Dipols. Für ein solches Feld ist in Bereichen
geringer elektrischer Leitfähigkeit, z.B. im Erdmantel, die radiale Abhängigkeit der Feldstärke ∝ r−3 .
a) Mit Hilfe des Ihnen bekannten Radius des flüssigen Erdkerns und der Ihnen ebenfalls bekannten Feldstärke
an der Erdoberfläche sollen Sie eine Abschätzung der Feldstärke im Kern geben.
b) Zur Aufrechterhaltung des Dipolfeldes muss im Kern ein ringförmiger elektrischer Strom fließen. Schätzen
Sie dessen Stromstärke.
c) Der Kern besteht hauptsächlich aus flüssigem Eisen und Nickel, mit einer Leitfähigkeit von σ ≈ 5 ×
105 Ohm−1 m−1 . Wie lange könnte das Magnetfeld überleben, wenn im Kern v = 0 wäre?
Aufgabe 3: Eindringtiefe eines Wechselfeldes (3 Punkte)
Im Halbraum z > 0 befinde sich ein fester Leiter. An der Fläche z = 0 sei ein periodisches Feld der Form
B = B0 exp(−iωt), 0, 0
vorgegeben. Berechnen Sie das Magnetfeld im Gebiet z > 0. Wie groß ist die Eindringtiefe (Abnahme der
Amplitude auf 1/e) in Kupfer (σ = 5.7 × 107 Ohm−1 m−1 ) und Stahl (σ = 107 Ohm−1 m−1 ) für ein Wechselfeld
von 50 Hz?
Abgabetermin: Montag, 16. Juni 2003 (in der Vorlesung)
42
Sommer-Semester 2003 — Magnetohydrodynamik
Übungsblatt Nr. 4,
Montag, 23. Juni 2003
Aufgabe 1: Strömung quer zum Magnetfeld (3 Punkte)
Zwischen zwei Platten im Abstand d (bei z = ±d/2) strömt eine Flüssigkeit der elektrischen Leitfähigkeit σ;
das Strömungsfeld hat die Form
v = (vx , 0, 0) ,
wobei vx (z) = v0 cos(zπ/d) .
Das Magnetfeld sei außerhalb der Platten (|z| ≥ d/2) homogen und senkrecht zu den beiden Platten, d.h. in
z-Richtung, und habe die Feldstärke B0 . Für das Feld im Zwischenraum hat man damit die Randbedingungen
Bx = 0 bei z = ±d/2.
a) Die Differentialgleichungen für Bx und Bz hatten Sie schon das letzte Mal hergeleitet. Suchen Sie nun eine
stationäre Lösung (Bx (z), 0, Bz (z)).
b) Im 2-dimensionalen Fall (wie hier) kann man das Magnetfeld durch eine Fluss-Funktion ψ(x, z) darstellen,
so dass
Bx = −
∂ψ
,
∂z
Bz =
∂ψ
.
∂x
~ · B = 0 ist. Geben Sie ψ(x, z) für das Beispiel dieser Aufgabe an.
Vergewissern Sie sich, dass damit immer ∇
Zeigen Sie, dass durch ψ(x, z) = const. die Feldlinien von B gegeben sind, und skizzieren Sie den Verlauf von
Strömung und Magnetfeld.
Aufgabe 2: Eine statische dünne Flussröhre (4 Punkte)
Eine statische dünne Flussröhre wird in niedrigster Ordnung durch die Werte von Dichte ρ0 (z), Druck p0 (z)
und Magnetfeldstärke Bz0 (z) auf der Achse (r = 0) beschrieben. Die Flussröhre stehe senkrecht (in z-Richtung,
antiparallel zur Schwerkraft) und sei horizontal im magneto-hydrostatischen Gleichgewicht (mit g = const.) zu
einem gegebenen Außendruck pe (z).
a) Für den Fall, dass man es mit einem idealen Gas zu tun hat, die Temperatur T (z) und das Molekulargewicht
µ in der Röhre und außerhalb der Röhre dieselben sind, und sowohl innerhalb als auch außerhalb der Röhre
hydrostatisches Gleichgewicht herrscht, soll gezeigt werden, dass
Bz0 ∝ p1/2
e ,
rT ∝ pe−1/4 ,
wobei rT (z) der Radius der Flussröhre ist (Tip: Leiten Sie die Bedingung des magneto-hydrostatischen Gleichgewichts am Rand der Röhre nach z ab).
b) Für gegebenen Gesamtfluss Φ und gegebene Temperatur T (z) sollen die Funktionen p0 (z), Bz0 (z) und rT (z)
mit Hilfe von Integralen dargestellt werden.
bitte wenden
43
Aufgabe 3: Torsionswellen an einer dünnen Flussröhre (3 Punkte)
In einer dünnen Flussröhre betrachte man den Fall einer rein azimutalen Bewegung, d.h. vr = vz = 0 (in
Zylinderkoordinaten r, φ, z); außerdem sei g = 0, so dass ρ0 , p0 und Bz0 als konstant angenommen werden
dürfen.
a) Die Entwicklung der azimutalen Komponenten von Geschwindigkeit und Magnetfeld bis zur ersten Ordnung
in r ist
vφ = Ω0 (z, t) r ,
und Bφ = Bφ1 (z, t) r .
Warum gibt es für die beiden Variablen keinen Term ∝ r0 ?
b) Zeigen Sie, dass die Azimutalkomponenten von Bewegungs- und Induktionsgleichung (bei perfekter Leitfähigkeit) auf
ρ0 Ω̇0 =
Bz0 ′
Bφ1 ,
µ
Ḃφ1 = Bz0 Ω′0
führen. Ein Punkt bedeutet Zeitableitung, ein ′ Ableitung nach z. Zeigen Sie, dass periodische Lösungen existieren, die sich mit Alféngeschwindigkeit entlang der Flussröhre ausbreiten. Erklären Sie den Namen ,,Torsionswellen”.
Abgabetermin: Montag, 30. Juni 2003 (in der Vorlesung)
44
Sommer-Semester 2003 — Magnetohydrodynamik
Übungsblatt Nr. 5,
Montag, 7. Juli 2003
Aufgabe 1: Parker’s Dynamo-Welle (6 Punkte)
Die Induktionsgleichung für das mittlere Magnetfeld hBi lautet
∂
~ × (hvi × hBi + αhBi − η ∇
~ × hBi) .
hBi = ∇
∂t
Die Koeffizienten α und η seien konstant, die mittlere Geschwindigkeit sei gegeben durch hvi = (0, Ω0 z, 0), in
kartesischen Koordinaten (x, y, z), wobei Ω0 ebenfalls eine Konstante ist.
a) Machen Sie den Ansatz hBi = (0, B, ∂A/∂x), mit zwei Funktionen A und B, die nur von der Koordinate x
und der Zeit t abhängen, und zeigen Sie, dass A und B folgenden Gleichungen genügen (E. N. Parker, 1955):
Ȧ = αB + η∂ 2 A/∂x2 ,
Ḃ = Ω0 ∂A/∂x + η∂ 2 B/∂x2 .
Dabei ist die erste Gleichung schon einmal nach x integriert (mit der Integrationskonstanten 0); in der zweiten
Gleichung ist ein Term prop. α fortgelassen.
b) Suchen Sie für den Fall α < 0 und Ω0 > 0 Lösungen ∝ exp [i (ωt + kx)], mit positivem k, und finden Sie die
Dispersionsrelation, d.h. eine Beziehung zwischen ω und k. Lösen Sie diese Relation nach Real- und Imaginärteil
von ω auf.
c) Wie lautet die Bedingung dafür, dass das Magnetfeld nicht exponentiell gegen Null geht?
d) Der Realteil von ω stellt die Frequenz einer Welle mit der Wellenzahl k dar. In welcher Richtung läuft die
Welle? Können auch stehende Wellen auftreten?
e) Lokal kann man Kugelkoordinaten durch kartesische Koordinaten annähern. Wie muss das kartesische Koordinatensystem auf der Sonne positioniert werden, damit das als Welle fortschreitende mittlere Magnetfeld als
Erklärung des Schmetterlingsdiagramms der Sonnenflecken dienen kann? Welche Rollen spielen die Funktionen A und B und die Konstante Ω0 ? Unter welcher Bedingung ist das Fortlassen des α-Terms in der zweiten
Gleichung oben gerechtfertigt?
Aufgabe 2: Ein Dynamo mit kraftfreiem Feld (4 Punkte)
Bei einem kraftfreien mittleren Magnetfeld sind das Feld und die dazugehörende Stromdichte proportional, oder
auch:
~ × hBi = 1 hBi .
∇
L
a) Für den Fall hvi = 0 sei dieses Feld eine Lösung der obigen Induktionsgleichung (Aufg. 1). Welche Bedingung
muss L erfüllen, damit das Magnetfeld nicht exponentiell zerfällt?
b) Suchen Sie ein einfaches Beispiel für das kraftfreie Feld (denken Sie z.B. an eine Wendeltreppe) und geben
Sie für dieses Beispiel eine Deutung der Konstanten L.
Abgabetermin: Montag, 14. Juli 2003 (in der Vorlesung)
45
Inhaltsverzeichnis
1 Magnetische Erscheinungen auf der Sonne
1
2 Magnetohydrodynamik: Grundgleichungen
5
2.1
Vorbemerkungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.1.1
Bewegung einzelner Teilchen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.1.2
Bewegung vieler Teilchen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.1.3
MHD gemittelter Felder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.2
Magnetohydrodynamische Näherungen der Maxwell-Gleichungen . . . . . . . . . . . . . . . . . .
6
2.3
Masse- und Impulsbilanz, sowie Ohmsches Gesetz . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
2.3.1
Heuristische Herleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
2.3.2
Zweiflüssigkeitsmodell für kleine Geschwindigkeiten . . . . . . . . . . . . . . . . . . . . . .
8
2.3.3
Zweiflüssigkeitsmodell mit schleichender Diffusion . . . . . . . . . . . . . . . . . . . . . .
9
Bemerkungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
2.4.1
Der Drucktensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
2.4.2
~ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Die Kraftdichte ~j × B
2.4.3
Die neuen Terme im Ohmschen Gesetz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.4.4
Raumladung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4
2.5
2.6
Energie- und Zustandsgleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5.1
Magnetische Energiedichte: B 2 /2µ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5.2
Kinetische Energiedichte: ρv 2 /2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5.3
Innere oder thermische Energiedichte e . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5.4
Gesamtenergiebilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Zusammenstellung der Gleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3 Induktion
14
3.1
Induktionsgleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2
Der magnetische Fluss durch eine flüssige Linie: Das Konzept der eingefrorenen Magnetfelder . . 14
3.3
Dissipation von Magnetfeldern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.3.1
3.4
Magnetfeldkonzentration durch Strömungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.4.1
3.5
Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Kinematisches Beispiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Konvektiver Kollaps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
46
4 Dynamik dünner magnetischer Flussröhren
17
4.1
Waléngleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.2
Näherung dünner magnetischer Flussröhren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.3
4.2.1
Annahmen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.2.2
Formale Herleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Gebogene dünne magnetische Flussröhre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.3.1
Druckgleichgewicht der Röhre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.3.2
Lagrange-Koordinate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.3.3
Waléngleichung in der NdF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3.4
Bewegungsgleichung in der NdF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3.5
Energiegleichung: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.3.6
Anwendungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.4
Konvektiver Kollaps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.5
Magnetischer Auftrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.6
Dynamik penumbraler Flussröhren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5 Magnetische Rekonnektion
24
5.1
Rekonnektion an einem “X-type neutral point” . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.2
Modellierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
6 Die Dynamotheorie
26
6.1
Das Dynamoproblem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
6.2
Scheibendynamo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
6.2.1
Nichtlineare Wechselwirkung: Lorentzkraft . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.3
Bemerkungen über toroidale und poloidale Vektorfelder . . . . . . . . . . . . . . . . . . . . . . . 27
6.4
Induktion eines toroidalen Feldes durch differentielle Rotation ( Aufwickeln“) . . . . . . . . . . . 28
”
(Anti-) Dynamotheoreme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
6.5
6.5.1
Cowling’s Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
6.5.2
Toroidaltheorem (Elsasser’s Theorem) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
6.6
Turbulente Leitfähigkeit und α-Effekt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
6.7
Kinematische α2 , α2 Ω und αΩ Dynamos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6.7.1
6.8
αΩ-Dynamo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Dynamische Dynamos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
7 Übungen
38
47