3.5 Kraft auf magnetische Dipole in einem äusseren Magnetfeld
Werbung

144
3.5
KAPITEL 3. MAGNETOSTATIK
Kraft auf magnetische Dipole in einem äusseren
Magnetfeld
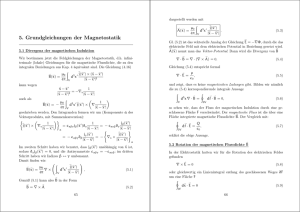
Abbildung 3.17: lokalisierte Stromverteilung im äusseren Magnetfeld
Es soll nun diskutiert werden, was für Kräfte und Drehmomente auf eine lokalisierte
~ wirken. Dabei soll die StromverteiStromverteilung ~j (~r) in einem äußeren Magnetfeld B
lung in einem engen Bereich um den Koordinatenursprung lokalisiert sein und die Ströme,
~ erzeugen sollen weit weg sein von der lokalisierten
die die magnetische Induktionsdichte B
Stromverteilung, auf die die Kraft ausgeübt wird (siehe Abb. 3.17). Demzufolge ändert
~ im Bereich der Stromverteilung nur wenig und wir können die magnetische Induksich B
tionsdichte für den Bereich, in dem die Stromdichte ~j von Null verschieden ist, in eine
Taylorreihe entwickeln. Für die kartesische Komponente Bk (der Index k steht für x, y
oder z) der magnetischen Induktionsdichte schreiben wir die Taylorentwicklung:
Bk (~r) = Bk (~0) +
~ r)
bzw. B(~
P3
d
l=1 dxl
Bk |~r=~0 xl + . . .
~ ~0) + ~r · ∇
~ B(
~ ~0) + . . .
= B(
(3.37)
In der ersten Zeile betrachten wir Ableitungen nach der kartesischen Koordinaten xl ,
wobei x1 für x, x2 für y und x3 für z steht. Nach dem ersten Ampereschen Gesetz gilt für
die Kraft F~ eines Magnetfeldes auf eine Stromverteilung (3.3):
Z
Z
Z
~
~ r ) d3 r
~
~
~
F = dF =
Idl × B = ~j(~r) × B(~
Z ~ ~0) + ~r · ∇
~ B(
~ ~0) + . . . d3 r
~j (~r) × B(
=
(3.38)
| {z } |
{z
}
a)
b)
Dabei haben wir in der 2. Zeile dieser Gleichung die Taylorentwicklung (3.37) für die
magnetische Induktionsdichte eingefügt. Betrachte die Terme a) und b) in (3.38) getrennt:
Z h
Z
i
3
~ ~0) d r = −B(
~ ~0) × ~j(~r) d3r = ~0
~j(~r) × B(
a) F~a) =
3.5. KRAFT AUF MAGNETISCHE DIPOLE...
145
da das Volumenintegral über ~j (~r) für lokale Stromverteilungen verschwindet (siehe (3.26).
Z h
i
~
~
~
~
~
b) Fb) =
j (~r) × ~r · ∇ B(0) dV
läßt sich mit Hilfe der folgenden Nebenrechnungen auswerten:
~ verursachen weit weg sind vom KoN.R.(1): Da die Ströme, die das Magnetfeld B
ordinatenursprung (siehe Voraussetzung, die wir zu Beginn dieses Abschnittes diskutiert
~ = 0. Damit ist auch
haben), gilt in der Nähe des Koordinatenursprunges rotB
~ ×B
~ = ~0.
~r × ∇
Mit dem Grassmannschen Entwicklungssatz (s. Glg. 3.14) ist also auch
"
#
~ B
~ B
~ ~ ·~r − ~r · ∇
=0
∇
| {z }
~
~
x=0
~
~
~
~ B
⇔
∇ B ·~r
= ~r · ∇
| {z }
Dabei bedeutet die Unterklammerung an, daß sich die Ableitungen im Nabla Operator
~ bezieht.
nur auf die betreffende Größe, also hier B
Also ist
#
Z "
~ B
~ ·~r
~j (~r) × ∇
F~b) =
d3 r .
| {z }
Das läßt sich nun mit der folgenden Nebenrechnung weiter vereinfachen:
N.R.(2):
Für die x–Komponente von F~b) gilt
[F~b) ]x
"Z (
)
#
~ B
~ ·~r
~j (~r) × ∇
=
d3 r
| {z }
x
)
Z (
~ ·~r
~ · ~r − jz ∂y B
=
jy ∂z B
d3 r
| {z }
| {z }
)
)
#
"Z (
Z ( 3
3
~ ·~r jy d r ,
~ ·~r jz d r −
∂z B
= −
∂y B
| {z }
| {z }
wobei ∂z als Abkürzung für die Ableitung d/dz stehen soll. Die vorstehende Gleichung
gilt für die y– und z–Komponente entsprechend.
Mit der Definition des Kreuzprodukts erhält man dann F~b) (~r) zu
Z ~ ×
~ ·~r ~j (~r) d3 r .
F~b) (~r) = − ∇
B
| {z }
146
KAPITEL 3. MAGNETOSTATIK
Mit der Vektoridentität (3.29)
Z
Z 1
3
~
(~a · ~r) j (~r) d r = − ~a ×
~r × ~j (~r) d3 r
2
R
und der Definition des magnetischen Momentes m
~ = 21 ~r 0 ×~j(~r 0 ) d3 r 0 ist dann schließlich
Z 1~
3
~
~
~
~
~
~r × j (~r) d r = ∇ × B(~x) × m
~ F (~r) = ∇
× B} ×
{z
|
~
x=~0
2
~ × (B
~ ×m
F~ = ∇
~)
Mit dem Grassmannschen Entwicklungssatz (s. Glg. 3.14) gilt
~ B
~ − (∇
~ · B)
~ m
~ B
~
F~ = (m
~ · ∇)
~ = (m
~ · ∇)
~ verschwindet). Da für stationäre, nahezu konstante B–Felder
~
(letzteres, da divB
(d.h.
~
keine Wirbel) rotB = 0 (⇒ ∂i Bl = ∂l Bi ) gilt und m
~ eine Konstante ist, gilt
~ l =
(m
~ · ∇)B
3
X
mi ∂i Bl =
i=1
3
X
i=1
~ m
~ .
⇒ F~ = ∇(
~ · B)
h
i
~ m
~
mi ∂l Bi = ∇(
~ · B)
l
F~ läßt sich also in der Form
~
F~ = −∇U
~
mit U = −~µ · B
als negativer Gradient eines Potenzials U schreiben. Genau so ist aber ein konservatives
Kraftfeld definiert. Seine potenzielle Energie lautet somit
~.
U = −m
~ ·B
(3.39)
Die Energie eines magnetischen Momentes m
~ ist also minimal, wenn m
~ parallel zur magnetischen Induktionsdichte ausgerichtet ist. Auf diesem Prinzip beruht der klassische
Magnetnadelkompass: Das magnetische Moment der Magnetnadel richtet sich parallel
zum Magnetfeld aus und minimiert so seine potenzielle Energie.
~ und m
Im allgemeinen sind B
~ nicht parallel. Auf die Stromverteilung, die durch das
~ welches
magnetische Dipolmoment m
~ beschrieben wird, wirkt also ein Drehmoment D,
im Folgenden berechnet werden soll: Allgemein gilt
Z
~ = ~r 0 × dF~ (~r 0 )
D
wo dF~ (~r 0 ) die Kraft auf ein Volumenelement bei ~r 0 ist. Mit dem Ampereschen Gesetz
(3.3) und dem Grassmannschen Entwicklungssatz (s. Glg. 3.14) ist dann
Z
h
i
0
0
0
~
~
~
D =
~r × j (~r ) × B(~r ) d3 r 0
Z h
Z h
i
i
0 ~
0 ~
0
3 0
~ r 0 ) d3 r 0 .
=
~r · B(~r ) j (~r ) d r −
~r 0~j(~r 0 ) B(~
3.5. KRAFT AUF MAGNETISCHE DIPOLE...
147
Betrachte zuerst den zweiten Summanden: Mit der Produktregel gilt
2~
2 ~
~
~
~ ~j = 2~r · ~j
∇ r j = ∇r j + r 2 ∇
(beachte: div~j = 0 in der Magnetostatik). Betrachtet man die Taylorentwicklung von
~ r 0 ) (3.37) nur bis zur ersten Ordnung (also B(~
~ r 0 ) = B(
~ ~0)), dann erhält man für den
B(~
zweiten Summanden mit dem Gaußschen Satz:
Z
Z h
i
1
0~
0
0
3
0
~ ~0) ∇
~ r 2~j d3 r 0
~ r ) d r = − B(
−
~r j (~r ) B(~
2
I
1~ ~
= − B(0) r 2~j (~r 0 )df~ 0 = 0
2
~ (mit der
(letzteres, da ~j (~r 0 ) an der Oberfläche des R3“ verschwindet). Damit gilt für D
”
Vektoridentität 3.29):
Z
Z 1
0
0
3
0
~ =
~ ~0) · ~r ~j (~r ) d r = −B(
~ ~0) ×
~r 0 × ~j (~r 0 ) d3 r 0 .
D
B(
2
R
Mit der Definition des Magnetischen Moments m
~ = 21 ~r × ~j d3 r Ist dann also
~ =m
~ ~0) .
D
~ × B(
(3.40)