Kapitel 3
Werbung

Kapitel 3
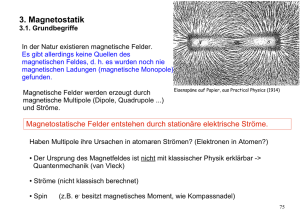
Magnetostatik
3.1
Problemstellung
~ =r
~ ⇥ A,
~ das von einer
In der Magnetostatik betrachten wir das Magnetfeld B
~
gegebenen zeitunabhängigen Stromverteilung j (~r) produziert wird. Die Feldlinien sind nach Konstruktion alle geschlossen und aufgrund des statischen Charakters der Ausgangssituation ist das Amperesche Gesetz hier
~ ⇥B
~ = µ0~j.
r
~ ·A
~ = 0. Wenn wir einsetzen und für die
Wir wählen die Coulombeichung r
Doppelrotation die Identität (1.15)verwenden, dann garantiert diese Eichbedingung dass
~ = µ0~j
A
(3.1)
das heißt dass die drei Komponenten des Vektorpotenzials automatisch auch
eine Poissongleichung erfüllen und uns das Arsenal der Lösungsmethoden für
Possoingleichungen, das wir in der Elektrostatik gelernt haben, zur Verfügung
steht. Bevor wir in Multipole einsteigen möchten wir aber wieder hochsymmetrische Fälle anschauen.
3.2
Langer gerader Draht
Als Beispiel wollen wir uns das Magnetfeld eines langen geraden Drahtes anschauen, also eine Stromverteilung (in Zylinderkoordinaten) von ~j = I0 (r)êz
wobei zu beachten ist, dass I0 die Dimension Strom/Länge hat. Die Rotation in
Zylinderkoordinaten ist
✓
◆
✓
◆
✓
◆
@B
@Br
@Bz
1 @
@Br
~ ⇥B
~ = 1 @Bz
r
êr +
ê +
(rB )
êz .
r @
@z
@z
@r
r @r
@
Um eine Rotation zu erhalten, die in z-Richtung zeigt und von r abhängt,
~ = B(r)ê , also ein sich tangenzial um den Draht schraubendes
setzen wir an B
37
Magnetfeld (rechte Hand Regel). Wir betrachten jetzt eine Kreisscheibe A =
{~r|z = z0 , r = r0 }. Wir wenden den Satz von Stokes auf diese Scheibe an und
finden
˛
ˆ
~
d~r · B = 2⇡r0 B (r0 ) = µ
d2 rI0 (r) = µ0 I0
@A
A
dies gibt uns sofort B = µ0 I0 /2⇡r.
3.3
Formale Lösung und Biot-Savart-Gesetz
Jetzt wollen wir explizit die Beziehung Gl. (3.1) nutzen. Die formale Lösung
lautet, wie in der Elektrostatik
ˆ
~j (~r0 )
~ = µ0
A
d3 r 0
.
(3.2)
4⇡
|~r ~r0 |
Daraus erhalten wir das Magnetfeld
ˆ
~ 0
~ =r
~ ⇥A
~ = µ0
~ ⇥ j (~r ) .
B
d3 r 0 r
4⇡
|~r ~r0 |
⇣ ⌘
~ ⇥ F~ = r
~ ⇥ F~ F~ ⇥ r
~ . Da hier Nabla
Wir nutzen die Nablaidentität r
nach ~r differenziert spielt nur der zweite Term eine Rolle und wir finden
ˆ
~r ~r0
~ = µ0
B
d3 r0 ~j (~r0 ) ⇥
3.
4⇡
|~r ~r0 |
Dies nennen wir das Biot-Savartsche-Gesetz.
Wir wenden dies auf einen geraden Linieleiter endlicher Länge an, also eine
Ladungsdichte ~j = I0 (r) ⇥ (L |z|) êz . Wir erhalten
ˆ
ˆ L
µ0 I0 L 0
rêr + (z z 0 ) êz
µ0 r
1
~
B=
dz êz ⇥ ⇣
dz 0 ⇣
⌘3/2 = 4⇡ ê
⌘3/2
4⇡
2
2
L
L
r2 + (z z 0 )
r2 + (z z 0 )
wobei wir bei der letzten Gleichung kurz inngehalten haben um uns davon zu
überzeugen, dass ê nicht von der Integrationsvariable abhängt. Damit können
wir integrieren
2
3
µ
L
z
L
+
z
0
~ =
5
B
ê 4 q
+q
4⇡r
2
2
2
2
r + (L z)
r + (L + z)
3.4
Magnetische Multipole
Wie in der Elektrostatik auch ist die Berechnung der Integrale im Biot-SavartGesetz bzw. im Vektorpotenzial sehr mühevoll. Wir greifen darum auf die Multipolentwicklung zurück.
38
3.4.1
Monopole?
Wir haben bereits gesehen, dass schon aufgrund der Vektorpotenzialstruktur
magnetische Feldlinien keinen Anfang oder Ende haben. Wir wollen jetzt mathematisch zeigen, dass dies der Abwesenheit von Monopolen des Magnetfeldes
äquivalent ist.
Die Monopolordnung des Vektorpotenzials Gl. (3.2) kann analog zur Elektrostatik (weit von der Ladungsverteilung) geschrieben werden
ˆ
~ 0 = µ0
A
d3 r0 ~j (~r0 ) .
(3.3)
4⇡r
Warum sollte dieses Integral im Allgemeinen verschwinden? Die Stromverteilung kann nicht vollkommen allgemein sein, im statischen Fall muss sie nach
~ · ~j = 0. Das riecht nach der
der Ladungserhaltung auch divergenzfrei sein r
Anwendung des Gaußschen Satzes, allerdings mit einem kleinen Umweg.
Wir benütigen ein Theorem für beliebige skalare Felder f und g mit dem wir
berechnen
ˆ
h
i ˆ
~ (~r) + f $ g = d3 r ~j · r
~ (f g)
J = d3 r f (~r) ~j (~r) · rg
wobei wir die Produktregel angewandt werden. Wir addieren eine nahrhafte
Null und wenden noch einmal die Produktregel an
ˆ
⇣
⌘ ˆ
⇣
⌘
~ (f g) + f g r
~ · ~j = d3 r r
~ · f g~j .
J = d3 r ~j · r
Jetzt können wir ausnutzen, dass wir über ein Volumen integrieren, das groß
genug ist so dass alle Ströme darin eingeschlossen sind und nichts hinein-oder
herausfließt. Das erlaubt die Anwendung des Gaußschen Satzes
ˆ
⇣
⌘
J=
d2 r f g n̂ · ~j = 0.
(3.4)
@V
Diese Identität, die wie gerade gesagt voraussetzt dass das Integrationsvo~ · ~j = 0 ist, werden wir jetzt mehrfach nutzen. Damit
lumen groß genug und r
können wir z.B. die x- Komponente von Gl. (3.3) vereinfachn, indem wir f = 1
und g = x setzen. Damit ist
ˆ
ˆ
3 ~
~
J = d r j · rx = d3 r jx = 0
(3.5)
Die anderen Komponenten können analog behandelt werden und wir ha~ 0 = 0. Die Monopolordnung der Multipolentwicklung für Magnetfelder
ben A
verschwindet.
39
3.4.2
Der magnetische Dipol
In weitere Analogie zur Multipolentwicklung in der Elektrostatik haben wir
ˆ
~ (1) = µ0
A
d3 r0 (êr · ~r0 ) ~j (~r0 ) .
4⇡r2
Wir nutzen eine neue Variante der Identität (3.4) um diesen Ausdruck zu
vereinfachen. Wir setzen f = ri und g = rj also zwei beliebige Komponenten
des Ortsvektors. Damit können wir zeigen
ˆ
J = d3 r0 ri0 jj + rj0 ji = 0.
(3.6)
Damit können wir für einen beliebigen Vektor ~a zeigen, dass
ˆ
X ˆ
Ka = ~a · d3 r0 ~r0 ji =
aj d3 r0 rj0 ji .
j
für
Wir teilen das Integral jetzt in zwei gleiche Hälften auf und nutzen Gl. (3.6)
ˆ
ˆ
⇣
⌘
1
1X
3 0
0
0
Ka =
a j d r r i j j rj j i =
d3 r0 ~r0 ⇥ ~j ⇥ ~a.
2 j
2
Wenn wir also ~a = ~r setzen erhalten wir für das Vektorpotenzial in der
statischen Dipolordnung den Ausdruck
~ ⇥ ~r
~ (1) = µ0 m
A
.
4⇡ r3
Hier ist das magnetische Dipolmoment gerade
ˆ
1
m
~ =
d3 r ~r ⇥ ~j (~r) .
2
(3.7)
Daraus ergibt sich als Feld
~ êr
~ (1) = µ0 3 (êr · m)
B
4⇡
r3
m
~
was ganz analog zum elektrischen Feld eines elektrischen Dipols ist.
Wir wollen eine gewisse Intuition für das Integral entwickeln. Dazu nehmen
wir an, dass wir einen Stromfaden haben, der in einer Ebene entlang eienr Kurve
parameterisiert als ~r(s) läuft. Es sei ~t der Tangenteinheitsvektor an die Kurve
an einem gegebenem Punkt das heißt das Differenzial entlang der Kurve ist
d~r = ~tds. Damit können wir lokal an jedem Ort das Differenzial aufteilen in
eine Integration senkrecht und eine parallel zum Draht
d3 r = df~·d~s = df ds.
40
In einem Stromfaden ist die senkrechte Integation einfach, sie überführt die
Stromdichte (Strom pro Fläche) in Stromstärke. Damit ist ~jd3 r = Id~r. Damit
lässt sich das magnetische Dipolmoment schreiben als
ˆ
I
~
m=
~
~r ⇥ d~r = I A
2
wobei wir ausgenutzt haben, dass das Integral entlang einer geschlossenen
ebenen Kurve gerade deren Fläche ergibt. Eine generelle Merkregel ist also, dass
magnetische Dipole Stromschleifen entsprechen.
Als Beispiel für diese Technik betrachten wir das Moment einer kreisförmigen
Stromschleife in der xy- Ebene um den Ursprung. Nach unserer Formel ist dieses
m
~ = ⇡r2 I.
Zu Fuß sieht das so aus: DIe Stromdichte ist
j (~r) =
Damit ist
ˆ
I
m
~ =
d3 r r (r
2R
I
(r
R
R) (cos ✓) ê .
I
R) (cos ✓) êr ⇥ê = R2
2
ˆ
d
(êr ⇥ ê )|✓=⇡/2 = I⇡R2 êz
in Übereinstimmung mit unserem obigen Ergebnis. Bei Integralen dieser Art
- räumliche Integrale über Vektoren in Kugelkoordinaten - ist immer darauf
zu achten, dass die Einheitsvektoren selbst koordinatenabhängig sind. Darum
sollte der Integrand am besten zuerst in kartesische Koordinaten umgeschrieben
werden.
Dies beendet unsere kurze Diskussion der Magnetostatik. Wir werden im
Kapitel über Materialien im elektromagnetischen Feld kurz auf Rand- und Anschlussbedingungen zurückkommen.
41