Energietechnik - Institut für Elektrische Energiewandlung
Werbung

Institut für Elektrische
Energiewandlung
Energietechnik
Teil: Elektrische Energiewandler
(Quelle: Siemens AG, Daimler-Benz AG, Kuka)
Ausgabe SS 2016
Prof. Dr.-Ing. habil. Dr. h.c. Andreas Binder
Energietechnik
0.1
Teil: Elektrische Energiewandler
Vorwort
Liebe Studentin! Lieber Student!
Das vorliegende Skript umfasst den Stoffumfang des Vorlesungsteils "Elektrische Energiewandler" der Vorlesung "Energietechnik". Da die Prüfung schriftlich ist, existiert neben den
in den Übungen vorgerechneten Beispielen zusätzliche eine Aufgabensammlung mit
ausgearbeiteten Beispielen. Dort finden Sie auch Kontrollfragen zur Selbstkontrolle, ob Sie
den Lehrinhalt verstanden haben. Der Stoff der Vorlesung ist so gegliedert, dass an die bereits
in den Vorlesungen "Grundlagen der Elektrotechnik" gebrachten Inhalte angeknüpft werden
kann. Im Text wird auf dieses Grundlagenwissen aus den Büchern
Clausert, H.; Wiesemann, G.; Stenzel, J.; Hinrichsen, V.: Grundgebiete der Elektrotechnik,
Bände 1 und 2, Oldenbourg-Verlag, 11. Aufl., 2011
zurückgegriffen. Deshalb sind diese Grundlagenkenntnisse für das Verstehen des
Vorlesungsinhalts unbedingt erforderlich. Zur Ihrem Service finden Sie im Anhang (Kap. 5)
wesentliche Teile des für diese Vorlesung erforderlichen Grundlagenwissens
zusammengefasst.
Nicht prüfungsrelevant:
- Mathematische Ableitungen (Die für die schriftliche Prüfung benötigten Formeln werden als
Formelsammlung zur Prüfung zur Verfügung gestellt).
- Kapitel 4.6
Das Stoffgebiet ist so dargestellt, dass für alle Studentinnen und Studenten der BachelorStudiengänge "Elektrotechnik und Informationstechnik", „Mechatronik“ und „WI-ET
Vertiefung Energietechnik“ ein Überblick über gängige Prinzipien und Technologien der
elektrischen Energiewandlung geboten wird. Zur weiteren Vertiefung wird in diesen
Bachelor-Studiengängen die Vorlesung "Elektrische Maschinen und Antriebe" angeboten. In
den entsprechenden Master-Studiengängen finden Sie dann die Lehrveranstaltungen „Energy
Converters – CAD and System Dynamics“, "Motorenentwicklung für die Antriebstechnik",
"Großgeneratoren und Hochleistungsantriebe", "Kleinmotoren", "Neue Technologien bei
elektrischen Energiewandlern“, „Praxisorientierte Projektierung elektrischer Antriebe (EAuto)“ (Projektseminar), ein Seminar zur numerischen Feldberechnung in elektrischen
Maschinen sowie begleitende Praktika.
Sollten Sie Fragen, Wünsche oder Anregungen haben, wenden Sie sich bitte an meine
Assistenten oder direkt an mich. Ich wünsche weiterhin guten Erfolg bei Ihrem Studium und
gutes Gelingen bei der Prüfung zur Vorlesung "Energietechnik".
Prof. Dr.-Ing. habil. Dr. h. c. Andreas Binder
TU Darmstadt
Darmstadt, im März 2016
Institut für Elektrische Energiewandlung
Energietechnik
0.2
Teil: Elektrische Energiewandler
Inhaltsverzeichnis zu „Energietechnik“ - Teil: Elektrische Energiewandler
Seite
1. Elektrische Energiewandlung - Einführung
1.1 Grundsätzliche Einteilung elektrischer Energiewandler
1.2 Elektrische und magnetische Energiewandlung
1.3 Beispiel eines einfachen elektromechanischen Energiewandlers
1.4 Zählpfeilsysteme
1.1
1.1
1.2
1.4
1.5
2. Transformatoren
2.1 Funktionsprinzip des Einphasentransformators
2.2 Der Einphasentransformator bei Sinusspannungen
2.3 Bauformen von Einphasen-Transformatoren
2.4 Drehstromtransformatoren
2.5 Schaltungsvarianten von Drehstromtransformatoren
2.6 Leistungsschildangaben bei Drehstromtransformatoren
2.1
2.2
2.5
2.10
2.11
2.14
2.16
3. Gleichstrommaschinen
3.1 Funktionsweise der Gleichstrommaschine
3.2 Ankerwicklung
3.3 Ankerstrom und elektromagnetisches Drehmoment
3.4 Elektromechanische Energiewandlung in der Gleichstrommaschine
3.5 Der fremderregte Gleichstrommotor und der Nebenschluss-Motor
3.6 Wechselstrom-Kommutatormaschinen
3.1
3.1
3.7
3.9
3.11
3.12
3.17
4. Drehfeldmaschinen
4.1 Prinzipielle Erzeugung eines magnetischen Drehfelds
4.2 Technische Erzeugung eines magnetischen Drehfelds
4.3 Drehfrequenz des Drehfelds
4.4 Asynchronmaschinen
4.4.1 Aufbau von Asynchronmaschinen
4.4.2 Funktionsweise von Asynchronmaschinen
4.4.3 Ersatzschaltbild der Asynchronmaschine
4.4.4 Stromaufnahme der Asynchronmaschine
4.4.5 Leistungsbilanz und Drehmoment der Asynchronmaschine
4.4.6 Drehmoment-Drehzahl-Kennlinie der Asynchronmaschine
4.5 Synchronmaschinen
4.5.1 Aufbau und Funktionsweise von Synchronmaschinen
4.5.2 Ersatzschaltbild und Zeigerdiagramm der Synchronmaschine
4.5.3 Generator- und Motorbetrieb -Bedeutung des Polradwinkels
4.5.4 Drehmoment, Wirk- und Blindleistung der Synchronmaschine
4.6 Turbinen als Synchrongeneratorantriebe (Übersicht) (kein Prüfungsstoff!)
4.1
4.1
4.2
4.7
4.8
4.9
4.10
4.11
4.13
4.14
4.15
4.17
4.17
4.21
4.23
4.24
4.26
5. Anhang: Repetitorium:
Grundgesetze der Mechanik, Elektromagnetik und Drehstromtechnik
5.1
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
0.3
Teil: Elektrische Energiewandler
Grundlegende und weiterführende Literatur
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
Fischer, R.: Elektrische Maschinen, 12. Auflage, Hanser Verlag, München, 2004
Bödefeld, Th.; Sequenz, H.: Elektrische Maschinen. Eine Einführung in die Grundlagen, SpringerVerlag, Wien, 1971
Prechtl, A.: Vorlesungen über die Grundlagen der Elektrotechnik, Springer-Verlag, Wien, Band 1:
1994, Band 2: 1995,
Clausert, H.; Wiesemann, G.; Stenzel, J.; Hinrichsen, V.: Grundgebiete der Elektrotechnik, Bände 1 und
2, Oldenbourg-Verlag, 11. Aufl., 2011
Albach, M.: Grundlagen der Elektrotechnik 1 + 2, Pearson Studium, München, 2004
Bohn, T.: Elektrische Energietechnik, Handbuchreihe Energie, 4. Bd., Verlag TÜV Rheinland, 1987
Brosch, P.: Moderne Stromrichterantriebe – Leistungselektronik und Maschinen, Vogel-Verlag, 3.
Auflage 1998
Falk, K.: Der Drehstrommotor – Ein Lexikon für die Praxis, VDE-Verlag GmbH, Berlin-Offenbach,
1997
Hindmarsh, J.; Renfrew; A.: Electrical Machines and Drive Systems, Newnes, Oxford, 3rd ed., 2002
Fitzgerald, A.E.; Kingsley, Ch.; Umans, S.D.: Electrical Machinery, McCraw-Hill, New York, 6th ed.,
2003
Justus, O.: Dynamisches Verhalten elektrischer Maschinen – Eine Einführung in die numerische
Modellierung mit PSPICE, Vieweg, Braunschweig/Wiesbaden, 1993
Spring, E.: Elektrische Maschinen – eine Einführung, Springer, Berlin 1998
Hofmann, W.: Elektrische Maschinen, Pearson, München 2013
Kleinrath, H.: Grundlagen elektrischer Maschinen, Akademische Verlagsgesellschaft, Wiesbaden, 1975
Schreiner, J.: Physik 1 und 2, Hölder-Pichler-Tempsky, Wien, 1968 und 1971
Das griechische Alphabet
Α α Alpha
Β β Beta
Γγ
Gamma
Δδ
Delta
Εε
Epsilon
Ζζ
Zeta
Ηη
Eta
Θϑ
Theta
Ιι
Jota
Κκ
Kappa
Λλ
Lambda
Μμ
My (mue)
Νν
Ny (nue)
Ξξ
Xi
Οο
Omikron
Ππ
Pi
Ρρ
Rho
Σσ
Sigma
Ττ
Tau
Υυ
Ypsilon
Φϕ
Phi
Χχ
Chi
Ψψ
Psi
Ωω
Omega
Verwendete wichtige Formelzeichen
a
Anzahl paralleler Wicklungszweige bei Drehfeldmaschinen, aber:
HALBE Anzahl paralleler Wicklungszweige bei Gleichstrommaschinen
A
m2
Fläche
B
T
magnetische Induktion (Flussdichte) (1 T = 1 Tesla = 1Vs/m2)
m
Bohrungsdurchmesser
dsi
E
V/m elektrische Feldstärke
f
Hz
elektrische Frequenz (1 Hz = 1 Hertz = 1/s)
F
N
Kraft
H
A/m magnetische Feldstärke
I
A
elektrische Stromstärke
j
imaginäre Einheit − 1
2
J
kgm Trägheitsmoment
J
T
magnetische Polarisation
k
Maschinenkonstante
K
Anzahl der Kommutatorsegmente
l
m
(axiale) Länge
L
H
Selbstinduktivität (1 H = 1 Henry = 1 Vs/A)
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
m
m
M
M
Mb
Mp0
M1
n
N
Nc
p
r
P
q
Q
Q
R
s
s
S
t
T
u
U
Up
ü
v
W
x
X, Xd
z
kg
H
Nm
Nm
Nm
Nm
1/s
m
W
VAr
Ω
m
VA
s
s
V
V
m/s
J
m
Ω
α
rad
αe
γ
rad
γ
kg/m3
δ
m
ε As/(Vm)
ϕ
rad
Φ
Wb
Ψ
Vs
Λ
Vs/A
μ Vs/(Am)
μ0 Vs/(Am)
η
ϑ
rad
Θ
A
κ
S/m
σ
τp, τQ m
ω
1/s
TU Darmstadt
0.4
Teil: Elektrische Energiewandler
Masse
Strangzahl
Gegeninduktivität
Drehmoment
asynchrones Kippmoment
synchrones statisches Kippmoment
asynchrones Anfahrmoment
Drehzahl
Windungszahl je Strang
Spulenwindungszahl
Polpaarzahl
Radius
Leistung (1 W = 1 Watt = 1 V.A)
Lochzahl (Nuten pro Pol und Strang)
Blindleistung (1 VAr = 1 VA reaktiv)
Nutenzahl
elektrischer Widerstand (1Ω =1 Ohm = 1V/A)
Schlupf
Weglänge
Scheinleistung
Zeit
Schwingungsperiodendauer
Spulenseiten je Nut und Schicht
elektrische Spannung
Polradspannung
Übersetzungsverhältnis
Geschwindigkeit
Energie
Umfangskoordinate
Reaktanz, synchrone Reaktanz
gesamte Leiterzahl
Zündwinkel
äquivalente Polbedeckung
Drehwinkel
Massendichte
Luftspalt
Dielektrizitätskonstante
Phasenwinkel
magnetischer Fluss (1 Wb = 1 Weber = 1 Vs)
magnetische Flussverkettung
magnetischer Leitwert
magnetische Permeabilität
magnetische Permeabilität des Vakuums (4π.10-7 Vs/(Am))
Wirkungsgrad
Polradwinkel (elektrische Gradezählung)
elektrische Durchflutung
elektrische Leitfähigkeit (1 S = 1 „Siemens“ = 1 A/V)
Streuziffer
Polteilung, Nutteilung
elektrische Kreisfrequenz
Institut für Elektrische Energiewandlung
Energietechnik
Ωm
1/s
0.5
Teil: Elektrische Energiewandler
mechanische Winkelgeschwindigkeit
Indizes
a
Anker
av
Mittelwert
b
Bürste, Blindkomponente
B
Beschleunigung
c
Spule
Cu
Kupfer
d
direct (längs), dc (Gleichgröße), Verluste (dissipation)
e
elektrisch bzw. äquivalent
f
Feld
Fe
Eisen
Ft
Wirbelstrom (Foucault)
G
Gate
h
Haupthys
Hysterese
i
induziert bzw. innere
in
zugeführt
k
Kurzschlussm
Magnetisierungs-, magnetisch bzw. mechanisch bzw. maximal
max maximal
N
Nennout
abgegeben
p
Pol bzw. Polrad
r
Rotor
s
Stator, shaft (Welle)
syn
Synchron
T
Temperatur
U,V,W Bezeichnung der Wicklungsstränge im Dreiphasen-System
verk verkettet
w
Wirkkomponente
δ
Luftspalt
σ
Streu0
Leerlauf
1
Anfahrpunkt (Schlupf s = 1 bei Asynchronmaschine)
1, 2 primär, sekundär (beim Transformator)
Notationen
i
Kleinbuchstabe: z. B.: elektrische Stromstärke, Augenblickswert
I
Großbuchstabe: z. B.: elektrische Stromstärke, Effektivwert oder Gleichstrom-Wert
I
unterstrichen: komplexe Größen
ˆI
Spitzenwert, Amplitude
I′
auf Ständerwicklungsdaten mit ü umgerechnet
Re(.) Realteil von ..., Im(.) Imaginärteil von ...
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
1.1
Teil: Elektrische Energiewandler
1. Elektrische Energiewandler - Einführung
Elektrische Energietechnik ist eine Teildisziplin der Energietechnik, die sich wiederum mit
der Bereitstellung, Umwandlung, dem Transport und der Nutzung unterschiedlicher Formen
der Energie wie Wärmenergie, kinetische und potentielle Energie, chemische, bio-chemische
und elektrische Energie befasst. Um ein „Gefühl“ für den Wert von Energie zu bekommen,
betrachten wir folgendes Beispiel 1-1.
Beispiel 1-1:
Welchen Nutzen haben wir von 1 kWh Energie?
PKW (Benzinmotor, Mittelklasse):
1.2 km Fahrtstrecke
LKW:
0.2 km Fahrtstrecke
Mensch zu Fuß (Läufer):
10.0 km Wegstrecke
PC-Arbeit:
5h
Warm duschen:
5 Minuten
60°C-Wäsche, Waschmaschine A+
5 kg Wäsche waschen
Internet-Surfen:
100 Google-Suchanfragen
Elektrische Energietechnik befasst sich dabei speziell mit der Bereitstellung elektrischer
Energie, ihrer Umwandlung, dem Transport und ihrer Nutzung für Fortbewegung, in
Arbeitsmaschinen, zur Wärmenutzung, Informationsübertragung, um einige wesentliche
Anwendungen zu nennen. Ihre Nutzung in allen Arten elektrischer Geräte für die Sektoren
Haushalt, Industrie, Verkehr umfasst u. a. Messtechnik, Medizintechnik, Infotainment,
Computertechnik und Datenverarbeitung, Nachrichtenübermittlung, Antriebstechnik, aber
auch Anwendungen bei der Bereitstellung der elektrischen Energie selbst in der
Kraftwerkstechnik, den Schaltanlagen und Übertragungs- und Verteilnetzen. Elektrische
Energietechnik wird als eine der wichtigen Schlüsseltechnologien der Zukunft bezeichnet,
denn elektrische Energie
- ist nahezu universell einsetzbar,
- hat noch ungehobenes Nutzungspotential,
- ist eine der Säulen unseres Wohlstands,
- ist aus unserem Leben nicht mehr wegzudenken,
- nimmt deshalb weltweit an Bedeutung zu.
Wie wichtig die elektrische Energietechnik für den weltweiten Wohlstand ist, merken wir am
deutlichsten, wenn sie ungewollt nicht vorhanden ist, wie bei den gefürchteten
Stromnetzausfällen („Blackout“) infolge von Fehlern in dem elektrischen
Energieversorgungssystem, wie folgendes Beispiel zeigt.
Beispiel 1-2:
Blackout New York, USA, 14.8.2003: 50 Millionen Menschen im NO der USA für mehrere
Stunden ohne elektrische Stromversorgung, wirtschaftlicher Schaden lt. Wall Street Journal
geschätzt 6 Milliarden US-Dollar.
Deshalb ist die Verfügbarkeit der elektrischen Energie für unsere moderne industrialisierte
Gesellschaft von großer Bedeutung. Als nach den Gesetzen der Statistik ermittelte Maßzahl
wird dafür häufig die "Nichtverfügbarkeit elektrischer Energie je Einwohner und Jahr“
ermittelt.
Beispiel 1-3:
Nichtverfügbarkeit ausgewählter Länder:
Deutschland, 2011:
15 Minuten / (Einwohner · Jahr)
Großbritannien, 2006:
89 Minuten / (Einwohner · Jahr)
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
Spanien, 2007:
USA, 2012:
1.2
Teil: Elektrische Energiewandler
105 Minuten/ (Einwohner · Jahr)
154 Minuten / (Einwohner · Jahr)
Die angegebenen Werte schwanken von Jahr zu Jahr zumeist nur geringfügig und zeigen, dass
das hoch technisierte Land Deutschland weltweit einen der höchsten Werte der Verfügbarkeit
elektrischer Energie hat. Wenn über elektrische Energie und Klimawandel gesprochen wird,
denken viele an die Erzeugung elektrischer Energie in den Kraftwerken. Tatsächlich umfasst
die Thematik der elektrischen Energietechnik eine „Energiekette“ von der Erzeugung über
die Verteilung hin zur Nutzung der elektrischen Energie inklusive möglicher Speicherung
mit den dabei auftretenden energetischen Verlusten (meist in Form von Wärme) und über ihre
Verfügbarkeit und die dafür entstehenden Kosten und verrechneten Preise ihren Einfluss auf
unseren Wohlstand.
Weiter müssen wir bedenken, dass bei der Energienutzung auch jene Energiemenge zu
betrachten ist, die wir bei der Nutzung von Geräten aller Art stillschweigend mit in Anspruch
nehmen, und die als „Graue“ Energie eines Geräts (Produkts) bezeichnet wird. Es ist dies
die Energie für die Herstellung, den Transport und das spätere Recycling oder die Entsorgung
eines von uns genutzten Geräts. Diese Energie ist nicht notwendig eine elektrische
Energieform, aber der Anteil an elektrischer Energie an der „grauen“ Energie nimmt mit der
steigenden Nutzung der elektrischen Energie zu.
Beispiel 1-4:
Graue Energie einiger von uns häufig genutzter Geräte:
Personal Computer:
4 000 kWh
PKW (Mittelklassewagen):
60 000 kWh
1 kg Bohnen (Import N-Afrika):
10 kWh (durch Transportenergie)
1 kg Bohnen (Inland):
1 kWh
Wesentlich für die Nutzung der Energie (auch der elektrischen Energie) ist der
Umwandlungswirkungsgrad von einer in eine andere Energieform, oder bei beibehaltener
Energieform von einem Energiesystem in ein anderes (z. B. vom Wechselstromsystem zum
Gleichstromsystem durch Gleichrichtung). Dazu wird die je Zeiteinheit t genutzte Energie W
als Leistung P = W/t betrachtet. Dieser Wirkungsgrad der Energieumwandlung
η = Pab / Pzu ist das Verhältnis aus abgegebener Leistung Pab der Energieform 2 und
zugeführter Leistung Pzu der Energieform 1.
Beispiel 1-5:
11-kW-Elektromotor (Asynchronmaschine, siehe Kapitel 4 des Teils „Elektrische
Energiewandler“) mit dem Wirkungsgrad 88%: Die Nennleistung 11 kW ist bei E-Motoren
(außer bei Kleinmotoren z.B. in Haushaltsgeräten) stets die mechanisch abgegebene Leistung.
Es erfolgt im E-Motor eine Umwandlung von elektrischer in kinetische Energie als eine Form
der „mechanischen“ Energie. Die zugeführte Leistung ist Pin = Pout/η = 11/0.88 = 12.5 kW.
Die dabei auftretende Verlustleistung ist Pin – Pout = 12.5 – 11.0 = 1.5 kW und wird in Form
von Wärmeenergie an die Umgebungsluft abgegeben.
Die Verlustenergie ist also zumeist Wärmeenergie (auch thermische Energie genannt). Aber
auch die Nutzenergie selbst wird häufig bei der Nutzung in Wärmenergie umgewandelt, so
dass wir (ungewollt) bei fast jeder Form der Energienutzung Wärmeenergie erzeugen, und
damit unseren Planeten erwärmen, wie folgendes Beispiel zeigt.
Beispiel 1-6:
Der 11-kW-Elektromotor aus Bsp. 1-5 wird als Pumpenantrieb für die Bewegung von Wasser
(z. B. Abwasserreinigung) verwendet. Die Wirkungsgrade sind für den Motor 88% und die
Kreiselpumpe 80%. Die Verlustleistung im Motor ist gemäß Bsp. 1-5 1.5 kW und die der
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
1.3
Teil: Elektrische Energiewandler
Pumpe mit gleicher Rechenmethode 2.2 kW. Es werden daher dem elektrischen Netz 12.5 kW
elektrische Leistung entnommen und dem Wasser 8.8 kW mechanische Strömungsleistung
zugeführt (Bild 1). Bei gleichmäßig strömendem Wasser z. B. in Rohrleitungen wird diese
Leistung benötigt, um gegen die bremsenden Reibungskräfte im strömenden Wasser dieses in
Bewegung zu halten. Somit werden auch die 8.8 kW in Wärmeleistung umgewandelt. Bei
einer Betriebszeit von einem Jahr „rund um die Uhr“ (1 Jahr = 8760 Stunden) beträgt alleine
die Verlustenergie im Elektromotor W = 1.5 x 8760 = 13140 kWh, während die gesamte in
Wärme umgesetzte Energie W = 12.5 x 8760 = 109 500 kWh beträgt. Mit dieser Energie
könnte man gemäß Bsp. 1-1 mit einem PKW 131 400 km zurücklegen, also mehr als 3-mal
den Erdball umrunden.
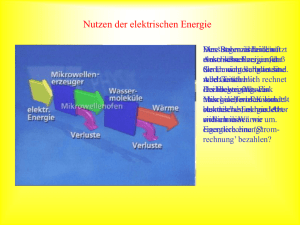
Bild 1: Leistungskette eines elektrischen Pumpenantriebs zur Bewegung von Wasser
Für die Bereitstellung der elektrischen Energie an unseren Steckdosen tritt die bereits
erwähnte Energiekette in Aktion, die in Bild 2 schematisch dargestellt ist.
Bild 2: Energiekette für die elektrische Energie von den Klemmen des elektrischen Generators zur Steckdose
beim Endverbraucher (Quelle: Siemens AG)
Im thermischen Kraftwerk links in Bild 2 mit
- dem Kessel zur Erzeugung von Wasserdampf durch Erhitzung des Wassers mit der
Verbrennungswärme von z. B. Kohle,
- dem Schlot zur Abfuhr der Rauchgase der verbrannten Kohle und
- dem Kühlturm zur Rückkühlung des Wasserdampfs im Dampfkreislauf
findet der Antrieb eines elektrischen Synchrongenerators (Kapitel 4) mit z. B 3000/min durch
eine vom heißen, expandierenden und sich dabei abkühlenden Dampf angetriebene
Dampfturbine (Kapitel 4) statt. Für eine elektrische Leistung von z. B. PG = 1000 MW muss
thermisch über die Verbrennungsenergie eine Leistung von 1000/0.45 = 2222 MW
bereitgestellt werden. Die Verlustleistung (2222 – 1000 = 1222 MW) wird über den Kühlturm
abgeführt, um den Dampf wieder zu Wasser zu kondensieren und den thermischen
Dampfkreislauf wieder von vorne zu beginnen (siehe Teil III, Fr. Prof. Hanson). Mit einer
Leistung von PG = 1000 MW bei einer elektrischen dreiphasigen Generatorspannung von UG
= 27 kV (verkettet), die bei einem zweipoligen Generator bei 3000/min die Frequenz f = 50
Hz hat, und einem vom Generator eingestellten kapazitiven Leistungsfaktor cosϕ = -0.8 (auch
als cosϕ = 0.8 übererregt bezeichnet) wird die elektrische Scheinleistung
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
1.4
Teil: Elektrische Energiewandler
SG = PG / cos ϕ = 1000 / 0.8 = 1250MVA über die Hochspannungsfreileitung in Bildmitte (UL
= 400 kV verkettet) zu den Verbraucherzentren übertragen. Es muss daher im
Blocktransformator, ausgelegt für 1250 MVA (Wirkungsgrad mit 99.5% nahezu „Eins“,
Kapitel 2), die Generatorspannung auf 400 kV hochgespannt werden. Dann sinkt der Strom je
„Phase“ (d.h. je Leiter des Dreileiter-Drehstromsystems) vom Generatorstrom
I G = SG /( 3U G ) = 1250 /( 3 ⋅ 27) = 26.73kA
bei vernachlässigter Transformatorverlustleistung auf den kleineren Wert
I L = SG /( 3U L ) = 1250 /( 3 ⋅ 400) = 1.8kA ,
um die Stromwärmeverluste in der Freileitung (~ I L2 ) klein zu halten. Bei z. B. fünfzehn
Verbraucherzentren mit einem Leistungsbedarf von je 83.3 MVA wird der elektrische
Leistungsfluss in den Umspannwerken und Schaltanlagen (Bildmitte) aufgeteilt. Die weitere
Übertragung kann dann bei etwa 1-fach kleinerer Spannung UV = 30 kV und etwa gleichem
Leiterstrom erfolgen: IV = ( SG / 15) /( 3UV ) = 83.3 /( 3 ⋅ 30) = 1.6kA . Diese Leistung 83.3
MVA wird über zahlreiche Verteiltransformatorstationen (Bild rechts) auf die für Haushalte
oder Industrie- und Gewerbebetriebe typischen Leistungsgrößen aufgeteilt, wobei die
Spannung weiter abgesenkt werden kann, z. B. auf UE = 400 V. Bei z. B. SE = 500 kVA
Endnutzerleistung je Verteiltransformator erhalten wir
I E = S E /( 3U E ) = 500000 /( 3 ⋅ 400) = 722A .
Diese Leistung SE kann nun z. B. genutzt werden, um die o.g. E-Motoren (AC-Motoren, Kap.
4, oder bei Gleichrichtung DC-Motoren, Kap.3) zu versorgen, die jene mechanische Arbeit
verrichten, die in der Antike zum großen Teil durch menschliche oder tierische Muskelkraft
geleistet worden ist (vgl. Beispiel 1-7). Tatsächlich beträgt der Wirkungsgrad von der
Generatorklemme zur Steckdose etwa 85%, so dass von den 1000 MW nur etwa 850 MW
genutzt werden können.
Damit kommen wir zum didaktischen Konzept dieser Ringvorlesung:
Aus der oben geschilderten Energiekette werden im
Teil I (Elektrische Energiewandler, Prof. Binder) die Komponenten Transformator, DC- und
AC-Generatoren/Motoren und im Überblick die Turbinen behandelt, im
Teil II (Stromrichtertechnik, Prof. Griepentrog) die leistungselektronischen Schalter und die
daraus gebauten Komponenten Gleichstromsteller, Gleichrichter und Umrichter und im
Teil III (Elektrische Energieversorgung, Prof. Hanson) die Teilsysteme der elektrischen
Netze, der Kraftwerkstypen sowie Aspekte der Energiewirtschaft.
So erhalten Sie einen Überblick über die elektrische Energietechnik auf dem Weg von der
Komponente zum System, wobei für das Verständnis der Komponenten im Kap. 5 die
relevanten Grundlagen der Elektrotechnik zur Ihrem Nutzen knapp zusammenfassend
dargestellt sind.
Abschließend wollen wir uns den Nutzen der elektrischen Energietechnik an einem plakativen
Beispiel nochmals veranschaulichen.
Beispiel 1-7:
Im antiken Rom um 100 n. Chr. lebten etwa 20 Mio. römische Bürger und 120 Mio.
dienstbare Völker und Sklaven. Das ergibt, wenn wir alle Nichtbürger vereinfachend als
Sklaven bezeichnen, 6 Sklaven je römischer/-m Bürger/-in. Wenn nun jeder Sklave/Sklavin
im Mittel etwa 1/10 der Arbeitsleistung eines Pferds zu leisten vermag, als 1/10 PS = 75 W,
und das 8 Arbeitsstunden je Tag an ca. 360 Tage pro Jahr, so ergibt das 216 kWh pro Jahr.
Jedem römischem Bürger/-in standen damit 6·216 kWh = 1296 kWh pro Jahr zur Verfügung,
das sind 4680 MJ pro Jahr.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
1.5
Teil: Elektrische Energiewandler
Im Land Deutschland um 2012 n. Chr. wurden an Primärenergie 3763 TWh eingesetzt. Das
sind alle genutzten Energieformen, nicht nur die elektrische Energie. Je Einwohner/-in sind
das 3763 TWh/81.8 Mio. = 46.0 MWh. Bezogen auf das antike Rom entspricht das der
Arbeitsleistung von 213 Sklaven, nämlich 213 = 46.0 MWh / 216 kWh.
Fazit:
In Deutschland hat jeder von uns im Mittel ständig 213 „Energiesklaven“ in der Form der für
uns bereits gestellten Energie zur Verfügung. Diesen hohen Energieumsatz pro Kopf sollten
wir bedenken, und daraus für unser persönliches Verhalten entsprechende Schlüsse ziehen.
1.1 Grundsätzliche Einteilung elektrischer Energiewandler
Elektrische Energiewandler formen elektrische Energie um, wobei unterschiedliche Typen
von Wandlern bekannt sind.
- Elektrische Energie wird wieder in elektrische Energie umgewandelt durch
Transformatoren, DC-DC-Wandler, Schaltnetzteile, etc.
- Mechanische Energie wird in elektrische Energie umgewandelt (und umgekehrt) durch
die elektromechanischen Energiewandler (elektrische Maschinen, elektromagnetische
Aktoren wie z.B. Antriebe für Stellventile), etc. Es werden rotierende und linear
bewegende Ausführungsformen unterschieden.
- Chemische Energie (Bindungsenergie in Molekülen) wird in elektrische Energie und
umgekehrt durch Batterien, Brennstoffzellen etc. umgewandelt.
- Licht (elektromagnetische Welle!) wird in elektrische Energie (und umgekehrt) durch
Photozellen, Leuchtdioden, etc. umgewandelt.
- Kernenergie wird direkt in elektrische Energie in Radionuklidbatterien umgewandelt.
- Strömungsenergie (mechanische Energie in strömenden Medien wie z. B. elektrisch
leitfähige Gase) wird direkt in elektrische Energie in magnetohydrodynamischen Wandlern
umgeformt (z. B. Satellitenpositionierantrieb).
Beispiel 1.1-1:
Elektromotor (Bild 1.1a)
Der Elektromotor ist ein rotatorischer elektromechanischer Energiewandler, der elektrische
Energie aus dem elektrischen Netz entnimmt und in mechanische Energie umformt. Diese
Energie wird zum Antrieb einer mechanischen Arbeitsmaschine, z. B. einer mit dem
Elektromotor gekuppelten Pumpe, die Grundwasser hoch pumpt, benötigt. Die Drehzahl des
rotierenden Läufers (Rotors) des Elektromotors nM ist die Anzahl der Umdrehungen des
Motorläufers je Zeiteinheit (z. B. 1500 Umdrehungen je Minute, nM = 1500/min). Sie ist bei
direkter ("starrer") Kupplung mit der Arbeitsmaschine auch die Drehzahl nA dieser
Arbeitsmaschine (siehe Formelzeichen-Übersicht).
Beispiel 1.1-2:
Linearmotor (Bild 1.1b)
Linear bewegende Elektromotoren (Linearmaschinen) sind durch die Geschwindigkeit vM
ihres bewegten Sekundärteils gekennzeichnet, die in der Regel auch die Geschwindigkeit vA
der angetriebenen Arbeitsmaschine ist. Linearmaschinen werden z. B.
- in Werkzeugmaschinen verwendet, wo der Schlitten mit dem Drehmeißel bewegt wird,
- bei Flugzeugkatapulten,
- bei Hochgeschwindigkeitszügen im Verbund mit magnetischem Schweben (z. B.
YAMANASHI-Projekt in Japan mit vM = 550 km/h Geschwindigkeit) u. ä.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
1.6
a) rotatorisches Prinzip,
Teil: Elektrische Energiewandler
b) translatorisches Prinzip (Linearprinzip)
Bild 1.1: Elektrische Maschine als Antrieb einer mit ihr gekuppelten Arbeitsmaschine
1.2 Elektrische und magnetische Energiewandlung
Elektrische Energiewandler basieren für Leistungen ab etwa 1 Watt aufwärts bis hin zu
größten Leistungen auf magnetischen Feldern. Nur bei kleinsten Wandlern ("Mikrotechnik")
wird die Energiewandlung auf Basis des elektrischen Feldes realisiert. Warum? Dies kann
anhand der im magnetischen bzw. elektrischen Feld gespeicherten Energie beantwortet
werden.
Im Elektromagnetismus sind
- elektrisches Feld E bzw. elektrische Flussdichte D = εE ("dielektrische Verschiebung")
- und magnetisches Feld H bzw. magnetische Flussdichte B = μH ("magnetische Induktion“) prinzipiell miteinander verkoppelt.
Bei niedrigen Änderungsraten dieser Feldgrößen ( = niedrige Frequenzen f von wenigen Hz
bis einige kHz) kann diese Kopplung vernachlässigt werden, so dass elektrisches und
magnetisches Feld getrennt betrachtet werden. Die Energiedichte w ( = Energie je Volumeneinheit) im elektrischen Feld E bzw. im magnetischen Feld H ist
w=
ε ⋅ E2
2
=
D2
2ε
bzw.
w=
a)
μ⋅H2
2
=
B2
2μ
.
(1.1)
b)
Bild 1.2: Gespeicherte Energie: a) elektrische Energie im Plattenkondensator, b) magnetische Energie im
Luftspalt zwischen zwei Polschuhen eines Magneten. (Annahme: idealisiertes Homogenfeld, Streufelder an den
Rändern des Kondensators bzw. Magneten vernachlässigt).
Die in einem Kondensator (Plattenabstand d zwischen Plus- und Minusplatte, Plattenfläche
A) (Bild 1.2a) gespeicherte elektrische Energie W ist das Produkt "Volumen x Energiedichte":
W = (A ⋅ d ) ⋅
ε ⋅ E2
TU Darmstadt
2
.
(1.2)
Institut für Elektrische Energiewandlung
Energietechnik
1.7
Teil: Elektrische Energiewandler
Die in einem Luftspalt (Länge d) zwischen zwei Polschuhen eines Magneten (Nord- und
Südpol, Polfläche A) gespeicherte magnetische Energie W (Bild 1.2b) ist "Luftspaltvolumen x
Energiedichte":
μ⋅H
W = (A ⋅ d ) ⋅
2
2
B
= (A ⋅ d ) ⋅
2
(1.3)
2μ
Beispiel 1.2-1:
Vergleich der gespeicherten Energie in einem Kondensator mit der magnetischen Energie in
einem Luftspalt gleichen Volumens ( d = 1 mm und A = 1 m2):
a) Kondensator: Dielektrikum "Luft", Dielektrizitätskonstante: ε 0 = 8.854 ⋅ 10 −12 As/(Vm).
In Luft ist die elektrische Feldstärke durch die Durchschlagfeldstärke ED der Luft (ca. 30
… 40 kV/cm) begrenzt.
ε E2
8.854 ⋅ 10 −12 ⋅ (4 ⋅ 10 6 ) 2
= 1 ⋅ 10 −3 ⋅
= 0.07 Ws
Elektrische Energie: W = A ⋅ d ⋅ 0
2
2
b) Magnetfeld: Permeabilitätskonstante von Luft: μ = μ 0 = 4π ⋅ 10 −7 Vs/(Am).
Das Eisen der Polschuhe des Magneten sättigt ab ca. B = 1.7 T, so dass hier B = 1 T
verwendet wird.
12
B2
= 1 ⋅ 10 −3 ⋅
= 400 Ws
Magnetische Energie: W = A ⋅ d ⋅
2μ 0
2 ⋅ 4π ⋅ 10 −7
Anmerkung:
Moderne magnetische Energiespeicher mit supraleitenden Spulen (zur Vermeidung von
Stromwärmeverlusten) z. B. zur Überbrückung von Stromausfällen nutzen den in (1.3)
beschriebenen physikalischen Effekt zur Speicherung von magnetischer Energie.
Mit welcher Zugkraft F ziehen sich die Platten des Kondensators bzw. die Oberflächen
der Magnetpolschuhe an?
Die gespeicherte Energie W kann in mechanische Arbeit ("Kraft x Weg") verwandelt werden,
wenn durch die Anziehungskraft F die beiden Platten des Kondensators bzw. die beiden
Polschuhoberflächen sich aufeinander zu bewegen, bis sie einander berühren. Sie legen dabei
den Weg d zurück.
F =W /d =
ε ⋅ E2
2
⋅A
bzw.
F=
B2
⋅A
2μ
.
(1.4)
Beispiel 1.2-2:
Elektrische und magnetische Zugkraftdichte f = F/A (zu Bsp. 1.2-1):
a) Kondensator: ε = ε 0 = 8.854 ⋅ 10 −12 As/(Vm), ED = 40 kV/cm = 4 ⋅ 10 6 V/m :
8.854 ⋅ 10−12 ⋅ (4 ⋅ 106 ) 2
= 70.8 N/m2
2
2
b) Magnet: Permeabilitätskonstante: μ = μ 0 = 4π ⋅ 10 −7 Vs/(Am), B = 1 T :
f =
ε0 ⋅ E2
=
B2
12
f =
=
= 398089 N/m2
−
7
2 μ 0 2 ⋅ 4π ⋅ 10
Fazit:
Das magnetische Feld erlaubt wesentlich höhere Energiedichten (hier: 400/0.07 = 5700 !)
bzw. Kräfte, so dass elektrische Energiewandler bevorzugt mit magnetischen Feldern
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
1.8
Teil: Elektrische Energiewandler
arbeiten. Nur bei Mikromotoren (kleine Kräfte) werden auch elektrostatische Kräfte zum
Bewegen der Motorläufer eingesetzt (z. B. Ausnutzung des Piezoeffekts).
Die Kraftwirkung kann unmittelbar aus dem Feldlinienbild verstanden werden (Bild 1.2). Die
E- bzw. B-Feldlinien können in ihrer Wirkung wie "elastische Gummischnüre" aufgefasst
werden, die sich nach Möglichkeit verkürzen wollen und daher auf die Kondensatorplatten
bzw. Polschuhflächen eine Zugkraft ausüben.
1.3 Beispiel eines einfachen elektromechanischen Energiewandlers
a)
b)
Bild 1.3: Einfacher elektromechanischer Energiewandler: a) Eine Spule (Windungszahl Ns) wird durch eine
mechanische Kraft Fm in einem Magnetfeld B, das zwischen zwei Eisen-Polen von einer Erregerspule
(Windungszahl N) erzeugt wird, mit der Geschwindigkeit v bewegt. b) In die bewegte Spule wird über E = v × B
eine elektrische Spannung induziert (hier eingetragen als „innere“ Quellenspannung ui), so dass bei Belastung
der Spule mit einem Widerstand R ein Strom I fließen kann. Es wird die mechanische Leistung Fm.v der Spule in
elektrische Leistung R.I 2 umgewandelt; die bewegte Spule wirkt als elektrischer Generator.
Eine Spule mit Ns Windungen wird durch eine mechanische Kraft Fm in einem Magnetfeld Bδ,
das zwischen zwei Polen eines magnetischen Eisenkreises von einer Erregerspule (N
Windungen, Erregerstrom I) erzeugt wird, mit der Geschwindigkeit v bewegt. In die bewegte
Spule wird durch Bewegungsinduktion eine elektrische Spannung ui induziert, die bei
konstanter Geschwindigkeit v und räumlich konstantem Feld Bδ (Homogenfeld) eine Gleichspannung Ui ist (Bild 1.3).
U i = N s ⋅ v ⋅ Bδ ⋅ l
(1.5)
Wird die Spule (Ri: Spuleninnenwiderstand) mit dem Widerstand R belastet, so fließt ein
Spulenstrom
I s = U i /( R + Ri )
.
(1.6)
GEGEN die Richtung der als „innere“ Quellenspannung eingetragenen induzierten Spannung
Ui und IN Richtung des äußeren Spannungsfalls U am Widerstand R (Bild 1.4a). Es tritt eine
bremsende LORENTZ-Kraft
F = N s ⋅I s ⋅Bδ ⋅ l
(1.7)
an der Spule auf (Bild 1.4b). Um die Bewegung der Spule mit konstanter Geschwindigkeit v
aufrecht zu erhalten, muss daher ständig eine mechanische Kraft Fm = F entgegen der
Richtung von F aufgebracht werden. Von dem die Spule antreibenden mechanischen
Antriebssystem wird der Spule die mechanische Leistung
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
1.9
Teil: Elektrische Energiewandler
Pm = Fm v = Pin
(1.8)
zugeführt, die in elektrische, „innere“ Leistung Pi umgewandelt wird. Abgegeben wird die
elektrische Leistung Pout an den Belastungswiderstand R.
Pin = Fm ⋅ v = F ⋅ v = N s I s lBδ v = I s ( N s vBδ l ) = I sU i = Pi
Pout =
RI s2
=
R ⋅ U i2
(1.10)
( R + Ri ) 2
a)
(1.9)
b)
Bild 1.4: a) Elektrisches Ersatzschaltbild der bewegten Spule als Generator, induzierte Spannung Ui als „innere“
Quellenspannung, b) bremsende LORENTZ-Kraft auf die stromdurchflossenen Leiter im Magnetfeld [14]
Das Verhältnis von abgegebener zu zugeführter Leistung ist der Wirkungsgrad η.
η=
Pout
R
=
<1
Pin
Ri + R
(1.11)
Beispiel 1.3-1:
Zahlenwerte zum einfachen elektromechanischen Energiewandler:
Spule: Ns = 5, Magnetfeld Bδ = 1.2 T, Geschwindigkeit v = 100 m/s = 360 km/h, Länge der
Spulenseite l = 0.5 m, Ri = 0.1 Ohm, R = 1 Ohm:
U i = N s ⋅ v ⋅ Bδ ⋅ l = 5 ⋅ 100 ⋅ 1.2 ⋅ 0.5 = 300 V
I s = U i /( R + Ri ) = 300 /(0.1 + 1) = 272.73 A
F = N s ⋅I s⋅Bδ ⋅ l = 5 ⋅ 272.73 ⋅ 1.2 ⋅ 0.5 = 818.18 N
Pm = Fm v = Pin = 818.18 ⋅ 100 = 81818 W
Kontrolle:
Pin = Pi = I sU i = 272.73 ⋅ 300 = 81818 W
Pout = RI s2 = 1 ⋅ 272.732 = 74382 W
P
74382
1
η = out =
= 0.909 bzw. η =
= 0.909
Pin
81818
0.1 + 1
1.4 Zählpfeilsysteme
Fasst man den Energiewandler als Black-Box auf, so kann gemäß Bild 1.5a) bei positiver an
den Klemmen anliegender Spannung U ein IN den Wandler fließender Strom positiv gezählt
werden. Dann ist auch die zugeführte elektrische Leistung P = U ⋅ I positiv zu zählen. Sie
wird dem Wandler zugeführt; er "verbraucht" diese Leistung. Dieses Zählpfeilsystem heißt
"Verbraucher-Zählpfeilsystem", weil die vom Wandler aufgenommene elektrische
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
1.10
Teil: Elektrische Energiewandler
Leistung positiv gezählt wird. In gleicher Weise wird die vom Wandler abgegebene
mechanische Leistung positiv gezählt.
a)
b)
Bild 1.5: Positive Strom-, Spannungs- und Leistungsflussrichtung, a) Verbraucher-Zählpfeilsystem, b) ErzeugerZählpfeilsystem
Beispiel 1.4-1:
Elektromotor, VZS:
Ein Elektromotor nimmt elektrische Energie auf und wandelt sie in mechanische Energie um.
Er ist ein elektrischer Verbraucher.
Elektromotor: Nennleistung = mechanische Abgabeleistung: 10 kW, Wirkungsgrad: 0.9
- Zugeführte elektrische Leistung: P1 = 10/0.9 = 11.1 kW > 0
- Abgegebene mechanische Leistung: P2 = 10 kW > 0
- Verluste im Motor: Pd = P1 – P2 = 11.1 – 10 = 1.1 kW > 0
Beispiel 1.4-2:
Elektrischer Generator, VZS:
Ein Generator nimmt mechanische Energie auf und wandelt sie in elektrische Energie um. Er
ist ein elektrischer Erzeuger.
Lichtmaschine im Auto: Nennleistung = ele. Abgabeleistung: 750 W, Wirkungsgrad: 0.7
- Abgegebene elektrische Leistung: P1 = -750 W < 0
- Zugeführte mechanische Leistung: P2 = -750/0.7 = -1071 W < 0
- Verluste im Generator: Pd = P1 – P2 = -750 –(-1071) = 321 W > 0
Die Verluste sind "verbrauchte" Leistung und daher im VZS stets positiv. Wird umgekehrt ein
AUS dem Wandler fließender Strom positiv gezählt, so ist auch die zugehörige, vom Wandler
abgegebene elektrische Leistung P positiv ("Erzeuger-Zählpfeil-system", EZS). In diesem
Skriptum wird im Folgenden das Verbraucher-Zählpfeilsystem (VZS) verwendet.
Elektrische Verbraucher wie Heizwiderstände, Elektromotoren, Batterien im Ladezustand,
etc. nehmen im VZS positive Wirkleistung (P > 0) aus dem Netz auf.
Elektrische Erzeuger wie Generatoren, Batterien im Entladezustand, energieliefernde Brennstoffzellen etc. nehmen im VZS negative Wirkleistung aus dem Netz auf (P < 0); sie liefern
Wirkleistung ins Netz.
Beispiel 1.4-3:
Energiewandler von Bsp. 1.3-1 im Verbraucher-Zählpfeilsystem:
Generatorischer Betrieb
Motorischer Betrieb
v > 0, Bδ > 0 Ui > 0
Is < 0, v > 0
Is > 0, v > 0
Pi = U i I s < 0
Pi = U i I s > 0
Pout < 0
Pout > 0
Pm = Pin < 0
Pm = Pin > 0
Is-v-Ebene: 2. Quadrant
Is-v-Ebene: 1. Quadrant
Tabelle 1.1: Generatorische und motorische Energiewandlung im Verbraucherzählpfeilsystem
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
1.11
Teil: Elektrische Energiewandler
Der Energiewandler arbeitet als Generator, daher ist bei positiver Geschwindigkeit v und
positivem Feld Bδ die Spannung Ui positiv, aber der Strom gemäß Bild 1.5a im VZS negativ:
Is = -272.73 A, ebenso Pe = −81818 W und Pm = −74382 W.
Bei Umkehr der Stromrichtung (Stromzufuhr aus einer externen Spannungsquelle,
Vorzeichenumkehr bei Is) wirkt die LORENTZ-Kraft in Richtung der Spulenbewegung und
bewegt sie daher (MOTOR-Prinzip). In der Is-v-Ebene kann Generator- und Motorbetrieb
durch Einteilung in "Quadranten" dargestellt werden. Bei negativer Geschwindigkeit v < 0 ( =
umgekehrte Bewegungsrichtung) können ebenfalls motorischer und generatorischer Betrieb
der Spule eingestellt werden (3. und 4. Quadrant).
Bild 1.6: Vier-Quadrantenbetrieb: Verbraucher-Zählpfeilsystem (VZS):
v > 0, Is > 0 und v < 0, Is < 0: Motor
v > 0, Is < 0 und v < 0, Is > 0: Generator
Beispiel 1.4-4:
Gleichspannungsquelle U0 mit Verbraucher Ra (Bild 1.7a):
Kurzschlussstrom, also Ra = 0: I k = U 0 / Ri , Laststrom: I =
U0
,
Ri + Ra
bezogener Laststrom: i = I / I k ,
Lastspannungscharakteristik: U = U 0 − I ⋅ Ri = U 0 ⋅ (1 − I / I k ) = U 0 ⋅ (1 − i ) = U (i) ,
Abgabeleistung: Pout = U ⋅ I = U 0 I k ⋅ (1 − i ) ⋅ i ,
Wirkungsgrad: η = Pout / Pin = (U ⋅ I ) /(U 0 ⋅ I ) = U / U 0 = 1 − i Pout = U 0 I k ⋅η ⋅ (1 − η )
Den Verlauf von Lastspannung, Wirkungsgrad und Abgabeleistung in Abhängigkeit des auf
den Kurzschlussstrom bezogenen Laststroms zeigt Bild 1.7b.
a)
b)
Bild 1.7: a) Gleichspannungsquelle U0 mit Verbraucher Ra, b) Lastspannung, Wirkungsgrad und Abgabeleistung
in Abhängigkeit des auf den Kurzschlussstrom bezogenen Laststroms
Dieses Beispiel der belasteten Gleichspannungsquelle kennzeichnet die unterschiedlichen
Arbeitsbereiche der elektrischen Energietechnik und der Nachrichtentechnik. Wenn die
Spannungsquelle U0 mit dem Innenwiderstand Ri als elektrisches Netz betrachtet werden,
dann muss der Einsatzbereich der Energietechnik bei möglichst geringem Innenwiderstand Ri
<< Ra erfolgen, um einen hohen Wirkungsgrad zwischen Generatorklemme und Endnutzer zu
erzielen (Bild 1.8). Dadurch ist aber die bei Kurzschluss auftretende Netzkurzschlussleistung
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
1.12
Teil: Elektrische Energiewandler
U 0 I k = U 02 / Ri viel höher als die genutzte Leistung und zerstörerisch groß. Netzkurzschlüsse
müssen somit vermieden oder durch schnelle Leistungsschalter sicher abgeschaltet werden. In
der Nachrichtentechnik ist das oberste Ziel die verzerrungsfreie und damit unverfälschte
Übertragung einer Nachricht. Da auf dem Weg vom Sender (Spannungsquelle U0) zum
Empfänger (Ra) eine Abschwächung des Signalpegels (Widerstand Ri) erfolgt, so dass dieser
im Störungsrauschen des Nachrichtenkanals unterzugehen droht, muss bei gegebener
Sendeleistung eine möglichst hohe Empfangsleistung Pout angestrebt werden
(„Leistungsanpassung“ Ri = Ra)! Dass dabei nur ein kleiner Wirkungsgrad von 50% erreichbar
ist, ist wegen der im Vergleich zur Energietechnik deutlich kleineren Sendeleistungen
verschmerzbar (Bild 1.8, siehe Vorlesung „Nachrichtentechnik“ von Prof. Jakoby)!
a)
b)
Bild 1.8: a) Abgabeleistung in Abhängigkeit des Wirkungsgrads, b) Betrieb bei hohem Wirkungsgrad (Ri << Ra,
η ≈ 0.9) und bei maximaler Abgabeleistung (Ri = Ra, η = 0.5, Leistungsanpassung)
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
2.1
Teil: Elektrische Energiewandler
2. Transformatoren
Das Funktionsprinzip von Transformatoren ist:
- Bei fester Frequenz werden die Spannungs- und Stromamplitude eines Primärsystems 1 (und
ggf. die Phasenlage) über ein Übersetzungsverhältnis in einem Sekundärsystem 2 verändert.
- Die Wirkleistung bleibt (bis auf die Transformatorverluste) in beiden Systemen gleich.
- Die Leistungsübertragung vom Primärsystem auf das Sekundärsystem erfolgt beim
Spartransformator (Bild 2.1a) ohne galvanische Trennung der Stromkreise des Primär- und
Sekundärsystems, beim potentialtrennenden Transformator (Bild 2.1b) berührungslos
(galvanisch trennend).
a)
b)
Bild 2.1: Einphasentransformator: a) als Spartransformator, b) als galvanisch trennender Transformator
Hier wird der galvanisch trennende Transformator behandelt, und zwar in der Form des
Einphasen- und des Drehstrom-Transformators.
a) Einphasen-Transformatoren werden in einphasigen Wechselstromsystemen eingesetzt,
z.B. in elektrischen Lokomotiven zum „Abspannen“ der Fahrdrahtspannung. Bei der
deutschen Bahn wird die Oberleitungsspannung (15kV/16.7Hz) auf die jeweilig erforderliche
Sekundärspannung (z. B. 1000V/16.7Hz) für das elektrische Antriebssystem abgesenkt. In
Computernetzteilen wird die Einphasenspannung aus der Netzsteckdose (in Deutschland:
230V / 50Hz) auf die für die Elektronik deutlich niedrigere Gleichspannung (z. B. 5 … 12V)
über einen Transformator mit nachgeschaltetem Gleichrichter verringert.
b) Dreiphasen-Transformatoren (Drehstromtransformatoren) werden in Drehstromsystemen verwendet: So wird in Kraftwerken die Generatorspannung (z. B. 20kV, 50Hz) über
den Blocktransformator auf die deutlich höhere Spannung der Freileitung (z. B. 400kV, 50
Hz) „hochgespannt“, da der Strom umgekehrt proportional sinkt (20/400 = 0.05) und damit
nur geringe Querschnitte der Freileitungsseile nötig sind. In den Umspannwerken wird diese
hohe Spannung auf die „Mittel“spannung *) (z. B. 20kV) für die verzweigte
Leistungsversorgung in Ballungsgebieten „abgespannt“. In den Ortsnetz-Stationen wird über
Verteiltransformatoren die Spannung von 20kV auf 400V für den Haushalts- und
Gewerbebereich verringert.
*) Genormt sind nur Niederspannung (bis 1kV) und Hochspannung (über 1kV).
Bild 2.2: Einsatz von Drehstromtransformatoren: als Blocktransformator im Kraftwerk (links), im Umspannwerk
(Mitte) und als Verteiltransformator (rechts) für sekundäre Niederspannung (Quelle: Siemens AG)
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
2.2
Teil: Elektrische Energiewandler
2.1 Funktionsprinzip des Einphasentransformators
a) Haupt- und Streufluss
a)
b)
Bild 2.3: Einphasentransformator - Prinzipdarstellung: a) Bezeichnung von Spannung und Strom an Primär- und
Sekundärspule, b) Haupt- und Streufluss [14]
In Bild 2.3a ist ein geschlossener Eisenkreis (Permeabilität μFe, Querschnitt A) mit zwei
elektrisch getrennten Spulen 1 und 2, der Primär- und Sekundärspule mit den Windungszahlen N1, N2 dargestellt. Spule 1 ist stromdurchflossen mit dem zeitlich beliebig veränderlichen Strom i1, während Spule 2 stromlos ist (offene Sekundärklemmen, i2 = 0). Mit dem
Durchflutungssatz wird die magnetische Feldstärke HFe im Eisen berechnet. Als geschlossene
Kurve C wird der Weg einer Feldlinie des Hauptflusses Φh im Eisen mit der Länge sFe
verwendet (Bild 2.3b). Der zeitlich veränderliche HauptflussΦh ist auch mit Spule 2 verkettet
und induziert dort eine Spannung.
H Fe (t ) ⋅ s Fe = N 1 ⋅ i1 (t )
(2.1)
N 1i1 (t )
⋅ A = Λh ⋅ N 1i1 (t )
(2.2)
s Fe
Die magnetische Kopplung von Spule 2 und 1 wird durch die Gegeninduktivität M21
ausgedrückt (Λ: „magnetischer Leitwert“).
Φ h (t ) = B Fe (t ) ⋅ A = μ Fe H Fe (t ) ⋅ A = μ Fe
M 21 =Ψ 2 h / i1 = N 2 ⋅ Φ h / i1 = N1 N 2 ⋅ μ Fe
A
= N 1 N 2 ⋅ Λh ,
Λh = μ Fe
A
(2.3)
s Fe
s Fe
Die Selbstinduktivität des Hauptflusses L1h für Spule 1 beschreibt die Wirkung der Selbstinduktionsspannung in Spule 1 (2.4). Der Feldlinien des Streuflusses Φ1σ von Spule 1 (Bild
2.3b) sind nur mit Spule 1, nicht aber mit Spule 2 verkettet. Die Selbstinduktionswirkung des
Streuflusses in Spule 1 beschreibt die Selbstinduktivität L1σ (2.5).
L1h =Ψ1h / i1 = N 1 ⋅Φ h / i1 = N 12 ⋅ Λh
(2.4)
L1σ =Ψ1σ / i1 = N 1 ⋅Φ1σ / i1 = N 12 ⋅ Λ1σ
(2.5)
- resultierende Selbstinduktivität von Spule 1 und 2 (jeweils Haupt- und Streufluss):
L1 = L1σ + L1h = N 12 ⋅ (Λ1σ + Λh )
,
L2 = L2σ + L2h = N 22 ⋅ (Λ2σ + Λh )
(2.6)
- Gegeninduktivität zwischen Spule 1 und 2:
M 12 = M 21 = N 1 N 2 Λh
TU Darmstadt
(2.7)
Institut für Elektrische Energiewandlung
Energietechnik
2.3
Teil: Elektrische Energiewandler
Beispiel 2.1-1:
Induktivitäten eines Einphasentransformators:
Flussquerschnittsfläche A = 6400 mm2, Feldlinienlänge sFe = 1320 mm, N1 / N2 = 100 / 10
μ Fe = 8000μ 0 , Λ1σ = Λ2σ = 0.001Λh :
Λh = μ Fe A / s Fe = 8000 ⋅ 4π ⋅ 10 −7 ⋅ 6400 ⋅ 10 −6 / 1.32 = 0.0487 mVs/A,
Λ1σ = Λ2σ = 0.0487 μVs/A, M = N1 N 2 Λh = 100 ⋅ 10 ⋅ 0.0487 ⋅ 10 −3 = 48.7 mH
L1 = N12 ⋅ (Λ1σ + Λh ) = 100 2 ⋅ 1.001 ⋅ 0.0487 ⋅ 10 −3 = 487.9 mH, L2 = 4.879 mH
b) Spannungsinduktion
Der von Spule 1 erregte Hauptfluss induziert in Spule 2 eine Spannung (Gegeninduktion,
M), während in Spule 1 sowohl Haupt- als auch Streufluss eine Spannung induzieren (Selbstinduktion, L1h, L1σ). Wird an Spule 2 eine Last angeschlossen (z. B. ein OHM´scher Widerstand), so fließt in Spule 2 ein Strom i2.
Fazit:
Es ist ohne elektrisch leitende Verbindung elektrische Leistung von Spule 1 nach Spule 2
übertragen worden.
Wenn in beiden Spulen Strom fließt, wird der Hauptfluss von beiden Strömen i1 und i2
gemeinsam erregt und induziert in beiden Spulen eine Spannung, die je Spule aus einer
Selbst- und Gegeninduktionsspannung besteht. Diese Spannung als „innere“
Quellenspannung und der OHM´sche Spannungsfall stellen die gesamte, an den Klemmen
messbare Spulenspannung u1 bzw. u2 dar.
u1 = R1i1 + L1
di
di1
+ M 12 2
dt
dt
u 2 = R 2 i 2 + L2
di 2
di
+ M 21 1
dt
dt
(2.8)
c) Übersetzungsverhältnis ü
Die Spannungen und Ströme in Primär- und Sekundärspule können deutlich unterschiedlich
sein. Dies wird durch die Wahl des Übersetzungsverhältnisses festgelegt.
ü=
N1
N2
(2.9)
Aus (2.6) und (2.7) folgt mit (2.9), dass bei Einführung von ü in die Gleichungen (2.8) nur
noch eine Hauptinduktivität Lh sowohl die Selbst- als auch die Gegeninduktivitätswirkung
des Hauptflusses beschreibt.
u 2′ = ü ⋅ u 2 ,
M′ =
i 2′ = i 2 / ü ,
R2′ = ü 2 ⋅ R 2 , L 2′ = ü 2 ⋅ L 2 , M ′ = ü ⋅ M 12
N1
⋅ N1 N 2 Λh = N12 Λh = L1h = Lh ,
N2
(2.10)
2
N
L2′ h = 1 ⋅ N 22 Λh = N12 Λh = L1h = Lh
N2
(2.11)
Damit vereinfachen sich die Spannungsgleichungen (2.8):
u1 = R1i1 + L1
TU Darmstadt
di1
d (i 2 / ü )
+ M 12 ⋅ ü ⋅
,
dt
dt
u 2 ⋅ ü = R2 ü 2 ⋅
i2
d (i 2 / ü )
di
+ L2 ü 2 ⋅
+ M 21ü ⋅ 1
dt
dt
ü
Institut für Elektrische Energiewandlung
Energietechnik
u1 = R1i1 + L1
2.4
di1
di ′
+ Lh 2 ,
dt
dt
Teil: Elektrische Energiewandler
u 2′ = R2′ i 2′ + L2′
di 2′
di
+ Lh 1
dt
dt
(2.12)
d) Ersatzschaltbild
Mit der Auftrennung L1 = L1σ + Lh , L2′ = L2′ σ + L2′ h = L2′ σ + Lh folgt aus (2.12):
u1 = R1i1 + L1σ
di1
d (i1 + i 2′ )
+ Lh
,
dt
dt
u 2′ = R 2′ i 2′ + L2′ σ
d (i1 + i 2′ )
di 2′
+ Lh
dt
dt
.
(2.13)
Es kann damit ein (fiktiver) „gemeinsamer“ Magnetisierungsstrom im definiert werden, der
den Hauptfluss erregt.
i m = i1 + i 2′
Ψ1h = N1Φ h = Lh (i1 + i2′ ) = N12 Λh (i1 +
(2.14)
i2
) = N1Λh ( N1i1 + N 2i2 )
ü
Φ h = Λh ( N1i1 + N 2i2 ) = Λh ⋅ Θ m
(2.15)
Dies entspricht dem Ergebnis des Durchflutungssatzes (2.2), wenn Spule 1 und 2 gemeinsam
den Hauptfluss erregen. Die Spannungsgleichungen (2.13) werden in dem „T-Ersatzschaltbild“ des Einphasentransformators abgebildet.
Bild 2.4: T-Ersatzschaltbild des Einphasentransformators (ohne Ummagnetisierungsverluste) [14]
d) Leerlaufender und belasteter Transformator:
Beim leerlaufenden Transformator (Index 0) liegt die Primärwicklung (Windungszahl N1) an
der Spannung u10(t), aber die Sekundärwicklung (Windungszahl N2) hat offene Klemmen; es
ist also sekundär kein Verbraucher angeschlossen (Bild 2.5a); der Sekundärstrom ist Null i20 =
0. Da die Primärwicklung an zeitlich veränderlicher Spannung liegt, erregt der durch sie
getriebene Primärstrom i10(t) über die Primärwicklung einen zeitlich veränderlichen Fluss, der
eine Selbstinduktionsspannung in der Primärwicklung und eine Gegeninduktionsspannung
u20(t) in der Sekundärwicklung induziert.
a)
b)
Bild 2.5: [15] a) Leerlaufender Transformator: Sekundär ist keine Last angeschlossen. b) Beim belasteten
Transformator (hier: Wechselspannung U1) ist sekundär als Last ein OHM´scher Widerstand Ra angeschlossen
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
u10 = R1 ⋅ i10 + ( L1σ + Lh ) ⋅
2.5
Teil: Elektrische Energiewandler
1
di10
u′
di
, u20 = 20 = ⋅ Lh ⋅ 10
dt
ü
ü
dt
(2.16)
Das Übersetzungsverhältnis der Spannungen bei Leerlauf ist u10/u20 und gemäß (2.16) wegen
R1 > 0, L1σ > 0 nicht gleich dem Wert ü. Werden Primärwicklungswiderstand und primärer
Streufluss, da sie relativ klein sind, vernachlässigt ( R1 ≈ 0, L1σ ≈ 0 ), so folgt: u10 / u20 ≈ ü .
Die experimentelle Überprüfung von ü über u10 / u20 liefert etwas andere Werte für u20 als
u10 / ü , was auf den Spannungsfall am R1 und L1σ zurückzuführen ist. Bei Belastung (Bild
2.5b) fließen primär und sekundär durch die dort induzierte Spannung Ströme i1(t), i2(t), die
mit dem Ampere´schen Durchflutungssatz für eine geschlossene Kurve C (hier eine
Hauptflussfeldlinie gemäß Bild 2.3b) die Hauptfeldstärke HFe im Eisenkern ergeben.
(2.17)
H ⋅ ds = H Fe sFe = Θ = N1i1 + N 2i2 → H Fe ≈ 0 : i2 ≈ −i1 ⋅ ( N1 / N 2 ) = −i1 ⋅ ü
C
Im Eisenkern bei BFe ≈ 1.75 T ist gemäß Bild 5.13, Kurve (2) HFe ≈ 4 A/cm und daher
μ Fe, r = BFe /( μ0 H Fe ) ≈ 3500 relativ hoch, so dass näherungsweise HFe ≈ 0 gilt. Die
Durchflutungen von Primär- und Sekundärwicklung sind (2.17) etwa entgegengesetzt gleich
groß: N 2i2 ≈ − N1i1 („Durchflutungsausgleich“). Daher übersetzen die Ströme unter Last
etwa mit i1 / i2 ≈ 1 / ü bzw. i2′ ≈ −i1 . Bei unendlich großer Hauptinduktivität
μ Fe → ∞, Lh → ∞ gilt exakt: i2′ = −i1 .
Beim „idealen" Transformator übersetzen Spannung und Strom exakt mit ü:
u1 / u2 = ü , i1 / i2 = 1 / ü , denn
a) alle Verluste sind vernachlässigt (R1 = 0, R2 = 0, …)
b) alle Streuflüsse sind vernachlässigt = der gesamte magnetische Fluss ist im Eisenkern.
c) das Eisen hat unendlich große Permeabilität.
Daher sind die Wirkleistungen primär und sekundär identisch:
p1 = u1i1 = (u2 ⋅ ü ) ⋅ (i2 / ü ) = u2 ⋅ i2 = p2 .
Häufig wird der reale Transformator durch den idealen Transformator beschrieben: Der ideale
Transformator übersetzt den Strom umgekehrt wie die Spannung. Im selben Maße, wie er
etwa die Spannung herab transformiert, setzt er den Strom hinauf, und umgekehrt. Tatsächlich
sind die Bedingungen a) und b) wegen des OHM´schen Spannungsfalls von ca. 2 … 4 % der
Nennspannung und des induktiven Streuspannungsfalls von ca. 5 … 10 % nicht wirklich
erfüllt, während Bedingung c) wegen μ Fe ≈ 3500μ0 >> μ0 sehr gut erfüllt ist.
Fazit:
Beim realen Transformator übersetzen Spannung und Strom nicht exakt mit ü, aber wegen der
hohen Eisenpermeabilität die Ströme nahezu exakt mit 1/ü. Bei der Spannungsübersetzung
müssen OHM´sche und streuinduktive Spannungsfälle berücksichtigt werden (KAPP´sches
Dreieck, siehe 2.2).
2.2 Der Einphasentransformator bei Sinusspannungen
a) Ersatzschaltbild
Ist die an den Spulenklemmen anliegende Spannung zeitlich sinusförmig mit der Frequenz f
veränderlich, so kann die komplexe Wechselstromrechnung verwendet werden.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
2.6
{
Teil: Elektrische Energiewandler
}
u1 (t ) = 2 ⋅ U 1 ⋅ cos(ωt + ϕ U ) = Re 2 ⋅ U 1e jϕU ⋅ e jωt ,
ω = 2π ⋅ f
(2.18)
Es wird anstelle von u1(t) nur noch der komplexe Zeiger U 1 = U 1e jϕU in den Spannungsgleichungen (2.13) verwendet. Dies gilt sinngemäß für alle hier genannten zeitlich veränderlichen Größen. Wegen (2.19) werden alle zeitlichen Ableitungen durch Multiplikation
mit jω ersetzt, wobei der Ausdruck ωL als Reaktanz X bezeichnet wird.
L
{
di
d
= Re L ⋅
2 ⋅ Ie jϕ I ⋅ e jωt = Re 2 ⋅ jωLIe jϕ I ⋅ e jωt
dt
dt
}
(2.19)
Die Spannungsgleichungen (2.13) lauten in komplexer Schreibweise:
U 1 = R1 I 1 + jX 1σ I 1 + jX h ( I 1 + I ′ 2 ) U ′ 2 = R2′ I ′ 2 + jX 2′ σ I ′ 2 + jX h ( I 1 + I ′ 2 )
(2.20)
Ströme und Spannungen werden als Effektivwerte, Flüsse und Flussverkettungen wegen der
durch sie bewirkten Sättigung als Scheitelwerte angegeben. Die Hauptfeldspannung
U h = jX h ( I 1 + I ′ 2 ) = jX h I m = jωN1Φ h / 2
(2.21)
ist die induzierte „Nutzspannung“ infolge der zeitlichen Änderung des Hauptflusses. Dieser
induziert auch im Eisen eine Spannung, die Wirbelströme treibt und Wirbelstromverluste
verursacht. Mit dem Ersatzwiderstand RFe für diese im Eisen fließenden Wirbelströme
ergeben sich die Wirbelstromverluste zu
PFe = U h2 / R Fe
.
(2.22)
Das zugehörige Ersatzschaltbild Bild 2.6 folgt aus Bild 2.4. Strom und Spannung werden im
VZS primär und sekundär als zugeführte Größen positiv gezählt. Wenn also von der Primärauf die Sekundärseite Leistung übertragen wird, die sekundär z. B. an einen Belastungswiderstand abgegeben wird, so ist die Primärleistung positiv (= aufgenommene elektrische
Leistung), die Sekundärleistung negativ (= abgegebene elektrische Leistung).
Bild 2.6: T-Ersatzschaltbild des Einphasentransformators
für zeitlich sinusförmig veränderliche Spannungen, Ströme
und Flüsse (mit Ummagnetisierungsverluste im RFe) [14]
TU Darmstadt
Bild 2.7: Zeigerdiagramm für Spannungen
und Ströme beim Einphasentransformator,
RFe→∞, überwiegend induktive Last sekundär [14]
Institut für Elektrische Energiewandlung
Energietechnik
2.7
Teil: Elektrische Energiewandler
b) Zeigerdiagramm
Der Zeiger des Hauptflusses Φh in der komplexen Ebene in Bild 2.7 ist gemäß (2.21) in Phase
mit dem Magnetisierungsstrom Im. Die vom Hauptfluss induzierte Hauptfeldspannung Uh ist
um 90° zum Hauptfluss voreilend (Multiplikation mit j). Der Magnetisierungsstrom wird aus
der Summe von Primär- und Sekundärstrom gebildet. Wegen der hohen Eisenpermeabilität
μFe ist die Hauptinduktivität Lh sehr groß (siehe Bsp. 2.1-1), so dass Im sehr klein ist. Daher ist
I1 deutlich größer als Im, was auf Grund der Zeigersummenbildung von Primär- und
Sekundärstrom einen zum Primärstrom nahezu gegenphasigen Sekundärstrom ergibt:
I 1 ≈ − I ′2 . Im Bild 2.7 ist angenommen, dass die Belastung sekundär induktiv ist (z. B.
Drosselspule als Last), so dass auch primär der Strom I1 der Spannung U1 nacheilt. Die
OHM´schen Spannungsfälle sind in Phase zu den jeweiligen Strömen, die Spannungsfälle zufolge der Streuinduktivitäten eilen um 90° den jeweiligen Strömen vor (Multiplikation mit j).
Fazit:
Die Klemmenspannungen primär und sekundär unterscheiden sich von der Hauptfeldspannung um die OHM´schen und streuinduktiven Spannungsfälle. Beim idealen
Transformator sind U1, Uh und U´2 identisch. Primär- und Sekundärstrom unterscheiden sich
um den Magnetisierungsstrom, der i. A. sehr klein ist (ca. 1 … 2 % des Nennstroms).
Beispiel 2.2-1:
Einphasentransformator: Im Leerlauf ist I1 = Im, da I´2 = 0 ist.
U1N = 350 V, I1N = 80 A, f = 50 Hz, R1 = R2′ = 16 mΩ, M = 49 mH, L1σ = 0.5 mH,
L2σ = 0.005 mH, N1 / N2 = 100 / 10:
ü = 100/10 = 10, Lh = üM = 10 ⋅ 49 = 490 mH, L2′ σ = üL2σ = 10 2 ⋅ 0.005 = 0.5 mH
X 1σ = ωL1σ = 2π 50 ⋅ 0.5 ⋅ 10 −3 = 0.157 Ω, X h = ωLh = 2π 50 ⋅ 0.49 = 154 Ω, X 2′ σ = 0.157 Ω
Leerlaufstrom: I10 = U1N / ( R12 + ( X 1σ + X h ) 2 = 2.27 A = 2.8% des Nennstroms
c) Vereinfachtes Ersatzschaltbild - Kurzschlussspannung
Bild 2.8: Vereinfachtes T-Ersatzschaltbild des
Einphasentransformators für zeitlich sinusförmig
veränderliche Spannungen, Ströme und Flüsse [14]
TU Darmstadt
Bild 2.9: Zeigerdiagramm des
sekundär kurzgeschlossenen
Transformators (u2 = 0: zu Bild 2.8) [14]
Institut für Elektrische Energiewandlung
Energietechnik
2.8
Teil: Elektrische Energiewandler
Der Transformator als elektrisches Betriebsmittel ist für einen bestimmten Nennstrom IN
bemessen, den er dauernd führen kann, ohne thermisch überlastet zu werden, und für eine
bestimmte Nennspannung UN. Der Magnetisierungsstrom Im im Transformator beträgt wegen
der großen Hauptinduktivität nur 1% ... 2% vom Nennstrom (Bsp. 2.2-1), so dass er für
Untersuchungen des belasteten Transformators vernachlässigt werden kann (bei Leerlauf
allerdings nicht, den dann ist der Magnetisierungsstrom als Leerlaufstrom direkt messbar!).
So entsteht das vereinfachte Ersatzschaltbild Bild 2.8, das nur aus den Streureaktanzen und
den OHM´schen Widerständen besteht. Aus (2.21) folgt:
Im =0
I 1 = −I ′2 = I 2 / ü
N 1 I 1 = −N 2 I 2
(2.23)
Es herrscht (nahezu) vollkommener Durchflutungsausgleich; der Primär- und der Sekundärstrom sind gegenphasig und übersetzen sich umgekehrt proportional zu ü, so dass sich die
Primär- und Sekundär-Spulendurchflutung gegenseitig aufheben. Das entspricht einem ideal
magnetisierbaren Eisenkreis (μFe → ∞, Xh → ∞). Primär- und Sekundärspannung
unterscheiden sich gemäß Bild 2.5 um den Spannungsfall an den OHM´schen Widerständen
und an den Streuinduktivitäten. Dieser Spannungsfall heißt "Kurzschlussspannung" Uk,
wenn der Primärstrom I1 den Nennwert I1N hat.
U k = ( R1 + R2′ ) 2 + ( X 1σ + X 2′ σ ) 2 ⋅ I 1N
(2.24)
Die Kurzschlussspannung ist direkt messbar, wenn der Transformator sekundär kurzgeschlossen ist (U2 = 0). Jene primäre Klemmenspannung, die dann in der Primärwicklung
Nennstrom treibt, ist die Kurzschlussspannung (Bild 2.9). Das aus den OHM´schen und streuinduktiven Spannungsfällen gebildete rechtwinklige Dreieck (Bild 2.9) heißt KAPP´sches
Dreieck (Gisbert KAPP). Werden diese Spannungsfälle auf die Nennspannung UN bezogen,
so erhält man sie in Prozent der Nennspannung bzw. als „Per-Unit“-Wert (p.u.). Ein PerUnit-Wert einer Spannung von 1 bedeutet somit Nennspannung.
( R1 + R 2′ ) ⋅ I 1N Rk ⋅ I 1N
,
=
U 1N
U 1N
U
u k = u R2 + u S2 = k
U 1N
uR =
uS =
( X 1σ + X 2′ σ ) ⋅ I 1N X k ⋅ I 1N
=
U 1N
U 1N
(2.25)
(2.26)
Beispiel 2.2-2:
„Bezogene Kurzschlussspannung“ uk :
a) kleinere Leistungstransformatoren: Nennscheinleistung SN = UNIN = ca. 1 ... 1000 kVA:
uk = ca. 3% ... 8% bzw. 0.03 ... 0.08 p.u.
b) große Leistungstransformatoren: SN = 1 ... 1000 MVA:
uk = ca. 8 % ... 15 % bzw. 0.08 ... 0.15 p.u. und mehr.
d) Vereinfachtes Zeigerdiagramm (Im = 0):
U ′2 + ( Rk + jX k ) ⋅ I 1 = U 1 U ′2 = Z ′2 ⋅ I 1
I 1 = − I ′2
(2.27)
Zum vereinfachten Ersatzschaltbild Bild 2.8 gehört wegen (2.27) das Zeigerdiagramm Bild
2.10, das für die drei Belastungsfälle Z ′2 = Ra′ , Z ′2 = jωLa′ = jX L′ , Z ′2 = 1 /( jωCa′ ) = − jX C′
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
2.9
Teil: Elektrische Energiewandler
gezeichnet ist. Bei sekundär OHM´scher Belastung ist –I2´ bzw. I1 in Phase mit U2´, bei
induktiver Belastung eilt –I2´ der Spannung U2´ um 90° nach. Daher ist U 2′ in beiden Fällen
kleiner als U1, wobei bei rein induktiver Belastung der "Spannungseinbruch" von U 2′ am
größten ist. Bei kapazitiver Belastung jedoch ist U 2′ höher als U1 (FERRANTI-Effekt): Die
Spannung U2 nimmt bei Belastung des Transformators gegenüber Leerlauf ZU (bei Leerlauf
ist wegen Im = 0: I1 = 0, U2´ = U1). Das ist i. A. unerwünscht, da die Betriebsmittel sekundär
mit zu hoher Spannung belastet werden.
Bild 2.10 zeigt anschaulich:
Auf Grund des KAPP´schen Dreiecks ist die Spannungsübersetzung U1/U2 NICHT exakt
gleich dem Übersetzungsverhältnis ü = N1/N2, sondern je nach Belastungsart etwas kleiner
oder größer.
Bild 2.10: Vereinfachtes Zeigerdiagramm für Spannungen und Ströme beim Einphasentransformator mit
sekundär a) OHM´scher, b) induktiver, c) kapazitiver Belastung [14]
Beispiel 2.2-3:
Einphasentransformator bei rein kapazitiver Belastung I2 = I2N:
U1N = 350 V, I2N = 800 A, f = 60 Hz, R1 = R2′ ≈ 0 mΩ, L1σ = L2′ σ = 0.5 mH, N1/N2 = 100/10:
ü = 100/10 = 10, X 1σ = X 2′ σ = 2π 60 ⋅ 0.5 ⋅ 10 −3 = 0.188 Ω, X k = X 1σ + X 2′ σ = 0.376 Ω
I 1 = − I ′ 2 = I 2 N / ü = 800 / 10 = 80 A , U 2′ = U1 + X k ⋅ I1 = 350 + 0.376 ⋅ 80 = 380 V
U 2 = U 2′ / ü = 380 / 10 = 38 V
Die Sekundärspannung nimmt von 35 V bei Leerlauf auf 38 V bei Belastung zu (+ 8 %).
e) Zeitlicher Stromverlauf bei Leerlauf und Belastung
Der Zeitverlauf des Leerlaufstroms (ohne Hystereseeinfluss der BFe(HFe)-Kennlinie gemäß
Bild 5.13) ist wegen der nichtlinearen BFe(HFe)-Kennlinie trotz sinusförmig speisender
Primärspannung nicht sinusförmig (Bild 2.11), sondern weist hohe Spitzenwerte bei
niedrigem Effektivwert auf. Die eingeprägte sinusförmige Netzspannung u1 erzwingt wegen
des Induktionsgesetzes bei vernachlässigtem Widerstand R1 einen zeitlich cosinus-förmigen
Flussverlauf Φ1 = Φ1σ + Φ h und damit auch einen entsprechenden Zeitverlauf der Flussdichte
dΦ
Uˆ sin(ωt )
BFe = Φ h / A im Eisen: R1 ≅ 0 u1 = N1 ⋅ 1 = Uˆ1 cos(ωt ) BFe = 1 ⋅
.
dt
AN1
ω
Damit ergibt sich aber wegen der nichtlinearen (gekrümmten) BFe(HFe)-Kennlinie ein
nichtsinusförmiger Verlauf HFe(t) gemäß Bild 2.11. Wegen des Ampere´schen Durchflutungssatzes N1i10 (t ) = H Fe (t ) ⋅ sFe = H Fe ( BFe (t )) ⋅ sFe ist damit auch der Leerlaufstrom i10(t)
zeitlich nicht sinusförmig.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
2.10
Teil: Elektrische Energiewandler
Bild 2.11: Herleitung des nichtsinusförmigen Verlaufs des Leerlaufstroms bei sinusförmigem Flussverlauf
Der Zeitverlauf des primären und sekundären Stroms bei Belastung des Transformators ist
weitgehend sinusförmig, denn nun herrscht Durchflutungsausgleich durch den
Sekundärstrom. Nicht mehr die nichtlineare Eisenkennlinie der Hauptinduktivität, sondern die
linearen Streuinduktivitäten und die sinusförmige Gegenspannung U2 begrenzen den daher
sinusförmigen Strom. Der kleine nichtlineare Magnetisierungsstrom als Anteil des
Gesamtstroms ist kaum merkbar.
f) Der sekundär kurzgeschlossene Transformator (U2 = 0):
Wenn Transformator im Betrieb bei U1 = U1N sekundär kurz geschlossen, dann fließt wegen
der primären Nennspannung ein zu hoher Strom I2k als Kurzschlussstrom sekundär und als
Kurzschlussstrom I1k = I2k/ü primär, wobei I1k = I1N / uk sehr groß ist. Diese Betriebsart ist
daher ein Störfall und nicht dauernd zulässig. Nur Selbstinduktion der kleinen Streuflüsse und
der Spannungsfall an den kleinen Wicklungswiderständen begrenzen den Strom, daher ist
dieser primär und sekundär zu groß.
Beispiel 2.2-4:
Dauerkurzschlussstrom des Transformators :
Speist man den sekundär kurzgeschlossenen Transformator primär mit Nennspannung, so
fließt ein sehr hoher primärer „Kurzschlussstrom“, z.B. bei uk = 4%:
I1k
U1N
U
1
1
=
= 1N =
=
= 25
I1 N
Uk
u k 0.04
R2 + X 2 ⋅ I
k
k
1N
Der Dauerkurzschlussstrom I1k =I1N/uk ist der 25-fache Nennstrom!
2.3 Bauformen von Einphasen-Transformatoren
Die Eisenkerne der Transformatoren bestehen aus den vertikalen Schenkeln und den
horizontalen Jochen. Sie sind aus elektrisch isolierten Stahlblechen (Eisenkohlenstoff Fe-C,
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
2.11
Teil: Elektrische Energiewandler
ca. 0.35 mm dick) geschichtet („lamellierte“ Kerne), um Wirbelströme zu unterbrechen. Es
werden kornorientierte Bleche verwendet. Die Kristallkörner sind durch den Walzprozess der
Herstellung parallel gerichtet. Ihre Vorzugsrichtung (hohes μFe in Vorzugsrichtung der
Körner) ist parallel zur Flussrichtung (siehe Feldlinie in Bild 2.3, 2.12) orientiert. Quer zur
Vorzugsrichtung ist die Permeabilität sehr klein, aber in diese Richtung tritt kein Fluss auf
(magnetisch anisotropes Blech Bild 5.13, Kurve (2)). Die Primär- und Sekundärspule (Spule I
und II) sind zwecks maximaler magnetischer Kopplung koaxial angeordnet. Die
Unterspannungswicklung befindet sich innen nahe am geerdeten Kern (Nullpotential) wegen
der geringeren Leiter-Erde-Spannungsdifferenz.
Bild 2.12: Bauformen von Einphasentransformatoren: a) Kerntyp, b) Manteltyp [14]
- Kerntransformatoren (Bild 2.12a) haben Primär- und Sekundärspule geteilt auf zwei
Schenkeln angeordnet.
- Beim Manteltransformator sind Primär- und Sekundärspule ungeteilt auf einem Mittelkern
angeordnet, die von den Rückschlussjochen wie von einem Mantel umschlossen sind (Bild
2.12b). Dadurch teilt sich der Hauptfluss nach links und rechts und benötigt bei gleicher
Flussdichte eine geringere Jochhöhe hJ´< hJ (Verringerung der Bauhöhe des Transformators).
2.4 Drehstromtransformatoren
a) Bauformen von Drehstrom-Transformatoren
Werden drei Einphasentransformatoren mit einem Drehspannungssystem gespeist, so ist der
Hauptfluss in den drei Transformatoren jeweils um 120° phasenverschoben (Bild 2.13b).
Durch die mit *) gekennzeichnete Kontrollfläche in Bild 2.13b treten alle drei Hauptflüsse
ΦU, ΦV, ΦW hindurch und ergänzen sich stets zu Null (ΦU + ΦV + ΦW = 0). Damit kann dieser
Bereich des Eisens eingespart werden; es entsteht der „Tempeltyp“-Drehstromtransformator
(M. v. DOLIVO-DOBROWOLSKI, 1890, Berlin, Bild 2.13a), der aber schwierig zu bauen
ist. Die Magnetkreise von U, V, W sind voneinander magnetisch unabhängig, so dass die für
den Einphasen-Transformator hergeleiteten Formeln, Ersatzschaltbilder und Zeigerdiagramme
auch für den Drehstromtransformator je Strang U, V, W gültig sind, solange das
Drehspannungssystem „symmetrisch“ ist, d.h. in allen drei Strängen die gleichen Amplituden
bei einer Phasenverschiebung von jeweils 120° vorhanden sind. Die technisch realisierte
Bauform entsteht aus dem Tempeltyp durch Klappen aller drei Schenkel U, V, W in eine
Ebene (Drei-Schenkel-Transformator, Bild 2.14a). Auf jedem der Schenkel U, V, W sind
koaxial innen die Unter- und außen die Oberspannungsspule der Stränge U, V, W angeordnet.
Bei Hinzufügen zweier Außenjoche (Mantelbauform) kann wieder die Jochhöhe verringert
werden (Fünf-Schenkel-Transformator, Bild 2.14b). Der mittlere Schenkel ist nun kürzer,
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
2.12
Teil: Elektrische Energiewandler
aber diese kleine magnetische Unsymmetrie zwischen dem Mittel- und den Außenschenkeln
ist i. A. vernachlässigbar klein.
Bild 2.13: Entstehung des a) Drehstromtransformators (Tempeltyp) aus b) drei Einphasentransformatoren [14]
Bild 2.14: Bauformen von Drehstrom-Transformatoren: a) Dreischenkel-Typ (Kerntyp),
b) Fünfschenkel-Typ (Manteltyp), unten, im Vergleich zum Dreischenkeltyp, oben [14]
Einphasen- und Drehstromtransformatoren werden bei kleineren Leistungen im HundertekVA-Bereich bis ca. 30 kV in brandgefährdeter Umgebung luftgekühlt und gießharz- oder
luftisoliert (Bild 2.15a) ausgeführt, ansonsten – vor allem für größere Leistungen - ölgekühlt
und ölisoliert (Bild 2.15b). Da Öl eine 3-bis 6-fach höhere Durchschlagfeldstärke ED als Luft
besitzt sowie eine höhere Wärmeleitfähigkeit und Wärmekapazität, können ÖlTransformatoren kompakter gebaut werden, benötigen aber einen Ölkessel und eine Ölwanne
unter dem Transformator für das Auffangen des Öls im Störfall. Öltransformatoren in Kesseln
mit Ölfüllung verwenden also den Ölumlauf auch zur Kühlung, wobei unterschieden wird:
(a) natürlicher Konvektion (Oil natural) ON
(b) Zwangsumlauf (Pumpen) (Oil forced) OF
Das heiße Öl wird in Radiatoren durch Luft zurückgekühlt. Für diese äußere Luftbewegung
unterscheidet man:
(c) natürliche Konvektion (air natural) AN
(d) forcierte Luftströmung durch Ventilatoren (air forced) AF
Daher sind die Kombinationen ONAN, ONAF, OFAN, OFAF möglich und üblich! Bei
Luftspulen- u. Gießharztransformatoren herrscht nur Luftkühlung vor, zumeist mit natürlicher
Konvektion: ON, also relativ schwacher Kühlwirkung. Deshalb werden diese
Transformatoren nur für kleine Leistungen (und damit auch kleine Verlustleistungen) gebaut.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
2.13
Teil: Elektrische Energiewandler
Bild 2.15: Ausführungsformen von Drehstrom-Transformatoren: a) Gießharz-Transformator: Typische Nenndaten: 20 kV/400 V, 400 kVA (Siemens AG), b) Öl-Transformator: Typisch Nenndaten: 380 kV/20 kV,
1300MVA (Bohn, T.: El. Energietechnik, TÜV Rheinland)
Für die Leistungsgrenzen von Drehstrom-Transformatoren gilt: Die Baugröße wird von
der Nennleistung, aber auch der Nennspannung (Hochspannung benötigt große
Spannungsabstände wegen der Überschlagsgefahr!) bestimmt. Der Transport vom Hersteller
zum Aufstellungsort i. A. mit der Bahn erzwingt die Einhaltung des Bahnprofils (z. B.
Tunnel!), daher werden große Transformatoren als Fünfschenkel-Transformator gebaut,
weil diese zwar länger, aber niedriger als leistungsgleiche Dreischenkeltypen sind. Bei 400
kV Oberspannung ist die weltgrößte Einheitsleistung (Nennleistung je Transformator) ca.
1500 MVA bei 50 Hz, die transportiert werden kann. Bei 60 Hz ist wegen des um 5/6
kleineren Flusses für gleiche Spannung der Transformator wegen des entsprechend geringeren
Kernquerschnitts um ca. 5/6 kleiner. Bei größeren Leistungen werden „Drehstrombänke“
verwendet: Bei z. B. 1800 MVA bilden drei Einphasentransformatoren je 600 MVA eine
„Drehstrom-Bank“, indem sie zum Drehstromsystem verschaltet werden. Für die
Reservehaltung benötigt man nur einen Einphasentransformator 600 MVA anstatt eines
kompletten Drehstromtransformators 1.8GVA, da (fast) nie zwei oder drei
Einphasentransformatoren gleichzeitig ausfallen. Alternativ schaltet man auch zwei
Drehstromtransformatoren 900 MVA parallel, und muss einen Drehstromtransformator 900
MVA in Reserve halten.
b) Wirkungsgrad von Transformatoren
Die Ummagnetisierungsverluste PFe im Eisen infolge des Hauptflusses bestehen aus
Wirbelstrom- und Hystereseverluste und treten schon bei Leerlauf und Nennspannung (U1 =
U1N) auf (I1 = Im, I2 = 0). Die Stromwärmeverluste sind wegen des kleinen Primärstroms im
Leerlauf (I1 = Im = ca. 0.01I1N) vernachlässigbar:
2
PCu10 = 3R1 I10
= ca. 3R1 ⋅ ( I1N / 100) 2 = 0.0001 ⋅ 3R1 I12N ≈ 0 .
Bei Belastung kommen Stromwärmeverluste als Lastverluste hinzu, die quadratisch vom
Strom abhängen. Der Wirkungsgrad η ist das Verhältnis von abgegebener zu zugeführter
Leistung und ist bei Großtransformatoren größer als 99.5%.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
2.14
Teil: Elektrische Energiewandler
(
)
Leerverluste: P0 = PFe , Lastverluste: PCu1 + PCu 2 = 3 R1I12 + R2 I 22 = PCu ,1+ 2
η=
Pout Pin − Pd Pin − P0 − PCu ,1+ 2
=
=
Pin
Pin
Pin
(2.28)
(2.29)
2.5 Schaltungsvarianten von Drehstromtransformatoren
a) Schaltgruppen, Stundenziffer
Bei Drehstrom-Transformatoren hat man mehrere Möglichkeiten, die Wicklungsenden der
Oberspannungsspulen U-X, V-Y, W-Z bzw. der Unterspannungsspulen u-x, v-y, w-z untereinander zu verbinden.
Beispiel 2.5-1:
In Bild 2.16 ist oberspannungsseitig eine Sternschaltung „Y“ (X, Y, Z miteinander
verbunden) und unterspannungsseitig eine Dreieckschaltung „d“ (Verbindung u-y, v-z, w-x)
ausgeführt: Schaltgruppe Yd.
Die in der Primärspule des Strangs U (Klemmen U-X) induzierte Spannung ist in Phase mit
der auf demselben Schenkel befindlichen Spule unterspannungsseitig (Klemmen w-u). Auf
Grund der Dreieckschaltung ist diese Sekundär-Spannung eine verkettete Spannung. Die
zugehörige fiktive Strangspannung (Phasenspannung) ist um 30° voreilend oder 330°
nacheilend. Diese Phasenverschiebung wird als nacheilend in 11 Schritten von 30° mit der
„Stundenziffer“ 11 (vergleiche mit dem Zifferblatt einer Uhr!, Bild 2.18a) angegeben: Yd11.
Die Übersetzung der Spannung von der Primär- auf die Sekundärseite ist (Bild 2.16).
U1verk
3U1
N
=
= 3⋅ 1
U 2verk
U2
N2
Bild 2.16: Drehstromtransformator: Schaltung:
Stern (Oberspannung), Dreieck (Unterspannung)
= Schaltgruppe Yd, „Stundenziffer“ 11 [14]
(2.30)
Bild 2.17: Bei einphasiger Belastung der Yyn6-Schaltung
sekundär werden die Wicklungen der Schenkel U, W nur
primär stromdurchflossen, was zu hoher Eisensättigung
führt. [1]
Die Spannungsübersetzung U1verk/U2verk von Drehstromtransformatoren ist daher selbst bei
Vernachlässigung des KAPP´schen Dreiecks nicht mehr nur durch das Verhältnis der
Windungszahlen alleine, sondern auch durch die Schaltgruppe bestimmt (2.30). Nur bei der
Yy-Schaltung (Stern primär und sekundär) ist die Spannungsübersetzung wie beim
Einphasentransformator durch das Verhältnis der Strangwindungszahlen (und das KAPP´sche
Dreieck) bestimmt.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
2.15
Teil: Elektrische Energiewandler
b) Unsymmetrische Belastung des Drehstromtransformators
In Bild 2.17 ist die Schaltung Yyn6 dargestellt. Durch Vertauschen der Spulenanschlüsse
sekundär ist die sekundäre Strangsspannung gegenphasig zur primären Strangspannung, was
einer Phasenverschiebung von 6 x 30° = 180° (Stundenziffer 6) entspricht. Unterspannungsseitig ist der Sternpunkt „N2“ als Klemmenanschluss heraus geführt. Wird diese Schaltungsvariante für eine unsymmetrische, nämlich einphasige Belastung (Impedanz Z) sekundär
verwendet (z. B. Haushaltsanschluss: sekundär verkettet 400 V, Strangspannung 230 V), so
fließt der Strom I2 sekundär nur im Strang „v“ und über den Sternpunktsanschluss. Primär
fließt der Strom IV über Strang V zu und zu gleichen Teilen IU = IW über die Stränge W und U
ab. Damit existiert aber KEIN Durchflutungsausgleich (2.23) für Schenkel U und W. Da IU
und IW – abhängig von der Belastung Z – deutlich größer sein können als der typische
Magnetisierungsstrom Im ≈ 0.01IN, wird der magnetische Fluss in diesen Schenkeln sehr hoch.
Damit sättigt aber das Eisen gemäß der B(H)-Kennlinie (siehe Anhang Kap. 5) sehr stark,
wodurch μ Fe = BFe / H Fe sehr klein wird. Folglich ist auch Xh sehr klein.
a)
b)
Bild 2.18: a) Stundenziffer: Beispiel: Phasenverschiebung zwischen U1 und U2: 330°: Wenn U1 bei „0 Uhr“
steht, dann steht U2 bei „11 Uhr“. b) Abschätzung der Spannung sekundär bei einphasiger Belastung Yy:
(Annahme: R1 = R´2 = 0)
Bei sehr kleiner Hauptfeldreaktanz Xh ist die zugehörige Hauptfeldspannung Uh auch klein
und kommt in die Größenordnung des Spannungsfalls an der Streureaktanz.
U
Lh
Abschätzung mit Bild 2.18b ( R1 ≈ R2′ = 0 ): h =
.
U1 Lh + L1σ
Im symmetrischen Fall und damit schwach gesättigtem Eisenkern ist Lh >> L1σ und damit
U h ≈ U1 , wie im Abschnitt 2.2 besprochen. Bei einphasiger Belastung Yy sättigt das Eisen so
hoch, dass im Extremfall z. B. gilt: Lh ≈ 2L1σ, und damit U h ≈ 0.66 ⋅ U1 . Es ergibt sich
gegenüber U h ≈ U1 ein Spannungseinbruch von 33%. Statt der erwarteten 230 V liefert der
Transformator nur ca. U 2 ≈ 0.66 ⋅ 230 = 153V . Das ist technisch unbrauchbar.
Fazit:
Yy-Schaltungen sind für einphasige Belastungen nicht geeignet.
Abhilfe gegen den Spannungseinbruch bei einphasiger Belastung:
Bild 2.19a zeigt eine mögliche Abhilfe für dieses Problem, indem man die Sekundärspulen in
zwei Teilspulen trennt und jede Teilspule mit der Teilspule des benachbarten Schenkels
verbindet. Die Spannungszeiger der beiden Teilspulen je Strang ergeben einen „zickzack“förmigen Zeigerstern („Zickzack-Schaltung“). Die Phasenverschiebung der Primär- und
Sekundärstrangspannung ist 150° (= 5 x 30°) (Schaltgruppe Yzn5). Bei einphasiger Belastung
sekundär zwischen N2 und w fließt sekundär der Strom in einer Teilspule auf Schenkel U und
Schenkel W, ebenso primär, so dass für beide Schenkel ein Durchflutungsausgleich möglich
ist. Damit bleibt das Ersatzschaltbild Bild 2.8 gültig; es erfolgt kein SpannungszusammenTU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
2.16
Teil: Elektrische Energiewandler
bruch sekundär. Die Spulen auf Schenkel V sind stets stromlos. Eine andere Schaltung, die
den sekundären Spannungseinbruch vermeidet, ist Dyn5 (Bild 2.19b).
a)
b)
Bild 2.19: a) Bei einphasiger Belastung der Yzn5-Schaltung erfolgt auf den Schenkeln U, W Durchflutungsausgleich, so dass kein Spannungszusammenbruch sekundär auftritt [14]. b) Bei einphasiger Belastung der
Dyn5-Schaltung erfolgt auf dem Schenkel V Durchflutungsausgleich, so dass kein Spannungszusammenbruch
sekundär auftritt [1].
2.6 Leistungsschildangaben bei Drehstromtransformatoren
Für die Nenn-Scheinleistung gilt unabhängig von der Schaltgruppe (2.31), wobei die auf dem
Leistungsschild angegebenen Nennspannungen stets die verketteten Spannungen und die
Nennströme stets die Außenleiterströme darstellen.
S N = 3 ⋅ U 1N ⋅ I 1N = 3 ⋅ U 2 N ⋅ I 2 N
(2.31)
Beispiel 2.6-1:
Nennscheinleistung SN = 315 kVA, Nennspannungen U1N, U2N (verkettet) 20 kV / 525 V:
Nennströme: primär: I1N = S N /( 3U1N ) = 315 /( 3 ⋅ 20) = 9.1 A
sekundär: I 2 N = S N /( 3U 2 N ) = 315 /( 3 ⋅ 0.525) = 346.4 A
Fazit:
Da im Ersatzschaltbild stets Strangwerte verwendet werden, auf dem Leistungsschild aber
verkettete Spannungen und Außenleiterströme angegeben sind, muss man diese Werte für das
Ersatzschaltbild auf Strangwerte umrechnen.
Die hier im Skript verwendeten Klemmenbezeichungen U-X, V-Y, W-Z (Sternpunkt N) und
u-x, v-y, w-z (Sternpunkt n = N2) sind gemäß Norm DIN42402 folgendermaßen festgelegt:
1U1-1U2, 1V1-1V2, 1W1-1W2 (Sternpunkt 1N) und 2U1-2U2, 2V1-2V2, 2W1-2W2
(Sternpunkt 2N), um eine Verwechslung von Groß- und Kleinbuchstaben zu vermeiden.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
2.17
Teil: Elektrische Energiewandler
Bild 2.20: Blocktransformator im Braunkohle-Kraftwerk "Schwarze Pumpe“, Deutschland: 27 kV / 380 kV,
800 MVA, Kühlung OFAF. Die vom Kraftwerksblock (Dampfkessel, Turbine und Synchron-Turbo-Generator)
erzeugte elektrische Leistung 800 MVA mit der Spannung 27 kV wird über den Transformator auf 400 kV
hochgespannt. Durch den umgekehrt proportional herunter”transformierten” kleinen Strom entstehen nur geringe
Stromwärmeverluste auf der Freileitung (Siemens AG).
a)
b)
Bild 2.21: Hochspannungsprüfung von Transformatoren im Hochspannungs-Prüffeld: a) EinphasenTransformator (Kühlung Oil forced, air forced OFAF) einer Drehstrombank, b) Großtransformator mit drei
dreiphasigen Wicklungssystemen (links vorne: Marx-Stoßspannungserzeugung für Blitzstoß-Prüfung)
(Siemens AG (vormals: ELIN), Weiz, Österreich)
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.1
Teil: Elektrische Energiewandler
3. Gleichstrommaschinen
Einsatzgebiete von Gleichstrommaschinen mit Stromrichterspeisung
Elektrisch fremderregte Gleichstrommotoren werden mit Stromrichterspeisung als
drehzahlveränderbare Antriebe z. B. mit geregelter Drehzahl vielfältig eingesetzt:
- in der Industrie z. B. in Walzwerken, Prüfständen, Kranen, für Drahtziehen, Stanzen,
Kunststoffspritzguss, Folien ziehen („Folienreckmaschine“), ...
- bei der elektrischen Traktion als U-Bahn-, Straßenbahn- und Vollbahnmotoren und als
Antriebe in E-Autos,
- in Schiffen als Haupt- und Hilfsantriebe (z. B. U-Boot-Hauptantriebe), …
Als drehzahlveränderbare Kleinmotoren werden sie eingesetzt
- als batteriebetriebene permanentmagneterregte Kleinmotoren in Automobilen (z. B. für
Fensterheber, Sitzversteller, ...), als Tachogeneratoren,...
- als wechselstromgespeiste elektrisch reihenschlusserregte Universalmotoren in vielen
Haushaltsgeräten (z. B. Mixer, Staubsauger, …) und in Gewerbebetrieben (z. B.:
Bohrmaschinen, …).
3.1 Funktionsweise der Gleichstrommaschine
a) Spannungsinduktion und Gleichrichtung
In Bild 3.1 ist der Aufbau einer zweipoligen elektrisch erregten Gleichstrommaschine mit
dem ruhenden Stator, auch Ständer genannt (mit elektrisch erregtem magnetischen N- und SPol), dem rotierenden Rotor, auch Läufer oder Anker genannt (mit einer exemplarisch
dargestellten Ankerspule und deren Kupferanschlusstücken, dem Kommutator) und den
beiden ruhenden Kohlebürsten-Gleitkontakten dargestellt. Der Läufer (Rotor, Anker) muss
aus geschichteten, isolierten Eisenblechen (lamellierter Eisenkern) aufgebaut sein, da er im
Gleich-Magnetfeld B des Stators rotiert und daher Ummagnetisierungsverluste hat. Die
Wirbelströme werden durch die Lamellierung unterbrochen und damit stark verringert. Der
Läufer hat im Bild 3.1 zwei Nuten, in denen die beiden Spulenseiten der Ankerspule liegen.
Er rotiert mit der Drehzahl n im zweipoligen Gleichfeld B, das durch die zwei ruhenden
Hauptpole (N- und S-Pol) des Eisenstators (Ständer, Stator) erzeugt wird. Der
Statoreisenkörper müsste wegen des Gleichfelds nicht geblecht ausgeführt sein, wird aber
häufig doch lamelliert, um rasche Statorfeldänderungen bei Regelvorgängen ohne
Statorwirbelströme zuzulassen.
a)
b)
c)
Bild 3.1: a) Prinzipdarstellung einer zweipoligen Gleichstrommaschine im axialen Schnitt mit nur einer
repräsentativ dargestellten Ankerspule, b) vereinfachte Darstellung ohne die magnetischen
Ständerrückschlussjoche, c) Schrägansicht der rotierenden Ankerspule ohne Läufereisenkörper, aber mit den
rotierenden Kupferanschlussstücken (Kommutator) und den beiden ruhenden Plus- und Minus-KohlebürstenGleitkontakten
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.2
Teil: Elektrische Energiewandler
Bild 3.2: Axialer Schnitt der zweipoligen Gleichstrommaschine, lineare Abwicklung, Erzeugung des
Luftspaltfelds Bδ und dessen Verlauf längs des Läuferumfangs
Im Bild 3.1 ist die Polzahl 2p = 2, wobei p die „Polpaarzahl“ ist. Im Luftspalt mit der Weite
δ (Bild 3.2) zwischen Ständer und Läufer tritt das Magnetfeld B als nahezu radial gerichtete
Luftspalt-Flussdichte Bδ auf. Jeder Hauptpol mit der Polschuhbreite bp trägt eine mit dem
Feld-Gleichstrom If gespeiste Feld- oder Erregerspule, deren Wickelsinn von Pol zu Pol
entgegengesetzt ist, so dass abwechselnd je ein N- und ein S-Pol entstehen. Mit der
Windungszahl je Polspule Nf,Pol und dem Feld- oder Erregerstrom If ergibt der
Durchflutungssatz für eine geschlossene Kurve C (z. B. eine B-Feldlinie in Bild 3.1a) die
magnetischen Feldstärken HFe im Eisen (s: Stator, r: Rotor) und im Luftspalt Hδ. Dabei hat die
geschlossene Kurve C im Statoreisen den Längenabschnitt sFe,s und im Rotor den
Längenabschnitt sFe,r.
H ⋅ ds = 2Θ f
C
= 2 N f , Pol I f = H Fe, s ⋅ sFe, s + H Fe, r ⋅ sFe, r + 2 Hδ ⋅ δ
(3.1)
Bei vereinfachender Annahme unendlich permeablen Eisen (= Vernachlässigung der
Eisensättigung) μFe >> μ0 ist HFe,s ≈ 0, HFe,r ≈ 0: H δ ⋅ δ = Θ f . Die unter der jeweiligen
Polmitte auftretende maximale Luftspaltflussdichte ist demnach Bδ = μ0Θ f / δ = Bδ ,m (Bild
3.2). Die Luftspaltflussdichte nimmt zu den Polrändern hin wegen der dortigen
Luftspaltvergrößerung ab und ist in der Mitte der Lücke zwischen den Polen Null, wo das
Magnetfeld seine Polarität wechselt („neutrale Zone“). Die längs der
Läuferumfangskoordinate x dargestellte Normalkomponente der Luftspaltflussdichte Bδ(x) mit
dem Maximalwert Bδ,m hat je Pol (mit der Polteilung τp als Distanz zwischen zwei neutralen
Zonen) den Mittelwert Bδ,av. Dieser Mittelwert ist um den Faktor αe („ideelle“ Polbedeckung
αe ≈ 0.7) kleiner als der Maximalwert: Bδ , av = α e ⋅ Bδ , m . Mit der axialen Eisenlänge l
erhalten wir den magnetischen Fluss pro Pol Φ.
Φ = B ⋅ dA =
APol
TU Darmstadt
τp
Bδ ⋅ dA = l Bδ ( x) ⋅ dx = α e Bδ ,mτ pl
APol
(3.2)
0
Institut für Elektrische Energiewandlung
Energietechnik
3.3
Teil: Elektrische Energiewandler
Die Radialkomponente Bδ(x) ist senkrecht auf die tangential gerichtete
Umfangsgeschwindigkeit der Ankerspulenseiten va gerichtet. Die in die rotierende Ankerspule
von Bild 3.1 durch Bewegungsinduktion je Spulenseite (Spulenseitenlänge l) induzierte
Bewegungsfeldstärke Eb ( x) = va × Bδ ( x) ist wegen der Rechte-Hand-Regel in Richtung der
Spulenseite orientiert und längs der Spulenseite konstant. Die bewegungsinduzierte Spannung
je Spulenseite ist daher
l
ui ,c ( x) / 2 = Eb ( x) ⋅ ds = Eb ( x) ⋅ l = va ⋅ Bδ ( x) ⋅ l
.
(3.2a)
0
Da die Luftspaltweite δ im Vergleich zu Ständerinnen- und Läuferaußendurchmesser dsi, dra
sehr klein ist ( d si = 2δ + d ra ≈ d ra ), sind diese beiden nahezu gleich groß: dsi ≈ dra. Daher ist
die Geschwindigkeit der Spulenseiten als Umfangsgeschwindigkeit an der Läuferoberfläche
va = d ra ⋅ π ⋅ n in guter Näherung
va ≅ d si ⋅ π ⋅ n
.
(3.2b)
Die induzierte Spannung in der Spule ui ,c ( x) = (ui ,c / 2) + (ui ,c / 2) = 2va ⋅ Bδ ( x) ⋅ l ist eine
Wechselspannung (Bild 3.3) mit der Frequenz
fa = n ⋅ p = 1/ T
,
(3.3)
da die Spulenseiten abwechselnd unter dem N- und S-Pol vorbei bewegt werden, also der Ort
x der Spulen am Umfang gemäß x = vat mit der Zeit zunimmt. Der zeitliche Verlauf der
induzierten Spulenwechselspannung ui,c(t) über t ist wegen (3.2a) zum räumlichen Verlauf
von Bδ(x) über x proportional: ui ,c ( x) = ui ,c (vat ) = ui ,c (t ) = 2va ⋅ Bδ ( x) ⋅ l (Bild 3.3). Ihr
Scheitelwert ist wegen Bild 3.2 Uˆ i ,c = 2 ⋅ v a ⋅ Bδ ,m ⋅ l , und ihr Mittelwert je Halbperiode
ui ,c, av = 2 ⋅ va ⋅ Bδ , av ⋅ l . Die Ankerspule ist mit ihren beiden Enden an je ein Kupfersegment
(Kommutatorlamelle) mit dazwischen liegender Isolierung (i. A. aus Glimmer)
angeschlossen. Dieses Kupfer-Glimmer-Gebilde heißt Kommutator, auf dem je eine im
Stator fixierte Plus- und Minus-Kohlebürste gleiten. Diese ruhenden Bürsten greifen stets die
induzierte Spannung in einer Polaritätsrichtung ab, da sie ihre Lage relativ zu den Statorpolen
nicht ändern (Bild 3.1c). Sie richten daher die induzierte Spannung auf mechanische Weise
gleich. Die zu ui,c(t) gehörige gleichgerichtete induzierte Spannung ui(t) tritt zwischen der
Plus- und Minus-Bürste auf (Bild 3.4).
Bild 3.3: Spulenwechselspannung ui,c(t) und ihre
Gleichrichtung mit dem Kommutator ui(t)
TU Darmstadt
Bild 3.4: Abgewickelte Darstellung von Läufer und Ankerspule von Bild 3.1 mit den Kommutatorlamellen 1 und 2
Institut für Elektrische Energiewandlung
Energietechnik
3.4
Teil: Elektrische Energiewandler
Hat die Ankerspule Nc Windungen, so erhöht sich die induzierte Spannung um Nc. Der
zeitliche Mittelwert dieser gleichgerichteten Spannung ist ui,av (3.4), während der reale
Verlauf zwischen Null und dem Maximalwert ui,m (3.5) schwankt. Die gleichgerichtete
induzierte Spannung ui und ihr Mittelwert ui,av = Ui werden als „innere“ Quellenspannung der
Ankerspulen in den Bildern 3.4, 3.5, 3.6 und folgenden eingetragen.
ui , av = N c ⋅ 2 ⋅ va ⋅ Bδ , av ⋅ l = N c ⋅ 2 ⋅ va ⋅ α e Bδ , m ⋅ l
(3.4)
ui , m = N c ⋅ 2 ⋅ va ⋅ Bδ , m ⋅ l
(3.5)
b) Glättung der gleichgerichteten Spannung
Die eine Ankerspule in Bild 3.4 belegt mit beiden Spulenseiten die Nuten in derselben Höhe
(derselben „Schicht“) als Einschichtwicklung. Das zugehörige elektrische Ersatzschaltbild
zeigt Bild 3.5a, wo über die Kohlebürsten ein äußerer Belastungswiderstand R angeschlossen
ist, so dass ui den Ankerstrom ia treiben kann. Dies ist der einfachste Fall eines elektrisch
fremderregten Gleichstromgenerators, dessen Läufer von z. B. einer Turbine mechanisch mit
der Drehzahl n angetrieben wird, aus einer Gleichstromfremdquelle If elektrisch erregt wird
und im Belastungswiderstand R die zugeführte mechanische Leistung als elektrische
Verlustleistung in Wärme umsetzt. Der gleichgerichtete äußere Ankerstrom ia fließt in der
Spule als Spulenwechselstrom is mit der Amplitude Is im Erzeuger-Zählpfeilsystem gegen die
Richtung von ui (Bild 3.5a, Bild 3.6a) und bildet mit dem Luftspaltfeld B eine Lorentz-Kraft
F, die gegen die Ankerumfangsgeschwindigkeit v gerichtet ist, also bremsend wirkt.
a)
b)
c)
Bild 3.5: a) Elektrisches Ersatzschaltbild der Ankerspule von Bild 3.4 mit einem äußeren Belastungswiderstand
R, positive äußere Stromrichtung bzgl. R im Verbraucher-Zählpfeilsystem, bzgl. ui („innere“ Quellenspannung)
im Erzeuger-Zählpfeilsystem, b) Wie Bild 3.4b, jedoch zwei statt einer Ankerspule in den beiden Nuten als
Zweischichtwicklung, c) zugehöriges Ersatzschaltbild
a)
b)
Bild 3.6: Lorentz-Kraft F auf einen Ankerspulenleiter im a) Generatorbetrieb, b) Motorbetrieb (ui als „innere“
Quellenspannung) [14]
Würde statt des äußeren Widerstands R eine äußere Gleichspannungsquelle U > ui angeschlossen werden, so kehrt sich die Ankerstromrichtung ia um. Der Strom fließt in Richtung
von ui (Bild 3.6b) und bildet eine Lorentz-Kraft mit dem Luftspaltfeld, die in Richtung der
Ankerumfangsgeschwindigkeit wirkt, den Läufer also antreibt, was dem Motorbetrieb
entspricht. Damit ist die Gleichstrommaschine prinzipiell funktionsfähig, die mit doppelter
Ankerfrequenz stark welligen Größen „Gleichspannung“ und „Gleichstrom“ aber technisch
„unschön“. Deshalb wird der Anker mit mehr Spulen ausgestattet, um geglättete Gleichgrößen
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.5
Teil: Elektrische Energiewandler
zu erzeugen. Zunächst kann bei zwei Ankernuten eine zweite Ankerspule parallel zur ersten
als Zweischichtwicklung (Ober- und Unterschicht in der Nut) eingelegt werden. In diese
wird dieselbe Spannung induziert. Wegen der Parallelschaltung ist die Gesamtspannung an
den Bürsten dieselbe wie bei einer Ankerspule, aber der äußere Ankerstrom ist doppelt so
groß. An der welligen Kurvenform ui(t) Bild 3.3 hat sich noch nichts geändert. In Bild 3.8a ist
diese Kurvenform für einen idealisiert rechteckförmigen Luftspaltfeldverlauf Bild 3.2, wo das
Feld im Bereich des ideellen Polbogens αeτp den Maximalwert Bδ,m hat und dazwischen („Pollücke“) Null ist, idealisiert dargestellt. Wird jedoch die Anzahl der Nuten auf vier verdoppelt,
können vier Spulen eingelegt werden, wovon je zwei (Spule 1 und 2 bzw. Spule 3 und 4)
gemäß Bild 3.7a in Serie und mit den jeweils anderen beiden parallel geschaltet sind. Spulen 2
und 4 erhalten die induzierte Spannung gegenüber 1 und 3 um eine Viertel Periode T/4 zeitversetzt induziert, da sie um eine halbe Polteilung am Umfang versetzt angeordnet sind. Die
Spannungssumme von Spule 1 und 2 bzw. 3 und 4 hat gemäß Bild 3.8b eine Welligkeit mit
der Periode T/4 (allgemein Tc) und die Welligkeitsamplitude ist zwar absolut gleich groß, aber
relativ (bezogen auf den Spannungsmittelwert) nur halb so groß.
a)
b)
Bild 3.7: a) Vier Ankerspulen als Zweischichtwicklung in abgewickelter Darstellung, b) zugehöriges
Ersatzschaltbild
a)
b)
Bild 3.8: Idealisierter Verlauf der welligen gleichgerichteten Spannung ui zwischen Plus- und MinusKohlebürste a) bei einer Ankerspule (vgl. den realen Verlauf Bild 3.3) als Einschichtwicklung bzw. zwei
Ankerspulen als Zweischichtwicklung, b) bei vier Ankerspulen als Zweischichtwicklung (siehe Bild 3.7)
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.6
Teil: Elektrische Energiewandler
Werden gemäß Bild 3.9a mehr als zwei Ankerspulen in Serie geschaltet (z. B. je Pol K/(2p) =
6) und an den Spulenenden mit weiteren Kupfergleitstücken („Kommutator-Lamellen“), die
den Kommutator bilden, versehen, so verringert sich die Welligkeit entsprechend. Es werden
dann K Ankernuten und K Kommutatorlamellen benötigt. In den Spulen wird die in Bild 3.3
dargestellte Spannung nacheinander induziert, da die Spulen räumlich nacheinander (also
zeitlich versetzt) das Luftspaltfeld durchlaufen. Die Serienschaltung dieser Spannungen
glättet den Verlauf der an den Kohlebürsten abgegriffenen Gleichspannung (Bild 3.9b).
a)
b)
Bild 3.9: a) Abgewickelte Zweischicht-Ankerwicklung mit Serienschaltung von sechs Ankerspulen pro Pol;
Blick von oben auf Hauptpole (gestrichelt) und Kommutator [14], b) Glättung der gleichgerichteten Spannung ui
einer zweipoligen Gleichstrommaschine (2p = 2) durch Serienschaltung von K/(2p) = K/2 = 4 Ankerspulen. Die
Restwelligkeit ist noch ziemlich groß, während sie bei realen Maschinen mit typisch 30 Spulen in Serie
entsprechend sehr viel kleiner ist.
a)
b)
Bild 3.10: a) Schematische Darstellung der welligen Ankerspannung bei drei Ankerspulen in Serie pro Pol,
b) Vollständiges Zweischicht-Wicklungsschema einer zweipoligen Schleifenwicklung mit K = 12 Ankerspulen
Zwischen der Plus- und Minusbürste liegen in Bild 3.10a K/(2p) = 3 Ankerspulen in Serie
pro Pol. Die Welligkeit hat Allgemein die Periode TC = 1 /(n ⋅ K ) mit fC = 1 / TC als
Lamellenfrequenz. Es werden K Kommutatorlamellen und Qr = K Ankernuten (Bild 3.10a
bei 2p = 2: Qr = K = 6) benötigt. In Bild 3.9a mit K/(2p) = 6 Ankerspulen in Serie lassen sich
auf Grund der Zweischichtwicklung weitere sechs Spulen durch Fortsetzung des Schemas ein-
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.7
Teil: Elektrische Energiewandler
fügen, so dass der vollständige Ankerwicklungszug wie in Bild 3.7 als Schleifenwicklung in
sich geschlossen ist.
Fazit:
Bei 2p = 2 und daher K/(2p) = K/2 Spulen in Serie je Pol sind im Rotor K Spulen in Qr = K
Nuten vorhanden, die mit je zweimal K/2 Spulen parallel an der Plus- und Minusbürste
anliegen. Der Mittelwert der nunmehr nahezu ideal glatten Spannung zwischen den beiden
Bürsten ist (3.6).
Ui =
K
K
⋅ ui , c, av = ⋅ N c ⋅ 2va ⋅ α e Bδ , m ⋅ l
2
2
(3.6)
Mit dem magnetischen Fluss pro Pol (3.2) wird (3.6) in (3.7) umgeformt.
2p = 2: U i =
2v
K
⋅ N c ⋅ a ⋅Φ
2
τp
.
(3.7)
Beispiel 3.1-1:
Induzierte Spannung in einem Kleinmotor, n = 10 000/min:
Statorinnendurchmesser dsi = 7 cm, Polzahl 2p = 2, Rotorlänge l = 7 cm, LuftspaltFlussdichte-Maximum Bδ,m = 0.75 T, Windungszahl je Ankerspule Nc = 20, K = 12:
Polteilung τp = 7π/2 = 11 cm, va = 0.07 ⋅ π ⋅10000 / 60 = 36.65m/s = 131.9km/h ,
Fluss pro Pol: Φ = α e ⋅ τ p ⋅ l ⋅ Bδ , m = 0.7 ⋅ 0.11 ⋅ 0.07 ⋅ 0.75 = 0.004 Wb
U i = ( K / 2) ⋅ N c ⋅ (2va / τ p ) ⋅ Φ = (12 / 2) ⋅ 20 ⋅ (2 ⋅ 36.65 / 0.11) ⋅ 0.004 = 323.3 V
Beispiel 3.1-2:
Vollständiges Zweischicht-Wicklungsschema eines 2p = 2-poligen Kleinmotorankers mit K =
12 Kommutatorsegmenten und 12 Spulen in Qr = 12 Nuten:
In Bild 3.10b liegen zwischen der Plus- und Minusbürste A und B die Spulen so, dass gerade
Spule 4 und 10 kontaktiert wird. Das Wicklungsschema kann nachverfolgt werden, indem
man den Spulen folgt. Beginnend bei der 1. Spule: Deren eine Spulenseite liegt in Nut 1,
Oberschicht (OS) und geht über die (nicht dargestellte Stirnverbindung, siehe Bild 3.9a) zur
zweiten Spulenseite in Nut 7, Unterschicht (US) und dann zum Kommutatorsegment 2. Hier
beginnt (in Serie geschaltet) die 2. Spule, die in Nut 2, OS und Nut 8, US, liegt und an
Kommtatorsegment 3 endet. Die weitere Serienschaltung ist: 3. Spule: 3 OS – 9 US, 4. Spule:
4 OS – 10 US, 5. Spule: 5 OS – 11 US, 6. Spule: 6 OS – 12 US, 7. Spule: 7 OS – 1 US, 8.
Spule: 8 OS – 2 US, 9. Spule: 9 OS – 3 US, 10. Spule: 10 OS – 4 US, 11. Spule: 11 OS – 5
US, 12. Spule: 12 OS – 6 US. Diese Spule endet an Kommutatorsegment 1, wo wieder die 1.
Spule beginnt: 1 OS – 7 US usw. Es ergibt sich ein in sich geschlossener
Schleifenwicklungszug, der durch die Kontaktierung der Bürsten A und B in zwei parallele
Zweige geteilt wird, die jede für sich die induzierte Spannung (3.6) aufweist.
3.2 Ankerwicklung
Gemäß Bild 3.10b wird die Ankerwicklung als Zweischichtwicklung ausgeführt, so dass in
jeder Ankernut zwei Spulenseiten von zwei unterschiedlichen Spulen gemeinsam
übereinander liegen. Die untere Spulenseite bildet die „Unterschicht“, die obere die
„Oberschicht“ (Bild 3.12a). Die Darstellung Bild 3.10b ist unhandlich und wird daher in
abgewickelter Form Bild 3.11a verwendet. Meist werden mehrere Spulen (z. B. u = 3)
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.8
Teil: Elektrische Energiewandler
nebeneinander in eine Nut gelegt (Bild 3.12b), so dass je Nut 2u Spulenseiten mit je Nc
Windungen liegen. Es sind insgesamt K Spulen im Anker vorhanden, die an K
Kupferlamellen des Kommutators angeschlossen sind. Die zwei Gruppen zu je K/2 Spulen in
Serie bei zweipoligen Maschinen bilden zwei parallele elektrische Pfade mit der jeweils
gleichen induzierten Spannung Ui. Die Anzahl der parallelen Ankerzweige 2a = 2 ist somit
gleich groß wie die Anzahl der Pole 2p = 2. Bei mehr als 2 Polen wird das Wicklungsschema
einfach fortgesetzt (Bild 3.11b für 2p Pole), bis sich der Wicklungsszug wieder schließt.
Wegen der Polfolge N-S-N-S… wird auch die induzierte Spannung je Pol +Ui, -Ui, +Ui, -Ui,
... über zusätzliche Plus- und Minus-Kohlebürsten im Abstand von je einer Polteilung parallel
geschaltet. In Bild 3.11b wären dies bei 2p = 6 für eine sechspolige Anordnung drei Plusund die drei Minusbüsten, die elektrisch jeweils verbunden sind, so dass nach außen hin am
Klemmenbrett der Maschine insgesamt ein Plus- und ein Minusanschluss für die
Ankerwicklung entsteht, welche 2a = 2p = 6 parallele Wicklungszweige aufweist. Zwischen
zwei benachbarten Bürsten liegen K/(2a) = K/(2p) Ankerspulen in Serie. Eine ausgeführte 6polige Schleifen-Zweischichtwicklung in abgewickelter Darstellung zeigt Bild 3.13.
a)
b)
Bild 3.11: a) Zweischicht-Wicklungsschema für zwei Pole einer Schleifenwicklung mit K/(2p) = 12 Ankerspulen
in abgewickelter Darstellung. Es sind nur 6 der 12 Spulen dargestellt (links: Oberschichtspulenseiten, rechts:
Unterschichtspulenseiten), b) Fortsetzung des Wicklungsschemas a) für 2p > 2
a)
b)
Bild 3.12: Ankerspulen in Läufernuten der Gleichstrommaschine [14]
a) Anschlüsse einer mehrwindigen Ankerspule (Nc > 1) an benachbarten Kommutatorlamellen
b) Querschnitt durch eine Ankernut (Rotornut): 2 Schichten, u = 3 Spulen/Schicht, Nc = 23 Windungen je Spule,
somit 2x3x23 Leiter/Nut
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.9
Teil: Elektrische Energiewandler
Bild 3.13: Schleifenwicklung einer 6-poligen Gleichstrommaschine (abgewickelte Darstellung, volle Linien:
Oberschicht, gestrichelt: Unterschicht), 6 parallele Zweige 2a = 6: je 3 Bürsten parallel [14]
Beispiel 3.2-1:
Kenngrößen einer Ankerwicklung:
Windungszahl je Ankerspule Nc = 5, Anzahl der Spulenseiten je Läufernut und Schicht: u = 3
Anzahl der Läufernuten: Q = 30, Polzahl = Anzahl der parallelen Ankerzweige: 2p = 2a = 4:
- Anzahl der Kommutatorlamellen und Ankerspulen: K = Q ⋅ u = 30 ⋅ 3 = 90
- Anzahl der Spulenseiten je Nut: 2 ⋅ u = 2 ⋅ 3 = 6
- Anzahl der Leiter am Läuferumfang: z = 2 ⋅ N c ⋅ K = 2 ⋅ 5 ⋅ 90 = 900
Aus (3.7) folgt mit K/(2a) Ankerspulen in Serie zwischen zwei benachbarten Bürsten die
induzierte Gleichspannung (3.8).
Ui =
2v
K
K
p
p
⋅ N c ⋅ a ⋅Φ =
⋅ N c ⋅ (2 ⋅ 2 pn) ⋅ Φ = 2 KN c ⋅ ⋅ nΦ = z ⋅ n ⋅ Φ
2a
2a
a
a
τp
(3.8)
Wird die mechanische Drehzahl n durch die mechanische Kreisfrequenz Ω m = 2πn ersetzt, so
folgt mit der Maschinenkonstante k (3.10) die Merkformel (3.9).
Ui = k ⋅ Ω m ⋅Φ
Maschinenkonstante k =
(3.9)
1 z⋅ p
⋅
2π a
(3.10)
Beispiel 3.2-2:
Vierpolige Gleichstrommaschine , Daten von Bsp. 3.2-1:
1 900 ⋅ 2
4500
n = 4500/min, Φ = 0.008 Wb, z = 900, p = a = 2: U i =
⋅
⋅ (2π
) ⋅ 0.008 = 540 V
2π
2
60
3.3 Ankerstrom und elektromagnetisches Drehmoment
Aus Bild 3.7b folgt mit (3.9) das Ersatzschaltbild Bild 3.14a der Ankerwicklung als
Gleichspannungsquelle mit dem Innenwiderstand als ohm´schen Widerstand der
Ankerwicklung Ra, wobei die Plus- und Minus-Klemme die Bürsten der Gleichstrommaschine
sind. Im Generatorbetrieb fließt daher außen ein Ankergleichstrom Ia, wenn diese Wicklung
mit einem OHM´schen Widerstand R belastet wird. In der Ankerwicklung selbst teilt sich
dieser Ankerstrom auf die 2a parallelen Zweige auf Ic = Ia/(2a) und ist – wie die induzierte
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.10
Teil: Elektrische Energiewandler
Spulenspannung – ein Wechselstrom ic(t), der je parallelem Ankerzweig zwischen den
Werten +Ia/(2a) und -Ia/(2a) mit der Frequenz fa pulsiert (Bild 3.15a). Erst durch die
Gleichrichtung über den Kommutator wird daraus der außen wirksame Ankergleichstrom Ia.
a)
b)
Bild 3.14: Ersatzschaltbild der Gleichstromankerwicklung im a) Generator-, b) Motorbetrieb. Zu a): ErzeugerZählpfeilsystem für die Ankerwicklung, Verbraucherzählpfeilsystem für den Belastungswiderstand R. Zu b):
Verbraucherzählpfeilsystem für die Ankerwicklung. Induzierte Spannung Ui ist „innere“ Quellenspannung.
Beispiel 3.3-1:
Vierpolige Ankerwicklung:
Ankerstrom Ia = 50A, 2p = 2a = 4: Je Spule fließt ic mit der Amplitude Ia/(2a) = 50/4 =
12.5A. Je Bürste (2 Plus-, 2 Minusbürsten) fließt der Bürstenstrom Ia/a = 50/2 = 25A.
Während der Zeit Tcom schließt die Bürste jede Spule kurz, wenn die Bürste zwei benachbarte
Kommutatorsegmente überdeckt (z. B. Bild 3.13: Segmente 5 und 6, 10 und 11, 15 und 16, 20
und 21, 26 und 27, 31 und 1). Während dieser Zeit liegen die beiden Seiten der Ankerspule in
der „neutralen“ Zone zwischen den Polen (in Bild 3.13 z. B. die Spule, die an Segmente 5 und
6 angeschlossen ist), so dass keine Spannung in die Spule induziert wird. In dieser Zeit muss
der Ankerspulenstrom ic(t) seine Polarität in der betreffenden Spule gemäß Bild 3.15a
wechseln (z. B. von positiver zur negativen Stromrichtung), weil diese Spule aus der einen
Serien-Gruppe von K/(2p) Spulen (z. B. unter einem N-Pol, Bild 3.13) heraus“wandert“ und
durch die Rotordrehung in die nächste Serien-Gruppe von K/(2p) Spulen (unter einem S-Pol)
hinen“wandert“.
a)
b)
Bild 3.15: Ankerstrom Ia : a) Der Ankerspulenstrom ic ist ein Wechselstrom. b) Kraftbildung auf die stromdurchflossenen Ankerleiter im Ständermagnetfeld B
Bild 3-15b zeigt, dass auf diese Weise unter dem N-Pol (positives Luftspaltfeld) alle
Spulenseiten den Spulenstrom in positiver und unter dem S-Pol (negatives Luftspaltfeld) in
negativer Richtung führen. Die LORENTZ-Kraft F je Ankerleiter wirkt mit der RechtenHand-Regel gemäß Bild 3.15b in Umfangsrichtung. Ihre mittlere Größe erhalten wir mit dem
räumlich mittleren Magnetfeld Bδ,av gemäß (3.11).
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
F=
3.11
Teil: Elektrische Energiewandler
Ia
I
⋅ Bδ , av ⋅ l = a ⋅ α e Bδ , m ⋅ l
2a
2a
(3.11)
Sie ist unter den N-Polen und S-Polen wegen F ~ I a ⋅ Bδ ,av = (− I a ) ⋅ (− Bδ ,av ) stets in dieselbe
Umfangsrichtung orientiert (Bild 3.15b), so dass die Summenkraft am Umfang durch die
Wirkung aller z Leiter zustande kommt. Mit dem Hebelarm des halben Läuferdurchmessers
(dra/2 ≅ dsi/2) ergibt sich das elektromagnetische Drehmoment Me als Merkformel (3.12).
Me = z ⋅ F ⋅
Me =
2 pτ p
d si
I
d
I
1 zp
= z ⋅ a ⋅ α e Bδ ,m ⋅ l ⋅ si = z ⋅ a ⋅ α e Bδ ,m ⋅ l ⋅
=
⋅ ⋅ I a ⋅ α e Bδ ,mτ p l
2
2a
2
2a
2π
2π a
1 zp
⋅ ⋅ I a ⋅Φ = k ⋅ I a ⋅Φ
2π a
(3.12)
Das vom Ankerstrom erregte Läufer-Magnetfeld darf nicht mit dem Ständer-Hauptfeld
verwechselt werden; es trägt nichts zur Drehmomentbildung bei. Es wird durch die
Induktivitäten Lc der Ankerwicklungsspulen beschrieben. Durch die Stromwendung (Bild
3.15a) kommt es wegen u R = − Lc ⋅ dic / dt = − Lc ⋅ I a /(a ⋅ Tcom ) zu einer zusätzlichen Spannung
(„Reaktanzspannung“, Index R) in jenen Spulen, die gerade von den Bürsten kurz geschlossen
sind, da sich dort der Strom wendet. Diese Reaktanzspannung zündet zwischen der Bürste und
dem sich von ihr trennendem Kommutatorsegment einen „Abschaltfunken“
(„Bürstenfeuer“), der durch Funkenerosion Bürsten- und Kommutatoroberfläche schädigt.
Bei größeren Gleichstrommaschinen ab ca. 1 kW Nennleistung werden deshalb in den
Pollücken zwischen den Hauptpolen sogenannte Wendepole eingesetzt, die in die
stromwendenden („kommutierenden“) Spulen eine Zusatzspannung uW entgegen gesetzt zu uR
induzieren, so dass in Summe u R − uW ≈ 0 ist und die schädlichen Schaltfunken nahezu
verschwinden. Kleinere Gleichstrommaschinen z. B. mit Permanentmagneten im Ständer zur
Erregung des Hauptfelds kommen aus Kostengründen ohne Wendepole aus (Näheres zu den
Wendepolen und weiteren Details für große Gleichstrom-Maschinen: siehe Vorlesung
„Elektrische Maschinen und Antriebe“).
3.4 Elektromechanische Energiewandlung in der Gleichstrommaschine
Die Gleichstrommaschine im Motorbetrieb wird an den Klemmen der Ankerwicklung mit
der Gleichspannung U (z. B. aus einer Batterie) gespeist. Das Hauptfeld des Ständers wird
davon unabhängig mit Permanentmagneten oder elektrisch über Erregerpole erregt. Wird der
Spannungsfall an den Bürsten Ub (ca. 2V für Plus- und Minusbürste) vernachlässigt, so muss
die außen anliegende Spannung U um den Ankerspannungsfall größer als Ui sein (Bild
3.14b), damit Strom in die Ankerwicklung fließt.
U = U i + I a Ra (Motorbetrieb)
(3.13)
Die zugeführte elektrische Leistung Pin = Pe wird zum Teil in Stromwärmeverluste
PCu = Ra I a2 (+U b I a ) umgesetzt. Es verbleibt die innere Leistung Pi, die in mechanische
Leistung Pm umgesetzt wird, welche an der Welle als Pout (Pm abzüglich der der
Läuferverluste wie z. B. Ummagnetisierungsverluste im Läuferblechpaket und
Reibungswärme in den Lagern) abgegeben wird. In (3.14), (3.15) wurden alle Verluste bis auf
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.12
Teil: Elektrische Energiewandler
die Stromwärmeverluste in der Ankerwicklung vernachlässigt, so dass für den Wirkungsgrad
im Motorbetrieb(3.16) gilt.
Pin = U ⋅ I a = (U i + I a Ra ) ⋅ I a = U i I a + Ra I a2 = Pi + PCu
(3.14)
Pout = Pi = U i ⋅ I a = kΦΩ m ⋅ I a = kΦI a ⋅ Ω m = M e ⋅ Ω m = Pm
(3.15)
η=
Pout Pe − PCu
=
Pin
Pe
(3.16)
Beispiel 3.4-1:
Wirkungsgrad von Gleichstrommaschinen:
Nennleistung 10 kW-Bereich ... 10 MW: Wirkungsgrad von ca. 80% ... 97% .
3.5 Der fremderregte Gleichstrommotor und der Nebenschluss-Motor
a) Gleichstrommotor am Batterienetz
In Bild 3.16 werden die Ankerwicklung (Plus- und Minusbürste, hier gemäß Norm IEC 60034
mit Klemmen A1, A2 bezeichnet) mit der in Serie geschalteten Wendepolwicklung
(Klemmen B1, B2) ebenso aus einem Gleichspannungsnetz U gespeist wie die Feldwicklung
der Erregerpole (Klemmen E1, E2). Feld- und Ankerwicklung sind parallel geschaltet
(Nebenschluss-Schaltung). Da über den Feldsteller-Widerstand der Feldstrom If
unabhängig vom Ankerstrom verstellt werden kann, wirkt diese Schaltung wie die eines
fremderregten Motors, bei dem die Spannung an der Feldwicklung aus einer getrennten
Spannungsquelle stammt.
"Anlassen" des Gleichstrommotors:
Beim Anlegen der Ankerwicklung an die Spannung U bei stillstehendem Motor (n = 0) ist
zunächst wegen (3.9) Ui noch Null. Dann fließt ein sehr hoher Ankerstrom Ia = U/Ra, da Ra
sehr klein ist (außer bei Kleinmotoren im Watt-Bereich). Er würde die Ankerwicklung durch
Überhitzung zerstören, so dass ein zusätzlicher Vorwiderstand im Ankerkreis („Anlasser“)
erforderlich ist, um den Ankerstrom auf den Wert des Nennstroms der Maschine zu
begrenzen. Dieser Ankerstrom Ia erzeugt mit dem Hauptfluss Φ das elektromagnetische
Drehmoment Me, das den Läufer (und die gekuppelte Lastmaschine) mit dem resultierenden
polaren Trägheitsmoment J beschleunigt, wenn das am Läufer wirkende
Beschleunigungsmoment MB > 0 ist. MB ist die Differenz zwischen Me und dem Lastmoment
Ms (Indizes: B: Beschleunigung, s: shaft (Welle)). Nach erfolgtem Hochlauf begrenzt die
induzierte Spannung den Ankerstrom; der Anlasserwiderstand kann kurz geschlossen werden,
um unnötige Verluste im Anlasserwiderstand zu vermeiden.
J
dΩ m
dn
= J ⋅ 2π
= M e − M s = kΦI a − M s = M B
dt
dt
(3.17)
Leerlaufdrehzahl:
Auf welche Drehzahl n läuft der Motor hoch? Die Drehzahl n ändert sich gemäß (3.17) nicht
mehr (dn/dt = 0), wenn MB = 0 ist, wenn also das elektromagnetische Moment gleich dem
Lastmoment ist: M e = M s . Der Motor ist dann in einem stationärem Zustand und läuft mit
konstanter Drehzahl, die wir mit (3.13) berechnen.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.13
a)
Teil: Elektrische Energiewandler
b)
Bild 3.16: Nebenschluss-Motor: (a) Schaltung, (b) Drehzahl-Strom-Kennlinie n(Ia) bzw. Drehzahl-DrehmomentKennlinie n(Me) bei konstanter Klemmenspannung U und Erregung If (beim fremderregten Motor Speisung der
Erregerwicklung von getrennter Spannungsquelle).
U = U i + I a Ra = kΩ mΦ +
Me
Ra
kΦ
Ωm =
M ⋅R
U
− e 2a = 2πn
kΦ (kΦ )
(3.18)
Dies ist eine Geradengleichung mit negativer Steigung, die als Ω m ( M e ) oder n( M e ) oder
n( I a ) dargestellt wird (Bild 3.16). Die Drehzahl ist bei konstanter Ankerspannung U
maximal („Leerlaufdrehzahl“ n0), wenn das Belastungsmoment Ms = 0 ist (Motorleerlauf).
n0 = Ω m0 /(2π )
Ω m0 = U /(kΦ )
(3.19)
Im idealen Leerlauf sind Me und der Ankerstrom Null. In realen Maschinen ist wegen des
stets vorhandenen Reibungsmoments und wegen der Ummagnetisierungsverluste im
geblechten Eisenkörper des Läufers, der im Magnetfeld des Hauptflusses rotiert, stets ein
kleines Bremsmoment vorhanden, so dass ein gleich großes elektromagnetisches Moment
zum Antreiben auch im Leerlauf nötig ist, dem gemäß (3.12) ein kleiner AnkerLeerlaufstrom entspricht. Die Abnahme der Drehzahl mit steigender Belastung ergibt sich
aus dem mit steigendem Ankerstrom zunehmenden OHM´schen Spannungsfall, der bei
konstantem U eine Verringerung der induzierten Spannung und damit der Drehzahl erzwingt.
b) Gleichstrommotor mit Stromrichter am Drehstromnetz
Um Gleichstrommotoren am Drehstromnetz betreiben zu können, muss das
Drehspannungssystem durch Gleichrichtung in eine Gleichspannung umgeformt werden. Im
Folgenden wird kurz das Prinzip der Gleichrichtung erläutert (Details: siehe Teil
„Stromrichtertechnik“). Siliziumbasierte Dioden für große Ströme und Spannungen werden
als Leistungsdioden für eine ungesteuerte Gleichrichtung verwendet (Bild 3.17a). Die Diode
leitet den Strom i bei positiver Spannung u von der Anode A zur Kathode K. Dabei tritt der
kleine Spannungsfall Uth (threshold, Schwelle) von ca. 0.7 V auf, der im Folgenden
vernachlässigt wird. Bei umgekehrter Spannungsrichtung sperrt die Diode den Stromfluss (i =
0, „rückwärts“ sperren) bis zur Durchbruchspannung –UD, die im Folgenden unendlich groß
angenommen wird (idealisierte Diode). Vier Dioden in der sogen. H-Brücken-Schaltung
(GRAETZ-Brücke) erzeugen aus einer Wechselspannung u(t) eine gleichgerichtete, aber
wellige Spannung ud(t) (Bild 3.17b, Bild 3.18). Der Spannungs-Mittelwert U d = (2 / π ) ⋅ Uˆ ist
unveränderlich. Er kann verändert werden, wenn anstatt der Dioden Thyristoren (Bild 3.19)
verwendet werden, die ebenfalls rückwärts sperren, aber auch vorwärts sperren, solange nicht
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.14
Teil: Elektrische Energiewandler
an dem gegenüber Dioden zusätzlichen Gate-Anschluss G gleichzeitig zur positiven
Spannung u zwischen A und K eine positive Gatespannung uG zwischen G und K angelegt
wird (Bild 3.19a). Wird die positive Gatespannung um die Zeit tα = ω/α später als die positive
Spannung u angelegt, sperrt der Thyristor bis zu diesem Zeitpunkt.
a)
b)
Bild 3.17: a) Schaltbild und Strom-Spannungs-Kennlinie der Diode, b) Gleichgerichtete Wechselspannung
a)
b)
Bild 3.18: GRAETZ-Gleichrichter-Schaltung: Gleichrichtung a) der positiven und b) der negativen
Wechselspannungs-Halbschwingung
a)
b)
Bild 3.19: a) Schaltbild des Thyristors, b) Einfache Gleichrichterschaltung mit einem Thyristor
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.15
Teil: Elektrische Energiewandler
Der gleichgerichteten Spannung fehlt dann der beginnende Teil der „Spannungs-Zeit-Fläche“
(Bild 3.19b). Durch diese „Anschnittssteuerung“ erfolgt eine über den „Zündwinkel“ α
gesteuerte Gleichrichtung mit einem nunmehr veränderlichen Spannungsmittelwert. Wenn der
Strom i durch Null geht, hört der Thyristor auf zu leiten bis zum Auftreten eines nächsten
positiven (u, uG)-Wertepaars. Vier Thyristoren als GRAETZ-Brücke erzeugen daher aus einer
Wechselspannung u(t) eine gleichgerichtete, aber wellige Spannung ud(t) (Bild 3.20) mit vom
Winkel α abhängigem Mittelwert. Bei α = 0 ist der Mittelwert am größten (wie bei der
ungesteuerten Diodengleichrichtung) 17b, Bild 3.18).
a)
b)
Bild 3.20: a) GRAETZ-Gleichrichter-Schaltung mit Thyristoren, b) Wechselspannung u, gleichgerichtete ud und
Laststrom i als welliger Gleichstrom im Lastwiderstand R
Wird das Schaltprinzip von Bild 3.20 auf ein Drehspannungssystem angewendet, erhalten wir
anstelle der „zweipulsig“ (je Periode) welligen Gleichspannung eine je Periode „sechspulsig“
wellige Gleichspannung (Bild 3.21). Für die Speisung der Ankerwicklung von
Gleichstrommaschinen
verwendet
man
hauptsächlich
diese
sechspulsigen
Gleichrichterschaltungen, die die drei verketteten Netzspannungen uUV, uVW, uWU zu einer
welligen Gleichspannung Ud umformen. Je Netzperiode T = 1/f (f: Netzfrequenz, ω = 2πf, ωT
= 360°) hat diese Spannung bei Gleichrichtung mit sechs Dioden sechs Sinuskuppen. Werden
statt der Dioden Thyristoren verwendet („Thyristor-Stromrichter“), so leiten diese erst,
wenn – wie erläutert - am Gate G der Thyristoren eine positive Gatespannung als
„Zündimpuls“ angelegt wird. Wird wie in Bild 3.20 der Zeitpunkt dieses „Zündens“
gegenüber dem natürlichen Leitbeginn der entsprechenden Diode um die Zeit tα (Zündwinkel
α = ωtα) verzögert, so ergibt sich der in Bild 3.21b dargestellte Spannungsverlauf, der bei α >
0 einen niedrigeren Gleichspannungsmittelwert Ud ergibt als beim Winkel α = 0° (α = 0°
entspricht der Diodengleichrichtung mit dem Mittelwert U d = (3 / π ) ⋅ Uˆ LL , uLL: verkettete
Wechselspannung zwischen L1-L2, L2-L3, L3-L1). Bei α = 90° ist der Spannungsmittelwert
Null, und bei α = 180° negativ maximal.
Fazit:
Mit einer Anschnittsteuerung kann aus einem Sinusdrehstromsystem eine zwischen positivem
und negativem Maximalwert veränderliche, aber "wellige" Gleichspannung erzeugt werden.
Da die Thyristoren nur in Vorwärtsrichtung von A nach K Strom leiten (“elektrisches
Ventil“), muss für Betrieb mit negativem Ankerstrom ein zweiter Thyristor-Stromrichter
antiparallel zum ersten an die Klemmen der Gleichstromankerwicklung angeschlossen
werden.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.16
a)
Teil: Elektrische Energiewandler
b)
Bild 3.21: Versorgung des fremderregten Gleichstrommotors mit variabler („welliger“) Gleich-Spannung aus
dem Drehstromnetz zur Veränderung der Drehzahl, a) Schaltung für sechspulsige Gleichrichtung, b) Spannungsverlauf bei sechspulsiger Gleichrichtung mit "Anschnittsteuerung" [14]
Bild 3.22: Drehzahl-Drehmoment-Kennlinien des fremderregten Gleichstrommotors für unterschiedliche
Klemmenspannungen und Erregungen (MN, nN: Nennmoment/-drehzahl, nm: Maximaldrehzahl)
Bereich Φ = konst.: Verstellen der Drehzahl über die variable Ankerspannung U.
Bereich U = konst.: Verstellen der Drehzahl über den variablen Fluss Φ.
Durch die Anschnittssteuerung wird der Gleichstrommotor mit veränderbarer
Ankergleichspannung U versorgt, so dass gemäß (3.18) die Drehzahl-DrehmomentKennlinien zueinander parallel verschoben werden (Bild 3.22, Bereich Φ = konst.). Damit ist
es möglich, jede beliebige Drehzahl zwischen Null und der positiven oder negativen
maximalen Leerlaufdrehzahl n0* (3.20) mit dem Gleichstrommotor zu fahren.
n0* =
U d ,max
2πkΦ
=
U d (α = 0°)
UN
=
2πkΦ
2πkΦ
(3.20)
Die maximale gleichgerichtete Spannung ist die Nennspannung des Motors UN. Negative
Drehzahlen erhält man durch Anlegen einer negativen Spannung –Ud, was einen Zündwinkel
α > 90° erfordert. Soll die Drehzahl größer als n0* werden, muss gemäß (3.20) der Hauptfluss
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.17
Teil: Elektrische Energiewandler
Φ verringert werden („Feldschwächbetrieb“: Der Feldstrom If wird über den die
Feldwicklung speisenden, separaten (Feld)-Stromrichter, der in Bild 3.21 nicht dargestellt ist,
verkleinert). Im Bild 3.22 ist n0* als Nenndrehzahl nN des Antriebs (Antrieb = Motor +
Stromrichter) definiert. Gemäß (3.18) neigt sich im Feldschwächbetrieb die n(M)-Gerade
umso stärker, je kleiner der Hauptfluss Φ wird (Bild 3.22: im Bereich U = konst.). Die
gestrichelt eingezeichneten Einhüllenden der Schar der n(M)-Geraden sind die Grenzkurven
für maximalen Ankerstrom und maximale Fliehkraftbelastung. Die maximale Drehzahl
nm ist z. B. durch die Fliehkraftbelastung der Läuferwicklung o. Ä. bedingt. Das maximale
Dauer-Drehmoment MN ergibt sich bei dem maximalen Wert des Ankerstrom Ia (z. B. der
Nennstrom IN). Im Feldschwächbereich sinkt dieses Drehmoment wegen der Rücknahme des
Flusses gemäß (3.12) und schnürt den Drehzahlbereich wegen Φ ~ U N / n, n > nN
hyperbolisch ( n ~ 1 / M , n > nN ) ein. Dabei bleibt die maximale Leistung P der Maschine
konstant, denn mit Ui ≅ UN, Pi ≅ PN , η ≅ 1 folgt:
M = k ⋅Φ ⋅ I N = k ⋅
UN
U I
P
⋅ IN = N N = N
2πk ⋅ n
2πn
2πn
P = 2πnM = PN = konst.
(3.21)
Der gleiche Feldschwächbereich kann auch bei negativer hoher Drehzahl gefahren werden. Es
ergibt sich ein Betrieb in allen vier Quadranten der Drehzahl-Drehmoment-Ebene (VierQuadranten-Betrieb): Im 1. und 3. Quadranten von Bild 3.22 ist die Leistung positiv; die
Gleichstrommaschine arbeitet als Motor. Im 2. und 4. Quadranten ist die Leistung negativ;
die Gleichstrommaschine arbeitet als Generator (Bild 3.25).
Motor:
P = 2πn ⋅ M = 2π (−n) ⋅ (− M ) > 0 ;
Generator:
P = 2πn ⋅ (− M ) = 2π (−n) ⋅ M < 0 .
Beispiel 3.5-1:
Drehzahlkennlinie eines Nebenschlussmotors:
U = 600 V, IN = 80 A, Φ = 7.1 mWb, k = 197.35, Ra = 0.15 Ω:
Leerlaufdrehzahl n0 = U /(2π ⋅ kΦ ) = 600 /( 2π ⋅ 197.35 ⋅ 0.0071) = 68.15 / s = 4089 / min
Nennmoment: M = kΦI N = 197.35 ⋅ 0.0071 ⋅ 80 = 112 Nm
M e ⋅ Ra
112 ⋅ 0.15
Nenndrehzahl: n N = n0 −
= 66.79 / s = 4007 / min
= 68.15 −
2
2π (kΦ )
2π ⋅ (197.35 ⋅ 0.0071) 2
Zugeführte elektrische Leistung: Pin = U ⋅ I N = 600 ⋅ 80 = 48 kW
Abgegebene mechanische Leistung: Pout = 2π ⋅ n N ⋅ M e = 2π ⋅ 66.79 ⋅ 112 = 47.04 kW
Verluste im Motor: Pd = Pin − Pout = Ra I N2 = 0.15 ⋅ 80 2 = 960 W, η = 47.04 / 48 = 98%
3.6 Wechselstrom-Kommutatormaschinen
Werden Anker- und Feldwicklung in Serie geschaltet, so entsteht die Reihenschluss- oder
Hauptschlussmaschine. In dieser Schaltung kann die Gleichstrommaschine als
Wechselstrom-Kommutatormaschine auch direkt am Einphasen-Wechselstromnetz
betrieben werden (Bild 3.23), denn Feldstrom und Ankerstrom sind nun identisch (Strom ia)
und haben daher keine Phasenverschiebung zueinander. Sie pulsieren mit der Netzfrequenz f.
Der als Wechselfluss erregte Hauptfluss Φ polt sich gleichzeitig mit dem Ankerstrom mit
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.18
Teil: Elektrische Energiewandler
Netzfrequenz um. Daher ist das Drehmoment stets positiv: M e = k ⋅ ia ⋅Φ = k ⋅ (−ia ) ⋅ (−Φ ) > 0 ,
wie auch Bild 3.23 zeigt.
Bild 3.23: Einphasen-Reihenschlussmotor: Unabhängig von der
Stromrichtung entsteht ein positives Moment, das mit doppelter
Netzfrequenz pulsiert [14].
M e (t ) = kΦˆ sin( 2πft ) ⋅ Iˆa sin(2πft ) =
Bild 3.24: Blechschnitt eines Universalmotors, zweipolig, für 40 000 /min [1]
k ˆ
ΦI a,eff ⋅ (1 − cos(2π 2 ft )) = M − Mˆ ≈ ⋅ cos(2ωt ) (3.22)
2
Das Moment pulsiert jedoch mit doppelter Netzfrequenz (3.22), was zu einer entsprechenden
Drehzahlschwankung und ggf. zu unerwünschten Schwingungsanregungen, verbunden mit
erhöhtem Geräusch, führen kann. Nur das mittlere Drehmoment
M = (k / 2 ) ⋅ Φˆ ⋅ I a ,eff
(3.23)
kann genutzt werden. Der Flussscheitelwert Φˆ darf nicht höher als der Wert Φ bei
Gleichstromspeisung sein, um das Eisen nicht zu hoch zu sättigen. Der Effektivwert des
Wechselstroms Ia,eff darf nicht höher als der entsprechende Gleichstromwert Ia = Ia,eff sein,
damit gleiche Verluste PCu = Ra I a2 = Ra I a2,eff auftreten. So ist das mittlere Drehmoment um
den Wert M / M e = (ΦˆI a,eff / 2 ) /(ΦI a ) = 1 / 2 = 0.71 kleiner ist als bei reinem
Gleichstrombetrieb und damit der Motor schlecht ausgenützt. Daher wird dieser Motor
vorzugsweise als kleiner Universalmotor (Bild 3.24, „universal“ = für Gleich- und
Wechselstrombetrieb geeignet) im Haushaltsbereich eingesetzt (z. B. in Staubsaugern mit
Drehzahlen bis 40 000 /min). Wegen der i. A. geringen Betriebsstundenzahl bei diesen
Kleinmotoren von ca. 500 … 1000 h während der Motorlebensdauer wird aus Kostengründen
auf Wendepole verzichtet und ein entsprechendes Bürstenfeuer zugelassen.
Trotz der genannten Nachteile war der Einphasen-Reihenschlussmotor mit großer Leistung
bis ca. 1980 als DER Wechselstrom-Lokomotivantrieb im Einsatz und ist es auf vielen ELoks älterer Baureihen auch heute noch (z. B. DB AG: Baureihe 140). Er ist bis zu großen
Leistungen bis ca. 1 MW je Motor entwickelt worden. Weil bei 50 Hz die Stromwendung
durch die zusätzliche induzierte Spulenspannung infolge des Wechsel-Hauptflusses dieser
Motoren elektrisch sehr problematisch ist (starke Funkenbildung, zu häufiger
Bürstenwechsel !), wurde das Bahnnetz in Deutschland, Österreich, Schweiz und
Skandinavien nicht für 50 Hz, sondern für die geringere Frequenz 50/3 = 16 2/3 Hz ausgelegt.
Dann ist diese zusätzliche induzierte Spannung nur 33%, und die Funken sind ausreichend
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
3.19
Teil: Elektrische Energiewandler
klein. Moderne Bahnantriebe werden mit den robusteren Asynchron-KurzschlussläuferMotoren, gespeist aus Umrichtern mit variabler Spannungsamplitude und Frequenz,
ausgeführt (Kapitel 4).
Beispiel 3.6-1:
Ausgeführter Einphasen-Reihenschluss-Lokomotivmotor :
ÖBB-Lokomotive Baureihe 1042, 4 Motoren á 1000 kW bei 1000 ... 1490/min (max.
Fahrgeschwindigkeit 150 km/h), Motor: 2p = 14 Pole, UN,eff = 465 V, I1-h,eff = 2400 A (1-h:
„Stundenstrom“ = jener effektive Strom, bei dem die Wicklung nach einer Stunde ihre
maximal zulässige Erwärmung erreicht). Dieser Motortyp benötigt selbstverständlich
Wendepole und eine Kompensationswicklung (siehe Vorlesung „Elektrische Maschinen und
Antriebe“). Wegen des pulsierenden Moments ist zwischen den Treibrädern und der MotorGetriebe-Einheit eine elastische Kupplung vorgesehen.
Beispiel 3.6-2:
Ausgeführte Drehstrom-Asynchron-Lokomotivmotoren :
a) DB-Lokomotive Baureihe 101: 4 Fahrmotoren zu je 1.6 MW: 4 x 1.6 = 6.4 MW für max.
Fahrgeschwindigkeit 230 km/h
b) Triebzug ICE 3: 16 Fahrmotoren zu je 500 kW: 16 x 0.5 = 8 MW, maximale
Fahrgeschwindigkeit: 330 km/h.
a)
b)
Bild 3.25: Stromrichtergespeiste Gleichstrommotoren für drehzahlvariablen Vier-Quadranten-Betrieb (Siemens
AG):
a) Vierpoliger Motor (100 kW bei 1500/min, nmax = 4000/min), Fremdlüfter mit kleinem Asynchronmotor als
Antrieb, um den GS-Motor unabhängig von dessen Drehzahl gleichmäßig zu kühlen
b) Einbau des Ankers eines 18-poligen Gleichstrommotors für ein Walzwerk, Zwillingsausführung ( = zwei
Motoren gekuppelt zur Leistungssteigerung), je Motor: Nennleistung 12.8 MW bei 90/min, nmax = 150/min
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.1
Teil: Elektrische Energiewandler
4. Drehfeldmaschinen
Bei den Drehfeldmaschinen (Asynchron- und Synchronmaschinen) rotiert das Magnetfeld
von Ständer und Läufer mit der konstanten Synchrondrehzahl nsyn („Drehfeld“).
- Asynchronmaschine: Der Läufer dreht asynchron zum Ständerdrehfeld, nämlich
langsamer (Motorbetrieb) oder schneller (Generatorbetrieb) als das Drehfeld.
- Synchronmaschine: Der Läufer („Polrad“) dreht gleich schnell (synchron) mit dem
Drehfeld. Im Generatorbetrieb läuft das Drehfeld um einen gewissen Winkel (Polradwinkel) räumlich dem Polrad nach, im Motorbetrieb eilt das Drehfeld um diesen Winkel
vor und zieht das Polrad nach.
4.1 Prinzipielle Erzeugung eines magnetischen Drehfelds
Bild 4.1: Ein rotierender Hufeisenmagnet erzeugt ein zweipoliges Drehfeld
[15]
Bild 4.2: Drehfelderzeugung mit ruhenden Wicklungen:
Drei räumlich um 120° versetzte Magnetspulen werden von drei
zeitlich um 120° phasenverschobenen Strömen gespeist [15].
Ein rotierender Hufeisenmagnet (Bild 4.1) erzeugt ein magnetisches Drehfeld. In Drehfeldmaschinen wird jedoch das magnetische Drehfeld ohne mechanisch rotierende Magnete
erzeugt. Im Prinzip werden drei räumlich um 120° versetzte Spulen auf Eisenkernen von drei
zeitlich um 120° zueinander phasenverschobenen Sinuswechselspannungen gespeist (Drehspannungssystem), die drei um 120° phasenverschobene Ströme (4.1) treiben (Drehstromsystem) (Bild 4.2). Dabei ist ϕ der Phasenwinkel zwischen Spannung und Strom.
iU (t ) = Iˆ ⋅ cos(ωt − ϕ )
,
iV (t ) = Iˆ ⋅ cos(ωt + 2π / 3 − ϕ )
i (t ) = Iˆ ⋅ cos(ωt + 4π / 3 − ϕ )
ω = 2πf ,
f = 1/T (ωT = 2π)
(4.1)
W
Beispiel 4.1-1: (Bild 4.3)
Lage des Drehfelds für zwei feste Zeitpunkte: (Phasenwinkel willkürlich ϕ = 4π/3 gesetzt):
iW = Iˆ, iU = iV = −iW / 2 = − Iˆ / 2
Zeitpunkt t = T / 3 : iV = Iˆ, iW = iU = −iV / 2 = − Iˆ / 2
Zeitpunkt t = 0 :
(4.2)
(4.3)
Zeitpunkt t = 0: Es ist iW maximal und doppelt so groß wie iU und iV, die entgegengesetzte
Polarität aufweisen. Daher ist das von Spule W erregte Magnetfeld doppelt so groß wie jenes
der Spulen U und V und von entgegengesetzter Polarität. In der vereinfachten Felddarstellung
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.2
Teil: Elektrische Energiewandler
Bild 4.3a treten daher 4 Feldlinien aus Spule W aus, wovon je 2 in Spule U und V münden.
Natürlich sind die B-Feldlinien geschlossene Kurven, was in Bild 4.3a nicht dargestellt ist.
Das Feld ist zweipolig. Der N-Pol wird von Spule W und der S-Pol gemeinsam von Spule U
und V gebildet.
Zeitpunkt t = T/3: Das Magnetfeld hat sich um räumlich 120° weiter gedreht (Bild 4.3b).
Wird diese Bewegung fortgesetzt, dann hat sich nach der Zeit T das Drehfeld um 360° weiter
gedreht, was bei einem zweipoligen Feld (2p = 2) einer Drehzahl
2p = 2:
nsyn = 1 / T = f
(4.4)
entspricht.
Fazit:
Es sind bei 2p = 2 die elektrische Frequenz f und die Drehfrequenz n = nsyn des Drehfelds
gleich groß.
Bild 4.3: Das Magnetfeld B dreht sich während der Zeit T/3 um räumlich 120°, wenn die Spulen U, V, W mit
Drehstrom (Frequenz f = 1/T) gespeist werden. Es induziert daher eine kurz geschlossene (drehbare, aber z. B.
ruhende) Läuferspule, so dass dort Strom fließt, der mit dem Drehfeld ein Drehmoment bildet [15].
4.2 Technische Erzeugung eines magnetischen Drehfelds
a) Feld eines Wicklungsstrangs:
In der Praxis werden die Magnetspulen so ausgeführt, dass in einem aus einzelnen Eisenblechen geschichteten zylindrischen Ständerblechpaket Nuten gestanzt sind, in die die
Spulenseiten der Spulen U, V, W gelegt sind (Bild 4.4a: Spule U). Die Bleche sind isoliert,
um die Wirbelströme zu unterbrechen. Das Blechpaket hat eine zylindrische Ausstanzung
(„Ständerbohrung“, Innendurchmesser dsi), in der der Läufer dreht. Diese Anordnung hat
den Vorteil, dass die geschlossenen B-Feldlinien den größten Teil des Wegs im Eisen
zurücklegen (Bild 4.5a). Der Läufer in Bild 4.5 ist vereinfacht als zylindrische Walze
dargestellt. Nur der Luftspalt δ hat einen nennenswerten Magnetisierungsbedarf (Hδ ≠ 0),
während das Eisen – wenn es ungesättigt ist – eine sehr große Permeabilität hat (hier:
Annahme μFe → ∞, daher HFe = 0). Der Durchflutungssatz längs der geschlossenen Kurve C
liefert für Hδ :
H • ds = H Fe s Fe + H δ 2δ
C
TU Darmstadt
= 2H δ δ = N ci = Θ
(4.5)
Institut für Elektrische Energiewandlung
Energietechnik
4.3
Teil: Elektrische Energiewandler
Die Luftspaltflussdichte Bδ(x) ist längs der Umfangskoordinate x rechteckförmig verteilt (Bild
4.5b), wenn die Nutbreiten unendlich schmal angenommen werden (b → 0), und hat die
Amplitude
Bδ = μ 0 H δ = μ 0
N ci
2δ
.
a)
(4.6)
b)
Bild 4.4: a) Spule U in zwei Nuten des Ständerblechpakets (Nc = 1) [14], b) Komplette Drehstromwicklung
(Siemens AG)
a)
b)
Bild 4.5: B-Feld einer Ständerspule: a) Axialer Schnitt, b) Feldverteilung längs des Umfangs x in der „Ständerbohrung“ in abgewickelter Darstellung
Bild 4.6: Pulsierendes Bδ-Feld einer Ständerspule bei Speisung mit Sinuswechselstrom i
Am Ort x der Nut mit der Nutdurchflutung ±Θ „springt“ die Luftspaltflussdichte um den Wert
±μ0Θ/δ. Dieses Spulenfeld pulsiert zeitlich sinusförmig, wenn der Spulenstrom i ein
Sinuswechselstrom (4.7) ist, behält aber seine räumliche Rechteckverteilung bei (Bild 4.6).
Die Symbole •, ⊗ in Bild 4.6 bedeuten, dass der Momentanstrom i aus der Blattebene heraus
(•) bzw. in die Blattebene hinein fließt (⊗), je nach dem ob er gerade positive oder negative
Polarität hat.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.4
Teil: Elektrische Energiewandler
N Iˆ
i (t ) = Iˆ ⋅ cos(2π ⋅ f ⋅ t ) : Amplitude pulsiert: Bδ (t ) = μ 0 c ⋅ cos(2π ⋅ f ⋅ t )
2δ
(4.7)
Die räumliche Verteilung des B-Felds soll möglichst sinusförmig sein, um Parasitäreffekte
wie z. B. magnetisch angeregte Geräusche zu vermeiden. Durch Verwendung von drei anstatt
einer U-Spule, die elektrisch in Serie geschaltet sind (Spulengruppe mit q = 3 Spulen,
q: „Lochzahl“ = Nuten pro Pol und Strang) entsteht eine Magnetfeldverteilung Bδ(x) im Luftspalt, die treppenförmig aussieht („Stufenhöhe“ ±μ0Θ/δ ). Diese „Treppe“ entsteht dadurch,
dass die Rechteckverteilungen der drei Einzelspulen, jeweils um einen Nutabstand (Nutteilung τQ, Bild 4.7) verschoben, addiert werden. Dabei steht den Hin- und Rückleitern der
drei Spulen insgesamt ein Drittel des Umfangs zur Verfügung. Die restlichen zwei Drittel sind
für die Spulengruppen V und W reserviert. Diese „Feldtreppe“ nähert sich besser an die
gewünschte Sinusform (Bδ,1) an als das Rechteckfeld einer einzigen Spule, wie Bild 4.7 zeigt.
Bild 4.7: Spulengruppe U mit q = 3 Spulen: Entstehung einer treppenartigen B-Feldverteilung Bδ(x) im Luftspalt,
deren FOURIER-Grundwelle die Amplitude Bδ,1 hat [14].
b) Summenwirkung aller drei Wicklungsstränge = Drehfelderzeugung:
Die Summenwirkung der drei „Wicklungsstränge“ U, V, W (in Bild 4.8a je eine Spule je
Strang U, V, W als einfachste Drehfeldwicklung), die mit einem Drehstromsystem gespeist
sind, erzeugt ein Drehfeld, wie im Folgenden gezeigt wird.
a)
b)
Bild 4.8: Eisenständer, mit einem Synchronmaschinen-Läufer dargestellt: Je eine Ständerspule für U, V, W, um
120° räumlich versetzt angeordnet, mit den Spulenanschlüssen U-X, V-Y, W-Z als Drehfeldwicklung; 1 Spule je
Polpaar und je Strang. Zwei Nuten je Polpaar und Strang, zwei Pole (N und S), 6 Nuten, 3 Stränge.
„Lochzahl“ q = 1: Nuten je Pol und Strang Ständer-Nutzahl: Qs = 6, Polzahl: 2p = 2, Strangzahl: m = 3
q = Qs /( 2 p ⋅ m) = 6 /( 2 ⋅ 3) = 1 , b) Klemmenbezeichnung und Strangspannungen
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.5
Teil: Elektrische Energiewandler
Das Ständerfeld dieser Drehstromwicklung (Bild 4.8b) wird im Luftspalt betrachtet für eine
konstante Luftspaltweite δ, unendlich hohe Eisenpermeabilität und eine speisendes
Drehstromsystem (Bild 4.9).
a)
b)
Bild 4.9: Drehstromsystem: a) im Zeitbereich, b) als komplexe Zeiger im Frequenzbereich
Bild 4.10: Ermittlung des Luftspaltfelds der Wicklung von Bild 4.8 (q = 1, m = 3) mit der Methode von Bild 4.5,
- 4.7 für ein Drehstromsystem für die Zeitpunkte t = 0 und t = T/3. Es entsteht ein stufenförmiges Wanderfeld.
Beispiel 4.2-1:
Zweipolige Drehfeldwicklung: 2p = 2, je eine Spule je Strang (Bild 4.8), q = 1. Es sind
m ⋅ q = 3 ⋅ 1 = 3 Spulen mit Hin- und Rückleiter (= 6 Nuten) vorhanden. Drei Nutteilungen τQ
ergeben daher eine Polteilung τp.
(i) Zeitpunkt t = 0 : iW = Iˆ, iU = iV = −iW / 2 = − Iˆ / 2
TU Darmstadt
(4.8)
Institut für Elektrische Energiewandlung
Energietechnik
4.6
Teil: Elektrische Energiewandler
Am Ort jeder Nut springt das Magnetfeld um den Wert ±μ0Θ/δ (Bild 4.10). Je nach
Zugehörigkeit zu Strang U, V, W hat die Nutdurchflutung Θ gemäß (4.8) folgende Werte:
ΘU = N ciU = − N c Iˆ / 2 = ΘV , ΘW = N ciW = N c Iˆ . So entsteht die Feldtreppe zum Zeitpunkt t =
0. Die Flächen unter der „Feldtreppe“ Bδ(x) sind proportional dem jeweiligen Fluss. Die
positiven und negativen Flächen, also N- und S-Polfluss, sind gleich groß.
(ii) Zeitpunkt T/3: Die Feldtreppe ist um 2τp/3 nach links gewandert, was man an der neuen
Lage der „neutralen Zone“ (Bδ = 0) erkennt.
Bild 4.11: Ermittlung des Luftspaltfelds für eine Wicklung mit q = 2, m = 3 analog zu Bild 4.10 für ein
Drehstromsystem für die Zeitpunkte t = 0, t = T/6 und t = T/3. Es entsteht ein stufenförmiges Wanderfeld, das
gegenüber Bild 4.10 (q = 1) sich besser an die erwünschte Sinusform annähert.
Beispiel 4.2-2:
Zweipolige Drehfeldwicklung: 2p = 2, Spulengruppen mit q = 2 Spulen: Es sind
m ⋅ q = 3 ⋅ 2 = 6 Spulen mit Hin- und Rückleiter (= 12 Nuten) vorhanden. Sechs Nutteilungen
τQ ergeben daher eine Polteilung τp.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.7
Teil: Elektrische Energiewandler
(i) Zeitpunkt t = 0 : iU = Iˆ, iV = iW = −iU / 2 = − Iˆ / 2
(4.9)
Am Ort jeder Nut springt das Magnetfeld um den Wert ±μ0Θ/δ (Bild 4.11). Je nach
Zugehörigkeit zu Strang U, V, W hat die Nutdurchflutung Θ gemäß (4.9) folgende Werte:
ΘU = N c iU = N c Iˆ , ΘV = N c iV = − N c Iˆ / 2 = ΘW und erregt die Feldtreppe zum Zeitpunkt t =
0. Die Flächen unter der „Feldtreppe“ Bδ(x) sind proportional zum jeweiligen Fluss pro Pol.
Die positiven und negativen Flächen, also N- und S-Polfluss, sind gleich groß.
(ii) Zeitpunkt T/12: Die Feldtreppe ist um 2τp/12 nach links gewandert, was man an der
neuen Lage der „neutralen Zone“ (Bδ = 0) erkennt, und hat ihre Form etwas geändert.
(iii) Zeitpunkt T/6: Die Feldtreppe ist um 2τp/6 nach links gewandert und hat wieder ihre
ursprüngliche Form.
Wesentlich ist, dass sowohl in Bild 4.10 als auch 4.11 die zugehörige FOURIERGrundwelle der Feldtreppe analog zu Bild 4.7 ihre Amplitude Bδ,1 zeitlich NICHT ändert
(Bild 4.13, Beweis: siehe Vorlesung „Elektrische Maschine und Antriebe“), so dass eine
gleichmäßig wandernde oder sich drehende Feld-Grundwelle erhalten wird, deren
Wandergeschwindigkeit bzw. Drehfrequenz in Abschnitt 4.3 ermittelt wird.
Bδ ( x, t ) = Bδ 1 ⋅ cos( x ⋅ π / τ p − ωt )
(4.10)
Dieses Grundwellenfeld (Bild 4.14) wird zur Energiewandlung, nämlich für ein zeitlich
konstantes elektromagnetisches Drehmoment Me, genutzt. Im Folgenden wird nur diese
Sinus-Grundwelle der treppenförmigen Feldverteilung weiter betrachtet. In Bild 4.11 ist
die Stromfolge iU, iW, iV, so dass das Feldmaximum in Richtung von +V zu +U wandert. Ein
Phasentausch (z. B. V gegen W) führt zur Stromfolge iU, iV, iW und bewirkt eine
Bewegungsumkehr des Felds. Weiter können die drei Wicklungsstränge U, V, W – je nach
Betriebserfordernis – in Stern oder in Dreieck geschaltet werden (Bild 4.12a, b), wobei die
Strangströme bei Dreieckschaltung 1 / 3 der Außenleiterströme sind.
a)
b)
c)
Bild 4.12: Anschluss der Drehfeldwicklung an das Drehstromnetz mit a) Sternschaltung, b) Dreieckschaltung.
c) Sechszonen-Anordnung pro Polpaar für die Spulengruppen einer vierpoligen Drehfeldmaschine N-S-N-S [1]
4.3 Drehfrequenz des Drehfelds
Während der Zeit T/6 ist das Feld in Bild 4.11 um 2τp/6 weiter gewandert bzw. in Bild 4.10
während T/3 um 2τp/3. Die Wandergeschwindigkeit vsyn ist folglich in beiden Fällen gleich.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
vsyn =
4.8
s 2τ p / 6 2τ p / 3
=
=
= 2 fτ p
t
T /6
T /3
Teil: Elektrische Energiewandler
.
(4.11)
Die zugehörige Drehfrequenz ist mit s = d siπ und t = 1 / n die Synchrondrehzahl n = nsyn.
nsyn =
vsyn
d siπ
=
vsyn
2 pτ p
=
f
p
.
(4.12)
In Bild 4.12c ist gegenüber Bild 4.8 die Wicklungsanordnung verdoppelt, so dass ein
vierpoliges Drehfeld entsteht. Nach der Zeit T ist das Drehfeld um 2τp (= halber Umfang)
weiter gewandert. Bei Verdopplung der Polzahl dreht das Drehfeld also nur halb so schnell
und bestätigt mit p = 2 die Formel (4.12).
Bild 4.13: Feld-Grundwelle der Feldverteilung aus Bild 4.10 bzw. 4.11 als Wanderwelle für zwei Zeitpunkte, die
um ein Viertel der Schwingungsperiode T des Drehstromsystems versetzt sind
Beispiel 4.3-1:
Drehfrequenz eines Drehfelds:
a) Vierpolige Wicklungsanordnung (Bild 4.13c): 2p = 4, elektrische Frequenz f = 200 Hz:
Synchrondrehzahl: nsyn = (200/2) = 100/s = 6000/min
b) wie a), jedoch Frequenz 50 Hz: nsyn = (50/2) = 25/s = 1500/min
c) wie b), jedoch zweipolig: nsyn = (50/1) = 50/s = 3000/min
Da die Minimalpolzahl 2p = 2 ist, kann bei Netzfrequenz 50 Hz (Europa, ...) oder 60 Hz
(USA, Japan, ...) das Drehfeld einer Drehfeldmaschine nicht rascher als mit 3000/min bzw.
3600/min drehen. Höhere Synchrondrehzahlen können nur durch künstliche Erhöhung der
Frequenz z. B. über einen Umrichter erreicht werden.
Beispiel 4.3-2:
Geschwindigkeit eines Wanderfelds:
Bei ebener Wicklungsanordnung entsteht ein Wanderfeld, das einen beweglichen Magneten
mitziehen kann, z. B. Linear-Synchronmotor der TRANSRAPID-Magnetschwebebahn:
fmax = 270 Hz, Polteilung τp = 258 mm: vsyn, max = 2 ⋅ 270 ⋅ 0.258 = 139.3 m/s = 500 km/h
4.4 Asynchronmaschinen
Einsatzgebiete von Asynchronmaschinen:
Asynchronmaschinen werden häufig direkt am Netz mit konstanter Statorfrequenz und
Spannungsamplitude betrieben. Im Motor- / Generatorbetrieb dreht der Läufer langsamer /
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.9
Teil: Elektrische Energiewandler
schneller („asynchron“ = nicht gleich schnell) wie das Drehfeld. Er dreht dabei mit nahezu
konstanter Drehzahl nahe der Synchrondrehzahl („Festdrehzahlantrieb“), z. B. als Motor für
Pumpen, Gebläse, Kompressoren, … und ist in sehr großer Stückzahl im Einsatz, zumeist in
der Bauweise des robuster “Normmotors” mit genormten Wellen- und Fußmaßen und
Oberflächenkühlung mit Kühlrippen (Bild 4.14a). Im Generatorbetrieb muss der Läufer von
einer Turbine schneller als das Drehfeld angetrieben werden und wird z. B. als Windgenerator
verwendet. Asynchronmaschinen mit Umrichterspeisung erhalten vom Umrichter ein StatorDrehspannungssystem mit veränderlicher Frequenz und Amplitude und sind dann
drehzahlveränderbar. Solche Motoren übernehmen viele Aufgaben in der Industrie (z. B.
Drahtziehmaschinen, …), als Aufzugsantriebe, in der Traktion,... (Bahn- und Straßenbahn,
Bild 4.14b), da sie robust sind.
a)
b)
Bild 4.14: a) Oberflächengekühlte Kurzschlussläufer-Asynchronmotor als „Normmotor“ mit Wellenlüfter unter
der Lüfterhaube (rechts im Bild, Siemens AG), b) Wassermantelgekühlte 100 kW-Käfigläufer-Fahrmotoren für
die U-Bahn (Elin EBG Motoren GmbH, Österreich)
4.4.1 Aufbau von Asynchronmaschinen
a)
b)
Bild 4.15: a) Querschnitt eines vierpoligen, oberflächengekühlten Kurzschlussläufer-Asynchronmotors mit
Aluminium-Druckguss-Käfig, Achshöhe 112 mm, für Betrieb am Frequenzumrichter bis 500 Hz, nmax =
15000/min, geschlossene Läufernuten, Verwendung als Hauptspindelantrieb in Werkzeugmaschinen (Siemens
AG), b) Läuferovalstab in der Läufernut (Querschnitt) mit vom Stabstrom erregten magnetischen LäuferNutstreufeld Bσ,Nut [14]
Der zylindrische Läufer trägt in Nuten eine dreisträngige Drehfeldwicklung, die an den
Klemmen kurzgeschlossen ist, oder einen Kurzschlusskäfig, was die häufigste Ausführung
ist. Dieser besteht aus in Nuten befindlichen Kupfer- oder Aluminiumstäben, die an den
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.10
Teil: Elektrische Energiewandler
Stirnseiten durch leitfähige Ringe miteinander verbunden (kurzgeschlossen) sind. Der Ständer
trägt in Nuten eine dreisträngige Drehfeldwicklung gemäß Abschnitt 4.2.
Beispiel 4.4.1-1:
Querschnitt einer vierpoligen Asynchronmaschine mit Käfigläufer (Bild 4.15a):
Qs = 36 Ständernuten, Qr = 28 Läufernuten, Polzahl 2p = 4,
Ständer: Strangzahl: m = 3, Lochzahl: q = 3, Ständer-Nutzahl: Qs = 2 p ⋅ m ⋅ q = 36 .
Sternschaltung der drei Wicklungsstränge: U, V, W: Netz-Anschlussklemmen, X, Y, Z bilden
den Sternpunkt.
Ständerfrequenz f = 500 Hz: Synchrondrehzahl n syn = f / p = 500 / 2 = 250 /s = 15000/min
4.4.2 Funktionsweise von Asynchronmaschinen
Motorbetrieb:
Wird an die Klemmen der Ständerwicklung U, V, W der still stehenden Asynchronmaschine
ein Drehspannungssystem mit einer elektrischen Ständerfrequenz (z. B. ωs/(2π) = fs = 50 Hz)
angelegt, so erregt das sich einstellende Drehstromsystem ein magnetisches Drehfeld. Dessen
Flussdichte im Luftspalt ist – bei ausschließlicher Betrachtung der Grundwelle – sinusförmig
verteilt mit der Amplitude Bs1. Dieses Drehfeld rotiert mit synchroner Drehzahl nsyn (bei z. B.
vierpoliger Wicklung und 50 Hz: 1500/min) und induziert in die stillstehende Läuferwicklung
wegen der dort stattfindenden Flussänderung eine Rotorspannung Ui = Ui,r (Bild 4.16a).
Fazit:
Der Läufer muss im Motorbetrieb langsamer als das Drehfeld drehen (n < nsyn), (er
„schlüpft“), damit eine Änderung der Läufer-Flussverkettung stattfindet und eine
Rotorspannung induziert wird ("Asynchronprinzip").
Definition des Schlupfs: s =
nsyn − n
(4.13)
nsyn
Beispiel 4.4.2-1:
Schlupf:
a) Läufer steht still: n = 0: s = 1
b) Läufer rotiert halb so schnell wie das Drehfeld: n = nsyn/2: s = 0.5
c) Läufer rotiert genau so schnell wie das Drehfeld: n = nsyn: s = 0
a)
b)
Bild 4.16: a) Zwei im Abstand einer halben Wellenlänge (= Polteilung) liegende Läuferstäbe bilden eine
Masche, in die das Ständerluftspaltfeld eine Spannung induziert, b) Die von der induzierten Spannung
getriebenen Läuferstabströme bilden mit dem Ständerfeld über die Lorentz-Kräfte F das Drehmoment Me [14].
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.11
Teil: Elektrische Energiewandler
Das Ständerdrehfeld ist sinusförmig verteilt (4.10): Bδ , s ( x, t ) = Bs1 ⋅ cos( x ⋅ π / τ p − ω ⋅ t ) . Zwei
um eine Polteilung τp distanzierte Läuferstäbe bilden eine Masche, die den Hauptfluss Φsh
umfasst. Bezüglich des Rotors ist die Kreisfrequenz auf Grund der Relativbewegung des
Ständerfelds zum Läufer ω = s ⋅ ωs = ωr bzw. f r = s ⋅ f s
τ p /2
2
Φ sh (t ) = Bδ ⋅ dA = l Bs1 cos( xπ / τ p − ωt ) ⋅ dx = ⋅ τ p ⋅ l ⋅ Bs1 ⋅ cos(ωt ) = Φ sh cos(ωr t ) (4.14)
A
π
−τ p / 2
und induziert die Rotorspannung (= Rotorhauptfeldspannung) in eine Läufermasche
( ω s = 2πf s , Bild 4.16a): ui , r (t ) = −dΦ sh (t ) / dt = −ωrΦ sh sin(ωr t ) .
Uˆ i , r = s ⋅ ω s ⋅Φ sh
(4.15)
Gl. (4.15) wird nun nochmals mit der Bewegungsinduktion ermittelt: Das Stator-Magnetfeld
bewegt sich mit der Tangentialgeschwindigkeit v syn , der Rotor und damit die Läuferstäbe mit
der Oberflächengeschwindigkeit v m , folglich das Stator-Magnetfeld relativ zu den Stäben mit
v = v syn − vm , v = s ⋅ v syn (Bild 4.16a). Die Stabgeschwindigkeit relativ zum Statorfeld ist
daher v rel = −v . Die in den Stäben induzierte Bewegungsfeldstärke E = v rel × Bδ = − v × Bδ
ist in Richtung der Stabachse orientiert und treibt in den über stirnseitige Ringe
kurzgeschlossenen Stäben Rotorstabströme IStab = Ir, die mit dem Ständerdrehfeld tangentiale
LORENTZ-Kräfte F je Stab bilden, die den Rotor in Richtung v m antreiben (Bild 4.16b). Die
LORENTZ-Kräfte bilden mit dem halben Läuferdurchmesser als Hebelarm das
l
elektromagnetische Drehmoment Me. Die induzierte Stabspannung ist U i = E ⋅ ds = v ⋅ Bδ l .
0
Das Statorfeld ist am Ort zweier Rotorstäbe im Abstand τ p (Bild 4.16a) entgegengesetzt
gleich groß Bδ, -Bδ, so dass die Maschenspannung als Differenz der zwei Stabspannungen
ui , r = v ⋅ Bδ l − v ⋅ (− Bδ )l = 2svsyn ⋅ Bδ l mit der Amplitude Uˆ i , r = 2svsyn ⋅ Bs1l und der
Frequenz f r = s ⋅ f s ist. Mit (4.11) und (4.14) folgt daraus unmittelbar (4.15).
4.4.3 Ersatzschaltbild der Asynchronmaschine
Die Rotor-Stabströme Ir mit der Frequenz fr erregen ihrerseits ein Läuferdrehfeld mit der
gleichen Polzahl 2p wie das Ständerfeld, das relativ zum Läufer mit der synchronen Drehzahl
nsyn, r = f r / p
.
(4.16)
dreht. Relativ zum Ständer dreht es aber mit der Synchrondrehzahl nsyn, da sich die
Läuferdrehzahl n zu nsyn,r addiert (4.17). Damit drehen Ständer- und Läuferdrehfeld gleich
schnell und überlagern sich zum resultierenden, sinusförmig verteilten Luftspaltfeld mit der
Amplitude B1, dessen Fluss pro Pol den resultierenden Hauptfluss (4.18) bildet.
nsyn, r + n = s ⋅ nsyn + (1 − s ) ⋅ nsyn = nsyn
Φh =
2
π
⋅τ p ⋅ l ⋅ B1
TU Darmstadt
(4.17)
(4.18)
Institut für Elektrische Energiewandlung
Energietechnik
4.12
Teil: Elektrische Energiewandler
Damit tritt eine augenfällige Analogie zum Transformator (Kapitel 2) auf:
- Primär- und Sekundärwicklung (= Ständer- und Läuferwicklung) sind elektrisch getrennt,
erregen aber einen gemeinsamen Hauptfluss Φh, der beide Wicklungen induktiv koppelt.
- Es existieren Streuflüsse in den Ständer- und Läufernuten (Bild 4.15b), aber auch um die
Spulenenden, die an der Kopplung zwischen den beiden Wicklungen NICHT teilnehmen.
Wie beim Transformator wirken sie als Streuinduktivitäten Lsσ, Lrσ .
- Es existiert je Strang eine Hauptinduktivität Lh durch magnetische Kopplung von
Ständer- und Läuferwicklung sowie eine Selbstinduktivität durch die Selbstinduktion des
Ständer-Haupt- und Streuflusses in der Ständerwicklung Ls (analog im Läufer: Lr).
- Die Windungszahlen von Primär- und Sekundärwicklungssträngen sind i. A. unterschiedlich, nämlich im Stator Ns Windungen je Strang und im Rotor Nr = ½ (halbe Masche = 1
Stab), so dass ein Übersetzungsverhältnis ü = Ns/Nr definiert werden kann.
Beispiel 4.4.3-1:
Windungszahlen einer vierpoligen Asynchronmaschine 2p = 4:
Ständerwicklung:
Windungen je Spule Nc = 5, Spulen pro Pol und Strang q = 3,
Windungszahl je Strang: N s = p ⋅ q ⋅ N c = 2 ⋅ 3 ⋅ 5 = 30 .
Käfigläuferwicklung: Ein Stab ist eine „halbe“ Windung: Nr = ½: ü = 60.
Trotzdem existieren einige wesentliche Unterschiede zum Transformator:
- Die Sekundärfrequenz (Rotorfrequenz) fr ist i. A. nicht gleich groß wie die
Primärfrequenz (Ständerfrequenz) fs.
- Die Rotorwicklung ist kurzgeschlossen.
- Im Flusspfad des Hauptflusses Φh liegt der mechanische Luftspalt δ, der die Hauptinduktivität Lh gegenüber jener des Transformators deutlich verringert.
Der „Magnetisierungsstrom“ ist analog zum Transformator definiert:
I m = I s + I ′r = I s + I r / ü
(4.19)
Er magnetisiert den Hauptfluss (4.18) im Luftspalt, dessen Verkettung Ψh in Bild 4.18 durch
die Hauptinduktivität Lh wiedergegeben wird.
Ψ
h
= N s Φ h = Lh ⋅ I m ⋅ 2
(4.20)
Gegenüber dem Transformator ist Lh wegen des Luftspalts (magnetischer Widerstand!)
kleiner und daher Im relativ groß, typisch 30% bis 50% vom Nennstrom IsN. Aus (4.15) folgt
für die induzierte Hauptfeldspannung des resultierenden Hauptflusses im Stator und im Rotor
als „innerer“ Quellenspannung:
U sh = jω s ⋅ N s Φ h / 2 = jω s Lh ( I s + I ′ r )
ω 1
U rh = jω r ⋅ N r Φ h / 2 = r ⋅ ⋅ U sh
⇔
ωs ü
(4.21)
U ′ rh = ü ⋅ U rh = s ⋅U sh
(4.22)
Dabei ist Urh die halbe Maschenspannung (= Stabspannung). Die Spannungsgleichungen je
Strang im Stator und Rotor mit Berücksichtigung der OHM´schen Widerstände Rs, Rr je
Strang und der Selbstinduktion der Streufelder gelten analog zum Transformator (Bild 4.17):
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.13
Teil: Elektrische Energiewandler
Stator:
U s = ( Rs + jω s Lsσ ) I s + U sh = ( Rs + jω s Lsσ ) I s + jω s Lh ( I s + I ′ r )
Rotor:
U ′ r = 0 = ( Rr′ + jω r Lr′σ ) I ′ r + U ′ rh = ( Rr′ + jsω s Lr′σ ) I ′ r + jsω s Lh ( I s + I ′ r )
Mit X statt ωL als Reaktanz und Division der Rotorspannungsgleichung durch s folgt:
U s = ( Rs + jX sσ ) I s + jX h ( I s + I ′r )
(4.23)
0 = ( Rr′ / s + jX r′σ ) I ′r + jX h ( I s + I ′r )
(4.24)
Bild 4.17: Ersatzschaltbild der Asynchron maschine
Strang (ohne Ummagnetisierungsverluste) [14]
Bild 4.18: wie Bild 4.17, jedoch mit Division durch s,
so dass das T-Ersatzschaltbild entsteht [14]
Rs, Rr´ : OHM´sche Widerstände von Ständer-, Läuferwicklung; (Index s, r: Stator, Rotor)
Xsσ, Xrσ´ : Streureaktanzen; Xh : Hauptfeldreaktanz; Us: primäre Strangspannung,
Is, Ir´ : primärer und sekundärer, auf die Primärseite umgerechneter Strangstrom
Den Gleichungen (4.23), (4.24) entspricht das T-Ersatzschaltbild je Strang (Bild 4.18). Im
Unterschied zum Ersatzschaltbild des Transformators ist die Sekundärspannung durch den
Kurzschluss in der Läuferwicklung kurzgeschlossen. Wie beim Transformator stellt sich der
Läuferstrom annähernd gegenphasig zum Ständerstrom ein („Durchflutungsausgleich“).
4.4.4 Stromaufnahme der Asynchronmaschine
Aus dem Ersatzschaltbild Bild 4.18 werden Ständerstrom Is und Drehmoment Me bei
vorgegebener Ständerspannung Us und Ständerfrequenz fs für jede Drehzahl n, also jeden
Schlupf s berechnet.
a) Leerlauf: n = nsyn:
Unbelastete Asynchronmaschine (Schlupf s = 0): R´r/s ist unendlich groß; es kann kein
Läuferstrom fließen. Daher ist das Drehmoment Null (Leerlauf).
Leerlaufstrom Is0 :
U s = ( Rs + jX sσ ) I s + jX h ( I s + 0) →
I s0 =
Us
Rs + j ( X sσ + X h )
(4.25)
b) Motorbetrieb: n < nsyn:
Bei Belastung mit einem Lastdrehmoment Ms sinkt die Drehzahl n, der Schlupf s steigt: s > 0.
Nun ist R´r/s endlich groß; es fließt ein Läuferstrom I´r .
Mit den Vereinfachungen
(i) Rs ≅ 0 und
(ii) Lsσ = 0 , Lr′σ → Ls′σ + Lr′σ = Lσ , gleichbedeutend mit einer Berücksichtigung des
gesamten Streuflusses auf der Läuferseite), folgt:
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.14
Teil: Elektrische Energiewandler
U s = jX h ( I s + I ′r ), 0 = jX h ( I s + I ′r ) + ( Rr′ / s + jX σ ) ⋅ I ′r
Us
I m = I s + I ′r = U s /( jX h ) , I ′r = −
Rr′ / s + jX σ
,
.
(4.26)
Der Betrag des Läuferstroms je Strang (mit der Abkürzung X σ = X sσ + X r′σ für die
gesamte Streureaktanz) ist
I r′ =
Us
( Rr′ / s ) 2 + X σ2
.
(4.27)
Gemäß I s = I m − I ′r wird der Ständerstrom je Strang bestimmt. Wegen I m ≈ I s 0 folgt aus
(4.26), dass bei kleinem Schlupf die Zeiger I m , I ′r näherungsweise aufeinander normal
stehen. Somit erhalten wir für den Betrag des Ständerstroms nach Pythagoras die
Stromaufnahme Is(s) der Asynchronmaschine (Bild 4.20).
I s ≈ I s20 + ( I r′ ) 2
(4.28)
Fazit:
Ausgehend vom Leerlaufstrom bei s = 0 nehmen mit steigendem Schlupf Ständer- und
Läuferstrom rapide zu, um bei großen Schlüpfen einem maximalen, nur durch die
Streureaktanzen begrenzten Maximalwert zuzustreben.
Beispiel 4.4.4-1:
Strom in Abhängigkeit der Drehzahl einer Asynchronmaschine: Bild 4.20
Der Leerlaufstrom zum Magnetisieren des Drehfelds ist mit 30% vom Nennstrom relativ
hoch und belastet das Netz induktiv. Der Anfahrstrom (s = 1) ist mit fast 4-fachem
Nennstrom sehr hoch und stellt bei großen Motoren eine hohe Netzbelastung dar.
4.4.5 Leistungsbilanz und Drehmoment der Asynchronmaschine
Die der Ständerwicklung zugeführte Leistung Pin der Asynchronmaschine im Motorbetrieb ist
mit den Stranggrößen Us, Is und dem Phasenwinkel ϕs zwischen Strom und Spannung
Pin = Pe = 3 ⋅U s ⋅ I s ⋅ cos ϕ s
.
(4.29)
Bei Vernachlässigung der Ummagnetisierungsverluste PFe im Ständerblechpaket treten statorseitig nur die Stromwärmeverluste PCu,s in der Statorwicklung auf.
PCu , s = 3Rs I s2
(4.30)
Die über das Drehfeld auf den Läufer übertragene Leistung Pδ heißt „Luftspaltleistung“
(„Drehfeldleistung“) und ist gemäß dem Ersatzschaltbild Bild 4.18 gleich der im Widerstand
R´r/s umgesetzten Wirkleistung.
Pδ = Pe − PCu , s = 3 ⋅ ( Rr′ / s ) ⋅ I r′ 2
TU Darmstadt
(4.31)
Institut für Elektrische Energiewandlung
Energietechnik
4.15
Teil: Elektrische Energiewandler
Die mechanische Leistung Pm, die der Motor an der Welle an die Arbeitsmaschine abgibt, ist
die Luftspaltleistung Pδ abzüglich der Stromwärmeverluste PCu,r in der Läuferwicklung
(4.32). Reibungsverluste und Ummagnetisierungsverluste im Läufer werden vernachlässigt.
Damit ergeben sich Merkformeln für die Läufer-Stromwärmeverluste PCu,r und die
mechanische Leistung Pm (4.33).
1
1
Pm = Pδ − PCu , r = Pδ − 3Rr′ I r′ 2 = 3 ⋅ − 1 ⋅ Rr′ I r′ 2 = − 1 ⋅ PCu , r
s
s
(4.32)
PCu , r = s ⋅ Pδ
(4.33)
Pm = (1 − s) ⋅ Pδ
Mit der mechanischen Kreisfrequenz Ωm (4.34) erhalten wir das elektromagnetische
Drehmoment Me aus der mechanischen Leistung Pm, ohne die Lorentz-Kraftberechnung
verwenden zu müssen.
Ω m = 2π ⋅ n = (1 − s) ⋅ Ω syn
(4.34)
Pm = Ω m M e = (1 − s ) ⋅ Ω syn M e
(4.35)
Durch Vergleich von (4.33) und (4.35) folgt für die Drehfeldleistung:
Pδ = Ω syn M e
(4.36)
Fazit:
Das mit synchroner Winkelgeschwindigkeit Ωsyn rotierende Drehfeld überträgt das
elektromagnetische Drehmoment Me und damit die Luftspaltleistung Pδ auf den Läufer.
4.4.6 Drehmoment-Drehzahl-Kennlinie der Asynchronmaschine
Aus der Luftspaltleistung (4.36) folgt für das Drehmoment Me in Abhängigkeit von
Klemmenspannung Us und Schlupf s im Rahmen der oben gemachten Näherung mit
Verwendung von (4.27), (4.33), (4.36):
Me =
Pδ
Ω syn
=
PCu , r / s
Ω syn
=
3Rr′ I r′ 2 / s
Ω syn
=
3U s2
⋅
Rr′ / s
Ω syn ( Rr′ / s ) 2 + X σ2
=
3U s2
2
⋅
sX
2Ω syn X σ Rr′
+ σ
sX σ
Rr′
(4.37)
Mit den Abkürzungen „Kippmoment“ Mb und „Kippschlupf“ sb gemäß (4.38) entsteht aus
(4.37) die KLOSS´sche Drehmoment-Merkformel (4.39) in Abhängigkeit vom Schlupf
bzw. über n = nsyn ⋅ (1 − s ) in Abhängigkeit von der Drehzahl.
Kippmoment: M b =
Me = Mb ⋅
2
sb
s
+
s sb
TU Darmstadt
3U s2
,
2Ω syn X σ
Kippschlupf: sb =
(KLOSS´sche Formel)
Rr′
Xσ
(4.38)
(4.39)
Institut für Elektrische Energiewandlung
Energietechnik
4.16
Bild 4.19: Drehmomentverlauf Me(s) (KLOSS´sche
Formel), strichliert: asymptotischer Verlauf für kleines
und großes s.
Teil: Elektrische Energiewandler
Bild 4.20: Strom- und Momentkennlinie einer
realen Asynchronmaschine im Motorbetrieb in
Abhängigkeit von der Drehzahl: Is(n/nsyn) = Is(1-s)
und M(n/nsyn) = M(1-s).
Gemäß (4.38) steigt das Drehmoment quadratisch mit der Spannung. Beim Absinken der
Netzspannung um z. B. 15% sinkt das Drehmoment auf 70%!
Motorbetrieb:
Das Drehmoment ist bei Schlupf Null ebenfalls Null, steigt mit steigendem Schlupf bis zu
einem Maximalwert (Kippmoment) an und sinkt dann wieder ab, um bei sehr großen
Schlüpfen wieder Null zu werden (Bild 4.19). Das Wellenmoment M ist im Motorbetrieb um
das Reibungsmoment kleiner als Me.
Generatorbetrieb:
Wird der Läufer rascher als das Drehfeld angetrieben (n > nsyn , s < 0), so wird der Schlupf
negativ. Das elektromagnetische Drehmoment wird negativ und bremst. Dem Läufer
mechanische Energie zugeführt: Pδ < 0, Pm < 0. Der Leistungsfluss erfolgt nun vom Läufer
zum Ständer und von dort in das Netz. Wenn die Ständerwicklung an der Netzspannung
angeschlossen ist, so kann sie aus dem Netz Strom zum Erzeugen des Ständerdrehfelds
aufnehmen (induktiver Blindstrom Is0) und gleichzeitig Wirkstrom als Generator ins Netz
liefern. Ohne das Netz als Blindstromquelle ist dieser Betrieb nicht möglich.
Beispiel 4.4.6-1:
Drehzahl-Drehmoment-Kennlinie eines typischen Asynchronmotors (Bild 4.20):
Betriebspunkt
Leerlauf
Nennpunkt
Kipp-Punkt
Anfahren
Schlupf
0
sN, , ca. 8%
sb , ca. 22%
1
Ständerstrom
Drehmoment
Leerlaufstrom I0 (ca. 0.3IN)
Null
Nennstrom IN
Nennmoment MN
Kippstrom Ib (ca. 2.5IN)
Kippmoment Mb (ca. 2MN)
Anfahrstrom I1 (ca. 4IN)
Anfahrmoment M1 (ca. 0.8MN)
Tabelle 4.1: Ausgezeichnete Betriebspunkte des Asynchronmotors
Fazit:
Der Betriebsbereich der Asynchronmaschine zwischen Leerlauf und Nennpunkt umfasst den
sehr engen Drehzahlbereich zwischen ca. 95% und 100% der Synchrondrehzahl. Die
netzgespeiste Asynchronmaschine ist daher als "Festdrehzahlantrieb" zu bezeichnen.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.17
Teil: Elektrische Energiewandler
4.5 Synchronmaschinen
4.5.1 Funktionsweise und Aufbau von Synchronmaschinen
Der Läufer hat ein konstantes Magnetfeld mit z. B. zwei Polen, das über Permanentmagnete
(„Permanenterregung“) oder Gleichstrom-Spulen („elektrische Erregung“) erzeugt wird (Bild
4.21). Bei der elektrischen Erregung erregt der Feldstrom If (Gleichstrom) dieses LäuferGleichfeld, das relativ zum Läufer ruht. Der Ständer hat wie die Asynchronmaschine eine i.
A. dreisträngige “Drehfeldwicklung”, die in Ständernuten liegt (Bild 4.22) und vom
Drehstromnetz gespeist wird. Der dort fließende (dreiphasige) Ständerstrom Is (Effektivwert,
Wechselstrom) erregt das zum Läuferfeld in der Polzahl passende z. B. zweipolige Drehfeld.
Es muss für eine Drehmomentbildung wie bei der Asynchronmaschine Läuferpolzahl und
Ständerpolzahl gleich groß sein. Während sich bei der Asynchronmaschine mit
Kurzschlusskäfig im Läufer automatisch die Polzahl des induzierenden Ständerfelds einstellt,
muss bei der Synchronmaschine konstruktiv für die gleiche Polzahl gesorgt werden. Die
tangentialen LORENTZ-Kräfte des Läufermagnetfelds auf stromdurchflossenen Leiter der
Ständerwicklung bewirken das elektromagnetische Drehmoment Me, das im Motorbetrieb den
Läufer SYNCHRON (“gleich schnell”) mit dem Ständerdrehfeld mitzieht. Dabei läuft die
Läuferfeldachse um einen konstanten Winkel („Polradwinkel“) der Drehfeldachse des
rotierenden Summenfelds aus Läufer- und Ständerfeld nach. Der Läufer kann nun sein
Drehmoment auf eine Lastmaschine (z. B. Pumpe) übertragen. Im Generatorbetrieb muss die
Läuferfeldachse vor der Drehfeldachse um den entsprechenden lastabhängigen Polradwinkel
vorlaufen. Dazu muss der Läufer mechanisch durch eine Turbine angetrieben werden. Das
nachlaufende Drehfeld übt auf den Läufer daher ein bremsendes elektromagnetisches
Drehmoment aus. In den genuteten Polschuhen der Läuferpole ist häufig ein KurzschlussKäfig (Dämpferkäfig) angeordnet (Bild 4.22), der im Synchronlauf stromlos ist (Schlupf s =
0). Dieser Dämpferkäfig soll Drehzahlschwankungen des Läufers, die nach jeder
Laständerung transient auftreten, dämpfen. Wenn dieser Käfig große Stabquerschnitte hat,
kann er auch als Anlaufkäfig dazu benutzt werden, dass die Synchronmaschine asynchron von
Null auf Synchrondrehzahl hoch laufen kann, ähnlich wie eine Asynchronmaschine (Bild
4.31).
Einsatzgebiete von Synchronmaschinen:
Synchronmaschinen werden sehr häufig als Kraftwerks-Generatoren direkt am Netz mit
konstanter Statorfrequenz betrieben. Sie sind DER Standard-Stromerzeuger bis hin zu größten
Einheitsleistungen von ca. 2000 MVA (z. B. im Kernkraftwerk Olkiluoto/Finnland), da sie
sowohl kapazitiv als auch induktiv betrieben werden können. Als kapazitiv wirksame
Betriebsmittel können sie die im Netz überwiegend induktive Blindleistung (z. B. durch
Asynchronmotoren, Transformatoren, …) kompensieren. Beachten Sie, dass
Asynchronmaschinen am Netz nur als induktiv wirkende Betriebsmittel einsetzbar sind
(„Magnetisierungsstrom“ bewirkt, dass der Ständerstrom der Ständerspannung nacheilt).
Wegen ihres Synchronlaufs sind Synchronmotoren bei Netzbetrieb absolute
Festdrehzahlantriebe und können z. B. als Kleinmotoren als Uhrenantriebe verwendet werden.
Häufig werden sie als Motoren aus Umrichtern mit Drehspannungssystemen veränderlicher
Amplitude und Frequenz versorgt und sind dann drehzahlveränderbar. Als drehzahlgeregelte
Motoren kleinerer Leistung im kW-Bereich mit Permanentmagnet-Läuferfelderregung werden
sie in Werkzeugmaschinen, Verpackungsmaschinen, als Roboterantriebe etc. eingesetzt. Als
umrichtergespeiste Großantriebe werden sie fallweise bei elektrischen Bahnen als
Traktionsantriebe verwendet (z. B. TGV, „1. Generation“), aber auch als Sonderantriebe bis
100 MW (z. B. als Antrieb für große Windkanalgebläse) oder als Schiffsantriebe (z. B. für
Kreuzfahrtschiffe, Bild 4.24a).
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.18
a)
b)
Teil: Elektrische Energiewandler
Bild 4.21: Bauarten von Synchronmaschinen (hier dargestellt für die einfachste Konfiguration: 2p = 2, ms = 3,
qs = 1, mr =1, qr = 1): a) Vollpolmaschine (Läufer-Drehwinkel γ, Läuferfeldachse d (Längsachse),
Läuferpollückenachse q (Querachse), b) Schenkelpolmaschine
Aufbau von Synchronmaschinen:
Der Ständer (Stator) der Synchronmaschine trägt in Nuten eine verteilte Drehstromwicklung wie bei der Asynchronmaschine. Der Läufer (Rotor, Polrad) trägt entweder
Permanentmagnete (i. A. bei kleinen Maschinen) oder eine gleichstromgespeiste
Erregerwicklung (Läuferwicklung. Polradwicklung) (i. A. bei größeren Maschinen). Die
Speisung dieser Wicklung erfolgt mit einer Gleichspannung (Erregerspannung Uf) z. B. aus
Gleichrichtern und prägt über zwei Schleifringe mit Kohlebürsten als Gleitkontakten den
Feldstrom If in die Läuferwicklung ein. Man unterscheidet bei der elektrisch erregten
Läuferwicklung zwei Läuferbauarten, den Vollpolläufer und den Schenkelpolläufer (Bild
4.21). Dementsprechend unterscheiden wir Vollpol- und Schenkelpol-Synchronmaschinen.
Bild 4.22: Axialschnitt der oberen Hälfte einer 12-poligen Schenkelpol-Synchronmaschine mit den bezeichneten
Maschinenteilen. Die Feldlinien des Hauptflusses sind gestrichelt dargestellt [14].
a) Vollpolmaschine:
Der Vollpolläufer besteht aus einem zylindrischen Blechkörper oder massivem Eisenzylinder
mit eingestanzten Nuten, in denen die Gleichstrom-Erregerwicklungs-Spulen liegen (Bild
4.21a: einfachster Fall: eine Erregerspule in zwei Nuten: Läufernutzahl Qr = 2p.qr = 2). Im
Allgemeinen ist besteht die Erregerwicklung aus mehreren konzentrisch angeordneten Spulen
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.19
Teil: Elektrische Energiewandler
pro Pol, die in mehreren Nuten als Spulengruppe verteilt ist (Bild 4.23a). Es ergibt sich
dadurch ein konstanter Luftspalt. Wegen der guten Fixierung der Wicklung in den
Läufernuten über Nutverschlusskeile wird die Vollpol-Bauart überwiegend für niedrigpolige
Synchronmaschinen (meist 2p = 2 und 4) bevorzugt verwendet, da bei diesen die Drehzahl n
= nsyn = f/p am höchsten ist (z. B. f = 50 Hz: n = 3000/min bzw. 1500/min), so dass die
Fliehkräfte auf die Läuferwicklung am höchsten sind. Bei Kraftwerksgeneratoren mit hohen
Leistungen sind die Läuferdurchmesser so groß, dass die Fliehkräfte die Läuferzähne abreißen
würden. Daher wird in diesen Fällen der Läufer aus massivem Stahl geschmiedet; die Nuten
werden ausgefräst. Diese Turbogeneratoren sind Vollpol-Synchronmaschinen, die von
thermischen Turbomaschinen (Gas- oder Dampfturbinen) angetrieben werden.
Beispiel 4.5.1-1:
Zweipoliger Turbogenerator:
n = 3000/min = 50/s, Polzahl 2p = 2(fs/n) = 2(50/50) = 2. Mechanisch maximal zulässiger
Läuferdurchmesser für 3000/min bei Verwendung hochfesten Stahls ca. dra = 1.1 m. Die
Umfangsgeschwindigkeit des Läufers ist dann mit n = nsyn: vsyn = d raπn = 1.1 ⋅ π ⋅ 50 = 173 m/s
= 622 km/h.
b) Schenkelpolmaschine:
Der Läufer („Polrad“) von Schenkelpol-Synchronmaschinen besitzt ausgeprägte Pole (Bild
4.21b), die von der Polradwicklung mit Gleichstrom erregt werden. Diese Bauart wird
überwiegend für hochpolige Synchronmaschinen (2p ≥ 4) verwendet (Bild4.22 u. 4.23b), da
dann die Drehzahlen und Fliehkräfte niedriger sind und die mechanisch aufwändige
Einzelpolbefestigung und Wicklungsfixierung einfacher und kostengünstiger zu realisieren
sind. Die Luftspaltweite ist nicht konstant, sondern weitet sich wie bei Gleichstrommaschinen
in der Pollücke stark auf.
a)
b)
Bild 4.23: a) 8-poliger Vollpolläufer mit qr = 3 Spulen pro Pol für ca. 10 MW, b) 14-poliger Schenkelpolläufer
für ca. 50 MW (Andritz Hydro, Österreich)
Beispiel 4.5.1-2:
Flusskraftwerks-Generator als Schenkelpolmaschine:
Im Flusskraftwerk sind nur geringe Stauhöhen möglich. Daher ist der Wasserdruck in der
Turbine niedrig, die Wasserturbinen drehen langsam, der Volumenstrom durch die Turbine ist
wegen der Breite des Flusses i. A. aber hoch. Zum Einsatz kommen langsam drehende
KAPLAN- und FRANCIS-Wasserturbinen mit Drehzahlen zwischen typisch 80/min bis
400/min. Um bei dieser niedrigen Drehzahl Spannungen mit 50 Hz in der Ständerwicklung
der Kraftwerksgeneratoren zu induzieren, müssen diese hochpolig sein, z. B.: fs = 50 Hz, n =
300/min = 5/s, Polzahl 2p = 2(fs/n) =2(50/5) = 20.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.20
Teil: Elektrische Energiewandler
Beispiel 4.5.1-3:
Synchron-Generator im Speicherkraftwerk:
In Speicherkraftwerken herrscht auf Grund der großen Stauhöhe des Wassers ein hoher
Gefälledruck in der Turbine, so dass diese rasch dreht. Dafür ist der Volumenstrom in der
Turbine eher klein. Zum Einsatz kommen schnell drehende PELTON-Wasserturbinen mit
Drehzahlen zwischen typisch 500/min bis 1000/min. Dazu passende Schenkelpol-Generatoren
sind eher niederpolig (Bild 4.24 b), z. B. für fs = 60 Hz (USA, Japan, …), n = 900/min = 15/s,
Polzahl 2p = 2.fs/n =2.60/15 = 8.
a)
b)
Bild 4.24: a) Schenkelpol-Synchronmaschinen als umrichtergespeiste Propeller-Direktantriebe für das
Kreuzfahrtschiff „MS Elation“, 2x14 MW, 0 … 150/min (ABB Finnland), b) Einbau des 10-poligen 60 MVASchenkelpolläufers im Speicherkraftwerk Kaprun, Österreich (Andritz Hydro)
a)
b)
Bild 4.25: Umrichtergespeiste Schenkelpol-Synchronlinearmaschine als Antrieb der Magnetschwebebahn
TRANSRAPID: a) Prinzipdarstellung des Linearantriebsmotors als gedankliche Abwicklung der
Drehfeldwicklung einer rotierenden Maschine als Primärteil, das fest in die Fahrbahn integriert ist. Das
Sekundärteil (Gleichstrompole) ist ausgeschwenkt dargestellt. b) Sekundärteil: Die Gleichstrompole des
Linearmotors sind gleichzeitig die Tragmagnete für das magnetische Schweben. Zusätzlich werden seitliche
Führungsmagnete für die Spurhaltung benötigt (Thyssen Krupp, Deutschland)
Beispiel 4.5.1-4:
Umrichtergespeister Synchron-Linearmotor mit Langstator als Wanderfeldwicklung in der
Fahrbahn für Magnetschwebebahn Transrapid (Bild 4.25):
Die drei Wicklungsstränge U, V, W der Wanderfeldwicklung sind als Aluminium-Kabel mit
einer Windung pro Polpaar und Strang in die Fahrbahn zu beiden Seiten des Fahrzeugs in
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.21
Teil: Elektrische Energiewandler
Blechpaketen (Eisenbreite 185 mm) mit offenen Nuten verlegt. Dieser Linear-SYNCHRONMotor hat eine Polteilung von 258 mm. Etwa 180 Pole passen unter ein Fahrzeug von 46 m
Länge. Eine Baueinheit umfasst vier Pole mit einer Gesamtlänge von 4 x 258 = 1032 mm. Zur
halbautomatisierten Verlegung der Wicklung entlang der Strecke sind 24 Einheiten zu einer
Sektion mit 24 768 m zusammengefasst. Mehrere Sektionen ergeben einen Speiseabschnitt
für den Umrichter, welche bei der Schwebebahn in Shanghai, China Längen zwischen 0.9 ...
5.0 km aufweisen. Die Tragmagnete (Bild 4.25b) ziehen von unten bei einem Luftspalt von
ca. 10 ...13 mm (geregelt über If) das Fahrzeug an den Stator des SYNCHRON-Linearmotors,
der in der Trasse liegt. Dadurch erhält das Fahrzeug OBERHALB der Trasse eine
Bodenfreiheit von 150 mm.
4.5.2 Ersatzschaltbild und Zeigerdiagramm der Synchronmaschine
Wird in Bild 4.22 eine geschlossene B-Feldlinie als Kurve C für die Anwendung des
Durchflutungssatzes verwendet, die die Erregerdurchflutung 2Nf,PolIf zweier benachbarter Pole
umschlingt, so ergibt dies bei Vernachlässigung der geringen magnetischen Feldstärke im
Eisen HFe ≈ 0 und Berücksichtigung des minimalen Luftspalts in Polmitte δmin die maximale
Luftspaltfeldstärke und Luftspaltflussdichte in Polmitte Hδ,p und Bδ,p.
H
⋅ ds ≈ 2 Hδ , pδ min = 2 ⋅ N f , Pol I f
C
Bδ , p = μ0 N f , Pol I f / δ min
(4.40)
Der Läuferfluss pro Pol Φp wird analog zur Gleichstrommaschine aus der
Flussdichteverteilung pro Pol im Luftspalt Bδ,p(x) gemäß (4.41) berechnet. Da die
Schenkelpole sehr ähnlich geformt sind wie die Gleichstrommaschinen-Erregerpole, ist auch
die Luftspaltdichteverteilung Bδ,p(x) sehr ähnlich (vgl. Bild 3.2), so dass analog zu (3.2) eine
ideelle Polbedeckung αe definiert werden kann. Mit der Polteilung τp, der axiale
Maschinenlänge l und der maximale Läuferfeld-Flussdichte Bδ,p in Polmitte erhalten wir
τp
Φ p = l Bδ , p ( x)dx = α e ⋅ τ p ⋅ l ⋅ Bδ , p
.
(4.41)
0
Das Läuferfeld wird gemäß Bδ,p(If) vom Läufer-Gleichstrom If erregt und ist mit den Spulen
der Ständerwicklung verkettet: Ψp = NsΦp. Das mit der Drehzahl nsyn rotierende Polrad
bewirkt eine annähernd sinusförmige zeitliche Änderung dieser Flussverkettung
Ψ p (t ) = N sΦ p (t ) = N sΦ p ⋅ sin(2π ⋅ f s ⋅ t ) mit der Frequenz f s = nsyn ⋅ p = ωs /(2π ) . Es wird
daher in der Ständerwicklung je Strang die Spannung („Polradspannung“) Up mit dieser
Frequenz als „innere“ Quellenspannung der Statorwicklung je Strang induziert. Bei Änderung
des Feldstroms If ändert sich auch diese Polradspannung Up.
U p = jω s ⋅ N s Φ p / 2
(4.42)
Beispiel 4.5.2-1:
Spannungsinduktion je Strang bei der Ständerwicklung von Bild 4.21:
qs = 1: Windungszahl je Strang Ns = Spulenwindungszahl Nc, da nur eine Spule je Strang
vorhanden ist.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.22
Teil: Elektrische Energiewandler
Verkettung des Läuferflusses mit Spule U: Ψ p,U (t ) = N s ⋅ Φ p ⋅ sin(2π ⋅ f s ⋅ t ) . Die
Verkettungen mit Strang V und W sind wegen der räumlich versetzten Anordnung um 2τp/3
und 4τp/3 um 120° bzw. 240° phasenverschoben:
Ψ p ,V (t ) = N s ⋅ Φ p ⋅ sin(2π ⋅ f s ⋅ t − 2π / 3) , Ψ p,W (t ) = N s ⋅ Φ p ⋅ sin(2π ⋅ f s ⋅ t − 4π / 3) .
Die induzierte Spannung je Strang bei offener Ständerwicklung und rotierendem Läufer
(Leerlauf) ist die Polradspannung; z. B. im Strang U:
ui ,U (t ) = − dΨ p,U (t ) / dt = −ωs ⋅ N s ⋅ Φ p ⋅ cos(ωs ⋅ t ) = − 2 ⋅ U p ⋅ cos(ωs ⋅ t ) .
Fazit:
Das rotierende magnetisierte Polrad induziert in der Ständerwicklung das
Drehspannungssystem der Polradspannung mit den jeweils um 120° phasenversetzten
Polrad-Strangspannungen mit dem Effektivwert U p = ωs ⋅ N sΦ p / 2 .
Die Ständerwicklung wird entweder in Stern oder Dreieck geschaltet, wobei bei Generatoren
die Sternschaltung bevorzugt wird, denn es kann dann kein Nullstromsystem fließen. Die
Ständerwicklung wird an das Drehstromsystem des Netzes mit der Netzspannung Us je Strang
(bei fs = fNetz) angeschlossen. Die Differenz Up – Us treibt in der Ständerwicklung den
Ständerstrom je Strang Is. Dieses Ständer-Drehstromsystem erregt (wie in der
Asynchronmaschine) seinerseits ein Drehfeld Bδ,s, das wegen fs = p.nsyn gleich schnell wie Bδ,p
rotiert. Beide Drehfelder überlagern sich zum resultierenden Drehfeld Bδ mit der Amplitude
Bδ,1 (Index 1: FOURIER-Grundwelle der Feldverteilung). Das Drehfeld Bδ,s induziert den
Läufer nicht, da dieser synchron mit dem Drehfeld dreht und daher keine Flussänderung
erfährt. Es induziert aber in die Ständerwicklung durch Selbstinduktion über die
Hauptinduktivität Lh wie bei der Asynchronmaschine die Spannung jωsLhIs. Die
unvermeidlichen Streuflüsse z. B. in den Ständernuten (vgl. Bild 4.15b) tragen über die
Streuinduktivität Lsσ ebenfalls zur Selbstinduktionsspannung bei. Damit ergibt sich mit
Berücksichtigung des OHM´schen Spannungsfalls die Spannungsgleichung je
Ständerstrang (4.43).
U s = ( Rs + jω s Lsσ + jω s Lh ) ⋅ I s + U p
(4.43)
Die Polradspannung Up kann als über If steuerbare Quellenspannung aufgefasst werden. Die
resultierende Reaktanz je Strang (4.44) heißt „synchrone Reaktanz“ Xd und kann gemeinsam
mit Rs als „Innenwiderstand“ des als Spannungsquelle wirkenden Synchrongenerators
angesehen werden. Das Ersatzschaltbild je Strang ist in Bild 4.26 mit positiven
Richtungspfeilen für das Verbraucher-Zählpfeilsystem dargestellt.
X d = X h + X sσ = ω s Lh + ω s Lsσ
(4.44)
Das zugehörige Zeigerdiagramm in Bild 4.27 hat zu einem gegebenem Zeigerpaar Is und Us
(mit dem dazwischen liegenden Phasenwinkel ϕ) im rechten Winkel zu Is den Spannungsfall
an der Streureaktanz jXsσIs und parallel zu Is den OHM´schen Spannungsfall. Die Summe aus
Up und jXhIs stellt die induzierende Wirkung des resultierenden Luftspalt-Drehfelds Bδ in der
Ständerwicklung dar (Gegeninduktion von Bδ,p und Selbstinduktion von Bδ,s) und ist folglich
– analog zur Asynchronmaschine – die Hauptfeldspannung Uh .
U h = jω s ⋅ N s Φ h / 2 ,
TU Darmstadt
Φ h = α e ⋅ τ p ⋅ l ⋅ Bδ ,1
αe = 2 / π
(4.45)
Institut für Elektrische Energiewandlung
Energietechnik
4.23
Teil: Elektrische Energiewandler
Aus dem Zeigerdiagramm ist ersichtlich, dass über die Größe und Lage von Up (über
verändertes If) bei konstanter Spannung Us die Lage von jXhIs und damit von Is verändert
werden kann. Im Bild 4.27 ist Is zur Spannung Us voreilend; die Maschine verhält sich
demnach kapazitiv, obwohl nirgends Kapazitäten vorhanden sein („übererregter Betrieb“).
Dabei ist Up deutlich größer als Us, was einen hohen Erregerstrom If bedingt.
Fazit:
Die Synchronmaschine wirkt im übererregten Zustand als kapazitiver Verbraucher, obwohl
sie nur aus OHM´sch-induktiven Komponenten besteht.
Bild 4.26: Ersatzschaltbild der SynchronVollpolmaschine je Strang
Bild 4.27: Zeigerdiagramm je Strang der SynchronVollpolmaschine im Verbraucher-Zählpfeilsystem:
Übererregt (kapazitiv), Generatorbetrieb
4.5.3 Generator- und Motorbetrieb – Bedeutung des Polradwinkels
Der Winkel zwischen Up und Us heißt Polradwinkel ϑ und wird im mathematisch positiven
Sinn von Us nach Up positiv gezählt. Er ist in Bild 4.27 positiv; das ist Generatorbetrieb. Der
Winkel ϕ ist negativ, aber dem Betrag nach größer als 90°. Dies ergibt gemäß (4.46) eine
negative elektrische Wirkleistung Pe, somit im Verbraucher-Zählpfeil-System eine erzeugte
Leistung, was den Generatorbetrieb bestätigt.
Pe = 3 ⋅U s ⋅ I s ⋅ cosϕ < 0 , wenn ϕ > 90°
(4.46)
Generatorbetrieb: Der im Generatorbetrieb positive Winkel ϑ entsteht, indem das Polrad
mit dem Polradfluss Φp durch Antreiben räumlich dem resultierenden Drehfeld mit dem
Hauptfluss Φh vorauseilt. Es induziert die Ständerwicklung mit einer voreilenden Phasenlage.
Das negative elektro-magnetische Drehmoment Me versucht, das Polrad abzubremsen und
damit ϑ zu verkleinern. Bei vernachlässigtem Widerstand Rs ≈ 0 tritt bei ϑ = 0 kein
Drehmoment auf: Me = 0.
Motorbetrieb: Im Motorbetrieb eilt Up der Spannung Us um den Winkel ϑ nach (Bild 4.30).
Der Polradwinkel ist negativ. Das Drehfeld, erregt durch die aus dem Netz gespeisten
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.24
Teil: Elektrische Energiewandler
Ständerströme, zieht das Polrad mit sich und treibt so den Läufer an. Das elektromagnetische
Drehmoment Me ist positiv und kann eine gekuppelte Arbeitsmaschine antreiben.
4.5.4 Drehmoment, Wirk- und Blindleistung der Synchronmaschine
Aus dem Zeigerdiagramm Bild 4.27 wird bei Vernachlässigung von Rs das Diagramm in Bild
4.28, aus dem die Leistung der Synchronmaschine berechnet wird, ohne magnetische Kräfte
betrachten zu müssen. Gemäß Bild 4.28 ergibt sich über die geometrische Beziehung (4.47)
die elektrische Wirkleistung P in Abhängigkeit von ϑ (4.48).
U p sin ϑ = X d I s sin(ϕ −
π
) = − X d I s cos ϕ
2
− U p sin ϑ
U sU p
sin ϑ
Pe = 3U s I s cos ϕ = 3U s ⋅
= −3
Xd
Xd
(4.47)
(4.48)
Da die Maschine verlustlos betrachtet wurde (Rs = 0), müssen elektrische und mechanische
Leistung gleich groß sein: Pe = Pm .
Pe = 3U s I s cosϕ = Pm = Ω syn M e = −3
U sU p
Bild 4.28: Zeigerdiagramm der SynchronVollpolmaschine bei vernachlässigtem Ständerwiderstand (Rs = 0) für generatorischen
Betrieb
Xd
sin ϑ →
M e = −3
U sU p
Ω syn X d
sin ϑ
(4.49)
Bild 4.29: Elektromagnetisches Drehmoment der Synchronmaschine gemäß (4.49) bei Betrieb am „starren“ Netz
(Us = konst.) und konstanter Erregung (Up = konst.) in
Abhängigkeit der Belastung (= des Polradwinkels ϑ)
Die Merkformel (4.49) für das elektromagnetische Drehmoment der Vollpolmaschine, dargestellt in Bild 4.29, zeigt, dass bei einem Polradwinkel von ±90° das Drehmoment maximal
wird und dann wieder abnimmt. Stabil arbeitet die Maschine nur innerhalb des Winkelbereichs -90° < ϑ < 90°. Wird das „synchrone Kippmoment“ Mp0 (4.50) überschritten,
„kippt“ der Läufer aus dem Synchronlauf und rotiert asynchron. Das Kippmoment kann durch
Erhöhung der Polradspannung (= Erhöhung des Feldstroms) erhöht werden.
M p0 = 3
U sU p
Ω syn X d
TU Darmstadt
(4.50)
Institut für Elektrische Energiewandlung
Energietechnik
4.25
Teil: Elektrische Energiewandler
Bild 4.30: Betriebszustände der Vollpolsynchronmaschine im VZS [14]
- Generator bzw. Motor: Wirkleistung negativ bzw. positiv
- Maschine übererregt: Maschine ist kapazitiver Verbraucher und kann damit andere induktive Verbraucher
mit Blindleistung „versorgen“.
- Maschine untererregt: Maschine ist induktiver Verbraucher und kann damit andere kapazitive Verbraucher
mit Blindleistung „versorgen“.
Über- und untererregter Betrieb:
Die Blindleistung Q (4.51) ist in Bild 4.27 negativ, die Maschine mithin ein kapazitiver
Verbraucher. So werden viele Generatoren übererregt betrieben, weil viele Netzverbraucher
induktiv sind (z.B. Drosseln, Asynchronmotoren, ...) und daher für den ausgeglichenen
Blindleistungshaushalt des Netzes kapazitive Verbraucher zur Kompensation der induktiven
Blindleistung benötigt werden. Der übererregte Betrieb ist durch eine große
Polradspannung und damit einen hohen Erregerstrombedarf If gekennzeichnet.
Bei Verringerung von Up wird der Leistungsfaktor positiv, der Strom Is eilt Us nach (Bild
4.30), und die Maschine wird ein induktiver Verbraucher (untererregter Betrieb, niedriger
Erregerstrom If). In Bild 4.30 und Tabelle 4.2 sind die vier wesentlichen Betriebszustände
„Generator/Motor“, „über-/untererregt“ im Verbraucher-Zählpfeil-System dargestellt.
Q = 3U s I s sin ϕ
TU Darmstadt
(4.51)
Institut für Elektrische Energiewandlung
Energietechnik
4.26
Teil: Elektrische Energiewandler
Fazit:
Die Synchronmaschine hat den großen Vorteil, dass über die Erregung If die Blindleistung Q
induktiv oder kapazitiv eingestellt werden kann, was sie zum idealen Kraftwerksgenerator
macht, der den jeweiligen Netzerfordernissen gemäß betrieben werden kann.
Blindleistung:
INDUKTIV
KAPAZITIV
KAPAZITIV
INDUKTIV
Erregerstrom If klein Erregerstrom If groß Erregerstrom If groß Erregerstrom If klein
Polradspannung Up
Polradspannung Up
Polradspannung Up
Polradspannung Up
klein
groß
groß
klein
Untererregung
Übererregung
Übererregung
Untererregung
Is eilt Us nach
Is eilt Us vor
Is eilt Us vor
Is eilt Us nach
Phasenwinkel ϕ > 0
Phasenwinkel ϕ < 0
Phasenwinkel ϕ < 0
Phasenwinkel ϕ > 0
Wirkleistung:
GENERATOR
GENERATOR
MOTOR
MOTOR
Polradwinkel ϑ > 0
Polradwinkel ϑ > 0
Polradwinkel ϑ < 0
Polradwinkel ϑ < 0
Up eilt Us vor
Up eilt Us vor
Up eilt Us nach
Up eilt Us nach
Phasenwinkel ϕ >π/2 Phasenwinkel ϕ >π/2 Phasenwinkel ϕ ≤π/2 Phasenwinkel ϕ ≤π/2
Tabelle 4.2: Die vier wesentlichen Betriebszustände der Synchronmaschine
a)
b)
Bild 4.31: Schenkelpol-Synchronmaschinen-Rotoren: a) 10-poliger Motorläufer, durchgehende Dämpferringe
(Siemens AG), b) 14-poliger Generatorläufer, Dämpferstäbe in den Polschuhen erkennbar (Lloyd Dynamowerk)
4.6 Turbinen als Synchrongeneratorantriebe (Übersicht) (kein Prüfungsstoff!)
Folgende typische Großgenerator-Einsatzfälle lassen sich klassifizieren:
- Wasserkraftgeneratoren,
- Dampf- und Gasturbinen-betriebene Turbogeneratoren.
4.6.1 Turbinen für Wasserkraftgeneratoren
Wasserturbinen drehen im Vergleich zu thermischen Turbomaschinen relativ langsam.
a) Im Flusskraftwerk herrscht niedriger Wasserdruck und hoher Volumenstrom: Dafür werden
KAPLAN- u. FRANCIS-Turbinen mit Drehzahlen n ca. 80/min bis ca. 400/min eingesetzt.
b) In Speicherkraftwerken herrscht hoher Wasserdruck bei kleinem Volumenstrom: Dafür
werden PELTON-Turbinen mit Drehzahlen n ca. 500/min bis 1000/min eingesetzt.
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.27
Teil: Elektrische Energiewandler
Genauer wird zwischen Hochdruck-, Mitteldruck-, und Niederdruckwasserkraftwerken
unterschieden. Hochdruckkraftwerke umfassen Speicherseen mit hohem Gefälle H, daher
hohem Wasserdruck, aber niedrigem Wasser-Volumenstrom V , Mitteldruckkraftwerke sind
typisch Talsperren bei mittlerem Gefälle & Druck und mittlerem Volumenstrom,
Niederdruckkraftwerke sind Flusskraftwerke mit niedrigem Gefälle & Druck, aber hohem
Volumenstrom, wie die Bespiele von Tabelle 4.3 zeigen.
Niederdruckkraftwerk
Mitteldruckkraftwerk
Hochdruckkraftwerk
Durchfluss hoch
Durchfluss mittel
Durchfluss niedrig
Flusskraftwerk
Talsperre
Gebirgsspeichersee
Wallsee/Österreich
3 Schluchten/ China
Bieudron/Schweiz
Donau
Yangtsekiang
Tal Grand Dixence
H = 9.1 m
H = 183 m
V = 2880 m /s
V = 12295 m /s
H = 1883 m **)
V = 86 m3/s
Pe = 210 MW
Pe = 18000 MW *)
Pe = 1295 MW
Kaplan-Turbinen
Francis-Turbinen
Pelton-Turbinen
6 Generatoren je 35 MW
26 Generatoren je 692 MW
3 Generatoren je 432 MW
3
3
Tabelle 4.3: Ausgeführte Hoch-, Mittel- und Niederdruck-Wasserkraftwerke: *) weltgrößtes Wasserkraftwerk,
**) Weltrekord
a) Kaplan-Turbine:
a)
b)
Bild 4.32: a) Vertikal gelagerte KAPLAN-Turbine mit vier Laufschaufeln („Propellerflügeln“): Da die Turbine
bei unterschiedlicher Wasser-Durchflussmenge stets mit konstanter Drehzahl drehen soll, werden über die
Regelstange die Laufschaufeln verdreht und über den Regelring die Schaufeln des Leitapparats (Wasserzustrom)
verstellt, damit stets optimale Anströmwinkel und damit optimaler Wirkungsgrad gegeben sind (Quantz,
Wasserkraftmaschinen). b) Horizontal gelagerte Kaplan-Turbine im Rohrturbinen-Kraftwerk Greifenstein,
Donau, Österreich (Andritz Hydro)
Laufkraftwerke an großen Flüssen mit einer hohen Wasser-Durchflussmenge und einem
niedrigen Druckgefälle ( = niedrige Stauhöhe von wenigen Metern) bedürfen einer speziellen
Wasserturbine, der KAPLAN-Turbine, einer Propellerturbine mit verstellbaren Laufschaufeln
(typisch 4 Stück je Turbine) und einem verstellbaren Leitapparat für die Wasseranströmung,
um auch bei unterschiedlicher Durchflussmenge (Winter: zumeist wenig Wasser, nach der
Schneeschmelze: viel Wasser) jeweils maximalen Turbinenwirkungsgrad von ca. 90% zu
gewährleisten (Bild 4.32). Die Drehzahl ist daher niedrig (n ca. 80/min bis ca. 150/min) und
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.28
Teil: Elektrische Energiewandler
der direkt gekuppelte Synchrongenerator muss folglich eine hohe Polzahl haben, um trotz der
niedrigen Drehzahl (z.B. 50/min) 50 Hz Wechselspannung zu induzieren. Diese als
"Schirmgeneratoren" in Vertikalbauweise oder als Rohrturbinengeneratoren in
Horziontalbauweise ausgeführten Schenkelpolmaschinen weisen Leistungen von typisch
20 MVA bis 40 MVA je Maschine auf.
Beispiel 4.6.1-1:
Polzahl eines langsam laufenden Schirmgenerators mit vertikaler Welle: n = 50/min,
fNetz = 50 Hz: 2 p = 2 f Netz / n = 2 ⋅ 50 /(50 / 60) = 120 Pole: 60 Nord – und 60 Südpole!
b) Francis-Turbine:
Bei Mitteldruckkraftwerken mit Stauhöhen bis ca. 30 m ist die FRANCIS-Turbine mit
ihren dreidimensional gekrümmten, nicht verstellbaren Laufschaufeln in großer Zahl im
Einsatz (n ca. 200/min bis 500/min, max. Wirkungsgrad ca. 90 %, Bild 4.33). Es überwiegt
die Vertikalbauweise (Bild 4.35a) mit direkt gekuppeltem Synchron-Schenkelpolgenerator.
Bei Großkraftwerken wie ITAIPU am Parana-Fluss (Grenzfluss Brasilien/Paraguay) werden
Einheitsleistungen bis ca. 800 MVA je Turbine und Generator (Weltrekord!) erreicht.
Bild 4.33: Vertikal gelagerte FRANCIS-Turbine: Die Laufschaufeln sind gegossen und nicht verstellbar (D1:
mittlerer Laufraddurchmesser D3: Saugrohrdurchmesser). Der Anströmwinkel wird durch die verstellbaren
Leitschaufeln, über die die Wasseranströmung erfolgt, bei unterschiedlichem Wasserstrom stets optimal
eingestellt (Quantz, Wasserkraftmaschinen).
c) Pelton-Turbine:
Bei den (Pump)Speicher-Kraftwerken kehren sich die Verhältnisse um: Geringe
Durchflussmenge und hoher Wasserdruck, erzeugt durch enorme Gefällehöhen von bis zu
1500 m zwischen Wasseroberfläche des Stausees und dem Wassereinlauf im Krafthaus, das
sich auf der Talsohle befindet, erfordern den Einsatz der PELTON-Turbine (Bild 4.34).
Diese hat becherförmige Schaufeln (Bild 4.35b) und wird aus mehreren am Umfang
angeordneten "Nadeldüsen" tangential mit einem gebündelten Wasserstrahl beaufschlagt.
Eine Umkehr der Strömungsrichtung ist somit nicht sinnvoll möglich. Die Turbine rotiert auf
Grund der hohen Strahlgeschwindigkeit rasch (z. B. 500/min, 750/min, 1000/min), so dass
niederpolige, relativ hochdrehende Synchronschenkelpolmaschinen zum Einsatz kommen,
die wegen ihrer tw. hohen Leistung und Drehzahl (mehrere 100 MVA) als
"Grenzleistungsmaschinen" anzusprechen sind. Ihre mechanische und elektrisch-thermische
Bauteilbeanspruchung liegt an der Grenze des technisch Machbaren. Manchmal ist sogar
direkte Leiterkühlung (deionisiertes Wasser im hohlgebohrten Kupferleiter) erforderlich. Oft
ist die elektrische Maschine als Motor-Generator ausgeführt. In Zeiten geringen
Energiebedarfs treibt sie als Motor eine Pumpe an, um Wasser in den Speicher des Stausees
hoch zu pumpen, um so die überschüssige elektrische Energie der im Grundlastbetrieb
fahrenden thermischen Kraftwerke zu speichern. Zu diesem Zweck ist entweder eine
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.29
Teil: Elektrische Energiewandler
mehrstufige radial wirkende Pumpe an das zweite Maschinenwellenende gekuppelt, oder die
Turbine ist so konzipiert, dass sie auch als Pumpe wirken kann. Das funktioniert jedoch nur
bei FRANCIS-Turbinen, nicht aber bei PELTON-Rädern mit ihren becherförmigen Schaufeln.
Beispiel 4.6.1-3:
Polzahl eines schnell laufenden Generators: n = 1000/min, fNetz = 50 Hz:
2 p = 2 f Netz / n = 2 ⋅ 50 /(1000 / 60) = 6 Pole: 3 Nord – und 3 Südpole!
Bild 4.34: Horizontal gelagerte PELTON-Turbine: Die becherförmigen Schaufeln werden aus Wasserdüsen,
über die die Strahlstärke eingestellt werden kann (im Bild: Handrad für Nadelventil, eine Düse dargestellt) mit
hohem Wasserdruck, aber geringer Wasserdurchflussmenge beaufschlagt (Quantz, Wasserkraftmaschinen).
a)
b)
Bild 4.35: a) Vertikal gelagerte FRANCIS-Turbine: Die gegossenen Laufschaufeln sind nicht verstellbar. Der
Wasser-Anströmwinkel wird durch die verstellbaren Leitschaufeln bei unterschiedlichem Wasserstrom optimal
eingestellt. b) Oberflächenbeschichtung der becherförmigen Schaufeln eines PELTON-Turbinen-Laufrads
(Andritz Hydro, Österreich)
Die Wirkungsgradkette in Wasserkraftwerken stellt sich etwa wie folgt dar:
Hydraulischer Wirkungsgrad der Rohrleitungen etc.:
0.95
Wasserturbinenwirkungsgrad:
0.9
Generatorwirkungsgrad:
0.98
Kraftwerkseigenbedarf:
0.97
Der Gesamtwirkungsgrad des Wasserkraftwerks ist daher ca. 0.95 x 0.9 x 0.98 x 0.97 = 0.81.
Im Fall des Pumpspeicher-Kraftwerks erfolgt die Wasserbewegung zwischen Ober- und
Unterbecken zur Speicherung von potentieller Energie des Wassers im Oberbecken bei
Motorbetrieb mit Pumpe od. Pumpturbine. Der Generatorbetrieb erfolgt mit der Turbine oder
Pumpturbine. Dadurch gelingt das Speichern überschüssiger Energie aus dem elektrischen
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.30
Teil: Elektrische Energiewandler
Netz, aber auch die Abgabe von Engpass-Leistung zur Stabilisierung des Netzes.
Pumpsspeicher-Kraftwerke sind daher wichtig für die Netzregelung! Der SpeicherWirkungsgrad ist das Produkt aus Motor- & Generatorbetrieb: 0.85 x 0.85 = 0.72.
4.6.2 Turbinen in thermischen Kraftwerken
In thermischen Kraftwerken werden Dampf- und Gasturbinen zur Erzeugung mechanischer
Energie aus Wärmeenergie eingesetzt. Sie drehen sehr rasch mit 1500/min bzw. 1800/min (50
Hz bzw. 60 Hz) oder 3000/min bzw. 3600/min. Erstere erfordern 4-polige, letztere erfordern
2-polige Generatoren, um 50 Hz bzw. 60 Hz Nennfrequenz zu erzeugen. Die Leistungen
betragen bei Gasturbinen (Bild 4.36) maximal ca. 350 MW, und reichen bei Dampfturbinen
bis ca. 1000 MW in „volltouriger“ (3000/min bzw. 3600/min) und bis ca. 1600 MW in
"halbtouriger" (1500/min bzw. 1800/min) Ausführung. Die von diesen thermischen
Turbomaschinen angetriebenen Generatoren heißen Turbogeneratoren und haben die
größten Leistungen überhaupt unter den elektrischen Maschinen. Sie sind wegen der hohen
Umfangsgeschwindigkeiten mechanisch hoch beansprucht und haben daher massive,
freiformgeschmiedete und mit dem Fräser bearbeitete Läufer aus vergütetem Edelstahl. Die
wegen der enormen Fliehkräfte hohen mechanischen Spannungen lassen nur begrenzte
Läuferdurchmesser von maximal 1.2 m bis 1.3 m zu.
Beispiel 4.6.2-1:
Läuferumfangsgeschwindigkeit: Rotordurchmesser dr = 1.2 m, Drehzahl n = 3600 /min:
v = d rπn = 1.2 ⋅ π ⋅ (3600 / 60) = 226 m/s ( = 814 km/h !); = 70% der Schallgeschwindigkeit.
Bild 4.36: Gasturbine: Rechts Lufteintritt und Kompressor (Luftverdichter, Verdichtungsgrad ca. 1:30), danach
Brennstoffzufuhr (z.B. Heizöl schwer) und Verbrennung in zwei Ringbrennkammern. Das heiße Verbrennungsgas (bis zu 1300°C) expandiert im anschließenden Turbinenteil links. Daher nimmt das Gasvolumen zu; die
Schaufeln werden von Stufe zu Stufe länger. Vorne tritt das heiße Gas mit einer Abgastemperatur von ca. 600°C
aus (Quelle: ABB / Alstom).
Im Gegensatz zum Turbogenerator, bei dem die gesamte Leistung in einer Maschine
umgesetzt wird, muss der Leistungsumsatz in der Dampfturbine in drei Maschinen, dem
Hochdruck-, Mitteldruck- und Niederdruckteil erfolgen (Bild 4.37 und 4.38a). Da
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.31
Teil: Elektrische Energiewandler
gegenüber dem Hochdruckteil der Dampf im Niederdruckteil bereits stark expandiert ist,
benötigt er ein großes Volumen und damit große Strömungsquerschnitte. Daher sind die
Schaufeln der Turbine im Niederdruckteil lang (z. B. 1 m, Bild 4.38b) und weisen einen
großen Außendurchmesser D auf (z.B. 4 m). Wegen der hohen Fliehkräfte müssen sie
mechanisch hochwertig ausgeführt sein, z. B. aus geschmiedetem martensitisch-ferritischem
Stahl mit 12% Chromgehalt.
Bild 4.37: Mehrstufige Dampfturbine: HD: Hochdruckturbine, MD: Mitteldruckturbine: hier zweiflutig; ND1,
ND2: Zwei in Serie nachgeschaltete zweiflutige Niederdruck-Turbinen, G: Synchron-Generator, BER:
bürstenlose Synchron-Erregermaschine. 1 … 4: Wellenkupplungen, M4 Kupplungsmoment. In jeder
Turbinestufe werden der Dampfdruck und die Dampftemperatur verringert und dabei in Strömungsenergie
infolge Dampfexpansion umgewandelt. Die Strömungsenergie versetzt die Turbinenrotoren in Drehung. Das
Dampfvolumen nimmt wegen der Expansion zu, so dass die ND-Turbinen viel größer als die HD-Turbine sein
müssen, damit dieselbe Dampfmasse in gleicher Zeit durchströmen kann.
Beispiel 4.6.2-2:
Braunkohlekraftwerk Lippendorf, Deutschland: 930 MW Turbinenleistung pro Generator
Hochdruckteil: Frischdampfdruck 250 bar bei 550°C; Niederdruckteil: Dampf expandiert von
0.5 bar auf Kondensatordruck 0.038 bar, also nahe "Vakuum".
Gesamtwirkungsgrad des Kraftwerks: bei Volllast: 42.4% (davon Generator: 99%)
Beispiel 4.6.2-3:
Mechanische Beanspruchung der Turbine bei max. Drehzahl nmax = 1.2nN , nN = 3000/min:
Umfangsgeschwindigkeit der Schaufelspitzen:
vmax = Dπ ⋅ 1.2nN = 4π ⋅ 1.2 ⋅ 50 = 753 m/s = 2710 km/h (!). Es tritt in der Dampfströmung
Überschall auf. Die Fliehkraft pro Schaufel bei einer Schaufellänge 1 m, einer Schaufelmasse
m = 10 kg und einem Schwerpunktsabstand r von der Drehachse 1.2 m beträgt
FSchaufel = m ⋅ r ⋅ (2π ⋅ 1.2nN ) 2 = 1700 kN ≅ 170 Tonnen!
Das entspricht der schweren Masse zweier Hochleistungs-Elektroloks (z.B. ÖBB-Lok Taurus
1016: 6.4 MW, 84 Tonnen).
Damit die gesamte Dampfturbinen-Leistung elektrisch in einem Generator umsetzbar ist, ist
in den vergangenen Jahrzehnten stetig die Leistung pro Generator („Einheitsleistung“) erhöht
worden. Eine Leistungserhöhung durch Erhöhung des Durchmessers ist ab 1.2 m nicht mehr
möglich. Eine Verlängerung der Maschine über 7 m Blechpaketlänge ist wegen des dann sehr
schlanken und damit biegeweichen Läufers (lFe/dr = 7/1.2 = 5.8!) auch nicht möglich. Es verbleibt nur eine erhöhte Ausnützung der Maschine („mehr Leistung aus dem gleichen
Volumen“), also eine Erhöhung des Leiterstroms und/oder des Magnetfelds. Die Eisensättigung verbietet eine Erhöhung der magnetischen Luftspaltflussdichte über 1.2 T. Die
Leistung kann nur über den Strom und die Stromdichte gesteigert werden, was zu erhöhten
Stromwärmeverlusten führt. Daher muss die Kühlung intensiviert werden. So ist bis ca.
300 MVA noch Luftkühlung möglich, darüber jedoch direkte Leiterkühlung mit WasserTU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.32
Teil: Elektrische Energiewandler
stoffgas oder deionisiertem (= nicht elektrisch leitfähigem) Wasser in den hohlgebohrten
Kupferleitern erforderlich.
a)
b)
Bild 4.38: a) Dampfturbine und Generator (rechts hinten) im Braunkohle-Dampfkraftwerk „Schwarze Pumpe“,
Deutschland, 2 x 800 MW, 3000/min, 50 Hz, 2546 kNm Drehmoment. Links vorne: Hochdruckturbine, danach
Mitteldruckturbine, rechts zwei Niederdruck-Turbinen, b) Zweiflutiger Turbinenrotor einer Niederdruckturbine
aus Rotorscheiben (Masse 260 Tonnen) (Quelle: Siemens AG)
Leistungsparameter moderner Dampfkraftwerke in Deutschland:
a) Steinkohle-Kraftwerk Moorburg (Vattenfall): 2 x 820 MW elektrisch,
Wirkungsgrad: 46.5%
Wasserdampf: Eintritt: 600°C, 276 bar Überdruck
Austritt: 26 mbar Unterdruck (Dampf bei ca. 20°C)
b) Braunkohle-Kraftwerk Boxberg R (Vattenfall): 675 MW elektrisch, Wirkungsgrad: 43.3%
Wasserdampf: Eintritt: 600°C, 286 bar Überdruck
Austritt: 39 mbar Unterdruck
Auf Grund des geringeren Heizwerts je kg Kohle haben Braun- gegenüber Steinkohlekraftwerken etwas schlechtere Wirkungsgrade. Die Turbinen- und Generatortechnologie ist jedoch
dieselbe.
Durch die Kombination veiner Gasturbinen mit einer nachgeschalteten kleineren
Dampfturbine entsteht das GuD- oder Kombi-Kraftwerk. Das heiße Abgas der Gasturbine
verdampft im nachgeschalteten Dampfprozess Wasser. Dieser Dampf treibt eine
Dampfturbine an (GuD-Kraftwerk: Gas und Dampf bzw. Combined Cycle). Dadurch wird der
Gesamtwirkungsgrad erhöht, wie folgendes Beispiel mit Schätzwerten zeigt.
Beispiel 4.6.2-4: GuD-Kraftwerk von der Größe des Kraftwerks Irsching/Bayern:
a) Gasturbine: 375 MW mit 40% Wirkungsgrad: 60% (= 565 MW) Abwärme !
Erforderliche thermische Leistung (Gasbrennwert): 375 + 565 = 940 MW
b) Die Abwärme wird im Wärmetauscher zur Dampferzeugung genutzt:
Rauchgasein-/-austrittstemperatur am Wärmetauscher: 550 °C / 80 °C bzw. 823 K / 353 K.
Abschätzung des thermischen Wirkungsgrads am Wärmetauscher:
η WT = 1 – Tab/Tzu = 1 – 353/823 = 57.1%
c) Dampfturbine:
Wasserdampftemperaturen am Ein-/Austritt: 520 °C / 20 °C bzw. 793 K / 293 K
Abschätzung des thermischen Wirkungsgrads des Dampfprozesses an der Dampfturbine:
η DP = 1 – Tab /Tzu = 1 – 293 / 793 = 63%
Damit ergibt sich b) und c) eine mechanische Leistung an der Dampfturbinenwelle:
565·0.571·0.63 = 203 MW, die nahezu vollständig im Generator in el. Leistung umgewandelt
wird. Daher beträgt die elektrische Gesamtleistung aus a) und c): 375 + 203 = 578 MW.
Der elektrische Wirkungsgrad des GuD-Prozesses ist 578 / 940 = 61.5% (gemessen wurden in
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
4.33
Teil: Elektrische Energiewandler
Irsching: 60.75 %). Wird alternativ zur die in den Kühltürmen abgeführte Restwärme diese
als Fernwärme in benachbarte Wohn- oder Industrieanlagen zu z. B. Heizungszwecken
ausgekoppelt, steigt der thermische Anlagenwirkungsgrad auf bis zu 90%.
Weitere Details zu Kraftwerken und eine entsprechende Systematik sind im dritten Teil dieser
Ringvorlesung (Teil: Elektrische Energieversorgung, Fr. Prof. Hanson) enthalten.
Bild 4.39: Schema eines Ein-Wellen-GuD-Kraftwerks, bei dem Gas- und Dampfturbine mit dem Generator auf
einer Welle angeordnet sind (Quelle: Siemens AG). Auf Grund der rasch einsatzbereiten Gasturbine lässt sich im
GuD-Kraftwerk Irsching/Bayern die Regelleistung von 0 auf 500 MW in 30 min. steigern!
TU Darmstadt
Institut für Elektrische Energiewandlung
Energietechnik
5.1
Teil: Elektrische Energiewandler
5. Anhang
Repetitorium: Grundgesetze der Mechanik, Elektromagnetik und Drehstromtechnik
5.1 Mechanische Grundgesetze
a) Kraft und Drehmoment
a)
b)
Bild 5.1: Zweites NEWTON´sches Axiom für a) linear bewegte und b) rotierende Massen.
Das zweite NEWTON´sche Axiom (5.3) besagt, dass die Kraft F, die auf eine Masse m wirkt,
diese beschleunigt (Bild 5.1a), wobei die Beschleunigung die Änderung der Geschwindigkeit
v mit der Zeit t ist. Dabei ist die Geschwindigkeit v die Änderung des Ortes x der Masse m mit
der Zeit t .
2. NEWTON´sches Axiom: "Kraft = Masse x Beschleunigung"
v = dx/dt
(5.1)
a = dv/dt = d2x/dt2
(5.2)
F = m⋅
d 2x
(5.3)
dt 2
Wird die Masse m im Abstand r von einem Drehpunkt starr mit einer „masselosen“
Verbindung befestigt (Bild 5.1b), so kann sie sich nur auf einer Kreisbahn bewegen. Die
Verbindungslinie vom Drehpunkt zum Massenmittelpunkt (Schwerpunkt) überstreicht bei
dieser Bewegung den Winkel γ. Aus dem zurückgelegten Weg x auf einem Kreisbogen folgt
die Bahngeschwindigkeit v und die Beschleunigung a.
x =γ ⋅r
(5.4)
v = x = r ⋅ dγ / dt
2
a = x = r ⋅ d γ / dt
,
2
.
(5.5)
Aus (5.3) folgt durch Multiplikation mit der Länge des Hebelarms r das 2. NEWTON´sche
Axiom für rotierende Massen (5.6): "Drehmoment = Trägheitsmoment x Winkelbeschleunigung". (J: Trägheitsmoment, M : mechanisches Drehmoment, Ωm: mechanische
Winkelgeschwindigkeit).
F ⋅r = m⋅r ⋅
d 2x
dt
TU Darmstadt
2
2
=m⋅r ⋅
d 2γ
dt
2
M =J⋅
d 2γ
dt
2
=J⋅
dΩ m
dt
(5.6)
Institut für elektrische Energiewandlung
Energietechnik
J = m⋅r2 ,
5.2
M = F ⋅r,
Teil: Elektrische Energiewandler
Ω m = dγ / dt
(5.7)
Bei einer mechanischen Drehfrequenz (Drehzahl) n von einer Umdrehung je Sekunde wird
genau der Winkel γ = 2π überstrichen. Daher ist die mechanische Winkelgeschwindigkeit Ωm
das 2π -fache der mechanischen Drehzahl n.
Ω m = 2π ⋅ n
(5.8)
b) Arbeit und Leistung
Die von einem Linearmotor geleistete Arbeit W, wenn er die Masse m mit einer konstanten
Kraft F längs des Wegs x bewegt, ist die mechanische Energie, die dieser Linearmotor an die
Arbeitsmaschine abgibt: "Arbeit = Kraft x Weg"
W = F⋅x
(5.9)
Die je Zeiteinheit t geleistete Arbeit W ist die vom Linearmotor erbrachte mechanische
Leistung P: "Leistung = Kraft x Geschwindigkeit"
P = dW / dt = F ⋅ dx / dt = F ⋅ v
P = F ⋅v
(5.10)
Durch Erweiterung von (5.10) mit der Länge des Hebelarms r und dessen Kehrwert 1/r wird
die entsprechende Formel für die rotatorische Bewegung abgeleitet:
"Leistung = Drehmoment x Winkelgeschwindigkeit"
P = F ⋅ r ⋅ dx / dt ⋅
dγ
1
=M ⋅
= M ⋅ Ωm
r
dt
P = M ⋅ Ωm
(5.11)
Die in der bewegten Masse m gespeicherte mechanische Energie heißt kinetische Energie.
Aus (5.10) folgt durch Integration:
W = P ⋅ dt = F ⋅
dx
dv
v2
⋅ dt = m ⋅ ⋅ v ⋅ dt = m ⋅ v ⋅ dv = m ⋅
dt
dt
2
(5.12)
Für rotierende Massen entsteht (5.13) aus (5.12) durch Umformung. In Schwungmassenspeichern (das sind rasch rotierende Massen mit hohem Trägheitsmoment) wird dieser Effekt
zur Speicherung von kinetischer Energie genutzt.
W = m⋅r2 ⋅
Ω m2
1 v2
⋅
=
J
⋅
2
r2 2
(5.13)
5.2 Elektromagnetische Grundgesetze - Überblick
Die Grundgesetze beschreiben die Wirkprinzipien der elektromagnetischen
Energiewandlung:
- Die Erzeugung magnetischer Felder durch stromdurchflossene Spulen wird durch den
AMPÈRE´schen Durchflutungssatz beschrieben.
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.3
Teil: Elektrische Energiewandler
- Die berührungslose Energieübertragung von ruhenden auf bewegte Teile oder von einer
Spule auf eine zweite, galvanisch getrennte Spule wird durch das FARADAY´sche
Induktionsgesetz bestimmt.
- Die Erzeugung mechanischer Kräfte durch die Wirkung magnetischer Felder auf stromdurchflossene Leiter beschreibt das LORENTZ´sche Kraftgesetz.
- Die Feldlinien von B sind stets geschlossen, d. h. Nord- und Südpole treten immer
paarweise auf. Es sind bis jetzt keine magnetischen "Monopole" bekannt.
Werkstoffgesetze beschreiben
- die Wirkung von Permanentmagneten zur Magnetfelderzeugung,
- den Stromfluss in Leiterwerkstoffen (OHM´sches Gesetz),
- die Magnetfeldverstärkung durch magnetisierbare Stoffe (z. B. Eisen),
- die isolierende Wirkung von Isolierwerkstoffen z. B. zwischen spannungsführendem Leiter
und geerdetem Gehäuse des Wandlers.
Leiterwerkstoffe: Kupfer, Aluminium (in Ausnahmefällen Supraleiter)
Isolierwerkstoffe: Kunststoffe, Glas, Glimmer, Kunstharze
R = R20°C ⋅ [1 + α ⋅ (ϑ − 20°C )]
Elektrische Leitfähigkeit κ
Dichte γ
Widerstandskoeffizient α
Wärmedehnung (linear) αl
Silber
.
6
Kupfer
.
6
Aluminium
.
Eisen
6
62.5 10 S/m 57.0 10 S/m 34.0 10 S/m 10.0.106 S/m
2.7 kg/dm3
7.9 kg/dm3
10.5 kg/dm3 8.9 kg/dm3
0.0036 /K
0.0039 /K
0.0040 /K
0.0045 /K
.
-6
.
-6
.
-6
24 10 /K
11.5.10-6 /K
19.3 10 /K 16.8 10 /K
Tabelle 5.1: Vergleich von Stoffwerten ausgewählter Werkstoffe (reine Stoffe) bei ϑ = 20°C. Die Zunahme des
OHM´schen Widerstands R mit der Temperatur ϑ (gemessen in °C) ist im Temperaturbereich von ca. –40°C bis
+250°C linear.
Als eine wesentliches Werkstoffgesetz wird das OHM´sche Gesetz (5.14) erläutert.
R=
U 1 l
= ⋅
I κ A
(5.14)
Bild 5.2: Mathiessen´sche Regel: Beispiel: Im mit Ni-Atomen verunreinigten Kupferleiter Cu verbleibt auch
beim absoluten Nullpunkt T = 0 K ein spezifischer Restwiderstand ρG infolge Kollision der Leitungselektronen
mit den Störstellen im Kristallgitter, während der Anteil ρT mit sinkender Temperatur abnimmt [4].
Der OHM´sche Widerstand eines elektrischen Leiterwerkstoffs ist proportional zur Länge l
des Leiters, und umgekehrt proportional zum Querschnitt A des Leiters und dessen
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.4
Teil: Elektrische Energiewandler
elektrischer Leitfähigkeit κ. Die inverse Größe ρ = 1 / κ heißt spezifischer elektrischer
Widerstand und ist im Allgemeinen temperaturabhängig. Da üblicherweise Drahtlängen in
Meter und Drahtquerschnitte in Quadratmillimeter angegeben werden, wird für ρ die Einheit
Ωmm2/m bevorzugt (SI-Einheit: Ωm). Für die SI-Einheit der elektrischen Leitfähigkeit κ wird
S/m verwendet (S = 1/Ω: 1 Siemens = 1/Ohm). Der spezifische elektrische Widerstand setzt
sich in Metallen aus zwei Anteil zusammen (Mathiessen´sche Regel, Bild 5.2):
a) Kollisionen der Leitungselektronen mit den um ihre Ruhelage schwingenden Atomrümpfen
der Metallkristallstruktur. Mit sinkender Temperatur sinkt die Schwingungsamplitude der
Atomrümpfe und ist beim absoluten Temperatur-Nullpunkt T = 0 Null. Daher sinkt dieser
Anteil ρT (Index T: Temperatur-abhängig) mit sinkender Temperatur auf Null.
b) Kollisionen der Leitungselektronen mit Störstellen (Fremdatomen) und Gitterfehlern
(Kristalldefekten). Diese Defekte sind temperaturunabhängig, so dass auch bei T = 0 ein
endlicher spezifischer Widerstand ρG (Index G: Gitter) verbleibt.
Die Temperaturabhängigkeit des elektrischen Widerstands beschreibt man häufig nicht
mit der absoluten Temperatur T (gemessen in Kelvin K), sondern mit der Temperatur
ϑ = T - 273.15 in Grad Celsius (°C). Die Temperaturdifferenz Δϑ = ϑ − ϑ0 ist die
„Erwärmung“ des Leiterwerkstoffs (gemessen in K), und ϑ0 ist die Bezugstemperatur (°C).
Aus Bild 5.2 folgt der Temperaturkoeffizient α(ϑ0) bei ϑ0 (gemessen in 1/K). Die Formel in
Tab. 5.1 gilt für ϑ0 = 20°C und α (20°C ) = α 20 = 0.0039 / K . Über die (gemessene) LeiterWiderstandszunahme kann dessen Temperatur berechnet werden.
Beispiel 5.2-1:
R(ϑ ) / R(20°C ) = Rϑ / R20 = 1.45 : ϑ = 20°C +
1
α 20
R
1
⋅ (1.45 − 1) = 135°C
⋅ ϑ − 1 = 20 +
0.0039
R20
5.3 Erzeugung magnetischer Felder
a) Magnetfelderzeugung durch stromdurchflossene Spulen
Vorteile:
- beliebig hohe Felder möglich
- Magnetfeld veränderbar über den Strom
- bei großen Wandlern kostengünstiger
als Permanentmagnete
Nachteile:
- Stromwärmeverluste in den Spulen
(Ausnahme: Supraleitende Spulen)
- Stromversorgung nötig
b) Magnetfelderzeugung durch Permanentmagnete
- Al-Ni-Co-Legierung
- Ferrite (z.B. Barium-Ferrit)
- Selten-Erd-Magnete: Sinterwerkstoffe auf Basis der magnetisierbaren Stoffe Eisen, Nickel,
Kobalt mit "seltenen Erden" wie z. B. Samarium (Sm) als Sm2Co17, SmCo5 oder mit
Neodymium (Nd) als NdFeB-Magnete (Neodym-Eisen-Bor).
Vorteile:
- keine "Erregerverluste"
- einfacher Aufbau des Wandlers
TU Darmstadt
Nachteile:
- Magnetfeld nicht veränderbar
- Magnetwerkstoff (noch) teuer
- B-Felder auf etwa 1.2 T begrenzt
- Gefahr der Entmagnetisierung im großen
Gegenfeld anderer stromführender Spulen
Institut für elektrische Energiewandlung
Energietechnik
5.5
Teil: Elektrische Energiewandler
5.4 Stromerregte Magnetfelder - AMPÈRE´scher Durchflutungssatz
Bild 5.3: Eisenjoch mit Luftspalt und Erregerspule: Im Luftspalt soll eine magnetische Flussdichte B erregt
werden. Gestrichelt: Idealisierte Feldlinie von B (geschlossene Kurve C). Die Größe von B (Vektorfeld) variiert
ortsabhängig nach Betrag, Richtung und Orientierung.
AMPÈRE´scher Durchflutungssatz
:
In einem magnetischen Feld H ist das Linienintegral über die magnetische Feldstärke H
entlang einer geschlossenen Linie C gleich der gesamten elektrischen Durchflutung Θ (Bild
5.3: "Durchflutung" Θ = N ⋅ I ), die durch die von C aufgespannte Fläche AC hindurch tritt.
H ⋅ ds = Θ
Bild 5.3:
C
H ⋅ ds = Θ = N ⋅ I ≈ H1 ⋅ l1 + H 2 ⋅ l2 + ... + H n ⋅ ln
(5.15)
C
Der Durchflutungssatz in seiner allgemein gültigen Form (5.15 links) wird für die spezielle
Geometrie von Bild 5.3 vereinfacht. Die geschlossene Kurve C wird identisch mit der
strichlierten Feldlinie gewählt, so dass der differentielle Tangentenvektor ds stets parallel mit
dem Vektor H ist. Daher wird das Skalarprodukt H ⋅ ds durch ein gewöhnliches Produkt
H ⋅ ds ersetzt. Das Feld in den einzelnen Jochabschnitten mit den Längen li, i =1, ..., n (Bild
5.3: n = 6 Abschnitte inklusive Luftspalt) ist nahezu homogen, daher wird das Integral durch
eine Summe ersetzt. In Bild 5.3 sind N = 4 Spulenwindungen gegeben: Θ = N ⋅ I = 4 I . Der
Strom fließt in die Fläche AC hinein. Das zugehörige Magnetfeld umkreist die Durchflutung
im Rechtsdrehsinn (positive Feldrichtung, Rechtsschrauben- bzw. Rechte-Hand-Regel).
Dies ist eine willkürliche, aber allgemein eingehaltene Zählrichtung. Wegen den
geschlossenen B-Feldlinien ist bei Vernachlässigung von aus dem Eisenkreis austretenden
Streufeldern der magnetische Fluss Φ in jedem Querschnitt A des Eisens konstant.
Φ = B ⋅ dA ≈ B ⋅ A
(5.16)
A
5.5 Verstärkung von Magnetfeldern durch Eisen (magnetisches Werkstoffgesetz)
Im Luftspalt ist die Flussdichte B der Feldstärke H über μ0 direkt proportional.
B = μ0 H
TU Darmstadt
(5.17)
Institut für elektrische Energiewandlung
Energietechnik
5.6
Teil: Elektrische Energiewandler
Eisen besteht aus vielen kleinen "Elementarmagneten" (WEISS´sche Bezirke), die sich im
Feld H der Spule parallel zu dieser Feldrichtung ausrichten und so ein eigenes resultierendes
Magnetfeld J erzeugen. Diese zusätzliche Flussdichte J (magnetische Polarisation) verstärkt
das H-Feld der Spule zur resultierenden magnetischen Flussdichte B.
B = μ 0 H + J = μ ⋅ H >> μ 0 ⋅ H
(5.18)
Diese "spontane" Magnetisierbarkeit ("Ferromagnetismus") besitzen Eisen, Nickel,
Kobalt und die HEUSLER-Legierungen. Oberhalb der CURIE-Temperatur (Eisen: 744°C)
erlischt diese spontane Magnetisierbarkeit. Da die Isolierwerkstoffe der Erregerspule schon ab
ca. 180 ... 240°C zerstört werden, ist die CURIE-Temperaturgrenze i. a. irrelevant. Wenn alle
"Elementarmagnete" parallel zum äußeren H-Feld ausgerichtet sind, ist der Maximalwert von
J (Sättigungpolarisation Js) erreicht. Dieser Sättigungseffekt tritt bei Eisen ab ca. 1.7 T auf.
Die Permeabilität μ ist daher bei kleinen Werten von B groß ("ungesättigt", μ = ca.
5000μ0,), und nimmt mit steigenden B-Werten ab, um im Grenzfall μ0 zuzustreben
(vollständige Sättigung).
Magnetische Werkstoffe:
Bild 5.4: Weichmagnetische (Kurve 1),
hartmagnetische (Kurve 2) [1]
Bild 5.5: B(H)-Kennlinien von Permanentmagneten [1]
im zweiten Quadranten der B-H-Ebene
1: Al-Ni-Co-Magnet, 2: Ba-Ferrit,
Selten-Erden-Magnete: 3: Sm2Co17, 4: NdFeB
Bild 5.4 zeigt mit Kurve 1 qualitativ die B(H)-Abhängigkeit von Eisen. Nach dem Abschalten
des Spulenstroms I verschwindet wegen (5.15) das Feld H, aber es verbleibt eine Restpolarisation JR, da nicht alle "Elementarmagnete" sich beliebig regellos im Eisen ausrichten.
Diese Remanenzflussdichte BR = JR ist bei Eisen klein. Erst durch Anlegen eines negativen
Felds –BHC ("Koerzitivfeldstärke") wird B als resultierendes Feld Null. Die so entstandene
B(H)-Schleife heißt Hysteresekurve (hysteresis (gr.): Nachhinken, da B dem H "nachhinkt").
Die Fläche unter der B-H-Kurve ist ein Maß für die im Eisen umgesetzte Wärme durch innere
Reibung der "Elementarmagnete" beim Ummagnetisieren, also beim Durchfahren eines
vollen Zyklus von +Hmax auf –Hmax und wieder zurück zu +Hmax, etwa wenn I ein
Wechselstrom ist (Hystereseverluste Phys).
Bei Eisen sind BR und BHC klein, so dass die Schleife schmal ist und die Hystereseverluste
klein sind ("weichmagnetischer Werkstoff"). Bei Permanentmagneten ist die Hysteresisschleife durch geeignete Werkstoffwahl stark vergrößert, so dass z. B. bei NdFeB eine
Remanenzflussdichte von ca. 1...1.3 T und eine Koerzitivfeldstärke von ca. 900 kA/m
möglich ist ("hartmagnetischer Werkstoff", Bild 5.4, Kurve 2). Die Permanentmagnete
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.7
Teil: Elektrische Energiewandler
werden nicht ummagnetisiert, sondern dienen zur Erzeugung von magnetischen Gleichfeldern
z. B. in Gleichstrommaschinen oder im Polrad von Synchronmaschinen. Für die
Permanentmagnete interessiert nur der Arbeitsbereich mit positiver Flussdichte B unter dem
Einfluss entmagnetisierender (negativer) äußerer Felder H, also der zweite Quadrant der
B(H)-Schleife (Bild 5.5). Die gleichzeitig hohen Werte von BR und BHC erklären, warum
Selten-Erd-Magnete trotz ihrer relativ hohen Anschaffungskosten immer weitere Verbreitung
finden.
Beispiel 5.5-1:
Berechnung eines einfachen magnetischen Eisenkreises
Ungesättigtes Eisen: μ = 5000μ0, Geometrie wie Bild 5.3; die Eisenabschnitte weisen stets
denselben Querschnitt A auf. Da μ groß ist, verlaufen die Feldlinien von B (bis auf den
Luftspaltbereich) gänzlich im Eisen. Der magnetische Fluss Φ im Eisenkern ist konstant.
Daher ist die magnetische Flussdichte B im Eisen (Index Fe) und im Luftspalt (Index δ)
gleich groß.
B Fe =
Φ
A
= Bδ
(5.19)
Die magnetische Feldstärke ist gemäß (5.17), (5.18):
im Luftspalt: H δ =
Bδ
μ0
, im Eisen: H Fe =
B Fe
μ
=
Bδ
μ
=
Hδ
<< H δ
5000
(5.20)
Im Eisen ist die magnetische Feldstärke HFe nahezu Null, da das Feld BFe hauptsächlich durch
den Beitrag J der "Elementarmagnete" aufgebracht wird. Der Durchflutungssatz (5.15) erlaubt
auf Grund der hier gewählten einfachen Geometrie die Unterscheidung von nur zwei
Abschnitten: Eisen (Länge sFe) und Luft (Länge δ).
H Fe s Fe + H δ δ = N ⋅ I = V Fe + Vδ
(5.21)
Die einzelnen Beiträge V zur Gesamtdurchflutung NI heißen in Analogie zum elektrischen
Kreis "magnetische Spannungen" (Einheit: A!). In der Regel ist der Luftspalt δ deutlich
kleiner als die Länge der Kurve C im Eisen sFe, z.B. δ/sFe = 1/100. Daher ist das Verhältnis
der magnetischen Spannungen im Luftspalt und Eisenkreis klein: 0.02.
V Fe B Fe ⋅ s Fe Bδ ⋅ δ
/
=
Vδ μ Fe μ 0
s Fe ⋅ μ 0 100 ⋅ 1
=
= 0.02
=
δ ⋅ μ Fe 1 ⋅ 5000
.
Fazit:
Die magnetische Spannung im Eisen ist im ungesättigten Fall trotz des längeren
Wegabschnitts sFe der Kurve C somit vernachlässigbar. Es muss nur die Luftspaltweite δ von
der Erregerspule magnetisiert werden.
Soll z. B. Bδ = 1 T bei einem Luftspalt δ = 3 mm sein, so ergibt sich ein Erregerbedarf Θ =
2390 A.
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
Bδ ≈
5.8
Teil: Elektrische Energiewandler
μ0 ⋅ N ⋅ I
δ
Bδ = 1T =
μ0 ⋅ Θ 4π ⋅ 10−7 Vs /(Am) ⋅ Θ
=
0.003m
δ
(5.22)
Θ = N ⋅I =
1 ⋅ 0.003
= 2390A
4π ⋅ 10− 7
Fazit:
Die Erregerspule kann mit N = 100 Windungen ausgerüstet werden, was einen Strombedarf
(Gleichstrom) I = 23.9 A ergibt, oder z. B. mit N = 250 Windungen bei einem Strombedarf
von I = 9.56 A (freie Wahl der Windungszahl!).
5.6 Das Induktionsgesetz
Bild 5.6: Leiterschleife (Ns = 1 Windung) im Luftspalt eines Magnetkreises (Spulenfläche A = b.l,
angeschlossenes Voltmeter), N Windungen der Erregerspule, Erregerstrom I
a) Ruhinduktion
In dem Luftspalt des Magnetkreises Bild 5.6 befindet sich eine Spule mit Ns Windungen. Die
Spulenfläche A = b ⋅ l ist gleich groß gewählt wie der Jochquerschnitt des Eisens. Der Erregerstrom in der Erregerspule sei zeitlich veränderlich: I = i(t). Auf Grund von (5.22) ändert sich
die Luftspaltflussdichte zeitlich in gleicher Weise Bδ(t) ~ i(t). Für μFe → ∞ gilt exakt:
Bδ (t ) = μ 0 ⋅ N ⋅ i (t ) / δ
(5.23)
Gemäß (5.16) ändert sich der von der Luftspaltspule umfasste Fluss gleichfalls: Φ(t) = Bδ(t)A.
Das FARADAY´sche Induktionsgesetz (5.24) besagt, dass in der Luftspaltspule eine (als
außen an den Klemmen wirksame) elektrische Spannung ui(t) induziert wird, die je Windung
der negativen zeitlichen Änderung des mit jeder Windung verketteten Flusses entspricht. Weil
die Luftspaltspule relativ zum Magnetkreis ruht, spricht man von "Ruhinduktion". Auf
Grund der Serienschaltung der einzelnen Windungen wird an den Spulenklemmen eine Nsmal so große Spannung gemessen. Die Größe N sΦ =Ψ heißt "Flussverkettung".
u i (t ) = − N s ⋅
dΦ (t )
dΨ (t )
=−
dt
dt
(5.24)
b) Bewegungsinduktion
Eine zeitliche Änderung des mit der Luftspaltspule verketteten Flusses kann auch dadurch
erreicht werden, dass bei zeitlich konstantem Luftspaltfeld Bδ die Spule z. B. seitlich nach
links aus dem Luftspalt gezogen wird. Dann ändert sich die Fläche A(t) innerhalb der Spule,
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.9
Teil: Elektrische Energiewandler
durch die die magnetische Flussdichte (im Bild 5.7a entgegen dem Normalenvektor dA )
hindurch tritt: Φ (t ) = − Bδ ⋅ dA(t ) (Bild 5.7a).
a)
b)
Bild 5.7: Bewegte Leiterschleife von Bild 5.6, Aufsicht, bewegungsinduzierte Spannung
Wird die Luftspaltspule seitlich mit z. B. konstanter Geschwindigkeit v aus dem Luftspalt
gezogen, so nimmt die Fläche A(t) gemäß (5.25) ab.
A(t ) = (b − v ⋅ t ) ⋅ l
(5.25)
Mit (5.24) folgt, dass trotz zeitlich konstanten Magnetfelds Bδ eine induzierte Spannung ui
im Voltmeter von Bild 5.6 gemessen wird.
ui (t ) = − N s ⋅
dΦ (t )
dA(t )
= − N s ⋅ (− Bδ ⋅
) = − N s ⋅ v ⋅ Bδ ⋅ l
dt
dt
von 2 nach 1, Bild 5.7
(5.26)
Diese "Bewegungsinduktion" (Luftspaltspule bewegt sich relativ zum Magnetfeld) lautet
allgemein formuliert: In einem elektrischen Leiter mit der Länge l, der in einem Magnetfeld
B mit der Geschwindigkeit v bewegt wird, tritt eine bewegungsinduzierte elektrische Feld
stärke Eb = v × B auf. Sie wird in Bild 5.7b von 2 nach 1 gezählt und ist im Beispiel negativ.
Mit der an den Klemmen von 2 nach 1 messbaren Spannung u gilt mit dem Spulenwiderstand
Rc und dem Spulenstrom i (positiv gezählt in Richtung von ds in Bild 5.7a) u + ui = Rc ⋅ i .
Bei Leerlauf (i = 0) ist die gemessene Leerlaufspannung u wegen u + ui = 0 u = −ui . Sie
wird in Bild 5.7b von 2 nach 1 positiv gezählt. Im Beispiel von Bild 5.7b ist sie wegen der
positiv aufgeladenen Klemme 2 positiv, was zu u = −ui > 0 passt, da ui im Beispiel von 2
nach 1 negativ ist. Die induzierte Spannung ist maximal, wenn B, v und die Leiterachse
zueinander rechte Winkel aufweisen. Ein rechter Winkel zwischen v und B führt auf
Eb = v × Bδ ↑↑ ds Eb = v ⋅ Bδ in Richtung ds .
(5.27)
l
l
Eb und ds parallel: ui = Eb ⋅ ds = Eb ⋅ ds = Eb ⋅ l = v ⋅ Bδ ⋅ l von 1 nach 2
0
(5.28)
0
In (5.28) wird angenommen, dass sich Eb entlang der Leiterlänge l nicht ändert. Bei Ns
Windungen ergibt sich mit B = Bδ in Übereinstimmung mit (5.26) von 2 nach 1:
ui = − N s ⋅ v ⋅ Bδ ⋅ l
.
(5.29)
Fallweise wird die induzierte Spannung ui als in der Spule wirksame „innere“ Spannung
(Quellenspannung oder Urspannung u0 = −ui ) aufgefasst, so dass bei Leerlauf die
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.10
Teil: Elektrische Energiewandler
Klemmenspannung von 2 nach 1 u = u0 = −ui ist. Sie wirkt wegen u0 = −ui im Spuleninneren GEGEN die induzierte Feldstärke Eb (Bild 5.7b). Diese Spannung u0 ist analog zur
Batterie definiert, wo die Quellenspannung U0 ebenfalls entgegengesetzt zum elektrochemisch erzeugten E-Feld positiv gezählt wird. Häufig wird diese „innere“ Spannung (etwas
inkorrekt) als induzierte Spannung bezeichnet, also u0 ="ui " . Wir werden dies meist so
verwenden, aber jeweils hinweisen, dass ui dann als „innere“ Quellenspannung gemeint ist.
5.7 Die elektromagnetische Kraft
Das LORENTZ´sche Kraftgesetz besagt, dass auf einen stromdurchflossenen Leiter mit der
Leiterlänge l, dem (differentiellen) Leiterrichtungsvektor ds und dem Strom I, der sich in
einem Magnetfeld B befindet, eine Kraft F (LORENTZ-Kraft) ausgeübt wird, deren
Richtung im rechten Winkel zu der von ds und B aufgespannten Ebene liegt.
F = I ⋅ (ds × B)
(5.30)
l
Die Kraft F (5.30) ist maximal, wenn das B-Feld und die Leiterachse (Richtung von l)
zueinander rechte Winkel aufweisen. In (5.31) ist angenommen, dass sich B entlang der
Leiterlänge l nicht ändert.
l
(5.31)
Rechter Winkel zwischen ds und B : F = I ⋅ (ds × B ) = I ⋅ B ⋅ ds = I ⋅ B ⋅ l
l
Bild 5.8: Bewegter Leiterabschnitt der
Luftspaltspule von Bild 1.8 im Magnetfeld [14]
a) Generator (bremsende LORENTZ-Kraft),
b) Motor (antreibende LORENTZ-Kraft)
0
Bild 5.9: Dreifinger-Regel für das LORENTZ´sche
Kraftgesetz („UVW-Regel“) [15]
In Bild 5.8 ist das LORENTZ´sche Kraftgesetz auf die Luftspaltspule von Bild 5.7 angewendet (Strom Is: Spulenstrom), wobei die induzierte Spannung ui als „innere“ Quellen
spannung gegen die Richtung Eb = v × B eingetragen ist. Bei Ns Windungen liegen Ns Leiter
im Magnetfeld, so dass die Gesamtkraft auf die Spule Ns-mal so groß ist wie in (5.31).
F = N s ⋅I s ⋅Bδ ⋅ l
TU Darmstadt
(5.32)
Institut für elektrische Energiewandlung
Energietechnik
5.11
Teil: Elektrische Energiewandler
Mit der Dreifinger-Regel (Bild 5.9) wird die Richtung der Kraft ermittelt. Der Daumen zeigt
in Richtung der Ursache (Stromfluss), der Zeigefinger in Richtung des Felds (Vermittlung
zwischen Ursache und Wirkung), der Mittelfinger in Richtung der Wirkung (Kraft) – "UVWRegel". In Bild 5.8 ist die Richtung von v und B stets gleich, folglich auch die Richtung der
bewegungsinduzierten „inneren“ Spannung ui. Ihre Richtung wird ebenfalls mit der UVWRegel bestimmt: Ursache v, Vermittlung B, Wirkung Eb, „innere“ Spannung ui entgegen Eb
positiv gezählt. In Bild 5.8a fließt der Strom gegen die ui-Richtung (Generator). Die Kraft F
ist entgegen v gerichtet und bremst den Leiter. In Bild 5.8b fließt der Strom in die ui-Richtung
(Motor). Die Kraft F ist in v–Richtung gerichtet und treibt den Leiter an.
Die Kraftwirkung kann unmittelbar aus dem B-Feldlinienbild verstanden werden
(Bild 5.10). Das Fremdfeld (Homogenfeld) ist von unten nach oben orientiert (unten N-Pol,
oben S-Pol). Der Strom fließt aus der Zeichenebene auf den Betrachter zu und erregt ein
kreisförmiges Feldlinienbild, dessen Richtung im Gegen-Uhrzeigersinn orientiert ist
(Rechtsschraubenregel). Die Überlagerung beider Felder ergibt das resultierende B-Feld, das
links vom Leiter kleiner als rechts vom Leiter ist. Die Feldlinien dürfen in ihrer Wirkung wie
"elastische Gummischnüre" aufgefasst werden (MAXWELL´scher Zug), die sich nach
Möglichkeit verkürzen wollen und daher auf den Leiter eine nach links gerichtete LORENTZKraft ausüben. Zu demselben Ergebnis kommt man auch mit (5.31) und der UVW-Regel.
Bild 5.10: B-Feldlinienbild und Kraft auf einen stromdurchflossenen Leiter im Fremdfeld.
5.8 Magnetflüsse und Induktivitäten
a) Magnetflüsse
Reale Magnetfelder in Luft sind – abgesehen von der stets geschlossenen B-Feldlinienform –
relativ kompliziert verteilt, wie das Feldbild eines Permanentmagnet-Stabmagneten in einer
Zylinderspule zeigt (Bild 5.11a). Einzelne Windungen der Spule sind mit einer unterschiedlichen Anzahl von Feldlinien verkettet, so dass die Flussverkettung Ψ von Windung zu
Windung variiert. Bei Verwendung der feldverstärkenden Wirkung des Eisens bildet sich das
Magnetfeld nahezu zur Gänze im Eisen aus ("gebündelter Fluss": Hauptfluss Φh). Nur ein
kleiner Anteil der Feldlinien schließt sich in der Luft (Streufluss Φσ , Bild 5.11b). Jede
einzelne Windung der Erregerspule (schraffierter Querschnitt) ist mit dem gesamten Hauptund Streufluss verkettet. Da nur der Hauptfluss im Luftspalt z. B. zur Spannungsinduktion in
der eingezeichneten Luftspaltspule genutzt werden kann, soll der Streufluss möglichst klein
sein (kleine Streuziffer σ = Φσ /Φh).
σ=
Φσ
<1
Φh
TU Darmstadt
(5.33)
Institut für elektrische Energiewandlung
Energietechnik
5.12
a)
Teil: Elektrische Energiewandler
b)
Bild 5.11: Magnetflüsse:
a) Permanent-Stabmagnet in einer Zylinderspule: Deren einzelne Windungen sind in unterschiedlichem Ausmaß
mit dem Feld verkettet [14].
b) Schematische Aufteilung des Gesamtflusses in Hauptfluss Φh und Streufluss Φσ .
b) Induktivitäten
Die N Windungen der Erregerspule (Bild 5.6) sind mit Haupt- und Streufluss verkettet:
- Hauptflussverkettung :Ψ h = N ⋅ Φ h , Streuflussverkettung :Ψ σ = N ⋅ Φ σ
(5.34)
Die Luftspaltspule (Ns Windungen) ist nur mit dem Hauptfluss verkettet:
- Hauptflussverkettung :Ψ h, Ns = N s ⋅ Φ h
(5.35)
Wird die Erregerspule mit Wechselstrom i(t) (Frequenz f) gespeist, so pulsieren wegen
B ~ i (t ) auch die Flüsse und damit die Flussverkettungen. Gemäß dem Induktionsgesetz wird
die Spannung ui,Ns in der Luftspaltspule induziert (Gegeninduktion, da das induzierende Feld
von einer anderen, nämlich der Erregerspule erzeugt wird). Dies führt zum Begriff der
Gegeninduktivität M.
dΨ h, Ns (t )
u i , Ns = −
M=
dt
Ψ h, Ns
i
=
= −N s ⋅
dΦ h (t )
di (t )
= −M ⋅
dt
dt
(5.36)
N sΦ h N s Bδ A
μ Ni / δ
A
=
= Ns ⋅ A⋅ 0
= N s ⋅ N ⋅ μ 0 ⋅ = N s ⋅ N ⋅ Λh
δ
i
i
i
(5.37)
In der Erregerspule wird die Selbstinduktionsspannung ui,N induziert (Selbstinduktion, da das
induzierende Feld von der Spule selbst erregt wurde). Die zugehörige Selbstinduktivität L
besteht aus den Komponenten Haupt- und Streu-Selbstinduktivität Lh und Lσ .
u i, N = −
L=
dΦ h +σ (t )
dΨ h +σ (t )
di (t )
= −N ⋅
= −L ⋅
dt
dt
dt
Ψ h +σ
i
=
(5.38)
N (Φ h + Φ σ ) NBδ A NΦ σ
=
+
= N 2 ⋅ Λh + N 2 ⋅ Λσ = Lh + Lσ
i
i
i
(5.39)
Fazit:
Die Selbstinduktivität ist proportional zum Quadrat der Spulenwindungszahl, die
Gegeninduktivität proportional zum Produkt der Windungszahlen der verketteten Spulen.
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.13
Teil: Elektrische Energiewandler
5.9 Ummagnetisierungsverluste
Bild 5.12: In das elektrisch leitfähige Eisenjoch wird durch den veränderlichen Fluss Φh eine Spannung
induziert, die Wirbelströme (Kreisströme) im Eisen treibt.
Bei Wechselstromspeisung der Erregerspule pulsiert der Hauptfluss Φh mit derselben
Frequenz f wie der Erregerstrom i. Nicht nur in der Luftspaltspule Bild 5.12, sondern auch im
Eisenjoch wird eine Spannung induziert, da auch das Eisenjoch mit dem Hauptfluss
„verkettet" ist. Im elektrisch leitfähigen Eisen fließen daher Ströme auf in sich geschlossenen
Strombahnen (Kreis- oder Wirbelströme), die OHM´sche Verluste im Eisen verursachen
(Wirbelstromverluste PFt). Wenn das Eisenjoch aus einzelnen gegeneinander isolierten
Blechen geringer Dicke geschichtet wird, so werden diese Strombahnen wirkungsvoll
unterbrochen. Es können nur noch sehr kleine Wirbelströme in jedem Blech fließen, die umso
geringer sind, je dünner die Blechdicke ist.
Bild 5.13: Gleichstrom-Magnetisierungskurven B(H), Hystereseschleife vernachlässigt [1]
(1) warmgewalztes Elektroblech, 0.5 mm dick, v10 = 3 W/kg
(2) kaltgewalztes, kornorientiertes Blech, 0.35mm dick, Vorzugsrichtung, v10 = 0.45 W/kg
Die Summe aus Wirbelstromverlusten PFt und Hystereseverlusten Phys heißt Ummagnetisierungsverluste ("Eisenverluste") PFe. Die Verluste werden z. B. bei B = 1 T Amplitude
und f = 50 Hz Frequenz in speziellen Geräten (EPSTEIN-Rahmen) gemessen und je 1 kg
Masse als Verlustziffer v10 in W/kg vom Blechhersteller angegeben. Zusätzlich zur
Schichtung von Eisenkreisen aus Blechen kann die spezifische elektrische Leitfähigkeit der
Bleche durch Beimengung von Silizium herabgesetzt werden, um die Wirbelstromverluste zu
verringern ("Dynamo- oder Elektroblech", Bild 5.13, Kurve 1). Allerdings sinkt dadurch
auch μ etwas. Beim Magnetkreis von Bild 5.4, aber auch bei Transformatoren, ist die
Richtung der Feldlinien stets parallel zu den Eisenjochlängsrichtungen. Für diese Blechkörper
wurde ein spezielles Blech entwickelt, das kaltgewalzt in Walzrichtung die "ElementarTU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.14
Teil: Elektrische Energiewandler
magnete" bevorzugt anordnet. Daher ist in Blechlängsrichtung (= Walzrichtung = Vorzugsrichtung) μ deutlich erhöht, in Querrichtung aber deutlich verringert ("kornorientiertes
Blech", Bild 5.13, Kurve 2). Für rotierende elektrische Maschinen, wo die Feldrichtung in der
Blechebene ständig dreht, ist dieses Blech daher nicht geeignet.
5.10 Elektrische Leistung
a) Effektivwert eines sinusförmigen Wechselstroms
An einem Leitungswiderstand R verursacht eine sinusförmige Wechselspannung (Frequenz f,
Kreisfrequenz ω = 2πf ) mit dem Momentanwert u (t ) = Uˆ ⋅ sin ωt den phasengleichen
Wechselstrom i (t ) = Iˆ ⋅ sin ωt = (Uˆ / R) ⋅ sin ωt . Die elektrische Momentanleistung
p(t ) = u (t ) ⋅ i (t )
(5.40)
Uˆ 2
u 2 (t )
2
ist dann p(t ) =
= Ri (t ) = u (t ) ⋅ i (t ) =
⋅ sin 2 (ωt ) (Bild 5.14).
R
R
Bild 5.14: Momentanwerte von Spannung, Strom und Leistung an einem Ohm´schen Widerstand [15]
In Bild 5.14 sind u, i und p im Intervall einer Periode T = 1 / f dargestellt. Der dort
ersichtliche Verlauf der Leistung wird durch die Umformung
1 − cos(2ωt ) UˆIˆ UˆIˆ
p(t ) = UˆIˆ ⋅ sin 2 (ωt ) = UˆIˆ ⋅
=
−
cos(2ωt ) = P + p~ (t )
2
2
2
(5.41)
klarer ausgedrückt: Der Ausdruck p = UˆIˆ / 2 stellt eine von der Zeit unabhängige Leistung
dar; sie wird durch die gestrichelte Gerade in Bild 5.14 dargestellt. Dieser konstanten
Leistung ist eine mit der doppelten Frequenz des Wechselstromes 2f periodische Leistung
UˆIˆ
p~ (t ) = −
cos(2ωt ) überlagert. Für die Praxis ist die Momentanleistung p(t) des Wechsel2
stromes meist belanglos. Es interessieren nur die mittlere Leistung p als Wirkleistung und
τ
Arbeit des Stromes W = p(t ) ⋅ dt über so lange Zeit τ, dass diese mit vernachlässigbarem
0
Fehler einer ganzen Zahl von Perioden T gleichgesetzt werden kann.
τ
W = p(t ) ⋅ dt ≈ p ⋅ τ
(5.42)
0
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.15
Teil: Elektrische Energiewandler
Die mittlere Leistung p über eine ganze Zahl von Perioden wird durch P in (5.41)
P= p=
UˆIˆ Uˆ
Iˆ
U2
=
⋅
=U ⋅I =
R
2
2 2
(5.43)
angegeben, da die Leistungskurve in Bild 5.14 oberhalb und unterhalb der gestrichelten
Geraden gleich große Flächen einschließt. Die eingeführten Abkürzungen U = Û / 2 ,
I = Iˆ / 2 heißen Effektivwert der Spannung und Effektivwert der Stromstärke. Sie
bedeuten die Spannung und Stromstärke jenes Gleichstroms, dessen Leistung P gleich der
mittleren Leistung des Wechselstroms ist. Für die Arbeit des Wechselstroms während einer
ganzen Zahl N von Perioden T gilt gemäß (5.42) W = P ⋅ NT = U ⋅ I ⋅ NT . Diese Arbeit
kommt in Bild 5.14 als Fläche unter der Leistungskurve p(t) zum Ausdruck. Sie wird durch
die im Bereich einer ganzen Zahl von Perioden gleich großen Flächen unter der gestrichelten
Geraden ersetzt. Der Effektivwert I einer sinusförmig veränderlichen Größe i(t) ist der
Sonderfall einer aus einer mittleren Leistung p ermittelten Ersatzgröße einer allgemein
periodischen Größe i(t) (Periode T), deren Leistung an einem Widerstand R gleich groß ist
wie die einer Gleichgröße I.
1
P= p=
T
T
0
T
1
p(t )dt = i 2 (t ) ⋅ R ⋅ dt = I 2 R
T 0
T
1 2
I=
i (t ) ⋅ dt
T 0
(5.44)
Das Ohm´sche Gesetz für Wechselgrößen wird mit den Effektivwerten U, I in der Form
U = R ⋅ I geschrieben, obwohl es sich um zeitlich periodisch veränderliche Größen handelt,
wenn ein Betrachtungszeitraum gemeint ist, der zumindest eine Periode umfasst und wenn nur
die mittlere im Widerstand umgesetzte Leistung P interessiert.
Fazit:
Unter dem Effektivwert einer Wechselspannung (eines Wechselstromes) verstehen wir jene
Gleichspannung (jenen Gleichstrom), die an einem Leitungswiderstand während einer
ganzen Zahl von Perioden dieselbe Arbeit wie der Wechselstrom verrichtet.
b) Leistung und Arbeit des Wechselstroms
Wenn im Wechselstromkreis kapazitive und induktive Widerstände auftreten, weisen Strom
und Spannung im Allgemeinen eine Phasenverschiebung zueinander auf. Es sei der Strom
durch die Funktion i (t ) = Iˆ sin(ωt ) und die Spannung durch die Funktion u (t ) = Uˆ sin(ωt + ϕ )
gegeben. Im Zeitintervall dt wird gemäß (5.42) die differentiell kleine Arbeit
dW = u (t ) ⋅ i (t ) ⋅ dt
verrichtet.
Die
Leistung
im
Zeitpunkt
t
ist
dann
p(t ) = dW / dt = u (t ) ⋅ i (t ) . Wir betrachten folgende Sonderfälle:
Fall a) ϕ = 0:
An OHM´schen Widerständen R sind Strom und Spannung in Phase, also die
Phasenverschiebung zwischen ihnen Null. Der Verlauf von u(t), i(t) und p(t) (Bild 5.14) zeigt:
u und i stets gleiches Vorzeichen, also ist die Leistung p = u ⋅ i stets positiv. Die Arbeit
während einer Periode ist W (T ) = U ⋅ I ⋅ T und wird in Wärme umgesetzt. Diese erhöht die
Temperatur im Widerstand und die der umgebenden "Kühl"luft.
Fall b) ϕ = -π/2:
Bei einem rein kapazitivem Widerstand (idealer Kondensator) eilt der Strom der Spannung
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.16
Teil: Elektrische Energiewandler
um 90° vor (Verlauf von u(t), i(t) und p(t) siehe Bild 5.15). Der Phasenwinkel ϕ wird vom
Strom zur Spannung gezählt und ist daher bei Voreilen des Stroms NEGATIV.
Fall c) ϕ = π/2:
Bei rein induktivem Widerstand (ideale Magnetspule ("Drossel")) eilt der Strom der
Spannung um 90° nach. vor. Der Phasenwinkel ϕ ist daher POSITIV.
Bild 5.15: [15] Momentanwerte von Spannung, Strom
und Leistung an einem idealen Kondensator : ϕ = -90°
Bild 5.16: [15] Momentanwerte von Spannung,
Strom und Leistung an einer realen Spule (reale
Drossel): 0 < ϕ < 90°
Gemäß Bild 5.15 wird im Fall b) während der Dauer einer Periode ebensoviel positive wie
negative Arbeit verrichtet; gleiches gilt für Fall c). Die mittlere Leistung und die Arbeit im
Verlauf einer ganzen Zahl von Perioden sind daher Null; der zugehörige Strom, der im
zeitlichen Mittel keine Arbeit verrichtet, heißt wattloser Strom oder Blindstrom.
Kapazitiver und induktiver Widerstand werden daher Blindwiderstände genannt. Die
zugehörige Leistung mit dem Mittelwert Null wird als Pendelleistung zwischen
Spannungsquelle und Blindwiderstand mit doppelter Netzfrequenz 2f verlustlos ausgetauscht.
Ihre Leistungsamplitude heißt Blindleistung Q.
ϕ = ±π / 2 : p(t ) = Uˆ sin(ωt + ϕ ) ⋅ Iˆ ⋅ sin ωt = ±Uˆ sin ωt ⋅ Iˆ ⋅ cos ωt = ±UI ⋅ sin(2ωt ) = ±Q sin(2ωt )
1
p(t ) =
T
T
p(t )dt = 0
(5.45)
0
In realen Schaltungen treten stets auch OHM´sche Widerstände auf (z. B. leitfähige
Verbindungen wie Anschlussdrähte aus Kupferlackdraht zwischen Spannungsquelle und
Blindwiderstand), die zu einer in Wärme umgesetzten elektrischen Leistung führen, was zu
Fall d) führt.
Fall d) 0 < ϕ < π / 2 :
Eine reale Spule besteht aus einem OHM´schen Widerstand der Spulenwicklung und aus
einer induktiven Komponente infolge Selbstinduktion durch das Spulen-Magnetfeld. Daher
liegt der Phasenwinkel im Bereich 0 < ϕ < π / 2 . Nach Bild 5.16 überwiegt im Laufe einer
Periode die positive Arbeit, und es wird Wirkleistung P in Wärme umgesetzt. Um diesen
Mittelwert der Leistung pendelt die Momentanleistung mit dem Wechselanteil p~ (t ) . Dieser
Wechselanteil kann in den Leistungsanteil mit der Amplitude Q (bedingt durch den
induktiven Anteil der Spule) und den Anteil mit der Amplitude P (bedingt durch den
Widerstand R) zerlegt werden.
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.17
Teil: Elektrische Energiewandler
p(t ) = Uˆ sin(ωt + ϕ ) ⋅ Iˆ ⋅ sin ωt = Uˆ ⋅ Iˆ ⋅ sin ωt ⋅ [sin ωt ⋅ cos ϕ + cos ωt ⋅ sin ϕ ]
UˆIˆ
UˆIˆ
⋅ cos ϕ ⋅ (1 − cos 2ωt ) +
⋅ sin ϕ ⋅ sin 2ωt = P ⋅ (1 − cos 2ωt ) + Q ⋅ sin 2ωt
p(t ) =
2
2
p (t ) = P + p~ (t ) = UI cos ϕ + UI cos(2ωt − ϕ ) = P + S ⋅ cos(2ωt − ϕ )
Momentanleistung: p (t ) = P ⋅ (1 − cos 2ωt ) + Q ⋅ sin 2ωt
(5.46)
Wirkleistung: P = U ⋅ I ⋅ cos ϕ
(5.47)
Blindleistung: Q = U ⋅ I ⋅ sin ϕ
(5.48)
Scheinleistung: S = P 2 + Q 2 = U ⋅ I
(5.49)
a)
b)
Bild 5.17: Reale Spule (Drossel): Zwei gleichwertige Zeigerdiagramme zu Bild 5.16: a) Zerlegung der
Spannung, b) Zerlegung des Stroms in Wirk- und Blindkomponente [15].
Mit den Zeigerdiagrammen aus Bild 5.17 wird Fall d) auf die Fälle a), c) zurückgeführt: Das
Zerlegen des Spannungszeigers U in eine zum Stromzeiger I parallele Komponente Uw und
eine dazu normale Komponente Ub ergibt U b = U ⋅ sin ϕ , welche eine Spannung mit der
Phasenverschiebung 90° darstellt, die zur Arbeit während einer Periode nichts beiträgt (Blindkomponente). Es folgt aus dem Zeigerdiagramm die Blindleistung U b ⋅ I = UI ⋅ sin ϕ = Q in
Übereinstimmung mit (5.48). Die Parallelkomponente ist eine Spannung ohne Phasenverschiebung (Phasenwinkel Null) gegenüber dem Strom: U w = U ⋅ cos ϕ . Ihre mittlere
Leistung während einer Periode ist die mittlere Leistung (Wirkleistung) des Gesamtstromes
U w ⋅ I = UI ⋅ cos ϕ = P in Übereinstimmung mit (5.47). Man kommt zum selben Ergebnis mit
einer Zerlegung des Stroms in eine parallel und normal zur Spannung wirkende Komponente:
I w = I ⋅ cos ϕ , I b = I ⋅ sin ϕ , U ⋅ I w = UI ⋅ cos ϕ = P , U ⋅ I b = UI ⋅ sin ϕ = Q .
c) Wattmeter zur Messung der elektrischen Leistung
Digitale elektronische Wattmeter („Multimeter“) bestimmen aus einem zeitlich beliebigen
Stromsignal i(t) (Strompfad) und einem zeitlich beliebigen Spannungssignal u(t)
(Spannungspfad), die an den Messeingängen anliegen, mit einer vorgegebenen MittelwertZeit τ eine mittlere Leistung als Wirkleistung (5.50). Speziell für sinusförmige Strom- und
Spannungssignale konstruierte Wattmeter (z. B. analog arbeitende elektrodynamische
Wattmeter, die über Magnetkräfte zwischen ruhenden und drehenden Spulen auf ein
Zeigergerät arbeiten), ermitteln die Wirkleistung p(t ) = UI ⋅ cos ϕ .
p(t ) =
1
τ
τ
u(t )i(t )dt
(5.50)
0
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.18
Teil: Elektrische Energiewandler
Beachten Sie, dass ein Phasenwinkel nur zwischen sinusförmigen Signalen definiert ist.
Die Spannung an einer Schaltung, in der die in Wärme umgesetzte elektrische Verlustleistung
messtechnisch bestimmt werden soll, wird an die Spannungsklemmen ("Spannungspfad")
des Wattmeters angeschlossen, während die Stromzufuhr in die Schaltung über die
Stromklemmen ("Strompfad") des Wattmeters realisiert wird (Bild 5.18).
L1
P
I1
A
Multimeter
V
USp
L
L2
Bild 5.18: Elektrische Leistungsmessung P an einer Spule L über ein Wattmeter (Multimeter)
5.11 Erzeugung eines Drehstromsystems
Die Synchronmaschine als elektrischer Energiewandler (Bild 5.19) besteht z. B. aus einem
mit Permanentmagneten bestückten Läufer, der ein zweipoliges Magnetfeld erzeugt. Dieses
rotiert, wenn der Läufer von einer mit ihm gekuppelten Turbine angetrieben wird. Drei
Ständerspulen (Ständer-Wicklungsstränge) sind über Eisenkerne gewickelt und am Umfang
jeweils räumlich um 120° versetzt angeordnet. Die Endklemmen der drei Stränge X, Y, Z
(Bild 5.20a) sind im Sternpunkt N zusammen geschaltet. Die drei Anfangsklemmen U, V, W
sind mit je einer Phase einer Fernleitung verbunden. Die Turbine rotiert mit der Drehzahl n,
so dass die drei Ständerstränge eine Änderung der Flussverkettung Ψ(t) mit der Frequenz f =
n bzw. der elektrischen Kreisfrequenz ω = 2πf erfahren. Synchronmaschinen sind so
gebaut, dass die zeitliche Änderung der Flussverkettung hochgradig sinusförmig ist. Wegen
des räumlichen Versatzes der Stränge zueinander sind die Flussverkettungen (5.51) um ein
Drittel der Schwingungsperiode phasenverschoben ("elektrischer Winkel" 2π/3 = 120°el).
Bild 5.19: Zweipoliger Synchrongenerator (schematisch), in Stern geschaltete Wicklungsstränge U, V, W;
Freileitung; dreiphasig-OHM´scher, symmetrischer Verbraucher R [15].
Mit dem Induktionsgesetz wird die induzierte Spannung je Strang berechnet (5.52), die im
Leerlauf (Stromfluss Null, z. B. bei aufgetrennter Fernleitung) an den Klemmen U-N, V-N,
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.19
Teil: Elektrische Energiewandler
W-N als Strangspannung messbar ist. In Bild 5.20b sind die zeitlichen Verläufe der drei
Strangspannungen uU , uV, uW dargestellt.
Bild 5.20: Drehstromsystem: a) die drei Wicklungen des Drehstromgenerators, b) zeitlicher Verlauf der drei
Strangspannungen (5.52), c) zugehörige komplexe Ersatzdarstellung (5.53) [4].
ΨU (t ) = −Ψˆ ⋅ sin(ω ⋅ t )
ΨV (t ) = −Ψˆ ⋅ sin(ω ⋅ t − 2π / 3)
(5.51)
ΨW (t ) = −Ψˆ ⋅ sin(ω ⋅ t − 4π / 3)
dΨ U (t )
= ωΨˆ ⋅ cos(ω ⋅ t )
dt
u i ,V (t ) = ωΨˆ ⋅ cos(ω ⋅ t − 2π / 3)
u (t ) = ωΨˆ ⋅ cos(ω ⋅ t − 4π / 3)
u i ,U (t ) = −
i ,W
uU (t ) = u i ,U (t ) = Uˆ ⋅ cos(ω ⋅ t )
uV (t ) = Uˆ ⋅ cos(ω ⋅ t − 2π / 3)
u (t ) = Uˆ ⋅ cos(ω ⋅ t − 4π / 3)
(5.52)
W
Bei zeitlich sinusförmiger Änderung von Strömen, Spannungen, Flüssen etc. ("Wechselstromrechnung") kann die komplexe Rechnung mit Vorteil verwendet werden. Die Länge
des komplexen Zeigers U gibt den Effektivwert der Spannung U an. Die Lage des Zeigers zur
Realteil-Achse in der komplexen Zahlenebene stellt den Phasenwinkel ϕ dar. Den "echten"
Zeitverlauf der Wechselspannung u(t) erhält man aus U, indem man mit 2 ⋅ e jωt multipliziert
und davon den Realteil bildet.
U = U ⋅ e jϕ
{
(5.53)
}
{
}
u (t ) = Re U ⋅ 2 ⋅ e jωt = Re U ⋅ 2 ⋅ e jϕ ⋅ e jωt = U ⋅ 2 ⋅ cos(ωt + ϕ )
(5.54)
In Bild 5.20c sind die komplexen Zeiger UU, UV, UW, passend zum Zeitverlauf Bild 5.20b
graphisch dargestellt ("Zeigerdreibein"). Diese drei Spannungen treiben bei symmetrischer
(= in allen drei Strängen gleichartiger) Belastung drei Wechselströme, die ebenfalls um
jeweils 120° el. zueinander phasenverschoben sind, das sogenannte Drehstromsystem.
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.20
Teil: Elektrische Energiewandler
5.12 Strangspannung und verkettete Spannung
Die zwischen Anfangs- und Endklemme eines Stranges messbare Spannung heißt Strangspannung (z.B. im Strang U zwischen Klemmen U und X die Spannung uU). Auf der
Fernleitung in Bild 5.19 ist nur die zwischen den Klemmen U, V, W anliegende Spannung
messbar, da der Sternpunkt nicht mit geführt ist. Diese Spannungen heißen verkettete
Spannungen. So ist z. B. zwischen U und V die verkettete Spannung uUV messbar.
u verk = uUV = uU − uV
a)
bzw.
U verk = U UV = U U − U V
(5.55)
b)
Bild 5.21: Verkettete Spannungen: a) Zeitlicher Verlauf, b) komplexes Zeigerdiagramm [4]
Im Zeigerbild Bild 5.21b kann diese Differenzbildung graphisch durch Anwendung der
komplexen Rechnung vorgenommen werden. Die Amplitude der verketteten Spannung uUV ist
um den Faktor 2 ⋅ cos(30°) = 2 ⋅ 3 / 2 = 3 größer ist als die Amplituden der Strangspannungen.
Es eilt uUV der Spannung uU um 30°el. vor (Bild 5.21a). Analoges gilt für uVW und uV bzw.
uWU und uW. Bei der in den „Grundlagen der Elektrotechnik“ verwendeten üblichen
Darstellung der Spannungs-Zählpfeile in einem Schaltbild gemäß Bild 5.22a weisen die
verketteten Spannungen von U nach V, von V nach W und von W nach U. Die
Strangspannungen zeigen von U nach X, von V nach Y und von W nach Z (Bild 5.20a). Im
Beispiel der Sternschaltung (X = Y = Z = N) zeigen die Strangspannungen im
Zeigerdiagramm zum Neutralpunkt N hin (Bild 5.22b). Die eingekreisten Potentiale der
Klemmen U, V, W, N stimmen im Zeigerdiagramm mit den ihnen zugeordneten Klemmen im
Schaltbild überein.
Es ist allerdings in der Energietechnik unüblich, die Strangspannungszeiger im
Zeigerdiagramm zur Mitte weisen zu lassen. Durch Parallelverschieben der Zeiger erhält man
das Zeigerdiagramm Bild 5.22c aus Bild 5.22b, das ebenfalls richtig ist, wenn man die
Potentiale der Klemmen nicht mehr mit einträgt. Die Kirchhoff´sche Maschenregel ergibt z.
B. weiterhin richtig für Masche I: U U − U V = U UV . Nun zeigen die Strangsspannungszeiger
nach außen. Damit Strangspannungszeiger UU nach oben zeigt, wird das Zeigerdiagramm
Bild 5.22c um 180° gedreht (Bild 5.22d), wobei die relative Phasenlage der Zeiger zueinander
erhalten bleibt, und damit auch die Knoten- und Maschenbeziehungen wie z. B.
U U − U V = U UV . Dieses Drehen um 180° entspricht einem Umdrehen aller Spannungszeiger
im Bild 5.22a, wobei nun auch wieder die Klemmenpotentiale ins Zeigerdiagramm korrekt
eingetragen werden können. Allerdings ist das Zählen der Strangspannung von N nach U bzw.
V bzw. W unüblich. Deshalb wird häufig die Darstellung Bild 5.22a gemeinsam mit Bild
5.22d verwendet.
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.21
Teil: Elektrische Energiewandler
Fazit:
Die gemäß den üblichen Zählpfeilregeln eingetragenen Spannungszeiger (z. B. von U nach N
oder von U nach V usw.) passen zur in der Energietechnik üblichen Darstellung des
Zeigerdiagramms mit nach außen weisenden Strangspannungen, wenn auf das Eintragen der
Klemmenpotentiale U, V, W, N im Zeigerdiagramm verzichtet wird. Es kommt nur auf die
relative Phasenlage der Spannungszeiger zueinander an.
a)
b)
c)
d)
Bild 5.22: a) Spannungs-Zählpfeile bei einer dreisträngigen Sternschaltung, b) zugehöriges SpannungsZeigerdiagramm, zu b) äquivalentes Zeigerdiagramm durch Parallelverschieben und Neuanordnen der Zeiger,
d) gegenüber c) um 180° gedrehtes Zeigerdiagramm
5.13 Leistung im Drehstromsystem
Bei Einphasensystemen, also auch in jedem Strang der Synchronmaschine von Bild 5.19,
pulsiert gemäß 5.14 die elektrische Momentanleistung p(t) mit doppelter Frequenz 2f. Jeder
Strang des Drehstromsystems ist ein Einphasensystem. Allerdings kommt die
Phasenverschiebung von jeweils 120° = 2π/3 zwischen den elektrischen Größen der drei
Stränge hinzu.
pU (t ) = P~ ⋅ [1 + cos(2ωt )] + Q~ ⋅ sin(2ωt )
pV (t ) = P~ ⋅ [1 + cos(2ωt − 2 ⋅ 2π / 3)] + Q~ ⋅ sin(2ωt − 2 ⋅ 2π / 3)
pW (t ) = P~ ⋅ [1 + cos(2ωt − 2 ⋅ 4π / 3)] + Q~ ⋅ sin(2ωt − 2 ⋅ 4π / 3)
(5.56)
Die Summe p(t ) = pU (t ) + pV (t ) + pW (t ) ergibt die gesamte von der Synchronmaschine
erzeugte Wirkleistung. Da die Summe cos(2ωt ) + cos(2ωt − 4π / 3) + cos(2ωt − 8π / 3) = 0
und auch die Summe sin(2ωt ) + sin( 2ωt − 4π / 3) + sin(2ωt − 8π / 3) = 0 jeweils Null ist,
folgt eine zeitlich konstante Summenleistung für das resultierende Drehstromsystem.
p (t ) = 3 ⋅ U ⋅ I ⋅ cos ϕ = P = 3P~
TU Darmstadt
(5.57)
Institut für elektrische Energiewandlung
Energietechnik
5.22
Teil: Elektrische Energiewandler
Es sind U und I die Effektivwerte von Strangspannung und Strangstrom. Die Scheinleistung
S (5.58) gibt die Strom- und Spannungsbelastung des Energiewandlers an. Sie kann auch mit
der verketteten Spannung U verk = 3 ⋅ U (5.59) ausgedrückt werden.
S = 3S ~ = 3 ⋅ U ⋅ I
(5.58)
S = 3 ⋅ U ⋅ I = 3 ⋅ U verk ⋅ I
("Faktor
3 ")
(5.59)
Daraus folgen der Leistungsfaktor cosϕ und die Blindleistung Q im Drehstromsystem.
cos ϕ = P / S = λ
(5.60)
Q = S 2 − P 2 = 3 ⋅ U ⋅ I ⋅ sin ϕ
(5.61)
a)
b)
c)
d)
Bild 5.23: Vier unterschiedliche Zustände im Einphasen-Wechselstromsystem bzw. im Drehstromsystem je
Strang a) bis d) entsprechend den Eigenschaften in Tabelle 5.2.
Der Phasenwinkel ϕ wird VOM Strom ZUR Spannung positiv im mathematisch positiven
Drehsinn gezählt (Rechts- bzw. Gegen-Uhrzeiger-Drehsinn, Bild 5.23).
Bild 5.23 a)
I eilt U vor
System kapazitiv
Q<0
Erzeuger
P<0
Bild 5.23 b)
I eilt U vor
System kapazitiv
Q<0
Verbraucher
P>0
Bild 5.23 c)
I eilt U nach
System induktiv
Q>0
Verbraucher
P>0
Bild 5.23 d)
I eilt U nach
System induktiv
Q>0
Erzeuger
P<0
Tabelle 5.2: Die vier grundsätzlichen Varianten in Wechselstrom- und Drehstromsystemen hinsichtlich der
Vorzeichen von elektrischer Wirk- und Blindleistung im Verbraucher-Zählpfeilsystem
5.14 Unsymmetrische Drehstromsysteme
a) Unsymmetrie und Nullsystem:
Ein unsymmetrisches sinusförmiges Dreiphasensystem zeichnet sich aus durch
- zwar dieselbe Frequenz und Sinus-FORM der Signale je Strang,
- aber unterschiedliche Amplituden in den drei Strängen
- und/oder von 120° abweichenden Phasenwinkeln zwischen den Strängen.
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.23
Teil: Elektrische Energiewandler
Ein unsymmetrisches System entsteht meist dadurch, dass zwar vom Netz (Generator in Bild
5.19) symmetrische verkettete Spannungen eingeprägt werden (gleiche Amplituden der
Spannungen zwischen den drei Strängen, 120° Phasenverschiebung zueinander), dass aber die
Lastimpedanzen in den drei Strängen unterschiedlich groß sind. Es sind also i. A. die drei
Verbraucher (Lastimpedanzen) nicht gleich („unsymmetrisch“), während die verketteten
Spannungen aus dem speisenden Netz in der Regel einen symmetrischen Spannungsstern
bilden. Sind nur die drei Außenleiter U, V, W mit den symmetrischen verketteten Spannungen
uUV(t), uVW(t), uWU(t) vorhanden, so kann nur die zwischen ihnen abzugreifende Spannung
uUV (t ) = uU (t ) − uV (t ) , uVW (t ) = uV (t ) − uW (t ) , uWU (t ) = uW (t ) − uU (t )
genutzt werden. Diese drei "verketteten" Spannungen (Außenleiter-Spannungen) haben
in Haushaltsnetzen den Effektivwert Uverk = 400 V bei 50 Hz Frequenz. Ist der
Sternpunktsleiter (Neutralleiter) N ebenfalls vorhanden, so können zwischen U und N die
Strangspannung uU, zwischen V und N die Strangspannung uV und zwischen W und N die
Strangspannung uW, abgegriffen werden, wie das in Haushaltsnetzen der Fall ist. Von der
speisenden Transformatorstation, die die Spannung von z. B. 20 kV auf 400 V herunter
transformiert, wird der Neutralleiter auf der Transformator-Sekundärseite in die Haushalte mit
verlegt. Der Effektivwert der Strangspannungen beträgt bei einem symmetrischen StrangSpannungsstern, also gleichartigen Verbrauchern in drei Strängen, U strang = U = U verk / 3
( 400 / 3 = 230 V). Die genormte Bezeichnungsweise für U, V, W ist L1, L2, L3. Die ältere
(und auch heute noch oft verwendete) Schreibweise für dreiphasige Generatorsysteme ist U,
V, W und für dreiphasige Verbraucher R, S, T. Wegen der kürzeren Schreibweise wird in
diesem Skript die Schreibweise U, V, W (Generatoren) und R, S, T (Verbraucher, Last)
verwendet. Bei ungleichen („unsymmetrischen“) Verbrauchern weichen die Amplituden bzw.
Effektivwerte der Strangspannungen vom symmetrischen Wert U verk / 3 ab; dann ist die
Summe der drei Strangspannungen i. A. nicht Null.
a)
b)
Bild 5.24: a) Unsymmetrisches Drehstromsystem (Stromsumme ist nicht Null), b) im Stromsystem a)
„verborgenes“ Nullstromsystem
Bei Sternschaltung ohne angeschlossenen Sternpunktsleiter (Neutralleiter N) ist allerdings die
Stromsumme der drei Strangströme Null (KIRCHHOFF´sche Knotenregel am Sternpunkt).
Bei angeschlossenem Sternpunkt oder bei Dreiecksschaltung ist die Stromsumme i. A. nicht
Null (5.62), Bild 5.24a. Das Stromsystem I U , I V , I W lässt sich dann zerlegen in ein UnterSystem I U * , I V * , I W * , dessen Stromsumme Null ist ( I U * + I V * + I W * = 0 ), und ein
Nullstromsystem (Bild 5.24b). Dieses fließt in allen drei Strängen als gleichphasiger
Nullstrom
I 0 = (I U + I V + I W ) / 3
TU Darmstadt
,
(5.62)
Institut für elektrische Energiewandlung
Energietechnik
5.24
Teil: Elektrische Energiewandler
und es gilt: I U = I U * + I 0 , I V = I V * + I 0 , I W = I W * + I 0 . Bei angeschlossenem Sternpunkt
fließt im Neutralleiter daher der dreifache Nullstrom 3I 0 = I U + I V + I W . Bei
Dreiecksschaltung fließt der Nullstrom als Kreisstrom im Dreieck, tritt aber in den
Netzzuleitungen als Anteil des Netzstroms wegen der Differenzbildung der Strangströme (z.
B. I Netz ,U = I U − I V = I U * + I 0 − ( I V * + I 0 ) = I U * − I V * ).
Der Leistungsmittelwert im unsymmetrischen System ergibt sich aus der Summe der
drei i. A. unterschiedlichen Leistungsmittelwerte pro Strang.
p = PU + PV + PW = UU IU cos ϕU + UV IV cos ϕV + UW IW cos ϕW
(5.63)
Allerdings heben sich die drei Leistungswechselanteile der drei Stränge i. A. nicht auf. Es
verbleibt eine pulsierende Wechselleistung, so dass die Gesamtleistung wie bei einem
Einphasensystem mit doppelter Frequenz um den Mittelwert der Gesamtleistung im
Drehstromsystem pulsiert. Leistungsmessungen im unsymmetrischen Drehstromsystem
werden nun kurz erläutert.
b) Drei-Wattmetermethode:
Die Drei-Wattmeter-Methode zur Leistungsmessung wird vor allem bei Vierleitersystemen
verwendet, also wo R, S, T und N vorhanden sind. Wenn der Sternpunktleiter nicht
zugänglich ist, bildet man sich den symmetrischen Sternpunkt (des Generators bzw. des
speisenden Transformators!) künstlich, indem man in die drei Spannungspfade je ein
Wattmeter einschaltet und sie zu einem Sternpunkt zusammen schaltet (Bild 5.25). Die
Summe aus Wattmeterwiderstand und eventuellem Vorwiderstand muss natürlich in allen drei
Pfaden jeweils die gleiche sein. Da die drei Phasenleistungen pR, pS, pT getrennt gemessen
werden, gibt die Summe der drei angezeigten Leistungswerte auch bei unsymmetrischer Last
(bei Vierleitersystem also auch bei stromführendem Neutralleiter) die richtige
Gesamtleistung.
p(t ) = pR (t ) + pS (t ) + pT (t ) = u R (t ) ⋅ iR (t ) + uS (t ) ⋅ iS (t ) + uT (t ) ⋅ iT (t )
(5.64)
P = PR + PS + PT
(5.65)
Bild 5.25: Drei-Wattmeterschaltung im Vierleiter-System R, S, T, N bzw. R, S, T und künstlichem Sternpunkt
c) Zwei-Wattmetermethode (ARON-Schaltung):
Bei einem Dreiphasensystem ohne Sternpunktleiter kann man mit zwei Wattmetern
auskommen. Die Zwei-Wattmetermethode gibt auch bei unsymmetrischer Last die
richtige Gesamtleistung des Systems an (Bild 5.26). An zwei Außenleitern werden die
Strompfade eingeschaltet, die Spannungspfade werden von diesen beiden Außenleitern in
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.25
Teil: Elektrische Energiewandler
gleicher Weise zum dritten Außenleiter geschaltet, also nicht zyklisch vertauscht! Die von
den beiden Wattmetern angezeigten Leistungswerte geben addiert die richtige
Gesamtleistung des verketteten Dreiphasensystems an. Die Anzeigewerte sind dabei mit ihren
richtigen Vorzeichen in die Summe einzusetzen; das heißt, zeigt ein Wattmeter negativ an, so
ist der Leistungswert negativ zu zählen: P = PRT + PST . Dass die Schaltung korrekte
Leistungswerte ermittelt, ersieht man wie folgt.
Bild 5.26: Zwei-Wattmeterschaltung im Dreileiter-System R, S, T (auch bei unsymmetrischer Last verwendbar)
Die Momentanwerte der Leistungen in den beiden Wattmetern sind
p(t ) = p RT (t ) + pST (t ) = iR (t )u RT (t ) + iS (t )u ST (t )
.
(5.66)
Wegen u RT = u R − uT = −uTR , u ST = u S − uT folgt aus (5.66):
p = iR (u R − uT ) + iS (u S − uT ) = iR u R + iS u S + (−iR − iS )uT . Da kein Neutralleiter vorhanden
sein darf, muss zwangsläufig iR + iS + iT = 0 bzw. –iR - iS = iT sein, so dass weiterhin
(5.67) und damit wieder (5.64) als korrekte Gesamtleistung folgt.
p = p RT + pST = iR u R + iS u S + (−iR − iS )uT = iR u R + iS u S + iT uT
(5.67)
Die Wattmeter bilden nun die arithmetischen Mittelwerte von (5.67).
P = PRT + PST = I RU RT cos( I R ,U RT ) + I SU ST cos( I S ,U ST ) =
= I RU R cos( I R ,U R ) + I SU S cos( I S ,U S ) + IT UT cos( I T ,U T ) = PR + PS + PT
Fazit:
Die Summe der beiden in den Wattmetern zur Messung gelangenden Momentanleistungswerte ist gleich der Summe der drei Phasen-Momentanleistungen. Allein für sich hat
jede einzelne Teilleistung keine besondere physikalische Bedeutung.
d) Zeigerdiagramm unsymmetrischer und symmetrischer Schaltungen
Mit Verwendung der beiden von den Wattmetern angegebenen Messwerte (ZweiWattmetermethode), den Messwerten der 3 Strangströme (Phasenströme) und den drei
gemessenen Strangspannungen (Phasenspannungen) kann man das Zeigerdiagramm einer
unsymmetrischen Sternschaltung (drei unsymmetrische Verbraucherimpedanzen, siehe Bild
5.27) in einfacher Weise zeichnen:
1) Man zeichnet zuerst das (gleichseitige) Dreieck der symmetrisch eingeprägten verketteten
Spannungen.
2) Von den Eckpunkten aus schlägt man mit dem Zirkel die drei ungleichen Phasenspannungen ab und erhält so den unsymmetrischen Sternpunkt der Belastungsseite.
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.26
Teil: Elektrische Energiewandler
3a) Die drei Außenleiterströme (= Phasenströme) werden ihrem Betrag nach mit AmpereMetern gemessen. Ihre Phasenlage ergibt sich in folgender Weise aus den Wattmeteranzeigen: Wattmeter 1 misst P1 = PRT = IRURT ⋅cos (IR,URT), so dass man den Phasenverschiebungswinkel zwischen IR und URT gemäß
P
cos( I R , U RT ) = RT
I RU RT
berechnen kann.
3b) Einfacher ist es, aus der Anzeige des Wattmeters PRT durch Division
P
I Rw = RT = I R cos( I R , U RT )
U RT
die Größe IRw , also die mit URT in Phase liegende Komponente von IR, auszurechnen.
a)
b)
Bild 5.27: a) Unsymmetrische Sternschaltung (UR ≠ US ≠ UT), gespeist mit drei von außen eingeprägten
symmetrischen verketteten Spannungen URS, UST, UTR, b) Konstruktion des Strom- und Spannungszeigerdiagramms bei unsymmetrischer Sternschaltung (UR ≠ US ≠ UT, IR ≠ IS ≠ IT) aus Messwerten. Strangströme
und Strangspannungen sind unterschiedlich groß!
4) Ermittlung von IR:
Man errichtet im Zeigerdiagramm die Normale vom Zeiger URT durch den Sternpunkt und
trägt vom Schnittpunkt mit dem Zeiger URT bei positivem Wattmeterausschlag die Größe
IRw in Richtung von URT, bei negativem Wattmeterausschlag in Gegenrichtung von URT
auf. Im Endpunkt dieser Strecke errichtet man wieder die Normale zu URT und schlägt vom
Sternpunkt aus die Größe IR ab. Man muss dabei denjenigen Schnittpunkt des Kreises mit
der zuletzt gezeichneten Normalen suchen, der eine Lage des Stromzeigers IR in einem
spitzen Winkel zur Phasenspannung ergibt, da es sich ja um die Phase eines Verbrauchers
handelt ( cos( I R , U R ) > 0 !).
5) In analoger Weise geht man beim Strom IS vor: Der Wattmeterausschlag des 2. Wattmeters
liefert die Größe P2 = PST. Daraus erhält man die Größe
P
I Sw = I S cos( I S , U ST ) = ST
,
U ST
die bei positivem Wattmeterausschlag in Richtung UST einzutragen ist. Mit Hilfe des mit
dem Ampere-Meter gemessenen Betrages IS erhält man so die richtige Größe und Richtung
des Zeigers von I S .
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.27
Teil: Elektrische Energiewandler
6) Die Bedingung I R + I S + I T = 0 liefert schließlich den dritten Stromzeiger IT. Er sollte
aus dem Zeigerdiagramm in der richtigen, mit dem Amperemeter in der Phase T
gemessenen Betrags-Größe folgen!
Oft sind die dreiphasigen Verbraucher symmetrisch, d. h. in jedem Strang befindet sich die
gleiche Impedanz. Dann ergeben sich folgende Verhältnisse bei der ZweiWattmeterschaltung. Es sind die drei gleichartigen Verbraucher z. B. in Stern geschaltet.
Natürlich wäre auch Dreieckschaltung möglich. Die zwei Wattmeter sind mit den
Strompfaden in Phase R und S geschaltet. Wegen des symmetrischen Verbrauchers sind die
Strombeträge in allen drei Strängen gleich: IR = IS = IT = I. Das symmetrisch speisende Netz
ergibt für alle drei verketteten Spannungen gleich große Beträge: U RS = U ST = U TR = U verk .
Die beiden Teilleistungen sind:
P1 = PRT = I RU RT cos( I R , U RT ) = I ⋅ U verk ⋅ cos( I R , U RT )
P2 = PST = I SU ST cos( I S , U ST ) = I ⋅ U verk ⋅ cos( I S , U ST )
Wenn der jeweilige Phasenwinkel ∠( I R , U RT ) bzw. ∠( I S , U ST ) gleich null, also der Cosinus
dieses Winkels gleich 1 ist, tritt der maximal mögliche Ausschlag auf:
P1 = I ⋅ U verk = Pmax , P2 = I ⋅ U verk = Pmax ,
so dass man auch P1 = Pmax ⋅ cos( I R , U RT ) , P2 = Pmax ⋅ cos( I S , U ST ) schreiben kann.
Beispiel 5.14-1:
Induktive symmetrische Last (Bild 5.28a) mit ϕ = ∠( I R , U R ) = 60°, Bild 5.28b:
Gemäß Bild 5.28c ist der erste Phasenwinkel ∠( I R , U RT ) = 30°, während der zweite Winkel
∠( I S , U ST ) = 90° ist. Es gilt dann:
P1 = Pmax ⋅ cos(30°) = ( 3 / 2) ⋅ Pmax , P2 = Pmax ⋅ cos(90°) = 0 .
a)
b)
c)
Bild 5.28: a) Je Strang: Ohm´sch-induktive Last mit ϕ = 60°, b) Zeigerdiagramm je Strang, c) Zeigerdiagramm
bei dreiphasiger Sternschaltung (Anwendung der Zweiwattmeter-Methode)
Es ist also Anzeige P1 positiv, die andere Anzeige P2 ist null. Die gesamte Drehstromleistung
ist dann P = P1 + P2 = ( 3 / 2) ⋅ U verk ⋅ I in Übereinstimmung mit
TU Darmstadt
Institut für elektrische Energiewandlung
Energietechnik
5.28
Teil: Elektrische Energiewandler
P = 3 ⋅ U strang ⋅ I ⋅ cos ϕ = 3 ⋅ U verk ⋅ I ⋅ cos(60°) = 3 ⋅ U verk ⋅ I ⋅
1
.
2
Beispiel 5.14-2:
Rein induktive symmetrische Last (Bild 5.29a) mit ϕ = ∠( I R , U R ) = 90° (Bild 5.29b):
Gemäß Bild 5.29c ist der erste Phasenwinkel ∠( I R , U RT ) = 60°, während der zweite Winkel
∠( I S , U ST ) = 120° ist:
P1 = Pmax ⋅ cos(60°) = (1 / 2) ⋅ Pmax , P2 = Pmax ⋅ cos(120°) = (−1 / 2) ⋅ Pmax .
a)
b)
c)
Bild 5.29: a) Je Strang: Rein induktive Last mit ϕ = 90°, b) Zeigerdiagramm je Strang, c) Zeigerdiagramm bei
dreiphasiger Sternschaltung (Anwendung der Zweiwattmeter-Methode)
Beide Anzeigen P1 und P2 sind dem Betrag nach gleich groß, jedoch haben sie entgegen
gesetzte Vorzeichen, so dass die Summe P gleich null ist. Es wird ja keine Wirkleistung
verbraucht. Die gesamte Drehstromleistung ist dann
P = P1 + P2 = (1 / 2) ⋅ U verk ⋅ I − (1 / 2) ⋅ U verk ⋅ I = 0
in Übereinstimmung mit
P = 3 ⋅ U strang ⋅ I ⋅ cos ϕ = 3 ⋅ U verk ⋅ I ⋅ cos(90°) = 3 ⋅ U verk ⋅ I ⋅ 0 = 0 .
TU Darmstadt
Institut für elektrische Energiewandlung