Energietechnisches Praktikum II - Home
Werbung

INSTITUT FÜR ELEKTRISCHE MASCHINEN
RHEINISCH-WESTFÄLISCHE TECHNISCHE HOCHSCHULE AACHEN
Energietechnisches Praktikum II
Versuch 3: Permanenterregte Synchronmaschine mit
Polradlagegeber
1 Zweck des Versuchs
1
2 Versuchsvorbereitung
1
2.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
2.2 Aufbau der permanenterregten Synchronmaschine . . . . . . . . . . . .
2
2.3 Feldorientierte Regelung . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
2.3.1 Wirkungweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
2.3.2 Zeigerdiagramme der Synchronmaschine
. . . . . . . . . . . . .
5
2.3.3 Realisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
2.4 Aufgaben zur schriftlichen Versuchsvorbereitung . . . . . . . . . . . . . 11
3 Versuchsdurchführung
12
3.1 Sicherheitshinweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2 Versuchsaufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.3 Zeitlicher Verlauf der Polradspannung . . . . . . . . . . . . . . . . . . . 13
3.4 Zeitlicher Verlauf des Stromes unter wechselnder Belastung . . . . . . . 13
3.5 Zeiger des Stroms und der Polradspannung . . . . . . . . . . . . . . . . 14
3.6 Hochlaufversuch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
0
11.09.02
Permanenterregte Synchronmaschine mit Polradlagegeber
1
ETP II V3
Zweck des Versuchs
In diesem Versuch wird die permanenterregte Synchronmaschine mit feldorientierter
Regelung vorgestellt. Diese Maschine mit geringer Baugröße und hoher Leistung wird
insbesondere als Servomotor eingesetzt.
Im Rahmen des Versuchs wird der zeitliche Verlauf der Polradspannung und des Stromes der Synchronmaschine gezeigt. Mit Hilfe der Raumzeigerdarstellung werden Betrag und Phase der Polradspannung und des Stromes dargestellt. Schließlich wird ein
Hochlaufversuch aufgenommen.
2
2.1
Versuchsvorbereitung
Einführung
Drehstrommaschinen werden als Synchronmotoren mit konstanter und als Asynchronmaschinen mit weitgehend konstanter Drehzahl betrieben, wenn sie am Netz mit
konstanter Frequenz laufen. Früher wurden für drehzahlvariable Antriebe mit dynamischen Anforderungen ausschließlich Kommutatormaschinen eingesetzt, da sie kein
Drehstromnetz mit variabler Frequenz und Spannung benötigen, sondern lediglich ein
Einphasennetz mit einstellbarer Spannung bereitgestellt werden muß. Kommutatormaschinen sind jedoch aufwendiger im Aufbau, weniger überlastfähig und erfordern
Wartung, da Kohlebürsten und Kommutator dem Verschleiß unterliegen.
Durch die Weiterentwicklung auf dem Gebiet der Leistungselektronik ist es inzwischen
möglich, Synchron- und Asynchronmaschinen mit Umrichtern zu speisen, so daß sie
in drehzahlregelbaren Antrieben eingesetzt werden können. Mit Hilfe feldorientierter
Regelungsverfahren können die Nachteile dieser Maschinen im Betrieb am Netz (“Kippen” bei Synchronmaschinen, Drehzahlabhängigkeit von der Belastung bei der Asynchronmaschine) beseitigt werden, so daß die Drehstrommaschinen der Gleichstrommaschine bezüglich ihrer Regelbarkeit nicht mehr nachstehen. Bei Servoantrieben in
Werkzeugmaschinen und Robotern werden hohe Leistungen in kleinem Bauraum mit
hohem Wirkungsgrad umgesetzt. Die Verwendung von Permanentmagneten anstelle
elektrischer Erregung (Gleichstrom- und Synchronmaschinen) ermöglicht Volumenund Gewichtsreduzierung. Bisher wurden hier fast ausschließlich Gleichstrommaschinen eingesetzt, da die elektrische Einspeisung (Umrichter) mit weniger Halbleiterelementen als bei Drehstromspeisung auskommt. Durch den Einsatz schnellschaltender
Leistungshalbleiter in Umrichtern werden heute überwiegend Drehstromantriebe verwendet, da die Zuverlässigkeit und Wartungsfreundlichkeit durch den Wegfall von
Kommutator und Bürsten wesentlich größer ist. Darüber hinaus können diese Motoren einfacher explosionsgeschützt gebaut werden.
1
Permanenterregte Synchronmaschine mit Polradlagegeber
2.2
ETP II V3
Aufbau der permanenterregten Synchronmaschine
Permanent erregte Synchronmaschinen werden im allgemeinen als Innenpolmaschinen gebaut, um ohne Bürsten und Schleifringe auszukommen. Als Magnetwerkstoffe
werden Ferrite oder in neuerer Zeit Selten-Erd- (SE-) Werkstoffe (Samarium-Cobalt,
Neodymium-Eisen-Bor) eingesetzt. Ferrite sind zwar wesentlich billiger als SE-Werkstoffe, jedoch haben sie den Nachteil kleiner Koerzitivfeldstärke und kleiner Remanenzinduktion. Aufgrund der Koerzitivfeldstärke müssen diese Magnete sehr dick sein, um
nicht vom Ständerfeld entmagnetisiert zu werden. Die kleine Remanenzinduktion bedingt eine kleine Luftspaltinduktion, so daß zum Erreichen eines bestimmten Drehmoments der Motor insgesamt größer gebaut werden muß. Dies führt zu einem großen
Rotorträgheitsmoment und reduziert die Dynamik. Um den Anforderungen an hochdynamische Antriebe gerecht zu werden, werden heute in diesem Bereich die oben erwähnten SE-Werkstoffe eingesetzt, die aufgrund ihrer hohen Koerzitivfeldstärke sehr
dünn ausgeführt werden können (typisch 2–5 mm) und zusammen mit einem kleinen
Rotorvolumen, bedingt durch die höhere Remanenzinduktion im Vergleich zu Ferrit, zu
einem kleinen Rotorträgheitsmoment und damit hoher Dynamik führen. Im dynamischen Betrieb und durch die springende Drehdurchflutung bei Speisung mit blockförmigen Strömen kommt es bei diesen Motoren auch im Läufer zu schnellen Flußänderungen. Zur Vermeidung von Wirbelstromverlusten wird der Rotor ebenfalls geblecht
ausgeführt. Die dem Eisen vergleichbare elektrische Leitfähigkeit der SE-Werkstoffe
zwingt dazu, diese Magnete als dünne Stäbchen auf den Rotorgrundkörper aufzukleben. Dagegen haben Ferrite durch ihren hohen elektrischen Widerstand keine Wirbelstromverluste und können als Schalen aufgebracht werden.
N
S
N
X
X
S
NS
SN
S
X
X
S
N
N
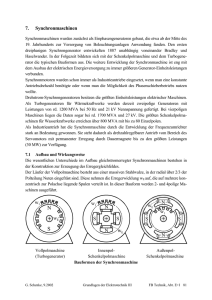
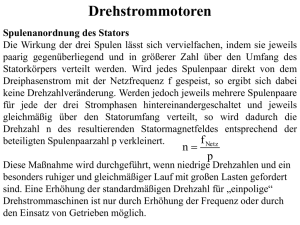
Abbildung 1: Aufbau einer permanent bzw. elektrisch erregten Synchronmaschine
Der Unterschied zur elektrisch erregten Synchronmaschine zeigt sich nur im Rotor; die
Ständer beider Maschinentypen sind identisch aufgebaut.
Im Gegensatz zur herkömmlichen Ausführung, bei der das Feld im Luftspalt radial
verläuft, kann der Motor auch mit axialem Feld aufgebaut werden. In diesem Fall
2
Permanenterregte Synchronmaschine mit Polradlagegeber
ETP II V3
läßt sich der Rotor als dünne Scheibe ausführen, die fast nur aus den Magneten besteht und dadurch ein sehr kleines Trägheitsmoment aufweist. Die Magnete werden
dabei zwischen zwei dünne unmagnetische Stahlscheiben geklebt. Bei neueren Entwicklungen werden sie zur Verminderung von Wirbelstromverlusten nur noch durch
eine Konstruktion aus Glasfaser-verstärktem Kunststoff gehalten. Der Ständer besitzt
in diesem Fall radial verlaufende Nuten, in die die Wicklung eingelegt wird. Meist werden zwei Ständerpakete zu beiden Seiten der Scheibe angeordnet, um den effektiven
Strombelag zu erhöhen.
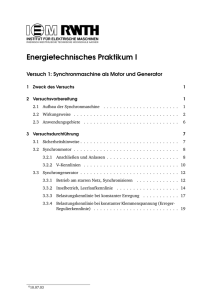
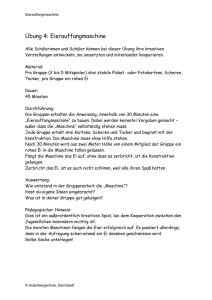
Abbildung 2: Rotor und Stator eines permanenterregten Scheibenläufermotors
Abbildung 2 zeigt einen zerlegten Scheibenläufermotor. Das Ständerpaket ist aus einem aufgewickelten Eisenband mit fortlaufend gestanzten Nuten aufgebaut. Da der
Nutabstand abhängig vom Radius ist, muß dieser beim Stanzen ständig vergrößert
werden. Dieser Umstand und das aufwendige Aufwickeln des Stators sind ein deutlicher Nachteil dieses Maschinentyps gegenüber herkömmlichen Radialfeldmotoren mit
einem Ständer aus geschichteten Blechen.
3
Permanenterregte Synchronmaschine mit Polradlagegeber
2.3
ETP II V3
Feldorientierte Regelung
2.3.1 Wirkungweise
Bei Betrieb der Synchronmaschine am Netz fester Spannung und Frequenz stellt sich
der Polradwinkel abhängig von der Last ein. Treten Lastsprünge auf, kann es zu Pendelungen kommen, die sich ohne dämpfende Elemente, wie z.B. Dämpferwicklungen,
derart aufschaukeln können, daß die Maschine außer Tritt fällt. Wird für drehzahlverstellbare Antriebe ohne Feldorientierung eine frequenzvariable Speisung angewandt,
so darf bei Drehzahländerungen die Frequenz nicht so schnell geändert werden, daß
die Maschine durch die Beharrungskräfte des Trägheitsmomentes außer Tritt fällt. Darüber hinaus kann es durch die Trägheitskräfte auch ohne Last schon zu erheblichen
Pendelungen bei Drehzahlveränderungen kommen.
Um diese Nachteile zu umgehen, wählt man eine Steuerung, die keine starre Versorgungsspannung vorgibt, sondern den Strom in der Maschine in Lage und Größe
regelt, wobei sich die Spannung frei einstellen kann. Dadurch ist es möglich, in der
Synchronmaschine die gleichen Feldverhältnisse wie in einer Gleichstrommaschine zu
erzeugen.
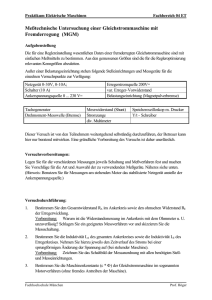
Bei der Gleichstrommaschine wird durch den Kommutator erreicht, daß im Läufer
mit dem erregenden Feld immer
ein Strom fließt, der nach der Formel
das maximal mögliche Drehmoment ergibt. Dies ist der Fall, wenn Erregerfeld und
Ankerdurchflutung senkrecht aufeinander stehen. Die Größe des Drehmoments kann
durch den eingeprägten Strom im Läufer geändert werden.
N
S
x
x
x
x
x
x
x
N
S
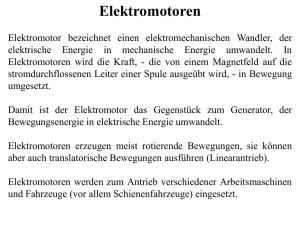
Abbildung 3: Schematischer Aufbau einer Gleichstrommaschine
Im Gegensatz zur in der Regel als Außenpolmaschine ausgeführten permanent erregten Gleichstrommaschine wird die Synchronmaschine als Innenpolmaschine gebaut,
4
Permanenterregte Synchronmaschine mit Polradlagegeber
ETP II V3
um ohne Bürsten auskommen zu können. Will man nun immer mit der optimalen
Feldverteilung für das Drehmoment fahren, so muß der Strombelag im Ständer so
geführt werden, daß Strom I und Induktion
auf jeden Leiter die gleiche Kraft in
Umfangsrichtung erzeugen. Das bedeutet, daß Ständerdurchflutung und Erregerfeld
senkrecht aufeinander stehen.
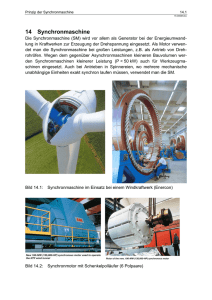
Daraus ergeben sich die in Abbildung 4 dargestellten Stromverteilungen im Stromnulldurchgang jeweils eines Stranges.
X
X
X
X
X
X
X
X
N
S
X
N
S
X
S
N
SN
SN
SN
X
NS
X
N
S
N
X
X
X
N
X
S
S
N
X
X
X
S
N
S
X
X
X
X
X
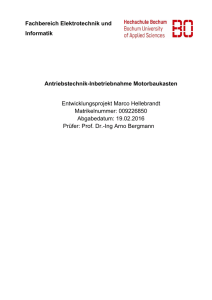
Abbildung 4: Strom- und Feldverteilung in einer permanenterregten Synchronmaschine mit feldorientierter Regelung
Einen derart drehenden Strombelag kann man mit einer 3-phasigen Wicklung erzeugen, d.h. der Ständer einer Synchronmaschine für starres Netz kann übernommen
werden.
Wie Abbildung 4 zeigt, wird der Strombelag in seiner Lage nach der Rotorlage gesteuert. Aus diesem Grund muß die Rotorlage von einem Geber an den Umrichter
übermittelt werden, der dann den Strom entsprechend einstellt.
2.3.2 Zeigerdiagramme der Synchronmaschine
am starren Netz (untererregter Betrieb, R = 0)
vorausgesetzt ist, wird die Klemmenspannung gleich der induzierten SpanDa
nung. Diese wird vom Gesamtfluß
induziert und steht damit bei Vernachlässigung
der Streuung auch senkrecht auf der Gesamtdurchflutung .
5
Permanenterregte Synchronmaschine mit Polradlagegeber
ETP II V3
jXI
U
Ι
Up
Θ ges
ϑ
Θf
U
Θges sin ϑ
Θst sin ε
Up
ε
Θ st
I
Abbildung 5: Motorbetrieb unter Last
Im Betrieb am starren Netz wird die Netzspannung in die reelle Achse gelegt, wobei
sich der Polradwinkel und der Strom je nach Belastung einstellen. Das Moment
berechnet sich zu
"!$# '% ( &'% )*,+ $-
mit m = Anzahl der Stränge (bei Drehstrom m = 3), p = Polpaarzahl.
Also gilt:
/. %'&'% )*,+ 10243 erreicht. Betrachtet man die zugehörigen
Das maximale Moment wird bei Durchflutungen, ergibt sich für das Moment mit der Gesamt- und Erregerdurchflutung:
. 567698 )*,+ oder mit Ständer- und Erregerdurchflutung:
. 9;:;98 )<*,+>=5?
6
Permanenterregte Synchronmaschine mit Polradlagegeber
ETP II V3
bei feldorientierter Regelung
U
jXI
ϑ
I
Θf
Up
Θ ges
Up
U
ε = 90
Θ st
I
Abbildung 6: Zeigerdiagramm für feldorientierte Regelung
Da die Klemmenspannung der Maschine in Lage und Betrag nicht mehr konstant ist,
wird die Polradspannung, wie in Abbildung 6 dargestellt, in die negative imaginäre
Achse gelegt. Jetzt hält die Regelung den Winkel konstant auf 90 , wodurch Strom
und Polradspannung die gleiche Richtung haben. Aus diesem Grund kann die Maschine auch nicht außer Tritt fallen. Die Klemmenspannung U und der Winkel stellen
sich nun abhängig vom Strom I ein. Für das Moment gilt:
=
. 9;:;98 )<*,+@= 9A:A98 B. %'C &
3
Das abgegebene Moment läßt sich also direkt durch den eingeprägten Strom einstellen.
2.3.3 Realisierung
Die Forderung der feldorientierten Regelung nach einem eingeprägten Strom läßt sich
nur mit Hilfe eines Umrichters erfüllen. Der für Kleinmotoren am häufigsten verwendete Typ ist der sogenannte U-Umrichter. In diesem wird aus dem normalen dreioder einphasigen Netz mit einem Gleichrichter eine Gleichspannung erzeugt (daher
U-Umrichter), aus der mit Leistungshalbleitern wieder ein Mehrphasennetz generiert
werden kann.
7
Permanenterregte Synchronmaschine mit Polradlagegeber
ETP II V3
+
R
S
T
(R)
(S)
(T)
Abbildung 7: Schaltung eines U-Umrichters für drei Phasen
Stromformen
Zur Speisung der Maschine werden heute zwei unterschiedliche Stromformen benutzt:
1. Sinusförmige Ströme
Bei Einprägung eines Drehstromsystems mit sinusförmigen Strömen in den einzelnen Phasen ergibt sich ein gleichförmig drehender Strombelag auf dem Umfang des Ständers. Dieser kann so gesteuert werden, daß sich sein Maximum
immer genau über einem magnetischen Pol des Läufers befindet. Dadurch ergibt
sich, daß Läufer- und Ständerdurchflutung immer senkrecht aufeinander stehen.
Dazu ist es allerdings erforderlich, die Lage des Läufers genau zu ermitteln und
der Steuerung mitzuteilen. Derartige Lageerfassungssysteme sind in der Regel
aufwendig. Deshalb versucht man, mit einfacheren Systemen auszukommen.
D E
2. Blockförmige Ströme
D BFGIHKJML
D N>OH'J6L
,
Bei dieser Art der Einspeisung läßt man in den einzelnen Strängen nur
oder
zu. Dadurch ergibt sich jedoch keine gleichförmig umlaufende Durchflutung mehr, sondern es sind nur noch sechs ausgeprägte Stellungen möglich:
i=1
i = -1
Abbildung 8: Mögliche Stromrichtungen bei blockförmigen Strömen
8
Permanenterregte Synchronmaschine mit Polradlagegeber
3
ETP II V3
3
Zwischen den resultierenden Stromzeigern liegen jeweils 60 , so daß der Winkel zwischen Ständerdurchflutung und Rotorlage nicht auf 90 gehalten werden
kann, sondern zwischen 60 und 120 schwankt. Dadurch kommt es bei einer
sinusförmigen induzierten Spannung wegen
zu Momentpendelungen. Lediglich das mittlere Moment ist noch konstant. Diese Pendelungen lassen
sich unterbinden, wenn die induzierte Spannung in einem Strang während der
Dauer des Stromblocks ebenfalls konstant ist, da dann der Anteil in der Momentenformel, der durch
gebildet wird, konstant ist.
3
3
. "698 )*,+@=
P8 )<*Q+@=
B(β )
UP (t)
β, t
i
t
Abbildung 9: Räumliche Induktionsverteilung und zeitlicher Verlauf von Strom und
induzierter Spannung
In Abbildung 9 werden die zeitlichen Verläufe von Strom und induzierter Spannung und der räumliche Verlauf der Induktion mit Polkantenstreuung über eine
Polteilung gezeigt.
Stromeinprägung
Im vorliegenden Versuch wird mit blockförmigen Strömen gearbeitet, die im Toleranzbandverfahren eingeprägt werden. Dieses Verfahren soll am Beispiel eines blockförmigen Stromes in den Phasen R und S anhand von Abbildung 10 beschrieben werden.
9
Permanenterregte Synchronmaschine mit Polradlagegeber
ETP II V3
+
D4
T1
D1
T4
D6
T3
D3
T6
R
D5
S
UP
T2
T
UP
R
D2
T5
UP
S
T
Abbildung 10: Ersatzschaltbild der umrichtergespeisten Maschine
RKS
RT
und . Damit liegt die
Für den Aufbau des Stromes leiten zuerst die Transistoren
Klemme R an positiver und die Klemme S an negativer Zwischenkreisspannung. Durch
die Maschineninduktivitäten in diesem Kreis kommt es zu einem nahezu linearen
Stromanstieg, der von der Differenz aus Zwischenkreisspannung und der induzierten
Spannung verursacht wird. Überschreitet der Strom die obere Toleranzgrenze
,
so werden
und
abgeschaltet und der Strom wird von der Maschineninduktivität durch die Freilaufdioden
und
gegen die Zwischenkreisspannung getrieben.
Dadurch baut sich der Strom bis zum Erreichen der unteren Toleranzgrenze
wieder ab. Jetzt erfolgt wieder das Einschalten der Transistoren, so daß der Strom im
Toleranzband um den Sollwert schwankt.
R$S
RT
Z[S
;U7VW FYX
Z\T
;U7VW N]X
Drehzahlregelung
Eine feldorientiert geregelte Synchronmaschine verhält sich wie eine Gleichstrommaschine, da im Prinzip nur der Kommutator der Gleichstrommaschine durch Polradlagegeber und Wechselrichter bei der Synchronmaschine ersetzt wurde, ohne etwas an
der Feldverteilung zu ändern.
10
Permanenterregte Synchronmaschine mit Polradlagegeber
ETP II V3
Die Drehzahl kann analog zur Gleichstrommaschine nicht direkt, sondern nur über
eine Kaskadenregelung eingestellt werden (Abbildung 11).
Sollwertbegrenzung
und Strommustervorgabe
Drehzahlregler
mit Begrenzung
n soll
Stromwandler
i soll
+
n
Stromregler mit
Begrenzung
+
i
i
i ist
M
Tacho
Last
n ist
Abbildung 11: Kaskadenregelung für Gleichstrommaschine und feldorientiert betriebene Synchronmaschine
Wird von außen eine Drehzahlerhöhung vorgegeben, so vergrößert die Regelung den
eingeprägten Strom und damit das Moment bis zum Maximalwert, d.h. bei konstanter
Last beschleunigt die Maschine. Falls andererseits bei konstanter Drehzahlvorgabe das
Lastmoment erhöht wird, geht zunächst die Drehzahl zurück bis die Regelung den
Strom nachführt und die Maschine so das geforderte Moment aufbringt.
2.4
Aufgaben zur schriftlichen Versuchsvorbereitung
1. Welche Vorteile besitzen Drehstrommaschinen gegenüber Kommutatormaschinen?
2. Welche Vorteile bietet der Einsatz von Permanentmagneten bei der Synchronmaschine?
3. Beschreiben Sie das Prinzip der feldorientierten Regelung.
4. Welche Vorteile bietet die feldorientierte Regelung?
5. Nennen Sie die beiden bei der feldorientierten Regelung üblichen Stromformen
und ihre jeweiligen Vorteile.
6. Warum sind die Magnete einer permanenterregten Synchronmaschine je nach
Magnetmaterial entweder als Schalen oder als kleine Plättchen ausgeführt?
7. Geben Sie die Proportion zwischen dem Trägheitsmoment und dem Rotordurchmesser an. Welche Läuferbauformen resultieren hieraus?
11
Permanenterregte Synchronmaschine mit Polradlagegeber
3
3.1
ETP II V3
Versuchsdurchführung
Sicherheitshinweise
Neben den allgemeinen Sicherheitshinweisen zum Arbeiten im Versuchsfeld ist bei
diesem Versuch insbesondere zu beachten, daß die an der Rückseite des Steuerpults
befindlichen Kurzschlußbügel gefährliche Spannungen führen.
3.2
Versuchsaufbau
Im vorliegenden Versuch soll gezeigt werden, wie sich die Raumzeiger von Strom,
Klemmenspannung und Polradspannung bei der feldorientierten Regelung zueinander
einstellen. Die Raumzeiger können als Striche auf dem Oszilloskop sichtbar gemacht
werden, wobei Größe und Lage den realen Raumzeigern entsprechen. Eine Gleichstrommaschine wird als Antriebsmaschine bzw. als Last eingesetzt.
Die Polradspannung ist aufgrund der einfachen Wicklung der Synchronmaschine (q
= 1) ein direktes Abbild des Luftspaltfeldes. Der zeitliche Verlauf der Polradspannung
läßt sich nur bei von außen angetriebener Maschine messen.
Arbeitet die Maschine unter Last, so kann die Polradspannung nicht mehr direkt gemessen werden, da sie von der Umrichterausgangsspannung überlagert wird. Die Lage
der Polradspannung läßt sich jedoch aus der Polradlage ableiten, die von einem inkrementalen Drehgeber geliefert wird. Aus diesem Signal wird ein Zeiger generiert, der
in der Phasenlage mit der induzierten Spannung übereinstimmt.
Der Strom in den einzelnen Strängen wird induktiv über Meßwandler abgenommen
und die Strangspannungen gegenüber dem Sternpunkt der Maschine über einen Spannungsteiler gemessen. Beide Signale werden elektronisch zur Darstellung auf dem Oszilloskop aufbereitet. Zur Unterdrückung der höherfrequenten Anteile im Meßsignal,
die aus dem Toleranzbandverfahren resultieren, können alle Signale tiefpaßgefiltert
werden.
Zur Messung des Beschleunigungsverhaltens kann die Drehzahl über einen Tachometer zusammen mit dem Stromverlauf auf einem Speicheroszilloskop sichtbar gemacht
werden.
12
Permanenterregte Synchronmaschine mit Polradlagegeber
3.3
ETP II V3
Zeitlicher Verlauf der Polradspannung
Versuchsdurchführung
Im ersten Teilversuch wird der zeitliche Verlauf der Polradspannung dargestellt. Die
Gleichstrommaschine wird hier als Antriebsmaschine eingesetzt.
Auswertung
^`_
Tragen Sie die Amplitude der trapezförmigen Polradspannung für die verschiedenen
Drehzahlen in Tabelle 1 ein. Bestimmen Sie die jeweilige Spannungskonstante
und
deren Mittelwert.
Konstanten:
Gleichungen:
acbId fehg , ^2_ jli k5_ m nporq
%Ks &4t u :wv acbId %Ks x zy
_ {l| jli }2~, jli k5m nporq ^ _ ;S {l|
min
V
V
V
min
500
1000
1500
2000
Tabelle 1: Spannungskonstante
3.4
^4_
Zeitlicher Verlauf des Stromes unter wechselnder Belastung
Versuchsdurchführung
PSM ohne Last
Gezeigt wird der blockförmige Leerlaufstrom einer Phase.
PSM mit Last
Die Gleichstrommaschine wird als Last eingesetzt. Gezeigt wird der Stromverlauf für
verschiedene Drehzahlen.
Auswertung
^ H ;i
pn orq
Bestimmen Sie mit Hilfe von geeigneten Gleichungen und den Ergebnissen aus Teil.
versuch 1 (Abschnitt 3.3) die Drehmomentkonstante
13
Permanenterregte Synchronmaschine mit Polradlagegeber
3.5
ETP II V3
Zeiger des Stroms und der Polradspannung
Versuchsdurchführung
Gezeigt werden Betrag und Phase der Polradspannung und des springenden Stromes
in Raumzeiger-Darstellung. Die Polradspannung wird in diesem Versuch nicht direkt
gemessen, sondern aus der Winkellage des Rotors generiert.
3.6
Hochlaufversuch
Versuchsdurchführung
Bei diesem Versuch werden während des Hochlaufens der Maschine Strom und Drehzahl über der Zeit aufgetragen. Aus der Anstiegszeit kann das Gesamtträgheitsmoment
des Antriebssystems bestimmt werden.
K% \
Auswertung
%$ \ S
%
,
und
abAus den Verläufen für Strom und Drehzahl werden die Größen
gelesen.
und
geben die Spannungs- bzw. Zeitdifferenz des Drehzahlsignals
zwischen
min und
an. Die Spannung
bezeichnet die Amplitude
des Stromsignals.
;U7VW
%
Aus der Drehzahländerung und dem Strom können das Antriebsmoment und das Gesamtträgheitsmoment des Antriebs bestimmt werden. Nach Abzug des auf dem Typenschild angegebenen Trägheitsmoments des Motors ergibt sich das Lastträgheitsmoment.
Bestimmen Sie mit Hilfe der unten angegebenen Konstanten und Gleichungen die in
Tabelle 2 gesuchten Größen.
%
%
5s u :wvpO
\2
Tabelle 2: Hochlaufversuch
Konstanten:
Gleichungen:
5 67^
a 4 J ;:z2^a
a S;< {2| , a ? ,
U:¡Uzv £¢ ?W¤ kg cm
¨ s u :wv a % s
^ H ¨s u :wv
\ ¥ § j"¦ ¦
6 ªC © 67 "! ¥ ¥ _ : 4 J A: F
U:¡Uv
V
min
A
V
14