Kapitel 9 Hamilton
Werbung

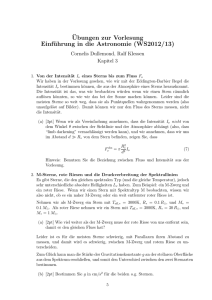
Kapitel 9 Hamilton-Formalismus Die Bedeutung des Hamilton-Formalismus wird erst bei der Beschäftigung mit der Quantenmechanik und der statistischen Mechanik deutlich: In der Quantenmechanik geht der Hamilton-Operator, dessen Eigenfunktionen die stationären Zustände des Systems beschreiben, auf die Hamilton-Funktion zurück. In der statistischen Mechanik wird der Phasenraum durch die Koordinatenachsen für Orte und Impulse aufgespannt. In der Mechanik selbst wird statt des HamiltonFormalismus meist der dazu weitgehend äquivalente Lagrange-Formalismus verwendet. 9.1 Eindimensionale Bewegung Ein System werde durch die verallgemeinerte (oder generalisierte) Koordinate q, die verallgemeinerte Geschwindigkeit q̇ und die Lagrange-Funktion L(q, q̇, t) beschrieben. Später betrachten wir die Erweiterung dieses Ansatzes auf n verallgemeinerte Koordinaten und Geschwindigkeiten. Als verallgemeinerten Impuls (auch kanonischer, generalisierter oder konjugierter Impuls genannt) definieren wir ∂L (9.1) p= ∂ q̇ Alternativ können wir das System jetzt durch die verallgemeinerten Koordinaten q und p und durch die Hamilton-Funktion H(q, p, t) = pq̇(q, p) − L(q, q̇, t) (9.2) beschreiben, wobei wir den Impuls p als unabhängige Koordinate auffassen, die nicht von der Ortskoordinate q abhängt, während q̇ eine Funktion von q und p ist, deren explizite Form nicht bekannt sein muss. Die rechte Seite von (9.2) lässt sich daher ebenfalls als Funktion von q, p und t verstehen. Um aus der HamiltonFunktion Bewegungsgleichungen für q und p abzuleiten, bilden wir zunächst die partiellen Ableitungen von H. Da H(q, p, t) eine Funktion der Ortskoordinate, des 79 Impulses und der Zeit ist, sollte sich auch die rechte Seite von Gleichung (9.2) als Funktion allein von q, p und t schreiben lassen. Falls sich Gleichung (9.1) nach der verallgemeinerten Geschwindigkeit q̇ auflösen läßt, können wir diese explizit als Funktion q̇(q, p) der Ortskoordinate und des Impulses darstellen und dadurch aus der rechten Seite von Gleichung (9.2) eliminieren. Im Allgemeinen wird dies aber nicht möglich sein, so dass wir bei der partiellen Ableitung von Gleichung (9.2) nach q die Kettenregel anwenden müssen: ∂ q̇ ∂L ∂L ∂ q̇ ∂ q̇ ∂L ∂ q̇ ∂L ∂H =p − − =p − −p =− ∂q ∂q ∂q ∂ q̇ ∂q ∂q ∂q ∂q ∂q (9.3) Wir formen den letzten Ausdruck mit Hilfe der Lagrange-Gleichung und der Definition des verallgemeinerten Impulses um, d ∂L ∂L = = ṗ , (9.4) ∂q dt ∂ q̇ und erhalten schließlich ∂H = −ṗ . ∂q (9.5) Auf ganz ähnliche Weise können wir auch die partielle Ableitung nach dem Impuls p berechnen: ∂H ∂ q̇ ∂L ∂ q̇ ∂ q̇ ∂ q̇ = q̇ + p − = q̇ + p − p = q̇ ∂p ∂p ∂ q̇ ∂p ∂p ∂p (9.6) Die partiellen Ableitungen der Hamilton-Funktion nach der Ortskoordinate und dem Impuls bilden zusammen die kanonischen oder Hamiltonschen Gleichungen: ṗ = − ∂H ∂q und q̇ = ∂H . ∂p (9.7) Dies sind zwei Differentialgleichungen 1. Ordnung, die gleichwertig zu der einen Differentialgleichung 2. Ordnung sind, die aus dem Lagrange-Formalismus folgt. 9.1.1 Nicht-relativistisches Teilchen im Potential Als Beispiel betrachten wir ein nicht-relativistisches Teilchen der Masse m, das sich im Potential V (x) längs der x-Achse bewegt und durch die LagrangeFunktion m (9.8) L(x, ẋ) = ẋ2 − V (x) 2 beschrieben wird. Der verallgemeinerte Impuls lautet in diesem Fall p=− ∂L = mẋ , ∂ ẋ 80 (9.9) und für die Hamilton-Funktion erhalten wir nach Definition m p2 2 H(x, p) = pẋ − ẋ − V (x) = + V (x) . 2 2m (9.10) Mit der Definition der Kraft F (x) = − ∂V (x) ∂x (9.11) und der ersten kanonischen Gleichung erhalten wir die Bewegungsgleichung ṗ = − ∂H = F (x) , ∂x (9.12) die dem zweiten Newtonschen Gesetz entspricht. Die zweite kanonische Gleichung liefert in diesem Fall nichts Neues, nämlich nur die Darstellung von p in Abhängigkeit von ẋ. 9.2 Zeitabhängigkeit Wir betrachten zunächst die partielle Zeitableitung von H: ∂ q̇ ∂L ∂ q̇ ∂L ∂H =p − − . ∂t ∂t ∂ q̇ ∂t ∂t (9.13) Ein Blick auf die Definition (9.1) des verallgemeinerten Impulses macht deutlich, daß die ersten beiden Terme in Gleichung (9.13), p ∂ q̇ ∂L ∂ q̇ − , ∂t ∂ q̇ ∂t (9.14) sich aufheben, woraus folgt, daß die partiellen Zeitableitungen von H und L bis auf das Vorzeichen übereinstimmen: ∂H ∂L =− . ∂t ∂t (9.15) Daraus und aus den kanonischen Gleichungen gewinnen wir die totale Zeitableitung dH ∂H ∂H ∂H ∂H ∂L = q̇ + ṗ + = −ṗq̇ + q̇ ṗ + =− . (9.16) dt ∂q ∂p ∂t ∂t ∂t Die Hamilton-Funktion ist also genau dann eine Erhaltungsgröße, wenn sie nicht explizit von der Zeit abhängt, oder was äquivalent ist, wenn die LagrangeFunktion nicht explizit von der Zeit abhängt. Bei abgeschlossenen Systemen ist dies aufgrund der Homogenität der Zeit immer der Fall, und in diesem Fall ist die Hamilton-Funktion, die wir später mit der gesamten Energie des Systems identifizieren werden, eine Erhaltungsgröße. 81 9.3 Hamilton-Funktion mit vielen Freiheitsgraden Wir können den Hamilton-Formalismus leicht auf ein System mit vielen Freiheitsgraden übertragen. In diesem Fall beschreiben wir das System durch n verallgemeinerte Koordinaten q1 , . . . , qn und Geschwindigkeiten q̇1 , . . . , q̇n und durch die Lagrange-Funktion L(q1 , . . . , qn , q̇1 , . . . , q̇n , t). Als verallgemeinerte (oder kanonische) Impulse definieren wir ∂L , (9.17) pj = ∂ q̇j und die Hamilton-Funktion lautet jetzt H(q1 , . . . , qn , p1 , . . . , pn , t) = n pj q̇j − L(q1 , . . . , qn , q̇1 , . . . , q̇n , t) . (9.18) j=1 Partielle Ableitung von Gleichung (9.18) nach der Ortskoordinate qk liefert ∂H ∂qk n n n n ∂L ∂L ∂ q̇j ∂ q̇j = pj − − ∂q ∂q ∂ q̇j ∂qk k k j=1 j=1 ∂L ∂ q̇j ∂ q̇j = pj − − pj ∂q ∂q ∂qk k k j=1 j=1 ∂L ∂qk d ∂L = − dt ∂qk = −ṗk , = − (9.19) und für die partiellen Ableitungen nach den Impulsen pk erhalten wir n n ∂ q̇j ∂L ∂ q̇j ∂H = q̇k + pj − ∂pk ∂p ∂ q̇j ∂pk k j=1 j=1 = q̇k + n n pj j=1 ∂ q̇j ∂ q̇j − pj ∂pk j=1 ∂pk = q̇k . (9.20) Die kanonischen Gleichungen lauten schließlich ṗk = − ∂H ∂qk und q̇k = ∂H ∂pk für k = 1, . . . , n (9.21) Wie man leicht zeigen kann, ist die Hamilton-Funktion auch im Fall von n Freiheitsgraden genau dann eine Erhaltungsgröße, also zeitlich konstant, wenn die Lagrange-Funktion nicht explizit von der Zeit abhängt. 82 9.4 Kovariante Hamilton-Funktion Um eine offensichtlich kovariante (wir sagen auch manifest kovariante Formulierung der Hamilton-Funktion zu erhalten, nehmen wir die Lagrange-Funktion (8.29) als Ausgangspunkt: 1 L = muµ uµ . (9.22) 2 Die Komponenten des konjugierten Viererimpulses lauten dann pµ = ∂L = muµ ∂uµ (9.23) und die Vierergeschwindigkeit in Abhängigkeit vom konjugierten Viererimpuls lautet dann pµ uµ = . (9.24) m Wir ersetzen nun die Vierergeschwindigkeit uµ in eine kovariante Definition der Hamilton-Funktion, H(xµ , pµ , τ ) = pν uν (xµ , pµ ) − L (xµ , uµ (xν , pν ), τ ) (9.25) ein, und erhalten die gesuchte kovariante Form H= pµ pµ pµ pµ pµ pµ − = m 2m 2m (9.26) der Hamilton-Funktion eines freien Teilches in Abhängigkeit von Ort und Impuls. Diese manifest kovariante Hamilton-Funktion ist selbstverständlich ebensowenig eindeutig wie die Lagrange-Funktion. So ändert beispielsweise die Addition eines konstanten Ausdrucks zur Hamilton-Funktion die Bewegungsgleichungen nicht. Wir schreiben die erste Gruppe der Hamiltonschen Gleichungen (9.21) in manifest kovarianter Form, indem wir die Zeitableitung als Ableitung nach der Eigenzeit τ schreiben, ∂pµ ∂H =− =0 (9.27) ∂τ ∂xµ und erhalten so die Bewegungsgleichung ∂pµ =0 ∂τ (9.28) für das freie Teilchen. Die zweite Gruppe der Hamiltonschen Gleichungen, ∂H pµ ∂xµ = = , ∂τ ∂xµ m (9.29) liefert uns in diesem Beispiel nichts Neues, nämlich nur den schon bekannten Zusammenhang zwischen der Geschwindigkeit und dem Impuls. 83 Die oben betrachtete manifest kovariante Darstellung der Hamilton-Funktion läßt sich offenbar nicht für ein System mit mehreren Teilchen verallgemeinern, denn diese werden, sofern sie sich gegeneinander bewegen können, keine gemeinsame Eigenzeit besitzen. Daher betrachten wir nun die Hamilton-Funktion in einem beliebigen Inertialsystem S’, das nicht das Ruhesystem des Teilchens sein muß. Wir nehmen an, daß die Wirkung unabhängig von der Wahl des Koordinatensystems ist, was eine hinreichende, wenn auch nicht notwendige Voraussetzung dafür ist, daß die Bewegungsgleichungen in S’ die gleiche Form wie im Ruhesystem des Teilchens haben. Zur Vereinfachung wählen wir S’ so, daß sich das Teilchen momentan mit der Geschwindigkeit v entlang der x′1 -Achse bewegt. Es muß dann gelten: S = L dτ = L′ dt = S ′ . (9.30) Mit dt = γdτ folgt daraus 1 L′ = γ −1 L = mu′µ u′µ 2 1 v2 1 − 2 = mc2 c 2 1− v2 c2 (9.31) Diese Wahl für die Lagrange-Funktion hat den Nachteil, daß der konjugierte Impuls für positive Geschwindigkeiten ein negatives Vorzeichen bekommt. Wir möchten, daß der konjugierte Impuls eines freien Teilchens für kleine Geschwindigkeiten mit dem klassischen Impuls p = mv zusammen fällt. Deshalb nutzen wir die Freiheit aus, die Lagrange-Funktion mit einem beliebigen Faktor zu multiplizieren (in diesem Fall mit −2), ohne daß die Bewegungsgleichung sich ändert. Wir verwenden daher die Lagrange-Funktion v2 (9.32) L = −mc2 1 − 2 c und erhalten so den konjugierten Impuls p= v ∂L = −mc2 γ − 2 = mγv . ∂v c und die Hamilton-Funktion (9.33) mc2 . (9.34) γ Zur besseren Lesbarkeit verwenden wir nur ungestrichene Größen, obwohl wir das beliebig gewählte Inertialsystem mit S’ bezeichnet hatten. Um die HamiltonFunktion ausschließlich als Funktion des Impulses schreiben zu können (vom Ort darf H nicht abhängen, da das Teilchen frei sein soll), müssen wir γ und v ebenfalls als Funktionen von p schreiben. Aus der Definition von γ erhalten wir durch Quadrieren und Neuordnen v2 2 γ 1− 2 =1, (9.35) c H = pv + 84 woraus durch geeignete Umformung m2 γ 2 = m2 + (mγv)2 p2 2 = m + c2 c2 (9.36) folgt. Wir können jetzt v und γ in Gleichung (9.34) durch Ausdrücke, die nur vom Impuls abhängen ersetzen und die Hamilton-Funktion in der Form (9.37) H = m2 c4 + p2 c2 schreiben. Da die Lagrange-Funktion nicht explizit von der Zeit abhängt, ist H für das freie Teilchen zeitlich konstant. In einem Inertialsystem, in dem das Teilchen kleine Geschwindigkeiten und damit auch kleine Impulse p ≪ mc besitzt, gilt näherungsweise p2 . (9.38) H ≈ mc2 + 2m Für kleine Geschwindigkeiten und Impulse entspricht H also, bis auf einen konstanten Term, der klassischen kinetischen Energie p2 /2m. Wir identifizieren den Ausdruck H = m2 c4 + p2 c2 (9.39) als relativistische Energie eines freien Teilchens. Im Ruhesystem des Teilchens verschwindet sein Impuls, und die Energie des freien Teilchens, in diesem Fall Ruheenergie genannt, lautet E0 = mc2 . (9.40) Da sich wie oben festgestellt die Bewegungsgleichung nicht ändert, wenn der Lagrange- oder der Hamilton-Funktion eine Konstante hinzugefügt wird, stellt sich die Frage, ob die Ruheenergie (9.40) irgendeine physikalische Bedeutung hat. Tatsächlich wäre der Ausdruck mc2 aber nur dann eine Konstante, wenn die Ruhemasse eine Erhaltungsgröße wäre. Dies ist aber nicht der Fall: die Summe aller Ruhemassen kann sich im Laufe der Zeit ändern. Nach Gleichung (9.40) ist jede Änderung der Ruhemasse mit einer Änderung der Ruheenergie des Teilchens verbunden, das heißt es gilt ∆E0 = ∆mc2 . (9.41) Wenn wir fordern, daß ein Teilchen dessen Ruhemasse gegen Null strebt, auch eine gegen Null strebende Ruheenergie haben soll, dann ist die Energie (9.39) eindeutig festgelegt. Gleichung (9.40) sagt uns, daß ein zusammengesetztes Teilchen, bei dessen Bildung Energie freigesetzt wurde, eine geringere Ruhemasse als die Summe der Ruhemassen seiner Bestandteile hat. Diese Beobachtung wird auch als Massendefekt bezeichnet und läßt sich etwa bei der Verschmelzung von zwei Deuteriumkernen zu einem Heliumkern beobachten. Grundsätzlich hat auch ein Wasserstoffmolekül eine geringere Masse als die Summe der Massen zweier getrennter 85 Wasserstoffatome. Infolge der im Vergleich zur Kernfusion deutlich geringeren Bindungsenergie ist der Massendefekt bei der Bildung des Wasserstoffmoleküls jedoch viel schwerer zu beobachten. Gleichung (9.40) sagt uns auch, daß ein energetisch angeregtes Teilchen träger ist als ein gleiches Teilchen im Grundzustand. Der Begriff der Ruheenergie ist auch von Bedeutung, wenn man versucht die Masse eines elementaren Teilchens aus seinen Wechselwirkungen zu verstehen. Die in (9.39) formulierte Energie eines freien Teilchens interpretieren wir als Summe H = E0 + T aus der Ruheenergie E0 und der kinetischen Energie T . Die kinetische Energie muß dann die Form (9.42) T = m2 c4 + p2 c2 − mc2 haben, oder, in Abhängigkeit von der Geschwindigkeit v: T = mc2 (γ − 1) . (9.43) Daraus wird offensichtlich, daß sich die relativistische Lagrange-Funktion nicht als Differenz zwischen kinetischer und potentieller Energie schreiben läßt. Für kleine Geschwindigkeiten kann der Lorentz-Faktor γ durch den Ausdruck γ ≈1+ 1 v2 2 c2 für |v| ≪ c (9.44) angenähert werden und die kinetische Energie hat den aus der nichtrelativistischen Mechanik bekannten Wert T = m 2 v 2 für |v| ≪ c . (9.45) Wenn das Teilchen mit seiner Umgebung wechselwirkt, müssen wir zur Lagrange-Funktion (9.32) einen Term −V hinzufügen, der diese Wechselwirkung beschreibt. Wenn die Wechselwirkung derart ist, daß V sich als Funktion der Ortskoordinate x schreiben läßt, verschwindet die partielle Ableitung von V nach ẋ, so daß der konjugierte Impuls weiterhin die Form p = γmẋ hat. Die relativistische Hamilton-Funktion eines Teilchens in einem äußeren Potential V lautet dann (9.46) H = m2 c4 + p2 c2 + V . 9.5 Die elektromagnetische Masse Wir versuchen, uns an einem besonders einfachen Modell des Elektrons zu veranschaulichen, wie die Energie EC einer Ladungsanordnung zu deren Ruhemasse beiträgt. Unter der Energie der Ladungsanordnung verstehen wir dabei die Arbeit, die geleistet werden muss, um die einzelnen Ladungsbestandteile aus dem 86 Unendlichen an die Positionen zu bringen, die sie in der gewählten Ladungsanordnung einnehmen. Wir setzen dabei voraus, dass zwischen zwei Ladungen qA und qB an den Orten rA und rB die Coulomb-Kraft FC,A = qA qB rA − rB 4πε0 |rA − rB |3 (9.47) auf die Ladung A wirkt. Die Kraft auf Ladung B ergibt sich durch Vertauschung der Indizes. Abbildung 9.1: Einfaches Modell für ein beschleunigtes Elektron: Selbstwechselwirkung führt zur Trägheit Unser einfaches Elektronenmodell besteht nun aus einer Hantel der Länge d, die senkrecht zur x-Achse angeordnet ist, und an deren beiden Enden (A und B genannt, siehe Abbildung 9.1) jeweils die Ladung qA = qB = e/2 tragen. Diese Hantel soll fortwährend gleichförmig mit a in positive x-Richtung beschleunigt werden. Dieses Modell lässt sich besonders einfach in einem Inertialsystem untersuchen, in dem die Hantel zum Zeitpunkt t0 = 0 im Ursprung ruht. Die in diesem Bezugssystem abgeleiteten Ergebnisse hängen aber nicht von der günstigen Wahl des Koordinatensystems ab, da die physikalischen Gesetze in jedem Inertialsystem gelten, also invariant gegenüber einer Geschwindigkeitstransformation sind. Zu einem beliebigen Zeitpunkt t haben die beiden Hantelenden A und B dann die Positionen 2 2 d at d at ,+ ,0 und rB (t) = ,− ,0 . (9.48) rA (t) = 2 2 2 2 Da die Hantel zum Zeitpunkt t0 in unserem Inertialsystem ruht, wirkt zu diesem Zeitpunkt auch nur die Coulomb-Kraft (9.47) und nicht die Lorentz-Kraft, die man im Fall einer allgemeinen Bewegung ebenfalls berücksichtigen müsste. Wir werden im Folgenden immer wieder davon Gebrauch machen, dass wir die Hantellänge d sehr klein wählen wollen, so dass wir bei allen Ausdrücken, die sich als Potenzreihe von d darstellen lassen, alle Potenzen außer der niedrigsten vernachlässigen können. Voraussetzung für die Entstehung der elektromagnetischen Masse des Elektrons ist die Endlichkeit der Lichtgeschwindigkeit c, die die Ausbreitung aller 87 Wechselwirkungen beschränkt. Aus diesem Grund dürfen wir bei der Berechnung der Coulomb-Wechselwirkung zwischen den Ladungen A und B nicht deren augenblickliche Positionen verwenden, sondern müssen berücksichtigen, dass die Ladungen während der Ausbreitung der Coulomb-Kraft ihre Positionen verändert haben. Die Coulomb-Kraft, die das Hantelende A am Ort rA (t0 ) zur Zeit t0 = 0 spürt, wird also durch das Hantelende B am Ort rB (tr ) zu einer früheren Zeit tr < 0 (häufig als retardierte Zeit bezeichnet) hervorgerufen. Zum Zeitpunkt t0 sieht“ die Hantel ihre vergangene Position in Beschleunigungsrichtung vor sich ” liegen und wird von dieser zurückgestoßen. Die endliche Ausbreitungsgeschwindigkeit der Coulomb-Kraft führt also dazu, dass die geladene Hantel von der Coulomb-Kraft ihrer eigenen Vergangenheit gebremst wird. Die retardierte Zeit tr wird durch die Beziehung c2 t2r = r2 (9.49) festgelegt, wobei r = |rA (t0 ) − rB (tr )| (9.50) der Abstand zwischen der augenblicklichen Position von A und der retardierten Position von B ist. Dieser Abstand hängt von der Hantellänge d und der Strecke at2r (9.51) 2 ab, die die Hantel innerhalb des Zeitintervalls |tr | zurücklegt. Wir dürfen in Gleichung (9.51) unbesorgt das Weg-Zeit-Gesetz der klassischen Mechanik verwenden, da unsere Hantel für genügend kleines d und damit, wie wir gleich sehen werden, auch kleines tr nur sehr kleine Geschwindigkeiten erreicht. Im Folgenden zeigen wir auf sehr einfache Weise, wie wir den Abstand r für kleine Hantellängen d annähern können. Eine strengere Betrachtung, die zum gleichen Ergebnis führt, findet sich im Anhang (A.4). Wenn wir jetzt grundsätzlich voraussetzen, dass sich die retardierte Zeit tr und der Abstand r als Potenzreihen von d schreiben lassen, dann müssen die konstanten Terme verschwinden, nicht aber die linearen Terme. Andernfalls hätten wir einen Widerspruch für den Grenzfall verschwindender Beschleunigung (a = 0), denn in diesem Fall ruht die Hantel im Ursprung (ℓ = 0), und die Coulomb-Kraft muss sich nur entlang der Hantel ausbreiten, so dass exakt tr = d/c und r = d gelten. Wird die Beschleunigung von Null verschieden (a > 0), muss aufgrund der Bewegung der Hantel (ℓ > 0) die retardierte Zeit größer werden, da sich jetzt die Coulomb-Kraft über einen größeren Abstand r > d ausbreiten muss. Für sehr kleine Hantellängen d können wir aber weiterhin zumindest näherungsweise ℓ= d und r ≈ d (9.52) c schreiben, da die Korrekturen von höherer Ordnung in d sein müssen. Bildlich gesprochen bewegt sich das Licht viel schneller als die Hantel, so dass die Bewegung der Hantel in erster Näherung keine Rolle spielt. Für die von der Hantel tr ≈ 88 zurückgelegte Strecke ℓ verschwindet der lineare Term, so dass die erste nichttriviale Näherung von der Ordnung 2 oder höher ist. Mit Hilfe der Gleichungen (9.51) und (9.52) kommen wir zu der Näherung ad2 . 2c2 ℓ≈ (9.53) Wir berechnen jetzt die Coulomb-Kraft, die Hantelende B auf Hantelende A ausübt. Dabei interessiert uns nur die x-Komponente dieser Kraft, denn aus Symmetriegründen müssen die y- und z-Komponenten verschwinden. Mit Hilfe von Gleichung (9.47) erhalten wir Fx,A = − (e/2)2 ℓ , 4πε0 r3 (9.54) denn −ℓ ist die x-Komponente des Vektors (rA − rB ). Wegen (9.52) und (9.53) dürfen wir für kleine d auch Fx,A = − e2 a 16πε0 2dc2 (9.55) schreiben. Die Kraft auf das Hantelende B muss aus Symmetriegründen gleich groß sein, so dass insgesamt auf die Hantel eine Kraft mit der x-Komponente Fx = − e2 a 16πε0 dc2 (9.56) wirkt, die der Beschleunigung entgegengesetzt ist. Nehmen wir an, die ungeladene Hantel habe eine Masse m0 und es wirke die äußere Kraft Fext , so dass nach dem zweiten Newtonschen Gesetz Fext = m0 a (9.57) gilt. Wird die Hantel nun geladen, muss auf der linken Seite von Gleichung (9.57) zu der äußeren Kraft noch die Coulomb-Wechselwirkung der Hantel mit sich selbst, Fx , hinzugefügt werden, so dass wir Fext + Fx = m0 a oder Fext = e2 m0 + 16πε0 dc2 (9.58) a (9.59) erhalten. Den zweiten Term im Klammerausdruck können wir als elektromagnetische Masse e2 mem = (9.60) 16πε0 dc2 89 interpretieren, die durch die Coulomb-Wechselwirkung der Hantel mit sich selbst entsteht. Es fällt auf, dass der Ausdruck für mem Ähnlichkeit mit der potentiellen Energie EC der Hantel hat. Diese potentielle Energie ist gleich der Arbeit d 1 (e/2)2 W =− dr , (9.61) r2 ∞ 4πε0 die wir leisten müssen, um zwei Ladungen e/2 aus dem Unendlichen bis auf den Abstand d aneinander heranzubringen. Die Auswertung des Integrals liefert EC = e2 , 16πε0 d (9.62) so dass wir die Masse mem auch in der Form mem = EC c2 (9.63) schreiben können. Wenn wir unsere Hantel als einfaches Modell für das Elektron verstehen und annehmen, die Elektronenmasse me rühre nur von der Selbstwechselwirkung der Ladungsbestandteile des Elektrons her, dann können wir Gleichung (9.60) verwenden, um mit d= e2 ≈ 7 × 10−16 m 16πε0 me c2 (9.64) den Radius des Elektrons abzuschätzen (dieser Wert ist um den Faktor 4 kleiner als der in der Literatur häufig angeführte klassische“ Elektronenradius, der sich ” aus einem Kugelmodell ergibt). Das einfache Hantelmodell liefert auf den ersten Blick mit Gleichung (9.63) einen mit der Speziellen Relativitätstheorie konsistenten Ausdruck für den Teil der Elektronenmasse, der aus der Wechselwirkung der Elektronenladung mir ihrem eigenen Feld herrührt. Doch offenkundig hat dieses Modell große Schwächen. So unterscheidet sich die für eine longitudinal bewegte Hantel erhaltene Masse mem um einen Faktor 2 von der hier für unsere transversal bewegte Hantel erhaltenen Masse [?]. Für das realistischere (und deutlich aufwändiger zu berechnende) Modell einer homogen geladenen Kugel erhält man einen unerwünschten Faktor 3/4 in Gleichung (9.63). Unbefriedigend ist auch der durch Gleichung (9.64) abgeschätzte Elektronenradius, der deutlich größer als die experimentelle Obergrenze für eine mögliche Ausdehnung des Elektrons ist, die derzeit bei etwa 10−19 m liegt. Schreibt man die gesamte Masse des Elektrons in der Form me = m0 + mem , (9.65) so erfordert ein derart kleiner Elektronenradius eine negative Masse m0 für das ungeladene“ Elektron. Nimmt man das Elektron gar als punktförmig an, lässt ” 90 also d gegen Null streben, divergiert die Masse mem . Diese Divergenz lässt sich auch durch eine quantenmechanische Behandlung des Problems nicht beheben. In der Quantenelektrodynamik wendet man die Methode der Renormierung an, um trotz solcher Divergenzen zu berechenbaren Größen zu kommen. Dabei geht man davon aus, dass sich die Beiträge m0 und mem ebenso wie die Kopplung des Elektrons mit dem elektrischen Feld nicht einzeln beobachten lassen. Diese Größen dürfen divergieren, wenn d beliebig klein wird, solange man endliche Werte für die beobachtbaren Größen, wie die Elementarladung e und die Elektronenmasse me erhält. 9.6 Erhaltungsgrößen Eine verallgemeinerte Koordinate qk , die nicht explizit in der Lagrange-Funktion vorkommt, wird als zyklische Koordinate bezeichnet. Für eine zyklische Koordinate qk ist ∂H ∂L = 0 und damit =0 . (9.66) ∂qk ∂qk Der zu einer zyklischen Koordinate qk konjugierte Impuls pk ist eine Erhaltungsgröße, denn nach den kanonischen Gleichungen (9.21) gilt ṗk = − ∂H =0. ∂qk (9.67) Nach Möglichkeit wird man daher für die Beschreibung eines Systems die verallgemeinerten Koordinaten qi so zu wählen suchen, dass möglichst viele Koordinaten zyklisch sind, da für jede zyklische Koordinate eine Differentialgleichung weniger gelöst werden muss. Für abgeschlossene Systeme von Teilchen, auf die keine äußeren Einflüsse vorhanden sind, lassen sich aus den Grundannahmen von der Homogenität von Raum und Zeit und von der Isotropie des Raumes sowie aus dem Relativitätsprinzip sieben Erhaltungsgrößen bestimmen: • Wegen der Homogenität der Zeit hängt die Lagrange-Funktion nicht explizit von der Zeit ab, und die daraus folgende zeitliche Konstanz der HamiltonFunktion entspricht dem Energieerhaltungssatz. • Wenn qi eine von drei generalisierten Koordinaten ist, die die Lage des Massenmittelpunktes des Systems beschreiben, dann muss qi eine zyklische Koordinate sein, andernfalls wäre der Raum nicht homogen. Die zu qi konjugierte Impulskoordinate pi ist dann zeitlich konstant. Da dies für alle drei Impulskoordinaten des Massenmittelpunktes gilt, ist der Gesamtimpuls des Systems eine vektorielle Erhaltungsgröße. 91 • Wenn die Winkelkoordinate qj eine von drei generalisierten Koordinaten ist, die die Orientierung des Systems von Teilchen im Raum festlegen, dann muss qj aufgrund der Isotropie des Raumes ebenfalls eine zyklische Koordinate sein. Die zu qj konjugierte Impulskoordinate pj ist dann zeitlich konstant und hat die Dimension eines Drehimpulses. Alle drei zu den zyklischen Winkelkoordinaten konjugierten Impulse bilden zusammen eine weitere vektorielle Erhaltungsgröße, den Gesamtdrehimpuls. • Nach dem Relativitätsprinzip gibt es keine absoluten Geschwindigkeiten, so dass die Lagrange-Funktion nicht von der Geschwindigkeit des Massenmittelpunktes abhängen sollte (zumindest gibt es immer eine LagrangeFunktion, die nicht von dieser Geschwindigkeit abhängt und zu den gleichen Bewegungsgleichungen führt). Die drei Impulskoordinaten, die die Geschwindigkeit des Massenmittelpunktes beschreiben, sind daher zyklisch, woraus jedoch keine neuen Erhaltungsgrößen folgen. Eine Aussage, die die oben angestellten Betrachtungen verallgemeinert, wurde von der Mathematikerin Emmy Noether abgeleitet. Das nach ihr benannte Noether-Theorem sagt aus, dass sich aus jeder einparametrigen Symmetrieoperation, die für ein System erlaubt ist, eine Erhaltungsgröße für das System ergibt. 9.7 Zusammenfassung Der Hamilton-Formalismus ist weitgehend äquivalent zum LagrangeFormalismus. Nach der Definitionsgleichung (9.2) erhält man nach Definition der kanonischen (oder konjugierten) Impulse pj = ∂L ∂ q̇j (9.68) die Hamilton-Funktion H(q1 , . . . , qn , p1 , . . . , pn , t) = n pj q̇j − L(q1 , . . . , qn , q̇1 , . . . , q̇n , t) (9.69) j=1 aus der Lagrange-Funktion. Umgekehrt kann man die Lagrange-Funktion aus der Hamilton-Funktion gewinnen, sofern man die kanonischen Gleichungen ṗk = − ∂H ∂qk und q̇k = ∂H ∂pk für k = 1, . . . , n (9.70) nach den verallgemeinerten Geschwindigkeiten q̇k auflösen kann. In diesem Fall führen die kanonischen Gleichungen und die Lagrange-Gleichungen zu denselben Bewegungsgleichungen. 92 Die Hamilton-Funktion eines Teilchens kann als Gesamtenergie des Teilchens interpretiert werden und ist dadurch, anders als die Lagrange-Funktion, eine messbare Größe. Der Hamilton-Formalismus ist besonders geeignet, um Symmetrieeigenschaften des untersuchten Systems für die Aufstellung der Bewegungsgleichungen zu nutzen. Im Fall von Symmetrieen lassen sich verallgemeinerte Koordinaten derart wählen, dass die Lagrange-Funktion nicht von ihnen abhängt. Solche Koordinaten werden dann als zyklische Koordinaten bezeichnet und die zugehörigen Impulse sind Erhaltungsgrößen, ändern sich also im Verlauf der Zeit nicht. Ein systematisches Verfahren, geeignete zyklische Koordinaten zu finden, stellt die Hamilton-Jacobi-Theorie dar, die hier nicht behandelt wurde. Die Hauptanwendungsgebiete des Hamilton-Formalismus sind die statistische Physik und die Quantenmechanik, in der die Hamilton-Funktion zum HamiltonOperator verallgemeinert wird. 93