(Maschinenbau) (WS 13/14)
Werbung
 (WS 13/14)")
Ergänzungsübungen zur Physik für Ingenieure
(Maschinenbau) (WS 13/14)
Prof. W. Meyer
Übungsgruppenleiter: A. Berlin & J. Herick (NB 2/28)
Ergänzung G
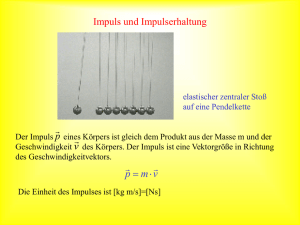
Impuls
Um den Impuls in Worten zu beschreiben gibt es viele Ansätze. Ein sehr schöner Ansatz ist:
Der Impuls ist ein Maß für die Schwierigkeit einen
Körper in den Ruhezustand zu versetzen.
Der Impuls ist das Produkt aus Masse mal Geschwindigkeit
p~ = m ~v
und ist, wie die Geschwindigkeit, ein Vektor. Dabei entspricht die Richtung des Impulses immer der
der Geschwindigkeit der Masse.
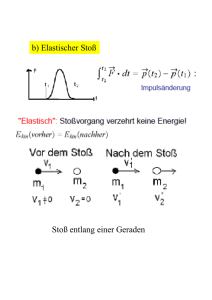
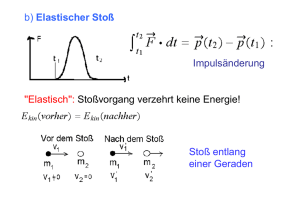
Wie bereits in der Vorlesung gezeigt, ist die Änderung des Impulses ein Resultat einer kurzzeitigen
Krafteinwirkung. Dies führt zu der ursprünglichen Formulierung der Beziehung zwischen Kraft und
Impuls von Newton.
d~
p
F~ =
dt
Setzt man nun den Impuls ein, so muss das totale Differential des Impulses gebildet werden.
d~
p
d
F~ =
= (m~v )
dt
dt
P roduktregel
=
d
d
(m) · ~v + m · ~v
dt
dt
Man sieht hier, dass sowohl eine Änderung der Masse, als auch eine Änderung der Geschwindigkeit
nach der Zeit, mit einer Kraft verbunden ist.
Die Änderung der Geschwindigkeit nach der Zeit ist die Beschleunigung; und wenn die Masse zeitlich
konstant bleibt, erhält man den gewohnten Ausdruck für die Kraft.
F~ =
d
(m)
|dt{z }
· ~v + m ·
=0, für m=const.
d
~v = m~a
dt
|{z}
~a
Der Impuls ist neben der Energie eine weitere wichtige Erhaltungsgröße in der Physik.
Der Gesamtimpuls (die Summe aller Impulse), in einem
abgeschlossenen System,
bleibt zeitlich konstant.
P
p~i = const.
i
Besonders bei der Bewegung in mehreren Raumrichtungen muss man hier den vektoriellen Charakter
der Impulse berücksichtigen.
Das Hauptanwendungsgebiet des Impulses ist die Betrachtung der Wechselwirkungen zwischen zwei
oder mehreren Körper durch Stöße; sei es klassisch durch Kollision makroskopischer Körper, wie z.B.
bei Billardkugeln, oder mikroskopischer Teilchen, wie z.B. bei Atomkerne (in der Quantenmechanischen Betrachtung).
1
Wir bleiben jedoch bei der klassischen Mechanik und der Klassifizierung der Stöße. Man unterscheidet
zwischen zwei extremen Varianten von Stößen; ein realer Stoß ist dabei immer eine Mischung dieser
beiden Stoßvarianten.
Das eine Extrem ist der vollkommene elastische Stoß.
Bei einem elastischen Stoß ist sowohl die Energie als auch der Impuls, bezüglich der Bewegung, erhalten. Also:
X
X
Ekin,i = const.
und
p~i = const.
i
i
Das andere Extrem ist der vollkommene inelastische Stoß.
Hier ist auch der Impuls erhalten, jedoch gilt dies nicht für die Energie, bezogen auf die
Bewegung. Also:
nachher
vorher
X
zX }| { zX
}|
{
′
Ekin,i =
Ekin,i + ∆E
und
p~i = const.
i
i
i
∆E ist somit die Energiedifferenz, die nach dem Stoß für die Bewegung verloren ist. Typischerweise
wird diese verlorene Energie in Form von Wärmeenergie (Reibung) oder Verformungsenergie der Körper umgewandelt, jedoch wird sie nicht vernichtet.
Doch was bedeutet nun elastisch und inelastisch?
Elastisch bedeutet hier, dass der Körper nach dem Stoß wieder in seine Ausgangsform zurückkehrt. Die
Energie, die beim Stoß z.b. in die Verformung als potentielle Energie über geht – wie bei der zusammengedrückten Feder – wird nach dem Stoßvorgang komplett wieder in kinetische Energie umgewandelt.
Bei einem inelastischen Stoß bleibt – in diesem Beispiel – der Körper jedoch dauerhaft verformt.
Um sich diese beiden Begriffe einzuprägen, kann man einen Flummiball, einer gleichgroßen Kugel aus
Knete gegenüber stellen. Lässt man beide Kugeln fallen, so springt der Flummi i.d.R. wieder nach oben
(elastisch), während die Knete nach dem Aufprall auf dem Boden einfach liegen bleibt – und meist
nicht mehr in der Form einer Kugel (inelastisch).
Das folgende Bild zeigt noch einmal „comic-haft“ die Begriffe elastisch, inelastisch und teil-elastisch –
oder teil-inelastisch, welcher Philosophie ihr auch immer folgt.
pKörper
Körper 2
elastisch
Körper 1
inelastisch
teil-elastisch
frei nach Bildquelle: Wikipedia 'Elastizität (Physik)'
Benutzer Julian Claus
2
In der Vorlesung wurden bereits einige Stöße berechnet, deshalb kommt hier nun eine allgemeine Anleitung, um solche Probleme anzugehen.
Schritt 1 – Um welche Art Stoß handelt es sich?
Schritt 2 – Wie lauten die Randbedingungen?
Was weiß man über die Situation vor und nach dem Stoß? Dazu gehören
auch insbesondere die Richtungen der Geschwindigkeiten.
Schritt 3 – Aufstellung der Impulserhaltung.
Die Summe der Impulse vor und nach dem Stoß müssen gleich sein
– bei allen Stoßvarianten.
(Schritt 4) – Bei einem elastischen Stoß gilt noch die Erhaltung der kinetischen
Energie.
letzter Schritt – Auflösung der Gleichungen nach den gesuchten Parametern.
Aufgabe 1 Alpha-Zerfall
Beim radioaktiven Zerfall von Uran 238 werden Alphateilchen (Heliumkerne) mit einer Geschwindigkeit
von 1,45 · 107 m/s emittiert. Wie hoch ist die Geschwindigkeit des leichteren Restkerns und in welche
Richtung bewegt er sich?
Wenn Ihnen Informationen fehlen schauen Sie in das Periodensystem der Elemente. Sie können den
Urankern o.B.d.A. vor dem Zerfall als ruhend annehmen.
Aufgabe 2 Ballistisches Pendel
Um die Geschwindigkeit einer Gewehrkugel zu bestimmen, benutzen Sie ein ’Ballistisches Pendel’.
Dieses Pendel besteht aus einem starren Stab der Länge L – welchen wir hier als masselos annehmen –
und einer Pendelmasse M . Die Pendelmasse ist dabei so konzipiert, dass die Gewehrkugel vollständig
in die Masse eintreten kann und in ihr gestoppt wird. Sie schießen also mit dem Gewehr auf die
Pendelmasse und die Messgröße ist anschließend der maximale Auslenkungswinkel des Pendels α.
a) Um welche Art von Stoß handelt es sich hierbei?
b) Leiten Sie die Formel für die Geschwindigkeit der Gewehrkugel in
Abhängigkeit der beiden Massen m und M , der Erdbeschleunigung g
sowie der Länge des Pendels L und des maximalen Auslenkungswinkel
α her.
Vernachlässigen Sie dabei Reibungseffekte wie z.B. Luftwiederstand.
c) Wie schnell war eine m = 0,5 g schwere Gewehrkugel, wenn das Pendel
um maximal 10° ausgelenkt wurde?
Die Länge des Pendels beträgt L = 60 cm und die Pendelmasse
ist M = 520 g schwer.
3
L