me13ndc_03
Werbung

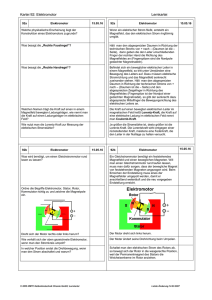
Elektromotoren 1 Stromwender- bzw. Kommutator-Maschine • Gleichstrommotor • Universalmotor (für Gleich- und Wechselstrom) • Repulsionsmotor - permanent erregter Gleichstrommotor - elektrisch erregter (fremderregter) Gleichstrommotor - Reihenschlussmotor - Nebenschlussmotor - Verbundmotor - elektronisch kommutierter Gleichstrommotor Elektromotoren 2 Drehfeld- und Wanderfeld-Maschinen •Drehstrommotor - Drehstrom-Asynchronmaschine - Drehstrom-Synchronmaschine - Kaskadenmaschine •Linearmotor •Wechselstrommotoren: - Kondensatormotor - Spaltpolmotor - Synchronmotor/Einphasenasynchronmotor - Reluktanzmotor - Magnetmotor •Schrittmotor Verbundmaschine Der Doppelschlussmotor (auch Verbund- oder Compound-Motor genannt) vereinigt die Eigenschaften des Neben- und des Reihenschlussmotors in einer Maschine. Er hat eine Reihenschluss- und eine Nebenschlusswicklung. Verbundmaschine Je nach Auslegung hat der Doppelschlussmotor unterschiedliches Betriebsverhalten. Bei richtiger Kompoundierung hat er ein etwas geringeres Anzugsdrehmoment als ein gleichwertiger Reihenschlussmotor. Seine Drehzahl sinkt dann bei Belastung etwas mehr ab als die eines entsprechenden Nebenschlussmotors. Bei Leerlauf geht er nicht durch. Wird der Doppelschlussmotor überkompoundiert, so hat er vorwiegend Reihenschlussverhalten, also ein hohes Anzugsmoment, aber eine instabile Drehzahl. Bei Unterkompoundierung hat er überwiegend Nebenschlussverhalten, also hohe Drehzahlstabilität, aber geringeres Anzugsmoment. Der Doppelschlussmotor wird wegen seines gleichen Drehzahl-DrehmomentVerhaltens zum Antrieb z. B. von Pressen und Stanzen verwendet. Fremderregte Maschinen Hier werden Anker- und Erregerwicklung aus unterschiedlichen Spannungsquellen gespeist. Während bei der Nebenschlussmaschine die Erregerspannung gleich der Ankerspannung ist, kann man bei fremderregten Maschinen durch Verringerung des Erregerstroms (Feldschwächung) die Drehzahl erhöhen oder durch Verringerung der Ankerspannung absenken. Drehmomentschwankungen ergeben geringe Drehzahländerungen. Bürstenlose Gleichstrom-Maschinen Nachteil der Gleichstrommaschinen sind Funken, die bei den Bürsten entstehen („Bürstenfeuer“). Das Bürstenfeuer ist die Hauptursache für hochfrequente Störungen, die der Motor im Betrieb in das Leitungsnetz zurückspeist und die andere elektrische Verbraucher stören. Es begrenzt auch die maximale Drehgeschwindigkeit, da die Bürsten bei hohen Drehzahlen heiß werden und besonders schnell verschleißen. Weiterhin bewirken hohe Drehzahlen auch höhere Induktionsspannungen, die bis hin zum umlaufenden Bürstenfeuer führen können. Bürstenlose Gleichstrom-Maschinen Mit der Entwicklung der Elektronik können kleinere permanenterregte Synchronmotoren so betrieben werden, dass sie von außen ähnlich beschrieben werden können wie eine Gleichstrommaschine. Diese Motoren mit Elektronik-Umrichter wurden besonders im englischen Sprachraum als brushless direct current (BLDC) beworben, auf Deutsch übersetzt bürstenlose Gleichstrommaschine. Die Maschine wird auch als EC-Motor (EC für electronically commutated) bezeichnet. Vom Aufbau her sind diese Motoren ungedämpften permanenterregten Synchronmaschinen gleich und können in Anwendungen, die eine genügende Eigendämpfung haben auch als Synchronmaschine angesteuert werden. Gegenspannung Der Anker dreht sich im Motor innerhalb des Statorfeldes. Nach dem Generatorprinzip wird so in dessen Spulen auch bei Motorbetrieb eine Spannung induziert. Diese induzierte Spannung ist wie die Betriebsspannung gepolt und wirkt daher dem Rotorstrom entgegen. Sie wird Gegenspannung oder Gegen-EMK genannt. Sie ist ein wichtiger Parameter von Motoren, mit ihrer Hilfe lässt sich in etwa die Leerlaufdrehzahl permanenterregter Motoren bestimmen. Die Gegen-EMK ist streng linear abhängig von der Drehzahl des Ankers und der Stärke der Erregung. Die Gegen-EMK kann von Regelschaltungen genutzt werden, um die Drehzahl permanenterregter Motoren exakt zu stabilisieren; dies wird z. B. bei KassettenTonbandgeräten angewendet. Gegenspannung Die Gegen-EMK macht bei Umkehr der Stromrichtung (Klemmenspannung < EMK) aus dem Motor einen Generator, sie kann zur Bremsung und zur Energierückspeisung (Nutzbremsung) dienen. Bei Motorstillstand gibt es keine Gegenspannung. Deshalb haben fremd- und permanenterregte Gleichstrommotoren einen hohen Einschaltstrom – der Widerstand der Rotorspulen ist vergleichsweise klein und somit der Strom im Moment des Einschaltens sehr groß. Ohne Begrenzung des Anlaufstromes werden große Motoren oder das speisende Netz eventuell überlastet, man verwendet daher in Reihe zum Anker Anlasswiderstände, die nach dem Hochlaufen stufenweise kurzgeschlossen werden. Drehfeld- und Wanderfeld-Maschinen Eine Drehstrommaschine wandelt mechanische Energie in Drehstrom oder Drehstrom in mechanische Energie um. Sie kann als elektrischer Generator oder als Elektromotor betrieben werden. Als Drehstrommotor wird ein Elektromotor bezeichnet, der mit Dreiphasenwechselstrom betrieben wird. Drehstrommotoren Drehstrommotoren werden mit Dreiphasenwechselstrom bzw. „Drehstrom“ betrieben. Diese Stromart führt in drei getrennten Leitern jeweils eine eigene periodisch wechselnde Spannung, deren zeitliche Abläufe gegenüber den anderen beiden Leiterspannungen um jeweils 120° vor- bzw. nachlaufend versetzt sind. Drehstrommotoren Speist man drei Elektromagnet-Spulen mit jeweils einer Leiterspannungsphase des Drehstromsystems, dann wird in jeder Spule ein Magnetfeld erzeugt, dessen zeitlicher Ablauf genauso wie der Spannungsverlauf gegenüber den anderen Spulenfeldern um eine Drittelperiode versetzt ist. Ordnet man diese drei Spulen in einem Kreis zueinander an, so ergibt sich aus den einzelnen Spulenmagnetfeldern ein summiertes Magnetfeld, das zwar von gleichbleibender Größe ist, seine Richtung jedoch exakt im Einklang mit der Frequenz bzw. der Periodenwiederholung des Drehstromes fortlaufend ändert. Drehstrommotoren Dieses summierte Magnetfeld „dreht“ sich exakt mit der Geschwindigkeit, die durch die Frequenz vorgegeben ist. Bei 50 Periodenwechseln pro Sekunde des Drehstroms (bzw. 50 Hz) dreht sich das Magnetfeld ebenfalls 50 mal in der Sekunde (oder 3000 mal in der Minute) um sich selbst. Drehstrommotoren Bringt man in dieses rotierende Magnetfeld an einer mittig angeordneten Achse einen magnetischen Gegenstand ein, beispielsweise einen Stabmagneten oder einen einfachen Eisenkörper, so wird dieser „Rotor“ mitgedreht. Drehstrommotoren Drehrichtungsumkehr Zur Änderung der Drehrichtung muss der Drehsinn des Ständerdrehfeldes geändert werden, beim Betrieb am Drehstromnetz genügt hierzu das Vertauschen zweier Außenleiter, z. B. Außenleiter L1 und L3. Eine übliche Schaltungen dazu ist die Wende-Schützschaltung. In der praktischen Anwendung werden die Motorklemmen U2, V2 und W2 gebrückt und • beim rechten Drehfeld: L1 an U1, L2 an V1 und L3 an W1 • beim linken Drehfeld: L1 an W1, L2 an V1 und L3 an U1 Drehstrommotoren Spulenanordnung des Stators Die Wirkung der drei Spulen lässt sich vervielfachen, indem sie jeweils paarig gegenüberliegend und in größerer Zahl über den Umfang des Statorkörpers verteilt werden. Wird jedes Spulenpaar direkt von dem Dreiphasenstrom mit der Netzfrequenz f gespeist, so ergibt sich dabei keine Drehzahlveränderung. Werden jedoch jeweils mehrere Spulenpaare für jede der drei Stromphasen hintereinandergeschaltet und jeweils gleichmäßig über den Statorumfang verteilt, so wird dadurch die Drehzahl n des resultierenden Statormagnetfeldes entsprechend der f Netz beteiligten Spulenpaarzahl p verkleinert. n p für electronically Die Maschine wird auch als EC-Motor (EC commutated) bezeichnet. Vom Aufbau her sind diese Motoren ungedämpften permanenterregten Synchronmaschinen gleich und können in Anwendungen, die eine genügende Eigendämpfung haben auch als Synchronmaschine angesteuert werden Drehstrommotoren Beispiel: Bei einem Motor mit pro Phase vier hintereinandergeschalteten und über den Stator verteilten Spulenpaaren ist bei einer Stromfrequenz von 50 Hz die Umdrehungszahl n in gängigen Maßeinheiten: 50 Hz 3000 1 n 60 750 4 4 min Wechsel- und Drehstrommotoren Bei Wechselstrom kann auch auf einen Kommutator verzichtet werden, wenn die Umdrehungszahl im Rhythmus des Wechselstromes erfolgt; das dann mit umlaufende Magnetfeld des Rotors wird dann: • durch vom Erregerfeld induzierte Ströme in einer Kurzschlusswicklung (Asynchronmotor) • durch Magnetisierung eines Eisenkernes mit Polen (Reluktanzmotor, Schrittmotor) • durch Dauermagnete (Schrittmotor, elektronisch kommutierter Gleichstrommotor, Synchronmotor) • durch einen elektrisch erregten Läufer (siehe Synchronmaschine) erzeugt. Wechsel- und Drehstrommotoren Solche Motoren besitzen daher kein oder ein geringes Anlaufmoment; sie benötigen eine Anlaufhilfe, können jedoch mit Wechselstrom mit mehr als nur einer Phase auch selbst starten: • Drehstrommotoren werden mit Drehstrom betrieben, der aus drei um 120° phasenverschobenen Wechselspannungen besteht und so ein Drehfeld erzeugt. • Kondensator- und Spaltpolmotoren erzeugen sich aus einem einphasigen Wechselstrom selbst eine Hilfsphase (ein Drehfeld) zum Anlauf. • Schritt- und Reluktanzmotoren werden mit frequenzveränderlichem Wechselstrom und/oder mit mehreren Phasen betrieben, damit sie „im Tritt“ bleiben bzw. keine Schrittverluste auftreten. • Synchronmotoren benötigen eine Starthilfe oder schaukeln/schwingen sich von selbst „in Tritt“. Synchronmaschine Da der Läufer immer synchron mit dem Statordrehfeld läuft, nennt man diese Maschinen Drehstrom-Synchronmaschinen. Die Effizienz des Drehfeldmotors wird durch die Ausstattung des Rotors mit eigenen Spulen erhöht, in denen durch den Stromfluss ebenfalls ein magnetisches Feld entsteht, das mit dem Feld der drei festen (Stator-)Spulen zusammenwirkt. Der Rotor, auch Läufer genannt, ist ein Polrad (mind. ein Polpaar) oder ein Vollpolläufer, der eine Erregerwicklung trägt. Wird diese Erregerwicklung von außen über Schleifringe mit Gleichstrom gespeist, erzeugt sie ein Magnetfeld. Bei Maschinen kleiner Leistung (z. B. Fahrraddynamo) kann die Erregerwicklung durch Permanentmagnete ersetzt werden. Asynchronmaschine Bei der Asynchronmaschine bestehen die Spulen im Rotor (Läufer) aus kurzgeschlossenen Leiterschleifen. Für den Asynchronmotor findet daher auch die Bezeichnung Kurzschlussläufermotor Verwendung. Durch das sich ändernde Magnetfeld des Stators wird in den kurzgeschlossenen Leiterschleifen des Rotors ein Stromfluss und ein daraus resultierendes Magnetfeld induziert, das dem verursachenden Magnetfeld entgegen gerichtet ist. Die resultierenden Kräfte üben ein Drehmoment auf den Rotor aus. Lässt man das Statorfeld rotieren, 'schleppt' dieses den Rotor aufgrund oben beschriebener Wirkung mit. Zwangsläufig muss sich der Rotor geringfügig langsamer drehen als das Statordrehfeld (Schlupf), damit das dem Induktionsgesetz zugrunde liegende Prinzip, nämlich die Veränderung des Magnetfeldes pro Zeit, erfüllt bleibt. Bei Gleichlauf von Rotor und Drehfeld findet keine Induktion mehr statt, das übertragbare Drehmoment ist Null. Asynchronmaschine Anders ausgedrückt: Voraussetzung ist, dass der Rotor geringfügig langsamer drehen muss als das Statordrehfeld, damit sich das Magnetfeld innerhalb des mitdrehenden Rotors ständig ändert, was wiederum die Voraussetzung für die Induktion von elektrischer Spannung in den Rotorleitern ist. Eine Ausnahme stellt der Reluktanzmotor dar, dessen Läufer synchrone Drehzahl erreicht. Durch die Anwendung eines Frequenzumrichters, teilweise schon im Gehäuse integriert, kann die Drehzahl fast wie bei Universalmotoren variiert werden