2. Lineare und nichtlineare Analogrechenschaltungen
Werbung

2.
Lineare und nichtlineare Analogrechenschaltungen
Mit Mikrocomputern und Signalprozessoren hat man heute die Möglichkeit, mathematische
Operationen nahezu mit beliebiger Genauigkeit durchzuführen. Die zu verarbeitenden Größen
liegen jedoch häufig als kontinuierliche Signale in Form einer zur Messgröße analogen
elektrischen Spannung vor. In diesem Fall benötigt man zusätzlich zum Digitalrechner einen
Analog-Digital- und einen Digital-Analog-Umsetzer. Dieser Aufwand lohnt sich jedoch nur
dann, wenn die Genauigkeitsforderungen so hoch sind, dass sie sich mit Analogrechenschaltungen nicht erfüllen lassen. Die Grenze liegt größenordnungsmäßig bei 0,1%.
Im Folgenden werden die wichtigsten Analogrechenschaltungen behandelt. Das Prinzip der
Rechenschaltungen soll möglichst deutlich werden. Deshalb wird bei den verwendeten
Operationsverstärkern zunächst immer von idealen Eigenschaften ausgegangen. Die Einschränkungen und Gesichtspunkte bei der Schaltungsdimensionierung, die sich beim Einsatz
realer Operationsverstärker ergeben, wurden im Kapitel 1 behandelt. Die entsprechenden
Überlegungen gelten sinngemäß auch für die folgenden Schaltungen.
2.1
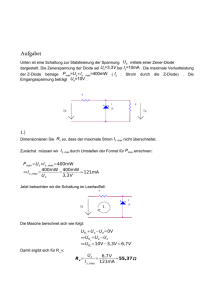
Addierer und Subtrahierer
Rn
R2
RN
R1
Un
U2
U1
Ua
Umkehraddierer
U
U
U1 U 2
+
+ ⋅⋅⋅ + n + a = 0
Rn RN
R1 R 2
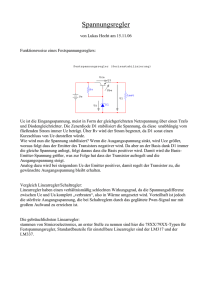
Zur Addition mehrerer Spannungen
kann man einen als Umkehrverstärker beschalteten Operationsverstärker heranziehen. Man schließt
die Eingangsspannungen über Vorwiderstände am N-Eingang an. Da
dieser Punkt hier eine virtuelle
Masse darstellt, liefert die Anwendung der Knotenregel unmittelbar
die angegebene Beziehung für die
Ausgangsspannung:
(2.1)
Man kann den Umkehraddierer auch als Verstärker mit großem Nullpunkt-Einstellungsbereich einsetzen, indem man zur Signalspannung in der beschriebenen Weise eine
Gleichspannung addiert. Für die Ausgangsspannung Ua des Umkehraddierers gilt:
R
R
R
(2.2)
U a = - N ⋅ U1 + N ⋅ U 2 + ⋅ ⋅ ⋅ + N ⋅ U n
R2
Rn
R1
Zur Reduzierung des Eingangsruhestromes kann der P-Eingang über einen Widerstand, der der
Parallelschaltung aller Widerstände des N-Einganges entspricht, an Masse gelegt werden (siehe
Kap. 1.4, Gl. 1.31).
Die Subtraktion lässt sich auf eine Addition zurückführen, indem man das zu subtrahierende
Signal invertiert. Hierzu benötigt man zwei Operationsverstärker, die jeweils wie Umkehraddierer
beschaltet sind. Das Ausgangssignal des ersten OPVs stellt eine Eingangsspannung des zweiten
OPVs dar.
Grundsätzlich kann ein Subtrahierer auch mit nur einem Operationsverstärker aufgebaut werden.
An die Widerstände werden hier im Allgemeinen hohe Genauigkeiten gestellt. Zur Berechnung
der Ausgangsspannung des Subtrahierers mit einem Operationsverstärker kann der Überlagerungssatz herangezogen werden. Danach gilt:
G. Schenke, 6.2008
Industrieelektronik
FB Technik, Abt. E+I
19
U a = k 1 ⋅ U1 + k 2 ⋅ U 2
(2.3)
Für U2 = 0 arbeitet die Schaltung als Umkehrverstärker mit Ua = -αN·U1. Daraus folgt für
k1 = -αN. Für U1 = 0 arbeitet die Schaltung als Elektrometerverstärker mit vorgeschaltetem
Spannungsteiler. Für das Potential am Pluseingang gilt:
RP
VP =
⋅ U2
(2.4)
R P + R P αP
Dieses Potential wird demnach mit dem
Faktor (1 + αN) verstärkt. Es wird also in
RN/αN
RN
diesem Fall:
VN
αP
Ua =
⋅ (1 + α N ) ⋅ U 2
(2.5)
1
+
α
RP/αP
P
VP
Wenn die beiden Widerstandsverhältnisse
Ua gleich sind, d.h. αN = αP = α. Daraus folgt:
U1 U2
RP
Ua = α ⋅ U2
(2.6)
Damit ist k2 = α und k1 = - α. Daraus
ergibt sich die Ausgangsspannung im
Allgemeinen Fall zu:
Subtrahierer mit einem OPV
U a = α ⋅ (U 2 - U1 )
(2.7)
Koeffizientenbedingung :
αN = αP = α.
Beim Mehrfach-Subtrahierer kann die Knotenregel auf den N-Eingang angewendet werden:
m
U -V
U -V
(2.8)
∑ R iN / α N + aR N = 0
iN
N
i =1 N
Aus Gl. 2.8 folgt:
m
α
⋅
⋅
U
V
∑ iN iN N ∑ α iN + 1 + U a = 0
i =1
i = 1
m
(2.9)
RN/αmN
RN/α2N
RN
RN/α1N
VN
RP/α1P
VP
RP/α2P
Ua
RP/αnP
UmN U2N U1N U1P
U2P
UnP
RP
Mehrfach-Subtrahierer mit einem OPV
G. Schenke, 6.2008
Industrieelektronik
FB Technik, Abt. E+I
20
Analog erhält man für den P-Eingang:
n
n
α
⋅
⋅
U
V
∑ iP iP P ∑ α iP + 1 = 0
i =1
i = 1
Es ist VN = VP und es gilt die zusätzliche Koeffizientenbedingung:
m
∑ α iN =
i =1
(2.10)
n
∑ α iP
(2.11)
i =1
Durch Subtraktion der Gl. 2.9 und 2.10 und Auflösung nach Ua erhält man für den MehrfachSubtrahierer die Ausgangsspannung:
Ua =
n
m
i =1
i =1
∑ α iP ⋅ U iP - ∑ α iN ⋅ U iN
(2.12)
Vorrausetzung für die richtige Funktionsweise ist, dass die angegebene Koeffizientenbedingung nach Gl. 2.11 erfüllt wird. Ist dies nach Vorgabe der Koeffizienten noch nicht der
Fall, kann man mit dem noch fehlenden Koeffizienten die Spannung 0 addieren bzw.
subtrahieren.
Für n = m = 1 geht der Mehrfach-Subtrahierer in die Grundschaltung des Subtrahierers mit
einem Operationsverstärker über.
Die Eingänge der Rechenschaltungen belasten die Signalspannungsquellen. Wenn dadurch
keine Rechenfehler entstehen sollen, müssen deren Ausgangswiderstände hinreichend
niederohmig sein. Sind die Quellen ihrerseits gegengekoppelte Operationsverstärkerschaltungen, ist diese Bedingung im Allgemeinen gut erfüllt. Bei anderen Signalquellen ist es
meist notwendig, Impedanzwandler in Form von Elektrometerverstärkern vor die Eingänge zu
schalten.
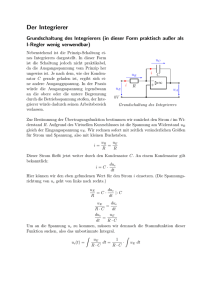
2.2 Integratoren
In der Analogrechentechnik ist der Integrator besonders wichtig. Er bildet allgemein einen
Ausdruck der Form:
t
~ ~
u a (t ) = K ⋅ ∫ u e ( t ) ⋅ d t + U a (t = 0)
(2.13)
0
IC
R
C
Ie
Ua
Ue
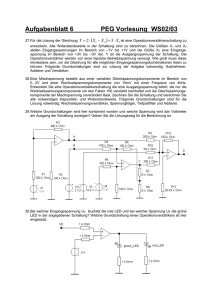
Der Umkehrintegrator unterscheidet sich vom
Umkehrverstärker dadurch, dass der Gegenkopplungswiderstand RN durch einen Kondensator C ersetzt wird. Dann ergibt sich die
Ausgangsspannung:
t
1
~ ~
(2.14)
u a (t ) = ⋅ ∫ i C ( t ) ⋅ d t + Q 0
C 0
Umkehrintegrator
Q0 ist die Ladung, die sich zu Beginn der Integration (t = 0) auf dem Kondensator befindet.
Mit IC = -Ue/R folgt:
u a (t ) = -
t
1
~ ~
⋅ u e ( t ) ⋅ d t + U a0
R ⋅ C ∫0
(2.15)
Die Konstante Ua0 stellt die Anfangsbedingung dar: Ua0 = Ua (t = 0) = Q0/C. Sie muss durch
zusätzliche Maßnahmen auf einen definierten Wert gesetzt werden.
G. Schenke, 6.2008
Industrieelektronik
FB Technik, Abt. E+I
21
Wenn im Sonderfall die Eingangsspannung Ue zeitlich konstant ist, erhält man für die
Ausgangsspannung:
U
u a (t ) = - e ⋅ t + U a0
(2.16)
R ⋅C
Die Ausgangsspannung steigt also linear mit der Zeit an. Deshalb ist die Schaltung zur
Erzeugung von Dreieck- und Sägezahnspannungen sehr gut geeignet.
Einen weiteren Sonderfall erhält man, wenn die Eingangsspannung eine kosinusförmige
Wechselspannung ue = ûe· cos(ωt) ist. Für die Ausgangsspannung erhält man mit τ = R · C:
u a (t ) = -
t
û
1
~ ~
⋅ ∫ û e ⋅ cos(ω t ) ⋅ d t + U a0 = - e ⋅ sin(ωt ) + U a0
R ⋅C 0
ω⋅ τ
(2.17)
Die Amplitude der Ausgangswechselspannung ist also umgekehrt proportional zur Kreisfrequenz ω. Trägt man den Amplitudengang doppeltlogarithmisch auf, ergibt sich eine Gerade
mit der Steigung -6 dB/Oktave bzw. –20 dB/Dekade. Diese Eigenschaft ist ein einfaches
Kriterium dafür, ob sich eine Schaltung als Integrator verhält.
Beim realen Operationsverstärker können Eingangsruhestrom IB und Offsetspannung U0 sehr
störend sein, weil sich ihre Wirkung zeitlich summiert.
Die störende Wirkung der Eingangsströme lässt
C
sich dadurch reduzieren, dass man den P-Eingang
nicht direkt an Masse legt, sondern über einen
R
Widerstand, der ebenfalls den Wert R besitzt. An
den beiden Widerständen fällt die Spannung IB · R
ab. Der Fehlerstrom durch den Kondensator C
Ue
Ua wird Null. Die verbleibende Fehlerquelle ist ledigR
C1
lich der viel kleinere Offsetstrom. Der Kondensator
C1 schließt Rauschspannungen am P-Eingang kurz.
Umkehrintegrator mit Eingangsruhestromkompensation
Eine weitere Fehlerquelle können Leckströme durch Kondensatoren darstellen. Da Elektrolytkondensatoren Leckströme im µA-Bereich besitzen, sollten als Integrationskondensatoren nur
Folienkondensatoren verwendet werden.
Ein Integrator ist bei manchen Anwendungen erst dann brauchbar, wenn man die
Ausgangsspannung Ua(t = 0) unabhängig von der Eingangsspannung vorgeben kann. Die
Integrationsschaltung muss durch elektronische Schalter ermöglichen, die Integration zu
stoppen und Anfangsbedingungen zu setzen. Ein Integrator mit den Betriebsarten
„Integrieren, Halten und Anfangsbedingung setzen“ erfüllt diese Anforderungen.
R2
RN
S2
R1
U2
C
S1
U1
Ua
Integrator mit drei Betriebsarten
G. Schenke, 6.2008
Industrieelektronik
Ist der Schalter S1 geschlossen und
S2 offen, arbeitet die Schaltung als
Integrator, die Spannung U1 wird
integriert. Öffnet man nun den
Schalter S1, wird der Ladestrom
beim idealen Integrator gleich Null,
und die Ausgangsspannung bleibt
auf dem Wert stehen, den sie im
Umschaltaugenblick hatte. Dies ist
von Nutzen, wenn man eine Rechnung unterbrechen möchte, um die
FB Technik, Abt. E+I
22
Ausgangsspannung in Ruhe abzulesen. Zum Setzen der Anfangsbedingungen lässt man S1
geöffnet und schließt S2. Dadurch wird der Integrator zum Umkehrverstärker mit der
Ausgangsspannung:
R
U a (t = 0 ) = - N ⋅ U 2
(2.18)
R2
Dieser Wert (Anfangsbedingung) stellt sich jedoch erst mit einer gewissen Verzögerung ein,
die durch die Zeitkonstante RN · C bestimmt wird.
Als elektronische Schalter können z.B. die Analogschalter TL601 oder TL604 oder der Analogschalter TL607 verwendet werden. Elektronisch gesteuerte Integratoren sind als integrierte
Schaltung verfügbar. Der ACF2101 von Burr Brown enthält zwei derartige Integratoren. Die
Datenblätter der ICs können, wie die Hilfsblätter zur Vorlesung, unter Datenblätter in den PDFDateien „TL601-610.pdf“ bzw. „ACF2101.pdf“ eingesehen werden.
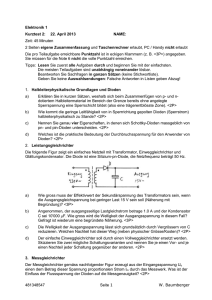
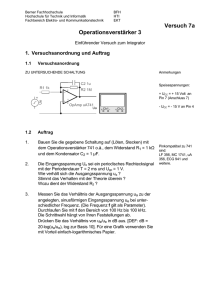
2.3 Differentiatoren
Vertauscht man beim Umkehrintegrator Widerstand und Kondensator, erhält man den
Differentiator. Die Anwendung der Knotenregel auf den Summationspunkt (N-Eingang)
liefert die Beziehung:
du ( t ) u ( t )
du ( t )
du ( t )
C⋅ e + a
= 0 ⇒ ua = - R ⋅ C ⋅ e
= -τ⋅ e
(2.19)
dt
R
dt
dt
Für sinusförmige Wechselspannungen ue = ûe · sin(ωt) erhält man die Ausgangsspannung:
(2.20)
u a (t) = - ω ⋅ R ⋅ C ⋅ û e ⋅ cos(ωt)
Für das Verhältnis der Amplituden folgt daraus:
û a
U
= a = A = A = ω⋅ R ⋅C
û e
Ue
R
C
Ue
Ua
(2.21)
Trägt man den Amplitudengang der Verstärkung
doppeltlogarithmisch auf, erhält man eine Gerade mit
der Steigung +6 dB/Oktave bzw. +20 dB/Dekade.
Allgemein bezeichnet man eine Schaltung in dem
Frequenzbereich als Differentiator, in dem ihre
Amplitudengangkurve mit 6 dB/Oktave steigt.
Das Verhalten im Frequenzbereich lässt sich auch
direkt mit Hilfe der komplexen Rechnung ermitteln.
Differentiator
Der komplexe Frequenzgang F(ω) oder A(ω) beträgt:
U
F(ω) = A(ω) = a = − jω ⋅ R ⋅ C
(2.22)
Ue
Die praktische Realisierung der Differentiatorschaltung bereitet gewisse Schwierigkeiten, da
eine große Schwingneigung besteht. Die Ursache liegt darin begründet, dass das Gegenkopplungsnetzwerk bei höheren Frequenzen eine Phasennacheilung von 90° verursacht. Für
den komplexen Rückkoppelungsfaktor k gilt:
1
k (ω) =
(2.23)
1 + jω ⋅ R ⋅ C
Sie addiert sich zur Phasennacheilung des Operationsverstärkers, die im günstigsten Fall
selbst schon 90° beträgt. Die verbleibende Phasenreserve ist Null, die Schaltung also instabil.
Abhilfe lässt sich dadurch schaffen, dass man die Phasenverschiebung des Gegenkopplungsnetzwerkes bei hohen Frequenzen reduziert, indem man zum Kondensator C einen WiderG. Schenke, 6.2008
Industrieelektronik
FB Technik, Abt. E+I
23
stand R in Reihe schaltet. Dadurch muss sich der nutzbare Frequenzbereich nicht notwendigerweise reduzieren, da der Differentiator bei höheren Frequenzen wegen abnehmender
Schleifenverstärkung ohnehin nicht mehr richtig arbeitet.
Als Grenzfrequenz f1 für das RC-Glied R1 · C
R
wählt man zweckmäßigerweise den Wert, bei
C
R1
dem die Schleifenverstärkung g = 1 wird. Dabei
geht man zunächst von einem universell
korrigierten Verstärker aus. Die Phasenreserve
Ue
Ua bei der Frequenz f beträgt ca. 45°.
1
Praktische Ausführung eines Differentiators
Die Grenzfrequenz f1 kann aus der Transitfrequenz fT und der Zeitkonstanten τ = R · C berechnet
werden. Für f1 gilt:
fT
1
=
2π ⋅ R ⋅ C
2π ⋅ R 1 ⋅ C
f1 =
(2.24)
Experimentell kann die Dämpfung mit einer Dreieckspannung am Eingang des praktischen
Differentiators überprüft werden. Eine rechteckförmige Ausgangsspannung ohne nennenswerte
Überschwinger zeigt, dass der Differentiator optimal gedämpft ist.
2.4 Multiplizierer, Dividierer und Radizierer
Die Multiplikation und Division lässt sich auf eine Addition und Subtraktion von
Logarithmen zurückführen:
x⋅y
= e (lnx + lny - lnz)
(2.25)
z
Diese Funktion kann man mit drei Logarithmierern, einem e-Funktionsgenerator und einer
Addier-Subtrahier-Schaltung bilden.
IC
T
R1
R1
Ue
T
Ua
IC
Ue
Ua
Grundschaltung des Logarithmierers
Grundschaltung des e-Funktionsgenerators
Wenn der Kollektorstrom IC deutlich den Sättigungssperrstrom ICS übersteigt (IC >>ICS) gilt:
I C = I CS ⋅ e U BE U T
⇒ U BE = U T ⋅ ln (I C I CS )
(2.26)
Die Ausgangsspannung des Transistor-Logarithmierers ergibt sich daraus:
Ue
U a = - U BE = - U T ⋅ ln
für U e > 0
(2.27)
I CS ⋅ R 1
Für den e-Funktionsgenerator stellt sich entsprechend folgende Ausgangsspannung ein:
U a = - I CS ⋅ R 1 ⋅ e -Ue UT
für U e < 0
(2.28)
G. Schenke, 6.2008
Industrieelektronik
FB Technik, Abt. E+I
24
Die Addier-Subtrahier-Schaltung lässt sich einsparen, wenn man die Eingänge des Differenzverstärkers bei dem e-Funktionsgenerator zur Subtrahierung verwendet und berücksichtigt, dass
der Referenzspannungsanschluss als zusätzlicher Signaleingang verwendet werden kann.
Die Logarithmierer bilden die Ausdrücke:
Uy
Uz
(2.29)
V1 = - U T ⋅ ln
V2 = - U T ⋅ ln
I CS ⋅ R 1
I CS ⋅ R 1
Der e-Funktionsgenerator liefert dann die Ausgangsspannung:
Ux ⋅ Uy
U a = U x ⋅ e - (( V1 - V2 ) UT ) =
(2.30)
Uz
Sofern alle Transistoren die gleichen Daten und die gleiche Temperatur aufweisen, kürzen sich
die Sättigungssperrströme ICS und die Spannung UT. Monolithisch integrierte Schaltungen sind
besonders für Multiplizierer geeignet. Bei diesem Verfahren ist von Nachteil, dass alle Eingangsspannungen größer Null sein müssen. Ein solcher Multiplizierer wird als EinquadrantenMultiplizierer bezeichnet.
R1
T3
R1
OPV3
T4
RE
Ux
Ua
OPV4
T1
R1
V1
RE
V2
T2
RE
R1
Uy
Uz
OPV1
OPV2
Multiplikation über Logarithmen
Multiplizierer lassen sich mit analogen Multifunktions-Konvertern wie der AD538 realisieren. Sie
sind jedoch auch als komplette integrierte Schaltung erhältlich wie der RC4200 mit Stromeingängen. Die Datenblätter der ICs können, wie die Hilfsblätter zur Vorlesung, unter Datenblätter in den PDF-Dateien „AD538.pdf“ bzw. „RC4200.pdf“ eingesehen werden.
Die meisten modernen Multiplizierer sind Steilheits-Multiplizierer. Sie nutzen die Steilheit S
eines bipolaren Transistors aus, die proportional zum Kollektorstrom ist. Die Steilheit S
beschreibt die Änderung des Kollektorstroms IC mit der Basis-Emitter-Spannung UBE im Arbeitspunkt.
dI C
I
S =
= C
(2.31)
dU BE
UT
Die Änderung des Kollektorstroms ist demnach proportional zum Produkt aus Eingangsspannungsänderung und Kollektorruhestrom. Diese Eigenschaft wird beim Differenzverstärker
zur Multiplikation ausgenutzt. Der Operationsverstärker bildet die Differenz der Kollektorströme:
Ux
e U x UT - 1
U a = R z ⋅ (I C2 - I C1 ) = - R z ⋅ U x U T
⋅ I E = - R z ⋅ I E ⋅ tanh
(2.32)
2 ⋅ UT
e
+1
G. Schenke, 6.2008
Industrieelektronik
FB Technik, Abt. E+I
25
Die Reihenentwicklung für den tanh(x) liefert für x<<1 Î tanh(x) ≈ x. Damit gilt für |Ux| << UT
und |Uy| >> UBE.
Uy
Ux
R Ux ⋅ Uy
IE ≈ und U a ≈ - R z ⋅ I E ⋅
⇒ Ua ≈ z ⋅
(2.33)
Ry
2 ⋅ UT
R y 2 ⋅ UT
Um den Fehler in Gl. 2.33 kleiner
als 1% zu halten, muss der Betrag
von |Ux| < 0,35 · UT ≈ 9 mV sein.
R1
R1
Wegen der geringen Spannung Ux
müssen die Transistoren T1 und T2
enge Paarungstoleranzen besitzen,
Ua damit die Offsetspannungsdrift nicht
IC1
IC2
stört.
Für das richtige Funktionieren der
Rz
T1
T2
Schaltung muss vorausgesetzt werUx
den, dass Uy immer negativ ist,
IE
während die Spannung Ux beide
Ry
Vorzeichen annehmen darf. Ein
solcher Multiplizierer wird als
Uy
Prinzip eines
Zweiquadranten-Multiplizierer beSteilheitsmultiplizierers
zeichnet.
Steilheitsmultiplizierer lassen sich in verschiedener Hinsicht optimieren. Wünschenswert sind
kleine Linearitätsfehler, eine größere Spannung Ux und die Erweiterung für VierquadrantenBetrieb. Vierquadranten-Multiplizierer werden vorwiegend als integrierte Steilheitsmultiplizierer
mit verschiedenen Genauigkeiten und Bandbreiten realisiert.
Integrierte VierquadrantenMultiplizierer bestehen aus
X1
einer Referenzquelle für die
V=1
X2
Recheneinheit E (z.B. 10 V,
(X1 - X2) · (Y1 - Y2)
auch scale factor SF), dem
E
OUT
Y1
eigentlichen Multiplizierer,
V=1
drei Differenzverstärker mit
Y2
V = 1 und einem OPV hoher
Verstärkung. Die VerstärZ1
kung für die Z-Eingänge ist
V=1
manchmal einstellbar. NullZ2
abgleich ist über die NEingänge möglich.
Blockschaltbild eines integrierten Vierquadranten-Multiplizierers
Ein analoger Multiplizierer soll das Produkt der Eingangsgrößen dividiert durch die Recheneinheit E = 10 V bilden.
Ux ⋅ Uy
Ua =
(2.34)
E
In der Praxis ist jeder Spannung eine kleine Offsetspannung überlagert. Es ist also im
allgemeinen Fall:
(U x - U x0 ) ⋅ U y - U y0
U a + U a0 =
(2.35)
E
V+
V+
Rz
(
G. Schenke, 6.2008
)
Industrieelektronik
FB Technik, Abt. E+I
26
Daraus folgt:
U x ⋅ U y U y ⋅ U x0 + U x ⋅ U y0 + U x0 ⋅ U y0
+
- U a0
(2.36)
Ua =
E
E
Das Produkt Ux · Uy muss gleich Null sein, wenn Ux oder Uy gleich Null ist. Das ist nur
möglich, wenn Ux0, Uy0 und Ua0 einzeln verschwinden. Man benötigt also grundsätzlich drei
Nullpunkteinsteller zur Kompensation der Offsetspannung. Beim Abgleich geht man zweckmäßigerweise folgendermaßen vor: Man macht zunächst Ux = 0. Dann wird nach Gl. 2.36:
U y ⋅ U x0 + U x0 ⋅ U y0
- U a0
(2.37)
Ua =
E
Nun variiert man die Spannung Uy. Wegen des Ausdrucks Uy · Ux0 ändert sich dabei auch die
Ausgangsspannung. Nun stellt man den Nullpunkteinsteller von Ux so ein, dass sich trotz
Variation von Uy eine konstante Ausgangsspannung ergibt. Dann ist Ux0 = 0.
Im zweiten Schritt macht man Uy gleich Null und variiert Ux. Damit lässt sich auf dieselbe
Weise der Nullpunkt von Uy abgleichen. Im dritten Schritt macht man Ux = Uy = 0 und gleicht
die Ausgangsoffsetspannung Ua0 auf Null ab.
X1
Ux
X2
Y2
Ua
(X1 - X2) · (Y1 - Y2)
E
Y1
Uy
OUT
V=1
V=1
Z1
V=1
Z2
Grundschaltung eines integrierten Vierquadranten-Multiplizierers als Multiplizierer
Die Ausgangsspannung eines Multiplizierers ist das Produkt der potentialfreien Eingangsspannungen Ux und Uy dividiert durch die Recheneinheit E = 10 V. Der Offsetspannungsabgleich ist nur möglich, wenn die Spannungen Ux und Uy sich auf das Massepotential
beziehen. Über die N-Eingänge der drei Differenzverstärker mit V = 1 werden die
Spannungen Ux0, Uy0 und Uz0 auf Null eingestellt. Für die Ausgangsspannung Ua gilt:
Ux ⋅ Uy
(2.38)
Ua =
E
Mit integrierten Vierquadranten-Multiplizierern kann auch der Dividierer realisiert werden.
Hierzu wird der Ausgang des Vierquadranten-Multiplizierers mit X2 oder Y2 verbunden.
X1
X2
Y2
Ua
(X1 - X2) · (Y1 - Y2)
E
Y1
Uy
OUT
V=1
V=1
Z1
V=1
Z2
Uz
Grundschaltung eines integrierten Vierquadranten-Multiplizierers als Dividierer
Die Ausgangsspannung eines Dividierers ist das Produkt der potentialfreien Eingangsspannung Uz und der Recheneinheit E = 10 V dividiert durch die potentialfreie EingangsG. Schenke, 6.2008
Industrieelektronik
FB Technik, Abt. E+I
27
spannung Uy. Der Offsetspannungsabgleich ist nur möglich, wenn die Spannungen Uz und Uy
sich auf das Massepotential beziehen. Für die Ausgangsspannung Ua des Dividierers gilt:
U ⋅E
Ua = z
(2.39)
Uy
Mit integrierten Vierquadranten-Multiplizierern kann auch der Radizierer realisiert werden.
Hierzu wird der Ausgang des Vierquadranten-Multiplizierers über eine Diode mit X1 und Y2
verbunden. Die Eingänge X2 und Y1 werden an Masse gelegt bzw. für den Offsetspannungsabgleich genutzt. Ein Lastwiderstand RL muss angeschlossen sein.
X1
X2
V=1
(X1 - X2) · (Y1 - Y2)
E
Y1
Y2
Ua
OUT RL
V=1
Z1
V=1
Z2
Uz
Grundschaltung eines integrierten Vierquadranten-Multiplizierers als Radizierer
Die Ausgangsspannung eines Radizierers ist die Quadratwurzel aus dem Produkt der
potentialfreien Eingangsspannung Uz und der Recheneinheit E = 10 V. Für die Ausgangsspannung Ua des Dividierers gilt:
Ua = Uz ⋅ E
(2.40)
Integrierte Vierquadranten-Multiplizierer sind für unterschiedliche Genauigkeiten und verschiedene Bandbreiten erhältlich. Der Präzisions-Multiplizierer AD534 kann in Anwendungen mit
geringen Bandbreiten verwendet werden. Der AD834 ist mit einer Bandbreite von 500 MHz für
Hochfrequenzanwendungen ausgelegt. Die Datenblätter der ICs können, wie die Hilfsblätter zur
Vorlesung, unter Datenblätter in den PDF-Dateien „AD534.pdf“, „AD632.pdf“, „AD734.pdf“,
„AD834.pdf“ und „AD835.pdf“, eingesehen werden.
2.5 Gleichrichter und Maximalwert
Mit der OPV-Schaltung „Ideale Diode“ kann je nach Polarität der Dioden der positive oder
negative Ausgangswert unterdrückt werden (Ua = 0). Eine niederohmige Belastung des Ausgangs muss vermieden werden. In der vorliegenden Schaltung arbeitet der OPV bei positiven
Eingangsspannungen als Umkehrverstärker. In diesem Fall ist der Ausgang des OPV negativ,
d.h. die Diode D1 leitet und Diode D2 sperrt.
RN
Die Ausgangsspannung Ua = -RN/R1 · Ue. Bei
negativer Eingangsspannung wird der Ausgang
R1
D1
des OPV positiv. D1 sperrt in diesem Fall; D2
Ua wird leitend und koppelt den OPV gegen. Sie
verhindert, dass der OPV übersteuert wird. Der
Ue
D2
Summationspunkt bleibt auf Nullpotential. Da
D1 sperrt, wird die Ausgangsspannung Ua = 0.
OPV-Schaltung „Ideale Diode“
Für die Ausgangsspannung der idealen Diode gilt zusammenfassend:
für U e ≥ 0
- R N R 1 ⋅ U e
Ua =
0
für U e ≤ 0
G. Schenke, 6.2008
Industrieelektronik
(2.40)
FB Technik, Abt. E+I
28
Wird bei der OPV-Schaltung „Ideale Diode“ RN = R1 gewählt, so bildet diese Schaltung einen
invertierenden Einweggleichrichter. Diese Schaltung kann mit einem zweiten OPV, der die
Eingangsspannung und das 2fache der Ausgangsspannung der „Idealen Diode“ addiert, zum Vollweggleichrichter erweitert werden.
C
2 R2
R1
R1
2 R2
R2
V1
D1
Ua
Ue
D2
Vollweggleichrichter
Für die Ausgangsspannung Ua des Vollweggleichrichters gilt:
für U e ≥ 0
Ue
Ua =
für U e ≤ 0
- U e
(2.41)
Mit Hilfe des Kondensators C lässt sich der zweite OPV zum Tiefpass 1. Ordnung erweitern.
Wenn man seine Grenzfrequenz klein gegenüber der niedrigsten Signalfrequenz wählt, erhält man
am Ausgang eine reine Gleichspannung.
Mehrere „Ideale Dioden“ kann man als Maximalwertbildner einsetzen. Der nachgeschaltete
Spannungsfolger, der einen Impedanzwandler darstellt, belastet die Ausgänge der „Idealen
Dioden“ nicht.
Diese Schaltung verarbeitet nur
R1
positive Eingangsgrößen, da
negative Werte mit Null abgeR1
D1
bildet werden. Werden Anode
und Kathode aller Dioden
Ue1
getauscht, dann kann der MiniD2
malwert von mehreren Eingangsgrößen mit dieser SchalR1
V1
tung gebildet werden.
R1
Ua Mindestens eine der EingangsD1
größen muss bei der dargeUe2
stellten Schaltung zu jedem
D2
Zeitaugenblick positiv sein. Die
Ausgangsspannung des MaxiR1
malwertbildners ergibt sich
dann zu:
R1
D1
U a = - Max {U e1 , U e2 , U e3 }
(2.42)
Ue3
D2
Maximalwert von mehreren Eingangsgrößen
G. Schenke, 6.2008
Industrieelektronik
FB Technik, Abt. E+I
29
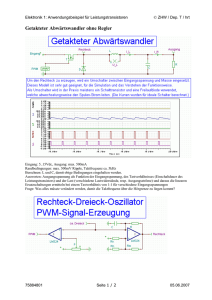
2.6 Tote Zone und Begrenzer
Der Unempfindlichkeitsbereich, die sogenannte „Tote Zone“, tritt bei mechanischen und elektromagnetischen Wandlern und Messinstrumenten auf. Diese Nichtlinearität bezeichnet man mit
Unempfindlichkeitsbereich, weil in dem Bereich –UT1 ≤ Ue ≤ UT2 die Eingangsspannung Ue
keinen Einfluss auf die Ausgangsspannung Ua hat.
Für die Ausgangsspannung gilt:
Ua
Ue
UT1
UT2
U e ≤ U T1
− (U e − U T1 )
Ua =
0 für U T1 ≤ U e ≤ U T2
− (U − U )
U e ≥ U T2
e
T2
(2.42)
Tote Zone oder Unempfindlichkeitsbereich
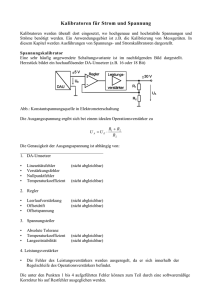
Realisiert wird der Unempfindlichkeitsbereich mit einem invertierenden Verstärker. Zum
Eingangswiderstand werden zwei Zenerdioden in Reihe geschaltet. Der Unempfindlichkeitsbereich beginnt bei UT1. Der Betrag
R1
dieser Spannung wird durch die ZenerD1
D2
spannung UZ1 von D1 und der DurchR1
lassspannung UF2 von D2 gebildet. Der
Unempfindlichkeitsbereich endet bei
U
Ue
a UT2. Der Betrag dieser Spannung wird
durch die Zenerspannung UZ2 von D2
und der Durchlassspannung UF1 von D1
gebildet.
Grundschaltung der „Toten Zone“ für einfache Anwendungen
Die Grundschaltung der „Toten Zone“ weist immer Abweichungen vom theoretischen Verlauf
auf. Diese werden besonders durch den Knickbereich der Zenerdioden hervorgerufen. Außerdem
kann der Unempfindlichkeitsbereich nur in gewissen Stufen durch die Werte der Zenerdioden
vorgegeben werden.
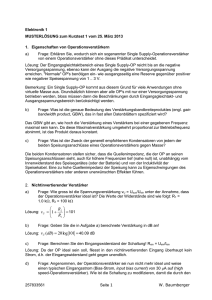
Mit der Präzisionsschaltung einer „Toten Zone“, die auf zwei „Idealen Dioden“ basiert, kann der
Unempfindlichkeitsbereich exakt nachgebildet werden. Die Widerstände R3 und R4 sollen jeweils
mit hoher Genauigkeit (1‰) ausgewählt
werden. Die Werte
für UT1 = -R3/R1 · V+
und UT2 = -R3/R2 · Vkönnen genau vorgegeben werden. Gegenüber der Grundschaltung ist das Ausgangssignal invertiert.
Präzisionsschaltung
für die „Tote Zone“
G. Schenke, 6.2008
Industrieelektronik
FB Technik, Abt. E+I
30
Eine häufig vorkommende Nichtlinearität ist der Begrenzer. Über einen gewissen Bereich stehen
die Eingangsspannung Ue und die Ausgangsspannung Ua in einem linearen Zusammenhang. Wird
der vorher festgelegte Wertebereich überschritten, haben wir theoretisch eine plötzliche
Steigungsänderung (Knick). Eine weitere Änderung von Ue über die Grenzwerte UBegr.1 und
UBegr.2 bewirkt keine weitere Änderung von Ua.
Für die Ausgangsspannung gilt:
UBegr.1
Ua
Ue
UBegr.2
U Begr.1
- U e ≥ U Begr.1
U a = - U e für U Begr.1 ≥ - U e ≥ U Begr.2 (2.43)
- U e ≤ U Begr.2
U Begr.2
Begrenzerkennlinie
Realisiert wird die Begrenzerschaltung mit einem invertierenden Verstärker. Vom Ausgang des
Verstärkers werden zwei Zenerdioden (D1, D2) über die Widerstände R1 bzw. R2 gegen die
positive bzw. negative Versorgungsspannung geschaltet. Die Dioden D3, die den Verstärker
zusätzlich gegenkoppeln, sind über die Zenerdioden vorgespannt. Die Begrenzerschaltung arbeitet
im unteren Aussteuerungsbereich wie
D3
R2
V+ ein invertierender Verstärker. Die Ausgangsspannung wird auf UBegr.1 bzw.
R3
UBegr.2 begrenzt. Der Betrag der
D
2
Spannung UBegr.1 wird durch die ZenerR3
spannung UZ1 von D1 und der Durchlassspannung UF3 von D3 gebildet. Die
U
Spannung
UBegr.2 wird durch die ZenerUe
a
D1
D3
spannung UZ2 von D2 und der DurchR1
Vlassspannung UF3 von D3 gebildet.
Grundschaltung des Ausgangsspannungsbegrenzers
Die Grundschaltung der Begrenzerschaltung weist Abweichungen vom theoretischen Verlauf auf.
Durch die Dimensionierung von R1 und R2 muss der Knickbereich der Zenerdioden vor dem
Ansprechen der Dioden sicher verlassen sein, da sonst starke Abrundungen im Knickpunkt
auftreten. Außerdem ist zu berücksichtigen, dass die Begrenzerspannungen nur in gewissen
Stufen durch die Werte der Zenerdioden vorgegeben werden können.
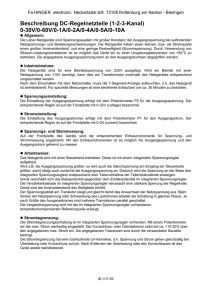
Mit der Präzisionsschaltung für den Ausgangsspannungsbegrenzer kann die Spannungsbegrenzung exakt eingestellt werden. Wie die „Tote Zone“ basiert sie auf zwei „Idealen Dioden“.
Die Widerstände R3 und R4 sollen jeweils mit hoher Genauigkeit (1‰) ausgewählt werden. Die
Werte für UBegr,1 = R3/R1 · V+ und UBegr.2 = R3/R2 · V- können genau vorgegeben werden.
Bei allen Schaltungen mit nichtlinearem Verhalten ist zu beachten, dass die Grenzfrequenz des
OPV schon bei niedrigen Frequenzen der Eingangsgröße erreicht wird. Mit dem LM324 können
sinusförmige Eingangsspannungen bis rd. 1 kHz sowohl bei der „Toten Zone“ als auch beim
Begrenzer mit guter Genauigkeit verarbeitet werden. Mit dem TL074 werden brauchbare Werte
noch bei 10 kHz erzielt.
G. Schenke, 6.2008
Industrieelektronik
FB Technik, Abt. E+I
31
Präzisionsschaltung für den Ausgangsspannungsbegrenzer
Die beiden Präzisionsschaltungen für die „Tote Zone“ und für den Ausgangsspannungsbegrenzer
unterscheiden sich nur um den Widerstand R4 zwischen dem Eingang der Schaltung und dem NEingang des Addierers. Die Widerstände R1 und R2 können für einstellbare Werte durch eine
Reihenschaltung aus Festwiderstand und Potentiometer realisiert werden.
Dimensionierungsvorschlag: R3 = 10 kΩ und R4 = 100 kΩ. Wird der P-Eingang über einen
Widerstand an Masse gelegt, kann der störende Einfluss der Eingangsruheströme reduziert
werden. Außerdem kann dann über ein Trimmpotentiometer und einem hochohmigen Widerstand
die Offsetspannung von jedem OPV einzeln kompensiert werden.
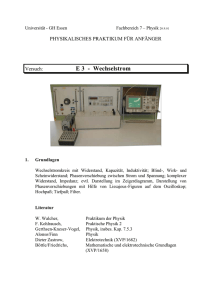
Am Beispiel einer sinusförmigen Eingangsspannung von f = 1 kHz kann das nichtlineare
Verhalten der Präzisionsschaltungen „Tote Zone“ und Ausgangsspannungsbegrenzer gezeigt
werden.
In den beiden nachfolgenden Oszillogrammen ist oben (Kanal 1) jeweils die Eingangsspannung
ue(t) = 10 V · sin(2π·1000 s-1) dargestellt. Kanal 2 ist das jeweilige Ausgangssignal der Schaltung.
„Tote Zone“ mit UT1 = -6 V, UT2 = 2 V
Begrenzer mit UBegr.1 = 7,5 V, UBegr.2 = -5 V
Kanal 2: ua = 5 V / DIV
Vertikal:
Kanal 1: ue = 5 V / DIV
Horizontal: t = 200 µs / DIV
Ein- und Ausgangssignale bei der „Toten Zone“ und beim Begrenzer
G. Schenke, 6.2008
Industrieelektronik
FB Technik, Abt. E+I
32