Skript zur Vorlesung und Labor
Werbung

Grundlagen der
Rechnertechnologie
Dr.-Ing. Wolfgang Heenes
29. September 2010
Version 0.1
Vorwort
Das Ziel dieser Vorlesung und der Übung ist, neben der Vermittlung von Grundkenntnissen in Rechnertechnologie,
die Hinführung zum eigenständigen Arbeiten. Dazu gehört, neben der Aneignung des erforderlichen Fakten- und
Toolwissens, auch die Fähigkeit, komplexere Sachverhalte zu durchdringen und Probleme systematisch zu lösen.
Nichts ist praktischer als eine gute Theorie!
Was sich eher als Aussage zur Rechtfertigung unübersichtlicher Integral- und Differentialgleichungen zu eignen
scheint, hat in dieser Veranstaltung auch im späteren Berufsleben eine zentrale Bedeutung. Auf dem Gebiet der
Forschung und Entwicklung ist die Kontrolle der eigenen Ergebnisse auf Plausibilität und Richtigkeit unverzichtbar. Beim Labor dieser Veranstaltung werden, von den theoretischen Überlegungen in der Versuchsvorbereitung
ausgehend, in der Versuchsdurchführung Schaltungen aufgebaut und ausgemessen. Es werden auftretende Fehler
diskutiert und jeder Versuch wird mit einer Versuchsausarbeitung abgeschlossen, die Fragen zur Ergebniskontrolle enthält.
Diese Skript gliedert sich in zwei Teile.
• In der Theorie werden die grundlegenden Inhalte vermittelt und ausgewählte Übungsaufgaben sollen das
Verständnis vertiefen.
• Das Labor enthält neben der Theorie auch Hinweise zur Simulation und führt in die praktische Arbeit im
Umfeld der Rechnertechnologie ein.
Wolfgang Heenes
Darmstadt, im Frühjahr 2010
1
Inhaltsverzeichnis
I.
Theorie: Vorlesungsinhalte und Übungsaufgaben
6
1. Grundlagen
7
1.1.
1.2.
1.3.
1.4.
1.5.
Die elektrische Ladung . . . . . . . . . . . . . . . . . . . . . . . . . . .
Der elektrische Strom . . . . . . . . . . . . . . . . . . . . . . . . . . .
Die elektrische Spannung . . . . . . . . . . . . . . . . . . . . . . . . .
Der elektrische Widerstand/Ohmsches Gesetz . . . . . . . . . . . .
Idealisierte Quellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1. Ideale Spannungsquelle . . . . . . . . . . . . . . . . . . . . .
1.5.2. Ideale Stromquelle . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.3. Zulässige und nicht zulässige Verbindungen von Quellen
1.5.4. Technisch reale Quelle . . . . . . . . . . . . . . . . . . . . . .
1.6. Die Knotengleichung (1. Kirchhoffsche Gleichung) . . . . . . . . .
1.7. Die Umlaufgleichung (2. Kirchhoffsche Gleichung) . . . . . . . . .
1.8. Einfache Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.8.1. Ideale Stromquellen . . . . . . . . . . . . . . . . . . . . . . . .
1.8.2. Ideale Spannungsquellen . . . . . . . . . . . . . . . . . . . . .
1.8.3. Übungsaufgaben . . . . . . . . . . . . . . . . . . . . . . . . . .
1.9. Superpositionsverfahren (nach Helmholz) . . . . . . . . . . . . . .
1.10.Maschenstromverfahren/Umlaufanalyse . . . . . . . . . . . . . . .
1.11.Knotenanalyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.12.Übungsaufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
8
10
11
12
13
13
13
14
15
15
15
16
16
16
19
20
21
21
2. Ausgleichsvorgänge
2.1. Kondensator . . . . . . . . . . . . . . .
2.1.1. Parallelschaltung . . . . . . .
2.1.2. Reihenschaltung . . . . . . .
2.1.3. Beispiel . . . . . . . . . . . . .
2.2. Die Spule . . . . . . . . . . . . . . . . .
2.2.1. Grundlagen . . . . . . . . . . .
2.2.2. Beispiel . . . . . . . . . . . . .
2.3. Anwendung der Einspeicherformel
25
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
25
27
27
28
30
30
31
33
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
35
38
38
39
41
3. Schaltungen mit Halbleiterbauelementen
3.1. Halbleiter . . . . . . . . . . . . . . . .
3.2. Dioden . . . . . . . . . . . . . . . . . .
3.2.1. Funktionsweise einer Diode
3.2.2. Diodenmodelle . . . . . . . . .
3.2.3. Übungsaufgaben . . . . . . .
35
2
3.3. Bipolar-Transistoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1. Funktionsweise eines Bipolar-Transistors . . . . . . . . . . . . .
3.3.2. Eingangskennlinien . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.3. Ausgangskennlinien . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.4. Übungsaufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4. Übersicht der Schaltkreisfamilien . . . . . . . . . . . . . . . . . . . . . . .
3.4.1. Schaltungstechnische Realisierung mit Bipolar-Transistoren
3.5. Übungsaufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
42
42
44
45
46
47
47
50
4. Der Operationsverstärker in der analogen Anwendung
4.1.
4.2.
4.3.
4.4.
52
Funktionsweise eines Operationsverstärkers . . . . . . . . . . . . .
Der Operationsverstärker als Komparator . . . . . . . . . . . . . . .
Berechnung einfacher Operationsverstärkerschaltungen . . . . . .
Anwendungsbeispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.1. Invertierender Verstärker . . . . . . . . . . . . . . . . . . . . .
4.4.2. Der nichtinvertierende Verstärker . . . . . . . . . . . . . . . .
4.4.3. Unity-Gain Buffer or Voltage Follower (Pufferverstärker) .
4.4.4. Addierer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.5. Integrierer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
52
54
55
55
55
56
57
58
58
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
60
61
64
66
67
67
68
5. Feldeffekttransistoren und CMOS-Logik
5.1. Der Feldeffekt . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.1. Prinzip des MOSFET . . . . . . . . . . . . . . . .
5.1.2. Beispiele . . . . . . . . . . . . . . . . . . . . . . . .
5.1.3. Grundschaltungen mit Feldeffekttransistoren
5.2. CMOS-Technik . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1. Schaltungstechnische Realisierung mit FETs
5.2.2. Im Detail . . . . . . . . . . . . . . . . . . . . . . . .
60
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6. Einführung in die Wechselstromlehre
71
7. Lösungen der Übungsaufgaben
75
8. Schaltkreissimulation
94
II.
99
Labor: Theorie, Simulation, Praxis
9. Grundlagen der Meßtechnik
9.1. Versuchsvorbereitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1.1. Grundlagen des Messens . . . . . . . . . . . . . . . . . . . . . .
9.1.2. Grundeinheiten, abgeleitete Einheiten, Maßsysteme . . . .
9.1.3. Fehlerrechnung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1.4. Das Vielfachmeßgerät/Digitalmultimeter . . . . . . . . . . .
9.1.5. Das Oszilloskop . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1.6. Spannungsteiler, Berechnung eines einfachen RC-Gliedes
9.1.7. Simulation des RC-Glieds mit PSPICE . . . . . . . . . . . . .
9.2. Versuchsdurchführung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.1. Benötigtes Material . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.2. Messungen mit dem Vielfachmeßgerät . . . . . . . . . . . . .
9.2.3. Grundlegende Messungen mit dem Oszilloskop . . . . . . .
9.2.4. Tastkopfabgleich . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.5. Einfache Messungen . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.6. RC-Glied-Messung . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3. Versuchsausarbeitung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3.1. Fragen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
100
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 100
. 100
. 101
. 102
. 106
. 108
. 120
. 121
. 125
. 125
. 125
. 125
. 126
. 127
. 127
. 129
. 129
3
10. Schaltungen mit Halbleiterbauelementen
130
10.1.Versuchsvorbereitung . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.1.1. Dioden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.1.2. Bipolartransistoren . . . . . . . . . . . . . . . . . . . . . . .
10.1.3. Der Operationsverstärker in der analogen Anwendung
10.2.Versuchsdurchführung . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2.1. Benötigtes Material . . . . . . . . . . . . . . . . . . . . . . .
10.2.2. Aufnahme von Diodenkennlinien . . . . . . . . . . . . . .
10.2.3. Aufnahme der Transistor-Ausgangskennlinie . . . . . .
10.2.4. Transistor als Schalter . . . . . . . . . . . . . . . . . . . . .
10.2.5. Rückgekoppelte Operationsverstärkerschaltungen . . .
10.2.6. Der Operationsverstärker als Komparator . . . . . . . .
10.3.Versuchsausarbeitung . . . . . . . . . . . . . . . . . . . . . . . . . .
10.3.1. Fragen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 130
. 130
. 133
. 138
. 141
. 141
. 141
. 142
. 142
. 143
. 143
. 143
. 144
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 145
. 145
. 150
. 156
. 158
. 158
. 158
. 159
. 160
. 160
11. Feldeffekttransistoren und Logik-Familien
11.1.Versuchsvorbereitung . . . . . . . . . . . . . . . . .
11.1.1. Der Feldeffekt . . . . . . . . . . . . . . . . .
11.1.2. Übersicht der Schaltkreisfamilien . . . .
11.1.3. Weitere Kenngrößen von Logikfamilien
11.2.Versuchsdurchführung . . . . . . . . . . . . . . . .
11.2.1. Benötigtes Material . . . . . . . . . . . . .
11.2.2. Aufnahme der Kennlinien . . . . . . . . .
11.2.3. Zeitverhalten . . . . . . . . . . . . . . . . .
11.3.Versuchsausarbeitung . . . . . . . . . . . . . . . .
11.3.1. Fragen . . . . . . . . . . . . . . . . . . . . . .
145
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
12. AD/DA-Wandler
12.1.Versuchsvorbereitung . . . . . . . . . . . . . . . . . . . . . . . . . .
12.1.1. Einführung in die Signalverarbeitung . . . . . . . . . .
12.1.2. Analog-Digital-Wandler . . . . . . . . . . . . . . . . . . . .
12.1.3. Verfahren der AD-Wandlung . . . . . . . . . . . . . . . .
12.1.4. Digital-Analog-Wandler . . . . . . . . . . . . . . . . . . . .
12.1.5. Begriffe und Kenngrößen . . . . . . . . . . . . . . . . . . .
12.2.Versuchsdurchführung . . . . . . . . . . . . . . . . . . . . . . . . .
12.2.1. Benötigtes Material . . . . . . . . . . . . . . . . . . . . . .
12.2.2. Aufbau des AD-Wandlers nach dem Parallelverfahren
12.2.3. Aufbau des DA-Wandlers . . . . . . . . . . . . . . . . . . .
12.3.Versuchsausarbeitung . . . . . . . . . . . . . . . . . . . . . . . . .
12.3.1. Fragen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
161
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 161
. 161
. 164
. 166
. 168
. 168
. 171
. 171
. 171
. 171
. 173
. 173
13.1.Versuchsvorbereitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13.1.1. Schaltnetze – Schaltwerke . . . . . . . . . . . . . . . . . . . . . . . . . . .
13.1.2. Verzögerungszeiten von Schaltnetzen . . . . . . . . . . . . . . . . . . . .
13.1.3. Verschiedene Realisierungen der gleichen booleschen Funktion . . .
13.1.4. Fehlverhalten während der Schaltvorgänge – Einschwingverhalten
13.1.5. Elektrisches Einschwingen . . . . . . . . . . . . . . . . . . . . . . . . . .
13.1.6. Messung kurzer Impulse . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13.2.Versuchsdurchführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13.2.1. Benötigtes Material . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13.2.2. Beschaltung nicht benötigter Eingänge . . . . . . . . . . . . . . . . . . .
13.2.3. Messung der Verzögerungen eines Schaltnetzes . . . . . . . . . . . . .
13.2.4. Einschwingverhalten von Schaltnetzen . . . . . . . . . . . . . . . . . .
13.2.5. Messung kurzer Impulse . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13.3.Versuchsausarbeitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13.3.1. Fragen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 175
. 175
. 175
. 176
. 177
. 178
. 178
. 179
. 179
. 179
. 179
. 180
. 180
. 180
. 180
13. Synthese von Schaltnetzen
175
4
A. t-Verteilung
182
B. Das Netzteil HAMEG HM 8040-2
183
C. Der Funktionsgenerator HAMEG HM 8030-5
185
D. Der Farbcode für Widerstandswerte
187
E. Das Steckbrett
188
F. Fehlersuche
190
G. Form der Versuchsdurchführung
191
H. Die Funktionsplatine
192
I.
Datenblätter
195
J. Vorsatzzeichen
226
K. Hilfsblätter
227
Literaturverzeichnis
230
5
Teil I.
Theorie: Vorlesungsinhalte und
Übungsaufgaben
6
Kapitel 1
Grundlagen
Dieses Kapitel enthält eine Einführung der Begriffe elektrischer Strom und elektrische Spannung. Dabei wird
auf eine anschauliche Darstellung wertgelegt. Nach Erläuterung des elekrischen Widerstands und des ohmschen
Gesetzes werden die Regeln von Kirchhoff vorgestellt. Das Prinzip der idealen Quellen, der Superposition und des
Maschenstromverfahrens werden anhand von einfachen Beispielen eingeführt. Am Ende des Kapitels befinden
sich einige ausgesuchte Übungsaufgaben. Die Lösung zu diesen Aufgaben befindet sich in Kapitel 7.
1.1. Die elektrische Ladung
Bereits aus dem Altertum ist bekannt, dass bei intensiver Berührung (Reibung) mit nachfolgender Trennung von
zwei verschiedenen Körpern, z. B. Hartgummistab1 und Seidentuch, zwischen diesen anziehende oder abstoßende
Kräfte beobachtet werden können.
Beispiel: Zwischen zwei mit Seide geriebenen Hartgummistäben wird Abstoßung beobachtet. Ein mit Seide geriebener Glasstab zieht den Hartgummistab an.
Dieses Phänomen ist mit den Gesetzen der Mechanik (Gravitationskraft) nicht zu erklären. Die beobachteten
Kräfte sind elektrische Kräfte. Die Wirkung dieser Größe nennt man elektrische Ladung. Durch das Reiben haben die Stäbe eine elektrische Ladung Q erhalten. Dem geriebenen Hartgummistab wird dabei willkürlich eine
negative und dem Glasstab eine positive Ladung zugeschrieben.
Erkenntnis: Gleichnamige Ladungen stoßen sich ab, während ungleichnamige Ladungen sich anziehen.
Ladungen lassen sich nicht in beliebig kleine Teilladungen aufteilen. Es gibt eine kleinste Ladungsmenge, die
sogenannte Elementarladung ǫ . Eine Ladung ist demnach immer ein ganzzahliges Vielfaches dieser Elementarladung2 .
Q = n · ǫ wo bei (nεN )
Merke: Ladungen können nicht erzeugt werden oder vernichtet werden. In einem abgeschlossenen System bleibt
die Summe der elektrischen Ladungen konstant.
1
2
Bernstein: Bernstein heißt auf Griechisch elektron.
Stichworte: Bohrsches Atommodell, Valenzband, Protonen, Neutronen, Eletronen.
7
1.2. Der elektrische Strom
Analogie: Flüssigkeitsmenge, die innerhalb einer bestimmten Zeit irgendeinen Querschnitt durchströmt. Die Stärke der Strömung charakterisiert man durch den Quotienten aus Menge und Zeit und nennt ihn die Stromstärke
oder einfach den Strom. Zusätzlich ist der Strom durch seine Richtung gekennzeichnet. Entsprechend definiert
man den elektrischen Strom:
Im =
∆Q
(1.1)
∆t
Dabei bedeutet demnach ∆Q die innerhalb des Zeitraums ∆t durch den betrachteten Querschnitt hindurchtretende Ladung und I m die mittlere Stromstärke während des Zeitraums ∆t . Wenn zu gleichen Zeitintervallen ∆t
unterschiedliche Ladungen gehören, gibt man im allgemeinen den Augenblickswert des Stromes an.
i(t) = lim
∆t→0
∆Q
∆t
=
dQ
dt
(1.2)
Das Auflösen der Gleichung nach der Ladung ergibt die während des Zeitraums ∆t transportierte Ladung:
∆Q = I m · ∆t
(1.3)
Ist die Stromstärke während des Zeitraums ∆t konstant, so schreibt man an Stelle des Mittelwertes I m einfach I .
∆Q = I · ∆t
(1.4)
Bei beliebigem zeitlichen Verlauf des Stromes kann die Ladung, die etwa zwischen den Zeitpunkten t 1 und t 2 durch
den betrachteten Querschnitt hindurchtritt, mit Gleichung 1.2 durch folgende Integration bestimmt werden:
Zt 2
Q=
i(t)d t
(1.5)
t1
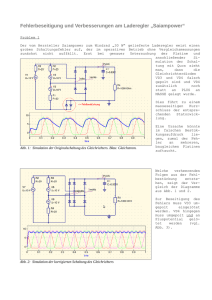
Die durch die Gleichungen 1.1 - 1.5 beschriebenen Zusammenhänge werden in Abbildung 1 veranschaulicht. Einmal für einen zeitlich konstanten Strom, man spricht hier von einem reinen Gleichstrom.
8
Abb. 1: (a) reiner Gleichstrom, (b) reiner Wechselstrom [CW93, S. 19]
Im anderen Fall ist der Strom eine periodische Funktion mit der Periode T , wobei innerhalb dieser Periode genau
so viel Ladung in der einen wie in der anderen Richtung, im Mittel also gar keine Ladung, transportiert wird.
Einen solchen Strom nennt man einen reinen Wechselstrom (b).
Zum Begriff „rein”: Es ist auch denkbar, dass sich ein Gleichstrom und ein Wechselstrom überlagern. Man spricht
dann von einem Wechselstrom mit Gleichanteil. Da die Einheiten des Stromes und der Zeit in dem von uns verwendeten Maßsystem (mksA) bereits festgelegt sind, wird die Einheit der Ladung eine abgeleitete Einheit.
[∆Q] = [I ][∆t] = 1A · 1s = 1 C oul omb = 1 C
(1.6)
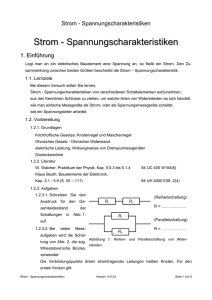
Dem elektrischen Strom ist willkürlich eine Richtung zugeordnet worden. Man betrachtet die Bewegungsrichtung
positiver Ladungsträger als die positive Stromrichtung. Die Bewegungsrichtung der negativen Elektronen z. B. in
einer Elektronenröhre stimmt dann also nicht mit der konventionellen Stromrichtung überein.
Abb. 2: Konventionelle Stromrichtung und Bewegungsrichtung der Elektronen
Der elektrische Strom ist im Wesentlichen durch drei Wirkungen gekennzeichnet.
1. Jeder Strom ist von einem Magnetfeld begleitet.
2. Der Stromfluss ist vor allem bei den Elektrolyten mit einem Stofftransport verbunden.
3. Ein von einem Strom durchflossener Leiter erwärmt sich.
9
Alle drei Wirkungen lassen sich zur Ermittlung der Stromstärke heranziehen:
1. Drehspulinstrument.
2. Silberampere; alte Defintion des Amperes.
3. Hitzdrahtamperemeter.
Eine Bemerkung zum Abschluss: Die Geschwindigkeit freier Elektronen im Leiter beträgt beim Kupferleiter ca.
0.3 mm
. Die Wirkung breitet sich aber mit Lichtgeschwindigkeit aus.
s
1.3. Die elektrische Spannung
Bei der Erläuterung zum elektrischen Strom ist die Frage nach der Ursache offengelassen worden. Es liegt sicherlich nahe, dass eine Kraft erforderlich ist, um die Ladungen im Leiter zu bewegen, und dass mit der Bewegung
ein Energieumsatz verbunden ist.
Zur Verdeutlichung wird Abbildung 3 betrachtet, in der zwei Ladungen Q und q dargestellt sind.
Abb. 3: Zur Änderung der potentiellen Energie beim Verschieben der Ladung q von A nach B
Beide Ladungen haben gleiches Vorzeichen und stoßen sich ab. Bei einer Bewegung der Ladung q von A nach B
nimmt die potentielle Energie dieser Ladung ab, etwa WA auf WB . Die Energiedifferenz wird in kinetische Energie
(Bewegungsenergie) umgewandelt. Damit ist der Vorgang analog zur Bewegung einer Masse im Schwerefeld der
Erde: Ein von A nach B fallender Stein gewinnt eine kinetische Energie, die gleich der Abnahme seiner potentiellen
Energie ist. So wie diese potentielle Energie der Masse proportional ist, so erweist sich die potentielle Energie des
Ladungsträgers als der Ladung proportional:
WA − WB ≈ q
(1.7)
Man führt als Proportionalitätsfaktor auf der rechten Seite die elektrische Spannung ein, die mit U bezeichnet
wird. Damit ergibt sich
WA − WB
q
= UAB
(1.8)
wobei der Index AB ausdrückt, dass die Spannung zwischen den Punkten A und B gemeint ist.
Ganz allgemein nennt man eine „Einrichtung”, in der die bewegten Ladungen potentielle Energie abgeben, einen
Verbraucher und den Quotienten nach Gleichung 1.8 den Spannungsabfall U . Einrichtungen, die die potentielle
Energie der Ladung erhöhen, bezeichnet man als Erzeuger. Die Ausdrücke Verbraucher und Erzeuger haben sich
eingebürgert, obwohl in ihnen weder Energie verbraucht oder erzeugt wird. Es findet eine Umwandlung in andere
Energieformen statt.
Die Richtung der Spannung wählt man bei einem Verbraucher im allgemeinen genau so, wie die des Stromes.
10
Abb. 4: Richtung von Strom und Spannung bei Verbrauchern und Erzeugern
Aus Gleichung 1.8 ergibt sich die Einheit der Spannung:
[U] =
[W ]
[q]
=
1J
1As
=
1W
1A
= 1V ol t = 1V
(1.9)
Aus den Betrachtungen sollte auch gelernt werden:
• Eine Spannung liegt an ...
• Ein Strom fließt ...
Falsch hingegen ist:
• Da liegt ein Strom an ...
• Die Spannung fließt ...
1.4. Der elektrische Widerstand/Ohmsches Gesetz
Betrachtet werde der folgende Stromkreis:
+
I
U
R
U
−
Abb. 5: Stromkreis
Wird U größer, so wird auch I größer.
Der Strom wird auch größer, wenn der Wert R des Widerstands abnimmt. Speziell in einem metallischen Leiter ist
der Strom der Spannung streng proportional (solange auch die Temperatur konstant gehalten wird). Damit ergibt
sich die folgende Beziehung.
U≈I
(1.10)
Der nun einzuführende Proportionalitätsfaktor R bezeichnet den ohmschen Widerstand. Die folgenden Gleichungen beschreiben das Ohmsche Gesetz.
U =R·I
U
I=
R
U
R=
I
(1.11)
(1.12)
(1.13)
11
Abbildung 6 zeigt die Widerstandsgerade.
Abb. 6: Widerstandsgerade
Die Einheit von R ist:
[R] =
Den Kehrwert G =
1
R
[U]
[I ]
=
1V
1A
= 1Ohm = 1Ω
(1.14)
nennt man Siemens. Abbildung 7 zeigt die Leitwertgerade.
Abb. 7: Leitwertgerade
1.5. Idealisierte Quellen
In der Elektrotechnik ist die idealisierte unabhängige Quelle ein Grundelement in der Schaltungsanalyse. Die
Quellen heißen idealisiert, weil sie in der Praxis nicht realisierbar sind. Der Begriff unabhängig kommt daher,
dass egal wie das bestehende Netzwerk z. B. eine Spannungsquelle belastet, die Ausgangsspannung der Quelle
konstant ist.
Es wird zwischen zwei Quellen unterschieden:
12
1.5.1. Ideale Spannungsquelle
+
U
−
Abb. 8: Spannungsquelle
Eigenschaften:
• Spannung (Betrag, Richtung)
• kein Innenwiderstand (deswegen Symbol)
• kein Stromfluss ohne Verbraucher
• Kurzschluss nicht zulässig
1.5.2. Ideale Stromquelle
I
Abb. 9: Stromquelle
Eigenschaften:
• Strom (Betrag, Richtung)
• unendlich hoher Innenwiderstand (deswegen Symbol)
• Leerlauf nicht zulässig
1.5.3. Zulässige und nicht zulässige Verbindungen von Quellen
I
1
I
2
I
R
R
U
R
Abb. 10: Parallele Stromquellen (zulässig)
13
IR
U1
R
UR
U2
Abb. 11: Serielle Spannungsquellen (zulässig)
I1
I2
R
Abb. 12: Serielle Stromquellen (nicht zulässig)
U1
U2
R
Abb. 13: Parallele Spannungsquellen (nicht zulässig)
Warum das nicht zulässige Verbindungen sind, kann man sich anhand der Kirchhoffschen Gleichungen überlegen.
1.5.4. Technisch reale Quelle
Ri
Uq
UL
Abb. 14: Technisch reale Spannungsquelle
Kenngrößen:
• Uq - Quellenspannung
• U L - Leerlaufspannung
• I K - Kurzschlussstrom
• R i - Innenwiderstand
14
1.6. Die Knotengleichung (1. Kirchhoffsche Gleichung)
Wenn mehrere Leitungen (Zweige) in einem Knoten leitend miteinander verbunden sind, so ist die Summe der
zufliessenden Ströme ( I 1 , I 2 , I 3 ) gleich der Summe der abfliessenden Ströme ( I 4 , I 5 ).
I1 + I2 + I3 = I4 + I5
X
I zu =
X
I ab
(1.15)
(1.16)
Man sagt: in einem Knoten können keine Ladungen und damit auch keine Ströme verschwinden oder entstehen.
n
X
Iv = 0
(1.17)
v =1
Abb. 15: Beispiele für Knoten und Zählpfeilrichtung
1.7. Die Umlaufgleichung (2. Kirchhoffsche Gleichung)
Allgemein gilt in beliebig komplizierten Netzen in beliebigen Umläufen, die n-Spannungen umfassen:
n
X
Uv = 0
(1.18)
v =1
1.8. Einfache Beispiele
Im Folgenden sollen einige einfache Beispiele mit den eben vorgestellten Kirchhoffschen Gleichungen und dem
Ohmschen Gesetz bearbeitet werden.
15
1.8.1. Ideale Stromquellen
K
I1
IR
I2
UR
Abb. 16: Schaltung mit zwei Stromquellen
Summe der Ströme am Knoten K:
I1 + I2 = IR
Ströme, die auf den Knoten zufliessen, zählen positiv.
1.8.2. Ideale Spannungsquellen
IR
U1
R
UR
U2
Abb. 17: Schaltung mit zwei Spannungsquellen
UR − U2 − U1 = 0
UR = U2 + U1
Der Umlaufsinn ist beliebig. Wenn Umlaufsinn und Spannungspfeil die gleichen Richtungen haben, dann positiv
zählen.
Warum es unzulässige Verbindungen gleicher Quellen gibt, sollte jetzt klar sein. Die Kirchhoffschen-Regeln (Gesetze) müssen immer erfüllt sein.
1.8.3. Übungsaufgaben
Aufgabe 1.1: Spannungsteiler
16
R1
UR 1
U0
R2
UR
2
Abb. 18: Spannungsteiler
Gegeben sind die Grössen U0 , R 1 und R 2 . Leiten sie die Formeln für die Spannungen UR1 und UR2 in Abhängigkeit
von den gegebenen Grössen her. (Spannungsteilerformel)
Aufgabe 1.2: Stromteiler
I0
IR1
IR2
R1
UR1
R2
UR2
Abb. 19
Gegeben sind die Grössen I 0 , R 1 und R 2 . Leiten sie die Formeln für die Ströme I R1 und I R2 in Abhängigkeit von den
gegebenen Grössen her. (Stromteilerformel)
Aufgabe 1.3:
Folgende Größen des untenstehenden Netzwerks sind bekannt:
Uq = 20V
(1.19)
R 1 = R 4 = 10kΩ
(1.20)
R 2 = 3kΩ
(1.21)
R 3 = 5kΩ
(1.22)
R 5 = 7kΩ
(1.23)
17
R
U
q
R
1
I
2
R
1
R
U
4
3
3
R
3
5
2
Abb. 20: Netzwerk
a) Welches Bauteil kann weggelassen werden und warum?
b) Berechnen Sie I 3 und U3 mittels eines Spannungsteilers.
18
1.9. Superpositionsverfahren (nach Helmholz)
In der Praxis ist es denkbar, dass mehrere Quellen in einer Schaltung zum Einsatz kommen.
Eine Schaltung, die eine Strom- und eine Spannungsquelle enthält, ist in folgender Abbildung dargestellt.
K1
I R3
UR2
R1
UR1
U
IR2
IR1
R2
M1
M2
I
U1
RR3
U3
Abb. 21
Gesucht ist die Spannung UR2 über dem Widerstand R 2 . Vorgehensweise:
• Der Reihe nach bis auf jeweils eine Spannungsquelle alle anderen Spannungsquellen kurzschliessen bzw.
alle Stromquellen entfernen.
• Die gesuchte Netzwerkgröße ausrechnen (in diesem Fall UR2 ) für die jeweils angeschlossene Quelle.
• Die Teilergebnisse werden addiert.
In diesem Beispiel gibt es zwei Quellen. Somit müssen zwei Teilergebnisse berechnet werden, die dann addiert
werden.
1. Spannungsquelle kurzschliessen
R1
R1
I
UR21
I
R2
R2
R3
R3
R2 * R 3
R2 + R3
U R3
Abb. 22
UR2 = I ·
1
R2 · R3
R2 + R3
(erstes Teil er g ebnis)
2. Stromquelle entfernen
19
IU
IU
IR2
IR2
R2
R1
U
UR2II
U R2II
U
R2
M1
R3 UR3
UR3
R
3
Abb. 23
Linker Zweig offen: irrelevant (kein Strom, keine Spannung)
(M1) UR2 − UR3 − U = 0
2
mi t
UR3 = R 3 · I U
UR2 = −R 2 · I U
2
U + R3 · I U + R2 · I U = 0
U
IU = −
R2 + R3
UR2 =
2
R2
R2 + R3
· U (zwei tes Teil er g ebnis)
3. Superposition
UR2 = UR2 + UR2
1
2
Ergebnis:
UR2 =
R2 · R3
R2 + R3
·I+
R2
R2 + R3
· U (v g l.o ben)
1.10. Maschenstromverfahren/Umlaufanalyse
Alle bisherigen Verfahren zur Bestimmung der Ströme I haben einige Überlegungen erfordert. Das Maschenstromverfahren ist schematisch anwendbar. Hier werden einige topologische Grundbegriffe eingeführt und in
Übungsaufgabe 2 wird es an einem Beispiel angewendet.
Zweig: Kette von Zweipolen (Quelle, Widerstand) und Verbindungsleitungen, die alle vom selben Strom durchflos-
sen werden. Ein Zweig liegt immer zwischen zwei Knoten.
Knoten: Verbindungspunkt mehrerer Zweige
Masche: in sich geschlossene Kette von Zweigen
Begriff des vollständigen Baumes: Linienkomplex, der alle Knoten miteinander verbindet, ohne geschlossenen
Umlauf. Bei 2 Knoten gibt es 1 Baumzweig. Allgemein: Bei k Knoten gibt es b = k − 1 Baumzweige.
Der nächste Begriff ist der Verbindungszweig: Darunter versteht man alle Zweige, die nicht zum Baum gehören.
Man sagt: Die Ströme in den Verbindungszweigen sind unabhängige Ströme und die Ströme in den Baumzweigen
sind abhängige Ströme. Die Gleichung m = z − (k − 1) gibt nun die Anzahl der unabhängigen Gleichungen an, die
in dem Netzwerk aufgestellt werden können. Dabei ist z die Gesamtzahl an Zweigen.
Nun ist die Anzahl der unabhängigen Gleichungen bekannt. Eine Regel zur Aufstellung eines linear unabhängigen Gleichungssystems lautet wie folgt: Wenn jeder Umlauf nur einen Verbindungszweig enthält und sonst nur
Baumzweige, dann sind die Umlaufgleichungen linear unabhängig.
20
Das Maschenstromverfahren ist zu empfehlen bei mehreren gesuchten Größen. Der Ausgangspunkt ist das 2.
Kirchhoffsche Gesetz. Die Vorgehensweise ist folgende:
1. Vollständigen Baum einzeichnen
2. Maschenströme eintragen
3. Maschengleichung aufstellen
4. Gleichungssystem lösen
5. Aus dieser Lösung alle gesuchten Ströme mittels 1. Kirchhoffschen Gesetz berechnen
Regeln zum Aufstellen des Gleichungssystems:
• Die Diagonalelemente der Widerstandsmatrix sind positiv und gegeben durch die Summe der Widerstände
in der Masche i.
• Alle anderen Elemente bezeichnet man als Kopplungswiderstände. Das sind Widerstände, die in der Masche
i1 und der Masche i2 gemeinsam vorkommen. Das Vorzeichen ist positiv bei gleichsinnigem Durchlauf der
Maschenströme. Das Vorzeichen ist negativ bei gegensinnigem Durchlauf der Maschenströme.
Kontrolle: Die Widerstandsmatrix ist symmetrisch zur Hauptdiagonalen!
1.11. Knotenanalyse
Eine Beschreibung der Knotenanalyse ist z. B. in [CW93, S. 101 ff.] zu finden.
1.12. Übungsaufgaben
Aufgabe 1.4:
Für folgende Schaltung soll die klemmäquivalente Ersatzstromquelle durch Superposition errechnet werden.
R3
I0
U0
R1
R2
R4
Abb. 24
Gegeben sind:
• I0
• U0
• R 1 = 3R
• R2 = R3 =
R
2
• R4 = R
a) Berechnen sie den Innenwiderstand des Netzwerkes.
b) Errechnen sie den Kurzschlussstrom I K ′ , der von der Stromquelle hervorgerufen wird.
c) Errechnen sie den Kurzschlussstrom I K ′′ , der von der Spannungsquelle hervorgerufen wird.
d) Geben sie den resultierenden Gesamtkurzschlussstrom I K an.
21
Aufgabe 1.5:
Zur Demonstration der verschiedenen Verfahren: Gegeben ist folgendes Netzwerk.
U1 I1
R1
U
I2
R2
U2
I3
R3
U3
Abb. 25
Folgende Größen sind gegeben:
• U = 10V
• R 1 = 5Ω
• R 2 = 10Ω
• R 3 = 20Ω
Bestimmen sie für folgende Verfahren jeweils die Ströme I 1 , I 2 und I 3
a) Ohmsches Gesetz
b) Gleichungssystem mit Kirchhoff/Ohmsches Gesetz
c) Ersatzspannungsquelle
d) Maschenstromverfahren
22
Aufgabe 1.6:
I6
R6
Ic
I4
I5
R4
U1
R5
U3
U2
I2
I1
R1
Ia
R2
I3
Ib
R3
Abb. 26
a) Wieviel Knoten enthält dieses Netzwerk?
b) Im obigen Netzwerk ist der vollständige Baum vorgegeben (T-Form). Warum ist es zum Aufstellen des Gleichungssystems wichtig, einen vollständigen Baum eingeführt zu haben?
c) Stellen sie mittels Maschenstromverfahren das lineare Gleichungssystem auf. Benutzen sie die im Netzwerk
eingezeichneten Umläufe.
d) Welche Form hat die Widerstandsmatrix?
23
Aufgabe 1.7:
Gegeben ist folgendes Netzwerk:
Abb. 27
Die Anwendung des Maschenstromverfahrens führte auf folgendes Gleichungssystem:
R 11
R5 + R6
R3 + R6
R3 + R6
I1
0
R6
· I 2 = −U0
R 33
I4
0
R5 + R6
R 22
R6
Ermitteln Sie die Koeffizienten R 11 , R 22 , R 33 als Funktion der Zweigwiderstände.
Aufgabe 1.8:
Gegeben sei das untenstehende Netzwerk mit den folgenden Größen:
• R 1 = R 2 = R 3 = 2R
• R4 = R5 = R
• U1 = U2 = U
• U3 = 2U
U5
I5
U1
U3
Ia
R1
R5
U2
Ib
R2
Ic
R4
R3
Abb. 28
a) Stellen sie das Gleichungssystem mittels Maschenstromverfahren auf. Benutzen sie die eingezeichneten
Umläufe.
b) Berechnen sie den Strom I 5 .
c) Geben sie die Zweigspannung U5 an.
24
Kapitel 2
Ausgleichsvorgänge
Dieses Kapitel führt die Netzwerkelemente Kondensator und Spule ein. Anhand von Beispielen werden die zwei
Verfahren, Einspeichernetzwerkformel und Differentialgleichung, zum Berechnen der Ausgleichsvorgänge vorgestellt.
2.1. Kondensator
Kondensatoren (condensare (lat.): verdichten) sind Bauelemente, die zur Speicherung elektrischer Ladungen dienen. Sie bestehen im Prinzip aus zwei Metallflächen, die sich, voneinander isoliert, sehr dicht gegenüberstehen.
inhomogenes Feld
+
+
+
+
homogenes Feld
−
−
−
−
Fläche A
Q
d
+
−
U
Abb. 29: Kondensator
X
Q = Q + + Q − = 0; Gesamtl adung ist N ul l
Mit obiger Anordnung wird der Kondensator aufgeladen.
25
inhomogenes Feld
+
+
+
+
homogenes Feld
−
−
−
−
Fläche A
d
Abb. 30: Kondensator
Wird jetzt der Abstand d vergrößert, so steigt (ändert sich) die Spannung. Die Ladung Q ist aber konstant.
Das heißt: U ∼ Q
Ähnlich wie beim Widerstand wird ein Proportionsfaktor eingeführt.
Damit ergibt sich:
Q=C·U
(2.1)
Der Faktor C hängt von der Geometrie der Platte ab. Neben dem Abstand d geht auch die Plattenfläche A ein.
Außerdem geht noch die sog. Dielektrizitätskonstante ein.
C=
ǫ·A
(2.2)
d
Die Einheit der Kapazität ist:
[C] =
[Q]
[U]
=
A· s
V
= Farad
(2.3)
Geht man davon aus, dass die Spannung sich zeitlich ändert, so ergibt sich:
∂Q
∂t
=C·
∂ u(t) ∂ Q
;
ist i(t) (vgl. 1. Kapitel)
∂t
∂t
i(t) = C ·
∂ u(t)
∂t
(2.4)
(2.5)
Der Strom am Kondensator ist also proportional zur Spannungsveränderung. Die Gleichung kann auch umgestellt
werden:
u(t) =
1
C
Z
·
i(t)d t
(2.6)
26
2.1.1. Parallelschaltung
U
C1
Ci
Cn
Abb. 31: Parallelschaltung von Kondensatoren
Bei der Parallelschaltung von Kondensatoren ist die Spannung an allen Kondensatoren gleich groß. Es gilt hier:
U 1
C 1
C 2
U 2
U
U = U1 = U2
Für die Ladungen gilt:
= >
Q ges = Q 1 + Q 2
Q ges
U
Q ges
U
C g e s
=
Q1
U
+
Q2
U
=
Q1
U1
+
Q2
U2
C ges = C1 + C2
U
Abb. 32
Gesamtkapazität = Summe der Teilkapazitäten
2.1.2. Reihenschaltung
+
C1
U1
Ci
Ui =Q\Ci
Cn
Un
−
+
U
−
+
−
Abb. 33: Reihenschaltung von Kondensatoren
Nach dem Kirchhoffschen Gesetz ergibt sich für die Spannung:
27
U 1
U 2
C 1
C 2
U = U1 + U2
Für die Ladungen gilt:
U
Q ges = Q 1 = Q 2
= >
C g e s
U
Q ges
=
U1
Q ges
U
Q ges
=
U1
Q1
+
U2
Q2
1
C ges
=
1
C1
+
1
C2
+
U2
Q ges
(analog zur entsprechenden Berechnung des Gesamtleitwertes
einer Reihenschaltung von Widerständen)
U
Abb. 34
Gesamtkapazität über die Kehrwerte der Einzelkapazitäten zu errechnen
2.1.3. Beispiel
Betrachtet wird folgende Schaltung:
S
UR
R
C
UC
U
Abb. 35: Einspeichernetzwerk
Zum Zeitpunkt t = 0 wird der Schalter geschlossen.
Berechnen und skizzieren sie UC (t), I C (t) und UR (t).
An Kapazitäten ist kein Spannungssprung möglich. Das heißt, ohne den Widerstand R kann man obige Schaltung
nicht analysieren. (2. Kirchhoffsches Gesetz)
Analyse aus der Anschauung:
• Fließt bei offenem Schalter ein Strom? - Nein.
Also ist I C (t) = 0
• Die Spannung UR (t) ist auch Null, da UR (t) = R · I C (t) !
• UC (t) soll laut Aufgabenstellung ungeladen sein, also UC (t) = 0.
• Jetzt wird der Schalter geschlossen!
• Da die Spannung am Kondensator sich nicht sprunghaft ändern kann, muss die gesamte Spannung an UR
abfallen, denn die Maschengleichung U = UR + UC muss gültig sein. Ein Spannungsabfall an R setzt aber ein
Strom vorraus. Dieser Strom fließt in der Tat (und ist maximal).
28
• Sehr viel später ist der Kondensator geladen (Q+ und Q− ). Da die Kondensatorplatten sich nicht berühren,
besteht kein geschlossener Stromkreis mehr. I C ist also Null.
• Wenn I C (t) Null ist, muss, nach UR (t) = R · I C (t), UR (t) auch Null sein. Da Kirchhoff immer noch gilt, ist
UC (t) = U .
• Die Zeit, die der Kondensator
R braucht, um sich wieder aufzuladen, hängt von der Kapazität ab. Außerdem
ist die Beziehung UC = C1 · i(t)d t bekannt. Auch die Stromstärke geht in die Zeit ein, die der Kondensator
braucht um sich aufzuladen. Der Strom ist außerdem vom Widerstand R abhängig.
• Man führt eine Zeitkonstante τ ein. τ hängt von „Innenwiderstand” R i und von C ab.
• Zur rechnerischen Bestimmung von R i wird folgendes Schaltbild herangezogen:
R
*
Abb. 36
Der Energiespeicher wird dem Netzwerk entnommen. Die Spannungsquelle wird kurzgeschlossen (Eigenschaft einer idealen Spannungsquelle: R i = 0 ). Dann wird bezüglich * der Widerstand berechnet. Die Zeitkonstante τ ergibt sich dann zu:
τ=R·C
Herleitung über Definition später
(2.7)
• Betrachtet wird wieder das vollständige Netzwerk:
R
UR
Uc
U
Abb. 37: Einspeichernetzwerk
Ein Maschenumlauf würde UR + UC = U ergeben.
Ein Term für UR ist: UR = R · I
R
Für UC ergibt sich: UC = C1 i(t)d t
Eingesetzt in die Maschengleichung ergibt sich: R · i(t) +
′
Differenzieren ergibt: R · i (t) +
1
C
1
C
·
R
i(t)d t
· i(t) = U
Die Gleichung nennt man eine Diffentialgleichung 1. Ordnung. Sie ist gekennzeichnet dadurch, dass die
Funktion i(t) und die Ableitung vorkommt. 1. Ordnung deswegen, weil die höchste Ableitung die 1. Ableitung
ist.
• Eine Lösung dieser Gleichung gibt die sog. Einspeicherformel an. Sie gilt nur für Netzwerke mit einem
Energiespeicher.
Allgemein lautet sie (Herleitung später):
t
t
x(t) = x(0+ ) · e− τ + x(∞) · (1 − e− τ )
(2.8)
• Speziell für diesen Fall, dass wir den Verlauf des Stromes zu jedem Zeitpunkt ausrechnen möchten, ergibt
sich:
t
t
I C (t) = I C (0+ ) · e− τ + I C (∞)(1 − e− τ )
29
Die Zeitkonstante τ ist bekannt (s.o).
I C (∞) = 0
I C (0+ ) =
U
R
Kurzschluss des Kondensators
U
I C (t) =
R
t
· e− τ
• Für die Spannung UC (t) ergibt sich analog:
t
t
UC (t) = UC (0+ ) · e− τ + UC (∞)(1 − e− τ )
UC (0+ ) = 0; Spannung macht am Kondensator keine Sprünge
UC (∞) = U
t
UC (t) = U · (1 − e− τ )
In allen Aufgaben werden als Anregung stets Gleichspannungen angenommen. In der Praxis (z. B. Frequenzbereich eines Lautsprechers) werden Kondensator und Spule mit Wechselspannungen angeregt.
2.2. Die Spule
2.2.1. Grundlagen
Der Zustand des Raumes (z. B. zwischen zwei Kondensatorplatten), der an ruhende Ladungen gebunden ist, wird
durch das elektrische Feld charakterisiert.
Analog kennzeichnet man den besonderen Raumzustand, der an bewegte Ladungen gebunden ist, durch das magnetisches Feld. Bewegte Ladungen bedeuten Stromfluß. Deshalb ist jeder stromdurchflossene Leiter von einem
Magnetfeld umgeben.
Wird der stromdurchflossene Draht zu einer Spule geformt, so entsteht im Spuleninneren ein homogenes magnetische Feld. Das besondere gegenüber dem elektrischen Feld ist, dass die magnetischen Feldlinien in sich
geschlossen sind (elektrische Feldlinien beginnen/enden auf Ladungen) und es offenbar keine magnetischen Ladungen gibt.
Abb. 38: Geometrie einer Spule
30
Im Rahmen dieser Vorlesung wird die Spule wiederum nur bei zeitlich veränderlicher Größe betrachtet (Ausgleichsvorgänge).
Die Strom - Spannungsbeziehung (ohne Herleitung) lautet:
U L (t) = L ·
Die Einheit ergibt sich: L: Induktivität, [L] =
∂ i(t)
∂t
Us
A
oder i L (t) =
1
L
Z
·
(2.9)
U L (t)d t
1
= H = Henr y
Anmerkung: An Induktivitäten kein Stromsprung möglich!
2.2.2. Beispiel
UR
a
R
b
U
i(t)
UL
L
Abb. 39: Netzwerk
Es gibt zwei Maschengleichungen für die zwei Schalterstellungen:
a) UR + U L − U = 0
b) UR + U L = 0
Gesucht wird wieder der Verlauf des Stroms i(t).
Anhand dieses Beispiels wird die Lösung 1.) durch Lösen der Differentialgleichung und 2.) durch Anwendung der
Einspeichernetzwerkformel ermittelt.
Für den Fall, dass der Schalter in Stellung a) liegt, ergibt sich:
UR
i(t)
R
U
UL
L
Abb. 40: Netzwerk
Die Maschengleichung: UR + U L − U = 0, das ohmsche Gesetz: UR = R · i und U L = L ·
R · i(t) + L ·
∂ i(t)
∂t
∂ i(t)
∂t
liefern:
=U
Hierbei handelt es sich um eine Diffentialgleichung 1. Ordnung. Da die rechte Seite nicht Null ist, spricht man
auch von einer inhomogenen Differentialgleichung.
Ohne Beweis:
Aus einer speziellen Lösung der inhomogenen Differentialgleichung und der allgemeinen Lösung der homogenen
Differentialgleichung ergibt sich die allgemeine Lösung der inhomogenen Differentialgleichung durch Addition.
1
amerikanische Physiker
31
1.Schritt Lösung der homogenen Differentialgleichung:
L·
∂ i(t)
∂t
∂ i(t)
∂t
+ R · i(t)
R
+
L
· i(t)
=
0|:L
=
0
t
Ansatz: i(t) = k · e− τ
Eingesetzt ergibt sich:
−
1
τ
R
t
· e− τ +
L
t
t
· K · e− τ
K · e− τ (−
1
τ
+
R
)
L
=
0
=
0
Diese Gleichung muss für alle Zeiten erfüllt sein.
!
Also: (− τ1 + RL ) = 0
Man nennt diese Gleichung auch charakteristische Gleichung:
τ=
L
(2.10)
R
2.Schritt Spezielle Lösung der inhomogenen Differentialgleichung:
Verfahren: Variation der Konstanten.
R
i(t) = c(t) · e− L ·t
R
R
i ′ (t) = c ′ (t) · e− L ·t − c(t) · e− L ·t
Eingesetzt in die inhomogene Differentialgleichung ergibt sich:
∂ i(t)
′
c (t) · e
− RL ·t
− c(t) ·
R
L
·e
− RL ·t
+
∂t
R
L
+
R
L
· i(t)
· c(t) · e
=
− RL ·t
=
U
L
U
L
c(t) bestimmen:
R
c ′ (t) · e− L ·t
=
c(t)
=
c(t)
=
c(t)
=
U
ZL
U
R
· e L ·t
L
L U R ·t
· · e L + K (K sei N ul l.)
R L
U R ·t
·eL
R
Der Strom ergibt sich also zu:
i(t) =
R
e− L ·t}
|K · {z
+
Lösung der homogenen Di f f erent ial gleichung
U
R
R
· e L ·t ·e− L ·t
R
| {z }
c(t)
R
i(t) = K · e− L ·t +
U
R
32
Anfangsbedingung einarbeiten: i(t = 0) = 0
Eingesetzt ergibt sich:
K · e0 +
=
0
=
K
−
U
R
U
R
Die Gesamtlösung mit Anfangsbedingung ist also:
i(t)
=
−
U
=
R
U
R
R
· e− L ·t +
(1 − e
− RL ·t
U
R
)
Kontrolle durch Einspeichernetzwerkformel:
UR
i(t)
R
U
L
UL
Abb. 41: Netzwerk
Zum Zeitpunkt t = 0 wird der Schalter geschlossen.
Vorgehensweise zum Bestimmen von τ: Spannungsquelle kurzschließen und Energiespeicher entfernen.
R
Ri
Abb. 42: Ersatzschaltung
Damit ergibt sich: τ =
L
R
t
t
i(t) = i(0+ ) · e− τ + i(∞) · (1 − e− τ )
Der Strom kann an der Spule keine Sprünge machen. Für i(0+ ) ergibt sich also Null: i(0+ ) = 0A. Wenn sich
das magnetische Feld aufgebaut hat, verhält sich die Spule wie ein Leiter: i(∞) = UR .
Eingesetzt ergibt sich:
i(t) =
U
R
R
· (1 − e− L ·t ) (s.o.!)
Der Fall, dass der Schalter in Stellung b) liegt kann zu Übungszwecken gerechnet werden. (Stichwort: Homogene
Differentialgleichung, Anfangsbedingung oder Einspeichernetzwerkformel)
2.3. Anwendung der Einspeicherformel
Voraussetzungen: Im Folgenden werden nur Netzwerkanregungen (Generatorspannungen und -ströme) behandelt, die höchstens Unstetigkeiten in Form von Sprüngen endlicher Amplitude besitzen.
Gegeben sei ein Einspeichernetzwerk, d. h. ein Netzwerk aus Spannungs- und Stromquellen, ohmschen Widerständen, idealen Schaltern und einem Energiespeicher (Spule oder Kondensator).
33
Nach einem Schaltvorgang zur Zeit t = t 0 hat der Strom oder die Spannung in einem beliebigen Zweig dieses
Netzwerks den Verlauf:
x(t)
t−t 0
τ
t−t 0
+ x(∞) · 1 − e− τ
=
x(t 0 ) · e−
=
t−t 0
x(∞) + x(t 0 ) − x(∞) · e− τ
Zeichenerklärung:
τ
Zeitkonstante des Lade- oder Entladevorgangs
τ = R i · C wenn der Energiespeicher ein Kondensator ist (τ > 0)
τ = RL wenn der Energiespeicher eine Spule ist (τ < ∞)
t0
Zeitpunkt des Schaltaugenblicks.
Ri
Innenwiderstand des Netzwerks bezüglich der Klemmen des Energiespeichers, wobei R i > 0.
i
x(t 0 )
Anfangswert im Schaltaugenblick t = t 0 . Er kann durch eine Netzwerkanalyse, bei welcher
der Kondensator durch einen Kurzschluß/Spannungsquelle, bzw. die Spule durch eine Unterbrechung/Stromquelle ersetzt wird, ermittelt werden.
x(∞)
Endwert für t → ∞. Man erhält ihn durch Analyse des Netzes im stationären Zustand, wobei der
Kondesator durch eine Unterbrechung, die Spule durch eine Kurzschluß ersetzt wird.
34
Kapitel 3
Schaltungen mit
Halbleiterbauelementen
Dieses Kapitel gibt eine kurze Einführung in Halbleiterbauelemente. Nach Vorstellung von Diode und BipolarTransistor werden verschiedene Transistorgrundschaltungen vorgestellt. Im zweiten Teil des Kapitels werden
ausgewählte Schaltkreisfamilien im Logik-Entwurf vorgestellt.
3.1. Halbleiter
Halbleiter sind Stoffe, deren Leitfähigkeit in einem größeren Bereich zwischen den reinen Metallen und den Isolatoren liegt. Für die praktische Anwendung von Halbleiterwerkstoffen für die Herstellung von Bauelementen
haben heute die Elemente Germanium (Ge) und Silizium (Si) die größte Bedeutung. Folgende Abbildung zeigt das
Periodensystem und die Verwendung der wichtigsten Halbleiterelemente.
35
Abb. 43: Die wichtigsten Halbleiter Elemente
• III., IV. und V. sind die Spalten des Periodensystems
• Die Spalte entspricht der Valenz (Ladungszahl).
Silizium (Si) wichtigstes Halbleiterelement
Gallium-Arsenid (Ga-As) Dieses findet in hochfrequenten Anwendungen seinen Einsatz.
Germanium (Ge) Früher war dies dass am meisten verwendete Element.
Indium-Phosphit (In-P) Wird in der Opto-Elektronik eingesetzt, z. B. für Leuchtdioden.
Die unterschiedlichen Halbleiter unterscheiden sich auch durch die Energie, die benötigt wird, Elektronen aus
dem Valenzband in das Leitungsband zu transportieren. So ist z. B. zu vermuten, dass Germaniumdioden eine
andere Knickspannung als Siliziumdioden haben.
111111111111111111111
000000000000000000000
000000000000000000000
111111111111111111111
000000000000000000000
111111111111111111111
000000000000000000000
111111111111111111111
000000000000000000000
E111111111111111111111
000000000000000000000
111111111111111111111
0
C1
Conduction band
0
1
0
1
0
1
EG = Energy bandgap
0
1
0
1
0
1
000000000000000000000
Valence band
0
E111111111111111111111
000000000000000000000
111111111111111111111
V1
000000000000000000000
111111111111111111111
000000000000000000000
111111111111111111111
000000000000000000000
111111111111111111111
000000000000000000000
111111111111111111111
000000000000000000000
111111111111111111111
Abb. 44: Halbleiter Materialien
36
Halbleiter
Kohlenstoff (Diamand)
Silizum
Germanium
Zinn
Gallium Arsenid
Indium-Phosphit
Bor-Nitrid
Silizium-Karbid
Kadmiumselenide
Energie des Bandabstandes EG (eV )
5.47
1.12
0.66
0.082
1.42
1.35
7.50
3.00
1.70
Wenn z. B. Siliziumatome in einem Gitter angeordnet werden, ergibt sich folgende Struktur:
Si
Si
Si
Si
Si
Si
Abb. 45
Eine kovalente Bindung besteht aus zwei Elektronen zwischen den jeweils nächsten Nachbarn.
Dies hat zur Konsequenz, dass jedes Atom praktisch 8 Elektronen in der äusseren Hülle besitzt. Daraus folgt ein
stabiler Zusand des Atoms.
Durch das Einbringen von Elementen aus der 5. bzw. 3. Spalte des Periodensystems lassen sich n-leitende und
p-leitende Materialien herstellen. Die folgende Abbildung zeigt die Wirkung, die das Einbringen von Phosphor
hervorruft.
Si
Si
Si
−q
+q
Si
P
Si
Abb. 46
• Das Einfügen von Verunreinigungen in der regelmässigen Struktur des Siliziums wird Dotieren (impurity
doping) genannt.
• Es gibt zwei verschiedene Arten des Dotierens:
– Donator (Spalte V)
– Acceptor (Spalte III)
• z. B. Phosphor (Spalte V) besitzt ein zusätzliches Elektron, welches frei ist. Daher kommt der Begiff Donator
(lat.: donare = geben)
Durch das Einbringen eines Bohratoms ergibt sich folgendes:
37
Si
Si
Si
B
Si
vacancy
Si
Abb. 47
• Verunreinigungen aus der dritten Spalte des Periodensystems haben ein Elektron weniger als Silizium in
ihrer äusseren Hülle. So fehlt für die kovalente Bindung ein Elektron. Der Begiff Acceptor beschreibt genau
diesem Sachverhalt (lat.: accipere = annehmen, akzeptieren)
• Silizium, welches derart verunreinigt ist, wird p-Typ Material genannt, da es eine positive Ladung trägt
(Löcher).
• Silizium dotiert mit Donatoren wird n-Typ Matrial genannt.
3.2. Dioden
3.2.1. Funktionsweise einer Diode
Die Diode besteht aus zwei unterschiedlich dotierten Bereichen. Im p-Bereich wurde durch Einbringen von dreiwertigen Elementen ein Mangel an Elektronen erzeugt, im n-Bereich durch Einbringen von fünfwertigen Elementen ein Überschuß an Elektronen. Es bildet sich ein Gleichgewichtszustand mit unterschiedlichen Elektronenkonzentrationen. Der Ladungstransport wird größtenteils von den Majoritätsträgern bestimmt, d.h. im p-Bereich sind
die Defektelektronen oder Löcher verschiebbar, während im n-Bereich Elektronen für den Stromfluß sorgen.
Der Anschluß am p-Bereich heißt Anode, der Anschluß am n-Bereich heißt Kathode. Legt man eine positive Spannung UAK an, so wird der p-Bereich mit Löchern angereichert, während der n-Bereich mit Elektronen
„überschwemmt” wird. An der Grenzschicht rekombinieren die Löcher und die Elektronen unter Energieabgabe.
D.h. Elektronen aus dem n-Bereich und Löcher aus dem p-Bereich „verschwinden” — es fließt Strom. Der Durchlaßstrom darf einen bestimmten Maximalwert I max nicht überschreiten, da die Diode sonst thermisch zerstört
wird.
Legt man eine negative Spannung UAK an, so werden im p-Bereich Löcher „abgesaugt”, während im n-Bereich
die Elektronen „abgesaugt” werden. Am pn-Übergang bildet sich ein Mangel an Löchern und Elektronen (Verarmungszone). Es können keine Löcher und Elektronen rekombinieren. Der Stromfluß ist behindert, die Diode
sperrt.
Vergrößert man die angelegte Spannung, so kommt es zum Sperr-Durchbruch der Diode. Hierfür sind zwei physikalische Effekte verantwortlich.
• Lawinen-Effekt: Bei Sperrbetrieb der Diode erhöht sich die Feldstärke. Diese hohe Feldstärke kann die wenigen Minoritätsträger, die den Sperrstrom bilden, so stark beschleunigen, dass diese beim Stoß gegen die
Gitteratome in der Lage sind, weitere Elektronen aus Bindungen zu befreien. Diese nun beweglichen Leitungselektronen werden ihrerseits beschleunigt und können weitere Bindungselektronen aus dem Valenzin das Leitungsband befördern. Der steile Sperrstromanstieg (Abbildung 48) kann also durch den Lawineneffekt erklärt werden.
• Zener-Effekt1 : Bei starker Dotierung des pn-Übergangs wird die Sperrschicht extrem dünn. Bereits beim
Anlegen einer kleinen Sperrspannung von ca. 4 V können Bindungselektronen direkt aus dem Valenzband
des p-Leiters in das Leitungsband des n-Leiters befördert werden und dort Stromleitung bewirken. Dieser
Mechanismus wird als Zener-Effekt bezeichnet.
1
Conrad Zener hat den Durchbruch von Dioden 1934 entdeckt.
38
Die maximale Sperrspannung kann je nach Bauart zwischen 10 V und 10 kV liegen.
I
Imax
UZ
ID
UD UAK
Abb. 48: Diodenkennlinie
Eine typische Diodenkennlinie zeigt Abb. 48. Ist UAK > U D , so leitet die Diode. Die Durchlaßspannung U D ist eine
materialabhängige Konstante, die bei Si-Dioden etwa 0.7 V beträgt. Im Bereich U Z < UAK < 0V sperrt die Diode,
während sie für Spannungen UAK < U Z wieder leitet.
3.2.2. Diodenmodelle
Zur Berechnung von Schaltungen mit Dioden existieren verschiedene Diodenmodelle:
3.2.2.1. Ideale Diode
I
U
Abb. 49: Schaltbild
I
gesperrt
leitend
U
Abb. 50: Kennlinie
39
I = 0 f ür U < 0
U = 0 f ür I ≥ 0
S t romg l eichrichter
3.2.2.2. Technisch ideale Diode
I
UK
U
Abb. 51: Kennlinie
UK bezeichnet die sogenannte Knickspannung. Für U > UK ist der Strom beliebig groß. Die Knickspannung wird
für Si-Dioden mit 0,7 V angenommen.
3.2.2.3. Physikalisch ideale Diode
Abb. 52: Kennlinie
U
I = I S · (e UT − 1)
(3.1)
40
I S : Sperrstrom
UT =
k·T
(3.2)
q
U T = 25mV bei Zimmertemperatur (Temperaturspannung)
k: Boltzmannkonstante
T: absolute Temperatur
q = e: Elementarladung
Ein Beispiel zur Berechnung einer Schaltung mit einer physikalischen Diode wird bei den Operationsverstärkern
besprochen.
3.2.2.4. Reale Diode
Abb. 53: Kennlinie
3.2.3. Übungsaufgaben
Aufgabe 3.1:
Gegeben sei folgender Spannungsteiler:
R
Ue
R
R
D
Ua
Abb. 54: Spannungsteiler
Die Diode ist eine technisch ideale Diode und hat die Knickspannung UK = 0, 7 V .
a) Skizzieren sie die Kennlinie dieser technisch idealen Diode ( Achsenbeschriftung!) und kennzeichnen sie
die Knickspannung.
41
b) Ue hat folgenden Verlauf:
Ue
1,4 V
t1
t2
t
Abb. 55
Berechnen und skizzieren sie die Ausgangsspannung Ua
Aufgabe 3.2:
U 1 = 10V
R1 = 10 kOhm
D2
ID2
ID1
UD1
D1
UD2
R 2 = 5kOhm
U 2 = −15V
Abb. 56
Berechnen Sie die Spannung U D1 und U D2 , sowie den Strom I D1 und I D2 .
Gehen Sie bei der Berechnung davon aus, dass D1 und D2
a) als ideale Diode modelliert werden
b) als technisch ideale Diode mit der Knickspannung UK = 0, 75V modelliert sind
3.3. Bipolar-Transistoren
3.3.1. Funktionsweise eines Bipolar-Transistors
Ein Bipolar-Transistor ist ein Halbleiterbauelement, das zum Verstärken oder Schalten eines Signals eingesetzt
werden kann. Kennzeichnend für Bipolar-Transistoren ist, dass ihr Leitungsverhalten sowohl durch Elektronenals auch durch Löcherstrom geprägt wird. Im Gegensatz dazu bezeichnet man MOS-Feldeffektransistoren, deren
Wirkungsweise primär nur von einer Sorte von Ladungsträgern, den sogenannten Majoritätsträgern abhängt, als
unipolare Transistoren. Zur Beschreibung des Bipolar-Transistors lassen sich verschiedene Modelle heranziehen.
Physikalisch besteht der Transistor aus einer Anordnung von Halbleiterschichten wechselnder Dotierung (siehe
Abb. 57). Aus den beiden möglichen Anordnungen ergibt sich die Einteilung in die Typen npn und pnp. Im Prinzip
ist der Transistor ein symmetrisches Bauelement, wie Abbildung 58 zeigt. Die Pfeile in Abbildung 58 zeigen den
pn-Übergang an. In der technischen Realisierung beeinflußt man jedoch die Kenndaten und das Verhalten eines
Transistors durch unterschiedliche Dotierung und Dimensionierung der Diodenstrecken, so dass der Transistor
42
zwar immer noch in beiden Richtung betrieben werden kann, aber von den Betriebsdaten her für eine bestimmte
Betriebsrichtung vorgesehen ist.
K B
K B
E
N
P
E
P
N
P
N
PNP-Transistor
NPN-Transistor
Abb. 57: npn/pnp-Transistor (Schnitt)
C
C
B
B
E
E
npn
pnp
Abb. 58: Schaltsymbole
Im Folgenden soll der npn-Transistor betrachtet werden.
Betrachtet man das Verhalten des Transistors in einer Schaltung, empfiehlt es sich, das Ersatzschaltbild von
Ebers-Moll zu verwenden. Wie die Diode kann sich der Transistor in verschiedenen Zuständen befinden, für die
jeweils bestimmte Ersatzschaltbilder gültig sind.
C
B
C
B
E
(1)
C
B
E
(2)
C
B
E
(3)
E
(4)
Abb. 59: Die vier Ersatzschaltbilder
Den Schaltbildern aus Abb. 59 liegen die folgenden Zustände zugrunde:
1. Gesperrt: Es fließt kein Strom durch den Transistor.
2. Aktiv normal: Es fließt ein Strom I C vom Kollektor zum Emitter; die Größe dieses Stromes hängt dabei
vom Strom I B ab. Es gilt: I C = I B · Bn , Bn ∈ [9; 300].
3. Gesättigt: Die Strecke Kollektor Emitter verhält sich in etwa wie ein normaler Leiter.
4. Aktiv invers: Der Transistor befindet sich im umgekehrten Betrieb. Es fließt Strom vom Emitter zum
Kollektor. Dabei gilt: I E = I B · Bi , Bi ∈ [2; 9].
Der Transistor wird in der Schaltungstechnik zum Schalten und Verstärken von Signalen benutzt. Einer der drei
Anschlüsse wird dabei sowohl der Eingangs- als auch der Ausgangsseite zugeordnet. Je nachdem, welcher der
drei Anschlüsse des Transistors dabei auf festem Potential (Masse oder +UB ) liegt, unterscheidet man die drei
Grundschaltungen des Transistors. Diese Grundschaltungen sind die Basis-, Kollektor- und Emitterschaltung.
43
Abbildung 60 zeigt die Grundschaltungen eines npn-Transistors. Alle drei Schaltungen können zur Schaltung
und Verstärkung von Signalen verwendet werden. Da sie jedoch recht unterschiedliche statische und dynamische
Eigenschaften besitzen, sind sie nicht als gleichwertig zu betrachten. Vielmehr hat jede der drei Schaltungen
bestimmte Vor- und Nachteile, die sie für ganz spezielle Anwendungsbereiche geeignet macht.
Abb. 60: Die Grundschaltungen eines npn-Transistors
Die Basisschaltung wird im Niederfrequenzbereich wenig verwendet, besitzt allerdings im Hochfrequenzbereich,
vor allem wegen des geringen Eingangswiderstandes, Vorteile gegenüber der Emitterschaltung.
Bei der Kollektorschaltung, auch Emitterfolger genannt, liegt der Kollektoranschluß auf festem Potential. Wie bei
der Emitterschaltung (s.u.) wird der Basisstrom der Eingangsseite und der Kollektorstrom (bzw. Emitterstrom)
der Ausgangsseite zugeordnet. Die Grundschaltung besitzt aufgrund der anderen Beschaltung und der veränderten Lage des Arbeitswiderstands geringere Verstärkungseigenschaften als die Emitterschaltung und wird zu sehr
speziellen Anwendungszwecken eingesetzt, z. B. als Impedanzwandler.
Anhand der Emittergrundschaltung wird in der Versuchsdurchführung die Eingangs- und Ausgangskennlinie
eines Transistors gemessen.
Folgende Tabelle stellt die Eigenschaften der Grundschaltung gegenüber.
Schaltung
Eingangswiderstand
Ausgangswiderstand
Spannungsverstärkung
Gleichstromverstärkung
Phasenverschiebung
Temperaturabhängigkeit
Anwendungen
Emitter
100 Ω ... 10 kΩ
1 kΩ ... 10 kΩ
20 ... 100 fach
10 ... 50 fach
180
groß
NF- und HF-Verstärker
Leistungsverstärker, Schalter
Basis
10 Ω ... 100 Ω
10 kΩ ... 100 kΩ
100 ... 1000 fach
<1
0
klein
HF-Verstärker
Kollektor
10 kΩ ... 100 kΩ
10 Ω ... 100 Ω
1
10 ... 4000 fach
0
klein
Anpassungsstufen
Impedanzwandler
3.3.2. Eingangskennlinien
Unter der Eingangskennlinie eines Transistors versteht man die Funktion I B (UBE ). Der typische Verlauf ist in Abb.
61 dargestellt. Die Eingangskennlinie hat den Verlauf einer Diodenkennlinie, denn sie beschreibt das Verhalten
der Basis-Emitter-Diode. Bei den betrachteten Transistoren BC546/547 ist der Eingangsstrom I B im µA-Bereich.
Bei einer Stromverstärkung2 von 180 kann ein I C von 100 mA auftreten.
2
Das Datenblatt zum BC546 befindet sich im Anhang.
44
Abb. 61: Beispiel einer Transistor-Eingangskennlinie
3.3.3. Ausgangskennlinien
Die Ausgangskennlinie des Transistors hat im Gegensatz zu den bisher beschriebenen Kennlinien drei Parameter:
I C , UBE und UC E . Erhöht man die Steuerspannung UBE , so wird I C ansteigen, ebenso wenn man UC E erhöht. Zur
Darstellung der Ausgangskennlinie (Abbildung 62) ergibt sich eine Schar von Kennlinien I C (UC E ), wobei UBE der
Scharparameter ist.
Abb. 62: Transistor-Ausgangskennlinie
Zusammenfassend kann man folgende Eigenschaften des Bipolar-Transistors festhalten.
• Der Bipolartransistor ist ein stromverstärkendes Bauelement.
• Die statische Stromverstärkung B (auch BN ) ist als Quotient aus dem Kollektorstrom I C und dem Basisstrom
I
I B definiert: B = IC . Im Arbeitsbereich ist die Stromverstärkung (idealisierend) eine Konstante.
B
• Spannungsverstärkung kann dadurch erreicht werden, dass man auf der Eingangsseite einen Eingangswiderstand (R B ) einbringt, welcher die Eingangsspannung in einen proportionalen Eingangsstrom wandelt,
der wiederum durch die Transistorschaltung verstärkt wird. Auf der Ausgangsseite wandelt man diesen
Strom mittels eines Arbeitswiderstands (R C ) entsprechend in eine Ausgangsspannung zurück.
45
3.3.4. Übungsaufgaben
Aufgabe 3.3:
a) Welche Ladungsträger sind beim Bipolartransistor für den Stromfluß verantwortlich?
b) Nennen sie die vier Betriebsbereiche, in denen sich ein Bipolartransistor befinden kann.
Gegeben ist die Transistorschaltung aus Abbildung 63:
U CC
RC
IC
RB
IB
UEIN
UAUS
IE
Abb. 63
c) Um welchen Transistortyp handelt es sich?
d) Wie groß ist die Spannung UAUS , wenn U E I N = 0V beträgt?
e) R B besitzt einen Widerstand von 10 kΩ. R C besitzt einen Widerstand von 1 kΩ. Die Eingangsspannung U E I N
beträgt 2V. Die Knickspannung U D der technisch idealen Dioden ist 1V. Berechnen sie den Basisstrom I B .
Nehmen sie an, der Transistor besitzt eine Stromverstärkung von BN = 100. Berechnen sie I C .
Aufgabe 3.4:
Gegeben ist folgende Transistorschaltung:
U=5V
RC
RB
IC
IB
U CE
UBE
Abb. 64
46
Abb. 65: Eingangs- und Ausganskennlinien
Man dimensioniere R C und R B so, dass sich UBE = 0, 7V einstellt und die Aussgangsspannung UC E = 2, 5V .
3.4. Übersicht der Schaltkreisfamilien
Logischer Verknüpfungen wie AND und OR können mittels mechanischer Schalter realisiert werden. Selbst NOT
kann noch mit einem Schalter und einem Widerstand realisiert werden.
Da mechanische Schalter (z. B. Relais) nur eine sehr begrenzte Lebensdauer haben und zudem relativ lange Umschaltzeiten haben und Röhren durch den hohen Stromverbrauch keine hohe Integrationsdichte zulassen und eine
sehr beschränkte Lebensdauer haben, sind Halbleiterbauelemente wie Dioden und Transistoren bei der Realisierung schneller logischer Verknüpfungen die erste Wahl. Im Folgenden werden die schaltungstechnischen Realisierungen anhand von Grundfunktionen erläutert. Zu jeder Schaltkreisfamilie wird der typische Leistungsverbrauch
und die Gatterlaufzeit angegeben.
3.4.1. Schaltungstechnische Realisierung mit Bipolar-Transistoren
Ein einfacher Inverter in Emittergrundschaltung ist bereits im zweiten Versuch untersucht worden. Abbildung
66 zeigt eine Widerstands-Transistor-Logik (RTL3 ) Realisierung eines NOR Gatters. Die relativ niederohmigen
Basis-Vorwiderstände stellen sicher, dass die Transistoren auch bei kleiner Stromverstärkung voll leitend werden.
Daraus folgt jedoch eine niedrigere Ausgangsbelastbarkeit. In dieser Beziehung sind die folgenden Schaltungen
wesentlich besser. RTL-Schaltungen werden heute nicht mehr eingesetzt.
Abb. 66: RTL-NOR Gatter
3
Resistor-Transistor-Logic
47
Verlustleistung
Gatterlaufzeit
PV = 5 mW
t pd = 25 ns
In Abbildung 67 ist ein NAND-Gatter in Dioden-Transistor-Logik (DTL) dargestellt. DTL-Schaltungen werden
wegen der durch die Sättigung der Transistoren bedingten großen Gatterlaufzeiten nicht mehr eingesetzt.
Abb. 67: DTL-NAND Gatter
Verlustleistung
Gatterlaufzeit
PV = 15 mW
t pd = 25 ns
Für Anwendungen in Geräten, in denen hohe Störimpulse auftreten, gibt es modifizierte DTL-Schaltungen, bei
denen eine Zener-Diode wie in Abbildung 68 eingesetzt wird. Zur Erhöhung der Ausgangsbelastbarkeit besitzen LSL-Schaltungen eine Gegentaktendstufe. Die Schaltzeit wird durch den Einsatz langsamer Transistoren
künstlich erhöht.
Abb. 68: LSL-NAND Gatter
Verlustleistung
Gatterlaufzeit
PV = 180 mW
t pd = 175 ns
Abbildung 69 zeigt ein Transistor-Transistor-Logik (TTL) NAND-Gatter. TTL-Gatter arbeiten im Prinzip genauso
wie DTL-Gatter. Unterschiede bestehen lediglich in der Ausführung des Dioden-Gatters und des Verstärkers.
48
Abb. 69: TTL-NAND Gatter
Verlustleistung
Gatterlaufzeit
PV = 10 mW
t pd = 10 ns
Bei dem TTL-Gatter in Abbildung 69 ist das Dioden-Gatter (Abbildung 67) durch den Transistor T1 mit mehreren
Emitter-Eingängen ersetzt. Offene Eingänge werden als logisch HIGH angesehen. Der Verstärker besteht bei
TTL-Schaltungen aus einem Ansteuer-Transistor T2 und z. B. Totem-Pole-Schaltung.
Die Ausgangsstufen von TTL-Schaltkreisen können in drei verschiedenen Varianten realisiert sein:
1. Totem-Pole-Ausgang
Er besitzt sowohl gegen Versorgungsspannung, als auch gegen Masse einen Schalttransistor. Dies bewirkt,
dass der Ausgangswiderstand für beide Logikpegel sehr gering ist. Genau einer der beiden Transistoren ist
jeweils leitend. Das Verbinden von Ausgängen ist streng verboten.
2. Tri-State-Ausgang
Er besitzt ebenso wie der Totem-Pole-Ausgang zwei Schalttransistoren, die genauso arbeiten. Es ist jedoch
möglich, durch ein von außen angelegtes Signal, beide Transistoren in den gesperrten Zustand zu bringen.
Der Ausgang des Schaltkreises erhält dadurch keinen logischen Pegel, sondern wird hochohmig. So ist es
möglich, mehrere Ausgänge miteinander zu verbinden, wenn sichergestellt ist, dass höchstens einer der
Ausgänge zur gleichen Zeit nicht hochohmig ist.
3. Open-Collector-Ausgang
Er besteht aus einer Emitter-Grundschaltung. Der Kollektor ist direkt herausgeführt und intern nicht verschaltet. Das bedeutet, dass der Ausgang selbst nur in der Lage ist, eine niederohmige Verbindung mit
Masse herzustellen. Um einen High-Pegel zu erreichen, muß der Ausgang über einen entsprechend dimensionierten Widerstand („pull-up Widerstand“) mit der Versorgungsspannung verbunden werden. Das
erlaubt ebenfalls das Verbinden von mehreren Ausgängen, die sogar gleichzeitig aktiv sein dürfen.
49
3.5. Übungsaufgaben
Gegeben sei folgende Schaltung:
U
R2
RC
Q1
R1
RE
Abb. 70
Bestimmen sie I C und UC E der Schaltung. Die Widerstände haben folgende Werte:
• R 1 = 18 kΩ
• R 2 = 36 kΩ
• R C = 22 kΩ
• R E = 16 kΩ
Bei der Basis-Emitter-Diode handelt es sich um eine technisch ideale Diode mit einer Knickspannung von 0,7
V. Die Spannung U beträgt 12 V. Die Stromverstärkung β F = 75. Hinweis: Sie können annehmen, dass sich der
Transistor Q 1 im aktiv normalen Betrieb befindet.
Lösung:
RC
Req
2
IB
U=12V
Ueq
RE
1
Abb. 71
Ueq = U ·
R eq =
R1
R1 + R2
R1 · R2
R1 + R2
= 4V
= 12 kΩ
Masche 1:
50
Ueq
=
4V
=
mi t UBE = 0, 7V, β F
=
4V
=
IB
=
IB
=
R eq · I B + UBE + R E · I E
12kΩ · I B + UBE + 16kΩ · I E
75 und I E = (β F + 1) · I B f ol g t
12kΩ · I B + 0, 7V + 16kΩ · (75 + 1)
4V − 0, 7V
1, 21 · 106 Ω
2, 73µA
I C = β F · I B = 205 µA
I E = 208 µA
Masche 2:
UC E
=
U − RC · IC − R E · I E
=
4, 162 V
o bi g e Wer te eing esetz t :
UC E
51
Kapitel 4
Der Operationsverstärker in der
analogen Anwendung
Dieses Kapitel enthält eine Einführung über Operationsverstärker. Es wird zunächst die allgemeine Funktionsweise erläutert. Danach werden die verschiedenen Einsatzmöglichkeiten eines Operationsverstärkers vorgestellt.
4.1. Funktionsweise eines Operationsverstärkers
Ein Operationsverstärker unterscheidet sich im Grunde nicht von einem Verstärker mit Bipolar-Transistoren.
Wie an den Kennlinienfeldern der Transistoren zu erkennen, sind Transistoren keine idealen Verstärker, da sie
nur näherungsweise eine proportionale Verstärkung des Eingangssignals ermöglichen. Wie Abbildung 84 zeigt,
besteht ein Operationsverstärker aus vielen Transistoren. Die Nachteile, die ein einzelner Transistor hat, werden
durch geschickte Verschaltung mehrerer Transistoren vermindert.
52
Representative Circuit Diagram
(One–Fourth of Circuit Shown)
Output
Bias Circuitry
Common to Four
Amplifiers
VCC
Q15
Q16
Q22
Q14
Q13
40 k
Q19
5.0 pF
Q12
Q24
25
Q23
+
Q20
Q18
Inputs
Q11
Q9
–
Q21
Q17
Q6
Q2
Q25
Q7
Q5
Q1
Q8
Q3
Q4
2.4 k
Q10
Q26
2.0 k
VEE/Gnd
Abb. 72: Schaltbild des Operationsverstärkers LM324
Operationsverstärker besitzen folgende Eigenschaften:
• eine hohe Spannungsverstärkung
• einen hohen Eingangswiderstand
• einen niedrigen Ausgangswiderstand
Solche hochwertigen Verstärker wurden früher in Analogrechnern für mathematische Operationen wie Addition,
(De)Logarithmierung und Integration eingesetzt. Daher stammt die Bezeichnung Operationsverstärker. Ersichtlich eignen sich Analogrechner vor allem zur Lösung von Differentialgleichungen. Sogar nichtlineare Differentialgleichungen, die in den seltensten Fällen analytisch gelöst werden können, sind mit Analogrechnern zu berechnen.
Heute sind sie in großer Vielfalt als integrierte Schaltungen (ICs) erhältlich und unterscheiden sich in Größe
und Preis kaum von Einzeltransistoren. Aufgrund ihrer in vieler Hinsicht nahezu idealen Eigenschaften ist ihr
Einsatz viel einfacher als der von Einzeltransistoren. Deshalb hat der Operationsverstärker den Einzeltransistor
aus weiten Teilen der linearen Schaltungstechnik verdrängt.
UD
UP
UN
+
+
U
-
U-
+
+
-
UA
Abb. 73: Schaltsymbol des Operationsverstärkers
Die Eingangsstufe ist hier als Differenzverstärker ausgeführt. Bei niedrigen Frequenzen ist die Ausgangsspannung UA in Phase mit der Eingangsspannungsdifferenz U D = U P − UN .
53
Man bezeichnet den P-Eingang als den nicht-invertierenden Eingang und kennzeichnet ihn im Schaltsymbol mit
einem Plus-Zeichen (Abb. 73). Der N-Eingang ist der Invertierende und wird mit einem Minus-Zeichen gekennzeichnet.
Damit der OP sowohl positive, als auch negative Spannungen U D verstärken kann, wird er mit symmetrischer
Versorgungsspannung (z. B. U + = +12V , U − = −12V ) betrieben. Wird der OP lediglich als Komparator eingesetzt,
kann er auch mit einer asymmetrischen Versorgungsspannung betrieben werden (z. B. U + = +5V , U − = 0V ). In
Prinzip-Schaltbildern werden zur besseren Übersichtlichkeit meist nur die Eingangs- und Ausgangs-Anschlüsse
eingezeichnet.
Die Ausgangsspannung ist im Bereich UA min < UA < UA max näherungsweise linear von U D abhängig. Die Differenzverstärkung A D liegt in der Größenordnung von 104 – 105 . Sie wird auch als offene Verstärkung, d.h. Verstärkung ohne Gegenkopplung („open loop gain“) bezeichnet.
Die Rückkopplung des Ausgangs auf den Eingang führt auf eine Übertragungsfunktion und einen in den Grenzen
der Versorgungsspannung einstellbaren Verstärkungsfaktor A ≤ A D . Die Spannungsdifferenz U D wird durch die
Rückkopplung stets auf ungefähr 0 V gehalten.
Die Aussteuergrenzen UA max und UA min liegen je nach OP bis zu 3 V unter der positiven bzw. negativen Betriebsspannung. Wenn die Bereichsgrenzen erreicht sind, steigt UA bei einer weiteren Vergrößerung von U D nicht weiter
an, d.h. der Verstärker wird übersteuert.
Zum Aufbau eines invertierenden 10:1 Verstärkers (Abb. 74) soll ein idealer Operationsverstärker verwendet werden.
Abb. 74: Grundschaltung zur Spannungsverstärkung
4.2. Der Operationsverstärker als Komparator
Der Operationsverstärker kann auch als Komparator eingesetzt werden. Während am Eingang des Differenzverstärkers ein analoges Signal anliegt, erscheint am Ausgang lediglich eines der zwei Signale UA max , UA min . Der
Komperator wird deshalb z. B. zur Analog-Digital-Wandlung eingesetzt. Abbildung 75 zeigt die Schaltung eines
Komparators.
Abb. 75: Komparatorschaltung
54
4.3. Berechnung einfacher Operationsverstärkerschaltungen
R in
+
Uin
Ua
−
R out
Abb. 76: Operationsverstärker
Ua = A · Uin oder AU =
Ua
Uin
A wird als die Verstärkung im offenen Kreis (Open-loop gain) bezeichnet.
Bei einem idealen Operationsverstärker gilt folgendes:
• R in = ∞
• R0 = 0
• A=∞
Unendliche Verstärkung bedeutet also, das Uin = 0 ist.
Uin =
Ua
A
⇒ lim = 0
A→∞
4.4. Anwendungsbeispiele
4.4.1. Invertierender Verstärker
Ein invertierenden Verstärker wird gebaut, indem der positive Eingang des Operationsverstärkers auf Masse
gezogen wird. Dazu bilden die Widerstände R 1 und R 2 das Rückkopplungsnetzwerk (feedback network) zwischen
dem zu invertierenden Eingangssignal und dem Ausgangssignal.
R2
Is
R1
Us
Uo
Abb. 77: Invertierender Verstärker
55
R2
I2
R1
Is
I−
Uid
Us
Io
Uo
virtuelle Masse
Abb. 78: Invertierender Verstärker
4.4.1.1. Die Spannungsverstärkung
Wir beginnen, indem wir die Spannungsverstärkung bestimmen.
Ue − I 1 · R 1 − I 2 · R 2 − U0
Ue − I 1 · R 1 − I 1 · R 2 − U0
I1 =
R2
R1
=
Ue − U−
0 | I1 = I− + I − 2 ⇒ I1 = I2
0
| Uid = U+ − U− = 0
R1
⇒ U+ = 0 ⇒ U− = 0
Ue
=⇒ I 1 =
−Ue ·
=
R1
− U0 = 0
AU =
U0
Ue
=⇒
AU = −
R2
R1
4.4.2. Der nichtinvertierende Verstärker
Der Operationsverstärker kann auch verwendet werden, einen nichtinvertierenden Verstärker zu konstruieren. Hierzu wird das Eingangssignal an dem positiven Eingang des Operationsverstärkers angelegt und das
Ausgangssignal wird auf den negativen Eingang zurückgeführt.
I+
Us
U
Uo
R2
I−
U1
R1
Abb. 79: Verstärker
56
4.4.2.1. Die Spannungsverstärkung
I− = 0
R1
U1 = U0 ·
U =0
R1 + R2
Us − U = U1
=⇒ Us = U1
R1 + R2
U0 = U1 ·
R1
U0
R1 + R2
=⇒ AU =
=
Us
R1
AU = 1 +
=⇒
R2
R1
Es gilt zu beachten, dass der Verstärkungsfaktor positiv und grösser oder gleich Eins ist.
4.4.3. Unity-Gain Buffer or Voltage Follower (Pufferverstärker)
Us
Uid
Uo
Abb. 80: Pufferverstärker
In Abbildung 80 wird ein Spezialfall des nichtinvertierenden Verstärkers vorgestellt. Dieser wird als Pufferverstärker bezeichnet.
Der Wert von R 1 ist unendlich und der von R 2 ist Null.
Somit berechnet sich für die Spannungsverstärkung:
Us − Uid
=
U0
oder U0
=
Us
⇒ Au
=
1
Der ideale Pufferverstärker bietet einen Verstärkungsfaktor von 1 mit einem unendlich hohen Eingangswiderstand und einem Ausgangswiderstand von Null. Desweiteren bietet er eine enorme Impedanzwerttransformation
unter Beibehaltung der Stärke des Ausgangssignals.
Der ideale Pufferverstärker benötigt kein Eingangsstrom, kann aber jeden beliebigen Verbraucher versorgen, ohne
dass die Ausgangsspannung einbricht. Daher wird der Pufferverstärker in vielen Sensoren gefunden.
57
4.4.4. Addierer
I3
I1
R1
R3
I−
U1
Uo
R2
I2
U2
Abb. 81: Addierer
Zwei Eingangsquellen u1 und u2 sind verbunden mit dem invertierenden Eingang durch die Widerstände R 1 und
R2 .
i1
=
i2
=
i3
=
i_
=
i3
=
u0
=
u1
R1
u2
R2
u0
−
R3
0
i1 + i2
R3
R3
−
· u1 −
· u2
R1
R2
Jede beliebige Anzahl von Einganssignalen kann addiert werden.
4.4.5. Integrierer
Diese Schaltung realisiert einen analogen Integrator, der das Eingangssignal über die Zeit integriert.
is =
us
R
und ic = −C ·
duo
dt
Z
Z
dv0 =
−
1
R·C
· us dτu0 (t) = −
1
R·C
Z
t
i_ = 0 ⇒ i c = is
us (τ)dτ + u0 (0)
0
58
IC
IS
C
U(t)
Us
R
I−
t
Uo
US
Uo
Abb. 82: Integrierer
Aufgabe 4.1:
UD
IR R
Ue
Ua
Abb. 83
Bei der Diode handelt es sich um eine physikalische ideale Diode. Berechnen sie Ua .
59
Kapitel 5
Feldeffekttransistoren und CMOS-Logik
5.1. Der Feldeffekt
Die Idee, mit Hilfe eines Feldeffekts ein elektronisch steuerbares Bauteil zu schaffen, ist schon sehr alt1 . Sie ist
jedoch erst nach dem Aufbau einer hochentwickelten Halbleiter-Technologie durchführbar geworden.
Betrachtet wird die Anordnung aus Abbildung 72, die aus zwei metallischen Streifen mit dünner isolierender
Zwischenlage besteht. Wenn an den beiden metallischen Streifen die als zwei Kondensatorplatten aufzufassen
sind, eine Gleichspannung U anliegt, so werden sich entsprechend der Kapazität C und der Spannung U auf den
Platten gegensätzliche elektrische Ladungsträger mit der Ladung Q = C · U ansammeln. Bei der gezeichneten
Spannungspolarität werden auf dem oberen Streifen Elektronen verdrängt und auf dem untereren Streifen Elektronen angehäuft. Das bedeutet, dass unten die Menge an freien Ladungsträgern vergrößert wird. Im Prinzip
sollte daher der Widerstand des unteren Streifens durch die Größe der Ladung Q und damit auch durch die Spannung U zu steuern sein. Berechnungen ergeben, dass man pro Volt eine zusätzliche Ladungsträgerkonzentration
von etwa 1014 pro Kubikzentimeter erhält. Messungen der Konzentration an freien Ladungsträgern in Metallen
führt auf etwa 1022 · cm−3 . Die Anreicherung an Elektronen in dem Metall ist daher unerheblich. Die Verhältnisse
lassen sich aber ändern, wenn man statt Metallen Stoffe mit weniger freien Ladungsträgern heranzieht. Halbleiter haben etwa Konzentrationen von 1013 · cm−3 . In Halbleitern wird eine Ladungsvermehrung oder Verminderung
zur Realisierung eines veränderbaren Widerstands technisch nutzbar.
1
J.E. Lilienfeld 1925, O. Heil 1934
60
Abb. 84: Prinzip des spannungsgesteuerten Widerstands
5.1.1. Prinzip des MOSFET
Abbildung 85 zeigt das Prinzip eines planaren Feldeffekttransistors (MOSFET2 ).
Abb. 85: Prinzip eines Feldeffekttransistors
Durch die positive Gate-Spannung UGS werden negative Ladungen im Kanal (Bereich zwischen Drain und Source)
induziert. Wird keine Drain-Spannung U DS angelegt, so wird die Verteilung der induzierten negativen Ladung
gleichmäßig über die Kanallänge erfolgen. Ist eine Drain-Spannung U DS vorhanden, so wird ein Strom durch den
Kanal fließen.
Die Ausdehnung der Kanalzone ist in Abbildung 86 verdeutlicht.
2
Metal-Oxide-Semiconductor-Field-Effect-Transistor
61
Abb. 86: Ausdehnung der Kanalzone
In Abbildung 87 ist die Eingangskennlinie I DS = f (UGS ) abgebildet. Bei MOSFETs gibt es neben der Unterscheidung in n-Kanal und p-Kanal noch eine Differenzierung in Anreicherungstyp und Verarmungstyp. Wegen des
positiven Vorzeichens der anfänglichen Ladungsträger im Kanalbereich ist der Transistor für Steuerspannungen UGS bis zur Größe U T H 3 gesperrt. Will man ihn leitend machen, muß man den Kanalbereich mit negativen
Ladungstypen anreichern, weshalb man diesen Typ Anreicherungstyp nennt. Verwendet man im Kanalbereich negative Ladungsträger (technologisch durch Ionenimplantation erzeugt), so kann U T H auch negativ werden. Dann
ist ein Transistor entstanden, der im Ruhezustand Strom leitet. Man kann diesen Transistor mit einer negativen
Gatespannung sperren bzw. dadurch eine Verarmung an Ladungsträgern erzwingen, weshalb dieser Typ auch
Verarmungstyp genannt wird.
Abb. 87: Eingangskennlinie
Das Ausgangskennlinienfeld eines MOSFETs ist in Abbildung 88 dargestellt.
3
Die Bezeichnung TH steht für Threshold.
62
Abb. 88: Kennlinienfeld
Bei MOSFETs wird zwischen drei Betriebsbereichen unterschieden.
Diese Betriebsbereiche sind für einen n-Kanal MOSFET in folgender Tabelle zusammengestellt. Die Bezeichnung
der Betriebsbereiche sind die in der Literatur gebräuchlichen.
Betriebsbereich
Sperrbereich (Cutoff)
Anlaufbereich
(Widerstandsbereich, Nonsaturation)
Abschnürbereich (Saturation)
UGS - U DS
I DS =
0
KN ((UGS − U T H ) · U DS −
KN
2
· (UGS − U T H )2
UGS < U T H
2
U DS
2
)
UGS > U T H
UGS − U T H ≥ U DS
UGS > U T H
UGS − U T H ≤ U DS
Erläuterungen:
• U T H bezeichnet die Threshold-Spannung
µ·ǫ
• KN = t · WL
ox
W und L beschreiben die Geometrie des Kanals. t ox bezeichnet die Oxiddicke.
Insgesamt unterscheidet man sechs verschiedene Typen von Feldeffekttransistoren. Die Schaltsymbole und die
entsprechenden Kennlinien, sowie Anwendungsgebiete sind in Abbildung 89 zusammengefaßt. Während beim
MOSFET das Gate durch eine Oxid-Schicht (SiO2 ) vom Kanal isoliert ist, wird beim Sperrschicht-FET ein PNÜbergang eingesetzt.
63
Abb. 89: Übersicht gebräuchlicher Feldeffekttransistoren
5.1.2. Beispiele
Aufgabe 5.1:
Gegeben ist die Schaltung in Abbildung 90 mit folgenden Größen: U = 10V , R 1 = R 2 = R = 10kΩ
R1
R
U
R
R2
U2
UGS
Abb. 90
a) Berechnen sie die Gatespannung UGS .
b) Bestimmen sie den Drainstrom I D aus der Übertragungskennlinie (Abbilung 91
64
Abb. 91: Kennlinie
c) Berechnen sie U2 zuerst allgemein (U2 = f (U, I D , R 1 , R 2 )) und dann durch einsetzen der gegebenen Werte.
Aufgabe 5.2:
Gegeben sei nebenstehende Schaltung mit den folgenden Größen:
RD
R1
UDD
U0
R2
RS
Abb. 92
U DD
=
15V
R1
=
150kΩ
R2
=
100kΩ
RD
=
40kΩ
RS
=
5kΩ
65
Abb. 93: Übertragungskennlinie
a) Berechnen sie für den Spannungteiler am Gate des Transistors die notwendigen Größen einer Ersatzspannungsquelle
b) Bestimmen sie den Drainstrom I D im Arbeitspunkt aus der Übertragungskennlinie.
c) Berechnen sie die Größen U DS und U0 aus den Maschengleichungen.
5.1.3. Grundschaltungen mit Feldeffekttransistoren
In Analogie zu den Bipolar-Transistoren unterscheidet man Source-, Drain- und Gateschaltung, je nachdem, welcher Anschluß auf konstantem Potential liegt.
Im Folgenden wird die Sourceschaltung aus Abbildung 94 betrachtet. Der MOSFET ist ein n-KanalAnreicherungstyp.
Abb. 94: Inverter mit einem Widerstand
Die Sourceschaltung entspricht der Emitterschaltung bei Bipolar-Transistoren. Der Unterschied besteht darin,
dass der Eingangswiderstand sehr hoch ist und damit der Gatestrom I GS vernachlässigbar klein ist.
Für die Schaltung aus Abbildung 94 sind folgende Werte gegeben:
• U T H = 1 V ol t
• KN = 25 µA/V 2
• U x = 3 V ol t
• E = 10 V ol t
• R L = 100 kΩ
66
Aufgabe 5.3:
Berechnen Sie den Strom I DS und die Spannung U DS bzw. U y . In welchem Betriebsbereich befindet sich der Transistor? Die Schaltung realisiert einen Inverter. Welchen Vorteil hat die Schaltung gegenüber einem Inverter mit
einem Bipolar-Transistor?
Durch die Isolierung des Gates ist der Eingangsstrom sehr gering. Man spricht bei MOSFETs auch von spannungsgesteuerten Stromquellen.
Nachtrag: In der Netzwerktheorie gibt es verschiedene sogenannte abhängige Quellen. Während ein Bipolartransitor als eine stromgesteuerte Stromquelle aufgefasst werden kann, so kann der MOSFET als spannungsgesteuerte
Stromquelle angesehen werden. Man sollte sich klar machen, dass es sich dabei wieder um ein Modell handelt.
In der Praxis ist der Gatestrom 6= 0 (z.B µA-Bereich)
Nun zu diesem grundsätzlichen Problem der betrachteten Inverterschaltungen. Sowohl die Schaltung mit dem
Bipolartransitor als auch die Schaltung mit dem FET haben beide bei einem Pegel “logisch high” einen leitenden
Pfad zwischen der Versorgungsspannung und der Masse. (Stromfluß) Bei “logisch low” hingegen fließt kein Strom.
Der Stromfluß bei “logisch high” verursacht einen “Leistungsverbrauch” (Umsatz) in dem Widerstand R L . Um
diesen sogenannten statischen Leistungsverbrauch zu minimieren wurde die CMOS-Logik entwickelt.
5.2. CMOS-Technik
5.2.1. Schaltungstechnische Realisierung mit FETs
Eine Logikfamilie, die sich durch besonders niedrige Leistungsaufnahme auszeichnet, ist die CMOS-Logik4 .
CMOS-Logik hat in der praktischen Anwendung Logikgatter mit Bipolar-Transistoren weitgehend verdrängt. Die
Schaltung eines Inverters ist in Abbildung 95 dargestellt.
UV
PMOS
NMOS
GND
Abb. 95: CMOS-Inverter
Verlustleistung (Standard)
Verlustleistung (High Speed)
Gatterlaufzeit (Standard)
Gatterlaufzeit (High Speed)
PV = 0, 3 µW /kHz
PV = 0, 5 µW /kHz
t pd = 90 ns
t pd = 10 ns
Die CMOS-Technologie benutzt als aktive Elemente Paare von NMOS- und PMOS-Transistoren. Diese werden
so geschaltet, dass beide Gate-Anschlüsse vom gleichen Signal angesteuert werden, wodurch immer genau einer
leitet und der andere sperrt.
In der Schaltung werden selbstsperrende FETs verwendet. Die Source-Elektrode des n-Kanal-FETs ist an Masse,
die des p-Kanal-FETs an die Betriebsspannung angeschlossen. Beide FETs arbeiten also in Source-Schaltung.
Dabei stellt jeweils der eine Transistor den Arbeitswiderstand für den anderen dar.
4
Complementary-Metal-Oxide-Semiconductor
67
Ist die Eingangsspannung U E = 0 V ol t , leitet der p-Kanal FET und der n-Kanal FET sperrt. Für U E = UV sperrt
der p-Kanal FET und der n-Kanal FET leitet.
Die Übertragungskennlinie, also die Kennlinie, die die Ausgangsspannung über der Eingangsspannung darstellt,
ist in Abbildung 96 dargestellt. Die gestrichelte Kurve gibt die Stromaufnahme an.
Abb. 96: Übertragungskennlinie eines CMOS-Gatters
Die Stromaufnahme eines CMOS-Gatters setzt sich aus drei Anteilen zusammen:
• Wenn die Eingangsspannung konstant gleich Null oder gleich UV ist, fließt ein kleiner Sperrstrom im Bereich von wenigen Mikroamperé.
• Wenn das Eingangssignal seinen Zustand wechselt, fließt vorübergehend ein Querstrom durch beide Transistoren.
• Der überwiegende Beitrag entsteht bei der Auf- und Entladung der Transistorkapazitäten.
Die Verlustleistung eines CMOS-Gatter ist PV = C T · U D2 · f . Dabei ist f die Transitionshäufigkeit.
5.2.2. Im Detail
VDD=5
VDD=5
MP
MP
"Off"
V1 =5
VOL =5
"On"
V1 = 0
VOH = 5
"0"
"1"
C
C
MN
"On"
MN "Off"
Abb. 97: CMOS Inverter in seinen zwei verschiedenen Zuständen
68
UGS
S
G
D
UDD =5V
D
U EIN
G
UGS
S
Abb. 98
Abb. 99
Aus dem Kennlinienfeld kann man den Wert bzw. das Vorzeichen der Threshold-Spannung entnehmen. (In der
Grafik U P ) Für den n-Kanal-Transistor ergibt sich: U P (bzw.U T HN ) = +0, 75V . Der Betrag von 0,75V ist willkürlich angegeben. Wichtig ist das Vorzeichen.
Für den p-Kanal-Transistor ergibt sich: U P (bzw.U T H P ) = −0, 75V . Der p-Kanal-Transistor besitzt also eine negative Threshold-Spannung.
Warum der p-Kanal-Transistor bei einer Eingangsspannung U E I N = 0V leitet, kann man sich anhand des Maschenumlaufs überlegen.
U E I N − U DD − UGS = 0
U E I N = 0V
UGS = −U DD
!
U DD = 5V
UGS = −5V
(s. Kennl inie)
Für den Fall, dass U E I N = 5V ist, ergibt sich:
UGS = U E I N − U DD = 0
UGS = 5V − 5V
UGS = 0V
69
Damit sperrt der p-Kanal-Transistor.
Welche Betriebsbereiche werden durchlaufen? Folgende Abbildungen geben darüber Auskunft.
Abb. 100: Charakteristik der Spannungsübertragung eines symmetrischen CMOS-Inverters
Region
1
2
3
4
5
Eingangsspannung ui
ui ≤ VT N
U T N < ui ≤ uo + U T P
U
ui = DD
2
uo + UT N < uI ≤ (UDD + UT P )
ui ≥ (UDD + U T P )
Ausgangsspannung uo
UOH = UDD
high
U DD
2
low
UOL = 0
NMOS Transistor
gesperrt
gesättigt
gesättigt
linear
linear
PMOS Transistor
linear
linear
gesättigt
gesättigt
gesperrt
Aufgabe 5.4: Beispiel: CMOS-Logik
Entwickeln sie ein CMOS-Logikgatter, dass die Funktion Y = A · (B · C + D · E) implementiert. Alle Literale stehen
in nicht negierter Form zur Verfügung.
70
Kapitel 6
Einführung in die Wechselstromlehre
Wechselgrößen
• Unter Wechselgrößen versteht man Ströme und Spannungen (sowie abgeleitete Größen), deren augenblickliche oder momentane Werte u(t), i(t) sich in Betrag und Richtung zeitlich ständig ändern (ständig ändernde
Vorzeichen und damit auch der Richtung). Nach einer bestimmten Zeit wiederholt sich der Verlauf periodisch.
• Periodizität: Wiederholung bestimmter Amplitudenverläufe in konstanten Zeitintervallen T (Periodizitätsdauer T : f (t) = f (t + T ).)
Abbildung 101 zeigt einige typische Formen, etwa die Impulsform und Dreiecksform. Ihnen allen ist gemeinsam.
daß sie in Sinusfunktionen zerlegt werden können.1
Abb. 101: Wechselgrößen
Wechselgrößen schwanken zeitlich. Ihr gemeinsames Merkmal ist, daß ein Mittelwert, gebildet über den Zeitraum
der Periodendauer, verschwindet.
• Sinusförmige Wechselgröße: Unter einer sinusförmigen Wechselgröße versteht man eine Größe (i, u), deren
augenblicklicher Wert periodisch sinus- oder cosinusförmig von der Zeit abhängt.
Man spricht auch von Wechselspannung oder Wechselstrom. Da sich die Sinus- und Cosinus–Funktionen wegen
sin α = cos (α − π2 ) durch eine Phasenverschiebung von π2 unterscheidet, wird in den Begriff „sinusförmig” üblicherweise auch die Cosinus–Funktion einbezogen.
1
Fourieranalyse, s. Literatur
71
Sinusförmige Zeitfunktion
Kann die Zeitabhängigkeit eines Vorgangs x(t) durch eine Sinusfunktion beschrieben werden, deren Argument
eine lineare Funktion der Zeit ist, so heißt die schwingende Größe Sinusgröße.
=
x(t)
=
=
u(t)
x̂ · sin(α + ϕ0 )
x̂ · sin(ωt + ϕ0 )
û · sin(ωt + ϕu )
Dabei ist
• x(t) der Momentan- oder Augenblickswert
• x̂ bzw. û die Amplitude (Scheitel- oder Spitzenwert)
• ω die Kreisfrequenz
• ϕu bzw. ϕ0 der Nullphasenwinkel
Abbildung 102 zeigt die Vor- und Nacheilung zwischen Spannung und Strom
Abb. 102: Sinusgrößen
Wichtige Größen sind die Periodendauer, Frequenz, Kreisfrequenz Die Größe ω heißt Kreisfrequenz. Die Frequenz
f =
1
T
gibt die Anzahl der Perioden pro Zeiteinheit an. Sie ist gleich dem Kehrwert der Periodendauer.
Die Kreisfrequenz w unterscheidet sich nur um den Faktor 2π von f und erlaubt eine einfache Schreibweise der
Zeitfunktion. Sie wird in s−1 angegeben.
Beispiel: Der Netzfrequenz f = 50 Hz entspricht die Periodendauer T =
1
50
s = 20 ms und ω = 2π · 50 s−1 = 314 s−1 .
Verhalten der Grundelemente bei Sinusgrößen im Zeitbereich
Für Widerstand, Kondensator und Spule lassen sich folgende Beziehungen angeben.
i=
i=C·
i=
1
L
u
Proportionalität
R
du
dt
Z
Differentialbeziehung
udt
Integralbeziehung
Setzt man in die Beziehungen i = î · sin(ωt + ϕi ) ein und vergleicht die Amplituden und Phasen, so ergibt sich
folgendes.
72
• Widerstand: Am ohmschen Widerstand haben Strom und Spannung gleiche Phasenlage. Die Quotient
ist gleich dem Widerstand R.
û
î
• Kondensator: Der Stromansatz i = îsin(ωt + ϕi ) führt auf
i = îsin(ωt + ϕi ) = C
du
dt
=C
d
dt
(ûsin(ωt + ϕu ))
i = ω C û cos(ωt + ϕu ) = ω C û sin(ωt + ϕu +
Beim Kondensator eilt die Spannung gegenüber dem Strom um
π
ϕu = ϕ i −
2
Für die Amplitudenmaxima ergibt sich
û =
π
2
π
2
)
nach.
î
ωC
• Spule: Entsprechend verfährt man bei der Spule. Die Ergebnisse lauten
π
ϕu = ϕ i +
2
Bei der Spule eilt die Spannung u dem Strom um π2 voraus. Für das Amplitudenmaximum ergibt sich
û = î ω L
Das Verhalten der Grundelemente Kondensator und Spule läßt es sinnvoll erscheinen, die Begriffe Scheinwiderstand und Scheinleitwert einzuführen.
û
Z=
Scheinwiderstand
î
Der Scheinwiderstand hat die Dimension eines Widerstands, aber bei Kondensator und Spule keine physikalische
Bedeutung. Z ist eine Größe, die den Widerstandsbegriff formal einführt. Der Scheinleitwert Y ist der Reziprokwert
des Scheinwiderstandes. Zusammenfassend kann man festhalten.
1
Z=
ωC
Z =ωL
Netzwerkanalyse im Frequenzbereich
Die Analyse linearer Wechselstromnetzwerke führt mit den eben vorgestellten Schritten auf die Lösung einer
Differentialgleichung (DGL). Das Lösen einer solchen DGL läßt sich durch eine Transformation vereinfachen.
Abbildung 103 zeigt die Lösung im sog. Frequenzbereich.
Abb. 103: Netzwerkanalyse
Die Differentialgleichung wird im Frequenzbereich wie eine algebraische Gleichung behandelt.
73
Lösungsmethodik:
1. Transformation des Netzwerkes aus dem Zeit- in den Frequenzbereich.
– Einführung komplexer Ströme und Spannungen
– Ersatz der R,C durch die Widerstands-/Leitwertoperatoren.
2. Lösung der gesuchten Größe/n im Frequenzbereich.
– Knoten- und Maschensatz für komplexe Ströme/Spannungen.
– Alle abgeleiteten Verfahren.
3. Rücktransformation aus dem Frequenzbereich in den Zeitbereich.
a(t) = a0 sin(ωt + ϕ) = I m(a(t)) → a(t) = a0 e j(ωt+ϕ)
a(t) = a0 e j(ωt+ϕ) → a(t) = I m(a(t)) = a0 sin(ωt + ϕ)
Widerstands-/Leitwertoperatoren der Grundelemente
Allgemein : U = Z · i
R:
C:
Zeitbereich
U =R·I
ic
ic
ic
ic
dU
kompl ex : U = Z · i
= C d tc
= C ddt (U0 sin(ωt + ϕ))
= CωU0 cos(ωt + ϕ)
= CωU0 sin(ωt + ϕ + Π2 )
Frequenzbereich(komplex)
U =R·I
⇒ ZR = R
dU
mit Uc = U0 sin(ωt + ϕ)
i c = C d tc
i c = C ddt (U0 e j(ωt+ϕ) )
i c = C jωU0 e j(ωt+ϕ)
i c = C jωU C
1
⇒ Z C = jωC
Die bereits vom Gleichstromnetzwerk her bekannten Spannungs- und Stromteilerregeln gelten sinngemäß auch
im Frequenzbereich in der Operatordarstellung:
U1
U
=
Z1
i1
Z1 + Z2
i
=
Z2
Z1 + Z2
Hinweis: Für eine tiefergehende Betrachtung der Wechselgrößen sei auf die einschlägige Literatur verwiesen.
74
Kapitel 7
Lösungen der Übungsaufgaben
Aufgabe 1.1:
Anzahl der Knoten: 0 Das bedeutet:
I Ges =
I R1
= I R2
I Ges =
U0
R Ges
=
U0
R1 + R2
Widerstände in Serie: Addition der Widerstände ergibt Gesamtwiderstand: R Ges =
UR1 = I R1 · R 1 = U0 ·
UR2 = I R2 · R 2 = U0 ·
Pn
U=1 R U
R1
R1 + R2
R2
R1 + R2
Diese Schaltung nennt man einen Spannungsteiler.
Aufgabe 1.2:
UGes =
UR1
= UR2
UGes =
I 0 · R Ges
= I0 ·
R1 · R2
R1 + R2
Parallelschaltung von Widerständen: Addition der Leitwerte ergibt Gesamtleitwert: GGes =
I1 =
I2 =
UR1
R1
UR2
R2
=
I0 ·
=
I0 ·
=
I0 ·
R1 · R2
·
Pn
U=1 GU
1
R1 + R2 R1
R2
R1 + R2
R1
R1 + R2
75
Herleitung der Parallelschaltung und Reihenschaltung von Widerständen siehe entsprechende Literatur.
Aufgabe 1.3:
a) R 1 ; Kirchhoff (2.Gesetz)
b) Vorgehen: Umzeichen der Schaltung
R2
I3
U3
R4
Uq
R3
R5
Abb. 104
Als nächstes kann die Parallelschaltung aus R 4 und R 3 zusammengefasst werden zu einem Widerstand R 34 .
RL
R 34
Uq
R5
Abb. 105
R2
R4 · R3
R4 + R3
R5
=
3kΩ
=
50 · 106 Ω2
=
7kΩ
15 · 103 Ω
1
= 3 · 103 Ω
3
Reihenschaltung von drei Widerständen:
76
R Ges = R 2 +
R4 · R3
R4 + R3
+ R5
50 · 106 Ω2
=
3000Ω +
=
15 · 103 Ω · 3 · 103 Ω + 50 · 106 Ω2 + 7 · 103 Ω · 15 · 103 Ω
2
6
=
=
I Ges
+ 7000Ω
15 · 103 Ω
45 · 10 Ω + 50 · 10 Ω2 + 105 · 106 Ω2
6
=
15 · 103 Ω
200 · 10 Ω
6
15 · 103 Ω
2
15 · 103 Ω
1
13 · 103 Ω
3
20V
=
13 13
60
=
· 103 Ω
· 10−3
40
V
Ω
= 1, 5 mA
Die Spannung über R 4 und damit über R 3 , nämlich U3 , ist U = 1, 5mA · 3 13 · 103 Ω = 5V .
5V
I3 =
5kΩ
= 1 mA
Alternative Lösung
Diese Aufgabe kann auch über Ersatzstrom- und Ersatzspannungsquellen gelöst werden.
Vorgehen:
– Innenwiderstand bestimmen: Kurzschließen der Spannungsquellen bzw. weglassen der Stromquelle Berechnung des Widerstandswertes.
– Berechnen der Leerlaufspannung / Kurzschlußstrom
– Berechnen des Kurzschlußstrom / Leerlaufspannung
Berechnen von I 3 und U3 mittels Ersatzspannungs- bzw. Ersatzstromquelle
Berechnen des Innenwiderstandes R i :
R
2
R
R
4
R
i
5
Abb. 106: Innenwiderstand
R i = R 4 k (R 2 + R 5 ) =
R4 (R2 +R5 )
R4 +R2 +R5
=
100kΩ2
20kΩ
= 5kΩ
1.) Möglichkeit: Lösung über die Berechnung der Leerlaufspannung U L
77
R
U
q
R
2
R
1
R
U
4
L
=
U
4
5
Abb. 107
UL =
R4
R2 +R4 +R5
IK =
UL
Ri
=
Uq =
10kΩ
20V
20kΩ
R2 +R4 +R5
R4
R4 (R2 +R5 ) R2 +R4 +R5
= 10V
Uq =
Uq
R2 +R5
=
20V
10kΩ
= 2mA
2.) Möglichkeit: Lösung über die Berechnung des Kurzschlußstromes I K
R
U
q
R
2
R
1
R
I
4
k
5
Abb. 108
I K = I 25 =
Uq
R2 +R5
UL = IK Ri =
= 2mA
Uq R4 (R2 +R5 )
R2 +R5 R2 +R4 +R5
=
R4
R2 +R4 +R5
Uq = 10V
Ersatzspannungsquelle
R
U
L
I
i
U
3
R
3
3
Abb. 109: Ersatzspannungsquelle
I3 =
UL
R i +R3
=
10V
10kΩ
= 1mA
U3 = R 3 I 3 = 5kΩ · 1mA = 5V
Ersatzstromquelle
78
I
I
k
R
3
R
i
U
3
3
Abb. 110: Ersatzstromquelle
R
i
I 3 = I K R +R
= 21 I K = 1mA
i
3
U3 = R 3 I 3 = 5kΩ · 1mA = 5V
Aufgabe 1.4:
a) Berechnung des Innenwiderstandes R i durch Kurzschließen der Spannungsquelle und Entfernen der Stromquelle.
R3
R4
Ri
R2
Abb. 111
R i = R 4 ||(R 3 + R 2 ) =
R 4 · (R 2 + R 2 )
R4 + R2 + R2
=
R · ( R2 + R2 )
R+
R
2
+
R
2
=
R2
2R
=
R
2
b) Berechnung von I K ′
79
I’k
R3
I0
R2
R4
I’k
Uges
R1
Abb. 112
Lösung mit Stromteiler:
IK ′ =
R2
R2 + R3
· I0 =
I0
2
Lösung mit Spannungsberechnung:
U3 = I 0 · (R 2 ||R 3 ) = I 0 ·
IK ′
R2 · R3
R2 + R3
U3
R2 · R3
I0
=
=
· I0 =
R3
(R 2 + R 3 ) · R 3
2
c) Berechnung von I K ′′
R3
U0
I’’
k
R4
R2
Abb. 113
I K ′′ =
U0
R2 + R3
=
U0
R
d) Berechnung des Gesamtkurzschlußstromes I K
I K = I K ′ + I K ′′ =
I0
2
+
U0
R
80
Aufgabe 1.5:
a) Ohmsches Gesetz: Der Strom I 1 ist einfach zu berechnen.
I1
R1
R2* R3
R2+ R3
U
Abb. 114
I1 =
U
R1 +
10V
=
R2 ·R3
R2 +R3
5Ω +
200Ω2
30Ω
10V
=
11 23 Ω
=
6
7
A
Aus der Schaltung sieht man, dass U2 = U3 ist.
U2
=
I2
=
I3
=
6
U3 =
U2
R2
U3
R3
7
=
=
A·
R2 · R3
R2 + R3
5 75 V
10Ω
5 75 V
20Ω
=
=
4
7
2
7
=
6
7
A·
200
30
5
Ω=5 V
7
A
A
Zur Kontrolle die Knotengleichung:
I1
6
A
7
=
=
I2 + I3
4
2 p
A+ A
7
7
b) Gleichungssystem mit Kirchhoff/Ohmsches Gesetz
• Knotengleichung: I 1 − I 2 − I 3 = 0
• Maschengleichung:
a) U2 = U3
b) U − U1 − U2 = 0
• Ohmsches Gesetz:
– U1 = R 1 · I 1
– U2 = R 2 · I 2
– U3 = R 3 · I 3
−U2 + U3 = 0
−R 2 · I 2 + R 3 · I 3 = 0
−R 2 · I 1 + R 2 · I 3 + R 3 · I 3 = 0
I2 = I1 − I3 !
−R 2 · I 1 + (R 2 + R 3 ) · I 3 = 0
U1 + U2 = U
R1 · I1 + R2 · I2 = 0
R1 · I1 + R2 · I1 − R2 · I3 = 0
I2 = I1 − I3 !
81
Ein Gleichungssystem für die Ströme I 1 und I 3
−R 2 · I 1 + (R 2 + R 3 ) · I 3
(R 1 + R 2 ) · I 1 − R 2 · I 3
−R 2
(R 1 + R 2 )
(R 2 + R 3 )
−R 2
=
0
=
U
I1
0
·
=
I3
U
Lösung über Determinante:
0
U
(R 2 + R 3 ) −R 2
I1 = −R 2
(R 2 + R 3 )
(R 1 + R 2 )
−R 2
−R 2
0 (R 1 + R 2 ) U I3 = −R 2
(R 2 + R 3 )
(R 1 + R 2 )
−R 2
U · (R 2 + R 3
=
R1 · R2 + R1 · R3 + R2 · R3
U · R2
=
R1 · R2 + R1 · R3 + R2 · R3
I 2 ergibt sich aus: I 2 = I 1 − I 3
c) Ersatzspannungsquelle:
Man kann z. B. mit I 3 anfangen
R1
Ri
A
I3
R2
U
I3
!
R3
UL
R3
B
Abb. 115
R 1 bezüglich den Punkten A und B bestimmen. Spannungsquelle kurzschließen.
Ri =
R1* R2
R1+ R2
Abb. 116
Ri =
R1 · R2
R1 + R2
U L bestimmen:
R1
U
R2
UL
Abb. 117
82
UL =
I3 =
UL
R i + R3
=
R2
·U
R1 +R2
R1 ·R2
+ R3
R1 +R2
=⇒
R2
R1 + R2
·U
U · R2
R1 · R2 + R1 · R3 + R2 · R3
Schaltung zur Berechnung von I 1
Ri
I1
I1
R1
U
!
R1
U
R2
R3
Abb. 118
Ri =
I1 =
UL
R1 + R i
=
U
R1 +
R2 ·R3
R2 +R3
=⇒
R2 · R3
UL = U
R2 + R3
U · (R 2 + R 3 )
R1 · R2 + R1 · R3 + R2 · R3
I 2 entweder über die Knotengleichung berechnen oder genauso wie I 1 und I 3 !
d) Maschenstromverfahren
U1 I1
R1
I2
U
R2
U2
I3
R3
U3
Abb. 119
• Anzahl der Zweige (z): 3
• Anzahl der Knoten (k): 2
• Anzahl der Maschen: 3
• Anzahl der Baumzweige: b = 2 − 1 = 1
• Anzahl der unabhängigen Gleichungen: m = 3 − (2 − 1) = 2
• Aufstellen der Maschengleichungen:
R 1 · I 1 + R 2 · (I 1 − I 3 ) = U
R 3 · I 3 − R 2 · (I 1 − I 3 ) = 0
=⇒
=⇒
(R 1 + R 2 ) · I 1 − R 2 · I 3 = U
−R 2 · I 1 + (R 2 + R 3 ) · I 3 = 0
Für die Berechnung von I 1 und I 3 wurden die Umlaufrichtungen entsprechend der Zählpfeilrichtung
des Verbindungsstroms gewählt.
83
• Gleichungssystem:
(R 1 + R 2 )
−R 2
I1
U
·
=
I3
0
−R 2
(R 2 + R 3 )
Aufgabe 1.6:
a) 4
b) Um ein linearunabhängiges Gleichungssystem zu finden
c)
R + R2 + R4
1
−R 2
−R 4
−R 2
R2 + R3 + R5
−R 5
−R 4
Ia
U1 − U2
−R 5
· I b = U2 − U3
R4 + R5 + R6
Ic
0
d) Sie ist symmetrisch zur Hauptdiagonalen
Aufgabe 1.7:
R 11
=
R1 + R3 + R5 + R6
R 12
=
R2 + R5 + R6
R 13
=
R3 + R4 + R6
Aufgabe 1.8:
Lösung:
a)
R + R2
1
−R 2
0
−R 2
R2 + R5 + R3
−R 3
0
Ia
U2 + U1
−R 3 · I b = U3 − U2
R3 + R4
Ic
−U3
b)
I5 = I b =
U0
4R
c)
U5 = R 5 · I 5 = R ·
U0
4R
=
U0
4
84
Aufgabe 3.1:
I
a)
0,7V
U
Abb. 120
b)
Ua
=
Ua
=
Ua
=
1
Ue f ür Ue (t) < t 1
2
0, 7 f ür t 1 < t < t 2
1
Ue f ür t 2 < Ue (t)
2
Ua
0,7V
t1
t2
t
Abb. 121
Aufgabe 3.2:
a) Zur Berechnung müssen nun Annahmen gemacht werden.
Annahme:
– D1 in Durchlaufrichtung, d.h. U D1 = 0
– D2 in Durchlaufrichtung, d.h. U D1 = 0
Damit ergibt sich folgendes Schaltbild:
85
U 1 = 10V
R1 = 10k Ohm
R 2 = 5k Ohm
U2 = −15V
Abb. 122
Die gemachten Annahmen müssen jetzt durch die Berechnung von I D1 und U D2 überprüft werden. (Paßt der
Strom durch die Diode zu der angenommenen Spannung über der Diode)
I R1 =
I R 2 = I D2 =
U1
R1
−U2
R
= 1mA
=
15V
5kΩ
= 3mA
U2
UR
Abb. 123
I D1 = I R1 − I R2 = −2mA
Mit diesem Ergebnis sieht man, dass D1 nicht in Durchlassrichtung ist.
Die Annahme muss also korrigiert werden.
Neue Annahme:
– D1 in Sperrichtung, d.h. I D1 = 0
– D2 in Durchlaufrichtung, d.h. U D1 = 0
86
U 1 = 10V
R1 = 10k Ohm
R 2 = 5k Ohm
U2 = −15V
Abb. 124
Superposition:
I D2
U1
I D2
I D2
ges
U2
=
=
=
2
3
10V
15kΩ
15V
15kΩ
=
2
3
mA
= 1mA
mA + 1mA =
U D1 = U1 − R 1 · I D1 = 10V − 16
5
3
mA!
2
2 p
= −6 V
3
3
b) Zur Übung selbst rechnen!
Ergebnis: U D1 = −6, 17V , I D1 = 0mA, U D2 = 0, 75V , I D2 = 1, 62mA
Aufgabe 3.3:
a) Elektronen und Löcher
b) gesperrt, aktiv normal, aktiv invers und gesättigt
c) NPN
d) UAUS = UC C
e)
IB =
IB · R B + UD = UE I N
U E I N −U D
−1V
= 2V
= 0, 1mA
RB
100kΩ
I C = 10mA
87
Aufgabe 3.4:
Im I B (U BE)-Diagramm liest man bei UBE = 0, 7V Für I B den Wert 100µA ab. Für die Größe von R B berechnet man
daraus:
RB =
E − UBE
IB
=
5V − 0, 7V
100µA
= 43kΩ
Da die Ausgangsspannung UC E = 2, 5V sein soll, muss am Widerstand R C die Spannung 5V - 2,5V = 2,5V abfallen.
Die Größe des zugehörigen Kollektorstroms I C liest man im zweiten Diagramm (Ausganskennlinien) ab.
I C (UC E = 2, 5V, I B = 100µA) = 10mA
Damit ergibt sich für den Wert von R C : R C =
2,5V
10mA
= 250Ω
Aufgabe 4.1:
Ausg angsuml au f : Ua = −U D
I D = I S · e UD
UT
IR =
=
ID
Ue
R
I S · e UD
UT
Ue
=
R
Ue
I S · e UD
UT
=
R
I S · e −Ua
UT
Ue
=
R · IS
Ua
−
UT
e− Ua
UT
Ua
Ue
=
ln
=
−U T · ln
R · IS
Ue
R · IS
Aufgabe 5.1:
a) Spannungsteiler: UGS =
U
2
=5 V
b) bei UGS = 5 V ist der Drainstrom I D = 200 µA
c) Maschenumlauf:
U = I1 · R1 + I2 · R2
I1 = I D + I2
U
=
=
(I D + I 2 ) · R 1 + I 2 · R 2
I D · R 1 + I 2 · (R 1 + R 2 )
88
I2 =
U − I D · R1
R1 + R2
U2 = I 2 · R 2 =
U − I D · R1
R1 + R2
· R2
Einsetzen der Werte:
U2
=
10V − 0, 2mA · 10kΩ
U2
=
8V ·
20kΩ
1
2
· 10kΩ
= 4V
Aufgabe 5.2:
RD
RG
a)
UG
IG
UDS
U0
UDD
UGS
RS
Abb. 125
RG =
UG =
R1 · R2
R1 + R2
R2
R1 + R2
= 60kΩ
· U DD = 6V
b)
Abb. 126: Übertragungskennlinie
I G = 0A ⇒ UG = UGS + I D · R S
89
ID =
UG − UGS
RS
= 1, 2mA −
UGS
5kΩ
Bestimme zwei Punkte der Geraden und zeichne sie ein:
c)
I D (4, 5V ) = 300µA; I D (6V ) = 0A ⇒ I D = 200µA bei UGS = 5V
U DS = U DD − I D · R D − I S · R S = U DD − I D · (R D + R S ) = 6V
U0 = U DS + I S · R S = U DS + I D · R s = 7V
Aufgabe 5.3:
Da man keine Kennlinie mehr vorliegen hat, muss der Strom I DS für ein UG D ausgerechnet werden. Dazu müssen
Annahmen über den Betriebsbereich gemacht werden (wie bei Dioden auch!).
E
RL
D
G
UX
UGS
UDS
UY
S
Abb. 127
1. U x = UGS 2. Kirchhoffsches Gesetz
2. I DS · R L + U DS = E
Um I DS zu berechnen wird die Annahme gemacht, dass sich der Transistor im Abschnürbreich (Sarturation) befindet.
I DS
Kn
· (UGS − U T H )2
2
25µA
· (3V − 1V )2 = 50µA
2V 2
=
=
Jetzt muss kontrolliert werden, ob die Annahme (Abschnürbereich) stimmt.
U DS = E − I DS · R L = 10V − 50µA · 100kΩ = 5V
UGS > U T H ?
3V > 1V
U DS − U T H ≤ U DS ?
2V ≤ 5V
p
p
Die Annahme über den Betriebsbereich stimmt.
90
Aufgabe 5.4:
In einem CMOS-complex-gate implementiert das NMOS-Netzwerk die negierte Funktion (es wird im Pfad nach
GND implementiert), während das PMOS-Netzwerk die nichtnegierte Funktion (Pfad zu VDD ) mit negierten Literalen (wegen des Einsatzes von PMOS-Transistoren) implementiert. Soll eine logische Funktion implementiert
werden, so muss sie in eine der beiden folgenden Formen umgewandelt werden:
• Y = l o g ischerAusd ruck
• Y = Li teral1 Bool escheVerknüp f ung1 Li teral2 ...Li teral n
Im ersten Fall kann das NMOS-Netzwerk sehr einfach implementiert werden, im zweiten Fall das PMOSNetzwerk.
Zum Problem:
Hier ist es einfacher, das PMOS-Netzwerk zu implementieren und danach das komplementäre NMOS-Netzwerk.
Hier gelten zwei einfache Regeln: Eine logische UND-Verknüpfung entspricht seriell verschalteten Transistoren,
eine logische ODER-Verknüpfung parallel verschalteten Transitoren. Das entstehende PMOS-Netzwerk ist unten
abgebildet.
VDD
A
B
D
C
E
Y
NMOS Netzwerk
Abb. 128
Um das komplementäre NMOS-Netzwerk zu bekommen, zeichnen wir zuerst den Graph des PMOS-Netzwerkes:
VDD
A
D
B
C
E
Y
Abb. 129
91
Jetzt wird in jedem eingeschlossenen “Raum” ein Punkt für die Knoten des NMOS Graphen gezeichnet, zusätzlich
dazu jeweils ein Punkt für GND und ein Punkt für Y.
VDD
A
D
B
GND
Y
C
E
Y
Abb. 130
Jetzt muss ein Graph konstruiert werden, bei dem jede Kante des PMOS Graphen mit einer Kante des NMOS
Graphen geschnitten wird:
VDD
A
B
D
GND
Y
C
E
Y
Abb. 131
Die gesamte Schaltung ergibt sich also zu:
92
VDD
A
B
D
C
E
Y
D
E
B
C
A
Abb. 132
93
Kapitel 8
Schaltkreissimulation
In der Schaltkreissimulation wird versucht unter Verwendung von numerischen Verfahren das Verhalten einer
(analogen) Schaltung zu berechnen. Diese Verfahren haben in der modernen Elektrotechnik einen hohen Stellenwert erreicht und sind zu unverzichtbaren Werkzeugen in allen Teilgebieten geworden.
Es werden verschiedene Ansätze verwendet, die Schaltung in mathematische Formeln zu modellieren. Diese sind
• die Knoten - Spannungs - Methode,
• das bekannte Maschenstromverfahren sowie
• die Knotenanalyse und die von ihr abgeleitete
• modifizierte Knotenanalyse.
Das Ziel dieses Anhangs ist es, mit Hilfe der beschriebenen Verfahren in der Lage zu sein, eine Simulation eines
Schaltnetzes in einem mathematischen Tool, wie z.B. MatLab, selbst durchführen zu können.
Hierzu wird die modifizierte Knotenanalyse eingeführt und gezeigt, warum sich dieses Verfahren für die (automatisierte) Analyse eignet.
Maschenstromverfahren
Das Verfahren ist bereits in Kapitel 1 erklärt worden. Wie dort zu sehen ist, muss im als Teilschritt der Analyse ein
Baum aufgestellt werden. Die Erzeugung dieses Baums ist aber für ein rein mathematisches Tool, wie z.B. MatLab,
ein grosses Problem. Daher verliert man mit dem Maschenstromverfahren die Möglichkeit, eine automatische
Analyse der Schaltung durchzuführen.
Knotenanalyse (Nodal Analysis)
Die Knotenanalyse ist für lineare und nicht lineare Netzwerke geeignet. Das zu berechnende Netzwerk wird in ein
lineares Gleichungssystem der Form Y · U = I umgewandelt. Y ist die Knotenadmittanzmatrix, I der Vektor der
unabhängigen Stromquellen und U der Vektor der zu ermittelnden Knotenspannungen. Um die Knotenpotentiale
über die Kirchhoff’sche Knotenregeln zu ermitteln, geht man wie folgt vor:
1. Wähle einen Referenzknoten. Dieser wird mit 0 benannt und im entstehenden Gleichungssystem wird die
ihn beschreibende Knotengleichung nicht berücksichtigt. Meist wird der Ground gewählt.
94
2. Nun werden alle relevanten Netzwerknoten mit 1..k-1 benannt. Es ergibt sich, dass diese Potentiale relativ
zum Knoten 0 bestimmt werden.
3. Es wird jetzt die Knotenadmittanzmatrix Y nach folgendem Schema bestimmt:
a) Die Elemente der Hauptdiagonalen von Y errechnen sich aus der Summe der Admittanzen, die mit
dem jeweiligen Knoten, der dieser Position in der Y -Matrix entspricht verbunden sind. Dies bedeutet,
dass jeweils die Summe der Leitwerte an einem Knoten an die jeweilige Position eingetragen wird.
b) Die nicht diagonalen Elemente entsprechen den negativen Leitwerten der Zweige zwischen den entsprechenden Knotenindizes.
4. Im U -Vektor stehen die unbekannten Knotenpotenziale.
5. Der I -Vektor bildet sich aus den vorhandenen Stromquellen. Alle Quellströme, die in Richtung eines Knoten
orientiert sind, werden mit positiven Vorzeichen eingetragen, diejenigen, die vom Knoten weg gerichtet sind,
mit einem negativen Vorzeichen.
Häufig existieren in den Netzwerken aber auch Spannungsquellen. Für diese existiert aber keine Admittanzdarstellung. Eine Möglichkeit besteht in der Umwandlung der vorhandenen Spannungsquellen in Stromquellen mit
Innenwiderstand.
I
I= U
R
U
R
R
U = I*R
Abb. 133: Spannungsquellentransformation
Beispiel und Herleitung der Darstellung
Knoten 1
Knoten 2
R0
Knoten3
R2
R1
I0
R4
R3
Knoten 0 = Bezugsknoten
Abb. 134: Beispielnetzwerk
Wir wenden nun die gerade genannten Regeln auf das in Abbildung 134 gezeigte Netzwerk an. Dabei entsteht
folgendes Gleichungssystem:
G0
−G0
0
−G0
G0 + G1 + G2
−G2
0
U1
I1
−G2
· U2 = 0
G2 + G3 + G4
U2
0
95
Diese Matrix ergibt sich folgend:
1. Nummerieren der Knoten, beginnend von einem Startknoten aus.
2. Anwenden vom 1. Kirchhoffs’schen Gesetz auf jeden Knoten. Ausgehende Ströme sind positiv. Dabei entstehen in unserem Beispiel die folgenden drei Gleichungen:
Knoten 1: −i0 +
U1 −U2
R0
Knoten 2:
U2
R3
+
U2 −U1
R0
Knoten 3:
U3
R3
+
U3
R4
+
=0
+
U2 −U3
R2
U3 −U2
R2
=0
=0
3. Dies kann nun zu der oben benutzten Matrixschreibweise leicht umgeformt werden.
Modifizierte Knotenanalyse (Modified Nodal Analysis)
Das Problem in der Knotenanalyse stellen Spannungsquellen Die Knotenanalyse wurde modifiziert. Die ersten
Schritte bleiben identisch:
1. Wähle einen Referenzknoten. Dieser wird mit 0 benannt und im entstehenden Gleichungssystem wird die
ihn beschreibende Knotengleichung nicht berücksichtigt. Meist wird Ground gewählt.
2. Nun werden alle relevanten Netzwerknoten mit 1..k-1 benannt. Es ergibt sich, dass diese Potentiale relativ
zum Knoten 0 bestimmt werden.
Das aus Kapitel 6 bekannte Y · U = I -Schema wird erweitert auf:
YR
C
B
D
U
J
·
=
I
F
Dieses Schema wird wie folgt gefüllt:
1. Es wird jetzt die Knotenadmittanzmatrix YR nach folgendem Schema bestimmt:
a) Die Elemente der Hauptdiagonalen von YR errechnen sich aus der Summe der Admittanzen, die mit
dem jeweiligen Knoten, der dieser Position in der YR -Matrix entspricht verbunden sind. Dies bedeutet,
dass jeweils die Summe der Leitwerte an einem Knoten an die jeweilige Position eingetragen wird.
b) Die nicht diagonalen Elemente entsprechen den negativen Leitwerten der Zweige zwischen den entsprechenden Knotenindizes.
2. Die Bereiche B ,C und D bilden sich folgend und werden später für die Darstellung der MNA benötigt: Führe
nun für jede Spannungsquelle eine neue Spalte und Zeile ein. Am Anfangsknoten, dem minus-Pol, wird
eine 1 eingeführt, am Endknoten eine -1. Falls einer dieser Knoten der Startknoten ist, so wird die dortige
Null nicht verändert. Die Werte werden in Spalte wie Zeile eingeführt, so dass die Symmetrie sich nicht
verändert.
3. U ist der Vektor der unbekannten Knotenspannungen.
4. I enthält diejenigen Ströme deren Zweig eine Spannungsquelle enthalten, oder die berechnet werden sollen.
5. J beinhaltet die unabhängigen Stromquellen.
6. F beinhaltet die unabhängigen Spannungsquellen.
96
Beispiel und Herleitung der Darstellung
1
I2
R2
4
I5
2
I6
I1
Uq
Iq
I4
Uq1
2
R4
3
R1
R3
I3
0
Abb. 135: Beispielnetzwerk
Bei korrekter Anwendung der obigen Regeln erhält man folgendes Gleichungssystem:
G1 + G2
−G2
0
0
0
0
−G2
G2
0
0
1
1
0
0
G3
0
0
−1
0
0
0
G4
−1
0
0
1
0
−1
0
0
0
1
−1
0
0
0
U1
U2
U3
U4
I5
I6
·
=
Iq
0
0
0
Uq1
Uq2
Hier die vollständige Herleitung der Matrix:
1. Durch die Kirchhoff’sche Knotengleichung besagt, dass für jeden Netzwerkknoten die Summe aller zufliessenden Ströme gleich der Summe der abliessenden Ströme ist (A · I = 0). Daraus ergibt sich folgende Gleichung:
1
0
0
0
1
−1
0
0
0
0
1
0
0
0
0
1
0
1
0
−1
0
1
−1
0
·
I1
I2
I3
I4
I5
I6
=0
2. Die Ströme I 1 , I 2 , I 3 und I 4 können wie folgt ausgedrückt werden:
I1
=
I2
=
I3
=
I4
=
G1 · U1 − I q
G2 · U1 − G2 · U2
G3 · U3
G4 · U4
3. I 5 und I 6 werden wie folgt bestimmt:
Uq1
=
Uq2
=
U2 − U4
U2 − U3
4. Folgendes Gleichungssystem erhält man, wenn die Gleichungen aus (2) in (1) eingesetzt werden:
1
0
0
0
1
−1
0
0
0
0
1
0
0
0
0
1
0
1
0
−1
0
1
−1
0
·
G1 · U1
G2 · U1 − G2 · U2
G3 · U3
G3 · U4
I5
I6
=
I0
0
0
0
97
5. Nun kann man die Systeme aus (3) und (4) zusammensetzten und erhält das gewünschte Resultat.
Dies kann auch allgemein durchgeführt werden.
98
Teil II.
Labor: Theorie, Simulation, Praxis
99
Kapitel 9
Grundlagen der Meßtechnik
9.1. Versuchsvorbereitung
In diesem Versuch werden die Grundlagen der elektrischen Meßtechnik erläutert. Neben einer Einführung in
die Grundlagen des Messens, sowie der Fehlerrechnung werden die Meßgeräte Vielfachmeßgerät und Oszilloskop
in ihrer Funktionsweise und Bedienung vorgestellt. Bei der Durchführung der Versuche werden die in der Versuchsvorbereitung betrachteten Schaltungen aufgebaut. Anhand von Messungen werden die Ergebnisse mit den
errechneten Werten verglichen und die auftretenden Fehler diskutiert.
9.1.1. Grundlagen des Messens
Eine Größe G messen heißt, die Maßzahl G zu bestimmen, die aussagt, wie oft die zugehörige Maßeinheit [G] in
der Größe enthalten ist.
Es ist also:
Größe
= Maßzahl · Maßeinheit
G
= G · [G]
Zum Beispiel: Spannung = 5 · 1 V
Die Festlegung der Maßeinheit bildet daher die Grundlage des Messens.
Die physikalischen Gesetze können durch mathematische Beziehungen wiedergegeben werden, z. B. ist die Spannung U für den durch den Widerstand R fließenden Strom I dem Produkt R · I proportional:
U = C ·I ·R
100
Im Allgemeinen wird C 6= 1 sein, wenn die Einheiten für Strom, Spannung und Widerstand festgelegt sind. Indem
man nur zwei Einheiten festlegt, z. B. für den Strom [A] und die Spannung [V ], kann man den Widerstand wie
folgt definieren:
1 Ω ist die Größe des Widerstands, durch den bei der angelegten Spannung von 1 V ein
Strom von 1 A fließt.
Damit gilt (C = 1):
U = I · R,1V = 1A·1Ω
9.1.2. Grundeinheiten, abgeleitete Einheiten, Maßsysteme
9.1.2.1. mksA-System
Seit dem 1.1.1948 ist das mksA-System das international gültige Maßsystem (Meter-Kilogramm-Sekunde-AmpereSystem). Zu den drei Grundeinheiten der Mechanik kommt noch eine Einheit der Elektrizitätslehre [A] hinzu.
Definition der Länge: 1 m ist definiert als die Länge der Strecke, die das Licht im Vakuum während
des Zeitintervalls von 1/299.792.459 Sekunden durchläuft (1983).
Definition der Masse: 1 kg ist festgelegt durch die Masse des Internationalen kg-Prototyps (1889).
Definition der Zeit: 1 s ist das 9.192.631.770fache der Periodendauer der dem Übergang zwischen
den beiden Niveauzuständen von Atomen des Nukleids Cäsium 133 entsprechenden Strahlung (1967).
Definition des Amperes: Zwei unendlich lange, parallele Drähte mit vernachlässigbar kleinen Querschnitt, deren Leiterwerkstoff die Permeabilität des Vakuums hat, sind im Abstand von 1 m angeordnet.
Sie werden vom gleichen Gleichstrom durchflossen. Dieser hat die Stromstärke 1 A, wenn die elektrodynamische Kraft pro Längeneinheit (1 m) genau 2 · 10−7 Newton beträgt (1 Newton = 1 k g · m · s−2 ).
1967 bzw. 1971 wurde das mksA-System mit den Einheiten [K] (Kelvin, Temperatur), [cd] (Candela, Lichtstärke)
und [mol] (Mol, Stoffmenge) auf ein System mit sieben Grundeinheiten erweitert. Im Bereich der Mechanik und
Elektrizität hat sich damit nichts geändert. Es wurde lediglich der Wirkungsbereich des Systems vergrößert.
Beziehungen, die unterschiedliche physikalische Größen untereinander verknüpfen, können zur Definition von
Einheiten herangezogen werden. Beispiel:
1V
1Ω =
1A
Ω ist damit eine abgeleitete Einheit.
101
9.1.3. Fehlerrechnung
9.1.3.1. Grundbegriffe
a) Absoluter Fehler:
Istanzeige - Sollanzeige =
Anzeige - wahrer Wert =
F = A−W
F kann positives oder negatives Vorzeichen haben.
b) Relativer Fehler:
f =
A−W
W
· 100% ≈
A−W
A
· 100%
Die Näherung ist bei kleinen Fehlern zulässig.
9.1.3.2. Herkunft der Fehler
Grobe Fehler (Ausreißer) können z. B. durch falsche Einstellung von Meßgeräten oder durch fehlerhaftes Ablesen hervorgerufen werden. Solche Fehler müssen durch entsprechende Kontrollen bzw. Plausibilitätsprüfungen
unbedingt ausgeschlossen werden. Danach verbleiben die systematischen und die zufälligen Fehler. Die ersteren
können korrigiert werden, bei den letzteren ist eine statistische Auswertung möglich.
9.1.3.3. Systematische (methodische) Fehler
Systematische Fehler entstehen durch Nichtbeachtung von erfaßbaren Fehlereinflüssen, z. B. die Änderung des
Strom I während der Messung durch den Innenwiderstand R i des Meßgeräts.
I’
R0
R
R0
R
A
U0
I
U0
Ri
Abb. 136: Systematischer Fehler bei der Strommessung
102
Ohne Amperemeter:
I=
U0
R0 + R
Mit Amperemeter:
I′ =
U0
R0 + R + R i
Nach U0 aufgelöst und gleichgesetzt ergibt sich:
I=
R0 + R + R i
R0 + R
· I′
Den wahren Wert I erhält man daher durch Multiplikation der Anzeige I ′ mit dem Korrekturfaktor k I :
I = I ′ · kI
mit
kI = 1 +
Ri
R0 + R
Ein entsprechender Fehler ergibt sich bei der Spannungsmessung.
R0
V
U0
U
R
U’
Ri
Abb. 137: Systematischer Fehler bei der Spannungsmessung
Ohne Spannungsmesser:
U = U0 ·
R
R0 + R
Mit Spannungsmesser:
′
U = U0 ·
R·R i
R+R i
R·R
R 0 + R+Ri
i
Daraus folgt:
U=
R0 · R
1+
R0 + R · R i
· U′
Den wahren Wert U erhält man daher durch Multiplikation der Anzeige U ′ mit dem Korrekturfaktor kU :
U = U ′ · kU
mit
kU = 1 +
R0 · R
R0 + R · R i
Zu den systematischen Fehlern gehören auch prinzipiell erfaßbare Umwelteinflüsse, wie z. B. Temperatureinflüsse
oder Fremdeinflüsse, die einen Fehler bestimmten Betrags und bestimmten Vorzeichens verursachen. Diese Fehler
können, falls eine hohe Genauigkeit erforderlich ist, durch die entsprechende Korrektur des Meßergebnisses erfaßt
werden.
103
9.1.3.4. Zufällige Fehler
Nach Berücksichtigung aller systematischen Fehler ist das Ergebnis immer noch mit Fehlern behaftet. Eine
große Zahl unerfaßbarer Umwelteinflüsse ruft durch schwankende Beeinflussung eine Streuung der Meßergebnisse nach Betrag und Vorzeichen hervor. Durch statistische Verfahren können aber auch hier Aussagen gemacht
werden. Dazu ist allerdings eine ganze Meßreihe (Stichprobe) erforderlich.
Beispielsweise werden mit einem Millivoltmeter n = 10 Messungen durchgeführt. Die erhaltenen Meßergebnisse
x i sind unten angegeben.
i
1
2
3
4
5
6
7
8
9
10
Summe
x i /mV
103
106
102
104
105
104
104
103
104
105
1040
∆i /mV
-1
2
-2
0
1
0
0
-1
0
1
0
∆2i /(mV )2
1
4
4
0
1
0
0
1
0
1
12
Zunächst wird der Mittelwert der Stichprobe bestimmt.
x=
n
1X
n
x i = 104 mV
i=1
Danach werden die Abweichungen ∆i vom Mittelwert und deren Quadrate berechnet.
∆i = x i − x
Die Streuung (empirische Standardabweichung) s der Stichprobe ist:
ÈP
s=
n
i=1 (x i
− x)2
n−1
ÈP
=
n
2
i=1 ∆ i
n−1
= 1.155 mV
In den meisten Fällen, bei denen viele kleine Abweichungen (mit unterschiedlichem Betrag und Vorzeichen) vorliegen, ergibt sich die sogenannte Gaußsche Normalverteilung.
Die vorangegangen zehn Meßwerte sind nur eine Stichprobe aus der Grundgesamtheit mit theoretisch unendlich
vielen Werten, die einer Gaußschen Normalverteilung H(x) (Gaußsche Glockenkurve) entsprechen soll.
104
Bei sehr vielen Meßpunkten N ergibt sich diese Normalverteilung mit dem Mittelwert µ und der Standardabweichung σ.
(x−µ)2
1
−
· e 2·σ2
p
σ· 2·π
H(x) =
mit:
µ=
N
1 X
N
xi
i=1
und:
s
σ=
1
N
X
N −1
i=1
(x i − µ)2
Die wesentlichen Merkmale der Gaußschen Glockenkurve sind das Maximum beim Mittelwert µ und die Wendepunkte bei den Werten (µ ± σ).
Gesucht wird in der Regel der Mittelwert µ der Grundgesamtheit. Der Mittelwert x der Stichprobe ist bekannt.
Zwar kann µ nicht aus x bestimmt werden, aber die Statistik erlaubt die Angabe eines Vertrauensintervalls
v um x , in dem der Mittelwert µ der Grundgesamtheit mit einer bestimmten Wahrscheinlichkeit P liegt. Das
Vertrauensintervall ist:
t
t
[x − p · s, x + p · s]
n
n
Das heißt der Mittelwert µ der Grundgesamtheit liegt im Bereich:
t
t
x − p ·s ≤µ≤ x + p ·s
n
n
Dabei ist t von der Zahl n der Meßpunkte der Stichprobe und der angenommenen Wahrscheinlichkeit P , mit der
µ in dem Bereich liegt, abhängig (t-Verteilung). Eine Tabelle mit der t-Verteilung befindet sich im Anhang.
Beispiel:
Das Vertrauensintervall für P = 95% und eine Stichprobe von n = 10 ist (t=2.26):
2.26
2.26
[x − p · 1.155, x + p · 1.155]
10
10
Das bedeutet, der Mittelwert µ der Grundgesamtheit, der bei einer sehr großen Zahl von Messungen bestimmt
werden würde, liegt mit 95% Wahrscheinlichkeit innerhalb des Bereichs:
x − 0.83 mV = 103.17 mV ≤ µ ≤ x + 0.83 mV = 104.83 mV
Das Vertrauensintervall ist bereits kleiner als die Streuung der Stichprobe. Falls eine weitere Verkleinerung des
Vertrauensintervalls nötig ist, muß die Zahl der Messungen n erhöht werden. Das gilt auch, wenn eine höhere
statistische Sicherheit gefordert wird.
Vor jeder Anwendung der statistischen Methoden ist allerdings zu prüfen, ob überhaupt eine Normalverteilung
vorliegt (Stichwort: Summenhäufigkeit).
Zur Kontrolle der Fertigungsqualität von Widerständen werden Stichproben entnommen und deren Widerstandswerte R X mit dem Prüfaufbau aus Abbildung 138 ermittelt.
105
;
, $1=
5R
5 L$
$
8R
,[
9
8$1=
8[
5[
5 L9
Abb. 138: Beispiel-Schaltung
;
;
Aufgabe 9.1: Berechnen Sie die Spannung UX und
den Strom I X für den Fall idealer Meßgeräte (R iA = 0 Ω, R iV → ∞,
L$
L9
aber R 0 6= 0 Ω).
L$
L9
Aufgabe 9.2: Die Meßgeräte seien nun nicht mehr ideal (R iA 6= 0 Ω, R iV 6= ∞). Bestimmen Sie die Anzeigen (UAN Z , I AN Z )
$1=
$1=
der Meßgeräte.
;
Aufgabe 9.3: Berechnen Sie die Korrekturfaktoren der Strom- bzw. Spannungsmessung und leiten Sie daraus die
Gleichung zur Bestimmung des Widerstands R X ab.
$1=
L$
$1=
L9
;
Aufgabe 9.4: Bei einer Messung wurden I AN Z = 19.86 mA und UAN Z = 9.40 V abgelesen. Für die Messgeräte gilt:
R iA = 20 Ω, R iV = 10 kΩ. Bestimmen Sie den wahren Wert von R X und berechnen Sie den absoluten und
relativen systematischen Fehler für den Fall, daß der Innenwiderstand der Meßgeräte vernachlässigt wird.
Mit dem Prüfaufbau wurde unter Verwendung des Korrekturfaktors eine Stichprobe von 20 Widerständen vermessen. Es ergaben sich
folgende Werte:
500Ω, 499Ω, 503Ω, 501Ω, 498Ω, 502Ω, 501Ω, 497Ω, 500Ω, 504Ω
499Ω, 501Ω, 500Ω, 499Ω, 502Ω, 500Ω, 501Ω, 498Ω, 502Ω, 500Ω
Aufgabe 9.5: Berechnen Sie den Mittelwert x und die Streuung s der Stichprobe.
[
Nach Bilden der relativen Summenhäufigkeit der Stichprobe stellt sich heraus, daß eine Normalverteilung vorliegt.
Aufgabe 9.6: Bestimmen Sie das Vertrauensintervall des Widerstandsnennwertes für eine Wahrscheinlichkeit von
P = 95%.
9.1.4. Das Vielfachmeßgerät/Digitalmultimeter
Da elektrische Größen durch menschliche Sinne nicht direkt erfaßbar sind, werden sie im Meßgerät in visuell erfaßbare Anzeigen
umgesetzt, z. B. in eine Winkeländerung, die als Zeigerausschlag über einer Skala beobachtbar ist.
Früher wurden vorwiegend Drehspul- und Dreheiseninstrumente eingesetzt. Die Entwicklung in der Digitaltechnik hat die Analogtechnik
mittlerweile allerdings verdrängt. Abbildung 139 zeigt den schematischen Aufbau eines Digitalmultimeters.
Eingangsteiler
Analog-Digital-Wandler
Anzeige
Eingangs-
ADC
größe
0.102 V
Abb. 139: Digitalmultimeter (schematisch)
Nachdem die Spannung durch den Eingangsteiler entsprechend geteilt worden ist, erfolgt die Wandlung z. B. nach dem Dual Slope1
Prinzip. Bei der Abtastung des Analogsignals werden drei Funktionen ausgeführt.
• Zeitquantisierung (Abtastung) des Analogsignals
1
Verschiedene AD-Wandlerprinzipien werden im 4. Versuch beschrieben.
106
• Diskretisierung (Amplitudenquantisierung) des abgetasteten Signals
• Codierung des wert- und zeitquantisierten Signals
Die Kennwerte eines AD-Wandlers, der die Abtastung ausführt, sind:
• Auflösung
• Quantisierungsrauschen
• Umwandlungsrate
• Umwandlungszeit
Bei diesen Operationen werden systematische Fehler gemacht, die das Meßergebnis beeinflussen. In der Regel sind in der Bedienungsanleitung Hinweise zur Genauigkeit des Meßgeräts zu finden.
Ein Vielfachmeßgerät besitzt z. B. folgende Meßfunktionen.
• Spannungsmessung, Bereich: bis max. 1000 V
• Strommessung, Bereich: bis max. 20 A
• Widerstandsmessung, Bereich: bis max. 30 MΩ
• Durchgangsprüfung und Diodentest
Abbildung 140 zeigt ein Digitalmultimeter.
Beschreibung der Bedienelemente
1) LC-Display: Flüssigkeitskristallanzeige2
2) Meßbereichsschalter
3) Data-Hold-Taster: „Festhalten” von Meßwerten
4) Range-Hold-Taster: Ausschalten der Auto-Range-Funktion. Die Bereichswahl erfolgt dann manuell.
5) AC/DC- Taste: Mit dieser Taste schalten Sie von Gleichstrommessung um auf Wechselstrommessung oder auch von Diodentest auf Durchgangsprüfung (akustisch).
6) 20-A-Eingang: Dieser Meßeingang ist für Gleich- und Wechselströme bis max. 20 A ausgelegt.
7) mA-Eingang: An diesem Eingang können Gleich- und Wechselströme bis max. 300 mA gemessen werden.
8) COM(-)-Eingangsbuchse: COM3 - bzw. Minusanschluß
9) V-Ohm-(+)-Eingangsbuchse: Plusanschluß
2
3
LCD - liquid crystal display
COM=common, gemeinsamer Anschluß
107
Abb. 140: Digitalmultimeter
Wichtig bei der Benutzung:
Bei Messungen unbekannter Größen ist immer zuerst im größten Messbereich zu beginnen. Beim Wechsel der
Messarten (z. B. von V /kΩ auf mA bzw. A oder umgekehrt) ist unbedingt darauf zu achten, sowohl die entsprechenden Buchsen zu verwenden, als auch den Drehschalter umzustellen, da sonst die Gefahr besteht, das Messgerät zu
beschädigen.
Durch Parallel- oder Reihenschaltung von Widerständen lassen sich Strom- bzw. Spannungsmeßbereich erweitern.
9.1.5. Das Oszilloskop
Das nützlichste und vielseitigste elektronische Meßinstrument ist das Oszilloskop. In der Regel dient es zum Betrachten von Spannungen als Funktion der Zeit. Abbildung 141 zeigt eine Spannung, deren Amplitude sich sinusförmig mit der Zeit ändert.
108
Abb. 141: Sinusförmige Wechselspannung
Diese sogenannte Wechselspannung wird durch drei Größen beschrieben.
1. Scheitelspannung Um
2. Spannung von Scheitel zu Scheitel Uss
3. Periodendauer (in s oder ms) T
Zwischen der Periodendauer und der Frequenz besteht folgender Zusammenhang.
T=
1
f
Die in Abbildung 141 gezeigte Wechselspannung
hat eine Periodendauer von 20 ms. Die Frequenz ist also 50 Hz .
o
¶
Die Aufnahme eines solchen Signals mit dem Oszilloskop ist in Abbildung 142 zu sehen. Den Betriebsmodus eines Oszilloskops, welcher eine Spannung über der Zeit aufnimmt, bezeichnet man als YT-Modus. Im YT-Modus wird die X-Achse des Schirms in Zeitintervalle
unterteilt. Die Intervalldauer kann verändert werden. Die Y-Achse des Schirms wird in Spannungsintervalle unterteilt. Das in Abbildung
142 dargestellte Signal zeigt eine sinusförmige Wechselspannung. Die Zeitbasis4 gibt an, welche Größe eine Teilung (Rechteck) auf
dem Schirm darstellt. In der Abbildung beträgt die Zeitbasis 5 ms/Div5 . Um die Periodendauer zu ermitteln werden die Teilungen zusammengezählt. In diesem Fall ergeben sich vier Teilungen. Die Periodendauer beträgt also 20 ms. Dies entspricht einer Frequenz von
50 Hz .
Abb. 142: Sinusförmige Wechselspannung
4
5
Teilweise wird auch der Begriff Zeitablenkung benutzt.
5 ms/Division - also 5 ms pro Teilung.
109
Die Ablenkung der Y-Achse steht auf 1 V/Div.
Aufgabe 9.7: Bestimmen Sie den Scheitelwert der Spannung.
Das Oszilloskop verfügt über einen Betriebsmodus, der eine Spannung über einer anderen Spannung darstellt. Dieser Modus heißt
XY-Betrieb. Abbildung 143 zeigt die im XY-Betrieb aufgenommene Übertragungskennlinie eines CMOS-Inverters.
Abb. 143: Übertragungskennlinie eines Inverters
110
9.1.5.1. Funktionsweise eines Analogoszilloskops
Das Prinzip eines Analogoszilloskops wird in Abbildung 144 dargestellt.
Abb. 144: Blockschaltbild eines Analogoszilloskops
Oszilloskope haben in der Regel mindestens zwei Eingangskanäle. Die Signale beider Kanäle können als Funktion der Zeit dargestellt
werden. Für jeden Kanal ist ein Eingangsverstärker vorhanden. Jeder Kanal hat eine Taste, mit der man die sogenannte Kopplung
auswählen kann. Das verwendete Oszilloskop besitzt fünf verschiedene Kopplungsmöglichkeiten. Die wichtigsten drei Kopplungen sind
im folgenden aufgeführt.
1. DC6 -Kopplung: Bei der DC-Kopplung werden sowohl AC- als auch DC-Anteil des Signals übertragen.
2. AC7 -Kopplung: Bei der AC-Kopplung wird der DC-Anteil im Signal blockiert.
3. GND8 -Kopplung: Bei der GND-Kopplung wird der Verstärkereingang geerdet. Man schaltet auf GND, um die Nullinie zu schreiben.
In der Stellung DC sind Eingangsbuchse und Verstärkereingang leitend verbunden. In der Stellung AC ist zwischen Eingangsbuchse
und Verstärker ein Kondensator geschaltet, der den Gleichspannungsanteil des zu messenden Signals vom Verstärker fernhält.
Jeder Kanal hat einen Empfindlichkeitseinsteller. Die Empfindlichkeit des Eingangsverstärkers wird in Spannung pro Teilung angegeben. Die Zeitbasis bestimmt die Zeit pro Teilung. Mit den Positionseinstellern können die Bilder beider Kanäle vertikal verschoben
werden. Die Nullinie verschiebt sich selbstverständlich auch.
Da sich die Funktionsweise von analogen und digitalen Oszilloskopen unterscheidet, wird nun auf das verwendete Digitaloszilloskop
eingegangen.
6
7
8
DC ist die Abkürzung für direct-current, also Gleichstrom.
AC ist die Abkürzung für alternating-current, also Wechselstrom.
Ground
111
9.1.5.2. Funktionsweise eines Digitaloszilloskops
Folgende Abbildung zeigt das Blockschaltbild eines Digitaloszilloskops.
Abb. 145: Blockschaltbild eines Digitaloszilloskops
Nach Verstärkung des Signals wird das gefilterte Signal einem AD-Wandler zugeführt. Das digitalisierte Signal wird in einen Meßwertspeicher geschrieben. Je nach Ausführung des Oszilloskops wird bei analoger Anzeige eine DA-Wandlung vorgenommen. Alternativ kann, wie bei den verwendeten Oszilloskopen, direkt ein Bildschirm (TFT) angesteuert werden. In der Regel wird das digitale
Speicheroszilloskop so betrieben, daß ständig gewandelt und in den Speicher eingelesen wird. Durch das mit Trigger bezeichnete Signal wird die Wandlung angehalten, so daß im Speicher die vor der Triggerung liegenden Meßwerte enthalten sind. Diese Eigenschaft
macht das digitale Speicheroszilloskop zur Messung einmaliger Vorgänge, auf die nicht getriggert werden kann, besonders geeignet.
Ein weiterer Vorteil von digitalen Speicheroszilloskopen ist die Möglichkeit der zeitlich unbegrenzten Speicherung der Meßwerte. Diese
können über eine geeignete Schnittstelle (z. B. IEC 625-Bus) direkt zum Rechner übertragen werden. Dadurch wird eine weitere
Signalverarbeitung, z. B. mit Hilfe der Fast-Fourier-Transformation (FFT) ermöglicht.
9.1.5.3. Triggerung
Der Trigger legt fest, wann das Oszilloskop Daten erfaßt und beginnt, ein Signal anzuzeigen. Wenn ein Trigger richtig eingestellt wurde,
kann er instabile oder leere Anzeigen, wie in Abbildung 146, in aussagekräftige Signale umwandeln.
Abb. 146: Beispiel für getriggerte und nicht getriggerte Signale
Wenn das Oszilloskop mit der Erfassung eines Signals beginnt, sammelt es genügend Daten, um das Signal links vom Triggerpunkt zu
zeichnen. Das Oszilloskop fährt mit dem Sammeln von Daten fort, während es auf das Auftreten einer Triggerbedingung wartet. Nach
dem Auftreten einer Triggerbedingung setzt das Oszilloskop das Sammeln von Daten fort, um das Signal rechts vom Triggerpunkt zu
zeichnen.
Die Triggerung kann auf ansteigende oder abfallende Flanken des Signals erfolgen, wie Abbildung 147 zeigt.
112
Abb. 147: Mögliche Triggerflanken
In der Regel wird man als Triggerquelle die Eingangskanäle benutzen. Es ist aber auch möglich, auf externe Quellen oder die Netzspannung zu triggern. Des weiteren kann man, analog zu den schon beschriebenen Kopplungsmöglichkeiten der Eingangskanäle, mit
der sogenannten Triggerkopplung festlegen, welcher Teil des Signals (AC-/DC-Anteil) auf die Triggerung Einfluß nehmen kann.
Abb. 148: Triggermenü
Abbildung 148 zeigt das schon bekannte Sinussignal. Am rechten Bildschirmrand werden die Einstellungen der Triggerung angezeigt.
Eine wichtige Einstellung ist die Flanke (Slope) auf die getriggert wird. Dabei kann zwischen positiver (rising) und negativer (falling)
Flanke umgeschaltet werden. Als Quelle (Source) wird Kanal 1 (CH 1) benutzt. Als Kopplung (Coupling) ist DC eingestellt. Das bedeutet,
daß sowohl AC- als auch DC-Anteile im Signal eine Auswirkung auf den eingestellten Trigger-Level (Pegel) haben. Der Trigger-Level,
in diesem Fall 0.00 V , wird im Schirmbild unten rechts neben CH 1 angezeigt. Dort ist außerdem graphisch angezeigt, daß auf die
steigende Flanke getriggert wird.
9.1.5.4. Aliasing
Aliasing tritt auf, wenn das Oszilloskop die Signale nicht schnell genug abtastet, um eine präzise Signalaufzeichnung zu ermöglichen.
Beim Aliasing wird ein Signal angezeigt, das eine niedrigere Frequenz als das eigentliche Eingangssignal aufweist, wie in Abbildung
149 zu sehen.
113
Abb. 149: Aliasing
Um ein Signal präzise darzustellen und Aliasing zu vermeiden, muß das Signal mit einer Frequenz abgetastet werden, die mehr als
doppelt so hoch ist, wie die höchste Frequenz des Signals.
f max ≤
1
2
· fAbt
Ein Signal mit Frequenzkomponenten von 5 M Hz muß zum Beispiel mit mindestens 10 Millionen Abtastungen pro Sekunde abgetastet
werden.
9.1.5.5. Bedienung des Oszilloskops
In diesem Praktikum wird das Digitaloszilloskop TDS 210 der Firma Tektronix eingesetzt. Dabei handelt es sich um ein ZweikanalOszilloskop mit 60 MHz Bandbreite.
Abb. 150: Frontbild des TDS 210
In Abbildung 150 ist die Frontplatte, die in einzelne Funktionsbereiche unterteilt ist, zu sehen. Das Oszilloskop ist mit einer Menüsteuerung für die Sonderfunktionen ausgestattet.
Wenn Sie eine Menütaste an der Frontplatte drücken, wird oben rechts am Bildschirm der Menütitel angezeigt. Unterhalb des Menütitels
können bis zu fünf Menüfelder angezeigt werden. Rechts von jedem Menüfeld befindet sich eine Rahmentaste, die Sie zum Ändern der
Menüeinstellungen verwenden können.
Vertikale Steuerung
• CH 1, CH 2 Position: Verschiebt das Signal vertikal. Wenn die Cursor zum Messen eingeschaltet sind, können die Cursor
mit diesen Knöpfen positioniert werden.
• CH 1, CH 2 Menü: Zeigt das Menü für den Kanal an und schaltet die Kanalanzeige ein und aus. In dem Menü lassen sich
z. B. die Kopplung(DC/AC/GND) und die Tastkopfteilung einstellen.
114
• Volts/Div(CH 1, CH 2): Ändert die Aufteilung der Y-Achse. Dazu stehen kalibrierte Skalenfaktoren zur Verfügung.
• Math Menü: Zeigt das Menü mit den mathematischen Operationen für Signale an. Die Eingangssignale können dort subtrahiert oder addiert angezeigt werden.
Horizontale Steuerung
• Position: Stellt die horizontale Position aller Kanäle und mathematischen Signale ein.
• Horizontal Menü: Dort kann z. B. ein Zoombereich eingegeben und dann angezeigt werden.
• Sec/Div: Dient der Auswahl der horizontalen Aufteilung der X-Achse. Wenn die Option Zoombereich aktiviert ist, ändert sich
die Breite des Zoomfensters.
Triggersteuerung
• Level: Setzt den Amplitudenlevel, den das Signal kreuzen muß, um eine Erfassung auszulösen. Als Holdoff-Steuerung legt
sie die Zeitdauer fest, die vergehen muß, bevor das nächste Triggerereignis erfaßt werden kann.
• Trigger Menü: Zeigt das Trigger-Menü, mit dem Trigger-Flanke, Quelle, Modus und Kopplung geändert werden können.
• Level 50%: Der Trigger-Level wird auf den Mittelpunkt zwischen den Spitzenwerten des Triggersignals eingestellt.
• Trigger Zwang: Startet eine Erfassung unabhängig von einem Triggersignal.
• Trigger View: Zeigt, während die Taste gedrückt gehalten wird, das Triggersignal an.
115
Menü und Steuertasten
• Save/Rec: Zeigt das Speichern/Abrufen-Menü für Einrichtungen und Signale.
• Messung: Zeigt das automatische Messungs-Menü. Hier können 4 unterschiedliche Messungen durchgeführt werden. Es
kann der gewünschte Kanal(Quelle) und der Typ der Messung ausgewählt werden. Es können Frequenz, Periode, maximale
und mittlere Spannungen berechnet werden.
• Erfassung: Zeigt das Erfassungs-Menü. Es kann die Art der Datenerfassung gewählt werden. In der Regel sollte hier die
Normale Abtastung eingestellt werden.
• Display: Zeigt das Anzeigen-Menü. Dort kann u.a. von der Darstellung YT, welche die Amplitude über der Zeit aufträgt in die
XY-Darstellung umgeschaltet werden. Bei der XY-Darstellung wird eine Spannung über einer anderen Spannung aufgetragen.
Diese Darstellung wird zum Aufnehmen von Übertragungskennlinien verwendet.
• Cursor: Zeigt das Cursor-Menü. Mit Hilfe von zwei Marken, die über die vertikale Steuerung (Position) bewegt werden, können
Zeiten/Spannungen bzw. Zeit/Spannungs-Differenzen gemessen werden.
• Dienstpgm.: Zeigt die Dienstprogramm-Menüs. Hier kann u.a. die Sprache verändert werden.
• Autoset: Stellt die verschiedenen Parameter des Oszilloskops automatisch ein.
• Run/Stop: Startet und stoppt die Signalerfassung.
116
Anzeigebereiche
Abb. 151: Anzeige des TDS 210
1) Die Symbolanzeige zeigt den Erfassungsmodus.
2) Zeigt den Trigger-Status an.
3) Markierung zeigt die horizontale Trigger-Position. Diese wird durch die Steuerung für die horizontale Position eingestellt.
4) Ausgabe zeigt die Zeitdifferenz zwischen dem mittleren Raster und der horizontalen Trigger-Position. Die Bildschirmmitte entspricht Null.
5) Markierung zeigt den Trigger-Level.
6) Anzeige gibt die Spannung des Trigger-Levels an.
7) Zeigt Trigger-Flanke an.
8) Ausgabe zeigt die Trigger-Quelle an.
9) Ausgabe zeigt die Zeitbasiseinstellung, wenn sie verwendet wird.
10) Ausgabe zeigt die Haupt-Zeitbasiseinstellung.
11) Ausgaben zeigen die vertikalen Skalenfaktoren für die Kanäle.
12) Anzeigenbereich für kurze Meldungen.
13) Bildschirmmarkierungen zeigen Basisreferenzpunkte der angezeigten Signale.
9.1.5.6. Tastkopf
Ein Tastkopf dient zur hochohmigen Messung und zur Erweiterung eines nicht ausreichenden Meßbereichs von Oszilloskopen. Meist
beträgt das Übersetzungsverhältnis 10, in Ausnahmefällen auch 100 oder 1000 (Hochspannungstastkopf). Der Tastkopf kann als ein
sogenannter gemischter RC-Teiler aufgefaßt werden. Die Kapazitäten sind sogenannte parasitäre Kapazitäten. Das heißt, das Vorhandensein ist eigentlich nicht erwünscht und ist eine Eigenschaft der Widerstände und Leitungen des Tastkopfes. Ein gemischter Teiler
hat folgendes Aussehen.
117
C1
R1
U1
R2
C2
U2
Abb. 152: Gemischter RC-Teiler
Unter einem Teiler (Spannungsteiler) versteht man eine Schaltung die eine große Eingangsspannung U1 entsprechend dem Übersetzungsverhältnis Uω auf eine kleinere Ausgangsspannung U2 herabsetzt.
Uω =
U1
U2
Das Übersetzungsverhältnis Uω ist allgemein von der Frequenz ω der Wechselspannung abhängig. Die beiden Grenzwerte des Übersetzungsverhältnisses ergeben sich für die Frequenz ω = 0 und für ω = ∞.
Uω=0 =
R1 + R2
R2
und
Uω=∞ =
C1 + C2
C1
Diese entsprechen damit allein dem ohmschen bzw. dem kapazitiven Übersetzungsverhältnis.
Das Übersetzungsverhältnis kann nur dann frequenzunabhängig werden, wenn auch diese beiden Grenzwerte des Übersetzungsverhältnisses übereinstimmen.
118
Damit ergibt sich:
Uω=0 = Uω=∞
und
R 1 · C1 = τ1 = R 2 · C2 = τ2
Die Zeitkonstanten τ der beiden RC-Glieder müssen übereinstimmen. Der Tastkopf ist dann abgeglichen.
Der Tastkopf wird um eine variable Kapazität erweitert, wie Abbildung 153 zeigt. Die Kapazität C1 ist am Tastkopf durch eine Schraube
einstellbar.
Tastkopf
R1
C1
Eingang
gemessene Spannung
R2
C2
Oszilloskop
Abb. 153: Tastkopf / Oszilloskop
Abbildung 153 ist als Ersatzschaltbild eines Tastkopfes (R 1 und C1 ) und eines Oszilloskops zu interpretieren (R 2 und C2 ). Die Eingangsimpedanz des Oszilloskops wird durch den Widerstand R 2 = 1 MΩ und den Kondensator C2 = 30 pF dargestellt.
Aufgabe 9.8: Berechnen Sie für einen abgeglichenen Tastkopf mit einem Übersetzungsverhältnis von 10 den Wider-
stand R 1 und den Kondensator C1 .
Aufgabe 9.9: Berechnen Sie die Zeitkonstante τ.
Aufgabe 9.10: Welchen Widerstand und welche Kapazität weist der Tastkopf am Eingang auf? Überlegen Sie sich da-
zu, wie die eingangsseitige Ersatzschaltung bezüglich Widerstand (ω = 0) bzw. Kapazität (ω = ∞) aussieht.
Es zeigt sich, daß durch den Tastkopf auch die Eingangsimpedanz erheblich erhöht wird. Dabei ist die Erhöhung des ohmschen
Anteils von geringerem Interesse als die Verminderung des kapazitiven Anteils. Diese Verminderung erlaubt erst eine Messung in
elektronischen Schaltungen hoher Frequenz oder hoher Schaltgeschwindigkeit.
Da der Tastkopf jeweils auf ein Meßgerät abgeglichen werden muß, muß der Abgleich gegebenenfalls überprüft werden. Näheres dazu
in der Versuchsdurchführung.
119
9.1.6. Spannungsteiler, Berechnung eines einfachen RC-Gliedes
Im folgenden sollen die praktisch durchzuführenden Versuche theoretisch vorbereitet werden.
9.1.6.1. Widerstandsmessung
Aufgabe 9.11: Welche Buchsen am Vielfachmeßgerät sind für eine Widerstandsmessung zu benutzen und welche Ein-
stellungen sind vorzunehmen?
9.1.6.2. Spannungsteiler
Aufgabe 9.12: Skizzieren Sie einen Spannungsteiler.
Aufgabe 9.13: Berechnen Sie für die Widerstände R 1 = 1 kΩ und R 2 = 1 kΩ die Ausgangsspannung bei einer Ein-
gangsspannung von 12 Volt.
Aufgabe 9.14: Berechnen Sie den Strom durch die Widerstände R 1 und R 2 .
Aufgabe 9.15: Überlegen Sie, wie die Schaltung zur Spannungsmessung und Strommessung bei dem Teiler aufge-
baut wird. Welche Buchsen am Vielfachmeßgerät sind zu benutzen und welche Einstellungen sind vorzunehmen?
9.1.6.3. RC-Glied bei Rechteckspannung
Gegeben sei das in Abbildung 154 dargestellte RC-Glied.
R
1
Eingang
C1
U1
Ausgang
U2
Abb. 154: RC-Glied
Die Bauelemente haben folgende Werte:
• Widerstand: 10 kΩ
• Kondensator: 100 nF
Aufgabe 9.16: Berechnen Sie die Zeitkonstante τ.
Das Eingangssignal ist ein Rechtecksignal wie das in Abbildung 155 dargestellte. Die Frequenz beträgt 100 Hz und die Amplitude des
Rechtecksignals beträgt 5 V ol t . Die Zeiten T1 und T2 sind identisch. Der Kondensator ist für t < 0 ungeladen.
Abb. 155: Rechtecksignal
Aufgabe 9.17: Berechnen Sie die Periodendauer des Signals.
120
Aufgabe 9.18: Skizzieren Sie das Eingangs- und Ausgangssignal unter Angabe der jeweiligen Anfangs- und End-
spannung, sowie der Zeitkonstanten.
Aufgabe 9.19: Berechnen Sie die Spannung für t = τ.
Auf der Webseite des Praktikums zum ersten Versuch befindet sich ein Applet, welches den Lade- und Entladevorgang simuliert.
9.1.7. Simulation des RC-Glieds mit PSPICE
SPICE9 ist in den 60er Jahren an der University of California Berkeley von Donald Pederson entwickelt worden. PSPICE10 wurde von
der Firma MicroSim auf Basis des freien Source Codes von SPICE entwickelt. Heute wird PSPICE von der Firma ORCAD vertrieben.
Mit PSPICE können Schaltungen vollständig im Rechner simuliert werden. Die Schaltungen können Widerstände, Kapazitäten, Induktivitäten, unabhängige Spannungs- und Stromquellen, Dioden, BJTs, MOSFETs etc. enthalten.
Diese Einführung bezieht sich auf die PSPICE 9.1 STUDENT Version, die im ZIP-Archiv zu finden ist.
Zum Zeichnen von Schaltplänen stehen zwei Schaltplaneditoren zur Verfügung. Diese heißen SCHEMATICS und CAPTURE. Diese
Einführung basiert auf SCHEMATICS.
Nach Start des Programms zeigt sich der in Abbildung 156 dargestellte Schaltplaneditor.
Abb. 156: SCHEMATIC ENTRY
Öffnen Sie das Fenster zum Neuspeichern einer noch nicht mit einem Namen versehenen Datei FILE/SAVE AS und speichern Sie Ihr
leeres Arbeitsblatt unter dem Namen UEB.SCH. Nach Anklicken der Schaltfläche SPEICHERN wird automatisch der neue Name der
Schaltung oben auf dem Arbeitsblatt vermerkt.
9
10
Simulation Program with IC Emphasis
Personal Computer SPICE
121
Zur Einführung soll jetzt der Spannungsteiler mit den Widerständen R 1 = 1 kΩ und R 2 = 1 kΩ simuliert werden. Die Eingangsspannung beträgt 12 Volt.
Öffnen Sie das Menü DRAW und aktivieren Sie darin GET NEW PART... Daraufhin öffnet sich das Fenster PART BROWSER BASIC
oder das Fenster PART BROWSER ADVANCED. Öffnen Sie das Fenster LIBRARY BROWSER. Aktivieren Sie im rechten Teil von
LIBRARY BROWSER die Bibliothek ANALOG.SLB durch Anklicken des Namens ANALOG.SLB. In dieser Bibliothek befindet sich das
Bauteil Widerstand bzw. Resistor. Wählen Sie R aus und klicken dann auf PLACE. Das Schaltzeichen des Widerstands erscheint auf
der Arbeitsfläche. Die Widerstände werden automatisch nummeriert.
Wählen Sie jetzt die Bibliothek SOURCE.SLB aus. Aus dieser Bibliothek benötigen Sie die Gleichspannungsquelle VDC11 .
Schließen Sie den PART BROWSER durch Anklicken der Schaltfläche CLOSE.
Zum Verdrahten der Schaltung gehen Sie wie folgt vor.
Aktivieren Sie im Menü DRAW die Option WIRE. Der Cursor verwandelt sich in einen Bleistift. Durch einen rechten Mausklick wird der
Verdrahtungsmodus beendet.
Klicken Sie mit dem Bleistift-Cursor den oberen Anschluss der Spannungsquelle an und bewegen Sie den Cursor nach oben, bis zu
der Stelle, an der die Leitung nach rechts abknicken soll. Führen Sie den Cursor auf den Anschluss des Widerstands. Klicken Sie den
Widerstandsanschluss an. Nach dem Verdrahten ergibt sich ein Schirmbild wie in Abbildung 157 dargestellt.
Abb. 157: Spannungsteiler mit Verdrahtung
Jede Schaltung benötigt noch eine Masse. Die Masse bzw. das Massezeichen findet sich in der Bibliothek PORT.SLB unter dem Namen
AGND12 .
Setzen Sie das Massezeichen in Ihre Schaltung ein.
Die Attribute eines Bauteils können durch Markierung und Aufruf von Menü EDIT ATTRIBUTES geändert werden.
11
12
Voltage Source Direct Current
Analog Ground
122
Die Eigenschaften der Spannungsquelle sind in Abbildung 158 dargestellt.
Abb. 158: Eigenschaften der Spannungsquelle
Tragen Sie eine Gleichspannung von 12 Volt ein.
Das Speichern der Datei schließt die Schaltplaneingabe ab.
Jetzt soll der Spannungsteiler simuliert werden. Öffnen Sie das Menü ANALYSIS und starten Sie die Simulation durch Aktivieren von
SIMULATE. Nach kurzer Zeit erscheint das sogenannte Probe-Fenster. Für die Gleichstromanalyse hat es keine Bedeutung und kann
geschlossen werden. Die Ergebnisse der Simulation können mit dem Menü ANALYSIS DISPLAY RESULTS ON SCHEMATIC in den
Spannungsteiler eingeblendet werden. Dazu wählen Sie z. B. ENABLE VOLTAGE DISPLAY. Abbildung 159 zeigt das Ergebnis der
Simulation.
123
Abb. 159: Spannungsteiler mit berechneten Werten
Jetzt soll mit PSPICE die Berechnung des RC-Glieds kontrolliert werden.
Aufgabe 9.20: Geben Sie das RC-Glied im SCHEMATIC ein. Der Widerstand besitzt 10 kΩ. Der Kondensator besitzt
100 nF . Fügen Sie der Versuchsvorbereitung einen Ausdruck des SCHEMATIC (alternativ Netzliste) hinzu.
Zur Simulation wird jetzt eine Rechteckspannung benötigt. Dazu wird die Spannungsquelle VPULSE aus der Bibliothek SOURCE.SLB
benötigt.
Mit der Spannungsquelle VPULSE können periodische Rechteckspannungen (Impulse) erzeugt werden. Die Attribute von VPULSE sind
im folgenden mit entsprechender Erklärung aufgeführt. Die Impulse haben während der Pausen die Spannung, die bei V1 eingetragen
ist. Die Pulshöhe läßt sich über V2 festlegen. Die Anstiegszeit der Impulse wird mit TR festgelegt. Die Abfallzeit mit TF. TR und TF
dürfen beliebig klein (z. B. 1 ns) gewählt werden, jedoch nicht 0. PW legt die Pulsbreite fest. PER legt die Periodendauer fest.
Das Eingangssignal ist ein Rechtecksignal wie das in Abbildung 155 dargestellte. Die Frequenz beträgt 100 Hz und die Amplitude des
Rechtecksignals beträgt 5 V ol t . Die Zeiten T1 und T2 sind identisch.
Die Simulation des RC-Glieds ist eine sogenannte Transienten-Analyse. Die Spannung wird, wie bei einem Oszilloskop, über der Zeit
dargestellt.
Wählen Sie im Menü ANALYSIS die Option SETUP und klicken Sie auf die Schalfläche Transient. Nun müssen Sie die Zeiten PRINT
STEP und FINAL TIME angeben. Die Zeiten sollten zur Periodendauer des Eingangssignals passend gewählt werden.
Das Starten der Simulation erfolgt wie bei der Gleichstromanalyse.
Nach dem Abschluß der Simulation wird das Probe-Fenster geöffnet. Im Menü TRACE kann mit ADD TRACE die gewünschte Spannung
ausgewählt werden.
Aufgabe 9.21: Drucken Sie das Simulationsergebnis mit Eingangsspannung und Ausgangsspannung aus.
124
9.2. Versuchsdurchführung
9.2.1. Benötigtes Material
Geräte
1
1
1
1
1
Labornetzteil
Funktionsgenerator
Oszilloskop
Vielfachmeßgerät
Steckbrett
Bauteile
2
1
1
Widerstände, 1 kΩ
Widerstand, 10 kΩ
Kondensator, 100 nF = 100 · 10−9 F
9.2.2. Messungen mit dem Vielfachmeßgerät
Aufgabe 9.22: Welchen Wert besitzen die Widerstände bei Messung mit dem Vielfachmeßgerät?
Aufgabe 9.23: Welche Fehlerquellen existieren bei der Widerstandsmessung?
Aufgabe 9.24: Geben Sie die Farbcodierung der Widerstände an.
Bauen Sie den im theoretischen Teil betrachteten Spannungsteiler (R 1 = 1 kΩ, R 2 = 1 kΩ, Eingangsspannung: 12 Volt) auf. Die
Beschreibung des Steckbretts, sowie Hinweise zum Aufbau befinden sich im Anhang auf Seite 188.
Aufgabe 9.25: Messen Sie die Spannung über den Widerständen.
Aufgabe 9.26: Messen Sie den Strom im Netzwerk.
Aufgabe 9.27: Welche Fehlerquellen verfälschen die Meßergebnisse?
9.2.3. Grundlegende Messungen mit dem Oszilloskop
In diesem Teil sollen Sie lernen, wie man das Oszilloskop bedient und wie einfache Messungen ausgeführt werden.
9.2.3.1. Inbetriebnahme des Gerätes
Schalten Sie das Oszilloskop am Netzschalter (oben links) ein. Nach einem kurzen Selbsttest ist das Gerät betriebsbereit.
Mit den Tasten CH 1 und CH 2 Menü können die zwei Eingangssignale angezeigt werden. Wenn noch kein Signal anliegt, wird die
Null-Linie gezeichnet.
Machen Sie sich jetzt mit der Menüsteuerung vertraut.
9.2.3.2. Schreiben eines Bildes
Bringen Sie den Funktionsgenerator (siehe Abbildung 219, S. 186) in folgende Grundeinstellung:
Betriebsart (Function)
DC-Offset - Schalter
Amplitude
Netzschalter
: Sinus
: nicht gedrückt
: ganz nach links
: gedrückt (ein)
Stellen Sie am Generator eine Sinusfunktion mit einer Frequenz von 1 kHz (1000 Hz ) ein.
125
Verbinden Sie die Ausgangsbuchse 50 Ω-OUTP. des Generators mittels einer abgeschirmten Leitung (Koaxialkabel) mit dem Eingang
des Kanals 1 (CH 1) des Oszilloskops. Stellen Sie die Teilung auf „1X” (Softkey: Tastkopf).
Bei Messungen mit dem Oszilloskop ist es wichtig, die sogenannte Nullinie festzulegen. In dem Menü-Punkt Kopplung kann man
die Filter (AC, DC, GROUND) auswählen. Beim Auswählen von GROUND wird die Nullinie geschrieben. Diese Linie entspricht 0 Volt.
Schieben Sie diese Linie mittels Position in die Mitte des Schirms. Schalten Sie jetzt die Kopplung auf DC. Stellen Sie die Empfindlichkeit
des Y-Verstärkers auf 200 mV/Div13 .
Aufgabe 9.28: Wie stellen Sie den Zeitkoeffizienten (Sec/Div) ein, wenn Sie ungefähr eine Periode der anliegenden
Sinusfunktion sichtbar machen wollen?
Aufgabe 9.29: Wieviele Perioden sehen Sie auf dem Schirm, wenn der Zeitkoeffizient auf 0.25 ms/Div steht?
Aufgabe 9.30: Wie groß ist die Ausgangsspannung des Funktionsgenerators bezüglich der Nullinie und Spitze bzw.
Spitze zu Spitze?
Zu jedem Oszillogramm gehört grundsätzlich die Angabe der horizontalen und vertikalen Ablenkmaßstäbe und der
Null-Linie.
9.2.3.3. Trigger
Stellen Sie die Triggerart (Triggermenü: Modus) auf AUTO.
Stellen Sie den Zeitkoeffizienten auf 0.25 ms/Div.
Aufgabe 9.31: Welche Einstellungen sind notwendig, damit das Meßsignal im Nulldurchgang auf der ansteigen-
den Flanke getriggert wird und ein eventuell vorhandener Gleichspannungsanteil auf den Triggerzeitpunkt
keinen Einfluß hat? Bestimmen Sie Trigger-Coupling, Trigger-Source, Trigger-Slope und Trigger-Level.
Auf dem Schirm muß jetzt ein stehendes Bild mit genau 2.5 Perioden des Eingangssignals erscheinen.
Stellen Sie Trigger-Level so ein, daß die Ablenkung exakt im Nulldurchgang getriggert wird. Beobachten Sie das Schirmbild während
des Einstellens.
Aufgabe 9.32: Verändern Sie nun den Trigger-Level. Um wieviele Perioden läßt sich die Kurve mit dem Trigger-Level
Regler maximal aus der vorhin eingestellten Ruhelage verschieben?
9.2.3.4. Wirkung der Kopplung
Schalten Sie am Funktionsgenerator die Offsetspannung ein. Drehen Sie den Regler für die Offsetspannung langsam vom linken
Anschlag bis zum rechten Anschlag.
Aufgabe 9.33: Wie groß ist die Offsetspannung minimal bzw. maximal?
Aufgabe 9.34: Bei welcher Spannung erhält man das gleiche Schirmbild wie ohne eingeschalteten Offset?
Ändern Sie nun die Kopplung des Kanals (Menü CH 1/2) auf AC. Drehen Sie den Regler für die Offsetspannung langsam vom linken
Anschlag bis zum rechten Anschlag.
Aufgabe 9.35: Wie verändert sich das Schirmbild?
9.2.4. Tastkopfabgleich
In den folgenden Versuchsteilen wird ausschließlich mit den Tastköpfen gemessen. Die Tastköpfe besitzen ein Teilungsverhältnis von
10. Sie müssen jedoch zuerst abgeglichen werden. Den richtigen Abgleich sollten Sie bei jedem folgenden Versuchstermin überprüfen.
13
200 mV/Division - also 200 mV pro Teilung.
126
Der Abgleich erfolgt mittels eines Rechtecksignals von ca. 1 kHz , das dem Kalibrierungsausgang des Oszilloskops entnommen wird.
Der Kalibrierungsausgang befindet sich links neben dem Kanal 1 Eingang.
Verbinden Sie die Tastköpfe mit dem Oszilloskop (Kanal 1 und 2) und stellen Sie die Tastkopfteilung auf „10X” (Menü CH 1/2).
Stellen Sie den Zeitkoeffizienten auf 0.25 ms, die Y-Verstärkung bei Kanal 1 und 2 auf 1 V/Div. Betreiben Sie zuerst Kanal 1.
Schließen Sie den Tastkopf des Kanals 1 an den Kalibrierungsausgang (5 V) des Oszilloskops. Drehen Sie nun die durch ein Loch im
Tastkopf zugängliche Schraube vorsichtig mit einem kleinen Schraubendreher und beobachten Sie den Bildschirm. Der Tastkopf ist
abgeglichen, wenn ein sauberes Rechteck gezeichnet wird.
Aufgabe 9.36: Skizzieren Sie die Schirmbilder jeweils bei maximalem Fehlabgleich (unter- bzw. überkompensiert).
Ändern Sie die Horizontalablenkung so, daß etwa eine Periode sichtbar ist.
Stellen Sie den Zeitkoeffizienten wieder auf 0.25 ms/Div und gleichen Sie beide Tastköpfe ab.
9.2.4.1. Zweikanalbetrieb
Verbinden Sie den Funktionsgenerator und den BNC-Stecker des Stecksbretts mittels BNC-Kabel. Klemmen Sie den Tastkopf, der an
Kanal 2 angeschlossen ist, an den BNC-Stecker.
Stellen Sie die Empfindlichkeit des Y-Verstärkers 2 auf 1 V/Div und die Ausgangsspannung so ein, daß ein 2 cm hohes Bild geschrieben
wird.
Stellen Sie nun am Generator ein Sinussignal mit einer Frequenz von ca. 1050 Hz ein und verändern Sie den Zeitkoeffizienten so, daß
ca. 4-5 Perioden auf dem Bildschirm erscheinen.
Verschieben Sie das Bild mit Vertikal-POS. 2 in die obere Schirmhälfte.
Verbinden Sie den Eingang des Kanals 1 mit dem Kalibrierungsausgang des Oszilloskops mit Hilfe eines Tastkopfes.
Bringen Sie das zweite Bild mit Vertikal-POS. 1 in die untere Schirmhälfte. Die Bildhöhe soll ebenfalls 2 cm sein.
Aufgabe 9.37: Warum läuft das untere Bild weg?
Ändern Sie TRIGGER-SOURCE.
Aufgabe 9.38: Was geschieht und warum?
Aufgabe 9.39: Welche Möglichkeit gibt es, beide Signale darzustellen?
9.2.5. Einfache Messungen
Das Ziel ist es nun, die Periodendauer und die Frequenz zu bestimmen. Das Oszilloskop bietet dazu einige komfortable Messmethoden.
Zum einen kann die Zeit mit Hilfe von Messmarken (Menü Cursor: Typ Zeit) direkt bestimmt werden. Die Marken werden über die
Vertikal Position CH 1/2 gesteuert. Dabei werden die Zeitpunkte und die Zeitdifferenz direkt angezeigt.
Aufgabe 9.40: Bestimmen Sie so die Frequenz des Eingangssignals. Notieren Sie die Frequenz und die Periode. Wel-
che Fehler können bei der Messung auftreten?
Eine noch einfachere Methode bietet das Menü Messung. Dort können vier verschiedene Messungen automatisch vorgenommen
werden. Als erstes muß die Quelle gewählt werden (erster Menüpunkt auf Quelle und dann für die jeweiligen Messungen CH 1/2
wählen. Danach muß der Typ (am ersten Menüpunkt einstellen) festgelegt werden. Für die erste Messung kann dann die Frequenz
ausgewählt werden und für die zweite Messung die Periode. Das Ergebnis wird direkt angezeigt.
9.2.6. RC-Glied-Messung
Bauen Sie auf dem Steckbrett das im Vorbereitungsteil beschriebene RC-Glied auf. Stellen Sie am Funktionsgenerator ein Rechtecksignal mit einer Amplitude von 0 − 5 V ol t und einer Frequenz von 100 Hz ein.
Aufgabe 9.41: Bestimmen Sie die Frequenz des Eingangssignals. An welchen Stellen muß der Tastkopf angeschlossen
werden?
Aufgabe 9.42: Skizzieren Sie das Eingangssignal. Beschriften Sie die Achsen.
Messen Sie mit dem Tastkopf die Spannung über dem Kondensator.
127
Aufgabe 9.43: Tragen Sie die Spannung in die Skizze des Eingangssignals ein.
Aufgabe 9.44: Bestätigen Sie den theoretischen Wert der Zeitkonstante durch Messung. Was sind Fehlerquellen?
Variieren Sie die Frequenz am Funktionsgenerator (z. B. 300 Hz und 1 kHz .).
Aufgabe 9.45: Beschreiben Sie die Wirkung der Frequenzänderung anhand einer Skizze.
Stellen Sie jetzt ein Sinussignal mit der Frequenz 100 Hz ein.
Aufgabe 9.46: Ermitteln Sie die Phasenverschiebung zwischen Eingangs- und Ausgangssignal (Skizze).
Aufgabe 9.47: Verändern Sie die Frequenz (z. B. 1 M Hz ). Welche Veränderung erfährt die Amplitude des Ausgangssi-
gnals?
Vertauschen Sie die Anordnung von Kondensator und Widerstand. Die Frequenz der Eingangsspannung soll 100 Hz betragen.
Aufgabe 9.48: Tragen Sie Eingangssignal und Ausgangssignal in eine Skizze ein. Wie groß ist die Phasenverschie-
bung?
Aufgabe 9.49: Verändern Sie die Frequenz (z. B. 1 M Hz ). Welche Veränderung erfährt die Amplitude des Ausgangssi.
gnals?
Stellen Sie das Oszilloskop auf XY-Betrieb (Menü Display, Format). Die Frequenz der Eingangsspannung soll 100 Hz betragen.
Aufgabe 9.50: Skizzieren Sie das Schirmbild. Stimmt Ihre Beobachtung mit der Theorie überein (Parameterdarstel-
lung eines Kreises bzw. einer Ellipse)?
128
9.3. Versuchsausarbeitung
Überprüfen Sie:
1. Sind alle Skizzen beschriftet?
2. Sind alle Fragen beantwortet?
9.3.1. Fragen
Aufgabe 9.51: Stimmt der berechnete Wert der Zeitkonstante ungefähr mit dem gemessenen Wert überein?
Aufgabe 9.52: Welche Bezeichnung beschreibt das Verhalten des RC-Glieds bei Wechselspannungen?
Aufgabe 9.53: Wozu könnte das RC-Glied eingesetzt werden (mindestens zwei Anwendungsgebiete)?
Aufgabe 9.54: Im Vorbereitungs- und Durchführungsteil ist Ihnen die Wirkung der Kopplung erklärt worden. Mit
welchen Bauelement(en) kann ein solcher Filter realisiert werden? Skizzieren Sie eine Schaltung.
Kontrollfragen
• Zeichnen Sie die Kennlinie eines ohmschen Widerstands. Die Steigung soll ein Maß für den Widerstand sein (Achsenbeschriftung).
• Welchen systematischen Fehler haben Sie bei der Messung von Spannung und Strom gemacht (Erläuterung durch eine Skizze)? Welche Eigenschaft hat ein Strommeßgerät idealerweise? Welche Eigenschaft hat ein Spannungsmeßgerät?
• Skizzieren Sie das Ersatzschaltbild eines Tastkopfs. Welche Eigenschaft(en) soll der Tastkopf idealerweise haben?
• Skizzieren Sie ein RC-Glied. Das RC-Glied soll die Eingangsspannung differenzieren. Kennzeichnen Sie die Eingangs- und die
Ausgangsspannung. Der ohmsche Widerstand ist 10 kΩ. Der Kondensator besitzt 100 nF . Wie groß ist die Zeitkonstante?
• Skizzieren Sie ein RC-Glied. Das RC-Glied soll die Eingangsspannung integrieren. Kennzeichnen Sie die Eingangs- und die
Ausgangsspannung. Der ohmsche Widerstand ist 10 kΩ. Der Kondensator besitzt 100 nF . Wie groß ist die Zeitkonstante?
129
Kapitel 10
Schaltungen mit Halbleiterbauelementen
10.1. Versuchsvorbereitung
In diesem Versuch sollen Dioden, Bipolartransistoren und Operationsverstärker untersucht werden. Die Eigenschaften dieser Bauelemente werden unter anderem durch Kennlinien beschrieben, die im Rahmen dieses Versuches aufgenommen werden sollen. Des
weiteren werden Grundschaltungen mit Operationsverstärkern aufgebaut und ausgemessen.
10.1.1. Dioden
10.1.1.1. Funktionsweise einer Diode
Die Diode besteht aus zwei unterschiedlich dotierten Bereichen. Im p-Bereich wurde durch Einbringen von dreiwertigen Elementen
ein Mangel an Elektronen erzeugt, im n-Bereich durch Einbringen von fünfwertigen Elementen ein Überschuß an Elektronen. Es
bildet sich ein Gleichgewichtszustand mit unterschiedlichen Elektronenkonzentrationen. Der Ladungstransport wird größtenteils von den
Majoritätsträgern bestimmt, d.h. im p-Bereich sind die Defektelektronen oder Löcher verschiebbar, während im n-Bereich Elektronen
für den Stromfluß sorgen. In dem für das Praktikum zur Verfügung gestellten ZIP-Archiv befindet sich das Programm PN, welches die
Vorgänge an einem pn-Übergang simuliert.
Der Anschluß am p-Bereich heißt Anode, der Anschluß am n-Bereich heißt Kathode. Legt man eine positive Spannung UAK an,
so wird der p-Bereich mit Löchern angereichert, während der n-Bereich mit Elektronen „überschwemmt” wird. An der Grenzschicht
rekombinieren die Löcher und die Elektronen unter Energieabgabe. D.h. Elektronen aus dem n-Bereich und Löcher aus dem p-Bereich
„verschwinden” — es fließt Strom. Der Durchlaßstrom darf einen bestimmten Maximalwert I max nicht überschreiten, da die Diode sonst
thermisch zerstört wird.
Legt man eine negative Spannung UAK an, so werden im p-Bereich Löcher „abgesaugt”, während im n-Bereich die Elektronen „abgesaugt” werden. Am pn-Übergang bildet sich ein Mangel an Löchern und Elektronen (Verarmungszone). Es können keine Löcher und
Elektronen rekombinieren. Der Stromfluß ist behindert, die Diode sperrt.
Vergrößert man die angelegte Spannung, so kommt es zum Sperr-Durchbruch der Diode. Hierfür sind zwei physikalische Effekte
verantwortlich.
• Lawinen-Effekt: Bei Sperrbetrieb der Diode erhöht sich die Feldstärke. Diese hohe Feldstärke kann die wenigen Minoritätsträger,
die den Sperrstrom bilden, so stark beschleunigen, daß diese beim Stoß gegen die Gitteratome in der Lage sind, weitere
Elektronen aus Bindungen zu befreien. Diese nun beweglichen Leitungselektronen werden ihrerseits beschleunigt und können
weitere Bindungselektronen aus dem Valenz- in das Leitungsband befördern. Der steile Sperrstromanstieg (Abbildung 160)
kann also durch den Lawineneffekt erklärt werden.
130
• Zener-Effekt1 : Bei starker Dotierung des pn-Übergangs wird die Sperrschicht extrem dünn. Bereits beim Anlegen einer kleinen
Sperrspannung von ca. 4 V können Bindungselektronen direkt aus dem Valenzband des p-Leiters in das Leitungsband des
n-Leiters befördert werden und dort Stromleitung bewirken. Dieser Mechanismus wird als Zener-Effekt bezeichnet.
Die maximale Sperrspannung kann je nach Bauart zwischen 10 V und 10 kV liegen.
Imax
UZ
I
ID
UD UAK
Abb. 160: Diodenkennlinie
Eine typische Diodenkennlinie zeigt Abb. 160. Ist UAK > U D , so leitet die Diode. Die Durchlaßspannung U D ist eine materialabhängige
Konstante, die bei Si-Dioden etwa 0.7 V beträgt. Im Bereich U Z < UAK < 0V sperrt die Diode, während sie für Spannungen UAK < U Z
wieder leitet. Der Übergang vom Durchlaß- in den Sperrbereich erfolgt zeitverzögert, da zunächst die an der Grenzschicht gespeicherte
Ladung abfließen muß. Die Dauer dieses Vorgangs nennt man die Speicherzeit t s . Sie ist um so größer, je größer der Durchlaßstrom
war.
10.1.1.2. Diodentypen
Dioden werden aus unterschiedlichen Materialien hergestellt. Die Silizium-Diode besteht aus einem p- und einem n-dotiertem Halbleiter aus Silizium. Die Germanium-Diode besteht aus einem p- und einem n-dotierten Halbleiter aus Germanium. Da Germanium
einen kleineren Bandabstand als Silizium hat ergibt sich bei Germaniumdioden eine kleinere Knickspannung (U D (Germanium) <
U D (Silizium)).
A
K
Abb. 161: Schaltsymbol einer Si-Diode oder Ge-Diode
Die Schottky-Diode besteht aus einem Metall-Halbleiter-Übergang. Der p-dotierte Halbleiter wird durch einen Metallbereich (z. B. Aluminium) ersetzt, der direkt an den n-dotierten Halbleiter angebracht wird.2 Im Vergleich zu den pn-Dioden haben Schottky-Dioden einen
höheren Durchlaßstrom, eine geringere Durchlaßspannung, aber auch einen höheren Sperrstrom. Des weiteren ist die Speicherzeit
von Schottky-Dioden deutlich kürzer als die von pn-Dioden.
A
K
Abb. 162: Schaltsymbol einer Schottky-Diode
Die Zener-Dioden sind meist Si- oder Ge-Dioden, die mit UAK < 0V betrieben werden. Bei den Zener-Dioden ist die Durchbruchspannung genau spezifiziert und wird als Zenerspannung U Z bezeichnet. Die Kennlinie einer Zener-Diode ist also identisch zu der
einer normalen Diode. Zenerdioden kommen häufig bei der Stabilisierung von Gleichspannungen zum Einsatz. Die stabilisierende
Wirkung der Zener-Diode beruht darauf, daß im Bereich der Zener-Spannung U Z eine große Stromänderung ∆I nur eine kleine
Spannungsänderung ∆U hervorruft.
1
2
Conrad Zener hat den Durchbruch von Dioden 1934 entdeckt.
Je nach Dotierung des n-Halbleiters entsteht an Metall-Halbleiter-Übergängen eine Schottky-Diode oder ein ohmscher Widerstand.
Mit steigender Dotierung nähert sich die Kennlinie des Übergangs der Kennlinie eines ohmschen Widerstands.
131
A
K
Abb. 163: Schaltsymbol einer Z-Diode
Aufgabe 10.1: Erläutern Sie die stabilisierende Wirkung der Zener-Diode anhand einer Kennlinie.
Aufgabe 10.2: Skizzieren Sie eine Schaltung zur Spannungsstabilisierung mit einer Zener-Diode.
Leuchtdioden (LEDs)3 sind Dioden, bei deren Rekombinationen Energie teilweise in Form von Lichtquanten abgegeben wird. Da bei
jeder Rekombination die gleiche Energie frei wird, leuchten Leuchtdioden mit konstanter Wellenlänge. Steigende Temperatur im Kristall
vergrößert die Emissionswellenlänge und verschlechtert den Wirkungsgrad. Bei allen Leuchtdioden nimmt die Strahlungsintensität mit
der Betriebsdauer ab. Bei normalen Betriebsbedingungen liegt die Lebensdauer einer Leuchtdiode bei ungefähr 100 000 Stunden.
A
K
Abb. 164: Schaltsymbol einer Leuchtdiode
Farbe
Infrarot
Standardrot
Gelb
Grün
Blau
Wellenlänge [nm]
950
660
590
565
480
Substrat
GaAs
GaAs
GaP
GaP
SiC
aktive Schicht
GaAs:Si
GaAs0,6 P0,4
GaAs0,15 P0,65 :N
GaP:N
SiC
Abb. 165: Zusammensetzung von Leuchtdioden
Die Bauform einer Leuchtdiode ist in Abbildung 166 zu sehen. Bei Leuchtdioden kennzeichnet die flache Seite des Gehäuses die
Kathode.
Abb. 166: Bauform einer LED
10.1.1.3. Aufnahme von Diodenkennlinien
Aufgabe 10.3: Zeichnen Sie den Schaltplan einer Schaltung zur Aufnahme der Diodenkennlinie im Durchlaßbereich,
wenn Ihnen ein Voltmeter und ein Amperemeter zur Verfügung steht.
3
Light Emitting Diodes
132
Aufgabe 10.4: Bestimmen Sie einen geeigneten Widerstandswert, damit bei einem Eingangssignal von bis zu 5 V ein
maximaler Diodenstrom von 15 mA nicht überschritten wird. Die Knickspannung UK beträgt 0.7 V .
Aufgabe 10.5: Die Diodenkennlinie stellt den Strom durch die Diode als Funktion der Spannung über der Diode dar
( I = f (U)). In welchem Modus müßte man das Oszilloskop für diese Messung betreiben?
Ein Eingang des Oszilloskops soll UAK , der andere I (UAK ) aufnehmen. Das Oszilloskop kann aber nur Spannungen messen. Beachten
Sie, daß die Masse vom Funktionsgenerator, Labornetzteil und den beiden Tastköpfen auf dem selben Potential liegen müssen.
Aufgabe 10.6: Wie kann man eine zum Strom I proportionale Spannung U erzeugen?
Aufgabe 10.7: Zeichnen Sie den Schaltplan einer Schaltung zur Aufnahme der Diodenkennlinie, wenn Ihnen ein
Oszilloskop zur Verfügung steht. Die Ihnen zur Verfügung stehenden Widerstände betragen 10 kΩ und 100 Ω.
Welchen Fehler machen Sie bei dieser Messung?
10.1.2. Bipolartransistoren
Der Wunsch, den elektrischen Strom möglichst ohne Leistungsaufwand zu steuern und somit eine Verstärkung zu erzielen, wurde in der
ersten Hälfte dieses Jahrhunderts durch die Elektronenröhre verwirklicht. Der erste Transistor wurde im Jahre 1948 von J. Bardeen und
W.H. Brattain in den USA erfunden. Kurz danach hat W. Shockley die Eigenschaften der für die Funktion wesentlichen Grenzschichten
(pn-Übergänge) quantitativ erfaßt und beschrieben. Diese drei Physiker erhielten im Jahre 1956 den Nobelpreis für ihre grundlegenden
Arbeiten über den Transistoreffekt. Die Abbildung 167 zeigt den ersten Transistor der Welt.
Abb. 167: Erster Transistor der Welt
Auf den meisten Gebieten haben Transistoren die Vakuumröhre ersetzt. Nur dort, wo hochfrequente Wechselströme mit hoher Leistung
erzeugt werden müssen, z. B. in Endstufen von Radiosendern, gibt es bisher keine den Röhren äquivalenten Halbleiter-Bauelemente.
Nicht bessere Eigenschaften, sondern Robustheit, Kleinheit, die fehlende Heizspannung und schließlich der um ein Vielfaches geringere Preis haben den Erfolg des Transistors bestimmt. Später hat der Feldeffekttransistor den bis dahin vorhandenen Vorteil des sehr
hohen Eingangswiderstandes der Elektronenröhren ebenfalls bieten können.
10.1.2.1. Funktionsweise eines Bipolartransistors
Der Bipolartransistor ist ein Halbleiterbauelement, das zum Verstärken oder Schalten eines Signals eingesetzt werden kann. Kennzeichnend für Bipolartransistoren ist, daß ihr Leitungsverhalten sowohl durch Elektronen- als auch durch Löcherstrom geprägt wird. Im
Gegensatz dazu bezeichnet man MOS-Feldeffektransistoren, deren Wirkungsweise primär nur von einer Sorte von Ladungsträgern,
133
den sogenannten Majoritätsträgern abhängt als unipolare Transistoren. Zur Beschreibung des Bipolartransistors lassen sich verschiedene Modelle heranziehen. Physikalisch besteht der Transistor aus einer Anordnung von Halbleiterschichten wechselnder Dotierung
(siehe Abbildung 168). Aus den beiden möglichen Anordnungen ergibt sich die Einteilung in die Typen npn und pnp. Im Prinzip ist der
Transistor ein symmetrisches Bauelement, wie Abbildung 169 zeigt. Die Pfeile in Abbildung 169 zeigen den pn-Übergang an. In der
technischen Realisierung beeinflußt man jedoch die Kenndaten und das Verhalten eines Transistors durch unterschiedliche Dotierung
und Dimensionierung der Diodenstrecken, so daß der Transistor zwar immer noch in beiden Richtungen betrieben werden kann, aber
von den Betriebsdaten her für eine bestimmte Betriebsrichtung vorgesehen ist.
K B
K B
E
N
P
E
P
N
P
N
PNP-Transistor
NPN-Transistor
Abb. 168: npn/pnp-Transistor (Schnitt)
C
C
B
B
E
E
npn
pnp
Abb. 169: Schaltsymbole
Im folgenden soll der npn-Transistor betrachtet werden.
Betrachtet man das Verhalten des Transistors in einer Schaltung, empfiehlt es sich, das Ersatzschaltbild von Ebers-Moll zu verwenden.
Wie die Diode kann sich der Transistor in verschiedenen Zuständen befinden, für die jeweils bestimmte Ersatzschaltbilder gültig sind.
C
B
C
B
E
(1)
C
B
E
(2)
C
B
E
(3)
E
(4)
Abb. 170: Die vier Ersatzschaltbilder
Den Schaltbildern aus Abbildung 170 liegen die folgenden Zustände zugrunde:
1. Gesperrt: Es fließt kein Strom durch den Transistor.
2. Aktiv normal: Es fließt ein Strom I C vom Kollektor zum Emitter; die Größe dieses Stromes hängt dabei vom Strom I B ab.
Es gilt: I C = I B · Bn , Bn ∈ [9; 300].
3. Gesättigt: Die Strecke Kollektor Emitter verhält sich in etwa wie ein normaler Leiter.
4. Aktiv invers: Der Transistor befindet sich im umgekehrten Betrieb. Es fließt Strom vom Emitter zum Kollektor. Dabei gilt:
I E = I B · Bi , Bi ∈ [2; 9].
134
Der Transistor wird in der Schaltungstechnik zum Schalten und Verstärken von Signalen benutzt. Einer der drei Anschlüsse wird dabei
sowohl der Eingangs- als auch der Ausgangsseite zugeordnet. Je nachdem, welcher der drei Anschlüsse des Transistors dabei auf
festem Potential (Masse oder +UB ) liegt, unterscheidet man die drei Grundschaltungen des Transistors. Diese Grundschaltungen sind
die Basis-, Kollektor-, und Emitterschaltung.
Abbildung 171 zeigt die Grundschaltungen eines npn-Transistors. Alle drei Schaltungen können zur Schaltung und Verstärkung von
Signalen verwendet werden. Da sie jedoch recht unterschiedliche statische und dynamische Eigenschaften besitzen, sind sie nicht als
gleichwertig zu betrachten. Vielmehr hat jede der drei Schaltungen bestimmte Vor- und Nachteile, die sie für spezielle Anwendungsbereiche geeignet macht.
Abb. 171: Die Grundschaltungen eines npn-Transistors
Die Basisschaltung wird im Niederfrequenzbereich (NF) wenig verwendet, besitzt allerdings im Hochfrequenzbereich (HF), vor allem
wegen des geringen Eingangswiderstandes, Vorteile gegenüber der Emitterschaltung.
Bei der Kollektorschaltung, auch Emitterfolger genannt, liegt der Kollektoranschluß auf festem Potential. Wie bei der Emitterschaltung (s.u.) wird der Basisstrom der Eingangsseite und der Kollektorstrom (bzw. Emitterstrom) der Ausgangsseite zugeordnet. Die
Grundschaltung besitzt aufgrund der anderen Beschaltung und der veränderten Lage des Arbeitswiderstands geringere Verstärkungseigenschaften als die Emitterschaltung und wird zu speziellen Anwendungszwecken eingesetzt, z. B. als Impedanzwandler.
Anhand der Emittergrundschaltung wird in der Versuchsdurchführung die Eingangs- und Ausgangskennlinie eines Transistors gemessen.
Folgende Tabelle stellt die Eigenschaften der Grundschaltungen gegenüber.
Schaltung
Eingangswiderstand
Ausgangswiderstand
Spannungsverstärkung
Gleichstromverstärkung
Phasenverschiebung
Temperaturabhängigkeit
Anwendungen
Emitter
Basis
Kollektor
100 Ω ... 10 kΩ
1 kΩ ... 10 kΩ
10 Ω ... 100 Ω
10 kΩ ... 100 kΩ
10 kΩ ... 100 kΩ
10 Ω ... 100 Ω
20 ... 100fach
10 ... 50fach
180
groß
NF- und HF-Verstärker
Leistungsverstärker, Schalter
100 ... 1000fach
<1
0
klein
HF-Verstärker
1
10 ... 4000fach
0
klein
Anpassungsstufen
Impedanzwandler
10.1.2.2. Eingangskennlinien
Unter der Eingangskennlinie eines Transistors versteht man die Funktion I B (UBE ). Der typische Verlauf ist in Abbildung 172 dargestellt.
Die Eingangskennlinie hat den Verlauf einer Diodenkennlinie, denn sie beschreibt das Verhalten der Basis-Emitter-Diode. Bei den
betrachteten Transistoren BC546/547 ist der Eingangsstrom I B im µA-Bereich. Bei einer Stromverstärkung4 von 180 kann ein I C von
100 mA auftreten.
4
Das Datenblatt zum BC546 befindet sich im Anhang.
135
iB [µA]
i
uBE [V]
Abb. 172: Eingangskennlinie
10.1.2.3. Ausgangskennlinien
Die Ausgangskennlinie des Transistors hat im Gegensatz zu den bisher beschriebenen Kennlinien drei Parameter: I C , UBE und UC E .
Erhöht man die Steuerspannung UBE , so wird I C ansteigen, ebenso wenn man UC E erhöht. Zur Darstellung der Ausgangskennlinie
(Abbildung 173) ergibt sich eine Schar von Kennlinien I C (UC E ), wobei UBE der Scharparameter ist.
iC [mA]
[V]
uCE [V]
Abb. 173: Ausgangskennlinie
Zusammenfassend kann man folgende Eigenschaften des Bipolartransistors festhalten.
• Der Bipolartransistor ist ein stromverstärkendes Bauelement.
• Die statische Stromverstärkung B (auch BN ) ist als Quotient aus dem Kollektorstrom I C und dem Basisstrom I B definiert:
I
B = IC . Im Arbeitsbereich ist die Stromverstärkung (näherungsweise) eine Konstante.
B
• Spannungsverstärkung kann dadurch erreicht werden, daß man auf der Eingangsseite einen Eingangswiderstand (R B ) einbringt,
welcher die Eingangsspannung in einen proportionalen Eingangsstrom wandelt, der wiederum durch die Transistorschaltung
verstärkt wird. Auf der Ausgangsseite wandelt man diesen Strom mittels eines Arbeitswiderstands (R C ) entsprechend in eine
Ausgangsspannung zurück.
10.1.2.4. Gehäuseformen
Für die verschiedenen Baugrößen und Einsatzgebiete existiert eine Vielzahl von Gehäuseformen, die sich in der maximal abführbaren
Verlustleistung unterscheiden oder an spezielle geometrische Erfordernisse angepasst sind. Abbildung 174 zeigt einige Gehäuseformen.
136
Abb. 174: Gängige Gehäuseformen
10.1.2.5. Aufnahme von Transistor-Kennlinien
Aufnahme von Eingangskennlinien
Die Aufnahme der Eingangskennlinie eines Transistors verläuft analog zu der einer Diode.
Aufnahme von Ausgangskennlinien
Zur Aufnahme der in Abbildung 173 dargestellten Kennlinienschar I C (UC E ) wird die Schaltung aus Abbildung 175 verwendet. Die
Kennlinien werden nacheinander jeweils zu einem konstanten I B aufgenommen. Der zu verändernde Parameter ist die Spannung UC E .
Diese Spannung ist über die Betriebsspannung UC C veränderbar.
U
C C
R
I
C
R
B
I
C
B
U
U
A U S
E IN
I
E
Abb. 175: Schaltung zur Aufnahme der Ausgangskennlinie
Aufgabe 10.8: Wie kann der Basis- I B bzw. Kollektorstrom I C ermittelt werden? Skizzieren Sie die Meßschaltung.
Die Versorgungsspannung UC C beträgt 5 V ol t . Die Eingangsspannung U E I N liegt zwischen 0 V ol t und 5 V ol t .
Aufgabe 10.9: Dimensionieren Sie den Widerstand R B so, daß der Strom nicht größer als 40 µA wird. Die Knickspan-
nung des pn-Übergangs beträgt 0.7 V . Der Kollektorstrom I C soll nicht größer als 5 mA werden. Wie groß ist
R C zu wählen?
Aufgabe 10.10: Ersetzen Sie den Transistor aus Abbildung 175 durch einen pnp-Transistor und bestimmen Sie für
diesen Transistortyp eine geeignete Eingangs- und Versorgungsspannung (U E I N , UC C ).
137
10.1.2.6. Der Transistor als Schalter
Mit den für den Basiswiderstand R B und Kollektorwiderstand R C errechneten Werten soll jetzt mit einem npn-Transistor ein Inverter
aufgebaut werden. Zur Anzeige der Funktion wird eine LED verwendet. Der pn-Übergang besitzt die Knickspannung UK .
Aufgabe 10.11: Zeichnen Sie den Schaltplan mit allen Anschlüssen.
Aufgabe 10.12: Leiten Sie die invertierende Wirkung mittels Maschengleichung her.
Kontrollieren Sie die Ergebnisse der Berechnungen mit PSPICE. Als Transistor kann z. B. der Q2N2222 aus der Bibliothek eval.slb
dienen.
Aufgabe 10.13: Geben Sie die Transistorschaltung im SCHEMATIC ein. Als Widerstandswerte für den Basiswider-
stand R B und Kollektorwiderstand R C benutzen Sie die berechneten Werte. Fügen Sie der Versuchsvorbereitung einen Ausdruck des SCHEMATIC (alternativ Netzliste) hinzu.
Zur Simulation ist es sinnvoll, als Eingangsspannung eine Dreieckspannung zu verwenden. Letztlich will man sehen, wie mit steigender
Eingangsspannung die Ausgangsspannung sinkt. SPICE bietet dafür die Möglichkeit einer DC Sweep Analyse. Aktivieren Sie im Menü
Analysis den Punkt Setup und schalten Sie die DC Sweep Analyse ein. Durch klick auf DC Sweep öffnet sich ein Fenster, in dem die
Spannungsquelle über die Angabe des Namens ausgewählt wird. Außerdem muß der Anfangswert, die Schrittweite und der Endwert
der Spannung eingegeben werden. Die weiteren Analyse-Schritte sind wie beim ersten Versuch.
Aufgabe 10.14: Drucken Sie das Simulationsergebnis mit Eingangsspannung und Ausgangsspannung aus.
10.1.3. Der Operationsverstärker in der analogen Anwendung
Analoge Integrierte Schaltkreise5 werden hauptsächlich für alle Arten von Verstärkern eingesetzt. Ein sehr breites Anwendungsfeld analoger ICs sind Operationsverstärker für die Meß- und Regelungstechnik. Die ICs können Bipolar- und MOSFET-Transistoren enthalten.
Außerdem werden weitere Bauteile wie Dioden, Widerstände und Kondensatoren auf den Chips integriert.
10.1.3.1. Funktionsweise eines Operationsverstärkers
Der Operationsverstärker (OP) unterscheidet sich im Grunde nicht von einem Verstärker mit Bipolartransistoren. Wie an den Kennlinienfeldern der Transistoren zu erkennen, sind Transistoren keine idealen Verstärker, da sie nur näherungsweise eine proportionale
Verstärkung des Eingangssignals ermöglichen. Wie Abbildung 176 zeigt, besteht ein Operationsverstärker aus vielen Transistoren. Die
Nachteile, die ein einzelner Transistor hat, werden durch geschickte Verschaltung mehrerer Transistoren vermindert.
5
IC = integrated circuit
138
Representative Circuit Diagram
(One–Fourth of Circuit Shown)
Output
Bias Circuitry
Common to Four
Amplifiers
VCC
Q15
Q16
Q22
Q14
Q13
40 k
Q19
5.0 pF
Q12
Q24
25
Q23
+
Q20
Q18
Inputs
Q11
Q9
–
Q21
Q17
Q6
Q2
Q25
Q7
Q5
Q1
Q8
Q3
Q4
2.4 k
Q10
Q26
2.0 k
VEE/Gnd
Abb. 176: Schaltbild des Operationsverstärkers LM324
Operationsverstärker besitzen folgende Eigenschaften:
• eine hohe Spannungsverstärkung
• einen hohen Eingangswiderstand
• einen niedrigen Ausgangswiderstand
Solche hochwertigen Verstärker wurden früher in Analogrechnern für mathematische Operationen wie Addition, (De)Logarithmierung
und Integration eingesetzt. Daher stammt die Bezeichnung Operationsverstärker. Ersichtlich eignen sich Analogrechner vor allem zur
Lösung von Differentialgleichungen. Sogar nichtlineare Differentialgleichungen, die in den seltensten Fällen analytisch gelöst werden
können, sind mit Analogrechnern zu berechnen.
Heute sind Operationsverstärker in großer Vielfalt als integrierte Schaltungen erhältlich und unterscheiden sich in Größe und Preis
kaum von Einzeltransistoren. Aufgrund ihrer in vieler Hinsicht nahezu idealen Eigenschaften ist ihr Einsatz viel einfacher als der
von Einzeltransistoren. Deshalb hat der Operationsverstärker den Einzeltransistor aus weiten Teilen der linearen Schaltungstechnik
verdrängt.
UD
UP
UN
+
+
U
-
U-
+
+
-
UA
Abb. 177: Schaltsymbol des Operationsverstärkers
Die Eingangsstufe ist hier als Differenzverstärker ausgeführt. Bei niedrigen Frequenzen ist die Ausgangsspannung UA in Phase mit der
Eingangsspannungsdifferenz U D = U P − UN .
Man bezeichnet den P-Eingang als den nicht-invertierenden Eingang und kennzeichnet ihn im Schaltsymbol mit einem Plus-Zeichen
(Abbildung 177). Der N-Eingang ist der Invertierende und wird mit einem Minus-Zeichen gekennzeichnet.
139
Damit der OP sowohl positive, als auch negative Spannungen U D verstärken kann, wird er mit symmetrischer Versorgungsspannung
(z. B. U + = +12 V , U − = −12 V ) betrieben. Wird der OP lediglich als Komparator eingesetzt, kann er auch mit einer asymmetrischen
Versorgungsspannung betrieben werden (z. B. U + = +5 V , U − = 0 V ). In Schaltbildern werden zur besseren Übersichtlichkeit meist
nur die Eingangs- und Ausgangs-Anschlüsse eingezeichnet.
Die Ausgangsspannung ist im Bereich UA min < UA < UA max näherungsweise linear von U D abhängig. Die Differenzverstärkung A D
liegt in der Größenordnung von 104 – 105 . Sie wird auch als offene Verstärkung, d.h. Verstärkung ohne Gegenkopplung („open loop
gain“) bezeichnet.
Die Rückkopplung des Ausgangs auf den Eingang führt auf eine Übertragungsfunktion und einen in den Grenzen der Versorgungsspannung einstellbaren Verstärkungsfaktor A ≤ A D . Die Spannungsdifferenz U D wird durch die Rückkopplung stets auf ungefähr 0 V
gehalten.
Die Aussteuergrenzen UA max und UA min liegen je nach OP bis zu 3 V unter der positiven bzw. negativen Betriebsspannung. Wenn die
Bereichsgrenzen erreicht sind, steigt UA bei einer weiteren Vergrößerung von U D nicht weiter an, d.h. der Verstärker wird übersteuert.
Zum Aufbau eines invertierenden 10:1 Verstärkers (Abbildung 178) soll ein idealer Operationsverstärker verwendet werden.
Aufgabe 10.15: Nennen Sie die drei Eigenschaften des idealen Operationsverstärkers. Welche weiteren Eigenschaften
werden daraus abgeleitet?
Abb. 178: Grundschaltung zur Spannungsverstärkung
Zur Herleitung der Gleichungen ist das Zeichnen der Schaltung und das Einzeichnen aller Maschenumläufe, sowie
der Stromknoten erforderlich.
Aufgabe 10.16: Dimensionieren Sie den Widerstand R 2 , so daß sich für R 1 = 10 kΩ eine Verstärkung von 10:1 ergibt.
Welche Ausgangsspannung UA erhält man für U E = +10 mV ?
Simulieren Sie den invertierenden 10:1 Verstärker mit PSPICE. Als Operationsverstärker können Sie den LM324 aus der Bibliothek
eval.slb verwenden. Alternativ können Sie auch den OPAMP aus der Bibliothek analog.slb verwenden.
Aufgabe 10.17: Geben Sie die Operationsverstärkerschaltung im SCHEMATIC ein. Als Widerstandswerte benutzen
Sie die berechneten Werte. Die Versorgungsspannung des Operationsverstärkers beträgt ±15 V . Fügen Sie der
Versuchsausarbeitung einen Ausdruck des SCHEMATIC (alternativ Netzliste) hinzu.
Zur Simulation können Sie z. B. eine Rechteckspannung verwenden.
Aufgabe 10.18: Drucken Sie das Simulationsergebnis mit Eingangsspannung und Ausgangsspannung aus. Einmal
soll die Eingangsspannung U E = ±10 mV sein. Das bedeutet, die Spannung soll Werte zwischen −10 mV und
+10 mV annehmen können. Für eine zweite Simulation soll U E = ±5 V sein.
Aufgabe 10.19: Ersetzen Sie den Widerstand im Rückkopplungszweig durch eine Diode. Leiten Sie mittels Maschen-
gleichung und Knotengleichung die Funktion der Beschaltung ab. Die Diode modellieren Sie als physikalisch
ideale Diode. Welche Funktion führt die Schaltung aus?
Aufgabe 10.20: Nun soll im Rückkopplungszweig ein Kondensator plaziert werden. Leiten Sie die Gleichungen ab.
Welche Funktion führt die Schaltung aus? Was passiert, wenn der Eingangsspannung eine Gleichspannung
überlagert ist?
140
Aufgabe 10.21: Erweitern Sie das Schaltbild aus Abbildung 178 um einen weiteren Eingang und einen Widerstand,
so daß ein „invertierender Addierer” entsteht (UA = −(U E1 + U E2 )). Geben Sie geeignete Werte für die drei
Widerstände an.
10.1.3.2. Der Operationsverstärker als Komparator
Der Operationsverstärker kann auch als Komparator eingesetzt werden. Während am Eingang des Differenzverstärkers ein analoges
Signal anliegt, erscheint am Ausgang lediglich eines der zwei Signale UA max , UA min . Ein Komparator wird z. B. zur Analog-DigitalWandlung eingesetzt. Abbildung 179 zeigt die Schaltung eines Komparators.
Abb. 179: Komparatorschaltung
10.2. Versuchsdurchführung
10.2.1. Benötigtes Material
Geräte
1
1
1
1
2
Labornetzteil
Funktionsgenerator
Oszilloskop
Steckbrett
Vielfachmeßgeräte
Bauteile
1
1
1
1
2
1
1
1
1
1
1
1
Widerstand, 100 Ω
Widerstand, 220 Ω
Widerstand, 1 kΩ
Widerstand, 10 kΩ
Widerstände, 39 kΩ
Widerstand, 100 kΩ
Kondensator, 100 nF
Diode, 1N4148
Diode, BAT 45
LED, rot
npn-Transistor, BC546
Operationsverstärker, LM324
10.2.2. Aufnahme von Diodenkennlinien
Aufgabe 10.22: Bei einer Diode ist es wichtig, sie richtig einzusetzen. Wie können Sie an der Kennlinie erkennen, ob
Sie die Diode korrekt gepolt haben? Wie ist die Kathode gekennzeichnet?
Bauen Sie die im Theorieteil entwickelte Schaltung auf.
141
Aufgabe 10.23: Nehmen Sie die Diodenkennlinie der Dioden 1N4148 und BAT 45 mittels zweier Vielfachmeßgeräte
auf. Fünf Meßwerten sollten bei günstiger Wahl der Spannung ausreichen, um eine aussagekräftige Kennlinie
(Knickspannung) zu erhalten.
Zur Aufnahme von Kennlinien mit dem Oszilloskop wird das entsprechende Bauteil mit einer Dreieckspannung betrieben.
Aufgabe 10.24: Messen Sie jetzt die Diodenkennlinien mit Hilfe des Oszilloskops. Welche Fehler haben Sie dabei
gemacht?
10.2.3. Aufnahme der Transistor-Ausgangskennlinie
Bauen Sie die in der Versuchsvorbereitung beschriebene Transistorschaltung auf. Messen Sie den Kollektorstrom und Kollektorspannung mit Hilfe zweier Vielfachmeßgeräte.
Aufgabe 10.25: Verändern Sie die Eingangsspannung U E I N . Welche Änderungen sind zu sehen?
Aufgabe 10.26: Nehmen Sie zwei Kennlinien auf Millimeterpapier auf. Bezeichnen Sie das Koordinatensystem und
den Scharparameter.
10.2.4. Transistor als Schalter
Bauen Sie die in der Versuchsvorbereitung beschriebene Schaltung auf. Als Transistoren stehen der BC546, BC547 oder BC548 zur
Verfügung. Die unterschiedlichen Eigenschaften sind dem Datenblatt zu entnehmen und haben auf diesen Versuch keinen Einfluß.
Widerstände gibt es nur in einem bestimmten Raster. Der in der Versuchsvorbereitung berechnete Widerstandswert ist abzurunden.
Aufgabe 10.27: Messen Sie UC E und I C für U E I N = 0V und U E I N = 5V .
Die Wirkung des Inverters mit einem Bipolartransistor sollte nun klar geworden sein.
Aufgabe 10.28: Welchen Nachteil besitzt diese Schaltung z. B. bei Verwendung in einem Logikbaustein?
142
10.2.5. Rückgekoppelte Operationsverstärkerschaltungen
Der verwendete Operationsverstärker LM324 hat folgendes Anschlußbild:
Abb. 180: Operationsverstärker LM324
Beachten Sie:
• Die Versorgungsspannung muß atypisch an Pin 4 und 11 angeschlossen werden.
• Alle 4 Operationsverstärker sind gleich.
Als Bauelemente für R 1 bzw. R 2 stehen Ihnen zwei 39 kΩ Widerstände zur Verfügung.
Aufgabe 10.29: Bauen Sie den invertierenden Verstärker aus den Widerständen und dem Operationsverstärker auf.
Schließen Sie den Funktionsgenerator (Amplitude z. B. 1 V ol t , Frequenz z. B. 100 Hz ) an und nehmen Sie mit
Hilfe des Oszilloskops das Eingangs- und Ausgangssignal Ihrer Schaltung auf.
Als Bauelemente für R 1 bzw. R 2 stehen Ihnen nun die Widerstände zur Verfügung, die Sie im Theorieteil für den invertierenden 10:1
Verstärker berechnet haben.
Aufgabe 10.30: Überprüfen Sie den Verstärkungsfaktor mittels Messung. Skizzieren Sie die mit dem Oszilloskop
aufgenommenen Schirmbilder.
Aufgabe 10.31: Ersetzen Sie den Widerstand im Rückkopplungszweig durch eine Diode (BAT 45). Der Eingangswi-
derstand beträgt 10 kΩ. Skizzieren Sie das Schirmbild.
Aufgabe 10.32: Setzen Sie nun den Kondensator (100 nF) ein. Der Eingangswiderstand beträgt 10 kΩ. Plazieren
Sie parallel zum Kondensator einen 39 kΩ Widerstand. Welche Funktion erfüllt der Widerstand? Welches
Schirmbild ergibt sich ohne den Widerstand? Welche Phasenbeziehung besteht zwischen dem Eingangssignal
und dem Ausgangssignal? Skizzieren Sie das Schirmbild.
10.2.6. Der Operationsverstärker als Komparator
Bauen Sie die im Theorieteil betrachtete Schaltung auf. Um das Verhalten beurteilen zu können wird die Ausgangsspannung über der
Eingangsspannung aufgetragen (XY-Betrieb). Eine solche Funktion wird als Übertragungskennlinie bezeichnet.
Aufgabe 10.33: Verifizieren Sie das Verhalten mittels einer Messung. Ergibt sich der theoretische Verlauf der Über-
tragungskennlinie?
10.3. Versuchsausarbeitung
Überprüfen Sie:
1. Sind alle Skizzen beschriftet?
2. Sind alle Fragen beantwortet?
143
10.3.1. Fragen
Aufgabe 10.34: Welche Bezeichnung beschreibt das Verhalten des Kondensators im Rückkopplungszweig des Opera-
tionsverstärkers. Worin besteht der Vorteil/Nachteil gegenüber einem passiven RC-Glied?
Aufgabe 10.35: Skizzieren Sie eine Schaltung, mit der Eingangssignale multipliziert werden könnnen. Als Bauteile
stehen Ihnen Operationsverstärker, Dioden und Widerstände zur Verfügung.
Kontrollfragen
• Skizzieren Sie einen Inverter mit einem Bipolartransistor. Leiten Sie die invertierende Wirkung mittels Maschengleichung her.
• Zeichnen Sie eine Schaltung, mit der Signale multipliziert werden können. Die einzelnen Operationen können Sie in einem
Blockschaltbild beschreiben.
• Welche drei Eigenschaften besitzt ein idealer Operationsverstärker? Welche Eigenschaften lassen sich daraus ableiten?
• Zeichnen Sie die Beschaltung eines Operationsverstärkers, die einen invertierenden Delogarithmierer realisiert. Leiten Sie die
Funktion aus den Maschengleichungen und Knotengleichungen ab.
144
Kapitel 11
Feldeffekttransistoren und Logik-Familien
11.1. Versuchsvorbereitung
Nach Erläuterung des Feldeffekts werden in diesem Versuch Schaltungen mit Feldeffekttransistoren vorgestellt. Außerdem wird ein
Überblick über die Entwicklung und Verwendung der gebräuchlichen Logikfamilien gegeben. Nach Einführung von Kenngrößen werden
die Eigenschaften von TTL- und CMOS-Schaltkreisen gegenübergestellt.
11.1.1. Der Feldeffekt
Die Idee, mit Hilfe eines Feldeffekts ein elektronisch steuerbares Bauteil zu schaffen, ist schon sehr alt.1 Sie ist jedoch erst nach dem
Aufbau einer hochentwickelten Halbleiter-Technologie durchführbar geworden.
Betrachtet wird die Anordnung aus Abbildung 181, die aus zwei metallischen Streifen mit dünner isolierender Zwischenlage besteht.
Wenn an den beiden metallischen Streifen die als zwei Kondensatorplatten aufzufassen sind, eine Gleichspannung U anliegt, so
werden sich entsprechend der Kapazität C und der Spannung U auf den Platten gegensätzliche elektrische Ladungsträger mit der
Ladung Q = C ·U ansammeln. Bei der gezeichneten Spannungspolarität werden auf dem oberen Streifen Elektronen verdrängt und auf
dem untereren Streifen Elektronen angehäuft. Das bedeutet, daß unten die Menge an freien Ladungsträgern vergrößert wird. Im Prinzip
sollte daher der Widerstand des unteren Streifens durch die Größe der Ladung Q und damit auch durch die Spannung U zu steuern
sein. Berechnungen ergeben, daß man pro Volt eine zusätzliche Ladungsträgerkonzentration von etwa 1014 pro Kubikzentimeter erhält.
Messungen der Konzentration an freien Ladungsträgern in Metallen führen auf etwa 1022 · cm−3 . Die Anreicherung an Elektronen
in dem Metall ist daher unerheblich. Die Verhältnisse lassen sich aber ändern, wenn man statt Metallen Stoffe mit weniger freien
Ladungsträgern heranzieht. Halbleiter haben etwa Konzentrationen von 1013 · cm−3 . In Halbleitern wird eine Ladungsvermehrung oder
Verminderung zur Realisierung eines veränderbaren Widerstands technisch nutzbar.
1
J.E. Lilienfeld 1925, O. Heil 1934
145
Abb. 181: Prinzip des spannungsgesteuerten Widerstands
11.1.1.1. Prinzip des MOSFET
Abbildung 182 zeigt das Prinzip eines planaren Feldeffekttransistors (MOSFET2 ).
Abb. 182: Prinzip eines Feldeffekttransistors
Durch die positive Gate-Spannung UGS werden negative Ladungen im Kanal (Bereich zwischen Drain und Source) induziert. Wird keine
Drain-Spannung U DS angelegt, so wird die Verteilung der induzierten negativen Ladung gleichmäßig über die Kanallänge erfolgen. Ist
eine Drain-Spannung U DS vorhanden, so wird ein Strom durch den Kanal fließen.
Die Ausdehnung der Kanalzone ist in Abbildung 183 verdeutlicht. Feldeffekttransistoren besitzen einen sogenannten Bulk-Anschluß.
In Abbildung 183 ist der Bulk an Source angeschlossen. Es gibt aber auch Feldeffekttransistoren, wo dieser Anschluß von außen
zugänglich ist.
2
Metal-Oxide-Semiconductor-Field-Effect-Transistor
146
Abb. 183: Ausdehnung der Kanalzone
In Abbildung 184 ist die Eingangskennlinie I DS = f (UGS ) abgebildet. Bei MOSFETs gibt es neben der Unterscheidung in n-Kanal
und p-Kanal noch eine Differenzierung in Anreicherungstyp und Verarmungstyp. Wegen des positiven Vorzeichens der anfänglichen
Ladungsträger im Kanalbereich ist der Transistor für Steuerspannungen UGS bis zur Größe U T H 3 gesperrt. Will man ihn leitend machen,
muß man den Kanalbereich mit negativen Ladungstypen anreichern, weshalb man diesen Typ Anreicherungstyp nennt. Verwendet man
im Kanalbereich negative Ladungsträger (technologisch durch Ionenimplantation erzeugt), so kann U T H auch negativ werden. Dann
ist ein Transistor entstanden, der im Ruhezustand Strom leitet. Man kann diesen Transistor mit einer negativen Gatespannung sperren
bzw. dadurch eine Verarmung an Ladungsträgern erzwingen, weshalb dieser Typ auch Verarmungstyp genannt wird.
Abb. 184: Eingangskennlinie
Aufgabe 11.1: Erläutern Sie die Funktion des Bulk-Anschlusses. Welche Spannung kann damit verändert werden?
Aufgabe 11.2: Zeichnen Sie eine Schaltung zur Aufnahme der Eingangskennlinie. Dabei stehen zwei Vielfachmeßge-
räte zur Verfügung.
Aufgabe 11.3: Zeichnen Sie eine Schaltung zur Aufnahme der Kennlinie mit dem Oszilloskop. Kennzeichnen Sie die
Anschlüsse. In welchem Betriebsmodus muß das Oszilloskop betrieben werden?
Das Ausgangskennlinienfeld eines MOSFETs ist in Abbildung 185 dargestellt.
3
Die Bezeichnung TH steht für Threshold.
147
Abb. 185: Kennlinienfeld
Aufgabe 11.4: Zeichnen Sie eine Schaltung zur Aufnahme der Ausgangskennlinie.
Bei MOSFETs wird zwischen drei Betriebsbereichen unterschieden.
Diese Betriebsbereiche sind für einen n-Kanal MOSFET in folgender Tabelle zusammengestellt. Die Bezeichnung der Betriebsbereiche
sind die in der Literatur gebräuchlichen.
I DS =
Betriebsbereich
Sperrbereich (Cutoff)
Anlaufbereich
(Widerstandsbereich, Nonsaturation)
Abschnürbereich (Saturation)
UGS - U DS
UGS < U T H
0
K((UGS − U T H ) · U DS −
K
2
· (UGS − U T H )2
2
U DS
2
)
UGS > U T H
UGS − U T H ≥ U DS
UGS > U T H
UGS − U T H ≤ U DS
Erläuterungen:
• U T H bezeichnet die Threshold-Spannung
• K = KN′ · WL
W und L beschreiben die Geometrie (Breite und Länge) des Kanals.
µ ε ε
KN′ = n d0 r,o x , dabei ist µn die Beweglichkeit, ε0 die Dielektrizitätskonstante des Vakuums, ε r,ox die relative Dielektrizitätsox
konstante und dox die Oxid-Schichtdicke.
In dem ZIP-Archiv befindet sich ein Programm MOSFET, mit dem die Auswirkungen bei Variation der Parameter auf die Kennlinien
simuliert werden kann.
Insgesamt unterscheidet man sechs verschiedene Typen von Feldeffekttransistoren. Die Schaltsymbole und die entsprechenden Kennlinien, sowie Anwendungsgebiete sind in Abbildung 186 zusammengefaßt. Während beim MOSFET das Gate durch eine Oxid-Schicht
(SiO2 ) vom Kanal isoliert ist, wird beim Sperrschicht-FET ein pn-Übergang eingesetzt.
148
Abb. 186: Übersicht gebräuchlicher Feldeffekttransistoren
Die Schaltgeschwindigkeit von MOSFETs hängt wesentlich von der Länge des Kanals ab. Je kürzer der Kanal ist, desto schneller sind
die in ihm befindlichen Ladungsträger (nach negativer Polung des Gates) in das Drain-Gebiet abgeflossen. Der Verwendung minimaler
Kanallängen sind natürlich technologische und schließlich auch physikalische Grenzen gesetzt. MOSFETs mit Silizium erreichen Kanallängen von wenigen Mikrometern, bei Schaltfrequenzen von 1 GHz . Bei Verwendung von GaAs4 als Substratmaterial, in dem die
Beweglichkeit der Elektronen bei Raumtemperatur etwa 5 mal größer ist als in Silizium, verläuft das Abfließen der Ladung aus dem
Kanal entsprechend schneller.
Die Schaltleistung der Feldeffekttransistoren ist von vornherein dadurch begrenzt, daß der Kanal sehr dünn ist und deshalb nur eine
geringe Stromstärke durchleiten kann. Man hat dieses Problem dadurch gelöst, daß man integrierte Schaltungen herstellt, in denen hundert und mehr kleine FETs parallel geschaltet sind. Solche Leistungs-MOSFETs können im Source-Drain-Kreis beachtliche
elektrische Leistungen über die Gate-Elektrode steuern.
11.1.1.2. Grundschaltungen mit Feldeffekttransistoren
In Analogie zu den Bipolartransistoren unterscheidet man Source-, Drain- und Gateschaltung, je nachdem, welcher Anschluß auf
konstantem Potential liegt.
Im folgenden wird die Sourceschaltung aus Abbildung 187 betrachtet. Der MOSFET ist ein n-Kanal-Anreicherungstyp.
4
Gallium Arsenid
149
Abb. 187: Inverter mit einem Widerstand
Die Sourceschaltung entspricht der Emitterschaltung bei Bipolartransistoren. Der Unterschied besteht darin, daß der Eingangswiderstand sehr hoch ist und damit der Gatestrom I GS vernachlässigbar klein ist.
Für die Schaltung aus Abbildung 187 sind folgende Werte gegeben:
• U T H = 1 V ol t
• K = 25 µA/V 2
• U x = 3 V ol t
• E = 10 V ol t
• R L = 100 kΩ
Aufgabe 11.5: Berechnen Sie den Strom I DS und die Spannung U DS bzw. U y . In welchem Betriebsbereich befindet sich
der Transistor?
Aufgabe 11.6: Die Schaltung aus Abbildung 187 realisiert einen Inverter. Welchen Vorteil hat die Schaltung gegen-
über einem Inverter mit einem Bipolartransistor?
11.1.2. Übersicht der Schaltkreisfamilien
Logische Verknüpfungen wie AND und OR können mittels mechanischer Schalter realisiert werden. Selbst NOT kann noch mit einem
Schalter und einem Widerstand realisiert werden.
Aufgabe 11.7: Zeichnen Sie einen Schaltplan für die Realisierung von AND, OR und NOT. Zur Verfügung stehen
Schalter, Widerstände, Spannungsquellen und Leuchtdioden.
Die Lebensdauer mechanischer Schalter (z. B. Relais) ist sehr begrenzt. Außerdem sind die Umschaltzeiten relativ groß. Elektronenröhren lassen durch den hohen Stromverbrauch keine hohe Integrationsdichte zu und haben ebenfalls eine sehr beschränkte
Lebensdauer. Deshalb sind Halbleiterbaulemente, wie Dioden und Transistoren, bei der Realisierung schneller logischer Verknüpfungen die erste Wahl. Im folgenden werden die schaltungstechnischen Realisierungen anhand von Grundfunktionen erläutert. Zu jeder
Schaltkreisfamilie wird der typische Leistungsverbrauch und die Gatterlaufzeit angegeben.
11.1.2.1. Schaltungstechnische Realisierung mit Bipolartransistoren
Ein einfacher Inverter in Emittergrundschaltung ist bereits im zweiten Versuch untersucht worden. Abbildung 188 zeigt eine
Widerstands-Transistor-Logik (RTL5 ) Realisierung eines NOR Gatters. Die relativ niederohmigen Basis-Vorwiderstände stellen sicher,
daß die Transistoren auch bei kleiner Stromverstärkung voll leitend werden. Daraus folgt jedoch eine niedrigere Ausgangsbelastbarkeit.
In dieser Beziehung sind die folgenden Schaltungen wesentlich besser. RTL-Schaltungen werden heute nicht mehr eingesetzt.
5
Resistor-Transistor-Logic
150
Abb. 188: RTL-NOR Gatter
Verlustleistung
Gatterlaufzeit
PV = 5 mW
t pd = 25 ns
In Abbildung 189 ist ein NAND Gatter in Dioden-Transistor-Logik (DTL) dargestellt. DTL-Schaltungen werden wegen der durch die
Sättigung der Transistoren bedingten großen Gatterlaufzeiten nicht mehr eingesetzt.
Abb. 189: DTL-NAND Gatter
Verlustleistung
Gatterlaufzeit
PV = 15 mW
t pd = 25 ns
Für Anwendungen in Geräten, in denen hohe Störimpulse auftreten, gibt es modifizierte DTL-Schaltungen, bei denen eine Zener-Diode
wie in Abbildung 190 eingesetzt wird. Zur Erhöhung der Ausgangsbelastbarkeit besitzen LSL-Schaltungen eine Gegentaktendstufe. Die
Schaltzeit wird durch den Einsatz langsamer Transistoren künstlich erhöht.
151
Abb. 190: LSL-NAND Gatter
Verlustleistung
Gatterlaufzeit
PV = 180 mW
t pd = 175 ns
Abbildung 191 zeigt ein Transistor-Transistor-Logik (TTL) NAND Gatter. TTL-Gatter arbeiten im Prinzip genauso wie DTL-Gatter. Unterschiede bestehen lediglich in der Ausführung des Dioden-Gatters und des Verstärkers.
Abb. 191: TTL-NAND Gatter
Verlustleistung
Gatterlaufzeit
PV = 10 mW
t pd = 10 ns
Bei dem TTL-Gatter in Abbildung 191 ist das Dioden-Gatter (Abbildung 189) durch den Transistor T1 mit mehreren Emitter-Eingängen
ersetzt. Offene Eingänge werden als logisch HIGH angesehen. Der Verstärker besteht bei TTL-Schaltungen aus einem AnsteuerTransistor T2 und z. B. der Totem-Pole-Schaltung.
152
Die Ausgangsstufen von TTL-Schaltkreisen können in drei verschiedenen Varianten realisiert sein:
1. Totem-Pole-Ausgang
Er besitzt sowohl gegen Versorgungsspannung, als auch gegen Masse einen Schalttransistor. Dies bewirkt, daß der Ausgangswiderstand für beide Logikpegel sehr gering ist. Genau einer der beiden Transistoren ist jeweils leitend. Das Verbinden von
Ausgängen ist verboten.
2. Tri-State-Ausgang
Er besitzt ebenso wie der Totem-Pole-Ausgang zwei Schalttransistoren, die genauso arbeiten. Es ist jedoch möglich durch ein
von außen angelegtes Signal beide Transistoren in den gesperrten Zustand zu bringen. Der Ausgang des Schaltkreises erhält
dadurch keinen logischen Pegel, sondern wird hochohmig. So ist es möglich, mehrere Ausgänge miteinander zu verbinden,
wenn sichergestellt ist, daß höchstens einer der Ausgänge zur gleichen Zeit nicht hochohmig ist.
3. Open-Collector-Ausgang
Er besteht aus einer Emitter-Grundschaltung. Der Kollektor ist direkt herausgeführt und intern nicht verschaltet. Das bedeutet,
daß der Ausgang selbst nur in der Lage ist, eine niederohmige Verbindung mit Masse herzustellen. Um einen High-Pegel zu
erreichen, muß der Ausgang über einen entsprechend dimensionierten Widerstand („pull-up Widerstand“) mit der Versorgungsspannung verbunden werden. Das erlaubt ebenfalls das Verbinden von mehreren Ausgängen, die sogar gleichzeitig aktiv sein
dürfen.
UV
GND
Abb. 192
UV
GND
Abb. 193
Aufgabe 11.8: Ordnen Sie die Schaltbilder in Abb. 192 und Abb. 193 den Ausgangsstufen zu.
Aufgabe 11.9: Warum ist das Verbinden von Totem-Pole-Ausgängen verboten?
Aufgabe 11.10: Warum ist es gut beim Totem-Pole-Ausgang für beide Logikpegel einen geringen Ausgangswiderstand
zu haben?
153
Aufgabe 11.11: Geben Sie ein Beispiel aus der Praxis an, in dem Tri-State-Ausgänge auftreten und begründen Sie
Ihre Antwort.
Aufgabe 11.12: Die Ausgänge zweier TTL-Open-Collector-Inverter werden zusammengeschaltet. Zeichnen Sie das
Schaltbild. Welche logische Funktion wird realisiert?
11.1.2.2. Schaltungstechnische Realisierung mit FETs
Eine Logikfamilie, die sich durch besonders niedrige Leistungsaufnahme auszeichnet, ist die CMOS6 -Logik. Die CMOS-Logik hat in
der praktischen Anwendung Logikgatter mit Bipolartransistoren weitgehend verdrängt. Die Schaltung eines Inverters ist in Abbildung
194 dargestellt.
UV
PMOS
NMOS
GND
Abb. 194: CMOS-Inverter
Verlustleistung (Standard)
Verlustleistung (High Speed)
Gatterlaufzeit (Standard)
Gatterlaufzeit (High Speed)
PV = 0, 3 µW /kHz
PV = 0, 5 µW /kHz
t pd = 90 ns
t pd = 10 ns
Die CMOS-Technologie benutzt als aktive Elemente Paare von NMOS- und PMOS-Transistoren. Diese werden so geschaltet, daß
beide Gate-Anschlüsse vom gleichen Signal angesteuert werden, wodurch immer genau einer leitet, und der andere sperrt.
Aufgabe 11.13: Skizzieren Sie Abb. 194 in Ihrer Versuchsvorbereitung und kennzeichnen Sie die Anschlüsse der Tran-
sistoren (Bulk, Gate, Source, Drain).
In der Schaltung werden selbstsperrende FETs verwendet. Die Source-Elektrode des n-Kanal-FETs ist an Masse, die des p-KanalFETs an die Betriebsspannung angeschlossen. Beide FETs arbeiten also in Source-Schaltung. Dabei stellt jeweils der eine Transistor
den Arbeitswiderstand für den anderen dar.
Ist die Eingangsspannung U E = 0 V ol t leitet der p-Kanal FET und der n-Kanal FET sperrt. Für U E = UV sperrt der p-Kanal FET und
der n-Kanal FET leitet.
Die Übertragungskennlinie, also die Kennlinie, die die Ausgangsspannung über der Eingangsspannung darstellt ist in Abbildung 195
dargestellt. Die gestrichelte Kurve zeigt den Stromfluß zwischen UV und GN D. Nur für einen kurzen Augenblick fließt ein Querstrom
durch beide Transistoren.
6
Complementary-Metal-Oxide-Semiconductor
154
Abb. 195: Übertragungskennlinie eines CMOS-Gatters
Die Stromaufnahme eines CMOS-Gatters setzt sich aus drei Anteilen zusammen:
• Wenn die Eingangsspannung konstant gleich Null oder gleich UV ist, fließt ein kleiner Sperrstrom im Bereich von wenigen
Mikroampere.
• Wenn das Eingangssignal seinen Zustand wechselt, fließt vorübergehend der Querstrom durch beide Transistoren.
• Der überwiegende Beitrag entsteht bei der Auf- und Entladung der Transistorkapazitäten.
Die Verlustleistung eines CMOS-Gatters kann näherungsweise mit PV ≈ C T · U D2 · f angegeben werden. Dabei ist C T die Kapazität,
U D2 die Spannung und f die Transitionshäufigkeit (Frequenz).
Das Programm INVERTER simuliert die Übertragungskennlinie und den Stromfluß von MOS-Invertern.
Aufgabe 11.14: Welche logische Funktion wird durch die Schaltung in Abb. 196 realisiert? Erstellen Sie als Zwi-
schenschritt eine Tabelle und geben Sie jeweils an, ob die Transistoren leiten oder nicht.
UV
A
T1
B
T
2
Y
T
3
T
4
GND
Abb. 196
11.1.2.3. Mechanische Realisierungsformen
Die ICs, die in diesem Praktikum verwendet werden, besitzen in der Regel ein Dual-in-line (DIL)-Gehäuse (Abb. 197). Dieses besteht
aus einem schwarzen quaderförmigen Kunststoffblock, aus dem auf den beiden langen Seiten die Anschlüsse herausgeführt und nach
unten umgebogen sind. Da diese Beinchen sehr dünn sind, verbiegen sie leicht und brechen dann ab.
Um eine eindeutige Identifizierung der Anschlüsse zu ermöglichen, befindet sich an einer der beiden kurzen Seiten eine Markierung im
Gehäuse, z. B. in Form einer Kerbe. Ausgehend von dieser Kerbe hat der nächste Anschluß im Gegenuhrzeigersinn die Nummer 1, der
übernächste die Nummer 2 usw.. Der Wechsel der Seite ändert nichts an dieser Regel. Die Richtung des Typaufdrucks ist prinzipiell
ohne Bedeutung, meistens ist bei lesbarer Schrift unten links Pin 1.
155
Abb. 197: IC DIL-Gehäuse
Bei den Bausteinen, die in diesem Praktikum verwendet werden, muß die Versorgungsspannung (UV ) fast immer an den Anschluß
mit der höchsten Nummer (also gegenüber von Pin 1) und die Masse (GND) an den Anschluß mit der halben höchsten Nummer
(also diagonal gegenüber) angeschlossen werden. Sollte eine Abweichung von dieser Regel auftreten, so wird ausdrücklich darauf
hingewiesen.
Heute werden ICs vorwiegend in SMD7 -Technik ausgeführt. Im Datenblatt für den Operationsverstärker LM324 und den CMOS-Inverter
4007 ist die Abbildung eines SMD-Bausteins zu finden.
Aufgabe 11.15: Welche Vorteile haben SMD-Gehäuse gegenüber DIL-Gehäusen?
.
11.1.3. Weitere Kenngrößen von Logikfamilien
11.1.3.1. Vergleich TTL - CMOS
Abbildung 198 stellt die technischen Merkmale von TTL- und CMOS-Schaltkreisen gegenüber.
Eigenschaft
Bezeichnung
Betriebsspannung UV
Eingangspegel:
HIGH
LOW
Ausgangspegel:
HIGH
LOW
TTL
CMOS
74xx oder 74xxx
4.75-5.25 V
4xxx oder 4xxxx
A-Serie: 3-12 V
B-Serie: 3-18 V
> 2.0 V
< 0.8 V
> 70% UV
< 30% UV
> 2.4 V
< 0.5 V
> 90% UV
< 10% UV
Abb. 198: Merkmale von TTL und CMOS-Schaltkreisen
Man beachte:
• TTL-Bausteine benötigen eine genaue Versorgungsspannung.
• Pegel im verbotenen Bereich (TTL: 0.8 - 2.0 V) sollten nur in steilen Flanken durchlaufen werden.
• Wenn Eingangspegel und Ausgangslast stimmen garantiert der Baustein den Ausgangspegel.
11.1.3.2. Statischer Störspannungsabstand
Der Störspannungsabstand einer Schaltkreisfamilie kennzeichnet die Sicherheit der Signalübertragung gegenüber Störspannungen
und ist eine wichtige Eigenschaft der Schaltkreisfamilie. Er ist die Spannungsdifferenz zwischen garantierter Ausgangsspannung und
geforderter Eingangsspannung desselben logischen Pegels. Dies nennt man auch die Toleranz der Logikpegel, d.h. ein in gewissen
Grenzen veränderter Logikpegel wird immer noch sicher erkannt.
7
Surface Mount Device
156
Abb. 199: Störspannungsabstände
11.1.3.3. Grundbegriffe des Zeitverhaltens
Raise Time:
Mit tr wird die Zeit bezeichnet, die ein Signalimpuls benötigt, um vom 10%-Pegel bis zum 90%-Pegel seiner Differenzspannung
zu steigen.
(r steht für engl.:„raise“ = ansteigen.)
F all Time:
Mit tf wird die Zeit bezeichnet, die ein Signalimpuls benötigt, um vom 90%-Pegel bis auf den 10%-Pegel seiner Differenzspannung zu fallen.
(f steht für eng.:„fall“ = fallen.)
Propagation Delay Time:
Mit tpdHL wird die Zeit bezeichnet, die zwischen dem 50%-Pegel einer Signaleingangsflanke und dem 50%-Pegel seiner abfallenden Signalausgangsflanke liegt.
( t pdH L = „propagation delay time, high-to-low-level output“)
tpdLH analog t pdH L , aber steigende Flanke am Ausgang.
tpd := 12 (t pdH L + t pd LH ).
Abbildung 200 zeigt die Definition der Zeiten in einem sogenannten Zeitdiagramm8 .
Eingangssignal
t pdLH
t pdHL
Ausgangssignal
tr
t
f
Abb. 200: Zeitverzögerungen
8
eng.: timing diagram
157
Diese Zeiten sind entscheidend für die Geschwindigkeit einer Schaltung und deshalb in der Praxis ein wichtiges Kriterium zur Auswahl
einer Schaltkreisfamilie.
Aufgabe 11.16: Zeichnen Sie einen Schaltplan (Angabe aller PIN-Nummern) zur Messung des Zeitverhaltens eines
Inverters. Die PIN-Belegung des CMOS-Inverters 4007 ist dem Datenblatt im Anhang zu entnehmen.
11.2. Versuchsdurchführung
11.2.1. Benötigtes Material
Geräte
1
1
1
1
2
Labornetzteil
Funktionsgenerator
Oszilloskop
Steckbrett
Vielfachmeßgeräte
Bauteile
1
1
1
1
Feldeffekttransistor, BUZ10
CMOS-Baustein, 4007
Widerstand, 1 kΩ
Widerstand, 100 Ω
Lassen Sie sich Zeit für einen sorgfältigen Aufbau der Schaltungen. Kontrollieren Sie alle Anschlüsse, bevor Sie
die Versorgungsspannung anschließen. Achten Sie auf den korrekten Anschluß der Spannungsversorgungen. Eine
Verpolung führt zur Zerstörung der Bausteine.
Ferner ist zu beachten:
• Die Versorgungsspannung beträgt +5 V .
• Die Ausgangsspannung am Funktionsgenerator ist so einzustellen, daß 0 V nicht unter- und +5 V nicht überschritten wird.
11.2.2. Aufnahme der Kennlinien
Zur Aufnahme von Kennlinien mit dem Oszilloskop wird das entsprechende Bauteil mit einer Dreieckspannung betrieben.
Aufgabe 11.17: Nehmen Sie die Eingangs- und Ausgangskennlinie eines FETs mittels Vielfachmeßgerät auf. Der
Drain-Widerstand beträgt 1 kΩ.
Aufgabe 11.18: Nehmen Sie die Eingangs- und Ausgangskennlinie eines FETs mittels Funktionsgenerator und Oszil-
loskop auf. Der Drain-Widerstand beträgt 1 kΩ. Der Source-Widerstand beträgt 100 Ω. Welcher systematische
Fehler wird bei den Messungen gemacht?
158
11.2.3. Zeitverhalten
Im folgenden sollen die Verzögerungszeiten des CMOS-Inverters gemessen werden.
Bauen Sie die Schaltung aus Abbildung 201 auf.
UV =+5 V
14
CH1
13 CH2
6
8
7
Iq
100Ω
GND
Abb. 201: CMOS-Inverter
Der Funktionsgenerator soll ein Rechtecksignal zwischen 0 V und 5 V mit einer Frequenz von 500 kHz ausgeben. Zur Beurteilung Ihrer Messung sollen die Meßwerte mit den Werten aus dem Datenblatt verglichen werden. Die Tastköpfe besitzen eine Kapazität
von ungefähr 16 pF .
Aufgabe 11.19: Ermitteln Sie am Ausgang die Werte der Zeiten t r und t f . Eine einfache Möglichkeit zwischen t r und
t f zu wechseln, besteht in der Änderung der Trigger-Flanke. Vergleichen Sie die Meßwerte mit den Meßwerten
im Datenblatt. Welche Fehler haben Sie bei der Messung gemacht.
Aufgabe 11.20: Ermitteln Sie die Signallaufzeiten t pdH L , t pd LH und t pd .
11.2.3.1. Übertragungskennlinie des CMOS-Inverters
Verwenden Sie die Schaltung aus dem vorherigen Teil.
Stellen Sie am Funktionsgenerator eine Dreieckspannung zwischen 0 V und 5 V mit einer Frequenz von z. B. 5 kHz ein. Für
eine zweite Messung erhöhen Sie die Frequenz auf 500 kHz .
Stellen Sie das Oszilloskop folgendermaßen ein:
• XY-Modus
• Vertikalablenkung für beide Kanäle: 1 V/cm.
Aufgabe 11.21: Oszillographieren Sie die Übertragungskennlinien des Inverters 4007 und fertigen Sie eine Skizze
an.
11.2.3.2. Stromaufnahme
Jetzt soll festgestellt werden, wann und wieviel Strom durch die Transistoren des CMOS-Inverters fließt. Oszillographieren Sie den
Verlauf des Stroms I q . Stellen Sie am Oszilloskop eine Zeitbasis von 100ns/Div ein. Das Eingangssignal (Rechteckspannung)
und der zugehörige Strom I q sollen gemeinsam in einem Diagramm zu sehen sein.
Aufgabe 11.22: Skizzieren Sie die Anzeige des Oszilloskops.
159
11.3. Versuchsausarbeitung
Überprüfen Sie:
1. Sind alle Skizzen beschriftet?
2. Sind alle Fragen beantwortet?
11.3.1. Fragen
Aufgabe 11.23: Begründen Sie, warum bei TTL-Gattern bei logisch LOW am Eingang ein Strom fließt. Welches Vor-
zeichen hat der Strom? Erläutern Sie diesen Sachverhalt anhand einer Skizze.
Aufgabe 11.24: Ist das Zusammenschalten von Eingängen bei CMOS-Gattern erlaubt?
Aufgabe 11.25: Ist das Zusammenschalten von Ausgängen bei CMOS-Gattern erlaubt?
Aufgabe 11.26: Bestimmen Sie, ob es sich bei dem Feldeffekttransistor BUZ10 um einen Anreicherungs- oder Verar-
mungstyp handelt.
Aufgabe 11.27: Bestimmen Sie die Threshold-Spannung U T H und den Technologieparameter K .
Kontrollfragen
• Skizzieren Sie den Aufbau eines Feldeffekttransistors. Erläutern Sie den Feldeffekt.
• Was bedeuten die Abkürzungen RTL, DTL und TTL?
• Was bedeuten die Abkürzungen MOSFET und CMOS?
• Zeichnen Sie einen Inverter mit einem Feldeffekttransistor. Bei dem Feldeffekttransistor handelt es sich um einen n-Kanal
Anreicherungstyp. Welchen Nachteil besitzt diese Schaltung?
• Leiten Sie die invertierende Wirkung obiger Schaltung über die Maschengleichungen her.
• Skizzieren Sie einen CMOS-Inverter. Bezeichnen Sie die Anschlüsse Gate, Drain und Source.
• Welche Zeiten haben Sie beim CMOS-Inverter gemessen?
160
Kapitel 12
AD/DA-Wandler
12.1. Versuchsvorbereitung
Nach einer kurzen Einführung in die Signalverarbeitung werden die Grundlagen von AD/DA-Wandlern erläutert. Nach Vorstellung und
Vergleich verschiedener Verfahren zur Wandlung wird ein Verfahren zur AD-Wandlung berechnet, mit PSPICE simuliert und in der
Versuchsdurchführung aufgebaut und ausgemessen. Ebenso wird ein einfaches Verfahren der DA-Wandlung vorgestellt, berechnet
und aufgebaut.
12.1.1. Einführung in die Signalverarbeitung
Um physikalische Größen, wie beispielsweise Druck, Drehmoment, Längenänderung, Temperatur, meßtechnisch erfassen zu können,
werden Sensoren eingesetzt. Sensoren wandeln physikalische Meßgrößen in elektrische Größen um und stellen das elektrische Signal
häufig in Form einer Spannung oder eines elektrischen Widerstands zur Verfügung. Die Auswertung und Verarbeitung lassen sich aus
Gründen der Genauigkeit, der Störsicherheit, Langzeitstabilität und auch der geringeren Kosten wegen am besten mit digitalen Meßund Datenverarbeitungssystemen realisieren. Die Nachteile der digitalen Signalverarbeitung sind die Abtastung und Quantisierung der
Signalwerte und die Verzögerung. Echzeitfähige Systeme setzen in der Regel spezielle Hardware voraus.
161
Die analogen Sensorsignale werden zunächst in eine digitale Darstellung umgesetzt. Abbildung 202 zeigt das Blockschaltbild eines
solchen Systems.
Abb. 202: Prinzip der digitalen Signalverarbeitung
Das vom Sensor zur Verfügung gestellte Signal wird mit einem Analog-Digital-Wandler1 (ADU) in eine Folge von Nullen und Einsen
gewandelt. Die Signalverarbeitung erfolgt z. B. mit FPGAs oder speziellen Signalprozessoren. Die Operationen der Signalverarbeitung
sind z. B. Filteroperationen, bei der ein Signal in der Bandbreite begrenzt wird. Der Digital-Analog-Wandler (DAU) generiert Signale für
Aktoren.
Der Analog-Digital-Wandler hat zwei Aufgaben.
• Abbildung 203 kann als eine Spannung über der Zeit interpretiert werden. Um ein digitales Signal zu erhalten, wird die Spannung
zu bestimmten Zeitpunkten aufgenommen. Dieser Vorgang wird Abtastung genannt.
Abb. 203: Abtastung
1
Im deutschen Sprachgebrauch auch Umsetzer genannt.
162
• Der zweite Vorgang bei einer Wandlung ist die Quantisierung. Darunter versteht man, wie die kontinuierliche Amplitude in einen
digitalen Code abgebildet wird. Abbildung 204 veranschaulicht diesen Vorgang.
Abb. 204: Quantisierung
12.1.1.1. Abtasttheorem
Bei der Vorstellung des Ozilloskops wurde der Begriff Aliasing eingeführt. Aliasing tritt auf, wenn z. B. ein Digitaloszilloskop die Signale
nicht schnell genug abtastet, um eine präzise Signalaufzeichnung zu ermöglichen. Abbildung 149 zeigt ein Signal, das eine niedrigere
Frequenz als das eigentliche Eingangssignal aufweist.
Abb. 205: Aliasing
Um ein Signal präzise darzustellen und Aliasing zu vermeiden, muß das Signal mit einer Frequenz abgetastet werden, die mehr als
doppelt so hoch wie die höchste Frequenz des Signals ist. Die höchste Frequenz des Signals wird durch eine Tiefpaßfilterung vor der
Abtastung bestimmt.
f max ≤
1
2
· fAbt
Diese Beziehung wird als Abtasttheorem bezeichnet und wurde von Nyquist begründet.
Ein Signal mit Frequenzkomponenten von 5 M Hz muß zum Beispiel mit mindestens 10 Millionen Abtastungen pro Sekunde abgetastet
werden.
163
Beispiele:
• Das menschliche Ohr hört Frequenzen bis 20 kH Z → Samplerate einer CD ist 44.1 kHz .
• Telefonleitungen übertragen Frequenzen bis zu 4 kHz → Telefongesellschaft tastet mit 8 kHz ab.
In Abbildung 206 ist ein sinusförmiges Signal mit einer Frequenz von 10 kHz dargestellt. Die Darstellung bezeichnet man in der
Signaltheorie als Zeitbereich. Das Signal weist nur eine Frequenzkomponente auf.
Abb. 206: Zeitbereich
Mittels der sogenannten Fast-Fourier-Transformation (FFT) kann das Signal in seine Frequenzkomponenten zerlegt werden. Abbildung
207 zeigt den Frequenzbereich des sinusförmigen Signals.
Abb. 207: Frequenzbereich
Die x-Achse ist in 2.50 kHz pro Teilung skaliert. Ausgehend vom linken Rand, der einer Frequenz von Null entspricht, stellen die vier
Teilungen eine Frequenz von 10 kHz dar (4 · 2.50 kHz = 10 kHz ). Die y-Achse ist in 10 dB pro Teilung skaliert.
Die digitale Signalverarbeitung führt viele Algorithmen im Frequenzbereich aus. Eine Einführung in die Signalverarbeitung gibt [?].
Weitere Papers zur Informationstheorie sind im Ordner papers zum 4. Versuch im ZIP-Archiv zu finden.
12.1.2. Analog-Digital-Wandler
Die Funktionseinheit, die analoge Spannungen oder Ströme in digitale Daten umsetzt, wird Analog-Digital-Wandler genannt. Abbildung
208 zeigt die Funktionsblöcke eines AD-Wandlers. Nach der Tiefpaßfilterung sorgt die Sample & Hold-Schaltung dafür, daß während
der Umsetzzeit eine konstante Eingangsspannung am AD-Wandler anliegt. Die Hersteller von Analog-Digital-Wandlern benutzen in den
Datenblättern eine Reihe von Begriffen und Kenngrößen, von denen nachfolgend einige Wichtige näher erläutert werden.
164
Abb. 208: Funktionseinheiten eines AD-Wandlers
12.1.2.1. Auflösung
Ein Analog-Digital-Wandler, der den gesamten Bereich seines analogen Eingangsspannungsbereichs in eine Anzahl 2n verschiedener
analoger Spannungswerte unterteilt, besitzt eine Auflösung von n Bit. Ein Wandler mit einer Auflösung von n Bit vergleicht die analoge Spannung an seinem Eingang mit einer Anzahl 2n von internen Teilreferenzspannungen und bildet an Hand dieses Vergleichs
das n-Bit Datenwort an seinem Ausgang. Die kleinstmögliche Änderung des analogen Spannungswertes am Eingang des Wandlers, die eine Änderung des Datenwortes am Ausgang zur Folge hat, entspricht bei einer Auflösung von n Bit dem 1/2n -ten Teil des
Eingangsspannungsbereiches. Dieser Teil wird Quant Q genannt und entspricht dem Wert der Teilreferenzspannung UQ = URE F /2n .
Ein 10-Bit-AD-Wandler mit unipolarem Eingangsspannungsbereich weist die minimale Teilreferenzspannung UQ = URE F /210 auf, die
0.09765% seines Eingangsspannungsbereichs entspricht. Bei bipolaren AD-Wandlern setzt sich der Eingangspannungsbereich aus
dem positiven und dem negativen Anteil zusammen. Bei einem 10-Bit AD-Wandler mit bipolaren Eingangsspannungsbereich, bei dem
das Datenbit mit der höchsten Wertigkeit (MSB)2 das Vorzeichen darstellt und die Polarität der Eingangsspannung bestimmt, beträgt
demnach die minimale Teilreferenzspannung UQ = 2 · URE F /210 , die 0.1953% des gesamten Eingangsspannungsbereichs entspricht.
Übliche Werte für die Auflösung von AD-Wandlern sind heutzutage 6, 8, 10, 12, 14, 16, 18, 20 und 24 Bit.
Aufgabe 12.1: Ein 8 Bit AD-Wandler hat eine Referenzspannung URE F = 5 V ol t . Wie lautet der binäre Ausgangscode
für eine Eingangsspannung von 1.2 V ol t ? Wie groß ist die Spannung, die vom LSB3 repräsentiert wird?
Berechnen Sie die Werte für unipolaren und bipolaren Eingangsspannungsbereich.
12.1.2.2. Codierung
Die Darstellung des binären Ausgangswertes erfolgt bei unipolaren AD-Wandlern, die nur einen positiven Wertebereich der analogen
Eingangsspannung umsetzen, üblicherweise im Dualcode. Bipolare AD-Wandler, die sowohl einen positiven als auch einen negativen
Wertebereich der Eingangsspannung erfassen, geben das Ergebnis am Ausgang entweder in Zweier-Komplement-Darstellung oder im
Dualcode mit Offset, also einer Verschiebung an. AD-Wandler mit sehr kurzen Umsetzzeiten stellen das Ergebnis der Umsetzung auch
im einschrittigen Gray-Code zur Verfügung.
12.1.2.3. Eingangsspannungsbereich
Der Eingangsspannungsbereich (engl.: span bzw. full scale input range, abgekürzt FSR) eines AD-Wandlers ist die Differenz zwischen
dem zulässigen Maximal- und dem zulässigen Minimalwert der analogen Eingangsspannung. Bei einem unipolaren Wandler entspricht
der Bereich dabei dem zulässigen Maximalwert der Eingangsspannung.
12.1.2.4. Umsetzzeit
Die Umsetzzeit (engl.: conversion time) ist die Zeitdauer, die vom Beginn der Umsetzung bis zur Bereitstellung des Datenwortes
am Ausgang des Umsetzers vergeht. Häufig wird in den Datenblättern auch die Umsetzrate (engl.: conversion rate) angegeben, die
dem Kehrwert der Summe der Umsetzzeit und zusätzlicher Verzögerungszeiten entspricht. Bei sehr schnellen Wandlern benutzt man
Verfahren, bei denen bereits mit einer neuen Umsetzung begonnen werden kann, bevor die vorhergehende Umsetzung beendet ist. In
der Reihe der Bearbeitung (engl.: pipelining) finden gleichzeitig mehr als eine Umsetzung statt. Obwohl dadurch die Umsetzzeit jeder
einzelnen Umsetzung nicht verkürzt wird, läßt sich jedoch die Umsetzrate vergrößern.
2
3
Most Significant Bit
Least Significant Bit
165
12.1.2.5. Quantisierung
Teilt man den kontinuierlichen Wertebereich der Amplitude des analogen Eingangssignals U E in eine endliche Anzahl m gleicher Teilbereiche (Quanten), so entspricht dem Wert der Amplitude des Signals zu einem Abtastzeitpunkt eine bestimmte Anzahl von Quanten.
Je größer die Auflösung eines AD-Wandlers, um so größer die Anzahl der Quanten und um so genauer läßt sich die Amplitude des
Signals quantisieren.
12.1.2.6. Quantisierungsfehler
Da die Amplitude des analogen Signals unendlich viele Werte annehmen kann, ergibt sich auf Grund der endlichen Anzahl m der
Quanten, in die der Wert des analogen Signals eingeteilt wird, ein unvermeidbarer Fehler, der Quantisierungsfehler FQ (engl.: quantization error) genannt wird. Ändert der Wandler den Wert des Datenwortes an seinem Ausgang jeweils bei den analogen Eingangswerten,
die einer ganzen Anzahl von Quanten entsprechen, so kann der maximale Quantisierungsfehler den Wert eines Quants aufweisen.
Je größer die Auflösung eines AD-Wandlers ist, um so kleiner ist der Wert des Quantes Q und der Wert des maximalen Quantisierungsfehlers FQmax . Ein AD-Wandler mit einer Auflösung von n Bit und der internen Referenzspannung URE F besitzt einen maximalen
Quantisierungsfehler FQmax :
FQmax = ±
Q
2
=±
URE F
2n+1
12.1.3. Verfahren der AD-Wandlung
Bei den Verfahren der AD-Wandlung unterscheidet man das Parallel-, das Kaskaden-, das Serien- und das Zählverfahren. Ein n-BitAD-Wandler, der das Parallelverfahren verwendet, bestimmt den digitalen Ausgangswert durch den Vergleich der analogen Eingangsspannung mit einer Anzahl 2n − 1 von Teilreferenzspannungen. Wandler mit dem Parallelverfahren erfordern einen großen schaltungstechnischen Aufwand und weisen eine äußerst kurze Umsetzzeit auf. Um den schaltungstechnischen Aufwand des Parallelverfahrens
zu reduzieren, läßt sich das Kaskadenverfahren verwenden. Dieses besteht dem Prinzip nach aus zwei nacheinanderfolgenden Parallelverfahren, mit denen die Datenbits der höherwertigen und der niederwertigen Dualstellen des Datenwortes getrennt ermittelt werden.
Ein n-Bit AD-Wandler, der das Serienverfahren verwendet, benötigt lediglich eine Anzahl n von Teilreferenzspannungen. Dieser Umsetzer ermittelt jede Stelle des Datenwortes seriell nacheinander, so daß für eine Umsetzung insgesamt n Umsetzschritte erforderlich
sind. Der geringere schaltungstechnische Aufwand des Serienverfahrens muß mit einer größeren Umsetzzeit im Vergleich zum Parallelverfahren erkauft werden. Wandler, die das Zählverfahren verwenden, zählen dem Prinzip nach, wie oft der Quant Q aufaddiert werden
muß, damit er den Wert der analogen Eingangsspannung aufweist. AD-Wandler mit einer Auflösung von n Bit, die dieses Zählverfahren verwenden, benötigen demnach bei dem maximalen Wert der Eingangsspannung eine maximale Anzahl von 2n an Additionen
des Quantes Q und weisen daher eine sehr große Umsetzzeit auf. Andere Wandler verwenden Zählverfahren, bei dem die Zeitdauer
gemessen wird, die die Integration einer internen Referenzspannung URE F erfordert, bis der Integrationswert der Referenzspannung
dem Wert der Eingangsspannung entspricht.
Aufgabe 12.2: Ein Digitalmultimeter soll zehn Dezimalstellen anzeigen. Welche Auflösung (Anzahl der Bits) muß der
AD-Wandler besitzen?
Aufgabe 12.3: Ein unkomprimiertes Stereo-Audiosignal in CD-Qualität sei mit 44.1 kHz abgetastet und mit 16 Bit
quantisiert. Wieviele Bytes fallen pro Sekunde an?
12.1.3.1. Abtast-Halte-Schaltung
Die Zeit, die ein AD-Wandler für die Umsetzung des analogen Spannungswertes an seinem Eingang in das zugehörige Datenwort
am Ausgang benötigt, wird Umsetzzeit genannt. Um eine fehlerfreie Umsetzung zu gewährleisten, darf die umzusetzende analoge
Spannung am Eingang des Wandlers während der Zeitdauer der Umsetzung ihren Wert nicht verändern. In Fällen, in denen sich das
analoge Signal während der Umsetzzeit ändern kann, muß dem Umsetzer eine Abtast-Halte-Schaltung, wie in Abbildung 209 zu sehen,
vorgeschaltet werden.
166
Abb. 209: Abtast- und Halteschaltung
Aufgabe 12.4: Welche Funktion führen die in Abbildung 209 dargestellten Operationsverstärkerschaltungen aus?
Wie nennt man diese Schaltungen?
Das Signal CC bezeichnet das Statussignal conversion complete. Das Signal SC bewirkt den Start einer Analog-Digital-Wandlung (start
conversion).
Aufgabe 12.5: Erläutern Sie die vollständige Funktionsweise der dargestellten Abtast-Halte-Schaltung.
12.1.3.2. AD-Wandler mit dem Parallelverfahren
Grundlage eines Wandlers nach dem Parallelverfahren ist der Komparator. Abbildung 210 zeigt einen AD-Wandler nach dem Parallelverfahren. Der Operationsverstärker wird im „single supply mode” benutzt. Die Spannung UV bzw. V + soll +5 V ol t betragen. GND
bzw. V − wird an die Masse angeschlossen.
UV
1kΩ
Ein
+
Aus
1kΩ
+
-
1kΩ
+
Aus 2
Aus
1kΩ
+
-
1
Aus
3
4
1kΩ
GND
Abb. 210: AD-Wandler nach dem Parallelverfahren
Aufgabe 12.6: Welche Referenzspannungen liegen an den vier Eingängen der Operationsverstärker?
Der Operationsverstärker vergleicht die Eingangsspannung U Ein mit diesen Referenzspannungen. Ist die Spannung am jeweiligen
Eingang größer als die Referenzspannung, so liegt am Ausgang des Operationsverstärker in etwa die Versorgungsspannung. Ist die
Spannung kleiner als die Referenzspannung, so erscheint 0 V ol t .
Nach den theoretischen Betrachtungen soll der AD-Wandler mit PSPICE simuliert werden. Folgende Überlegungen sind dafür notwendig.
Aufgabe 12.7: Welchen Verlauf sollte die Eingangsspannung haben, damit die Funktionsfähigkeit der Schaltung
nachgewiesen wird?
167
Für solche Spannungsverläufe benutzen Sie in PSPICE die Spannungsquelle VPULSE. Alternativ können Sie auch die DC Sweep
Analyse verwenden.
Die Periodendauer PER soll 1 s betragen. Die Referenzspannung beträgt 5 V ol t . Die Versorgungsspannung der Operationsverstärker
ist oben angegeben. Die Ausgänge der Operationsverstärker werden über einen 1 MΩ Widerstand nach Masse geführt.
Benutzen Sie als Operationsverstärker den OPAMP aus der Bibliothek analog.slb. Bei Benutzung des LM324 wird das
Limit der möglichen Knoten erreicht.
Aufgabe 12.8: Geben Sie den AD-Wandler im SCHEMATIC ein. Berechnen Sie die Ausgangsspannung der Operati-
onsverstärker mittels Transientenanalyse. Fügen Sie Ihrer Ausarbeitung einen Ausdruck vom SCHEMATIC
bei. Erzeugen Sie ein Diagramm mit Eingangsspannung und Ausgangsspannung aller Komparatoren.
Aufgabe 12.9: Als was für eine Codierung kann man die Ausgaben der Operationsverstärker interpretieren?
Es soll nun eine Logik entworfen werden, die die Komparatorzustände in einen 3-Bit Dualcode übersetzt.
Aufgabe 12.10: Entwerfen Sie eine Schaltung zur Umkodierung. Zur Minimierung der Ansteuergleichungen verwen-
den Sie KV-Diagramme4 .
Die oben entworfene Logik-Schaltung soll nun mit PSPICE simuliert werden. Neben analogen Schaltungen kann PSPICE auch digitale
Schaltungen simulieren. Die von Ihnen benötigten Digitalbausteine finden sich in der Bibliothek eval.slb. Der TTL-Inverter hat z. B. die
Bezeichnung 7404.
Aufgabe 12.11: Ergänzen Sie Ihren AD-Wandler um die entworfene Logik. Erzeugen Sie ein Diagramm, welches die
korrekte Funktionsweise des AD-Wandlers demonstriert.
12.1.4. Digital-Analog-Wandler
Aktoren zeigen physikalisch die umgekehrte Funktionsweise der Sensoren, da sie anhand einer vorgegebenen elektrischen Größe eine
physikalische Analogiegröße, wie Druck, Drehmoment, Längenänderung, Temperatur, an ihren Ausgängen zur Verfügung stellen. Um
Aktoren von digitalen Meß- und Datenverarbeitungssystemen ansteuern zu können, müssen daher zunächst die digitalen Ausgabedaten in elektrische Analogiegrößen wie Spannung oder Widerstand umgesetzt werden. Anhand dieser elektrischen Größen erzeugen
die Aktoren die entsprechenden physikalischen Größen. Die Funktionseinheit, die digitale Daten in analoge Spannungen umsetzt, wird
Digital-Analog-Wandler genannt.
12.1.5. Begriffe und Kenngrößen
Die Hersteller von Digital-Analog-Wandlern benutzen in den Datenblättern eine Reihe von Begriffen und Kenngrößen, von denen
nachfolgend einige wichtige näher erläutert werden.
12.1.5.1. Auflösung
Ein Digital-Analog-Wandler, der eine Anzahl von m = 2n verschiedenen analogen Spannungswerten an seinem Ausgang zur Verfügung
stellt, besitzt eine Auflösung von n Bit bzw. von dem 1/2n -ten Teil seines Ausgangsspannungsbereiches. Dieser Bruchteil entspricht
dabei dem Quant und stellt die kleinstmögliche Änderung der analogen Ausgangsspannung des Umsetzers dar, die durch einen Wechsel des Datenbits mit der geringsten Wertigkeit (LSB) hervorgerufen wird. Bei Umsetzern mit bipolarem Eingangsspannungsbereich
setzt sich dieser aus dem positiven und negativen Anteil zusammen. Ein unipolarer 10-Bit DA-Wandler weist demnach die minimale
Teilreferenzspannung UQ = URE F /210 auf, die 0.0976% des Ausgangsspannungsbereichs entspricht. Bei einem bipolaren 10-Bit DAWandler, bei dem das Bit der höchsten Wertigkeit (MSB) das Vorzeichen darstellt und die Polarität der Ausgangsspannung bestimmt,
beträgt dagegen die minimale Teilreferenzspannung UQ = 2 · URE F /210 , die 0.1953% des Ausgangsspannungsbereichs entspricht.
DA-Wandler weisen heutzutage übliche Werte für die Auflösung von 6, 8, 10, 12, 14, 16, 18, 20 und 24 Bit auf.
4
Die Anordnung der Variablen und weitere Hinweise sind dem Anhang zu entnehmen.
168
Aufgabe 12.12: Ein unipolarer 12-Bit DA-Wandler hat eine Referenzspannung URE F = 5.12 V . Wie groß ist die Aus-
gangsspannung für den binären Eingangscode (101010101010)? Wie groß ist die Spannung U LSB ? Welche
Größe stellt das MSB dar?
12.1.5.2. Ausgangsspannungsbereich
Der Ausgangsspannungsbereich (engl.: full scale output range, abgekürzt FSR) eines DA-Wandlers ist der Differenzbetrag zwischen
dem maximalen und minimalen Wert der analogen Ausgangsspannung. Bei einem unipolaren Wandler entspricht dieser Bereich dem
Wert der maximalen Ausgangsspannung U F SR = UAmax = (1 − 2−n ) · URE F , da der Wert der minimalen Ausgangsspannung 0 V
beträgt. Bei einem bipolaren Wandler entspricht der Bereich der Differenz des Maximal- und des Minimalwertes der Ausgangsspannung
U F SR = UAmax − UAmin = (1−2−n+1 )· URE F −(−URE F ) = (2−2−n+1 )· URE F . Die kleine Differenz des Maximalwertes vom positiven
Wert der Referenzspannung URE F wird meistens vernachlässigt, so daß unipolare Wandler einen Ausgangsspannungsbereich von
U F SR = URE F und bipolare Wandler einen Spannungsbereich U F SR = 2 · URE F aufweisen, der häufig auch mit U F SR = ±URE F
angegeben wird. Übliche Werte des Ausgangsspannungsbereichs unipolarer Umsetzer sind 5 V bzw. 10 V, während die meisten
bipolaren Umsetzer einen Ausgangsspannungsbereich von ± 5 V bzw. ± 10 V aufweisen.
12.1.5.3. Codierung
Als Codierung für das Datenwort am Eingang von DA-Wandlern werden der Dualcode, die Zweier-Komplement- und die OffsetDarstellung verwendet. Bei Umsetzern mit unipolarem Ausgangsspannungsbereich werden fast ausschließlich Datenwörter, die im
Dualcode codiert sind, benutzt. Die analoge Ausgangsspannung UA des Wandlers nimmt daher beim Datenwort, welches in allen Stellen das Binärzeichen 0 aufweist, den Wert 0 V an. Der maximale Wert der analogen Ausgangsspannung UAmax = (1−2−n )·URE F steht
am Ausgang des Umsetzers für den Fall zur Verfügung, daß das Datenwort am Eingang in allen Stellen das Binärzeichen 1 aufweist.
Bei Umsetzern mit bipolarem Ausgangsspannungsbereich wird entweder die Zweier-Komplement- oder die Offset-Darstellung verwendet. Da die DA-Wandler häufig an digitale Rechenschaltungen angeschlossen werden, wird die Zweier-Komplement-Darstellung
bei Wandlern mit bipolarem Ausgangsspannungsbereich bevorzugt. Positive Spannungswerte werden in diesem Fall im Dualcode
und negative Spannungswerte dagegen durch das Zweier-Komplement am Eingang des Umsetzers angegeben. Bei der OffsetDarstellung nimmt die analoge Ausgangsspannung den negativsten Wert UAmin = −URE F an, wenn am Eingang das Datenwort,
welches in allen Stellen das Binärzeichen 0 aufweist, anliegt. Bei dieser Darstellung stellt sich der maximale Wert der Ausgangsspannung UAmax = (1 − 2−n+1 ) · URE F dagegen für den Fall ein, daß das Datenwort am Eingang in allen Stellen das Binärzeichen 1
aufweist.
12.1.5.4. Einschwingzeit
Die Einschwingzeit (engl.: setting time) eines DA-Wandlers ist die Zeit, die der Wandler vom Beginn einer Änderung der Kombination
des Datenwortes an seinem Eingang bis zum Einschwingen des zugehörigen Wertes der Ausgangsspannung innerhalb einer gegebenen Toleranz benötigt. Der Toleranzbereich, den die Ausgangsspannung innerhalb der Einschwingzeit erreichen muß, wird in Bit
(beispielsweise ± 1 LSB) oder in Prozent des Aussteuerbereichs angegeben. Die Hersteller geben in ihren Datenblättern häufig die
Einschwingzeit beim Wechsel aller Bits des Datenwortes an. Das entspricht einer Änderung der Spannung am Ausgang vom minimalen
auf den maximalen Wert oder umgekehrt. Außerdem wird die Einschwingzeit von den Herstellern bei einer minimalen Änderung der
Ausgangsspannung um einen Quant beim Wechsel des Bits mit dem geringsten Stellenwert (LSB), welches einen Wechsel des Bits mit
dem höchsten Stellenwert (MSB) zur Folge hat, angegeben. Diese Änderung erfolgt beispielsweise bei einem 12-Bit-DA-Wandler beim
Übergang des Datenwortes vom Hexadezimalwert 7FFh auf 800h. In den Datenblättern findet man die Angabe der Anstiegszeit (engl.:
slew rate), die die Begrenzung des zeitlichen Anstiegs der Ausgangsspannung, die meist in V/µs angegeben wird, kennzeichnet.
12.1.5.5. Genauigkeit
Unter der Genauigkeit (engl.: accuracy) eines DA-Wandlers versteht man die Differenz zwischen dem analogen Spannungswert an
seinem Ausgang, der sich an Hand des am Eingang anliegenden Datenwortes eigentlich einstellen müßte, und dem Wert der analogen Ausgangsspannung UA, der sich an seinem Ausgang tatsächlich einstellt. Ursachen für eine Differenz zwischen diesen beiden
Werten sind Offset-, Verstärkungs- und Linearitätsfehler. Die Genauigkeit der Umsetzer wird meistens in Bit (beispielsweise ± 1 LSB)
angegeben.
169
12.1.5.6. Glitch
In DA-Wandlern werden Transistoren als elektronische Schalter verwendet. Da diese elektronischen Schalter unterschiedliche Ein- und
Ausschaltzeiten aufweisen, treten bei einigen der verwendeten Verfahren der Umsetzung kurzzeitige Einbrüche oder auch Spitzen der
analogen Ausgangsspannung, allgemein Glitch genannt, beim Wechsel des Datenwortes auf, wie Abbildung 211 zeigt.
Abb. 211: Glitch beim DA-Wandler
Vornehmlich bei der Änderung des Datenwortes am Eingang, der einen Wechsel in einer oder sogar mehrerer Stellen mit einer größeren Wertigkeit hervorruft, verändern eine Vielzahl elektronischer Schalter ihren Zustand. Zeigen die elektronischen Schalter des
Umsetzers eine größere Einschaltzeit, so kann der Fall auftreten, daß zuvor geschlossene Schalter bereits geöffnet sind, bevor die
zuvor geöffneten Schalter ihren geschlossenen Zustand annehmen. Dadurch kommt es zu einer Überschneidung, bei der zu wenige
Schalter geschlossen sind. Bei einigen Umsetzverfahren kommt es daher in diesem Fall kurzzeitig zu einer zu geringen Ausgangsspannung. Erfolgt beispielsweise bei einem 12-Bit-Umsetzer eine Änderung des Wertes des Datenwortes von 7FFh auf 800h, so ist dadurch
in diesem Fall kurzzeitig kein elektronischer Schalter geschlossen, so daß die Ausgangsspannung sogar bis auf 0 V zusammenbricht,
wie Abbildung 211 zeigt. Zeigen die verwendeten elektronischen Schalter des Umsetzers dagegen eine größere Ausschaltzeit, so kann
der Fall auftreten, daß zuvor geöffnete Schalter bereits geschlossen sind, bevor die zuvor geschlossenen Schalter ihren geöffneten
Zustand annehmen. Dadurch kommt es zu einer Überschneidung, bei der zu viele Schalter geschlossen sind. Bei einigen Umsetzverfahren kommt es daher in diesem Fall zu einer kurzzeitig überhöhten Ausgangsspannung, wie Abbildung 211 zeigt. Die meisten
Wandler, bei denen durch das verwendete Verfahren der Umsetzung bedingt Glitch auftreten kann, besitzen daher einen internen
Schaltungsteil, der Deglitcher genannt wird und der Einbrüche und Spitzen der Ausgangsspannung unterdrückt.
12.1.5.7. R-2R Wandler
Eine gebräuchliche Schaltung zur DA-Wandlung ist in Abbildung 212 zu sehen. Der Name R-2R Wandler ist aus den benutzten Widerstandswerten abgeleitet. Typische Werte für R liegen im Bereich von 1 kΩ bis 10 kΩ.
Abb. 212: R-2R Wandler
170
Aufgabe 12.13: Welche OP-Grundschaltung stellt die Schaltung aus Abbildung 212 dar?
12.2. Versuchsdurchführung
12.2.1. Benötigtes Material
Geräte
1
1
1
1
1
1
Labornetzteil
Funktionsgenerator
Oszilloskop
Funktionsplatine
Steckbrett
Vielfachmeßgerät
Bauteile
1
5
5
2
1
1
1
Operationsverstärker, LM324
Widerstände, 1 kΩ
Widerstände, 2.2 kΩ
CMOS-Bausteine, 4069
TTL-Baustein, 74LS00
TTL-Baustein, 74LS30
TTL-Baustein, 74LS32
Lassen Sie sich Zeit für einen sorgfältigen Aufbau der Schaltungen. Kontrollieren Sie alle Anschlüsse, bevor Sie
die Versorgungsspannung anschließen. Achten Sie auf den korrekten Anschluß der Spannungsversorgungen. Eine
Verpolung führt zur Zerstörung der Bausteine.
Ferner ist zu beachten:
• Die Versorgungsspannung beträgt +5 V ol t .
• Die Ausgangsspannung am Funktionsgenerator ist so einzustellen, daß 0 V ol t nicht unter- und +5 V ol t nicht überschritten
wird.
12.2.2. Aufbau des AD-Wandlers nach dem Parallelverfahren
Bauen Sie die Schaltung aus der Versuchsvorbereitung auf. Legen Sie eine Dreieckspannung an, deren Amplitude Werte zwischen
0 V ol t und 5 V ol t annimmt. Die Frequenz soll 500 Hz betragen. Die Spannung UV bzw. V + soll ca. +5.5 V ol t betragen. GND bzw.
V − wird an die Masse angeschlossen.
Aufgabe 12.14: Zeichnen Sie den Verlauf der Ausgänge Aus1 − Aus4 zusammen mit der Eingangsspannung in je ein
Oszillogramm. Bestimmen Sie jeweils die Spannung, bei der der Ausgangspegel wechselt. Beachten Sie die
Hysterese. Berechnen Sie die Spannungsdifferenz ∆U .
Aufgabe 12.15: Bauen Sie nun die von Ihnen entworfene Decodierlogik auf. Zur Anzeige benutzen Sie die Leuchtdi-
oden der RTP-Funktionsplatine. Stellen Sie am Funktionsgenerator eine Frequenz von 1 Hz ein.
12.2.3. Aufbau des DA-Wandlers
Bauen Sie die Schaltung aus der Versuchsvorbereitung auf. Es sollen 4 Bit in ein Analogsignal gewandelt werden. Die Spannung UV
bzw. V + soll +5 V ol t betragen. Die Spannung an V − beträgt −5 V ol t .
171
Aufgabe 12.16: Messen und dokumentieren Sie für alle möglichen Eingangswerte die Ausgangspannung. Benutzen
Sie die Schalter der RTP-Funktionsplatine um die Eingangswerte zu erzeugen.
Die Aufnahme der Spannungen kann mit dem Vielfachmeßgerät oder dem Oszilloskop erfolgen.
172
12.3. Versuchsausarbeitung
Überprüfen Sie:
1. Sind alle Skizzen beschriftet?
2. Sind alle Fragen beantwortet?
12.3.1. Fragen
Aufgabe 12.17: Welche Auflösung (Bit) besitzt der von Ihnen aufgebaute AD-Wandler?
Aufgabe 12.18: Wieviele Komparatoren sind für einen 8 Bit AD-Wandler nach dem Parallelverfahren notwendig?
Kontrollfragen
• Welche Vorteile besitzt die digitale Signalverarbeitung gegenüber der analogen Signalverarbeitung?
• Skizzieren Sie die Funktionsblöcke eines AD-Wandlers.
• Skizzieren Sie einen AD-Wandler nach dem Parallelverfahren.
• Skizzieren Sie einen DA-Wandler nach dem R-2R Prinzip. Wie heißt die OP-Grundschaltung?
• Erläutern Sie das Aliasing anhand einer Skizze. Welche Maßnahmen müssen getroffen werden um Aliasing zu vermeiden?
173
174
Kapitel 13
Synthese von Schaltnetzen
13.1. Versuchsvorbereitung
In diesem Versuch werden die Grundlagen von Schaltnetzen in TTL- und CMOS-Technik vermittelt. Sie werden zur Realisierung
einstelliger und mehrstelliger boolescher Funktionen verwendet.
Durch die zeitlich verzögerten Antworten können Schaltnetze nur beschränkt als Realisierung der zeitfreien booleschen Funktionen
betrachtet werden. Die Berücksichtigung der Signallaufzeiten ist deshalb für die korrekte Funktion äußerst wichtig.
13.1.1. Schaltnetze – Schaltwerke
Schaltnetze sind digitale Funktionseinheiten zur Verknüpfung binärer Schaltvariablen, die häufig auch als kombinatorische Schaltungen bezeichnet werden, da sie aus einer Zusammenschaltung von booleschen Verknüpfungsgliedern bestehen. Der Logik-Zustand
der Ausgangsvariablen eines Schaltnetzes hängt zu irgendeinem Zeitpunkt nur von den Logik-Zuständen der Eingangsvariablen des
Schaltnetzes zu diesem Zeitpunkt ab. Die Schaltalgebra ermöglicht die Beschreibung der Ausgangsvariablen eines Schaltnetzes durch
eine Schaltfunktion, die z. B. mit Hilfe des KV-Diagramms evt. noch minimiert werden kann. Die vereinfachte Schaltfunktion gestattet
die Darstellung des Schaltnetzes durch eine Zusammenschaltung einer möglichst geringen Anzahl boolescher Verknüpfungsglieder.
Ein Schaltwerk ist eine Funktionseinheit, deren Ausgangszustände zu irgendeinem Zeitpunkt nicht nur von den Zuständen an den
Eingängen zu diesem Zeitpunkt, sondern auch von den Zuständen innerer Schaltvariablen des Schaltwerks abhängen. Die Zustände der inneren Schaltvariablen des Schaltwerks, die an Hand der Zustände der Eingänge endlich vieler vorangegangener Zeitpunkte
entstanden sind, werden daher auch als Vorgeschichte des Schaltwerks bezeichnet und sind im Schaltwerk in Flipflops gespeichert.
Schaltwerke werden auch sequentielle Schaltungen oder Folgeschaltungen genannt und bestehen allgemein aus einer kombinatorischen Schaltung und Speichergliedern.
13.1.2. Verzögerungszeiten von Schaltnetzen
Jedes Schaltnetz mit n Eingängen und m Ausgängen wird durch eine (n, m)-stellige boolesche Funktion beschrieben, die in Abhängigkeit von den Eingangswerten die Ausgangswerte angibt.
Ein Schaltnetz als Realisierung einer booleschen Funktion anzusehen ist nicht unkritisch, denn jede Änderung am n-stelligen Eingang des Schaltnetzes hat erst nach einer gewissen Verzögerungszeit eine eventuelle Ausgangsänderung zur Folge. Während dieser
Schaltzeit ist das Verhalten des Schaltnetzes im Sinne der booleschen Funktion falsch.
175
Die Verzögerungszeiten von Schaltnetzen werden durch die Verzögerungen der zu durchlaufenden Gatter hervorgerufen. Man kann
dabei nicht von festen Werten für die Verzögerungszeiten ausgehen. Folgende Punkte beinflussen die Verzögerung.
• Die Signalpfadlängen, d.h. die Anzahl der zu durchlaufenden Gatterstufen zwischen den verschiedenen Ein- und Ausgängen,
können sich unterscheiden.
• Die Verzögerungszeiten ( t pd 1 ) für HIGH-LOW Übergang t pdH L und für LOW-HIGH Übergang t pd LH unterscheiden sich in der
Regel.
• Ferner variieren die Gatterverzögerungszeiten durch
– Toleranzen bei der Fertigung
– Temperaturschwankungen
Soll das Verzögerungsverhalten eines Schaltnetzes spezifiziert werden, so werden zu bestimmten Betriebsverhältnissen angegeben:
∆min : Die Zeitspanne, die nach jeder Eingangsänderung mindestens vergeht, bevor die Ausgangszustände sich ändern.
∆max : Die Zeitspanne nach der für beliebige Eingangsänderungen alle neuen Ausgangszustände stabil sind.
Ein Beispiel für ein Schaltnetz ist ein Halbaddierer. Überlegen Sie sich eine Schaltung für einen Halbaddierer, die nur aus NAND Gattern
(möglicherweise mehrerer ICs vom Typ 74LS00) besteht.
In 1
0
0
1
1
In 2
0
1
0
1
Out
0
1
1
0
Carry
0
0
0
1
Abb. 213: Wahrheitstabelle eines Halbaddierers
Aufgabe 13.1: Zeichnen Sie einen Schaltplan und den zugehörigen Verdrahtungsplan mit Angabe der Anschlußbele-
gungen der verwendeten ICs.
Aufgabe 13.2: Berechnen Sie nun mit Hilfe des Datenblattes zum IC 74LS00 die zu Ihrer Schaltung gehörenden
Werte ∆min und ∆max .
Manche der NAND Gatter müssen Sie als Inverter benutzen. Dabei wird jeweils nur ein Eingang benötigt.
Aufgabe 13.3: Welche drei Möglichkeiten hat man bei der Beschaltung der nicht benötigten Eingänge?
Auch bei anderen Gattern werden manchmal nicht alle Eingänge benötigt. So gibt es zum Beispiel OR Gatter mit acht Eingängen.
Aufgabe 13.4: Geben Sie sinnvolle Vorschriften zur Beschaltung nicht benötigter Eingänge für die AND, OR und
NOR-Bausteine an.
13.1.3. Verschiedene Realisierungen der gleichen booleschen Funktion
Es gibt stets unendlich viele Terme zur Berechnung der gleichen booleschen Funktion und es gibt zwei interessante Kriterien für die
Optimierung eines solchen Terms.
1. Schachtelungstiefe der Operationen
Sie ist ausschlaggebend für die Signalpfadlänge im zugehörigen Schaltnetz und damit für die Verzögerungszeit.
2. Anzahl der Operationen
Für jede Operation wird im zugehörigen Schaltnetz ein Gatter gebraucht. Viele Gatter bedeuten viel Aufwand beim Schaltungsaufbau.
Man hat die Wahl zwischen schnellen Realisierungen mit vielen Gattern und geringer Schachtelungstiefe, bzw. langsameren Realisierungen mit weniger Gattern und großer Schachtelungstiefe.
DNF(KNF)-Terme zeichnen sich durch geringe Schachtelungstiefe und eine verhältnismäßig große Anzahl von Operationen aus. Sie
sind schnell, bedeuten aber relativ großen schaltungstechnischen Aufwand. Nicht unerwähnt soll bleiben, daß DNF(KNF)-Terme auch
den Vorteil guter Schematisierbarkeit haben.
1
propagation delaytime
176
Formt man einen Term systematisch durch partielles Ausklammern mehrfach vorkommender Ausdrücke um, erhält man einen Term,
der nur noch wenige Operationen enthält und dessen Realisierung unkompliziert ist. Wegen der so entstehenden großen Schachtelungstiefe ist die Realisierung aber auch langsamer.
13.1.4. Fehlverhalten während der Schaltvorgänge – Einschwingverhalten
Sind bei der Anwendung eines Schaltnetzes nur die Ausgangszustände von Bedeutung, reicht es, ∆min und ∆max zu berücksichtigen.
In der von ∆min und ∆max beschriebenen Zeitspanne dürfen die Ausgangssignale nicht verwendet werden.
Schaltnetze werden jedoch häufig zur Ansteuerung von Teilschaltungen benötigt, die auf Flanken reagieren (z. B. Zähler).
Während der Verzögerungszeiten können nun mehr Flanken auftreten als aufgrund der jeweiligen Eingangsänderung zu erwarten war.
Diese Erscheinungen sind umso komplizierter und häufiger, je mehr Gatter im Schaltnetz hintereinander geschaltet sind, also je größer
die Schachtelungstiefe ist.
Kurze logische Einschwingvorgänge heißen Hazards und man unterscheidet folgende Arten.2
statischer 0-Hazard
statischer 1-Hazard
dynamischer Hazard
dynamischer Hazard
Abb. 214: Hazards
Folgende Beispielschaltungen3 enthalten Hazards.
Z1
1
E
>1
A
Abb. 215: 1. Hazard-Schaltung
1
Z1
>1
Z2
1
Z3
E
>1
A
Abb. 216: 2. Hazard-Schaltung
2
3
In der Literatur finden sich auch andere Definitionen bzg. 0- und 1-Hazard.
Im Anhang befindet sich die Definition der booleschen Funktionen der betrachteten Elemente.
177
In der Versuchsdurchführung sollen diese Schaltungen aufgebaut werden. Dabei sollen als NOR und OR Gatter die TTL-Bausteine
74LS02 bzw. 74LS32 verwendet werden. Als Inverter wird der CMOS-Baustein 4069 eingesetzt.
Aufgabe 13.5: Überlegen Sie sich nun unter Verwendung der Datenblätter im Anhang, wie die Hazards aussehen
müßten. Zeichnen Sie ein Zeitdiagramm je Schaltung, das den Eingang E , den Ausgang A, sowie die internen
Zustände Zi enthält. Idealisieren Sie dabei, indem Sie von unendlich steilen Flanken der Bauteile ausgehen.
In der Versuchsdurchführung kann es bei der Beobachtung von Hazards Schwierigkeiten geben, weil sie je nach individueller Ausprägung der verwendeten Bauteile zu klein sind.
Aufgabe 13.6: Wie könnte man durch Hinzuschalten zusätzlicher Gatter die Sichtbarkeit der Hazards verbessern?
13.1.5. Elektrisches Einschwingen
Von den logisch erklärbaren Hazards zu unterscheiden sind elektrische Schwingungen, die ebenfalls in einem begrenzten Zeitraum
nach Eingangsänderungen störenden Einfluß auf die Ausgänge eines Schaltnetzes haben können.
Schaltnetze haben, wie jedes physikalische Objekt, ein spezifisches Einschwingverhalten, das auf parasitären Speichereffekten beruht.
13.1.6. Messung kurzer Impulse
Da sich kurze Impulse wie Hazards und Glitches oft schwer messen lassen, bedient man sich häufig einer Hilfsschaltung, die auch ein
einmaliges Auftreten eines kleinen Impulses anzeigt. Dabei handelt es sich um ein RS-Flipflop4 . Ein solches Flipflop läßt sich aus den
im Anhang vorgestellten Bausteinen realisieren.
S
R
0
0
1
1
0
1
0
1
Q
Q −1
0
1
-
Q
Q−1
1
0
-
Abb. 217: Wahrheitstabelle eines RS-Flipflops
Aufgabe 13.7: Zeichnen Sie den Schaltplan einer RS-Flipflop-Schaltung (Impulsauffangschaltung), mit der kurze
HIGH-Impulse gemessen werden können. Verwenden Sie dazu die im Anhang vorgestellten Bausteine. Denken Sie an eine Möglichkeit zur Initialisierung der Flipflops.
Aufgabe 13.8: Wie lang müssen die Impulse sein, damit das Flipflop korrekt schaltet? Benutzen Sie die Zeitangaben
aus den Datenblättern.
Aufgabe 13.9: Wie muß ein Flipflop aufgebaut werden, um kurze LOW-Impulse zu registrieren? Geben Sie eine Wahr-
heitstabelle an und zeichnen Sie den Schaltplan einer solchen Schaltung. Der Schaltplan soll die Anschlußbelegungen der verwendeten ICs und deren PIN-Nummern enthalten.
4
In der Literatur ist auch von einem RS-Latch bzw. SR-Latch die Rede. Die Differenzierung Flipflop ↔ Latch ist nicht einheitlich.
178
13.2. Versuchsdurchführung
13.2.1. Benötigtes Material
Geräte
1
1
1
1
1
1
Labornetzteil
Funktionsgenerator
Oszilloskop
Funktionsplatine
Steckbrett
Vielfachmeßgerät
Bauteile
3
2
2
1
1
CMOS-Bausteine, 4069
TTL-Bausteine, 74LS00
TTL-Bausteine, 74LS02
TTL-Baustein, 74LS30
TTL-Baustein, 74LS32
13.2.2. Beschaltung nicht benötigter Eingänge
In der Vorbereitung haben Sie sich die Möglichkeiten zur Beschaltung nicht benutzter TTL–Eingänge überlegt. Sie sind vom resultierenden Zeitverhalten der Gatter nicht gleichwertig und sollen nun verglichen werden. Damit die Unterschiede deutlich werden, soll ein
8-fach-NAND Gatter als Inverter betrieben werden.
Bauen Sie nacheinander die drei Schaltungen mit den alternativen Belegungen der unbenutzten Eingänge auf.
Aufgabe 13.10: Messen Sie jeweils die Verzögerungszeiten t pdH L und t pd LH , indem Sie den Eingang des 8-fach-NAND
Gatters mit einer Rechteckspannung beschalten und mit dem Oszilloskop das Eingangs- und Ausgangssignal
aufnehmen.
Belegung der unbenutzten Eingänge
t pdH L
t pd LH
13.2.3. Messung der Verzögerungen eines Schaltnetzes
Als Beispiel betrachten wir die Schaltung für einen Halbaddierer aus Aufgabe 13.1.
13.2.3.1. Halbaddierer aufbauen und testen
Bauen Sie Ihre Schaltung gemäß des Verdrahtungsplans aus Aufgabe 13.1 auf und schließen Sie ihre Ausgänge und Eingänge zunächst an Leuchtdioden und Schalter oder Taster der Funktionsplatine an. Wenn Sie Schalter verwenden, müssen Sie den gemeinsamen Tri-State-Eingang der Schalter EN auf LOW legen, um die Schalterausgänge in niederohmigen Zustand zu bringen.
13.2.3.2. Messung der Verzögerungszeiten
Aufgabe 13.11: Messen Sie nun unter Verwendung des Funktionsgenerators und des Oszilloskops die Zeiten ∆min
und ∆max des Halbaddierers.
179
13.2.4. Einschwingverhalten von Schaltnetzen
Bauen Sie nun das erste Schaltnetz mit Hazard (Abbildung 215) auf und oszillographieren Sie den Hazard, indem Sie Eingangs- und
Ausgangssignal darstellen.
Aufgabe 13.12: Tragen Sie den registrierten Hazard in ein Oszillogramm ein.
Vergrößern Sie die Dauer des Hazards, indem Sie drei Inverter in Reihe schalten. Nun wird der Hazard besser sichtbar.
Aufgabe 13.13: Oszillographieren Sie den verlängerten Hazard.
Lassen Sie die Hazard-Schaltung aufgebaut, da sie noch gebraucht wird.
Bauen Sie die zweite Hazardschaltung (Abbildung 216) auf.
Oszillographieren Sie den Hazard – ist er nicht zufriedenstellend groß, treffen Sie die geeigneten Maßnahmen zur Vergrößerung.
Aufgabe 13.14: Zeichnen Sie den Hazard in ein Oszillogramm ein.
13.2.5. Messung kurzer Impulse
13.2.5.1. Auffangschaltung aufbauen
Bauen Sie die von Ihnen vorbereitete Schaltung zum Auffangen von HIGH-Impulsen (Aufgabe 13.7) auf.
Schließen Sie den Ausgang Ihrer Schaltung an die Leuchtdiode D0 der Funktionsplatine an.
Überprüfen Sie nun die Funktion Ihrer Schaltung, indem Sie zunächst beide Eingänge mit den Tastimpulsen T0 und T1 der Funktionsplatine verbinden.
Aufgabe 13.15: Versuchen Sie den Hazard, der in der Schaltung aus Abbildung 215 (1. Hazardschaltung) vorkommt,
mit der Impulsauffangschaltung zu registrieren.
13.3. Versuchsausarbeitung
Überprüfen Sie:
1. Sind alle Skizzen beschriftet?
2. Sind alle Fragen beantwortet?
13.3.1. Fragen
Aufgabe 13.16: Wie sollten unbenutzte Gattereingänge Ihrer Erfahrung nach beschaltet werden? Welchen Nachteil
hat dabei die schnellste Lösung?
Aufgabe 13.17: Vergleichen und diskutieren Sie die theoretisch und praktisch ermittelten Verzögerungszeiten für den
Halbaddierer.
Aufgabe 13.18: Überlegen Sie sich, wie aus zwei Halbaddierern ein Volladdierer aufgebaut werden kann. Geben Sie
ein Blockschaltbild an!
Berechnen Sie für den Volladdierer ∆min und ∆max unter Verwendung Ihrer Meßergebnisse.
Aufgabe 13.19: Weshalb kann man die Dauer sehr kurzer Impulse nur ungenau angeben?
180
Kontrollfragen
• Welche Möglichkeiten der Beschaltung nicht benutzter TTL-Eingänge gibt es?
• Für was steht die Abkürzung IC?
181
Anhang A
t-Verteilung
Die folgende Tabelle zeigt die t-Verteilung. Für ausgewählte Freiheitsgrade (n-1) und Wahrscheinlichkeiten werden die entsprechenden
t-Werte dargestellt.
n-1
P = 95 %
t
P = 99 %
t
P = 99.9 %
t
n-1
P = 95 %
t
P = 99 %
t
P = 99.9 %
t
1
2
3
4
5
6
7
8
9
10
12.706
4.303
3.182
2.776
2.571
2.447
2.365
2.306
2.262
2.228
63.657
9.925
5.841
4.604
4.032
3.707
3.499
3.355
3.250
3.169
636.619
31.598
12.924
8.610
6.869
5.959
5.408
5.041
4.781
4.587
11
12
13
14
15
16
17
18
19
20
2.201
2.179
2.160
2.145
2.131
2.120
2.110
2.101
2.093
2.086
3.106
3.055
3.012
2.977
2.947
2.921
2.898
2.878
2.861
2.845
4.437
4.318
4.221
4.140
4.073
4.015
3.965
3.922
3.883
3.850
182
Anhang B
Das Netzteil HAMEG HM 8040-2
Das Netzteil stellt die Versorgungsspannungen für die verwendeten Bauteile und Platinen zur Verfügung. Es handelt sich um ein
Doppelnetzteil, welches zwei unabhängige Spannungen zwischen 0 V und 20 V zur Verfügung stellt. Der Strom kann jeweils maximal
500 mA betragen. Das Netzteil besitzt einen Schalter, mit dem die Ausgangsklemmen ein- bzw. ausgeschaltet werden. Sollte ein
Kurzschluß auftreten, so leuchtet ein grüner Pfeil in der Mitte der Anzeigeinstrumente. In diesem Fall sind die Ausgänge sofort
abzuschalten und die aufgebaute Schaltung muß nach Verdrahtungsfehlern bzw. defekten Bauteilen untersucht werden.
183
184
Abb. 218: HAMEG-Netzteil (aus HAMEG-Handbuch)
Anhang C
Der Funktionsgenerator HAMEG HM 8030-5
In den meisten Fällen ist die Netzspannung oder die von Netzgeräten erzeugte Gleich- oder Wechselspannung nicht zum Testen von
Schaltungen geeignet. So werden bei Digitalschaltungen häufig Rechteckspannungen benötigt. Auch ist eine Variation der Frequenz
von periodischen Signalen beim Überprüfen der Schaltung nützlich, um beispielsweise feststellen zu können, bis zu welcher maximalen
Geschwindigkeit die Schaltung noch funktioniert. Der verwendete Funktionsgenerator kann Sinus-, Dreieck- und Rechteckspannungen
erzeugen. Die maximale Spannung kann 20 V betragen. Zusätzlich kann jeder Wellenform eine Gleichspannung überlagert werden.
Diese sogenannte Offset-Spannung kann zwischen −5 V und +5 V liegen.
185
Abb. 219: HAMEG-Funktionsgenerator (aus HAMEG-Handbuch)
186
Anhang D
Der Farbcode für Widerstandswerte
Kennfarbe
keine
silber
gold
schwarz
braun
rot
orange
gelb
grün
blau
violett
grau
weiß
1. Ring
2. Ring
0
1
2
3
0
1
2
3
4
5
6
7
8
9
4
5
6
7
8
9
3. Ring
· 0.01 Ω
· 0.1 Ω
· 1.0 Ω
· 10 Ω
· 100 Ω
· 1.0 kΩ
· 10 kΩ
· 100 kΩ
· 1.0 MΩ
· 10 MΩ
· 100 MΩ
4.Ring
±20%
±10%
±5%
±20%
±1%
±2%
±0, 5%
Abb. 220: Farbkodierung der Widerstände
Beispiel: Ein Widerstand mit der Farbkodierung gelb / violett / orange / gold hat einen Widerstand von 47 kΩ, bei einer Toleranz von
5 %.
Es existieren auch Widerstände mit fünf Farbringen. Diese sind analog zu den vierstelligen Widerständen kodiert, d.h. der letzte Ring
gibt die Toleranz an, der vorletzte Ring eine Zehner-Potenz und die ersten drei Ringe sind wie der 1. Ring in obiger Tabelle kodiert.
Beispiel: grün / orange / blau / braun / braun = 5.36 kΩ, 1% Toleranz.
187
Anhang E
Das Steckbrett
Abbildung 221 zeigt den Anschluß des Funktionsgenerators an das Steckbrett.
Abb. 221: Ansicht der BNC-Buchse mit Tastkopf
188
Erläuterung: Die „Pins” a − e sind verbunden. Ebenso f − j . Zwischen e und f besteht keine Verbindung. In diese Spalten werden
die ICs mit DIL-Gehäuse eingesetzt.
Abb. 222: Ansicht des Steckbretts
189
Anhang F
Fehlersuche
Im folgenden einige typische Fehler:
• Ist die Stromversorgung angeschlossen und angeschaltet?
• Ist bei Rechteckspannung der richtige Offset, die richtige Amplitude (TTL-Pegel) und die richtige Frequenz eingestellt?
• Liegt an den Bausteinen die Betriebsspannung an? Mit Hilfe des Vielfachmeßgeräts kann dies kontrolliert werden.
• Im spannungslosen Zustand kann mit dem Vielfachmeßgerät auch der „Durchgang” gemessen werden. Üblicherweise sollte ein
Kabel einen ohmschen Widerstand von ≈ 0 Ω haben.
• Bauen Sie die Schaltungen kompakt und platzsparend auf. Lange Verbindungen über das ganze Steckbrett vermindern die
Übersichtlichkeit und verursachen ggf. Störungen.
• Stecken Sie alle ICs in der gleichen Richtung, z.B. die Kerbe jeweils nach oben.
190
Anhang G
Form der Versuchsdurchführung
Die Versuchsdurchführung muß alle relevanten Fakten zum Versuch enthalten. Sie ist als sauberes, handschriftliches, aber gut lesbares
Dokument so zu verfassen, daß eine andere fachkundige Person den dokumentierten Versuch jederzeit nachvollziehen, oder einen
begonnenen Versuch ohne Probleme weiterführen kann.
Die Versuchsdurchführung sollte u.a. folgende Inhalte aufweisen:
• Termin, Datum
• Berechnungen, Schätzungen, Approximationen, Annahmen
• Meßschaltungen, Meßwerte, verwendete Meßgeräte (evt. mit Einstellungen), Randbedingungen
• Auswertung und Kommentar der Messungen, Diskussion, Plausibilitätskontrolle
191
Anhang H
Die Funktionsplatine
Die Funktionsplatine ist zur Generierung und Anzeige von Signalen entwickelt worden. Sie läßt sich in fünf Bereiche unterteilen:
• Impulsverkürzung
• Generierung von prellfreien Schalt- und Tastimpulsen
• Dateneingabe
• Datenanzeige und Speicheranzeige
• CMOS-Finger und Flankenanzeige
Impulsverkürzung
Die Impulsverkürzung umfaßt einen Eingang (TRIG) und drei Ausgänge (TRIG, IMP und IMP). Eine negative Flanke am Eingang TRIG
löst einen high-Impuls am Ausgang IMP aus, der in seiner Dauer am Trimmpotentiometer einstellbar ist. TRIG und IMP stehen auch
negiert zur Verfügung.
Generierung von prellfreien Schalt- und Tastimpulsen
Es stehen drei entprellte Taster zur Verfügung. Zu jedem Taster gibt es einen Ausgang Tn und einen Ausgang Sn . Die Signale Tn
haben low-Pegel bei jeweiligem nicht gedrücktem und high-Pegel bei gedrücktem Taster. Die Signale Sn wechseln ihren Pegel bei jeder
positiven Flanke des entsprechenden Signals Tn . Alle Signale werden von LEDs angezeigt; sie leuchten bei high-Pegel. Die Ausgänge
garantieren high-Pegel bei maximal 0.4 mA und low-Pegel bei maximal 16 mA Belastung.
Vorsicht: die Ausgänge können bei wesentlich zu großem low-Dauerstrom zerstört werden!
192
Dateneingabe
Es stehen acht nicht entprellte Schalter zur Verfügung, die auf acht Ausgängen An high- (oder low-) Pegel erzeugen können. Die
Schalterstellungen werden über Leuchtdioden angezeigt; sie leuchten bei high-Pegel. Die Ausgänge sind Tri-State-Ausgänge und
können über den gemeinsamen EN-Eingang auf „hochohmig” oder „niederohmig” geschaltet werden.
Wichtig: im Normalfall werden Sie die Ausgänge im niederohmigen Zustand benutzen wollen, vergessen Sie also nicht, den EN-Eingang
auf low zu legen.
Bei den Ausgängen An handelt es sich um LS-Ausgänge.
Datenanzeige
Die Eingänge werden durch acht LEDs ständig angezeigt. Die LEDs leuchten bei high-Pegel. Die Eingänge belasten mit 1.6 mA bei
low-Pegel und mit 0.004 mA bei high-Pegel.
Speicheranzeige
Die komplette Datenanzeige wird bei jeder positiven Flanke am Eingang CLK auf die zweite Reihe von LEDs übernommen und bleibt
dort bis zur nächsten Übernahme erhalten.
Der CMOS-Finger – „ein belastungsfreier” Meßeingang
Der CMOS-Finger besteht aus einem Eingang (CMOSIN), einer roten und einer grünen LED. High-Pegel am Eingang lassen die rote
LED, low-Pegel die grüne LED leuchten. Der Eingang belastet mit 1µA.
Dadurch verursachen bei offenem Eingang schon elektrische Felder Pegel. Durch fast überall vorhandene 50 Hz Wechselfelder leuchten die rote und grüne Leuchtdiode bei offenem Eingang für gewöhnlich beide. Mit diesem Meßeingang kann man also auch feststellen,
ob ein Ausgang im hochohmigen Zustand ist bzw. ob eine Steckverbindung nicht mehr leitet.
Die Flankenanzeige – zur Registrierung kurzer Impulse
Es stehen drei Eingänge eines CMOS-RS-Flip-Flops zur Verfügung (SET, CLK, RST), dessen Ausgang von einer LED angezeigt wird.
193
Abb. 223: Skizze zur Funktionsplatine
194
Anhang I
Datenblätter
Im folgenden sind Auszüge aus den Datenblätter aller im Praktikum verwendeten Halbleiterbauelemente zu finden. Zu beachten ist, daß
die Bezeichnung von Größen in der englischen bzw. amerikanischen Literatur und damit auch den meisten Datenblättern sich von den
deutschen Bezeichnungen unterscheidet. So wird die Spannung immer mit V statt U bezeichnet. Eine Sammlung von Datenblättern
findet sich unter www.conrad.de.
195
BAT 45
SMALL SIGNAL SCHOTTKY DIODE
DO 35
(Glass)
DESCRIPTION
Metal to silicon junction diode primarly intended for
UHF mixers and ultrafast switching applications.
ABSOLUTE RATINGS (limiting values)
Symbol
VRRM
Parameter
Value
Repetitive Peak Reverse Voltage
Forward Continuous Current
Ta = 25 °C
IFSM
Surge non Repetitive Forward Current
tp ≤ 1s
Tstg
Tj
Storage and Junction Temperature Range
TL
Maximum Temperature for Soldering during 10s at 4mm from
Case
IF
Unit
15
V
30
mA
60
mA
- 65 to +150
- 65 to +125
°C
°C
230
°C
THERMAL RESISTANCE
Symbol
Rth(j-a)
Test Conditions
Junction-ambient*
Value
Unit
400
°C/W
* On infinite heatsink with 4mm lead length
November 1994
1/4
Abb. 224: Datenblatt der Diode BAT45, Seite 1
196
BAT 45
ELECTRICAL CHARACTERISTICS
STATIC CHARACTERISTICS
Symbol
Test Conditions
Min.
Typ.
Max.
15
V
VBR
T amb = 25°C
IR = 10µA
VF (1)
T amb = 25°C
IF = 1mA
0.38
T amb = 25°C
IF = 10mA
0.5
IR (1)
T amb = 25°C
IF = 30mA
T amb = 25°C
VR = 6V
Unit
V
1
0.1
µA
DYNAMIC CHARACTERISTICS
Symbol
Max.
Unit
C
T amb = 25°C
Test Conditions
VR = 1V
f = 1MHz
Min.
Typ.
1.1
pF
τ
T amb = 25°C
IF = 20mA
Krakauer Method
100
ps
F (2)
T amb = 25°C
f = 1GHz
7
dB
6
(1) Pulse test: tp ≤ 300µs δ < 2%.
(2) Noise figure test :
- diode is inserted in a tuned stripline circuit
- local oscillator frequency 1GHz
- local oscillator power 1mW
- intermediate frequency amplifier, tuned on 300MHz, has a noise figure 1.5dB
Matched batches available on request. Test conditions (forward voltage and/or capacitance) according to customer specification.
2/4
Abb. 225: Datenblatt der Diode BAT45, Seite 2
197
DISCRETE SEMICONDUCTORS
DATA SHEET
M3D176
1N4148; 1N4446; 1N4448
High-speed diodes
Product specification
Supersedes data of April 1992
File under Discrete Semiconductors, SC01
1996 Apr 15
Abb. 226: Datenblatt der Diode 1N4148, Seite 1
198
Philips Semiconductors
Product specification
High-speed diodes
1N4148; 1N4446; 1N4448
FEATURES
DESCRIPTION
• Hermetically sealed leaded glass
SOD27 (DO-35) package
The 1N4148, 1N4446, 1N4448 are high-speed switching diodes fabricated in
planar technology, and encapsulated in hermetically sealed leaded glass
SOD27 (DO-35) packages.
• High switching speed: max. 4 ns
• General application
• Continuous reverse voltage:
max. 75 V
• Repetitive peak reverse voltage:
max. 75 V
handbook, halfpage
k
a
• Repetitive peak forward current:
max. 450 mA
MAM246
• Forward voltage: max. 1 V.
The diodes are type branded.
APPLICATIONS
Fig.1 Simplified outline (SOD27; DO-35) and symbol.
• High-speed switching.
LIMITING VALUES
In accordance with the Absolute Maximum Rating System (IEC 134).
SYMBOL
VRRM
PARAMETER
CONDITIONS
repetitive peak reverse voltage
VR
continuous reverse voltage
IF
continuous forward current
IFRM
repetitive peak forward current
IFSM
non-repetitive peak forward current
MIN.
MAX.
−
75
V
UNIT
V
−
75
−
200
mA
−
450
mA
t = 1 µs
−
4
A
t = 1 ms
−
1
A
t=1s
−
0.5
A
see Fig.2; note 1
square wave; Tj = 25 °C prior to
surge; see Fig.4
−
500
storage temperature
−65
+200
°C
junction temperature
−
200
°C
Ptot
total power dissipation
Tstg
Tj
Tamb = 25 °C; note 1
mW
Note
1. Device mounted on an FR4 printed circuit-board; lead length 10 mm.
1996 Apr 15
2
Abb. 227: Datenblatt der Diode 1N4148, Seite 2
199
Philips Semiconductors
Product specification
High-speed diodes
1N4148; 1N4446; 1N4448
ELECTRICAL CHARACTERISTICS
Tj = 25 °C; unless otherwise specified.
SYMBOL
VF
PARAMETER
forward voltage
CONDITIONS
MAX.
UNIT
1N4148
IF = 10 mA
−
1.0
V
1N4446
IF = 20 mA
−
1.0
V
1N4448
IF = 5 mA
0.62
0.72
V
−
1.0
V
IF = 100 mA
IR
MIN.
see Fig.3
reverse current
25
nA
VR = 20 V; Tj = 150 °C; see Fig.5
VR = 20 V; see Fig.5
−
50
µA
−
3
µA
IR
reverse current; 1N4448
VR = 20 V; Tj = 100 °C; see Fig.5
Cd
diode capacitance
f = 1 MHz; VR = 0; see Fig.6
4
pF
trr
reverse recovery time
when switched from IF = 10 mA to
IR = 60 mA; RL = 100 Ω;
measured at IR = 1 mA; see Fig.7
4
ns
Vfr
forward recovery voltage
when switched from IF = 50 mA;
tr = 20 ns; see Fig.8
2.5
V
−
THERMAL CHARACTERISTICS
SYMBOL
PARAMETER
CONDITIONS
VALUE
UNIT
Rth j-tp
thermal resistance from junction to tie-point
lead length 10 mm
240
K/W
Rth j-a
thermal resistance from junction to ambient
lead length 10 mm; note 1
350
K/W
Note
1. Device mounted on a printed circuit-board without metallization pad.
1996 Apr 15
3
Abb. 228: Datenblatt der Diode 1N4148, Seite 3
200
Order this document
by BC546/D
SEMICONDUCTOR TECHNICAL DATA
NPN Silicon
COLLECTOR
1
2
BASE
3
EMITTER
1
MAXIMUM RATINGS
2
Symbol
BC
546
Collector – Emitter Voltage
VCEO
65
Collector – Base Voltage
VCBO
80
Emitter – Base Voltage
VEBO
6.0
Vdc
Collector Current — Continuous
IC
100
mAdc
Total Device Dissipation @ TA = 25°C
Derate above 25°C
PD
625
5.0
mW
mW/°C
Total Device Dissipation @ TC = 25°C
Derate above 25°C
PD
1.5
12
Watt
mW/°C
TJ, Tstg
– 55 to +150
°C
Rating
Operating and Storage Junction
Temperature Range
BC
547
BC
548
Unit
45
30
Vdc
50
30
Vdc
3
CASE 29–04, STYLE 17
TO–92 (TO–226AA)
THERMAL CHARACTERISTICS
Characteristic
Symbol
Max
Unit
Thermal Resistance, Junction to Ambient
RqJA
200
°C/W
Thermal Resistance, Junction to Case
RqJC
83.3
°C/W
ELECTRICAL CHARACTERISTICS (TA = 25°C unless otherwise noted)
Characteristic
Symbol
Min
Typ
Max
Unit
OFF CHARACTERISTICS
Collector – Emitter Breakdown Voltage
(IC = 1.0 mA, IB = 0)
BC546
BC547
BC548
V(BR)CEO
65
45
30
—
—
—
—
—
—
V
Collector – Base Breakdown Voltage
(IC = 100 µAdc)
BC546
BC547
BC548
V(BR)CBO
80
50
30
—
—
—
—
—
—
V
Emitter – Base Breakdown Voltage
(IE = 10 mA, IC = 0)
BC546
BC547
BC548
V(BR)EBO
6.0
6.0
6.0
—
—
—
—
—
—
V
Collector Cutoff Current
(VCE = 70 V, VBE = 0)
(VCE = 50 V, VBE = 0)
(VCE = 35 V, VBE = 0)
(VCE = 30 V, TA = 125°C)
BC546
BC547
BC548
BC546/547/548
—
—
—
—
0.2
0.2
0.2
—
15
15
15
4.0
nA
ICES
µA
REV 1
Motorola Small–Signal Transistors, FETs and Diodes Device Data
Motorola, Inc. 1996
1
Abb. 229: Datenblatt des Transistors BC546, Seite 1
201
ELECTRICAL CHARACTERISTICS (TA = 25°C unless otherwise noted) (Continued)
Symbol
Min
Typ
Max
BC547A/548A
BC546B/547B/548B
BC548C
—
—
—
90
150
270
—
—
—
(IC = 2.0 mA, VCE = 5.0 V)
BC546
BC547
BC548
BC547A/548A
BC546B/547B/548B
BC547C/BC548C
110
110
110
110
200
420
—
—
—
180
290
520
450
800
800
220
450
800
(IC = 100 mA, VCE = 5.0 V)
BC547A/548A
BC546B/547B/548B
BC548C
—
—
—
120
180
300
—
—
—
—
—
—
0.09
0.2
0.3
0.25
0.6
0.6
—
0.7
—
0.55
—
—
—
0.7
0.77
150
150
150
300
300
300
—
—
—
Characteristic
Unit
ON CHARACTERISTICS
DC Current Gain
(IC = 10 µA, VCE = 5.0 V)
hFE
Collector – Emitter Saturation Voltage
(IC = 10 mA, IB = 0.5 mA)
(IC = 100 mA, IB = 5.0 mA)
(IC = 10 mA, IB = See Note 1)
VCE(sat)
Base – Emitter Saturation Voltage
(IC = 10 mA, IB = 0.5 mA)
VBE(sat)
Base–Emitter On Voltage
(IC = 2.0 mA, VCE = 5.0 V)
(IC = 10 mA, VCE = 5.0 V)
VBE(on)
—
V
V
V
SMALL–SIGNAL CHARACTERISTICS
Current – Gain — Bandwidth Product
(IC = 10 mA, VCE = 5.0 V, f = 100 MHz)
fT
BC546
BC547
BC548
MHz
Output Capacitance
(VCB = 10 V, IC = 0, f = 1.0 MHz)
Cobo
—
1.7
4.5
pF
Input Capacitance
(VEB = 0.5 V, IC = 0, f = 1.0 MHz)
Cibo
—
10
—
pF
125
125
125
240
450
—
—
220
330
600
500
900
260
500
900
—
—
—
2.0
2.0
2.0
10
10
10
Small–Signal Current Gain
(IC = 2.0 mA, VCE = 5.0 V, f = 1.0 kHz)
Noise Figure
(IC = 0.2 mA, VCE = 5.0 V, RS = 2 k ,
f = 1.0 kHz, ∆f = 200 Hz)
W
hfe
BC546
BC547/548
BC547A/548A
BC546B/547B/548B
BC547C/548C
—
NF
BC546
BC547
BC548
dB
Note 1: IB is value for which IC = 11 mA at VCE = 1.0 V.
2
Motorola Small–Signal Transistors, FETs and Diodes Device Data
Abb. 230: Datenblatt des Transistors BC546, Seite 2
202
Order this document by LM324/D
The LM324 series are low–cost, quad operational amplifiers with true
differential inputs. They have several distinct advantages over standard
operational amplifier types in single supply applications. The quad amplifier
can operate at supply voltages as low as 3.0 V or as high as 32 V with
quiescent currents about one–fifth of those associated with the MC1741 (on
a per amplifier basis). The common mode input range includes the negative
supply, thereby eliminating the necessity for external biasing components in
many applications. The output voltage range also includes the negative
power supply voltage.
• Short Circuited Protected Outputs
•
•
•
•
•
•
•
•
QUAD DIFFERENTIAL INPUT
OPERATIONAL AMPLIFIERS
SEMICONDUCTOR
TECHNICAL DATA
True Differential Input Stage
N SUFFIX
PLASTIC PACKAGE
CASE 646
(LM224, LM324,
LM2902 Only)
Single Supply Operation: 3.0 V to 32 V
Low Input Bias Currents: 100 nA Maximum (LM324A)
14
1
Four Amplifiers Per Package
Internally Compensated
Common Mode Range Extends to Negative Supply
D SUFFIX
PLASTIC PACKAGE
CASE 751A
(SO–14)
Industry Standard Pinouts
14
ESD Clamps on the Inputs Increase Ruggedness without Affecting
Device Operation
1
PIN CONNECTIONS
Out 1
2
Inputs 1
3
MAXIMUM RATINGS (TA = + 25°C, unless otherwise noted.)
Rating
Symbol
Power Supply Voltages
Single Supply
Split Supplies
LM224
LM324, LM324A
LM2902,
LM2902V
VCC
Unit
Vdc
VCC
VCC, VEE
32
±16
26
±13
Input Differential
Voltage Range (See
Note 1)
VIDR
±32
±26
Vdc
Input Common Mode
Voltage Range
VICR
–0.3 to 32
–0.3 to 26
Vdc
Output Short Circuit
Duration
tSC
Continuous
Junction Temperature
TJ
Tstg
150
°C
–65 to +150
°C
Storage Temperature
Range
Operating Ambient
Temperature Range
TA
–25 to +85
0 to +70
NOTE: 1. Split Power Supplies.
–40 to +105
–40 to +125
°C
*1
)
*
4
)
Inputs 2
6
)2
*
)
*
3
Out 4
13
Inputs 4
12
11
4
5
Out 2
14
1
VEE, Gnd
10
9
8
7
Inputs 3
Out 3
(Top View)
ORDERING INFORMATION
Device
LM2902D
LM2902N
LM2902VD
LM2902VN
LM224D
LM224N
LM324AD
LM324AN
LM324D
LM324N
Operating
Temperature Range
TA = –40° to +105°C
TA = –40° to +125°C
TA = –25° to +85°C
TA = 0° to +70°C
Motorola, Inc. 1996
MOTOROLA ANALOG IC DEVICE DATA
Package
SO–14
Plastic DIP
SO–14
Plastic DIP
SO–14
Plastic DIP
SO–14
Plastic DIP
SO–14
Plastic DIP
Rev 3
1
Abb. 231: Datenblatt des Operationsverstärkers LM324, Seite 1
203
LM324, LM324A, LM224, LM2902, LM2902V
ELECTRICAL CHARACTERISTICS (VCC = 5.0 V, VEE = Gnd, TA = 25°C, unless otherwise noted.)
LM224
Characteristics
Symbol
Input Offset Voltage
VCC = 5.0 V to 30 V
(26 V for LM2902,
V), VICR = 0 V to
VCC –1.7 V, VO =
1.4 V, RS = 0 Ω
TA = 25°C
TA = Thigh(1)
TA = Tlow(1)
VIO
Average Temperature
Coefficient of Input
Offset Voltage
TA = Thigh to Tlow(1)
Min
Typ
LM324A
Max
Min
Typ
LM324
Max
Min
Typ
LM2902
Max
Min
Typ
LM2902V
Max
Min
Typ
Max
Unit
mV
–
2.0
5.0
–
2.0
3.0
–
2.0
7.0
–
2.0
7.0
–
2.0
7.0
–
–
7.0
–
–
5.0
–
–
9.0
–
–
10
–
–
13
–
–
7.0
–
–
5.0
–
–
9.0
–
–
10
–
–
10
∆VIO/∆T
–
7.0
–
–
7.0
30
–
7.0
–
–
7.0
–
–
7.0
–
µV/°C
Input Offset Current
TA = Thigh to Tlow(1)
IIO
–
–
3.0
–
30
100
–
–
5.0
–
30
75
–
–
5.0
–
50
150
–
–
5.0
–
50
200
–
–
5.0
–
50
200
nA
Average Temperature
Coefficient of Input
Offset Current
TA = Thigh to Tlow(1)
∆IIO/∆T
–
10
–
–
10
300
–
10
–
–
10
–
–
10
–
pA/°C
Input Bias Current
TA = Thigh to Tlow(1)
IIB
–
–
–90
–
–150
–300
–
–
–45
–
–100
–200
–
–
–90
–
–250
–500
–
–
–90
–
–250
–500
–
–
–90
–
–250
–500
nA
Input Common Mode
Voltage Range(2)
VICR
V
VCC = 30 V (26 V for
LM2902, V)
0
–
28.3
0
–
28.3
0
–
28.3
0
–
24.3
0
–
24.3
VCC = 30 V (26 V for
LM2902, V),
TA = Thigh to Tlow
0
–
28
0
–
28
0
–
28
0
–
24
0
–
24
–
–
VCC
–
–
VCC
–
–
VCC
–
–
VCC
–
–
VCC
Differential Input
Voltage Range
VIDR
Large Signal Open
Loop Voltage Gain
AVOL
RL = 2.0 kΩ, VCC =
15 V, for Large VO
Swing, TA = Thigh
to Tlow(1)
V
V/mV
50
25
100
–
–
–
25
15
100
–
–
–
25
15
100
–
–
–
25
15
100
–
–
–
25
15
100
–
–
–
Channel Separation
10 kHz ≤ f ≤ 20 kHz,
Input Referenced
CS
–
–120
–
–
–120
–
–
–120
–
–
–120
–
–
–120
–
dB
Common Mode
Rejection, RS ≤ 10 kΩ
CMR
70
85
–
65
70
–
65
70
–
50
70
–
50
70
–
dB
Power Supply
Rejection
PSR
65
100
–
65
100
–
65
100
–
50
100
–
50
100
–
dB
Output Voltage – High
Limit (TA = Thigh to
Tlow)(1)
VOH
V
VCC = 5.0 V, RL =
2.0 kΩ, TA = 25°C
3.3
3.5
–
3.3
3.5
–
3.3
3.5
–
3.3
3.5
–
3.3
3.5
–
VCC = 30 V (26 V for
LM2902, V),
RL = 2.0 kΩ
26
–
–
26
–
–
26
–
–
22
–
–
22
–
–
VCC = 30 V (26 V for
LM2902, V),
RL = 10 kΩ
27
28
–
27
28
–
27
28
–
23
24
–
23
24
–
NOTES: 1. Tlow = –25°C for LM224
Thigh = +85°C for LM224
= 0°C for LM324, A
= +70°C for LM324, A
= –40°C for LM2902
= +105°C for LM2902
= –40°C for LM2902V
= +125°C for LM2902V
2. The input common mode voltage or either input signal voltage should not be allowed to go negative by more than 0.3 V. The upper end of the
common mode voltage range is VCC –1.7 V.
2
MOTOROLA ANALOG IC DEVICE DATA
Abb. 232: Datenblatt des Operationsverstärkers LM324, Seite 2
204
LM324, LM324A, LM224, LM2902, LM2902V
ELECTRICAL CHARACTERISTICS (VCC = 5.0 V, VEE = Gnd, TA = 25°C, unless otherwise noted.)
LM224
LM324A
LM324
LM2902
LM2902V
Characteristics
Symbol
Min
Typ
Max
Min
Typ
Max
Min
Typ
Max
Min
Typ
Max
Min
Typ
Max
Unit
Output Voltage – Low
Limit, VCC = 5.0 V, RL
= 10 kΩ, TA = Thigh to
Tlow(1)
VOL
–
5.0
20
–
5.0
20
–
5.0
20
–
5.0
100
–
5.0
100
mV
Output Source Current
(VID = +1.0 V, VCC =
15 V)
IO +
TA = 25°C
TA = Thigh to Tlow(1)
Output Sink Current
(VID = –1.0 V, VCC =
15 V) TA = 25°C
TA = Thigh to Tlow(1)
(VID = –1.0 V, VO =
200 mV, TA = 25°C)
IO –
Output Short Circuit to
Ground(3)
ISC
Power Supply Current
(TA = Thigh to Tlow)(1)
VCC = 30 V (26 V for
LM2902, V),
VO = 0 V, RL = ∞
ICC
VCC = 5.0 V,
VO = 0 V, RL = ∞
mA
20
40
–
20
40
–
20
40
–
20
40
–
20
40
–
10
20
–
10
20
–
10
20
–
10
20
–
10
20
–
10
20
–
10
20
–
10
20
–
10
20
–
10
20
–
5.0
8.0
–
5.0
8.0
–
5.0
8.0
–
5.0
8.0
–
5.0
8.0
–
12
50
–
12
50
–
12
50
–
–
–
–
–
–
–
µA
–
40
60
–
40
60
–
40
60
–
40
60
–
40
60
mA
–
–
3.0
–
1.4
3.0
–
–
3.0
–
–
3.0
–
–
3.0
–
–
1.2
–
0.7
1.2
–
–
1.2
–
–
1.2
–
–
1.2
mA
mA
NOTES: 1. Tlow = –25°C for LM224
Thigh = +85°C for LM224
= 0°C for LM324, A
= +70°C for LM324, A
= –40°C for LM2902
= +105°C for LM2902
= –40°C for LM2902V
= +125°C for LM2902V
2. The input common mode voltage or either input signal voltage should not be allowed to go negative by more than 0.3 V. The upper end of the
common mode voltage range is VCC –1.7 V.
Representative Circuit Diagram
(One–Fourth of Circuit Shown)
Output
Bias Circuitry
Common to Four
Amplifiers
VCC
Q15
Q16
Q22
Q14
Q13
40 k
Q19
5.0 pF
Q12
Q24
25
Q23
+
Q20
Q18
Inputs
Q11
Q9
–
Q21
Q17
Q6
Q2
Q25
Q7
Q5
Q1
Q8
Q3
Q4
Q26
2.4 k
Q10
2.0 k
VEE/Gnd
MOTOROLA ANALOG IC DEVICE DATA
3
Abb. 233: Datenblatt des Operationsverstärkers LM324, Seite 3
205
LM324, LM324A, LM224, LM2902, LM2902V
CIRCUIT DESCRIPTION
Large Signal Voltage Follower Response
VCC = 15 Vdc
RL = 2.0 kΩ
TA = 25°C
1.0 V/DIV
The LM324 series is made using four internally
compensated, two–stage operational amplifiers. The first
stage of each consists of differential input devices Q20 and
Q18 with input buffer transistors Q21 and Q17 and the
differential to single ended converter Q3 and Q4. The first
stage performs not only the first stage gain function but also
performs the level shifting and transconductance reduction
functions. By reducing the transconductance, a smaller
compensation capacitor (only 5.0 pF) can be employed, thus
saving chip area. The transconductance reduction is
accomplished by splitting the collectors of Q20 and Q18.
Another feature of this input stage is that the input common
mode range can include the negative supply or ground, in
single supply operation, without saturating either the input
devices or the differential to single–ended converter. The
second stage consists of a standard current source load
amplifier stage.
5.0 µs/DIV
Each amplifier is biased from an internal–voltage regulator
which has a low temperature coefficient thus giving each
amplifier good temperature characteristics as well as
excellent power supply rejection.
Single Supply
Split Supplies
3.0 V to VCC(max)
VCC
VCC
1
1
1.5 V to VCC(max)
2
2
3
3
4
4
1.5 V to VEE(max)
VEE
VEE/Gnd
4
MOTOROLA ANALOG IC DEVICE DATA
Abb. 234: Datenblatt des Operationsverstärkers LM324, Seite 4
206
LM324, LM324A, LM224, LM2902, LM2902V
Figure 1. Input Voltage Range
Figure 2. Open Loop Frequency
20
120
A VOL, LARGE–SIGNAL
OPEN LOOP VOLTAGE GAIN (dB)
± V , INPUT VOLTAGE (V)
I
18
16
14
12
10
Negative
8.0
Positive
6.0
4.0
2.0
0
80
60
40
20
0
–20
0
2.0
4.0
6.0
8.0
10
12
14
16
18
20
1.0
10
100
1.0 k
10 k
100 k
1.0 M
± VCC/VEE, POWER SUPPLY VOLTAGES (V)
f, FREQUENCY (Hz)
Figure 3. Large–Signal Frequency Response
Figure 4. Small–Signal Voltage Follower
Pulse Response (Noninverting)
14
550
RL = 2.0 kΩ
VCC = 15 V
VEE = Gnd
Gain = –100
RI = 1.0 kΩ
RF = 100 kΩ
12
10
8.0
VO , OUTPUT VOLTAGE (mV)
VOR , OUTPUT VOLTAGE RANGE (V pp )
VCC = 15 V
VEE = Gnd
TA = 25°C
100
6.0
4.0
2.0
500
Input
450
Output
400
350
300
250
VCC = 30 V
VEE = Gnd
TA = 25°C
CL = 50 pF
200
0
1.0
10
100
0
1000
0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
f, FREQUENCY (kHz)
t, TIME (µs)
Figure 5. Power Supply Current versus
Power Supply Voltage
Figure 6. Input Bias Current versus
Power Supply Voltage
8.0
R
TA = 25°C
RL =
2.1
1.8
I IB , INPUT BIAS CURRENT (nA)
ICC , POWER SUPPLY CURRENT (mA)
2.4
1.5
1.2
0.9
0.6
0.3
0
0
5.0
10
15
20
25
VCC, POWER SUPPLY VOLTAGE (V)
30
35
90
80
70
0
2.0
4.0 6.0 8.0
10
12
14 16
VCC, POWER SUPPLY VOLTAGE (V)
MOTOROLA ANALOG IC DEVICE DATA
18
20
5
Abb. 235: Datenblatt des Operationsverstärkers LM324, Seite 5
207
LM324, LM324A, LM224, LM2902, LM2902V
Figure 7. Voltage Reference
Figure 8. Wien Bridge Oscillator
50 k
R1
VCC
VCC
R2
5.0 k
–
10 k
1/4
MC1403
2.5 V
VCC
–
Vref
VO
LM324
+
1/4
VO
LM324
+
1
fo = 2 π RC
1
Vref = VCC
2
VO = 2.5 V
1+
R1
R2
Figure 9. High Impedance Differential Amplifier
1
CR
+
e1
1/4
R
R
C
C
Figure 10. Comparator with Hysteresis
R2
R
LM324
–
Hysteresis
–
a R1
R1
R1
1/4
eo
LM324
+
b R1
1/4
VOH
VO
Vref
+
Vin
LM324
–
1/4
1
CR
–
e2
For: fo = 1.0 kHz
R = 16 kΩ
C = 0.01 µF
VO
VOL
VinL
R1
(V – V ) + Vref
VinL =
R1 + R2 OL ref
LM324
+
R
VinH
Vref
R1
(V – V ) + Vref
VinH =
R1 + R2 OH ref
eo = C (1 + a + b) (e2 – e1)
H=
R1
(V – V )
R1 + R2 OH OL
Figure 11. Bi–Quad Filter
R
R
Vin
C1
R2
–
100 k
R1 = QR
R1
R2 =
TBP
R3 = TN R2
C
C
R
1/4
–
LM324
+
100 k
1/4
–
LM324
+
1/4
LM324
+
Vref
Bandpass
Output
Vref
R2
1
fo = 2 π RC
R3
Vref
R1
–
C1 = 10C
For:
For:
For:
For:
6
fo = 1.0 kHz
Q = 10
TBP = 1
TN = 1
C1
1/4
Notch Output
LM324
+
Vref
1
Vref = VCC
2
Where: TBP = Center Frequency Gain
Where: TN = Passband Notch Gain
R
C
R1
R2
R3
= 160 kΩ
= 0.001 µF
= 1.6 MΩ
= 1.6 MΩ
= 1.6 MΩ
MOTOROLA ANALOG IC DEVICE DATA
Abb. 236: Datenblatt des Operationsverstärkers LM324, Seite 6
208
LM324, LM324A, LM224, LM2902, LM2902V
Figure 12. Function Generator
1
Vref = VCC
2
Vref
Triangle Wave
Output
+
R2
C
Vin
+
R1
C
R3
–
LM324
–
R1
100 k
Vref
Square
Wave
Output
R1 + RC
4 CRf R1
if R3 =
R2 R1
R2 + R1
VO
LM324
+
R2
Vref
Rf
f =
CO
1/4
1/4
75 k
C
VCC
300 k
R3
1/4
LM324
–
Figure 13. Multiple Feedback Bandpass Filter
CO = 10 C
1
Vref = 2 VCC
Given: fo = center frequency
A(fo) = gain at center frequency
Choose value fo, C
Then:
R3 =
Q
π fo C
R1 =
R3
2 A(fo)
R2 =
R1 R3
4Q2 R1 – R3
For less than 10% error from operational amplifier,
Qo fo
< 0.1
BW
where fo and BW are expressed in Hz.
If source impedance varies, filter may be preceded with
voltage follower buffer to stabilize filter parameters.
MOTOROLA ANALOG IC DEVICE DATA
7
Abb. 237: Datenblatt des Operationsverstärkers LM324, Seite 7
209
BUZ10
N - CHANNEL ENHANCEMENT MODE
POWER MOS TRANSISTORS
TYPE
BUZ10
■
■
■
■
■
■
■
V DSS
R DS( on)
ID
50 V
< 0.07 Ω
20 A
TYPICAL RDS(on) = 0.06 Ω
AVALANCHE RUGGED TECHNOLOGY
100% AVALANCHE TESTED
REPETITIVE AVALANCHE DATA AT 100oC
LOW GATE CHARGE
HIGH CURRENT CAPABILITY
175oC OPERATING TEMPERATURE
APPLICATIONS
■
HIGH CURRENT, HIGH SPEED SWITCHING
■
SOLENOID AND RELAY DRIVERS
■
REGULATORS
■
DC-DC & DC-AC CONVERTERS
■
MOTOR CONTROL, AUDIO AMPLIFIERS
■
AUTOMOTIVE ENVIRONMENT (INJECTION,
ABS, AIR-BAG, LAMPDRIVERS, Etc.)
3
1
2
TO-220
INTERNAL SCHEMATIC DIAGRAM
ABSOLUTE MAXIMUM RATINGS
Symbol
VD S
V DG R
V GS
Value
Unit
Drain-source Voltage (V GS = 0)
Parameter
50
V
Drain- gate Voltage (R GS = 20 kΩ)
50
V
± 20
V
Gate-source Voltage
Drain Current (continuous) at T c = 25 oC
20
A
I DM
Drain Current (pulsed)
80
A
P tot
Total Dissipation at Tc = 25 o C
T stg
Storage Temperature
ID
Tj
Max. Operating Junction Temperature
DIN Humidity Category (DIN 40040)
IEC Climatic Category (DIN IEC 68-1)
80
W
-65 to 175
o
C
175
o
C
E
55/150/56
1/7
November 1996
Abb. 238: Datenblatt des Feldeffekttransistors BUZ10, Seite 1
210
BUZ10
THERMAL DATA
R thj-cas e
Rthj- amb
Thermal Resistance Junction-case
Thermal Resistance Junction-ambient
Max
Max
o
1.88
62.5
o
C/W
C/W
AVALANCHE CHARACTERISTICS
Symbol
Value
Unit
IA R
Avalanche Current, Repetitive or Not-Repetitive
(pulse width limited by T j max, δ < 1%)
Parameter
20
A
E AS
Single Pulse Avalanche Energy
(starting T j = 25 o C, ID = I AR, VD D = 25 V)
80
mJ
E AR
Repetitive Avalanche Energy
(pulse width limited by T j max, δ < 1%)
20
mJ
IA R
Avalanche Current, Repetitive or Not-Repetitive
(T c = 100 o C, pulse width limited by T j max, δ < 1%)
14
A
ELECTRICAL CHARACTERISTICS (Tcase = 25 oC unless otherwise specified)
OFF
Symbol
V( BR)DSS
Parameter
Drain-source
Breakdown Voltage
Test Conditions
I D = 250 µA
VG S = 0
I DS S
Zero Gate Voltage
V DS = Max Rating
Drain Current (V GS = 0) V DS = Max Rating
IG SS
Gate-body Leakage
Current (V D S = 0)
Min.
Typ.
Max.
50
Unit
V
Tj = 125 oC
V GS = ± 20 V
1
10
µA
µA
± 100
nA
ON (∗)
Symbol
Parameter
Test Conditions
V G S(th)
Gate Threshold Voltage V DS = V GS
ID = 1 mA
R DS( on)
Static Drain-source On
Resistance
ID = 13 A
V GS = 10V
Min.
Typ.
Max.
Unit
2.1
3
4
V
0.06
0.07
Ω
Min.
Typ.
Max.
Unit
6
11
DYNAMIC
Symbol
gfs (∗)
C iss
C oss
C rss
Parameter
Test Conditions
Forward
Transconductance
V DS = 25 V
ID = 13 A
Input Capacitance
Output Capacitance
Reverse Transfer
Capacitance
V DS = 25 V
f = 1 MHz
VG S = 0
S
520
250
80
700
350
120
pF
pF
pF
Typ.
Max.
Unit
45
65
115
80
65
95
160
120
ns
ns
ns
ns
SWITCHING
Symbol
t d(on)
tr
t d(off )
tf
Parameter
Turn-on Time
Rise Time
Turn-off Delay Time
Fall Time
Test Conditions
V DD = 30 V
R GS = 50 Ω
ID = 3 A
V GS = 10 V
Min.
2/7
Abb. 239: Datenblatt des Feldeffekttransistors BUZ10, Seite 2
211
BUZ10
ELECTRICAL CHARACTERISTICS (continued)
SOURCE DRAIN DIODE
Symbol
Parameter
Test Conditions
I SD M
Source-drain Current
Source-drain Current
(pulsed)
V S D (∗)
Forward On Voltage
I SD = 40 A
Reverse Recovery
Time
Reverse Recovery
Charge
I SD = 20 A di/dt = 100 A/µs
V DD = 15 V T j = 150 o C
IS D
t rr
Q rr
Min.
Typ.
VG S = 0
Max.
Unit
20
80
A
A
2
V
85
ns
0.13
µC
(∗) Pulsed: Pulse duration = 300 µs, duty cycle 1.5 %
Safe Operating Area
Thermal Impedance
Derating Curve
Output Characteristics
3/7
Abb. 240: Datenblatt des Feldeffekttransistors BUZ10, Seite 3
212
SEMICONDUCTOR TECHNICAL DATA
L SUFFIX
CERAMIC
CASE 632
The MC14007UB multi–purpose device consists of three N–channel and
three P–channel enhancement mode devices packaged to provide access to
each device. These versatile parts are useful in inverter circuits, pulse–
shapers, linear amplifiers, high input impedance amplifiers, threshold
detectors, transmission gating, and functional gating.
P SUFFIX
PLASTIC
CASE 646
• Diode Protection on All Inputs
• Supply Voltage Range = 3.0 Vdc to 18 Vdc
• Capable of Driving Two Low–power TTL Loads or One Low–power
Schottky TTL Load Over the Rated Temperature Range
• Pin–for–Pin Replacement for CD4007A or CD4007UB
• This device has 2 outputs without ESD Protection. Anti–static
precautions must be taken.
D SUFFIX
SOIC
CASE 751A
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎ
ORDERING INFORMATION
MC14XXXUBCP
MC14XXXUBCL
MC14XXXUBD
MAXIMUM RATINGS* (Voltages Referenced to VSS)
Symbol
VDD
Parameter
DC Supply Voltage
Value
Unit
– 0.5 to + 18.0
V
Vin, Vout
Input or Output Voltage (DC or Transient)
– 0.5 to VDD + 0.5
V
lin, lout
Input or Output Current (DC or Transient),
per Pin
± 10
mA
PD
Power Dissipation, per Package†
Tstg
Storage Temperature
TL
TA = – 55° to 125°C for all packages.
PIN ASSIGNMENT
500
mW
D–PB
1
14
VDD
– 65 to + 150
_C
S–PB
2
13
D–PA
260
_C
GATEB
3
12
OUTC
S–NB
4
11
S–PC
D–NB
5
10
GATEC
GATEA
6
9
S–NC
VSS
7
8
D–NA
Lead Temperature (8–Second Soldering)
* Maximum Ratings are those values beyond which damage to the device may occur.
†Temperature Derating:
Plastic “P and D/DW” Packages: – 7.0 mW/_C From 65_C To 125_C
Ceramic “L” Packages: – 12 mW/_C From 100_C To 125_C
A
A
12
B
C
B
2
3
1
0
8
6
Substrates of P–channel devices internally
connected to VDD; substrates of N–channel
devices internally connected to VSS.
2
1
11
6
12
13
INPUT
A = C, B = OPEN
A = B, C = OPEN
13
C
11
INPUT OUTPUT CONDITION
SCHEMATIC
14
4
5
VDD
14
D = DRAIN
S = SOURCE
9
1
INPUT
Plastic
Ceramic
SOIC
7
10
VSS
7
8
3
4
5
VDD = PIN 14
VSS = PIN 7
10
9
Figure 1. Typical Application: 2–Input Analog Multiplexer
REV 3
1/94
MOTOROLA
Motorola, Inc. 1995
CMOS LOGIC DATA
MC14007UB
31
Abb. 241: Datenblatt des CMOS-Inverters 4007, Seite 1
213
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎ
ELECTRICAL CHARACTERISTICS (Voltages Referenced to VSS)
Characteristic
– 55_C
25_C
125_C
VDD
Vdc
Min
Max
Min
Typ #
Max
Min
Max
Unit
Output Voltage
Vin = VDD or 0
“0” Level
VOL
5.0
10
15
—
—
—
0.05
0.05
0.05
—
—
—
0
0
0
0.05
0.05
0.05
—
—
—
0.05
0.05
0.05
Vdc
Vin = 0 or VDD
“1” Level
VOH
5.0
10
15
4.95
9.95
14.95
—
—
—
4.95
9.95
14.95
5.0
10
15
—
—
—
4.95
9.95
14.95
—
—
—
Vdc
“0” Level
VIL
5.0
10
15
—
—
—
1.0
2.0
2.5
—
—
—
2.25
4.50
6.75
1.0
2.0
2.5
—
—
—
1.0
2.0
2.5
5.0
10
15
4.0
8.0
12.5
—
—
—
4.0
8.0
12.5
2.75
5.50
8.25
—
—
—
4.0
8.0
12.5
—
—
—
5.0
5.0
10
15
– 3.0
– 0.64
– 1.6
– 4.2
—
—
—
—
– 2.4
– 0.51
– 1.3
– 3.4
– 5.0
– 1.0
– 2.5
– 10
—
—
—
—
– 1.7
– 0.36
– 0.9
– 2.4
—
—
—
—
IOL
5.0
10
15
0.64
1.6
4.2
—
—
—
0.51
1.3
3.4
1.0
2.5
10
—
—
—
0.36
0.9
2.4
—
—
—
mAdc
Input Current
Iin
15
—
± 0.1
—
± 0.00001
± 0.1
—
± 1.0
µAdc
Input Capacitance
(Vin = 0)
Cin
—
—
—
—
5.0
7.5
—
—
pF
Quiescent Current
(Per Package)
IDD
5.0
10
15
—
—
—
0.25
0.5
1.0
—
—
—
0.0005
0.0010
0.0015
0.25
0.5
1.0
—
—
—
7.5
15
30
µAdc
IT
5.0
10
15
Input Voltage
(VO = 4.5 Vdc)
(VO = 9.0 Vdc)
(VO = 13.5 Vdc)
(VO = 0.5 Vdc)
(VO = 1.0 Vdc)
(VO = 1.5 Vdc)
Output Drive Current
(VOH = 2.5 Vdc)
(VOH = 4.6 Vdc)
(VOH = 9.5 Vdc)
(VOH = 13.5 Vdc)
Symbol
“1” Level
VIH
Vdc
IOH
Source
(VOL = 0.4 Vdc)
(VOL = 0.5 Vdc)
(VOL = 1.5 Vdc)
Sink
Total Supply Current**†
(Dynamic plus Quiescent,
Per Gate) (CL = 50 pF)
Vdc
mAdc
IT = (0.7 µA/kHz) f + IDD/6
IT = (1.4 µA/kHz) f + IDD/6
IT = (2.2 µA/kHz) f + IDD/6
µAdc
#Data labelled “Typ” is not to be used for design purposes but is intended as an indication of the IC’s potential performance.
** The formulas given are for the typical characteristics only at 25_C.
†To calculate total supply current at loads other than 50 pF:
IT(CL) = IT(50 pF) + (CL – 50) Vfk
where: IT is in µA (per package), CL in pF, V = (VDD – VSS) in volts, f in kHz is input frequency, and k = 0.003.
This device contains protection circuitry to guard against damage due to high static voltages or electric fields. However,
precautions must be taken to avoid applications of any voltage higher than maximum rated voltages to this high-impedance
circuit. For proper operation, Vin and Vout should be constrained to the range VSS ≤ (Vin or Vout) ≤ VDD.
Unused inputs must always be tied to an appropriate logic voltage level (e.g., either VSS or VDD). Unused outputs must
be left open.
MC14007UB
32
MOTOROLA CMOS LOGIC DATA
Abb. 242: Datenblatt des CMOS-Inverters 4007, Seite 2
214
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎ
SWITCHING CHARACTERISTICS* (CL = 50 pF, TA = 25_C)
Characteristic
Symbol
Output Rise Time
tTLH = (1.2 ns/pF) CL + 30 ns
tTLH = (0.5 ns/pF) CL + 20 ns
tTLH = (0.4 ns/pF) CL + 15 ns
tTLH
Output Fall Time
tTHL = (1.2 ns/pF) CL + 15 ns
tTHL = (0.5 ns/pF) CL + 15 ns
tTHL = (0.4 ns/pF) CL + 10 ns
tTHL
Turn–Off Delay Time
tPLH = (1.5 ns/pF) CL + 35 ns
tPLH = (0.2 ns/pF) CL + 20 ns
tPLH = (0.15 ns/pF) CL + 17.5 ns
tPLH
Turn–On Delay Time
tPHL = (1.0 ns/pF) CL + 10 ns
tPHL = (0.3 ns/pF) CL + 15 ns
tPHL = (0.2 ns/pF) CL + 15 ns
tPHL
VDD
Vdc
Min
Typ #
Max
5.0
10
15
—
—
—
90
45
35
180
90
70
5.0
10
15
—
—
—
75
40
30
150
80
60
5.0
10
15
—
—
—
60
30
25
125
75
55
5.0
10
15
—
—
—
60
30
25
125
75
55
Unit
ns
ns
ns
ns
* The formulas given are for the typical characteristics only. Switching specifications are for device connected as an inverter.
#Data labelled “Typ” is not to be used for design purposes but is intended as an indication of the IC’s potential performance.
VDD = – VGS
VDD = VGS
14
IOH
7
14
VDS = VOH – VDD
IOL
VSS
7
All unused inputs connected to ground.
All unused inputs connected to ground.
20
VGS = – 5.0 Vdc
a TA = – 55°C
b TA = + 25°C
c TA = + 125°C
– 8.0
b
a
c
b
– 12
b
c
– 10 Vdc
– 16
– 15 Vdc
a
a
– 20
– 10
a
VGS = 15 Vdc
b
c
IOL , DRAIN CURRENT (mAdc)
IOH , DRAIN CURRENT (mAdc)
0
– 4.0
VDS = VOL
VSS
c
16
a
10 Vdc
12
b
c
a TA = – 55°C
b TA = + 25°C
c TA = + 125°C
8.0
a
4.0
b 5.0 Vdc
c
0
– 8.0
– 6.0
– 4.0
VDS, DRAIN VOLTAGE (Vdc)
– 2.0
–0
Figure 2. Typical Output Source Characteristics
0
2.0
4.0
6.0
VDS, DRAIN VOLTAGE (Vdc)
8.0
10
Figure 3. Typical Output Sink Characteristics
These typical curves are not guarantees, but are design aids.
Caution: The maximum current rating is 10 mA per pin.
MOTOROLA CMOS LOGIC DATA
MC14007UB
33
Abb. 243: Datenblatt des CMOS-Inverters 4007, Seite 3
215
SEMICONDUCTOR TECHNICAL DATA
The MC14069UB hex inverter is constructed with MOS P–channel and
N–channel enhancement mode devices in a single monolithic structure.
These inverters find primary use where low power dissipation and/or high
noise immunity is desired. Each of the six inverters is a single stage to
minimize propagation delays.
L SUFFIX
CERAMIC
CASE 632
• Supply Voltage Range = 3.0 Vdc to 18 Vdc
• Capable of Driving Two Low–Power TTL Loads or One Low–Power
Schottky TTL Load Over the Rated Temperature Range
• Triple Diode Protection on All Inputs (see Page 5–2)
• Pin–for–Pin Replacement for CD4069UB
• Meets JEDEC UB Specifications
P SUFFIX
PLASTIC
CASE 646
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
D SUFFIX
SOIC
CASE 751A
MAXIMUM RATINGS* (Voltages Referenced to VSS)
Symbol
VDD
Parameter
DC Supply Voltage
Value
Unit
– 0.5 to + 18.0
V
ORDERING INFORMATION
MC14XXXUBCP
MC14XXXUBCL
MC14XXXUBD
Vin, Vout
Input or Output Voltage (DC or Transient)
– 0.5 to VDD + 0.5
V
Iin, Iout
Input or Output Current (DC or Transient),
per Pin
± 10
mA
PD
Power Dissipation, per Package†
500
mW
Tstg
Storage Temperature
– 65 to + 150
_C
260
_C
TL
Lead Temperature (8–Second Soldering)
TA = – 55° to 125°C for all packages.
PIN ASSIGNMENT
* Maximum Ratings are those values beyond which damage to the device may occur.
†Temperature Derating:
Plastic “P and D/DW” Packages: – 7.0 mW/_C From 65_C To 125_C
Ceramic “L” Packages: – 12 mW/_C From 100_C To 125_C
LOGIC DIAGRAM
1
3
4
5
6
9
8
11
10
13
CIRCUIT SCHEMATIC
(1/6 OF CIRCUIT SHOWN)
2
VDD
IN 1
1
14
VDD
OUT 1
2
13
IN 6
IN 2
3
12
OUT 6
OUT 2
4
11
IN 5
OUT 5
IN 3
5
10
OUT 3
6
9
IN 4
VSS
7
8
OUT 4
VDD = PIN 14
VSS = PIN 7
INPUT*
OUTPUT
VSS
* Double diode protection on all
inputs not shown.
12
20 ns
PULSE
GENERATOR
Plastic
Ceramic
SOIC
VDD
14
OUTPUT
INPUT
INPUT
7
VSS
CL
20 ns
VDD
90%
50%
10%
tPHL
tPLH
90%
50%
10%
OUTPUT
tTHL
VSS
VOH
VOL
tTLH
Figure 1. Switching Time Test Circuit and Waveforms
REV 3
1/94
CMOS LOGIC DATA
MOTOROLA
Motorola, Inc. 1995
MC14069UB
1
Abb. 244: Datenblatt des CMOS-Inverters 4069, Seite 1
216
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎÎ
ÎÎÎ
ÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎÎ
ELECTRICAL CHARACTERISTICS (Voltages Referenced to VSS)
Characteristic
– 55_C
25_C
125_C
Min
Max
Min
Typ #
Max
Min
Max
Unit
Output Voltage
Vin = VDD
“0” Level
VOL
5.0
10
15
—
—
—
0.05
0.05
0.05
—
—
—
0
0
0
0.05
0.05
0.05
—
—
—
0.05
0.05
0.05
Vdc
Vin = 0
“1” Level
VOH
5.0
10
15
4.95
9.95
14.95
—
—
—
4.95
9.95
14.95
5.0
10
15
—
—
—
4.95
9.95
14.95
—
—
—
Vdc
“0” Level
VIL
5.0
10
15
—
—
—
1.0
2.0
2.5
—
—
—
2.25
4.50
6.75
1.0
2.0
2.5
—
—
—
1.0
2.0
2.5
5.0
10
15
4.0
8.0
12.5
—
—
—
4.0
8.0
12.5
2.75
5.50
8.25
—
—
—
4.0
8.0
12.5
—
—
—
5.0
5.0
10
15
– 3.0
– 0.64
– 1.6
– 4.2
—
—
—
—
– 2.4
– 0.51
– 1.3
– 3.4
– 4.2
– 0.88
– 2.25
– 8.8
—
—
—
—
– 1.7
– 0.36
– 0.9
– 2.4
—
—
—
—
IOL
5.0
10
15
0.64
1.6
4.2
—
—
—
0.51
1.3
3.4
0.88
2.25
8.8
—
—
—
0.36
0.9
2.4
—
—
—
mAdc
Input Current
Iin
15
—
± 0.1
—
± 0.00001
± 0.1
—
± 1.0
µAdc
Input Capacitance
(Vin = 0)
Cin
—
—
—
—
5.0
7.5
—
—
pF
Quiescent Current
(Per Package)
IDD
5.0
10
15
—
—
—
0.25
0.5
1.0
—
—
—
0.0005
0.0010
0.0015
0.25
0.5
1.0
—
—
—
7.5
15
30
µAdc
IT
5.0
10
15
Input Voltage
(VO = 4.5 Vdc)
(VO = 9.0 Vdc)
(VO = 13.5 Vdc)
Symbol
VDD
Vdc
“1” Level
VIH
(VO = 0.5 Vdc)
(VO = 1.0 Vdc)
(VO = 1.5 Vdc)
Output Drive Current
(VOH = 2.5 Vdc)
(VOH = 4.6 Vdc)
(VOH = 9.5 Vdc)
(VOH = 13.5 Vdc)
(VOL = 0.4 Vdc)
(VOL = 0.5 Vdc)
(VOL = 1.5 Vdc)
Vdc
Vdc
IOH
Source
Sink
Total Supply Current**†
(Dynamic plus Quiescent,
Per Gate) (CL = 50 pF)
Output Rise and Fall Times**
(CL = 50 pF)
tTLH, tTHL = (1.35 ns/pF) CL + 33 ns
tTLH, tTHL = (0.60 ns/pF) CL + 20 ns
tTLH, tTHL = (0.40 ns/pF) CL + 20 ns
tTLH,
tTHL
Propagation Delay Times**
(CL = 50 pF)
tPLH, tPHL = (0.90 ns/pF) CL + 20 ns
tPLH, tPHL = (0.36 ns/pF) CL + 22 ns
tPLH, tPHL = (0.26 ns/pF) CL + 17 ns
tPLH,
tPHL
mAdc
IT = (0.3 µA/kHz) f + IDD/6
IT = (0.6 µA/kHz) f + IDD/6
IT = (0.9 µA/kHz) f + IDD/6
µAdc
ns
5.0
10
15
—
—
—
—
—
—
—
—
—
100
50
40
200
100
80
—
—
—
—
—
—
ns
5.0
10
15
—
—
—
—
—
—
—
—
—
65
40
30
125
75
55
—
—
—
—
—
—
#Data labelled “Typ” is not to be used for design purposes but is intended as an indication of the IC’s potential performance.
** The formulas given are for the typical characteristics only at 25_C.
†To calculate total supply current at loads other than 50 pF:
IT(CL) = IT(50 pF) + (CL – 50) Vfk
where: IT is in µA (per package), CL in pF, V = (VDD – VSS) in volts, f in kHz is input frequency, and k = 0.002.
This device contains protection circuitry to guard against damage due to high static voltages or electric fields. However,
precautions must be taken to avoid applications of any voltage higher than maximum rated voltages to this high-impedance
circuit. For proper operation, Vin and Vout should be constrained to the range VSS ≤ (Vin or Vout) ≤ VDD.
Unused inputs must always be tied to an appropriate logic voltage level (e.g., either VSS or VDD). Unused outputs must
be left open.
MC14069UB
2
MOTOROLA CMOS LOGIC DATA
Abb. 245: Datenblatt des CMOS-Inverters 4069, Seite 2
217
SN54/74LS00
QUAD 2-INPUT NAND GATE
• ESD > 3500 Volts
QUAD 2-INPUT NAND GATE
LOW POWER SCHOTTKY
VCC
14
13
12
11
10
9
8
J SUFFIX
CERAMIC
CASE 632-08
1
2
3
4
5
6
14
7
1
GND
N SUFFIX
PLASTIC
CASE 646-06
14
1
14
1
D SUFFIX
SOIC
CASE 751A-02
ORDERING INFORMATION
SN54LSXXJ
SN74LSXXN
SN74LSXXD
Ceramic
Plastic
SOIC
GUARANTEED OPERATING RANGES
Parameter
Symbol
Min
Typ
Max
Unit
VCC
Supply Voltage
54
74
4.5
4.75
5.0
5.0
5.5
5.25
V
TA
Operating Ambient Temperature Range
54
74
– 55
0
25
25
125
70
°C
IOH
Output Current — High
54, 74
– 0.4
mA
IOL
Output Current — Low
54
74
4.0
8.0
mA
FAST AND LS TTL DATA
5-2
Abb. 246: Datenblatt des TTL-NAND GATE SN74LS00, Seite 1
218
SN54/74LS00
DC CHARACTERISTICS OVER OPERATING TEMPERATURE RANGE (unless otherwise specified)
Limits
S b l
Symbol
VIH
Input HIGH Voltage
VIL
Input LOW Voltage
VIK
Input Clamp Diode Voltage
VOH
Output HIGH Voltage
VOL
Output LOW Voltage
IIH
Input HIGH Current
IIL
Input LOW Current
IOS
Short Circuit Current (Note 1)
ICC
Min
P
Parameter
Typ
Max
2.0
54
0.7
74
0.8
– 0.65
– 1.5
U i
Unit
T
Test
C
Conditions
di i
V
Guaranteed Input HIGH Voltage for
All Inputs
V
Guaranteed Input
p LOW Voltage
g for
All Inputs
V
VCC = MIN, IIN = – 18 mA
54
2.5
3.5
V
74
2.7
3.5
V
VCC = MIN,, IOH = MAX,, VIN = VIH
or VIL per Truth Table
54, 74
0.25
0.4
V
IOL = 4.0 mA
74
0.35
0.5
V
IOL = 8.0 mA
VCC = VCC MIN,
VIN = VIL or VIH
per Truth Table
20
µA
VCC = MAX, VIN = 2.7 V
0.1
mA
VCC = MAX, VIN = 7.0 V
– 0.4
mA
VCC = MAX, VIN = 0.4 V
–100
mA
VCC = MAX
Power Supply Current
Total, Output HIGH
1.6
mA
VCC = MAX
Total, Output LOW
4.4
– 20
Note 1: Not more than one output should be shorted at a time, nor for more than 1 second.
AC CHARACTERISTICS (TA = 25°C)
Limits
S b l
Symbol
P
Parameter
Min
Typ
Max
U i
Unit
T
Test
C
Conditions
di i
VCC = 5.0 V
CL = 15 pF
tPLH
Turn-Off Delay, Input to Output
9.0
15
ns
tPHL
Turn-On Delay, Input to Output
10
15
ns
FAST AND LS TTL DATA
5-3
Abb. 247: Datenblatt des TTL-NAND GATE SN74LS00, Seite 2
219
SN54/74LS02
QUAD 2-INPUT NOR GATE
QUAD 2-INPUT NOR GATE
VCC
14
1
LOW POWER SCHOTTKY
13
2
12
11
3
4
10
5
9
6
8
J SUFFIX
CERAMIC
CASE 632-08
7
14
GND
1
N SUFFIX
PLASTIC
CASE 646-06
14
1
14
1
D SUFFIX
SOIC
CASE 751A-02
ORDERING INFORMATION
SN54LSXXJ
SN74LSXXN
SN74LSXXD
Ceramic
Plastic
SOIC
GUARANTEED OPERATING RANGES
Symbol
Parameter
Min
Typ
Max
Unit
VCC
Supply Voltage
54
74
4.5
4.75
5.0
5.0
5.5
5.25
V
TA
Operating Ambient Temperature Range
54
74
– 55
0
25
25
125
70
°C
IOH
Output Current — High
54, 74
– 0.4
mA
IOL
Output Current — Low
54
74
4.0
8.0
mA
FAST AND LS TTL DATA
5-1
Abb. 248: Datenblatt des TTL-NOR GATE SN74LS02, Seite 1
220
SN54/74LS02
DC CHARACTERISTICS OVER OPERATING TEMPERATURE RANGE (unless otherwise specified)
Limits
S b l
Symbol
VIH
Input HIGH Voltage
VIL
Input LOW Voltage
VIK
Input Clamp Diode Voltage
Typ
Max
2.0
VOH
Output HIGH Voltage
VOL
Output LOW Voltage
IIH
Input HIGH Current
IIL
Input LOW Current
IOS
Short Circuit Current (Note 1)
ICC
Min
P
Parameter
54
0.7
74
0.8
– 0.65
– 1.5
U i
Unit
T
Test
C
Conditions
di i
V
Guaranteed Input HIGH Voltage for
All Inputs
V
Guaranteed Input
p LOW Voltage
g for
All Inputs
V
VCC = MIN, IIN = – 18 mA
54
2.5
3.5
V
74
2.7
3.5
V
VCC = MIN,, IOH = MAX,, VIN = VIH
or VIL per Truth Table
54, 74
0.25
0.4
V
IOL = 4.0 mA
74
0.35
0.5
V
IOL = 8.0 mA
VCC = VCC MIN,
VIN = VIL or VIH
per Truth Table
20
µA
VCC = MAX, VIN = 2.7 V
0.1
mA
VCC = MAX, VIN = 7.0 V
– 0.4
mA
VCC = MAX, VIN = 0.4 V
–100
mA
VCC = MAX
Power Supply Current
Total, Output HIGH
3.2
mA
VCC = MAX
Total, Output LOW
5.4
– 20
Note 1: Not more than one output should be shorted at a time, nor for more than 1 second.
AC CHARACTERISTICS (TA = 25°C)
Limits
S b l
Symbol
P
Parameter
Min
Typ
Max
U i
Unit
T
Test
C
Conditions
di i
VCC = 5.0 V
CL = 15 pF
tPLH
Turn-Off Delay, Input to Output
10
15
ns
tPHL
Turn-On Delay, Input to Output
10
15
ns
FAST AND LS TTL DATA
5-2
Abb. 249: Datenblatt des TTL-NOR GATE SN74LS02, Seite 2
221
SN54/74LS30
8-INPUT NAND GATE
8-INPUT NAND GATE
VCC
14
1
LOW POWER SCHOTTKY
13
2
12
11
3
4
10
5
9
6
8
J SUFFIX
CERAMIC
CASE 632-08
7
14
GND
1
N SUFFIX
PLASTIC
CASE 646-06
14
1
14
1
D SUFFIX
SOIC
CASE 751A-02
ORDERING INFORMATION
SN54LSXXJ
SN74LSXXN
SN74LSXXD
Ceramic
Plastic
SOIC
GUARANTEED OPERATING RANGES
Parameter
Symbol
Min
Typ
Max
Unit
VCC
Supply Voltage
54
74
4.5
4.75
5.0
5.0
5.5
5.25
V
TA
Operating Ambient Temperature Range
54
74
– 55
0
25
25
125
70
°C
IOH
Output Current — High
54, 74
– 0.4
mA
IOL
Output Current — Low
54
74
4.0
8.0
mA
FAST AND LS TTL DATA
5-1
Abb. 250: Datenblatt des TTL-NAND GATE SN74LS30, Seite 1
222
SN54/74LS30
DC CHARACTERISTICS OVER OPERATING TEMPERATURE RANGE (unless otherwise specified)
Limits
S b l
Symbol
VIH
Input HIGH Voltage
VIL
Input LOW Voltage
VIK
Input Clamp Diode Voltage
Typ
Max
2.0
VOH
Output HIGH Voltage
VOL
Output LOW Voltage
IIH
Input HIGH Current
IIL
Input LOW Current
IOS
Short Circuit Current (Note 1)
ICC
Min
P
Parameter
54
0.7
74
0.8
– 0.65
– 1.5
U i
Unit
T
Test
C
Conditions
di i
V
Guaranteed Input HIGH Voltage for
All Inputs
V
Guaranteed Input
p LOW Voltage
g for
All Inputs
V
VCC = MIN, IIN = – 18 mA
54
2.5
3.5
V
74
2.7
3.5
V
VCC = MIN,, IOH = MAX,, VIN = VIH
or VIL per Truth Table
54, 74
0.25
0.4
V
IOL = 4.0 mA
74
0.35
0.5
V
IOL = 8.0 mA
VCC = VCC MIN,
VIN = VIL or VIH
per Truth Table
20
µA
VCC = MAX, VIN = 2.7 V
0.1
mA
VCC = MAX, VIN = 7.0 V
– 0.4
mA
VCC = MAX, VIN = 0.4 V
–100
mA
VCC = MAX
Power Supply Current
Total, Output HIGH
0.5
mA
VCC = MAX
Total, Output LOW
1.1
– 20
Note 1: Not more than one output should be shorted at a time, nor for more than 1 second.
AC CHARACTERISTICS (TA = 25°C)
Limits
S b l
Symbol
P
Parameter
Min
Typ
Max
U i
Unit
T
Test
C
Conditions
di i
VCC = 5.0 V
CL = 15 pF
tPLH
Turn-Off Delay, Input to Output
8.0
15
ns
tPHL
Turn-On Delay, Input to Output
13
20
ns
FAST AND LS TTL DATA
5-2
Abb. 251: Datenblatt des TTL-NAND GATE SN74LS30, Seite 2
223
SN54/74LS32
QUAD 2-INPUT OR GATE
QUAD 2-INPUT OR GATE
VCC
14
1
LOW POWER SCHOTTKY
13
2
12
11
3
4
10
5
9
6
8
J SUFFIX
CERAMIC
CASE 632-08
7
14
GND
1
N SUFFIX
PLASTIC
CASE 646-06
14
1
14
1
D SUFFIX
SOIC
CASE 751A-02
ORDERING INFORMATION
SN54LSXXJ
SN74LSXXN
SN74LSXXD
Ceramic
Plastic
SOIC
GUARANTEED OPERATING RANGES
Parameter
Symbol
Min
Typ
Max
Unit
VCC
Supply Voltage
54
74
4.5
4.75
5.0
5.0
5.5
5.25
V
TA
Operating Ambient Temperature Range
54
74
– 55
0
25
25
125
70
°C
IOH
Output Current — High
54, 74
– 0.4
mA
IOL
Output Current — Low
54
74
4.0
8.0
mA
FAST AND LS TTL DATA
5-1
Abb. 252: Datenblatt des TTL-OR GATE SN74LS32, Seite 1
224
SN54/74LS32
DC CHARACTERISTICS OVER OPERATING TEMPERATURE RANGE (unless otherwise specified)
Limits
S b l
Symbol
VIH
Input HIGH Voltage
VIL
Input LOW Voltage
VIK
Input Clamp Diode Voltage
Typ
Max
2.0
VOH
Output HIGH Voltage
VOL
Output LOW Voltage
IIH
Input HIGH Current
IIL
Input LOW Current
IOS
Short Circuit Current (Note 1)
ICC
Min
P
Parameter
54
0.7
74
0.8
– 0.65
– 1.5
U i
Unit
T
Test
C
Conditions
di i
V
Guaranteed Input HIGH Voltage for
All Inputs
V
Guaranteed Input
p LOW Voltage
g for
All Inputs
V
VCC = MIN, IIN = – 18 mA
54
2.5
3.5
V
74
2.7
3.5
V
VCC = MIN,, IOH = MAX,, VIN = VIH
or VIL per Truth Table
54, 74
0.25
0.4
V
IOL = 4.0 mA
74
0.35
0.5
V
IOL = 8.0 mA
VCC = VCC MIN,
VIN = VIL or VIH
per Truth Table
20
µA
VCC = MAX, VIN = 2.7 V
0.1
mA
VCC = MAX, VIN = 7.0 V
– 0.4
mA
VCC = MAX, VIN = 0.4 V
–100
mA
VCC = MAX
Power Supply Current
Total, Output HIGH
6.2
mA
VCC = MAX
Total, Output LOW
9.8
– 20
Note 1: Not more than one output should be shorted at a time, nor for more than 1 second.
AC CHARACTERISTICS (TA = 25°C)
Limits
S b l
Symbol
P
Parameter
Min
Typ
Max
U i
Unit
T
Test
C
Conditions
di i
VCC = 5.0 V
CL = 15 pF
tPLH
Turn-Off Delay, Input to Output
14
22
ns
tPHL
Turn-On Delay, Input to Output
14
22
ns
FAST AND LS TTL DATA
5-2
Abb. 253: Datenblatt des TTL-OR GATE SN74LS32, Seite 2
225
Anhang J
Vorsatzzeichen
In vielen praktischen Fällen sind die Grundeinheiten zu groß oder zu klein. Nachfolgend einige gebräuchliche Vorsatzzeichen.
Beispiel: 0.000001 A = 1 · 10−6 A = 1 µA
Y
Z
E
P
T
G
M
k
h
da
=
=
=
=
=
=
=
=
=
=
Yotta
Zetta
Exa
Peta
Tera
Giga
Mega
kilo
hekto
Deka
=
=
=
=
=
=
=
=
=
=
1024
1021
1018
1015
1012
109
106
103
102
101
y
z
a
f
p
n
µ
m
c
d
=
=
=
=
=
=
=
=
=
=
Yocto
Zepto
Atto
femto
piko
Nano
Mikro
Milli
Zenti
Dezi
=
=
=
=
=
=
=
=
=
=
10−24
10−21
10−18
10−15
10−12
10−9
10−6
10−3
10−2
10−1
226
Anhang K
Hilfsblätter
Für einige Versuche wird u. a. auch Millimeterpapier benötigt. Die abgebildeten Hilfsblätter sind als Kopiervorlage zu betrachten.
227
Zeitkoeffizient
Zeitkoeffizient
Y-Verstaerkung
Y-Verstaerkung
Aufgabe
Aufgabe
Zeitkoeffizient
Zeitkoeffizient
Y-Verstaerkung
Y-Verstaerkung
Aufgabe
Aufgabe
Zeitkoeffizient
Zeitkoeffizient
Y-Verstaerkung
Y-Verstaerkung
Aufgabe
Aufgabe
228
Literaturverzeichnis
[CW93] Clausert, Horst und Gunter Wiesemann: Grundgebiete der Elektrotechnik 1. Oldenbourg, 1993.
230