Zusammenfassung Theo C
Werbung

Zusammenfassung der
Theoretischen Physik C
Autor:
Lucas Kunz
11. März 2016
INHALTSVERZEICHNIS
2
Inhaltsverzeichnis
1 Einleitung
5
2 Mathematische Grundlagen
2.1 Differentialrechnung und Vektoranalysis
2.2 Integralsätze . . . . . . . . . . . . . . . .
2.3 Delta-Distribution . . . . . . . . . . . .
2.4 Greensche Funktion . . . . . . . . . . . .
2.5 Kugelflächenfunktionen . . . . . . . . . .
2.6 Fouriertransformation . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
10
11
12
13
15
3 Elektrostatik im Vakuum
3.1 Coulombesches Gesetz . . . . . . . . . . . . . . . . . . . . .
3.2 Elektrisches Feld . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Gauß-Gesetz (Durchflutungsgesetz, 1. Maxwellgleichung) . .
3.4 Elektrisches Potential . . . . . . . . . . . . . . . . . . . . . .
3.5 Energie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6 2. Maxwellgleichung . . . . . . . . . . . . . . . . . . . . . . .
3.7 Felder ausgewählter Geometrien . . . . . . . . . . . . . . . .
3.7.1 Geladene Kugelschale . . . . . . . . . . . . . . . . . .
3.7.2 Unendlich langer dünner Draht . . . . . . . . . . . .
3.7.3 Unendlich ausgedehnte Fläche . . . . . . . . . . . . .
3.7.4 Plattenkondensator . . . . . . . . . . . . . . . . . . .
3.8 Übergangsbedingungen . . . . . . . . . . . . . . . . . . . . .
3.9 Die Poissongleichung . . . . . . . . . . . . . . . . . . . . . .
3.10 Ausgewählte Potentialprobleme . . . . . . . . . . . . . . . .
3.10.1 Unendlich ausgedehnter homogen geladener Zylinder
3.10.2 Elektrischer Dipol . . . . . . . . . . . . . . . . . . . .
3.11 Multipolentwicklung . . . . . . . . . . . . . . . . . . . . . .
3.11.1 Moment 0. Ordnung . . . . . . . . . . . . . . . . . .
3.11.2 Moment 1. Ordnung . . . . . . . . . . . . . . . . . .
3.11.3 Moment 2. Ordnung . . . . . . . . . . . . . . . . . .
3.11.4 Entwicklung in krummlinigen Koordinaten . . . . . .
3.12 Potentielle Energie und Energiedichte . . . . . . . . . . . . .
3.12.1 Innere Energie einer Ladungswolke . . . . . . . . . .
3.12.2 Äußere Energie zweier Ladungswolken . . . . . . . .
3.12.3 Energie einer Ladungsverteilung im äußeren Feld . .
3.12.4 Dipol-Dipol-Wechselwirkung . . . . . . . . . . . . . .
3.12.5 Kraft auf Ladung im äußeren Feld . . . . . . . . . . .
3.12.6 Drehmoment auf Ladung im äußeren Feld . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
19
19
19
19
20
20
20
21
21
21
22
22
22
23
24
24
24
26
27
27
28
28
29
29
30
31
31
32
32
.
.
.
.
.
.
33
33
33
34
34
35
35
4 Elektrostatik mit Leitern
4.1 Oberflächenladungen . . . . . . . . .
4.2 Anwendung der Greenschen Funktion
4.3 Erste Grundaufgabe . . . . . . . . .
4.4 Zweite Grundaufgabe . . . . . . . . .
4.5 Beispiele zur Berechnung . . . . . . .
4.5.1 Halbraum als Leiter . . . . .
THEORETISCHE PHYSIK C
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
INHALTSVERZEICHNIS
4.6
4.7
3
4.5.2 Kugel als Leiter . . . . . .
Raumladungsfreie Probleme . . .
4.6.1 Beispiel: Zwei Leiter . . .
4.6.2 Beispiel: Kugelkondensator
Energie und Kraft . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5 Elektrostatik mit Dielektrika
5.1 Die Dielektrische Verschiebung (D-Feld) . . . . .
5.2 Übergangsbedingungen . . . . . . . . . . . . . . .
5.3 Potentialberechnung . . . . . . . . . . . . . . . .
5.4 Raumladungsfreie Probleme . . . . . . . . . . . .
5.4.1 Homogen polarisierte Kugel . . . . . . . .
5.4.2 Kugelförmiger Hohlraum im Dielektrikum
5.5 Clausius-Mosotti-Formel . . . . . . . . . . . . . .
5.6 Feldenergie . . . . . . . . . . . . . . . . . . . . .
5.7 Kraftdichte . . . . . . . . . . . . . . . . . . . . .
5.8 Maxwell’scher Spannungstensor . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
35
36
36
37
37
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
39
39
40
41
42
42
42
42
43
43
44
6 Magnetostatik
6.1 Elektrische Ströme . . . . . . . . . . . . . . . . . . . . . . .
6.1.1 Der Stromdichtevektor . . . . . . . . . . . . . . . . .
6.1.2 Kontinuitätsgleichung . . . . . . . . . . . . . . . . .
6.1.3 Zusammenhang von Strom und Ladung in der Statik
6.2 Ampere’sches Gesetz . . . . . . . . . . . . . . . . . . . . . .
6.3 Biot-Savart-Gesetz . . . . . . . . . . . . . . . . . . . . . . .
6.4 Maxwellgleichungen . . . . . . . . . . . . . . . . . . . . . . .
6.5 Das Vektorpotential . . . . . . . . . . . . . . . . . . . . . . .
6.6 Multipolentwicklung . . . . . . . . . . . . . . . . . . . . . .
6.6.1 Moment 0. Ordnung . . . . . . . . . . . . . . . . . .
6.6.2 Moment 1. Ordnung . . . . . . . . . . . . . . . . . .
6.7 Magnetisierung . . . . . . . . . . . . . . . . . . . . . . . . .
6.8 Übergangsbedingungen . . . . . . . . . . . . . . . . . . . . .
6.9 Stromfreie Probleme . . . . . . . . . . . . . . . . . . . . . .
6.10 Feldenergie . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.11 Kraft auf Stromverteilung im äußeren Magnetfeld . . . . . .
6.12 Magnetischer Spannungstensor . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
45
45
45
45
45
46
46
47
48
48
49
49
50
51
51
52
54
54
7 Induktionsgesetz - langsam veränderliche Felder
7.1 Faraday’sches Gesetz . . . . . . . . . . . . . . . .
7.2 Wechselstromtechnik . . . . . . . . . . . . . . . .
7.2.1 Kirchhoff’sche Regeln . . . . . . . . . . . .
7.2.2 Einfacher elektrischer Schwingkreis . . . .
8 Das Vollständige System
8.1 Materialgleichungen . .
8.1.1 Statik . . . . .
8.1.2 Dynamik . . . .
8.2 Maxwellgleichungen im
8.3 Übergangsbedingungen
THEORETISCHE PHYSIK C
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
55
55
57
57
57
der Maxwellgleichungen
. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
Fourierraum . . . . . . . . .
. . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
61
62
62
62
64
64
3
ABBILDUNGSVERZEICHNIS
8.4
8.5
8.6
8.7
8.8
8.9
Eichtransformationen . . . . . . . . . . . . . .
Inhomogene Wellengleichung im Vakuum . . .
Lorenz-Eichung . . . . . . . . . . . . . . . . .
Greensche Funktion der Wellengleichung . . .
Coulomb- oder transversale Eichung . . . . . .
Energiesatz und Poynting-Vektor . . . . . . .
8.9.1 Energiesatz in nicht dispersiven Medien
8.9.2 Energiesatz in dispersiven Medien . . .
8.10 Impulssatz . . . . . . . . . . . . . . . . . . . .
8.11 Drehimpulssatz . . . . . . . . . . . . . . . . .
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
65
65
66
66
67
68
68
69
69
70
9 Elektromagnetische Wellen
71
9.1 Wellen im Vakuum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
9.2 Wellen im homogenen transparenten Medium . . . . . . . . . . . . . . . . 72
9.3 Wellenerzeugung im Vakuum . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Abbildungsverzeichnis
1
Nützliche Beziehungen in krummlinigen Koordinaten aus [4] . . . . . . . .
THEORETISCHE PHYSIK C
9
4
1 EINLEITUNG
1
5
Einleitung
Diese Zusammenfassung basiert auf der von Prof. Dr. Carsten Rockstuhl im Wintersemester 2015/2016 gehaltenen Vorlesung Klassische Theoretische Physik III (Theorie C, Elek”
trodynamik)“. Sie ist nicht als offizielle Lernhilfe von Seiten der Übungsleiter entstanden,
sondern privat erstellt worden. Sämtliche Angaben, Formeln, Berechnungen, Herleitungen
und Schilderungen sind daher ohne Gewähr und es besteht kein Anspruch auf inhaltliche
Richtigkeit oder Vollständigkeit.
In diesem Dokument finden sich an vielen Stellen die Herleitungen der wichtigen Formeln
recht ausführlich. Dies allerdings ist nur der Fall, wenn die besagten Herleitungen in
ihrem Umfang dem Stil einer Zusammenfassung zuträglich sind. In einigen anderen Fällen
wird für eine genauere Herleitung auf das offizielle Skript der Vorlesung verwiesen. In
diesem finden sich häufig nicht nur mehr Zwischenschritte einer Rechnung, sondern auch
gelegentlich mehr Beispiele zur Anwendung der formalen Zusammenhänge. Im Skript wird
so zum Beispiel für eine feste Kugelgeometrie gezeigt, dass die verschiedenen Wege, die
elektrische Energie auf dieser Geometrie zu berechnen, äquivalent sind.
Neben solchen zusätzlichen Schritten der Herleitung oder derartigen Beispielen versucht
diese Zusammenfassung, möglichst alle Themen der Vorlesung aufzugreifen. Bei zwei speziellen Thematiken ist dies allerdings nicht geschehen. Einerseits findet sich keine Diskussion des Energiesatzes (Poynting’schen Satzes) für dispersive Medien, wie sie im Skript
in Kapitel 8.7.2 durchgeführt wird. Andererseits wird auf eine genaue Betrachtung der
Wellenerzeugung verzichtet, die im offiziellen Skript in Kapiteln 9.3 und 9.3.1 behandelt
wird. Auf der anderen Seite findet sich in der Vorlesung selbst kein Inhalt zur elektromagnetischen Drehimpulsbilanz. Dieser Sachverhalt wurde in den Übungen diskutiert und
das entsprechende Kapitel (8.11) basiert auf den daraus entnommenen Informationen,
welche aber mit Musterlösungen abgeglichen wurden.
Das im Skript vorhandene 10. Kapitel zum Thema der allgemeinen Relativitätstheorie
ist in dieser Zusammenfassung gänzlich nicht vertreten, da es vom Dozenten als nicht
klausurrelevant deklariert wurde.
Das an mehreren Stellen in diesem Dokument einschließlich dieser Einleitung erwähnte
Skript ([1]) meint das unter dem Namen Elektrodynamik finales Skript“auf der Ilias”
Seite der Vorlesung erhältliche vollständige Skript der Vorlesung, das von Prof. Dr. Carsten Rockstuhl erstellt wurde. Es ist zu bemerken, dass etwaige darin enthaltene Fehler
mit großer Wahrscheinlichkeit in dieses Dokument übernommen wurden, sodass erneut
erwähnt sein sollte, dass in dieser Zusammenfassung keinerlei Anspruch auf inhaltliche
Richtigkeit oder Vollständigkeit besteht.
Zuletzt seien noch einige Werke erwähnt, die in Ergänzung zum Skript eine Vorbereitung
auf eine etwaige Prüfung zu den Themen der Elektrodynamik ermöglichen:
• D.J.Griffiths, Introduction to Electrodynamics
• J.D.Jackson, Klassische Elektrodynamik
• W.Nolting, Grundkurs Theoretische Physik 3
• W.Greiner, Klassische Elektrodynamik
THEORETISCHE PHYSIK C
5
2 MATHEMATISCHE GRUNDLAGEN
2
7
Mathematische Grundlagen
Die Wesentlichen mathematischen Grundsätze, die in der Elektrodynamik vonnöten sind,
beziehen sich auf Differential- und Integralrechnung. Diese bezieht sich dabei sowohl
auf die eine Dimension der Zeit als auch auf die drei (bekannten und erfassbaren) Dimensionen des Raumes. Aufgrund dessen ist eine kurze Wiederholung der für derartige
Rechnungen hilfreichen Zusammenhänge an dieser Stelle sinnvoll, wobei natürlich nicht
beweisvollständig gearbeitet wird.
2.1
Differentialrechnung und Vektoranalysis
Die drei Möglichkeiten, im dreidimensionalen Ableitungen nach Ortskoordinaten durchzuführen, sind der Gradient, die Divergenz und Rotation.
Der Gradient wirkt auf skalare Funktionen, sei also eine Funktion f : R3 → R gegeben
und x ∈ R3 , also x = (x1 , x2 , x3 )T . Dann ist der Gradient definiert als
T
∂f ∂f ∂f
grad f = ∇f =
.
(2.1)
,
,
∂x1 ∂x2 ∂x3
Weiterhin gilt für die Richtungsableitung der skalaren Funktion f , dass sich diese wie
folgt mit Hilfe des Gradienten ausdrücken lässt:
∂f
= (grad f ) · r.
∂r
(2.2)
Im Gegensatz zum Gradienten wirkt die Divergenz auf vektorwertige Funktionen g : R3 →
R3 . Wenn man jene ausdrückt durch drei Komponentenfunktionen g1 , g2 und g3 gilt für
die Divergenz
∂g1
∂g2
∂g3
div g = ∇ · g =
+
+
.
(2.3)
∂x1 ∂x2 ∂x3
Zu guter Letzt gibt es die Rotation, welche ebenso auf vektorwertige Funktionen wirkt.
Diese ist definiert als
∂ ∂g3
∂g2
−
g
1
∂x3
∂x1
2
∂x
∂g3
∂g1
−
rot g = ∇ × g = ∂x∂ 2 × g2 = ∂x
(2.4)
∂x1 .
3
∂
∂g
∂g
2
1
g3
− ∂x2
∂x3
∂x1
Ein Kreuzprodukt wie dieses kann auch mit Hilfe des Levi-Civita-Symbols beschrieben
werden, welches bereits aus Theo A bekannt ist. Mit diesem lässt es sich schreiben als
(a × b)i =
3
X
ǫijk aj bk .
(2.5)
Für die Kombination mehrerer solcher Symbole gilt
δil δim δin ǫijk ǫlmn = det δjl δjm δjn δkl δkm δkn (2.6)
ǫijk ǫilm = δjl δkm − δjm δkl .
(2.7)
j,k=1
mit dem Kronecker-Delta δij . Ist einer der Indizes der beiden Symbole identisch, so ergibt
sich die sogenannte Jacobi-Identität
THEORETISCHE PHYSIK C
7
2 MATHEMATISCHE GRUNDLAGEN
8
Wie das Kreuzprodukt lassen sich auch derartige Ableitungen in Indexnotation schreiben.
Man definiert hierzu
∂
u = ∂j u = u,j .
∂xj
Dementsprechend lassen sich einzelne Komponenten einer Divergenz und der Gradient
schreiben als
div A = ∇ · A =
3
X
Ai,i sowie (grad u)j = (∇u)j = u,j
i=1
und dementsprechend gilt für eine beliebige skalare Funktion
(rot grad u)i = ǫijk ∂j (grad u)k = ǫijk u,k,j = −ǫikj u,k,j = 0
(2.8)
weil sich die Ableitungen symmetrisch und ǫ antisymmetrisch unter Vertauschung der
Indizes verhalten. Weiterhin gilt für jede vektorwertige Funktion
div rot A =
3
X
(rot A)i,i =
i=1
3
X
i=1
ǫijk Ak,j,i = −
3
X
ǫikj Ak,j,i = 0
(2.9)
i=1
weil auch hier die Ableitungen symmetrisch unter Vertauschung der Indizes sind.
Eine doppelte Ableitung, die ungleich Null ist, lässt sich insbesondere für skalare Funktionen leicht definieren:
div grad u = ∇ · (∇u) =
3
X
u,j,j = ∆u
j=1
nennt sich der Laplace-Operator. Auf vektorwertige Funktionen wird dieser Operator
komponentenweise angewandt, sodass
∆A1
A1
∆A = ∆ A2 = ∆A2
∆A3
A3
gilt, beziehungsweise in Indizes geschrieben (∆A)i = ∆(Ai ). Auf diese Weise lässt sich
(mit Einstein’scher Summenkonvention) abschließend formulieren, dass
(rot rot A)i = ǫijk (rot A)k,j = ǫijk (ǫklm Am,l ),j
= (δil δjm − δim δjl )Am,l,j = Aj,i,j − Ai,j,j
= Aj,j,i − Ai,j,j = (grad div A)i − (∆A)i .
(2.10)
(2.11)
(2.12)
Die bislang diskutierten Ableitungen bezogen sich auf karthesische Koordinaten, bei denen
der sehr einfache Zusammenhang besteht, dass eine Variable xj nur in der j-ten Komponente des (Orts-)Vektors auftaucht. Da es jedoch bei manchen Problemen einfacher und
daher sinnvoller ist, nicht mit kartesischen, sondern krummlinigen Koordinaten zu rechnen, ist es wichtig, auch die dafür korrekten Differentialoperatoren zu verwenden. Über
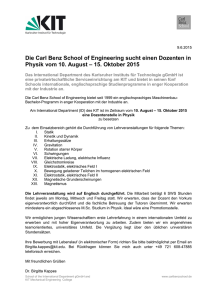
diese gibt die folgende Abbildung 1 einen Überblick. Eine genaue Herleitung der hier gegebenen Zusammenhänge findet sich in [2], wobei die dort nicht aufgeführten Operationen
analog zu beweisen sind.
THEORETISCHE PHYSIK C
8
2 MATHEMATISCHE GRUNDLAGEN
9
Abbildung 1: Nützliche Beziehungen in krummlinigen Koordinaten aus [4]
Mit Hilfe der Index-Notation lassen sich auch Eigenschaften für das Spatprodukt sowie
doppelte Kreuzprodukte formulieren. Somit folgt
A × B = −B × A
A × (B × C) = B · (A · C) − C · (A · B)
A · (B × C) = B · (C × A) = C · (A × B) .
(2.13)
(2.14)
(2.15)
Für die Ableitungen von derartigen Produkten aus vektorwertigen Funktionen (⊗ bezeichne hier entweder × oder ·) gilt eine Produktregel, wenn also der Index c bedeutet,
dass die damit versehene Funktion jeweils konstant und von der Ableitung unbetroffen
bleibt, dann lässt sich dies schreiben als
∇ ⊗ (A ⊗ B) = ∇ ⊗ (A ⊗ Bc ) + ∇ ⊗ (Ac ⊗ B) .
(2.16)
Basierend darauf lassen sich auch weitere wichtige Zusammenhänge herleiten. So folgt aus
Gleichung 2.14
A × (∇ × B) = ∇ · (Ac · B) − B · (Ac · ∇) = ∇ · (Ac · B) − (Ac · ∇) · B.
Es gilt also wenn man die selben Rechenschritte unter Vertauschung von A und B nochmals durchführt und die Ergebnisse addiert
A × (∇ × B) + B × (∇ × A) = ∇ · (Ac · B) − (Ac · ∇) · B + ∇ · (Bc · A) − (Bc · ∇) · A.
Verwendet man nun außerdem Gleichung 2.16, so ergibt sich zunächst
∇ · (A · B) = ∇ · (A · Bc ) + ∇ · (Ac · B)
THEORETISCHE PHYSIK C
9
2 MATHEMATISCHE GRUNDLAGEN
10
und als endgültige Form der Zusammenhang
∇ · (A · B) = A × (∇ × B) + B × (∇ × A) + (Ac · ∇) · B + (Bc · ∇) · A
beziehungsweise ausgedrückt mit den Begriffen der Rotation und des Gradienten
grad (A · B) = A × rot B + B × rot A + (A · grad)B + (B · grad)A.
(2.17)
Weiterhin kann man auch Aussagen machen über Terme der Form
∇ · (A × B) = ∇ · (Ac × B) + ∇ · (A × Bc )
= Ac · (B × ∇) + Bc · (∇ × A)
= Bc · (∇ × A) − Ac · (∇ × B),
sodass sich in Rotationen und Divergenzen geschrieben schließlich
div (A × B) = B · rot A − A · rot B
(2.18)
ergibt. Mit einer weiteren Skalaren Funktion λ folgt daraus mit Hilfe der Produktregel
div (λA × B) = λ(B · rot A − A · rot B) + (A × B) · grad λ.
2.2
(2.19)
Integralsätze
Zusätzlich zu verschiedenen Varianten der Differentiation sind auch bestimmte Zusammenhänge der Integration äußerst Hilfreich beim mathematischen Umgang mit Elektrodynamik. Zunächst gibt es das Linienintegral des Gradienten, also
Z r2
Z r2
du = u(r2 ) − u(r1 ).
(2.20)
(grad u) · dr =
r1
r1
Weiterhin sind die Integralsätze von Gauß und von Stokes zu betrachten. Ersterer Stellt
einen Zusammenhang zwischen Oberflächen- und Volumenintegralen her und lautet
Z
Z
div A dV
(2.21)
A · df =
(V )
V
wobei V das Integrationsvolumen und (V ) = ∂V dessen Rand ist. Letzterer Wiederum
verknüpft Flächen- und Wegintegrale über
Z
Z
rot A · df
(2.22)
A · dr =
(F )
F
wobei F eine einfach zusammenhängende Fläche und (F ) = ∂F ihr Rand ist.
Zuletzt gibt es auch zwei Greensche Sätze, welche sich recht einfach aus den bisherigen
Formeln herleiten lassen. Der erste derer lautet
Z
Z
Z
(2.23)
div (k · ∇l) dV = (∇k · ∇l + k · ∆l)dV
k · ∇l · df =
(V )
V
V
wobei k und l skalare Funktionen sind. Dieser folgt offenbar direkt aus dem Satz von Gauß
(siehe Gleichung 2.21). Aus diesem wiederum ergibt sich durch Bildung einer Differenz
zwischen zwei vertauschten Argumenten auch der zweite Greensche Satz:
Z
Z
(k · ∇l − ∇k · l) · df = (k · ∆l − ∆k · l)dV.
(2.24)
(V )
THEORETISCHE PHYSIK C
V
10
2 MATHEMATISCHE GRUNDLAGEN
2.3
11
Delta-Distribution
Die Delta Distribution ist der Grenzwert der Gauß-Funktion für σ → 0, bildet sich also
als
x2
1
lim gσ (x) = lim √ e− 2σ2 = δ(x).
σ→0
σ→0 σ 2π
Dadurch hat sie die Eigenschaft, dass sie eine unendlich dünne, aber durch die Normierung
unendlich hohe Gauß-Glocke ist. Aufgrund dieser Normierung ist weiterhin
Z ∞
Z ∞
gσ (x)dx = 1.
δ(x)dx = lim
−∞
σ→0
−∞
Durch die spezielle Eigenschaft, dass der Funktionswert dieser Distribution an quasi allen
Stellen außer der Nullstelle des Arguments gegen 0 geht, hat sie weiterhin sehr nützliche
Faltungseigenschaften:
Z ∞
f (x′ )δ(x − x′ )dx′ = f (x′ )|x=x′ = f (x).
(2.25)
−∞
Dies gilt auch für ein mehrdimensionales x ∈ Rn , die entsprechende Integralgleichung
lautet
Z
f (x′ )δ(x − x′ ) dn x′ = f (x).
(2.26)
Rn
Bei mehrdimensionalen Funktionen ist jedoch stets darauf zu achten, dass die Normierung
erhalten bleibt. Für ein dreidimensionales Problem gilt also
δ(r) =
δ(r)
4πr2
weil nur durch diesen zusätzlichen Faktor (Oberfläche einer Kugel mit Radius r) das
Integral
Z ∞
Z 2π
Z
Z ∞ Z π
δ(r)
2
3
dr δ(r) = 1
=
dϕ r sin(ϑ)
dϑ
dr
δ(r) d r =
4πr2
0
0
0
R3
0
ergibt. Bei zweidimensionalen Geometrien ist der Korrekturfaktor entsprechend der Umfang eines Kreises, also 2πr.
Die Einsatzmöglichkeiten der Delta-Distribution gehen allerdings noch weiter. Sie lässt
sich ableiten, was mit partieller Integration zum folgenden Ergebnis führt:
Z ∞
Z ∞
∂
′ ∂
′
′
′
′ ∞
f (x ) ′ δ(x − x )dx = f (x )δ(x − x )|−∞ −
f (x′ )δ(x − x′ )dx′ (2.27)
′
∂x
∂x
{z
}
|
−∞
−∞
=0
∂
= − f (x).
∂x
(2.28)
Weiterhin kann man als Argumente auch Funktionen in die Distribution einsetzen, sodass
diese dann als Auswertung an den Nullstellen xi (oder Summe derer, falls sie dabei nicht
in einer Faltung auftaucht) dieser Funktion fungiert. Ein Beispiel hierzu findet sich auf
Seite 20 des Skripts und in Aufgabe 2 des zweiten Übungsblattes, wird hier allerdings
nicht ausgeführt, da es in der Elektrodynamik keinerlei Anwendung findet.
THEORETISCHE PHYSIK C
11
2 MATHEMATISCHE GRUNDLAGEN
2.4
12
Greensche Funktion
In der Physik tauchen des öfteren inhomogene Differentialgleichungen auf. Insbesondere
im Bezug auf Elektrodynamik hat man es sehr oft mit der sogenannten Poisson-Gleichung
zu tun. Diese lautet
∆f = g
(2.29)
mit zwei skalaren oder vektorwertigen Funktionen f und g. Zur Lösung dieser Gleichung
(bzw. der Bestimmung einer partikulären Lösung) ist die Definition einer Funktion G0
hilfreich, welche die Eigenschaft
∆G0 (r − r′ ) = δ(r − r′ )
(2.30)
besitzt. Mit einer solchen Funktion lässt sich f berechnen als ein Faltungsintegral von g:
Z
f (r) =
G0 (r − r′ )g(r′ ) d3 r.
R3
Setzt man dies in Gleichung 2.29 ein, so ergibt sich
Z
Z
′
′
3
δ(r − r′ )g(r′ ) d3 r = g(r),
∆G0 (r − r )g(r ) d r =
∆f (r) =
R3
R3
weshalb diese Lösung f offensichtlich die gegebene Differentialgleichung erfüllt. Nun ist
es wichtig, eine (dreidimensionale) Funktion zu finden, welche genau diese Eigenschaft
erfüllt. Man stößt hierbei auf
∆
1
= −4πδ(r − r′ ).
′
|r − r |
(2.31)
Dieser Sachverhalt lässt sich leicht herleiten, wobei hierzu der Einfachheit wegen keine
Differenz aus zwei Raumpunkten, sondern nur ein solcher betrachtet wird. Die Argumentation für den gegebenen Fall funktioniert analog. Wir betrachten die Funktion
f (r) =
1
1
= .
|r|
r
Diese hat offenbar nur eine Abhängigkeit vom Betrag des Vektors r, also hat auch nur die
Ableitung nach dieser Koordinate einen Beitrag. Wendet man zunächst den Gradienten
in Kugelkoordinaten (siehe Abbildung 1) darauf an, so ergibt sich
grad f (r) =
∂
r
1
f (r) · er = − 2 · er = − 3 =: g(r).
∂r
r
r
Als nächstes wendet man die Divergenz (erneut nur den r-Bestandteil) auf dieses Ergebnis
an und erhält
div g(r) =
1 ∂ (r2 · gr (r))
1 ∂ (−1)
= 2
= 0.
2
r
∂r
r ∂r
Entsprechend dieser Rechnung verschwindet also überall die Divergenz von g und entsprechend der Laplace von f . Dies ist allerdings nicht vollkommen korrekt, da der Ursprung,
in dem diese divergente Funktion nicht definiert ist, vernachlässigt wurde. Man benötigt
THEORETISCHE PHYSIK C
12
2 MATHEMATISCHE GRUNDLAGEN
13
für diesen also eine spezielle Herangehensweise mit Hilfe des Satzes von Gauß (siehe 2.21).
Wir definieren ein beliebiges Kugelvolumen V mit dem Radius R, dann folgt
Z π
Z 2π
Z
Z
dϑ r2 sin(ϑ) g(r) = −4π.
dϕ
g(r) · df =
div g(r) dV =
0
0
(V )
V
Da das Ergebnis dieses Integrals offenbar für jeden beliebigen Radius R > 0 des gewählten
Integrationsvolumens identisch ist folgt, dass dieser Beitrag direkt im Nullpunkt entsteht.
Es gilt
Z
Z
δ(r) dV ⇒ ∆f (r) = div g(r) = −4πδ(r).
div g(r) dV =
V
V
Aufgrund dieser Eigenschaft ist die erwähnte Greensche Funktion gegeben durch
G0 (r − r′ ) = −
1
1
.
4π |r − r′ |
(2.32)
Zu dieser kann man beliebige Erweiterungen derart hinzufügen, sodass eine neue Funktion (welche nur auf einem begrenzten Raumbereich Ω die geforderte Eigenschaften aus
Gleichung 2.30 erfüllt) entsteht:
G(r − r′ ) = G0 (r − r′ ) + F (r − r′ ) mit ∆F (r − r′ ) = 0 ∀ r ∈ Ω.
2.5
(2.33)
Kugelflächenfunktionen
Ebenso wie die eben aufgeführten Greenschen Funktionen haben auch die sogenannten
Kugelflächenfunktionen ihren Ursprung in einer Poisson-Gleichung (siehe 2.29). In diesem
speziellen Fall wird allerdings eine homogene Gleichung betrachtet, in der also g ≡ 0 gilt.
Eine solche Gleichung wird als Laplace-Gleichung bezeichnet. Für das Auffinden einer
Funktion, die die gewünschte Eigenschaft erfüllt, verwendet man hierbei einen Separationsansatz:
f (r, ϑ, ϕ) = R(r) · Y (ϑ, ϕ).
Weiterhin zerlegt man entsprechend den Laplace-Operator in zwei Teile, von denen einer
auf den Radial- und ein anderer auf den Winkelanteil wirkt. Hierzu verwendet man die
in Abbildung 1 gegebene Darstellung:
1
∆f = 2
r
∂ ∂f 1 ∂ 2f
∂ 2f
1 ∂f
r2
·
+
+
+ 2
2
2
∂r
∂ϑ
tan ϑ ∂ϑ
∂r
sin ϑ ∂ϕ
{z
}
{z
} |
|
∆ϑ,ϕ
∆r
Der Faktor r12 wurde hierbei ausgeklammert, da er in der Laplace-Gleichung keinen Beitrag
hat. Wenn man die gesamte Gleichung (rechte Seite 0) mit r2 multipliziert, ist sie ebenso
erfüllt. Im folgenden wird der Operator also immer ohne diesen Zusatzterm betrachtet.
Bei der Anwendung des Operators auf die Funktion f muss eine Produktregel angewendet
werden:
∆f = ∆R · Y + R · ∆Y = ∆r R · Y + R · ∆ϑ,ϕ Y = 0.
Weiterhin machen wir für f einen Potenzreihenansatz und fordern, dass diese Reihe stets
einen Wert größer Null und kleiner ∞ als Grenzwert hat. Damit gilt
f=
∞
X
l,m=0
THEORETISCHE PHYSIK C
Rl Ylm =
∞
X
al rl Ylm
l,m=0
13
2 MATHEMATISCHE GRUNDLAGEN
14
mit Rl = al rl . Differenziert man den Radialteil mit dem Laplace-Operator, so ergibt sich
∂Rl
= l al rl−1
∂r
∂Rl
= l al rl+1
r2 ·
∂r
∂R
∂
l
r2 ·
= l (l + 1) al rl = l (l + 1) Rl .
∂r
∂r
Das heißt für die l-te Teilfunktion Rl gilt, dass
∆r Rl = l (l + 1) Rl .
Dementsprechend gilt für die lm-te Teilfunktion von f der Zusammenhang
∆flm = ∆r Rl · Ylm + Rl · ∆ϑ,ϕ Ylm = 0.
Daraus lässt sich nun sehr einfach eine Eigenwertgleichung für die Funktionen Ylm herleiten:
⇒ l · (l + 1) · Rl · Ylm = −Rl · ∆ϑ,ϕ Ylm
⇒ −l · (l + 1) · Ylm = ∆ϑ,ϕ Ylm .
Diese lässt sich mit einem weiteren Separationsansatz der Art
Ylm (ϑ, ϕ) = Θlm (ϑ) · Φm (ϕ)
lösen. Dieser Rechenschritt wird hier nicht in aller Gänze ausgeführt, ist jedoch in [3]
nachzulesen. Als Lösungen ergeben sich
Θlm (ϑ) = Plm (cos(ϑ)) und Φm (ϕ) = eimϕ ,
wobei Plm sogenannte Legendre-Funktionen sind. Man hätte somit bereits die gesuchten
Eigenfunktionen des Winkelanteils des Laplace-Operators gefunden, will allerdings für
diese weiterhin Normierung fordern. Dementsprechend soll
Z π
|Θlm (ϑ)|2 sin(ϑ) dϑ = 1
0
Z 2π
|Φm (ϕ)|2 dϕ = 1.
0
gelten. Um dies zu erfüllen müssen den Funktionen Normierungsfaktoren hinzugefügt
werden:
s
2l + 1 (l − |m|)!
Θlm (ϑ) =
Plm (cos(ϑ))
2 (l + |m|)!
1
Φm (ϕ) = √ eimϕ .
2π
Die endgültigen Kugelflächenfunktionen, welche nun die Eigenschaft besitzen orthonormiert zu sein, haben also die Gestalt
s
2l + 1 (l − |m|)!
Plm (cos(ϑ)) eimϕ .
(2.34)
Ylm (ϑ, ϕ) = Θlm (ϑ) · Φm (ϕ) =
4π (l + |m|)!
THEORETISCHE PHYSIK C
14
2 MATHEMATISCHE GRUNDLAGEN
15
Wie sich an den Fakultäten im Normierungsfaktor bereits zeigt nehmen die Indizes m
nur Werte zwischen −l und l an. In dieser Darstellung wurden bislang die auftretenden
Legendre-Funktionen nicht näher definiert. Jene lassen sich darstellen als Ableitungen der
Legendre-Polynome:
(
m P (cos(ϑ))
l
(−1)m sinm (ϑ) dd(cos(ϑ))
m>0
m
Plm (cos(ϑ)) =
.
(−1)m Pl|m| (cos(ϑ))
m<0
Diese wiederum können auf zwei Arten definiert werden, existieren im Intervall [-1,1] und
haben die Eigenschaft, dass sie orthogonal sind, also dass
Z 1
2
δln .
dx Pl (x) Pn (x) =
2n + 1
−1
Für die ersten beiden Polynome gilt P0 (cos(ϑ)) = 1 und P1 (cos(ϑ)) = cos(ϑ). Alle weiteren
lassen sich rekursiv berechnen als
(l + 1)Pl+1 (x) = (2l + 1)xPl (x) − lPl−1 (x).
Alternativ erhält man sie auch über
Pl (x) =
1 dl 2
(x − 1)l .
2l l! dxl
Die hierbei verwendete Variable x wird im Falle der Kugelflächenfunktionen durch cos(ϑ)
ersetzt. Die ersten Kugelflächenfunktionen (bis l = 2) lauten basierend auf diesen Berech∗
nungswegen (es gilt Ylm
= (−1)m Yl (−m) ):
r
r
r
r
1
3
1
1
; Y10 =
cos(ϑ) ; Y11 =
sin(ϑ) eiϕ ; Y1 (−1) =
sin(ϑ) e−iϕ
Y00 =
4π
4π
8π
8π
r
r
15
15
iϕ
Y21 = −
sin(ϑ) cos(ϑ)e ; Y2 (−1) =
sin(ϑ) cos(ϑ)e−iϕ
8π
8π
r r
r
1
1 15
1
5 3
15
cos(ϑ) −
; Y22 =
sin2 (ϑ) e2iϕ ; Y2 (−2) =
sin2 (ϑ) e−2iϕ .
Y20 =
4π 2
2
4 2π
4 2π
2.6
Fouriertransformation
Die Fouriertransformation ist die Erweiterung der Fourier-Reihenentwicklung auf nichtperiodische Funktionen. Zur Erinnerung soll zunächst diese Reihenentwicklung am Beispiel
2π-periodischer Funktionen aufgeführt werden. Solche Funktionen f lassen sich nähern
über die Reihe
Z π
∞
X
1
inx
f (x) =
cn e
mit cn =
f (x) e−inx dx.
2π −π
n=−∞
Ist f (x) ∈ R so lässt sich sagen, dass c−n = c∗n ist. Darüber lassen sich neue reelle
Koeffizienten definieren:
Z
1 π
an = 2 ℜ(cn ) = cn + c−n =
f (x) cos(nx) dx
π −π
Z
1 π
cn − c−n
= i(cn − c−n ) =
bn = −2 ℑ(cn ) = −
f (x) sin(nx) dx.
i
π −π
THEORETISCHE PHYSIK C
15
2 MATHEMATISCHE GRUNDLAGEN
Aus dieser Definition ergibt sich weiterhin cn =
rierreihe der Funktion f lässt sich schreiben als
f (x) = c0 +
∞
X
16
an −ibn
2
sowie c−n =
an +ibn
2
und die Fou-
cn einx + c−n e−inx
n=1
∞
a0 1 X
+
(an − ibn ) einx + (an + ibn ) e−inx
=
2
2 n=1
∞
a0 1 X
+
an (einx + e−inx ) − ibn (einx − e−inx )
=
2
2 n=1
∞
=
a0 X
+
an cos(nx) + bn sin(nx).
2
n=1
Bei der Transformation wird nun keine spezifische Periodizität gefordert, also wird auch
das Integral nicht in den Grenzen −π bis π durchgeführt, sondern über ganz R. Man
definiert
Z ∞
1
˜
f (k) =
f (x) e−ikx dx.
(2.35)
2π −∞
Es lässt sich zeigen, dass man auch eine inverse Transformation definieren kann, sodass
aus der Fouriertransformierten wieder die normale Funktion wird:
Z ∞
f (x) =
f˜(k) eikx dk.
(2.36)
−∞
In der Physik befasst man sich mit Funktionen, die von 4 Größen abhängen, den drei
Koordinaten des Raumes r und der Zeit t. Dementsprechend sind auch dies die Größen,
die unter Fouriertransformationen in ihre konjugierten Frequenzen k und ω übertragen
werden. Man verwendet hierbei für die Transformation der Zeit genau die umgekehrten
Vorzeichen im Exponenten der e-Funktion wie in obiger Definition, damit ergibt sich also
für eine physikalisch relevante Funktion der Zusammenhang
Z ∞Z
1
˜
f (r, t) e−i(kr−ωt) d3 r dt
(2.37)
f (k, ω) =
(2π)4 −∞ R3
Z ∞Z
f (r, t) =
f˜(k, ω) ei(kr−ωt) d3 k dω.
(2.38)
−∞
R3
Die Transformation hat weiterhin die praktische Eigenschaft, dass sie Ableitungen in
Multiplikationen umformt. Die Fouriertransformierte einer Zeitableitung ist
Z ∞Z
∂
1
˜
f (r, t) e−i(kr−ωt) d3 r dt
ft (k, ω) =
4
(2π) −∞ R3 ∂t
Z ∞Z
1
∂
∂
=
f (r, t) e−i(kr−ωt) − f (r, t) e−i(kr−ωt) d3 r dt
4
(2π) −∞ R3 ∂t
∂t
Z
Z
Z ∞
3
1
−i(kr−ωt) ∞
f (r, t) iω e−i(kr−ωt) d3 r dt
d
r
−
·
f
(r,
t)
e
=
−∞
4
(2π)
−∞ R3
R3 |
{z
}
=0
= −iω f˜(k, ω).
THEORETISCHE PHYSIK C
16
2 MATHEMATISCHE GRUNDLAGEN
17
Analog lässt sich zeigen, dass die Ableitung nach einer Ortskoordinate
dem Faktor iki entspricht. Zusammenfassend gilt also
∂
∂xi
∂ FT
FT
−→ −iω und ∇ −→ ik.
∂t
im Fourierraum
(2.39)
Mit diesen Mitteln lassen sich Differentialgleichungen in gewöhnliche Funktionsgleichungen Umschreiben. Als einfaches Beispiel hierfür kann die Differentialgleichung eines getriebenen ungedämpften harmonischen Oszillators dienen. Diese lautet
m r̈(t) + m ω02 r(t) = F(t).
Durch Fouriertransformation erhält man die Form
(−iω)2 m r̃(ω) + m ω02 r̃(ω) = F̃(ω) ⇒ r̃(ω) =
1 F̃(ω)
.
m ω02 − ω 2
Die Lösung der Differentialgleichung ist also mittels Rücktransformation gegeben durch
1
r(t) =
m
Z
∞
−∞
F̃(ω) −iωt
e
dω.
ω02 − ω 2
Auch im Bezug auf Faltungen (wie im Umgang mit der Greenschen Funktion üblich,
siehe in den Kapiteln 2.3 und 2.4) hat die Fouriertransformation nützliche Eigenschaften.
Existiert eine gefaltete Funktion
Z ∞
f (τ ) g(x − τ ) dτ,
h(x) = (f ∗ g)(x) =
−∞
dann gilt für deren Transformierte, dass sie sich als Produkt der Transformierten der
Einzelfunktionen darstellen lässt:
h̃(k) = 2π · f˜(k) · g̃(k).
Auf diese Weise lassen sich Faltungsintegrale, die zumeist schwerer errechenbar sind, falls
die Funktion g anders als in den meisten in der Elektrodynamik auftauchenden Fällen
nicht der Delta-Distribution entspricht, im Fourierraum komplett umgehen.
Bei allen in diesem Kapitel gegebenen Informationen ist es wichtig zu beachten, dass
es unterschiedliche Möglichkeiten gibt, die Fouriertransformation zu definieren. Zunächst
ist es eine willkürliche und nur in der Physik konventionelle Festlegung, dass die Vorzeichen im Exponenten der e-Funktion bei Transformation der Zeit umgekehrt gewählt
werden als im allgemeinen Fall. In der Elektrotechnik werden hingegen konventionell die
normalen Vorzeichen verwendet, um Zeit t und Frequenz ω ineinander umzuwandeln. Wei1
willkürlich gewählt, man kann diesen ebenso vor
terhin ist die Wahl des Vorfaktors 2π
√
die Rücktransformation stellen oder gar vor beide Schritten jeweils durch 2π dividieren. Die gegebenen Angaben sind also im Zweifelsfall zu überprüfen und auf die gegebene
Situation anzupassen und stellen nur die in dieser Vorlesung gewählten Parameter dar.
THEORETISCHE PHYSIK C
17
3 ELEKTROSTATIK IM VAKUUM
3
3.1
19
Elektrostatik im Vakuum
Coulombesches Gesetz
Experimentell konnte man einen Zusammenhang zwischen der Kraft und der Entfernung
zweier Punktladungen ermitteln. Sei q1 am Ort r1 und q2 am Ort r2 , dann gilt für die
Kraft, die die zweite Ladung auf die erste ausübt
F12 =
1
r1 − r2
q 1 q2
.
2
4πǫ0 |r1 − r2 | |r1 − r2 |
(3.1)
Nach Newtons drittem Axiom ist die Kraft der Ladung 1 auf Ladung 2 entsprechend
F21 = −F12 . Man sieht deutlich, dass diese Kraft abstoßend ist für q1 · q2 > 0 und
anziehend für q1 · q2 < 0. Für den Fall, dass sich in einem System mehrere Punktladungen
befinden, ergibt sich die auf eine davon wirkende Kraft durch Superposition aller auf die
einwirkenden Teilkräfte, also als
X
X
ri − rj
1
qj
qi
.
(3.2)
Fi =
Fij =
4πǫ0 i6=j |ri − rj |3
i6=j
3.2
Elektrisches Feld
Im Folgenden wollen wir aus der bekannten Kraft ein Feld ableiten. Hierzu bezeichnen
wir die Ladung q1 als Probeladung q und betrachten nur noch q2 = Q am Ort R. Auf
diese Art lässt sich das Feld schreiben als
E(r) =
r−R
1
Q
F(r)
=
.
2
q
4πǫ0 |r − R| |r − R|
(3.3)
Dies bezeichnen wir als das Feld dieser Ladung Q. Wie bereits bei der Kraft auch ergibt
sich das Feld mehrerer Ladungen durch Superposition, also als
E(r) =
X
i
Ei (r) =
Qi
r − Ri
1 X
2
4πǫ0 i |r − Ri | |r − Ri |
beziehungsweise im Falle einer Kontinuierlichen Ladungsverteilung ρ(r′ ) als
Z
1
r − r′
.
E(r) =
dV ′ ρ(r′ )
4πǫ0 V
|r − r′ |3
(3.4)
(3.5)
Setzt
als Ladungsverteilungen hierbei Punktladungen Qi am Ort Ri ein, also ρ(r′ ) =
P man
′
i δ(r − Ri ), so ergibt sich daraus wieder Gleichung 3.4.
3.3
Gauß-Gesetz (Durchflutungsgesetz, 1. Maxwellgleichung)
Das Durchflutungsgesetz, das die erste Maxwell-Gleichung darstellt, lässt sich recht einfach über ein Oberflächenintegral dieses Feldes herleiten. Hierzu benötigt man den aus
Kapitel 2.4 und dem Satz von Gauß folgenden Zusammenhang
Z
Z
Z
r − r′
1
1
r − r′
1
1
=
dV div
dV div −gradr
· df =
4π (V ) |r − r′ |3
4π V
|r − r′ |3
4π V
|r − r′ |
Z
Z
1
1
dV δ(r − r′ ) = 1.
= −
dV ∆r
=
4π V
|r − r′ |
V
THEORETISCHE PHYSIK C
19
3 ELEKTROSTATIK IM VAKUUM
20
Mit Hilfe dieser Formel lässt sich ein Oberflächenintegral über E einfach ausdrücken als
Z
Z
Z
r − r′
1
′
′
E(r) · df =
dV ρ(r )
· df
′ 3
4πǫ0 V
(V )
(V ) |r − r |
Z
Q
1
dV ′ ρ(r′ ) = .
=
ǫ0 V
ǫ0
Dies nennt man das Durchflutungsgesetz, welches sich auf zwei Arten ausdrücken lässt:
Z
ǫ0 E(r) · df = Q
(3.6)
(V )
ǫ0 div E(r) = ρ(r).
3.4
(3.7)
Elektrisches Potential
Es lässt sich für das elektrische Feld ein Potential formulieren, sodass E ein Gradientenfeld
dessen ist. Es ist also
E(r) = −grad φ(r).
(3.8)
Das Potential, dass diese Eigenschaft erfüllt, berechnet sich als
Z
1
ρ(r)
φ(r) =
.
dV ′
4πǫ0 V
|r − r′ |
(3.9)
Diese Formel bezeichnet man auch als Poisson’sches Integral.
3.5
Energie
Die Energie in einem elektrischen Feld kann als Wegintegral über die Kraft bestimmt
werden. Dieses Wegintegral entspricht der aufgewendeten Arbeit, die anschließend als
potentielle Energie im bewegten Objekt gespeichert ist.
Z r2
Z r2
Z r2
grad φ(r) · dr
(3.10)
E(r) · dr = q
F(r) · dr = −q
W = −
r1
r1
= q · [φ(r2 ) − φ(r1 )] = q · U
r1
(3.11)
mit der Spannung U = φ(r2 ) − φ(r1 ). Mit der natürlichen Randbedingung φ(∞) = 0 lässt
sich auch ein Potential von nur einem Raumpunkt ausdrücken als
Z r
E(r′ ) · dr′ ,
(3.12)
φ(r) = −
∞
womit die potentielle Energie eines geladenen Teilchens an diesem Ort geschrieben werden
kann als
Wpot = q · φ(r).
(3.13)
3.6
2. Maxwellgleichung
Da das elektrische Feld ein Gradientenfeld eines skalaren Potentials ist, verschwindet
entsprechend Gleichung 2.8 seine Rotation. Es ist folglich
rot E(r) = 0.
THEORETISCHE PHYSIK C
(3.14)
20
3 ELEKTROSTATIK IM VAKUUM
3.7
21
Felder ausgewählter Geometrien
Mit Hilfe des in Kapitel 3.3 hergeleiteten Durchflutungsgesetztes und dem Wissen, dass
das elektrische Feld einer Punktladung kugelsymmetrisch ist und nur in radialer Richtung
verläuft, lassen sich recht einfach die Felder diskreter Ladungsanordnungen auf einfachen
Geometrien berechnen.
3.7.1
Geladene Kugelschale
Zunächst soll ein Kugel konstant und homogen geladen sein, aus deren Mitte konzentrisch
ein Stück entfernt wurde. Die Ladungsverteilung hat also die Form
0 r < R1
ρ(r) = ρ0 R1 ≤ r ≤ R2 .
0 r > R2
In Kugelkoordinaten ist das zugehörige elektrische Feld für diesen Fall gegeben durch
0
r < R1
1 Q(r)
E(r) = er ·
(3.15)
R1 ≤ r ≤ R2
r2
4πǫ0
Qges
r > R2
r2
mit der Ladung Q(r) im Innern des Radius r, also
4
Q(r) = πρ0 (r3 − R13 ).
3
Im Innern einer Massiven geladenen Kugel (R1 = 0 und R2 = R) lässt sich das Feld also
beschreiben als
E(r) = er ·
3.7.2
ρ0 r3
ρ0
Qges r
=
e
·
·
r
=
e
·
.
r
r
3ǫ0 r2
3ǫ0
4πǫ0 R3
(3.16)
Unendlich langer dünner Draht
In diesem Falle ist die Ladung auf einem Draht verteilt, der o.B.d.A. auf der z-Achse liege.
Damit lässt sich in Zylinderkoordinaten sagen, dass
δ(r)
(3.17)
πr
mit einer entlang des Drahtes verteilten konstanten Längenladungsdichte ζ. Auf diese
Weise gilt
Z
Z
Z
Z
Z
ρ(r) = ζ
V
−∞
0
R∞
dr
0
dz.
dr rρ(r) = ζ
dϕ
dz
∞
∞
2π
∞
dV ρ(r) =
0
−∞
R0
Dies liegt daran, dass −∞ dr δ(r) =
δ(r) = 12 . Weil außerdem
Z
Z 2π
Z ∞
Z
dϕ r E(r) = 2πrǫ0 E(r)
E(r) · df = ǫ0
ǫ0
dz
(V )
−∞
0
∞
dz
−∞
ist (da der Draht unendlich lang ist besteht die Oberfläche nur aus der Seitenfläche) ergibt
sich als Darstellung für das E-Feld schließlich
E(r) = er ·
THEORETISCHE PHYSIK C
ζ
.
2πrǫ0
(3.18)
21
3 ELEKTROSTATIK IM VAKUUM
3.7.3
22
Unendlich ausgedehnte Fläche
Auf einer gleichmäßig mit Ladungsdichte η geladenen Fläche wie dieser steht das elektrische Feld stets senkrecht. Man kann seinen Betrag mit dem Durchflutungsgesetz ausrechnen, indem man das Flächenintegral über das Feld knapp oberhalb (Feld E1 ) und knapp
unterhalb (Feld E2 ) der Fläche berechnet und dies mit der Ladung gleichsetzt. Es ist dann
Z
Z
df.
ǫ0 (E1 + E2 ) df = η
F
F
Da die Beträge der beiden Felder oben und unten gleich groß sind ergibt sich also
E=
η
.
2ǫ0
(3.19)
Die Richtung dieses Feldes ist dabei stets orthogonal von der geladenen Fläche weg gerichtet (bzw. bei negativer Ladung darauf zu) und sein Betrag ist im gesamten Raum
konstant.
3.7.4
Plattenkondensator
Dies ist ein Spezialfall der eben diskutierten ausgedehnten Flächen, wobei nun eine derer
negativ und die andere positiv geladen ist. Außerhalb des Zwischenraumes zeigen die
Felder der beiden Platten in entgegengesetzte Richtungen und heben sich auf. Innerhalb
dessen zeigen sie in die selbe und verstärken sich somit. Sei erneut η die Oberflächenladung
auf jeder der Platten, dann ist das elektrische Feld zwischen diesen
E=
η
.
ǫ0
(3.20)
Das Feld ist dabei stets von der positiv geladenen zur negativ geladenen Platte gerichtet.
3.8
Übergangsbedingungen
Das elektrische Feld bleibt an Grenzflächen nicht grundsätzlich erhalten, sondern verändert
sich je nach deren Beschaffenheit.
Wir wählen zur Überprüfung der Normalkomponente einen Zylinder, dessen Dicke wir
gegen Null gehen lassen. Der Zylinder besteht also nur aus zwei unmittelbar benachbarten Flächen F , welche wiederum unmittelbar die betrachtete Grenzfläche zweier Medien
einschließen. das Integrationsgebiet sei so klein gewählt, dass die Ortsabhängigkeit des
Feldes keine Rolle mehr spielt und es sei auf dieser Fläche eine Oberflächenladung η vorhanden. Aus dem Satz von Gauß folgt mittels Integration über die Flächen des Zylinders
und der eingeschlossenen Grenzfläche, dass
Z
Z
Z
Z
E2n df −
E1n df =
η df.
En · df = ǫ0 ·
ǫ0
(V )
F
F
F
Daraus lässt sich also ableiten, dass sich sie Normalkomponente des elektrischen Feldes
an Oberflächen entsprechend der Oberflächenladung verändert:
E2n − E1n =
THEORETISCHE PHYSIK C
η
.
ǫ0
(3.21)
22
3 ELEKTROSTATIK IM VAKUUM
23
Die Stetigkeit der Tangentialkomponente zeigt man mit Hilfe der zweiten Maxwellschen
Gleichung. Man wählt sich hierzu einen Integrationsweg, der unmittelbar unter und oberhalb der Grenzfläche verläuft und geschlossen ist. Die beiden Seiten, die die Fläche durchqueren, sind vernachlässigbar klein.
Z
Z
Z
Et · dr = (E2t − E1t ) dr = 0.
rot Et · df =
(F )
F
L
Dass dieses Integral den Wert 0 hat folgt daraus, dass die Rotation des elektrischen Feldes
verschwindet. Entsprechend ist die Tangentialkomponente des Feldes stetig:
E2t = E1t .
3.9
(3.22)
Die Poissongleichung
Wie bereits erwähnt lässt sich das Feld als der negative Gradient eines Potentials schreiben. Weiterhin gilt nach dem Durchflutungsgesetz, dass die Divergenz des Feldes der
Ladungsdichte durch die elektrische Feldkonstante ǫ0 entspricht. Wenn man diese beiden
Eigenschaften kombiniert, so erhält man
div E(r) = −div grad φ(r) = −∆φ(r) =
ρ(r)
.
ǫ0
Die dabei entstehende Gleichung
∆φ(r) = −
ρ(r)
ǫ0
(3.23)
nennt man Poisson-Gleichung. In einem Ladungsfreien Raum hingegen (ρ(r) = 0) erfüllt
das elektrische Potential die Laplace-Gleichung ∆φ(r) = 0. Eine Methode zur Lösung
solcher Differentialgleichungen wurde bereits im Kapitel 2.4 diskutiert und besteht in der
Verwendung einer Greenschen Funktion. Im gegebenen Fall entsprechen die in Gleichung
2.29 gegebenen Funktionen f = φ(r) und g = − ρ(r)
Wir wissen also, dass die Lösung
ǫ0
dieser Gleichung gegeben ist durch
Z
1
φ(r) = −
G0 (r − r′ )ρ(r′ )d3 r.
ǫ 0 R3
Wir erinnern uns an die mathematische Greensche Funktion und definieren in Analogie
dazu eine Greensche Funktion der Elektrostatik:
Ge :=
1
1
.
4πǫ0 |r − r′ |
Mit Hilfe dieser Funktion wird aus obiger Gleichung
Z
Ge (r − r′ )ρ(r′ )d3 r.
φ(r) =
(3.24)
(3.25)
R3
Dies ist nur eine andere Darstellung des bereits in Gleichung 3.9 gegebenen Poisson’schen
Integrals zur Berechnung des Potentials.
THEORETISCHE PHYSIK C
23
3 ELEKTROSTATIK IM VAKUUM
3.10
24
Ausgewählte Potentialprobleme
Mit Hilfe des Poisson’schen Integrals und natürlichen Randbedingungen (φ(∞) = 0) lässt
sich das Potential in jedem Raumgebiet bestimmen und mit Hilfe der Übergangsbedingungen
auch im gesamten Raum ausdrücken. Letztere folgen direkt aus den Stetigkeiten des elektrischen Feldes:
E2n − E1n = E2 · en − E1 · en = −grad φ2 · en + grad φ1 · en
η
∂φ2 ∂φ1
+
= .
= −
∂n
∂n
ǫ0
(3.26)
(3.27)
Die Stetigkeit der Tangentialkomponente lässt sich reduzieren auf generelle Stetigkeit des
Potentials entlang der Grenzfläche, also gilt
φ1 = φ2 .
3.10.1
(3.28)
Unendlich ausgedehnter homogen geladener Zylinder
Wie bei grundsätzlich jedem Problem ist es zunächst wichtig, sich die Symmetrien klar zu
machen. In diesem Falle (man benutzt Zylinderkoordinaten) kann das Potential weder von
ϕ noch von z abhängig sein, da es die Ladungsverteilung auch nicht ist. Dementsprechend
gilt φ(r) = φ(r) und mit den passenden Operator aus Abbildung 1 folgt
∂
ρ0
1 ∂
r φi (r) = −
∆φi (r) =
r ∂r
∂r
ǫ0
für das innere Potential, also für r ≤ R. Das äußere Potential hingegen erfüllt eine LaplaceGleichung, da dort die Ladungsdichte verschwindet. Durch Integration der beiden Gleichungen, das Anwenden natürlicher Randbedingungen (φ(∞) = 0 und φ(0) 6= ±∞) und
das betrachten der Stetigkeitsbedingungen
∂φi (r) ∂φa (r) =
und φi (r)|R = φa (r)|R
∂r R
∂r R
erhält man eine bis auf eine Konstante eindeutig bestimmte Lösung. Wählt man weiterhin
φ(R) = 0 als zusätzliche Bedingung, um diese verbleibende Konstante zu bestimmen, so
ergibt sich
(
1 ρ0
(R2 − r2 )
r<R
.
(3.29)
φ(r) = 4 ǫ10 ρ0 2
r
r≥R
− 2 ǫ0 R ln R
Es ist hierbei zu bedenken, dass r nicht dem Betrag von r entspricht, da wir in Zylinderkoordinaten rechnen. Das Feld bestimmt sich als Gradient dieses Potentials:
(
1 ρ0
r
r<R
∂φ(r)
= er 12 ρǫ00 R2
E(r) = −grad φ(r) = −er
.
(3.30)
∂r
r≥R
2 ǫ0 r
3.10.2
Elektrischer Dipol
Ein elektrischer Dipol besteht aus einer gleich großen positiven und negativen Ladung
q, welche im Abstand a voneinander angeordnet sind. Der Verbindungsvektor der beiden
Ladungen sei damit als a gegeben. Man kann auf Basis dessen das sogenannte Dipolmoment
p=q·a
(3.31)
THEORETISCHE PHYSIK C
24
3 ELEKTROSTATIK IM VAKUUM
25
definieren. Es existieren allerdings auch sogenannte Punktdipole, bei denen dieser Abstand
infinitesimal klein ist. Bei diesen bildet man einen Grenzwert a → 0 so, dass das Produkt
q·a und damit das Dipolmoment stets konstant bleibt. Grundsätzlich ist ein Dipolpotential
gegeben durch die Superposition der Potentiale zweier Monopole. Dementsprechend wird
es (wenn sich eine der Ladungen im Ursprung befindet) beschrieben als
1
q
q
φD =
.
· − +
4πǫ0
r |r − a|
Entwickelt man den hinteren Term in einer Taylorreihe und bildet anschließend den Grenzwert a → 0 (und entsprechend q → ∞, damit p konstant bleibt), so ergibt sich als kurze
Formel für ein Dipolpotential
φD =
1
r·p
1
1
· 3 =−
· p · grad .
4πǫ0 r
4πǫ0
r
(3.32)
Das zugehörige Dipolfeld berechnet sich wie üblich aus dem negativen Gradienten des
Potentials:
1
1
.
ED (r) = −grad φD = −grad −
· p · grad
4πǫ0
r
An dieser Stelle ist Gleichung 2.17 hilfreich, wobei A = p und B = grad 1r sind:
1
1
1
1
1
= p × rot grad + grad × rot p + (p · grad)grad + (grad · grad)p
grad p · grad
r
r
r
r
r
wobei allerdings das Dipolmoment konstant ist und daher alle Terme, in denen eine Ableitung dessen vorkommt, verschwinden. Selbiges gilt für die Rotation eines Gradienten.
Es bleibt also nur
1
1
= (p · grad)grad .
grad p · grad
r
r
Demenstprechend hat das Dipolfeld die Form
1
3(r · p)r
p
1
1
ED (r) =
− 3 .
(p · grad)grad =
4πǫ0
r
4πǫ0
r5
r
(3.33)
Die Ladungsdichte eines Dipols lässt sich schließlich auch ausdrücken als Summe der
Einzelladungen, wobei der Grenzwert a → 0 gebildet wird. Weiterhin wird eine TaylorEntwicklung um den Nullpunkt durchgeführt. Diese Schritte führen somit zu
h a
a i
ρD (r) = lim q δ r −
−δ r+
a→0
2
2
q→∞
h
i
h
i
a
a
≈ lim q · δ(r) − grad δ(r) · + · · · − q · δ(r) + grad δ(r) · + · · ·
a→0
2
2
q→∞
=
lim (−qa · grad δ(r)) = −p · grad δ(r).
a→0
q→∞
Im Falle mehrerer Dipole lässt sich eine Dipoldichte P definieren, für welche dann
Z
dV P(r) = p
(3.34)
V
THEORETISCHE PHYSIK C
25
3 ELEKTROSTATIK IM VAKUUM
26
gilt mit dem Gesamtdipolmoment p. Diese Dipoldichte nennt man im Folgenden auch
Polarisation. Die Dipoldichte mehrere Dipole an den Orten r̄i ist gegeben durch
X
P(r) =
pi δ(r − r̄i ).
(3.35)
i
Die dazu gehörige Ladungsdichte entspricht
X
ρD (r) = −
pi · grad δ(r − r̄i ),
(3.36)
i
was sich durch das Verschwinden von Ableitungen der einzelnen Dipolmomente auch
schreiben lässt als
!
X
pi δ(r − r̄i ) = −div P(r).
(3.37)
ρD (r) = −div
i
Man erkennt also, dass die Quellen der Polarisation Dipole sind, was auch in der Elektrostatik mit Medien erneut das Ergebnis sein wird.
3.11
Multipolentwicklung
Wir wissen bereits, dass das elektrostatische Potential mittels des Poisson’schen Integrals
aus der Ladungsverteilung errrechnet werden kann. Doch auch, wenn der Rechenweg bekannt ist, ist dieser nur schwer durchführbar, da jeder einzelne Punkt der Ladungsverteilung bei der Berechnung des Potentials an jedem einzelnen Raumpunkt berücksichtigt
werden muss. Wenn man allerdings in großen Entfernungen von der Ladung das Potential betrachten will, dann muss man nicht mehr spezifisch den Abstand zwischen jedem
Ladungsort und dem betrachteten Ort des Potentials bestimmen. Man kann also (wir
setzten hierzu die Ladungsverteilung o.B.d.A. in den Ursprung) eine Taylor-Entwicklung
1
′
des Ausdrucks |r−r
′ | um den Punkt r = 0 durchführen. Hierbei benutzen wir auch die
Eigenschaft der Greenschen Funktion, dass Ge (r − r′ ) = Ge (r′ − r). Es ergibt sich
∞
l
′
X
∂
G
(r
−
r
)
1
e
Ge (r − r′ ) =
x′k1 x′k2 . . . x′kl
′
′
′ l! ∂xk1 ∂xk2 . . . ∂xkl ′
l=0
=
=
r =0
∞
X
(−1)l
l=0
∞
X
l=0
l!
l
∂ Ge (r)
x′ x′ . . . x′kl
∂xk1 ∂xk2 . . . ∂xkl k1 k2
(−1)l
Ge,k1 ,k2 ,...,kl (r) x′k1 x′k2 . . . x′kl
l!
wobei die xki jeweils für x, y oder z stehen. Weiterhin gilt allgemein
r2l+1 Ge,k1 ,k2 ,...,kl (r) x′k1 x′k2 . . . x′kl = (r′ )2l+1 Ge,k1 ,k2 ,...,kl (r′ ) xk1 xk2 . . . xkl ,
was sich beispielhaft für l = 1 sehr einfach zeigen lässt:
′
1
1
′
3 xi ′
′
′
′ 3 xi
′ 3
3
xi .
xi = −r 3 xi = −xi xi = −xi xi = −(r ) ′ 3 xi = (r )
r
r ,i
r
(r )
r′ ,i
THEORETISCHE PHYSIK C
26
3 ELEKTROSTATIK IM VAKUUM
27
Daraus folgt eine alternative Darstellung der Reihe der Greenschen Funktion als
∞
X
(−1)l ′ 2l+1
Ge (r − r′ ) =
(r )
Ge,k1 ,k2 ,...,kl (r′ ) xk1 xk2 . . . xkl .
2l+1
l!
r
l=0
Setzt man diese Greensche Funktion in das Poisson’sche integral ein, so ergibt sich das
Potential als
Z
∞
X
(−1)l
dV ′ ρ(r′ ) (r′ )2l+1 Ge,k1 ,k2 ,...,kl (r′ ).
x x . . . x kl
φ(r) =
2l+1 k1 k2
l!
r
V
l=0
Demensprechend lässt es sich auch ausdrücken als Summe zahlreicher einzelner Potentiale:
∞
∞
X
1 X Qk1 k2 ...kl
φ(r) =
φl (r) =
x k 1 x k 2 . . . x kl ,
(3.38)
4πǫ0 l=0 l! r2l+1
l=0
wobei die Faktoren Q die sogenannten Multipolmomente sind. Diese sind konstante Vorfaktoren und sind nicht abhängig von dem Ort, an dem das Potential betrachtet wird. Sie
berechnen sich als
Z
l
dV ′ ρ(r′ ) (r′ )2l+1 Ge,k1 ,k2 ,...,kl (r′ )
Qk1 k2 ...kl = 4πǫ0 (−1)
(3.39)
V
Z
1
′
′
′ 2l+1
l
.
(3.40)
dV ρ(r ) (r )
= (−1)
r′ ,k1 ,k2 ,...,kl
V
Diese Momente sind, wie man an der Anzahl ihrer Indizes sieht, jeweils Tensoren l-ter
Stufe. Die ersten von ihnen werden im Folgenden beispielhaft berechnet.
3.11.1
Moment 0. Ordnung
Für den Fall l = 0 gilt, dass das Multipolmoment ein Skalar ist. Wie in der Rechnung
Z
Z
1
′
′
′ 1
dV ′ ρ(r′ )
(3.41)
=
dV ρ(r ) (r )
Q=
′
r
V
V
ersichtlich wird ist das Moment nullter Stufe die Gesamtladung. Das zugehörige Potential
1 Q
1 Q
φ0 (r) =
=
1
4πǫ0 0! r
4πǫ0 r
ist das bereits bekannte Coulomb-Potential für den Fall, dass die Ladung (wie zu beginn
dieses Unterkapitels o.B.d.A. angenommen) im Ursprung sitzt.
3.11.2
Moment 1. Ordnung
Das Multipolmoment erster Ordnung entspricht dem bereits bekannten Dipolmoment:
Z
Z
1
′
′
′ 3
dV ′ ρ(r′ ) x′i .
(3.42)
dV ρ(r ) (r )
=
Qi = (−1)
′
r ,i
V
V
Das Potential ist also gegeben durch
Z
1 r·p
dV ′ ρ(r′ ) r′ .
(3.43)
mit p =
φ1 (r) =
4πǫ0 r3
V
Man kann weiterhin recht einfach zeigen, dass eine zylindersymmetrische Ladungsverteilung (o.B.d.A. um die z-Achse orientiert, um es in Zylinderkoordinaten einfacher rechnen
zu können) nur ein Dipolmoment entlang ihrer Symmetrieachse besitzt, sowie dass das
Dipolmoment einer kugelsymmetrischen Ladungsverteilung immer verschwindet.
THEORETISCHE PHYSIK C
27
3 ELEKTROSTATIK IM VAKUUM
3.11.3
28
Moment 2. Ordnung
Das Multipolmoment zweiter Ordnung nennt sich auch Quadrupoltensor. Man berechnet
diesen folgendermaßen:
Z
Z
x 1
i
′
′
′ 5
′
′
′ 5
dV ρ(r ) (r )
Qij =
− ′3
dV
ρ(r
)
(r
)
=
′
r
r
,j
V
V
,i,j
Z
δij
3 xi xj
− ′3 .
=
dV ′ ρ(r′ ) (r′ )5
′5
r
r
V
Der Quadrupoltensor ist also bestimmt als
Z
dV ′ ρ(r′ ) (3xi xj − r′2 δij ).
Dij =
(3.44)
V
Dieser Tensor ist weiterhin spurfrei, also ergibt die Summe seiner Diagonalelemte Null,
da
X
XZ
dV ′ ρ(r′ ) (3xi xi − r′2 δii ) = 0.
Dii =
i
i
V
Wie an der Berechnungsformel 3.44 auch recht leicht erkennbar ist ist er außerdem symmetrisch. Daraus folgt, dass der Tensor nur 5 unabhängige Elemente hat, weil einerseits
Dij = Dji und andererseits D33 = −D11 − D22 . Das zugehörige Quadrupolpotential hat
die Form
1 Dij xi xj
1 rT · D · r
φ2 (r) =
=
.
4πǫ0 2r5
4πǫ0
2r5
(3.45)
Das allgemeine Potential einer beliebigen Ladungsanordnung lässt sich also mit Hilfe der
Multipolentwicklung ausdrücken als
1
Q r · p rT · D · r
φ(r) =
+ ··· .
(3.46)
·
+ 3 +
4πǫ0
r
r
2r5
3.11.4
Entwicklung in krummlinigen Koordinaten
In der bisherigen Diskussion wurde die Greensche Funktion in karthesischen Koordinaten
um den Ursprung entwickelt. Führt man diese Entwicklung in Kugelkoordinaten durch, so
sind die in Kapitel 2.5 definierten Legendre-Polynome und Kugelflächenfunktionen sehr
hilfreich. In diesem Falle ist
∞
X 1 r′l
1
1
Ge (r − r ) =
Pl (cos(ϑ)).
=
4πǫ0 |r − r′ |
4πǫ0 rl+1
l=0
′
Auf diese Weise lässt sich das Potential berechnen durch
Z
∞
1 X 1
dV ′ r′l ρ(r′ )Pl (cos(ϑ)).
φ(r) =
l+1
4πǫ0 l=0 r
V
Da die Legendre-Polynome auch durch Kugelflächenfunktionen darstellbar sind entsprechend
l
4π X ∗ ′ ′
Pl (cos(ϑ)) =
Y (ϑ , ϕ )Ylm (ϑ, ϕ)
2l + 1 m=−l lm
THEORETISCHE PHYSIK C
28
3 ELEKTROSTATIK IM VAKUUM
29
ergibt sich also für das Potential die endgültige Darstellung
∞
l
1 X X
1 qlm
φ(r) =
Ylm (ϑ, ϕ)
4πǫ0 l=0 m=−l 2l + 1 rl+1
(3.47)
mit den Multipolmomenten
qlm = 4π
Z
∗
dV ′ r′l ρ(r′ )Ylm
(ϑ′ , ϕ′ ).
(3.48)
V
Für das Monopolmoment ergibt sich auf diese Art beispielsweise
r
Z
√
1
dV ′ ρ(r′ )
q00 = 4π
= 4πQ,
4π
V
das Monopolpotential ist also wie bereits bekannt
r
√
1
4πQ 1
1 Q
=
.
φ0 (r) =
4πǫ0 r
4π
4πǫ0 r
3.12
Potentielle Energie und Energiedichte
3.12.1
Innere Energie einer Ladungswolke
Wie wir bereits aus Kapitel 3.5 wissen ist die Arbeit, die man aufwenden muss, um eine
Ladung Q aus dem Unendlichen an einen Ort r zu verschieben, gegeben ist durch
W = Q · φ(r).
Bringt man also in einem leeren Raum eine Ladung Q1 an einen Ort, ist das Potential in
diese Raum 0 und die Arbeit entsprechend auch. Will man nun eine zweite Ladung Q2
platzieren, ist die Arbeit bereits gegeben durch
W2 = Q 2 ·
Q1
1
.
4πǫ0 |r2 − r1 |
Für die i-te Ladung sind also alle vorherigen Ladungen relevant und die Arbeit ist gegeben
durch
i−1
1 X Qj
Wi = Qi ·
4πǫ0 j=1 |ri − rj |
Bringt man auf diese Art N Ladungen in einen Raum, so ist die Gesamtenergie der
Anordnung gegeben durch die Summe der verrichteten Arbeitsbeträge, also
Wges =
N
X
i=1
i−1
N
1 X X Qj
Wi =
Qi
.
4πǫ0 i=1
|ri − rj |
j=0
Da die jeweiligen Terme unter Vertauschung der Indizes den selben Wert ergeben, kann
man auch zusätzlich über diese Vertauschung summieren und anschließend besagte Summe
durch 2 dividieren. Damit ergibt sich also für die Energie
Wges =
N
X
i=1
THEORETISCHE PHYSIK C
N
N
1 1 X X Qi Qj
.
Wi =
2 4πǫ0 i=1 j=16=i |ri − rj |
(3.49)
29
3 ELEKTROSTATIK IM VAKUUM
30
Weiterhin lässt sich ein Tensor definierten, der den Zusammenhang zwischen Potential
und Ladung darstellt:
φ(ri ) = φi =
i−1
N
1 X Qj
1 X
=
Pij Qj
4πǫ0 j=1 |ri − rj |
4πǫ0 j=1
mit Pii = 0 ∀i. P ist also eine obere Dreiecksmatrix, welche dementsprechend einfach zu
invertieren ist. Mit Hilfe besagter Invertierung erreicht man also
Qi =
N
X
Cij φj
j=1
mit den Kapazitätskoeffizienten Cij . Dementsprechend ist die innere Energie gegeben
durch
N
N
N
1 XX
1X
Cij φj φi .
Qi φi =
W =
2 i=1
2 i=1 j=1
Für Kontinuierliche Ladungsverteilungen wird weiterhin die Summe zur Berechnung der
Energie zu einem Integral und es gilt
Z Z
Z
′
1 1
1
′ ρ(r)ρ(r )
W =
dV dV
=
dV ρ(r)φ(r).
(3.50)
2 4πǫ0 V V
|r − r′ |
2 V
Setzte man an dieser Stelle für die Ladungsverteilung die Poisson-Gleichung an, so ergibt
sich
Z
Z
ǫ0
ǫ0
dV φ(r)∆φ(r) = −
dV ∇ (φ(r)∇φ(r)) − ∇φ(r)∇φ(r)
W = −
2 V
2 V
Z
Z
Z
ǫ0
ǫ0
ǫ0
2
= −
df · (φ(r)∇φ(r)) +
dV (∇φ(r)) =
dV E 2 (r).
2 (V )
2 V
2 V
{z
}
|
=0 weil Rand im Unendlichen
Man definiert also die Energiedichte so, dass das Integral über sie die Gesamtenergie
ergibt, also als
Z
ǫ0
dV wel (r) ⇔ wel (r) = E 2 (r).
W =
(3.51)
2
V
3.12.2
Äußere Energie zweier Ladungswolken
Betrachtet man nun einen Raum, der anders als in der bisherigen Annahme nicht vollkommen leer ist, sondern bereits eine Ladungsverteilung ρa (r) beinhaltet, so ist die Wechselwirkungsenergie zwischen dieser vorhandenen Ladung und einer neue eingebrachten,
bezeichnet als ρn (r), sehr analog zu den bisherigen Methoden berechenbar mit
Z
Z Z
′
1
′ ρn (r)ρa (r )
dV dV
dV ρn (r)φa (r).
(3.52)
=
W =
4πǫ0 V V
|r − r′ |
V
Man bemerke, dass der Faktor 21 im Unterschied zur inneren Energie in dieser Formel
nicht auftaucht. Setzt man hier nun zwei Punktladungen ein, also deltaförmige Ladungsverteilungen, so ergibt sich die Wechselwirkungsenergie von 2 benachbarten diskreten
Ladungen, diese beträgt
Q1 Q2
1
.
W =
4πǫ0 |r1 − r2 |
Durch Bildung des negativen Gradienten (nach r1 ) aus dieser Formel erhält man die Kraft
auf Ladung Q1 und sieht, dass sie mit der bereits bekannten Coulomb-Kraft übereinstimmt.
THEORETISCHE PHYSIK C
30
3 ELEKTROSTATIK IM VAKUUM
3.12.3
31
Energie einer Ladungsverteilung im äußeren Feld
Nun betrachten wir eine räumlich sehr klein ausgedehnte Ladungsverteilung um den Ort r.
Die Berechnungen zu diesem Problem werden also in einem Schwerpunktsystem bezüglich
dieses zentralen Punktes der gegebenen Ladungsverteilung durchgeführt. Dementsprechend lässt sich ausgehend von den bereits hergeleiteten Formeln von einer Energie der
Form
Z
dV ′ ρn (r + r′ )φa (r + r′ )
W =
V
sprechen. Das Potential φa wird hierbei von einer Ladung erzeugt, welche sich außerhalb
des betrachteten Bereichs (in relativ weiter Ferne) befindet. Daher sind die Unterschiede,
die durch die jeweiligen Verschiebungen der Ladungspunkte um den Vektor r′ entstehen,
nur sehr gering und man kann das Potential in einer Taylor-Reihe entwickeln. Damit folgt
also
1
φa (r + r′ ) ≈ φa (r) + φa,i (r)x′i + φa,i,j (r)x′i x′j + · · ·
2
1
= φa (r) − Eai (r)x′i − Eai,j (r)x′i x′j + · · ·
2
1
= φa (r) − Eai (r)x′i −
3x′i x′j − x′l x′l δij Eai,j (r) + · · ·
6
weil div Ea = Eai,i = Eai,j δij = 0 im betrachteten Raumgebiet. Setzt man dieses Potential nun in obige Gleichung zur Berechnung der Energie ein und drückt das Ergebnis
durch Multipolmomente aus, so ergibt sich
1
W = Qn φa (r) − pn · Ea (r) − Dn ij Eai,j (r) + · · · .
6
3.12.4
(3.53)
Dipol-Dipol-Wechselwirkung
Die Energie eines Dipols im elektrischen Feld lässt sich leicht ablesen als der zweite Term
dieser Entwicklung und sie beträgt
WD = −p · E(r).
Will man nun die Wirkung eines Dipols auf einen anderen Untersuchen, so nimmt man
für E ein Dipolfeld der Form
E(r) =
1 3r(r · p1 ) − r2 p1
4πǫ0
r5
an. Dementsprechend gilt für die Energie je eines dieser Dipole im Feld des anderen
WDD =
1 p1 · p2 − 3( rr · p1 )( rr · p2 )
.
4πǫ0
r3
(3.54)
Da immer die Lage der niedrigsten Energie am günstigsten und stabilsten ist werden
sich zwei nebeneinander liegende Dipole antiparallel und hintereinander liegende Dipole
parallel ausrichten, was direkt aus dieser Formel hervorgeht.
THEORETISCHE PHYSIK C
31
3 ELEKTROSTATIK IM VAKUUM
3.12.5
32
Kraft auf Ladung im äußeren Feld
Zur Berechnung der Kraft bilden wir den negativen Gradienten der Energie, wobei als
solche nur die ersten beiden Terme der Gleichung 3.53 betrachtet wird. Diese Kraft ist
also
F = −grad W = Qn Ea (r) + grad (pn · Ea (r).
Mit Hilfe der Konstanz von p, dem Verschwinden von rot E in der Elektrostatik und
Gleichung 2.17 ergibt sich daraus schließlich
F = Qn Ea (r) + (pn · grad)Ea (r)
(3.55)
wobei deutlich erkennbar der erste der Monopol- und der zweite der Dipolterm ist.
3.12.6
Drehmoment auf Ladung im äußeren Feld
Ein Feld kann auf Ladungen nicht nur eine Kraft, sondern auch ein Drehmoment ausüben.
Unter der Annahme, dass die Kraftdichte gegeben ist durch
f(r) = ρn (r) Ea (r)
ergibt sich entsprechend für die Drehmomentdichte
m(r + r′ ) = r′ × f(r + r′ ) = r′ ρn (r + r′ ) × Ea (r + r′ ) ≈ r′ ρn (r + r′ ) × Ea (r).
Das gesamte Drehmoment errechnet sich wie üblich als Integral über diese Dichte und ist
somit bestimmt durch
Z
Z
′ ′
′
′
′
dV r ρn (r + r ) × Ea (r) = pn × Ea (r).
(3.56)
M(r) = dV m(r + r ) =
v
THEORETISCHE PHYSIK C
V
32
4 ELEKTROSTATIK MIT LEITERN
4
33
Elektrostatik mit Leitern
In Anwesenheit von Leitern sind zunächst einige Besonderheiten zu beachten:
• Innerhalb idealer Leiter ist das Potential konstant und somit das Feld Null.
• Feldlinien stehen senkrecht auf der Oberfläche.
• Quellen und Senken des Feldes bestehen in der Oberflächenladung.
Weiterhin muss die Richtung von Normalenvektoren stets bedacht werden. Diese zeigen
jeweils aus dem Integrationsvolumen heraus, was allerdings bedeutet, dass sie in die Leiter hinein zeigen, falls über den äußeren Raum integriert wird. Die bei der Berechnung
der Geometriekoeffizienten auftauchenden Normalableitungen nach n′ haben eben diese
Eigenschaft, dass die betrachtete Komponente in den Leiter hinein zeigt.
4.1
Oberflächenladungen
Wir kennen bereits aus Kapitel 3.8 die Übergangsbedingungen für das elektrische Feld.
Wenden wir auf diese nun an, dass das Feld im Innern eines Leiters verschwindet, so ergibt
sich daraus für das äußere Feld Ea
Ean =
η
und Eat = 0.
ǫ0
Die Oberflächenladungen auf einer Oberfläche Li lassen sich also berechnen als
∂φ(r) ηi (r) = ǫ0 · n · Ea (r)|Li = −ǫ0
.
∂n Li
(4.1)
Weiterhin gilt für die Raumladungen die altbekannte Poisson-Gleichung
∆φ(r) = −
4.2
ρ(r)
.
ǫ0
Anwendung der Greenschen Funktion
Auch in diesem Falle kann zur Lösung der Poisson-Gleichung die Greensche Funktion
verwendet werden, allerdings ist eine kleine Modifikation des Vorgehens notwendig.
Z
′
′
′ ∂φ(r )
′ ∂Ge (r, r )
′
− Ge (r, r )
df φ(r )
−Γ(r) := ǫ0
∂n′
∂n′
(V )
Z
df′ · [φ(r′ ) grad Ge (r, r′ ) − Ge (r, r′ ) grad φ(r′ )]
= ǫ0
(V )
Z
dV ′ [φ(r′ ) ∆Ge (r, r′ ) − Ge (r, r′ ) ∆φ(r′ )]
= ǫ0
ZV
= −
dV ′ [φ(r′ ) δ(r − r′ ) − Ge (r, r′ )ρ(r′ )]
Z V
dV ′ Ge (r, r′ )ρ(r′ ) − φ(r).
=
V
THEORETISCHE PHYSIK C
33
4 ELEKTROSTATIK MIT LEITERN
34
Das Potential berechnet sich also mittels
Z
dV ′ Ge (r, r′ )ρ(r′ ) + Γ(r).
φ(r) =
(4.2)
V
Durch die Eigenschaft der Greenschen Funktion, dass sie so gewählt wird, dass sie am
Rand verschwindet (durch Wahl einer geeigneten zusätzlichen Funktion F wie in Kapitel
2.4 beschrieben) lass sich der Geometriekoeffizient Γ folgendermaßen schreiben:
Z
∂Ge (r, r′ )
df ′ φ(r′ )
Γ(r) = −ǫ0
(4.3)
∂n′
(V )
4.3
Erste Grundaufgabe
Gegeben sei die Raumladung ρ(r) sowie alle konstanten Potentiale φi auf den Leiteroberflächen Li . In diesem Fall geht man in folgender Reihenfolge vor:
1. Berechnung des gesamten Potentials φ(r).
2. Berechnung der Oberflächenladungen auf den einzelnen Leitern mit Gleichung 4.1.
R
3. Berechnung der Gesamtladung auf den Leitern Qi = Li η(r) df .
Das Potential lässt sich in diesem Fall beschreiben durch
Z
X Z
∂Ge (r, r′ )
′
′
′
df ′ ǫ0
dV Ge (r, r )ρ(r ) −
φi
φ(r) =
.
′
∂n
L
V
i
i
i
|
{z
}
{z
}
|
=:φρ (r)
(4.4)
=:−Γi (r)
Die Koeffizienten Γi (r) sind hierbei konstant auf den jeweiligen Leiteroberflächen, nämlich
1 auf Oberfläche i und 0 auf allen anderen. Weiterhin ist ∆Γi (r) = 0.
4.4
Zweite Grundaufgabe
Gegeben
R sei nun die Raumladung ρ(r) sowie die Gesamtladung auf jedem der Leiter
Qi = Li η(r) df . Die Reihenfolge zur Lösung dieses Problems ist die folgende:
1. Berechnung des gesamten Potentials φ(r).
2. Berechnung der Oberflächenladungen auf den einzelnen Leitern mit Gleichung 4.1.
3. Berechnung des Potentials auf den Leitern φi .
Die gegebenen Ladungen auf den Oberflächen sind gegeben als
Qj
!
Z
X
∂φ(r)
∂
df = −ǫ0
=
η(r) df = −ǫ0
φρ (r) +
φi Γi (r) df
Lj
Lj ∂nj
Lj ∂nj
i
Z
Z
X
X Z ∂Γi (r)
∂φρ (r)
η ind (r) df +
φi Cij
φi
df − ǫ0
df =
= −ǫ0
∂nj
∂n
j
L
L
Lj
i
j
i
i
X
ind
= Qj +
φi Cij
Z
Z
i
THEORETISCHE PHYSIK C
34
4 ELEKTROSTATIK MIT LEITERN
35
mit den geometrieabhängigen Kapazitätskoeffizienten Cij . Diese berechnen sich als
Z
Z Z
∂ 2 Ge (r, r′ ) ′
∂Γi (r)
2
df = ǫ0
df df.
(4.5)
Cij = Cji = −ǫ0
∂n′i ∂nj
Lj ∂nj
Lj Li
Das Potential auf einer Oberfläche entsteht also aus der Differenz der Ladung auf der
Oberfläche selbst und der darauf induzierten Ladung, es lässt sich über die Invertierung
der Matrix der Kapazitätskoeffizienten berechnen:
X
X
Qj = Qind
+
φ
C
⇒
φ
=
Cij−1 (Qj − Qind
(4.6)
i ij
i
j
j ).
i
4.5
4.5.1
j
Beispiele zur Berechnung
Halbraum als Leiter
Im folgenden sei o.B.d.A. die Leiteroberfläche als die y-z-Ebene gewählt, alle Bereiche
mit x < 0 sind im Leiter, alle Bereiche mit x > 0 außerhalb dessen. man sucht nun also
eine Greensche Funktion, welche in der y-z-Ebene verschwindet und die natürlich auch
alle anderen geforderten Eigenschaften (bezüglich Laplace im betrachteten Raumbereich
außerhalb des Leiters und Vertauschung der Argumente) erfüllt. Eine solche Funktion ist
gegeben durch
1
1
1
′
GHalbraum (r, r ) =
.
(4.7)
·
−
4πǫ0 |r − r′ | |r − r′S |
Hierbei ist der Ort r′S = (−x′ , y ′ , z ′ )T der Ort, der genau auf der anderen Seite der Grenzfläche zu r = (x′ , y ′ , z ′ )T ist. Mit Hilfe dieser Funktion kann man nun alle notwendigen
Rechnungen anstellen. Zunächst ist das Potential einer Punktladung (ρ(r) = δ(r − r))
gegeben als
q
1
1
φ(r) =
.
(4.8)
·
−
4πǫ0 |r − r| |r − rS |
Entsprechend ergibt sich das Potential eines Dipols (ρ(r) = −p · grad δ(r − r)) mit
Gleichung 2.28 zur Ableitung der Delta-Distribution als
r − rS
1
r−r
φD (r) =
.
(4.9)
− pS ·
· p·
4πǫ0
|r − r|3
|r − rS |3
Der Geometriekoeffizient dieser Anordnung ist 1 im gesamten Raum. Das Potential, auf
dem der Leiter liegt, muss also als im gesamten Raum konstanter Wert zum Potential
addiert werden, das durch die Ladung erzeugt wird. Die insgesamt auf der Oberfläche
induzierte Ladung entspricht im Falle einer Punktladung q genau −q, sodass die Ladung
des Gesamtsystems ausgeglichen ist.
4.5.2
Kugel als Leiter
Nun betrachten wir den Fall eines kugelförmigen Leiters mit Radius R, in dessen Innerem
sich eine Ladung (ein Dipol, ...) befinde. Eine Greensche Funktion, die auf der Oberfläche
dieser Kugel verschwindet, ist gegeben durch
"
#
1
1
R
1
·
−
GKugel (r, r′ ) =
.
(4.10)
2
4πǫ0
|r − r′ | r′ |r − R
r′ |
r ′2
THEORETISCHE PHYSIK C
35
4 ELEKTROSTATIK MIT LEITERN
36
Mit dieser Funktion ist der Geometriekoeffizient Γ(r) = Rr und somit auf der gesamten
Kugeloberfläche, weshalb für das gesamte Potential auch hier zu φρ nur der konstante
Term φi auf der Leiteroberfläche addiert werden muss.
4.6
Raumladungsfreie Probleme
Falls die Raumladung im betrachten Gebiet Null (ρ(r) = 0) ist, verschwindet auch das
von ihr erzeugte Potential φρ . Dementsprechend gilt
X
X Z
∂Ge (r, r′ )
φ(r) =
φi Γi (r) = −
φi
df ′ ǫ0
∂n′i
Li
i
i
sowie für die Ladung auf der Oberfläche
X
X
Qj =
φi Cij ⇔ φi =
Cij−1 Qj
i
j
mit den Kapazitätskoeffizienten aus Gleichung 4.5. Die Terme auf der Hauptdiagonalen
beschreiben dabei die Eigenkapazitäten der einzelnen Leiter.
4.6.1
Beispiel: Zwei Leiter
Bei zwei Leitern ergibt sich das Gleichungssystem
Q1 = C11 φ1 + C12 φ2
Q2 = C21 φ1 + C22 φ2 .
Da wie bekannt das elektrische Feld an den Oberflächen der Leiter verschwindet und
das Oberflächenintegral über besagtes Feld der darin eingeschlossenen Ladung entspricht
(Gauß-Gesetz, siehe Kapitel 2.21) ist die Gesamtladung des Systems 0 (Q1 = −Q2 ).
Daraus folgt
(C11 + C21 )φ1 + (C12 + C22 )φ2 = 0.
für beliebige Potentiale φ1 und φ2 . Entsprechend kann man folgende Definitonen vornehmen:
C12 = C21 =: −C C11 = C22 = −C12 =: C.
Daraus folgt schließlich für den Zusammenhang von Kapazität und Potential
Q1 = C11 φ1 + C12 φ2 = C(φ1 − φ2 ).
Betrachtet man nun den Fall eines Plattenkondensators mit Plattengröße A, so verwendet
man als Ansatz für das Potential (Lösung der Laplace-Gleichung in einer Dimension)
φ = A · x + B, wobei φ1 = B und φ2 = A · d + B. Mit diesem Ansatz folgt also
φ2 − φ1
x
x
x + φ1 = φ1 1 −
+ φ2 = φ1 Γ1 (x) + φ2 Γ2 (x).
φ(x) =
d
d
d
Die auf diese Weise definierten Geometriekoeffizienten ergeben auf der zugehörigen Oberfläche wieder genau den Wert 1 und auf der anderen Oberfläche 0. Mit Ihrer Hilfe lassen
sich gemäß deren Definition die Kapazitäten berechnen, es ist
Z
A
∂Γ1 (x) = ǫ0 .
df
C = C11 = −ǫ0
∂x x=0
d
(1)
THEORETISCHE PHYSIK C
36
4 ELEKTROSTATIK MIT LEITERN
4.6.2
37
Beispiel: Kugelkondensator
Ein Kugelkondensator besteht aus zwei kugelförmigen Platten, welche konzentrisch umeinander angeordnet sind. Der Radius der äußeren sei als R2 , der der inneren als R1 bezeichnet. Für eine solche Geometrie sucht man nach einem kugelsymmetrischen Lösungsansatz
für die Laplace-Gleichung in Kugelkoordinaten, welcher durch φ(r) = Ar + B gegeben ist.
Mit den Randbedingungen auf den Platten φ1 und φ2 ergibt sich somit ein Potential der
Art
R1
R2
φ1 R2 −R1 r − 1 R1 ≤ r ≤ R2
.
φ(r) = φ1
r ≤ R1
0
R2 < r
Drückt man das Potential im Zwischenraum der Platten mit einem Geometriekoeffizient
aus, so ergibt sich
R2
R1
−1 ,
φ(r) = φ1 Γ1 (r) ⇒ Γ1 (r) =
R2 − R1 r
womit dieser Koeffizient auf der äußeren Schale verschwindet und auf der inneren genau
1 ist. Hiermit lässt sich also die Kapazität berechnen:
Z
∂Γ1 (r) R1 R2
df
C = C11 = −ǫ0
.
= 4πǫ0
∂r r=R1
R2 − R1
Kugel
Daraus wiederum resultiert mit Q1 = φ1 C die Ladung auf der inneren und mit Q2 = −Q1
jene auf der äußeren Platte.
4.7
Energie und Kraft
Wir wissen, dass sich die Energie als das Integral über die Ladung und das äußere Potential
berechnet, nun müssen allerdings auch die Oberflächenladungen mit betrachtet werden.
Z
Z
1X
1
(4.11)
dV ρ(r) φ(r) +
φi
dfi ηi (r)
W =
2 V
2 i
Li
{z
}
|
=Qi
Z
1
1X
1 XX
=
dV ρ(r) φ(r) +
φi Qind
+
Cij φi φj .
(4.12)
i
2 V
2 i
2 i j
Setzt man an dieser Stelle nun den bekannten Zusammenhang für das Potential φi aus
Gleichung 4.6 ein, so ergibt sich schließlich
Z
1 X X −1
1
dV ρ(r) φ(r) +
C (Qj − Qind
(4.13)
W =
j )Qi .
2 V
2 i j ij
Die Kraft ergibt sich hieraus wieder als der negative Gradient, da F = −grad W .
THEORETISCHE PHYSIK C
37
5 ELEKTROSTATIK MIT DIELEKTRIKA
5
39
Elektrostatik mit Dielektrika
Bisher haben wir ausschließlich das Vakuum betrachtet, womit die behandelte Theorie
nur einen kleinen Teil der Wirklichkeit abdeckt. Im Folgenden werden nun Materialien
betrachtet, die polarisierbar sind, in denen also durch ein externes Feld Dipole ausgerichtet
werden können. Wir nutzen hierzu das Polarisationsfeld (die Dipoldichte)
X
PD (r) =
pi δ(r − ri )
(5.1)
i
das wir bereits aus Kapitel 3.10.2 kennen. Aufgrund der Ausrichtung solcher elementarer Dipole ist es nicht mehr sinnvoll, das Feld mikroskopisch an jedem Raumpunkt zu
beschreiben, sondern besser, eine räumliche Mittelung über kleine Raumbereiche durchzuführen. Das Feld ist also gegeben durch
Z
1
hE(r)i =
dṼ E(r + r̃).
∆V ∆V
Das Potential einer Dipolverteilung entsprechend der oben definierten Polarisation ist
Z
1
1
hφ(r)i = −
dV ′ P(r′ ) · gradr
(5.2)
4πǫ0 V
|r − r′ |
wobei die hierin auftretende Polarisierung P(r′ ) auch ein räumliches Mittel von PD (r′ )
ist. Mit Hilfe von
P(r′ )
1
1
1
′
′
= P(r ) · gradr′
= divr′
−
· divr′ P(r′ )
−P(r ) · gradr
′
′
′
|r − r |
|r − r |
|r − r |
|r − r′ |
lässt sich dieses gemittelte Potential schließlich schreiben als
Z
Z
′
′
1
1
′ ηpol (r )
′ ρpol (r )
hφ(r)i =
df
dV
+
4πǫ0 (V )
|r − r′ | 4πǫ0 V
|r − r′ |
(5.3)
mit der Polarisationsladung
ρpol (r) = −div P(r)
(5.4)
und der Oberflächenpolarisationsladung
ηpol (r) = P(r) · en .
(5.5)
Die gesamte Polarisationsladung ist hierbei stets Null, weil
Z
Z
Z
Z
′
′
′
′
′
′
Qpol =
dV ρpol (r ) +
df ηpol (r ) = −
dV div P(r ) +
df′ · P(r)
V
(V )
V
(V )
Z
Z
= −
df′ · P(r′ ) +
df′ · P(r) = 0.
(V )
5.1
(V )
Die Dielektrische Verschiebung (D-Feld)
Die gesamte Ladung ist die Summe der existierenden Raumladung und der Polarisationsladung, also
ρges (r) = ρext (r) + ρpol (r).
(5.6)
THEORETISCHE PHYSIK C
39
5 ELEKTROSTATIK MIT DIELEKTRIKA
40
Dementsprechend gilt mit der ersten Maxwell-Gleichung (Gauß-Gesetz), dass
ǫ0 div E(r) = ρges (r) = ρext (r) + ρpol (r) = ρext (r) − div P(r)
und für eine neu eingeführte Größe D gilt:
div D(r) := div [ǫ0 E(r) + P(r)] = ρext (r).
(5.7)
Weiterhin gibt es auch einen bestimmten Zusammenhang zwischen den Feldern E und
P, welcher je nach Art der Polarisation unterschiedlich dargestellt werden kann. Für den
Fall der Verschiebungspolarisation (wird direkt vom Feld erzeugt und verhält sich linear
dazu) hat dieser die Form
P(r) = ǫ0 N αE(r),
(5.8)
wobei N die Teilchenzahldichte und α die Polarisierbarkeit des Materials ist. Ist hingegen
der Fall von Orientierungspolarisation gegeben, sind also die elementaren Dipole bereits
im Material vorhanden und werden nicht erst vom Feld erzeugt, so besteht das P-Feld
nur durch Orientierung dieser kleinen Dipole, welche natürlich durch thermische Bewegung und im Zuge des Anstiegs der Entropie wieder nachlässt. In diesem Falle lauter der
Zusammenhang
N p20
E(r)
(5.9)
P(r) =
3kB T
mit der Boltzmann-Konstante kB und dem Betrag des Dipolmoments eines Elementardipols p0 . Eine Dritte Klasse von Stoffen, sogenannte Ferroelektrika, bei denen eine Dipolausrichtung auch ohne äußeres Feld bereits vorhanden sein kann, wird im Rahmen der
Vorlesung nicht diskutiert.
Allgemein wird der Zusammenhang der beiden Felder für Materialien, die in die ersten
beiden Gruppen fallen, beschrieben als
Pi (r) = ǫ0 χij (r)Ej (r)
(5.10)
mit der Suszeptibilität χ, die im einfachsten Falle ein Skalar und ortsunabhängig ist, was
dann zu P(r) = ǫ0 χE(r) führt.
5.2
Übergangsbedingungen
Mit Hilfe der Maxwellgleichung
div D(r) = ρext (r) ⇔
Z
(V )
df · D(r) = Qext
stößt man durch ähnliches Vorgehen wie in Kapitel 3.8 (Integration über die Oberflächen
eines unendlich dünnen Zylinders) auf
ηext (r) = Dna (r) − Dni (r)
ηext (r) = ǫ0 ǫa Ena (r) − ǫ0 ǫi Eni (r)
∂φa (r)
∂φi (r)
ηext (r) = −ǫ0 ǫa
+ ǫ0 ǫi
.
∂n
∂n
Ohne eine externe Ladung ist also die Normalkomponente des D-Feldes erhalten. Für die
bereits im Vakuum geltende Stetigkeit der Tangentialkomponente des E-Feldes ändert
sich unter dem Einfluss von Dielektrika nichts.
THEORETISCHE PHYSIK C
40
5 ELEKTROSTATIK MIT DIELEKTRIKA
5.3
41
Potentialberechnung
Bevor ein Potential berechnet werden kann, muss zunächst eine korrekte Poisson-Gleichung
gefunden werden, mit deren Hilfe diese errechenbar ist. Dazu benötigt man zunächst einen
funktionalen Zusammenhang zwischen D und E:
D(r) = ǫ0 E(r) + ǫ0 χ(r)P(r) = ǫ0 ǫ(r)E(r) mit ǫ(r) = χ(r) + 1.
(5.11)
Aus dieser ergibt sich schließlich
ǫ0 div [ǫ(r)E(r)] = ρext (r) = ǫ0 E(r) · grad ǫ(r) + ǫ0 ǫ(r)div E(r)
= −ǫ0 grad φ(r) · grad ǫ(r) − ǫ0 ǫ(r)∆φ(r)
und letztendlich die gewünschte Poisson-Gleichung für das Potential:
∆φ(r) +
ρext (r)
1
grad ǫ(r) · grad φ(r) = −
.
ǫ(r)
ǫ0 ǫ(r)
(5.12)
Die Lösung einer solchen Gleichung ist äußerst kompliziert und wird daher nicht durchgeführt. Im Falle eines homogenen Mediums allerdings ist ǫ(r) = ǫ = konstant, also gilt
∆φ(r) = −
ρext (r)
.
ǫ0 ǫ
(5.13)
Ist der betrachtete Raum in einzelne Teilräume unterteilt, muss für jeden dieser Teilräume
diese Gleichung gelöst werden und danach mit Übergangsbedingungen eine allgemeine
Lösung formuliert werden.
Auch in diesem Fall homogener Dielektrika lässt sich die Greensche Funktion zum Lösen
von Potentialproblemen verwenden, jedoch muss sie nun zusätzlich durch einen Faktor
ǫ dividiert werden. Weiterhin muss man eine Funktion für jeden Raumbereich mit unterschiedlicher Dielektrizitätszahl aufstellen, sodass auch für jeden Bereich ein anderes
Potential entsteht, welches an der Grenzfläche miteinander in Verbindung gebracht werden muss. Als Beispiel wird im Folgenden das Potential einer Punktladung vor einer
Grenzfläche zweier Dielektrika ǫ1 (darin befinde sich die Ladung) und ǫ2 berechnet. Die
beiden Ansätze für Greensche Funktionen sind
1
1
A
′
+
G1 (r, r ) =
4πǫ0 ǫ1 |r − r′ | |r − r′S |
1
B
G2 (r, r′ ) =
4πǫ0 ǫ2 |r − r′ |
wobei r′S eine Spiegelladung wie bereits beim Problem eines Halbraumes als Leiter (siehe
Kapitel 4.5.1) ist, die durch Spiegelung der zur Grenzfläche orthogonalen Koordinate von
r′ an besagter Grenzfläche entsteht. Durch die Forderung, dass die beiden Funktionen an
der Grenzfläche stetig ineinander übergehen, erhalten wir
A=
ǫ1 − ǫ2
2ǫ2
und B =
.
ǫ1 + ǫ2
ǫ1 + ǫ2
Setzt man nun als Ladungsdichte eine Punktladung in ǫ1 ein, so kann man deren Potential
berechnen. Weiterhin findet man dann, dass es keine Polarisationsraumladung gibt und
dass die Polarisationsoberflächenladung der Differenz der Normalkomponenten des PFeldes auf beiden Seiten der Oberfläche entspricht.
THEORETISCHE PHYSIK C
41
5 ELEKTROSTATIK MIT DIELEKTRIKA
5.4
5.4.1
42
Raumladungsfreie Probleme
Homogen polarisierte Kugel
Betrachtet man eine Kugel, welche bereits ohne Einwirkung eines weiteren Feldes polarisiert ist entsprechend P = p · ez , so lässt sich deren Potential berechnen als
Z
Z
1
1
1
1
′
dV P(r) gradr
dV ′
φ(r) = −
= −P(r) gradr
.
′
4πǫ0 V
|r − r |
4πǫ0 |r − r′ |
V
Der Term hinter dem Gradient lässt sich aus Kapitel 3.7.1 entnehmen (für ρ0 = 1), womit
sich durch Anwendung von p = 43 πR3 P = V P das folgende Potential ergibt:
(
1 p·r
r>R
4πǫ0 r3
φ(r) = P·r
r ≤ R.
3ǫ0
Das elektrische Feld ist n der negative Gradient dessen, was durch grad (P · r) = (P ·
grad)r = P zum Ausdruck
(
1 3 (p·r)·r−r 2 p
r>R
r5
E(r) = 4πǫP0
r≤R
− 3ǫ0
führt. Man erkennt also, dass dieses Feld außerhalb der polarisierten Kugel selbst ein
gewöhnliches Dipolfeld ist. Im Innern hingegen steht es entgegengesetzt zur Polarisation,
weshalb die Verschiebungsdichte sich berechnen lässt als
2
P
+ P = P.
D = ǫ0 E + P = ǫ0 · −
3ǫ0
3
5.4.2
Kugelförmiger Hohlraum im Dielektrikum
Nun betrachten wir den entgegengesetzten Fall, nämlich dass in einem ansonsten den
ganzen Raum bedeckenden Dielektrikum ein kugelförmiger Hohlraum besteht. Das von
der Polarisation erzeugte Feld steht im Inneren des Hohlraumes also parallel zum äußeren
Feld und es gilt
P
.
Ei = Ea +
3ǫ0
Dementsprechend stehen Polarisation und äußeres Feld im Verhältnis
P = 3ǫ0 · (Ei − Ea ) = 3ǫ0 ·
3ǫa
ǫa − ǫ i
· Ea −Ea
· Ea .
= 3ǫ0
2ǫa + ǫi
2ǫa + ǫi
|
{z
}
=Ei
Das hierbei verwendete Verhältnis des äußeren und inneren Feldes wird in den Übungsaufgaben
hergeleitet.
5.5
Clausius-Mosotti-Formel
Man muss generell zwischen zwei Feldern unterscheiden: Dem lokalen Feld in einem sehr
kleinen Raumbereich, welcher nur einzelne Atome beinhaltet, und dem mittleren Feld
THEORETISCHE PHYSIK C
42
5 ELEKTROSTATIK MIT DIELEKTRIKA
43
über ein größeres Volumen. Für ersteres gilt der Zusammenhang P = ǫ0 αatom N Elok , für
letzteres hingegen P = ǫ0 χE, wobei N die Ladungsträgerdichte und αatom die atomare
Polarisierbarkeit ist. Verwendet man nun, dass das lokale Feld gleich dem globalen korrigiert um einen Polarisationsterm ist, wie wir ihn bereits eben bestimmt haben, so erhält
man
P
N αatom
.
(5.14)
Elok = E +
⇒ χ=ǫ−1=
3ǫ0
1 − N α3atom
5.6
Feldenergie
Wir kennen bereits aus der Betrachtung des Vakuums die Formel
Z
Z
1
ǫ0
Wρ =
dV φ(r)ρges (r) =
dV E 2 (r)
2 V
2 V
(5.15)
mit der gesamten Ladung ρges (r) = ρext (r) + ρpol (r) = −ǫ0 ∆φ(r). In der Anordnung ist
nun allerdings auch eine andere Art von Energie gespeichert. Wird die Polarisation durch
das Feld aufgebaut und ist nicht schon vorher vorhanden, so benötigt dies eine gewisse
Arbeit. Die notwendige Energiemenge, um einen Dipol im elektrischen Feld auszurichten,
beträgt WD = 21 · p · E, die zugehörige Energiedichte für viele Dipole dementsprechend
wD = 21 · P · E. Daraus folgt die Energie zum Aufbau einer einheitlichen Polarisation der
Größe
Z
1
WP =
dV P(r) · E(r).
(5.16)
2 V
Die Gesamtenergie des Systems drückt sich also aus als
Z
Z
1
2
dV P(r) · E(r)
dV E (r) +
ǫ0
W = Wρ + WP =
2
V
V
beziehungsweise unter Verwendung von D(r) = ǫ0 E(r) + P(r) lässt sie sich kurz formulieren als
Z
Z
1
1
W =
dV D(r) · E(r) =
dV φ(r)ρext (r).
(5.17)
2 V
2 V
Dies folgt ebenso, wenn man zeigt, dass
Z
Z
1
1
dV P(r) · E(r) = −
dV φ(r)ρpol (r).
2 V
2 V
Dieser letzte Term beschreibt auch die Differenz der Energien auf beiden Seiten der Grenzfläche des Dielektrikums zum Vakuum, an welchen D stetig ist, weil es orthogonal dazu
verläuft. Das E-Feld in obigem integral ist allerdings explizit jenes im Vakuum, da es an
der Grenze unstetig ist (verläuft nicht tangential).
5.7
Kraftdichte
Wie zu jeder Größe kann man auch zur Kraft eine Dichte formulieren. Die elektrische
Kraftdichte in Dielektrika ist gegeben durch
1
f (r) = ρext (r)E(r) − ǫ0 E 2 (r) grad ǫ(r).
2
(5.18)
Eine genaue Herleitung dieses Zusammenhangs findet sich im Skript auf den Seiten 110
und 111.
THEORETISCHE PHYSIK C
43
5 ELEKTROSTATIK MIT DIELEKTRIKA
5.8
44
Maxwell’scher Spannungstensor
Wenn man die eben definierte Kraftdichte in Komponenten formuliert, so ergibt sich
1
1
fi = ρext Ei − ǫ0 Ej Ej ǫ,i = Dj,j Ei − ǫ0 Ej Ej ǫ,i
2
2
1
1
= (Dj Ei ),j − Dj Ei,j − (Ej Dj ),i + Dj Ej,i = (Dj Ei ),j − (Ek Dk ),i
2
2
1
.
=
Ei Dj − δij Ek Dk
2
,j
Man definiert also den Inhalt der großen Klammer als (symmetrischen) Spannungstensor
1
Tij = Tji = Ei Dj − δij Ek Dk = Ei Dj − δij w.
2
(5.19)
Auf diese Weise berechnet sich die Kraftdichte über die Divergenz dieses Tensors, also
Z
fi = Tij,j ⇒ f(r) = div T(r) ⇒ F(r) =
df · T(r).
(5.20)
(V )
Wie man sieht ist also entspricht also die gesamte Kraft auf ein Volumen V dem Integral
des Spannungstensors über seine Oberfläche (V ). Auf diese Weise kann man also die
Kräfte in alleiniger Abhängigkeit von den Feldern berechnet werden.
THEORETISCHE PHYSIK C
44
6 MAGNETOSTATIK
6
45
Magnetostatik
Bislang haben wir uns mit Feldern und Potentialen sowie den durch diese entstehenden
Kräften befasst, die von stationären, also ortsfesten Ladungen bewirkt wurden. Im Folgenden wollen wir auch gleichmäßig bewegte Ladungen, sogenannte Ströme, diskutieren.
6.1
6.1.1
Elektrische Ströme
Der Stromdichtevektor
Zunächst betrachten wir die Kräfte, die auf bewegte Ladungen wirken. Die gesamte Kraft
resultiert dabei aus Dämpfung durch eine Art Reibung sowie durch das elektrische Feld.
Es gilt die Differentialgleichung
me (r̈ + γ ṙ) = −eE(r).
Die Forderung nach einem gleich bleibenden Strom besagt, dass r̈ = 0, also ergibt sich
ṙ = −
eE(r)
N e2
→ j := −N eṙ =
E(r) =: σ E(r)
me γ
me γ
(6.1)
mit der Teilchenzahldichte N , der Elementarladung e, der Elektronenmasse me (bzw.
der Masse andere Ladungsträger bei anderen Strömen), der Leitfähigkeit σ und einem
Dämpfungsfaktor γ. Der gesamte Strom in einem Leiter berechnet sich als das Integral
über die Stromdichte über dessen Querschnittsfläche. Für einen dünnen Leiter mit Querschnitt F und Länge l, in dem das Feld homogen verläuft, ist somit der Strom beschrieben
als
Z
Z
σF
U
∆φ
=
U =:
I=
df · j(r) = σ
df · E(r) = σ F
l
l
R
F
F
mit dem Ohmschen Widerstand R =
6.1.2
l
.
σF
Kontinuitätsgleichung
In jedem beliebigen Volumen gilt Q̇+I = 0, also folgt mit den zu diesen Größen gehörigen
Dichten
Z
Z
Z
dV ρ̇(r) +
df · j(r) =
dV [ρ̇(r) + div j(r)] = 0,
(V )
V
V
woraus folgt, dass der Integrand immer verschwinden muss und in jedem beliebigen Volumen gilt:
∂ρ(r, t)
+ div j(r, t) = 0.
(6.2)
∂t
6.1.3
Zusammenhang von Strom und Ladung in der Statik
Zunächst betrachten wir den statischen Fall, also ρ̇ = 0, womit auch div j = 0 gilt. Wir
wissen weiterhin, dass
ǫ0 ǫ(r)
D(r) = ǫ0 ǫ(r)E(r) =
j(r).
(6.3)
σ(r)
Für den Fall eines absolut homogenen Mediums, in dem ǫ und σ konstant sind, gilt also
ρext (r) = div D(r) =
THEORETISCHE PHYSIK C
ǫ0 ǫ
div j(r) = 0.
σ
45
6 MAGNETOSTATIK
46
Analog zu den bereits im Kapitel 5.2 für das D-Feld gezeigten Zusammenhängen folgt
bei verschwindender Zeitableitung der Raumladung eine Stetigkeit der Normalkomponente der Stromdichte an Grenzflächen. Wir betrachten nun den Übergang zwischen zwei
Teilräumen, in denen ǫ und σ jeweils konstant sind. Daraus folgt
Z
Z
Z
Z
ǫ(r)
ǫr
ǫl
df · j(r)
df · D(r) = ǫ0
df ηext = Qext =
df jn
= ǫ0
−
σ(r)
σr σl
(V )
(V )
F
F
und durch Vergleich der beiden Integrale ganz links und ganz rechts
ǫr
ǫl
ηext
jn
−
.
=
σr σl
ǫ0
6.2
(6.4)
Ampere’sches Gesetz
Ein stromdurchflossener Leiter hat natürlich auch eine Auswirkung auf einen anderen
solchen Leiter in seiner Nachbarschaft. Wir betrachten im Folgenden zwei unendlich dünne
ideale Leiter L1 und L2 , die jeweils durch Ortsvektoren s1 und s2 beschrieben werden und
durch die die Ströme I1 und I2 fließen. Die Kraft des Leiters 1 auf Leiter 2 berechnet sich
dann als
Z Z
I2 ds2 × (I1 ds1 × (s1 − s2 ))
µ0
.
(6.5)
F12 =
4π L1 L2
|s1 − s2 |3
Hierbei ist der Zusammenhang zu beachten, dass
1
1
µ0
1
· 2 =
· ǫ 0 µ0 =
.
4πǫ0 c
4πǫ0
4π
6.3
(6.6)
Biot-Savart-Gesetz
Eine einfachere Art, die Kraft einer Schleife 2 auf die andere Schleife 1 zu Formulieren,
ist das Magnetfeld. Man definiert
Z
I1 ds1 × B2 (s1 )
(6.7)
F21 =
L1
und dementsprechend dieses Feld als
µ0
B2 (s1 ) =
4π
Z
L2
I2 ds2 × (s1 − s2 )
.
|s1 − s2 |3
(6.8)
Hat man also nur einen einzelnen Leiter, so kann man das von diesem erzeugte magnetische
Feld an einem Ort r berechnen als
Z
ds × (r − s)
µ0
.
(6.9)
I
B(r) =
4π L |r − s|3
Als einfaches Beispiel dient das Feld einer ebenen ringförmigen Leiterschleife mit Radius
R. Das Feld dieser Anordnung im Ringmittelpunkt beträgt
B(0) =
THEORETISCHE PHYSIK C
µ0 I
n,
2R
(6.10)
46
6 MAGNETOSTATIK
47
wobei n der Normalenvektor der Ebene ist, in der die Schleife liegt. Das Vorzeichen dieses
Vektors muss dabei so gewählt werden, dass der Strom in der Schleife ihn in mathematisch
positiver Richtung umläuft.
Für kontinuierliche Stromverteilungen lässt sich das B-Feld auch schreiben als
Z
µ0
j(r′ ) × (r − r′ )
B(r) =
dV ′
(6.11)
4π V
|r − r′ |3
und die zugehörige Kraft auf einen anderen Strom j2 dementsprechend als
Z
F(r) =
dV [j2 (r) × B(r)] .
(6.12)
V
Die Kraft bzw. das Feld mehrerer Leiter berechnet sich als Superposition der einzelnen
Kräfte bzw. Felder.
6.4
Maxwellgleichungen
Zur Herleitung der beiden Maxwellgleichungen für das B-Feld sind zunächst zwei vektoralgebraische Zusammenhänge wichtig, welche im Grunde genommen aus Gleichung
2.16 hervorgehen. Sei hierzu A ein konstanter Vektor und u(r) ein Skalar, dann gilt:
rot [A u(r)] = grad u(r) × A
div [A u(r)] = grad u(r) · A.
Mit Hilfe dieser beiden Zusammenhänge lassen sich aus dem Biot-Savart-Gesetz und der
Annahme der Statik, also div j = 0, die folgenden beiden Gleichungen ableiten:
div B(r) = 0
rot B(r) = µ0 j(r).
(6.13)
(6.14)
Eine exakte Herleitung dieser Zusammenhänge findet sich im Skript auf den Seiten 120
und 121. Die eben gefundenen Zusammenhänge lassen sich natürlich mit Hilfe der Integralsätze von Gauß und Stokes auch in integraler Form fassen. Als solche geschrieben sind
die Gleichungen
Z
Z
dV div B(r) =
df · B(r) = 0
(6.15)
(V )
V
Z
Z
Z
df · j(r).
(6.16)
df · rot B(r) =
dr · B(r) = µ0
F
(F )
F
Ein Beispiel für die Anwendung dieser Formulierung der Maxwellgleichungen ist die Berechnung des B-Feldes für einen unendlich langen, gleichmäßig stromdurchflossenen Leiter
mit Radius R. In diesem Fall lassen sich Strom und Feld ausdrücken als
(
(
j0 · e z r < R
j0 · 2r r < R
.
(6.17)
j(r) =
⇒ B(r) = µ0 · eφ ·
I
r
≥
R
0
r≥R
2πr
Das Feld verhält sich also außerhalb des zylindrischen Leiters wie das eines unendlich
dünnen Drahtes.
THEORETISCHE PHYSIK C
47
6 MAGNETOSTATIK
6.5
48
Das Vektorpotential
Wie bereits zum elektrischen Feld kann man auch zum Magnetfeld ein Potential finden.
Dieses ist allerdings nun keine Skalare Größe, sondern vektoriell aufzufassen. Man definiert
B(r) = rot A(r).
(6.18)
Mit der zweiten Maxwellgleichung (Gleichung 6.13) findet man also
rot B(r) = rot rot A(r) = grad div A(r) − ∆A(r) = µ0 j(r).
Der Term grad div A(r) in dieser Formel ist äußerst unschön und wir versuchen, ihn
loszuwerden. In der Elektrostatik war das skalare Potential bezüglich einer Konstanten
unbestimmt. Also ist auch das Vektorpotential bezüglich einer Konstanten unbestimmt
und wir können diese so wählen, dass div A′ (r) = 0. Diese Eichung des Potentials bezeichnet man als Coulomb-Eichung. Damit das aus diesem Potential entstehende Feld
unverändert bleibt addieren wir als Konstante den Gradienten einer skalaren Funktion,
weil dieser bei der Bildung der Rotation verschwindet (siehe Gleichung 2.8).
A′ (r) = A(r) + grad f (r).
(6.19)
Daraus folgt, dass f die folgende Eigenschaft haben muss:
div A(r) = g(r)
⇒
div grad f (r) = ∆f (r) = −g(r).
(6.20)
Mit Hilfe dieser Eichung ergibt sich eine Poisson-Gleichung für das Vektorpotential:
− ∆A(r) = µ0 j(r) =
1
j(r).
ǫ0 c2
(6.21)
Diese lässt sich lösen wie auch die entsprechende Gleichung in der Elektrostatik, also mit
Hilfe einer Greenschen Funktion. Die Formel hierzu lautet wie folgt:
Z
Z
µ0
j(r′ )
′
′
′
dV Gm (r, r ) j(r ) =
A(r) =
dV ′
.
(6.22)
4π V
|r − r′ |
V
6.6
Multipolentwicklung
Wie bereits in der Elektrostatik im Kapitel 3.11 geschehen lässt sich nun auch eine Multipolentwicklung dieses Potentials durhführen. Der Untersteht besteht allein darin, dass
statt dem skalaren Potential je eine Komponente des Vektorpotentials, statt der Ladungsdichte je eine Komponente der Stromdiche verwendet wird.
φ(r) → Ai (r) , ρ(r) → ji (r) ,
µ0
1
→
.
4πǫ0
4π
Das Potential ergibt sich also aus
Ai (r) =
∞
µ0 X jki 1 ...kl
xk xk ...xkl
4π l=0 l! r2l+1 1 2
mit den Multipolmomenten der Stromverteilung
Z
4π
i
l
jk1 ...kl =
dV ′ j i (r′ ) (r′ )2l+1 Gm,k1 ,k2 ,...,kl (r′ )
(−1)
µ0
Z V
1
′ i ′
′ 2l+1
l
dV j (r ) (r )
.
= (−1)
r′ ,k1 ,k2 ,...,kl
V
THEORETISCHE PHYSIK C
(6.23)
(6.24)
(6.25)
48
6 MAGNETOSTATIK
49
Zu beachten ist hierbei, dass j i keinen Exponenten meint, sondern die i-te Komponente
der Stromdichte bzw. das Multipolmoment zur Berechnung der i-ten Komponente des
Vektorpotentials. Entsprechend schreibt sich diese Komponente des Potentials als
µ0 1 i
1 i
(6.26)
j + j xj + . . . .
Ai (r) =
4π r 0 r3 1j
Der erste dieser Terme beschreibt den magnetischen Monopol, der zweite den Dipol.
6.6.1
Moment 0. Ordnung
Wenden wir Gleichung 6.25 mit l = 0 an, so ergibt sich
Z
Z
′ i ′
′ 1 1
i
dV j (r ) (r ) ′ =
j0 =
dV ′ j i (r′ ) = 0.
r
V
V
Dass dieser Term verschwindet bedeutet anschaulich, dass es keine magnetischen Monopole gibt. Dies sieht man auch schon daran, dass es keine Quellen des magnetischen Feldes
gibt (div B = 0).
6.6.2
Moment 1. Ordnung
Analog zur eben erfolgen Rechnung ergibt sich
Z
Z
1
i
′ i ′
′ 3
=
dV ′ j i (r′ ) x′j .
j1j = −
dV j (r ) (r )
′
r ,j
V
V
Das zugehörige Potential ist also (alle drei Komponenten)
Z
µ0 1
AD (r) =
dV ′ j(r′ ) · (r · r′ ) .
3
4π r V
(6.27)
(6.28)
Dies lässt sich, unter anderem durch Verwendung von Gleichung 2.14, umformen zu
Z
µ0 r
1
AD (r) = −
dV ′ [r′ × j(r′ )] .
(6.29)
×
3
4π r
2 V
Wir definieren also das magnetische Dipolmoment wie folgt:
Z
µ0 m × r
1
.
dV ′ [r′ × j(r′ )] ⇒ AD (r) =
m :=
2 V
4π r3
(6.30)
Für eine ebene geschlossene Leiterschleife mit beliebiger Form und Fläche F beträgt dieses
Dipolmoment genau
m=I ·F=I ·F ·n
(6.31)
mit dem Normalenvektor n der Schleifenfläche. Das aus diesem Dipolpotential resultierende Feld hat einen sehr ähnlichen Aufbau wie bereits das elektrische Dipolfeld:
µ0
µ0 3r · (r · m) − m r2
m×r
=
BD (r) = rot AD (r) =
.
(6.32)
rot
4π
r3
4π
r5
THEORETISCHE PHYSIK C
49
6 MAGNETOSTATIK
6.7
50
Magnetisierung
Wir haben eben gezeigt, dass der einfachste magnetische Dipol aus einem Ringstrom
besteht. Betrachten wir das magnetische Feld nun in Materie besteht die Möglichkeit,
dass nicht nur der makroskopische Strom zu dessen Entstehend beiträgt, sondern auch
mögliche elementare Ringströme. In starker Analogie zum Vorgehen in Kapitel 5 definieren
wir auch hier eine Dichte molekularer Dipole:
X
Mmol (r) =
mi δ(r − ri ).
(6.33)
i
Weiterhin definieren wir räumlich gemittelte Größen der Art
Z
Z
1
1
dṼ Mmol (r + r̃) ; hAmol (r)i =
dṼ Amol (r + r̃)
M(r) =
∆V ∆V
∆V ∆V
und erhalten somit schließlich
µ0
hAmol (r)i =
4π
Z
dV
V
M(r′ ) × (r − r′ )
.
|r − r′ |3
(6.34)
Will man dieses Potential auf die bekannte Formel bringen, die durch das Poisson-Integral
definiert ist, so gilt
Z
j (r)
µ0
dV mol ′ ⇔ jmol (r) = rot M(r).
(6.35)
hAmol (r)i =
4π V
|r − r |
Die Umformung basiert auf
rot [A(r) · u(r)] = rot A(r) · u(r) + grad u(r) × A(r)
Z
Z
dV rot C(r) = −
C(r) × df
(V )
V
und benutzt, dass das durch die zweite Formel entstehende Oberflächenintegral verschwindet, wenn man das Integrationsvolumen größer als das betrachtete Medium wählt.
M(r′ ) × (r − r′ )
M(r′ )
1
1
′
′
.
= M(r ) × gradr′
=
rotr′ M(r ) − rotr′
|r − r′ |3
|r − r′ |
|r − r′ |
|r − r′ |
{z
}
|
verschwindet im Integral
Unter Einbeziehung der Magnetisierung verändern sich auch die bislang gefundenen Maxwellgleichungen. Man teilt hierzu den Strom auf in
jges (r) = jmakr (r) + jmol (r).
(6.36)
Setzt man den gefundenen Zusammenhang zwischen molekularem Strom und Magnetisierung ein, so folgt
rot B(r) = µ0 jges (r) = µ0 (jmakr (r) + jmol (r)) = µ0 (jmakr (r) + rot M(r))
und daraus schließlich
rot
1
B(r) − M(r) =: rot H(r) = jmakr (r).
µ0
THEORETISCHE PHYSIK C
(6.37)
50
6 MAGNETOSTATIK
51
mit dem neu eingeführten H-Feld. Für dieses gilt
B(r) = µ0 [H(r) + M(r)] .
(6.38)
Es ergeben sich also insgesamt die folgenden Gleichungen:
rot B(r) = µ0 jges (r) ; rot H(r) = jmakr (r) ; rot M(r) = jmol (r).
(6.39)
Weiterhin gilt auf Grund der Abwesenheit magnetischer Monopole
div B(r) = 0 ⇒ div H(r) = −div M(r).
(6.40)
Weiterhin lässt sich auch ein materialabhängiger direkter Zusammenhang zwischen M
und B formulieren, indem man die magnetische Permeabilität µ und Suszeptibilität χm
einführt:
1 χm
M(r) =
B(r).
(6.41)
µ0 1 + χ m
Auf diese Weise gilt für den Zusammenhang von H und B
1
1
χm
1
1
=
B(r) =:
B(r).
(6.42)
H = B(r) · 1 −
µ0
1 + χm
µ0 1 + χ m
µ0 µ
Für den Fall von Coulomb-Eichung des Potentials und räumlich konstanter Permeabilität
folgt daraus die Potentialgleichung
∆A(r) = −µ0 µ jmakr (r).
6.8
Übergangsbedingungen
Nach dem selben Schema wie bereits mehrfach geschehen lassen sich Bedingungen für
die Stetigkeit der Felder an Grenzflächen finden. So folgt aus div B(r) = 0, dass die
Normalkomponente des B-Feldes stetig ist. Weiterhin gilt
rot H(r) = jmakr (r) ⇒ Ht1 (r) − Ht2 (r) = [jmakr (r)]Obefläche ,
(6.43)
die Tangentialkomponente des H-Feldes verändert sich also um den Wert der Oberflächenströme. Da diese häufig 0 sind ist diese Komponente meist stetig.
6.9
Stromfreie Probleme
Wenn kein makroskopischer Strom vorhanden ist, dann gilt rot H(r) = 0. Dies ermöglicht
es uns, das Feld als Gradient eines skalaren Potentials zu schreiben. Wir definieren zunächst
H(r) = −grad φm (r)
und schließlich in Analogie zur Elektrostatik
div H(r) = −div M(r) = ρm (r).
Die gesamte hierbei postulierte magnetische Ladung errechnet sich entsprechend als
Z
df · M(r),
Qm = −
V
THEORETISCHE PHYSIK C
51
6 MAGNETOSTATIK
52
die zugehörige Poisson-Gleichung lautet
∆φm (r) = −ρm (r) = div M(r).
Das Potential kann also durch Integration errechnet werden, wie bereits aus der Elektrostatik bekannt ist. Es ergibt sich als
Z
Z
′
′
1
1
′ M(r )
′ divr′ M(r )
φm (r) = −
dV
dV
=
−
grad
.
r
4π V
|r − r′ |
4π
|r − r′ |
V
In Großer Entfernung gilt |r − r′ | ≈ r und somit lässt sich das Potential dort nähern als
Z
1
1
1 m·r
.
dV ′ M(r′ ) =
φm (r) = − gradr
4π
r V
4π r3
|
{z
}
=m
Eine beliebige Materieverteilung mit vorgegebener Magnetisierung erzeugt also ein Dipolfeld. Das dazu gehörige H-Feld lässt sich als negativer Gradient des Potentials berechnen.
An dieser Stelle ist ein Vergleich der äquivalenten Größen aus Elektro- und Magnetostatik
hilfreich. Wir haben Polarisationsladungen beschrieben als
ρpol (r) = −div P(r) und ηpol (r) = P(r) · en .
Weiterhin haben wir herausgefunden, dass die ”magnetische Ladung”berechenbar ist als
ρm (r) = −div M(r), also definieren wir analog ηm (r) = M(r) · en . Entsprechend ergibt
sich das magnetostatische Potential als
Z
Z
′
1
ηm (r′ )
1
′ ρm (r )
φm (r) =
dV
df
+
4π V
|r − r′ | 4π (V )
|r − r′ |
Z
Z
divr′ M(r′ )
1
en · M(r′ )
1
dV ′
+
df
.
= −
4π V
|r − r′ |
4π (V )
|r − r′ |
Im Falle einer quellfreien Magnetisierung (div M(r) = 0) verschwindet der erste Term.
Ein solcher Fall ist beispielsweise eine homogen magnetisierte Kugel. Da die Sachverhalte
zwischen magnetischen Feldern und Magnetisierung sich in starker Analogie zu elektrischen Feldern und Polarisation verhalten können wir hierbei auf das Beispiel einer homogen polarisierten Kugel zurückgreifen (siehe Kapitel 5.4.1). Entsprechend ist das Feld im
Innern
1
Hinnen (r) = − M(r)
3
und außerhalb das eines Dipols mit dem Dipolmoment m = V M (vergleiche Gleichung
6.32). In diesem Bereich sind die Felder B und H über den Faktor µ0 proportional zueinander. Die Magnetische Induktion B im Inneren ergibt sich jedoch als
2
B = µ0 (Hinnen + M) = µ0 M.
3
6.10
Feldenergie
Wir erinnern uns an die elektrische Energiedichte wel , die sich aus den Feldern D und E
berechnen lies. Analog zu dieser definieren wir die magnetische Energiedichte über
Z
Z
1
magn
dV w
(r) =
Wmag =
dV B(r) · H(r).
(6.44)
2 V
V
THEORETISCHE PHYSIK C
52
6 MAGNETOSTATIK
53
Dies lässt sich weiter umformen zu
Z
Z
1
1
2
dV B (r) =
dV B(r) · rot A(r)
W =
2µ0 µ V
2µ0 µ V
Z
Z
1
1
=
dV A(r) · rot B(r) +
dV div [A(r) × B(r)]
2µ0 µ V
2µ0 µ V
|
{z
}
verschwindet im Unendlichen
Z
Z
1
1
dV A(r) · rot H(r) =
dV A(r) · jmakr (r).
=
2 V
2 V
Setzt man an dieser Stelle für A das Poisson-Integral ein, also
Z
j(r′ )
µ0 µ
A(r) =
dV ′
,
4π V
|r − r′ |
so ergibt sich schließlich
µ0 µ
W =
8π
Z Z
V
dV dV ′
V
jmakr (r′ ) · jmakr (r)
.
|r − r′ |
(6.45)
Im Falle diskreter Stromverteilungen lässt sich diese Energie auch anders ausdrücken. Das
Volumenintegral über die Stromdichte wird dann zu einem Wegintegral über Leiter.
X
jmakr (r) dV →
Ii dsi .
i
Die Energie schreibt sich also als
µ0 µ X X
W =
8π i k
Z Z
Li
Lk
1X
Ii Ik
dsk dsi =:
Lik Ii Ik
|si − sk |
2 i,k
(6.46)
mit den Induktionskoeffizienten
µ0 µ
Lik =
4π
Z Z
Li
Lk
dsk dsi
= Lki .
|si − sk |
Eine weitere mögliche Darstellung ist
Z
Z
1X
1X
1
dV A(r) · jmakr (r) =
I k Φk
Ik dsk · A(sk ) =:
W =
2 V
2 k Lk
2 k
mit dem magnetischen Fluss der Leiterschleife k, welcher definiert ist als
Z
Z
Z
dfk · B(rk ).
dfk · rot A(rk ) =
dsk · A(sk ) =
Φk =
Fk
Lk
(6.47)
(6.48)
(6.49)
Fk
Hierbei ist Fk die vom Leiter Lk eingeschlossene Fläche. Weiterhin findet man noch einen
Zusammenhang zwischen Induktion und magnetischem Fluss:
W =
X
1X
1X
Lik Ii Ik =
I k Φ k ⇒ Φk =
Lik Ii .
2 i,k
2 k
i
THEORETISCHE PHYSIK C
(6.50)
53
6 MAGNETOSTATIK
6.11
54
Kraft auf Stromverteilung im äußeren Magnetfeld
Ein Strom erfährt im Magnetfeld eine ablenkende Kraft. Um diese zu bestimmen wird
eine räumlich sehr kleine Stromverteilung angenommen, also j(r + r̃) mit sehr kleinen
r̃. Die selbe Annahme wird auch für das äußere Feld getroffen, man spricht also von
einer annähernd homogenen Strom- und Feldverteilung um den Ort r. Die ermöglicht es,
B bis zur ersten Ordnung um r̃ = 0 zu entwickeln. Setzt man diese in die Formel der
Lorentz-Kraftdichte ein, schreibt also
f(r + r̃) = j(r + r̃) × Ba (r + r̃)
Ba (r + r̃) = Ba (r) + (r̃ · gradr̃ )Ba (r + r̃)|r
und integriert schließlich über das Volumen, um die gesamte Kraft zu erhalten, so ergibt
sich nach einigen Umformungen (siehe Skript Seite 138) die Formel
F(r) = (mr · gradr )Ba (r) = grad [mr · Ba (r)] .
(6.51)
mr ist hierbei das Dipolmoment der betrachteten Stromanordnung. Aus dieser Kraft lässt
sich wiederum die Energie berechnen, da immer F(r) = −grad r W . Entsprechend ist also
W = −mr · Ba (r).
(6.52)
Das Drehmoment auf eine solche Stromverteilung ist gegeben durch
Mr = mr × Ba (r).
6.12
(6.53)
Magnetischer Spannungstensor
Basierend auf der Formel für die Lorentz-Kraftdichte
f(r) = ρext (r) · E(r) + jmakr (r) × B(r)
{z
} |
{z
}
|
(6.54)
Tikmagn = (Bi Hk ) − δik wmagn .
(6.55)
elektrischer Anteil
magnetischer Anteil
suchen wir nach einem Tensor, der den magnetischen Anteil dieser Kraftdichte beschreibt,
so wie der elektrische Spannungstensor den elektrischen Anteil ausdrückt. Ein solcher
Tensor ist in starker Analogie zum bereits bekannten elektrischen Fall gegeben durch
Mit diesem Tensor lässt sich die i-te Komponente der Kraftdichte berechnen als
magn
fi = Tik,k
,
(6.56)
was in vektorieller Form folgendermaßen geschrieben werden kann:
f(r) = div T magn (r).
THEORETISCHE PHYSIK C
(6.57)
54
7 INDUKTIONSGESETZ - LANGSAM VERÄNDERLICHE FELDER
7
55
Induktionsgesetz - langsam veränderliche Felder
Bislang haben wir nur statische Felder betrachtet, also solche, die sich nur im Raum, nicht
aber in der Zeit verändern. Im folgenden wollen wir diese weiter Möglichkeit berücksichtigen.
Zunächst betrachten wir hierzu allerdings nur langsam veränderliche Felder, die nicht
selbst abstrahlen. Ein Beispiel dafür ist Wechselstrom, welcher mit einer recht kleinen
Frequenz von 50 Hz oszilliert.
7.1
Faraday’sches Gesetz
Durch derartige veränderliche Felder werden in Leiterschleifen Ströme induziert. Experimentell lässt sich ein Zusammenhang dieser Ströme bzw. der Spannung, die sie antreibt,
und dem in Kapitel 6.10 definierten magnetischen Fluss finden. Es gibt also einen Zusammenhang der Art
Z
Z
d
d
E(r, t) · dr = − Φ = −
Uind =
B(r, t) · df,
(7.1)
dt
dt F
(F )
wobei F die vom Leiter eingeschlossene Fläche ist. Hat man also eine Schleife, die an einer
Stelle unterbrochen ist (z. B. durch eine Batterie), so ergibt sich die induzierte Spannung
als Wegintegral über den verbleibenden Leiterteil (F )′ plus dem Integral über die Lücke,
welches genau der negativen extern angelegten Spannung entspricht. Es gilt dann
Z
Uind =
E(r, t) · dr − Uext .
(F )′
Im Falle eines idealen Leiters verschwindet das elektrische Feld und es ist Uind = −Uext .
Wenn mehrere Leiter in unmittelbarer Nachbarschaft zueinander angeordnet sind beeinflussen sie sich gegenseitig. In diesem Fall folgt
Φi =
X
k
Lik Ik ⇒ Uiind = −
d X
Lik Ik .
dt k
(7.2)
Aus Gleichung 7.1 lässt sich weiterhin auch eine Modifikation der 2. Maxwellgleichung
ablesen. Verwendet man den Satz von Gauß, um das Wegintegral über das E-Feld auch
in ein Flächenintegral umzuwandeln, dann folgt
rot E(r, t) = −
∂B(r, t)
.
∂t
(7.3)
Diese Gleichung lässt sich auch umschreiben mit Hilfe des Vektorpotentials. In dieser weiteren Schreibweise erkennt man, dass das E-Feld in der Dynamik nicht mehr ausschließlich
vom skalaren Potential φ abhängt.
∂A(r, t)
∂A(r, t)
= 0 ⇒ E(r, t) +
rot E(r, t) +
= −grad φ(r, t).
∂t
∂t
Aus diesem Zusammenhang folgt also die Darstellung des elektrischen Feldes als
E(r, t) = −grad φ(r, t) −
THEORETISCHE PHYSIK C
∂A(r, t)
.
∂t
(7.4)
55
7 INDUKTIONSGESETZ - LANGSAM VERÄNDERLICHE FELDER
56
Man erhält also die Potentialgleichungen
−ǫ0 div
∂A(r, t)
− ǫ0 ∆φ(r, t) = ρ(r, t) und rot rot A(r, t) = µ0 j(r, t),
∂t
(7.5)
welche sich unter Verwendung von Coulomb-Eichung vereinfachen lassen zu
−ǫ0 ∆φ(r, t) = ρ(r, t) und
−
1
∆A(r, t) = j(r, t).
µ0
(7.6)
Unter dieser Eichung berechnen sich die Potentiale mittels Greenscher Funktionen, also
Z
Z
1
ρ(r, t)
′
′
dV Ge (r, r )ρ(r, t) =
φ(r, t) =
dV ′
(7.7)
4πǫ0 V
|r − r′ |
V
Z
Z
µ0
j(r, t)
′
′
dV Gm (r, r )j(r, t) =
dV ′
.
(7.8)
A(r, t) =
4π V
|r − r′ |
V
All diese Zusammenhänge gelten allerdings zunächst nur für langsam veränderliche Felder.
In der vierten Maxwellgleichung gibt es einen zusätzlichen Term für den Fall, dass sich das
| ≪ |j|. Die Existenz
D-Feld sehr schnell ändert. Dieser verschwindet allerdings für | ∂D
∂t
dieses zusätzlichen Terms wird schnell ersichtlich, wenn man bedenkt, dass div rot H nach
Gleichung 2.9 immer verschwindet. Dementsprechend wäre auch div j immer Null. Damit
die Kontinuitätsgleichung (siehe Kapitel 6.1.2) erfüllt ist, muss also gelten
div rot H(r, t) = 0 = div jmakr (r, t) +
∂ρext (r, t)
∂D(r, t)
= div jmakr (r, t) + div
∂t
∂t
und somit lautet die tatsächliche 4. Maxwellgleichung
rot H(r, t) = jmakr (r, t) +
∂D(r, t)
.
∂t
(7.9)
Wir suchen nun allerdings den Bereich, in dem wir den Zusatzterm vernachlässigen
können. Hierzu machen wir den Ansatz D = D̄ e−iωt , sodass der Betrag der Ableitung
= |ω D̄| . Mit dem Ohm’schen Gesetzt folgt
sich schreiben lässt als ∂D
∂t
j = σE ⇒ j =
und damit schließlich
σ
D
ǫ0 ǫ
∂D ωǫ0 ǫ
≪ 1.
∂t = |ω D̄| ≪ |j| ⇒
σ
Im Falle hoher Leitfähigkeit und geringer Frequenz und Dielektrizität kann der Zusatzterm
also weggelassen werden. Durch die Kontinuitätsgleichung wird weiterhin eine Differentialgleichung für die Ladung definiert:
σ
σ
∂ρ
= −div j = − div D = − ρ.
∂t
ǫ0 ǫ
ǫ0 ǫ
(7.10)
t
Die Lösung dieser Gleichung ist gegeben durch ρ = ρ0 e− τ mit der Dämpfung τ = ǫσ0 ǫ .
Da diese Zahl in üblichen Leitern sehr klein ist (z.B. τKupfer ≈ 10−17 s) kann man also in
der Elektrotechnik von div j = 0 ausgehen, weil jede existente Ladung sehr schnell wieder
abgeflossen ist.
THEORETISCHE PHYSIK C
56
7 INDUKTIONSGESETZ - LANGSAM VERÄNDERLICHE FELDER
7.2
7.2.1
57
Wechselstromtechnik
Kirchhoff ’sche Regeln
Die bislang diskutierten Zusammenhänge lassen sich gut auf den Spezialfall dünner idealer
Leiter anwenden, woraus zwei für die Elektrotechnik elementare Regeln entstehen. Die
Knotenregel besagt, dass die Summe aller in einen Leiterknoten hinein und aus diesem
heraus fließenden Knoten Null ergibt. Dies ist einleuchtend, da wir bereits gezeigt haben,
dass Ströme in idealen Leitern keine Quellen haben. Mathematisch ergibt sich dieser
Zusammenhang aus
Z
Z
XZ
X
df · j(r, t) =
dfk · jk (r, t) =
dV div j(r, t) =
Ik = 0.
(7.11)
0=
(V )
V
k
Fk
k
Herein- und herausfließene Ströme haben dabei gegensätzliche Vorzeichen.
Eine weitere Regel besteht in der Maschenregel, welche besagt, dass die Spannungsabfälle in einer Masche (=
b geschlossener Stromkreis) gleich den treibenden Spannungen
in dieser sind. Mathematisch lässt sich diese fassen mit Hilfe der Induktionsspannung in
einem Stromkreis k:
Z
dr · E(r, t) = Ukind .
(7.12)
Lk
Wir betrachten wieder den Fall, dass ein Teil des Leiters, genannt L′′k , ersetzt ist durch
eine äußere Spannungsquelle. Das Feld in diesem Teil des Kreises ist entsprechend dem
im restlichen Leiter L′k entgegengerichtet und es ergibt sich
Z
(7.13)
dr · E(r, t) − Ukind = Ukext .
L′k
Die hierbei auftauchende Induktionsspannung kann mit Hilfe von Gleichung 7.2 aus den
Strömen und Induktionskoeffizienten berechnet werden.
7.2.2
Einfacher elektrischer Schwingkreis
Ein Beispiel für die Anwendung der eben formulierten Regeln sind elektrische Schwingkreise. Diese sollen anhand eines LRC-Kreises veranschaulicht werden. In diesem sind eine
Spule (Induktivität L), ein Kondensator (Kapazität C) und ein Widerstand R (vergleiche Kapitel 6.1.1) in Reihe verbaut. Die Knotenregel besagt, dass der Strom in dieser
Anordnung überall der selbe ist. Mit Hilfe der Maschenregel folgt
Z
Z
∂I(t)
= U ext (t).
dr · E(r, t) + dr · E(r, t) +L
∂t
} | C {z
}
| R {z
=R·I(t)
Durch Ableiten und Ersetzen von
=
∂Q
∂t
Q(t)
C
= I folgt schließlich die Differentialgleichung
∂ 2 I(t)
∂I(t) I(t)
∂U ext (t)
+
R
·
+
=
.
∂t2
∂t
C
∂t
Dies ist die Gleichung eines gedämpften harmonischen Oszillators. Zunächst betrachten
wir den Fall einer freien Schwingung, also U ext (t) = 0. In diesem Fall wird die Gleichung
gelöst durch
t
A, B ∈ R.
I(t) = e− τ · A eiΩt + B e−iΩt
L·
THEORETISCHE PHYSIK C
57
7 INDUKTIONSGESETZ - LANGSAM VERÄNDERLICHE FELDER
q
Hierbei tauchen die Größen Ω = ω02 − τ12 , die Dämpfung τ =
q
1
auf. Man unterscheidet nun 3 Fälle:
quenz ω0 = LC
2L
R
58
und die Resonanzfre-
• Ist Ω ∈ R \ {0}, so handelt es sich um eine gedämpfte Schwingung.
• Ist hingegen Ω ∈ C \ R, so spricht man vom Kriechfall, eine Dämpfung ist derart
schnell, dass keine Schwingung zu Stande kommen kann.
• Im aperiodischen Grenzfall Ω = 0 ergibt sich ein exponentieller Abfall der Auslenkung.
Für den Fall einer zeitlich harmonischen externen Spannung
U ext (t) = ℜ(U0 eiωt ) mit U0 = |U0 |eiΦU
und einen ebenso zeitlich harmonischen Strom
I(t) = ℜ(I0 eiωt ) mit I0 = |I0 |eiΦI
ergibt sich somit durch Kürzen von eiωt die Differentialgleichung
1
2
−Lω + iωR +
I0 = iωU0 .
C
Das Verhältnis R̃ = UI00 bezeichnet man als Scheinwiderstand, es ist eine komplexe Größe,
also R̃ = |R̃|eiδ . Ihren Imagimärteil bezeichnet man auch als Blindwiderstand. Auf der
Basis dieser Gleichung lassen sich Wirkwiderstände, sogenannte Impedanzen, für die einzelnen Bauteile definieren. Die Summe dieser Impedanzen (bei Parallelschaltungen die
reziproke Summe) ergibt dann den Scheinwiderstand.
RC =
1
1
= −i
iωC
ωC
;
RL = iωL.
Weiterhin gilt, dass |I0 ||R̃| = |U0 | und
∆Φ := ΦU − ΦI = δ = arctan
ωL −
R
1
ωC
.
Dementsprechend gibt es auch hier 3 Fälle zu unterscheiden:
• δ > 0 ⇔ ωL >
1
ωC
⇔ ω 2 > ω02 : Der Strom hinkt der Spannung hinterher.
• δ = 0 ⇔ ωL =
1
ωC
⇔ ω 2 = ω02 : Strom und Spannung sind in Phase.
• δ < 0 ⇔ ωL <
1
ωC
⇔ ω 2 < ω02 : Der Strom ist der Spannung voraus.
Zu guter Letzt kann man auch die Leistung an einem solchen Schwingkreis berechnen.
Diese ist definiert als
N (t) = U ext (t) I(t) = ℜ(U0 eiωt ) ℜ(I0 eiωt ).
Das zeitliche Mittel dieser realen Leistung errechnet sich als
Z ∆t
2
1
1
N̄W =
dτ N (τ ) = |U0 ||I0 | cos ∆Φ.
∆t − ∆t
2
2
THEORETISCHE PHYSIK C
58
7 INDUKTIONSGESETZ - LANGSAM VERÄNDERLICHE FELDER
59
Diese Leistung wird auch als Wirkleistung bezeichnet und am Widerstand verbraucht, der
entsprechende Imaginärteil
1
N̄B = |U0 ||I0 | sin ∆Φ
2
nennt sich Blindleistung (verbraucht an der Spule und am Kondensator). Zur Vereinfachung der Darstellung definiert man weiterhin die Effektivwerte von Spannung und Strom
als
|U0 |
|I0 |
Ueff = √
und Ieff = √ .
2
2
Auch der gesamte Energiehaushalt des Schaltkreises lässt sich gut darstellen. Hierzu integriert man die Differentialgleichung des Schwingkreises nach der Zeit, sodass sie eine
Gleichung von Q statt von I wird, und multipliziert auf beiden Seiten mit I. Was sich
dabei ergibt ist folgendes:
L
∂Q(t) ∂Q(t) Q(t) ∂Q(t)
∂Q(t)
∂ 2 Q(t) ∂Q(t)
+R
+
= U ext (t)
2
∂t
∂t
∂t
∂t !
C
∂t
∂t
2
2 2
d L ∂Q(t)
∂Q(t)
∂Q(t)
d Q (t)
= −R
+ U ext (t)
+
dt 2
∂t
dt 2C
∂t
∂t
1
d L 2
d
I (t) +
CU 2 (t)
=
−R I 2 (t) + U ext (t) I(t) .
|
{z }
| {z }
dt 2
dt
2
| {z }
|
{z
}
Joule’sche Wärme
Quellenleistung
Spulenenergie
Kondensatorenergie
Die Leistung der Quelle wird also teilweise in Wärme umgewandelt und erhöht zu anderen
Teilen die magnetische Energie der Spule und die elektrische Energie des Kondensators.
THEORETISCHE PHYSIK C
59
8 DAS VOLLSTÄNDIGE SYSTEM DER MAXWELLGLEICHUNGEN
8
61
Das Vollständige System der Maxwellgleichungen
Wir kennen mittlerweile die Maxwellgleichungen im Vakuum und in Medien. Da im Vakuum keinerlei Polarisationsladungen und molekularen Ströme bestehen und die Felder
D und H ich einfach durch E und B ausdrücken lassen haben erstere die einfache Form
ǫ0 div E(r, t)
div B(r, t)
∂B(r, t)
rot E(r, t) +
∂t
1 ∂E(r, t)
rot B(r, t) − 2
c
∂t
Weiterhin gilt die Kontinuitätsgleichung:
= ρges (r, t)
= 0
(8.1)
(8.2)
= 0
(8.3)
= µ0 jges (r, t).
(8.4)
∂ρges (r, t)
+ div jges (r, t) = 0.
(8.5)
∂t
Innerhalb von Medien verhalten sich diese Zusammenhänge etwas komplizierter. Wir wissen bereits, dass
ρges (r, t) = ρext (r, t) + ρpol (r, t)
| {z } | {z }
| {z }
div D(r,t)
ǫ0 div E(r,t)
j (r, t)
|ges{z }
1
µ0
rot B(r,t)
−div P(r,t)
= jmakr (r, t) + jmol (r, t) +jpol (r, t)
| {z } | {z }
rot H(r,t)
(8.6)
(8.7)
rot M(r,t)
wobei letzterer der Strom ist, der entsteht, wenn Polarisationsladungen sich bewegen und
die mit geschweiften Klammern zu Gleichung 8.7 hinzugefügten Zusammenhänge nur in
der Statik gelten, in der der Polarisationsstrom nicht existiert. Die Kontinuitätsgleichung
in Medien lässt sich auf zwei Weisen formulieren, es gilt
∂ρges (r, t)
+ div jges (r, t) = 0
∂t
(8.8)
und ebenso
∂ρext (r, t)
+ div jmakr (r, t) = 0.
(8.9)
∂t
Die zweite Variante entsteht, wenn man Gleichungen 8.6 und 8.7 in 8.8 einsetzt und
verwendet, dass
∂P(r, t)
.
(8.10)
jpol (r, t) =
∂t
Auf diese Weise ergeben sich mit den Hilfsfeldern
D(r, t) = ǫ0 E(r, t) + P(r, t) und H(r, t) =
1
B(r, t) − M(r, t)
µ0
(8.11)
die Maxwellgleichungen in Medien:
div D(r, t)
div B(r, t)
∂B(r, t)
rot E(r, t) +
∂t
∂D(r, t)
rot H(r, t) −
∂t
THEORETISCHE PHYSIK C
= ρext (r, t)
= 0
(8.12)
(8.13)
= 0
(8.14)
= jmakr (r, t).
(8.15)
61
8 DAS VOLLSTÄNDIGE SYSTEM DER MAXWELLGLEICHUNGEN
8.1
62
Materialgleichungen
Wir wissen bereits, dass sich die elektrischen und magnetischen Felder gegenseitig beeinflussen. Aufgrund dieses Effekts ist es auch naheliegend, dass Magnetisierung und Polarisation nicht nur einseitig durch B oder E erzeugt werden. Ein solcher überkreuzender
Einfluss ist in diesem Bereich allerdings erst bei wirklich hohen Leistungen und Frequenzen
zu erwarten, weshalb dies nicht Diskussionsthema der Vorlesung wurde. Wir betrachten
außerdem nur lineare Antworten des Materials. Im Falle nichtlinearer Reaktionen müssten
wir mit einer unendlichen Summe aus immer höher dimensionalen Tensoren für χ rechnen,
es wäre beispielsweise die (statische) Polarisation gegeben durch
Pi (r) =
3
X
j,k,... =1
8.1.1
i
h
(1)
(2)
ǫ0 χe ij Ej (r) + χe ijk Ej (r)Ek (r) + . . . .
Statik
Wir wollen uns also zur Vereinfachung beschränken auf die bereits bekannten Zusammenhänge
P(r) = ǫ0 χe (r)E(r) , M(r) =
χm (r)
B(r) und j(r) = σ(r)E(r).
1 + χm (r)
(8.16)
Die Hilfsfelder ergeben sich wie bekannt als
1
B(r)
µ0 µ(r)
(8.17)
ǫ(r) = 1 + χe (r) und µ(r) = 1 + χm (r).
(8.18)
D(r) = ǫ0 ǫ(r)E(r) und H(r) =
mit den Faktoren
In Anisotropen Medien wie Kristallen muss mit einem (weiterhin linearen) tensoriellen
Zusammenhang gerechnet werden:
Pi (r) =
3
X
ǫ0 χe ij Ej (r).
(8.19)
j=1
Die Suszeptibilität χe ist also eine 3 × 3-Matrix, weshalb in diesen Medien E, P und D
nicht mehr zwangsläufig parallel stehen. Selbiges gilt analog auch für B, M und H.
8.1.2
Dynamik
In dynamischen Fällen ist der Zusammenhang etwas komplizierter. Die Ausrichtung elementarer Dipole ist nicht nur vom Feld zum gegenwärtigen Zeitpunkt abhängig, sondern
auch von den Feldzuständen davor. Entsprechend muss für die Polarisation ein Faltungsintegral des elektrischen Feldes mit einer materialspezifischen Response-Funktion berechnet
werden. Es ergibt sich also
Z ∞
dt′ R(r, t′ ) E(r, t − t′ ).
(8.20)
P(r, t) = ǫ0
0
Das Faltungsintegral hat seine untere Grenze bei 0, weil logischerweise nur ein Feld vor
dem gegenwärtigen Zeitpunkt eine Auswirkung auf den Zustand gehabt haben kann, ein
THEORETISCHE PHYSIK C
62
8 DAS VOLLSTÄNDIGE SYSTEM DER MAXWELLGLEICHUNGEN
63
zukünftiges nicht. Alternativ kann man als untere Grenze auch −∞ wählen uns voraussetzen, dass die Response-Funktion für negative Argumente verschwindet. Um eine
Konvergenz dieses Integrals zu erreichen fordern wir fürderhin, dass für das Feld auch in
der Zeit und Frequenz natürliche Randbedingungen gelten, dass also
lim E(r, t) = 0 und
t→±∞
lim Ē(r, ω) = 0.
ω→±∞
Unter diesen Bedingungen lässt sich die Faltung auch einfacher darstellen, wenn man
sie im Fourierraum betrachtet. Hierbei sei daran erinnert, dass es in der Physik üblich
ist, das Vorzeichen vor einem iωt-Term im Exponenten zu invertieren im Gegensatz zur
üblichen Transformation, wir sie bei Raumkoordinaten angewendet wird. Weiterhin wird
1
der Normierungsfaktor 2π
vor der Hintransformation platziert. Genaueres zur Fouriertransformation allgemein sowie zur speziellen in der Vorlesung verwendeten Form findet
sich im Kapitel 2.6. Wir definieren also die Fourier-Felder
Z ∞
Z ∞
1
iωt
dω Ē(r, ω) e−iωt
dt E(r, t) e
↔ E(r, t) =
Ē(r, ω) =
2π −∞
−∞
und entsprechend die Polarisation. Aus einem Vergleich der beiden möglichen Darstellungen für letztere ergibt sich eine Art der Berechenbarkeit für die bislang unbekannte
Response-Funktion:
Z ∞
dω P̄(r, ω) e−iωt
P(r, t) =
−∞
Z ∞
= ǫ0
dt′ R(r, t′ ) E(r, t − t′ )
Z−∞
Z ∞
∞
′
′
′
dω Ē(r, ω) e−iω(t−t )
dt R(r, t )
= ǫ0
Z ∞ −∞
Z ∞−∞
′
′
iωt′
dt R(r, t ) e
dω ǫ0
=
Ē(r, ω) e−iωt .
−∞
−∞
|
{z
}
=P̄(r,ω)
Man definiert also die transformierte Polarisation als
P̄(r, ω) = ǫ0 χe (r, ω)Ē(r, ω) mit χe (r, ω) =
Z
∞
dt′ R(r, t′ ) eiωt
′
(8.21)
−∞
als sogenannte Suszeptibilitätsfunktion, die sich als (2π-fache) Fouriertransformation der
Response-Funktion berechnet. Weiterhin definiert man darauf aufbauend auch die Dielektrizitätsfunktion
ǫ(r, ω) = 1 + χe (r, ω).
(8.22)
Ein einfaches Beispiel der Anwendung dieser Methode sind stationäre Felder, also solche,
die mit einer festen Frequenz ω0 oszillieren. Diese lassen sich ausdrücken als
1
E0 (r)e−iω0 t + E0∗ (r)eiω0 t
E(r, t) = ℜ E0 (r)e−iω0 t =
2
und ihre Transformierte hat dementsprechend die Form
Ē(r, ω) =
1
[E0 (r)δ(ω − ω0 ) + E0∗ (r)δ(ω + ω0 )] .
2π
THEORETISCHE PHYSIK C
(8.23)
63
8 DAS VOLLSTÄNDIGE SYSTEM DER MAXWELLGLEICHUNGEN
64
Mit Hilfe von Gleichung 8.21 lässt sich damit die Polarisation im Frequenzraum und durch
anschließende Rücktransformation im normalen Raum ausrechnen. Bei der Berechnung
derer verwendet man, dass χe (r, ω0 ) ∗ = χe (r, −ω0 ), was sich anhand der Definition von
χe in Gleichung 8.21 zeigen lässt. Es folgt somit
P(r, t) =
1
1
ǫ0 χe (r, ω0 )E0 (r)e−iω0 t + ǫ0 χe (r, ω0 ) ∗ E0∗ (r)eiω0 t
2
2
= ℜ ǫ0 χe (r, ω0 )E0 (r) e−iω0 t =: ℜ P0 (r)e−iω0 t .
{z
}
|
(8.24)
(8.25)
:=P0 (r)
8.2
Maxwellgleichungen im Fourierraum
Wir haben bereits im Kapitel 2.6 gezeigt, dass eine Ableitung nach der Zeit im Fourierraum zum Vorfaktor −iω wird. Dies können wir nun auf die Maxwellgleichungen anwenden. Alle verbleibenden Terme werden trivialerweise in die fourier-konjugierten Größen
umgeformt. Eine Weitere spezielle Trennung, die hierbei nützlich ist, ist die Aufspaltung
des makroskopischen Stromes in einen Konduktionsstrom und einen Konvektionsstrom.
Während ersterer von vorhandenen externen Ladungen unabhängig ist definiert sich letzterer durch deren Bewegung, also als jconv (r, t) = ρext (r, t) · v. Ersterer hingegen entsteht
durch das Feld als jcond (r, t) = σ(r, t) · E(r, t). Durch diese Unterscheidung lässt sich die
vierte Maxwellgleichung umschreiben zu
rot H̄(r, ω) = −iω D̄(r, ω) + j̄cond (r, ω) + j̄conv (r, ω)
= (−iωǫ0 ǫ(r, ω) + σ(r, ω)) Ē(r, ω) + j̄conv (r, ω)
= −iωǫ0 ǫ̂(r, ω) Ē(r, ω) + j̄conv (r, ω)
mit der verallgemeinerten dielektrischen Funktion
ǫ̂(r, ω) = ǫ(r, ω) + i
σ(r, ω)
.
ωǫ0
(8.26)
Dies ist die eigentliche observable Größe, da bei der Beschreibung der Materialantwort
keine eindeutige Unterscheidung zwischen dielektrisch (ǫ) und metallisch (σ) getroffen
werden kann. Die Maxwellgleichungen für die fouriertransformierten Felder Ē(r, ω) und
H̄(r, ω) außerhalb magnetisch aktiver Medien (µ = 1) lauten also
ǫ0 div ǫ(r, ω)Ē(r, ω) = ρ̄ext (r, ω)
(8.27)
div H̄(r, ω) = 0
(8.28)
rot Ē(r, ω) = iωµ0 H̄(r, ω)
(8.29)
rot H̄(r, ω) = j̄conv (r, ω) − iωǫ0 ǫ̂(r, ω) Ē(r, ω).
(8.30)
8.3
Übergangsbedingungen
Wir wissen bereits aus dem gewöhnlichen Raum, dass
D2n (r, t) − D1n (r, t) = ηext (r, t) und B2n (r, t) − B1n (r, t) = 0.
(8.31)
Im Falle einer verschwindenden Oberflächenladung kann aus ersterem Zusammenhang
auch
ǫ1 (r, ω)Ē1n (r, ω) = ǫ2 (r, ω)Ē2n (r, ω)
(8.32)
THEORETISCHE PHYSIK C
64
8 DAS VOLLSTÄNDIGE SYSTEM DER MAXWELLGLEICHUNGEN
65
gefolgert werden. Weiterhin wissen wir von der Stetigkeit der Tangentialkomponente des
elektrischen Feldes:
E1t (r, t) = E2t (r, t) → Ē1t (r, ω) = Ē2t (r, ω).
(8.33)
Und zu guter Letzt bleibt sich die Übergangsbedingung für H im Fourierraum unverändert,
zumal die in
Ht1 (r) − Ht2 (r) = [jmakr (r)]Obefläche
(8.34)
auftauchenden Oberflächenströme ohnehin meist 0 sind. In Abwesenheit von Oberflächenladungen
und -strömen sind also im gewöhnlichen und im Fourierraum die Normalkomponenten von
B und D sowie die Tangentialkomponenten von E und H stetig.
8.4
Eichtransformationen
Wir wissen bereits, dass wir unsere Potentiale auf gewisse weise verändern können, ohne
dass sich das von ihnen erzeugte Feld ändert. Weiterhin wissen wir, auf welche Weise man
das Vektorpotential modifizieren kann. Gesucht ist also die entsprechende Eichung für das
skalare elektrostatische Potential, sodass sich weiterhin das selbe E-Feld ergibt. Diese ist
mit der selben skalaren Funktion f (r, t) gegeben durch
A′ (r, t) = A(r, t) + grad f (r, t) und φ′ (r, t) = φ(r, t) −
∂f (r, t)
,
∂t
(8.35)
weil auf diese Weise gilt, dass
E(r, t) = −
8.5
∂A(r, t)
∂A′ (r, t)
− grad φ′ (r, t) = −
− grad φ(r, t).
∂t
∂t
Inhomogene Wellengleichung im Vakuum
Wir gehen von der ersten und vierten Maxwellgleichung im Vakuum aus und schreiben sie
so um, dass sie nur noch von den Potentialen abhängen. Dann haben sie folgende Form:
2
1
∂ A(r, t)
∂
rot rot A(r, t) = µ0 jmakr (r, t) + 2 −
− grad φ(r, t)
(8.36)
c
∂t2
∂t
∂A(r, t)
− grad φ(r, t) .
(8.37)
ρext (r, t) = ǫ0 div −
∂t
Durch Umstellen dieser Gleichungen (mit Hilfe von Gleichung 2.12) ergibt sich
1 ∂φ(r, t)
1 ∂2
= −µ0 jmakr (r, t) (8.38)
∆ − 2 2 A(r, t) − grad div A(r, t) + 2
c ∂t
c
∂t
∂
ρext (r, t)
∆φ(r, t) + div A(r, t) = −
. (8.39)
∂t
ǫ0
Diese Gleichungen beinhalten nun allerdings beide jeweils beide Potentiale, sind also untereinander gekoppelt. Die Lösung, um dies zu vermeiden, ist eine passende Eichung.
THEORETISCHE PHYSIK C
65
8 DAS VOLLSTÄNDIGE SYSTEM DER MAXWELLGLEICHUNGEN
8.6
66
Lorenz-Eichung
Man eicht die Potentiale mit Hilfe der skalaren Funktion f so, dass
div A(r, t) +
1 ∂φ(r, t)
= 0.
c2 ∂t
(8.40)
Auf diese Weise ergeben sich zwei entkoppelte Gleichungen:
1 ∂2
∆ − 2 2 A(r, t) =: A(r, t) = −µ0 jmakr (r, t)
(8.41)
c ∂t
1 ∂2
ρext (r, t)
∆ − 2 2 φ(r, t) =: φ(r, t) = −
(8.42)
c ∂t
ǫ0
∂2
mit dem D’Alembert-Operator = ∆ − c12 ∂t
2 . Eine solche Eichung ist immer möglich,
wenn die Eichfunktion eine bestimmte Voraussetzung erfüllt. Diese ist
div A′ (r, t) +
8.7
1 ∂φ′ (r, t)
= g(r, t)
c2 ∂t
⇔
f (r, t) = g(r, t).
(8.43)
Greensche Funktion der Wellengleichung
Wir wollen die beiden Wellengleichungen V = −q, wobei V entweder Ai oder φ und q
µ0 ji bzw. ǫρ0 ist, mit der Methode der Greenschen Funktion lösen. Also suchen wir für das
Integral
Z Z
V (r, t) =
dV ′ dt′ G0 (r − r′ ; t − t′ ) q(r′ , t′ )
eine Funktion, die die Gleichung
G0 (r − r′ ; t − t′ ) = −δ(r − r′ )δ(t − t′ )
erfüllt. Eine solche Funktion findet man durch Transformation im Fourierraum. Die dazu
notwendige Rechnung wird im Skript auf Seite 171 näher ausgeführt. Nach Rücktransformation
hat sie die Gestalt
|r − r′ |
1
′
′
′
.
(8.44)
δ t−t −
Gret (r − r ; t − t ) =
4π |r − r′ |
c
Die zur Berechnung von V notwendige Zeitintegration lässt sich also aufgrund der DeltaDistribution sehr einfach ausführen und es ist
Z Z
|r − r′ |
1
1
′ ′
′
′ ′
q(r , t ) δ t − t −
dV dt
Vret (r, t) =
4π
|r − r′ |
c
′
|
Z
q r′ , t − |r−r
c
1
′
=
dV
.
4π
|r − r′ |
Auf diese Weise kann man die sogenannten retardierten Potentiale berechnen:
|r−r′ |
′
Z
ρext r , t − c
1
dV ′
φret (r, t) =
4πǫ0
|r − r′ |
|r−r′ |
′
Z
r
,
t
−
j
makr
c
µ0
.
Aret (r, t) =
dV ′
′
4π
|r − r |
THEORETISCHE PHYSIK C
(8.45)
(8.46)
66
8 DAS VOLLSTÄNDIGE SYSTEM DER MAXWELLGLEICHUNGEN
8.8
67
Coulomb- oder transversale Eichung
Wir können die beiden inhomogenen Wellengleichungen
1 ∂2
1 ∂φ(r, t)
∆ − 2 2 A(r, t) − grad div A(r, t) + 2
= −µ0 jmakr (r, t)
c ∂t
c
∂t
ρext (r, t)
∂
∆φ(r, t) + div A(r, t) = −
∂t
ǫ0
auch unter Forderung der Coulomb-Eichung, also mit div A(r, t) = 0, lösen. Für das
elektrische Potential ergibt sich dann die bereits aus der Elektrostatik bekannte PoissonGleichung, die man wie gewohnt mit der Greenschen Funktion Ge lösen kann. Für das
Vektorpotential ergibt sich stattdessen die Gleichung
1 ∂2
1
∂φ(r, t)
∆ − 2 2 A(r, t) = −µ0 jmakr (r, t) + 2 grad
.
c ∂t
c
∂t
Den letzten Term kann man mit Hilfe des Poisson-Integrals der Elektrostatik weiter umschreiben als
Z
Z
∂ρext (r′ ,t)
′
∂φ(r, t)
1 1
µ0
1
′
′ divr′ jmakr (r , t)
∂t
dV
dV
grad
=
grad
=
grad
.
r
r
c2
∂t
c2 4πǫ0
|r − r′ |
4π
|r − r′ |
V
V
Wir zerlegen den Strom in einen quellfreien transversalen und einen wirbelfreien longitudinalen Anteil, also
jmakr (r, t) = jL (r, t) + jT (r, t) ,
div jT (r, t) = 0 ,
rot jL (r, t) = 0.
(8.47)
Mit Hilfe dieser Aufteilung gilt, dass der obige Term µ0 jL (r, t) entspricht. Entsprechend
folgt für A die einfachere Gleichung
1 ∂2
(8.48)
∆ − 2 2 A(r, t) = −µ0 jT (r, t).
c ∂t
Das Vektorpotential kann also nun mit einer retardierten Greenschen Funktion bestimmt
werden:
|r−r′ |
′
Z
r
,
t
−
j
T
c
µ0
A(r, t) =
dV ′
.
(8.49)
4π
|r − r′ |
Alternativ kann es auch berechnet werden mittels
|r−r′ |
∂
′
Z
− ǫ0 gradr′ ∂τ
φ(r′ , τ )
r
,
t
−
j
makr
c
µ0
′
dV
,
A(r, t) =
4π
|r − r′ |
woraus das elektrische Feld schließlich folgt als
Z t
1
dt′ [rot B(r, t′ ) − µ0 j(r, t′ )] .
E(r, t) = E(r, t0 ) +
ǫ 0 µ0 t 0
Anhand dieser Gleichung erkennt man gut die Kausalität der Felder, also dass sie nur von
Ereignissen bestimmt werden, die vor dem Zeitpunkt der Betrachtung passiert sind.
THEORETISCHE PHYSIK C
67
8 DAS VOLLSTÄNDIGE SYSTEM DER MAXWELLGLEICHUNGEN
8.9
68
Energiesatz und Poynting-Vektor
Wir wollen nun eine Bilanz für den Fluss von Energie in elektrischen und magnetischen
Feldern aufstellen. Hierzu verwenden wir die dritte und vierte Maxwellgleichung und multiplizieren erstere mit H und letztere mit E. Alle in diesen Gleichungen auftauchenden
Größen sind vom Ort und der Zeit abhängig, aus Gründen der Übersichtlichkeit wird diese
Abhängigkeit im Folgenden allerdings nicht immer explizit aufgeschrieben. Der auftretende Strom ist stets der makroskopische. Daraus ergibt sich
∂B
= 0
∂t
∂D
= j · E.
E · rot H − E ·
∂t
H · rot E + H ·
Mit Hilfe von Gleichung 2.18 können wir diese beiden Gleichungen miteinander in Verbindung bringen und zu einer zusammenfassen:
E·
∂D
∂B
+H·
+ div (E × H) = −j · E.
∂t
∂t
(8.50)
Um die Gleichung etwas kompakter zu gestalten definieren wir den sogenannten PoyntingVektor
S = E × H.
(8.51)
8.9.1
Energiesatz in nicht dispersiven Medien
Im Vakuum ist die Energiebilanz sehr einfach aufzustellen, da der funktionelle Zusammenhang zwischen den Feldern nur in der Multiplikation mit einer Konstanten besteht.
Aus
D = ǫ0 E und B = µ0 H
folgt, dass die Terme mit Zeitableitungen sich zusammenfassen lassen zu
∂wel ∂wmagn
∂B
∂ 1
1
∂wges
∂D
2
2
=
+H·
=
ǫ 0 E + µ0 H
+
=
.
E·
∂t
∂t
∂t 2
2
∂t
∂t
∂t
Damit folgt der Poynting’sche Satz
∂wges (r, t)
+ div S(r, t) = −j(r, t) · E(r, t).
∂t
Die globale Bilanz lautet dementsprechend
Z
Z
∂Wges
dV j(r, t) · E(r, t).
df · S(r, t) = −
+
∂t
V
(V )
(8.52)
(8.53)
Dies lässt sich außerdem vergleichen mit der kinetischen Energie von Teilchen, die wir aus
der Mechanik kennen. Diese war definiert als
2
2 X
1X
∂ri
∂ ri
∂Wkin X
∂ri
∂ri
Wkin =
=
· Fi = N.
=
⇒
mi
mi
2 i
∂t
∂t
∂t
∂t2
∂t
i
i
Als Kraft setzt man hierbei die Lorentz-Kraft ein, also
∂ri
× Bi .
F i = qi E i + q i
∂t
THEORETISCHE PHYSIK C
68
8 DAS VOLLSTÄNDIGE SYSTEM DER MAXWELLGLEICHUNGEN
69
Der hintere Term verschwindet im Skalarprodukt mit der Geschwindigkeit, die verbleibende Formel zur Berechnung der Leistung ist also
Z
X ∂ri ∂Wkin
N=
qi
· Ei =
dV j(r, t) · E(r, t) =
∂t
∂t
V
i
P
δ [r − ri (t)], der den Bewegungen der einzelnen Punktmit dem Strom j(r, t) = i qi ∂r
∂t
ladungen entspricht. Daraus folgt schließlich eine weitere Schreibweise für die globale
Energiebilanz:
Z
∂
df · S(r, t).
(8.54)
[W (t) + Wkin (t)] = −
∂t
(V )
In nicht dispersiven Medien (die dielektrische Funktion ist also nicht von der Frequenz
de Feldes abhängig) lässt sich diese Bilanz sehr analog zur eben angewandten Vorgehensweise aufstellen, allerdings unter Berücksichtigung der nun etwas komplizierteren Zusammenhänge zwischen den Feldern. Nun gilt
D(r, t) = ǫ0 ǫ(r, t)E(r, t) und B(r, t) = µ0 µ(r, t)H(r, t)
und zur Berechnung der Energiedichte benötigt man alle vier Felder:
wges (r, t) =
8.9.2
1
1
E(r, t) · D(r, t) + H(r, t) · B(r, t).
2
2
Energiesatz in dispersiven Medien
Im Falle von Dispersion muss der Energiesatz im Fourierraum betrachtet werden, um der
Frequenzabhängigkeit der dielektrischen Funktion gerecht zu werden. Diese Berechnung
ist allerdings äußerst umständlich und aufgrund dessen nicht klausurrelevant, weshalb sie
nicht in diese Zusammenfassung aufgenommen wurde. Sie ist im Skript auf den Seiten
178 bis 182 nachzulesen.
8.10
Impulssatz
Wir kennen bereits die Lorentz-Kraftdichte
f(r, t) = ρext (r, t) · E(r, t) + jmakr (r, t) × B(r, t).
(8.55)
Unser Ziel ist es nun, diese Kraftdichte in Abhängigkeit vom elektromagnetischen Spannungstensor auszudrücken. Dieser entspricht der Summe aus den elektrischen (siehe Kapitel 5.8) und magnetischen (siehe Kapitel 6.12) Spannungstensoren. Zur Diskussion dessen
betrachten wir den Fall des Vakuums, wo es nur externe Ladungen und makroskopische Ströme gibt und die Felder leicht ineinander überführbar sind. Weiterhin schreiben
wir auch hier der Übersichtlichkeit wegen die Zeit- und Ortsabhängigkeiten der beteiligten Größen nicht explizit auf. Man erreicht die gewünschte Darstellung, indem man die
Kraftdichte mit Hilfe der Maxwellgleichungen ausdrückt als
∂D
f = |E · div
{z D} + −B × rot H − ∂t .
=ρext ·E
{z
}
|
=jmakr ×B
THEORETISCHE PHYSIK C
69
8 DAS VOLLSTÄNDIGE SYSTEM DER MAXWELLGLEICHUNGEN
70
Führt man die in dieser Formel auftauchenden Operationen aus und schreibt das Resultat
um, sodass nur die Felder E und H darin enthalten sind, so lässt sich für eine Komponente
der Kraftdichte schreiben
1 ∂
− fi = 2 Si − Tij,j
(8.56)
c ∂t
mit dem elektromagnetischen Spannungstensor
Tij = ǫ0 Ei Ej + µ0 Hi Hj − δij wges = Tji
(8.57)
und der bereits bekannten Energiedichte
1
1
wges = ǫ0 Ek Ek + µ0 Hk Hk .
2
2
(8.58)
Eine andere hierin auftauchende Größe definieren wir als die elektromagnetische Impulsdichte. Sie ergibt sich aus dem Poynting-Vektor durch Division durch c2 .
pi (r, t) =
1
Si (r, t).
c2
(8.59)
Der gesamte elektromagnetische Impuls P(t) innerhalb eines Volumens ergibt sich als
Volumenintegral über diese Impulsdichte. Bringt man in diese Bilanz nun auch den mechanischen Impuls ein, dessen zeitliche Ableitung die Kraft ist, so lässt sich sagen:
Z
Z
∂
dV f(r, t).
(8.60)
Pmech =
P(t) =
dV p(r, t) ;
∂t
V
V
Letztendlich folgt also die Impuls-Bilanzgleichung
Z
Z
∂
dV
dV −fi + Tij,j +
[Pi + Pi mech ] =
| {z }
∂t
V
V
∂
pi
= ∂t
fi
|{z}
∂
= ∂t
pi mech
=
Z
dV Tij,j .
V
Die Änderung des elektromagnetischen und mechanischen Impulses in einem Volumen
entspricht also dem elektromagnetischen Impulsstrom aus dem Volumen heraus, was dem
Oberflächenintegral über den Spannungstensor entspricht:
Z
∂
dfj Tij (r, t).
(8.61)
[Pi (t) + Pi mech (t)] =
∂t
(V )
8.11
Drehimpulssatz
Ebenso wie man eine Impulsbilanz aufstellen kann ist dies auch mit dem Drehimpuls
möglich. Sowohl der mechanische als auch der elektromagnetische Drehimpuls errechnen
sich als das Kreuzprodukt aus Ort und Impuls, L = r × p. Hierzu definiert man den
Drehimpulsstromdichtetensor
Λ = T × r.
(8.62)
Die j-te Spalte dieses Tensors berechnet sich also als das Kreuzprodukt der j-ten Spalte
von T mit dem Ort. Die Drehimpulsbilanzgleichung entsteht somit sehr einfach aus der
Impulsbilanz 8.61:
Z
∂
dfj Λij (r, t).
(8.63)
[Li (t) + Li mech (t)] = −
∂t
(V )
Das negative Vorzeichen auf der rechten Seite folgt aus der Antisymmetrie des Kreuzproduktes, Λ = T × r = −r × T .
THEORETISCHE PHYSIK C
70
9 ELEKTROMAGNETISCHE WELLEN
9
9.1
71
Elektromagnetische Wellen
Wellen im Vakuum
Bei der Betrachtung von Wellen wollen wir uns zunächst keine Gedanken über deren
Entstehung machen, sondern nur ihre Propagation im quellfreien Raum (ρext = 0 und
jmakr = 0) betrachten. Hierzu betrachten wir zunächst die Potentialgleichungen bei ver= 0) lauten
schiedenen Methoden der Eichung. Im Falle von Lorenz-Eichung (div A− c12 ∂φ
∂t
die Potentialgleichungen
1 ∂2
∆ − 2 2 A(r, t) = A(r, t) = 0
c ∂t
1 ∂2
∆ − 2 2 φ(r, t) = φ(r, t) = 0.
c ∂t
Die daraus resultierenden Felder haben die Form
E(r, t) = −
∂A(r, t)
− grad φ(r, t) und B(r, t) = rot A(r, t).
∂t
(9.1)
Im Falle von Coulomb-Eichung (div A = 0) gilt hingegen
∆φ(r, t) = 0
1
∂φ(r, t)
1 ∂2
.
∆ − 2 2 A(r, t) = 2 grad
c ∂t
c
∂t
Ohne externe Ladungen muss allerdings weiterhin das skalare Potential φ komplett verschwinden, um die gegebenen Gleichungen in Einklang mit den natürlichen Randbedingungen zu bringen. Dann folgt auch A = 0 und die Felder haben die Form
E(r, t) = −
∂A(r, t)
und B(r, t) = rot A(r, t).
∂t
(9.2)
Die Wellengleichungen für die Felder erhält man aus den Maxwellgleichungen:
1 ∂ 2 E(r, t)
∂B(r, t)
=− 2
rot rot E(r, t) = −rot
∂t
c
∂t2
rot rot E(r, t) = grad div E(r, t) −∆E(r, t).
| {z }
=0
Daraus lässt sich schließlich die Wellengleichung für das elektrische Feld E ableiten, die
Herleitung für B funktioniert analog.
1 ∂2
(9.3)
∆ − 2 2 E(r, t) = E(r, t) = 0
c ∂t
1 ∂2
(9.4)
∆ − 2 2 B(r, t) = B(r, t) = 0.
c ∂t
Wählen wir für die Potentiale Coulomb-Eichung, so sind diese beiden Gleichungen erfüllt,
wenn das Vektorpotential seine Potentialgleichung erfüllt. Wir suchen also nach einer
Lösung von
1 ∂ 2 A(r, t)
∆A(r, t) − 2
=0
(9.5)
c
∂t2
THEORETISCHE PHYSIK C
71
9 ELEKTROMAGNETISCHE WELLEN
72
unter der Nebenbedingung div A(r, t) = 0. Als Ansatz hierzu nutzen wir ebene harmonische Wellen, die sogenannten Normalmoden des Vakuums. Mathematisch ausdrücken
lassen sich diese als
A(r, t) = a(k, ω) ei(k·r−ωt) .
(9.6)
Physikalisch relevant ist nur der Realteil dieser komplexen Größe. Um die Forderung nach
Verschwinden der Divergenz zu erfüllen, gilt
div A(r, t) = ik · a(k, ω) ei(k·r−ωt) = 0 ⇒ k ⊥ a(k, ω).
(9.7)
Weiterhin ist
∆A(r, t) = −k 2 a(k, ω) ei(k·r−ωt) = −k 2 A(r, t)
und
1 ∂ 2 A(r, t)
ω2
ω2
i(k·r−ωt)
= − 2 a(k, ω) e
= − 2 A(r, t).
c2
∂t2
c
c
Damit also stets die Potentialgleichung erfüllt ist, muss die Dispersionsrelation
k 2 = (kx2 + ky2 + kz2 ) =
ω2
c2
(9.8)
und k = 2π
noch einige weitere Zusammenhänge,
gelten. Daraus folgen mit ω = 2π
T
λ
darunter T = ν1 , ω = 2πν und c = λν. Die Geschwindigkeit, mit der sich eine Fläche konstanter Phase einer solchen Welle fortbewegt, wird als Phasengeschwindigkeit bezeichnet.
Sie entspricht der Lichtgeschwindigkeit c. Dies folgt aus
kz − ωt = k(z + ∆z) − ω(t + ∆t) → k∆z = ω∆t → ∆z = c∆t,
wobei o.B.d.A. eine Wellenausbreitung in z-Richtung (kx = ky = 0, kz = k) angenommen
wurde. Die Felder folgen aus diesem Potential als
E(r, t) = iωA(r, t) und B(r, t) = ik × A(r, t).
(9.9)
Wegen des Zusammenhangs
B(r, t) =
1k
1
k × E(r, t) =
× E(r, t)
ω
ck
(9.10)
bilden die Vektoren k, E und B ein Rechtssystem.
9.2
Wellen im homogenen transparenten Medium
Innerhalb von Medien muss zunächst eine andere Wellengleichung gefunden werden als
jene, die im Vakuum Gültigkeit besitzt. Hierzu beginnt man erneut bei
rot rot E(r, t) = −µ0 rot
∂H(r, t)
∂ 2 D(r, t)
.
= −µ0
∂t
∂t2
Den Zusammenhang zwischen E und D betrachten wir nun im Fourierraum:
D̄(r, ω) = ǫ0 ǫ(ω)Ē(r, ω).
THEORETISCHE PHYSIK C
72
9 ELEKTROMAGNETISCHE WELLEN
73
Da wir ein homogenes Medium voraussetzen ist die dielektrische Funktion nicht vom Ort,
sondern nur von der Frequenz abhängig. Nutzen wir weiterhin aus, dass c12 = µ0 ǫ0 , können
wir obige Gleichung vollkommen auf das E-Feld umschreiben:
ω2
ǫ(ω)Ē(r, ω).
c2
Diese doppelte Rotation lässt sich nun wie bereits im Vakuum zum Laplace-Operator
umwandeln, weil die Divergenz dieses elektrischen Feldes verschwindet. Dies liegt an
0 = div D̄(r, ω) = div ǫ0 ǫ(ω)Ē(r, ω) = ǫ0 ǫ(ω)div Ē(r, ω) = 0.
rot rot Ē(r, ω) = −µ0 (−ω 2 )D̄(r, ω) =
Die Wellengleichung für das E-Feld in transparenten homogenen Medien lautet also
ω2
ǫ(ω)Ē(r, ω) = 0.
(9.11)
c2
Man nennt diese Gleichung auch Helmholtzgleichung. Um sie zu lösen verwendet man
wieder einen Ansatz aus ebenen Wellen. Man schreibt
∆Ē(r, ω) +
Ē(r, ω) = e(k, ω) eik·r .
(9.12)
Da die Divergenz dieses Feldes verschwinden soll gilt weiterhin
div Ē(r, ω) = ik · e(k, ω) eik·r = 0 ⇒ k ⊥ e(k, ω).
Setzt man den Ansatz in die Helmholtzgleichung (9.11) ein, so ergibt sich
ω2
ω2
2
k − 2 ǫ(ω) e(k, ω) eik·r = 0 ⇒ k 2 = 2 ǫ(ω).
c
c
(9.13)
(9.14)
Das elektrische Feld im normalen Raum erhält man schließlich durch Rücktransformation
gemäß
Z
∞
dω e(k, ω) ei(k·r−ωt) ,
E(r, t) =
−∞
wobei auch von der dabei entstehenden Größe nur der Realteil tatsächliche physikalische
Relevanz besitzt. Dieses Integral lässt sich ohne genauere Kenntnis über die Materialeigenschaften nicht lösen, jedoch kann man auch unabhängig davon den Spezialfall zeitlich
sehr langer Pulse diskutieren, deren Frequenzen alle in der engen Umgebung einer festen
Trägerfrequenz ω0 liegen. Für derartige Pulse lässt sich der Wellenvektor entsprechend
der Dispersionsrelation um ω0 entwickeln:
1 ∂ 2 k ∂k (ω − ω0 )2 + . . . .
(ω − ω0 ) +
k(ω) = k(ω0 ) +
∂ω ω0
2 ∂ω 2 ω0
Es reicht aus, die ersten drei Terme dieser Entwicklung zu berücksichtigen, von denen
jeder eine bestimmte physikalische Bedeutung hat:
k(ω0 )
ω0
= vph1(ω0 ) beschreibt die Phasenlage und ist das Inverse der Phasengeschwindigkeit des Pulses.
∂k 1
• ∂ω
= vg (ω
ist die Gruppengeschwindigkeit, die beschreibt, wie schnell sich der
ω0
0)
Puls als Ganzes ausbreitet. In einem absorptionsfreien Medium meint dies die Fortbewegung des Maximums.
∂2k • ∂ω2 = D(ω0 ) ist die Gruppengeschwindigkeitsdispersion. Sie beschreibt sie Änderung
•
ω0
der zeitlichen Ausdehnung des Pulses bei Ausbreitung durch das Medium.
THEORETISCHE PHYSIK C
73
9 ELEKTROMAGNETISCHE WELLEN
9.3
74
Wellenerzeugung im Vakuum
Bei der bisherigen Betrachtung wurde die Entstehung von Wellen nicht untersucht, ihre
Existenz wurde als gegeben angenommen. Natürlich gilt aber auch für Wellen das Prinzip
der Kausalität, das besagt, dass die nicht ohne eine Ursache entstehen. Diese Ursachen
sind, wie bei allen elektrischen und magnetischen Feldern üblich, externe Ladungen und
makroskopische Ströme, die nun mit einer periodischen zeitlichen Veränderlichkeit versehen sein müssen, damit sie Wellen erzeugen können. Man macht also grundlegend den
Ansatz
Z ∞
Z ∞
′
′
−iωt′
′ ′
′ ′
dω ρ̄ext (r′ , ω) e−iωt .
dω j̄makr (r , ω) e
; ρext (r , t ) =
jmakr (r , t ) =
−∞
−∞
Da jedoch alle Wellen und Felder als Superpositionen von Wellen und Feldern mit einer
einzigen Frequenz geschrieben werden können lässt sich auch ein solcher Ansatz für Ströme
und Ladungen verwenden:
jmakr (r′ , t′ ) = j̄makr (r′ ) e−iωt
′
;
′
ρext (r′ , t′ ) = ρ̄ext (r′ ) e−iωt .
′
|
Hierbei ist t′ stets die retardierte Zeit, also t′ = t − |r−r
. Dies legt nahe, retardierte
c
Potentiale zu verwenden, also
|r−r′ |
′
Z
ρext r , t − c
1
dV ′
φret (r, t) =
4πǫ0
|r − r′ |
|r−r′ |
′
Z
r
,
t
−
j
makr
c
µ0
Aret (r, t) =
.
dV ′
′
4π
|r − r |
Mit diesen Ansätzen und Hilfsmittels lassen sich Gesetzmäßigkeiten für die Entstehung
von Wellen finden. Da diese Thematik allerdings die in einer Klausur zu erwartende Komplexität übersteigt wird dies hier nicht näher ausgeführt. Eine weitere Betrachtung dieses
Sachverhalts sowie nähere Informationen zu elektrischer Monopol- und Quadrupolstrahlung und magnetischer Dipolstrahlung finden sich im Skript auf den Seiten 191 bis 199.
THEORETISCHE PHYSIK C
74
LITERATUR
75
Literatur
[1] Offizielles Skript von Prof. Dr. Carsten Rockstuhl
[2] Herleitung des Laplace-Operators in Kugelkoordinaten
http://qudev.phys.ethz.ch/content/science/BuchPhysikIV/PhysikIVap6.html
[3] Wikipedia-Artikel zu Kugelflächenfunktionen
https://de.wikipedia.org/wiki/Kugelfl%C3%A4chenfunktionen
[4] Übungsblatt 11 zur Vorlesung
THEORETISCHE PHYSIK C
75