Induktion - Freie Universität Berlin
Werbung

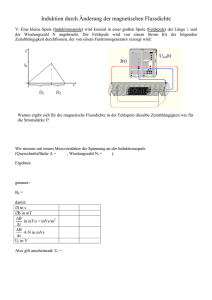
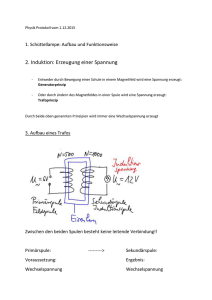
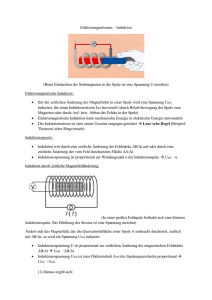
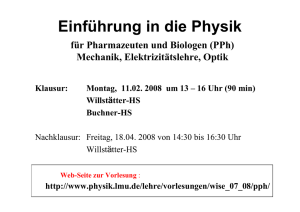
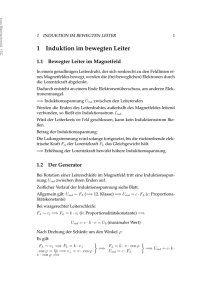
Induktion Christopher Bronner, Frank Essenberger Freie Universität Berlin 27. September 2006 Inhaltsverzeichnis 1 Physikalische Grundlagen 1 2 Aufgaben 5 3 Messprotokoll 3.1 Geräte . . . . . . . . . . . 3.2 Allgemeine Parameter und 3.3 Aufgabe 1 . . . . . . . . . 3.4 Aufgabe 2 . . . . . . . . . 3.5 Aufgabe 3 . . . . . . . . . . . . . . . . . . Bemerkungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 6 6 6 7 7 4 Auswertung 4.1 Aufgabe 1 4.2 Aufgabe 2 4.3 Aufgabe 3 4.4 Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 8 10 11 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Diskussion 1 . . . . . . . . . . . . 12 Physikalische Grundlagen Das magnetische Feld in einer idealen (unendlich langen) Spule der Länge l mit Windunszahl n ergibt sich aus dem Ampereschen Gesetz I Z ~ ~ H · d~s = ~j · dA (1) C A für eine Fläche A und ihre Randkurve C. 1 Abbildung 1: Integrationsweg Hier ist nun das Integral einfach I ~ · d~s H Z2 = ~ · d~s + H 1 C Z3 ~ · d~s + H Z4 2 3 ~ · d~s + H Z1 ~ · d~s H 4 Z1 = ds 0+0+0+H 4 = Hl Z ~ = nI ~j · dA A Also berechnet sich das Magnetfeld zu nI (2) l Zwischen der magnetischen Flussdichte B und dem Magnetfeld H besteht im Medium mit der magnetischen Permeabilität µr der Zusammenhang H= B = µH = µ0 µr H (3) wobei in unserem Experiment kein magnetisches Medium vorhanden ist und daher µr = 1 ist. Es ist also die magnetische Flussdichte B= µ0 nI l 2 (4) Das ist jedoch eine Näherung für die ideale Spule und muss für eine echte Spule mit endlicher Länge wegen des schwächeren und zunehmend inhomogeneren Magnetfeldes an den Enden der Spule um einen Formfaktor F (a) korrigiert werden, wobei a der Abstand eines Punktes auf der Spulenachse von einem Ende ist. " # a l−a nI nI 1 √ F (a) (5) +p =: H= 2 2 2 2 l 2 l r +a r + (l − a) Um das auf eine Induktionsspule der Länge s mit Mittelpunkt im Abstand a vom Ende der Feldspule innerhalb einer Feldspule wirkende Magnetfeld geeignet zu beschreiben, bildet man einen mittleren Formfaktor als Integration über den Bereich der Induktionsspule und nennt das Resultat das mittlere Feld. l+s 2 nI 1 H̄(s) = l 2s Z F (a)da =: nI F̄ (s) l (6) l−s 2 Durch eine zeitliche Änderung des magnetischen Flusses Z ~ · dA ~ φ= B (7) A ~ durch eine geschlossene Leitereines magnetischen Feldes der Flussdichte B schleife der Fläche A wird in dieser eine Induktionsspannung Uind induziert. Das besagt das Faradaysche Induktionsgesetz: Uind = φ̇ (8) Die zeitliche Änderung kann durch Änderung der Fläche, des magnetischen Feldes oder/und des Winkels zwischen den beiden Vektoren erfolgen. Ein stromführender Leiter erzeugt bei zeitlich veränderlichem Strom I ein ebenso veränderliches Magnetfeld, das in ihm wiederrum zu Selbstinduktion führt. Da die induzierte Spannung zur Änderung des magnetischen Flusses, deshalb zur Änderung des Magnetfeldes und also zur Änderung des Stromes proportional sein muss, kann man mit einer Proportionalitätskonstanten L schließen: Uind = −LI˙ (9) Man nennt daher L die Induktivität einer Leiterkonfiguration. Für die Selbstinduktion einer Spule mit n Windungen ergibt sich aus Gl. 8, Gl. 4 und Gleichsetzen mit Gl. 9 d(BA) A = −nAḂ = −µ0 n2 I˙F̄ (s) = −LI˙ dt l die Induktivität einer Spule als Uind = −nφ̇ = −n 3 (10) A F̄ (s) (11) l In einem Schaltkreis mit einer Spannungsquelle, die eine symmetrische Rechteckspannung generiert, und einer Spule verhält sich die Spule wie eine ideale Spule und ein Widerstand RL , die in Reihe geschaltet sind. Der Spannungsquelle wird auch ein Widerstand RI zugesprochen. L = µ0 n2 Abbildung 2: Schaltbild In dieser Masche gibt das Kirchhoffsche Gesetz die Differentialgleichung für den Stromverlauf nach dem Umschaltzeitpunkt t = 0. UG = RI I + LI˙ + RL I (12) RL +RI ˙ Die homogene Gleichung lautet I + L I = 0. Mit dem Ansatz I(t) = +RI Ae−Bt erhält man B = RLL . Für eine Partikularlösung setzt man I(t) = UG const. und erhält I(t) = RL +RI . Durch Addition der beiden Lösungen erhält man RL +RI UG + Ae− L t (13) R L + RI Hieraus kann man mit der Randbedingung, dass nach ausreichend langer Zeit die Induktion abklingt und somit die Spule keine induktionsbedingten Spannungsabfälle produziert, UG = (RL + RI )I(t → ∞) aus dem Ohmschen Gesetz A bestimmen und erhält als Lösung der inhomogenen Gleichung: I(t) = I(t) = RL +RI UG 1 − 2e− L t RL + R I 4 (14) Nach ausreichend langer Zeit t → ∞ nach dem Umschalten erreicht der Kreis den Grenzstrom Igrenz = UG R L + RI (15) Lässt man durch die Feldspule einen Wechselstrom der Art I(t) = I0 cos(ωt) (16) fließen, so ist das das Magnetfeld, das im Inneren einer eingeschlossenen Induktionsspule, die unter einem Winkel α gegen das Feld geneigt ist, vorliegt B(t) = µ0 nF I0 cos(ωt) · F̄ (s cos(α)) lF (17) Wegen Uind = −nI φ̇ und φ(t) = B(t)AI cos α ist die induzierte Spannung in der inneren Spule Uind = 2 µ0 nF nI AI0 ω cos α sin(ωt)F̄ (s cos α) lF (18) Aufgaben 1. Untersuchung der Induktionsspannung in Abhängigkeit von der Zeit an einer Probespule (Induktionsspule) innerhalb einer Magnetspule (Feldspule) bei Anlegen einer Rechteckspannung an die Feldspule. Berechnung der induzierten Spannung für t=0 und des Selbstinduktionskoeffizienten der Feldspule. Vergleich der Ergebnisse mit den theoretischen Erwarungen. 2. Messung der Induktionsspannung (Effektivwert) an der Induktionsspule bei einem Wechselstrom durch die Feldspule in Abhöngigkeit von der Frequenz des Feldstromes. Qualitativer und quantitativer Vergleich des Ergebnisses mit der theoreischen Erwartung. 3. Messung der Induktionsspannung (Effektivwert) an der Induktionsspule bei einem Wechselstrom durch die Feldspule in Abhängigkeit von der Orientierung der Induktionsspule bei einer Frequenz von 100 Hz. Zusätzliche Messung der Induktionsspannung bei einer Frequenz von 1000 Hz bei der Winkelstellung 0◦ . Qualitativer und quantitativer Vergleich der Ergebnisse mit den theoretischen Erwartungen. 3 Messprotokoll Tutor: Theis Datum: 27. September 2006 Beginn: 15.00, Ende: 17.30 5 3.1 Geräte • Funktionsgenerator (Rechteck- u. Sinusspannung) • Feldspule (n = 1000, l = (190 ± 1) mm, A = (19, 73 ± 0, 02) cm2 ) • Lange Induktionsspule (n = 500, l = (190±1) mm, A = (1, 60±0, 02) cm2 ) • Neigespule (n = 300, l = (7, 0 ± 0, 2) mm, d = (23, 0 ± 0, 5) mm) • Oszilloskop Hameg HM 203-4, Fehler der Ablesekoeffizienten: 3% + Ablesefehler • Multimeter zur Widerstandsmessung: ∆R → 0, 5% + 3dgt. • Multimeter zur Frequenzmessung: Voltcraft M-3860M • Multimeter zur Strom-/Spannungsmessung: Voltcraft M-3860M ∆UAC → 2, 5% + 5dgt., ∆IAC → 2, 5% + 3dgt. 3.2 Allgemeine Parameter und Bemerkungen Widerstand der Feldspule: RL = 7, 15 Ω Widerstand der Induktionsspule: RS = 3, 28 Ω 3.3 Aufgabe 1 Hier wurde mit dem Funktionsgenerator an die Feldspule eine Rechteckspannung angelegt und von der koaxialen, kleineren und ebenso langen Induktionsspule die Induktionsspannung abgegriffen und als Funktion der Zeit auf dem Oszilloskop angezeigt. Der Funktionsgenerator lieferte eine Frequenz von ν ≈ 100 Hz. Die Amplitude am Funktionisgenerator haben wir auf etwa 3 Skt. eingestellt, was ungefähr 30 mA entspricht. t/0, 5 ms -4 -3 -2 -1 0 1 2 3 Uind /Skt. 5,0 2,7 1,4 0,6 0,3 0,1 0,0 0,0 Tabelle 1: Uind in Abhängigkeit von t Den Ablesefehler bei der Spannung schätzen wir auf ±0, 1 Skt. 6 Qualitativ: Die beiden Kurven auf dem Oszilloskop (UG und Uind ) zeigen ein exponentielles Abklingen, haben aber unterschiedliches Vorzeichen und Uind hat einen höheren Anfangswert, geht aber im Gegensatz zu UG auf Null zurück. Zur Vermessung der Spannungskurve der Feldspannung haben wir den Anfangsund den Endwert der Spannung am Oszilloskop abgemessen, indem wir die Differenz zum Mittelpunkt zwischen unterer und oberer Halbperiode gemessen haben. Ausserdem haben wir auf die gleiche Weise die Generatorspannung gemessen, wobei die Spule abgeklemmt war. U0 = 3 Skt., U∞ = 1 Skt., UG = 2 Skt. Das Oszilloskop war dabei so eingestellt, dass ein Skt. gerade 0,5 V entsprach. Zusätzlich haben wir noch UG = 1, 020 V direkt mit einem Multimeter gemessen. 3.4 Aufgabe 2 Bei der zweiten Aufgabe verwendeten wir die gleiche Konfiguration wie bei der ersten, haben jedoch an Stelle der Spannungsmessung UG die Frequenz der Generatorspannung gemessen und ausserdem wurde der Spulenstrom mit einem Multimeter als Effektivwert gemessen und nachreguliert. Diesmal haben wir den Funktionsgenerator auf eine Sinus-Spannung (normale Wechselspannung) eingestellt. Die induzierte Spannung haben wir als Effektivwert mit einem Multimeter gemessen. ν/Hz 101 199 299 400 503 603 700 800 903 1000 IF /mA 15,1 15,0 15,1 15,0 15,1 15,0 15,0 15,1 14,9 15,1 Uind /mV 45,0 89,0 134,0 178,5 225,6 269,0 312,4 357,8 401,0 446,0 Tabelle 2: Uind in Abhängigkeit von ν 3.5 Aufgabe 3 Bei der dritten Aufgabe haben wir in die Feldspule eine kleine drehbar gelagerte Spule (n = 300) geschoben. Wir haben wieder eine Sinus-Spannung an die Feldspule angelegt und Uind mit dem Multimeter gemessen. Auch hier haben wir wieder den Spulenstrom wieder gemessen und nachreguliert (wobei letzteres kaum nötig war). 7 ν/Hz 100 100 100 100 100 100 100 100 100 100 1000 α/◦ 0 10 20 30 40 50 60 70 80 90 0 IF /mA 37,8 37,8 37,8 37,8 37,8 37,8 37,8 37,8 37,8 37,8 37,7 Uind /mV 15,0 14,8 14,2 13,0 11,5 9,7 7,5 3,8 2,0 0,1 57,6 Tabelle 3: Uind in Abhängigkeit vonα Als Ablesefehler für den Winkel haben wir ±1◦ geschätzt. 4 Auswertung 4.1 Aufgabe 1 Zur Berechnung des Formfaktors F̄ (s) stellen wir zunächst fest, dass s = l ist, da beide Spulen gleich lang sind. Es gilt nach Gl. 6 und Gl. 5 F̄ = 1 l = 1 l Zl F (a)da (19) 0 q 2 2 rF + l − rF (20) Den Fehler errechnen wir nach dem Gaußschen Fehlerfortpflanzungsgesetz s 2 2 ∂ F̄ ∂ F̄ 2 ∆F̄ = ∆rF + ∆l2 (21) ∂rF ∂l Daraus berechnet sich ein Formfaktor von (Den Fehler haben wir mit Mathematica numerisch ausgerechnet) F̄ = 0, 8768 ± 0, 0007 Um den theoretischen Wert der Induktivität aus den Maßen der Feldspule Spule abzuschätzen, benutzen wir Gl. 11. n2 A F̄ L = µ0 p l δL = δA2 + δl2 + δ F̄ 2 8 (22) (23) Damit ergibt sich LF = (11, 44 ± 0, 07) mH Zur Berechnung des Innenwiderstandes des Funktionsgenerators erhält man aus der Kirchhoffschen Regel das Gleichungssystem U0 U∞ = UG − RI I0 = UG − RI I∞ (24) (25) Die Lösung ergibt U∞ − U0 (26) U0 − U∞ + 2UG Den Fehler haben wir wieder mit Gauß in Mathematica berechnet. Zum Weiterrechnen sind mehr Stellen angegeben. RI = RL RI = (2, 383 ± 0, 149) Ω (27) Den funktionalen Zusammenhang zwischen Uind und t erhält man mit I(t) ˙ : aus Gl. 14 aus der Gleichung für Uind = −nI φ̇ = −nI AI Ḃ = −nI AI µ0 nF I(t) l 2 UG − RLL+RI t F Uind (t) = − µ0 nI nF AI e l LF Grafisch dargestellt wird der Zusammenhang ln Uind (t) = − R L + RI t + const. =: −mt + const. LF Abbildung 3: Zusammenhang zwischen Uind und t Ω Vom Computer ausgegebene Steigung: m = (671 ± 41) H 9 (28) (29) Leider können wir den Wert von Uind für t = 0 nicht bestimmen, da wir es versäumt haben, die Kurve so einzustellen, dass wir jetzt wüssten, wo der linke Rand war. Den aus der Grafik abgelesenen Wert für die Steigung m lässt sich wieder in LF umrechnen. LF = R L + RI s m δLF = δm2 + 2 ∆RI2 + ∆RL (RL + RI )2 Damit ergibt sich der Wert für die Induktivität der Feldspule als LF = (14, 2 ± 0, 9) mH Das qualitative Bild der beiden Graphen auf dem Oszilloskop entspricht nicht der Erwartung: Beide klingen exponentiell ab, die Induktionsspule hat eine größere Spannung als die Feldspule. Nach der Regel für den unbelasteten G ) müsste Uind aber nur etwa1 halb so groß sein Transformator ( nnFI = − UUind wie UG . Dass beide unterschiedliche Vorzeichen haben (Lenzsche Regel), ist allerdings der Fall. Erwartungsgemäß geht Uind auf Null zurück, wenn der Umschaltvorgang abklingt, da ja auch die Änderung des Magnetfeldes zurückgeht. Dass hingegen UG auf einer Spannung ungleich Null verbleibt ist klar, diese entspricht dann gerade dem Fall, in dem der Funktionsgenerator nur mit einem Widerstand der Größe RL belastet würde. 4.2 Aufgabe 2 Nach der Formel für die an der Induktionsspule abfallende Spannung Uind für den Fall einer angelegten Sinus-Spannung nach Gl. 18 berechnet sich die Steiung als Uind µ0 nF nI AI I0 2π = cos αF̄ (s) = (0, 44 ± 0, 02) mW b ν l Den Sinusterm haben wir Eins gesetzt, da wir nur die Einhüllende betrachten wollen. Der Strom war in dieser Messung 15, 0 mA. Aus der grafischen Auftragung für die gemessenen Werte von Uind als Funktion von ν ergibt sich der folgende Graph, der auch qualitativ der Erwartung eines linearen Zusammenhangs entspricht: 1 Eigentlich geht diese Regel von gleichen magnetischen Flüssen durch die beiden Spulen aus, was gleiche Flächen vorraussetzen würde. Das ist hier nicht ganz gegeben. 10 Abbildung 4: Zusammenhang zwischen Uind und ν Die vom Computer ausgegebene Steiung beträgt Uind = (0, 45 ± 0, 02) mW b ν . Die Antwort auf die Frage, warum der Feldstrom bei steigender Frequenz nach oben nachgeregelt werden muss, liegt darin, dass die Impedanz XL = ωL, der “Blindwiderstand”, proportional zur Frequenz ist. 4.3 Aufgabe 3 Bei der letzten Aufgabe haben wir die induzierte Spannung Uind in Abhängigkeit des Winkels α zwischen den Achsen von Feld- und Neigungsspule gemessen. Dabei gilt wieder der funktionale Zusammenhang aus Gl. 18. Uind µ0 nF nI AI I0 2πν = cos α lF (30) Die Frequenz war in er Messreihe ν = 100 Hz und I0 = 37, 8 mA. Die Fläche AI berechnet sich aus dem aus dem Platzskript bekannten Durchmesser. Als theoretischer Wert ergibt sich somit Uind = (20 ± 2) mV cos α Auch hier haben wir wieder den Sinus Eins gesetzt, da wir nur die Einhüllende betrachten wollen. Auch den Formfaktor haben wir wegen der geringen Größe der drehbaren Spule Eins gesetzt. Die wesentliche Fehlerquelle im theoretischen Wert ist der in die Fläche AI eingehende Durchmesser der Neigungsspule mit einem relativen Fehler von 2,2%, der quadratisch eingeht. Aus der graphischen Auswertung mit Mathematica erhalten wir 11 Uind = (15, 5 ± 0, 7) mV cos α Die Werte zeigen aber einen deutlichen linearen Zusammenhang und deutet daher auf eine Abhängigkeit der Form cos α hin. Abbildung 5: Zusammenhang zwischen Uind und α 4.4 Ergebnisse Für die Induktivität der Feldspule erhalten wir den theoretischen Wert LF = (11, 44 ± 0, 07) mH, gemessen LF = (14, 2 ± 0, 9) mH. Die beiden Werte sind gerade noch verträglich. Für die Frequenzabhängigkeit erhalten wir Uind = (0, 44 ± 0, 02) mW b theoreν tisch und aus der Messung Uind = (0, 45 ± 0, 02) mW b. Die Werte können als ν gleich angesehen werden. Uind Als Abhängigkeit vom Winkel ermitteln wir cos α = (20 ± 2) mV aus der TheoUind rie und cos α = (15, 5 ± 0, 7) mV aus der Messung. Auch diese Werte sind nur verträglich. Allgemein entsprachen die erhaltenen Kurven unseren Erwartungen. 5 Diskussion Die relativ großen Abweichungen von Theorie- und Messwert sind bei Aufgabe 1 und 3 schon recht unbefriedigend, wenn auch noch verträglich, Aufgabe 2 lieferte gute und konsistente Ergebnisse. Eine große Fehlerquelle war das Ablesen der Zentimeterskala am Oszilloskop. Der relativ dicke Strich und die grobe Skalaeinteilung machten das Ablesen ein wenig schwierig. Zudem ist die Nulleinstellung keine sichere Sache, da der Strahl breit ist und der Strahl ja nur asymptotisch an die Null herangeht, wobei die Abklingdauer (bis zum nächsten Umschalten) in diesem Versuch relativ klein 12 war. Uns zuzuschreiben ist der Fehler, dass wir den Messbereich der Spannung auf dem Oszilloskop nicht verändert haben, um noch mehr Werte auswerten zu können. Mögliche Streufelder aus der Spule haben wir dadurch zu vermeiden versucht, dass wir sie mit langen Kabeln einfach weiter weg gestellt haben, um die Messgerät (insb. das Oszilloskop) nicht zu beeinträchtigen. Die Kabel haben wir möglichst koaxial zur Spule gelegt, sodass dort möglichst wenig Spannung induziert werden konnte. Eine weitere Fehlerquelle war die schwankende Stromstärke, die dann ein schwankendes Magnetfeld zur Folge gehabt haben muss. Die Schwankung betraf allerdings nur die letzte Nachkommastelle auf dem Amperemeter, also die vierte signifikante. Das genaue Angleichen der Stromstärke bei Aufgabe 2 wurde dadurch natürlich etwas erschwert. Erfreulich war jedoch die Genauigkeit der Frequenzmessung, da der Vergleich von Multimeteranzeige (wo leider auch kein Fehler angegeben war) und Oszilloskop eine hohe Übereinstimmung ergab. Schließlich war noch die Winkelskala bei der Neigungsspule recht unpräzise, was wesentlich zu dem Fehler des dort gemessenen Werts beiträgt. Allgemein waren die hohen Multimeterfehler, insb. für die Spannungsmessung, wieder ärgerlich. Ein Rätsel bleibt uns die Frage, weshalb der qualitative Kurvenverlauf aus Aufgabe 1 so garnicht mit der Vorhersage der Transformatorregel übereinstimmt. 13