Mechanik 2
Werbung

Medizinische Physik und Statistik
WS 2016/2017
Mechanik II
Die Mechanik von Massenpunkten
Tamás Marek
14. September 2016
Gliederung
• Einleitung
• Beschreibung von Bewegungen, Kinematik
• Kräfte und ihre Wirkung, Dynamik
• Einfache mechanische Maschinen
Wiederholung
In der medizinischen Praxis werden täglich verlässliche
Informationen darüber benötigt, wie sich bestimmte
Eigenschaften des menschlichen Organismus verhalten.
Dabei werden diese Messergebnisse mit solchen aus der
Vergangenheit verglichen und so über Normalität bzw.
Anomalie entschieden.
Für solche Vergleiche eignen sich nur solche Eigenschaften
eines Systems, die sich, durch die Definition geeigneter
Kriterien, von anderen Eigenschaften möglichst eindeutig
abgrenzen und quantifizieren lassen. Es muß also möglich
sein die ’Menge’ der Eigenschaft als ein Mehrfaches
einer ’Einheitseigenschaft’ auszudrücken.
Wiederholung
Die Eigenschaft muß also eindeutig
abgrenzbar und meßbar sein!
In den Naturwissenschaften werden solche Eigenschaften
Größen, z.B. physikalische Größen, genannt. Der Wert einer
physikalischen Größe ist somit durch eine Maßzahl und eine
Einheit definiert.
Größenwert = {Maßzahl} ’mal’ [Einheit]
l
=
1
m
Einleitung
Basisgrößen und Abgeleitete Größen
Es lässt sich zeigen, dass in der Physik alle Größen auf 7
Basisgrößen zurückgeführt werden können.
Basisgröße
Symbol
Basiseinheit (Zeichen)
Länge
l
1 Meter
(1 m)
Masse
m
1 Kilogramm
(1 kg)
Zeit
t
1 Sekunde
(1 s)
el. Stromstärke
I
1 Ampere
(1 A)
Temperatur
T
1 Kelvin
(1 K)
Lichtstärke
Stoffmenge
I
n
1 Candela
(1 cd)
1 Mol
(1 mol)
Einleitung
Beispiele für Abgeleitete Größen
Abgeleitete Größen
Symbol
Basiseinheit (Zeichen)
Fläche
A
l2
(m2)
Volumen
V
l3
(m3)
Geschwindigkeit
v
l/t
(m/s)
Beschleunigung
a
l/t2
(m/s2)
Dichte
ρ
m/l3
(kg/m3)
Einleitung
Das wissenschaftliche Modell
Dem Modell kommt im wissenschaftlichen Erkenntnisprozess eine große Bedeutung zu. Es dient u.a. dazu,
komplexe Sachverhalte zu vereinfachen zu idealisieren
und so unserer Anschauung zugänglich zu machen.
Aufgabe der physikalischen Modellbildung ist also die
Reduktion der betrachteten z.B. mechanischen Strukturen
auf ein funktionell gleichwertiges Ersatzsystem, das der
systematischen, mathematischen Behandlung leichter
zugänglich ist.
Einleitung
Ein Modell ist gekennzeichnet durch:
Abbildung – Ein Modell ist stets eine ‚Kopie‘ von etwas,
repräsentiert ein natürliches oder einen künstliches
Original, das selbst wieder Modell sein kann.
Verkürzung – Ein Modell erfasst im Allgemeinen nicht alle
Attribute des Originals, sondern nur diejenigen, die dem
Modellschaffer bzw. Modellnutzer relevant erscheinen.
Pragmatismus – Modelle sind ihren Originalen nicht per se
eindeutig zugeordnet. Sie erfüllen ihre Aufgabe:
a) für bestimmte Subjekte
(Für Wen?),
b) innerhalb bestimmter Zeitintervalle (Wann?)
c) unter Einschränkung auf bestimmte gedankliche oder
tätliche Operationen
(Wozu?).
Einleitung
„Das menschliche Modell“
‚Kopie‘ von etwas
Verkürzung auf
relevante Attribute
Pragmatismus
Für Wen?
Wann?
Wozu?
Einleitung
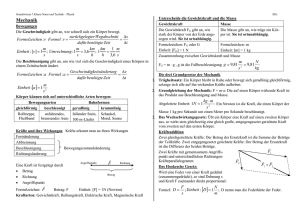
Betrachten wir einen beliebigen starren Körper im Raum
ohne Zwangsbedingungen, so verfügt er über sechs
Freiheitsgrade:
drei Translations- und
drei Rotationsfreiheitsgrade.
Er kann also entlang der X-,
Y- und Z-Achse verschoben
werden und sich um die X-,
Y- und Z-Achsen drehen.
(Hinzu käme noch die
Deformation!)
Einleitung
Führen wir Zwangsbedingungen ein (z.B. eine ortsfeste
Drehachse, oder wir frieren die Rotation gänzlich ein), so
reduziert sich die Zahl der Freiheitsgrade. Die
physikalische Behandlung der Bewegung wird so immer
einfacher.
Drehachse
Einleitung
Wir können also allgemein feststellen, dass alle
Bewegungen auf eine Kombination geradlinige und
Kreisbewegungen zurückgeführt werden können! Diese
beiden Bewegungsarten können voneinander unabhängig
untersucht und dann wieder kombiniert werden.
Deshalb wird in der physikalischen Betrachtung der
Mechanik, mehr aus pragmatischen Gründen, die
Diskussion der geradlinigen und Kreisbewegungen in zwei
getrennten Abschnitten vorgenommen!
Wir werden hier auch geradlinige und Kreisbewegungen
getrennt behandeln.
Modell des Massenpunktes
Def.:Idealisierung eines Körpers als mathematischer Punkt
mit verschwindender Ausdehnung, aber endlicher Masse.
Ein Massenpunkt besitzt keine Rotationsfreiheitsgrade!!
Die Bewegung eines Körpers kann durch das Modell des
Massenpunktes idealisiert werden wenn: unter den gegebenen physikalischen Bedingungen ausreicht, nur die Bewegung des Schwerpunktes des Körpers zu untersuchen, ohne
die räumliche Verteilung der Masse zu berücksichtigen.
In diesem Abschnitt werden alle Bewegungen als
Bewegungen von Massenpunkten idealisiert, folglich
reduziert sich die Zahl der Freiheitsgrade von 6 auf3.
Bezugssysteme
Ruhe und Bewegung
sind Begriffe, die nur
relativ zu einem
Bezugssystem einen
Sinn haben.
Wir verwenden meist
das sog. Laborsystem.
Der Ort eines Punktes im
Laborsystem
Koordinatensystem
Ortsvektor
r(x,y,z)
Als Ortsvektor oder Radiusvektor
eines Punktes bezeichnet man in
der Mathematik und in der Physik
einen Vektor, der von einem festen
Bezugspunkt zu diesem Punkt
(Ort) zeigt.
Vektoren
Ein Vektor kann durch einen Pfeil
repräsentiert werden, dessen Länge dem
Betrag entspricht und dessen Richtung
eindeutig durch die Pfeilspitze gegeben
ist.
In einem willkürlich gewählten Koordinatensystem, mit
Ursprung am Pfeilende, kann jeder Vektor durch seine drei
Komponenten (rx, ry, rz) (Projektionen auf die Achsen)
eindeutig beschrieben werden.
Länge/Betrag:
r rx ry rz
2
2
2
Zwei Vektoren sind gleich, falls sie in Betrag und Richtung
übereinstimmen.
Vektoroperationen
a1 a2
a1 a2 a1x a2 x , a1 y a2 y
a1 a2
3 a1 a1 a1 a1
a1 a2 a1x a2 x , a1 y a2 y
Eine skalare Größe (z.B. Komponenten ai eines Vektors, die
Zeit, Masse…) wird in der Physik allein durch die Angabe eines
Zahlenwertes und die entsprechende Einheit charakterisiert.
Die Zeit
Die Zeit beschreibt die Abfolge von Ereignissen. Sie hat
also im Gegensatz zu anderen physikalischen Größen eine
eindeutige, unumkehrbare Entwicklungsrichtung.
Eine Uhr ist eine Vorrichtung, die periodisch ablaufenden
Vorgänge
zählt
(Erdbewegung,
Pendel,
atomare
Schwingungen)
In einem abgeschlossenen System kann mit Hilfe der
physikalischen Prinzipien der Thermodynamik die Richtung,
als Zunahme der Entropie, d.h. Zunahme der Unordnung
bestimmt werden.
Die SI-Einheit der Zeit ist die Sekunde, s. Formelzeichen: t
Einleitung
Eine Klassifizierung wird meist danach unternommen, ob
die für die Bewegung ursächlichen physikalische Kräfte
mit betrachtet werden oder die Bewegung nur
beschrieben wird.
Beschreibung von Bewegungen,
Kinematik
(Wir fragen nicht nach der Ursache der Bewegung, wir
beschreiben die Bewegung nur.)
Bewegung, Weg, Strecke
Als Bewegung im physikalischen Sinne versteht man die
Änderung des Ortes eines Beobachtungsobjektes
(Massenpunktes) mit der Zeit r(t).
Weg : Vektor
r(t2-t1)
r(t2-t1)
r(t1)
r(t2)
Die SI-Einheit der
Länge ist das Meter, m.
Formelzeichen: s, l
Strecke : Länge s
des Vektors,
r(t2-t1), Skalar
Geschwindigkeit
Die Geschwindigkeit gibt an, welche Wegstrecke ein
Massepunkt innerhalb einer bestimmten Zeitspanne
zurücklegt.
Mittlere Geschwindigkeit:
r(∆t)/(t2-t1)
r(t1)
r(t2)
Die SI-Einheit der
Geschwindigkeit ist,
m/s. Formelzeichen: v
V=∆s/∆t
Bei der physikalischen
Größe wird auch die
Richtung der Bewegung
miterfasst.
Die Geschwindigkeit ist
eine vektorielle Größe.
Momentangeschwindigkeit
Durch reduzieren des Beobachtungszeitraumes Δt auf
einen verschwindend kleinen Zeitintervall dt entsteht ein
Grenzwert, den die Mathematik als Differentialquotienten oder Ableitung der Strecke nach der Zeit
nennt. Daraus resultiert die Momentangeschwindigkeit.
Die mittlere Steigung einer beliebigen
Funktion
Die lokale Steigung einer beliebigen
Funktion
Die erste Ableitung einer Funktion an der Stelle x0 gibt
die Steigung der Tangente an, die den Funktionsgraphen
im Punkt P0 (x0|y0) berührt und ist damit zugleich die
Steigung des Funktionsgraphen im Punkt P0 (x0|y0).
Man sagt auch Steigung der Funktion.
Beschleunigung
Ändert sich die Geschwindigkeit, dann findet eine Beschleunigung statt. Diese Bezeichnung
gilt auch, wenn die Geschwindigkeit sinkt.
Da eine Richtungsänderung zur
Änderung des Geschwindigkeitsvektors führt, liegt dem ebenfalls eine Beschleunigung zu
Grunde, ohne dass sich der
Betrag der Geschwindigkeit
ändern muss.
Die SI-Einheit der Beschleunigung ist,
m/s2. Formelzeichen: a
skalar
vektoriell
Gleichförmige geradlinige Bewegung
Eine
gleichförmige
geradlinige
Bewegung
liegt dann vor, wenn sich
ein Massenpunkt längs
einer
geraden
Bahn
ständig mit der gleichen
Geschwindigkeit bewegt,
wenn also gilt:
v = konstant
Gleichförmig
beschleunigte
geradlinige Bewegung
Eine gleichmäßig beschleunigte
Bewegung liegt vor, wenn sich
bei einem Massenpunkt der
Betrag der Geschwindigkeit in
jeweils gleichen Zeiten in
gleichem Maße ändert, wenn
also
der
Betrag
der
Beschleunigung konstant ist.
a = konstant
Gleichmäßige Kreisbewegung
Auf einer Kreisbahn durchläuft
ein Massenpunkt periodisch die
selbe Bahn immer wieder.
Die Koordinaten auf der Bahnkurve:
y(t) = r0(t) sin(φ(t))
x(t) = r0(t) cos(φ(t))
Betrag der Bahngeschwindigkeit:
V = ∆s/∆t
V = konstant
Betrag der Bahnbeschleunigung:
a = ∆v/∆t
a=0
Gleichmäßige Kreisbewegung,
eine beschleunigte Bewegung
Die Richtung der Bahngeschwindigkeit V
ist tangential und ändert ihre Richtung
damit von Punkt zu auf der Kreisbahn.
Radiale Beschleunigung:
Zentripetalbeschleunigung mit Betrag:
a = v2/r = rω2
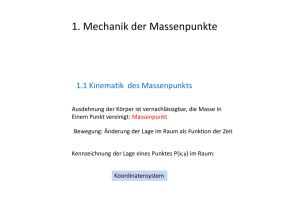
Polarkoordinatensystem für
Kreisbewegungen von Massenpunkten
Unter einem Polarkoordinatensystem versteht man ein
zweidimensionales Koordinatensystem, in dem jeder
Punkt auf einer Ebene durch einen Winkel φ und einen
Abstand r definiert werden kann.
Polarkoordinatensystem
Kartesisches
Koordinatensystem
Ebene Polarkoordinaten (mit Winkelangaben in Grad)
und ihre Transformation in kartesische Koordinaten
Kreisbewegung, Winkelgeschwindigkeit
Die Winkelgeschwindigkeit ω gibt an, wie schnell sich ein
Winkel φ mit der Zeit um eine Achse ändert.
ω=v/r
v=ωr
Bei konstanten Winkelgeschwindigkeiten ω ändert
sich die Bahngeschwindigkeit v mit dem Radius r.
Die SI-Einheit der Winkelgeschwindigkeit ist rad/s. Formelzeichen: ω
Harmonische Vorgänge
(Siehe auch spätere Vorlesungen)
Punkt auf dem Radumfang im Laborsystem. Projektion
π/3
π/6
0
Federpendel
Kräfte und ihre Wirkung,
Dynamik
Die physikalische Kraft
Die physikalische Kraft F ist eine gerichtete Größe (Vektor)
und ist die Ursache der Beschleunigung von Gegenständen
(Massenpunkten).
F=ma
m = Masse
a = Beschleunigung
Einige Kräfte haben eigenständige Bezeichnungen aufgrund
ihrer Ursachen oder Wirkungen erhalten. Dazu gehören
z.B. die Gewichtskraft, die Reibungskraft oder die
Fliehkraft.
Die SI-Einheit der Kraft ist der Newton, N. Formelzeichen: F
Kräfte und lineare Bewegungen
Gravitationskraft FG oder auch Gewichtskraft G
m2
g 2
d
m2 Erdmasse
m1 m2
FG
2
d
G m1 g
mit
m1 Probekörpermasse
d Entfernung
s
g 2
t
2
g = Erdbeschleunigung, g ist keine
universelle Konstante, sondern auf
der Erdoberfläche nur annähernd
konstant.
-> Gleichmäßig beschleunigte Bewegung
Kräfte und lineare Bewegungen
Alle Körper fallen (ohne Reibung) gleich schnell.
Alle Körper erfahren die gleiche Beschleunigung:
g = Erdbeschleunigung (Gravitation) g ist keine universelle
Konstante, sondern auf der Erdoberfläche nur annähernd
konstant.
Die Sedimentation
Für Stoffe die in einem Medium nicht lösbar sind, hängt
ihr Sinkgeschwindigkeit von ihre Dichte ab. Die
Sinkgeschwindigkeit von Stoffen mit höhere Dichte ist
größer, als solche mit geringere Dichte.
Die Reibungskraft
Für die Beschreibung der Bewegung: Massenpunktbetrachtung!!
Für die Beschreibung der Reibung: Mikroskopische Betrachtung!!
FReib= μ FGewicht
Die Reibungskraft FR nimmt mit der
Gewichtskraft FG
oft annähernd
linear und unabhängig von der Größe
der Kontaktfläche zu.
Haftreibung ist die Kraft FH,max, die
mindestens benötigt wird, um einen
Körper auf einem festen Untergrund
aus der Ruhe in Bewegung zu setzen.
Gleitreibung ist die Kraft FGR, die zur
Erhaltung der gleichförmigen Bewegung notwendig ist.
FHaft > FGleit
Impuls
Der Impuls (Bewegungsmenge) beschreibt die Bewegung
eines massebehafteten Körpers. Anschaulich entspricht der
Impuls ungefähr der „Wucht“, die beispielsweise bei einem
Verkehrsunfall zwischen LKW und PKW zu Tage tritt.
p = m v
Der Impuls ist eine Vektorgröße, hat also einen Betrag und
weist in die Richtung der Bewegung.
Die SI-Einheit des Impulses ist der kgm/s. Formelzeichen: p
Impulserhaltung
Die besondere Bedeutung liegt
darin, dass der Impuls eine
Erhaltungsgröße ist.
p = m v
Jeder bewegliche Körper kann
seinen Impuls, etwa bei einem
Stoßvorgang, ganz oder teilweise auf andere Körper übertragen oder von anderen Körpern übernehmen.
Grundgesetze der Dynamik
Newtonsche Gesetze
N1: „Ein Körper verharrt im Zustand der Ruhe oder der
gleichförmigen Translation, sofern er nicht durch einwirkende
Kräfte zur Änderung seines Bewegungszustands gezwungen wird.“
N2: „Die Änderung der Bewegung einer Masse ist der Einwirkung
der bewegenden Kraft proportional und geschieht nach der
Richtung derjenigen geraden Linie, nach welcher jene Kraft wirkt.“
N3: „Kräfte treten immer paarweise auf. Übt ein Körper A auf
einen anderen Körper B eine Kraft aus (actio), so wirkt eine gleich
große, aber entgegen gerichtete Kraft von Körper B auf Körper A
(reactio).“
N4: „Wirken auf einen Punkt (oder einen starren Körper) mehrere
Kräfte F1, F2, F3,…,Fn , so addieren sich diese vektoriell zu
einer resultierenden Kraft Fges= F1+F2+F3+…+Fn
auf.“
Die mechanische Arbeit
Arbeit W wird verrichtet, wenn eine Kraft F entlang
eines Weges ∆r auf einen Körper wirkt.
Arbeit ist im einfachsten Fall das Produkt aus der in Wegrichtung wirkenden konstanten Kraft und der Wegstrecke.
W = F ∆r =F ∆s cosα
F
α
Fcosα
∆r
Die SI-Einheit der Arbeit ist das Joule, J. Formelzeichen: W
Die mechanische Arbeit
W = F ∆r =F ∆r cosα
F
α
Fcosα
∆r
Für Kräfte, die sich entlang des Weges ändern:
F(s)ds
B
B
A
A
WAB F ( s) s F ( s) ds
Mechanische Arbeit und Energie
Arbeit ist mechanisch übertragene Energie – in diesem
Zusammenhang spricht man auch von der Energie als
gespeicherte Arbeit.
‚Energie eines Systems ist die Fähigkeit Arbeit
zu verrichten.‘
Die SI-Einheit der Energie ist das Joule, J. Formelzeichen: E
Die kinetische und potentielle Energie
Die potentielle Energie:
Potentielle Energie EPot, auch Lageenergie genannt, kommt
einem Körper durch seine Lage in einem Kraftfeld zu. In
einem Gravitationsfeld ist sie proportional zu der Masse
m des Körpers der Gravitationsbeschleunigung g der Höhe
h über dem Ursprung des Koordinatensystems
Die kinetische Energie:
Die kinetische Energie Ekin ist diejenige Energie, die dem
Bewegungszustand eines Körpers innewohnt.
Epot = m g h
m
v
Ekin=1/2mv2
Energieerhaltungssatz
die Gesamtenergie eines abgeschlossenen Systems
ändert sich nicht mit der Zeit.
Energie kann zwischen verschiedenen Energieformen
umgewandelt werden, beispielsweise von Bewegungsenergie
in Wärme. : Die Energie ist eine Erhaltungsgröße.
Für die Mechanik bedeutet es:
Ekin + Epot = const
Leistung
Die Leistung P ist der Quotient aus verrichteter Arbeit
ΔW oder dafür aufgewendeter Energie ΔE und der dazu
benötigte Zeit Δt :
ΔW = FΔ s
ΔWWalker = ΔWBeam
ΔtWalker = 4ΔtBeam
4 PWalker =
PBeam
Die SI-Einheit der Leistung ist das Watt. Formelzeichen: P
Drehbewegung: Zentrifugalkraft
Auf einem mit der Winkelgeschwindigkeit ω rotierenden Massenpunkt der Masse m der sich in einem Abstand r von der Drehachse
sich befindet, wirkt eine Zentrifugalkraft
F = m ω2 r
F ist stets von der Drehachse weg, nach
außen gerichtet. Dies ist ein Spezialfall
der allgemeinen Trägheitskraft.
Die Zentrifugalbeschleunigung ω2 r eines Körpers ist vom
Abstand r des Körpers von der Drehachse und von der
Winkelgeschwindigkeit ω abhängig. Sie steigt linear mit dem
Abstand von der Drehachse. Außerdem steigt sie quadratisch
mit der Winkelgeschwindigkeit oder der Drehzahl.
Das Trennen in der Zentrifuge
Zentrifugen nutzen die Massenträgheit
im
Zentrifugiergutraum
zur
Stofftrennung. Partikel oder Medien mit
höherer Dichte wandern aufgrund der
höheren Trägheit nach außen. Dabei
verdrängen sie die Bestandteile mit
niedrigerer Dichte, die hierdurch zur
Mitte gelangen. Der Prozess ist
gegenüber der Sedimentation durch die
Schwerkraft wesentlich schneller oder
wird überhaupt erst möglich.
Das Trennen in der Zentrifuge
Die Beschleunigung a ist von der Dichte der Stoffe
unabhängig. Jedoch ist die Zentrifugalkraft umso größer,
je höher die Dichte des Stoffs ist. Die Stofftrennung
erfolgt aufgrund der Dichteunterschiede.
Einfache Mechanische
Maschinen
Unter einfacher Maschine versteht man in der
Technischen
Mechanik
eine
Vorrichtung,
welche
Ansatzpunkt, Richtung oder Größe einer Kraft verändert,
um die vorhandene Kraft möglichst zweckmäßig zur
Verrichtung von Arbeit einzusetzen.
Bis heute besteht praktisch jede mechanische Maschine
aus einer Kombination von einfachen Maschinen.
Drehmoment
M = r F sinφ
d = r sinφ
(d = Wirksamer Hebelarm)
M = F d
Hier im Beispiel nur ein Rotationsfreiheitsgrad!!!
Keine Translationsfreiheitsgrade!
Das Drehmoment spielt für Drehbewegungen die gleiche
Rolle wie die Kraft für die geradlinige Bewegung.
Ein Drehmoment kann die Rotation eines Körpers
beschleunigen oder bremsen.
Die SI-Einheit des Drehmoments ist das Nm. Formelzeichen: M
Einfache mechanische Maschinen
Der Hebel
Die zentrale physikalische
Größe, die zur Beschreibung
eines Hebels benötigt wird,
ist das Drehmoment.
Der
Betrag des Drehmoments ist proportional zum
Kraft- bzw. Hebelarm. Mit
einem großen Hebelarm kann
daher mit einer kleinen Kraft
eine großes Drehmoment
ausgeübt werden.
Einfache mechanische Maschinen
Der Umlenkrolle
Mit einer losen
Rolle lässt sich
eine Last mit dem
halben Kraftaufwand heben. Die
Länge des über die
Rolle zu ziehenden
Seils
ist dabei
doppelt so lang wie
der Hubweg.
Einfache mechanische Maschinen
Die schiefe Ebene
Einfache mechanische Maschinen
Die Schraube, Presse
Einfache mechanische Maschinen
Der Keil
Das mechanische Prinzip eines
Keiles geht auf das Prinzip
der schiefen Ebene zurück
Die in Richtung der Keilspitze
bzw. der „Schneide“ wirkende
Kraft wird danach neben der
vorwärtsgerichteten
Kraft
auch in eine im rechten
Winkel
dazu
wirkende
Teilkraft zerlegt.
Zusammenfassung
• Einleitung
• Beschreibung von Bewegungen, Kinematik
• Kräfte und ihre Wirkung, Dynamik
• Mechanik starrer Körper
• Einfache mechanische Maschinen
Literatur
• Vorlesungsskript (http://www3.szote.u-szeged.hu/dmi/ger/)
• Lehrbücher über Mechanik
• Internet…
Übung für Seminartests in Physik
Die Teilnahme an den „Übungen für Seminartests“ wird
dringend empfohlen. Sie ist aber freiwillig.
Mittwochs 18:00 – 19:30;
Hetényi Géza Vorlesungssaal,
1. Internistische Klinik (1. Belgyógyászati klinika)
Straße:
Korányi fasor 8-10. ,
Stadt:
6720 Szeged
Start, dieser Woche 14.09.2016 mit den Gruppen:
3, 4, 6, 8, 10.