Physik 1 HAW Hamburg
Werbung

Physik 1
Mechanik und Wärmelehre
Thomas Klinker
Hochschule für Angewandte Wissenschaften Hamburg
2009
Inhaltsverzeichnis
1 Grundbegriffe
5
2 Bewegung in einer Dimension
2.1 Weg-Zeit-Diagramme . . . . . . . . . . . . . .
2.2 Durchschnittsgeschwindigkeit . . . . . . . . .
2.3 Momentangeschwindigkeit . . . . . . . . . . .
2.4 Beschleunigung . . . . . . . . . . . . . . . . .
2.5 Die Bewegung mit konstanter Beschleunigung
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3 Bewegung im dreidimensionalen Raum
3.1 Geschwindigkeit und Beschleunigung . . . . . . . . .
3.2 Der schiefe Wurf . . . . . . . . . . . . . . . . . . . .
3.3 Kreisbewegungen . . . . . . . . . . . . . . . . . . . .
3.3.1 Winkelgeschwindigkeit, Winkelbeschleunigung
3.3.2 Ebene Polarkoordinaten . . . . . . . . . . . .
3.3.3 Gleichförmige Kreisbewegung . . . . . . . . .
3.3.4 Ungleichförmige Kreisbewegung . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Kraft und Bewegung
4.1 Die NEWTONschen Axiome . . . . . . . . . . . . . . . . . . .
4.2 Federkraft und Kraftmesser . . . . . . . . . . . . . . . . . . .
4.3 Die Gravitationskraft . . . . . . . . . . . . . . . . . . . . . . .
4.4 Reibungskräfte . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5 Die Trägheitskräfte in Nicht-Inertialsystemen . . . . . . . . . .
4.5.1 Beschleunigte Translationsbewegung ausführende Bezugssysteme . . . . . . . . . . . . . . . . . . . . . . . .
4.5.2 Rotierende Bezugssysteme . . . . . . . . . . . . . . . .
.
.
.
.
.
9
9
10
11
11
12
.
.
.
.
.
.
.
17
17
20
22
22
23
25
26
.
.
.
.
.
27
27
31
32
34
38
. 39
. 42
5 Arbeit und Energie
55
5.1 Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
1
2
5.2
5.3
5.4
5.5
Kinetische Energie
Potentielle Energie
Der Energiesatz . .
Leistung . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6 Impuls und Stoß
6.1 Der Schwerpunkt eines Teilchensystems
6.2 Der Impuls . . . . . . . . . . . . . . .
6.3 Der Impulssatz . . . . . . . . . . . . .
6.4 Elastischer und unelastischer Stoß . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
59
60
65
66
.
.
.
.
69
69
70
71
74
7 Drehimpuls und Planetenbewegung
79
7.1 Die Erhaltung des Drehimpulses . . . . . . . . . . . . . . . . . . 79
7.2 Die Planetenbewegung und die KEPLERschen Gesetze . . . . . 82
8 Dynamik des starren Körpers
8.1 Der Drehimpulssatz für ein Teilchensystem . . . . . . .
8.2 Drehbewegung des starren Körpers um eine feste Achse
8.3 Berechnung von Trägheitsmomenten . . . . . . . . . .
8.4 Beispiele zur Drehbewegung des starren Körpers . . . .
8.5 Lagermomente bei der Drehung um eine feste Achse . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
93
93
95
100
106
109
9 Die Temperatur und der Begriff des idealen Gases
113
9.1 Die Temperatur . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
9.2 Die Zustandsgleichung des idealen Gases . . . . . . . . . . . . . 117
10 Kinetische Gastheorie
121
11 Wärme, Wärmekapazität und Wärmeleitung
11.1 Wärme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.2 Spezifische und molare Wärmekapazität . . . . . . . . . . . .
11.3 Wärmeleitung . . . . . . . . . . . . . . . . . . . . . . . . . . .
129
. 129
. 130
. 133
12 Der
12.1
12.2
12.3
12.4
12.5
139
. 139
. 142
. 143
. 146
. 147
. 147
. 148
erste Hauptsatz der Thermodynamik
Der erste Hauptsatz der Thermodynamik . . .
Die innere Energie eines idealen Gases . . . .
Die molare Wärmekapazität des idealen Gases
Die molare Wärmekapazität von Festkörpern .
Zustandsänderungen idealer Gase . . . . . . .
12.5.1 Isochore Zustandsänderung, dV = 0 . .
12.5.2 Isobare Zustandsänderung, dp = 0 . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
12.5.3 Isotherme Zustandsänderung, dT = 0 . . . . . . . . . . . 149
12.5.4 Adiabatische Zustandsänderung, dQ = 0 . . . . . . . . . 150
12.6 Der CARNOTsche Kreisprozeß . . . . . . . . . . . . . . . . . . 152
13 Der
13.1
13.2
13.3
13.4
zweite Hauptsatz der Thermodynamik
Der zweite Hauptsatz der Thermodynamik . . . .
Die Entropie . . . . . . . . . . . . . . . . . . . . .
Zunahme der Entropie im abgeschlossenen System
Statistische Deutung der Entropie . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
157
. 157
. 161
. 163
. 166
A Aufgaben mit Lösungen
B Vektoren
B.1 Definition von Vektoren . . . .
B.2 Addition von Vektoren . . . . .
B.3 Multiplikation eines Vektors mit
B.4 Vektoren im Koordinatensystem
B.5 Das Skalarprodukt . . . . . . .
B.6 Das Vektorprodukt . . . . . . .
B.7 Mehrfachprodukte . . . . . . .
169
. . . . . . . .
. . . . . . . .
einem Skalar
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
191
191
192
193
193
195
196
197
C Literaturverzeichnis
199
D Physikalische Konstanten
201
E Das Griechische Alphabet
203
4
Kapitel 1
Grundbegriffe
Die Physik basiert auf Messungen. Dabei geht es darum, meßbare Eigenschaften physikalischer Objekte, Zustände oder Vorgänge zu bestimmen. Beispiele
für solche meßbaren Eigenschaften sind Länge, Zeit, Masse, Temperatur, elektrische Spannung oder elektrische Stromstärke. Man spricht in allen diesen
Fällen von physikalischen Größen. Die Messung einer physikalischen Größe erfolgt durch Vergleich mit einer Einheit. Das Ergebnis der Messung einer physikalischen Größe G ist somit anzugeben als Produkt aus einem Zahlenwert
{G} und einer Einheit [G]
G = {G} [G] .
Beispiel: t = 15 s .
Die physikalischen Größen werden unterteilt in Basisgrößen und daraus
abgeleitete Größen. Zu jeder Basisgröße gehört eine Basiseinheit, die durch
eine bestimmte Vorschrift definiert ist. Im Internationalen Einheitensystem
(SI) sind sieben Basisgrößen mit den dazugehörigen Einheiten festgelegt, siehe
Tab. 1.1.
Basisgröße
Länge
Masse
Zeit
elektr. Stromstärke
thermodyn. Temperatur
Lichtstärke
Stoffmenge
Basiseinheit
Meter
Kilogramm
Sekunde
Ampere
Kelvin
Candela
Mol
Symbol
m
kg
s
A
K
cd
mol
Tabelle 1.1: Basisgrößen und Basiseinheiten im Internationalen Einheitensystem (SI)
5
6
1 Grundbegriffe
Die 17. Generalkonferenz für Maße und Gewichte hat 1983 folgende Definitionen für die Basiseinheiten Meter , Sekunde und Kilogramm festgelegt:
Das Meter ist die Länge der Strecke, die Licht im Vakuum
während des Zeitintervalls (1/299 792 458) s durchläuft.
Damit ist die Einheit Meter über die Festlegung des Wertes der Lichtgeschwindigkeit im Vakuum
c0 = 299 792 458 m/s
an die Definition der Zeiteinheit Sekunde gekoppelt. Für diese gilt die Definition:
Die Sekunde ist das 9 192 631 770 - fache der Schwingungsdauer einer elektromagnetischen Welle, die von Cäsium133-Atomen beim Übergang zwischen den beiden Hyperfeinstrukturniveaus des Grundzustandes ausgestrahlt
wird.
Für die Einheit der Masse, das Kilogramm, gilt:
Ein Kilogramm ist die Masse eines im Internationalen
Büro für Maße und Gewichte aufbewahrten Normkörpers
aus einer Platin-Iridium-Legierung.
Physikalische Größen, die sich als Funktion von Basisgrößen darstellen lassen, heißen abgeleitete physikalische Größen. So ist beispielsweise die Geschwindigkeit v definiert als Quotient aus dem zurückgelegten Weg x und der
dafür benötigten Zeit t, also v = x/t. Damit ergibt sich als Einheit für die
Geschwindigkeit: [v] = [x]/[t] = m/s.
Im Internationalen Einheitensystem sind weiter für Vielfache und Bruchteile einer Basiseinheit bestimmte Vorsätze mit den dazugehörigen Symbolen
festgelegt worden, siehe Tab. 1.2.
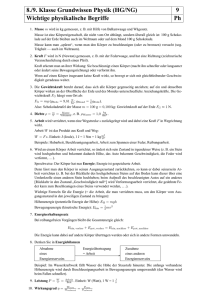
Zur Beschreibung von Drehbewegungen oder Pendelbewegungen physikalischer Systeme benötigt man den Winkel. Der Winkel ist dabei wie folgt definiert. Man betrachte zwei sich schneidende Geraden und lege einen Kreis mit
dem Radius r um den Schnittpunkt, siehe Abb. 1.1. Der Winkel ϕ im Bogenmaß ist dann definiert durch das Verhältnis der aus dem Kreis geschnittenen
Bogenlänge s und dem Radius r, in Zeichen
ϕ :=
s
.
r
7
Faktor
1018
1015
1012
109
106
103
102
101
Vorsatz
ExaPetaTeraGigaMegaKiloHektoDeka-
Symbol
E
P
T
G
M
k
h
da
Faktor
10−18
10−15
10−12
10−9
10−6
10−3
10−2
10−1
Vorsatz
AttoFemtoPikoNanoMikroMilliZentiDezi-
Symbol
a
f
p
n
µ
m
c
d
Tabelle 1.2: Vorsätze im Internationalen Einheitensystem (SI)
Winkel im Gegenuhrzeigersinn werden positiv gezählt (mathematisch positiver Drehsinn), Winkel im Uhrzeigersinn werden negativ gezählt (mathematisch
negativer Drehsinn). Gemäß der Definition ist ein Winkel eigentlich dimensionslos. Die Angabe eines Winkels im Bogenmaß wird aber häufig durch die
Einheit Radiant (Einheitszeichen: rad) gekennzeichnet, um von dem Gradmaß
zu unterscheiden. Beim Gradmaß (Einheitszeichen: ◦ ) wird der Halbkreis in
180◦ geteilt. Da der Halbkreis im Bogenmaß π rad ist, ergibt sich die Umrechnungsformel
!
1800
0
Winkel in =
Winkel in rad .
π rad
s
ϕ
r
Abbildung 1.1: Definition des Winkels ϕ
8
1 Grundbegriffe
Kapitel 2
Bewegung in einer Dimension
Wir wollen im folgenden die Bewegung eines Teilchens in einer Raumdimension, also entlang einer geraden Linie, betrachten. Zur Beschreibung einer solchen Bewegung benötigt man Weg-Zeit-Diagramme. Dieser Begriff wird im ersten Abschnitt erläutert. Danach werden die physikalischen Größen Geschwindigkeit und Beschleunigung definiert. Am Schluß des Kapitels wird die Bewegung mit konstanter Beschleunigung betrachtet.
2.1
Weg-Zeit-Diagramme
Zur Beschreibung der Lage eines Teilchens entlang einer geraden Linie benötigen wir zunächst eine Koordinatenachse. Dies wird im folgenden die x-Achse
x
6
-
t
Abbildung 2.1: Bewegung eines Teilchens in einer Raumdimension, dargestellt
in einem Weg-Zeit-Diagramm
9
10
2 Bewegung in einer Dimension
sein mit einem irgendwo markierten Nullpunkt. Wenn ein Teilchen sich entlang der Achse bewegt, bedeutet dies, daß sich die x-Koordinate mit der Zeit
t ändert. Auf diese Weise erhält man die Weg-Zeit-Funktion x(t). Die Darstellung von x(t) erfolgt in sogenannten Weg-Zeit-Diagrammen. In der Abb. 2.1
ist ein Bewegungsverlauf als Beispiel dargestellt.
2.2
Durchschnittsgeschwindigkeit
Die nächste Frage ist: Wie schnell bewegt sich das Teilchen ?“ Dazu betrach”
ten wir noch einmal ein beliebiges Weg-Zeit-Diagramm, dargestellt in Abb. 2.2.
x 6
x2
∆x
x1
∆t
-
t1
t2
t
Abbildung 2.2: Definition der Durchschnittsgeschwindigkeit
Wir nehmen an, das Teilchen befinde sich zur Zeit t1 am Orte x1 und zur
Zeit t2 am Orte x2 . Der zurückgelegte Weg ist dann
∆x = x2 − x1 ,
und die dafür benötigte Zeit ist
∆t = t2 − t1 .
Die Durchschnittsgeschwindigkeit v̄ wird nun definiert als der Quotient aus
zurückgelegtem Weg ∆x und der dafür benötigten Zeit ∆t, in Zeichen
v̄ :=
x2 − x1
∆x
=
.
t2 − t1
∆t
(2.1)
11
2.3 Momentangeschwindigkeit
2.3
Momentangeschwindigkeit
Aus Abb. 2.2 ist ersichtlich, daß die Durchschnittsgeschwindigkeit nichts aussagt über den genauen Bewegungsverlauf zwischen den Zeiten t1 und t2 . Um
die Geschwindigkeit zu einem Zeitpunkt t zu erfassen, betrachtet man die
Bewegung zwischen den Zeiten t und t + ∆t und den dazugehörigen Orten
x(t) und x(t + ∆t). Der zurückgelegte Weg ist ∆x = x(t + ∆t) − x(t). Die
Momentangeschwindigkeit v ist definiert als der Grenzwert, dem die Durchschnittsgeschwindigkeit, gemessen über dem Zeitintervall ∆t, zustrebt, wenn
man das Zeitintervall ∆t gegen 0 streben läßt. In einer Formel ausgedrückt
∆x
.
∆t→0 ∆t
v := lim
(2.2)
Der Grenzwert auf der rechten Seite der Gl. (2.2) ist aus der Mathematik
bekannt als die Ableitung der Funktion x(t) nach der Zeit t. Man schreibt
dafür auch kurz dx
oder ẋ, so daß sich ergibt
dt
v=
dx
= ẋ .
dt
(2.3)
Die Momentangeschwindigkeit v(t) ist also graphisch nichts anderes als die
Steigung der Weg-Zeit-Funktion x(t) zum Zeitpunkt t. v > 0 bedeutet eine
Zunahme der x-Werte, also eine Bewegung in Richtung der positiven x-Achse,
v < 0 bedeutet eine Abnahme der x-Werte, also eine Bewegung in Richtung
der negativen x-Achse.
Im folgenden werden wir die Durchschnittsgeschwindigkeit selten gebrauchen und für die Momentangeschwindigkeit kurz den Begriff Geschwindigkeit
verwenden.
Die Einheit der Geschwindigkeit ergibt sich aus der Definition zu
[v] =
2.4
[x]
m
=
.
[t]
s
Beschleunigung
Um bei der Bewegung eines Teilchens die Änderung des Ortes mit der Zeit zu
erfassen, haben wir die Geschwindigkeit definiert. Ganz analog wird, um die
Änderung der Geschwindigkeit mit der Zeit zu erfassen, die Beschleunigung
definiert.
Wir nehmen an, ein Teilchen habe zur Zeit t1 die Geschwindigkeit v1 und
zur Zeit t2 die Geschwindigkeit v2 . Die Änderung der Geschwindigkeit ist ∆v =
12
2 Bewegung in einer Dimension
v2 − v1 . Analog zu Gl. (2.1) ist die Durchschnittsbeschleunigung definiert durch
ā :=
∆v
v2 − v1
=
.
t2 − t1
∆t
(2.4)
Sei v(t) die Geschwindigkeit eines Teilchens zur Zeit t und v(t + ∆t) die Geschwindigkeit zur Zeit t + ∆t. Die Änderung der Geschwindigkeit ergibt sich
dann zu ∆v = v(t + ∆t) − v(t). Analog zu Gl. (2.2) ist die Momentanbeschleunigung oder kurz Beschleunigung definiert durch
dv
∆v
=
= v̇ .
∆t
dt
Die Beschleunigung a ist die Ableitung der Geschwindigkeit v nach der Zeit
t. Die Beschleunigung a(t) gibt die Steigung der Geschwindigkeit-Zeit-Funktion
v(t) zur Zeit t an. Für positive Geschwindigkeiten, d.h. v > 0, bedeutet a > 0
eine Zunahme der Geschwindigkeit, also ein Schnellerwerden, während a < 0
eine Abnahme der Geschwindigkeit, also ein Abbremsen, bedeutet.
Zusammen mit Gl. (2.3) folgt
a := lim
∆t→0
a=
d2 x
= ẍ .
dt2
Die Beschleunigung ist die zweite Ableitung der Weg-Zeit-Funktion x(t) nach
der Zeit.
Für die Einheit der Beschleunigung ergibt sich aus der Definition
[a] =
2.5
m
[v]
= 2 .
[t]
s
Die Bewegung mit konstanter Beschleunigung
Eine in der Praxis häufig vorkommende Bewegungsform ist die Bewegung
mit konstanter Beschleunigung. Wenn die Beschleunigung a konstant ist, sind
Durchschnittsbeschleunigung ā und Momentanbeschleunigung a identisch. Aus
Gl. (2.4) gewinnen wir somit
a=
v − v0
.
t−0
Hierbei ist v0 die Geschwindigkeit zur Zeit t = 0 und v die Geschwindigkeit zu
irgendeiner Zeit t. Damit ergibt sich
v = v0 + at .
(2.5)
2.5 Die Bewegung mit konstanter Beschleunigung
13
Als nächstes wollen wir herleiten, wie sich der Ort x des Teilchens mit der
Zeit ändert. Für den Ort x zu irgendeiner Zeit t können wir schreiben
x = x0 + v̄t ,
(2.6)
wobei x0 der Ort des Teilchens zur Zeit t = 0 ist und v̄ die Durchschnittsgeschwindigkeit zwischen t = 0 und t.
Aus Gl. (2.5) sowie auch aus Abb. 2.3 ergibt sich für die Durchschnittsgeschwindigkeit im Zeitintervall von t = 0 bis t
1
v̄ = (v0 + v) .
2
(2.7)
Wenn wir v gemäß Gl. (2.5) in obige Gl. (2.7) einsetzen, ergibt sich
1
v̄ = v0 + at .
2
(2.8)
Setzt man dies in Gl. (2.6) ein, so folgt
1
x = x0 + v0 t + at2
2
(2.9)
für die Weg-Zeit-Funktion x(t). In Abb. 2.3 sind der Ort x(t), die Geschwindigkeit v(t) und die Beschleunigung a(t) für eine Bewegung mit konstanter
Beschleunigung aufgetragen. Löst man Gl. (2.5) nach der Zeit auf und setzt
dann in Gl. (2.9) ein, so ergibt sich
v 2 = v02 + 2a(x − x0 ) .
(2.10)
Auf diese Weise erhalten wir die Geschwindigkeit v, genauer deren Quadrat,
als Funktion des Ortes x. Obige Gleichung läßt sich auch in folgender Form
schreiben
v 2 − v02
x − x0 =
,
(2.11)
2a
was die Berechnung von Bremswegen und Beschleunigungsstrecken ermöglicht.
Ein wichtiger Spezialfall der Bewegung mit konstanter Beschleunigung ist
der Freie Fall in der Nähe der Erdoberfläche. Verwendet man eine nach oben
orientierte x-Achse, so unterliegt ein Gegenstand der konstanten Erdbeschleunigung a = −g, g = 9, 81 m/s2 . Für die Geschwindigkeit als Funktion der Zeit
folgt
v = v0 − gt ,
(2.12)
14
2 Bewegung in einer Dimension
x
6
-
t
v
6
-
t
a
6
-
t
Abbildung 2.3: Der Ort x(t), die Geschwindigkeit v(t) und die Beschleunigung
a(t) für die Bewegung eines Teilchens mit konstanter Beschleunigung
2.5 Die Bewegung mit konstanter Beschleunigung
15
und für den Ort als Funktion der Zeit gilt
1
x = x0 + v0 t − gt2 .
2
(2.13)
Beispiel : Jemand wirft bei der Anfangshöhe x0 = 0 einen Gegenstand
mit der Geschwindigkeit v0 = 25 m/s senkrecht nach oben. Wie lange dauert
es, bis der Gegenstand den höchsten Punkt erreicht hat? Wie hoch fliegt er?
Aus Gl. (2.12) folgt mit v = 0 die Steigzeit T zu
T =
v0
= 2, 5 s .
g
Setzt man dies in Gl. (2.13) ein, so folgt für die Steighöhe H
H=
v02
= 32 m .
2g
Die Steighöhe hätte man auch direkt mit Gl. (2.11) bekommen können.
16
2 Bewegung in einer Dimension
Kapitel 3
Bewegung im dreidimensionalen
Raum
In diesem Kapitel werden im ersten Abschnitt die allgemeinen Formeln für
die Geschwindigkeit und die Beschleunigung abgeleitet für den Fall, daß sich
ein Teilchen auf einer beliebigen Bahn im dreidimensionalen Raum bewegt. In
den folgenden beiden Abschnitten werden zwei spezielle Bewegungen in einer
Ebene genau analysiert, der schiefe Wurf und die Bewegung eines Teilchens auf
einer Kreisbahn. Bei der Kreisbewegung sind zwei Typen zu unterscheiden, die
gleichförmige und die ungleichförmige Kreisbewegung.
3.1
Geschwindigkeit und Beschleunigung
Im dreidimensionalen Raum wird die Bahn eines Teilchens beschrieben durch
einen zeitabhängigen Ortsvektor der Form
~r (t) = x(t)~ex + y(t)~ey + z(t)~ez .
(3.1)
Zu jeder Zeit t gibt der Vektor ~r (t) die Lage des Teilchens an in einem kartesischen Koordinatensystem. In Abb. 3.1 ist eine solche Teilchenbahn dargestellt.
Zur Zeit t befinde sich das Teilchen am Punkt ~r (t) und zur Zeit t + ∆t am
Punkt ~r (t + ∆t). Der Vektor
∆~r = ~r (t + ∆t) − ~r (t)
gibt die Positionsänderung in der Zeit ∆t an. Ganz analog zur eindimensionalen
Bewegung ist die Geschwindigkeit ~v des Teilchens definiert durch
∆~r
.
∆t→0 ∆t
~v := lim
17
(3.2)
18
3 Bewegung im dreidimensionalen Raum
z
6
>
~
v ∆s
1
∆~
r
r (t)
~
~
r (t + ∆t)
* y
-
x
Abbildung 3.1: Bahn eines Teilchens im dreidimensionalen Raum
Für den Grenzwert auf der rechten Seite der Gl. (3.2) schreibt man wieder
r
kurz d~
oder ~r˙ , so daß sich ergibt
dt
~v =
d~r
= ~r˙ .
dt
Der Vektor ∆~r ist nach Abb. 3.1 die Sekante der Bahnkurve des Teilchens
r
zwischen den Punkten ~r (t) und ~r (t + ∆t). Der Vektor ∆~
ist mit ∆~r rich∆t
1
tungsgleich, aber um den Faktor ∆t gestreckt. Strebt ∆t gegen 0, so nähert
sich der Punkt ~r (t + ∆t) dem Punkt ~r (t) und damit die Sekante der Tangenr
te im Punkt ~r (t). Das bedeutet aber, auch der Vektor ∆~
nähert sich immer
∆t
mehr der Tangente an die Bahnkurve im Punkt ~r (t). Damit ergibt sich, daß
der Vektor der Geschwindigkeit ~v (t) tangential an die Bahn gerichtet ist im
Punkt ~r (t). Dies ist in Abb. 3.1 ebenfalls dargestellt.
Daß der Vektor ~v (t) die Geschwindigkeit des Teilchens zur Zeit t angibt,
ergibt sich schließlich daraus, daß im Grenzübergang ∆t → 0 die Länge ∆r
der Sekante beliebig genau mit der Länge ∆s des tatsächlich zurückgelegten
Weges übereinstimmt (siehe Abb. 3.1).
Um Geschwindigkeiten einfach berechnen zu können, empfiehlt es sich, zur
Komponentendarstellung der Vektoren überzugehen. Nimmt man die Komponentendarstellung des Vektors ~r (t) gemäß Gl. (3.1) und setzt diese in Gl. (3.2)
ein, so ergibt sich
3.1 Geschwindigkeit und Beschleunigung
19
∆~r
∆t→0 ∆t
~r (t + ∆t) − ~r (t)
= lim
∆t→0
∆t
)
(
y(t + ∆t) − y(t)
z(t + ∆t) − z(t)
x(t + ∆t) − x(t)
~ex +
~ey +
~ez
= lim
∆t→0
∆t
∆t
∆t
= ẋ(t)~ex + ẏ(t)~ey + ż(t)~ez .
~v =
lim
Wir erhalten also für den Vektor der Geschwindigkeit
~v = vx~ex + vy~ey + vz~ez
= ẋ(t)~ex + ẏ(t)~ey + ż(t)~ez .
Die Differentiation eines Vektors nach der Zeit bedeutet also allgemein
nichts anderes, als daß jede Komponente nach der Zeit zu differenzieren ist.
Die Beschleunigung ~a ist auch hier wie bei der eindimensionalen Bewegung
definiert als die Ableitung der Geschwindigkeit ~v nach der Zeit t, also
d~v
∆~v
=
= ~v˙ .
∆t→0 ∆t
dt
Eine Rechnung ganz analog zur obigen liefert für den Vektor der Beschleunigung
~a := lim
~a = ax~ex + ay~ey + az~ez
= v˙x (t)~ex + v˙y (t)~ey + v˙z (t)~ez
= ẍ(t)~ex + ÿ(t)~ey + z̈(t)~ez .
Bemerkung : Wir haben oben gesehen, daß die Differentiation eines Vektors nach einem Parameter, z. B. der Zeit t, nichts anderes bedeutet, als daß
jede Komponente des Vektors nach dem Parameter differenziert werden muß.
Damit ist aber die Differentiation eines Vektors zurückgeführt auf die gewöhnliche Differentiation einer Funktion einer Variablen. Aus diesem Grund läßt
sich leicht nachrechnen, daß für die verschiedenen Produkte mit Vektoren,
die Multiplikation eines Vektors mit einem Skalar, das Skalarprodukt und das
Vektorprodukt dieselbe Produktregel gilt wie in der Differentialrechnung für
Funktionen einer Variablen.
Sei α(t) eine zeitabhängige skalare Größe, und seien ~a (t) und ~b (t) zwei
zeitabhängige vektorielle Größen, so gilt
d~b
dα ~
d ~
b+α
(α b) =
,
dt
dt
dt
20
3 Bewegung im dreidimensionalen Raum
d~b
d~a ~
d ~
b + ~a
(~a b) =
,
dt
dt
dt
d
d~a ~
d~b
(~a × ~b) =
× b + ~a ×
.
dt
dt
dt
3.2
Der schiefe Wurf
Der schiefe Wurf entsteht, wenn ein Gegenstand unter einem bestimmten Winkel θ0 abgeworfen wird und sich dann im Schwerefeld der Erde weiterbewegt.
Luftreibung und andere Einflüsse werden dabei der Einfachheit halber vernachlässigt. In Abb. 3.2 ist die Bahn des Gegenstandes für einen solchen Fall
dargestellt. Ihre genaue Form soll im folgenden berechnet werden.
y
6
~
v0
v0y
6
θ0
v0x
H
?
R
-
x
Abbildung 3.2: Die Parabelbahn eines Gegenstandes beim schiefen Wurf
Die Bewegung des Gegenstandes ergibt sich durch senkrechte Überlagerung
einer gleichförmigen Bewegung in x-Richtung und einer gleichmäßig beschleunigten Bewegung in y-Richtung. Die Beschleunigung in y-Richtung hat den
konstanten Wert ay = −g. Der Einfachheit halber legen wir den Abwurfpunkt
in den Koordinatenursprung. Der Vektor der Anfangsgeschwindigkeit ~v0 hat
die Komponenten
v0x = v0 cos θ0
und
v0y = v0 sin θ0 .
21
3.2 Der schiefe Wurf
Der Bewegungsverlauf in x-Richtung hat damit die Form
x = (v0 cos θ0 )t
(3.3)
und der Bewegungsverlauf in y-Richtung
1
y = (v0 sin θ0 )t − gt2 .
2
(3.4)
Durch Differentiation nach der Zeit gewinnen wir aus Gl. (3.3) und (3.4)
die Geschwindigkeit in x- und y-Richtung
vx = v0 cos θ0 ,
vy = v0 sin θ0 − gt .
(3.5)
(3.6)
Die Gleichung für die Bahnkurve bekommen wir, indem wir Gl. (3.3) nach
t auflösen und in Gl. (3.4) einsetzen. Das Resultat lautet
!
g
y = (tan θ0 )x −
x2 .
2(v0 cos θ0 )2
(3.7)
Dies ist die Gleichung der in Abb. 3.2 dargestellten Bahn. Es ist eine Parabel,
die wegen des negativen Vorzeichens vor x2 nach unten geöffnet ist. Die Bahn
wird deshalb auch Wurfparabel genannt.
Zur Ermittlung der Wurfweite R gehen wir aus von Gl. (3.7). Setzt man
in dieser Gleichung y = 0, so ist eine Lösung x = 0 (der Abwurfpunkt). Die
zweite Lösung, die man erhält, indem man zunächst durch x dividiert, liefert
gerade die Wurfweite x = R
R=
v2
2v02
sin θ0 cos θ0 = 0 sin 2θ0 .
g
g
Im höchsten Punkt der Bahnkurve ist die Geschwindigkeit in y-Richtung
Null. Aus Gl. (3.6) läßt sich somit die Steigzeit T ermitteln, indem man einfach
vy = 0 setzt. Es ergibt sich
v0 sin θ0
.
T =
g
Die Wurfhöhe H bekommt man, indem man die oben berechnete Steigzeit
T in Gl. (3.4) für t einsetzt. Denn die y-Koordinate der Bahnkurve zur Zeit T
ist gerade die Wurfhöhe. Es ergibt sich
H=
(v0 sin θ0 )2
.
2g
22
3.3
3.3.1
3 Bewegung im dreidimensionalen Raum
Kreisbewegungen
Winkelgeschwindigkeit, Winkelbeschleunigung
Zur Beschreibung einer Drehbewegung benötigt man den Winkel. Die genaue
Definition des Winkels ist in Kapitel 1 dargestellt. Bei einer Drehbewegung ist
der Winkel ϕ eine Funktion der Zeit t. Die Ableitung des Winkels nach der
Zeit wird als Winkelgeschwindigkeit definiert und mit ω bezeichnet
ω := ϕ̇ .
(3.8)
Für die Einheit der Winkelgeschwindigkeit ergibt sich [ω] = 1/s. Die Ableitung
der Winkelgeschwindigkeit nach der Zeit ist definiert als Winkelbeschleunigung
α := ω̇ = ϕ̈ .
Für die Einheit der Winkelbeschleunigung ergibt sich [α] = 1/s2 . Außerdem
sind noch folgende Begriffe in der Physik gebräuchlich. Der Winkel ϕ ist das
Produkt aus der Zahl n der ausgeführten Umdrehungen und dem Winkel 2π,
der einem vollen Umlauf entspricht
ϕ = 2πn .
(3.9)
Aus den Gl. (3.8) und (3.9) ergibt sich
ω = 2π ṅ .
ṅ wird Umlauffrequenz oder Drehzahl genannt und mit f bezeichnet,
f := ṅ .
Damit ergibt sich sofort folgender Zusammenhang zwischen Winkelgeschwindigkeit und Umlauffrequenz
ω = 2πf .
Ein besonders einfacher Fall einer Drehbewegung liegt vor, wenn die Winkelgeschwindigkeit ω konstant ist. Der Drehwinkel ϕ als Funktion der Zeit hat
dann die Form
ϕ = ωt .
(3.10)
Die Periodendauer T der Drehbewegung ist definiert als die für einen vollen
Umlauf benötigte Zeit. Aus Gl. (3.10) entnehmen wir, daß für sie 2π = ωT
gelten muß bzw.
2π
1
T =
= .
ω
f
23
3.3 Kreisbewegungen
y
6
~
eϕ
J
]
J
3
J
J
Jr
r
ϕ
~
er
P
-
x
Abbildung 3.3: Ebene Polarkoordinaten
3.3.2
Ebene Polarkoordinaten
Bei der Beschreibung bestimmter Bewegungen in der Ebene, insbesondere der
Bewegung eines Teilchens auf einer Kreisbahn, empfiehlt es sich, statt der
kartesischen Koordinaten x, y die ebenen Polarkoordinaten r, ϕ zu verwenden.
r ist dabei der radiale Abstand des betrachteten Punktes P vom Ursprung
und ϕ der Winkel, den der Ortsvektor zum Punkt P mit der positiven x-Achse
einschließt, siehe Abb. 3.3. Die Umrechnung von kartesischen Koordinaten in
Polarkoordinaten geschieht durch die Gleichungen
r=
q
x2 + y 2
und
bzw. umgekehrt durch
arccos q x
x2 + y 2
ϕ=
q x
− arccos
x2 + y 2
x = r cos ϕ
und
, falls y ≥ 0
, falls y < 0
y = r sin ϕ .
Zu den Polarkoordinaten gehören weiter noch die beiden Einheitsvektoren
~er und ~eϕ . Sie sind in Abb. 3.3 ebenfalls dargestellt. Der Vektor ~er zeigt in
jedem Punkt der Ebene in Richtung wachsender Werte von r, also radial nach
außen. Der Vektor ~eϕ zeigt in jedem Punkt der Ebene in Richtung wachsender
Werte von ϕ. Er liegt somit tangential an einem Kreis um den Ursprung durch
24
3 Bewegung im dreidimensionalen Raum
den Punkt P und weist in mathematisch positive Drehrichtung. In Abb. 3.4
sind diese beiden Einheitsvektoren noch einmal dargestellt, und zwar so parallelverschoben, daß ihr Anfangspunkt im Koordinatenursprung liegt. Außerdem
ist der Einheitskreis eingezeichnet. Aus Abb. 3.4 ergibt sich folgende Darstellung für die Einheitsvektoren ~er und ~eϕ
~er = cos ϕ ~ex + sin ϕ ~ey ,
~eϕ = − sin ϕ ~ex + cos ϕ ~ey .
y
6
J
]
J
3
~
eϕ JJ
~
er J
ϕ
J
-
x
Abbildung 3.4: Der Einheitskreis mit den Vektoren ~er und ~eϕ
Wenn sich ein Teilchen in der Ebene bewegt, ändert sich der Winkel ϕ mit
der Zeit, und es ergibt sich
~e˙ r = (− sin ϕ ~ex + cos ϕ ~ey ) ϕ̇
~e˙ ϕ = (− cos ϕ ~ex − sin ϕ ~ey ) ϕ̇
=
ϕ̇ ~eϕ ,
=
−ϕ̇ ~er .
Damit können wir aber Geschwindigkeit und Beschleunigung des Teilchens
berechnen. Wir gehen aus von dem Ortsvektor ~r, der die Lage des Teilchens
beschreibt
~r = r~er .
Differentiation nach der Zeit ergibt für die Geschwindigkeit ~v
~v = ~r˙ = ṙ~er + r~e˙ r = ṙ~er + rϕ̇~eϕ .
(3.11)
25
3.3 Kreisbewegungen
Erneute Differentiation nach der Zeit ergibt für die Beschleunigung ~a
d
(ṙ~er + rϕ̇~eϕ )
dt
= r̈~er + ṙ~e˙ r + ṙϕ̇~eϕ + rϕ̈~eϕ + rϕ̇~e˙ ϕ
= r̈~er + ṙϕ̇~eϕ + ṙϕ̇~eϕ + rϕ̈~eϕ − rϕ̇ϕ̇~er
~a =
oder
~a = (r̈ − rϕ̇2 )~er + (rϕ̈ + 2ṙϕ̇)~eϕ .
3.3.3
(3.12)
Gleichförmige Kreisbewegung
Ein wichtiger Spezialfall der Bewegung in einer Ebene ist die gleichförmige
Kreisbewegung. Dabei bewegt sich ein Teilchen auf einer Kreisbahn um den
Koordinatenursprung mit konstanter Winkelgeschwindigkeit ω = ϕ̇. Der Abstand r vom Zentrum ist bei einer Kreisbewegung natürlich konstant, also gilt
ṙ = 0 und r̈ = 0. Damit erhalten wir aus Gl. (3.11) für die Geschwindigkeit
~v = rω~eϕ .
Der Betrag der Geschwindigkeit ist konstant, und zwar
v = ωr .
(3.13)
Bei der letzten Gleichung haben wir ohne Beschränkung der Allgemeinheit
angenommen, daß die Bewegung in mathematisch positivem Drehsinn erfolgt,
also ω ≥ 0. Da wir weiter eine konstante Winkelgeschwindigkeit vorausgesetzt
haben, also α = ω̇ = ϕ̈ = 0, erhalten wir aus Gl. (3.12) für die Beschleunigung
~a = −rω 2~er = −
v2
~er .
r
Wir erhalten somit eine Beschleunigung, die stets zum Kreismittelpunkt gerichtet ist. Der Betrag ist konstant, und zwar
a = rω 2 =
v2
.
r
Diese Beschleunigung wird Zentripetalbeschleunigung genannt.
26
3.3.4
3 Bewegung im dreidimensionalen Raum
Ungleichförmige Kreisbewegung
Bei einer ungleichförmigen Kreisbewegung ist im Gegensatz zur gleichförmigen
Kreisbewegung die Winkelgeschwindigkeit nicht mehr konstant, sondern eine
beliebige Funktion der Zeit. Das Teilchen läuft also mal schneller und mal
langsamer auf der Kreisbahn um. Für die Geschwindigkeit erhalten wir aus
Gl. (3.11) auch in diesem Fall wieder
~v = rω~eϕ
und für den Betrag der Geschwindigkeit
v = ωr .
(3.14)
Der Betrag der Geschwindigkeit ist hier allerdings nicht länger konstant, sondern hängt von der Zeit t ab, da ja auch ω von der Zeit abhängt. In Gl. (3.14)
ist wieder wie oben ohne Beschränkung der Allgemeinheit ω ≥ 0 vorausgesetzt.
Für die Berechnung der Beschleunigung müssen wir bei der ungleichförmigen
Kreisbewegung berücksichtigen, daß die Winkelbeschleunigung α = ω̇ = ϕ̈
nicht länger gleich Null ist. Aus Gl. (3.12) erhalten wir für konstantes r sowie
mit den Beziehungen ω = ϕ̇ und α = ϕ̈
~a = −rω 2~er + rα~eϕ .
Die Beschleunigung besteht also aus zwei Komponenten, der stets zum Kreismittelpunkt zeigenden Zentripetalbeschleunigung
~ar = −rω 2~er = −
v2
~er
r
und der tangential zur Kreisbahn liegenden Tangentialbeschleunigung
~aϕ = rα~eϕ .
Eine Tangentialbeschleunigung tritt also auf, sobald die Winkelgeschwindigkeit
nicht mehr konstant ist.
Kapitel 4
Kraft und Bewegung
In den vorausgegangenen Kapiteln haben wir die Bewegung von Teilchen genau untersucht. Offen ist aber die Frage nach der Ursache für eine Bewegung.
Warum fällt ein Stein zur Erde? Warum bewegen sich die Planeten auf Ellipsenbahnen um die Sonne? Der Zusammenhang zwischen Kraft und Bewegung
wurde zuerst von ISAAC NEWTON (1642 - 1727) erkannt. Er formulierte
diesen in drei Gesetzen, die als die NEWTONschen Axiome in die Geschichte eingegangen sind. Auf ihnen basiert die gesamte klassische Mechanik. Für
die Anwendung der NEWTONschen Axiome muß man die verschiedenen in
der Natur auftretenden Kräfte genau kennen. In diesem Kapitel werden Federkräfte, Reibungskräfte und die Gravitationskraft genauer untersucht. Wichtig für die richtige Anwendung der NEWTONschen Axiome ist die Wahl des
Bezugssystems. Die Axiome gelten nur in sogenannten Inertialsystemen. In
beschleunigten Bezugssystemen treten zusätzlich Trägheitskräfte auf, die im
letzten Abschnitt ausführlich betrachtet werden.
4.1
Die NEWTONschen Axiome
Es entspricht unserer täglichen Erfahrung, daß wir eine Kraft aufbringen
müssen, um einen Körper zu deformieren, um z.B. ein Gummiband zu dehnen. Wir müssen ebenfalls eine Kraft aufwenden, um einen Gegenstand zu
beschleunigen, um z.B. einen Ball wegzuwerfen. Es sind also zwei Wirkungen
einer Kraft zu unterscheiden:
1. Die statische Wirkung einer Kraft zeigt sich in der Deformation des
Körpers, auf den die Kraft wirkt. Sie wird häufig benutzt, um das Vorhandensein einer Kraft nachzuweisen oder ihre Größe zu messen.
27
28
4 Kraft und Bewegung
2. Die dynamische Wirkung einer Kraft zeigt sich in der Änderung des
Bewegungszustandes des Körpers, auf den die Kraft wirkt. So ist eine
Kraft erforderlich, um die Geschwindigkeit eines Körpers zu vergrößern
oder zu verkleinern oder um die Richtung der Geschindigkeit zu ändern.
Die Erfahrung zeigt weiter, daß die Wirkung einer Kraft nicht nur von ihrem
Betrag, sondern auch von ihrer Richtung abhängt. Greifen mehrere Kräfte
an einem Körper an, so entspricht die gemeinsame Wirkung der vektoriellen
Summe der Einzelkräfte. Kräfte verhalten sich also wie Vektoren.
Den Zusammenhang zwischen Kraft und Bewegung formulierte NEWTON
in seinem Werk Philosophiae naturalis principia mathematica“ (Mathemati”
sche Prinzipien der Naturlehre), das 1687 erschienen ist. NEWTON gründete
seine Mechanik auf folgende drei Gesetze, die auch NEWTONsche Axiome
genannt werden.
Axiom 1 Ein Körper, auf den keine Kräfte einwirken, bleibt in Ruhe (~v = 0),
oder er bewegt sich geradlinig mit konstanter Geschwindigkeit ~v .
Dieses Axiom wird auch Trägheitsgesetz genannt. Auf den ersten Blick
scheint es der täglichen Erfahrung zu widersprechen. Jeder Gegenstand, der
sich auf einer bestimmten Unterlage bewegt, kommt, wenn er einmal angestoßen wird, nach einer gewissen Zeit zur Ruhe. Der Widerspruch löst sich
dadurch auf, daß die Bewegung nicht, wie in dem Axiom gefordert, kräftefrei
ist, sondern daß fortwährend Reibungskräfte wirken, die den Gegenstand abbremsen. Man kann aber die Gültigkeit dieses Axioms einsehen, indem man
sich den Einfluß der Reibungskräfte z.B. durch ein Luftkissen mehr und mehr
ausgeschaltet denkt. Der Gegenstand erfährt dann eine immer geringer werdende Abbremsung, und im Grenzübergang zu Null gehender Reibung ergibt sich
eine geradlinig gleichförmige Bewegung. Trotzdem stellt das Aufstellen dieses
Axioms eine herausragende Leistung dar, da sich eine kräftefreie Bewegung in
unserer Umwelt streng genommen nicht realisieren läßt.
Axiom 2 Die Beschleunigung ~a, die ein Körper erfährt, erfolgt in Richtung
der angreifenden Kraft F~ und ist proportional zu ihr, in Zeichen
F~ = m~a .
Der Proportionalitätsfaktor m ist die Masse des Körpers.
Dieses Axiom wird auch Aktionsgesetz genannt und, die Gleichung F~ = m~a
wird als NEWTONsche Bewegungsgleichung bezeichnet. Sie ist von entscheidender Bedeutung für die Physik. Mit ihr lassen sich zahllose physikalische
4.1 Die NEWTONschen Axiome
29
Phänomene beschreiben vom freien Fall eines Gegenstandes über die Berechnung von Satellitenbahnen bis hin zur Berechnung der Funktionsweise einer
Maschine.
Der in der NEWTONschen Bewegungsgleichung auftretende Faktor m ist
die Masse des beschleunigten Körpers. Man bezieht die Masse auf einen in der
Nähe von Paris aufbewahrten Normkörper. Bei diesem Normkörper handelt
es sich um einen Zylinder aus einer Platin-Iridium-Legierung, dem man die
Masse 1 Kilogramm (kg) zuordnet. Die Masse eines beliebigen anderen Körpers
läßt sich nun wie folgt ermitteln. Man lasse eine bestimmte Kraft F~ an dem
Normkörper angreifen, die dann eine Beschleunigung ~a hervorruft. Bewirkt
dieselbe Kraft F~ an irgendeinem anderen Körper ebenfalls die Beschleunigung
~a, so hat dieser auch die Masse 1 kg. Bewirkt die Kraft F~ an diesem Körper
die doppelte Beschleunigung, so hat er die Masse 0,5 kg, bewirkt sie die halbe
Beschleunigung, so hat er die Masse 2 kg, usw..
Die Einheit der Kraft wird über ihre dynamische Wirkung, also mittels der
NEWTONschen Bewegungsgleichung, festgelegt. Die Kraft F , die an einem
Körper der Masse m = 1 kg die Beschleunigung a = 1 m s−2 hervorruft, wird
als ein Newton (N) bezeichnet. Damit gilt
[F ] = [m][a] = kg m s−2 = N .
Die Kraft ist somit eine abgeleitete physikalische Größe.
In der NEWTONschen Bewegungsgleichung bezeichnet F~ die vektorielle
Summe aller angreifenden Kräfte. Für die korrekte Anwendung der NEWTONschen Bewegungsgleichung ist es also wichtig, zunächst festzustellen, welche
Kräfte alle auf einen Gegenstand wirken.
Axiom 3 Übt ein Körper 1 auf einen zweiten Körper 2 eine Kraft F~21 aus, so
übt auch der zweite auf den ersten eine Kraft F~12 aus, die denselben Betrag,
aber die entgegengesetzte Richtung hat, in Zeichen
F~12 = −F~21 .
Dieses Axiom wird auch Reaktionssgesetz genannt, und seine Aussage wird
häufig kurz mit actio = reactio ausgedrückt. Die Bedeutung dieses Axioms
zeigt sich in folgendem Demonstrationsversuch. Zwei Personen stehen jeweils
auf einer fahrbaren Unterlage und halten die Enden eines Seiles fest. Versucht
Person 1 Person 2 zu sich zu ziehen, so wird sie unweigerlich durch die entsprechende Reaktionskraft zur Person 2 gezogen.
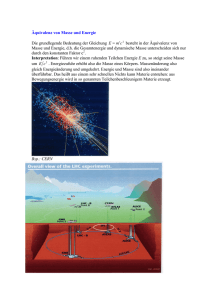
An dieser Stelle sei noch ein Beispiel für die Anwendung der NEWTONschen Bewegungsgleichung gegeben, die sogenannte ATWOODsche Fallmaschine. Abb. 4.1 zeigt zwei Blöcke, die durch ein Seil verbunden sind, welches über
30
4 Kraft und Bewegung
r
Fs
6
R
6a
mg ?
6
Fs
a ?
?Mg
Abbildung 4.1: Die ATWOODsche Fallmaschine. Zwei Massen M und m sind
verbunden durch ein Seil, welches über eine Rolle läuft
eine Rolle läuft. Die Massen der Blöcke seien M = 2, 8 kg und m = 1, 3 kg.
Berechnet werden sollen die Beschleunigung a der gesamten Anordnung und
die Zugkraft Fs im Seil (Seilspannung). Da M > m gilt, erwarten wir, daß die
Masse M sinken und die Masse m steigen wird. Wendet man die NEWTONsche Bewegungsgleichung auf den Block der Masse m an, so folgt
Fs − mg = ma ,
(4.1)
und für den Block der Masse M folgt
M g − Fs = M a .
(4.2)
Addition dieser beiden Gleichungen und Auflösen nach a ergibt
a=
M −m
g.
M +m
Setzt man dieses Resultat in eine der Gleichungen (4.1) oder (4.2) ein, so erhält
man
2mM
Fs =
g.
M +m
31
4.2 Federkraft und Kraftmesser
Wir können die letzte Gleichung auch in der Form
Fs =
m+m
M +M
mg =
Mg
M +m
M +m
schreiben. Dies zeigt uns, daß für die Seilspannung gilt
mg < Fs < M g .
Einsetzen obiger Zahlenwerte für die Massen m und M liefert
a = 3, 6 m s−2 ,
Fs = 17, 4 N .
In dem Spezialfall M = m ergibt sich a = 0 und Fs = mg = M g. Die erste
Gleichheit ist klar. Die zweite besagt, daß, wenn beide Blöcke die gleiche Masse
haben, die Seilspannung gleich dem Gewicht eines Blockes ist und nicht gleich
dem Gewicht beider Blöcke, wie man vielleicht fälschlicherweise erwarten mag.
4.2
Federkraft und Kraftmesser
Wir betrachten die in Abb.4.2 dargestellte Anordnung. Eine Schraubenfeder sei
~D
F
-
0
x
Abbildung 4.2: Beim Spannen einer Feder auftretende Kraft
auf einer Seite an einer Wand befestigt. Sie sei parallel zur x-Achse ausgerichtet
und werde aus der Ruhelage x = 0 um die Strecke x ausgelenkt. Es zeigt sich,
daß die beim Spannen einer Feder auftretende rücktreibende Kraft F~D bei nicht
zu großen Auslenkungen x der Auslenkung proportional ist, in Zeichen
F~D = −Dx ~ex .
32
4 Kraft und Bewegung
Die Konstante D ist charakteristisch für die verwendete Feder und wird als
Federkonstante bezeichnet. Sie hat die Einheit [D] = N m−1 . Obige Beziehung wird auch als das HOOKEsche Gesetz für Federn bezeichnet nach dem
englischen Physiker ROBERT HOOKE (1635 - 1703). Da die von einer Schraubenfeder ausgeübte Kraft proportional zur Auslenkung ist, kann man solche
Federn zur Kraftmessung verwenden, indem man die Feder einfach so eicht,
daß man jeder Längenänderung x die entsprechende Kraft F zuordnet. Ein
solcher Kraftmesser ist in Abb.4.3 dargestellt.
e
e
Abbildung 4.3: Aufbau eines Kraftmessers mit einer Schraubenfeder
4.3
Die Gravitationskraft
In den vorausgegangenen Kapiteln haben wir gesehen, daß ein Körper in der
Nähe der Erdoberfläche die Erdbeschleunigung g = 9, 81 m s−2 erfährt. Auf
einen Körper der Masse m wirkt nach dem zweiten NEWTONschen Axiom
somit die Kraft
Fg = mg .
Diese Kraft wird als Schwerkraft oder auch als Gewichtskraft bezeichnet. Es
stellt sich nun die Frage, wie sieht diese Anziehungskraft aus, wenn der betrachtete Körper weit von der Erde entfernt wird. Für diesen Fall hat NEWTON
das nach ihm benannte allgemeine Gravitationsgesetz aufgestellt:
Ein Körper der Masse m1 zieht einen Körper der Masse m2 mit einer Kraft an, die dem Produkt aus beiden Massen proportional und
dem Quadrat des Abstandes beider Massen umgekehrt proportional ist. Die Kraft wirkt in Richtung der Verbindungslinie zwischen
33
4.3 Die Gravitationskraft
beiden Massen zur Masse m1 hin, in Zeichen
m1 m2
F~ = −G 2 ~ˆr ,
r
wobei ~ˆr der Einheitsvektor in Richtung von m1 nach m2 ist. G ist
die NEWTONsche Gravitationskonstante
G = (6, 67259 ± 0, 00085) 10−11 N m2 kg−2 .
Die NEWTONsche Gravitationskonstante G muß in Laborexperimenten bestimmt werden. Dies wurde zuerst von HENRY CAVENDISH (1731 - 1810)
im Jahre 1798 getan mit Hilfe der nach ihm benannten Gravitationswaage“.
”
Der Aufbau ist in Abb. 4.4 dargestellt.
A
~
B
n
s
m
s
n
B
M
~
A
Abbildung 4.4: Gravitationswaage nach HENRY CAVENDISH
Zwei kleine Kugeln der Masse m sind an den Enden eines leichten Stabes
befestigt, der in seinem Mittelpunkt an einem feinen Torsionsdraht aufgehängt
ist. Führt man nun, wie in Abb. 4.4 dargestellt, zwei große Kugeln der Masse
M in die feste Position A an die kleinen Kugeln heran, so werden die kleinen
Kugeln von den großen angezogen. Auf diese Weise wird auf den Stab mit den
34
4 Kraft und Bewegung
kleinen Kugeln ein Drehmoment ausgeübt, welches ihn aus seiner ursprünglichen Lage dreht. Für die genaue Definition des Begriffs Drehmoment muß
hier auf das Kapitel 8 verwiesen werden. Der Stab nimmt schließlich eine neue
Gleichgewichtslage ein, in der sich das durch die Gravitationskraft der großen
Kugeln bewirkte Drehmoment gerade die Waage hält mit dem rücktreibenden
Drehmoment des Torsionsdrahtes. In diesem Gleichgewicht sind alle Größen
bekannt außer G, womit obiger Wert für G bestimmt werden kann. Um eine eventuelle Vorverspannung des Drahtes, die das Meßergebnis verfälschen
würde, auszuschalten, wird das Experiment wiederholt, wobei dieses Mal die
beiden großen Kugeln auf der andern Seite der kleinen Kugeln in die feste
Position B gebracht werden.
Ist die NEWTONsche Gravitationskonstante einmal bekannt, so läßt sich
auch die Masse Me der Erde bestimmen. Für einen Körper der Masse m stimmen an der Erdoberfläche die Gewichtskraft
Fg = mg
und die von der Erde auf den Körper ausgeübte Gravitationskraft
F =G
mMe
Re2
überein, wobei Re = 6, 37 106 m der Erdradius ist. Gleichsetzen der obigen
Kräfte liefert
mMe
(4.3)
mg = G 2 .
Re
Für die Masse Me der Erde folgt damit
Me =
4.4
gRe2
= 5, 98 1024 kg .
G
Reibungskräfte
Vor allen Dingen in technischen Anwendungen spielen Reibungskräfte eine
wichtige Rolle. Im folgenden soll deshalb das Phänomen der Reibung etwas
genauer untersucht werden. Wir betrachten das in Abb. 4.5 dargestellte Experiment.
Ein Festkörper, z.B. ein Holzklotz, ruhe auf einer waagerechten Oberfläche.
Wir lassen in horizontaler Richtung eine Kraft F~ an diesem Körper angreifen. Es zeigt sich nun, daß diese Kraft eine bestimmte Größe haben muß, um
den Körper in Bewegung zu setzten. Ist die Kraft kleiner, so bleibt er relativ
35
4.4 Reibungskräfte
~U
6F
~HR F
- ~
F
~N
?F
Abbildung 4.5: Demonstrationsversuch zum Ermitteln von Reibungskräften
zur Unterlage in Ruhe. Nach dem zweiten NEWTONschen Axiom muß in diesem Fall eine weitere Kraft auf den Körper wirken, die F~ gerade kompensiert.
Diese Kraft wird Haftreibungskraft genannt und mit F~HR bezeichnet. Für die
maximale Haftreibungskraft F~HR,max lassen sich folgende Eigenschaften nachprüfen:
1. Sie ist für ein und denselben Körper in einem weiten Bereich unabhängig
von der Größe der Berührungsfläche.
2. Ihr Betrag ist proportional dem Betrag der Kraft F~N , die der Körper
senkrecht auf seine Unterlage ausübt.
Zusammengefaßt ergibt sich folgendes Gesetz für die Haftreibung
FHR ≤ FHR,max = µ0 FN .
Die Proportionalitätskonstante µ0 wird Haftreibungskoeffizient genannt und
hängt von der Beschaffenheit beider Kontaktflächen ab. Die Kraft F~N ist, wie
bereits oben erwähnt, die Kraft, mit der der Körper senkrecht auf die Unterlage drückt oder gedrückt wird. Nach dem dritten NEWTONschen Axiom übt
die Unterlage eine gleich große, entgegengesetzt gerichtete Kraft F~U = −F~N
auf den Körper aus, die verhindert, daß der Körper durch die Unterlage hindurchfällt. Liegt der Körper, wie in Abb. 4.5 dargestellt, auf einer waagerechten Unterlage, so ist die Kraft F~N , die der Körper senkrecht auf die Unterlage
ausübt, einfach durch die Schwerkraft Fg = mg gegeben.
In Abb. 4.6 ist dargestellt, wie man den Haftreibungskoeffizienten µ0 experimentell bestimmen kann. Man legt den Körper auf die entsprechnede Unterlage und neigt diese so lange, bis der Körper gerade anfängt zu gleiten.
Der zugehörige Neigungswinkel sei θ. Auf den Körper wirken drei Kräfte, die
36
4 Kraft und Bewegung
~HR,max
F
~g ⊥
F
~
F
U
H
Y
H H
~g k
F
H
H
j
H
?
~g
F
θ
Abbildung 4.6: Bestimmung des Haftreibungskoeffizienten µ0
Schwerkraft Fg = mg, die von der Unterlage ausgeübte Kraft F~U und die Haftreibungskraft F~HR,max . Solange der Körper gerade noch ruht, heben sich diese
Kräfte auf. Für die Komponenten parallel zu der geneigten Unterlage bedeutet
das
FHR,max = Fg k .
(4.4)
Die Komponente Fg k der Schwerkraft parallel zur Unterlage wird Hangabtriebskraft genannt. Für diese ergibt sich aus Abb. 4.6
Fg k = mg sin θ .
Für die Haftreibungskraft gilt
FHR,max = µ0 FN = µ0 Fg ⊥ = µ0 mg cos θ .
Setzt man dies in Gl. (4.4) ein, so erhält man
µ0 mg cos θ = mg sin θ .
Der Haftreibungskoeffizient µ0 ergibt sich damit zu
µ0 = tan θ .
Ist die Haftreibung überwunden, genügt erfahrungsgemäß im allgemeinen
eine kleinere Kraft F~ , um den Körper mit konstanter Geschwindigkeit über die
Oberfläche zu ziehen. Die Kraft, die nach dem zweiten NEWTONschen Axiom
in diesem Fall der äußeren Kraft F~ entgegenwirkt, heißt Gleitreibungskraft
F~GR . Wie die Haftreibungskraft ist auch die Gleitreibungskraft in einem weiten
Bereich unabhängig von der Größe der Berührungsfläche, und ihr Betrag ist
37
4.4 Reibungskräfte
proportional dem Betrag der Kraft F~N , die der Körper senkrecht auf seine
Unterlage ausübt. Es ergibt sich somit folgendes Gesetz für die Gleitreibung
FGR = µ FN .
Der Gleitreibungskoeffizient µ ist wieder abhängig von der Beschaffenheit der
Kontaktflächen.
Das Auftreten von Haftreibung und Gleitreibung ist begründet in der mikroskopischen Struktur der sich berührenden Oberflächen. Die Reibungskräfte beruhen auf dem Widerstand, den die verzahnten Oberflächen einer Verschiebung
entgegensetzen. Bei einer Gleitbewegung werden diese Zähne“ zum Teil ver”
bogen, zum Teil abgebrochen. Durch Einsatz von Schmiermitteln läßt sich der
Gleitreibungskoeffizient µ merklich herabsetzen. Voraussetzung für die volle
Wirkung eines Schmiermittels ist ein zusammenhängender Schmierfilm. Große
Belastungen kleiner gleitender Flächen sind deshalb zu vermeiden, da die Gefahr besteht, daß das Schmiermittel zwischen den Kontaktflächen weggedrückt
wird.
In vielen technischen Anwendungen sind Reibungskräfte von entscheidender
Bedeutung. Bei Bremsen ist die Gleitreibung entscheidend. Beim Antrieb eines Fahrzeuges spielt die Haftreibung eine wesentliche Rolle. Die Antriebsräder
üben eine Kraft F~Motor auf die Fahrbahn aus. Nach dem dritten NEWTONschen Axiom ruft die Fahrbahn eine gleich große, entgegengesetzt gerichtete
Kraft F~Antrieb am Fahrzeug hervor. Voraussetzung für das Auftreten dieser
Antriebskraft ist eine momentane Haftung des Reifens auf der Fahrbahn. Die
Antriebskraft, die maximal erreicht werden kann, ist also gleich der maximalen
Haftreibungskraft zwischen Reifen und Fahrbahn.
Eine weitere Variante der Reibung ist die Rollreibung. Um ein Rad mit konstanter Geschwindigkeit auf einer Unterlage zu rollen, ist ebenfalls eine Kraft
erforderlich, welche die Rollreibungskraft F~RR gerade kompensiert. Für die
Rollreibungskraft gilt ein analoges Gesetz wie für die anderen Reibungskräfte
FRR = µR FN .
Die Rollreibungskoeffizienten µR sind im allgemeinen deutlich kleiner als Gleitreibungskoeffizienten.
Bei Fahrzeugen wie Autos oder Zügen treten Gleit- und Rollreibung gleichzeitig auf, die Gleitreibung in den Lagern und die Rollreibung der Räder. Beide
Vorgänge faßt man zusammen in dem Fahrwiderstand FF , für den ebenfalls
gilt
FF = µF FN .
µF ist der Fahrwiderstandskoeffizient.
38
4.5
4 Kraft und Bewegung
Die Trägheitskräfte in Nicht-Inertialsystemen
Die NEWTONschen Axiome weisen noch ein Problem auf, das man sich folgendermaßen klar machen kann. Die NEWTONschen Axiome sagen nichts darüber
aus, was eine Kraft eigentlich ist. Aus dem dritten Axiom ist aber zu schließen,
daß Körper aufeinander Kräfte ausüben und daß dabei die Ursache einer auf
einen Körper wirkenden Kraft in anderen Körpern zu suchen ist. Nehmen wir
für den Augenblick einmal an, daß der Ursprung von Kräften stets in anderen
Körpern liegt, so würden wir schließen, daß, wenn keine anderen Körper vorhanden sind, ein betrachteter Körper auch keine Kraft erfährt und damit das
erste NEWTONsche Axiom befolgt. Das führt nun zu folgendem Dilemma.
Für zwei Bezugssysteme Σ und Σ′ , die sich relativ zu einander beschleunigt
bewegen, kann die Feststellung des ersten NEWTONschen Axioms höchstens
in einem der beiden Bezugssysteme richtig sein. Nehmen wir an, der Körper
ruhe in bezug auf Σ, dann bewegt er sich in bezug auf Σ′ beschleunigt, und
daher kann in Σ′ entweder das erste NEWTONsche Axiom nicht richtig sein,
oder es wirken Kräfte auf den Körper. Diese in Σ′ auftretenden Kräfte kommen
aber nicht durch andere Körper zustande, denn wir hatten ja angenommen,
daß keine anderen Körper vorhanden sind. Im Bezugssystem Σ′ wissen wir daher nichts mit dem dritten NEWTONschen Axiom anzufangen, da die reactio
der auf den Körper wirkenden actio nicht zu finden ist.
Die NEWTONschen Axiome setzen offensichtlich die Vorgabe eines rich”
tigen“ Bezugssystems voraus. In ihm gelten die Axiome so, wie sie dastehen.
NEWTON sah sich deshalb zur Begründung seiner Mechanik zu folgender fundamentalen Annahme gezwungen:
Es gibt ein ausgezeichnetes Bezugssystem, genannt der absolute
Raum. Jede Bewegung ist letztlich Bewegung in bezug auf den
absoluten Raum.
Hat man den absoluten Raum als Bezugssystem, so gelten die NEWTONschen Axiome nicht nur in ihm, sondern auch in jedem Bezugssystem, das
sich gegenüber ihm geradlinig gleichförmig bewegt. Dadurch werden nämlich
nur die Geschwindigkeiten geändert, nicht aber die Beschleunigungen und damit auch nicht die Kräfte. Diese ausgezeichneten Bezugssysteme heißen nach
NEWTON Inertialsysteme.
Insbesondere ist die NEWTONsche Bewegungsgleichung in der Form
m ~a = F~ ebenfalls nur in einem Inertialsystem Σ gültig. Wir wollen im folgenden untersuchen, welche Form diese Gleichung in einem Bezugssystem Σ′
annimmt, das sich relativ zu einem Inertialsystem Σ beschleunigt bewegt.
39
4.5 Die Trägheitskräfte in Nicht-Inertialsystemen
4.5.1
Beschleunigte Translationsbewegung ausführende
Bezugssysteme
Wir betrachten in diesem Abschnitt das Inertialsystem Σ und das Bezugssystem Σ′ , welches relativ zu dem Inertialsystem Σ eine beschleunigte Translationsbewegung ausführt. Das heißt der Ursprung O′ des Bezugssystems Σ′
bewegt sich relativ zu dem Ursprung O des Bezugssystems Σ, ohne daß sich
Σ′ relativ zu Σ dreht. Die Orientierung der Achsen beider Koordinatensysteme zueinander bleibt also erhalten. Zur Vereinfachung der Schreibweise werden im folgenden die Koordinaten des Inertialsystems Σ mit x1 , x2 , x3 und
die zugehörigen Einheitsvektoren mit ~e1 , ~e2 , ~e3 bezeichnet. Entsprechend werden die Koordinaten des Nicht-Inertialsystems Σ′ mit x′1 , x′2 , x′3 und die zugehörigen Einheitsvektoren mit ~e1 ′ , ~e2 ′ , ~e3 ′ bezeichnet. Die Relativbewegung
beider Bezugssysteme läßt sich beschreiben durch den zeitabhängigen Vektor
~rtr , der vom Ursprung O des Inertialsystems Σ zum Ursprung O′ des NichtInertialsystems Σ′ zeigt. In Abb. 4.7 ist dies dargestellt, und zwar für den
Spezialfall, daß sich das Nicht-Inertialsystem Σ′ gegenüber dem Inertialsystem
Σ entlang der gemeinsamen x′2 - bzw. x2 -Achse geradlinig wegbewegt mit einer
beliebigen Beschleunigung.
~
e
63
~
r 1
~
e1 ~
e
′
3
KAA
′ 6
~
r
A
A
X XX
A
X
XX
O
A
X
zXX
X
XX
A
XXX
~
e2
z
X
AX
~
rtr
X XX
O′
~
e1 ′ X XX
z
X
~
e2 ′
Abbildung 4.7: Das Nicht-Inertialsystem Σ′ führt relativ zu dem Inertialsystem
Σ eine beschleunigte Translationsbewegung aus.
Die Bahn eines Teilchens werde bezüglich Σ durch den zeitabhängigen Vektor ~r und bezüglich Σ′ durch den zeitabhängigen Vektor ~r ′ beschrieben. Der
40
4 Kraft und Bewegung
Zusammenhang zwischen beiden Vektoren lautet
~r ′ = ~r − ~rtr .
Leitet man diese Gleichung nach der Zeit ab, so erhält man
~r˙ ′ = ~r˙ − ~r˙ tr .
Hierbei ist ~r˙ ′ = ~v ′ die Geschwindigkeit des Teilchens bezüglich Σ′ und ~r˙ = ~v
die Geschwindigkeit des Teilchens bezüglich Σ. Weiterhin ist ~r˙ tr = ~vtr die
Translationsgeschwindigkeit, mit der sich das Bezugssystem Σ′ relativ zum
Bezugssystem Σ wegbewegt. Wir haben also folgende, leicht einsehbare Beziehung zwischen den Geschwindigkeiten ~v ′ und ~v gewonnen
~v ′ = ~v − ~vtr .
Die zeitliche Ableitung dieser Gleichung liefert einen entsprechenden Zusammenhang zwischen den Beschleunigungen,
~a ′ = ~a − ~atr .
(4.5)
In dem Inertialsystem Σ gilt die NEWTONsche Bewegungsgleichung m ~a = F~ .
Setzt man dies in Gl. (4.5) ein, so zeigt sich, daß die Bewegungsgleichung in
einem Nicht-Inertialsystem Σ′ , das eine beschleunigte Translationsbewegung
ausführt, folgendermaßen lautet
m ~a ′ = F~ − m ~atr .
(4.6)
Man erhält also, daß in einem eine beschleunigte Translationsbewegung
ausführenden Bezugssystem neben der Kraft F~ , die auch im Inertialsystem
wirkt, noch die Trägheitskraft
F~tr = −m ~atr
berücksichtigt werden muß. Dies ist genau die Kraft, die einen umzureißen
versucht, wenn man in einer anfahrenden S-Bahn steht, oder die einen nach
vorne drückt, wenn man mit dem Auto bremst.
Wir wollen uns die Wirkungsweise dieser Trägheitskraft in einem Beispiel
anschauen. Man betrachte dazu Abb. 4.8. Auf einem Wagen ist ein Galgen
montiert, an dem ein Pendel der Masse m befestigt ist. Der Wagen werde auf
einer waagerechten Ebene geradlinig mit der konstanten Beschleunigung ~atr
bewegt. Berechnet werden sollen der Winkel ϕ, um den das Pendel gegenüber
41
4.5 Die Trägheitskräfte in Nicht-Inertialsystemen
ϕ
~
F
s
~tr
F
?~
~
atr
-
Fg
r
r
Abbildung 4.8: Verhalten eines Pendels auf einem beschleunigt bewegten Wagen
der Normale ausgelenkt wird, und die Fadenspannung Fs . Wir führen die Betrachtung in einem mit dem Wagen fest verbundenen Bezugssystem durch,
also in einem Nicht-Inertialsystem. Wir müssem somit ausgehen von der Bewegungsgleichung (4.6). Im Gleichgewichtszustand ruht die Masse des Pendels
relativ zum Wagen, d.h. es gilt ~a ′ = ~0. Die an der Pendelmasse m angreifenden Kräfte sind die Schwerkraft F~g , Fg = mg, die Fadenspannung F~s und die
Trägheitskraft F~tr = −m ~atr . Die Resultierende dieser Kräfte muß verschwinden, d.h.
F~g + F~tr + F~s = 0 .
Aus Abb. 4.8 läßt sich damit direkt entnehmen, daß gilt
tan ϕ =
und
Fs =
q
atr
matr
=
mg
g
q
Ftr2 + Fg2 = m a2tr + g 2 .
42
4 Kraft und Bewegung
4.5.2
Rotierende Bezugssysteme
In diesem Abschnitt wollen wir untersuchen, welche Form die NEWTONsche
Bewegungsgleichung in einem rotierenden Bezugssystem annimmt.
Wir benötigen dazu den Vektor der Winkelgeschwindigkeit ω
~ . Rotiert ein
Körper um eine feste Achse, so ist der Vektor der Winkelgeschwindigkeit wie
folgt definiert:
1. Der Betrag von ω
~ gibt die Winkelgeschwindigkeit an.
2. Die Richtung von ω
~ ist parallel zur Drehachse und zwar so orientiert,
daß sie mit der Richtung zusammenfällt, in der eine Rechtsschraube bei
entsprechender Drehung fortschreitet.
Zur Definition des Vektors der Winkelgeschwindigkeit siehe auch Abb. 4.9.
6
r
s
r
+
ω
~
?ω
~
Abbildung 4.9: Definition des Vektors der Winkelgeschwindigkeit
Wir wollen noch einen Ausdruck herleiten für die Geschwindigkeit eines
Teilchens, das sich mit der Winkelgeschwindigkeit ω
~ auf einer Kreisbahn bewegt. Der Koordinatenursprung soll aber diesmal nicht unbedingt im Mittelpunkt des Kreises liegen, sondern irgendwo auf der Drehachse, siehe Abb. 4.10.
Die Spitze des Ortsektors ~r, der die jeweilige Lage des Teilchens beschreibt,
umfährt dann die raumfeste Drehachse auf einer Kreisbahn mit dem Radius
s. Der Vektor ~r selbst bewegt sich, wie in Abb. 4.10 dargestellt, auf einem
Kegelmantel um die Drehachse. Für den Betrag der Geschwindigkeit, mit der
das Teilchen auf der Kreisbahn umläuft, können wir Gl. (3.13) benutzen. Es
gilt
v = ωs = ωr sin θ .
Die rechte Seite dieser Gleichung läßt sich als Betrag des Vektorproduktes
ω
~ × ~r deuten. Aus Abb. 4.10 kann man außerdem entnehmen, daß der Vektor
43
4.5 Die Trägheitskräfte in Nicht-Inertialsystemen
s
~
r
ω
~ 6
θ
r
*
~
v
O
Abbildung 4.10: Zur Herleitung der Beziehung ~r˙ = ω
~ × ~r
der Geschwindigkeit ~v und der Vektor ω
~ × ~r dieselbe Richtung haben. Beide
liegen tangential an dem Kreis in Richtung der Drehbewegung. Man erhält
somit für die Geschwindigkeit ~v = ~r˙ des Teilchens die Beziehung
~v = ~r˙ = ω
~ × ~r .
(4.7)
Nach diesem Einschub über die Beschreibung von Drehbewegungen gehen
wir an die Herleitung der Bewegungsgleichung in einem Bezugssystem Σ′ ,
das relativ zu einem Inertialsystem Σ mit der konstanten Winkelgeschwindigkeit ω
~ rotiert. Die Ursprünge beider Bezugssysteme sollen zusammenfallen.
In Abb. 4.11 ist dies dargestellt, und zwar für den Spezialfall, daß die x′3 -Achse
des rotierenden Bezugssystems Σ′ und die x3 -Achse des Inertialsystems Σ mit
der durch den Vektor ω
~ vorgegebenen raumfesten Drehachse zusammenfallen.
In diesem Fall bewegen sich die beiden Einheitsvektoren ~e1 ′ und ~e2 ′ des Bezugssystems Σ′ auf einer Kreisbahn um die Drehachse. Im allgemeinen Fall
sind alle Achsen des Bezugssystems Σ′ gegenüber denen des Bezugssystems Σ
abgekippt, und alle drei Einheitsvektoren ~ei ′ , i = 1, 2, 3 des Bezugssystems
Σ′ bewegen sich auf Kegelmänteln um die durch den konstanten Vektor ω
~
vorgegebene Drehachse.
Bezüglich des Bezugssystems Σ hat der Vektor ~r, der die Bahn des Teilchens
beschreibt, die Komponentendarstellung
~r =
3
X
i=1
xi ~ei .
44
4 Kraft und Bewegung
~
e3 ~
e3 ′
6
6ω
~
7
~
r
XX
X XX
~
e2 ′
XXX
z
~
e2
=
~
e1
~
e1 ′
Abbildung 4.11: Das Bezugssystem Σ′ rotiert mit der konstanten Winkelgeschwindigkeit ω
~ relativ zu dem Inertialsystem Σ
Bezüglich des Bezugssystems Σ′ hat derselbe Vektor die Darstellung
~r ′ =
3
X
x′i ~ei ′ .
(4.8)
i=1
Es handelt sich, um es noch einmal zu betonen, bei ~r und ~r ′ um zwei verschiedene Komponentendarstellungen ein und desselben Vektors, also ~r = ~r ′ . Die
Geschwindigkeit ~v , die das Teilchen relativ zum Inertialsystem Σ hat, besitzt
die Komponentendarstellung
~v =
3
X
ẋi ~ei .
i=1
Die Geschwindigkeit ~v ′ , die das Teilchen relativ zum rotierenden Bezugssystems Σ′ hat, ist gegeben durch
~v ′ =
3
X
ẋ′i ~ei ′ .
i=1
Diese beiden Geschwindigkeiten sind natürlich im allgemeinen verschieden, was
schon ein einfaches Beispiel zeigt. Ein Teilchen, welches in dem rotierenden
45
4.5 Die Trägheitskräfte in Nicht-Inertialsystemen
Bezugssystem Σ′ ruht, d.h. ~v ′ = 0, läuft, vom Inertialsystem Σ aus betrachtet,
auf einer Kreisbahn um und, zwar mit der Geschwindigkeit ~v = ω
~ × ~r.
′
Um die Verknüpfung zwischen ~v und ~v zu finden, wird Gl. (4.8) nach der
Zeit differenziert. Hierbei ist allerdings zu beachten, daß bezüglich Σ sowohl
die Koordinaten x′i als auch die Basisvektoren ~ei ′ zeitlich variabel sind. Da die
~ vorgegebene feste Raumachse
Basisvektoren ~ei ′ eine Rotation um die durch ω
ausführen, können wir Gl. (4.7) anwenden und erhalten
~e˙ i ′ = ω
~ × ~ei ′
,
i = 1, 2, 3 .
Differenziert man nun Gl. (4.8) nach der Zeit, so folgt unter Beachtung der
Produktregel
~v = ~r˙
!
3
d X
′
′
x ~ei
=
dt i=1 i
=
3
X
ẋ′i ~ei ′ +
i=1
= ~v ′ +
3
X
x′i ~e˙ i ′
i=1
3
X
i=1
′
x′i (~ω × ~ei ′ )
= ~v + ω
~×
3
X
i=1
′
x′i
~ei
′
!
= ~v ′ + ω
~ × ~r .
Damit ist die gesuchte Verknüpfung zwischen den Geschwindigkeiten ~v und ~v ′
gefunden
~v = ~v ′ + ω
~ × ~r ′ .
(4.9)
Die Aussage in Gl. (4.9) läßt sich leicht einsehen. Wenn ein Teilchen in Σ′ ruht,
also ~v ′ = 0, so hat es nach Gl. (4.7) in Σ die Geschwindigkeit ~v = ω
~ ×~r = ω
~ ×~r ′ .
′
Bewegt sich das Teilchen zusätzlich noch in Σ mit der Geschwindigkeit ~v ′ , so
ist diese Geschwindigkeit zu obiger Relativgeschwindigkeit zu addieren.
Als nächstes wollen wir die Beschleunigungen bezüglich der beiden Bezugssysteme betrachten. Die Beschleunigung ~a, die das Teilchen relativ zum Inertialsystem Σ hat, ist gegeben durch
~a =
3
X
i=1
ẍi ~ei .
46
4 Kraft und Bewegung
Die Beschleunigung ~a ′ , die das Teilchen relativ zum rotierenden Bezugssystem
Σ′ hat, lautet
′
~a =
3
X
ẍ′i ~ei ′ .
i=1
Um die zwischen den Beschleunigungen bestehende Beziehung herzuleiten,
gehen wir aus von Gl. (4.9) und differenzieren auf beiden Seiten nach der Zeit
t. Da ω
~ gemäß Voraussetzung zeitlich konstant ist, ergibt sich
~a = ~v˙
d ′
(~v + ω
~ × ~r ′ )
=
dt
!!
3
3
X
d X
′
′
′
′
xi ~ei
~×
ẋ ~ei + ω
=
dt i=1 i
i=1
=
3
X
ẍ′i
′
~ei +
i=1
′
= ~a +
ẋ′i
i=1
3
X
ẋ′i
i=1
′
3
X
= ~a + ω
~×
~e˙ i + ω
~×
′
′
3
X
ẋ′i
~ei
i=1
′
(~ω × ~ei ) + ω
~ × ~v + ω
~×
3
X
i=1
′
ẋ′i
~ei
′
!
′
!
+ω
~×
3
X
x′i
i=1
′
+ω
~ × ~v + ω
~× ω
~×
= ~a ′ + ω
~ × ~v + ω
~ × ~v ′ + ω
~ × (~ω × ~r ′ )
3
X
x′i
~e˙ i
i=1
′
′
!
!
(~ω × ~ei )
3
X
i=1
x′i
~ei
′
!!
und damit
~a = ~a ′ + 2 ω
~ × ~v ′ + ω
~ × (~ω × ~r ′ ) .
(4.10)
Im Inertialsystem Σ gilt die Bewegungsgleichung m~a = F~ . Multiplikation
der Gl. (4.10) mit der Masse m liefert
F~ = m~a ′ + 2m ω
~ × ~v ′ + m ω
~ × (~ω × ~r ′ )
bzw.
m~a ′ = F~ − 2m ω
~ × ~v ′ − m ω
~ × (~ω × ~r ′ ) .
Damit haben wir aber berechnet, welche Form die NEWTONsche Bewegungsgleichung in einem Bezugssystem Σ′ annimmt, welches mit der konstanten
Winkelgeschwindigkeit ω
~ gegenüber einem Inertialsystem Σ rotiert. Sie lautet,
wenn man noch das Antikommutativgesetz für das Vektorprodukt berücksichtigt,
m~a ′ = F~ + 2m ~v ′ × ω
~ +mω
~ × (~r ′ × ω
~) .
(4.11)
Gl. (4.11) zeigt, daß in einem rotierenden Bezugssystem neben der an der
Masse m angreifenden Kraft F~ noch folgende zwei Trägheitskräfte zu berücksichtigen sind:
47
4.5 Die Trägheitskräfte in Nicht-Inertialsystemen
1. die Zentrifugalkraft F~z
F~z = m ω
~ × (~r ′ × ω
~) ,
(4.12)
2. die CORIOLIS-Kraft F~c (GASPARD G. CORIOLIS, 1792 - 1843)
F~c = 2m ~v ′ × ω
~.
(4.13)
Im folgenden wollen wir uns die Wirkungsweise dieser beiden Trägheitskräfte an Hand einiger Beispiele veranschaulichen. Wir gehen dabei direkt
von einem rotierenden Bezugssystem aus, müssen also die Gl. (4.11) bzw. die
Gln. (4.12) und (4.13) berücksichtigen. Die Striche bei den Grössen ~r ′ , ~v ′ , ~a ′
können wir weglassen, da sie in obiger Herleitung ja nur zur Unterscheidung
der beiden Bezugssysteme dienten. Als erstes wird eine mit konstanter Winkelgeschwindigkeit rotierende Scheibe betrachtet und ein fest mit ihr verbundenes
Bezugssystem, siehe Abb. 4.12. Auf der Scheibe befinde sich an dem festen Ort
6ω
~
-u
m
~
r
3
~
r×ω
~ -
~z
F
Abbildung 4.12: Die Zentrifugalkraft F~z auf einer mit konstanter Winkelgeschwindigkeit ω
~ rotierenden Scheibe
~r im Abstand r von der Drehachse ein Teilchen der Masse m. Auf dieses auf
der Scheibe ruhende Teilchen wirkt dann die Zentrifugalkraft
F~z = m ω
~ × (~r × ω
~) .
Die Vektoren ~r und ω
~ stehen senkrecht aufeinander. Die Ausführung des zweifachen Vektorproduktes in obiger Gleichung ergibt dann, wie man aus Abb. 4.12
ersehen kann, daß die Zentrifugalkraft parallel zu dem Vektor ~r radial nach
außen gerichtet ist und folgenden Betrag hat
Fz = mω 2 r .
48
4 Kraft und Bewegung
Die Zentrifugalkraft nimmt also linear mit dem Abstand r von der Drehachse
und quadratisch mit der Winkelgeschwindigkeit ω zu. Damit das Teilchen auf
der Scheibe an der entsprechenden Stelle verharrt, muß die Zentrifugalkraft
durch eine entsprechende Gegenkraft kompensiert werden.
Auch die Erde selbst stellt ein rotierendes Bezugssystem dar. Sie rotiert mit
der Winkelgeschwindigkeit
ω=
2π
2π
=
= 7, 27 10−5 s−1 .
d
86400 s
Der Erdradius beträgt Re = 6, 37 106 m. Wir wollen die Zentrifugalkraft berechnen, die auf ein Teilchen der Masse m an einem Ort ~r der geographischen
Breite ψ wirkt, siehe Abb. 4.13. Nach Gl. (4.12) ist die Zentrifugalkraft gegeben
~z ⊥
F
~
s
6~
d
ω
~
6
- ψ
@
@
R
@
~
r
- F
~z
~z k
F
ψ
Re
Abbildung 4.13: Die Zentrifugalkraft auf der rotierenden Erde
durch
F~z = m ω
~ × (~r × ω
~) .
Zur weiteren Berechnung des obigen Ausdrucks zerlegt man den Ortsvektor ~r
am besten in eine Komponente d~ parallel zum Vektor ω
~ und eine Komponente ~s
senkrecht zu ω
~ , also ~r = d~ + ~s. Für das Vektorprodukt ~r × ω
~ folgt dann wegen
~
d×ω
~ =0
~r × ω
~ = ~s × ω
~ ,
und für die Zentrifugalkraft ergibt sich
F~z = m ω
~ × (~s × ω
~) .
4.5 Die Trägheitskräfte in Nicht-Inertialsystemen
49
Die Ausführung des zweifachen Vektorproduktes liefert ganz ähnlich wie im
zuvor betrachteten Beispiel, daß die Zentrifugalkraft parallel zum Vektor ~s
ist. Sie zeigt senkrecht von der Drehachse weg nach außen und hat folgenden
Betrag
Fz = mω 2 s .
s ist der senkrechte Abstand des Ortes ~r von der Drehachse. Dieses Ergebnis
läßt sich mit s = Re cos ψ auch in Abhängigkeit vom Breitengrad ψ ausdrücken
Fz = mω 2 Re cos ψ .
Die Resultierende aus der an der Erdoberfläche wirkenden Gravitationskraft
und der Zentrifugalkraft ergibt die tatsächliche Schwerkraft, die ein Körper
an der Erdoberfläche spürt. Ihr Betrag ist definitionsgemäß mg. Die Zentrifugalkraft läßt sich noch, wie in Abb. 4.13 dargestellt, in zwei Komponenten
zerlegen. Ihre Komponente in radialer Richtung, also senkrecht von der Erdoberfläche weg, lautet
Fz ⊥ = mω 2 Re cos2 ψ .
Ihre Komponente parallel zur Erdoberfläche ist
Fz k = mω 2 Re cos ψ sin ψ
1
mω 2 Re sin(2ψ) .
=
2
Beide Komponenten haben Einfluß auf die tatsächliche an der Erdoberfläche
herrschende Schwerkraft. Da die Zentrifugalkraft verglichen mit der Gravitationskraft sehr klein ist, und da die Komponente Fz k senkrecht auf der zum
Erdmittelpunkt hin zeigenden Gravitationskraft steht, wird der Betrag der Resultierenden aus Gravitationskraft und Zentrifugalkraft in guter Näherung nur
durch Fz ⊥ beeinflußt, nicht aber durch Fz k . Dies ergibt unter der Voraussetzung, die Erde hätte die Form einer idealen Kugel, daß die Erdbeschleunigung
g allein auf Grund der Zentrifugalkraft an einem Ort der geographischen Breite
ψ um den Wert
az ⊥ = ω 2 Re cos2 ψ
geringer ist als an den Polen. Insbesondere am Äquator herrscht eine Zentrifugalbeschleunigung von
az = ω 2 Re = 0, 034 m s−2 .
Um diesen Wert wäre die Erdbeschleunigung g dort geringer als an den Polen.
50
4 Kraft und Bewegung
Die Komponete F~z k erreicht ihren maximalen Wert bei ψ = 450 . Sie ist
verantwortlich dafür, daß ein frei hängendes Pendel nicht exakt zum Erdmittelpunkt, sondern in eine zum Äquator hin geringfügig abweichende Richtung
zeigt. An den Polen und am Äquator tritt dieser Effekt natürlich nicht auf, dort
verschwindet F~z k . Die Komponente F~z k ist außerdem die Ursache für die Abplattung der Erde an den Polen. Diese Abplattung hat ebenfalls einen Einfluß
auf die Größe der Erdbeschleunigung g. In nachfolgender Tabelle sind einige
Werte von g für Orte verschiedener geographischer Breite zusammengestellt.
Ort
geogr. Breite g (m s−2 )
Nordpol
900
9,832
Reykjavik
640
9,822
0
Leningrad
60
9,819
0
Paris
49
9,809
New York
410
9,802
0
San Franzisko
38
9,799
Honolulu
210
9,789
0
Monrovia
6
9,781
Als nächstes wird die CORIOLIS-Kraft betrachtet. Die CORIOLIS-Kraft
~
Fc = 2m ~v × ω
~ wirkt offensichtlich nur auf bewegte Objekte ( ~v 6= ~0 ). Wir
betrachten folgendes Experiment, siehe Abb. 4.14. Auf einer rotierenden Scheibe werde vom Mittelpunkt aus ein Teilchen radial nach außen geschossen. Das
Teilchen möge sich kräftefrei bewegen, so daß ein außerhalb der Scheibe ruhender Beobachter feststellt, daß sich das Teilchen geradlinig nach außen bewegt.
Ein mit der Scheibe mitrotierender Beobachter stellt jedoch die in Abb. 4.14
dargestellte gekrümmte Teilchenbahn fest. Mittels der senkrecht zur Bewegungsrichtung wirkenden CORIOLIS-Kraft kann sich auch der mitrotierende
Beobachter die Krümmung der Teilchenbahn erklären.
Die bedeutendste Auswirkung der CORIOLIS-Kraft in den Phänomenen
unseres Alltags besteht wohl in ihrem Effekt auf die atmosphärischen Luftbewegungen, insbesondere auf die Ausbildung von Zyklonen. Die CORIOLISKraft hat nämlich zur Folge, daß lokale Druckunterschiede in der Atmosphäre
sich nicht so ausgleichen, daß Luft auf kürzestem Wege von einem Gebiet
höheren Drucks (Hoch) zu einem Gebiet tieferen Drucks (Tief) strömt. Durch
die senkrecht zur Bewegungsrichtung wirkende CORIOLIS-Kraft wird die Luftströmung abgelenkt und läuft wirbelförmig auf das Tief zu. Aus Abb. 4.15
kann man entnehmen, daß die Luftströmung auf der nördlichen Halbkugel eine Rechtsabweichung und auf der südlichen Halbkugel eine Linksabweichung
51
4.5 Die Trägheitskräfte in Nicht-Inertialsystemen
)
ω
~
re
r
P′
~
v
r
P
~c ?
F
Abbildung 4.14: Bahn eines vom Mittelpunkt einer rotierenden Scheibe aus
radial nach außen geschossenen Teilchens
erfährt. Dies führt dazu, daß die Zyklone auf der nördlichen Halbkugel entgegen dem Uhrzeigersinn, auf der südlichen Halbkugel aber im Uhrzeigersinn
um das Tief laufen.
Daß sich die Erde dreht, daß also ein mit der Erde fest verbundenes Bezugssystem kein Inertialsystem ist, wird durch den FOUCAULTschen Pendelversuch (LÉON FOUCAULT, 1819 - 1868) demonstriert. Ein frei aufgehängtes
Pendel zeigt, wenn es schwingt, eine langsame Drehung seiner Schwingungsebene. Zweckmäßig wählt man ein Pendel, das aus einem Faden möglichst
großer Länge und einer Kugel möglichst großer Masse besteht. Die große Länge
bewirkt eine lange Schwingungsdauer und damit eine kleine Geschwindigkeit
der Kugel bei der Schwingung. Dies und die große Masse der Kugel machen
Störungen durch bewegte Luft und durch Reibung möglichst wirkungslos. Die
Funktionsweise des FOUCAULTschen Pendels kann man sich am einfachsten
klarmachen, wenn man zunächst ein solches Pendel am Nordpol oder Südpol
betrachtet, siehe Abb. 4.16. Der Aufhängepunkt des Pendels liegt dann auf
der Drehachse der Erde. Von einem Inertialsystem aus gesehen hält das Pendel seine Schwingungsebene bei, die Erde dreht sich lediglich darunter weg,
und zwar mit der Winkelgeschwindigkeit
ω=
150
3600
=
.
d
h
52
4 Kraft und Bewegung
Abbildung 4.15: Atmosphärische Luftströmungen auf der nördlichen, bzw.
südlichen Halbkugel
Abbildung 4.16: FOUCAULTsches Pendel am Nordpol der Erde
4.5 Die Trägheitskräfte in Nicht-Inertialsystemen
53
Der mitrotierende Beobachter kann sich die Drehung der Pendelebene durch
die CORIOLIS-Kraft erklären, die ständig senkrecht zur Bewegungsrichtung
wirkt.
Führt man den FOUCAULTschen Pendelversuch an einem Ort der geographischen Breite ψ durch, so ist nur die Komponente ω
~ ⊥ der Winkelgeschwindigkeit ω
~ relevant, die senkrecht auf der Erdoberfläche steht, siehe Abb. 4.17.
Denn in diesem Fall dreht sich die Schwingungsebene des Pendels lediglich mit
6
}
ω
~ kZ
Z
ω
~ 7
ω
~⊥
Z ψ
Abbildung 4.17: FOUCAULTsches Pendel an einem Ort der geographischen
Breite ψ
der Winkelgeschwindigkeit
ω ⊥ = ω sin ψ .
Für Hamburg ( ψ = 53, 50 ) erhält man einen Wert von
ω ⊥ = ω sin ψ =
120
.
h
54
4 Kraft und Bewegung
Kapitel 5
Arbeit und Energie
5.1
Arbeit
Wird ein Teilchen unter der Einwirkung einer konstanten Kraft F~ eine Wegstrecke ∆~r verschoben, so definieren wir die von der Kraft verrichtete Arbeit
durch
∆W := F~ ∆~r .
Diese Definition trägt der Erfahrungstatsache Rechnung, daß nur die Kraftkomponente in Richtung der Verschiebung, nicht aber die Kraftkomponente
senkrecht dazu, Arbeit verrichtet. Die Einheit der Arbeit (Joule) ergibt sich
zu
[W ] = N m = kg m2 s−2 = J (Joule) .
Ist die Kraft F~ nicht konstant, sondern eine Funktion F~ (~r) des Ortes ~r, so
kann man sich den Weg, entlang dem das Teilchen durch die Kraft verschoben
wird, in n Geradenstücke unterteilt denken, siehe Abb. 5.1. Der Weg führe von
dem Anfangspunkt ~rA zu dem Endpunkt ~rB . Die Unterteilungspunkte seien
~r0 , ~r1 , . . . , ~rn , wobei gilt ~r0 = ~rA und ~rn = ~rB . Die den Weg approximierenden
Geradenstücke sind dann gegeben durch die Vektoren
∆~ri = ~ri − ~ri−1 ,
i = 1, . . . , n .
Ist die Unterteilung des Weges fein genug gewählt, so ist die Kraft F~ (~r) längs
der einzelnen Geradenstücke in guter Näherung konstant. Die Arbeit W ergibt
sich dann zu
n
X
W =
F~ (~ri ′ ) ∆~ri ,
(5.1)
i=1
′
wobei ~ri der Ortsvektor eines Punktes ist, der zwischen ~ri und ~ri−1 auf dem
Integrationsweg liegt.
55
56
5 Arbeit und Energie
OCC
7
~ (~
F
r1 ′)
C
C
C
C
C
:
OC
∆~
r2 CC
o
S
S
S
r1
∆~
r
H
Y
H
~ (~
F
r2 ′)
~
r2
~
r1
HH ~
r
HH0
HH
HH
HHr
>
r
~
rn
O
Abbildung 5.1: Arbeit bei der Verschiebung eines Teilchens längs eines Weges
Genau genommen ist Gl. (5.1) nur dann gültig, wenn man die Längen ∆ri
der Verschiebungen ∆~ri gegen 0 gehen läßt. Der Grenzwert
lim
∆ri →0
n
X
F~ (~ri ′ ) ∆~ri =:
i=1
Z
~
rB
~
rA
F~ (~r) d~r
wird als das Wegintegral oder Kurvenintegral über das Vektorfeld F~ (~r) entlang
des gewählten Weges von ~rA nach ~rB bezeichnet. Die bei einer Verschiebung
durch die Kraft F~ (~r) entlang eines bestimmten Weges von ~rA nach ~rB verrichtete Arbeit ist also gegeben durch
W =
Z
~
rB
~
rA
F~ (~r) d~r .
(5.2)
Erfolgt die Verschiebung längs einer geraden Linie, z.B. der x-Achse, durch
eine in Richtung dieser geraden Linie wirkende Kraft F~ (x) = F (x) ~ex , so
ist die verrichtete Arbeit wegen d~r = dx ~ex gegeben durch das gewöhnliche
RIEMANN-Integral
Z xB
W =
F (x) dx .
xA
57
5.1 Arbeit
Beispiele :
1. Hubarbeit : Wir betrachten eine nach oben orientierte x-Achse. Um
einen Gegenstand entgegen der Schwerkraft Fg = −mg anzuheben, müssen
wir eine äußere Kraft Fa = −Fg = mg aufbringen, die die Schwerkraft gerade
kompensiert. Heben wir nun einen Gegenstand von der Höhe xA = 0 entlang
der x-Achse auf die Höhe xB = h an, so ist die verrichtete Arbeit
W =
Z
h
0
mg dx = mgh .
Wird der Gegenstand nicht entlang der x-Achse, sondern längs eines beliebigen Weges angehoben, so ist die verrichtete Arbeit dieselbe, wie man aus
Abb. 5.2 entnehmen kann. Man betrachte einfach für beide Wege die Hubarbeit, die notwendig ist, um einen Gegenstand von der Höhe x auf die Höhe
x + dx anzuheben. Für das Anheben entlang der x-Achse ergibt sich dW =
Fa dx = mg dx. Da die Projektion von d~r auf F~a den Wert dx hat, folgt für das
Anheben längs eines beliebigen anderen Weges dW = F~a d~r = Fa dx = mg dx.
Die Hubarbeit ist also dieselbe. Diese Überlegung gilt natürlich für alle sich
entsprechenden Segmente beider Wege, womit gezeigt ist, daß die Hubarbeit
unabhängig ist vom gewählten Weg, entlang dem ein Gegenstand angehoben
wird.
~a 6h
F
x
6
~a
6F
k
d~
r Q
Q
6
?dx
~g
F
?
Abbildung 5.2: Hubarbeit
2. Spannarbeit an einer Feder : Wir betrachten eine längs der x-Achse angebrachte Feder, siehe Abb. 5.3. Der Punkt, bei dem die Feder nicht belastet
ist, stelle den Nullpunkt der x-Achse dar. Um die Feder zu stauchen oder zu
dehnen, muß in jedem Punkt die rücktreibende Federkraft FD = −Dx kompensiert werden. Die von der äußeren Gegenkraft Fa = −FD = Dx verrichtete
58
5 Arbeit und Energie
Arbeit zum Auslenken der Feder von xA = 0 nach xB = x ist somit
W =
Z
x
0
Dx dx =
D 2
x .
2
~D
F
~a
F
-
-
x
0
Abbildung 5.3: Spannarbeit an einer Feder
3. Reibungsarbeit : Auf einem Weg der Länge s werde ein Gegenstand
auf einer waagerechten Unterlage verschoben, siehe Abb. 5.4. In jedem Punkt
des Weges ist die Reibungskraft F~R zu kompensieren, die dem Betrage nach
konstant und der Bewegung entgegengesetzt gerichtet ist. Die von der äußeren
Kraft F~a = −F~R verrichtete Arbeit ist somit, da F~a und d~r stets parallel sind,
W =
Z
~
rB
~
rA
F~a (~r) d~r =
~R
F
Z
0
s
Fa dr =
Z
0
s
FR dr = FR s .
~a
F
r~
r
B
~
rA r
Abbildung 5.4: Reibungsarbeit
Hier zeigt sich, daß im Gegensatz zur Hubarbeit die Reibungsarbeit abhängt
von dem gewählten Weg von ~rA nach ~rB . Auf einem kurzen Weg ist weniger
Arbeit zu verrichten als auf einem langen.
59
5.2 Kinetische Energie
5.2
Kinetische Energie
Wir betrachten im folgenden ein Teilchen der Masse m, welches sich unter dem
Einfluß eines Kraftfeldes F~ (~r) längs einer Bahn ~r (t) bewegt. Die Bewegung
beginne zur Zeit tA am Punkte ~rA = ~r (tA ) und ende zur Zeit tB am Punkte
~rB = ~r (tB ). Die von dem Kraftfeld F~ (~r) an dem Teilchen verrichtete Arbeit
ist dann gemäß Gl. (5.2)
W = lim
∆ri →0
n
X
F~ (~ri ′ ) ∆~ri =
i=1
Z
~
rB
~
rA
F~ (~r) d~r .
Zu den Unterteilungspunkten ~ri der Bahn des Teilchens gehören gewisse Zeiten
ti , so daß gilt ~ri = ~r (ti ). Zu den Zwischenpunkten ~ri ′ gehören gewisse Zeiten
t′i , so daß gilt ~ri ′ = ~r (t′i ). Für diese Zwischenzeiten t′i gilt ti−1 < t′i < ti . Sei
weiter ∆ti = ti − ti−1 . Setzt man in obiger Summe
∆~ri
∆ti
∆ti
∆~ri =
und berücksichtigt
∆~r
d~r
=
,
∆t→0 ∆t
dt
lim
so ergibt sich im Grenzübergang ∆ti → 0
W =
Z
tB
tA
d~r
F~ (~r)
dt .
dt
(5.3)
v
in obige
Setzen wir nun die NEWTONsche Bewegungsgleichung F~ = m d~
dt
d~
r
Gl. (5.3) für die Arbeit W ein, so erhalten wir mit dt = ~v
W =
Z
tB
tA
m
d~v
~v dt .
dt
(5.4)
Wegen
d 2
d
d~v
v = (~v ~v ) = 2 ~v
dt
dt
dt
läßt sich daß Integral in Gl. (5.4) schreiben in der Form
m Z tB
W =
2 tA
!
m
m
d 2
v dt = vB2 − vA2 .
dt
2
2
(5.5)
60
5 Arbeit und Energie
Dabei ist vA = v(tA ) und vB = v(tB ). Die Größe
Ek :=
m 2
v
2
wird kinetische Energie genannt. Wir erhalten also folgenden Zusammenhang
zwischen Arbeit und kinetischer Energie (Satz von der kinetischen Energie) :
Die Arbeit, die die resultierende Kraft an einem Teilchen verrichtet,
ist gleich der Änderung der kinetischen Energie des Teilchens, in
Zeichen
W = Ek,B − Ek,A .
(5.6)
Aus der Definition geht hervor, daß die kinetische Energie dieselbe Einheit
hat wie die Arbeit, also Joule (J).
Beispiel : Ein Körper der Masse m bewege sich unter dem Einfluß der
konstanten Kraft F auf einer geraden Linie. Er erfährt dann die konstante
Beschleunigung a = F/m. Die Bewegung beginne an der Stelle x0 mit der
Geschwindigkeit v0 . Der Körper lege unter dem Einfluß der Kraft F die Wegstrecke s = x − x0 zurück. Sei schließlich v die Geschwindigkeit am Endpunkt
x der Bewegung. Dann gilt nach obigem Satz
F s = ma(x − x0 ) =
oder
x − x0 =
m 2 m 2
v − v0
2
2
v 2 − v02
.
2a
Dies ist gerade die Bremswegformel“, Gl. (2.11) aus Kap. 2, deren Herleitung
”
dort wesentlich aufwendiger war.
5.3
Potentielle Energie
Auf Grund seiner Lage in einem Kraftfeld kann man jedem Gegenstand eine
Energie zuordnen. Befindet sich beispielsweise eine Wassermenge der Masse
m in der Höhe h im Schwerefeld der Erde, so steckt in ihr eine bestimmte
Energie. Die Energie entspricht gerade der Arbeit, die man verrichten muß, um
die Wassermenge m auf die Höhe h gegen das Schwerefeld der Erde anzuheben,
also der Hubarbeit
W = mgh .
61
5.3 Potentielle Energie
Diese Energie wird potentielle Energie genannt. Sie kann jederzeit freigesetzt
werden, indem man das Wasser die Höhe h hinunterfallen und die Turbinen eines Kraftwerkes antreiben läßt. Dabei wird die potentielle Energie in kinetische
Energie umgewandelt.
Die obige Betrachtung läßt sich auf eine große Klasse von Kraftfeldern F~ (~r)
verallgemeinern. Um einen Gegenstand in einem Kraftfeld F~ (~r) von einem
frei wählbaren Bezugspunkt ~r0 bis zu einem Punkt ~r zu verschieben, muß eine
bestimmte Arbeit verrichtet werden. Führt man die Verschiebung sehr langsam
aus, so daß von einer Beschleunigungsarbeit abgesehen werden kann, so ist in
jedem Punkt des Weges, längs dem der Gegenstand verschoben wird, die auf
ihn ausgeübte Kraft F~ (~r) durch eine entsprechende äußere Kraft F~a = −F~
zu kompensieren. Die von der äußeren Kompensationskraft zu verrichtende
Arbeit ist
Z ~r
Z ~r
W =
F~a (~r) d~r = −
F~ (~r) d~r .
~
r0
~
r0
Sie wird als potentielle Energie bezeichnet, die ein Gegenstand am Orte ~r im
Kraftfeld F~ (~r) besitzt. Die potentielle Energie ist also definiert durch
Ep (~r) := −
Z
~
r
~
r0
F~ (~r) d~r .
(5.7)
Die Einheit der potentiellen Energie ist somit ebenfalls Joule (J). Bei der
obigen Definition der potentiellen Energie sind folgende zwei Punkte zu berücksichtigen.
Zum ersten ist zu beachten, daß die Definition der potentiellen Energie
Gl. (5.7) nur sinnvoll ist, wenn das Wegintegral unabhängig ist von dem
gewählten Weg von ~r0 nach ~r. Diese Eigenschaft ist keinesfalls selbstverständlich. Liegen z.B. Reibungskräfte vor, so ist das Wegintegral sicher nicht unabhängig vom gewählten Weg. Man kommt deshalb zu folgender Definition:
Ein Kraftfeld F~ (~r) heißt konservativ, wenn für zwei beliebige Punkte ~rA und ~rB das Wegintegral
Z
~
rB
~
rA
F~ (~r) d~r
unabhängig ist von dem gewählten Weg von ~rA nach ~rB .
Offensichtlich ist ein Kraftfeld F~ (~r) genau dann konservativ, wenn für jede
geschlossene Kurve C gilt
I
F~ (~r) d~r = 0 .
C
62
5 Arbeit und Energie
Nur für konservative Kraftfelder F~ (~r) läßt sich also gemäß Gl. (5.7) eine potentielle Energie definieren.
Zum zweiten ist die potentielle Energie abhängig von der willkürlichen Wahl
des Bezugspunktes ~r0 . Wählt man einen anderen Punkt ~r0 ′ als Bezugspunkt
für die potentielle Energie, so ergibt sich für
Ep (~r) = −
Z
~
r
~
r0
F~ (~r) d~r
und
Ep ′ (~r) = −
Z
~
r
~
r0 ′
F~ (~r) d~r
wegen folgender Regel für Wegintegrale
Z
~
r
~
r0 ′
F~ (~r) d~r =
~
r0
Z
F~ (~r) d~r +
~
r0 ′
Z
~
r
~
r0
F~ (~r) d~r
nach Multiplikation dieser Gleichung mit −1 der Zusammenhang
Ep ′ (~r) = Ep (~r) + C .
Die potentiellen Energien unterscheiden sich also lediglich um eine Konstante
C, die gerade der Arbeit für eine Verschiebung von ~r0 ′ nach ~r0 entspricht
C=−
Z
~
r0
~
r0 ′
F~ (~r) d~r .
Da in konkreten physikalischen Problemen immer nur Differenzen der potentiellen Energie auftreten, ist diese additive Konstante bedeutunglos. Man wird
den Bezugspunkt, der ja gleichzeitig der Nullpunkt der potentiellen Energie
ist, immer so wählen, daß man möglichst einfache mathematische Ausdrücke
erhält.
Die potentielle Energie ist eine skalare Größe. Die Flächen im Raum, auf
denen sie denselben Wert hat, werden als Äquipotentialflächen bezeichnet. Aus
der Definition Gl. (5.7) folgt direkt, daß die Äquipotentialflächen senkrecht
zum Kraftfeld F~ (~r) verlaufen.
Beispiele :
1. Potentielle Energie im Schwerkraftfeld der Erde : Mit einer nach oben
orientierten x-Achse lautet das Schwerkraftfeld der Erde Fg = −mg. Wir haben
die Hubarbeit im Schwerkraftfeld der Erde bereits in dem Abschnitt über die
Arbeit berechnet und auch gesehen, daß sie vom gewählten Weg unabhängig
ist. Es ergibt sich also für die potentielle Energie
Ep (x) =
Z
0
x
mg dx = mgx .
63
5.3 Potentielle Energie
2. Potentielle Energie im Kraftfeld einer Feder : Die potentielle Energie einer gespannten Feder entspricht gerade der Spannarbeit, die gegen die
Federkraft FD = −Dx zu verrichten ist. Damit ergibt sich
Z
Ep (x) =
x
0
Dx dx =
D 2
x .
2
Hierbei ist die Ruhelage der Feder, x = 0, als Nullpunkt der potentiellen
Energie gewählt worden.
3. Potentielle Energie in einem Zentralkraftfeld : Unter einem Zentalkraftfeld versteht man ein Kraftfeld der Form
F~ (~r) = f (r) ~ˆr .
Eine Zentralkraft ist also in jedem Punkt ~r entweder zum Zentrum hin gerichtet, f (r) < 0, oder vom Zentrum weg gerichtet, f (r) > 0, und ihr Betrag
hängt nur vom Abstand r vom Kraftzentrum ab. Ein Beispiel ist die Gravitationskraft
Mm
F~ (~r) = −G 2 ~ˆr .
r
Zunächst kann man sich anhand von Abb. 5.5 klar machen, daß Zentralkraftfelder konservativ sind. Wir betrachten dazu das Integral
Z
~
rB
~
rA
F~ (~r) d~r
längs zweier verschiedener Wege 1 und 2, die beide den Punkt ~rA mit dem
Punkt ~rB verbinden. Man denke sich um das Kraftzentrum zwei konzentrische Kugelflächen gelegt, die sich im Radius nur um den sehr kleinen Wert dr
unterscheiden. Die beiden Kugelflächen schneiden aus dem Weg 1 das Wegsegment d~r1 und aus dem Weg 2 das Wegsegment d~r2 heraus. Die Kräfte an
diesen Stellen seien F~1 für den Weg 1 und F~2 für den Weg 2. Wir betrachten
nun die Ausdrücke F~1 d~r1 und F~2 d~r2 . Da beide Wegsegmente den gleichen
Abstand vom Ursprung haben, sind die Beträge der Kräfte F1 und F2 gleich.
Ebenso stimmen die Projektionen von d~r1 auf F~1 und von d~r2 auf F~2 überein.
Sie ergeben gerade den radialen Abstand dr der beiden Kugelflächen. Damit
erhält man
F~1 d~r1 = F1 dr = F2 dr = F~2 d~r2 .
Die gleiche Überlegung läßt sich aber für sämtliche derartigen Segmentpaare,
in die man die beiden Wege aufteilen kann, durchführen, so daß man schließlich
durch Aufsummation über alle Segmentpaare erhält, daß obiges Integral längs
der beiden Wege 1 und 2 denselben Wert liefert.
64
5 Arbeit und Energie
r ~
rB
1
2
OC F
~
C 1
C
C
C
YHC
H
d~
r
~2 F
1
r
d~
r2
dr
~
rA
O r
r
Abbildung 5.5: Zum Beweis, daß Zenralkraftfelder konservativ sind
Da die Kraft senkrecht steht auf den Kugelflächen um das Zentrum, ergibt
sich außerdem, daß die potentielle Energie auf diesen Flächen konstant ist,
also nur vom Abstand zum Zentrum abhängt. Um die potentielle Energie im
Abstand r vom Zentrum zu berechnen, wählt man am einfachsten einen Integrationsweg, der von dem Bezugspunkt mit dem Abstand r0 vom Zentrum aus
radial nach außen führt. Mit d~r = dr ~ˆr folgt
Ep (r) = −
Z
~
r
~
r0
F~ (~r) d~r = −
Z
r
r0
f (r) dr .
Für die Gravitationskraft ergibt sich
Ep (r) =
Z
r
r0
G
Mm
1
1
dr = −GM m
−
2
r
r r0
.
Legt man den Bezugspunkt ins Unendliche, r0 = ∞, so folgt
Mm
.
r
Bei dieser Wahl des Bezugspunktes ist die potentielle Energie für r = ∞ Null,
und zum Zentrum hin nimmt sie immer mehr ab. Im Ursprung, r = 0, liegt
eine Singularität vor.
Ep (r) = −G
65
5.4 Der Energiesatz
5.4
Der Energiesatz
Mit Hilfe der kinetischen und potentiellen Energie läßt sich eine wichtige Aussage der Mechanik formulieren, der Energiesatz . Wir betrachten dazu noch
einmal ein Teilchen, das sich unter dem Einfluß eines konservativen Kraftfeldes F~ (~r) bewegt. Die Bewegung beginne am Punkt ~rA und ende am Punkt
~rB . Für die vom Kraftfeld am Teilchen verrichtet Arbeit erhält man
W =
=
~
rB
Z
~
rA
Z ~r0
~
rA
= −
Z
F~ (~r) d~r
F~ (~r) d~r +
~
rA
~
r0
Z
~
rB
~
r0
F~ (~r) d~r +
= Ep (~rA ) − Ep (~rB )
= Ep,A − Ep,B .
Z
F~ (~r) d~r
~
rB
~
r0
F~ (~r) d~r
Andrerseits gilt nach Gl. (5.6) für die vom Kraftfeld verrichtete Arbeit
W = Ek,B − Ek,A .
Setzt man die obigen beiden Ausdrücke für die Arbeit W gleich, so ergibt sich
Ek,B − Ek,A = Ep,A − Ep,B
oder
Ek,B + Ep,B = Ek,A + Ep,A .
(5.8)
Damit haben wir den Energiesatz der Mechanik gewonnen, der in Worten
lautet:
Bei der Bewegung eines Gegenstandes in einem konservativen
Kraftfeld ist die Summe aus kinetischer und potentieller Energie
konstant.
Wir wollen den Energiesatz anwenden, um die Frage zu beantworten, mit
welcher Geschwindigkeit ein Satellit von der Erde abgeschossen werden muß,
um sich beliebig weit von der Erde zu entfernen. Hierbei wird die Erdrotation
und der Einfluß aller übrigen Himmelskörper vernachlässigt. Der Start erfolge
an der Erdoberfläche mit der Geschwindigkeit vf . Nach dem Energiesatz bleibt
die Gesamtenergie E, also die Summe aus kinetischer und potentieller Energie
während der Bewegung des Satelliten konstant. Es gilt somit
mMe
m
mMe
m 2
.
v −G
= vf2 − G
2
r
2
Re
(5.9)
66
5 Arbeit und Energie
Dabei ist v die Geschwindigkeit, die der Satellit im Abstand r vom Erdmittelpunkt hat. Für r = ∞ ist die potentielle Energie gleich Null. Da es genügt,
wenn der Satellit den unendlichen Abstand von der Erde mit der geringsten
möglichen Geschwindigkeit, also v = 0, erreicht, ist die kinetische Energie für
r = ∞ ebenfalls Null. Für die Gesamtenergie gilt somit E = 0. Aus Gl. (5.9)
folgt damit
s
2GMe
.
vf =
Re
Mit Gl. (4.3)
mg = G
mMe
Re2
ergibt sich
vf =
q
2gRe = 11, 2 km/s .
Diese Geschwindigkeit wird als zweite kosmische Geschwindigkeit“ oder auch
”
als Fluchtgeschwindigkeit“ bezeichnet.
”
Die erste kosmische Geschwindigkeit“ ist die Geschwindigkeit v0 , die ein
”
Satellit haben muß, um die Erde in der Nähe der Erdoberfläche auf einer
Kreisbahn zu umlaufen. In diesem Fall ist die Zentripetalbeschleunigung a =
v02 /Re gerade gleich der Erdbeschleunigung g, womit folgt
v0 =
5.5
q
gRe = 7, 9 km/s .
Leistung
Um eine Maschine zu beurteilen, reicht es nicht aus, festzustellen, welche Arbeit
sie verrichtet, sondern es ist auch wichtig, die für das Verrichten der Arbeit
benötigte Zeit zu betrachten. Ist ∆W die in der Zeit ∆t verrichtete Arbeit, so
wird der Quotient aus verrichteter Arbeit und der dafür benötigten Zeit als
mittlere Leistung bezeichnet, in Zeichen
P̄ :=
∆W
.
∆t
Um die zu einem Zeitpunkt t erbrachte Leistung zu erfassen, muß man das Zeitintervall ∆t gegen 0 gehen lassen. Die momentane Leistung ist somit definiert
als der Grenzwert, dem die mittlere Leistung, gemessen über dem Zeitintervall
∆t, zustrebt, wenn man ∆t gegen 0 gehen läßt. In einer Formel ausgedrückt
ergibt das
dW
∆W
P := lim
=
= Ẇ .
(5.10)
∆t→0 ∆t
dt
67
5.5 Leistung
Die Einheit der Leistung P wird als 1 Watt bezeichnet. Aus der Definition der
Leistung folgt
[W ]
= J/s = kg m2 /s3 = W .
[P ] =
[t]
Die Leistung von Motoren wird häufig noch in der veralteten Einheit PS angegeben, wobei die Beziehung gilt
1 PS = 746 W .
Für die verrichtete Arbeit ∆W können wir schreiben
∆W = F~ ∆~r ,
wobei F~ die zum Verrichten der Arbeit benötigte Kraft und ∆~r die Verschiebung ist. Es gilt weiter
∆W
∆~r
= F~
.
∆t
∆t
Vollzieht man nun den Grenzübergang ∆t → 0, so ergibt sich mit Gl. (5.10)
folgende Beziehung für die momentane Leistung
P =
d~r
dW
= F~
= F~ ~v .
dt
dt
Die momentane Leistung ist also das Skalarprodukt aus der Kraft F~ und der
Geschwindigkeit ~v . Die momentane Leistung wird häufig auch kurz nur mit
Leistung bezeichnen.
Die Leistung, die eine Maschine abgibt, die sogenannte Nutzleistung, ist
kleiner als die Leistung, die zu ihrem Betrieb erforderlich ist, da in jeder Maschine Leistungsverluste infolge unvermeidlicher Reibung auftreten. Ein Maß
für die Wirtschaftlichkeit einer Maschine ist der Wirkungsgrad η. Er ist definiert als der Quotient aus der Nutzleistung PNutz und der Antriebsleistung
PAntr , in Zeichen
PNutz
.
η :=
PAntr
Der Wirkungsgrad ist dimensionslos und wird häufig auch in Prozent angegeben. Wegen der Reibungsverluste ist er natürlich stets kleiner als 1, bzw.
kleiner als 100 %.
68
5 Arbeit und Energie
Kapitel 6
Impuls und Stoß
6.1
Der Schwerpunkt eines Teilchensystems
Wir betrachten im folgenden ein System aus n Teilchen. Wir wollen eine Formel
für die Berechnung der Lage des Schwerpunktes angeben. Um diese leichter
einsehen zu können, betrachten wir zunächst lediglich zwei Teilchen der Masse
m1 bzw. m2 , die sich an den Stellen x1 bzw. x2 auf der x-Achse befinden mögen,
siehe Abb. 6.1.
m2
m1
O
u
x1
xs
}
x2
-
x
Abbildung 6.1: Der Schwerpunkt xs zweier Massen m1 bzw. m2 , die sich an
den Stellen x1 bzw. x2 auf der x-Achse befinden
Es ist anschaulich einleuchtend, daß für den Schwerpunkt xs
(xs − x1 )m1 = (x2 − xs )m2
(6.1)
gelten muß. Dies ist genau der Punkt, wo man das System, bestehend aus den
Massen m1 und m2 , unterstützen muß, damit es sich im Schwerefeld der Erde
69
70
6 Impuls und Stoß
im Gleichgewicht befindet. Wir werden in Kapitel 8 sehen, daß Gl. (6.1) genau
genommen die Gleichheit zweier Drehmomente ist. Lösen wir Gl. (6.1) nach
xs auf, so folgt
xs =
1
m 1 x1 + m 2 x2
=
(m1 x1 + m2 x2 ) .
m1 + m2
m
(6.2)
Dabei ist m = m1 + m2 die Gesamtmasse des Systems. In direkter Verallgemeinerung von Gl. (6.2) ergibt sich für n auf der x-Achse an den Stellen xi
angeordnete Massen mi
n
1 X
xs =
m i xi ,
m i=1
wobei
m=
n
X
mi
i=1
wieder die Gesamtmasse des Systems ist. Befinden sich die Massen mi schließlich an beliebigen Stellen ~ri im Raum, so ist der Ortsvektor des Schwerpunktes
gegeben durch
n
1 X
mi~ri
(6.3)
~rs =
m i=1
oder in Komponenten
xs =
6.2
n
1 X
m i xi ,
m i=1
ys =
n
1 X
m i yi ,
m i=1
zs =
n
1 X
mi zi .
m i=1
Der Impuls
Der Impuls eines Teilchens der Masse m, das sich mit der Geschwindigkeit ~v
bewegt, ist definiert als
p~ := m~v .
Die Einheit des Impulses ist damit 1 kg m s−1 . Wegen
p~˙ = m~v˙ = m~a = F~
läßt sich die NEWTONsche Bewegungsgleichung auch schreiben in der Form
p~˙ = F~
oder in Worten ausgedrückt:
71
6.3 Der Impulssatz
Die zeitliche Änderung des Impulses eines Teilchens ist gleich der
angreifenden Kraft.
Haben wir ein System aus n Teilchen, so ist
p~i = mi~vi ,
i = 1, . . . , n
der Impuls des i-ten Teilchens. Der Gesamtimpuls P~ des Systems ergibt sich
als Summe der Einzelimpulse
P~ =
n
X
p~i =
i=1
n
X
mi~vi .
i=1
Aus Gl. (6.3) für den Schwerpunkt folgt
m~rs =
n
X
mi~ri .
i=1
Differentiation dieser Gleichung nach der Zeit liefert
m~r˙ s =
n
X
mi~r˙ i =
i=1
n
X
mi~vi = P~ .
i=1
Mit der Schwerpunktgeschwindigkeit ~vs = ~r˙ s gilt somit
P~ = m~vs .
(6.4)
Dieses Ergebnis lautet in Worten:
Der Gesamtimpuls eines Teilchensystems ist gleich dem Produkt
aus Gesamtmasse und Schwerpunktgeschwindigkeit.
6.3
Der Impulssatz
In diesem Abschnitt wollen wir eine wichtige Gleichung herleiten, die die Änderung des Gesamtimpulses beschreibt. Wir betrachten wieder ein System aus n
Teilchen. Auf das i-te Teilchen wirkt zum einen die äußere Kraft F~ia . Außerdem
wirkt auf das i-te Teilchen jedes der übrigen Teilchen j, j 6= i, mit der Kraft F~ij .
Die Kräfte F~ij werden als innere Kräfte oder auch als Wechselwirkungskräfte
72
6 Impuls und Stoß
bezeichnet. Für sie gilt gemäß dem dritten NEWTONschen Axiom F~ij = −F~ji .
Die NEWTONsche Bewegungsgleichung für das i-te Teilchen lautet dann
p~˙ i = F~ia +
n
X
F~ij .
j=1
j6=i
Summieren wir in der obigen Gleichung über i, i = 1, . . . , n, so folgt
n
n
n
X
X
X
˙
P~ =
p~˙ i =
F~ia +
F~ij .
i=1
i=1
i,j=1
j6=i
Die zweite Summe auf der rechten Seite der obigen Gleichung verschwindet, da
sich immer zwei Kräfte paarweise wegheben. Die erste Summe ergibt gerade
die gesamte äußere Kraft F~ a ,
F~ a =
n
X
F~ia .
i=1
Wir erhalten damit den Impulssatz
˙
P~ = F~ a .
(6.5)
Der Impulssatz lautet in Worten:
Die zeitliche Änderung des Gesamtimpulses eines Teilchensystems
ist gleich der gesamten äußeren Kraft.
Wenn alle äußeren Kräfte Null sind, liefert der Impulssatz
˙
P~ = 0 .
Dieses einfache, aber wichtige Resultat wird als Impulserhaltungssatz bezeichnet. Dieser lautet in Worten:
Wirken keine äußeren Kräfte auf ein Teilchensystem, so bleibt der
Gesamtimpuls konstant.
Der Impulserhaltungssatz ist von entscheidender Bedeutung bei der Beschreibung von Streuprozessen. Bei einem Streuprozeß bewegen sich n Teilchen aufeinander zu, wechselwirken miteinander und fliegen dann wieder auseinander,
siehe Abb. 6.2. Die Wechselwirkungskräfte können dabei durch die Gravitationskraft oder die zwischen elektrischen Ladungen wirkende COULOMB-Kraft
73
6.3 Der Impulssatz
~1
HH p
HH
j
H
~2
XX p
XX X
z
X
p
~1 ′ *
p
~2 ′ :
..
.
..
.
p
~n 1
p
~
′
PPn
PP
q
P
Abbildung 6.2: Streuprozeß von n Teilchen
oder noch ganz andere Kräfte gegeben sein. Sind die Wechselwirkungskräfte
zwischen den Teilchen von sehr kurzer Reichweite und beschränken sich nur auf
den kurzen Moment der gegenseitigen Berührung, so spricht man von Stoßprozessen. Sind p~1 , . . . , p~n die Impulse der Teilchen vor dem Stoß und p~1 ′ , . . . , p~n ′
die Impulse der Teilchen nach dem Stoß, so liefert der Impulserhaltungssatz
p~1 ′ + . . . + p~n ′ = p~1 + . . . + p~n .
Mit den Impulsänderungen ∆~pi = p~i ′ − p~i läßt sich obige Gleichung auch auf
folgende Weise schreiben
∆~p1 + . . . + ∆~pn = 0 ,
was bedeutet, daß die Summe der Impulsänderungen verschwindet. Im
nächsten Abschnitt werden wir Stoßprozesse noch ausführlich untersuchen.
Setzen wir Gl. (6.4) in Gl. (6.5) ein, so folgt der Satz vom Schwerpunkt
m~v˙ s = m~as = F~ a .
Dabei ist ~as = ~v˙ s die Schwerpunktbeschleunigung. Der Satz vom Schwerpunkt
lautet in Worten:
Wirken auf ein Teilchensystem äußere Kräfte, so bewegt sich der
Schwerpunkt des Teilchensystems so, als wenn die Gesamtmasse im
Schwerpunkt konzentriert wäre und dort die gesamte äußere Kraft
angreifen würde.
74
6 Impuls und Stoß
Wenn alle äußeren Kräfte Null sind, liefert der Satz vom Schwerpunkt ~v˙ s = 0.
Dieses Resultat lautet in Worten:
Wirken auf ein Teilchensystem keine äußeren Kräfte, so bewegt sich
der Schwerpunkt mit konstanter Geschwindigkeit, also geradlinig
gleichförmig.
6.4
Elastischer und unelastischer Stoß
Ein Stoß ist ein Vorgang, bei dem die Wechselwirkungskräfte zwischen den
Teilchen nur während sehr kurzer Zeiten wirken. So eine Situation ist z.B.
gegeben, wenn sich zwei Kugeln zunächst kräftefrei aufeinander zu bewegen.
Stoßen sie dann zusammen, so wirken sie für die kurze Dauer der Berührung
mit entgegengesetzt gleich großen Kräften aufeinander. Nach dieser Wechselwirkung bewegen sie sich wieder kräftefrei auseinander. Bei jedem Stoßvorgang
werden die Geschwindigkeiten der am Stoß beteiligten Teilchen geändert. Obwohl man die Wechselwirkungskräfte in der Regel nicht kennt, ist es mit Hilfe
des Energiesatzes und des Impulssatzes möglich, die Geschwindigkeiten der
Teilchen nach dem Stoß zu berechnen, wenn die Geschwindigkeiten vor dem
Stoß gegeben sind.
Stoßprozesse werden unterschieden, je nachdem ob die kinetische Energie
bei dem Stoß erhalten bleibt oder nicht. Wenn die kinetischen Energien vor
und nach dem Stoß gleich sind, redet man vom elastischen Stoß . Andernfalls wird vom unelastischen Stoß gesprochen. Stöße zwischen Atomen, Atomkernen oder Elementarteilchen verlaufen häufig elastisch, aber nicht immer.
Tatsächlich sind dies auch die einzigen wirklich elastischen Stöße, die in der
Natur vorkommen. Stöße zwischen makroskopischen Körpern verlaufen immer
bis zu einem gewissen Grad unelastisch. Trotzdem kann man auch solche Stöße
oft in guter Näherung als elastisch ansehen, z.B. Stöße zwischen zwei Stahloder Glaskugeln. Im Idealfall bilden sich dann die beim Stoß auftretenden Deformationen wieder vollständig zurück. Die in der Deformation steckende potentielle Energie wird bei der Rückbildung der Deformation wieder komplett
in kinetische Energie umgewandelt.
Wenn die beiden am Stoß beteiligten Körper nach dem Stoß zusammenhaften, redet man vom vollkommen unelastischen Stoß . Ein solcher liegt z.B. vor,
wenn eine Gewehrkugel in einen Holzklotz geschossen wird. Beim vollkommen
unelastischen Stoß geht nicht alle kinetische Energie verloren. Man kann aber
zeigen, daß der Verlust an kinetischer Energie den maximalen Wert annimmt,
der bei Erhaltung des Impulses möglich ist.
6.4 Elastischer und unelastischer Stoß
75
1. Der elastische Stoß : Wir nehmen im folgenden zusätzlich an, daß der
Stoß eindimensional ist, also längs einer geraden Linie erfolgt. Nur in diesem
Fall lassen sich die Geschwindigkeiten der Teilchen nach dem Stoß aus den
Geschwindigkeiten vor dem Stoß berechnen, ohne daß man weitere Größen
kennen muß. Die beiden stoßenden Teilchen haben die Massen m1 und m2 . Die
Geschwindigkeiten vor dem Stoß seien v1 und v2 , und die Geschwindigkeiten
nach dem Stoß seien v1′ und v2′ . Der Impulssatz liefert uns die Gleichung
m1 v1 + m2 v2 = m1 v1′ + m2 v2′ .
Beim elastischen Stoß sind die Wechselwirkungskräfte konservativ, das heißt
es gilt der Energiesatz der Mechanik. Da vor und nach dem Stoß keine Kräfte
auf die beteiligten Körper wirken, treten nur kinetische Energien auf. Der
Energiesatz lautet somit
1
1
1
1
m1 v12 + m2 v22 = m1 v1′2 + m2 v2′2 .
2
2
2
2
Der Impulssatz läßt sich auch in folgender Form schreiben
m1 (v1 − v1′ ) = m2 (v2′ − v2 ) ,
(6.6)
und der Energiesatz läßt sich schreiben als
m1 (v12 − v1′2 ) = m2 (v2′2 − v22 ) .
(6.7)
Dividiert man Gl. (6.7) durch Gl. (6.6), so erhält man
v1 + v1′ = v2 + v2′ .
(6.8)
Die Gln. (6.6) und (6.8) bilden nun ein lineares Gleichungssystem für die beiden
Unbekannten v1′ und v2′ . Löst man Gl. (6.8) nach v2′ auf, so ergibt sich
v2′ = v1 + v1′ − v2 .
(6.9)
Einsetzen dieser Beziehung in Gl. (6.6) liefert
m1 (v1 − v1′ ) = m2 (v1 + v1′ − 2v2 )
oder aufgelöst nach v1′
v1′ =
2m2
m1 − m2
v1 +
v2 .
m1 + m2
m1 + m2
(6.10)
76
6 Impuls und Stoß
Setzt man dieses Ergebnis in Gl. (6.9) ein, so ergibt sich
m2 − m1
2m1
v1 +
v2 .
m1 + m2
m1 + m2
v2′ =
(6.11)
Damit haben wir die gesuchten Formeln für die Geschwindigkeiten der Teilchen
nach dem Stoß gewonnen.
Häufig ist noch der Sonderfall von Interesse, bei dem eines der Teilchen,
z.B. das mit der Masse m2 , vor dem Stoß ruht, also v2 = 0. Obige Gleichungen
für die Geschwindigkeiten der Teilchen nach dem Stoß lauten dann
v1′ =
m1 − m2
v1
m1 + m2
v2′ =
2m1
v1 .
m1 + m2
und
In Abb. 6.3 ist dargestellt, wie in dem Fall (v2 = 0) die Geschwindigkeiten der
Teilchen nach dem Stoß aussehen in Abhängigkeit von den Werten der Massen
m1 und m2 .
vor dem Stoß
m1 > m 2
m1 = m 2
m1 < m 2
#
-
"!
v1
v1
j
-
v1
j
nach dem Stoß
#
-
v1′
"!
"!
-
v2′
′
′
v1 = 0
v2 = v1
#
j
v1′
j
#
-
v2
"!
′
Abbildung 6.3: Der elastische Stoß zweier Kugeln, wobei eine Kugel vor dem
Stoß ruht (v2 = 0)
6.4 Elastischer und unelastischer Stoß
77
Interessant ist hierbei noch der Grenzfall m2 → ∞, was den Stoß der Masse
m1 mit einer festen Wand bedeutet . Aus der obigen Gleichung für v1′ folgt in
diesem Fall
v1′ = −v1
bzw.
p′1 = −p1 .
Für die Impulsänderung der Masse m1 ergibt sich somit
∆p1 = p′1 − p1 = −2m1 v1 .
Da für das System aus Kugel und Wand der Impulssatz gilt, muß die Wand
den Impuls
∆pWand = −∆p1 = 2m1 v1
aufnehmen. Diese Beziehung werden wir später noch in der kinetischen Gas”
theorie“ gebrauchen.
2. Der vollkommen unelastische Stoß : Beim unelastischen Stoß bleibt
die kinetische Energie definitionsgemäß nicht erhalten. Die kinetische Energie
der Teilchen ist nach dem Stoß geringer als vor dem Stoß. Ein Teil der anfänglichen kinetischen Energie wird in Arbeit zur plastischen Verformung bzw.
Wärme umgewandelt. Der Impulssatz ist nach wie vor gültig, aber nicht mehr
der Energiesatz der Mechanik. Beim vollkommen unelastischen Stoß haften die
Teilchen nach dem Stoß zusammen und bewegen sich mit der gemeinsamen Geschwindigkeit ~v ′ fort. Wir brauchen uns hier nicht auf den eindimensionalen
Fall zu beschränken. Allein der Impulssatz erlaubt es uns, die Geschwindigkeit
~v ′ der Teilchen nach dem Stoß zu berechnen. Der Impulssatz lautet
m1~v1 + m2~v2 = (m1 + m2 )~v ′ ,
womit sich ergibt
~v ′ =
m1~v1 + m2~v2
.
m1 + m2
78
6 Impuls und Stoß
Kapitel 7
Drehimpuls und
Planetenbewegung
7.1
Die Erhaltung des Drehimpulses
~ eines einzelnen Teilchens, bezogen auf den KoordinatenurDer Drehimpuls L
sprung eines Inertialsystems, ist definiert als
~ := ~r × p~ .
L
(7.1)
Dabei ist p~ = m ~v der Impuls des Teilchens. Die Einheit des Drehimpulses
ist 1 J s = 1 N m s. Unter dem Drehimpuls des Teilchens um eine bestimmte
~ auf
Achse durch den Koordinatenursprung versteht man die Projektion von L
diese Achse.
~ , das eine Kraft F~ auf ein
Entsprechend definiert ist das Drehmoment M
einzelnes Teilchen ausübt:
~ := ~r × F~ .
M
(7.2)
Das Drehmoment hat die Einheit 1 J = 1 N m. Differenzieren wir Gl. (7.1)
nach der Zeit t, so ergibt sich
~
d
d~r
d~p
dL
= (~r × p~) =
× p~ + ~r ×
.
dt
dt
dt
dt
Nun gilt aber
d~r
× p~ = ~v × m ~v = 0 ,
dt
und in einem Inertialsystem gilt nach dem zweiten NEWTONschen Axiom
~r ×
d~p
~ .
= ~r × F~ = M
dt
79
80
7 Drehimpuls und Planetenbewegung
Damit erhalten wir als wichtiges Ergebnis den Drehimpulssatz
~
dL
~ ,
=M
dt
(7.3)
welcher in Worten lautet:
Die zeitliche Änderung des Drehimpulses ist gleich dem Drehmoment.
~ = 0, so gilt L
~ = const. Dieser Sachverhalt wird als DrehimpulserhalIst M
tungssatz bezeichnet und lautet in Worten:
Ist kein Drehmoment vorhanden, so ist der Drehimpuls konstant.
Wir betrachten nun ein Teilchen unter der Wirkung eines Zentralkraftfeldes
F~ = f (r) ~ˆr .
Das zugehörige Drehmoment ergibt sich zu
~ = ~r × F~ = (r ~ˆr ) × (f (r) ~ˆr ) = 0 .
M
In einem Zentralkraftfeld gilt somit der Drehimpulserhaltungssatz. Dies hat
eine weitreichende Konsequenz für die möglichen Bahnen eines Teilchens in
einem Zentralkraftfeld. Aus der Definition des Drehimpulses
~ = ~r × p~ = ~r × m d~r
L
dt
~
ergibt sich, daß die Vektoren ~r und d~r stets in der Ebene senkrecht zu L
liegen. Ist der Drehimpuls konstant, so bedeutet das, daß die Bewegung des
Teilchens auf die durch den Koordinatenursprung gehende Ebene senkrecht zu
~ beschränkt ist.
L
Der Drehimpuls eines sich auf irgendeiner Bahn um den Ursprung bewegenden Teilchens hat noch eine geometrische Bedeutung, die wir uns im folgenden
klar machen wollen. Das Teilchen befinde sich zur Zeit t am Ort ~r(t) und zur
Zeit t + ∆t am Ort ~r(t + ∆t). Der in der Zeit ∆t zurückgelegte Weg ist für
kleine ∆t in guter Näherung ∆~r = ~r(t + ∆t) − ~r(t), siehe Abb. 7.1. Die vom
Ortsvektor ~r während der Zeit ∆t überstrichene Fläche ergibt sich aus Abb. 7.1
näherungsweise zu
1
∆A = | ~r × ∆~r | .
2
81
7.1 Die Erhaltung des Drehimpulses
∆~
r
H
Y
)
i
P
P HH
H
~
r (t)
HH
~
r (t + ∆t)
HH
HH
HH
HrXX
O
XX
z
Abbildung 7.1: Die vom Ortsvektor ~r überstrichene Fläche
Diese Gleichung stimmt umso genauer, je kleiner ∆~r bzw. ∆t ist. Damit folgt
weiter
1
∆~r
∆A
= | ~r ×
|
∆t
2
∆t
oder im Grenzübergang ∆t strebt gegen 0
dA
1
d~r
1
L
= | ~r ×
|= | ~r × ~v |=
.
dt
2
dt
2
2m
Das bedeutet, die Flächengeschwindigkeit dA/dt ist bis auf einen Faktor gleich
dem Betrag des Drehimpulses L. Ist wie in einem Zentralkraftfeld der Dre~ konstant, so ist auch die Flächengeschwindigkeit dA/dt konstant.
himpuls L
Der vom Koordinatenursprung zum Teilchen gezogene Ortsvektor überstreicht
dann in gleichen Zeiten gleiche Flächen, siehe Abb. 7.1.
Wir können also folgende Aussagen für die Bewegung eines Teilchens in
einem Zentralkraftfeld festhalten:
1. Die Bahn des Teilchens liegt in einer Ebene.
2. Der vom Kraftzentrum zum Teilchen gezogene Ortsvektor überstreicht
in gleichen Zeiten gleiche Flächen.
Speziell für die Bewegung der Planeten im Gravitationsfeld der Sonne ist die
zweite Aussage gerade eines der KEPLERschen Gesetze, die wir im folgenden
noch ausführlich besprechen werden.
Zur Beschreibung der Bewegung eines Teilchens in einer Ebene haben wir
bereits früher die ebenen Polarkoordinaten r, ϕ eingeführt. Für die genaue
82
7 Drehimpuls und Planetenbewegung
Berechnung der Bahnen eines Teilchens in einem Zentralkraftfeld wollen wir
sie hier und insbesondere im folgenden Abschnitt wieder benutzen. Der zum
Teilchen zeigenden Ortsvektor ist
~r = r ~er ,
und für die Geschwindigkeit ~v des Teilchens gilt gemäß Gl. (3.11)
~v = ṙ~er + rϕ̇~eϕ .
~ ergibt sich dann zu
Der Drehimpuls L
~ = mr2 ϕ̇~ez .
L
Dabei ist ~ez der senkrecht auf der Bewegungsebene stehende Einheitsvektor
so orientiert, daß ~er , ~eϕ und ~ez in dieser Reihenfolge ein Rechtssystem bilden.
Für den Betrag des Drehimpulses folgt
L = mr2 ϕ̇ ,
(7.4)
wobei wir ohne Beschränkung der Allgemeinheit eine Bewegung in mathematisch positivem Drehsinn vorausgesetzt haben, d.h. ϕ̇ ≥ 0.
7.2
Die Planetenbewegung und die KEPLERschen Gesetze
JOHANNES KEPLER (1571 - 1630) formulierte, gestützt auf die Beobachtungen des Astronomen TYCHO BRAHE (1546 - 1601,) folgende drei Gesetze
für die Planetenbewegung:
1. Alle Planeten bewegen sich auf Ellipsenbahnen, in deren einem Brennpunkt sich die Sonne befindet.
2. Der von der Sonne zu einem Planeten gezogene Ortsvektor überstreicht
in gleichen Zeiten gleiche Flächen.
3. Die Quadrate der Umlaufszeiten T der Planeten um die Sonne sind proportional zur dritten Potenz der großen Halbachsen a der Ellipsen, in
Zeichen
T2
= const. .
a3
7.2 Die Planetenbewegung und die KEPLERschen Gesetze
83
Wir wollen im folgenden zeigen, daß sich die KEPLERschen Gesetze aus
dem NEWTONschen Gravitationsgesetz
mM
F~ (~r) = −G 2 ~ˆr
r
ableiten lassen. Wir betrachten dazu einen beliebigen Körper der Masse m, der
sich im Gravitationsfeld einer wesentlich größeren Masse M bewegt. Berechnet
werden soll, welche Bahnformen hierbei auftreten können. Die Voraussetzung,
daß die Masse M wesentlich größer ist als die Masse m, machen wir, damit
wir die Mitbewegung der Masse M in guter Näherung vernachlässigen können.
Dabei kann m die Masse eines Planeten und M die Masse der Sonne sein.
Genausogut kann m aber auch die Masse eines Satelliten sein, und M wäre
dann die Masse der Erde.
Zunächst ist klar, daß Kreisbahnen möglich sind. Dazu muß lediglich die
notwendige Zentripetalbeschleunigung von der Gravitationskraft aufgebracht
werden, also
mM
mω 2 r = G 2 .
(7.5)
r
Mit ω = 2π/T folgt
4π 2
T2
=
.
r3
GM
Dies ist das dritte KEPLERsche Gesetz für den Spezialfall kreisförmiger Bahnen. Mit ω = v/r ergibt sich aus Gl. (7.5) außerdem folgender Zusammenhang
zwischen der Bahngeschwindigkeit v und dem Bahnradius r
v=
s
G
M
.
r
Es treten aber noch andere Bahnformen auf, wie wir uns im folgenden klar
machen wollen. Wir legen dazu das Kraftzentrum mit der Masse M in den
Ursprung eines Koordinatensystems. Unsere Aufgabe ist es nun, die NEWTONsche Bewegungsgleichung
m ~a = −
K ˆ
~r
r2
zu lösen, wobei wir abkürzend K = GmM gesetzt haben. Aus dem vorigen
Abschnitt über den Drehimpuls wissen wir, daß sich die Bewegung nur in
einer Ebene abspielen kann. Es wird sich als günstig erweisen, für diese Ebene
die Polarkoordinaten r, ϕ zu benutzen. Dabei bezeichnet r den Abstand vom
84
7 Drehimpuls und Planetenbewegung
Kraftzentrum und ϕ den Drehwinkel gegenüber einer ausgezeichneten Achse.
Gemäß Gl. (3.12) lautet die Beschleunigung in Polarkoordinaten
~a = (r̈ − rϕ̇2 )~er + (rϕ̈ + 2ṙϕ̇)~eϕ
1d 2
(r ϕ̇)~eϕ .
= (r̈ − rϕ̇2 )~er +
r dt
Die Bewegungsgleichung lautet damit in Komponenten
m(r̈ − rϕ̇2 ) = −
K
,
r2
d
(mr2 ϕ̇) = 0 .
dt
Die zweite Gleichung läßt sich sofort integrieren
mr2 ϕ̇ = L = const. ,
(7.6)
wobei L gemäß Gl. (7.4) nichts anderes ist als der Drehimpuls. Wir erhalten hier noch einmal, daß der Drehimpuls L bzw. die Flächengeschwindigkeit
dA/dt = L/2m konstant ist, was ja gerade die Aussage des zweiten KEPLERschen Gesetzes ist. Ersetzen wir in der ersten Gleichung ϕ̇ durch L/mr2 , so
folgt
K
L2
(7.7)
r̈ − 2 3 = − 2 .
mr
mr
Diese Differentialgleichung läßt sich so ohne weiteres nicht lösen. Da wir lediglich an der Bahnform r(ϕ) interessiert sind, eliminieren wir t einfach aus den
Gln. (7.6) und (7.7). Es gilt
dr
dr dϕ
dr L
=
=
dt
dϕ dt
dϕ mr2
(7.8)
und
d2 r
d2 r
=
dt2
dϕ2
L
mr2
2
2L
−
mr3
2
L2 d2 r
−
=
2
4
2
m r dϕ
r
dr
dϕ
dr
dϕ
!2
L
mr2
!2
.
(7.9)
Auch dies führt noch nicht zu einer lösbaren Gleichung. Wir führen deshalb
die Funktion w(ϕ) ein:
1
w(ϕ) =
,
r(ϕ)
dw
1 dr
=− 2
,
dϕ
r dϕ
d2 w
1 d2 r
2
=
−
+
dϕ2
r2 dϕ2 r3
dr
dϕ
!2
.
7.2 Die Planetenbewegung und die KEPLERschen Gesetze
85
Setzen wir dies in Gl. (7.9) ein, so folgt
L2 d2 w
d2 r
=− 2 2 2
dt2
m r dϕ
und damit, wenn wir 1/r durch w ersetzen und Gl. (7.7) verwenden,
L2 w2 d2 w L2 w3
Kw2
− 2
−
=−
m dϕ2
m2
m
oder
d2 w
Km
+w = 2 .
2
dϕ
L
Für diese Differentialgleichung läßt sich nun die allgemeine Lösung angeben.
Man kann durch Einsetzen leicht nachprüfen, daß
w = A cos (ϕ − ϕ0 ) +
Km
L2
(7.10)
die Gleichung löst, mit zwei frei wählbaren Konstanten A und ϕ0 .
Da die Orientierung der Bahn in der (r, ϕ)-Ebene unwesentlich ist, setzen
wir ϕ0 = 0 und erhalten
w=
1
Km
= A cos ϕ + 2 .
r
L
(7.11)
Die Intergrationskonstante A läßt sich durch die Gesamtenergie E ausdrücken.
Mit v aus Gl. (3.11) folgt
1 2 K
mv −
2
r
K
1
m(ṙ2 + r2 ϕ̇2 ) −
=
2
r
!2
!
2
L
dr
K
1
m
+ r2 −
=
2
4
2
mr
dϕ
r
E =
=
1
2
2
L
m
!
dw
dϕ
!2
+ w2 − Kw .
(7.12)
Die vorletzte Gleichheit folgt aus Gl. (7.8), die letzte aus der Definition von
w(ϕ). Setzt man in Gl. (7.12) w(ϕ) und dw/dϕ gemäß Gl. (7.11) ein, so ergibt
sich
L2 A2 K 2 m
E=
−
.
2m
2L2
86
7 Drehimpuls und Planetenbewegung
Löst man diese Gleichung nach A auf, so erhält man
A2 =
2mE K 2 m2
+
L2
L4
oder
2EL2
Km
A= 2 1+ 2
L
K m
!1
2
.
Setzen wir dies in die Gl. (7.11) ein, so bekommen wir für die möglichen Bahnkurven
!1
1
Km
2EL2 2
cos ϕ
= 2 1+ 1+ 2
r
L
K m
oder übersichtlicher
r(ϕ) =
p
1 + ε cos ϕ
(7.13)
mit
L2
,
Km
!1
2EL2 2
ε = 1+ 2
.
K m
p =
(7.14)
(7.15)
Wie man in jeder mathematischen Formelsammlung nachschlagen kann, ist
Gl. (7.13) je nach Zahlenwert von ε die Gleichung eines Kreises, einer Ellipse,
einer Parabel oder einer Hyperbel in Polarkoordinaten, siehe auch Tab. 7.1.
Gesamtenergie E
E=−
2
− mK
2L2
mK 2
2L2
<E<0
E=0
E>0
num. Exzentrizität ε
ε=0
0<ε<1
ε=1
ε>1
Bahnform
Kreis
Ellipse
Parabel
Hyperbel
Tabelle 7.1: Zusammenhang zwischen der Gesamtenergie E, der numerischen
Exzentrizität ε und der zugehörigen Bahnform
Damit ist gezeigt, daß sich ein Körper der Masse m im Gravitationsfeld einer
größeren Masse M auf einer Kreisbahn, einer Ellipsenbahn, einer Parabelbahn
ober einer Hyperbelbahn bewegen kann. Im Falle der sich um die Sonne bewegenden Planeten sind es Ellipsenbahnen, was gerade die Aussage des ersten
87
7.2 Die Planetenbewegung und die KEPLERschen Gesetze
KEPLERschen Gesetzes ist. Welche Bahn im einzelnen vorliegt, hängt von der
Gesamtenergie E des bewegten Körpers ab. Aus Gl. (7.15) ergibt sich der in
Tab. 7.1 dargestellte Zusammenhang zwischen der Gesamtenergie E, der numerischen Exzentrizität ε und der zugehörigen Bahnform. Die Tatsache, daß
wir in Gl. (7.10) die Integrationskonstante ϕ0 = 0 gesetzt haben, bedeutet
anschaulich, daß wir dem Punkt der Bahn, bei dem die Masse m den kleinsten
Abstand von der Zentralmasse M hat, den Winkel ϕ = 0 zuordnen.
Bevor wir die elliptischen Bahnen noch genauer betrachten, seien hier kurz
einige Eigenschaften einer Ellipse zusammengestellt, siehe auch Abb. 7.2. Eine
a
b
r
e
a
F2
r
rmax
r
P
ϕ
F1
-rmin-
Abbildung 7.2: Einige Eigenschaften einer Ellipse
Ellipse ist per definitionem der geometrische Ort aller Punkte P , für die die
Summe der Abstände von zwei Punkten F1 und F2 konstant ist, also
F1 P + F2 P = const. .
(7.16)
Die Punkte F1 und F2 heißen die Brennpunkte einer Ellipse. Die Gleichung
einer Ellipse in Polarkoordinaten mit dem Koordinatenursprung im rechten
Brennpunkt lautet
p
r(ϕ) =
,
(7.17)
1 + ε cos ϕ
wobei folgende Werte für die numerische Exzentrizität ε zugelassen sind,
0 < ε < 1. Für ε = 0 ist die Ellipse zu einem Kreis entartet. Die Zentralmasse
M befindet sich bei obiger Herleitung stets im Koordinatenursprung, also in
Abb. 7.2 im rechten Brennpunkt F1 . Der Punkt einer elliptischen Bahn, der
88
7 Drehimpuls und Planetenbewegung
den kleinsten Abstand von der Zentralmasse M hat, wird Perihel genannt. Für
den Perihelabstand rmin ergibt sich aus Gl. (7.17)
rmin =
p
.
1+ε
(7.18)
Der Punkt einer elliptischen Bahn, der den größten Abstand von der Zentralmasse M hat wird Aphel genannt. Für den Aphelabstand rmax ergibt sich aus
Gl. (7.17)
p
rmax =
.
(7.19)
1−ε
Aus Abb. 7.2 läßt sich direkt folgende Beziehung entnehmen
rmin + rmax = 2a ,
(7.20)
wobei a die große Halbachse der Ellipse ist. Der Perihel hat den Abstand rmin
vom Brennpunkt F1 und den Abstand rmax vom Brennpunkt F2 . Das bedeutet
mit Gl. (7.20), daß die Konstante in Gl. (7.16) den Wert 2a hat. Aus obigen
Gleichungen folgt außerdem
p
1
p
p
1
=
+
.
a = (rmin + rmax ) =
2
2 1+ε 1−ε
1 − ε2
(7.21)
Für den Abstand e des Brennpunktes F1 bzw. F2 vom Mittelpunkt der Ellipse
erhält man aus Abb. 7.2 und mit den Gln. (7.18) und (7.21)
e = a − rmin
=
= a − (1 − ε)a
a−
=
p
1+ε
εa .
=
a−
(1 − ε2 )a
1+ε
(7.22)
Damit läßt sich aber auch die kleine Halbachse b einer Ellipse durch p und ε
ausdrücken. Aus Abb. 7.2 und den Gln. (7.21) und (7.22) ergibt sich
√
√
a 2 − e2 =
a2 − ε 2 a2
b =
√
p
.
(7.23)
= a 1 − ε2 = √
1 − ε2
Die Gln. (7.21) und (7.23) geben uns nun die Möglichkeit, speziell für elliptische Bahnen einer Masse m im Gravitationfeld einer Masse M die große
und kleine Halbachse zu berechnen in Abhängigkeit von der Gesamtenergie E
und dem Drehimpuls L der umlaufenden Masse m. Für die Halbachsen dieser
sogenannten KEPLER-Ellipsen folgt mit den Gl. (7.14) und (7.15)
2
L
p
K
K
Km
a=
=
=
2 = −
2EL
2
1−ε
2E
2|E|
− K2m
(7.24)
7.2 Die Planetenbewegung und die KEPLERschen Gesetze
und
89
2
b= √
L
L
L
p
Km
q
.
=√
=q
=
2
2EL
1−ε
−2mE
2m | E |
− K2m
(7.25)
Aus obigen Gleichungen läßt sich entnehmen, daß die große Halbachse a
nur von der Gesamtenergie E abhängt, während die kleine Halbachse b von
der Gesamtenergie E und dem Drehimpuls L abhängt. Da E und L sowie auch
K proportional zur Masse m des bewegten Körpers sind, folgt aus den obigen
Gleichungen außerdem, daß die Halbachsen unabhängig sind von der Masse
m. Das bedeutet, man kann auf derselben Umlaufbahn eine größere oder eine
kleinere Masse m umlaufen lassen. Auf der Bahn des Mondes könnte sich also
mit gleicher Geschwindigkeit auch ein Stein um die Erde bewegen. Dies ist
insbesondere bei Kreisbahnen leicht einsichtig, da in jedem Punkt der Bahn
die zur Masse m proportionale Zentripetalkraft gleich der ebenfalls zur Masse
m proportionalen Gravitationskraft ist. Die Masse m kürzt sich somit heraus.
Wir wollen nun das dritte KEPLERsche Gesetz ableiten. Wenn dA die
Fläche ist, die in der Zeit dt vom Radiusvektor überstrichen wird, so liefert die
Konstantheit der Flächengeschwindigkeit
dA
L
=
= const. .
dt
2m
(7.26)
Integration nach der Zeit ergibt für die Umlaufszeit T
A=
L
T
2m
oder
2πabm
2Am
=
,
(7.27)
L
L
da A = πab die Fläche einer Ellipse mit der großen Halbachse a und der kleinen
Halbachse b ist. Quadrieren der Gl. (7.27) und Division durch a3 ergibt
T =
(2π)2 b2 m2
T2
=
.
a3
aL2
Setzt man in diese Gleichung für a und b gemäß Gln. (7.24) und (7.25) ein, so
erhält man
2 L
2
2
m2
4π
T
4π 2 m
2m|E|
=
.
=
K
a3
K
L2
2|E|
Einsetzen von K = GmM liefert schließlich
4π 2
T2
.
=
a3
GM
(7.28)
90
7 Drehimpuls und Planetenbewegung
Dies ist gerade die Aussage des dritten KEPLERschen Gesetzes, welches
natürlich nicht nur für die Bahnen der Planeten um die Sonne gilt, sondern
für die Bewegung irgendeiner Masse m im Gravitationfeld einer wesentlich
größeren Masse M , also z.B. auch für die Bahnen von Satelliten um die Erde.
Speziell für kreisförmige Bahnen lautet das dritte KEPLERsche Gesetz,
4π 2
T2
,
=
r3
GM
wobei r der Radius der Kreisbahn ist. Diese Beziehung hatten wir weiter oben
bereits direkt hergeleitet. Auflösen nach r ergibt
r=
GM T 2
4π 2
!1
3
.
Wir fragen uns nun, auf welcher Bahn ein Satellit umlaufen muß, so daß er zu
jedem Punkt auf der Erde eine raumfeste Beziehung hat. Zunächst ist klar, daß
es eine Kreisbahn sein muß, und daß diese in der Äquatorebene liegen muß, da
der Satellit sonst zwischen Positionen über der Nord- bzw. Südhalbkugel hin
und her pendeln würde. Für den Bahnradius erhalten wir mit obiger Gleichung
nach Einsetzen von T = 1d = 24 · 60 · 60 s und Me = 5, 98 1024 kg einen
Wert von r = 42 200 km. Diese Bahn wird als geostationäre Satellitenbahn“
”
bezeichnet und verläuft also in ca. 36 000 km Höhe über dem Erdboden am
Äquator.
Um ein noch besseres Verständnis für Satellitenbahnen zu bekommen, betrachten wir im folgenden einen Satelliten der Masse m, der im Abstand r0
vom Mittelpunkt O des Zentralkörpers im Punkte P gestartet wird. Der Zentralkörper, z.B. die Erde, habe wie in obiger Herleitung die Masse M . Die
Startgeschwindigkeit werde mit vP bezeichnet, und der Start erfolge senkrecht
zur Verbindungslinie von O nach P . Statt der Geschwindigkeit vP wird meistens das Verhältnis
vP
α=
v0
angegeben. Dabei ist v0 die Geschwindigkeit, die der Satellit haben muß, um
sich auf einer Kreisbahn zu bewegen. Für diese gilt die Beziehung
m
v02
mM
=G 2 .
r0
r0
(7.29)
Für die Gesamtenergie E0 , die der Satellit auf der Kreisbahn hat, folgt mit
obiger Gleichung
1
mM
1
1
= mv02 − mv02 = − mv02 .
E0 = mv02 − G
2
r0
2
2
7.2 Die Planetenbewegung und die KEPLERschen Gesetze
91
Abbildung 7.3: Bahnen eines Satelliten, der in einem Punkt P senkrecht zu
der Verbindungsgeraden vom Erdmittelpunkt zum Startpunkt P mit der Geschwindigkeit vP = αv0 gestartet wird
Wird der Satellit mit einer beliebiegen Geschwindigkeit vP = αv0 gestartet, so
gilt für die Gesamtenergie E
E =
=
=
=
=
mM
1 2
mvP − G
2
r0
1
mM
mα2 v02 − G
2
r0
1
mM
1 2
(α − 1)mv02 + mv02 − G
2
2
r0
2
E0 − (α − 1)E0
(2 − α2 )E0
oder
E = (α2 − 2) | E0 | .
(7.30)
√
Aus Gl. (7.30) läßt sich ablesen, daß für α < 2 die Gesamtenergie E negativ
ist, was nach Tab. 7.1 eine Ellipsenbahn√für den Satelliten ergibt. Speziell für
offen, d.h.
α = 1 liegt eine Kreisbahn vor. Für α ≥ 2 werden die Bahnkurven
√
2
ist
die
Bahnkurve
der Satellit kann bis ins
Unendliche
entweichen.
Für
α
=
√
eine Parabel, für α > 2 eine Hyperbel, siehe Abb. 7.3. Liegt der Punkt P , bei
dem der Satellit nach Abbrennen der Antriebsstufen seine Startgeschwindigkeit
v0 erreicht hat, in der Nähe der Erdoberfläche, d.h. r0 = Re = 6 370 km, so
92
7 Drehimpuls und Planetenbewegung
erhalten wir mit Gl. (7.29) folgenden Wert für die Geschwindigkeit v0
v0 =
s
G
Me q
= gRe = 7, 9 km/s .
Re
Bei der zweiten Gleichheit haben wir Gl. (4.3)
mg = G
mMe
Re2
benutzt. Der oben berechnete Wert für
√ v0 ist die uns bereits bekannte erste
kosmische Geschwindigkeit. Für α = 2 ergibt sich die zweite kosmische Geschwindigkeit
q
√
vf = 2v0 = 2gRe = 11, 2 km/s ,
die Geschwindigkeit, die ein Satellit mindestens haben muß, um das Gravitationsfeld der Erde zu überwinden. Bei der Berechnung der zweiten kosmischen
Geschwindigkeit wird nur der Gravitationseinfluß der Erde berücksichtigt. Um
von der Erde startend unser Sonnensystem verlassen zu können, muß ein Satellit eine noch größere Startgeschwindigkeit haben, da er letzten Endes das
Gravitationsfeld der Sonne überwinden muß. Diese Geschwindigkeit ergibt sich
zu ca. 17 km/s und heißt dritte kosmische Geschwindigkeit.
Kapitel 8
Dynamik des starren Körpers
8.1
Der Drehimpulssatz für ein Teilchensystem
Bevor wir uns mit der Dynamik des starren Körpers befassen, betrachten wir
noch einmal allgemein ein beliebiges System aus n punktförmigen Teilchen.
Wir werden in diesem Abschnitt zeigen, daß der Drehimpulssatz auch für ein
Teilchensystem gilt, und zwar in der Form, daß die zeitliche Änderung des
Drehimpulses des Teilchensystems gleich dem Drehmoment der äußeren Kräfte
ist.
~ =
Wir haben in dem Kapitel 7 gesehen, daß zwischen dem Drehimpuls L
~r × p~ eines Teilchens und dem von einer Kraft F~ auf das Teilchen ausgeübten
~ = ~r × F~ folgender Zusammenhang besteht
Drehmoment M
~˙ = M
~ .
L
Wir leiten nun her, daß obiger Zusammenhang auch für ein beliebiges System
aus n Teilchen gilt. In Übereinstimmung mit den Begriffen aus Kapitel 7 ist
der Drehimpuls eines Systems aus n Teilchen definiert als die Summe der
Drehimpulse der einzelnen Teilchen
~ :=
L
n
X
i=1
~ri × p~i .
Dabei ist p~i = mi ~vi der Impuls des i-ten Teilchens. Wirkt auf das i-te Teilchen
die Kraft F~i , so ist das gesamte, von den Kräften F~i auf des Teilchensystem
ausgeübte Drehmoment definiert durch
~ :=
M
n
X
i=1
~ri × F~i .
93
94
8 Dynamik des starren Körpers
Wegen
d
(~ri × p~i ) =
dt
=
=
~r˙ i × p~i + ~ri × p~˙ i
~r˙ i × mi ~r˙ i + ~ri × F~i
~ri × F~i
folgt durch Aufsummation über alle Teilchen sofort die Gültigkeit des Drehimpulssatzes
~˙ = M
~ .
L
Die zeitliche Änderung des Drehimpulses ist gleich dem gesamten auf das System wirkenden Drehmoment. Die auf das i-te Teilchen wirkende Kraft F~i setzt
sich zusammen aus der äußeren Kraft F~ia und den inneren Kräften F~ij , j 6= i,
mit der die übrigen Teilchen auf das i-te wirken. Für die inneren Kräfte gilt
nach dem dritten NEWTONschen Axiom F~ji = −F~ij . Die Bewegungsgleichung
für das i-te Teilchen lautet somit
p~˙ i = F~ia +
n
X
F~ij .
j=1
j6=i
~ nur die äußeren
Man kann nun zeigen, daß bei dem Gesamtdrehmoment M
Kräfte berücksichtigt werden müssen, da das Drehmoment der inneren Kräfte
verschwindet. Für den Beweis dieser Behauptung wollen wir der Einfachheit
halber ein System aus lediglich zwei Teilchen betrachten. Gemäß dem dritten NEWTONschen Axiom gilt für die inneren Kräfte F~12 = −F~21 . Für das
~ ergibt sich dann
Gesamtdrehmoment M
~ = ~r1 × F~1 + ~r2 × F~2
M
= ~r1 × (F~1a + F~12 ) + ~r2 × (F~2a + F~21 )
= ~r1 × (F~1a − F~21 ) + ~r2 × (F~2a + F~21 )
= ~r1 × F~1a + ~r2 × F~2a + (~r2 − ~r1 ) × F~21 .
Hierbei ist
~ a = ~r1 × F~1a + ~r2 × F~2a
M
das Drehmoment der äußeren Kräfte und
~ i = (~r2 − ~r1 ) × F~21
M
das Drehmoment der inneren Kräfte. Setzen wir voraus, daß die inneren Kräfte
Zentralkräfte sind, d.h. die Kraft F~21 ist entweder parallel oder antiparallel
8.2 Drehbewegung des starren Körpers um eine feste Achse
95
zu dem Verbindungsvektor ~r2 − ~r1 , so folgt direkt, daß das Drehmoment der
inneren Kräfte verschwindet. Wir erhalten somit den Drehimpulssatz für Teilchensysteme
~˙ = M
~a,
L
(8.1)
in Worten:
Die zeitliche Änderung des Drehimpulses eines Teilchensystems ist
gleich dem Drehmoment der äußeren Kräfte.
~˙ = 0 bzw. L
~ = const.. Dieses
Sind alle äußeren Kräfte Null, so erhalten wir L
Resultat wird als Drehimpulserhaltungssatz bezeichnet und lautet in Worten:
Wirken keine äußeren Kräfte auf ein Teilchensystem, so bleibt der
Drehimpuls konstant.
8.2
Drehbewegung des starren Körpers um eine feste Achse
Ein spezielles Teilchensystem ist der sogenannte starre Körper . Unter einem
starren Körper versteht man eine Anordnung von Teilchen, deren Abstände
untereinander festgehalten werden. Das bedeutet, die inneren Kräfte zwischen
den Teilchen wirken entlang den jeweiligen Verbindungslinien und werden sofort unendlich groß, wenn man versucht, die Teilchen aus ihren Gleichgewichtslagen untereinander zu verrücken. Man kann sich das Zustandekommen solcher
inneren Kräfte vorstellen in Form von starren masselosen Verbindungen oder
in Form von Federn, deren Federkonstante gegen unendlich geht. Der starre
Körper stellt damit die Idealisierung eines realen Festkörpers dar, bei dem
die einzelnen Teilchen, in diesem Fall die Gitteratome, durch elektrostatische
Kräfte miteinander wechselwirken. Wenn wir von einem starren Körper ausgehen, lassen wir also die Schwingungen der einzelnen Teilchen und mögliche
Deformationen des gesamten Körpers unberücksichtigt. Wir wollen uns im folgenden mit den Drehbewegungen eines solchen starren Körpers beschäftigen.
Die Ergebnisse, die wir erhalten, sind gleichermaßen von Bedeutung für Maschinen, die rotierende Teile enthalten, für die sich drehenden Planeten oder
für rotierende Moleküle in einem Gas. In vielen Fällen ist die Zahl der Teilchen,
die den starren Körper aufbauen, so groß, das man nicht mehr die einzelnen
Teilchen, sondern eine kontinuierliche Masseverteilung betrachtet.
Im weiteren setzen wir voraus, daß die Drehbewegung des starren Körpers
um eine raumfeste Achse erfolgt. Die Drehachse möge mit der z-Achse eines
96
8 Dynamik des starren Körpers
Inertialsystems zusammenfallen und die Drehung erfolge mit der Winkelgeschwindigkeit ω. Aus Abb. 8.1 kann man entnehmen, daß sich dann jedes
Teilchen des starren Körpers auf einer Kreisbahn bewegt, deren Mittelpunkt
auf der Drehachse liegt.
z
6
~
6ω
Ri
*
~
vi
r
~
i
]
~ iJ
L
J
6Liz J
J
J
π
− θi J θi
2
J
r
O
Abbildung 8.1: Drehbewegung des starren Körpers um eine feste Achse
Der Ortsvektor ~ri , der die Lage des i-ten Teilchens relativ zu dem auf der
Drehachse liegenden Ursprung O des Koordinatensystems beschreibt, bewegt
sich auf einem Kegelmantel um die Drehachse. Für die Geschwindigkeit des
i-ten Teilchens ergibt sich gemäß Gl. (4.7)
~vi = ω
~ × ~ri .
(8.2)
Wir wollen nun den Gesamtdrehimpuls
~ =
L
n
X
i=1
~ri × mi ~vi
des starren Körpers berechnen. Der Gesamtdrehimpuls ergibt sich als Summe
der Drehimpulse
~ i = ~ri × mi ~vi
L
8.2 Drehbewegung des starren Körpers um eine feste Achse
97
der einzelnen Teilchen. Aus Abb. 8.1 läßt sich entnehmen, daß der Gesamt~ im allgemeinen nicht parallel zur Drehachse ist, da die einzelnen
drehimpuls L
~ i , die in der Summe erscheinen, nicht parallel zur Drehachse
Drehimpulse L
sind. Für die Beschreibung der Drehbewegung um eine feste Achse benötigen
wir zunächst nur die Projektion des Drehimpulses auf die Drehachse, also die
z-Komponente Lz des Drehimpulses. Diese läßt sich wie folgt berechnen. Aus
~ i des i-ten Teilchens den WinAbb. 8.1 entnimmt man, daß der Drehimpuls L
kel π/2 − θi mit der z-Achse einschließt, wobei θi der Winkel zwischen dem
Ortsvektor ~ri und der z-Achse ist. Da ~ri und ~vi senkrecht aufeinander stehen,
~ i zu
ergibt sich der Betrag von L
L i = m i ri v i .
Für den Betrag vi der Geschwindigkeit des i-ten Teilchens folgt aus Gl. (8.2)
vi = ωri sin θi = ωRi ,
(8.3)
wobei Ri der senkrechte Abstand des i-ten Teilchens von der Drehachse ist.
~ i folgt mit Gl. (8.3)
Für die z-Komponente von L
Liz =
=
=
=
=
Li cos (π/2 − θi )
Li sin θi
mi ri vi sin θi
m i Ri v i
mi Ri2 ω .
Aufsummation über alle Teilchen des starren Körpers liefert
Lz =
n
X
mi Ri2
i=1
!
ω.
Die in den Klammern stehende Größe
J :=
n
X
mi Ri2
i=1
wird als das Trägheitsmoment J des starren Körpers um die betreffende Drehachse (z-Achse) definiert. Die Einheit des Trägheitsmoments ist 1 kg m2 .
Zusammen mit dem Drehimpulssatz
~˙ = M
~ ,
L
98
8 Dynamik des starren Körpers
~ das gesamte auf den starren Körper einwirkende äußere Drehmoment
wobei M
bezeichnet, erhalten wir die Bewegungsgleichungen des starren Körpers
Lz = Jω ,
L̇z = Mz .
(8.4)
(8.5)
Beide Gleichungen lassen sich zusammenfassen zu der NEWTONschen Bewegungsgleichung für die Drehbewegung
J ω̇ = J ϕ̈ = Mz ,
(8.6)
wobei ϕ den Drehwinkel des starren Körpers bezeichnet. Wir haben damit
eine vollkommene Analogie zu den Gleichungen, die die Translationsbewegung
einer Masse m entlang einer geraden Linie beschreiben. Die Gln. (8.4) und (8.5)
entsprechen den Gleichungen p = mv und ṗ = F der Translationsbewegung.
Und Gl. (8.6) entspricht der NEWTONschen Bewegungsgleichung mv̇ = mẍ =
F . Man sieht, daß bei der Drehbewegung eines starren Körpers um eine feste
Achse insbesondere das Trägheitsmoment J an die Stelle der Masse m tritt.
Als nächstes wollen wir die kinetische Energie Ek berechnen, die in der
Drehbewegung eines starren Körpers steckt. Sie ergibt sich als Summe der
kinetischen Energien der einzelnen Teilchen, also
Ek =
Mit Gl. (8.3) folgt
n
X
1
i=1 2
mi vi2 .
n
1 X
Ek =
mi Ri2 ω 2
2 i=1
!
oder
1
(8.7)
Ek = Jω 2 .
2
Diese Gleichung für die kinetische Energie der Drehbewegung eines starren
Körpers entspricht der Gleichung Ek = 21 mv 2 für die kinetische Energie der
Translationsbewegung einer Masse m.
Um die von einem Drehmoment verrichtete Arbeit zu berechnen, betrachten
wir die Anordnung in Abb. 8.2. Ein starrer Körper, der sich um eine feste Achse
drehen kann, werde durch eine tangential angreifende Kraft F~ um den Winkel
dϕ verdreht. Der Angriffspunkt legt dann den Weg ds = r dϕ zurück. Die von
der Kraft verrichtete Arbeit ergibt sich zu
dW = F~ d~s = F ds = F r dϕ .
8.2 Drehbewegung des starren Körpers um eine feste Achse
99
~
6F
dϕ
r
e
~
M
K d~
s
-
~
r
Abbildung 8.2: Zur Berechnung der Arbeit, die von einem Drehmoment verrichtet wird
~ = ~r × F~ zeigt in Abb. 8.2 aus
Das von der Kraft F~ bewirkte Drehmoment M
der Zeichenebene heraus und und liegt auf der Drehachse (z-Achse). Da die
Kraft tangential angreift, gilt
Mz = F r ,
womit folgt
dW = Mz dϕ .
(8.8)
Die von einem parallel zur Drehachse gerichteten Drehmoment verrichtete Arbeit ist damit allgemein gegeben durch
W =
Z
ϕB
ϕA
Mz dϕ .
Unter dem Einfluß des Drehmomentes Mz wird der starre Körper beschleunigt.
Die Substitutionsregel der Integralrechnung und die Bewegungsgleichung (8.6)
liefern
W =
Z
ϕB
ϕA
Mz dϕ =
Z
tB
tA
Z tB
Z tB
dϕ
dt =
Mz ω dt =
J ω̇ω dt .
Mz
dt
tA
tA
Wegen
d 2
(ω ) = 2ω ω̇
dt
folgt
1 Z tB d 2
1
1
W = J
(ω ) dt = JωB2 − JωA2 .
2 tA dt
2
2
100
8 Dynamik des starren Körpers
Dabei ist ωA = ω(tA ) und ωB = ω(tB ). Mit Gl. (8.7) ergibt sich somit, daß
auch für die Drehbewegung der Satz von der kinetischen Energie gilt
W = Ek,B − Ek,A .
Die von einem Drehmoment erbrachte Leistung ist gegeben durch
P =
dW
.
dt
Zusammen mit Gl. (8.8) ergibt sich
P =
dW
dϕ
= Mz
= Mz ω .
dt
dt
Diese Gleichung entspricht der Gleichung P = F v der Translationsbewegung.
Am Schluß dieses Abschnitts sind in Tab. 8.1 noch einmal die sich entsprechenden Größen der Drehbewegung und der Translationsbewegung zusammengestellt.
Translationsbewegung
Position
x
Geschwindigkeit
v = ẋ
Beschleunigung
a = v̇
Masse
m
Impuls
p = mv
Kraft
F
Bewegungsgleichung mẍ = F
1
mv 2
Kinetische Energie
2
Leistung
P = Fv
Drehbewegung
Winkel
Winkelgeschwindigkeit
Winkelbeschleunigung
Trägheitsmoment
Drehimpuls
Drehmoment
Bewegungsgleichung
Kinetische Energie
Leistung
ϕ
ω = ϕ̇
α = ω̇
J
Lz = Jω
Mz
J ϕ̈ = Mz
1
Jω 2
2
P = Mz ω
Tabelle 8.1: Sich entsprechende Größen bei Translations- und Drehbewegung
8.3
Berechnung von Trägheitsmomenten
Im vorigen Abschnitt haben wir gesehen, daß das Trägheitsmoment
J=
n
X
mi Ri2
(8.9)
i=1
für die Drehbewegung eines starren Körpers von entscheidender Bedeutung ist.
Es hängt offensichtlich ab von der Verteilung der Masse in bezug auf die Drehachse. Bevor wir für einige spezielle Körper die Trägheitsmomente berechnen,
101
8.3 Berechnung von Trägheitsmomenten
wollen wir zunächst einen allgemeinen Zusammenhang, den sogenannten STEINERschen Satz, beweisen. Ist das Trägheitsmoment JS eines Körpers um eine
durch den Schwerpunkt S gehende Achse bekannt, so läßt sich das Trägheitsmoment JA um jede andere zu der ersten parallele Achse leicht berechnen,
siehe Abb. 8.3. Für die weitere Betrachtung benutzen wir ein Koordinatensyz
A
6
y
xi
S
Q
yi
Q
-
x
ri
Q~
QQ
s
-
a
Abbildung 8.3: Zum STEINERschen Satz
stem, dessen Ursprung im Schwerpunkt S des Körpers liegt, dessen z-Achse mit
der Drehachse durch den Schwerpunkt zusammenfällt und dessen x-Achse mit
der senkrechten Verbindungslinie zwischen beiden Drehachsen zusammenfällt.
Die beiden Drehachsen mögen den Abstand a voneinander haben. Für das
Trägheitsmoment JS des Körpers um die Achse durch den Schwerpunkt S gilt
JS =
n
X
mi (x2i + yi2 ) .
i=1
Für das Trägheitsmoment des Körpers um die durch den Punkt A gehende
parallele Achse ergibt sich
JA =
n
X
mi ((xi + a)2 + yi2 )
i=1
=
n
X
mi (x2i + 2xi a + a2 + yi2 )
i=1
=
n
X
i=1
mi (x2i + yi2 ) + 2a
n
X
i=1
m i x i + a2
n
X
i=1
mi .
(8.10)
102
8 Dynamik des starren Körpers
Der erste Summand in Gl. (8.10) ist gerade JS . Da wir den Koordinatenursprung in den Schwerpunkt gelegt haben, ergibt sich mit Gl. (6.3)
n
X
~0 = ~rS = 1
mi ~ri
m i=1
bzw. speziell für die x-Komponente
0 = xS =
n
1 X
m i xi .
m i=1
Damit erhält man aber, daß der zweite Summand in Gl. (8.10) verschwindet.
Berücksichtigt man schließlich, daß
m=
n
X
mi
i=1
die Gesamtmasse des Körpers ist, so folgt aus Gl. (8.10) die Beziehung
JA = JS + ma2 ,
die auch als STEINERscher Satz bezeichnet wird. Mit Hilfe des STEINERschen Satzes läßt sich die Berechnung des Trägheitsmomentes eines Körpers
um eine beliebige Achse zurückführen auf die Berechnung des Trägeitsmomentes um eine parallele Achse durch den Schwerpunkt. Wir wollen nun die
Trägheitsmomente einiger Körper berechnen.
Das Trägheitsmoment einer Hantel : Zwei punktförmige Massen m
seien durch eine Stange der Länge l verbunden, siehe Abb. 8.4. Die Masse
der Stange sei vernachlässigbar. Die Drehachse befinde sich in der Mitte der
Stange und verlaufe senkrecht zu ihr. Das Trägheitsmoment berechnet sich
gemäß Gl. (8.9) zu
l
J =m
2
!2
l
+m
2
!2
1
= ml2 .
2
Zur Berechnung des Trägheitsmomentes von ausgedehnten Körpern mit
kontinuierlicher Masseverteilung muß man in Gl. (8.9) die Summe über die
Teilmassen durch das Integral
J=
Z
m
R2 dm
103
8.3 Berechnung von Trägheitsmomenten
z
j
6
l
2
m
j
l
2
m
Abbildung 8.4: Zur Berechnung des Trägheitsmoments einer Hantel“, beste”
hend aus zwei punktförmigen Massen m, verbunden durch eine Stange vernachlässigbarer Masse
ersetzen. Als Beispiel hierfür wollen wir zunächst das Trägheitsmoment eines
homogenen Stabes berechnen bezüglich einer Drehachse, die senkrecht zum
Stab durch seinen Schwerpunkt geht.
Das Trägheitsmoment eines homogenen Stabes : In Abb. 8.5 ist
ein homogener Stab der Länge l und der Masse m dargestellt. Die z-Achse
sei so orientiert, daß sie mit der senkrecht durch den Schwerpunkt gehenden
Drehachse zusammenfällt. Die x-Achse verlaufe durch den Stab. Das herausz
6
dm
x - dx
l
2
-
l
2
-
Abbildung 8.5: Zur Berechnung des Trägheitsmoments eines homogenen Stabes
gegriffene Stabelement der Länge dx hat die Masse
dm = m
dx
l
104
8 Dynamik des starren Körpers
und den Abstand x von der Drehachse. Für das Trägheitsmoment ergibt sich
damit
J =
Z
2
x dm
=
m
m x3
=
l 3
"
#l/2
Z
−l/2
=
−l/2
l/2
x
2
m
l
dx
1
ml2 .
12
Drückt man das Massenelement dm durch das Produkt aus Dichte ̺ und
Volumenelement dV aus, also dm = ̺ dV , so ergibt sich für das Trägheitsmoment eines Körpers allgemein
J=
Z
R2 ̺ dV .
(8.11)
V
Wir benutzen diese Beziehung bei der Berechnung der Trägheitsmomente der
folgenden dreidimensionalen Körper.
Das Trägheitsmoment eines homogenen Hohlzylinders : Man betrachte den in Abb. 8.6 dargestellten homogenen Hohlzylinder mit dem Außenradius R2 und dem Innenradius R1 . Wir wollen das Trägheitsmoment berechnen bezüglich der durch die Zylindermitte verlaufenden Symmetrieachse.
Man denke sich dazu den Zylinder zerlegt in einzelne sehr dünnwandige Hohlzylinder mit der Wanddicke dR und dem Volumen dV = 2πRh dR. Gl. (8.11)
h
R
R2
R1
'$
#
6
r -
dR
?
"!
&%
Abbildung 8.6: Zur Berechnung des Trägheitsmoments eines Hohlzylinders
105
8.3 Berechnung von Trägheitsmomenten
liefert dann
J =
Z
R2 ̺ dV
=
̺
V
= 2π̺h
=
Z
R2
R1
Z
R2
R1
R2 2πRh dR
#R
R4 2
= 2π̺h
4 R1
1
=
m(R22 + R12 ) .
2
"
3
R dR
1
π̺h(R24 − R14 )
2
Die letzte Gleichheit ergibt sich daraus, daß für die Gesamtmasse des Hohlzylinders gilt m = ̺π(R22 − R12 )h.
Das Trägheitsmoment eines Quaders : Berechnet werden soll das
Trägheitsmoment eines Quaders mit den Kantenlängen a, b, c um eine zur Kante c parallele Achse durch den Schwerpunkt, siehe Abb. 8.7.
z
6
y
-
x
c
b
a
Abbildung 8.7: Zur Berechnung des Trägheitsmoments eines Quaders
Es ergibt sich
J =
Z
2
R ̺ dV
=
V
= ̺
̺
Z
(x2 + y 2 ) dV
V
Z
a/2
−a/2
Z
−b/2
x3
= ̺ bc
3
"
b/2
Z
#a/2
c/2
−c/2
(x2 + y 2 ) dx dy dz
y3
+ ac
3
−a/2
"
#b/2
−b/2
106
8 Dynamik des starren Körpers
b3
a3
= ̺ bc + ac
12
12
1
=
m(a2 + b2 ) .
12
!
1
̺abc(a2 + b2 )
12
=
Die letzte Gleichheit ergibt sich daraus, daß für die Gesamtmasse des Quaders
gilt m = ̺abc.
8.4
Beispiele zur Drehbewegung des starren
Körpers
Beispiel 1 : Winkelbeschleunigung eines Zylinders infolge eines Drehmoments. Man betrachte die in Abb. 8.8 dargestellte Anordnung. Ein homogener
Zylinder der Masse mR ist so angebracht, daß er sich um seine Symmetrieachse
drehen kann. Die Drehachse ist horizontal gerichtet, und das Drehmoment entsteht durch die herabhängende Masse m. Der Faden, an dem die Masse hängt,
ist zu Beginn auf dem Zylinder aufgerollt und wickelt sich bei der einsetzenden Drehbewegung ab. Gefragt ist nach der Winkelbeschleunigung α des Zylinders. Das Trägheitsmoment eines Zylinders ist gegeben durch J = 12 mR R2 .
mR r
R
R
Fs
?
6
Fs
a ?
m
mg
?
Abbildung 8.8: Ein Zylinder rotiert frei um eine horizontale Achse. Er erfährt
ein Drehmoment infolge der Spannung des Fadens, an dem die Masse m hängt.
8.4 Beispiele zur Drehbewegung des starren Körpers
107
Sein Drehimpuls ist folglich
1
Lz = Jω = mR R2 ω .
2
Wir wollen nun das Drehmoment berechnen, daß durch die Spannung Fs des
Fadens hervorgerufen wird. Die Spannung Fs ergibt sich, wenn man die NEWTONsche Bewegungsgleichung für die Masse m hinschreibt
ma = mg − Fs ,
also
Fs = m(g − a) .
Für das Drehmoment Mz folgt damit
Mz = RFs = m(g − a)R .
Die Bewegungsgleichung L̇z = Mz liefert
1
mR R2 ω̇ = m(g − a)R .
2
(8.12)
Aus v = Rω folgt durch Differentiation nach der Zeit a = Rω̇ = Rα. Setzt man
dies in Gl. (8.12) ein, so ergibt sich die Winkelbeschleunigung des Zylinders zu
α=
m
mR
+m
2
!
g
.
R
Mit dieser Anordnung kann man umgekehrt durch Messung von α bzw. a
unbekannte Trägheitsmomente ermitteln.
Beispiel 2 : Rollen ohne Gleiten auf einer schiefen Ebene. Man betrachte
die in Abb. 8.9 dargestellte Anordnung. Ein Walze mit dem Trägheitsmoment
J möge auf einer schiefen Ebene hinunterrollen, deren Neigungswinkel θ sei.
Gesucht ist die Translationsbeschleunigung der Bewegung. Eine Möglichkeit,
diese zu berechnen, ist dadurch gegeben, vom Energiesatz auszugehen. Die
Gesamtenergie der Walze besteht zu jedem Zeitpunkt aus drei Beiträgen:
1. die kinetische Energie der Translationsbewegung des Schwerpunktes
1
mv 2 ,
2
2. die kinetische Energie der Drehbewegung um den Schwerpunkt 21 Jω 2 ,
3. die potentielle Energie des Schwerpunktes mgh,
108
8 Dynamik des starren Körpers
ω
R
~
a
q
R
~
v
q
h
θ
Abbildung 8.9: Abrollen einer Walze auf einer schiefe Ebene
wobei h die momentane Höhe über einem beliebig gewählten Niveau ist, dem
die potentielle Energie Null zugeordnet wird. Da die Walze auf der Unterlage
abrollt, ist ihre Translationsgeschwindigkeit v mit ihrer Winkelgeschwindigkeit ω verküpft durch v = ωR. Der Energiesatz liefert, daß die Gesamtenergie
1
J
E=
m + 2 v 2 + mgh
2
R
zeitlich konstant ist. Differentiation dieser Gleichung nach der Zeit ergibt
dv
J
dh
dE
= m + 2 v + mg
=0.
dt
R
dt
dt
Mit dh/dt = −v sin θ und dv/dt = a erhält man
J
m + 2 va − mgv sin θ = 0 .
R
Division durch v und Auflösen nach a ergibt die gesuchte Translationsbeschleunigung
1
a=
J g sin θ .
1 + mR
2
Mit der Beziehung v = ωR läßt sich der Energiesatz auch in der Form
E=
1
mR2 + J ω 2 + mgh
2
8.5 Lagermomente bei der Drehung um eine feste Achse
109
schreiben. Der in den Klammern stehende Ausdruck ist aber nach dem STEINERschen Satz gerade das Trägheitsmoment der Walze um den jeweiligen
Auflagepunkt auf der schiefen Ebene. Wir können also das Abrollen der Walze
auf der schiefen Ebene auffassen entweder als Kombination aus der Translationsbewegung des Schwerpunktes und der Drehbewegung um den Schwerpunkt
oder als reine Drehbewegung um den momentanen Auflagepunkt.
8.5
Lagermomente bei der Drehung um eine
feste Achse
In den vorigen Abschnitten haben wir uns mit der Drehung eines starren
Körpers um eine raumfeste Achse beschäftigt. Dabei mußten wir nur die Kom~ parallel zur Drehachse betrachten und die entponente des Drehimpulses L
~ . Die Bewegungsgleichung war
sprechende Komponente des Drehmomentes M
einfach durch die skalare Gleichung L̇z = Mz gegeben. Für eine genauere Betrachtung müssen wir aber berücksichtigen, daß im allgemeinen der Drehimpuls
~ nicht parallel zur Drehachse sein wird, wenn die Drehachse nicht gerade mit
L
einer der Symmetrieachsen des starren Körpers zusammenfällt.
Das einfachste Beispiel für dieses allgemeine Problem ist ein hantelförmiger
starrer Körper, bestehend aus zwei gleichen Massen, die durch einen masselosen
Stab verbunden sind. Dieser möge um eine feste Achse durch den Schwerpunkt
rotieren, die den konstanten Winkel θ mit dem Stab einschließt. Die Drehachse
soll wie üblich mit der z-Achse eines raumfesten Koordinatensystems zusammenfallen. Abb. 8.10 zeigt diesen starren Körper in einem Augenblick seiner
Drehbewegung, in dem der Stab in der x, z-Ebene liegt. Der Stab habe die
Länge 2a, und seine Winkelgeschwindigkeit ω
~ sei konstant und zeige in Richtung der positiven z-Achse. Nach der allgemeinen Definition ist der Drehimpuls
gegeben durch
~ = ~r1 × m ~v1 + ~r2 × m ~v2 = ~r1 × m(~ω × ~r1 ) + ~r2 × m(~ω × ~r2 ) .
L
Das Teilchen im ersten Quadranten ist dabei mit 1, das andere mit 2 bezeichnet, so daß gilt
~r1 = a sin θ ~ex + a cos θ ~ez ,
~r2 = −a sin θ ~ex − a cos θ ~ez ,
ω
~ = ω ~ez .
(8.13)
(8.14)
(8.15)
~ erhalten wir daher
Für L
~ = 2mωa2 sin θ(sin θ ~ez − cos θ ~ex ) .
L
(8.16)
110
8 Dynamik des starren Körpers
z
~
L
o
S
S
S
S
S
6
1
~
6ω
S
S θ
S
m
a
a
-
x
m 2
Abbildung 8.10: Drehbewegung eines hantelförmigen starren Körpers um eine
raumfeste Achse. Der masselose Verbindungsstab und die Drehachse schließen
den festen Winkel θ ein.
Der Vektor des Drehimpulses steht zum Stab senkrecht, seine Richtung ist in
Abb. 8.10 dargestellt. Er rotiert um die z-Achse, wobei er immer die gleiche
~ bewegt
Beziehung zum Stab und zur Drehachse beibehält. Das bedeutet, L
sich auf einem Kegelmantel um die z-Achse. Seine Zeitableitung ist somit nicht
Null, sondern es gilt
~˙ = ω
~
L
~ ×L
(8.17)
in Analogie zu der früher abgeleiteten Gl. (4.7)
~v = ~r˙ = ω
~ × ~r .
Aus den Gln. (8.15) und (8.16) erhalten wir für das Vektorprodukt in Gl. (8.17)
~˙ = −2mω 2 a2 sin θ cos θ ~ey ,
L
wobei ~ey in Abb. 8.10 in die Zeichenebene hineinzeigt.
~˙ nicht gleich Null ist, so besagt die allgemeine BewegungsgleiWenn aber L
~˙ = M
~ , daß ein Drehmoment vorhanden sein muß, welches die zeitliche
chung L
Änderung des Drehimpulses hervorruft. In dem in Abb. 8.10 dargestellten Augenblick wirkt also das Drehmoment
~ = −2mω 2 a2 sin θ cos θ ~ey ,
M
(8.18)
8.5 Lagermomente bei der Drehung um eine feste Achse
111
welches aus der Zeichenebene herauszeigt. Bei der Drehung rotiert es ebenso
~ mit dem Stab um die z-Achse. Dieses rotierende Drehmoment muß von
wie L
den Lagern aufgebracht werden, die den Stab festhalten und seine Bewegung
auf eine Drehung um die z-Achse mit dem festen Winkel θ einschränken. Es
wird als Lagermoment bezeichnet.
Die Ursache dieses Lagermoments ist einfach zu sehen, wenn wir die Zentripetalkräfte betrachten, die erforderlich sind, um die beiden Teilchen der Masse
m auf ihrer Kreisbahn um die z-Achse zu halten. Auf Teilchen 1 bzw. 2 müssen
die Zentripetalkräfte
F~1 = −mω 2 a sin θ ~ex ,
F~2 = mω 2 a sin θ ~ex
wirken. Das Drehmoment dieser beiden entgegengesetzt gerichteten Zentripetalkräfte ergibt sich aber mit den Gln. (8.13) und (8.14) zu
~ = ~r1 × F~1 + ~r2 × F~2 = −2mω 2 a2 sin θ cos θ ~ey .
M
Das Lagermoment ist also das Drehmoment der Zentripetalkräfte, die zur Aufrechterhaltung der Drehung mit dem festen Winkel θ notwendig sind.
Man kann den Vorgang auch aus einem mitrotierenden Bezugssystem betrachten. In diesem Fall ließe sich das Auftreten des Lagermomentes folgendermaßen erklären: An beiden Massen wirken auf Grund der Rotation die
entsprechenden Zentrifugalkräfte −F~1 und −F~2 . Das Drehmoment dieser Zentrifugalkräfte muß gerade durch das Lagermoment kompensiert werden.
Wir halten weiter fest, daß, wenn der Stab mit der Drehachse einen Winkel
~ parallel zur Winkelgeschwindigkeit ω
von θ = 90◦ bildet, der Drehimpuls L
~
liegt und die gleiche Richtung hat. Nur in diesem Fall ist der Drehimpuls zeitlich konstant, und gemäß Gl. (8.18) tritt kein Lagermoment auf. In der Technik
sagt man in diesem Fall, der Körper sei ausgewuchtet“. Er ist statisch ausge”
wuchtet, wenn die Drehachse durch den Schwerpunkt geht, was wir in unserem
Beispiel bereits vorausgesetzt haben. Er ist außerdem dynamisch ausgewuchtet, wenn keine Lagermomente auftreten. Ein Tankwart wuchtet zum Beispiel
ein Autorad statisch aus, indem er prüft, ob das Rad in jeder Winkelstellung
immer im Gleichgewicht ist. Ist das nicht der Fall, so bringt er so lange zusätzliche Massen an der Felge an, bis der Schwerpunkt auf der Achse liegt. Er
wuchtet es dynamisch aus, indem er das Rad rotieren läßt und die Lagermomente prüft. Die zur Korrektur notwendigen Zusatzmassen müssen jetzt so
angebracht werden, daß sich der Schwerpunkt des Rades nicht mehr ändert.
Dies wird so lange fortgesetzt, bis auch die Lagermomente verschwinden.
112
8 Dynamik des starren Körpers
Kapitel 9
Die Temperatur und der Begriff
des idealen Gases
9.1
Die Temperatur
Mittels unseres Tastsinns können wir feststellen, ob ein Körper heißer oder
kälter ist als ein anderer. Bei der Festlegung der Temperatur will man diese subjektive Empfindung ersetzen durch eine objektiv meßbare physikalische
Größe.
Eine Temperaturskala läßt sich festlegen, indem man eine Eigenschaft einer
Substanz ausnutzt, die sich eindeutig mit der Temperatur ändert. ANDERS
CELSIUS (1701 - 1744) verwendete die Längenänderung einer Quecksilbersäule
zur Temperaturmessung und legte die Skala wie folgt fest: Dem Eispunkt des
reinen Wassers (bei 101 325 Pa) wird die Temperatur 0 ◦ C, dem Siedepunkt
des reinen Wassers (bei 101 325 Pa) die Temperatur 100 ◦ C zugeordnet. Zwischen diesen Fixpunkten wird linear interpoliert. Über diese Punkte hinaus
werden Temperaturen durch lineare Extrapolation bestimmt. Die CELSIUSTemperatur wird mit ϑ bezeichnet.
Man muß sich aber darüber klar sein, daß eine so festgelegte Temperaturskala von der gewählten Substanz abhängt, und Messungen basierend auf
dieser Skala müssen nicht übereinstimmen mit Messungen, die auf einer anders definierten Temperaturskala beruhen. Die Verwendung anderer Thermometerfüllungen führt bei linearer Interpolation zwischen den beiden Fixpunkten im allgemeinen zu unterschiedlichen Temperaturskalen. Man ist deshalb
bestrebt, zu einer anderen von einer speziellen Substanz unabhängigen Temperaturdefinition zu kommen. Der entscheidende Punkt ist aber, daß das Formulieren allgemeingültiger physikalischer Gesetze nur möglich sein wird mit
einer Temperaturdefinition, die von den stofflichen Eigenschaften einer spezi113
114
9 Die Temperatur und der Begriff des idealen Gases
ellen Substanz unabhängig ist. Wir beschreiten deshalb den folgenden Weg für
die Festlegung einer Temperaturskala.
Wir betrachten den Druck, den ein Gas ausübt. Der Druck ist definiert als
der Quotient aus der Kraft und der Fläche, auf welche die Kraft senkrecht
wirkt. Die Einheit des Drucks ist 1 Pascal (Pa), wobei aus der Definition folgt
1 Pa = 1 N m−2 . Häufig wird auch die Einheit 1 bar = 105 Pa verwendet.
Wir benutzen nun die Tatsache, daß bei einem Gas, welches ein konstantes
Volumen einnimmt, der Druck zunimmt, wenn die Temperatur erhöht wird.
Als Einheit für die Temperatur wird 1 Kelvin (K) vereinbart. Man legt dann
eine Temperatur willkürlich fest. Nach einer internationalen Übereinkunft ordnet man dem Tripelpunkt des Wasser die Temperatur T3 = 273, 16 K zu. Der
Tripelpunkt ist der Zustand, in dem alle drei Phasen, also die gasförmige, die
flüssige und die feste Phase im Gleichgewicht koexistieren. Man betrachtet nun
eine bestimmte Menge irgendeines Gases, das in einem Gefäß mit konstantem
Volumen eingeschlossen ist. Bringt man das Gefäß mit dem Gas in thermischen Kontakt mit Wasser am Tripelpunkt, so übt das Gas einen bestimmten
Druck p3 aus, den man mit einer geeigneten Meßanordnung ablesen kann. Als
nächstes bringt man das Gefäß mit dem Gas in thermischen Kontakt mit dem
Körper, dessen Temperatur man bestimmen will, und ermittelt den Druck p,
den das Gas nun ausübt. Die Temperatur T des Körpers könnte man dann
mittels der folgenden vorläufigen Definition festlegen
p
p
= (273, 16 K)
.
(9.1)
T := T3
p3
p3
Ein Meßgerät, welches die Temperatur nach diesem Prinzip mißt, wird als
Gasthermometer bezeichnet. Der Aufbau eines solchen Gasthermometers ist
in Abb. 9.1 dargestellt. In dem Gefäß G befindet sich eine bestimmte Menge
irgendeines Gases. Über eine Kapillare steht das Gas in Verbindung mit einem Ausgleichsrohr, in dem sich eine Flüssigkeit befindet. Durch Heben oder
Senken des rechten Schenkels wird der Flüssigkeitsbestand so geregelt, daß der
Meniskus links immer mit einer bestimmten Markierung S übereinstimmt. Dadurch ist sichergestellt, daß das Gas bei jeder Temperatur das gleiche Volumen
einnimmt. Um nun die Temperatur eines Körpers zu messen, wird dieser mit
dem Gefäß G in Berührung gebracht und gewartet, bis sich ein thermisches
Gleichgewicht eingestellt hat. Aus der Höhe h der Flüssigkeitssäule im rechten
Schenkel kann man direkt den Druck p bestimmen, den das Gas ausübt, denn
es gilt
p = p0 + ̺gh .
Dabei ist p0 der atmosphärische Druck und ̺ die Dichte der verwendeten
Flüssigkeit. Mit Gl. (9.1) ergibt sich dann die Temperatur T des Körpers.
115
9.1 Die Temperatur
6
h
'$
S
?
G
&%
Abbildung 9.1: Schematische Darstellung eines Gasthermometers
Die Definition der Temperatur in Gl. (9.1) kann noch nicht die endgültige
sein, da die so festgelegte Temperatur immer noch abhängen würde von der Art
des verwendeten Gases und von der Menge des in dem Gefäß G befindlichen
Gases. Erniedrigt man aber den Druck des Gases immer weiter, z.B. dadurch,
daß man bei konstantem Volumen eine immer geringere Gasmenge verwendet,
so zeigt sich, daß die Beziehung in Gl. (9.1) unabhängig vom verwendeten
Gas immer den gleichen Wert für die Temperatur T liefert. Man hat also in
Gl. (9.1) den Grenzübergang p → 0 zu bilden und erhält somit als Definition
für die Temperatur T
p
T := (273, 16 K) lim
p→0 p3
!
.
(9.2)
Hierbei ist zu beachten, daß beim Grenzübergang p → 0 natürlich auch p3 → 0
gilt. Entscheidend ist also, gegen welchen Grenzwert der Quotient p/p3 strebt
für p → 0. Die gemäß Gl. (9.2) definierte Temperatur ist von den Eigenschaften
eines speziellen Gases unabhängig. Sie hängt nur ab von allgemeinen Eigenschaften, die alle realen Gase haben, wenn der Druck gegen Null geht. Das
Gas, dem sich in ihrem Verhalten alle realen Gase im Grenzübergang p → 0
nähern, wird als das ideale Gas bezeichnet. Eine genaue Charakterisierung des
116
9 Die Temperatur und der Begriff des idealen Gases
idealen Gases vom mikroskopischen Standpunkt aus ist im nächsten Kapitel
dargestellt. Die Definition der Temperatur T in Gl. (9.2) hängt somit nur von
den Eigenschaften des idealen Gases ab. Wir werden später sehen, daß die so
festgelegte Temperaturskala identisch ist mit der sogenannten thermodynamischen Temperaturskala, welche von den stofflichen Eigenschaften irgendeiner
Substanz völlig unabhängig ist. Wir werden deshalb die oben definierte Temperatur T bereits ab jetzt als thermodynamische Temperatur bezeichnen.
Die CELSIUS-Temperaturskala ist heute nicht mehr festgelegt über die ursprüngliche Definition, sondern über die thermodynamische Temperaturskala.
Bezeichnen wir die CELSIUS-Temperatur mit ϑ und die thermodynamischen
Temperatur mit T , so gilt heute per definitionem
0
C
− 273, 15 0 C .
K
Im folgenden sind noch zwei Gesetze aufgeführt, die das Verhalten von Gasen beschreiben. Es zeigt sich im Experiment, daß bei einem Gas das Volumen
V linear mit der Temperatur T zunimmt, wenn der Druck p konstant gehalten
wird. Dies ist um so besser erfüllt, je geringer der Druck des Gases ist. Dieses
Gesetz, das zuerst von GAY-LUSSAC entdeckt wurde, läßt sich schreiben in
der Form
V0
V
=
für
p = const. .
T
T0
Dabei ist V0 das Volumen, das das betreffende Gas bei der Temperatur T0 und
dem konstanten Druck p einnimmt.
Eine weitere Gesetzmäßigkeit läßt sich feststellen, wenn man die Abhängigkeit des Drucks eines Gases vom Volumen bei konstanter Temperatur untersucht. Es gilt das BOYLE-MARIOTTEsche Gesetz
ϑ=T
pV = p0 V0
für
T = const. .
Dabei ist V0 das Volumen, das das betreffende Gas bei dem Druck p0 und der
konstanten Temperatur T einnimmt. Auch dieses Gesetz ist bei realen Gasen
um so genauer erfüllt, je kleiner der Druck ist. Im p, V -Diagramm läßt sich das
BOYLE-MARIOTTEsche Gesetz durch eine Schar von Hyperbeln darstellen,
wobei die Temperatur T der Scharparameter ist. Diese Hyperbeln werden als
Isothermen bezeichnet, da sie Zustände gleicher Temperatur bedeuten.
Wie bereits erwähnt, gelten beide Gesetze um so besser, je geringer der
Gasdruck ist. Im Grenzübergang p → 0 gelten sie für alle Gase exakt. Das
Gas, dem sich in ihrem Verhalten alle realen Gase im Grenzübergang p → 0
nähern, haben wir oben als das ideale Gas eingeführt. Für das ideale Gas gelten
das GAY-LUSSACsche und das BOYLE-MARIOTTEsche Gesetz somit per
definitionem streng.
117
9.2 Die Zustandsgleichung des idealen Gases
9.2
Die Zustandsgleichung des idealen Gases
Bei den beiden obigen Gesetzen muß jeweils eine Größe, entweder der Druck
p oder die Temperatur T , konstant gehalten werden. Man kann nun aus dem
GAY-LUSSACschen und dem BOYLE-MARIOTTEschen Gesetz eine Gleichung ableiten, die bei gleichzeitiger Änderung von Druck, Volumen und Temperatur gilt. Wir betrachten dazu die Zustandsänderung des idealen Gases von
einem Anfangszustand p0 , V0 , T0 zu einem beliebigen Endzustand p, V, T , siehe
Abb. 9.2. Wir führen die Zustandsänderung in zwei Schritten durch. Im ersten
p
6
p
T
T0
p0
-
V
′
V
V0
V
Abbildung 9.2: Zur Herleitung der Zustandsgleichung des idealen Gases
Schritt wird bei konstanter Temperatur T0 der Druck von p0 auf p erhöht. Dabei ändert sich das Volumen auf V ′ , und nach dem BOYLE-MARIOTTEschen
Gesetz gilt
p0 V0 = pV ′ .
(9.3)
Im zweiten Schritt wird das Gas bei konstantem Druck p von der Temperatur
T0 auf die Temperatur T erwärmt. Dabei ändert sich das Volumen von V ′ auf
V , und nach dem GAY-LUSSACschen Gesetz gilt
V
V′
=
.
T0
T
(9.4)
118
9 Die Temperatur und der Begriff des idealen Gases
Löst man Gl. (9.3) nach V ′ auf und setzt in Gl. (9.4) ein, so ergibt sich
p0 V0
pV
=
T
T0
(9.5)
oder
pV
=C.
T
C ist dabei eine Konstante, die sicher von der Menge des betrachteten Gases
abhängt, aber auch noch von der Gassorte abhängen könnte. Bei der genauen
Festlegung der Konstanten C hilft uns folgender erstaunliche Satz von AVOGADRO :
Bei gleicher Temperatur und gleichem Druck enthalten gleiche Volumina verschiedener Gase dieselbe Anzahl von Teilchen.
Auch dieser Satz gilt um so besser, je geringer der Druck der Gase ist. Je
nachdem, ob das Gas aus Atomen oder Molekülen besteht, sind unter Teilchen
die Atome oder Moleküle zu verstehen. AMADEO AVOGADRO (1776 - 1856)
hat diesen Satz aus der Beobachtung chemischer Reaktionen, die in der Gasphase ablaufen, abgeleitet. So verbinden sich bei gleichem Druck und gleicher
Temperatur z.B. zwei Volumeneinheiten H2 mit einer Volumeneinheit O2 zu
exakt zwei Volumeneinheiten H2 O (oberhalb 100 ◦ C).
Bezieht man sich nun auf irgendeinen Druck p0 und auf irgendeine Temperatur T0 , so befinden sich in ein und demselben Volumen V0 bei allen Gasen
nach dem Satz von AVOGADRO gleichviele Teilchen N . Dividiert man beide
Seiten der Gl. (9.5) durch N , so ergibt sich auf der rechten Seite eine von der
Gassorte unabhängige Konstante k, d.h.
p0 V0
pV
=
=k.
TN
T0 N
(9.6)
Die Konstante k ist die zentrale Naturkonstante der Thermodynamik und wird
nach dem österreichischen Physiker LUDWIG BOLTZMANN (1844 - 1906) als
BOLTZMANN-Konstante bezeichnet. Sie hat den Wert
k = (1, 380658 ± 0, 000012) 10−23 J K−1 .
Gl. (9.6) stellt die Zustandsgleichung des idealen Gases dar. Sie wird üblicherweise in der Form
pV = N kT
(9.7)
geschrieben. Für viele Rechnungen ist die Zustandsgleichung in dieser Form
etwas unhandlich, da die Teilchenzahl sehr groß und die BOLTZMANNKonstante sehr klein ist. Man führt deshalb den Begriff der Stoffmenge ν ein:
119
9.2 Die Zustandsgleichung des idealen Gases
Die Stoffmenge ν eines Systems bestimmter Zusammensetzung ist
festgelegt durch Anzahl der in ihm enthaltenen Teilchen.
Für die Einheit der Stoffmenge gilt:
Die Einheit der Stoffmenge ist das Mol (Einheitszeichen: mol), also
[ν] = mol .
1 Mol ist die Stoffmenge eines Systems bestimmter Zusammensetzung, das aus ebensoviel Teilchen besteht, wie Atome in 12 Gramm
des Kohlenstoffnuklids 12 C enthalten sind.
Die Zahl der Atome, die in 12 Gramm des Kohlenstoffnuklids 12 C enthalten
sind, wird AVOGADRO-Konstante genannt und mit NA bezeichnet. Eine genaue Bestimmung von NA ist aus kristallchemischen Daten möglich. Als bester
Wert gilt heute:
NA = (6, 0221367 ± 0, 0000036) 1023 mol−1 .
Die Zahl der Teilchen läßt sich dann in Vielfachen von NA , also durch die
Stoffmenge ν, ausdrücken
N = νNA .
Setzt man dies in die Zustandsgleichung des idealen Gases ein, so gilt
pV = νNA kT .
Es ist zweckmäßig, die universelle Gaskonstante R einzuführen als das Produkt
aus der AVOGADRO-Konstanten NA und der BOLTZMANN-Konstanten k
R = NA k = (8, 314510 ± 0, 000070) J mol−1 K −1 .
Wir erhalten die Zustandsgleichung des idealen Gases damit in der Form
pV = νRT .
Die Stoffmenge ν ist in der Praxis einfach zu ermitteln. Man benötigt dazu
außer der Masse m die Molmasse Mmol der untersuchten Substanz. Sie ist
definiert als die Masse, die einem Mol der Substanz entspricht. Ist m0 die
Masse eines Teilchens (Atoms oder Moleküls), so gilt
Mmol = NA m0 .
(9.8)
120
9 Die Temperatur und der Begriff des idealen Gases
Die Einheit der Molmasse ist [Mmol ] = kg/mol. Sie wird auch häufig in g/mol
angegeben. Für die Stoffmenge ν ergibt sich dann
ν=
m
,
Mmol
d.h. die Stoffmenge einer Substanz ist der Quotient aus ihrer Masse und ihrer
Molmasse.
Die Molmasse wiederum läßt sich gemäß Gl. (9.8) direkt aus der Atom- bzw.
Molekülmasse bestimmen. Wegen der Kleinheit der Massen ist es üblich, die
Massen von Atomen und Molekülen in Vielfachen der atomaren Masseneinheit
u anzugeben. Diese ist definiert durch:
1 atomare Masseneinheit (Formelzeichen u) ist der 12te Teil der
Masse eines Atoms des Kohlenstoffnukleids 12 C.
Für die so definierte atomare Masseneinheit gilt
1u = (1, 6605402 ± 0, 0000010) 10−27 kg .
Weiter ist festgelegt:
Unter der relativen Atommasse Ar bzw. der relativen Molekülmasse
Mr versteht man das Verhältnis aus der Masse eines Atoms bzw.
Moleküls dieser Substanz und der atomaren Masseneinheit 1 u.
Mit den so definierten Größen ergibt sich direkt folgender Zusammenhang:
Der Zahlenwert der in g/mol angegebenen Molmasse ist gleich dem
der relativen Atommasse bzw. der relativen Molekülmasse der Substanz, in Zeichen
Mmol = Ar
g
mol
bzw.
Mmol = Mr
g
.
mol
Die relativen Atom- bzw. Molekülmassen sind aus dem Periodensystem der
Elemente zu entnehmen bzw. zu berechnen.
Kapitel 10
Kinetische Gastheorie
Wir betrachten im folgenden ein ideales Gas im thermodynamischen Gleichgewicht. Vom mikroskopischen Standpunkt aus läßt sich das ideale Gas definitionsgemäß durch folgende Annahmen beschreiben:
1. Die Bewegung der Teilchen ist völlig ungeordnet und gehorcht den NEWTONschen Axiomen. Die Teilchen bewegen sich in alle Raumrichtungen
mit verschiedener Geschwindigkeit. Ihre mikroskopische Bewegung gehorcht den Gesetzen der NEWTONschen Mechanik.
2. Es gibt eine stationäre Geschwindigkeitsverteilung. Richtung und Betrag
der Geschwindigkeit eines Teilchens werden bei jedem Stoß mit einem
anderen Teilchen oder mit der Wand abrupt geändert. Jedes Teilchen
bewegt sich somit auf einem Zickzackkurs durch das Gas. Wir setzen
voraus, daß die Anzahl der Teilchen sehr groß ist. Die damit verbundene
große Zahl von Stößen pro Zeiteinheit bewirkt dann, daß die Bewegung
stets ungeordnet bleibt und eine konstante Geschwindigkeitsverteilung
aufrecht gehalten wird. Zu jedem Zeitpunkt haben immer gleich viele
Teilchen gleiche Geschwindigkeiten.
3. Das Volumen der Teilchen ist vernachlässigbar gegenüber dem Volumen,
in dem sie sich bewegen. Daß diese Annahme in guter Näherung erfüllt
ist, zeigt ein Vergleich der Dichten von Gasen und Flüssigkeiten.
4. Nur bei den Zusammenstößen wirken Kräfte zwischen den Teilchen. Zwischen den Stößen bewegen sich die Teilchen daher mit konstanter Geschwindigkeit.
5. Die Stöße sind elastisch und von vernachlässigbarer Dauer . Wir nehmen also an, daß bei den Stößen der Teilchen untereinander oder bei
121
122
10 Kinetische Gastheorie
den Stößen mit der Wand die gesamte Energie und der gesamte Impuls erhalten bleiben. Wir nehmen weiter an, daß die Dauer der Stöße
vernachlässigbar klein ist verglichen mit der Zeitspanne zwischen zwei
Stößen. Insbesondere setzt sich dann die Zeit, in der ein Teilchen einen gewissen Weg zurücklegt, additiv aus den Zeitspannen zwischen den Stößen
zusammen.
Wir wollen nun, ausgehend von der Bewegung der einzelnen Teilchen, zusammen mit den obigen Annahmen den Druck eines idealen Gases berechnen.
Wir denken uns das Gas in einem Würfel mit der Kantenlänge l eingeschlossen,
siehe Abb. 10.1. Die beiden Flächen senkrecht zur x-Achse werden mit A1 und
y
6
A2
A1
:
b~
v
z
-
x
l
Abbildung 10.1: Zur Berechnung des Drucks eines idealen Gases
A2 bezeichnet. Die Masse der Teilchen sei m0 . Wir betrachten ein willkürlich
herausgegriffenes Teilchen, welches die Geschwindigkeit ~v haben möge. Die
Komponenten der Geschwindigkeit ~v sind vx , vy , vz . Wenn das Teilchen mit
der Wand A1 zusammenstößt, erfährt es eine Impulsänderung von
Impuls nachher − Impuls vorher = −m0 vx − (m0 vx ) = −2m0 vx .
Die Impulskomponenten in y- und z-Richtungen bleiben ja bei einem Stoß mit
der Wand A1 unverändert. Wegen der Impulserhaltung bedeutet dies, daß auf
die Wand der Impuls 2m0 vx übertragen wird. Zunächst werden Stöße zwischen
den Teilchen vernachlässigt. Um von der Seite A2 nach A1 zu gelangen und
123
wieder zurück, benötigt das Teilchen die Zeit 2l/vx . Das Teilchen gibt also pro
Zeiteinheit den Impuls
m0 vx2
vx
2m0 vx =
2l
l
an die Wand ab. Wegen der NEWTONschen Bewegungsgleichung F = dp/dt
ist dies gerade die Kraft, die das betrachtete Teilchen infolge der Stöße auf die
Wand A1 ausübt. Die gesamte von allen Teilchen auf die Wand ausgeübte Kraft
ergibt sich dann durch Aufsummation der Beiträge m0 vx2 /l für alle Teilchen.
Um den Druck zu berechnen, muß die gesamte Kraft lediglich noch durch die
Größe der Fläche A1 = l2 dividiert werden. Sei also ~vi die Geschwindigkeit
des i-ten Teilchens mit den Komponenten vix , viy , viz . Befinden sich in dem
Quader insgesamt N Teilchen, so ist der von dem Gas auf die Wand ausgeübte
Druck
m0 2
2
2
+ v2x
+ · · · + vN
p = 3 (v1x
x) .
l
Mit Hilfe der Teilchenzahldichte n = N/V = N/l3 , bzw. l3 = N/n ergibt sich
p = nm0
2
2
2
v1x
+ v2x
+ · · · + vN
x
N
!
.
Der Ausdruck in den Klammern ist der Mittelwert der quadrierten Geschwindigkeitskomponenten in x-Richtung. Wir bezeichnen ihn mit
hvx2 i
=
2
2
2
v1x
+ v2x
+ · · · + vN
x
N
!
.
Die Gleichung für den Druck p läßt sich damit schreiben als
p = nm0 hvx2 i .
2
2
2
Für die Geschwindigkeit jedes Teilchens gilt vi2 = vix
+ viy
+ viz
. Da wir eine völlig ungeordnete Bewegung in alle Raumrichtungen angenommen haben,
2
2
2
müssen die Mittelwerte über vix
, viy
und viz
gleich sein, also
hvx2 i = hvy2 i = hvz2 i .
(10.1)
Weiter gilt
1 2
2
2
2
2
2
+ · · · + vN
+ v1z
(v + v1y
x + vN y + vN z )
N 1x
1 2
1 2
1 2
2
2
2
=
(v1x + · · · + vN
(v1y + · · · + vN
(v + · · · + vN
x) +
y) +
z)
N
N
N 1z
= hvx2 i + hvy2 i + hvz2 i ,
hv 2 i =
124
10 Kinetische Gastheorie
also
hv 2 i = hvx2 i + hvy2 i + hvz2 i .
Zusammen mit Gl. (10.1) folgt
hvx2 i =
1 2
hv i
3
(10.2)
und der Druck zu ergibt sich
1
p = nm0 hv 2 i .
3
(10.3)
Damit haben wir eine makroskopische Größe (den Druck p) ausgedrückt durch
den Mittelwert über eine mikroskopische Größe (das mittlere Geschwindigkeitsquadrat hv 2 i der Teilchen). Bei der Herleitung von Gl. (10.3) haben wir
die Stöße der Teilchen miteinander vernachlässigt. Das Resultat bleibt aber
auch gültig, wenn man die Stöße mit berücksichtigt, da wir eine konstante Geschwindigkeitsverteilung vorausgesetzt haben. Das bedeutet nämlich, wenn ein
Teilchen mit einem anderen zusammenstößt und sich dabei seine Geschwindigkeit ändert, daß zur Aufrechterhaltung der konstanten Geschwindigkeitsverteilung in demselben Moment irgendwo anders ein Stoß passiert, bei dem
eines der Teilchen diese Geschwindigkeit übernimmt. Aus diesem Grund gibt
es immer ein Teilchen, das mit demselben Impuls auf die Wand A1 trifft, mit
dem ein anderes die Wand A2 verlassen hat, und die dafür benötigte Zeit ist
im Mittel gleich der der freien Bewegung. Da wir außerdem angenommen haben, daß die Dauer der Stöße vernachlässigbar ist gegenüber der Zeitspanne
zwischen zwei Stößen, ergibt sich, daß obige Herleitung nach wie vor gültig
bleibt.
Berücksichtigt man n = N/V , so läßt sich Gl. (10.3) nach Multiplikation
mit V schreiben als
1
pV = N m0 hv 2 i .
3
Vergleicht man diese Gleichung mit der Zustandsgleichung des idealen Gases
pV = N kT , so erhält man
m0 2
3
hv i = kT .
2
2
(10.4)
Der Ausdruck auf der linken Seite der Gleichung ist gerade die mittlere kinetische Energie der Translationsbewegung, kurz mittlere Translationsenergie der
Teilchen
m0 2
hv i .
hEtrans i =
2
125
Gl. (10.4) lautet somit
hEtrans i =
3
m0 2
hv i = kT .
2
2
Diese Beziehung lautet in Worten:
Die mittlere Translationsenergie der Teilchen des idealen Gases ist
der thermodynamischen Temperatur T proportional.
Wir erhalten damit aber eine wichtige Interpretation der thermodynamischen
Temperatur:
Die thermodynamische Temperatur T des idealen Gases ist bis auf
einen Proportionalitätsfaktor gleich der mittleren Translationsenergie der Teilchen.
Damit läßt sich einsehen, daß es eine kleinste Temperatur, T = 0 K gibt. Sie
liegt vor, wenn alle Teilchen in Ruhe sind.
Für die Wurzel aus dem mittleren Geschwindigkeitsquadrat ergibt sich dann
mit Gl. (10.4)
s
q
3kT
hv 2 i =
m0
oder mit m0 = Mmol /NA und R = NA k
q
hv 2 i =
s
3RT
.
Mmol
Die Gl. (10.4) zusammen mit den Gln. (10.2) und (10.1) liefert
m0 2
m0 2
m0 2
1
hvx i =
hvy i =
hvz i = kT .
2
2
2
2
Den Bewegungsmöglichkeiten in drei zueinander senkrechten Richtungen im
Raum entsprechen drei Freiheitsgrade. Die Aussage obiger Gleichung ist dann,
daß die mittlere Energie eines Teilchens pro Freiheitsgrad 12 kT beträgt. Allgemein wird jedem Summanden der Gesamtenergie eines Teilchens, der quadratisch in einer Orts- oder Geschwindigkeitskoordinate ist, ein Freiheitsgrad
zugeordnet. Der Translationsbewegung entsprechen damit drei Freiheitsgrade.
In der statistischen Mechanik läßt sich zeigen, daß allgemein der Gleichverteilungssatz (Äquipartitionsgesetz) gültig ist:
Die mittlere Energie eines Teilchens pro Freiheitsgrad bei der Temperatur T beträgt 12 kT .
126
10 Kinetische Gastheorie
Besitzt in einem System jedes Teilchen f Freiheitsgrade, so ist die mittlere
Energie jedes Teilchens im thermischen Gleichgewicht
hEi =
f
kT .
2
Der Gleichverteilungssatz ist häufig erst bei genügend hohen Temperaturen für
alle Freiheitsgrade erfüllt.
Einatomige Gase: Bei einatomigen Gasen (z.B. Edelgase wie He, Ar, Ne)
besitzen die Teilchen keine andere Energie als diejenige der Translationsbewegung, d.h. die Teilchen haben drei Freiheitsgrade, und es gilt
3
hEi = kT .
2
Zweiatomige Gase: Schon bei normalen Temperaturen führen die Moleküle
zweiatomiger Gase (z.B. H2 , N2 , O2 ) gleichzeitig Translations- und Rotationsbewegungen aus, während Schwingungen der Atome im Molekül erst bei höheren Temperaturen auftreten. Der Aufbau solcher Moleküle ist in Abb. 10.2 dargestellt. Rotationen um die Verbindungslinie beider Atome, welche die Achse
c
6
b
-
a
Abbildung 10.2: Rotationsfreiheitsgrade eines zweiatomigen Moleküls
kleinsten Trägheitsmoments ist, sind bei normalen Temperaturen nicht angeregt. Die Gesamtenergie eines zweiatomigen Moleküls ist somit gegeben durch
E=
Ja
Jb
m0 2
(vx + vy2 + vz2 ) + ωa2 + ωb2 .
2
2
2
127
Ja und Jb sind die Trägheitsmomente um zwei Achsen, die senkrecht zur Verbindungslinie beider Atome durch den Schwerpunkt des Moleküls gehen und
ihrerseits senkrecht aufeinander stehen, siehe Abb. 10.2. Bei der Berechnung
der Trägheitsmomente Ja und Jb kann man sich die Massen der Atome in guter
Näherung in den Kernen vereinigt denken, da die Masse der Elektronenhülle
relativ zur Masse der Kerne sehr klein ist. Das Molekül kann bezüglich der
Rotation in guter Näherung als Hantel angesehen werden, bestehend aus zwei
Punktmassen und einer masselosen Verbindung. Entsprechend der Zahl der
Freiheitsgrade (f = 5) ergibt sich für die mittlere Energie pro Molekül
5
hEi = kT .
2
Mehratomige Gase : Bei mehratomigen Gasmolekülen ist zu unterscheiden,
ob die Atome auf einer Geraden liegen oder nicht, siehe Abb. 10.3. Liegen
j
u
C O2
j
u
j
u
u
H2 O
u
u
j
u
C H4
Abbildung 10.3: Rotationsfreiheitsgrade mehratomiger Moleküle
die Atome auf einer Geraden, so treten wie bei den zweiatomigen Molekülen
zwei Rotationsfreiheitsgrade auf. Im anderen Fall treten drei Rotationsfreiheitsgrade auf, da die Trägheitsmomente dann in allen drei Raumrichtungen
von gleicher Größenordnung sind. Außerdem können die Atome mehratomiger Moleküle schon bei normalen Temperaturen Schwingungen verschiedener
Formen ausführen. D.h. es liegt auch eine gewisse Anzahl von Schwingungsfreiheitsgraden vor. Für die Zahl der Freiheitsgrade f insgesamt gilt somit, wenn
ftrans die Zahl der Translationsfreiheitsgrade, frot die Zahl der Rotationsfreiheitsgrade und fschwing die Zahl der Schwingungsfreiheitsgrade ist
f = ftrans + frot + fschwing .
128
10 Kinetische Gastheorie
Festkörper : Die Atome eines Festkörpers (Gitteratome) können im allgemeinen nur Schwingungen um ihre Gleichgewichtslagen ausführen. Die Schwingungen erfolgen in alle drei Raumrichtungen, siehe Abb. 10.4. Sie können im
Abbildung 10.4: Modell eines Festkörpers
Fall kleiner Amplituden als harmonisch angesehen werden, so daß die Gesamtenergie eines Gitteratoms gegeben ist durch
E=
m0 2
Dx 2 Dy 2 Dz 2
(vx + vy2 + vz2 ) +
x +
y +
z .
2
2
2
2
Ein Gitteratom hat also sechs Freiheitsgrade (f = 6). Damit ergibt sich für
die mittlere Energie pro Gitteratom
hEi = 3kT .
Die gesamte kinetische und potentielle Energie, die in der Wärmebewegung
der Teilchen eines Systems steckt, wird als seine innere Energie U bezeichnet.
Wir betrachten ein ideales Gas, das N = νNA Teilchen, also die Stoffmenge ν,
enthält, und bei dem jedes Teilchen f Freiheitsgrade hat. Bei der Temperatur
T hat nach der oben dargestellten kinetischen Gastheorie jedes Teilchen die
mittlere Energie hEi = f2 kT . Die innere Energie des idealen Gases ist somit
f
f
U = N kT = ν RT .
2
2
Bei einem Festkörper hat jedes Gitteratom 6 Freiheitsgrade. Ein Festkörper,
bestehend aus N = νNA Teilchen bzw. der Stoffmenge ν besitzt somit eine
innere Energie von
U = N 3kT = ν3RT .
Kapitel 11
Wärme, Wärmekapazität und
Wärmeleitung
11.1
Wärme
Bringt man zwei Körper unterschiedlicher Temperatur in Berührung, so stellt
sich nach einiger Zeit eine gemeinsame Endtemperatur ein, die zwischen den
Ausgangstemperaturen liegt. Nach der kinetischen Theorie der Wärme aus dem
vorigen Kapitel nimmt bei diesem Temperaturausgleich die mittlere Energie
pro Teilchen bei dem ursprünglich wärmeren Körper ab, während diejenige des
ursprünglich kälteren Körpers zunimmt. Diese Energie, die von einem wärmeren auf einen kälteren Körper übergeht, wird als Wärme bezeichnet. Wir halten
fest:
Mit Wärme bezeichnet man diejenige Energie, die allein aufgrund
einer Temperaturdifferenz durch ungeordnete Teilchenbewegung von
einem Körper auf einen andern Körper übergehen kann.
Das Formelzeichen für die Wärme ist Q, ihre Einheit im internationalen Einheitensystem Joule (J). Früher wurde als Wärmeeinheit die Kalorie (1 cal) verwendet. Eine Kalorie war dabei festgelegt als die Wärme, die zur Erwärmung von
1 g Wasser von 14, 5 ◦ C auf 15, 5 ◦ C bei einem Druck von 101 325 Pa erforderlich ist. Der Zusammenhang zwischen 1 cal und 1 Joule läßt sich experimentell
bestimmen und wird je nach Erzeugung der Wärmemenge aus mechanischer
oder elektrischer Energie das mechanische oder elektrische Wärmeäquivalent
genannt. Heute ist einfach per definitionem festgesetzt
1 cal = 4, 1868 J .
129
130
11.2
11 Wärme, Wärmekapazität und Wärmeleitung
Spezifische und molare Wärmekapazität
Wenn man die Temperatur eines Körpers um dT erhöhen will, so muß man
ihm eine Wärmemenge dQ zuführen, die proportional ist zu der gewünschten Temperaturerhöhung dT . Der Proportionalitätsfaktor, also der Quotient
aus zugeführter Wärmemenge dQ und Temperaturdifferenz dT , wird als die
Wärmekapazität des betrachteten Körpers bezeichnet. Ihre Einheit ist J K−1 .
Die Wärmekapazität hängt zum einen von dem Stoff ab, aus dem der Körper
besteht, zum anderen von der Masse des Körpers. Man muß bei gleicher Masse
verschiedenen Stoffen unterschiedliche Wärmemengen zuführen, um die Temperatur um den gleichen Betrag zu erhöhen. Um verschiedene Stoffe miteinander vergleichen zu können, bezieht man die Wärmekapazität auf die Masse
und kommt so zu der Definition der spezifischen Wärmekapazität
1 dQ
.
(11.1)
m dT
Ihre Einheit ist [c] = J kg−1 K−1 . Häufig wird die Wärmekapazität auch auf
die Stoffmenge, also auf ein Mol des betrachteten Stoffs bezogen. Dies liefert
die Definition der molaren Wärmekapazität
c=
1 dQ
.
ν dT
K−1 . Wegen m = νMmol folgt die Beziehung
C=
Ihre Einheit ist [C] = J mol−1
C = Mmol c .
Die spezifische bzw. molare Wärmekapazität hängt im allgemeinen von der
Temperatur T ab, bei der die Wärmezufuhr erfolgt. Außerdem hängt sie noch
von den Bedingungen ab, unter denen die Wärmezufuhr erfolgt. Dies ist insbesondere bei Gasen von großer Bedeutung. Im Experiment wird die Wärmezufuhr in der Regel bei konstantem Druck durchgeführt. Bei theoretischen
Überlegungen wird die Wärmezufuhr bei konstantem Volumen betrachtet. Man
kennzeichnet dies dadurch, daß die entsprechenden Wärmekapazitäten mit dem
Index p bzw. V versehen werden. Die spezifische Wärmekapazität bei konstantem Druck bzw. Volumen wird also mit cp bzw. cV bezeichnet; analog wird
die molare Wärmekapazität bei konstantem Druck bzw. Volumen mit Cp bzw.
CV bezeichnet. In den folgenden Tab. 11.1 und 11.2 sind die spezifischen und
molaren Wärmekapazitäten einiger Gase bzw. Festkörper zusammengestellt.
Wird die Temperatur eines homogenen Körpers durch Wärmezufuhr von T1
auf T2 erhöht, so nimmt er gemäß Gl. (11.1) die Wärme
Q=m
Z
T2
T1
c dT
131
11.2 Spezifische und molare Wärmekapazität
CV
Cp − CV
J mol−1 K−1
20,8
20,8
J mol−1 K−1
12,5
12,5
J mol−1 K−1
8,3
8,3
1,664
1,664
Luft
Stickstoff (N2 )
Sauerstoff (O2 )
Wasserstoff (H2 )
Chlor (Cl2 )
29,14
29,16
29,42
28,85
34,89
20,79
20,81
21,07
20,53
26,02
8,35
8,35
8,35
8,32
8,87
1,402
1,401
1,396
1,405
1,341
Ammoniak (NH3 )
Kohlendioxid (CO2 )
36,81
37,55
28,73
29,04
8,08
8,51
1,281
1,293
Gas
Argon (Ar)
Helium (He)
κ=
Cp
CV
Cp
Tabelle 11.1: Molare Wärmekapazitäten einiger Gase bei 25 ◦ C und 101 325 Pa
cp
Cp
CV
Cp − CV
J kg−1 K−1
0,893
0,669
0,393
0,236
0,134
0,133
0,128
J mol−1 K−1
24,1
26,8
25,7
25,5
26,1
26,1
26,5
J mol−1 K−1
23,1
25,4
24,4
24,5
25,6
25,1
24,8
J mol−1 K−1
1,0
1,4
1,3
1,0
0,5
1,0
1,7
Element
Aluminium (Al)
Calcium (Ca)
Zink (Zn)
Silber (Ag)
Platin (Pt)
Gold (Au)
Blei (Pb)
Tabelle 11.2: Spezifische und molare Wärmekapazitäten einiger fester Elemente
bei 15 ◦ C · · · 100 ◦ C
132
11 Wärme, Wärmekapazität und Wärmeleitung
auf. Voraussetzung für die Gültigkeit dieser Gleichung ist, daß keine Phasenumwandlungen in dem betrachteten Temperaturbereich auftreten. Ist die spezifische Wärmekapazität in dem betrachteten Temperaturintervall konstant, so
vereinfacht sich obige Gleichung zu
Q = mc(T2 − T1 ) .
Spezifische Wärmekapazitäten werden experimentell mit Hilfe von Kalorimetern bestimmt. Ein solches Kalorimeter ist in Abb. 11.1 dargestellt. Ein in-
5
4
6
3
2
r
1
Abbildung 11.1: Aufbau eines Kalorimeters. Beschreibung im Text
nen versilbertes Vakuummantelgefäß 1 (ähnlich einer Thermosflasche) ist mit
Wasser oder einer anderen Flüssigkeit 2 gefüllt. Es ist mit einem Deckel 3
verschlossen, durch den ein Rührer 4 und das Thermometer 5 eintauchen.
Durch die Bohrung 6 kann ein Körper in die Flüssigkeit gebracht werden.
Der Rührer sorgt für ständige gute Durchmischung der Flüssigkeit. Die Temperatur vor dem Einbringen des Körpers und nach Erreichen des thermischen Gleichgewichts zwischen Körper und Kalorimeter wird am Thermometer abgelesen. In einem Vorversuch wird die Wärmekapazität CK des Kalorimeters einschließlich Zubehör, aber ohne die Kalorimeterflüssigkeit ermittelt. Die Flüssigkeit habe die Masse mF und die spezifische Wärmekapazität
133
11.3 Wärmeleitung
cF . Unmittelbar vor dem Einbringen in das Kalorimeter habe der Meßkörper
die Temperatur T0 , während die Temperatur des Kalorimeters samt Flüssigkeit TK sei. Tm sei die Mischungstemperatur, die sich einstellt, nachdem der
Meßkörper in das Kalorimeter eingebracht wurde. Im thermischen Gleichgewicht muß die vom Meßkörper abgegebene Wärme mc(Tm − T0 ) dem Betrage nach gleich der vom Kalorimeter und von der Flüssigkeit aufgenommenen
Wärme (CK + mF cF )(Tm − TK ) sein. Das bedeutet
mc(T0 − Tm ) = (CK + mF cF )(Tm − TK ) .
Die spezifische Wärmekapazität des Meßkörpers ergibt sich damit zu
c=
CK + mF cF Tm − TK
.
m
T0 − Tm
Wärmekapazitäten von Gasen werden mit Hilfe von Strömungskalorimetern
bestimmt. Durch elektrische Heizung wird dem strömenden Gas eine bekannte
Wärme pro Zeiteinheit zugeführt. Man mißt außerdem die Temperaturen T1
und T2 an der Eintritts- bzw. Austrittsstelle sowie das pro Zeiteinheit transportierte Volumen. Ausgehend von
Q = ̺V c(T2 − T1 )
erhält man durch Differentiation nach der Zeit die Beziehung
Q̇ = ̺V̇ c(T2 − T1 ) ,
mit der sich die spezifische Wärmekapazität c bestimmen läßt.
11.3
Wärmeleitung
Wärme kann sich durch Wärmeleitung, Konvektion und Wärmestrahlung ausbreiten.
Bei der Wärmeleitung wird die Wärme durch die Bewegung atomarer Teilchen auf die Umgebung übertragen und breitet sich so bei Temperaturunterschieden von wärmeren zu kälteren Bereichen aus.
Bei der Konvektion wird die Wärme durch strömende Gase oder Flüssigkeiten mitgeführt. Bei der natürlichen Konvektion wird die Strömung durch
einen hinreichend großen Temperaturunterschied verursacht. Zum Beispiel hat
warmes Wasser eine kleinere Dichte als kälteres (oberhalb 4 ◦ C). Das wärmere
Wasser steigt deshalb nach oben, während das kältere nach unten sinkt. Bei
134
11 Wärme, Wärmekapazität und Wärmeleitung
der erzwungenen Konvektion wird die Flüssigkeit oder das Gas durch Rührer,
Ventilatoren oder Pumpen bewegt und so ein Wärmetransport erreicht.
Bei der Wärmestrahlung wird die Wärme durch elektromagnetische Strahlung, die von jedem Körper ausgeht, auf die Umgebung oder andere Körper
übertragen. Ein Beispiel ist die von der Sonne ausgesandte Wärmestrahlung.
Wir wollen uns im folgenden nur mit der Wärmeleitung befassen. Wir
betrachten dazu einen Stab aus irgendeinem Material, dessen Seitenflächen
vollständig mit einer Wärmeisolierung umgeben sind, siehe Abb. 11.2. Der
-
T1
l
T2
-
Abbildung 11.2: Wärmeleitung in einem seitlich isolierten Stab
Stab habe die Länge l und den Querschnitt A, und seine Enden befinden sich
auf den unterschiedlichen Temperaturen T1 und T2 , T1 > T2 . Diese werden
konstant gehalten, indem sie dauernd mit Wärmevorratsgefäßen der entsprechenden Temperaturen in Berührung sind. Nach Ablauf einer genügend langen Zeit stellt sich ein stationärer Zustand ein. Die durch den Stab strömende
= Q̇, ist proportional zur
Wärmemenge pro Zeit, also der Wärmestrom dQ
dt
Temperaturdifferenz T1 − T2 und zur Querschnittsfläche A und umgekehrt
proportional zur Länge l des Stabes, in Zeichen
Q̇ = λA
T1 − T2
.
l
(11.2)
Die Proportionalitätskonstante λ heißt Wärmeleitfähigkeit und hängt von dem
verwendeten Material ab. Sie hat die Einheit [λ] = W K−1 m−1 . Im stationären
Zustand ergibt sich in dem Stab ein linearer Temperaturverlauf. Um das einzusehen, wenden wir Gl. (11.2) auf einen Ausschnitt des Stabes der Länge dx
an und erhalten
dT
.
(11.3)
Q̇ = −λA
dx
135
11.3 Wärmeleitung
Der Wärmestrom an der Stelle x ist also dem Temperaturgradienten dT /dx
an dieser Stelle proportional. Im stationären Zustand muß der Wärmestrom
durch jede Querschnittsfläche entlang des Stabes konstant sein, da es sonst
lokal zu einer Erwärmung oder Abkühlung kommen würde. Das heißt aber,
die Ableitung dT /dx muß für alle x konstant sein, was gleichbedeutend ist mit
einem linearen Temperaturverlauf. Gl. (11.2) können wir auch in der Form
T1 − T2 = RW Q̇
schreiben, welche als das OHMsche Gesetz der Wärmeleitung bezeichnet wird.
Der Wärmewiderstand RW für einen seitlich isolierten Stab ergibt sich dabei
zu
l
.
(11.4)
RW =
λA
Ist die Querschnittsfläche A entlang des Wärmeleiters nicht konstant, sondern
eine Funktion von x, so gehen wir aus von Gl. (11.3), wobei A jetzt eine
Funktion von x ist
dT
Q̇ = −λA(x)
.
dx
Im stationären Zustand, also bei einem konstanten Wärmestrom Q̇, folgt dann
T2 − T1 =
Z
T2
T1
dT = −Q̇
Z
x2
x1
dx
.
λA(x)
Der Wärmewiderstand ergibt sich also allgemein zu
RW =
Z
x2
x1
dx
.
λA(x)
Ist der Wärmeleiter ein seitlich isolierter Stab oder eine planparallele Platte,
d.h. A(x) = A = const., so ergibt sich der Wärmewiderstand RW = l/λA, siehe
Gl. (11.4). Erfolgt die Wärmeleitung durch die Wandung eines Hohlzylinders
mit dem Innenradius r1 , dem Außenradius r2 und der Länge l, d.h. A(r) =
2πrl, so ergibt sich der Wärmewiderstand
Z
RW =
r2
r1
dr
1
r2
=
ln
λ2πrl
2πλl
r1
.
Diese Beziehung ist zum Beispiel bei der Wärmeisolierung von Rohren oder
zylinderförmigen Behältern von Bedeutung. Erfolgt die Wärmeleitung durch
die Wandung einer Hohlkugel mit dem Innenradius r1 und dem Außenradius
r2 , d.h. A(r) = 4πr2 , so ergibt sich der Wärmewiderstand
RW =
Z
r2
r1
1
1
1
dr
−
=
2
λ4πr
4πλ r1 r2
.
136
11 Wärme, Wärmekapazität und Wärmeleitung
Diese Gleichung findet zum Beispiel Anwendung bei der Wärmeisolierung kugelförmiger Tanks.
Der Austausch von Wärme zwischen einem festen Körper und einem angrenzenden Gas oder einer angrenzenden Flüssigkeit heißt Wärmeübergang.
Die Wärmeübertragung erfolgt hierbei nicht nur durch Wärmeleitung, sondern auch durch Wärmeströmung (Konvektion). Eine solche Situation liegt
beispielsweise vor bei einem Heizkörper zusammen mit der umgebenden Luft.
Die erwärmte Luft steigt an der Außenfläche des Heizkörpers hoch, und von
unten strömt kältere Luft nach. Es bildet sich eine dünne Grenzschicht aus, in
der die Temperatur des Gases auf die des Festkörpers ansteigt, siehe Abb. 11.3.
Der in der Grenzschicht entstehende Temperaturunterschied verursacht außerT6
T1
T2
-
Festkörper
Flüssigkeit, Gas
Abbildung 11.3: Wärmeübergang von einem Festkörper auf eine Flüssigkeit
oder ein Gas
dem noch Wärmestrahlung. Insgesamt gilt für den Wärmeübergang zwischen
einem festen Körper der Temperatur T1 und einem Gas oder einer Flüssigkeit
der Temperatur T2 folgender Zusammenhang
Q̇ = αA(T1 − T2 ) .
Die Proportionalitätskonstante α heißt Wärmeübergangskoeffizient und hängt
von den angrenzenden Materialien und der Oberflächenbeschaffenheit des
festen Körpers ab. Der Wärmeübergangskoeffizient hat die Einheit [α] =
W K−1 m−2 . Obige Gleichung läßt sich auch schreiben in der Form
T1 − T2 = RW Q̇
mit dem Wärmeübergangswiderstand
RW =
1
.
αA
137
11.3 Wärmeleitung
Mit obigen Resultaten läßt sich nun auch der Wärmetransport durch eine feste Wand, bestehend aus mehreren Schichten, beschreiben. Unter Wärmedurchgang versteht man den Wärmetransport von einem Gas oder einer Flüssigkeit
durch eine feste Wand zu einem anderen Gas oder einer anderen Flüssigkeit.
Die Wand bestehe aus n Schichten, siehe Abb. 11.4. Mit li bzw. λi , i = 1, . . . , n,
αa
Ta
αb
λ1
-
l1
λ2
-
l2
Tb
λn
···
-
ln
Wand
-
Abbildung 11.4: Wärmedurchgang durch eine Wand, bestehend aus mehreren
Schichten
werde die Dicke bzw. die Wärmeleitfähigkeit der einzelnen Schichten bezeichnet. Alle Schichten haben die gleiche Querschnittsfläche A. Die Temperatur
des Gases oder der Flüssigkeit auf der linken Seite der Wand sei Ta und die
auf der rechten Seite Tb . Für die Wärmeübergänge links und rechts und die
Wärmeleitung in den einzelnen Schichten gilt im stationären Zustand
1
Ta − T1 = RW a Q̇
,
RW a =
,
αa A
l1
,
T1 − T2 = RW 1 Q̇
,
RW 1 =
λ1 A
l2
,
T2 − T3 = RW 2 Q̇
,
RW 2 =
λ2 A
···
ln
Tn − Tn+1 = RW n Q̇
,
RW n =
,
λn A
1
.
Tn+1 − Tb = RW b Q̇
,
RW b =
αb A
Hierbei sind Ti bzw. Ti+1 die Temperaturen an der linken bzw. rechten Seite
der i-ten Schicht. Innerhalb der einzelnen Schichten ist, wie wir gesehen haben,
138
11 Wärme, Wärmekapazität und Wärmeleitung
im thermischen Gleichgewicht der Temperaturverlauf linear. Außerdem ist im
thermischen Gleichgewicht der Wärmestrom Q̇ überall konstant, hat also in
allen obigen Gleichungen denselben Wert. Summation der obigen Gleichungen
ergibt
Ta − Tb = RW Q̇
(11.5)
mit
RW = RW a + RW 1 + RW 2 + · · · + R W n + RW b
l1
l2
ln
1
1
+
+
+ ··· +
+
.
=
αa A λ1 A λ2 A
λn A αb A
Der gesamte Wärmewiderstand ist bei einer Reihenschaltung von Wärmeleitern und Wärmeübergängen also gegeben durch die Summe der einzelnen
Wärmewiderstände. Führt man noch den Wärmedurchgangskoeffizienten k ein
1
gemäß RW = kA
, so erhält man im Fall des Wärmedurchgangs durch eine
Wand, bestehend aus n Schichten,
l1
l2
ln
1
1
1
+
+
+ ··· +
+
.
=
k
αa λ1 λ2
λn αb
Der Wärmedurchgangskoeffizient k hat die Einheit [k] = W K−1 m−2 . Die
Gl. (11.5) läßt sich dann schreiben in der Form
Q̇ = kA(Ta − Tb ) .
Kapitel 12
Der erste Hauptsatz der
Thermodynamik
12.1
Der erste Hauptsatz der Thermodynamik
Der Arzt ROBERT MAYER (1814 -1878) erkannte 1842 als erster, daß Wärme
eine Energieform ist, und daß ein allgemeiner Energieerhaltungssatz für ein abgeschlossenes System gilt, wenn seine innere Energie mitberücksichtigt wird.
Als innere Energie U eines Systems hatten wir schon in Kap. 10 die gesamte kinetische und potentielle Energie bezeichnet, die in der Wärmebewegung
seiner Teilchen steckt.
Die Aussage des ersten Hauptsatzes der Thermodynamik , der unabhängig
voneinander von ROBERT MAYER (1842), JAMES PRESCOTT JOULE
(1843) und HERMANN von HELMHOLTZ (1847) erkannt wurde, lautet:
Für jedes stoffliche System gibt es eine nur von seinen Zustandsvariablen abhängige Zustandsfunktion, seine innere Energie U . Bei
irgendeiner Zustandsänderung des Systems ist die Änderung der
inneren Energie ∆U gleich der Summe aus der dem System zugeführten Wärme ∆Q abzüglich der vom System verrichteten Arbeit ∆W , in Zeichen:
∆U = ∆Q − ∆W .
(12.1)
Vereinbarungsgemäß wird hierbei die Wärme ∆Q positiv gezählt, wenn sie
dem System zugeführt wird, und negativ, wenn sie dem System entnommen
139
140
12 Der erste Hauptsatz der Thermodynamik
wird. Die Arbeit ∆W wird demgegenüber positiv gezählt, wenn sie vom System verrichtet wird, und negativ, wenn sie dem System zugeführt wird. Der
erste Hauptsatz der Thermodynamik ist ein Erfahrungssatz, der kurz formuliert aussagt, daß unter Einbeziehung aller Energieformen in einem abgeschlossenen System keine Energie gewonnen oder vernichtet werden kann. Für die
Technik bedeutet das, daß es keine Maschine gibt, die Arbeit verrichten kann,
ohne daß ihr die entsprechende Energie zugeführt wird. Eine solche Maschine wird als Perpetuum mobile erster Art bezeichnet. Der erste Hauptsatz der
Thermodynamik läßt sich also auch so formulieren:
Es gibt kein Perpetuum mobile erster Art.
Die einem System zugeführte oder entnommene Arbeit wollen wir uns bei
folgender Anordnung genauer anschauen. Ein Gas befinde sich in einem Zylinder, der auf der oberen Seite durch einen beweglichen Kolben abgeschlossen ist,
siehe Abb. 12.1. Bei einer Expansion kann das Gas Arbeit nach außen abgeben,
?
dx
6
p
Abbildung 12.1: Volumenarbeit eines Gases, welches sich in einem zylindrischen
Gefäß mit beweglichem Kolben befindet
was z.B. bei einer Dampfmaschine ausgenutzt wird, während die Kompression des Gases Arbeit erfordert. Von außen werde die Kraft F auf den Kolben
ausgeübt. Im Gleichgewicht sind der Gasdruck p und der von außen ausgeübte
Druck p = F/A gerade gleich, wobei A die Fläche des Kolbens bezeichnet. Die
Arbeit, die das Gas bei einer infinitesimalen Verschiebung des Kolbens um dx
verrichtet, ist
dW = F dx = pA dx = p dV .
Das Ergebnis entspricht unserer Konvention, daß die von dem Gas verrichtete
Arbeit (dV > 0) positiv und die dem Gas zugeführte Arbeit (dV < 0) negativ gezählt wird. Wird das Volumen in einem endlichen Bereich von V1 auf
141
12.1 Der erste Hauptsatz der Thermodynamik
V2 geändert, so wird der Druck p während der Verschiebung des Kolbens im
allgemeinen nicht konstant sein, und die verrichtete Arbeit ergibt sich zu
∆W =
Z
V2
V1
p dV .
(12.2)
Streng genommen sind der Innendruck des Gases und der von außen auf den
Kolben ausgeübte Druck nur bei unendlich langsamer Expansion bzw. Kompression ständig im Gleichgewicht. Man spricht in diesem Fall von einer reversiblen Expansion bzw. Kompression. Bei allen Anwendungen der obigen beiden
Gleichungen wird im folgenden immer vorausgesetzt, daß die Volumenänderungen in diesem Sinne reversibel erfolgen.
Stellen wir die Zustandsänderung als Kurve im p, V -Diagramm dar, so ergibt
sich aus Gl. (12.2), daß die vom System verrichtete Arbeit gerade die Fläche
unter dieser Kurve ist, siehe Abb. 12.2. Aus Abb. 12.2 läßt sich darüber hinaus
p
6
2r
1r
-
V1
V2
V
Abbildung 12.2: Darstellung der verrichteten Arbeit als Fläche im p, V Diagramm. Die verrichtete Arbeit hängt nicht nur vom Anfangs- und Endzustand ab, sondern auch von dem gewählten Weg.
die wichtige Tatsache erkennen, daß die vom System verrichtete (oder die dem
System zugeführte) Arbeit nicht nur vom Anfangs- und Endzustand abhängt,
sondern auch von dem Weg, der zwischen den beiden Zuständen gewählt wird.
Führt man in Abb. 12.2 die Zustandsänderung von Zustand 1 nach Zustand 2
beispielsweise entlang eines anderen Weges durch als dem, der eingezeichnet
ist, so wird die Fläche unter der Kurve im allgemeinen eine andere sein, die
vom System verrichtete Arbeit also einen anderen Wert haben.
142
12 Der erste Hauptsatz der Thermodynamik
Für die vom System aufgenommene (oder abgegebene) Wärme gilt dasselbe.
Sie ist ebenfalls nicht nur vom Anfangs- und Endzustand abhängig, sondern
auch von dem gewählten Weg. Die Aussage des ersten Hauptsatzes der Thermodynamik besteht nun gerade darin, daß die Summe aus der dem System
zugeführten Wärme ∆Q abzüglich der vom System verrichteten Arbeit ∆W
unabhängig ist vom gewählten Weg. Sie ist gerade gleich der Änderung der
inneren Energie des Systems ∆U , womit die innere Energie U eine nur von
den Zustandsvariablen, z.B. p, V , abhängige Zustandsfunktion ist.
12.2
Die innere Energie eines idealen Gases
Wir gehen zunächst noch einmal auf die innere Energie eines idealen Gases ein.
Betrachten wir die Temperatur T und das Volumen V als die jeden Zustand
kennzeichnenden Größen, so ist die innere Energie zunächst allgemein eine
Funktion von T und V , also U = U (V, T ). Mit dem in Abb. 12.3 dargestellten
Versuch von GAY-LUSSAC läßt sich experimentell nachweisen, daß die innere
Energie U vom Volumen V , das das Gas einnimmt, unabhängig ist. Bei dem
p
p
p
p
p
p
p
V1
p
p
p
p
p
p
p
p
p
p
p
p
p
V2
-
Abbildung 12.3: Der Versuch von GAY-LUSSAC (Expansion eines Gases ohne
Arbeitsleistung)
Versuch wird ein Gas betrachtet, welches sich in einem wärmeisolierten Gefäß
befindet. Zunächst ist das Gas in dem kleineren Volumen V1 und hat die Temperatur T1 . Nach dem Öffnen des Absperrhahns expandiert das Gas in den
zunächst evakuierten Teil des Gefäßes und nimmt dann das Gesamtvolumen
V2 ein. Nachdem es zur Ruhe gekommen ist, wird aufs neue seine Temperatur
T2 gemessen. Die Messung ergibt, daß sich die Temperatur nicht geändert hat,
12.3 Die molare Wärmekapazität des idealen Gases
143
also T2 = T1 . Infolge der Wärmeisolierung kann keine Wärme mit der Umgebung ausgetauscht werden, d.h. ∆Q = 0. Außerdem verrichtet das Gas bei
diesem Versuch keine Arbeit, d.h. ∆W = 0. Aus dem ersten Hauptsatz folgt
damit für die Änderung der inneren Energie ∆U = 0, bzw.
U (V1 , T1 ) = U (V2 , T2 ) .
Da das Experiment aber T2 = T1 ergibt, folgt, daß die innere Energie eines
idealen Gases nicht vom Volumen abhängt.
Dieses Resultat ist in Einklang mit der kinetischen Gastheorie. Dort hatte
sich für die innere Energie von ν Molen eines idealen Gases mit f Freiheitsgraden pro Teilchen ergeben
f
U = ν RT ,
2
(12.3)
also eine ausschließlich von der Temperatur T abhängige Funktion.
12.3
Die molare Wärmekapazität des idealen
Gases
In Experimenten wird in der Regel die molare Wärmekapazität bei konstantem
Druck, also Cp , gemessen. Bei theoretischen Überlegungen ist es einfacher, die
molare Wärmekapazität bei konstantem Volumen zu betrachten. Aus diesem
Grund ist es wichtig, die Beziehung zwischen den molaren Wärmekapazitäten
Cp und CV zu ermitteln. Wir wollen diese im folgenden für ein ideales Gas
herleiten und betrachten dazu die in Abb. 12.4 dargestellten Zustandsänderungen.
Bei der Zustandsänderung (a) werde das ideale Gas bei konstantem Volumen
von der Temperatur T auf die Temperatur T + dT erwärmt. Wir gehen aus
von dem ersten Hauptsatz der Thermodynamik in differentieller Form
dU = dQ − dW
und wenden ihn auf diesen Prozeß an. Für die vom Gas aufgenommene Wärme
ergibt sich gemäß der Definition von CV
dQ = νCV dT .
Da das Volumen konstant ist (dV = 0), gilt für die vom Gas verrichtete Arbeit
dW = p dV = 0 .
144
12 Der erste Hauptsatz der Thermodynamik
p
6
a
r
6
r
-
b
r
T + dT
T
-
V
Abbildung 12.4: Erwärmung eines idealen Gases bei konstantem Volumen (a),
bei konstantem Druck (b)
Aus dem ersten Hauptsatz folgt damit
dU = dQ = νCV dT .
(12.4)
An dieser Stelle ist es wichtig, zu betonen, daß die in Gl. (12.4) gewonnene Beziehung für die Änderung der Energie nicht nur für die Zustandsänderung (a)
gilt. Die innere Energie U hängt beim idealen Gas ja nur von der Temperatur
ab, ist also konstant auf den in Abb. 12.4 dargestellten Isothermen. Bei jeder
Zustandsänderung, die von einem Zustand auf der Isothermen zur Temperatur T zu einem Zustand auf der Isothermen zur Temperatur T + dT führt, ist
die Änderung der inneren Energie dU somit gleich, und zwar gleich dem in
Gl. (12.4) berechneten Wert. Wir werden das bei der nun folgenden Betrachtung benutzen.
Als nächstes untersuchen wir die Zustandsänderung (b), die von demselben
Anfangszustand ausgeht wie die Zustandsänderung (a). Das ideale Gas werde
diesmal bei konstantem Druck p von der Temperatur T auf die Temperatur
T + dT erwärmt. Für die vom Gas aufgenommene Wärme gilt gemäß der
Definition von Cp
dQ = νCp dT .
Das Gas expandiert bei diesem Prozeß um das Volumen dV . Die vom Gas
verrichtete Arbeit ergibt sich somit zu
dW = p dV .
12.3 Die molare Wärmekapazität des idealen Gases
145
Für die Änderung der inneren Energie dU liefert der erste Hauptsatz in diesem
Fall
dU = νCp dT − p dV .
(12.5)
Da bei diesem Prozeß der Druck p konstant bleibt, folgt aus der Zustandsgleichung des idealen Gases
pV = νRT
die Beziehung
p dV = νR dT .
Setzt man dies in Gl. (12.5) ein, so ergibt sich
dU = νCp dT − νR dT .
(12.6)
Da sich die Temperatur bei dem Prozeß (b) ebenso wie bei dem Prozeß (a)
von T nach T + dT ändert, gilt gemäß Gl. (12.4) für die Änderung der inneren
Energie andererseits dU = νCV dT . Aus den Gln. (12.4) und (12.6) folgt somit
νCV dT = νCp dT − νR dT
bzw.
Cp = CV + R .
(12.7)
Diese Beziehung zeigt, daß die molare Wärmekapazität eines idealen Gases
bei konstantem Druck immer um einen festen Wert größer ist als die molare
Wärmekapazität bei konstantem Volumen, und zwar um den Wert der universellen Gaskonstanten R = 8, 3145 J mol−1 K−1 . Obwohl Gl. (12.7) nur für ein
ideales Gas exakt gültig ist, zeigt sich dennoch, daß sie auch für reale Gase bei
nicht zu hohen Drücken gut erfüllt ist, siehe Tab. 11.1.
Für das ideale Gas läßt sich nun die molare Wärmekapazität bei konstantem
Volumen direkt berechnen. Wir gehen aus von Gl. (12.4) und schreiben sie in
der Form
1 dU
.
CV =
ν dT
Die innere Energie von ν Molen eines idealen Gases mit f Freiheitsgraden pro
Teilchen beträgt
f
U = ν RT .
2
Setzt man dies in die Gleichung für CV ein, so folgt
CV =
f
R.
2
(12.8)
146
12 Der erste Hauptsatz der Thermodynamik
Mit Gl. (12.7) folgt für Cp
f +2
R.
(12.9)
2
Der Quotient aus Cp und CV ist der sogenannte Adiabatenexponent κ = CCVp .
Für ihn ergibt sich aus obigen Gleichungen
Cp =
κ=
Cp
f +2
=
.
CV
f
(12.10)
Die Bedeutung des Adiabatenexponenten wird in den folgenden Abschnitten
noch näher erläutert werden. In Tab. 12.1 sind die Werte für CV und κ für
ideale Gase in Abhängigkeit von der Zahl der Freiheitsgrade f eingetragen.
Ein Vergleich mit Tab. 11.1 zeigt gute Übereinstimmung mit den experimentell
bestimmten Werten für verschiedene reale Gase.
Gas
f
einatomig
3
zweiatomig 5
mehratomig 6
CV
[J mol−1 K−1 ]
3
R
2
5
R
2
= 12, 47
= 20, 79
3R = 24, 94
κ
5
3
7
5
4
3
= 1, 666
= 1, 400
= 1, 333
Tabelle 12.1: Die molare Wärmekapazität CV und der Adiabatenexponent κ
für ideale Gase
12.4
Die molare Wärmekapazität von Festkörpern
Bei einem Festkörper hat, wie wir weiter oben gesehen haben, jedes Gitteratom
6 Freiheitsgrade. Für die innere Energie von ν Molen gilt damit
U = ν3RT .
Für die molare Wärmekapazität bei konstantem Volumen folgt dann
1 dU
= 3R = 24, 94 J mol−1 K−1 .
ν dT
Dieser Sachverhalt wird als DULONG - PETIT’sche Regel bezeichnet. Ein Vergleich mit Tab. 11.2 zeigt, daß die molaren Wärmekapazitäten vieler Festkörper
bei normalen Temperaturen mit diesem Wert übereinstimmen. Abweichungen
von diesem Wert bei tiefen Temperaturen lassen sich durch die Quantenmechanik erklären.
CV =
147
12.5 Zustandsänderungen idealer Gase
12.5
Zustandsänderungen idealer Gase
In diesem Abschnitt wollen wir verschiedene Zustandsänderungen eines idealen Gases betrachten und dabei insbesondere den Gesichtspunkt der Energieumwandlung untersuchen. Das betrachtete System ist im folgenden stets
ein Gas, welches sich in einem Gefäß mit beweglichem Kolben befindet. Der
erste Hauptsatz der Wärmelehre läßt sich somit in folgender Form schreiben
dU = dQ − p dV .
12.5.1
Isochore Zustandsänderung, dV = 0
Man betrachte die in Abb. 12.5 dargestellte Zustandsänderung eines idealen Gases, bei der das Volumen V konstant gehalten wird. Eine solche Zustandsänderung wird isochor genannt. Wegen dV = 0 folgt dW = p dV = 0
p
6
p2
r
p1
6
r
T2
T1
-
V
V
Abbildung 12.5: Isochore Zustandsänderung eines idealen Gases
und somit für die vom Gas verrichtete Arbeit
∆W = 0 .
Aus dem ersten Hauptsatz folgt dQ = dU , d.h. die zugeführte Wärme bewirkt
ausschließlich eine Erhöhung der inneren Energie. Gemäß der Definition von
CV gilt für die zugeführte Wärme dQ = νCV dT . Die gesamte Änderung der
148
12 Der erste Hauptsatz der Thermodynamik
inneren Energie bzw. die insgesamt zugeführte Wärme ergibt sich damit zu
∆U = ∆Q =
12.5.2
Z
T2
T1
νCV dT = νCV (T2 − T1 ) .
Isobare Zustandsänderung, dp = 0
Man betrachte die in Abb. 12.6 dargestellte Zustandsänderung eines idealen
Gases, bei der der Druck p konstant gehalten wird. Eine solche Zustandsänderung wird isobar genannt. Der erste Hauptsatz dQ = dU +p dV liefert hier, daß
p
6
r -
p
r
T2
T1
-
V1
V2
V
Abbildung 12.6: Isobare Zustandsänderung eines idealen Gases
die zugeführte Wärme dQ eine Erhöhung der inneren Energie um dU bewirkt
und außerdem für die Volumenarbeit dW = p dV aufkommen muß. Gemäß
der Definition von Cp gilt für die zugeführte Wärme dQ = νCp dT , womit folgt
∆Q =
Z
T2
T1
νCp dT = νCp (T2 − T1 ) .
Die allgemein gültige Beziehung für die Änderung der innere Energie dU eines
idealen Gases, wenn die Temperatur von T auf T + dT erhöht wird, lautet
nach Gl. (12.4) dU = νCV dT . Damit ergibt sich für die gesamte Änderung
der inneren Energie
∆U =
Z
U2
U1
dU =
Z
T2
T1
νCV dT = νCV (T2 − T1 ) .
149
12.5 Zustandsänderungen idealer Gase
Für die bei der Ausdehnung verrichtete Volumenarbeit erhält man
∆W =
Z
V2
V1
p dV = p(V2 − V1 ) = νR(T2 − T1 ) .
Bei der letzten Gleichheit ist die Zustandsgleichung des idealen Gases benutzt
worden, pV = νRT .
12.5.3
Isotherme Zustandsänderung, dT = 0
Man betrachte die in Abb. 12.7 dargestellte Zustandsänderung eines idealen
Gases, bei der die Temperatur T konstant gehalten wird. Eine solche Zustandsänderung wird isotherm genannt. Wegen dT = 0 und damit dU =
p
p1
6
r
R
r
p2
T
-
V1
V2
V
Abbildung 12.7: Isotherme Zustandsänderung eines idealen Gases
νCV dT = 0 folgt für die Änderung der inneren Energie
∆U = 0 .
Da die innere Energie bei einer isothermen Expansion konstant bleibt, folgt
aus dem ersten Hauptsatz die Gleichung dQ = p dV , d.h. die dem System
zugeführte Wärme entspricht der vom System verrichteten Volumenarbeit. Das
ergibt
Z
∆Q = ∆W =
V2
V1
p dV .
150
12 Der erste Hauptsatz der Thermodynamik
Mit pV = νRT folgt weiter
∆Q = ∆W =
12.5.4
Z
V2
V1
νRT
V2
dV
= νRT (ln V2 − ln V1 ) = νRT ln
.
V
V1
(12.11)
Adiabatische Zustandsänderung, dQ = 0
Man betrachte die in Abb. 12.8 dargestellte Zustandsänderung eines idealen
Gases, bei der ein Wärmeaustausch mit der Umgebung verhindert wird, also
dQ = 0. Eine solche Zustandsänderung wird adiabatisch genannt. In diesem
p
6
r
p1
R
r
p2
V1
V2
T1
T2
-
V
Abbildung 12.8: Adiabatische Zustandsänderung eines idealen Gases
Fall liefert der erste Hauptsatz die Gleichung dU = −dW = −p dV , d.h. die
bei einer adiabatischen Expansion verrichtete Arbeit wird der inneren Energie
des Systems entzogen, was eine Erniedrigung der Temperatur zur Folge hat.
Es gilt
∆W = −∆U = −
Z
U2
U1
dU = −
Z
T2
T1
νCV dT = νCV (T1 − T2 ) .
(12.12)
Wir wollen noch herleiten, wie sich adiabatische Zustandsänderungen im
p, V -Diagramm darstellen, also auf welchen Kurven sie verlaufen. Wir gehen
dazu noch einmal aus von der Gleichung
dU = −p dV .
151
12.5 Zustandsänderungen idealer Gase
Mit dU = νCV dT und p = νRT /V ergibt sich
νCV dT = −νRT
dV
V
bzw.
CV
dT
dV
= −R
.
T
V
Integration dieser Gleichung auf beiden Seiten ergibt
CV
Z
T
T0
Z V
dT
dV
= −R
T
V0 V
bzw.
CV ln
V
T
= −R ln
.
T0
V0
Mit R = Cp − CV und dem Adiabatenexponent κ = Cp /CV folgt
T
(Cp − CV ) V
V
V0
ln
=−
ln
= −(κ − 1) ln
= ln
T0
CV
V0
V0
V
κ−1
.
Nach Anwenden der Exponentialfunktion auf beiden Seiten der Gleichung folgt
V0
T
=
T0
V
κ−1
bzw.
T V κ−1 = T0 V0κ−1 = const. .
Mit pV /νR = T ergibt sich schließlich
pV κ = p0 V0κ = const.
die POISSONsche Adiabatengleichung. Diese Gleichung beschreibt die adiabatischen Zustandsänderungen eines idealen Gases in der p, V -Ebene. Abb. 12.9
zeigt den Verlauf der Adiabaten, die durch den Zustand (V0 , p0 ) geht. Da
κ > 1, verläuft die Adiabate im p, V -Diagramm immer steiler als die Isotherme
pV = p0 V0 durch den gleichen Punkt (V0 , p0 ).
152
12 Der erste Hauptsatz der Thermodynamik
p
p0
6
e
T
-
V0
V
Abbildung 12.9: Verlauf einer Isothermen (dünn gezeichnet) und einer Adiabaten (dick gezeichnet) im p, V -Diagramm. Beide gehen durch den Punkt (V0 , p0 ).
12.6
Der CARNOTsche Kreisprozeß
Bei vielen Maschinen besteht der gewünschte Effekt darin, daß Wärme in Arbeit umgewandelt wird. Wir werden aber im nächsten Kapitel sehen, daß sich
bei periodisch arbeitenden Maschinen Wärme nicht vollständig in Arbeit umwandeln läßt. Für die Konstruktion einer periodisch arbeitenden Maschine
ist nun die Frage von entscheidender Bedeutung, welcher Bruchteil der zur
Verfügung stehenden Wärme in Arbeit umgewandelt werden kann. Bei der
Beantwortung dieser Frage spielt der CARNOTsche Kreisprozeß eine wichtige
Rolle.
Unter einem Kreisprozeß versteht man eine Zustandsänderung, die in den
Anfangszustand zurückführt. Jede periodisch arbeitende Maschine vollführt
einen Kreisprozeß. Die Zustandsänderung kann (natürlich nur in einem nicht
völlig realisierbaren Grenzfall) reversibel (umkehrbar) verlaufen. Die Zustandsgrößen müssen dazu sehr langsam geändert werden, so daß sich das System
ständig im thermodynamischen Gleichgewicht befindet.
Unter einem CARNOTschen Kreisprozeß versteht man eine Folge von Zustandsänderungen, welche an einem idealen Gas vollzogen werden, das sich in
einem Zylinder mit verschiebbarem Kolben befindet. Der Zylinder kann nacheinander mit zwei Wärmebehältern zum Temperaturausgleich in Berührung
gebracht werden. Der eine Wärmebehälter werde auf der konstanten Temperatur T1 , der andere auf einer niedrigeren Temperatur T2 gehalten. Zwischendurch wird der Zylinder mit einer wärmeundurchlässigen Isolierung am
12.6 Der CARNOTsche Kreisprozeß
153
Temperaturausgleich mit der Umgebung gehindert, durchläuft also eine adiabatische Zustandsänderung. Im einzelnen werden bei diesem Kreisprozeß mit
dem eingeschlossenen Gas die folgenden vier reversiblen Zustandsänderungen
durchgeführt. Sie sind in Abb. 12.10 in einem p, V -Diagramm dargestellt.
Abbildung 12.10: Darstellung der einzelnen Schritte des CARNOTschen Kreisprozesses im p, V -Diagramm
Schritt I (Isotherme Expansion) : Der Zylinder wird mit dem Wärmebehälter der Temperatur T1 in Berührung gebracht. Das Gas dehnt sich bei
der konstanten Temperatur T1 von dem Volumen V1 auf das Volumen V2 aus.
Dabei nimmt es aus dem Wärmebehälter die Wärme ∆Q1 auf. Da die innere
Energie bei einem isothermen Vorgang konstant bleibt, wird die dem Wärmebehälter entnommene Wärme vollständig in Arbeit umgewandelt.
Schritt II (Adiabatische Expansion) : Der Zylinder wird nun von dem
Wärmebehälter der Temperatur T1 getrennt und mit einer Wärmeisolierung
umgeben. Das Gas dehnt sich jetzt unter Wärmeabschluß (adiabatisch) weiter
auf das Volumen V3 aus. Da die hierbei verrichtete Arbeit ausschließlich aus
der inneren Energie bezogen wird, kühlt sich das Gas von der Temperatur T1
auf die Temperatur T2 ab.
154
12 Der erste Hauptsatz der Thermodynamik
Schritt III (Isotherme Kompression) : Der Zylinder wird jetzt mit dem
Wärmebehälter der Temperatur T2 in Berührung gebracht. Das Gas wird bei
der konstanten Temperatur T2 von dem Volumen V3 auf das Volumen V4 komprimiert. Die dem Gas dabei zugeführte Arbeit wird in Wärme umgewandelt
und an den Wärmebehälter der Temperatur T2 abgegeben. Die abgegebene
Wärme werde mit ∆Q2 bezeichnet.
Schritt IV (Adiabatische Kompression) : Der Zylinder wird von dem
Wärmebehälter der Temperatur T2 getrennt und erneut mit einer Wärmeisolierung umgeben. Das Gas wird unter Wärmeabschluß (adiabatisch) auf das
Ausgangsvolumen V1 komprimiert. Die hierbei zugeführte Arbeit bewirkt eine
entsprechende Zunahme der inneren Energie. Dabei erhöht sich die Temperatur
des Gases von T2 auf T1 .
Der Kreisprozeß kann beliebig oft wiederholt werden. In der nachfolgenden
Tab. 12.2 ist die Energiebilanz für die vier Einzelschritte des CARNOTschen
Kreisprozesses zusammengestellt. Die angegebenen Werte für die zugeführte
(entnommene) Arbeit bzw. die zugeführte (entnommene) Wärmemenge ergeben sich direkt aus den Gln. (12.11) und (12.12).
Prozeß
Temperaturänderung
Volumenänderung
zugeführte/
entnommene
Arbeit
I
Isotherme
Expansion
II
Adiabatische
Expansion
III
Isotherme
Kompression T2 = const V3 → V4
−νRT2 ln
IV
Adiabatische
Kompression T2 → T1
νCV (T2 − T1 )
T1 = const V1 → V2
T1 → T2
V2 → V3
V4 → V1
νRT1 ln
V2
V1
νCV (T1 − T2 )
V3
V4
zugeführte/
entnommene
Wärmemenge
νRT1 ln
V2
V1
0
−νRT2 ln
V3
V4
0
Tabelle 12.2: Energiebilanz der vier Einzelschritte des CARNOTschen Kreisprozesses
Für die insgesamt bei einem Durchlauf des Kreisprozesses gewonnene Arbeit
ergibt sich aus obiger Tabelle
∆W = νRT1 ln
V2
V3
− νRT2 ln
.
V1
V4
155
12.6 Der CARNOTsche Kreisprozeß
Aus der Zustandsgleichung für adiabatische Prozesse T V κ−1 = const folgen
die beiden Beziehungen
T1 V2κ−1 = T2 V3κ−1
und
T1 V1κ−1 = T2 V4κ−1 .
Dividiert man diese beiden Gleichungen durcheinander, so ergibt sich
V2
V1
κ−1
V3
=
V4
κ−1
V2
V3
=
.
V1
V4
bzw.
Die der CARNOTschen Maschine bei einem Umlauf entnommene Arbeit ist
also
V2
.
∆W = νR(T1 − T2 ) ln
V1
Die dem Wärmereservoir mit der Temperatur T1 entnommene Nutzwärme beträgt
V2
∆Q1 = νRT1 ln
.
V1
Die an das Wärmereservoir mit der Temperatur T2 abgeführte Abwärme beträgt
V3
.
∆Q2 = −νRT2 ln
V4
Als Wirkungsgrad η definiert man das Verhältnis der insgesamt bei einem Umlauf gewonnenen Arbeit zur aufgenommenen Nutzwärme, also η = ∆W/∆Q1 .
Für die reversibel arbeitende CARNOT-Maschine ergibt sich
η=
∆W
=
∆Q1
νR(T1 − T2 ) ln
V2
νRT1 ln
V1
also
V2
V1
=
T1 − T2
,
T1
(12.13)
T1 − T2
.
T1
Der Wirkungsgrad ist damit um so größer, je weiter die beiden Arbeitstemperaturen T1 und T2 auseinanderliegen. Daher rührt die Tendenz, bei Wärmekraftmaschinen große Temperaturdifferenzen zu verwenden. Im nächsten Kapitel wird gezeigt, daß es keine periodisch arbeitende Maschine geben kann, die
wie die reversible CARNOT-Maschine funktioniert und dabei einen höheren
Wirkungsgrad hat als diese.
η=
156
12 Der erste Hauptsatz der Thermodynamik
Kapitel 13
Der zweite Hauptsatz der
Thermodynamik
13.1
Der zweite Hauptsatz der Thermodynamik
Ausgangspunkt der Betrachtungen in diesem Abschnitt ist, daß nicht alle nach
dem ersten Hauptsatz der Thermodynamik, dem Energieerhaltungssatz, möglichen Prozesse in der Natur vorkommen. Mit ihm wäre verträglich, daß ein vom
Dach gefallener Ziegel unter Abkühlung seiner Umgebung die Energie gewinnt,
um wieder auf das Dach zurückzuspringen. Ein solcher Vorgang wird nie beobachtet und ist offenbar unmöglich.
Es gibt noch zahlreiche andere Vorgänge in der Natur, die von selbst nur in
einer bestimmten Richtung ablaufen. Bringt man einen warmen und einen kalten Körper in Kontakt, so fließt Wärme stets vom Körper höherer Temperatur
zum Körper niedrigerer Temperatur, nie aber umgekehrt. Oder wenn ein mit
einem Gas gefüllter Raum mit einem gasleeren Raum verbunden wird, dann
strömt solange Gas in den letzteren, bis sich ein Druckgleichgewicht eingestellt
hat. Nie wird das Gas einen Teil des ihm zur Verfügung stehenden Volumens
von selbst wieder freigeben. Solche Vorgänge bezeichnet man als irreversibel
(unumkehrbar). Sie können nicht rückgängig gemacht werden, ohne daß in der
Umgebung andere Änderungen zurückbleiben.
Nach dem ersten Hauptsatz der Thermodynamik ist die Konstruktion eines
Perpetuum mobile erster Art unmöglich. Technisch gesehen könnte man versuchen, diesen Satz zu umgehen durch die Erfindung einer Maschine, welche
ihren Energiebedarf aus nur einem Wärmereservoir deckt. Ein Beispiel wäre
ein Ozeandampfer, der die zum Betrieb seiner Maschine erforderliche Energie
157
158
13 Der zweite Hauptsatz der Thermodynamik
dem praktisch unbegrenzten Wärmeinhalt des Ozeans entnimmt. Die damit
verbundene Abkühlung des Ozeans würde sogar weitgehend wieder rückgängig
gemacht werden, weil die Arbeit der Maschine zum größten Teil dem Ozean als
Reibungswärme wieder zugeführt würde. Eine solche Maschine bezeichnet man
als Perpetuum mobile zweiter Art. Der zweite Hauptsatz der Thermodynamik
schließt die Existenz einer solchen Maschine aus. Er lautet:
Es ist nicht möglich, eine periodisch arbeitende Maschine zu konstruieren, bei welcher nach einem Umlauf die einzigen Änderungen
darin bestehen, daß Arbeit geleistet und nur ein Wärmereservoir
abgekühlt wurde.
oder auch kurz
Es gibt kein Perpetuum mobile zweiter Art.
Der zweite Hauptsatz ist wie der erste ein Erfahrungssatz. Aus dem zweiten
Hauptsatz läßt sich nun folgender für die Technik sehr wichtige Satz ableiten,
der auch als CARNOTsches Theorem bezeichnet wird.
Es gibt keine periodisch arbeitende Maschine, die wie die reversible
CARNOTsche Maschine aus einem Wärmereservoir der Temperatur T1 Wärme entnimmt, einen Teil davon in Arbeit umwandelt
und den Rest an ein Wärmereservoir mit der tieferen Temperatur T2 abgibt, und die dabei einen größeren Wirkungsgrad hat als
die CARNOTsche Maschine. Arbeitet die betrachtete Maschine reversibel, so ist ihr Wirkungsgrad gleich dem der CARNOTschen
Maschine.
Zum Beweis betrachten wir zum einen die reversible CARNOTsche Maschine
M ′ mit dem Wirkungsgrad η ′ . Wir betreiben sie in umgekehrter Richtung, also
als Wärmepumpe bzw. Kühlmaschine. Wir nehmen nun an, es gäbe eine Maschine M , die wie die CARNOTsche Maschine zwischen den Wärmereservoiren
der Temperatur T1 bzw. T2 arbeitet, aber einen größeren Wirkungsgrad η hat.
Wir werden zeigen, daß diese Annahme zu einem Widerspruch führt. Die in
Vorwärtsrichtung, also als Wärmekraftmaschine arbeitende Maschine M und
die als Wärmepumpe arbeitende CARNOTsche Maschine M ′ werden hintereinandergeschaltet, siehe Abb. 13.1. Die Maschine M entnimmt dem Wärmereservoir der Temperatur T1 die Wärme ∆Q1 , führt an das Wärmereservoir
der Temperatur T2 die Wärme ∆Q2 ab und verrichtet die Arbeit ∆W . Der
CARNOTschen Maschine M ′ wird die Arbeit ∆W ′ zugeführt, sie nimmt aus
dem Wärmeresevoir der Temperatur T2 die Wärmemenge ∆Q′2 auf und gibt an
159
13.1 Der zweite Hauptsatz der Thermodynamik
∆Q′1
∆Q1
6
?
'$
M
-
&%
∆W
T1
'$
-
M′
∆W ′ &%
6
?
T2
∆Q′2
∆Q2
Abbildung 13.1: Zum Beweis des CARNOTschen Theorems
das Wärmereservoir der Temperatur T1 die Wärmemenge ∆Q′1 ab. Gemäß unserer Konvention werden die Größen (∆Q1 , ∆Q′2 , ∆W ) positiv gezählt und die
Größen (∆W ′ , ∆Q2 , ∆Q′1 ) negativ gezählt. Die CARNOTsche Maschine sei so
dimensioniert, daß gilt ∆Q1 =| ∆Q′1 |. Die Wirkungsgrade beider Maschinen
ergeben sich definitionsgemäß zu
η=
∆Q1 − | ∆Q2 |
∆W
=
∆Q1
∆Q1
bzw.
η′ =
| ∆Q′1 | −∆Q′2
| ∆W ′ |
=
.
| ∆Q′1 |
| ∆Q′1 |
Aus unserer Annahme
η > η′
folgt dann wegen ∆Q1 =| ∆Q′1 |
∆W >| ∆W ′ |
bzw.
| ∆Q2 |< ∆Q′2 .
Alle zurückbleibenden Änderungen bestehen somit darin, daß die hintereinandergeschalteten Maschinen während eines Umlaufs die Arbeit ∆W − | ∆W ′ |
nach außen abgeben und dafür dem Wärmereservoir mit der Temperatur T2
die Wärmemenge ∆Q′2 − | ∆Q2 | entziehen. Damit haben wir aber ein Perpetuum mobile zweiter Art konstruiert, was im Widerspruch steht zum zweiten
Hauptsatz der Thermodynamik. Es gilt also
η ≤ η′ ,
(13.1)
160
13 Der zweite Hauptsatz der Thermodynamik
womit der erste Teil des CARNOTschen Theorems bewiesen ist. Arbeitet die
Maschine M reversibel, so können wir sie in umgekehrter Richtung, also als
Wärmepumpe, laufen lassen. Die CARNOTsche Maschine lassen wir dann
ebenfalls umgekehrt, also als Wärmekraftmaschine, arbeiten. Betrachtet man
erneut die Hintereinanderschaltung beider Maschinen, so erhält man ganz analog wie oben einen Widerspruch zu der Annahme η < η ′ . Damit ergibt sich
η ≥ η′ .
Mit Gl. (13.1) folgt dann
η = η′ .
Damit ist auch die zweite Aussage des CARNOTschen Theorems bewiesen.
Die erste Aussage des CARNOTschen Theorems liefert eine obere Schranke
für den Wirkungsgrad von Wärmekraftmaschinen. Für den Wirkungsgrad η
einer periodisch zwischen den Temperaturen T1 und T2 arbeitenden Wärmekraftmaschine gilt
T1 − T2
.
η≤
T1
Die zweite Aussage des CARNOTschen Theorems bedeutet insbesondere,
daß der Wirkungsgrad η einer reversibel arbeitenden CARNOT-Maschine unabhängig ist von der verwendeten Substanz. Es gilt stets
η=
T1 − T2
∆W
=
.
∆Q1
T1
(13.2)
Wird der Kreisprozeß einmal durchlaufen, so hat die innere Energie am Ende
keine Änderung erfahren. Nach dem ersten Hauptsatz muß dann die insgesamt
verrichtete Arbeit ∆W gleich der Summe aller bei einem Umlauf aufgenommenen bzw. abgegebenen Wärmemengen sein, also
∆W = ∆Q1 + ∆Q2 .
Aus Gl. (13.2) folgt damit
T1 − T2
∆Q1 + ∆Q2
=
∆Q1
T1
bzw.
(13.3)
T2
∆Q2
=−
.
T1
∆Q1
Diese Beziehung erlaubt die Festlegung einer von den stofflichen Eigenschaften einer speziellen Substanz völlig unabhängigen Temperaturskala. Setzt
161
13.2 Die Entropie
man eine Temperatur fest, wie z.B. diejenige des Tripelpunktes des Wassers,
T3 = 273, 16 K, so läßt sich jede andere messen, indem man die während eines Umlaufs der CARNOT-Maschine aufgenommene und abgegebene Wärmemenge bestimmt. Die auf diese Weise gewonnene Temperaturskala wird als
thermodynamische Temperaturskala bezeichnet. Sie ist gemäß unserer Herleitung identisch mit der bereits in Kap. 9 mittels des idealen Gases eingeführten
Temperaturskala, siehe Gl. (9.2).
13.2
Die Entropie
In diesem Abschnitt werden wir herleiten, daß aus dem zweiten Hauptsatz der
Thermodynamik die Existenz einer weiteren Zustandsfunktion, der Entropie S,
folgt. Wie wir bereits oben gesehen haben, siehe Gl. (13.3), gilt für jeden
reversiblen CARNOTschen Kreisprozeß
∆Q1 + ∆Q2
T1 − T2
=
∆Q1
T1
bzw.
∆Q1 ∆Q2
+
=0.
T1
T2
Den Quotienten aus aufgenommener (oder abgegebener) Wärme und der Temperatur, bei welcher sie aufgenommen (oder abgegeben) wurde, bezeichnet man
als reduzierte Wärme. Obiges Ergebnis lautet somit in Worten: Die Summe
”
der reduzierten Wärmen ist bei einem reversiblen CARNOTschen Kreisprozeß
gleich Null“.
Wir betrachten nun einen beliebigen reversiblen Kreisprozeß, dargestellt im
p, V -Diagramm, siehe Abb. 13.2. Überdeckt man die p, V -Ebene mit einem
Netz aus Isothermen und Adiabaten, so läßt sich aus Abb. 13.2 entnehmen,
daß man den reversiblen Kreisprozeß beliebig genau durch eine ganze Schar
schmaler, langgezogener CARNOTscher Kreisprozesse approximieren kann.
Man kann sich leicht überzeugen, daß das Durchlaufen aller CARNOTschen
Kreisprozesse äquivalent ist zum Durchlaufen der gezackten Randkurve, die
aus einer Folge sich abwechselnder adiabatischer und isothermer Vorgänge besteht. Das ergibt sich einfach daraus, daß benachbarte CARNOTsche Kreisprozesse die gemeinsame Isotherme in umgekehrter Richtung durchlaufen, und somit heben sich dort die übertragenen Wärmemengen auf. Für das Durchlaufen
der gezackten Randkurve ergibt sich dann
X ∆Qi
i
Ti
=0.
162
13 Der zweite Hauptsatz der Thermodynamik
Abbildung 13.2: Ein beliebiger reversibler Kreisprozeß, dargestellt in einem
p, V -Diagramm
Wählt man nun die Unterteilung durch benachbarte Isothermen immer feiner,
so approximiert die Zackenkurve die Kurve, die den reversiblen Kreisprozeß
darstellt, immer besser. Im Grenzübergang beliebig kleiner Temperaturdifferenz zwischen den Isothermen ergibt sich
I
dQ
=0
T
(13.4)
für einen beliebigen reversiblen Kreisprozeß. Damit haben wir die Möglichkeit,
eine neue Zustandsfunktion, die Entropie S, zu definieren. Wir betrachten im
Raum der unabhängigen Zustandsvariablen, im einfachsten Fall in der p, V Ebene, zwei Zustände unseres Systems, welche durch die Indizes 0 und 1 gekennzeichnet seien, siehe Abb. 13.3. Nunmehr führen wir das System durch
irgendeinen reversiblen Prozeß von dem Zustand 0 in den Zustand 1 über, z.B.
entlang des Weges (a). Die Entropie habe in 0 den willkürlich gewählten Wert
S0 . Dann läßt sich die Entropie im Zustand 1 definieren durch
S1 = S0 +
Z
0
1
dQ
.
T
Die so erklärte Größe S ist tatsächlich eine Zustandsfunktion, d.h. sie ist nur
abhängig vom Wert der Zustandsvariablen an der Stelle 1 und unabhängig von
der Wahl des Weges. Um das einzusehen, betrachten wir irgendeinen anderen
Weg, etwa (b), der die Zustände 0 und 1 verbindet. Dann gilt wegen Gl. (13.4)
13.3 Zunahme der Entropie im abgeschlossenen System
p
6
163
r
1
b
0
r
a
-
V
Abbildung 13.3: Zur Definition der Entropie S
(a)
−(b)
für den geschlossenen Weg 0 → 1 → 0
Z
(a)
dQ Z dQ
−
=0
T
(b) T
oder
Z
(a)
dQ Z dQ
=
.
T
(b) T
Das Integral in der Definition der Entropie ist also unabhängig von der Wahl
des Weges.
13.3
Zunahme der Entropie im abgeschlossenen System
Aus dem zweiten Hauptsatz läßt sich nun folgender fundamentale Satz ableiten:
In einem abgeschlossenen System sind nur solche Zustandsänderungen möglich, bei denen die Entropie entweder zunimmt oder
gleichbleibt.
Sie nimmt zu bei allen natürlichen, mit endlicher Geschwindigkeit ablaufenden
(irreversiblen) Vorgängen. Sie bleibt konstant bei im Idealfall unendlich langsam ablaufenden (reversiblen) Vorgängen. Bevor wir den Beweis dieses Satzes
skizzieren, betrachten wir zwei typische irreversible Vorgänge und berechnen
die jeweilige Zunahme der Entropie.
164
13 Der zweite Hauptsatz der Thermodynamik
Freie Expansion des idealen Gases : Wir betrachten noch einmal die freie
Expansion des idealen Gases von einem kleineren Teilvolumen V1 in das Gesamtvolumen V2 , siehe Abb. 12.3. Da das System gegen Wärmeausgleich isoliert ist, gilt ∆Q = 0. Außerdem haben wir bereits früher gesehen, daß bei
diesem Vorgang die Temperatur konstant bleibt. Für die Änderung der Entropie bei einer isothermen Zustandsänderung ergibt sich
∆S = S2 − S1 =
Z
1
2
1Z2
1
dQ
=
dQ = ∆Q .
T
T 1
T
Die Gleichung ∆Q = 0 könnte nun dazu verleiten, anzunehmen, die Entropie
ändere sich bei diesem Vorgang nicht. Gemäß der Definition der Entropie haben wir aber bei der Berechnung des Integrals in obiger Gleichung reversible
Zustandsänderungen zu betrachten. Wir halten also fest:
Will man die Änderung der Entropie bei einem irreversiblen Vorgang zwischen zwei Gleichgewichtszuständen bestimmen, so muß
man einen reversiblen Ersatzprozeß betrachten, der ebenfalls diese
Gleichgewichtszustände verbindet, und muß für diesen die Entropieänderung berechnen.
Als reversiblen Ersatzprozeß nehmen wir in diesem Fall die isotherme Expansion des idealen Gases. Für die dabei aufgenommene Wärme gilt, siehe auch
Gl. (12.11),
∆Q = ∆W =
Z
V2
V1
p dV = νRT
Z
V2
V1
V2
dV
= νRT ln
.
V
V1
Für die Änderung der Entropie ergibt sich damit
∆S = νR ln
V2
>0.
V1
(13.5)
Die Entropie nimmt also bei der freien Expansion immer zu.
Irreversibler Temperaturausgleich : Wir betrachten zwei identische Metallblöcke, die sich gemeinsam in einem wärmeundurchlässigen Kasten befinden.
Beide Blöcke haben die Masse m und die spezifische Wärmekapazität c, aber
eine unterschiedliche Temperatur. Die zuvor getrennten Blöcke werden nun in
thermischen Kontakt gebracht. Nach einer gewissen Zeit stellt sich die gemeinsame Endtemperatur ein. Auch für diesen irreversiblen Vorgang müssen wir
zur Berechnung der Änderung der Entropie einen reversiblen Ersatzprozeß finden. Wir nehmen dazu ein Temperaturreservoir sehr großer Wärmekapazität,
dessen Temperatur von außen regelbar ist. Wir bringen dieses Reservoir auf
13.3 Zunahme der Entropie im abgeschlossenen System
165
die Temperatur T + ∆T , die Temperatur des heißeren Blockes H, und bringen diesen Block in thermischen Kontakt mit dem Reservoir. Dann verringern
wir die Temperatur des Reservoirs langsam (reversibel) auf die Temperatur T ,
wobei dem Block H Wärme entzogen wird. Da dem Block Wärme entzogen
wird, nimmt seine Entropie ab. Die Änderung der Entropie ergibt sich zu
∆SH =
Z
Z T
mc dT
dT
T
dQ Z T
=
= mc
= mc ln
.
T
T
T + ∆T
T +∆T
T +∆T T
Analog gehen wir mit dem kälteren Block K vor. Durch Kontakt mit dem
regelbaren Temperaturreservoir wird seine Temperatur von T − ∆T auf T
erhöht. Da der Block K dabei Wärme aufnimmt, erhöht sich seine Entropie.
Die Änderung der Entropie dieses Blockes ergibt sich zu
∆SK = mc ln
T
.
T − ∆T
Die Änderung der Entropie des Gesamtsystems ergibt sich durch Addition der
Änderung der Entropien beider Blöcke
∆S = ∆SH + ∆SK = mc ln
bzw.
T
T
+ mc ln
T + ∆T
T − ∆T
T2
>0.
T 2 − ∆T 2
Die Entropie nimmt also auch beim irreversiblen Temperaturausgleich immer
zu.
Nachdem wir für die obigen beiden irreversiblen Vorgänge berechnet haben, daß die Entropie stets zunimmt, kommen wir kurz zur Beweisskizze des
allgemeinen Satzes zu Beginn dieses Abschnitts. Würde in einem abgeschlossenen System spontan eine Zustandsänderung auftreten, die mit einer Abnahme
der Entropie verbunden ist, würde sich also beispielsweise ein Gas in einem
Zylinder spontan in einen Teil des Zylinders zurückziehen, so könnte man
einen Kolben einfügen und anschließend eine isotherme Expansion des Gases durchführen. Die dabei aus dem Wärmereservoir aufgenommene Wärme
würde vollständig in Arbeit umgewandelt. Anschließend würde man diesen
Vorgang wiederholen und hätte so eine periodisch arbeitende Maschine konstruiert, die nichts anderes bewirkt, als Arbeit zu verrichten und gleichzeitig
nur einem Wärmereservoir Wärme zu entziehen. Dies steht aber im Widerspruch zum zweiten Hauptsatz der Thermodynamik. Bei allen von selbst ablaufenden Vorgängen in der Natur kann die Entropie also nur zunehmen (bzw.
gleichbleiben im Idealfall reversibler Zustandsänderungen).
∆S = mc ln
166
13.4
13 Der zweite Hauptsatz der Thermodynamik
Statistische Deutung der Entropie
Wir betrachten noch einmal die freie Expansion eines Gases vom Volumen V1
auf ein Volumen V2 , siehe Abb. 13.4. Die Wahrscheinlichkeit dafür, daß sich ein
p
p p p p
p p
p p
p p
p p p V1p
p
p
p p p
p
p
p
p
p
p
p
p
p
p
p
p
V2
p
p
p
p
p
p
p
p
p
p
Abbildung 13.4: Zur statistischen Deutung der Entropie
Teilchen in dem Teilvolumen V1 befindet, bezogen auf die Wahrscheinlichkeit,
daß es sich in V2 befindet, ist
V1
w1
=
.
w2
V2
Ist beispielsweise V2 das Gesamtvolumen, so ist w2 = 1. Für V1 = 12 V2 ergibt
sich dann w1 = 21 , was unmittelbar einleuchtet.
Für N Teilchen werden die Einzelwahrscheinlichkeiten multipliziert. Man
erhält also als relative Wahrscheinlichkeit dafür, daß sich alle Teilchen in dem
Teilvolumen V1 aufhalten
N
V1
w1
.
=
w2
V2
Wir bilden nun
N
w2
V2
V2
V2
k ln
= k ln
= kN ln
= νR ln
.
w1
V1
V1
V1
Durch Vergleich mit Gl. (13.5) ergibt sich, daß der Ausdruck auf der rechten
Seite der letzten Gleichung gerade die Änderung der Entropie ist. Damit erhält
man
w2
S2 − S1 = ∆S = k ln
= k ln w2 − k ln w1 .
w1
Wir können die Entropie S also auch auf folgende Weise schreiben
S = k ln w .
In Worten ausgedrückt besagt diese Gleichung:
13.4 Statistische Deutung der Entropie
167
Die Entropie eines Sytems in einem bestimmten Zustand ist das
Produkt aus der BOLTZMANN-Konstanten k und dem natürlichen
Logarithmus der Wahrscheinlichkeit w dafür, daß das System diesen Zustand annimmt.
Der Satz über die Zunahme der Entropie, der ja aussagt, daß in einem abgeschlossenen System nur Zustandsänderungen möglich sind, für die
∆S ≥ 0
gilt, läßt sich mit dem obigen Ausdruck für die Entropie neu formulieren.
Wegen der Gleichung
w2
∆S = k ln
w1
ergibt sich folgende äquivalente Formulierung:
In einem abgeschlossenen System sind nur solche Zustandsänderungen möglich, bei denen das System in einen Zustand größerer
oder gleicher Wahrscheinlichkeit übergeht.
Bei allen natürlichen, mit endlicher Geschwindigkeit ablaufenden (irreversiblen) Vorgängen geht das System über in einen Zustand größerer Wahrscheinlichkeit. Bei im Idealfall unendlich langsam ablaufenden (reversiblen)
Vorgängen geht das System über in einen Zustand gleicher Wahrscheinlichkeit.
168
13 Der zweite Hauptsatz der Thermodynamik
Anhang A
Aufgaben mit Lösungen
Hinweis: Bei den folgenden Aufgaben wird für die Erdbeschleunigung der
Wert g = 9, 81 m s−2 benutzt.
Aufgaben zu Kapitel 2
Aufgabe 2.1: Ein Student will seine Freundin mit dem Fahrrad besuchen.
Fährt er mit einer Geschwindigkeit von 10 km/h, kommt er 30 min zu spät.
Fährt er mit einer Geschwindigkeit von 15 km/h, ist er 30 min zu früh da.
(a) Wie weit wohnt die Freundin von ihm entfernt?
(b) Wie schnell muß er fahren, damit er pünktlich ankommt?
Lösung : (a) 30 km, (b) 12 km/h.
Aufgabe 2.2: Berechnen Sie die mittlere Geschwindigkeit in den folgenden
beiden Fällen!
(a) Ein Körper bewegt sich auf dem Weg s mit der Geschwindigkeit v1 , dann
auf einem gleich großen Wegabschnitt mit der Geschwindigkeit v2 .
(b) Ein Körper bewegt sich während der Zeitspanne t mit der Geschwindigkeit
v1 und anschließend während einer gleich langen Zeitspanne mit der Geschwindigkeit v2 .
(c) Wie groß sind die mittleren Geschwindigkeiten in beiden Fällen für
v1 = 30 km/h und v2 = 60 km/h?
2
1 v2
, (b) v1 +v
, (c) 40 km/h, 45 km/h.
Lösung : (a) v2v1 +v
2
2
Aufgabe 2.3: Um einen Astronauten auf eine erdnahe Umlaufbahn zu bringen, muß er von der Geschwindigkeit 0 km/s auf die Geschwindigkeit 7, 9 km/s
(erste kosmische Geschwindigkeit) beschleunigt werden. Nehmen Sie an, daß
die Startphase mit einer konstanten Beschleunigung von 4 g erfolgt.
169
170
A Aufgaben mit Lösungen
(a) Wieviel Zeit benötigt die Rakete, um diese Bahngeschwindigkeit zu erreichen?
(b) Wie weit fliegt sie während dieser Zeit?
Lösung : (a) 201 s, (b) 795 km.
Aufgabe 2.4: Nach einer Faustformel hängt der Bremsweg s eines Pkws von
der Anfangsgeschwindigkeit v0 (Geschwindigkeit direkt vor dem Einsetzen des
Bremsvorgangs) folgendermaßen ab:
s=
v0
10 km/h
!2
m.
Welche Bremsbeschleunigung liegt diesem Ansatz zugrunde?
Lösung : −3, 86 m/s2 .
Aufgabe 2.5: Eine Rakete wird vertikal gestartet und steigt während der
Zeit tB mit einer konstanten, vertikalen Beschleunigung a an. Dann ist ihr
Treibstoffvorrat erschöpft, und sie bewegt sich ohne Antrieb weiter.
(a) Welche Höhe wird maximal erreicht?
(b) Wie groß ist die Höhe, wenn tB = 1 min und a = 20 m/s2 ist?
Lösung : (a) 12 at2B 1 + ag , (b) 109 km.
Aufgabe 2.6: Ein Auto fährt auf einer geraden Straße. Es wird dann mit
konstanter Bremsbeschleunigung abgebremst. Dabei verringert sich seine Geschwindigkeit von 90 km/h auf 36 km/h auf einer Strecke von 100 m.
(a) Wie groß ist die Bremsbeschleunigung?
(b) Wieviel Zeit benötigt der Abbremsvorgang?
Lösung : (a) −2, 63 m/s2 , (b) 5, 71 s.
Aufgabe 2.7: Ein Auto, das mit einer Bremsbeschleunigung von −4 m/s2
abgebremst werden kann, fährt bei Nebel. Die Sichtweite beträgt 30 m. Die Reaktionszeit des Fahrers (Zeitspanne zwischen dem Erkennen des Hindernisses
und dem Ansprechen der Bremsen) beträgt 0, 5 s. Wie groß darf die Geschwindigkeit des Autos sein, damit es bei Auftreten eines Hindernisses gerade noch
zum Stehen gebracht werden kann?
Lösung : 49 km/h.
Aufgabe 2.8: Ein Mann wirft in einem Abstand von 2 s mit derselben Anfangsgeschwindigkeit v0 zwei Bälle senkrecht nach oben . 0, 4 s nach dem Abwurf des zweiten Balles sieht er die Bälle zusammenstoßen.
(a) Wie groß ist die Anfangsgeschwindigkeit der Bälle?
(b) In welcher Höhe über der Abwurfstelle treffen sie zusammen?
Lösung : (a) 13, 7 m/s, (b) 4, 71 m.
171
Aufgaben zu Kapitel 3
Aufgabe 3.1: Ein Körper bewegt sich auf einer ebenen Kurve. Bei Verwendung von kartesischen Koordinaten ist die Bahnkurve gegeben durch die
Zeitfunktionen
x(t) = c3 t3 + c2 t2
,
y(t) = d2 t2 + d1 t + d0 .
Die Koeffizienten haben die Werte c3 = 2 m/s3 , c2 = −3 m/s2 , d2 = 1 m/s2 ,
d1 = −2 m/s und d0 = 1 m. Berechnen Sie
(a) den Betrag der Geschwindigkeit zur Zeit t = 2 s,
(b) den Betrag der Beschleunigung zur Zeit t = 2 s!
(c) Verschaffen Sie sich einen ungefähren Überblick über die geometrische Form
der Kurve!
Lösung : (a) 12, 2 m/s, (b) 18, 1 m/s2 .
Aufgabe 3.2: Ein Flugzeug hat eine Geschwindigkeit vF relativ zur Luft. Es
führt fahrplanmäßig Hin- und Rückflüge zwischen zwei Städten A und B aus,
die eine Entfernung von 2s haben. Wie lange dauert ein Hin- und Rückflug (bei
Vernachlässigung der Start- und Landezeiten)
(a) an einem windstillen Tag,
(b) an einem Tag, an dem der Wind mit einer Geschwindigkeit vW von B nach
A weht,
(c) an einem Tag, an dem Seitenwind mit einer Geschwindigkeit vW herrscht?
(d) Welche Werte ergeben sich in (a), (b) und (c), wenn vF = 320 km/h,
s
= 640 km und vW = 80 km/h ist?
2
Lösung : (a)
4, 13 h.
s
vF
, (b)
s
vF
1−
vW
vF
2 −1
, (c)
s
vF
1−
vW
vF
2 − 21
, (d) 4 h, 4, 27 h,
Aufgabe 3.3: Welche Höhe H und welche Weite R erreicht eine Feuerwehrspritze bei einem Winkel von 300 , 450 und 600 gegen die Waagerechte, wenn
sie mit senkrechtem Strahl eine Höhe von 22 m erzielt?
Lösung : Bei 300 : H = 5, 5 m, R = 38, 1 m; bei 450 : H = 11, 0 m, R = 44, 0 m;
bei 600 : H = 16, 5 m, R = 38, 1 m.
Aufgabe 3.4: Eine Signalrakete leuchtet 6 s nach dem Start auf. Sie wird
unter einem Winkel von 450 gegenüber der Waagerechten abgeschossen.
(a) Wie groß muß ihre Anfangsgeschwindigkeit v0 sein, damit sie im höchsten
Punkt ihrer Bahn aufleuchtet?
(b) Wie hoch liegt dieser Punkt über dem Abschußort?
Lösung : (a) 83, 2 m/s, (b) 177 m.
172
A Aufgaben mit Lösungen
Aufgabe 3.5: Ein Zug fährt mit einer Geschwindigkeit von 72 km/h über eine
Brücke. Unter der Brücke befindet sich ein 50 m breiter Fluß. Neben dem Fluß,
in einem Abstand von 5 m, verläuft eine 20 m breite Straße. Der Zug fährt so
über die Brücke, daß er zunächst den Fluß und dann die Straße überquert.
Genau über der Mitte des Flusses läßt ein Fahrgast einen Gegenstand aus dem
Fenster fallen.
(a) Wo sieht der Fahrgast den Gegenstand auftreffen, wenn die Straße 19, 62 m
und der Fluß 22 m unter dem Zugfenster liegt?
(b) Wo befindet sich der Fahrgast im Moment des Auftreffens?
Lösung : (a) Mitten auf der Straße, (b) Genau über dem Auftreffpunkt.
Aufgabe 3.6: Ein Junge wirft von einem 8 m hohen Ufer einen Stein in
einen See. Er wirft den Stein unter einem Winkel von 37, 50 gegenüber der
Horizontalen ab. Die Anfangsgeschwindigkeit sei 15 m/s.
(a) Wie weit fliegt der Stein?
(b) Käme der Stein weiter, wenn er unter einem Winkel von 450 abgeworfen
würde?
Lösung : (a) 29, 88 m, (b) Nein, die Wurfweite beträgt in diesem Fall nur
29, 22 m.
Aufgabe 3.7: In einer Oszillographenröhre tritt ein Elektronenstrahl mit einer Geschwindigkeit von 107 m/s horizontal in einen Plattenkondensator ein,
dessen horizontal liegende Platten eine Länge von 2 cm haben. Das elektrische
Feld im Kondensator bewirkt eine vertikal nach unten gerichtete konstante
Beschleunigung von 1015 m/s2 . Berechnen Sie
(a) die vertikale Verschiebung des Elektronenstrahls,
(b) Betrag und Richtung der Elektronengeschwindigkeit beim Austritt der
Elektronen aus dem Kondensator! Die Richtung soll angegeben werden durch
den Winkel der Elektronengeschwindigkeit gegenüber der Horizontalen.
Lösung : (a) 2 mm, (b) 1, 02 107 m/s, 11, 30 .
Aufgabe 3.8: Ein Teilchen bewegt sich auf einem Kreis vom Radius r mit
konstanter Winkelgeschwindigkeit ω. Die Bewegung beginnt zur Zeit t = 0 an
der Stelle x = r, y = 0 und erfolgt entgegen dem Uhrzeigersinn. Benutzen Sie
zur Beschreibung der Bewegung kartesische Koordinaten!
(a) Berechnen Sie x(t), y(t), vx (t), vy (t), ax (t), ay (t)!
(b) Zeigen Sie mit Hilfe von vx (t) und vy (t), daß für den Betrag der Geschwindigkeit v = ωr gilt!
(c) Zeigen Sie, daß der Beschleunigungsvektor ~a mit dem Ortsvektor ~r verknüpft ist durch ~a = −ω 2 r ~ˆr !
Aufgabe 3.9: Ein Rad führt bei gleichförmiger Drehung 53 Umdrehungen in
173
10 s aus. Wie groß sind
(a) die Umlauffrequenz,
(b) die Umlaufsdauer,
(c) die Winkelgeschwindigkeit?
(d) Welchen Drehwinkel überstreicht das Rad in 2, 6 s?
Lösung : (a) 5, 3 s−1 , (b) 0, 189 s, (c) 33, 3 s−1 , (d) 86, 6 rad.
Aufgabe 3.10: Ein mit Wasser gefülltes Glas rotiert auf einer vertikalen
Kreisbahn mit 1, 5 m Durchmesser. Wie groß muß die Umlauffrequenz mindestens sein, damit kein Wasser ausläuft?
Lösung : 34, 5 min−1 .
Aufgabe 3.11: (a) Welche Geschwindigkeit muß ein erdnaher Satellit haben,
wenn er sich gleichförmig auf einer Kreisbahn um die Erde bewegen soll? Der
Erdradius beträgt 6370 km.
(b) Wie groß ist dann seine Umlaufzeit?
Lösung : (a) 7, 9 km/s, (b) 84 min.
Aufgabe 3.12: (a) Mit welcher Geschwindigkeit bewegt sich infolge der
gleichförmigen Erdrotation ein Punkt auf dem Äquator, wenn der Erdradius 6370 km beträgt? Welche Zentripetalbeschleunigung herrscht dort?
(b) Welche Werte ergeben sich für einen Punkt der geographischen Breite
ϕ = 53, 50 (Hamburg)?
Lösung : (a) 1668 km/h, 0, 0337 m/s2 , (b) 992 km/h, 0, 02 m/s2 .
Aufgabe 3.13: Ein Schwungrad hat die Umlauffrequenz f0 = 500 min−1 und
wird mit der Winkelbeschleunigung 5 s−2 während einer Zeit von 15 s beschleunigt. Welche Umlauffrequenz wird erreicht?
Lösung : 1216 min−1 .
Aufgabe 3.14: Ein Rad mit einem Durchmesser von 0, 8 m läuft aus dem
Stillstand mit der konstanten Winkelbeschleunigung 15 s−2 an.
(a) Wie groß sind Tangential-, Zentripetal- und Gesamtbeschleunigung eines
Punktes des Umfangs nach 20 Sekunden? Fertigen Sie eine Skizze an!
(b) Welchen Winkel bilden Zentripetal- und Gesamtbeschleunigung in diesem
Moment?
Lösung : (a) 6 m/s2 , 3, 6 104 m/s2 , 3, 6 104 m/s2 (b) 34′′ .
Aufgabe 3.15: Ein zuvor ruhendes Rad beginnt, sich mit der konstanten
Winkelbeschleunigung 0, 04 s−2 zu drehen. Nach welcher Zeit, vom Beginn
der Drehbewegung an gerechnet, sind für einen beliebigen Punkt des Rades
Zentripetal- und Tangentialbeschleunigung gleich groß?
Lösung : 5 s.
174
A Aufgaben mit Lösungen
Aufgabe 3.16: Ein Elektromotor wird bei einer Drehzahl von 3600 Umdrehungen pro Minute ausgeschaltet und bleibt bei gleichmäßiger Abbremsung
nach 100 s stehen.
(a) Wie groß ist die Winkelbeschleunigung?
(b) Wieviel Umdrehungen macht er bis zum Stillstand?
Lösung : (a) −3, 77 s−2 , (b) 3000 Umdrehungen.
Aufgaben zu Kapitel 4
Aufgabe 4.1: An einer Schnur hängt ein Block der Masse 2 kg. An diesem
hängt mittels eines weiteren Stückes Schnur ein zweiter der Masse 4 kg. Die
Blöcke werden durch die Schwerkraft nach unten gezogen.
(a) Mit welcher Kraft muß an der oberen Schnur gezogen werden, damit die
Blöcke in Ruhe bleiben?
(b) Mit welcher Kraft muß an der oberen Schnur gezogen werden, damit sich
die Blöcke mit einer Beschleunigung von 2 m/s2 nach oben bewegen? Wie groß
ist dann die Zugkraft in der unteren Schnur?
Lösung : (a) 58, 86 N, (b) 70, 86 N, 47, 24 N.
Aufgabe 4.2: Bei einem Wandkran hat die Zugstange eine Länge von 3, 5 m,
die Strebe eine Länge von 5, 0 m. Die Wandbefestigungen liegen 1, 85 m auseinander. Welche Zug- und Druckkraft ruft eine Last von 74 kN in den Stangen
hervor?
Lösung : Zugstange: 140 kN, Strebe: 200 kN.
3, 5 m
1, 85 m
5, 0 m
Aufgabe 4.3: Vier identische Blöcke der Masse m werden durch die links auf
Block 1 wirkende Schubkraft F über eine reibungsfreie Unterlage geschoben.
Bestimmen Sie
(a) die Beschleunigung der Blöcke,
(b) die Kraft, die Block 1 auf Block 2 ausübt!
F
Lösung : (a) 4m
, (b) 0, 75 F .
175
Aufgabe 4.4: An einem Telegrafenmast werden von acht horizontal ankommenden Leitungsdrähten drei um 600 nach links und fünf um 500 nach rechts
abgelenkt. Jeder Draht ist so gespannt, daß er eine waagerechte Zugkraft von
400 N ausübt.
(a) Welchen Betrag hat die Resultierende aller Zugkräfte?
(b) Unter welchem Winkel muß ein waagerechter Ankerdraht, der den Mastkopf mit einer Gebäudewand verbindet, angeordnet werden, damit der Mast
gegen Verbiegungen geschützt ist? Geben Sie den Winkel an bezogen auf die
Richtung, die durch die ankommenden Drähte vorgegeben ist!
Lösung : (a) 1, 4 kN, (b) 20, 50 .
Aufgabe 4.5: Ein Mann stellt sich in einem Aufzug auf eine Personenwaage
(Federwaage). Solange der Aufzug steht, zeigt die Waage 75 kg an. Während
des Anfahrens mit konstanter Beschleunigung zeigt sie 82 kg an.
(a) Welche Beschleunigung hat der Aufzug?
(b) Wie groß ist während des Anfahrens die Zugkraft im Tragseil, wenn der
leere Aufzug eine Masse von 400 kg hat?
Lösung : (a) 0, 916 m/s2 , (b) 5095 N.
Aufgabe 4.6: Eine Feder wird von einer Kraft F1 = 4, 81 N auf eine Länge
l1 = 61, 5 mm und von einer Kraft F2 = 9, 75 N auf eine Länge l2 = 80, 5 mm
gedehnt.
(a) Wie groß ist die Federkonstante D?
(b) Wie lang ist die Feder im unbelasteten Zustand?
(c) Welche Kraft dehnt die Feder auf eine Länge von l2 = 100 mm?
Lösung : (a) 260 N/m, (b) 43 mm, (c) 14, 8 N.
Aufgabe 4.7: Betrachten Sie n parallel hängende Schraubenfedern mit den
Federkonstanten D1 , D2 , . . . , Dn ! Sie werden gemeinsam um dieselbe Strecke
gedehnt. Zeigen Sie, daß den n parallelen Federn insgesamt die Federkonstante
D = D1 + D2 + · · · + D n
zugeordnet werden kann!
Aufgabe 4.8: Betrachten Sie n hintereinander hängende Schraubenfedern
mit den Federkonstanten D1 , D2 , . . . , Dn ! Zeigen Sie, daß den n hintereinander
hängenden Federn insgesamt eine Federkonstante gemäß
1
1
1
1
+
+ ··· +
=
D
D1 D2
Dn
zugeordnet werden kann!
176
A Aufgaben mit Lösungen
Aufgabe 4.9: Mit welcher Kraft ziehen sich zwei Platinkugeln der Masse
1 kg an, wenn sie sich berühren? Die Dichte von Platin beträgt 21, 5 g/cm3 .
Lösung : 3, 35 10−8 N.
Aufgabe 4.10: (a) Wie groß ist die Fallbeschleunigung 1000 km über der
Erdoberfläche?
(b) Welchen Wert hat die Umlaufsdauer eines Satelliten, der in dieser Höhe
die Erde umkreist?
Lösung : (a) 7, 35 m/s2 , (b) 105 min.
Aufgabe 4.11: Ein Draht reiße unter einer Zugspannung von 1000 N. Der
Draht werde nun benutzt, um einen Klotz über den Boden zu ziehen. Dabei
kann der Draht mit der Horizontalen durchaus einen Winkel bilden. Welches
Gewicht darf der Klotz maximal haben, wenn man ihn auf diese Weise in
Bewegung setzen will, ohne daß der Draht reißt? Der Haftreibungskoeffizient
zwischen Klotz und Boden betrage µ0 = 0, 35.
Lösung : 3027 N.
Aufgabe 4.12: Bei welchem Anstieg einer Bahnstrecke beginnen die Räder
einer 60 t schweren Lokomotive, die einen Zug der Gesamtmasse (einschließlich
Lok) von 800 t zieht, zu rutschen? Der Haftreibungskoeffizient zwischen den
Triebrädern und den Schienen beträgt µ0 = 0, 15, der Fahrwiderstandskoeffizient des Zuges beträgt µF = 0, 002.
1
.
Lösung : tan α = 108
Aufgabe 4.13: Ein Gegenstand befinde sich auf einer schiefen Ebene mit
dem Neigungswinkel α.
(a) Wie groß muß der Haftreibungskoeffizient sein, damit der Gegenstand gerade noch nicht abgleitet?
(b) Welche Beschleunigung erfährt der Gegenstand, wenn er abwärts gleitet
und dabei außer der Gewichtskraft und der Gleitreibungskraft eine in Richtung des Hangabtriebs zeigende Kraft F wirkt?
(c) Welche zur Hangabtriebskraft antiparallele Kraft Fmin ist erforderlich, um
den Gegenstand mit konstanter Geschwindigkeit nach oben zu verschieben?
(d) Welche Beschleunigung erfährt der Gegenstand, wenn die zur Hangabtriebskraft antiparallele Kraft F größer als Fmin ist?
F
+ g(sin α − µ cos α), (c) mg(sin α + µ cos α),
Lösung : (a) µ0 = tan α, (b) m
F
(d) m − g(sin α + µ cos α).
Aufgabe 4.14: Der Waggon eines Zuges ist mit Kisten beladen, die mit dem
Boden des Waggons einen Haftreibungskoeffizienten von µ0 = 0, 25 besitzen.
Der Zug fährt mit einer Geschwindigkeit von 48 km/h. Auf welcher kürzesten
177
Strecke kann der Zug zum Stehen gebracht werden, ohne daß die Kisten anfangen zu rutschen?
Lösung : 36, 24 m.
Aufgabe 4.15: Auf einem Wagen ist ein Ständer montiert, an welchem ein
Pendel der Masse 10 kg hängt, siehe Abb. 4.8. Berechnen Sie den Winkel ϕ,
den das Pendel mit der Normale zur Bodenfläche des Wagens bildet, und die
Fadenspannung Fs ,
(a) wenn sich der Wagen auf einer waagerechten Ebene gleichförmig bewegt,
(b) wenn sich der Wagen auf einer waagerechten Ebene mit 1 m/s2 beschleunigt bewegt,
(c) wenn der Wagen eine schiefe Ebene mit dem Neigungswinkel α = 200 reibungsfrei hinabrollt!
Lösung : (a) 00 , 98, 1 N, (b) 5, 820 , 98, 6 N, (c) 00 , 92, 2 N.
Aufgabe 4.16: Die Kurve einer Autobahn, deren Radius 300 m beträgt,
ist nicht überhöht. Angenommen, der Haftreibungskoeffizient zwischen Reifen
und trockenem Asphalt sei 0, 85, zwischen Reifen und nassem Asphalt 0, 45.
Berechnen Sie die maximale Geschwindigkeit in km/h, mit der man die Kurve
noch sicher durchfahren kann, an einem trockenen Tag und an einem Regentag!
Lösung : 180 km/h, 131 km/h.
Aufgabe 4.17: Welche Neigung gegen die Waagerechte muß eine Kurve mit
800 m Radius haben, damit bei einer Fahrzeuggeschwindigkeit von 100 km/h
die Resultierende aus Gewichtskraft und Zentrifugalkraft senkrecht auf der
Straßenoberfläche steht?
Lösung : 5, 60 .
Aufgabe 4.18: Die Masse der Erde beträgt 5, 98 1024 kg. Angenommen die
Erde sei eine Kugel mit dem Radius 6370 km. Um welchen Winkel weicht
die Resultierende aus Gravitationskraft und Zentrifugalkraft von der zum
Erdmittelpunkt zeigenden Normalen an einem Ort der geographischen Breite
ϕ = 53, 50 (Hamburg) ab?
Lösung : 5′ 38′′ .
Aufgabe 4.19: Bei einem Kettenkarussell sind die Sitze so angebracht, daß
der Schwerpunkt eines Mitfahrers 6 m von der Aufhängung der Ketten entfernt
ist. Die Aufhängung der Ketten ist 4 m von der Drehachse entfernt. Mit wieviel
Umdrehungen pro Minute muß sich das Karussell drehen, damit die Ketten um
einen Winkel von 300 nach außen schwenken?
Lösung : 8, 6 min−1 .
178
A Aufgaben mit Lösungen
Aufgaben zu Kapitel 5
Aufgabe 5.1: Eine Feder mit der Federkonstanten D = 8000 N/m wird um
3 cm zusammengedrückt. Bei der Entspannung schießt sie eine Kugel der Masse
10 g in die Höhe. Wie hoch steigt die Kugel?
Lösung : 36, 7 m.
Aufgabe 5.2: Mit Hilfe einer 2 m langen Rampe soll eine Last vom Gewicht
1, 5 kN auf eine Höhe von 1, 1 m geschoben werden. Der Gleitreibungskoeffizient sei 0, 15. Welche Arbeit muß verrichtet werden?
Lösung : 2, 0 kJ.
Aufgabe 5.3: Eine Feder wird durch eine Kraft von 50 N vorgespannt. Durch
Vergrößern der Kraft um 150 N dehnt sich die Feder um 45 cm. Welche Spannarbeit ist für die zusätzliche Dehnung notwendig?
Lösung : 56 J.
Aufgabe 5.4: Ein Lkw mit einem Gewicht von 100 kN soll auf horizontaler
Straße in 30 s aus dem Stand auf die Geschwindigkeit 54 km/h gebracht werden. Der Fahrwiderstandskoeffizient sei 0, 02. Wie groß sind
(a) die Beschleunigungsarbeit,
(b) die Reibungsarbeit?
Lösung : (a) 1, 15 MJ, (b) 0, 45 MJ.
Aufgabe 5.5: Ein Pendel bestehe aus einem masselosen Stab der Länge L,
an dessen einem Ende eine Kugel der Masse m befestigt ist. An dem anderen
Ende ist der Stab drehbar aufgehängt. Das Pendel wird nun so weit ausgelenkt,
daß es senkrecht nach oben zeigt, und dann losgelassen.
(a) Wie groß ist seine Geschwindigkeit im tiefsten Punkt?
(b) Welche Zugkraft wirkt in diesem Augenblick auf die Aufhängung?
Dasselbe Pendel wird in einem neuen Versuch so weit ausgelenkt, daß es eine
horizontale Lage einnimmt, und dann losgelassen.
(c) Bei welchem Winkel mit der Vertikalen ist die Zugkraft in dem Stab vom
Betrag her genauso√groß wie das Gewicht der Kugel?
Lösung : (a) v = 2 gl, (b) Fs = 5mg, (c) 70, 50 .
Aufgabe 5.6: (a) Welche Arbeit verrichtet eine Lokomotive von 100 t, die 10
Wagen mit je 25 t auf einer ebenen Strecke von 750 m Länge aus dem Stand
auf eine Geschwindigkeit von 15 m/s beschleunigt, wenn eine Reibungskraft
von 3 104 N wirkt?
(b) Unter der Annahme, daß die Beschleunigung konstant ist, berechne man,
welche Leistung die Maschine zu dem Zeitpunkt abgeben muß, in dem die
179
Geschwindigkeit 10 m/s beträgt.
Lösung : (a) 61, 88 MJ, (b) 825 kW.
Aufgabe 5.7: Ein Lkw der Masse 5 t fährt eine Strecke, die auf 5 km um 70 m
ansteigt, in beiden Richtungen mit der gleichen Geschwindigkeit von 45 km/h.
Der Fahrwiderstandskoeffizient beträgt 0,04, der Luftwiderstand 500 N. Welche Leistung muß der Motor in beiden Fällen zur Bewegung des Fahrzeugs
abgeben?
Lösung : 39, 4 kW, 22, 2 kW.
Aufgabe 5.8: Ein Lkw kann eine Strecke, die auf 1 km um 20 m ansteigt, mit
einer Geschwindigkeit von 30 km/h bergauffahren. Der Fahrwiderstandskoeffizient beträgt µF = 0, 04. Mit welcher Geschwindigkeit fährt der Lkw bergab,
wenn er bergab mit derselben Leistung wie bergauf fährt?
Lösung : 90 km/h.
Aufgabe 5.9: Ein frei hängendes Fadenpendel der Länge l wird um 900 ausgelenkt, so daß es eine horizontale Lage einnimmt. Im Abstand d unterhalb des
Aufhängepunktes ist ein Nagel angebracht. Wie groß muß d im Verhältnis zur
Pendellänge l mindestens sein, damit die Kugel des Pendels einen vollständigen
Überschlag schafft, also einen vollständigen Kreis durchläuft mit dem Nagel
als Mittelpunkt?
Lösung : d = 53 l.
l
p
u
d
Np
u
Aufgabe 5.10: (a) Wieviel Energie ist nötig, um ein Flugzeug von 6 t auf
eine Höhe von 12 km und eine Geschwindigkeit von 1060 km/h zu bringen?
(b) Welche mittlere Leistung muß den Motoren bei einem Wirkungsgrad von
20 % zugeführt werden, wenn dies in 5 min erreicht sein soll?
Lösung : (a) 966 MJ, (b) 16, 1 MW.
Aufgabe 5.11: Der Nullpunkt der potentiellen Energie im Gravitationsfeld
der Erde liege im Unendlichen.
(a) Welche potentielle Energie hat eine Masse von 1 kg auf der Erdoberfläche?
Der Erdradius beträgt 6370 km.
(b) Welche potentielle Energie hat sie 105 km vom Erdmittelpunkt entfernt?
180
A Aufgaben mit Lösungen
(c) Welche Arbeit ist nötig, um die Masse von der Erdoberfläche zu einem
Punkt zu bringen, der 105 km vom Erdmittelpunkt entfernt ist?
Lösung : (a) −62, 64 MJ, (b) −3, 99 MJ, (c) 58, 65 MJ.
Aufgabe 5.12: Zwei Körper der Massen m1 und m2 sind durch einen Faden
verbunden, der über eine reibungsfreie Rolle läuft, siehe untenstehende Abbildung! Sie werden aus der Ruhe losgelassen und setzen sich beschleunigt in
Bewegung. Der Gleitreibungskoeffizient zwischen dem Körper mit der Masse
m1 und der Unterlage sei µ. Berechnen Sie
(a) die Beschleunigung, mit der sich die Körper in Bewegung setzen,
(b) die Geschwindigkeit, mit der sich die Körper bewegen, nachdem sie die
Wegstrecke l zurückgelegt haben,
(c) die Fadenspannung Fs !
(d) Welche Werte ergeben sich unter (a), (b) und (c), wenn m1 = m2 = 1 kg,
µ = 0, 1 und l = 1 m ist?
q
g(1+µ)
2(m2 −µm1 )gl
1 )g
,
(b)
v
=
,
(c) Fs = m1mm12+m
,
Lösung : (a) a = (mm2 −µm
m1 +m2
1 +m2
2
2
(d) a = 4, 42 m/s , v = 2, 97 m/s, Fs = 5, 4 N.
m1
j
m2
Aufgabe 5.13: Betrachten Sie noch einmal die Anordnung aus der vorigen
Aufgabe, allerdings mit folgender Änderung! Nachdem der Körper mit der
Masse m2 um die Höhe h nach unten gesunken ist, setzt er auf dem Boden auf.
Der Körper der Masse m1 bewegt sich noch um das Wegstück s weiter, bis er
auf Grund der Gleitreibung mit der Unterlage zum Stillstand kommt.
(a) Aus den Größen m1 , m2 , h und s läßt sich der Gleitreibungskoeffizient µ
berechnen. Geben Sie die entsprechende Formel an!
(b) Welcher Wert ergibt sich für µ, wenn m1 = 200 g, m2 = 20 kg, h = 20 cm
und s = 50 cm ist ?
m2 h
, (b) 0, 39.
Lösung : (a) µ = m1 h+(m
1 +m2 )s
Aufgabe 5.14: Ein kleiner Körper der Masse m ist an einem Faden der Länge
181
r befestigt und bewegt sich reibungsfrei auf einer vertikalen Kreisbahn.
(a) Wie groß muß die Geschwindigkeit v des Körpers im höchsten Punkt mindestens sein, damit die Kreisbahn vollständig durchlaufen wird?
Das Fadenpendel wird nun angestoßen, und zwar so, daß die Geschwindigkeit
v0 im höchsten Punkt der Kreisbahn größer ist als die unter (a) ermittelte. Es
schwingt also vollständig um den Aufhängepunkt. Berechnen Sie die Fadenspannung Fs
(b) im höchsten Punkt der Kreisbahn,
(c) in einem Punkt, in dem der Faden horizontal verläuft,
(d) im tiefsten Punkt der Kreisbahn!
√
v2
v2
(c) Fs = m r0 + 2mg,
(b) Fs = m r0 − mg,
Lösung : (a) v = gr,
v2
(d) Fs = m r0 + 5mg.
Aufgaben zu Kapitel 6
Aufgabe 6.1: Man betrachte eine Bierdose. Sie habe die Höhe H. Ist die
Dose voll, so befindet sich der Schwerpunkt in der Höhe H2 . Wird sie nun entleert, so sinkt der Schwerpunkt zunächst ab. Ist die Dose aber schließlich leer,
so befindet sich der Schwerpunkt wieder in der Höhe H2 .
(a) Bei welcher Füllhöhe h erreicht der Schwerpunkt der Bierdose samt Inhalt
seine tiefste Lage? Drücken Sie das Ergebnis zunächst allgemein aus durch die
Höhe H der Dose, die Masse M der Dose und die Masse m der Gesamtfüllung!
(b) Wo liegt der Schwerpunkt in diesem Fall?
(c) Wie lautet das Ergebnis für M = 100 g und m = 300 g?
(d) Kann man das allgemeine Ergebnis auch ohne große Rechnung durch eine
physikalische Überlegung gewinnen?
r
M
H+ M
+ 1 H, (b) Der Schwerpunkt befindet
Lösung : (a) h = − M
m
m m
sich genau in der Füllhöhe h, liegt also in der Oberfläche der Flüssigkeit,
(c) h = 31 H.
Aufgabe 6.2: Am Ende eines zylindrischen Stabes der Länge 20 cm und dem
Durchmesser 16 mm soll eine Kugel aus gleichem Material angefügt werden,
so daß der Schwerpunkt in die punktförmige Nahtstelle fällt. Welchen Radius
muß die Kugel erhalten?
Lösung : 3, 13 cm.
Aufgabe 6.3: Bei der chemischen Reaktion H + Cl −→ H Cl bewegte sich
das H-Atom vor dem Stoß in Richtung der x-Achse mit der Geschwindigkeit
7, 5 103 m/s. Das Cl-Atom bewegte sich in Richtung der y-Achse mit der Ge-
182
A Aufgaben mit Lösungen
schwindigkeit 1, 8 104 m/s. Die Masse des Cl-Atoms ist 35 mal so groß wie die
des H-Atoms. Berechnen Sie den Betrag und die Richtung (relativ zur x-Achse)
der Geschwindigkeit des entstehenden H Cl-Moleküls!
Lösung : 1, 75 104 m/s, 89, 30 .
Aufgabe 6.4: Eine Pistolenkugel der Masse 10 g wird zur Bestimmung ihrer
Geschwindigkeit in eine mit Sand gefüllte Kiste der Masse 20 kg hineingeschossen, die an einem 3 m langen Draht als Pendel aufgehängt ist. Welche
Geschwindigkeit besaß die Kugel beim Einschuß, wenn die Kiste dabei einen
horizontalen Ausschlag von 7, 5 cm erhält?
Hinweis: Zeigen Sie zunächst, daß zwischen der Hubhöhe h, dem horizontalen
Ausschlag s und der Drahtlänge l der Zusammenhang (h − l)2 + s2 = l2 besteht und daß daraus wegen l ≫ h die Beziehung s2 = 2lh folgt!
Lösung : 271 m/s.
Aufgabe 6.5: Eine Kugel der Masse m1 und der Geschwindigkeit v1 stößt
zentral und elastisch auf eine ruhende Kugel der Masse m2 .
(a) Wie groß ist der Bruchteil der kinetischen Energie der stoßenden Kugel vor
dem Stoß, der auf die gestoßene Kugel übertragen wird, in Abhängigkeit vom
Massenverhältnis m2 /m1 ?
(b) Berechnen Sie mit Hilfe des Ergebnisses von (a) folgende Spezialfälle, bei
denen ein Neutron n auf einen ruhenden Atomkern stößt,
m2 = m1 (z.B. Stoß eines n mit einem 1 H-Kern),
m2 = 12 m1 (z.B. Stoß eines n mit einem 12 C-Kern),
m2 = 206 m1 (z.B. Stoß eines n mit einem 206 Pb-Kern)!
Geben Sie den Bruchteil
der
übertragenen kinetischen Energie in % an!
−2
2
2
1+ m
, (b) 100 %, 28, 4 %, 1, 92 %.
Lösung : (a) 4 m
m1
m1
Aufgabe 6.6: Eine Kugel der Masse 4 kg und der Geschwindigkeit 6 m/s
holt eine andere Kugel mit der Masse 10 kg ein und stößt mit dieser zentral
und elastisch zusammen. Die leichtere Kugel kommt dabei zur Ruhe.
(a) Wie groß war die Geschwindigkeit der schwereren Kugel vor dem Stoß?
(b) Wie groß ist die Geschwindigkeit der schwereren Kugel nach dem Stoß?
Lösung : (a) 1, 8 m/s, (b) 4, 2 m/s.
Aufgabe 6.7: Auf einem Tisch liegt ein Holzklotz der Masse 1 kg. Jemand
schießt mit einem Gewehr waagerecht in diesen, wobei die Kugel stecken bleibt.
Sie hat die Masse 1 g. Nach dem Eindringen der Kugel rutscht der Klotz 6 cm
weit. Der Gleitreibungskoeffizient mit der Unterlage beträgt µ = 0, 2. Welche
Geschwindigkeit hatte die Kugel vor dem Eindringen in den Klotz?
Lösung : 486 m/s.
183
Aufgaben zu Kapitel 7
Aufgabe 7.1: (a) Berechnen Sie den auf den Erdmittelpunkt bezogenen
Drehimpuls L eines Satelliten der Masse m, der die Erde auf einer Kreisbahn
mit dem Radius r umläuft! Geben Sie das Ergebnis zunächst allgemein an in
Abhängigkeit von r, m und Me , der Masse der Erde!
(b) Wie groß ist L für einen Satelliten der Masse 100 kg, dessen Bahnradius
gleich dem dreifachen
ist?
√ Erdradius
2
Lösung : (a) L = Gm Me r, (b) 8, 73 1012 Js.
Aufgabe 7.2: Der Halleysche Komet hat eine Periodendauer von 76 Jahren
und hatte im Jahr 1986 auf seiner Bahn den kürzesten Abstand zur Sonne,
befand sich also im Perihel. Der Perihelabstand beträgt 8, 9 1010 m. Die Masse
der Sonne ist 1, 99 1030 kg. Berechnen Sie
(a) die große Halbachse der Ellipsenbahn des Kometen,
(b) den größten Abstand des Kometen von der Sonne, also den Aphelabstand,
(c) die Exzentrizität der Ellipsenbahn!
Lösung : (a) 2, 7 1012 m, (b) 5, 3 1012 m, (c) 0, 97.
Aufgabe 7.3: Welche Geschwindigkeit muß ein Erdsatellit in einer Höhe
von 320 km und in Richtung parallel zur Erdoberfläche haben, damit er im
erdfernsten Punkt seiner elliptischen Bahn die Mondumlaufbahn erreicht? Der
Radius der Mondumlaufbahn beträgt 3, 84 108 m.
Lösung : 10, 8 km/s.
Aufgaben zu Kapitel 8
Aufgabe 8.1: Der Rotor eines Hubschraubers bestehe aus drei Rotorblättern.
Jedes Rotorblatt sei 5, 2 m lang und habe eine Masse von 240 kg. Der Rotor
drehe sich mit 350 Umdrehungen pro min.
(a) Wie groß ist das Trägheitsmoment des gesamten Rotors um die Drehachse?
(Betrachten sie jedes Rotorblatt als dünnen homogenen Stab!)
(b) Welche Energie steckt in der Drehbewegung des Rotors?
Lösung : (a) 6, 49 103 kg m2 , (b) 4, 36 106 J.
Aufgabe 8.2: Ein Radfahrer der Masse 70 kg stellt beim Bergauffahren sein
ganzes Gewicht auf das jeweils sich abwärts bewegende Pedal. Die Pedale beschreiben einen Kreis mit dem Durchmesser 40 cm. Bestimmen Sie das maximale Drehmoment, das der Radfahrer auf diese Weise ausüben kann!
Lösung : 137 Nm.
184
A Aufgaben mit Lösungen
Aufgabe 8.3: Eine Leiter der Masse 20 kg lehnt in einem Winkel von 300 zur
Senkrechten an einer rutschigen, vertikalen Wand. Die Leiter kann wegen der
Bodenhaftreibung nicht abgleiten. Welche Kraft übt die Leiter auf die Wand
aus?
Hinweis: Die Summe aller Drehmomente auf die ruhende Leiter muß verschwinden.
Lösung : 56, 6 N.
Aufgabe 8.4: Ein Motor der konstanten Antriebsleistung P = 2 kW bringt
ein Rad in 15 s auf 4, 78 Umdrehungen pro Sekunde. Wie groß ist das Trägheitsmoment des Rades, wenn 20 % der Leistung durch Reibung verlorengehen?
Lösung : 53, 2 kg m2 .
Aufgabe 8.5: Berechnen Sie das Trägheitsmoment einer homogenen, dünnen
Scheibe bezüglich einer Drehachse, die senkrecht auf der Scheibe steht und
durch ihren Mittelpunkt geht! Die Scheibe habe die Masse m und den Radius r.
Lösung : 12 mr2 .
Aufgabe 8.6: Berechnen Sie das Trägheitsmoment einer homogenen Kugel
bezüglich einer Drehachse, die durch ihren Mittelpunkt geht! Die Kugel habe
die Masse m und den Radius r. Betrachten Sie dazu die Kugel als einen Stapel kreisförmiger Scheiben infinitesimaler Dicke, die geeignete Radien haben!
Lösung : 25 mr2 .
Aufgabe 8.7: Eine Stange der Länge 1 m hat die Masse 4 kg und ist an einem
Ende drehbar aufgehängt. Zu Beginn soll sie senkrecht nach unten hängen. Das
freie Ende wird nun nach oben bewegt, bis die Stange mit der Vertikalen einen
Winkel von 600 bildet. Wieviel Arbeit muß verrichtet werden, um die Stange
in die neue Lage zu bringen?
Lösung : 9, 81 J.
Aufgabe 8.8: Ein 20 cm langer Bleistift, der auf der Spitze steht, kippt um.
Mit welcher Geschwindigkeit prallt das obere Ende des Bleistifts auf die Unterlage, wenn sich die Spitze nicht wegbewegt hat? Betrachten sie den Bleistift
als dünnen, homogenen Stab!
Lösung : 2, 43 m/s.
Aufgabe 8.9: Ein Auto der Masse m1 = 1000 kg fährt mit einer Geschwindigkeit von 18 km/h und läßt sich ausrollen. Der Fahrwiderstandskoeffizient
beträgt µF = 0, 03. Auf die vier Räder entfallen m2 = 60 kg. Die Räder haben
einen Radius von r = 0, 4 m und einen Trägheitsradius von rT = 0, 35 m.
Unter dem Trägheitsradius eines Körpers versteht man den Abstand rT von
der Drehachse, in dem die Masse m des Körpers konzentriert werden kann,
185
ohne daß sich das Trägheitsmoment J ändert, d.h. es gilt J = mrT2 .
(a) Nach welcher Strecke kommt das Auto zum Stillstand?
(b) Welcher Fehler in Prozent ergäbe sich bei Vernachlässigung der Rotationsenergie der Räder?
Lösung : (a) 44, 4 m, (b) 4, 4 %.
Aufgabe 8.10: Eine kleine Kugel der Masse m und mit dem Radius r rollt
reibungsfrei eine schiefe Bahn hinab. Anschließend soll sie einen Looping mit
dem Radius R, R ≫ r, durchlaufen, siehe nachfolgende Abbildung!
(a) Aus welcher Höhe h muß die Kugel mindestens gestartet werden, damit sie
den Looping vollständig durchläuft, ohne aus der Bahn zu fallen?
(b) Aus welcher Höhe h müßte demgegenüber ein reibungsfrei gleitender kleiner
Klotz gestartet werden?
Lösung : (a) 2, 7 R, (b) 2, 5 R.
6
h
v
p
R
?
Aufgabe 8.11: Ein Rad von 18 cm Durchmesser hat ein Trägheitsmoment
von 0, 12 kg m2 . Es wird 1, 5 min lang durch ein konstantes Drehmoment von
0, 75 Nm aus dem Stillstand in Rotation versetzt.
(a) Welche Winkelbeschleunigung erfährt das Rad?
(b) Welche Winkelgeschwindigkeit erreicht es in 1, 5 min?
(c) Welche Bremskraft muß tangential am Radumfang angreifen, damit es in
15 s wieder zum Stehen kommt?
Lösung : (a) 6, 25 s−2 , (b) 562, 5 s−1 , (c) 50 N.
Aufgabe 8.12: Ein Rad hat ein Trägheitsmoment von 2 kg m2 und rotiert
mit einer Umlauffrequenz von 1200 min−1 . An dieses Rad wird nun ein gleiches,
zuvor ruhendes Rad angekuppelt.
(a) Mit welcher Umlauffrequenz rotieren nach dem Ankuppeln beide Räder
weiter?
(b) Welche Energie muß die Kupplung aufnehmen?
Lösung : (a) 600 min−1 , (b) 7 896 J.
186
A Aufgaben mit Lösungen
Aufgabe 8.13: Eine horizontale homogene Scheibe mit einer Masse von
100 kg rotiert mit einer Umlauffrequenz von 10 min−1 um eine vertikale Achse,
die durch den Scheibenmittelpunkt geht. Ein Mensch, der die Masse 60 kg hat
und durch eine Punktmasse angenähert werden kann, steht auf dem Rand der
Scheibe.
(a) Mit welcher Umlauffrequenz rotiert die Scheibe, nachdem der Mensch von
ihrem Rand zur Mitte gegangen ist?
(b) Wie groß ist die kinetische Energie der Anordnung am Anfang, wenn der
Mensch auf dem Rand der Scheibe steht, und wie groß ist sie am Ende, wenn
der Mensch zur Mitte der Scheibe gegangen ist? Der Radius der Scheibe sei
2 m.
(c) Woher kommt die Zunahme der kinetischen Energie?
Lösung : (a) 22 min−1 , (b) 241 J, 531 J.
Aufgaben zu Kapitel 9
Aufgabe 9.1: Eine bestimmte Menge idealen Gases nimmt bei 20 0 C und
einem Druck von 100 kPa ein Volumen von 2, 5 m3 ein.
(a) Wieviel Mole des idealen Gases befinden sich in dem Volumen?
(b) Wenn der Druck auf 300 kPa und die Temperatur auf 30 0 C erhöht wird,
welches Volumen nimmt die Gasmenge dann ein?
Lösung : (a) 102, 6 mol, (b) 0, 862 m3 .
Aufgabe 9.2: Am Boden eines 40 m tiefen Sees entsteht eine Luftblase mit
dem Volumen 20 cm3 . Das Wasser hat dort eine Temperatur von 4 0 C. Die
Blase steigt nun zur Oberfläche, welche eine Temperatur von 20 0 C hat. Auf
welchen Wert wächst das Volumen an, wenn man annimmt, daß die Blase
immer dieselbe Temperatur hat wie das jeweils umgebende Wasser?
Lösung : 103 cm3 .
Aufgabe 9.3: Der Luftdruck im Inneren einer dicht verschlossenen Flasche
beträgt 1, 013 bar bei einer Temperatur von 7 0 C. Beim Erwärmen fliegt der
Korken heraus. Gesucht ist, bis zu welcher Temperatur die Flasche erwärmt
werden muß, wenn der Korken bei einem Luftdruck von 1, 317 bar herausfliegt.
Von einer Volumenänderung der Flasche durch das Erwärmen kann abgesehen
werden.
Lösung : 91 0 C.
Aufgabe 9.4: Um ein Unterseeboot zum Auftauchen zu bringen, bläst man
mittels Druckluft das Wasser aus den Tanks des Schiffes heraus. Dieses An-
187
blasen geschehe in einer Tiefe von 25 m, wobei die Luft die Temperatur des
umgebenden Wassers (277 K) annimmt. Welches Wasservolumen kann man
aus den Tanks herausdrücken, indem man Luft aus einem Ballon von 30 l
Fassungsvermögen abläßt, wenn bei 285 K der Luftdruck im Ballon 147 bar
beträgt? Die Dichte des Meerwassers ist 1, 030 kg/l, und der Luftdruck über
dem Meer beträgt 1, 01325 bar.
Lösung : 1181 l.
Aufgaben zu Kapitel 10
Aufgabe 10.1: Berechnen Sie die mittlere quadratische Geschwindigkeit der
Luftmoleküle bei einer Temperatur von 20 0 C, wenn man die Luft als homogenes Gas mit der Molmasse 29 g/mol ansieht!
Lösung : 502 m/s.
Aufgabe 10.2: Bestimmen Sie die Energie der Wärmebewegung der Moleküle, die sich bei einer Temperatur von 15 0 C in 1 g Luft befinden! Die Luft
ist als homogenes Gas anzusetzen, dessen Molmasse 29 g/mol beträgt.
Lösung : 206 J.
Aufgaben zu Kapitel 11
Aufgabe 11.1: Wieviele kWh sind notwendig, um mit einem elektrischen
Tauchsieder 2 kg Wasser von 20 0 C auf 100 0 C zu erwärmen? Die spezifische
Wärmekapazität von Wasser beträgt 4, 19 J g−1 K−1 .
Lösung : 0, 186 kWh.
Aufgabe 11.2: Ein Kalorimeter der Wärmekapazität 52 J K−1 enthält eine
Wasserfüllung von 182 g bei einer Temperatur von 12, 4 0 C. In das Kalorimeter
wird nun ein Stück Aluminium der Masse 94, 3 g gebracht, welches zuvor in
einem Wasserbad auf 99, 1 0 C erwärmt wurde. Es entsteht eine Endtemperatur
von 20, 5 0 C. Welche spezifische Wärmekapazität hat das Aluminium?
Lösung : 0, 89 J g−1 K−1 .
Aufgabe 11.3: Ein Thermometer der Masse 55 g und der spezifischen
Wärmekapazität 0, 84 J g−1 K−1 zeigt 15 0 C an. Es wird dann in 300 g Wasser
gebracht und zeigt schließlich die Endtemperatur 44, 4 0 C an. Wie hoch war
die Wassertemperatur, bevor das Thermometer ins Wasser gebracht wurde?
Von Wärmeverlusten mit der Umgebung soll abgesehen werden.
188
A Aufgaben mit Lösungen
Lösung : 45, 5 0 C.
Aufgabe 11.4: Ein gut isoliertes Gefäß enthält 130 cm3 heißes Wasser der
Temperatur 80 0 C. In das Wasser wird nun ein Eisklotz der Masse 12 g und
der Temperatur 0 0 C gelegt. Um wieviel Grad fällt die Temperatur des heißen
Wassers, wenn der Eisklotz geschmolzen ist? Die spezifische Schmelzwärme
von Wasser beträgt 333 J/g. Das ist die Wärme, die Eis pro Gramm zugeführt
werden muß, um es zu schmelzen.
Lösung : 13, 5 0 C.
Aufgabe 11.5: Ein großer Wassertank mit einem kreisförmigen Boden von
1, 7 m Durchmesser besteht aus Eisen und hat eine Dicke von 5, 2 mm. Das
Wasser wird nun mit einem Brenner, der unter dem Eisenboden steht, erhitzt,
und zwar so, daß eine Temperaturdifferenz von 2, 3 0 C zwischen den beiden
Seiten der Bodenplatte aufrecht erhalten wird. Wieviel Wärme strömt in 5 min
durch die Bodenplatte zum Wasser? Eisen hat eine Wärmeleitfähigkeit von
67 W K−1 m−1 .
Lösung : 2, 02 107 J.
Aufgabe 11.6: Ein kugelförmiger Tank für flüssige Luft soll so stark isoliert werden, daß in einer Stunde höchstens 0, 5 kg der Füllung verdampfen.
Der Tankdurchmesser beträgt 30 cm, die Temperatur der flüssigen Luft im
Tank −194 0 C und die Verdampfungswärme der flüssigen Luft 197 J/g. Wie
dick muß die Isolierschicht aus Schaumstoff (λ = 0, 04 W K−1 m−1 ) sein, wenn
die Außenseite der Isolierschicht die Temperatur 20 0 C hat? Die Einflüsse der
Tankwand und des Einfüllstutzens sollen vernachlässigt werden.
Lösung : 21, 6 cm.
Aufgaben zu Kapitel 12
Aufgabe 12.1: (a) Ein Liter eines Gases mit dem Adiabatenexponenten
κ = 1, 3 hat eine Temperatur von 273 K und einen Druck von 101, 3 kPa. Es
wird nun plötzlich und damit in guter Näherung adiabatisch auf das halbe
Volumen komprimiert. Wie groß sind Druck und Temperatur am Ende dieses
Vorgangs?
(b) Das Gas wird nun bei konstantem Druck wieder auf 273 K abgekühlt. Wie
groß ist das Volumen am Ende?
Lösung : (a) 249 kPa, 336 K, (b) 0, 41 l.
Aufgabe 12.2: Einem idealen Gas wird eine Wärmemenge von 21 J zugeführt. Als Ergebnis dehnt es sich von 50 cm3 auf 100 cm3 aus. Der Druck
189
bleibt dabei konstant auf 100 kPa.
(a) Wie groß ist die Änderung der inneren Energie des Gases bei diesem Vorgang?
(b) Wie groß ist die molare Wärmekapazität bei konstantem Druck?
(c) Wie groß ist die molare Wärmekapazität bei konstantem Volumen?
Lösung : (a) 16 J, (b) 34, 9 J mol−1 K−1 , (c) 26, 6 J mol−1 K−1 .
Aufgabe 12.3: Berechnen Sie die Arbeit, die ein ideales Gas verrichtet,
wenn es sich von dem Anfangsvolumen V1 auf das Endvolumen V2 adiabatisch
ausdehnt! Der Druck im Anfangszustand sei p1 und der Druck im Endzustand
p2 . Geben Sie die verrichtete Arbeit an in Abhängigkeit von V1 , V2 , p1 und
dem Adiabatenexponenten
κ!
Lösung : ∆W =
p1 V1
κ−1
1−
V1
V2
κ−1
.
Aufgabe 12.4: (a) Eine CARNOT-Maschine arbeitet zwischen einem heißen
Wärmereservoir der Temperatur 320 K und einem kalten Reservoir der Temperatur 260 K. Sie nimmt pro Zyklus 500 J Wärme aus dem heißen Reservoir
auf. Wieviel Arbeit liefert sie pro Zyklus?
(b) Dieselbe Maschine arbeite nun umgekehrt als Kältemaschine zwischen denselben beiden Wärmereservoirs. Wieviel Arbeit muß pro Zyklus zur Verfügung
gestellt werden, um dem kalten Reservoir bei jedem Zyklus 1000 J Wärme zu
entziehen?
Lösung : (a) 94 J, (b) 231 J.
Aufgabe 12.5: Eine CARNOT-Maschine arbeitet mit erhitzter Luft, die
bei einem Anfangsdruck von 7, 1 bar eine Temperatur von 127 0 C hat. Das
Anfangsvolumen der Luft beträgt 2 l. Nach der isothermen Expansion nimmt
sie das Volumen 5 l und nach der anschließenden adiabatischen Expansion das
Volumen 8 l ein. Der Adiabatenexponent der Luft ist κ = 1, 4. Gesucht sind
(a) die Temperatur nach der adiabatischen Ausdehnung,
(b) die pro Zyklus bei 127 0 C aufgenommene Wärme,
(c) der Wirkungsgrad der Maschine in %,
(d) die von der Maschine pro Zyklus abgegebene Arbeit.
Lösung : (a) 58, 4 0 C, (b) 1301 J, (c) 17, 1 %, (d) 223 J.
Aufgabe 12.6: (a) In welchem Verhältnis muß die angesaugte Luft in einem
Dieselmotor mit 2, 5 l Anfangsvolumen adiabatisch komprimiert werden, wenn
sie bei einer Temperatur von 50 0 C und einem Druck von 100 kPa angesaugt
wird und eine Endtemperatur von 650 0 C erreicht werden soll?
(b) Welcher Enddruck entsteht vor dem Einspritzen des Kraftstoffs?
(c) Wie groß ist die erforderliche Kompressionsarbeit, wenn κ = 1, 4 ist?
190
A Aufgaben mit Lösungen
Lösung : (a) 13, 8 : 1, (b) 39, 4 bar, (c) −1160 J.
Aufgabe 12.7: (a) Bei einem OTTOmotor ist folgender Kreisprozeß von
entscheidender Bedeutung:
Schritt I: Adiabatische Expansion von dem Anfangszustand (V1 , p1 , T1 ) auf den
Endzustand (V2 , p2 , T2 ).
Schritt II: Isochore Abkühlung von dem Anfangszustand (V2 , p2 , T2 ) auf den
Endzustand (V2 , p3 , T3 ).
Schritt III: Adiabatische Kompression von dem Anfangszustand (V2 , p3 , T3 ) auf
den Endzustand (V1 , p4 , T4 ).
Schritt IV: Isochore Erwärmung von dem Anfangszustand (V1 , p4 , T4 ) auf den
Endzustand (V1 , p1 , T1 ).
Fertigen Sie eine Skizze dieses Kreisprozesses im V, p-Diagramm an! Berechnen
Sie den Wirkunsgrad η dieses Kreisprozesse! Der Wirkungsgrad ist dabei wie
üblich definiert durch η = ∆W/∆Qauf . Hierbei ist ∆W die bei einem Durchlauf
des Kreisprozesses verrichtete Arbeit und ∆Qauf die bei einem Durchlauf des
Kreisprozesses aufgenommene Wärmemenge.
Hinweis: Benutzen Sie das Ergebnis von Aufgabe 12.3!
(b) Wie groß ist der theoretische Wirkungsgrad eines OTTO-Motors mit einem
Kompressionsverhältnis von 8 : 1? Das Arbeitsgas ist ein Benzin-Luft-Gemisch,
so daß von κ = 1, 4 ausgangen
werden kann.
κ−1
V1
, (b) 0, 56.
Lösung : (a) η = 1 − V2
Aufgaben zu Kapitel 13
Aufgabe 13.1: Ein ideales Gas führt eine isotherme Expansion aus bei einer
Temperatur von 132 0 C. Es nimmt dabei die Wärme 16 kJ auf. Wie groß ist
die Änderung der Entropie?
Lösung : 39, 5 J/K.
Aufgabe 13.2: Ein Eisklotz der Masse 8 g und der Temperatur −10 0 C wird
in eine Thermosflasche geworfen, die 100 cm3 Wasser der Temperatur 20 0 C
enthält. Wie groß ist die Änderung der Entropie, wenn der thermische Gleichgewichtszustand erreicht ist? Die spezifische Schmelzwärme von Wasser beträgt
333 J/g. Die spezifische Wärmekapazität von Eis beträgt 2, 1 J g−1 K−1 .
Lösung : 0, 64 J/K.
Anhang B
Vektoren
Zur Beschreibung der Bewegung eines Teilchens im dreidimensionalen Raum
braucht man den Begriff des Vektors . Aber auch zahlreiche andere physikalische Größen wie Impuls, Kraft, Drehimpuls, Drehmoment, elektrische und magnetische Feldstärke sind Vektoren. Charakteristisch für eine vektorielle Größe
ist, daß sie einen Betrag und eine Richtung hat. In den folgenden Abschnitten
wird zunächst der Begriff des Vektors definiert, und dann werden die wichtigsten Rechenregeln für Vektoren zusammengestellt.
B.1
Definition von Vektoren
Wir wollen folgende Definition für den Begriff Vektor verwenden:
Definition B.1 Ein Vektor ist eine gerichtete Verbindung zwischen zwei
Punkten im Raum. Dabei werden alle Vektoren, die sich durch Parallelverschiebung ineinander überführen lassen, als identisch angesehen. Vektoren werden
durch Pfeile dargestellt.
~
a
−~
a
~
a
191
192
B Vektoren
Den zu dem Vektor ~a gleich langen, aber entgegengesetzt gerichteten Vektor
bezeichnen wir mit −~a.
Der Nullvektor entsteht durch die Verbindung eines Punktes mit sich selbst.
Er hat somit keine Richtung und die Länge Null und wird mit ~0 bezeichnet.
B.2
Addition von Vektoren
Definition B.2 Gegeben seien zwei Vektoren ~a und ~b. Verschiebt man den
Vektor ~b so, daß sein Anfang mit dem Ende des Vektors ~a zusammenfällt, so
nennt man den Vektor ~c, dessen Anfang mit demjenigen von ~a und dessen
Ende mit demjenigen von ~b zusammenfällt, Summe der Vektoren ~a und ~b und
schreibt
~c = ~a + ~b .
HH ~
b
HH
H
j
H
1
~
a
H
a + ~b
~
HH
HH
~b
H
~
a
HH
j
Mit dieser Definition ergeben sich sofort folgende Rechenregeln für die Vektoraddition:
~a + ~0 = ~a ,
~a + (−~a) = ~0 ,
~a + ~b = ~b + ~a
~a + (~b + ~c) = (~a + ~b) + ~c
(Kommutativgesetz) ,
(Assoziativgesetz) .
Die Subtraktion zweier Vektoren ist definiert durch
~a − ~b := ~a + (−~b) .
193
B.3
Multiplikation eines Vektors mit einem
Skalar
Definition B.3 Zu einer reellen Zahl α ≥ 0 und einem Vektor ~a bezeichnet
α~a denjenigen Vektor, der dieselbe Richtung hat wie ~a, aber die α-fache Länge.
Im Fall α < 0 setzt man α~a := −(| α | ~a).
1, 5 ~
a
~
a
−2 ~
a
Für die Multiplikation eines Vektors mit einem Skalar gelten die folgenden
Rechenregeln mit α, β ∈ R und beliebigen Vektoren ~a, ~b :
α(β~a) = (αβ)~a ,
α(~a + ~b) = α~a + α~b ,
(α + β)~a = α~a + β~a .
Die Länge eines Vektors ~a nennt man seinen Betrag und schreibt dafür | ~a |
oder auch kurz a. Aus dieser Definition folgt
| α~a |=| α || ~a | .
Ein Vektor vom Betrag 1 heißt Einheitsvektor. Zu jedem Vektor ~a 6= ~0 ist
ˆ := 1 ~a
~a
| ~a |
der Einheitsvektor in Richtung von ~a.
B.4
Vektoren im Koordinatensystem
Wir legen in dem dreidimensionalen Raum ein kartesisches Koordinatensystem
mit dem Ursprung O fest. Dieses besteht aus drei zueinander senkrechten Achsen (der x-, y- und z- Achse) derart, daß die drei Achsen ein Rechtssystem
194
B Vektoren
bilden. Ein solches Koordinatensystem ist in nachfolgender Abb. dargestellt.
Dadurch sind gleichzeitig drei ausgezeichnete Vektoren gegeben, nämlich die
Einheitsvektoren ~ex , ~ey , ~ez in Richtung der positiven x-, y-, bzw. z- Achse.
z
z
6
6a ~
z ez
~
ez 6
~
ex
/
6
-
1
~
a
-
y
~
ey
/
x
x/
ex
ax ~
/
ay ~
ey
-
-
y
Aus obiger Abb. kann man entnehmen, daß jeder Vektor ~a eindeutig zerlegbar ist als Summe
~a = ax~ex + ay~ey + az~ez
oder kurz in Spaltenvektorschreibweise
ax
~a =
ay .
az
Die Werte ax , ay , az werden als Komponenten des Vektors ~a bezeichnet. Sie
ergeben sich durch senkrechte Projektion des Vektors ~a auf die einzelnen Koordinatenachsen.
Durch zweimalige Anwendung des Satzes von Pythagoras ergibt sich aus
obiger Abb. folgender Ausdruck für den Betrag eines Vektors
| ~a |=
q
a2x + a2y + a2z .
Für die Addition zweier Vektoren ~a, ~b ergibt sich in Komponentendarstellung unter Benutzung obiger Regeln
~a + ~b = (ax~ex + ay~ey + az~ez ) + (bx~ex + by~ey + bz~ez )
= (ax + bx )~ex + (ay + by )~ey + (az + bz )~ez ,
also
ax
bx
ax + b x
ay + b y = ay + b y .
az
bz
az + b z
195
Für die Multiplikation eines Vektors ~a mit einem Skalar α ergibt sich in
Komponentendarstellung unter Benutzung obiger Rechenregeln
α~a = α(ax~ex + ay~ey + az~ez )
= αax~ex + αay~ey + αaz ~ez ,
also
B.5
αax
ax
α ay = αay
.
αaz
az
Das Skalarprodukt
Definition B.4 Zu zwei gegebenen Vektoren ~a, ~b ist das Skalarprodukt ~a ~b
definiert durch
~a ~b :=| ~a || ~b | cos ϕ .
Dabei ist ϕ der von den beiden Vektoren eingeschlossene Winkel.
~b ϕ
3
-
~
a
Das Skalarprodukt ist also eine Verknüpfung zweier Vektoren, die als Ergebnis eine reelle Zahl, einen Skalar, liefert.
Für die Einheitsvektoren eines kartesischen Koordinatensystems ergibt sich
sofort
~ex ~ex = ~ey ~ey = ~ez ~ez = 1 ,
~ex ~ey = ~ex ~ez = ~ey ~ez = 0 .
(B.1)
(B.2)
Nachfolgend sind die Rechenregeln für das Skalarprodukt zusammengestellt:
~a ~b = ~b ~a
(Kommutativgesetz) ,
(~a + ~b)~c = ~a ~c + ~b ~c
(Distributivgesetz) ,
~
~
(α~a)b = ~a(αb) = α(~a ~b) ,
√
~a ~a .
| ~a | =
196
B Vektoren
Außerdem gilt für zwei Vektoren ~a 6= ~0 und ~b 6= ~0
~a ~b = 0 ⇐⇒ ~a und ~b sind orthogonal .
Die Komponentendarstellung von Vektoren ermöglicht eine einfache Berechnung des Skalarproduktes zweier Vektoren ~a, ~b. Unter Benutzung obiger Rechenegeln und der Gl. (B.1) ff. ergibt sich
~a ~b = (ax~ex + ay~ey + az~ez ) (bx~ex + by~ey + bz~ez )
= ax b x + ay b y + az b z .
B.6
Das Vektorprodukt
Definition B.5 Das Vektorprodukt zweier Vektoren ~a, ~b ist derjenige Vektor
~c := ~a × ~b, der die folgenden Eigenschaften hat:
1. Der Betrag von ~c ist gegeben durch | ~c |:=| ~a || ~b | sin ϕ, wobei ϕ der von
den Vektoren ~a und ~b eingeschlossene Winkel ist.
2. ~c steht senkrecht auf der von ~a und ~b aufgespannten Ebene.
3. Die Vektoren ~a, ~b, ~c bilden in genau dieser Reihenfolge ein Rechtssystem.
c=~
a × ~b
6~
~b
-
~
a
Für die Einheitsvektoren eines kartesischen Koordinatensystems ergibt sich
sofort
~ex × ~ex = ~ey × ~ey = ~ez × ~ez = ~0 ,
~ex × ~ey = ~ez = − (~ey × ~ex ) ,
~ey × ~ez = ~ex = − (~ez × ~ey ) ,
~ez × ~ex = ~ey = − (~ex × ~ez ) .
(B.3)
(B.4)
(B.5)
(B.6)
197
Für das Vektorprodukt gelten die folgenden Rechenregeln:
~a × ~b = − (~b × ~a)
(Antikommutativgesetz) ,
(~a + ~b) × ~c = ~a × ~c + ~b × ~c
(Distributivgesetz) ,
(α~a) × ~b = ~a × (α~b) = α(~a × ~b) .
Man beachte, daß das Vektorprodukt nicht assoziativ ist; d.h. im allgemeinen gilt ~a × (~b × ~c) 6= (~a × ~b) × ~c.
Außerdem gilt für zwei Vektoren ~a 6= ~0 und ~b 6= ~0
~a × ~b = ~0 ⇐⇒ ~a und ~b sind parallel .
Mittels der Komponentendarstellung läßt sich das Vektorprodukt zweier
Vektoren ~a, ~b wie folgt berechnen. Unter Benutzung obiger Rechenregeln und
der Gl. (B.3) ff. ergibt sich
~a × ~b = (ax~ex + ay~ey + az~ez ) × (bx~ex + by~ey + bz~ez )
= (ay bz − az by )~ex + (az bx − ax bz )~ey + (ax by − ay bx )~ez
oder
~ex ~ey ~ez
~a × ~b = det
ax ay az .
bx by bz
Hierbei bezeichnet det die Determinante der nachfolgenden Matrix.
B.7
Mehrfachprodukte
Gelegentlich treten auch Mehrfachprodukte von Vektoren auf. Wir betrachten
zunächst das Spatprodukt.
Definition B.6 Das Spatprodukt dreier Vektoren ~a, ~b, ~c ist definiert als
[ ~a, ~b, ~c ] := ~a (~b × ~c) .
Der Betrag des Spatproduktes gibt das Volumen des von den Vektoren ~a, ~b, ~c
aufgespannten Spates oder Parallelepipeds an.
Benutzt man für die Vektoren ~a, ~b, ~c die Komponentendarstellung, so ergibt
sich für das Spatprodukt
ax ay az
~
[ ~a, b, ~c ] = det bx by bz
.
cx cy cz
198
B Vektoren
Das Spatprodukt läßt sich also mittels einer dreireihigen Determinante berechnen.
Weiter gelten noch folgende Regeln für Mehrfachprodukte:
~a × (~b × ~c) = (~a ~c)~b − (~a ~b)~c ,
~ = (~a ~c)(~b d)
~ − (~a d)(
~ ~b ~c) ,
(~a × ~b) (~c × d)
(~a × ~b)2 = (~a ~a)(~b ~b) − (~a ~b)2 .
(B.7)
(B.8)
(B.9)
Anhang C
Literaturverzeichnis
H. Lindner Physik für Ingenieure. Vieweg Verlag, Braunschweig Wiesbaden.
P. Dobrinski, G. Krakau, A. Vogel Physik für Ingenieure. Teubner Verlag, Stuttgart.
M. Alonso, E. D. Finn Physik. Addison-Wesley Verlag, Bonn.
D. Halliday, R. Resnick Fundamantals of Physics. John Wiley & Sons Verlag, New York.
Ch. Kittel, W. D. Knight, et al. Berkeley Physik Kurs, Band 1 Mechanik. Vieweg Verlag, Braunschweig Wiesbaden.
J. Orear Physik. Hanser Verlag, München Wien.
C. Gerthsen, H. O. Kneser, H. Vogel Physik. Springer Verlag, Berlin.
H. Kuchling Taschenbuch der Physik. Fachbuchverlag Leipzig.
199
200
Anhang D
Physikalische Konstanten
Lichtgeschwindigkeit
Gravitationskonstante
BOLTZMANN-Konstante
c
G
k
AVOGADRO-Konstante
Universelle Gaskonstante
Atomare Masseneinheit
Magnetische Feldkonstante
Elektrische Feldkonstante
PLANCK-Konstante
NA
R
u
µ0
ε0
h
Elementarladung
Ruhemasse des Elektrons
Ruhemasse des Protons
Ruhemasse des Neutrons
BOHRscher Radius
BOHRsches Magneton
RYDBERG-Konstante
STEFAN-BOLTZMANN-Konst.
e
me
mp
mn
rB
µB
R∞
σ
299 792 458 m s−1
6, 67259(85) 10−11 N m2 kg−2
1, 380658(12) 10−23 J K−1
8, 617385(73) 10−5 eV K−1
6, 0221367(36) 1023 mol−1
8, 314510(70) J mol−1 K−1
1, 6605402(10) 10−27 kg
4π 10−7 H m−1
8, 854187817 . . . 10−12 F m−1
6, 6260755(40) 10−34 J s
4, 1356692(12) 10−15 eV s
1, 60217733(49) 10−19 C
9, 1093897(54) 10−31 kg
1, 6726231(10) 10−27 kg
1, 6749286(10) 10−27 kg
0, 529177249(24) 10−10 m
9, 2740154(31) 10−24 J T−1
1, 0973731534(13) 107 m−1
5, 67051(19) 10−8 W m−2 K−4
Die in den Klammern angegebenen Ziffern bedeuten die Standardabweichung (mittlerer quadratischer Fehler), angegeben in Ziffern der letzten Stelle,
Beispiel: 6, 67259(85) = 6, 67259 ± 0, 00085.
201
202
Anhang E
Das Griechische Alphabet
Für zahlreiche physikalische Größen werden Buchstaben des griechischen Alphabets verwendet. Es ist deshalb nachfolgend aufgeführt.
Name
groß klein
Alpha
A
α
Beta
B
β
Gamma
Γ
γ
Delta
∆
δ
Epsilon
E
ǫ, ε
Zeta
Z
ζ
Eta
H
η
Theta
Θ
θ, ϑ
Iota
I
ι
Kappa
K
κ
Lambda
Λ
λ
Mü
M
µ
Name
groß klein
Nü
N
ν
Xi
Ξ
ξ
Omikron
O
o
Pi
Π
π
Rho
P
ρ, ̺
Sigma
Σ
σ
Tau
T
τ
Ypsilon
Υ
υ
Phi
Φ
φ, ϕ
Chi
X
χ
Psi
Ψ
ψ
Omega
Ω
ω
203