Theoretische Physik I (Stand 24.07.05, PDF)
Werbung
")
Theoretische Physik I
für Lehramtsstudiengänge mit Fach Physik
und Diplomstudiengänge mit Nebenfach Physik
- Skriptum zur Vorlesung Prof. Dr. H.-J. Kull
Fraunhofer Institut für Lasertechnik
und
Lehr- und Forschungsgebiet Laserphysik
Institut für Theoretische Physik A
Rheinisch-Westfälische Technische Hochschule
Aachen
28. Juli 2005
Inhaltsverzeichnis
1 Newtonsche Mechanik
1.1
1.2
1.3
1.4
1.5
1
Bewegung von Massenpunkten . . . . . . . . . . . . . . . . . . . . . .
1
1.1.1
Euklidischer Raum . . . . . . . . . . . . . . . . . . . . . . . .
2
1.1.2
Massenpunkt . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.1.3
Kartesisches Koordinatensystem . . . . . . . . . . . . . . . . .
2
1.1.4
Ortsvektor . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.1.5
Zeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.1.6
Bewegung . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
Newtonsche Gesetze . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.2.1
Axiom 1: Trägheitssatz . . . . . . . . . . . . . . . . . . . . . .
5
1.2.2
Axiom 2: Impulssatz . . . . . . . . . . . . . . . . . . . . . . .
6
1.2.3
Axiom 3: actio=reactio . . . . . . . . . . . . . . . . . . . . . .
8
Vektoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.1
Vektor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.2
Skalarprodukt . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.3
Vektorprodukt
1.3.4
Vektordifferentiation . . . . . . . . . . . . . . . . . . . . . . . 14
1.3.5
Vektordifferentialoperatoren . . . . . . . . . . . . . . . . . . . 14
. . . . . . . . . . . . . . . . . . . . . . . . . . 12
Erhaltungssätze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.4.1
Impulssatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.4.2
Drehimpulssatz . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.4.3
Energiesatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Eindimensionale Bewegungen . . . . . . . . . . . . . . . . . . . . . . 20
1.5.1
Zeitabhängige Kraft . . . . . . . . . . . . . . . . . . . . . . . 21
iii
Theoretische Physik I, SS 05, H.-J. Kull
1.6
1.7
1.8
1.5.2
Geschwindigkeitsabhängige Kraft . . . . . . . . . . . . . . . . 21
1.5.3
Ortsabhängige Kraft . . . . . . . . . . . . . . . . . . . . . . . 21
Bewegung im Zentralpotential . . . . . . . . . . . . . . . . . . . . . . 25
1.6.1
Zentralpotential und Zentralkraft . . . . . . . . . . . . . . . . 25
1.6.2
Drehimpulserhaltung . . . . . . . . . . . . . . . . . . . . . . . 26
1.6.3
Energieerhaltung . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.6.4
Bewegung und Bahnkurve . . . . . . . . . . . . . . . . . . . . 28
1.6.5
Radialbewegung im effektiven Potential . . . . . . . . . . . . . 29
1.6.6
Winkelbewegung um das Kraftzentrum . . . . . . . . . . . . . 30
Kepler-Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
1.7.1
Keplersche Gesetze . . . . . . . . . . . . . . . . . . . . . . . . 31
1.7.2
Bahnkurven . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
1.7.3
Ellipsenbahnen . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1.7.4
Coulomb-Streuung . . . . . . . . . . . . . . . . . . . . . . . . 36
1.7.5
Stoßgeschwindigkeit und Stoßparameter
1.7.6
Ablenkwinkel . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
1.7.7
Wirkungsquerschnitt . . . . . . . . . . . . . . . . . . . . . . . 38
1.7.8
Streuung an harten Kugeln
1.7.9
Rutherfordscher Wirkungsquerschnitt . . . . . . . . . . . . . . 41
2.2
. . . . . . . . . . . . 36
. . . . . . . . . . . . . . . . . . . 40
Zweikörperproblem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
1.8.1
Schwerpunkts- und Relativkoordinaten . . . . . . . . . . . . . 42
1.8.2
Schwerpunkts- und Relativbewegung . . . . . . . . . . . . . . 43
1.8.3
Elastische Stöße . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2 Lagrangesche Mechanik
2.1
iv
46
Systeme mit Zwangsbedingungen . . . . . . . . . . . . . . . . . . . . 46
2.1.1
Zwangsbedingungen
. . . . . . . . . . . . . . . . . . . . . . . 46
2.1.2
Zwangskräfte . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Lagrangegleichungen erster Art . . . . . . . . . . . . . . . . . . . . . 49
2.2.1
Konfigurationsraum . . . . . . . . . . . . . . . . . . . . . . . . 49
2.2.2
Holonome Zwangsbedingungen . . . . . . . . . . . . . . . . . . 50
2.2.3
D’Alembertsches Prinzip . . . . . . . . . . . . . . . . . . . . . 51
2.2.4
Bewegungsgleichungen mit Zwangskräften . . . . . . . . . . . 52
Theoretische Physik I, SS 05, H.-J. Kull
2.3
Lagrangegleichungen zweiter Art
v
. . . . . . . . . . . . . . . . . . . . 53
2.3.1
Generalisierte Koordinaten . . . . . . . . . . . . . . . . . . . . 53
2.3.2
D’Alembertsches Prinzip in generalisierten Koordinaten . . . . 53
2.3.3
Generalisierte Geschwindigkeiten . . . . . . . . . . . . . . . . 54
2.3.4
Generalisierte Kraft . . . . . . . . . . . . . . . . . . . . . . . . 55
2.3.5
Generalisiertes Potential . . . . . . . . . . . . . . . . . . . . . 55
2.3.6
Lagrangegleichungen zweiter Art . . . . . . . . . . . . . . . . 56
2.3.7
Lösungsverfahren . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.3.8
Massenpunkt auf schiefer Ebene . . . . . . . . . . . . . . . . . 57
2.3.9
Zyklische Koordinaten und generalisierte Impulse . . . . . . . 58
2.3.10 Energieerhaltung . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.4
2.5
2.6
Schwingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.4.1
Mathematisches Pendel . . . . . . . . . . . . . . . . . . . . . . 60
2.4.2
Harmonischer Oszillator . . . . . . . . . . . . . . . . . . . . . 63
2.4.3
Schwingungen mit kleinen Amplituden . . . . . . . . . . . . . 65
2.4.4
Entwicklung um die Gleichgewichtslage . . . . . . . . . . . . . 65
2.4.5
Schwingungsgleichung . . . . . . . . . . . . . . . . . . . . . . 67
2.4.6
Gekoppelte Pendel . . . . . . . . . . . . . . . . . . . . . . . . 69
Orthogonale Transformationen, Drehungen und Spiegelungen . . . . . 71
2.5.1
Basistransformationen . . . . . . . . . . . . . . . . . . . . . . 71
2.5.2
Aktive und passive Drehungen . . . . . . . . . . . . . . . . . . 73
2.5.3
Endliche Drehungen . . . . . . . . . . . . . . . . . . . . . . . 75
2.5.4
Eulersche Winkel . . . . . . . . . . . . . . . . . . . . . . . . . 77
2.5.5
Infinitesimale Drehungen . . . . . . . . . . . . . . . . . . . . . 77
2.5.6
Rotierende Bezugssysteme . . . . . . . . . . . . . . . . . . . . 79
Starrer Körper
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
2.6.1
Freiheitsgrade . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
2.6.2
Winkelgeschwindigkeit . . . . . . . . . . . . . . . . . . . . . . 82
2.6.3
Trägheitstensor . . . . . . . . . . . . . . . . . . . . . . . . . . 83
2.6.4
Eulersche Kreiselgleichungen . . . . . . . . . . . . . . . . . . . 86
2.6.5
Kräftefreie Bewegung . . . . . . . . . . . . . . . . . . . . . . . 87
2.6.6
Schwerer symmetrischer Kreisel . . . . . . . . . . . . . . . . . 89
Theoretische Physik I, SS 05, H.-J. Kull
vi
3 Thermodynamik
92
3.1
Thermodynamische Systeme . . . . . . . . . . . . . . . . . . . . . . . 92
3.2
Erster Hauptsatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
3.3
3.4
3.2.1
Spezifische Wärme . . . . . . . . . . . . . . . . . . . . . . . . 96
3.2.2
Ideale Gase . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Zweiter Hauptsatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
3.3.1
Postulat von Kelvin . . . . . . . . . . . . . . . . . . . . . . . . 99
3.3.2
Postulat von Clausius
. . . . . . . . . . . . . . . . . . . . . . 99
Thermodynamischer Wirkungsgrad . . . . . . . . . . . . . . . . . . . 99
3.4.1
Carnot-Prozess . . . . . . . . . . . . . . . . . . . . . . . . . . 100
3.4.2
Äquivalenz der Aussagen von Kelvin und Clausius . . . . . . . 101
3.4.3
Carnot-Theorem . . . . . . . . . . . . . . . . . . . . . . . . . 101
3.5
Thermodynamische Temperaturdefinition . . . . . . . . . . . . . . . . 104
3.6
Entropie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
3.6.1
Beliebige Kreisprozesse . . . . . . . . . . . . . . . . . . . . . . 104
3.6.2
Eigenschaften der Entropie . . . . . . . . . . . . . . . . . . . . 107
3.6.3
Gleichgewicht bei Wärmeaustausch . . . . . . . . . . . . . . . 109
3.6.4
Gleichgewicht bei Teilchenaustausch
3.6.5
Chemische Gleichgewichte . . . . . . . . . . . . . . . . . . . . 111
3.6.6
Clausius-Clapeyron-Gleichung . . . . . . . . . . . . . . . . . . 112
4 Relativistische Mechanik
. . . . . . . . . . . . . . 110
113
4.1
Relativitätsprinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
4.2
Lorentz-Transformation . . . . . . . . . . . . . . . . . . . . . . . . . . 114
4.3
Der Abstand von Ereignissen
4.4
. . . . . . . . . . . . . . . . . . . . . . 116
4.3.1
Raumzeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
4.3.2
Längenkontraktion . . . . . . . . . . . . . . . . . . . . . . . . 118
4.3.3
Zeitdilatation . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
4.3.4
Eigenzeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
4.3.5
Gleichzeitigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . 120
4.3.6
Additionstheorem der Geschwindigkeiten . . . . . . . . . . . . 121
Minkowski-Raum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
4.4.1
Lorentz-Minkowski-Metrik . . . . . . . . . . . . . . . . . . . . 122
Theoretische Physik I, SS 05, H.-J. Kull
4.5
vii
4.4.2
Lorentz-Poincaré-Gruppe . . . . . . . . . . . . . . . . . . . . . 123
4.4.3
Vierer-Vektoren und Lorentz-Skalare . . . . . . . . . . . . . . 125
Relativistische Mechanik . . . . . . . . . . . . . . . . . . . . . . . . . 127
4.5.1
Kovarianz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
4.5.2
Kovariante Bewegungsgleichung . . . . . . . . . . . . . . . . . 127
Kapitel 1
Newtonsche Mechanik
1.1
Bewegung von Massenpunkten
Die Theoretische Physik beschreibt physikalische Beobachtungen durch mathematische Modelle. Das mathematische Modell stellt eine Idealisierung dar, die i.a. nur
innerhalb eines gewissen Gültigkeitsbereichs anwendbar ist. Im Rahmen des mathematischen Modells sind exakte Vorhersagen möglich.
Zwischen den physikalisch beobachtbaren Größen und den mathematisch definierten
Größen gibt es eine eindeutige Zuordnung, die einen Vergleich der Theorie mit dem
Experiment erlaubt. In der klassischen Mechanik wird die Lage eines physikalischen
Körpers im Raum durch den Ortsvektor eines Massenpunktes in einem euklidischen
Raum definiert. Zwischen Beobachtung und mathematischem Modell besteht hier
also die Zuordnung:
physikalische Observable
Raum
Körper
Lage
mathematische Größe
←→
←→
←→
1
euklidischer Raum
Massenpunkt
Ortsvektor
Theoretische Physik I, SS 05, H.-J. Kull
1.1.1
2
Euklidischer Raum
Ein euklidischer Raum ist ein Raum in dem die euklidische Geometrie gültig ist.
Insbesondere ist die Summe der Innenwinkel im Dreieck gleich 180o . Man bezeichnet
euklidische Räume als flach, nichteuklidische Räume als gekrümmt. Die Oberfläche
einer Kugel ist z.B. ein zweidimensionaler nichteuklidischer Raum.
Der dreidimensionale physikalische Raum ist in guter Näherung euklidisch. Dies wurde zuerst von dem Mathematiker Gauß überprüft, der die Winkelsumme eines von
drei Bergspitzen gebildeten Dreiecks (Inselsberg, Brocken, Hoher Hagen) vermessen
lies. Nach der Einsteinschen Gravitationstheorie krümmen Massen den Raum. Dies
hat z.B. den Effekt, dass Lichtstrahlen von der Sonne um wenige Bogensekunden
von ihrer geradlinigen Ausbreitung abgelenkt werden.
1.1.2
Massenpunkt
Ein Massenpunkt bezeichnet einen Körper mit der Masse m, dessen Lage durch einen
einzigen Punkt repräsentiert wird. Größe, Form, Drehungen und Deformationen des
Körpers werden bei dieser Idealisierung vernachlässigt (Abb.1.1). Der Gültigkeitsbereich der Punktmechanik wird im Rahmen der Mechanik starrer Körper und der
Kontinuumsmechanik auf ausgedehnte Körper erweitert.
m
Abbildung 1.1: Ausgedehnter
Körper und Massenpunkt.
m
1.1.3
Kartesisches Koordinatensystem
Der Ort eines Körpers läßt sich nur relativ zu einem Bezugssystem angeben. Im euklidischen Raum kann als Bezugssystem ein kartesisches Koordinatensystem gewählt
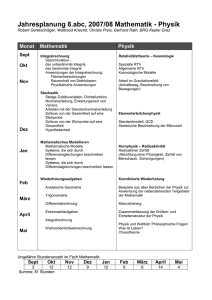
werden. Ein kartesisches Koordinatensystem wird durch drei orthogonale Koordinatenachsen mit einem gemeinsamen Schnittpunkt O(0|0|0) gebildet. Die Koordinatenachsen (x,y,z) bzw. (x1 ,x2 ,x3 ) bilden ein Rechtssystem (Abb.1.5). Ein Punkt P wird
Theoretische Physik I, SS 05, H.-J. Kull
3
durch die Angabe seiner kartesischen Koordinaten xP , yP , zP eindeutig bestimmt
und mit P(xP |yP |zP ) bezeichnet.
z
y
ez
ey
ex
x
Abbildung 1.2: Kartesisches
Koordinatensystem.
Werden
die Finger der rechten Hand
von der x-Achse zur y-Achse
gedreht (Pfeilrichtung), so zeigt
der Daumen in Richtung der
z-Achse.
Einheitsvektoren (ex , ey , ez ) bzw. (e1 , e2 , e3 ) entlang der Koordinatenachsen bilden
eine kartesische Basis. Man verwendet hierfür auch die Spaltenvektoren
1
0
0
e1 = 0 , e2 = 1 , e3 = 0 .
(1.1)
0
0
1
1.1.4
Ortsvektor
Der Ortsvektor r eines Punktes kann als Linearkombination der Basisvektoren angegeben werden
3
X
r = xex + yey + zez =
xi ei
(1.2)
i=1
Die Komponenten des Ortsvektors bezüglich einer kartesischen Basis lassen sich zu
einem Spaltenvektor zusammenfassen,
1
0
0
x
0
y .
r=x 0
+y 1
+z
=
(1.3)
0
0
1
z
1.1.5
Zeit
Zeitintervalle können durch periodische Vorgänge gemessen werden. Je nach Genauigkeit kann man als Uhr z.B. den Pulsschlag, die Erdrotation oder eine Atomfrequenz
benutzen. Die Zeit wird entlang einer weiteren in gleiche Intervalle unterteilten Koordinatenachse t angegeben.
Theoretische Physik I, SS 05, H.-J. Kull
1.1.6
4
Bewegung
Die Bewegung eines Massenpunktes wird durch eine Abbildung t −→ r(t) dargestellt. Das Bild der Abbildung ist die Bahnkurve.
r(t)
Abbildung 1.3: Bahnkurve eines Massenpunktes
Die Abbildung besitzt folgende Eigenschaften:
• Eindeutigkeit: Ein Massenpunkt befindet sich zu einer Zeit t an genau einem
Ort r(t).
• Stetigkeit: Die Stetigkeit der Bahn entspricht der Erfahrungstatsache, dass
in der Natur keine Sprünge auftreten (Natura non facit saltus).
• Differenzierbarkeit: Die ersten beiden Ableitungen der Funktion r(t) definieren die Geschwindigkeit und Beschleunigung des Massenpunktes. Zeitableitungen werden durch einen Punkt gekennzeichnet.
r(t + ) − r(t)
dr
= lim
,
→0
dt
dv
v(t + ) − v(t)
a(t) = v̇ =
= lim
.
→0
dt
v(t) = ṙ =
Theoretische Physik I, SS 05, H.-J. Kull
5
dv
v(t)
dr
r(t+dt)
v(t+dt)
r(t)
Abbildung 1.4: Änderungen des Ortsvektors und des Geschwindigkeitsvektors
1.2
Newtonsche Gesetze
Die Mechanik beschreibt die Bewegung von Massenpunkten unter der Einwirkung
von Kräften. Eine Kraft besitzt Betrag und Richtung und wird daher durch einen
Vektor F dargestellt. Die Grundgesetze der Mechanik werden durch die Newtonschen Axiome definiert.
1.2.1
Axiom 1: Trägheitssatz
Ein Körper, auf den keine Kräfte einwirken (F = 0) befindet sich entweder in
Ruhe (v = 0) oder er bewegt sich geradlinig und mit konstanter Geschwindigkeit
(v = const 6= 0):
F =0
=⇒
v = const
(1.4)
• Die Aussage ist bezugssystemabhängig. Sie gilt nicht in beschleunigten Bezugssystemen (Karusell).
• Ein Bezugssystem in dem das erste Axiom gültig ist, wird als Inertialsystem
bezeichnet. Inertialsysteme werden je nach Genauigkeit durch ein Labor, die
Erde, oder den Fixsternhimmel realisiert.
• Es gilt das Galileische Relativitätsprinzip: Ein Bezugsssystem, das sich relativ zu einem Inertialsystem mit konstanter Geschwindigkeit bewegt, ist selbst
Theoretische Physik I, SS 05, H.-J. Kull
6
wieder ein Inertialsystem. Daher gibt es unendlich viele unterschiedliche Inertialsysteme. Alle Inertialsysteme sind gleichwertig.
1.2.2
Axiom 2: Impulssatz
Eine Masse m, die sich mit der Geschwindigkeit v bewegt, besitzt den Impuls p =
mv. Das wichtigste Grundgesetz der Mechanik besteht in der Aussage, dass zur
zeitlichen Änderung des Impulses eine äußere Einwirkung in Form einer Kraft F
notwendig ist:
dp
= F.
dt
(1.5)
Bei konstanter Masse gilt das Beschleunigungsgesetz
ma = F ,
a = v̇ = r̈.
(1.6)
Der Impulssatz wird auch Newtonsche Grundgleichung der Mechanik oder Newtonsche Bewegungsgleichung genannt. Er ist gleichzeitig Definition der Masse, Definition
der Kraft und ein deterministisches Bewegungsgesetz.
Definition der Masse: Es gibt verschiedene Möglichkeiten mit Axiom 2 die Masse
zu definieren.
(i) Läßt man auf zwei verschiedene Massen m1 und m2 dieselbe Kraft F1 = F2
einwirken, so gilt
m1 a1 = m2 a2
Wählt man m1 als Masseneinheit, so kann m2 durch Beschleunigungsmessungen
bestimmt werden.
(ii) Beim Stoß zweier Massen wirken entgegengesetzt gleiche Kräfte: F1 = −F2 , d.h.
m1 v̇1 + m2 v̇2 = 0,
m1 v1 + m2 v2 = const.
In diesem Fall ist der Gesamtimpuls erhalten und man kann m2 /m1 durch Geschwindigkeitsmessungen bestimmen. Bei einem zentralen Stoß mit den Anfangsgeschwindigkeiten v1 6= 0, v2 = 0 besitzt Masse m2 nach dem Stoß die Geschwindigkeit
v20 =
2m1
v1
m1 + m2
Theoretische Physik I, SS 05, H.-J. Kull
m
7
1,2
F1,2 = G
m1
m2
v1
F 1 = - F2
R
Abbildung 1.5: Massenbestimmung durch (i) Beschleunigungsmessung, (ii) Geschwindigkeitsmessung oder (iii) Messung der
Zentrifugalkraft.
Z 1,2
m
1,2
w
(iii) Schließlich kann man auch die Zentrifugalkräfte Z1,2 = m1,2 aZ bei gleicher
Zentrifugalbeschleunigung aZ bestimmen und erhält daraus
Z2
m2
=
.
m1
Z1
Definition der Kraft: Nachdem Masse und Beschleunigung als Meßgrößen definiert sind, legt Axiom 2 die Kraft als Meßgröße fest. Ihre Einheit ist das Newton:
1N = 1kg
m
s2
Deterministisches Bewegungsgesetz: Im Rahmen der Mechanik besitzen Kräfte
die allgemeine Form
F = F (r, v, t).
Die Bewegung eines Massenpunktes wird eindeutig durch die Bewegungsgleichung
und Anfangswerte für den Ort und die Geschwindigkeit bestimmt. Man spricht von
einer deterministischen Bewegung. Mathematisch handelt es sich um ein Anfangswertproblem für ein Differentialgleichungssystem 2. Ordnung
r̈ =
1
F (r, v, t),
m
r(0) = r0 ,
v0 = v0 .
(1.7)
Unter recht allgemeinen Voraussetzungen existiert eine eindeutige Lösung r =
r(t, r0 , v0 ).
Theoretische Physik I, SS 05, H.-J. Kull
8
Gültigkeitsgrenzen der Mechanik
Die Bewegungsgesetze der Mechanik erlauben im Prinzip die exakte Vorhersage
der zukünftigen Entwicklung des Systems. Sie sind streng deterministisch, d.h. der
zukünftige Zustand wird eindeutig durch die Kenntnis des Anfangszustandes zu
einem Zeitpunkt bestimmt.
Die Erfolge der Newtonschen Mechanik haben anfänglich zu der Ansicht geführt,
dass alle Naturvorgänge exakt den mechanischen Gesetzen gehorchen und durch
diese erklärt werden können (mechanistisches Weltbild). Heute wissen wir, dass die
Mechanik ein mathematisches Modell ist, welches empirische Beobachtungen nur
innerhalb bestimmter Gültigkeitsgrenzen beschreiben kann. Die folgenden Beispiele
sollen dies verdeutlichen:
• Die Vorhersagbarkeit eines Systems wird durch die Quantentheorie (Unschärferelation) prinzipiell eingeschränkt. Die Größe der Quanteneffekte wird durch
das Plancksche Wirkungsquantum ~ charakterisiert. Man unterscheidet daher
zwischen klassischer Mechanik (~ → 0) und der Quantenmechanik (~ 6= 0).
• Für Geschwindigkeiten nahe der Lichtgeschwindigkeit c müssen die Gesetze der
Mechanik entsprechend der speziellen Relativitätstheorie modifiziert werden.
Man unterscheidet hierbei die nichtrelativistische Mechanik (v c) und die
relativistische Mechanik (v ≈ c).
• In starken Gravitationsfeldern ist die Newtonsche Theorie der Gravitationskräfte nicht mehr anwendbar. Die relativistische Gravitationstheorie von Einstein führt Gravitationskräfte auf Trägheitskräfte zurück, die infolge der
Krümmung des Raumes durch Massen auftreten.
• Die Theorie der nichtlinearen Dynamik zeigt, dass der Vorhersagbarkeit eines
nichtlinearen Systems bereits im Rahmen der Newtonschen Mechanik prinzipielle Grenzen gesetzt sind. Die Lösungen nichtlinearer Bewegungsgleichungen
hängen i.a. in komplizierter Weise von den Anfangsbedingungen ab und können
bei beliebig kleinen Änderungen des Anfangszustandes zu ganz unterschiedlichen Ergebnissen führen (deterministisches Chaos).
1.2.3
Axiom 3: actio=reactio
Schwache Form: Das actio=reactio Axiom in der schwachen Form postuliert die
Gleichheit von Kraft und Gegenkraft. Sei F12 die Kraft, die der Massenpunkt 2 auf
den Massenpunkt 1 ausübt und F21 die Gegenkraft, die der Massenpunkt 1 auf den
Massenpunkt 2 ausübt. Dann gilt
F12 = −F21 .
(1.8)
Theoretische Physik I, SS 05, H.-J. Kull
9
Dies gilt auch für eine grosse Masse (Erde) und eine kleine Masse (Apfel). Auf
beide Massen wirkt betragsmässig dieselbe Kraft, die Beschleunigungen sind aber
umgekehrt proportional zur Masse. Eine unendlich grosse Masse erfährt keine Beschleunigung.
Starke Form: In der starken Form verlangt das actio=reactio Axiom zusätzlich
die Gleichheit von Drehmoment und Gegendrehmoment. Sei N12 = r1 × F12 das
Drehmoment, das der Massenpunkt 2 auf den Massenpunkt 1 ausübt und N21 =
r2 × F21 das Gegendrehmoment, das der Massenpunkt 1 auf den Massenpunkt 2
ausübt. Dann gilt
F12 = −F21
und N12 = −N21 .
(1.9)
Die Summe der Drehmomente ergibt
r1 × F12 + r2 × F21 = (r1 − r2 ) × F21 = 0.
(1.10)
Daraus folgt, dass die Wechselwirkungskräfte entlang der Verbindungslinie der beiden Massenpunkte gerichtet sein müssen.
Abbildung 1.6: Links: Actio=reactio
gilt für die Kräfte aber nicht für die
Drehmomente. Rechts: Actio=reactio
gilt für die Kräfte und für die Drehmomente. Die Kräfte sind in diesem Fall
nicht nur entgegengesetzt gleich sondern auch entlang der Verbindungslinie
der Massen gerichtet.
Zusatz
Greifen an einem Körper mehrere Kräfte an, so addieren sich diese vektoriell,
X
F =
F i.
(1.11)
i
Theoretische Physik I, SS 05, H.-J. Kull
10
Dies wird als Superpositionsprinzip der Kräfte oder als Regel vom Parallelogramm
der Kräfte bezeichnet. Es wurde von Newton als Zusatz zu den Bewegungsgesetzen
angegeben.
1.3
Vektoren
1.3.1
Vektor
Ein Vektor ist eine Größe, die durch einen Betrag und eine Richtung festgelegt wird.
Vektoren unterscheiden sich dadurch von Skalaren, wie z.B. der Masse, die nur einen
Betrag aber keine Richtung besitzen. Vektoren können als eine geradlinige Verschiebung eines Punktes betrachtet und in Form eines Verschiebungspfeils dargestellt
werden. Im folgenden wird die Notation a für Vektoren benutzt. Gebräuchlich sind
→
a.
auch die Schreibweisen a oder −
Addition
1. Vektoraddition: a + b = c
Die Addition ist definiert als Hintereinanderausführung zweier Verschiebungen a und b. Das Ergebnis c ist wieder eine Verschiebung. Sie entspricht der
Diagonalen in dem durch die beiden Vektoren a und b aufgespannten Parallelogramm.
2. Nullvektor: a + 0 = a
3. Inverser Vektor: a + (−a) = 0
Die Subtraktion a − b ist definiert als die Addition des inversen Vektors:
a + (−b)
4. Kommutativgesetz: a + b = b + a
5. Assoziativgesetz: a + (b + c) = (a + b) + c
Vielfaches
Sei α 6= 0 eine reelle Zahl. Der Vektor αa besitzt den α-fachen Betrag von a und
ist parallel (α > 0) oder antiparallel (α < 0) zu a gerichtet.
1. α(βa) = (αβ)a
2. α(a + b) = αa + βb
3. (α + β)a = αa + βa
Theoretische Physik I, SS 05, H.-J. Kull
1.3.2
11
Skalarprodukt
Für zwei Vektoren a und b, die den Winkel ϕ einschließen, wird das Skalarprodukt
(Innere Produkt) definiert durch
a · b = ab cos ϕ.
(1.12)
Hierbei bezeichnet a den Betrag von a, b cos ϕ den Betrag der Projektion von b auf
a. Der Betrag eines Vektors a wird auch mit |a| bzw. kak bezeichnet.
b
Abbildung 1.7: Skalarprodukt: Multiplikation von a mit der Komponente
b cos ϕ von b in Richtung von a.
a
1. a · b = b · a
2. (αa) · b = a · (αb) = α(a · b)
3. (a + b) · c = a · c + b · c
4. Orthogonalitätsbedingung: a · b = 0
√
5. Betrag: a = a · a
⇐⇒
a⊥b
Orthonormalbasis
Ein Einheitsvektor e ist ein Vektor mit Betrag e = 1. Die Einheitsvektoren entlang der kartesischen Koordinatenachsen bilden eine orthonormale Basis, d.h. die
Basisvektoren sind Einheitsvektoren, die paarweise zueinander orthogonal sind,
0
i 6= j
ei · ej = δij =
(1.13)
1
i=j
Man nennt δij das Kroneckersymbol. Es bezeichnet die Elemente der Einheitsmatrix.
Theoretische Physik I, SS 05, H.-J. Kull
12
Komponentendarstellung
Ein Vektor kann durch seine Komponenten in einer orthonormalen Basis dargestellt
werden
X
a=
ai ei ,
ai = a · ei
(1.14)
i
Für das Skalarprodukt zweier Vektoren gilt die Darstellung
a·b=
P
(1.15)
ai b i .
i
Dies folgt aus:
!
a·b=
X
ai ei
·b=
i
1.3.3
X
ai (ei · b) =
i
X
ai bi .
i
Vektorprodukt
Für zwei Vektoren a und b, die den Winkel ϕ einschließen, wird das Vektorprodukt
(Äußere Produkt, Kreuzprodukt) definiert durch
a × b = ab sin ϕ e.
(1.16)
Hierbei bezeichnet e einen Einheitsvektor, der auf a und b orthogonal ist und mit
diesen ein Rechtssystem bildet. Der Betrag des Vektorprodukts ist gleich der Fläche
des von den Vektoren a und b aufgespannten Parallelogramms. Die Richtung des
Vektorprodukts ist die Richtung der Flächennormale.
1. a × a = 0
2. a × b = −b × a
3. α(a × b) = (αa) × b = a × (αb)
4. a × (b + c) = a × b + a × c
5. Parallelitätsbedingung: a × b = 0
⇐⇒
akb
Theoretische Physik I, SS 05, H.-J. Kull
13
a
b
Abbildung 1.8: Vektorprodukt:
Multiplikation von a mit der
Komponente b sin ϕ von b senkrecht zu a. Das Produkt ist gleich
dem Flächeninhalt des von a und
b gebildeten Parallelogramms
a
Vektorprodukt der Basisvektoren
e1 × e2 = e3 ,
e2 × e3 = e1 ,
e3 × e1 = e2 ,
e2 × e1 = −e3 ,
e3 × e2 = −e1 ,
e1 × e3 = −e2 .
(1.17)
Allgemein definiert die i-te Komponente des Kreuzproduktes des j-ten mit dem
k-ten Einheitsvektors den Levi-Civita-Tensor (Epsilon-Tensor):
zykl. Vertauschung von 123
1
−1
anitzykl. Vertauschung von 123 .
ei · (ej × ek ) = ijk =
(1.18)
0
sonst
Komponentendarstellung
a
b
−
a
b
2
3
3
2
P
a × b = ijk aj bk ei = a3 b1 − a1 b3
ijk
a1 b 2 − a2 b 1
(1.19)
Theoretische Physik I, SS 05, H.-J. Kull
14
Dies folgt aus:
!
ei · (a × b) = ei ·
X
!
×
aj ej
X
j
=
X
=
X
bk ek
k
aj bk ei · (ej × ek )
jk
ijk aj bk .
jk
Doppelte Produkte
1. Spatprodukt: a · (b × c) = c · (a × b) = b · (c × a)
a1 b 1 c 1 X
a · (b × c) =
ijk ai bj ck = det a2 b2 c2 a3 b 3 c 3 ijk
2. Grassmannprodukt: a × (b × c) = b(a · c) − c(a · b)
3. Lagrangeprodukt: (a × b) · (c × d) = (a · c)(b · d) − (b · c)(a · d)
1.3.4
Vektordifferentiation
Für vektorwertige Funktionen a(t), b(t) gilt
P
1. Differentiation: ddta = ȧ = ȧi ei
i
2. Produktregel:
d
dt
(a · b) = ȧ · b + a · ḃ,
d
dt
(a × b) = ȧ × b + a × ḃ .
Die Produktregel und andere Ableitungsregeln können durch komponentenweise Berechnung leicht bestätigt werden.
1.3.5
Vektordifferentialoperatoren
Für skalare Felder U (x) und Vektorfelder a(r) definiert man die Differentialoperatoren:
1. Nabla-Operator: ∇ = ex ∂∂x + ey ∂∂y + ez ∂∂z
2. Gradient: ∇U = ex ∂U
+ ey ∂U
+ ez ∂U
∂x
∂y
∂z
Theoretische Physik I, SS 05, H.-J. Kull
3. Divergenz: ∇ · a =
∂ax
∂x
+
∂ay
∂y
+
15
∂az
∂z
4. Rotation:
∇×a=
X
∂ak
ei =
∂xj
ijk
ijk
1.4
∂az
∂y
∂ax
∂z
∂ay
∂x
y
− ∂a
∂z
z
− ∂a
∂x
x
− ∂a
∂y
Erhaltungssätze
Gegeben sei ein Systems von N Massenpunkten, die sich unter dem Einfluss einer
externen Kraft und von paarweisen Wechselwirkungskräften bewegen. Die Bewegungsgleichungen lauten
ν = 1, 2, 3 · · · , N .
X
Fν = Fνe +
Fνµ .
mν r̈ν = Fν ,
(1.20)
µ,µ6=ν
Hierbei ist Fνe die externe Kraft auf mν und Fνµ die Wechselwirkungskraft von mµ
auf mν .
Im Rahmen der Newtonschen Axiome lassen sich für ein System von Massenpunkten
Erhaltungssätze für den Impuls, den Drehimpuls und die Energie ableiten.
1.4.1
Impulssatz
Für die Impulsänderung des ν-ten Massenpunktes gilt (1.20). Summiert man beide
Seiten über ν, so folgt der Impulssatz für das Gesamtsystem
Ṗ = Fe ,
P =
P
mν v ν ,
Fe =
ν
P
Fνe .
(1.21)
ν
Hierbei bezeichnet P den Gesamtimpuls und Fe die externe Gesamtkraft. Die interne
Gesamtkraft verschwindet wegen des 3. Axioms (schwache Form)
X
X
X
Fνµ =
Fνµ +
Fνµ
ν,µ,
ν6=µ
=
ν<µ
ν>µ
X
X
ν<µ
Fνµ +
ν<µ
Fµν =
X
Fνµ + Fνµ = 0.
(1.22)
ν<µ
Gibt es keine äußeren Kräfte, so bezeichnet man das System als abgeschlossen. Für
ein abgeschlossenes System ist der Gesamtimpuls erhalten,
F e = 0 ⇒ P = P 0 = const.
(1.23)
Theoretische Physik I, SS 05, H.-J. Kull
1.4.2
16
Drehimpulssatz
Der Drehimpuls Lν und das Drehmoment Nν des ν-ten Massenpunktes bezüglich
des Koordinatenursprungs werden definiert durch
Lν = mν rν × vν ,
Nν = rν × Fν .
(1.24)
Der Drehimpulssatz für den ν-ten Massenpunkt lautet
L̇ν = mν ṙν × vν + mν rν × v̇ν = rν × Fν = Nν .
(1.25)
Summiert man auch hier über alle Massepunkte, so folgt der Drehimpulssatz für das
Gesamtsystem,
L̇ = N e ,
L=
X
mν r ν ×v ν ,
Ne =
X
ν
r ν ×F νe .
(1.26)
ν
Hierbei bezeichnet L den Gesamtdrehimpuls und N e das externe Gesamtdrehmoment. Das interne Gesamtdrehmoment verschwindet wegen des 3. Axioms (starke
Form). Dies folgt analog zu (1.22), indem man dort Fνµ durch Nνµ ersetzt.
Wird auf das System kein externes Drehmoment ausgeübt, dann gilt der Drehimpulserhaltungssatz
Ne = 0
⇒
L = const.
(1.27)
Flächensatz: Eine geometrische Deutung der Drehimpulserhaltung für einen Massenpunkt gibt der Flächensatz. Der Ortsvektor zum Massenpunkt überstreicht in
gleichen Zeiten gleiche Flächen.
Beweis: Im Zeitintervall dt bewegt sich der Massenpunkt um dr = vdt. Hierbei
überstreicht der Ortsvektor die Fläche
1
1
dS = |r×dr| =
Ldt.
2
2m
(1.28)
Bei konstantem Drehimpuls ist die Flächenänderungsrate dS/dt konstant.
1.4.3
Energiesatz
Die kinetische Energie eines Massenpunktes mit der Masse m und der Geschwindigkeit v wird definiert durch
T =
1
mv 2 .
2
(1.29)
Theoretische Physik I, SS 05, H.-J. Kull
17
Abbildung 1.9: Ist der Drehimpuls erhalten,
so werden vom Ortsvektor r in gleichen Zeiten gleiche Flächen überstrichen.
Die kinetische Energie ist richtungsunabhängig. Sie hängt nur vom Betragsquadrat
v 2 = v · v ab.
Für die zeitliche Änderung der kinetischen Energie erhält man mit Hilfe der Bewegungsgleichung
dT
= mv · v̇ = F · v.
dt
Man bezeichnet diese Änderung als die von der Kraft verrichtete Leistung
P =F ·v .
(1.30)
Im Zeitintervall dt ändert sich der Ort des Massenpunktes um dr = vdt. Man
bezeichnet
dW = P dt = F ·dr .
(1.31)
als die von der Kraft F längs des vektoriellen Wegelementes dr geleistete Arbeit.
Nur die Kraftkomponente parallel zum Wegelement verrichtet Arbeit. Zum Beispiel
verrichtet die Lorentzkraft keine Arbeit, wenn sich eine Ladung q in einem Magnetfeld B mit der Geschwindigkeit v bewegt:
q
dW = F ·vdt = (v×B)·vdt = 0.
c
Die Ladung bewegt sich hier auf einer Kreisbahn und die Kraft verändert daher nur
die Richtung aber nicht den Betrag der Geschwindigkeit.
Bewegt sich der Massenpunkt zwischen den Zeitpunkten t0 und t1 von einem Anfangspunkt r 0 zu einem Endpunkt r 1 entlang einer Kurve γ, so erhält man für diesen
Theoretische Physik I, SS 05, H.-J. Kull
18
Abbildung 1.10: Für jedes Wegelement dr verrichtet die Tangentialkomponente der
Kraft F die Arbeit dW = F ·dr (links). Die Gesamtarbeit, die zwischen einem
Anfangspunkt 1 und einem Endpunkt 2 verrichtet wird, hängt im allgemeinen vom
Weg ab (rechts). Für den Weg γ1 ist die Tangentialkomponente der Kraft immer
kleiner als für den Weg γ2 .
Weg den Energiesatz
Zt1
Z
F ·dr =
T1 − T0 =
γ
F (r(t), v(t), t)·v(t)dt .
(1.32)
t0
Die Änderung der kinetischen Energie ist gleich der gesamten von der Kraft auf
dem Weg verrichteten Arbeit. Im allgemeinen hängt die von einer Kraft F =
F (r(t), ṙ(t), t) verrichtete Arbeit vom Verlauf der Bahnkurve r(t) ab (Abb. 1.10).
Energieerhaltung
Ein wichtiger Spezialfall liegt vor, wenn die Arbeit wegunabhängig ist, d.h. für alle
Wege zwischen zwei Endpunkten hängt die Arbeit nur von der Lage der Endpunkte ab. In diesem Fall gibt es einen Energieerhaltungssatz und die Kraft wird als
konservativ bezeichnet.
Ein Beispiel einer konservativen Kraft ist die Schwerkraft. Für einen beliebigen Weg
von der Höhe z0 auf die Höhe z1 verrichtet die Schwerkraft G = −mgez immer die
Arbeit
Zr 1
Zz1
W = dr·G = dz(−mg) = −mg(z1 − z0 ) = U (z0 ) − U (z1 ).
z0
r0
Theoretische Physik I, SS 05, H.-J. Kull
19
Hierbei ist U (z) = mgz die potentielle Energie, die nur von der Höhe des Körpers
abhängt.
Ist die Arbeit wegunabhängig, so kann man allgemein eine potentielle Energie
R
U (r) = − F ·dr
(1.33)
definieren. Ohne Einschränkung kann man einen beliebigen Weg wählen und entlang dieses Weges mit der Bogenlänge als Kurvenparameter eine Stammfunktion
berechnen,
Z
dr
.
U (r) = − (F ·t) ds ,
t=
ds
Die Arbeit ist dann die Differenz der potentiellen Energien in den Endpunkten des
Weges,
r 1
Zr 1
(1.34)
W = F ·dr = −U (r) = U (r 0 ) − U (r 1 ) .
r
0
r0
Aus dem Energiesatz (1.32) folgt mit (1.34)
T1 + U (r 1 ) = T0 + U (r 0 ) = E.
Da der Endpunkt beliebig gewählt werden kann, bleibt die Gesamtenergie E bei
der Bewegung r = r(t) mit der Geschwindigkeit v = v(t) konstant und es gilt der
Energieerhaltungssatz
1
mv 2 + U (r) = E
2
(1.35)
Konservative Kräfte
Es stellt sich nun die Frage, welche Kräfte konservativ sind, d.h. ein Potential besitzen. Dazu nehmen wir an, dass ein Potential existiert und leiten daraus die allgemeine Form des zugehörigen Kraftfeldes her.
Es existiere ein Potential U (r), so dass die Arbeit wegunabhängig ist und der Energiesatz (1.35) gilt. Dann erhält man durch Zeitableitung
dU
dT
+
= (F + ∇U )·v = 0 .
(1.36)
dt
dt
Allgemein kann das Differential einer Funktion f (r) mit Hilfe des Gradienten angegeben werden,
df =
∂f
∂f
∂f
dx +
dy +
dz = dr·∇f.
∂x
∂y
∂z
(1.37)
Theoretische Physik I, SS 05, H.-J. Kull
20
Aus (1.36) folgt, dass der Vektor F +∇U senkrecht auf der Geschwindigkeit v steht.
Mit einem beliebigen Vektor A gilt daher für konservative Kräfte
F = −∇U + v×A.
(1.38)
Insbesondere haben geschwindigkeitsunabhängige konservative Kräfte die einfache
Form
F = −∇U .
(1.39)
Ein notwendiges und hinreichendes Kriterium dafür, dass eine geschwindigkeitsunabhängige Kraft in einem einfach zusammenhängenden Gebiet konservativ ist, lautet
∇ × F = 0.
(1.40)
Die Bedingung ist notwendig. Ist F konservativ, so folgt daraus notwendig (1.40).
Denn eine konservative ortsabhängige Kraft ist nach (1.39) aus einem Potential
ableitbar und die Rotation des Gradienten verschwindet:
(∇ × F )i = −
X
jk
ijk
X
X
∂2U
∂2U
∂2U
ikj
ijk
=−
=
= 0.
∂xj ∂xk
∂xk ∂xj
∂xj ∂xk
kj
jk
Umgekehrt kann man auch zeigen, dass die Bedingung (1.40) hinreichend dafür ist,
dass die Arbeit wegunabhängig ist. Dies folgt aus dem Stokeschen Integralsatz, der
in der Vektoranalysis und in der Elektrostatik behandelt wird.
1.5
Eindimensionale Bewegungen
Im folgenden betrachten wir eindimensionale Bewegungen x = x(t), die einer Bewegungsgleichung 2. Ordnung
mẍ = F (x, ẋ, t)
mit den Anfangsbedingungen
x(0) = x0 ,
v(0) = v0
genügen. Die wesentliche physikalische Einschränkung ist hierbei, dass die xKomponente der Kraft F (x, ẋ, t) unabhängig ist von den restlichen Koordinaten y,
z und Geschwindigkeiten ẏ, ż des Massepunktes. Die Bewegung in der x-Richtung
ist dann unabhängig von der Bewegung in der y oder z Richtung.
Theoretische Physik I, SS 05, H.-J. Kull
1.5.1
21
Zeitabhängige Kraft
Hängt die Kraft nur von der Zeit ab, F = F (t), so kann die Bewegungsgleichung
durch Integration direkt gelöst werden,
1
v(t) = v0 +
m
Zt
dt0 F (t0 )
0
Zt
x(t) = x0 +
dt0 v(t0 )
0
1.5.2
Geschwindigkeitsabhängige Kraft
Ist die Kraft nur von der Geschwindigkeit abhängig, F = F (v), so bestimmt man
zunächst die Funktion t = t(v) durch
dt(v)
1
m
=
=
dv
v̇
F (v)
v
Z
m
t =
dv 0
F (v 0 )
(1.41)
v0
Die gesuchte Funktion v = v(t) ist die Umkehrfunktion von t = t(v). Die Umkehrfunktion existiert lokal in der Umgebung eines Punktes v∗ falls t0 (v∗ ) 6= 0. Dann
ist dt = t0 (v∗ )dv nach dv = dt/t0 (v∗ ) auflösbar. Mit v(t) erhält man x(t) durch
Integration
Zt
x(t) = x0 + dt0 v(t0 ).
(1.42)
0
1.5.3
Ortsabhängige Kraft
Besondere Bedeutung haben Kräfte F = F (x), die nur vom Ort abhängen. Für
diese Kräfte existiert ein Energieerhaltungssatz. Multipliziert man die Bewegungsgleichung mit ẋ, so gilt
mẍẋ = F (x)ẋ,
x(t)
Z
d 1
d
mẋ2
=
dx0 F (x0 ) .
dt 2
dt
a
Theoretische Physik I, SS 05, H.-J. Kull
22
Definiert man die kinetische Energie T (v) und die potentielle Energie U (x) durch
1
T (v) = mv 2 ,
2
Zx
U (x) = −
dx0 F (x0 ),
U (a) = 0
(1.43)
a
mit einem beliebigen Bezugspunkt a, so folgt daraus der Energieerhaltungssatz
d
(T + U ) = 0,
dt
T (v) + U (x) = E.
(1.44)
Die Gesamtenergie E ist eine Konstante, die bei der Bewegung, x = x(t), v = v(t)
erhalten bleibt.
Bewegung im Potential, Umkehrpunkte, Gleichgewichte
Aus dem Energiesatzes können wichtige Folgerungen für die Bewegung des Massepunktes gezogen werden. Dazu verwendet man häufig eine graphische Darstellung
der Energie als Funktion der Koordinate x (Abb. (1.11)). Die potentielle Energie
y = U (x) ist eine Funktion von x, die Gesamtenergie y = E eine vorgegebene Konstante. Die kinetische Energie am Ort x ergibt sich aus der Differenz T = E − U (x).
Da die kinetische Energie nie negativ sein kann, ist die Bewegung auf Gebiete mit
E − U (x) > 0 eingeschränkt, d.h. auf diejenigen Gebiete in denen die Potentialkurve
y = U (x) unterhalb der horizontalen Geraden y = E verläuft.
Die Umkehrpunkte x = xu der Bewegung werden definiert durch die Nullstellen von
E − U (xu ) = 0.
(1.45)
An den Umkehrpunkten gilt T = 0 und daher auch v = 0. Im Umkehrpunkt ist
die Kraft i.a. ungleich Null, so dass die Bewegung nicht zur Ruhe kommt, sondern
nur ihre Richtung umkehrt. Aus der Definition des Potentials folgt, dass die Kraft
immer in der Richtung des abnehmenden Potentials gerichtet ist,
dU (x)
.
(1.46)
dx
Verläuft eine Bahn zwischen zwei Umkehrpunkten, so ist die Bewegung periodisch.
F (x) = −
Gleichgewichtspunkte x = xg , die eine mögliche Ruhelage darstellen, werden definiert durch die Nullstellen der Kraft, bzw. die Extrema des Potentials,
F (xg ) = −
dU (xg )
=0.
dx
(1.47)
Theoretische Physik I, SS 05, H.-J. Kull
23
Um die Stabilität eines solchen Kräftegleichgewichts zu untersuchen, entwickelt man
das Potential um den Gleichgewichtspunkt bis zur zweiten Ordnung,
1 d2 U (xg )
dU (xg )
(x − xg ) +
(x − xg )2 .
dx
2 dx2
Wegen der Gleichgewichtsbedingung (1.47) verschwindet die erste Ordnung, so dass
die Kraft durch die zweite Ordnung bestimmt wird,
U (x) = U (xg ) +
d2 U (xg )
(x − xg ).
dx2
Abhängig vom Vorzeichen der zweiten Ableitung des Potentials unterscheidet man
stabile und instabile Gleichgewichte,
F (x) = −
d2 U (xg )
> 0,
stabil
dx2
d2 U (xg )
< 0,
instabil
dx2
Ein stabiles Gleichgewicht entspricht also einem Potentialminimum, ein instabiles
einem Potentialmaximum.
y
y= U(x)
E5
E4
E3
E2
E1
x
Abbildung 1.11: Bewegung im Potential U(x) bei verschiedenen Energien.
E1 : Stabiles Gleichgewicht, E2 : Periodische Bewegung im linken Potentialminimum, stabiles Gleichgewicht im
rechten Potentialminimum, E3 : Periodische Bewegungen in beiden Minima,
E4 : Instabiles Gleichgewicht, Grenzkurve zwischen den periodischen Bewegungen unterhalb und oberhalb des Potentialmaximums, E5 : Periodische Bewegung oberhalb des Potentialmaximums.
Phasenebene
Der Phasenraum einer eindimensionalen Bewegung ist die durch (x, p) aufgespannte
Phasenebene. Die Kurven, die eine Bewegung in der Phasenebene durchläuft, werden
durch den Energiesatz bestimmt,
p
p2
+ U (x) = E,
p = ± 2m(E − U (x)).
2m
Theoretische Physik I, SS 05, H.-J. Kull
24
Abbildung (1.12) zeigt die der Potentialdarstellung (1.11) entsprechenden Kurven
in der Phasenebene. Die Kurven werden im Uhrzeigersinn durchlaufen. Kurven zu
verschiedenen Energien dürfen sich nicht schneiden, da sie durch eine Anfangsbedingung (x, p) bereits eindeutig festgelegt sind. Sie bilden daher ein System ineinander
geschachtelter Ringe um die stabilen Gleichgewichtspunkte. Die Kurve durch den instabilen Gleichgewichtspunkt nennt man Separatrix, da Sie Bereiche mit qualitativ
verschiedenen Kurven voneinander trennt.
p
Abbildung 1.12: Bewegung in der Phasenebene. Die einzelnen Kurven entsprechen
den Energien in Abbildung (1.11). Die auf
der x-Achse hervorgehobenen Punkte sind die
Gleichgewichtspunkte. Durch den mittleren
instabilen Gleichgewichtspunkt geht die Separatrix.
x
Zeitabhängigkeit der Bewegung, Periode
Ausgehend vom Energiesatz erhält man für die Geschwindigkeit den Ausdruck,
r
dx
2
=±
(E − U (x)).
v=
dt
m
Das Vorzeichen wird durch das Vorzeichen der Anfangsgeschwindigkeit und nachfolgende Vorzeichenwechsel an den Umkehrpunkten bestimmt. Damit lässt sich
zunächst die Funktion t = t(x) als Integral darstellen
dt
=
dx
1
dx
dt
Zx
t(x) =
x0
=
1
v(x, E)
dx0
q
.
± m2 (E − U (x0 ))
(1.48)
Durch die Bildung der Umkehrfunktion erhält man aus t = t(x) die gesuchte Bewegung x = x(t). Die Umkehrfunktion existiert lokal für t0 (x) = 1/v 6= 0.
Theoretische Physik I, SS 05, H.-J. Kull
25
Ist die Bewegung periodisch so erhält man die Periode T durch eine Integration über
einen Umlauf. Sind die beiden Umkehrpunkte der Bahn x1 und x2 , dann gilt
Zx2
T =
q
x1
2
(E
m
Zx2
= 2
1.6
+
− U)
x2
dx
q
− m2 (E − U )
dx
q
x1
Zx1
dx
2
(E
m
(1.49)
− U)
Bewegung im Zentralpotential
Die Bewegung eines Massenpunktes unter Einwirkung einer konservativen isotropen Kraft stellt ein Grundproblem der klassischen Mechanik dar, das aufgrund von
Erhaltungssätzen vollständig gelöst werden kann.
Bei der Bewegung einer kleinen Masse um eine große Masse ist wegen der Gleichheit von actio und reactio die Beschleunigung der großen Masse sehr viel kleiner
als die der kleinen Masse. Daher kann man die Bewegung der kleinen Masse näherungsweise als Einkörperproblem mit einem festen Kraftzentrum behandeln. Auch
das allgemeine Zweikörperproblem kann auf ein Einkörperproblem reduziert werden,
bei dem sich dann aber eine effektive Masse um den gemeinsamen Schwerpunkt bewegt.
1.6.1
Zentralpotential und Zentralkraft
Ein Zentralpotential bezeichnet ein radialsymmetrisches Potential, das nur vom Abstand zum Koordinatenursprung abhängt:
U = U (r),
r=
p
x2 + y 2 + z 2 .
Die Äquipotentialflächen sind Kugelflächen.
Beispiele:
• Isotroper harmonischer Oszillator (Schwingungen)
1
U = kr2 ,
2
k = const,
• Gravitationspotential (Massen) bzw. Coulombpotential (Ladungen):
α
U= ,
α = const
r
(1.50)
Theoretische Physik I, SS 05, H.-J. Kull
26
• Yukawapotential (Atomkerne):
U=
α
exp(−κr),
r
α, κ = const
• Lennard-Jones Potential (Moleküle):
U=
λ
µ
− 6,
12
r
r
λ, µ = const
Die durch ein Zentralpotential definierte Kraft heißt Zentralkraft. Der Gradient
zeigt in Richtung der Flächennormalen von U = U (r). Die abgeleitete Zentralkraft
ist daher in radialer Richtung gerichtet und hängt betragsmäßig nur vom Abstand
ab,
F = −∇U (r) = F (r) rr ,
F (r) = − dUdr(r) .
(1.51)
Die kartesischen Komponenten des Gradienten von U (r) wurden hierbei nach der
Kettenregel berechnet
dU (r) ∂r
dU (r) 1
dU (r) xi
∂U (r)
=
=
(2xi ) =
.
∂xi
dr ∂xi
dr 2r
dr
r
(1.52)
Die Bewegung eines Massenpunktes in einem Zentralpotential wird durch das Anfangswertproblem
r
mr̈ = F (r) ,
r
r(0) = r0 ,
v(0) = v0
(1.53)
beschrieben. Die allgemeine Lösung der Bewegungsgleichung enthält 6 Integrationskonstanten, die durch die Anfangsbedingungen bestimmt werden. Zur Lösung
werden die Erhaltungssätze für den Drehimpuls und die Energie ausgenutzt. Diese legen 4 Integrationskonstanten fest. Nach Ausnutzung der Erhaltungssätze sind
daher nur noch zwei Integrationen auszuführen.
1.6.2
Drehimpulserhaltung
Eine Zentralkraft übt bezüglich des Koordinatenursprungs kein Drehmoment aus,
N = r × F = F (r)r × r = 0.
(1.54)
L = mr × v = mr0 × v0
(1.55)
Daher ist der Drehimpuls
Theoretische Physik I, SS 05, H.-J. Kull
27
erhalten. Ist L = 0, so sind r0 und v0 parallel gerichtet, d.h. die Bewegung erfolgt
in radialer Richtung. Dieser Sonderfall entspricht einer eindimensionalen Bewegung
mit einer ortabhängigen Kraft (Abschnitt 1.5.3).
Bahnebene: Ist L 6= 0, so steht der Drehimpuls senkrecht auf der Bahnebene, die
durch die Vektoren r0 und v0 aufgespannt wird. Wählt man ein Koordinatensystem,
dessen z-Achse in Richtung des Drehimpulses gerichtet ist, so verläuft die Bahn in
der xy-Ebene. Wegen der Radialsymmetrie des Potentials ist es zweckmäßig in der
Bahnebene Polarkoordinaten (r, ϕ) einzuführen,
x = r cos ϕ,
y = r sin ϕ.
(1.56)
Der Bewegung (x(t), y(t)) des Massenpunktes in kartesischen Koordinaten entspricht
eine Bewegung (r(t), ϕ(t)) in Polarkoordinaten. Die Geschwindigkeitskomponenten
transformieren sich gemäß
ẋ = ṙ cos ϕ − rϕ̇ sin ϕ,
ẏ = ṙ sin ϕ + rϕ̇ cos ϕ .
(1.57)
Mit den Transformationsgleichungen (1.56), (1.57) erhält man für den Drehimpuls
die Beziehung
L = m(xẏ − y ẋ) = mr2 ϕ̇ .
(1.58)
Dieser bestimmt die Winkelgeschwindigkeit ϕ̇ als Funktion des Abstandes vom
Kraftzentrum
ϕ̇ =
1.6.3
L
.
mr2
(1.59)
Energieerhaltung
Da die Zentralkraft aus dem Zentralpotential ableitbar ist, gilt der Energierhaltungssatz
1
1
E = mv 2 + U (r) = v02 + U (r0 ).
2
2
(1.60)
Für das Betragsquadrat der Geschwindigkeit gilt
v 2 = ẋ2 + ẏ 2 = ṙ2 + r2 ϕ̇2 = ṙ2 +
L2
.
m2 r 2
(1.61)
Theoretische Physik I, SS 05, H.-J. Kull
28
Im letzten Schritt wurde die Winkelgeschwindigkeit mit Hilfe des Drehimpulses eliminiert. Definiert man ein effektives Potential durch
Uef f (r) =
L2
+ U (r) .
2mr2
(1.62)
so erhält man einen Energiesatz für die Radialbewegung r = r(t),
E = 21 mṙ2 + Uef f (r) .
(1.63)
Differenziert man (1.63) nach der Zeit, so erhält man die Bewegungsgleichung
mr̈ = −
dUef f
L2
=
+ F (r) = mϕ̇2 r + F (r).
dr
mr3
(1.64)
Als Kraft in radialer Richtung wirkt neben der Zentralkraft F (r) auch die ZentriL2
fugalkraft mϕ̇2 r. Der Zentrifugalkraft entspricht das Zentrifugalpotential 2mr
2 im
effektiven Potential.
1.6.4
Bewegung und Bahnkurve
Die Erhaltungssätze (1.59), (1.63) bilden ein System von 2 gekoppelten Differentialgleichungen 1. Ordnung für die Funktionen r(t) und ϕ(t). Zur eindeutigen Festlegung
einer Lösung sind noch zwei Anfangsbedingungen
r(0) = r0 ,
ϕ(0) = ϕ0
(1.65)
erforderlich.
Man kann die Radialbewegung r = r(t) als eine eindimensionale Bewegung in einem
effektiven Potential Uef f (r) auffassen und entsprechend integrieren
r
Z r(t)
2
dr0
q
(E − Uef f ),
t=±
.
ṙ = ±
m
2
r0
(E − U )
m
ef f
Die Lösung t = t(r) bestimmt implizit die Radialbewegung r = r(t). Damit kann
die Winkelbewegung ϕ = ϕ(t) ebenfalls integriert werden,
Zt
ϕ(t) = ϕ0 +
0
L 0
dt .
mr2
(1.66)
Theoretische Physik I, SS 05, H.-J. Kull
29
Die Bewegung r = r(t), ϕ = ϕ(t) stellt eine Parameterdarstellung der Bahnkurve
r = r(ϕ) mit dem Kurvenparameter t dar. Die Bahnkurve kann wegen
dϕ
ϕ̇
L
= =± p
2
dr
ṙ
r 2m(E − Uef f )
(1.67)
auch direkt durch das Integral
Z
r(t)
ϕ = ϕ0 ±
r0
Ldr
p
,
r2 2m(E − Uef f )
(1.68)
dargestellt werden. Die Umkehrung von ϕ = ϕ(r) ergibt r = r(ϕ).
1.6.5
Radialbewegung im effektiven Potential
Die Radialbwegung wird durch das effektive Potential Uef f (r) bestimmt. Abbildung
(1.13) zeigt das effektive Potential für die Potentiale U = αr2 und U = −α/r
mit α > 0. Die Radialbewegung ist auf die Bereiche mit E > Uef f eingeschränkt.
Punkte, in denen E = Uef f sind Umkehrpunkte der Radialbewegung. Falls die Bedingung E > Uef f nur in einem endlichen Intervall rmin < r < rmax erfüllt ist,
spricht man von einer gebundenen Bahn. Bei einer gebundenen Bahn verläuft die
Radialbewegung zwischen zwei Umkehrpunkten rmin und rmax .
Abbildung 1.13: Effektives Potential Uef f = U + L2 /2mr2 für U = αr2 und U =
−α/r.
An den Umkehrpunkten der Radialbewegung gilt ṙ = 0 aber ϕ̇ 6= 0, nach (1.59).
Daher dreht sich der Ortsvektor an diesen Umkehrpunkten in der Bahnebene weiter.
Theoretische Physik I, SS 05, H.-J. Kull
30
Bei einer ungebundenen Bewegung kommt die Bahn aus dem Unendlichen, nähert
sich dem Kraftzentrum bis auf einen minimalen Abstand r0 und entfernt sich dann
wieder ins Unendliche.
Abbildung 1.14: Bahnkurven einer ungebundenen Bewegung in
einem anziehenden (rechts) und
einem abstoßenden (links) Zentralpotential. Die Bahn nähert
sich dem Zentrum bis zum minimalen Abstand r0 .
1.6.6
Winkelbewegung um das Kraftzentrum
Einem Umlauf im effektiven Potential von rmin nach rmax und zurück nach rmin
entspricht ein Winkelzuwachs
Z rmax
2Ldr
p
(1.69)
∆ϕ =
2
2m(E − Uef f )
rmin r
für den Umlauf des Teilchens um das Kraftzentrum. Die Bahn des Teilchens verläuft,
wie in Abb. (1.15) dargestellt innerhalb eines Kreisringes, wobei sich die Radien
zu zwei aufeinanderfolgenden Scheitelpunkten der Bahn am äußeren bzw. inneren
Rand des Ringes um den Winkel (1.69) drehen. Die Bahn ist geschlossen, falls für
ganzzahlige m und n die Bedingung
m∆ϕ = n2π
(1.70)
erfüllt wird. Dann schließt sich die Bahn nach m Umläufen im effektiven Potential
bzw. n Umläufen um das Kraftzentrum (Rosettenbahn). Ist ∆ϕ kein rationales Vielfaches von 2π, so ist die Bahn offen und erfüllt nach beliebig vielen Umläufen den
gesamten Kreisring. Man kann zeigen, dass sie jedem Punkt des Kreisringes beliebig
nahe kommt und bezeichnet solche Bahnen als ergodisch.
Theoretische Physik I, SS 05, H.-J. Kull
31
Abbildung 1.15: Bahnkurve einer gebundenen Bewegung in einem Zentralpotential. Die
Bahn verläuft innerhalb des Kreisringes zwischen rmin und rmax . Die Teilstücke der Bahn
zwischen 2 Umkehrpunkten sind jeweils spiegelsymmetrisch bezüglich der vom Zentrum
zu den Umkehrpunkten gerichteten Radien
rmin bzw. rmax .
1.7
Kepler-Problem
Die Bestimmung der Bewegung eines Massenpunktes in einem Zentralfeld der Form
α
U (r) = − ,
r
F =−
α r
,
r2 r
α = const,
(1.71)
wird als das Kepler-Problem bezeichnet. Für α = γmM ist es auf die Planetenbewegung (Masse m) um die Sonne (Masse M ) anwendbar, wobei die Sonne als festes
Zentrum behandelt wird. Im Rahmen der Newtonschen Theorie können die Keplerschen Planetengesetze hergeleitet und durch das universelle Gravitationsgesetz
(1.71) begründet werden. Dies war einer der größten und überzeugendsten Erfolge
der Newtonschen Mechanik.
1.7.1
Keplersche Gesetze
1.) Die Planetenbahnen sind Ellipsen. Die Sonne befindet sich in einem Brennpunkt der Ellipse.
2.) Der von der Sonne zum Planeten gerichtete Vektor überstreicht in gleichen
Zeiten gleiche Flächen.
3.) Für 2 Planetenbahnen verhalten sich die Quadrate der Umlaufzeiten wie die
Kuben der großen Halbachsen.
Das zweite Keplersche Gesetz ist der Flächensatz (1.28), der allgemein aus der Drehimpulserhaltung folgt. Das erste und dritte Gesetz werden im folgenden aus der
Lösung des Kepler-Problems abgeleitet.
Theoretische Physik I, SS 05, H.-J. Kull
32
Effektives Potential
Abbildung 1.16: Effektives Potential für ein anziehendes 1/rPotential. Für negative Energien sind die Bahnen gebunden.
Die Radialbewegung verläuft zwischen den Umkehrpunkten rmin
und rmax . Für positive Energien existieren keine gebundenen
Bahnen. Ein einfallendes Teilchen wird am Kraftzentrum gestreut und entfernt sich danach
wieder beliebig weit.
Das effektive Potential
L2
α
+
(1.72)
r
2mr2
besitzt das in Abb.(1.16) dargestellte Verhalten. Für L 6= 0 existiert ein Minimum
bei
L2
1 mα2
r∗ =
,
U∗ = −
.
(1.73)
mα
2 L2
Demnach gibt es gebundene Bahnen für negative Energien im Intervall
Uef f = −
mα2
− 2 ≤ E < 0.
2L
(1.74)
Für positive Energien sind die Bahnen ungebunden.
1.7.2
Bahnkurven
Die Bahnkurve r = r(ϕ) wird durch das Integral
Z
L dr
q
ϕ=
r2 2m(E + αr ) −
(1.75)
L2
r2
bestimmt.
Es ist hilfreich mit Hilfe von (1.73) die Parameter p = r∗ und =
p
(U∗ − E)/U∗ einzuführen. Explizit lautet diese Definition
L2
p=
,
mα
r
=
1+
2EL2
.
mα2
(1.76)
Theoretische Physik I, SS 05, H.-J. Kull
33
Damit erhält man durch quadratische Ergänzung
L2
α
2m(E + ) − 2
r
r
m2 α2 2EL2 2p p2
− 2
=
+
L2
mα2
r
r
2
2
L
p
2
=
−
−
1
p2
r
"
2 #
L2 2
p/r − 1
=
1−
.
p2
Mit der Substitution
ξ=
p/r − 1
,
dξ = −
p 1
dr,
r2
der Integrationsvariablen folgt
Z
dξ
= arccos ξ + const.
ϕ=− p
1 − ξ2
Die hierbei auftretende Integrationskonstante kann Null gesetzt werden. Dies entspricht einer Drehung des Koordinatensystems, so dass der Wert ξ = 1 für ϕ = 0
angenommen wird. Löst man nach r auf, so erhält man die Bahnkurve:
r=
p
1 + cos ϕ
(1.77)
Sie beschreibt Kegelschnitte mit Parameter p und Exzentrizität . Für < 1 sind
dies Ellipsen, für > 1 Hyperbeln, für = 1 Parabeln. Eine Kreisbahn ( = 0)
ist ein Spezialfall einer Ellipse.
1.7.3
Ellipsenbahnen
Für im Intervall 0 < < 1 sind die Bahnkurven Ellipsen. Dieses Intervall entspricht dem Energieintervall (1.74) für gebundene Bahnen im effektiven Potential.
Der Grenzfall = 0 entspricht dabei der Kreisbahn im Minimum des effektiven
Potentials.
Nach Abbildung (1.17) und gemäß der Polargleichung (1.77) bestehen für die Para-
Theoretische Physik I, SS 05, H.-J. Kull
34
meter der Ellipse folgende Relationen,
2a = r1 + r2
p
rmax = r(π) =
,
p = r(π/2)
1−
p
1
1
p
1
(rmin + rmax ) =
+
=
a =
.
2
2 1+ 1−
1 − 2
1
p
1
1
p
∆ =
(rmax − rmin ) =
−
=
= a .
2
2 1− 1+
1 − 2
√
b2 + ∆2 = a2 ,
b = 1 − 2 a
rmin = r(0) =
p
,
1+
Abbildung 1.17: Ellipse mit
Halbachsen a, b, Halbparameter p und Exzentrität .
Daraus erhält man für die große Halbachse
a=
L2 mα2
α
p
=
=
2
2
1−
mα 2|E|L
2|E|
(1.78)
und für die kleine Halbachse
b=
√
r
1 − 2 a =
2|E|L2 α
L
.
=p
2
mα 2|E|
2m|E|
(1.79)
Der Halbparameter p ist eindeutig durch L bestimmt. Die große Halbachse a ist
eindeutig durch E bestimmt. Abbildung (1.18) zeigt schematisch die Ellipsenbahnen
als Funktion des Drehimpulses bei fester Energie und als Funktion der Energie bei
festem Drehimpuls.
Theoretische Physik I, SS 05, H.-J. Kull
35
Abbildung 1.18: Links: Bahnellipsen bei festem E und Variation von L. Die Kreisbahn besitzt den größtmöglichen Drehimpuls. Rechts: Bahnellipsen bei festem L und
Variation von E. Die Kreisbahn besitzt die kleinstmögliche Energie.
Umlaufperiode
Aufgrund des Flächensatzes (1.28) gilt für eine Umlaufperiode T
L
T
2m
r
2m
2πm α
L
m 3
p
T =
πab =
= 2π
a2
L
L 2|E|
α
2m|E|
S = πab =
Mit α = γmM ergibt sich für die Umlaufperiode T und die große Halbachse a der
Zusammenhang.
T2 =
(2π)2 3
a
γM
(1.80)
Da die Proportionalitätskonstante für alle Planeten und für alle Drehimpulse gleich
groß ist, erhält man hieraus das dritte Keplersche Gesetz.
Theoretische Physik I, SS 05, H.-J. Kull
1.7.4
36
Coulomb-Streuung
Für > 1 sind die Bahnkurven Hyperbeln. Sie beschreiben die Streuung von Teilchen
mit Energien E > 0. Ein wichtiges Anwendungsbeispiel ist die Streuung geladener
Teilchen im Coulomb-Feld. Wir berechnen zunächst den Ablenkwinkel bei der Streuung eines einzelnen Teilchens und dann den differentiellen Wirkungsquerschnitt für
die Streuung eines Teilchenstrahls in das Raumwinkelelement dΩ.
1.7.5
Stoßgeschwindigkeit und Stoßparameter
Die Streuung eines Teilchens an einem festen Potential wird vollständig durch die
Stoßgeschwindigkeit v0 und den Stoßparameter s des einfallenden Teilchens bestimmt. Der Stoßparameter ist der Abstand des Streuzentrums von der geradlinigen
Bahn, auf der sich das Teilchen ohne Streuung bewegen würde. Diese Parameter
legen die Energie und den Drehimpuls der Bahn fest. Bewegt sich das einfallende
Teilchen asymptotisch in konstantem Abstand s von der x-Achse, r = x(t)ex + sey ,
mit der Geschwindigkeit v = v0 ex so gilt
1
E = mv02 ,
2
L = mr × v = −msv0 ez .
(1.81)
Mit L2 = 2ms2 E erhält man für die entsprechenden Werte des Halbparamaters p
und der Exzentrizität p =
2Es2
L2
=
,
mα
α
(1.82)
r
=
1.7.6
2EL2
1+
=
mα2
s
1+
2Es
α
2
.
Ablenkwinkel
Das auslaufende Teilchen bewegt sich asymptotisch ebenfalls entlang einer Geraden.
Diese ist gegenüber der x-Achse um den Ablenkwinkel ϑ geneigt. Für abstoßende
Wechselwirkung gilt gemäß (1.82) und (1.77),
α < 0,
p < 0,
1 + cos ϕ < 0,
ϕ(rmin ) = π.
(1.83)
Die Polarkoordinaten sind so zu wählen, dass ϕ = π für r = rmin gilt. Die Achse des
Polarkoordinatensystems ist also von rmin zum Ursprung gerichtet (Abb. (1.19)).
Bei anziehender Wechselwirkung gilt entsprechend
α > 0,
p > 0,
1 + cos ϕ > 0,
ϕ(rmin ) = 0.
(1.84)
Theoretische Physik I, SS 05, H.-J. Kull
Abbildung 1.19: Streuung an einem abstoßenden Coulomb-Potential.
Abbildung 1.20: Streuung an einem anziehenden Coulomb-Potential.
37
Theoretische Physik I, SS 05, H.-J. Kull
38
Hier zeigt die Achse des Polarkoordinatensystems vom Ursprung zum Punkt rmin
(Abb. (1.20)). In beiden Fällen besteht zwischen dem Polarwinkel ϕ = ϕ0 und dem
Ablenkwinkel ϑ der auslaufenden Asymptote der Zusammenhang
ϑ = 2ϕ0 − π,
ϕ0 =
ϑ π
+ .
2
2
(1.85)
Der Ablenkwinkel bei der Coulomb-Streuung läßt sich nun einfach bestimmen. Aus
der Polargleichung (1.77), ergibt sich für die auslaufende Asymptote (r → ∞) die
Bedingung
ϑ π
ϑ
1 + cos ϕ0 = 1 + cos
+
= 1 − sin = 0.,
2
2
2
und für den Ablenkwinkel die Beziehung
sin
1
ϑ
= .
2
(1.86)
Ersetzt man mit Hilfe von (1.82), so folgt
2 =
2Es
α
2
1
sin (ϑ/2)
2
1 − sin2 ϑ/2
1
−
1
=
=
=
sin2 ϑ/2
sin2 ϑ/2
cos ϑ/2
sin ϑ/2
2
(1.87)
Daraus ergibt sich der gesuchte Zusammenhang zwischen dem Ablenkwinkel und
dem Stoßparameter bei der Coulomb-Streuung
ϑ
s⊥
tan
=
,
2
s
s⊥ =
|α|
.
2E
(1.88)
Hierbei bezeichnet s⊥ den Stoßparameter für eine 90o -Ablenkung (ϑ = π/2).
Vorwärtsstreuung (ϑ = 0) entspricht dem Grenzfall s → ∞, Rückwärtsstreuung
(ϑ = π) dem Grenzfall s → 0.
1.7.7
Wirkungsquerschnitt
Die Teilchen eines Teilchenstrahls können durch Stöße mit einem anderen Teilchen
abgelenkt und als Funktion des Ablenkwinkels mit einem Detektor nachgewiesen
werden. Diesen Vorgang nennt man Streuung. Wir betrachten hier die Streuung
eines Teilchenstrahls an einem festen Streuzentrum.
Theoretische Physik I, SS 05, H.-J. Kull
39
Abbildung 1.21: Streuung von
Teilchen aus dem Flächenelement
dσ = sdsdϕ in das Raumwinkelelement dΩ = sin ϑdϑdϕ.
Zur Definition des Wirkungsquerschnittes betrachte man einen Strahl monoenergetischer Teilchen, die von einem Streuzentrum in ein Raumwinkelelement gestreut
werden (Abb. 1.21). Der Abstand der Bahn des ungestörten Teilchens vom Streuzentrum wird als Stoßparameter s bezeichnet. Teilchen, die durch den Kreisring
zwischen s und s + ds hindurchtreten werden um einen Winkel zwischen ϑ und
ϑ + dϑ abgelenkt.
Einfallender Teilchenstrom: Die Anzahl der Teilchen, die pro Zeiteinheit durch
die Fläche dσ hindurchtreten, sei
dIein = jdσ;
dσ = s|dϕ||ds|
(1.89)
Die Fläche wird hierbei immer positiv gezählt.
Detektorfläche: Im Abstand R vom Streuzentrum werden die gestreuten Teilchen
mit einem Detektor nachgewiesen. Die Detektorfläche ist
dO = R2 sin ϑ|dϑ||dϕ| = R2 dΩ
(1.90)
Sie wird ebenfalls positiv gezählt.
Raumwinkelelement: Da die Fläche vom Abstand R abhängt, verwendet man
besser das Raumwinkelelement
dO
(1.91)
dΩ = 2 = sin ϑ|dϑ||dϕ|
R
Gestreuter Teilchenstrom: Sei Ṅ die Rate der Teilchen, die in den Raumwinkel
dΩ gestreut werden
dIaus = Ṅ dΩ = Ṅ sin ϑ|dϑ||dϕ|
(1.92)
Differentieller Wirkungsquerschnitt: Da bei der Streuung keine Teilchen absorbiert werden sollen, gilt die Bilanz
dIein = dIaus
jdσ = Ṅ dΩ
Ṅ
dσ
=
j
dΩ
Theoretische Physik I, SS 05, H.-J. Kull
40
Dieses Verhältnis bezeichnet den differentiellen Wirkungsquerschnitt und besitzt die
Dimension einer Fläche. Experimentell misst man das auf der linken Seite stehende
Verhältnis Ṅ /j. Theoretisch berechnet man die rechte Seite mit der aus der Bahnkurve resultierenden Funktion s = s(ϑ)
s|ds||dϕ|
s ds 1
dσ
s
.
=
=
=
dΩ
sin ϑ|dϑ||dϕ|
sin ϑ dϑ sin ϑ dϑ
ds
1.7.8
(1.93)
Streuung an harten Kugeln
Abbildung 1.22: Streuung eines Teilchens an
einer harten Kugel mit Radius a.
Ein Teilchen werde an einer harten Kugel mit Radius a gestreut (Abb. 1.22). Die
Beziehung zwischen dem Stoßparamter und dem Ablenkwinkel ergibt sich aus der
Abbildung zu
π−ϑ
ϑ
= a cos .
s = a sin ϕ0 = a sin
2
2
Damit kann der Differentielle Wirkungsquerschnitt wie folgt berechnet werden:
a
ϑ
ds = − sin dϑ
2
2
a cos ϑ2 a dσ
ϑ
a2
=−
− sin = ,
mit: sin ϑ2 cos ϑ2 = 12 sin ϑ.
(1.94)
dΩ
sin ϑ
2
2
4
Durch Integration über den Raumwinkel erhält man den totalen Wirkungsquerschnitt. Er entspricht hier der Querschnittsfläche der Kugel:
Z
σ=
dΩ
dσ
a2
=
· 4π = πa2 .
dΩ
4
(1.95)
Theoretische Physik I, SS 05, H.-J. Kull
1.7.9
41
Rutherfordscher Wirkungsquerschnitt
Bei der Coulomb-Streuung wird der Zusammenhang zwischen dem Ablenkwinkel
und dem Stoßparameter (Abb.1.23) durch die Formel (1.88) bestimmt. Damit ergibt
sich folgende Berechnung des Wirkungsquerschnittes.
Abbildung 1.23: Ablenkung eines Teilchens
um einen Winkel ϑ bei einem Stoß mit Stoßparameter s.
Ableitung ds/dϑ:
ds
|α| − 21 sin2 ϑ/2 − 12 cos2 ϑ/2
|α|
1
=
=−
2
2
dϑ
2E
4E sin ϑ/2
sin ϑ/2
Differentieller Wirkungsquerschnitt:
dσ
|α| cos ϑ/2 1
|α|
1
= −
;
−
2
dΩ
2E sin ϑ/2 sin ϑ
4E sin ϑ/2
α 2
1
.
=
4
4E
sin ϑ/2
sin ϑ = 2 sin
(1.96)
ϑ
ϑ
cos ,
2
2
(1.97)
Beispiel: Im Rutherfordschen Streuexperiment wurden α-Teilchen (Z1 = 2; E ≈
4 − 8M eV ) an Goldkernen (Z2 = 79) gestreut. Mit α = −Z1 Z2 e2 erhält man den
Rutherfordschen Wirkungsquerschnitt
dσ
=
dΩ
Z1 Z2 e2
4E
2
1
sin
4
ϑ
2
(1.98)
Wird der Rutherfordsche Wirkungsquerschnitt im Experiment gemessen, so kann
daraus geschlossen werden, dass die Streuzentren näherungsweise punktförmig sein
müssen. Der Kernradius ist also kleiner als der minimale Stoßparameter rmin ≈
30 . . . 60fm (1 fm = 10−15 m). Dadurch wurde das Rutherfordsche Atommodell
bestätigt: Die Masse des Atoms ist in einem Atomkern konzentriert, dessen Ausdehnung sehr viel kleiner ist als die der Elektronenhülle (rAtom ≈ 1Å, 1Å=10−10 m).
Theoretische Physik I, SS 05, H.-J. Kull
42
Totaler Wirkungsquerschnitt:
Z
σ=
dσ
dΩ
=
dΩ
Z2π
Zπ
dϕ
0
dσ
dϑ sin ϑ
= 2π
dΩ
0
Zπ
dϑ sin ϑ
dσ
dΩ
(1.99)
0
Wegen der unendlichen Reichweite der Coulombwechselwirkung divergiert der totale
Wirkungsquerschnitt. Man erhält einen endlichen Wirkungsquerschnitt, wenn man
die Abschirmung der Ladung durch die Atomhülle berücksichtigt.
1.8
Zweikörperproblem
Wir behandeln nun ein abgeschlossenes System aus zwei Massenpunkten, die miteinander wechselwirken. Dieses Zweikörperproblem kann mit Hilfe des Impulserhaltungssatzes auf ein Einkörperproblem zurückgeführt werden.
Die Bewegungsgleichungen der beiden Teilchen besitzen die Form
m1 r̈ 1 = F 12 ,
m2 r̈ 2 = F 21 .
(1.100)
Die Wechselwirkungskräfte sollen nur vom Abstand der Teilchen abhängen und das
Gesetz von actio=reactio erfüllen:
F 12 = F 12 (|r 1 − r 2 |),
1.8.1
F 12 = −F 21 .
(1.101)
Schwerpunkts- und Relativkoordinaten
Das Gleichungssystem (1.100) kann durch die Einführung von Schwerpunkts- und
Relativkoordinaten entkoppelt werden. Die Koordinatentransformation und ihre
Umkehrtransformation werden durch die Vektorgleichungen
R=
1
(m1 r 1 + m2 r 2 ) ,
M
r1 = R −
µ
r,
m1
r = r2 − r1
r2 = R +
mit
µ
r,
m2
(1.102)
(1.103)
m1 m2
m1 + m2
definiert. Man bezeichnet µ als die reduzierte Masse. Bei stark unterschiedlichen
Massen entspricht die reduzierte Masse näherungsweise der kleineren Masse, d.h.
M = m1 + m2 ,
µ=
Theoretische Physik I, SS 05, H.-J. Kull
43
Abbildung 1.24:
Laborsystem und
Schwerpunktssystem.
µ ≈ m2 für m2 m1 . Bei gleichen Massen gilt m1 = m2 = 2µ, d.h. µ ist gegenüber
den Massen m1,2 um den Faktor 1/2 reduziert.
Der Relativvektor r ist vom Massenpunkt r 1 zum Massenpunkt r 2 gerichtet. Die
Ortsvektoren im Schwerpunktssystem sind
µ
µ
r,
r 02 =
r.
m1
m2
Für die Impulse der Massenpunkte gilt die Transformation
r 01 = −
p1 = m1 V − µv,
p2 = m2 V + µv,
(1.104)
mit
V = Ṙ,
1.8.2
v = ṙ.
Schwerpunkts- und Relativbewegung
Durch die Addition der beiden Bewegungsgleichungen in (1.100) ergibt sich die Bewegungsgleichung für den Schwerpunkt:
m1 r̈ 1 + m2 r̈ 2 = M V̇ = F 12 + F 21 = 0
(1.105)
Da die Gesamtkraft verschwindet, ist der Gesamtimpuls erhalten und der Schwerpunkt bewegt sich mit konstanter Geschwindigkeit.
Theoretische Physik I, SS 05, H.-J. Kull
V = V 0 = const,
44
R = R0 + V 0 t.
(1.106)
Für die Relativbewegung erhält man mit (1.104) und (1.106) die Bewegungsgleichung
(1.107)
ṗ2 = µr̈ = F 21 (r)
Hierbei handelt es sich um ein Einkörperproblem für ein fiktives Teilchen mit der
reduzierten Masse µ und dem Ortsvektor r unter Einwirkung der Kraft F 21 (r).
Schwerpunktsystem (SS): Ein Bezugssystem in dem der Schwerpunkt im Koordinatenursprung ruht, R = V = 0, wird Schwerpunktsystem genannt. Für die
Teilchenbewegung im SS gilt:
r 1 (t) = −
µ
r(t),
m1
r 2 (t) =
µ
r(t)
m2
(1.108)
p1 = −µv,
p2 = µv.
Die Impulse der beiden Teilchen sind entgegengesetzt gerichtet und betragsmäßig
gleich groß.
1.8.3
Elastische Stöße
Bei elastischen Stößen zweier Massen m1 und m2 gelten die Erhaltungssätze für
Energie und Impuls. Die Geschwindigkeiten der Teilchen vor dem Stoß seien v1 und
v2 . Ziel ist die Bestimmung der Geschwindigkeiten nach dem Stoß v10 und v20 . Aufgrund der Erhaltungssätze besteht das Ergebnis des Stoßes im Schwerpunktsystem
in einer Drehung der Richtung der Relativgeschwindigkeit um den Ablenkwinkel ϑ.
Die Geschwindigkeiten nach dem Stoß sind daher durch die Transformationsgesetze
zwischen Labor- und Schwerpunktssystem und den Ablenkwinkel bestimmbar.
Impulserhaltung: Aufgrund der Impulserhaltung kann sich beim Stoß nur die
Relativgeschwindigkeit ändern. Die Schwerpunktgeschwindigkeit bleibt erhalten:
V = V 0.
(1.109)
Der Strich kennzeichnet Größen nach dem Stoß. Im Schwerpunktsystem verschwindet der Gesamtimpuls vor und nach dem Stoß:
P = µv − µv = 0,
P 0 = µv 0 − µv 0 = 0.
(1.110)
Theoretische Physik I, SS 05, H.-J. Kull
45
Energieerhaltung: Aufgrund der Energieerhaltung kann sich beim Stoß nur die
Richtung der Relativgeschwindigkeit ändern. Die Relativgeschwindigkeit vor dem
Stoß sei v = vt, nach dem Stoß v 0 = v 0 t0 mit Einheitsvektoren t bzw. t0 in Richtung
der Relativgeschwindigkeit. Im Schwerpunktssystem lautet der Energieerhaltungssatz
µv 0 2
µv 2
,
E0 =
.
(1.111)
E = E 0,
E=
2
2
Daraus folgt, dass der Betrag der Relativgeschwindigkeit erhalten ist,
v = v0.
Der noch unbestimmte Winkel zwischen t und t0 wird als Ablenkwinkel ϑ bezeichnet
und hängt vom speziellen Wechselwirkungsgesetz ab.
Die Geschwindigkeiten nach dem Stoß sind im Schwerpunktssystem
v 01 = −
µ
vt0 ,
m1
v 02 =
µ
vt0 ,
m2
(1.112)
und im Laborsystem
v 01,L = V −
µ
vt0 ,
m1
v 02,L = V +
µ
vt0 .
m2
(1.113)
Kapitel 2
Lagrangesche Mechanik
Die Behandlung von Systemen von Massenpunkten mit Zwangsbedingungen erfordert eine Erweiterung der Newtonschen Mechanik. Die Einführung von Zwangskräften führt zu den Lagrangegleichungen erster Art, die von generalisierten Koordinaten zu den Lagrangegleichungen zweiter Art.
2.1
2.1.1
Systeme mit Zwangsbedingungen
Zwangsbedingungen
Ein System aus N freien Massenpunkten besitzt 3N Freiheitsgrade. Diese entsprechen den Lagekoordinaten der Massenpunkte im dreidimensionalen Raum. Ist ein
Massenpunkt Teil eines mechanischen Systems, so kann die Zahl seiner Freiheitsgrade durch äußere Vorgaben eingeschränkt sein. Beim ebenen Pendel bewegt sich die
Masse auf einer Kreisbahn und besitzt daher nur noch einen Freiheitsgrad. Bedingungen, die die Zahl der Freiheitsgrade einschränken, werden Zwangsbedingungen
genannt.
Physikalische Systeme mit Zwangsbedingungen sind in der Technik sehr verbreitet.
Bei mechanischen Maschinen werden die beweglichen Teile, wie Kolben und Räder,
so geführt, dass meist schon ein Freiheitsgrad ausreicht um deren Stellung anzugeben.
Die Reduktion der Anzahl der Freiheitsgrade auf wenige relevante Freiheitsgrade ist
von prinzipieller Bedeutung. Viele Probleme werden erst auf diese Weise behandelbar. Ein starrer Körper besteht z.B. aus unendlich vielen Massenpunkten. Da wir
aber wissen, dass die Abstände zwischen den Massenpunkten bei der Bewegung fest
bleiben, reduziert sich das Problem auf eine Bewegung mit den sechs Freiheitsgraden
der Translation und Rotation.
Die folgenden Beispiele zeigen einige typische Zwangsbedingungen:
46
Theoretische Physik I, SS 05, H.-J. Kull
• Massenpunkt mit Ortsvektor r auf einer Ebene mit Normalenvektor n:
n · r = 0.
• Massenpunkt mit Ortsvektor r auf
oder oberhalb einer Ebene mit Normalenvektor n:
n·r≥0
• Massenpunkt auf der Oberfläche einer
Kugel mit Radius R:
r−R=0
• Starr verbundene Massenpunkte mit
Abständen rij :
2
(r i − r j )2 − rij
=0
• Massenpunkt auf rotierender Stange
mit Richtung e(t).
r × e(t) = 0
47
Theoretische Physik I, SS 05, H.-J. Kull
48
• Mittelpunkt des rollenden Rades:
ẋ − Rϕ̇ = 0,
2.1.2
z−R=0
Zwangskräfte
Zwangsbedingungen führen zu einer Erweiterung der Newtonschen Mechanik. Um
die Zwangsbedingungen erfüllen zu können, werden in den Bewegungsgleichungen
zusätzliche Kräfte eingeführt. Diese Kräfte werden als Zwangskräfte bezeichnet.
Die Bewegungsgleichung eines Massenpunktes mit einer Zwangskraft Z lautet
mr̈ = F + Z.
Die Rolle der Zwangskraft soll zuerst an dem folgenden Beispiel illustriert werden.
Schiefe Ebene
Abbildung 2.1: Schiefe Ebene mit Schwerkraft G und
Zwangskraft Z.
Ein Massenpunkt bewege sich unter Einwirkung der Schwerkraft G = −mgez auf
einer um den Winkel α geneigten schiefen Ebene (Abb.2.1). In einem um den Winkel
α gedrehten Inertialsystem S 0 lauten die Bewegungsgleichungen
mẍ0 = −mg sin α + Zx0
mz̈ 0 = −mg cos α + Zz0
(2.1)
Theoretische Physik I, SS 05, H.-J. Kull
49
Um die Zwangsbedingung z 0 = 0 zu erfüllen, kann die Zwangskraft
Zx0 = 0,
Zz0 = mg cos α .
gewählt werden. Dabei ist die Normalenkomponente Zz0 eindeutig durch die Zwangsbedingung bestimmt. Die Tangentialkomponente wird zu Null gewählt, da in dieser
Richtung keine Zwangsbedingung vorliegt. Die Zwangskraft kompensiert hier gerade
die Komponente der Schwerkraft in Richtung der Flächennormale.
2.2
2.2.1
Lagrangegleichungen erster Art
Konfigurationsraum
Für ein System von N Massenpunkten wird die Lage der N Massen durch 3N
Koordinaten festgelegt. Eine gegebene Konfiguration kann daher durch einen Punkt
in einem 3N -dimensionalen Raum, dem Konfigurationsraum, angegeben werden. Im
Konfigurationsraum werden der Ortsvektor x, die Kraft F und die Zwangskraft Z
in folgender Weise definiert
x1
Fx,1
Zx,1
y1
Fy,1
Zy,1
z1
Fz,1
Zz,1
x2
Fx,2
Zx,2
y2
Fy,2
Zy,2
x=
F =
Z=
(2.2)
z2 ,
Fz,2 ,
Zz,2 .
···
···
···
xN
Fx,N
Zx,N
yN
Fy,N
Zy,N
zN
Fz,N
Zz,N
Außerdem sei m eine 3N × 3N -Diagonalmatrix, die durch die Massen M1 , · · · , MN
der Massenpunkte auf folgende Weise definiert ist,
M1 0 · · ·
0 M1 0 · · ·
· · · 0 M1 0 · · ·
·
·
·
0
M
0
·
·
·
2
·
·
·
0
M
0
2
.
m=
(2.3)
· · · 0 M2
···
MN
0
···
0 MN
0
···
0 MN
Theoretische Physik I, SS 05, H.-J. Kull
50
Mit dieser Notation lauten die Bewegungsgleichungen der Massenpunkte in Vektorund Koordinatenform
m · ẍ = F + Z
⇐⇒
mi ẍi = Fi + Zi ,
i = 1, · · · , 3N .
(2.4)
wobei mi das i-te Diagonalelement von m bezeichnet.
2.2.2
Holonome Zwangsbedingungen
Unter holonomen Zwangsbedingungen versteht man Zwangsbedingungen, die sich
in Form einer Gleichung zwischen den Lagekoordinaten und eventuell der Zeit ausdrücken lassen. Im allgemeinen wird die Bewegung eines Systems durch mehrere
holonome Zwangsbedingungen eingeschränkt,
g l (x, t) = 0,
l = 1, 2, 3, · · · , k.
(2.5)
Hierbei ist k die Anzahl der Zwangsbedingungen und l ist ein Index für die unterschiedlichen Zwangsbedingungen. Zeitabhängige Zwangsbedingungen, g = g(x, t),
heißen rheonom, zeitunabhängige, g = g(x), skleronom. Im folgenden werden k holonome Zwangsbedingungen vorausgesetzt.
Hyperflächennormale und virtuelle Verrückungen
Eine holonome Zwangsbedingung definiert eine Hyperfläche im Konfigurationsraum.
Eine virtuelle Verrückung bezeichnet eine infinitesimale Verschiebung δx eines Punktes auf einer momentanen Hyperfläche, die zu einer festen Zeit t = t0 vorliegt.
Virtuelle Verrückungen müssen von den tatsächlichen Verschiebungen dx der Massenpunkte in einem Zeitintervall dt unterschieden werden, da sich in dieser Zeit die
Zwangsbedingungen ändern können. Für virtuelle Verrückungen gilt
l
l
g (x + δx, t0 ) − g (x, t0 ) =
3N
X
∂g l (x, t0 )
i=1
∂xi
δxi = 0
(2.6)
da sowohl x + δx als auch x auf der Hyperfläche liegen. Der Gradient
Al (x, t) =
∂g l (x, t0 )
.
∂x
(2.7)
bzw. in Komponentenschreibweise
∂g l (x, t0 )
=
,
∂xi
ist orthogonal zu beliebigen virtuellen Verschiebungen. Er definiert daher die Richtung der Hyperflächennormalen.
Ali (x, t)
Theoretische Physik I, SS 05, H.-J. Kull
51
Abbildung 2.2: Hyperfläche mit Normale und
virtueller Verrückung.
2.2.3
D’Alembertsches Prinzip
Das d’Alembertsche Prinzip ist ein Postulat über die Richtung der Zwangskraft:
Z · δx =
3N
X
Zi δxi = 0.
(2.8)
i=1
Die Zwangskraft ist orthogonal zu beliebigen virtuellen Verrückungen. Man sagt
auch, die Zwangskräfte leisten keine virtuelle Arbeit. Hierbei ist aber zu beachten, dass die virtuelle Arbeit i.a. nicht die tatsächliche Arbeit darstellt. Das
d’Alembertsche Prinzip definiert die Zwangskräfte. Daneben können in realen physikalischen Systemen auch andere Kräfte, wie z.B. Reibungskräfte, durch den Kontakt
mit Führungselementen hervorgerufen werden.
Eine alternative Formulierung des d’Alembertschen Prinzips erhält man, indem man
die Zwangskräfte mit Hilfe der Bewegungsgleichung eliminiert,
(F − m · ẍ) · δx = 0.
(2.9)
Ein Spezialfall des d’Alembertschen Prinzips ist das Prinzip der virtuellen Arbeit.
Für ein Kräftegleichgewicht, bei dem alle Koordinaten zeitunabhängig sind, gilt die
Gleichgewichtsbedingung,
F · δx = 0.
Im Gleichgewicht leisten die Kräfte keine virtuelle Arbeit.
(2.10)
Theoretische Physik I, SS 05, H.-J. Kull
52
Als Beispiel für das Prinzip der virtuellen Arbeit betrachten wir das Gleichgewicht
eines Hebels (Abb.2.3). Die virtuellen Verrückungen der Massen m1,2 bei einer Drehung um den vektoriellen Drehwinkel δϕ sind jeweils δr 1,2 = δϕ×r 1,2 . Aus dem
Prinzip der virtuellen Arbeit folgt
F 1 ·(δϕ×r 1 ) + F 2 ·(δϕ×r 2 ) = δϕ·(r 1 ×F 1 + r 2 ×F 2 ) = 0.
Der Hebel ist im Gleichgewicht, wenn sich die Drehmomente in Richtung der Drehachse zu Null addieren.
Abbildung
2.3:
Virtuelle
Verrückungen
eines
Hebels
aus der Gleichgewichtslage.
2.2.4
Bewegungsgleichungen mit Zwangskräften
Mit Mitteln der Variationsrechnung kann man aus dem d’Alembertschen Prinzip die
Bewegungsgleichungen mit Zwangskräften herleiten. Wir wollen diese hier lediglich
angeben. Für jede Zwangsbedingung kann man die zugehörige Zwangskraft in der
Form
Z l = λ l Al
(2.11)
mit (2.7) und noch unbestimmten Funktionen λl (t) ansetzen. Dieser Ansatz erfüllt
das d’Alembertsche Prinzip, da die virtuellen Verrückungen definitionsgemäß den
Bedingungen
Al · δx = 0,
l = 1, 2, · · · , k
genügen. Das zugehörige Gleichungssystem nennt man die Lagrangegleichungen erster Art,
m · ẍ = F + Z,
Z=
k
X
λ l Al ,
g l (x, t) = 0.
l=1
Dies sind 3N + k Gleichungen für 3N Koordinaten xi und k Parameter λl .
(2.12)
Theoretische Physik I, SS 05, H.-J. Kull
2.3
53
Lagrangegleichungen zweiter Art
Für Systeme mit holonomen Zwangsbedingungen,
mi ẍi = Fi + Zi ,
g l (x, t) = 0,
i = 1, 2, · · · , 3N
l = 1, 2, · · · , k .
können die Zwangskräfte durch eine geeignete Koordinatenwahl eliminiert werden.
Dies führt zu den Lagrangegleichungen zweiter Art.
2.3.1
Generalisierte Koordinaten
Die Zwangsbedingungen bestimmten zu jedem Zeitpunkt eine Hyperfläche im Konfigurationsraum. Auf dieser Hyperfläche können geeignete, i.a. krummlinige, Koordinaten q1 , q2 , · · · , qn , · · · , qf gewählt werden, wobei f die Dimension der Hyperfläche bezeichnet. Solche Koordinaten werden als generalisierte oder verallgemeinerte Koordinaten bezeichnet. Generalisierte Koordinaten auf einer Kugel sind z.B.
die Winkel ϕ, ϑ der Kugelkoordinaten. Die Koordinatentransformation zwischen den
generalisierten Koordinaten und den kartesischen Koordinaten besitzt die Form
xi = xi (q1 , q2 , · · · , qf , t),
i = 1, 2, · · · , 3N
(2.13)
Abkürzend verwenden wir auch die Notation x = x(q, t), wobei q für die Argumente
q1 , q2 , · · · , qf steht.
2.3.2
D’Alembertsches Prinzip in generalisierten Koordinaten
Der Ortsvektor auf der momentanen Hyperfläche wird durch (2.13) dargestellt. Eine virtuelle Verrückung ist definitionsgemäß eine infinitesimale Verschiebung dieses
Ortsvektors bei festgehaltener Zeit. Dafür erhalten wir durch Differentiation,
f
X
∂xi
δxi =
δqn .
∂qn
n=1
(2.14)
Die Verrückungen δq auf der Hyperfläche unterliegen keinen Einschränkungen mehr.
Die Vektoren
∂x
an =
,
n = 1, · · · , f
(2.15)
∂qn
bilden in jedem Punkt der Hyperfläche eine lokale Basis (Abb.2.4). Hierbei ist an
ein Tangentenvektor an die qn -Koordinate.
Theoretische Physik I, SS 05, H.-J. Kull
54
Abbildung 2.4: Generalisierte
Koordinaten und lokale Basis auf
der Hyperfläche.
Mit (2.14), (2.15) lautet das d’Alembertsche Prinzip (2.9),
X
(m · ẍ − F ) · an δqn = 0.
(2.16)
n
Da die δqn unabhängig voneinander beliebig gewählt werden können, muß jeder
Koeffizient einzeln verschwinden,
(m · ẍ − F ) · an = 0,
n = 1, · · · , f.
(2.17)
Dies sind die Komponenten der Bewegungsgleichung entlang der lokalen Basis. Damit wurden genau f Bewegungsgleichungen für die f Freiheitsgrade der Hyperfläche
gewonnen. Die Zwangskräfte wurden durch die Koordinatenwahl eliminert.
2.3.3
Generalisierte Geschwindigkeiten
In den Bewegungsgleichungen (2.17) müssen x und ẍ durch die generalisierten Koordinaten q ausgedrückt werden.
Für die Geschwindigkeit erhält man aus (2.14) das Transformationsgesetz
ẋ =
f
X
∂x(q, t)
n=1
∂qn
q̇n +
∂x(q, t)
= v(q, q̇, t)
∂t
(2.18)
Man bezeichnet q̇ = (q̇1 , · · · , q̇f ) als generalisierte Geschwindigkeiten und behandelt
in der Transformationsgleichung (2.18) q, q̇, und t als unabhängige Variablen. Dann
Theoretische Physik I, SS 05, H.-J. Kull
55
gilt
∂x
∂v
=
∂ q̇n
∂qn
f
X
d ∂x
∂2x
∂2x
∂v
=
q̇m +
=
.
dt ∂qn
∂q
∂q
∂t∂q
∂q
m
n
n
n
m=1
(2.19)
(2.20)
Der Beschleunigungsterm in der Bewegungsgleichung läßt sich damit wie folgt umformen
X d X
∂xi
d ∂xi
∂xi
=
mi vi
− mi vi
mi ẍi
∂qn
dt
∂qn
dt ∂qn
i
i
X d
∂vi
∂vi
=
mi vi
− mi vi
dt
∂
q̇
∂qn
n
i
d ∂T
∂T
=
−
.
(2.21)
dt ∂ q̇n
∂qn
Hierbei bezeichnet
T (q, q̇, t) =
X1
i
2
mi vi (q, q̇, t)2
die kinetische Energie des Systems als Funktion der generalisierten Koordinaten und
Geschwindigkeiten.
2.3.4
Generalisierte Kraft
Der Kraftterm in der Bewegungsgleichung wird als generalisierte Kraft,
Qn (q, q̇, t) = F · an
(2.22)
bezeichnet. Damit lauten die auf generalisierte Koordinaten transformierten Bewegungsgleichungen
d
dt
2.3.5
∂T
∂ q̇n
−
∂T
= Qn .
∂qn
Generalisiertes Potential
Falls die Kraft F aus einem Potential U (x) abgeleitet werden kann,
F =−
∂U
,
∂x
(2.23)
Theoretische Physik I, SS 05, H.-J. Kull
56
so gilt dies auch für die generalisierte Kraft,
Qn (q, q̇, t) = F · an = −
∂U (x) ∂x
∂U (x(q, t))
·
=−
.
∂x
∂qn
∂qn
(2.24)
Allgemeiner nennt man eine Funktion U (q, q̇, t) ein generalisierte Potential, falls die
generalisierte Kraft in der Form
d
Qn =
dt
∂U
∂ q̇n
−
∂U
∂qn
(2.25)
darstellbar ist. Das geschwindigkeitunabhängige Potential (2.24) ist ein Spezialfall
hiervon.
2.3.6
Lagrangegleichungen zweiter Art
Existiert ein Potential, so können die kinetische und die potentielle Energie in der
Bewegungsgleichung (2.23) zusammengefasst werden,
d ∂T
∂T
−
− Qn
dt ∂ q̇n
∂qn
d ∂T
d ∂U
∂T
∂U
=
−
−
−
dt ∂ q̇n
∂qn dt ∂ q̇n
∂qn
∂(T − U )
d ∂(T − U )
−
.
=
dt
∂ q̇n
∂qn
Damit erhält man aus (2.23)
d
dt
∂L
∂ q̇n
=
∂L
,
∂qn
n = 1, · · · , f,
(2.26)
mit
L(q, q̇, t) = T (q, q̇, t) − U (q, q̇, t).
Man nennt L(q, q̇, t) die Lagrangefunktion und (2.26) die Lagrangegleichungen zweiter Art. Dies ist ein System von f Differentialgleichungen zweiter Ordnung für die
Bewegung q(t) auf der Hyperfläche. Es ist im allgemeinen einfacher zu behandeln
als die 3N + k gekoppelten Lagrangegleichungen erster Art.
Theoretische Physik I, SS 05, H.-J. Kull
2.3.7
57
Lösungsverfahren
Ein mechanisches System mit holonomen Zwangsbedingungen wird damit
vollständig durch die Wahl der verallgemeinerten Koordinaten q, durch Anfangsbedingungen (q0 , q̇0 ) und durch die Angabe der Lagrangefunktion L(q, q̇, t) in diesen
Koordinaten beschrieben. Dabei ist die Form der Gleichungen von der Koordinatenwahl unabhängig.
Das Verfahren zur Lösung eines mechanischen Problems mit den Lagrangegleichungen zweiter Art besteht aus den folgenden Teilschritten:
1. Angabe der holonomen Zwangsbedingungen
2. Wahl der generalisierten Koordinaten: q
3. Bestimmung der Koordinatentransformation: x = x(q, t)
4. Aufstellen der Lagrangefunktion. Hierzu müssen T und U als Funktion von q,
q̇ und t angegeben werden.
5. Herleitung der Bewegungsgleichungen aus den Lagrangegleichungen
6. Lösung der Bewegungsgleichungen
7. Bestimmung der Integrationskonstanten durch Anfangsbedingungen
2.3.8
Massenpunkt auf schiefer Ebene
Ein einfaches Beispiel ist die Bewegung eines Massenpunktes auf einer schiefen Ebene
mit Neigungswinkel α im Schwerefeld (Abb.2.1). Verwendet man Polarkoordinaten
(r, ϕ), so ist der Winkel durch die Zwangsbedingung, ϕ − α = 0 festgelegt. Der
Radius kann als verallgemeinerte Koordinate q = r gewählt werden. Die Koordinatentransformation lautet
x = r cos α,
z = r sin α .
Durch Ableitung erhält man die Geschwindigkeiten
ẋ = ṙ cos α,
ż = ṙ sin α
und damit die kinetische Energie
1
1
1
T = m(ẋ2 + ż 2 ) = mṙ2 (cos2 α + sin2 α) = mṙ2 .
2
2
2
Die potentielle Energie ist
U = mgz = mgr sin α.
Theoretische Physik I, SS 05, H.-J. Kull
58
Die Lagrangefunktion besitzt damit die Form
1
L(r, ṙ) = T − U = mṙ2 − mgr sin α.
2
Mit den partiellen Ableitungen
∂L
= mṙ,
∂ ṙ
∂L
= −mg sin α,
∂r
folgt aus (2.26) die Bewegungsgleichung
mr̈ = −mg sin α .
Dasselbe Ergebnis hatten wir in (2.1) mit der Newtonschen Bewegungsgleichung
abgeleitet. Die dort benötigte Zwangskraft tritt jetzt nicht mehr in Erscheinung.
2.3.9
Zyklische Koordinaten und generalisierte Impulse
Analog zur Impulserhaltung in der Newtonschen Mechanik folgt aus den Lagrangegleichungen (2.26) der Erhaltungssatz
∂L
=0
∂qn
=⇒
pn =
∂L
= const.
∂ q̇n
(2.27)
Man bezeichnet die Größe
pn =
∂L
∂ q̇n
(2.28)
als generalisierten Impuls. Hängt die Lagrangefunktion nicht explizit von einer generalisierten Koordinate qn ab, so nennt man diese Koordinate zyklisch. Für jede
zyklische Variable ist der zugehörige generalisierte Impuls erhalten.
2.3.10
Energieerhaltung
Der Energieerhaltungssatz kann in der Lagrangemechanik in der folgenden Form
angegeben werden
∂L
=0
∂t
=⇒
E=
X
n
pn q̇n − L = const.
(2.29)
Theoretische Physik I, SS 05, H.-J. Kull
59
Ist die Lagrangefunktion nicht explizit zeitabhängig, so ist die Energie E erhalten.
Beweis: Differenziert man L(q, q̇, t) nach der Zeit und verwendet die Lagrangegleichungen (2.26), so folgt
X ∂L
d
∂L
∂L
L(q, q̇, t) =
q̇n +
q̈n +
dt
∂qn
∂ q̇n
∂t
n
X
∂L
=
ṗn q̇n + pn q̈n +
∂t
n
!
∂L
d X
pn q̇n +
.
=
dt
∂t
n
Damit gilt
!
d
dt
X
pn q̇n − L
=−
n
∂L
.
∂t
(2.30)
Die Zwangsbedingungen seien nun skleronom und die potentielle Energie sei geschwindigkeitsunabhängig. Dann gilt für die Energie die übliche Beziehung
E=
X
pn q̇n − L = T + U.
(2.31)
n
Beweis: Für skleronome Zwangsbedingungen ist die Koordinatentransformation
x = x(q) zeitunabhängig. Mit (2.14) und (2.15) lauten die entsprechenden Transformationen für die Geschwindigkeit und die kinetische Energie,
X ∂x
q̇n
∂q
n
n
1X
T =
µnm q̇n q̇m ,
2 n,m
v =
mit
µnm (q) =
X
i
mi
(2.32)
(2.33)
∂xi ∂xi
.
∂qn ∂qm
Die kinetische Energie ist eine positiv definite quadratische Form mit einer symmetrischen Matrix µnm = µmn . Für geschwindigkeitsunabhängige Potentiale werden
die verallgemeinerten Impulse allein durch die kinetische Energie bestimmt
pn =
∂L
∂T
=
.
∂ q̇n
∂ q̇n
(2.34)
Theoretische Physik I, SS 05, H.-J. Kull
60
Die Differentiation ergibt
1X
µnm (δnk q̇m + q̇n δkm )
2 n,m
1X
1X
=
µkm q̇m +
µnk q̇n
2 m
2 n
X
1X
=
(µkm + µmk )q̇m =
µkm q̇m .
2 m
m
pk =
Damit erhält man die Gesamtenergie
X
E=
pk q̇k − L = 2T − (T − U ) = T + U.
(2.35)
(2.36)
k
2.4
Schwingungen
Einfache schwingungsfähige Systeme sind ein mathematisches Pendel oder eine elastische Feder. Im allgemeinen treten Schwingungen in konservativen mechanischen
Systemen dann auf, wenn man eine stabile Gleichgewichtslage etwas stört. Eindimensionale Schwingungen mit kleinen Auslenkungen werden durch das Modell des
harmonischen Oszillators beschrieben. Kleine Schwingungen von Systemen mit vielen Freiheitsgraden können als Überlagerung der Schwingungen unabhängiger harmonischer Oszillatoren dargestellt werden.
2.4.1
Mathematisches Pendel
Ein mathematische Pendel besteht aus einem Massenpunkt m am unteren Ende
einer masselosen Stange der Länge l, deren oberes Ende drehbar aufgehängt ist. Die
Drehachse sei parallel zur y Achse, die Schwerebeschleunigung g in Richtung der
negativen z-Achse gerichtet (Abb.2.5).
Die Bewegung des Pendels wird durch die Zwangsbedingungen y = 0 und r − l =
0 auf eine Bewegung auf einer Kreisbahn eingeschränkt. Es handelt sich also um
ein Beispiel mit holonomen Zwangsbedingungen, das noch einmal die Methode zur
Aufstellung der Lagrangegleichungen 2.Art verdeutlicht.
Zur Angabe der Lage des Massenpunktes auf dem Kreis genügt ein Winkel ϕ, der
ausgehend von der unteren Gleichgewichtslage gezählt und als verallgemeinerte Koordinate gewählt wird. Die kartesischen Koordinaten der Punkte auf dem Kreis
können einfach durch den Winkel ausgedrückt werden,
x = l sin ϕ,
z = −l cos ϕ .
Theoretische Physik I, SS 05, H.-J. Kull
61
z
x
l
Abbildung 2.5: Koordinaten für das Pendel.
Da die Pendellänge l konstant ist, erhält man für die Geschwindigkeitskomponenten
ẋ = lϕ̇ cos ϕ,
ż = lϕ̇ sin ϕ .
Zur Aufstellung der Lagrangefunktion benötigt man die kinetische und die potentielle Energie als Funktion der verallgemeinerten Koordinate ϕ und der verallgemeinerten Geschwindigkeit ϕ̇,
1
1
m(ẋ2 + ż 2 ) = ml2 ϕ̇2
2
2
= mgz = −mgl cos ϕ .
T =
V
Damit erhält man die Lagrangefunktion
1
L(ϕ, ϕ̇) = T − V = ml2 ϕ̇2 + mgl cos ϕ .
2
Mit
∂L
= ml2 ϕ̇,
∂ ϕ̇
(2.37)
∂L
= −mgl sin ϕ
∂ϕ
erhält man aus der Lagrangegleichung
d ∂L
∂L
=
dt ∂ ϕ̇
∂ϕ
die Bewegungsgleichung des mathematischen Pendels
ϕ̈ +
g
sin ϕ = 0 .
l
(2.38)
Theoretische Physik I, SS 05, H.-J. Kull
62
Dies ist eine eindimensionale Bewegungsgleichung, wie sie bereits in Abschnitt
(1.5.3) behandelt wurde. Ein erstes Integral liefert der Energieerhaltungssatz (2.29),
1
∂L
ϕ̇ − L(ϕ, ϕ̇) = ml2 ϕ̇2 − mgl cos ϕ
(2.39)
E=
∂ ϕ̇
2
Die Bahnen lassen sich durch die Energiewerte klassifizieren. Das Potential besitzt
Minima bei ϕ = 2πn mit der Energie E = −mgl und Maxima bei ϕ = π + 2πn
mit der Energie E = +mgl. Diese entsprechen der unteren und der oberen Gleichgewichtslage des Pendels. Im Intervall −mgl < E < +mgl schwingt das Pendel um
die untere Ruhelage. Wählt man den Winkel im Intervall −π < ϕ < +π, so verläuft
die Bewegung zwischen zwei Umkehrpunkten, −ϕmax < ϕ < ϕmax mit ϕmax < π.
Für E > mgl gibt es keine Umkehrpunkte. Der Winkel nimmt monoton zu oder ab.
In diesem Fall dreht sich das Pendel im gleichen Drehsinn um die y-Achse.
Der Energiesatz bestimmt die Winkelgeschwindigkeit als Funktion des Winkels,
r
g
2E
+ 2 cos ϕ
(2.40)
ϕ̇ = ±
2
ml
l
Damit kann die Lösung des Pendelproblems als Integral angegeben werden
Zϕ(t)
t=
dϕ
.
ϕ̇
(2.41)
ϕ(0)
Im allgemeinen lässt sich dieses Integral nicht durch elementare Funktionen ausdrücken.
Für kleine Auslenkungen aus der unteren Gleichgewichtslage kann man zu einer
einfacheren linearen Schwingungsgleichung übergehen. Setzt man in (2.38) sin ϕ ≈ ϕ
für ϕ << 1, so erhält man die Schwingungsgleichung
ϕ̈ +
g
ϕ=0.
l
(2.42)
Die allgemeine Lösung von (2.42) lautet
r
ϕ(t) = a cos(ωt − α),
ω=
g
l
mit beliebigen Integrationskonstanten a und α. Die Schwingungsperiode
s
2π
l
T =
= 2π
ω
g
(2.43)
(2.44)
hängt in einem vorgegebenen Schwerefeld nur von der Pendellänge ab. Charakteristisch für lineare Schwingungen ist die Unabhängigkeit der Schwingungsperiode von
der Amplitude der Schwingung.
Theoretische Physik I, SS 05, H.-J. Kull
2.4.2
63
Harmonischer Oszillator
Ein harmonischer Oszillator führt harmonische Schwingungen aus, die durch die
Kreisfunktionen Sinus und Kosinus beschriebenen werden. Physikalisch wird der
harmonische Oszillator in guter Näherung durch eine an einer elastischen Feder aufgehängte Masse realisiert. Ein Pendel, das mit kleinen Auslenkungen schwingt, ist
ebenfalls ein harmonischer Oszillator. Es gibt viele weitere physikalische Anwendungen, da das Modell allgemeine Eigenschaften eines Systems in der Nähe eines
Gleichgewichts beschreibt.
Ein Massenpunkt bewege sich in x-Richtung in einem beliebigen Potential U (x), das
bei x = x0 ein Minimum besitzt. Ohne Einschränkung kann man U (x0 ) = 0 wählen,
da das Potential nur bis auf eine Konstante eindeutig bestimmt ist. Im Minimum
gilt außerdem,
d2 U dU = 0,
k=
> 0.
(2.45)
dx x0 =0
dx2 x=x0
Die Schwingungsgleichung des harmonischen Oszillators erhält man, indem man die
Lagrangefunktion bis zur zweiten Ordnung in der Auslenkung ξ = x − x0 entwickelt.
Für das Potential lautet diese Entwicklung
1 d2 U 1 2
dU 2
ξ
+
kξ .
(2.46)
ξ
=
U = U (0) +
dx x=0
2 dx2 x=0
2
Die kinetische Energie ist wegen ẋ = ξ˙ von quadratischer Ordnung,
1
1
T = mẋ2 = mξ˙2 .
2
2
(2.47)
Damit lautet die Lagrangefunktion bis zur quadratischen Ordnung
˙ = 1 mξ˙2 − 1 kξ 2 .
L(ξ, ξ)
2
2
(2.48)
Die zugehörige Lagrangegleichung für ξ ist
ξ¨ + ω02 ξ = 0,
ω0 =
q
k
.
m
(2.49)
Sie wird als die Bewegungsgleichung oder Schwingungsgleichung des harmonischen
Oszillators bezeichnet.
Eine Methode zur Lösung der Schwingungsgleichung (2.49) beruht auf dem Exponentialansatz
x(t) = A exp(λt),
(2.50)
Theoretische Physik I, SS 05, H.-J. Kull
64
mit Konstanten A und λ. Lineare Differentialgleichungen mit konstanten Koeffizienten,
n
X
di x
Lx =
ci i = 0,
dt
i=0
können durch diesen Ansatz gelöst werden. Die Ableitungen werden hierbei durch
Potenzen von λ ersetzt. Die Differentialgleichung definiert damit ein charakteristisches Polynom P (λ), dessen Nullstellen die möglichen Werte von λ bestimmen,
!
n
X
P (λ)x =
ci λi x = 0.
i=0
Sind alle Nullstellen verschieden, so bestimmen diese genau ein Basissystem linear
unabhängiger Lösungen der Differentialgleichung. Bei mehrfachen Nullstellen muß
der Ansatz erweitert werden. Im Fall der Schwingungsgleichung (2.49) folgt
P (λ) = λ2 + ω0 = (λ − iω0 )(λ + iω0 )
mit den beiden Nullstellen,
λ1,2 = ±iω0 .
Die allgemeine Lösung ist die Linearkombination
x(t) = A1 exp(iω0 t) + A2 exp(−iω0 t).
(2.51)
Die Anfangsbedingungen
x(0) = x0 = A1 + A2 ,
bestimmen die Konstanten A1,2 zu
v0
1
x0 +
,
A1 =
2
iω0
v(0) = v0 = iω0 (A1 − A2 )
1
A2 =
2
v0
x0 −
iω0
Wie in Abbildung (2.7) dargestellt, können die komplexen Amplituden durch ihren
Betrag und ihre Phase ausgedrückt werden
v0
x0 + i = a exp(iϕ0 )
ω
s0
v02
a=
+ x20 ,
(2.52)
ω02
v0
tan ϕ0 =
.
ω0 x0
Damit folgt die Lösung
x(t) = a cos(ω0 t − ϕ0 ).
(2.53)
Theoretische Physik I, SS 05, H.-J. Kull
65
Alternativ kann man A1,2 direkt in (2.51) einsetzen und erhält dann das Ergebnis
x(t) = x0 cos(ω0 t) +
v0
sin(ω0 t).
ω0
(2.54)
Abbildung 2.6: Polarkoordinaten a, ϕ
2.4.3
Schwingungen mit kleinen Amplituden
Gegeben sei ein konservatives System mit f Freiheitsgraden, das sich in einem stabilen Gleichgewicht befindet. Bei kleinen Auslenkungen der Massenpunkte aus ihrer
Gleichgewichtslage führt das System Schwingungen aus. Diese können als Überlagerung von Normalmoden dargestellt werden, denen jeweils eine charakteristische
Schwingungsfrequenz zugeordnet ist.
2.4.4
Entwicklung um die Gleichgewichtslage
Sei ξ = q − q0 eine Auslenkung des Systems aus der Gleichgewichtslage q0 . Wir
wählen diese Auslenkungen als verallgemeinerte Koordinaten und entwickeln die
kinetische und die potentielle Energie bis zur quadratischen Ordnung in ξ.
Die kinetische Energie eines konservativen Systems besitzt die Form (2.32). Da im
˙ In quadratischer Ordnung ergibt sich für die
Gleichgewicht q̇0 = 0 gilt, ist q̇ = ξ.
kinetische Energie der Ausdruck
f
1 X
µnm ξ˙n ξ˙m
T =
2 n,m=1
mit
µnm =
X
i
mi
∂xi ∂xi
∂qn ∂qm
.
q=q0
Theoretische Physik I, SS 05, H.-J. Kull
66
Da das Produkt der Geschwindigkeiten bereits von quadratischer Ordnung ist, kann
µnm im Gleichgewicht ausgewertet werden. In dieser Näherung ist µnm eine konstante
Matrix. Diese ist symmetrisch laut Definition und positiv definit, da die kinetische
Energie für ξ˙ 6= 0 positiv ist.
Im stabilen Gleichgewicht besitzt die potentielle Energie U = U (q) ein Minimum,
d.h. es gilt
∂U = 0.
∂qn q=q0
Die Entwicklung der potentiellen Energie lautet daher
f
1 X
knm ξn ξm
U = U (q0 ) +
2 n,m=1
mit
knm
∂ 2 U =
.
∂qn ∂qm q=q0
Ohne Einschränkung kann U (q0 ) = 0 gewählt werden, da die Bewegungsgleichungen
nicht von einer additiven Konstante in der Lagrangefunktion abhängen. Die Matrix
knm ist definitionsgemäß symmetrisch und positiv definit, da die potentielle Energie
nach Voraussetzung im Gleichgewicht ein Minimum annimmt.
Damit erhält man in quadratischer Ordnung die Lagrangefunktion
f
X
˙ =1
µnm ξ˙n ξ˙m − knm ξn ξm .
L(ξ, ξ)
2 n=1
(2.55)
Zur Aufstellung der Lagrangegleichungen berechnen wir zuerst das totale Differential
von L unter Berücksichtigung der Symmetrie von µnm und knm ,
f
1 X
˙
˙
˙
˙
dL =
µnm dξn ξm + ξn dξm − knm (dξn ξm + ξn dξm )
2 n,m=1
f
1 X
(µnm + µmn ) ξ˙m dξ˙n − (knm + kmn ) ξm dξn
=
2 n,m=1
=
f
X
µnm ξ˙m dξ˙n − knm ξm dξn .
n=1
Daraus erhält man für die verallgemeinerten Impulse und Kräfte
f
X
∂L
=
µnm ξ˙m
∂ ξ˙n
m=1
f
X
∂L
= −
knm ξm .
∂ξn
m=1
Theoretische Physik I, SS 05, H.-J. Kull
2.4.5
67
Schwingungsgleichung
Die zugehörigen Lagrangegleichungen stellen ein Gleichngssystem von f gekoppelten
linearen Oszillatoren dar,
f
X
µnm ξ¨m + knm ξm = 0
(2.56)
µ · ξ¨ + k · ξ = 0.
(2.57)
m=1
In Vektornotation gilt
Die Bewegungsgleichungen (2.57) bilden ein Differentialgleichungessystem mit konstanten Koeffizienten, das durch einen Exponentialansatz,
ξ = Ae−iωt ,
(2.58)
gelöst werden kann. Mit diesem Lösungsansatz folgt ein homogenes algebraisches
Gleichungssystem
k − ω 2 µ · A = 0.
(2.59)
Nichtverschwindende Lösungen existieren nur für bestimmte Werte von ω 2 die durch
die Lösbarkeitsbedingung des linearen Gleichungssystems
D(ω 2 ) = det k − ω 2 µ = 0
(2.60)
bestimmt werden. Hierbei ist D(λ) ein Polynom vom Grad f , das f komplexe Nullstellen besitzt. Diese seien
λk ,
k = 1, · · · , f .
Treten Mehrfachnullstellen auf, so sind einige der λk gleich. Zu einer r-fachen Nullstelle bestimmt das Gleichungessystem
(k − λk µ) · A(k) = 0
(2.61)
einen r-dimensionalen Lösungsraum, d.h. r der Komponenten von A(k) können beliebig gewählt werden, die restlichen Komponenten sind dann durch das Gleichungssystem eindeutig bestimmt. Insgesamt findet man auf diese Weise f Lösungsvektoren
A(k) .
Theoretische Physik I, SS 05, H.-J. Kull
68
Eigenfrequenzen
√
Zu jeder Nullstelle λk gibt es eine Frequenz ωk = λk . Diese werden auch als
Eigenfrequenzen bezeichnet. Wir zeigen, dass die Eigenfrequenzen für ein stabiles
Gleichgewicht reell sind.
Im allgemeinen besitzt ein Polynom komplexe Nullstellen. Aus der Symmetrie der
Matrizen folgt jedoch, dass die Nullstellen λk reell sind. Um dies zu zeigen, nehmen
wir zunächst an, es gäbe eine komplexe Nullstelle λ und einen zugehörigen komplexen
Lösungsvektor A. Durch skalare Multiplikation von (2.61) mit A∗ erhält man
λ=
A∗ · k · A
.
A∗ · µ · A
Die konjugiert komplexe Gleichung ist
(A∗ · k · A)∗
λ = ∗
(A · µ · A)∗
∗
∗
, ist
Für eine hermitesche Matrix, Mmn = Mnm
(A∗ · M · A)∗ = A · M ∗ · A∗ = A∗ · M · A
reell. Die reellen symmetrischen Matrizen µmn und kmn sind auch hermitesch. Daraus
folgt λ∗ = λ, so dass λ tatsächlich reell ist. Damit können auch die Lösungsvektoren
A reell gewählt werden. Da die Matrizen außerdem positiv definit sind, folgt sogar,
dass alle Nullstellen positiv sind. Daher können auch die Eigenfrequenzen ωk reell
und positiv gewählt werden.
Eine Sonderrolle spielt die doppelte Nullstelle ωk2 = 0. Wegen ξ¨ = −ω 2 ξ entspricht
diese Lösung einer gleichförmigen Bewegung
ξ = ξ0 + ξ˙0 t.
Normalmoden
Die Lösungen der Schwingungsgleichung für ωk > 0 besitzen die Form
ξ (k) = A(k) < Ck e−iωk t = A(k) Bk cos(ωk t + αk ),
(2.62)
wobei Ck = Bk e−iαk eine komplexe Integrationskonstante darstellt und die Lösungsvektoren A(k) durch eine Normierungsvorschrift
A(k) · µ · A(l) = δkl
(2.63)
Theoretische Physik I, SS 05, H.-J. Kull
69
festgelegt wurden. Dies sind Schwingungen mit genau einer Eigenfrequenz, die als
Normalmoden bezeichnet werden.
Die allgemeine Lösung des linearen Gleichungssystems ist eine Superposition aller
Normalmoden,
f
X
ξ=
A(k) Bk cos(ωk t + αk ) .
(2.64)
k=1
Die hierbei auftretenden 2f Integrationskonstanten werden durch die Anfangsbe˙
dingungen ξ(0) = ξ0 und ξ(0)
= ξ˙0 bestimmt.
2.4.6
Gekoppelte Pendel
Als Beispiel betrachten wir ein System von zwei gleichen Pendeln (Pendellänge:
l, Massenpunkte: m), die durch eine elastische Feder (Federkonstante: f , Gleichgewichtsänge: L) miteinander verbunden sind. Die Schwingungsebene sei die xz-Ebene,
die Aufhängepunkte seien P1 (0, 0) und P2 (L, 0). Die Feder verbindet die Massenpunkte m an den unteren Enden der Pendel. In der unteren Gleichgewichtslage
hängen die Pendel nach unten und die Feder ist entspannt.
z
x1
L
x
1
2
l
l
z1
f
Abbildung 2.7: Koordinaten des Doppelpendels
Die Auslenkung aus der Gleichgewichtslage wird durch den Winkel ϕ1 für Pendel
1 und ϕ2 für Pendel 2 bestimmt. Die kartesischen Koordinaten der Massenpunkte
sind
x1 = l sin ϕ1 ,
z1 = −l cos ϕ1 ,
x2 = L + l sin ϕ2 ,
z2 = −l cos ϕ2 .
Theoretische Physik I, SS 05, H.-J. Kull
70
Ihr Abstand ist
p
(x2 − x1 )2 + (z2 − z1 )2
p
=
(L + l sin ϕ1 − l sin ϕ2 )2 + (l cos ϕ2 − l cos ϕ1 )2 .
d =
Für kleine Auslenkungen gelten die Näherungen
1
z1 = l(−1 + ϕ21 ) + O(ϕ4 )
2
1
x2 = L + lϕ2 + O(ϕ2 ),
z2 = l(−1 + ϕ22 ) + O(ϕ4 )
2
2
d = L + l(ϕ2 − ϕ1 ) + O(ϕ ).
x1 = lϕ1 + O(ϕ2 ),
Die kinetische Energie ist die Summe der kinetischen Energien (2.37) für die einzelnen Pendel
1
1
T = ml2 ϕ̇21 + ml2 ϕ̇22 .
2
2
Die potentielle Energie besteht aus den Beiträgen
1
U = mgz1 + mgz2 + f (d − L)2 .
2
Die Entwicklung der potentiellen Energie bis zur quadratischen Ordnung in den
Auslenkungen ϕ1,2 ergibt
1
1
U = −2mgl + mgl(ϕ21 + ϕ22 ) + f l2 (ϕ2 − ϕ1 )2 .
2
2
Damit kann die Lagrangefunktion für kleine Schwingungen in der Form
1
1
1
L = ml2 (ϕ̇21 + ϕ̇22 ) − mgl(ϕ21 + ϕ22 ) − f l2 (ϕ2 − ϕ1 )2 .
2
2
2
gewählt werden. Die Ableitung der Bewegungsgleichungen nach dem Lagrangeverfahren ergibt das Gleichungssystem (2.57) wobei die Koeffizienten durch die Matrizen
ml2 0
µ =
0 ml2
mgl + f l2
−f l2
k =
−f l2
mgl + f l2
gegeben sind. Mit dem Exponentialansatz (2.58) ergibt sich daraus das algebraische
Gleichungssystem
k
k
−m
−ω 2 + gl + m
ϕ1
0
·
=
.
g
k
k
2
ϕ2
0
−m
−ω + l + m
Theoretische Physik I, SS 05, H.-J. Kull
71
Als Lösungen erhält man die beiden Schwingungen
p
ϕ1
1
=
C 1 cos(ω1 t + α1 ),
ω1 = g/l
ϕ2
1
p
ϕ1
1
=
C 2 cos(ω2 t + α2 ),
ω2 = g/l + 2f /m.
ϕ2
−1
(2.65)
(2.66)
Bei der ersten Schwingungsmode schwingen die Massen in Phase mit der Pendelfrequenz. Die Feder bleibt dabei entspannt. Bei der zweiten Mode schwingen die
Massen gegeneinander. Die Frequenz ist dann eine Kombination aus der Pendelund der Federfrequenz.
2.5
2.5.1
Orthogonale Transformationen, Drehungen
und Spiegelungen
Basistransformationen
Eine Basis {ei } heißt Orthonormalbasis, wenn die Basisvektoren normiert und paarweise orthogonal zueinander sind (Abschnitt 1.3.2). Die Einheitsvektoren bilden ein
Rechtssystem, falls sie nach der ”rechte-Hand-Regel” orientiert sind (Abb. 1.5). Die
Spatprodukte von jeweils drei Basisvektoren eines Rechtssystems bilden die Elemente des Levi-Civita-Tensors (1.18).
Wir untersuchen nun die Eigenschaften von Transformationen, die eine gegebene
Orthonormalbasis {ei } in eine neue Orthonormalbasis {e0i } überführen. Jeder Basisvektor der neuen Basis kann als Linearkombination der Basisvektoren der alten
Basis geschrieben werden,
e0i
=
3
X
αij ej ,
αij = e0i ·ej = cos(ϕij ).
(2.67)
j=1
Die Entwicklungskoeffizienten αij werden als Richtungskosinus bezeichnet, da sie
durch den Kosinus des Winkels ϕij zwischen der i-ten neuen und der j-ten alten
Richtung dargestellt werden.
Das Skalarprodukt von jeweils zwei Basisvektoren transformiert sich gemäß
X
e0i ·e0j =
αin αjm en ·em
n,m
An die Basistransformation (2.67) muss man die Forderung stellen, dass die Orthonormalität der Basis erhalten bleibt,
e0i · e0j = ei · ej = δij .
Theoretische Physik I, SS 05, H.-J. Kull
72
Daher müssen die Koeffizienten αij den Bedingungen
X
αin αjn = δij
α·αT = I,
⇔
⇔
α−1 = αT .
(2.68)
n
genügen. Hierbei bezeichnet α die Matrix mit den Matrixelementen αij , αT die transT
ponierte Matrix mit den Elementen αij
= αji und α−1 die Umkehrmatrix. Matrizen
mit der Eigenschaft (2.68) nennt man orthogonale Matrizen. Die Umkehrmatrix
einer orthgonalen Matrix ist gleich der transponierten Matrix.
Alternativ kann man die Orthogonalitätsbedingungen auch in der Form
αT ·α = I
(2.69)
schreiben. Denn für eine invertierbare Matrix mit β · α = I. folgt wegen (2.68)
β = β · I = β · (α·αT ) = (β · α)·αT = αT .
Die Elemente der Umkehrmatrix bestimmen die Entwicklungskoeffizienten eines alten Basisvektors nach der neuen Basis,
ei =
3
X
−1 0
αij
ej ,
−1
αij
= ei ·e0j = αji .
(2.70)
j=1
Die Orthogonalität der Matrix bedeutet, dass gemäß (2.68) die Zeilen und ebenso
gemäß (2.69) die Spalten jeweils paarweise orthogonal zueinander sind. Dies sind insgesamt 6 Bedingungen an die 9 Matrixelemente αij dar. Eine allgemeine orthogonale
Transformation wird durch die verbleibenden 3 freien Parameter festgelegt.
Eine orthogonale Matrix besitzt die Determinante
det α = ±1 .
(2.71)
Dies folgt aus (2.68) wegen
det(α · αT ) = (det α)(det αT ) = det α
2
=1.
Das Vorzeichen der Determinante bestimmt, ob das neue Basissystem ein Rechtssystem (+1) oder ein Linkssystem (−1) darstellt, denn es gilt
X
X
(2.72)
e01 ·(e02 ×e3 )0 =
α1i α2j α3k ei ·(ej ×ek ) =
ijk α1i α2j α3k = det α.
i,j,k
i,j,k
Theoretische Physik I, SS 05, H.-J. Kull
73
Die Menge aller orthogonalen n × n Matrizen heißt orthogonale Gruppe O(n), die
Menge aller orthogonalen n × n Matrizen mit det α = +1 spezielle orthogonale
Gruppe SO(n).
Durch eine stetige Variation der Parameter einer orthogonalen Transformation kann
sich das Vorzeichen der Determinante nicht sprunghaft ändern. Die Drehungen eines
dreidimensionalen Rechtssystems sind demnach Elemente der Gruppe SO(3).
Beim Übergang von einem Rechtssystem zu einem Linkssystem muss zusätzlich eine
Koordinatenachse gespiegelt werden. Raumspiegelungen stellen keine exakte Symmetrie der physikalischen Gesetze dar. Diese Symmetrie wird durch die schwache
Wechselwirkung gebrochen.
2.5.2
Aktive und passive Drehungen
Drehungen können als aktive oder als passive Drehungen aufgefasst werden. Bei einer
aktiven Drehung werden die Vektoren des physikalischen Systems gedreht, das Bezugssystem bleibt fest. Bei einer passiven Drehung wird das Bezugssystem gedreht,
die Vektoren des physikalischen Systems bleiben fest. Mathematisch wird das physikalische System durch einen Vektorraum, das Bezugssystem durch einen Dualraum
repräsentiert. Aktive Drehungen sind Abbildungen der Elemente des Vektorraums,
passive Drehungen Abbildungen der Elemente des Dualraums.
Dualraum
Durch das Skalarprodukt wird jedem Vektor u ein lineares Funktional
ϕu : R3 → R,
ϕu (x) = u · x.
(2.73)
zugeordnet. Diese Funktionale bilden die Elemente des Dualraums. Sie sind den
Vektoren eindeutig zugeordnet und werden daher häufig nicht von diesen unterschieden. In Komponentenschreibweise wird die Unterscheidung deutlich, wenn man
Vektoren als Spalten, Funktionale als Zeilen schreibt und diese nach der Regel der
Matrizenrechnung multipliziert
x1
ϕu (x) = u · x = (u1 , u2 , u3 ) · x2 .
x3
Einer Orthonormalbasis {ei } des Vektorraums entspricht eine Basis {di } des Dualraums. Die Basisfunktionale werden durch ihre Wirkung auf die Einheitsvektoren
definiert
di · ej = δij .
Theoretische Physik I, SS 05, H.-J. Kull
74
In Komponentenschreibweise gilt
d1 = (1, 0, 0) ,
d2 = (0, 1, 0) ,
d3 = (0, 0, 1) .
Durch Anwendung des i-ten Basisfunktionals di auf einen beliebigen Vektor v erhält
man die i-te Komponente des Vektors bezüglich der Orthonormalbasis
X
di · v =
vj di · ej = vi .
j
In diesem Sinn definiert die Dualbasis ein Bezugssystem für die Vektoren.
Aktive Drehungen
Durch eine aktive Drehung werden die Basisvektoren auf neue Basisvektoren abgebildet, die Dualbasis bleibt fest
e0j = a · ej ,
d0j = dj .
(2.74)
Die Matrix a der aktiven Drehung hat nach (2.67) und (2.80) die Elemente
aij = di · a · ej = di · e0j = αji .
(2.75)
a = αT = α−1 .
(2.76)
Damit gilt
Transformation von Vektoren
Ein beliebiger Vektor v transformiert sich wie die Basisvektoren
v0 = a · v
(2.77)
In Komponentenschreibweise erhält man
vi0 =
X
j
aij vj =
X
j
T
αij
vj ,
vi0 = di · v 0
vi = di · v .
(2.78)
Theoretische Physik I, SS 05, H.-J. Kull
75
Transformation von Skalaren
Bei orthogonalen Transformationen bleiben Längen von Vektoren und die Winkel
zwischen Vektoren invariant. Dies folgt aus der Invarianz des Skalarproduktes. Seien
u0 = a · u und v 0 = a · v die Bilder der Vektoren u und v bei einer orthogonalen
Transformation a. Dann gilt
u0 · v 0 = (a · u) · (a · v) = (aT · a · u) · v = u · v.
(2.79)
Passive Drehungen
Durch eine passive Drehung wird die Basis des Dualraumes auf eine neue Basis
abgebildet, die Basis des Vektorraumes bleibt fest
d0i = di · p,
e0i = ei .
(2.80)
Die Matrix p der passiven Transformation hat die Elemente
pij = di · p · ej = d0i · ej = αij .
(2.81)
Bei einer passiven Drehung bleibt ein beliebiger Vektor v 0 = v fest. Es ändern sich
aber seine Komponenten beim Wechsel der Dualbasis,
vi0 =
X
j
2.5.3
pij vj =
X
αij vj ,
vi0 = d0i · v,
vi = di · v .
(2.82)
j
Endliche Drehungen
Eine Drehung wird durch eine Drehachse n und einen Drehwinkel ϕ definiert.
Drehung um eine beliebige Achse
Bei einer Drehung um eine beliebige Achse n werde der Vektor V in den Vektor V 0
überführt. Die Komponente Vk parallel zur Drehachse bleibt invariant, die Komponente V⊥ senkrecht zur Drehachse wird um den Winkel ϕ gedreht,
Vk0 = Vk = (V · n)n,
V⊥0 = V⊥ cos ϕ + n × V⊥ sin ϕ .
Theoretische Physik I, SS 05, H.-J. Kull
76
n
V
V’
Abbildung 2.8: Drehung eines Vektors V um
die Drehachse n.
Zusammen ergibt dies mit V⊥ = V − Vk die Abbildung
V 0 = V cos ϕ + (V · n)n(1 − cos ϕ) + V × n sin ϕ .
(2.83)
Der Vektor dreht sich auf einem Kegelmantel um die Drehachse (Abb.2.8).
Drehung um eine Koordinatenachse
Das Koordinatensystem x1 x2 x3 werde durch eine Drehung um die x3 -Achse in das
Koordinatensystem x01 x02 x03 überführt. Nach Abb.(2.9) erhält man die Richtungskosinuse
α11 = α22 = cos ϕ,
α12 = cos(ϕ − π/2) = sin ϕ,
α21 = cos(ϕ + π/2) = − sin ϕ,
α33 = 1,
α13 = α23 = α31 = α32 = 0.
Sie ergeben die orthogonale Matrix
cos ϕ sin ϕ 0
α = − sin ϕ cos ϕ 0 .
0
0
1
(2.84)
Theoretische Physik I, SS 05, H.-J. Kull
77
Abbildung 2.9: Drehung des
kartesischen Koordinatensystems um den Winkel ϕ.
2.5.4
Eulersche Winkel
Ein Koordinatensystem xyz werde durch eine Drehung in ein Koordinatensystem
x1 x2 x3 überführt. Jede Drehung kann durch die Hintereinanderausführung der drei
folgenden Drehungen dargestellt werden. Die entsprechenden Drehwinkel φ, θ, ψ
werden als Eulerwinkel bezeichnet. Die xy Ebene des ursprünglichen Koordinatensystems schneidet die x1 x2 des gedrehten Systems entlang einer Geraden, die als
Knotenlinie bezeichnet wird. Die erste Drehung ist eine Drehung um die z-Achse
um den Winkel φ, so dass die x-Achse mit der Knotenlinie zur Deckung gebracht
wird. Der Einheitsvektor der gedrehten x-Achse zeigt entlang der Knotenlinie und
wird mit eK bezeichnet. Die zweite Drehung ist eine Drehung um die Knotenlinie
um den Winkel θ, so dass die z-Achse mit der x3 -Achse zur Deckung kommt. Bei
der dritten Drehung um die x3 -Achse um den Winkel ψ wird schließlich die x-Achse
von der Knotenlinie bis zur x1 -Achse gedreht. Damit sind die Achsen des Koordinatensystems xyz in die Achsen des Koordinatensystems x1 x2 x3 überführt worden.
Die Einheitsvektoren der drei Drehachsen besitzen im körperfesten System die Darstellung
nφ = ez = sin θ sin ψe1 + sin θ cos ψe2 + cos θe3
nθ = eK = cos ψe1 − sin ψe2
nψ = e3
2.5.5
(2.85)
Infinitesimale Drehungen
Infinitesimale orthogonale Transformationen weichen nur in linearer Ordnung in
einem kleinen Parameter dϕ von der Einheitsmatrix ab,
α = I + N dϕ .
(2.86)
Theoretische Physik I, SS 05, H.-J. Kull
78
Abbildung 2.10: Eulerwinkel
Die Matrix N ist antisymmetrisch,
N T = −N .
(2.87)
Letzteres folgt aus der Orthonormalitätsbedingung
α · αT − I = (I + N dϕ) · (I + N T dϕ) − I = N + N T dϕ = 0 .
(2.88)
Eine antisymmetrische 3 × 3 Matrix besitzt nur drei unabhängige Elemente. Diese
können den drei Elementen eines Vektors n auf folgende Weise zugeordnet werden,
Nij = (ei ×ej )·n =
X
ijk nk
.
(2.89)
k
Die zugehörige Matrix besitzt die Form
0
n3 −n2
0
n1
N = −n3
n2 −n1
0
.
(2.90)
Unter Verwendung von (2.86) und (2.89) erhält man für die Änderung der Basisvektoren,
X
X
dei =
Nij dϕej =
n·(ei ×ej )ej dϕ
j
=
X
j
j
(n×ei )·ej ej dϕ = n×ei dϕ .
(2.91)
Theoretische Physik I, SS 05, H.-J. Kull
79
Ein Vergleich mit (2.83) zeigt, dass es sich hierbei um eine Drehung um die Drehachse
n um den infinitesimalen Winkel dϕ handelt. Sie wird vollständig durch den Vektor
dϕ = ndϕ bestimmt. Für einen beliebigen Vektor V gilt entsprechend
dV = dϕ×V .
(2.92)
Allgemeiner zeigt das Eulersche Theorem, dass jeder orthogonalen Transformation
der Gruppe SO(3) genau eine Drehung um eine Drehachse entspricht. Den Beweis
für das Eulersche Theorem findet man z.B. in Goldstein et al., Classical Mechanics.
Bei der Hintereinanderausführung zweier infinitesimale Drehungen mit den Drehvektoren dϕ1 und dϕ2 sind diese additiv, d.h. es gilt für den Drehvektor der gesamten
Drehung
dϕ = dϕ1 + dϕ2 .
(2.93)
Dies folgt aus
dr 1 = dϕ1 ×r
dr 2 = dϕ2 ×(r + dr 1 ) = dϕ2 ×r
dr = dr 1 + dr 2 = (dϕ1 + dϕ2 )×r = dϕ×r .
2.5.6
Rotierende Bezugssysteme
Ein rotierendes Bezugssystem wird durch eine zeitabhängige Orthonormalbasis
{e0i (t)} dargestellt, die sich gegenüber der festen Orthonormalbasis {ei } eines Inertialsystems dreht. Zu jedem Zeitpunkt ist die Transformation der Basis eine orthonormale Transformation, d.h. es gilt
X
e0i (t) =
αij (t)ej .
(2.94)
j
Zur Berechnung der Geschwindigkeit und der Beschleunigung eines Massenpunktes
im rotierenden System benötigt man die zeitliche Änderung der Basisvektoren. Zu
jedem Zeitpunkt läßt sich die Änderung der Basisvektoren durch ein infinitesimale
Drehung der Form (2.91) angeben. Setzt man dei (t) = ėi (t)dt und dϕ(t) = ω(t)dt,
so gilt für die Änderungsgeschwindigkeit der Basisvektoren,
ėi (t) = ω(t)×ei (t).
(2.95)
Hierbei bezeichnet ω(t) = ω(t)n(t) den Vektor der momentanten Winkelgeschwindigkeit.
Theoretische Physik I, SS 05, H.-J. Kull
80
Bewegung im rotierenden System
Der Ortsvektor eines Massenpunktes sei r im Inertialsystem S und r 0 im rotierenden
System S 0 . Da es sich um denselben Vektor handelt gilt
r 0 = r.
(2.96)
Der Ortsvektor besitzt jedoch in beiden Systemen unterschiedliche Koordinatendarstellungen
X
X
r=
xi (t)ei (t) ,
r0 =
x0i (t)e0i (t) .
(2.97)
i
i
Die Geschwindigkeit des Massenpunktes wird in beiden Systemen unterschiedlich
definiert. Ein Beobachter im rotierenden System bestimmt die Geschwindigkeit des
Massenpunktes anhand der Koordinatendarstellung in S 0 ,
X
v0 =
ẋ0i e0i .
(2.98)
i
Die Geschwindigkeit des Massenpunktes in S ist aber
X
X
v = ṙ = ṙ 0 =
ẋ0i e0i + x0i ė0i =
ẋ0i e0i + ω×x0i e0i .
i
(2.99)
i
Damit ergibt sich für die Geschwindigkeit das Transformationsgesetz
v = v0 + ω × r0
.
(2.100)
Der Unterschied der Geschwindigkeiten ist die Rotationsgeschwindigkeit des Systems. Dieses Transformationsgesetz gilt nicht nur für die Zeitableitung des Ortsvektors, sondern genauso für die Zeitableitung eines beliebigen Vektors. Daher kann
man es auch als Transformationsgesetz für die Zeitableitung auffassen,
d0
d
=
+ ω×,
dt
dt
(2.101)
die links auf die Darstellung im Inertialsystem S und rechts auf die Darstellung im
rotierenden System S’ wirkt.
Das Transformationsgesetz für die Beschleunigungen erhält man durch zweimalige
Anwendung von (2.101),
0
0
d2
d
d
r =
+ ω×
+ ω× r 0
dt2
dt
dt
dω 0 0
= a0 + 2ω × v 0 + ω×(ω × r 0 ) +
×r .
(2.102)
dt
Theoretische Physik I, SS 05, H.-J. Kull
81
Die Beschleunigung im rotierenden System wird hierbei definiert durch
X
a0 =
ẍ0i e0i .
i
Mit dem Transformationsgesetz für die Beschleunigungen erhält man für die Newtonsche Bewegungsgleichung im rotierenden System
mr̈ 0 = F + F C + F Z + F A .
(2.103)
Hierbei treten die folgenden Scheinkräfte auf
F C = −2mω × v 0
F Z = −mω×(ω × r 0 )
F A = −mω̇×r 0 .
Man bezeichnet F C als Corioliskraft, F Z als Zentrifugalkraft. Bei einer beschleunigten Drehbewegung wirkt noch die Kraft F A .
2.6
2.6.1
Starrer Körper
Freiheitsgrade
Ein Körper wird als starrer Körper bezeichnet, wenn alle Punkte der Massenverteilung feste Relativabstände zueinander besitzen. Die Massenverteilung kann
punktförmig oder kontinuierlich vorgegeben sein.
Ein Punkt Pν eines starren Körpers kann in einem Inertialsystem S durch den Ortsvektor
r ν,S = r 0 + r ν
(2.104)
dargestellt werden. Hierbei bezeichnet r 0 einen beliebigen Bezugspunkt im starren
Körper, der den Ursprung eines körperfesten Bezugssystems K bildet. Der Ortsvektor von Pν im körperfesten System ist r ν . Die Basisvektoren und die Koordinaten
in den beiden Bezugssystemen werden durch folgende Notation unterschieden:
S : r S = x(t)ex + y(t)ey + z(t)ez ,
K : r = x1 e1 (t) + x2 e2 (t) + x3 e3 (t).
Ein starrer Körper besitzt 6 Freiheitsgrade, drei Freiheitsgrade der Translation und
drei Freiheitsgrade der Rotation. Die Lage seiner Punkte kann dementsprechend
durch die 3 Komponenten des Bezugspunktes und durch die 3 Winkel der Drehung
von K relativ zu S angegeben werden.
Theoretische Physik I, SS 05, H.-J. Kull
2.6.2
82
Winkelgeschwindigkeit
Die Geschwindigkeit eines Punktes Pν ist
v ν,S = v 0 + ω × r ν .
(2.105)
Der erste Term bezeichnet die Geschwindigkeit des Bezugspunktes, der zweite die
Geschwindigkeit der Drehung um den Bezugspunkt. Die Komponenten der vektoriellen Winkelgeschwindigkeit ω im körperfesten System werden mit
ω = ω1 e1 + ω2 e2 + ω3 e3 .
(2.106)
bezeichnet. Sie können in folgender Weise durch die Euler-Winkel ausgedrückt werden. Die infinitesimale Drehung um dϕ = ωdt im Zeitintervall dt kann additiv aus
den Drehungen um die drei Eulerwinkel zusammengesetzt werden,
ω = φ̇ez + θ̇eK + ψ̇e3 .
(2.107)
Die Komponenten von ω in K berechnen sich damit zu
ω1 = ω · e1 = φ̇ sin θ sin ψ + θ̇ cos ψ
ω2 = ω · e2 = φ̇ sin θ cos ψ − θ̇ sin ψ
ω3 = ω · e3 = φ̇ cos θ + ψ̇
ey
e3
eK
ez
e
2
ezsin
eK’
ex
(2.108)
eK
e1
eK’
Abbildung 2.11: Komponenten der Drehachsen eK und ez im körperfesten System
Theoretische Physik I, SS 05, H.-J. Kull
2.6.3
83
Trägheitstensor
Kinetische Energie
Die kinetischen Energie des starren Körpers kann durch Momente der Massenverteilung, die Gesamtmasse M , den Schwerpunkt R, und den Trägheitstensor
Θ=
X
mν rν2 I − r ν r ν
(2.109)
ν
ausgedrückt werden. Man findet
1
1
T = M v02 + ω·Θ · ω + ω·(R×M v 0 ).
2
2
(2.110)
Der erste Anteil ist die Translationsenergie des Bezugspunktes, der zweite die Rotationsenergie um den Bezugspunkt. Als neue Größe tritt hierbei der Trägheitstensor
auf. Der dritte Anteil ist ein Mischterm. Er verschwindet, wenn entweder der Bezugspunkt ruht (v 0 = 0) oder wenn der Schwerpunkt als Bezugspunkt gewählt wird
(R = 0).
Zur Herleitung dieses Ergebnisses summiert man die kinetischen Energien der einzelnen Massenpunkte mit den Geschwindigkeiten (2.105),
1X
mν (v 0 + ω × r ν )2
T =
2 ν
1X
=
mν v02 + 2v 0 ·(ω × r ν ) + (ω × r ν )2
2 ν
1X
1
M v02 + ω·(R×M v 0 ) +
mν (ω × r ν )2 .
=
2
2 ν
Der letzte Term stellt die Rotationsenergie dar. Sie kann auf folgende Weise umgeformt werden,
1X
Trot =
mν (ω × r ν )·(ω × r ν )
2 ν
1X
=
mν ω· {r ν × (ω × r ν ))}
2 ν
1X
=
mν ω· rν2 ω − (ω · r ν ) r ν
2 ν
(
)
X
1
ω·
mν rν2 I − r ν r ν
·ω.
(2.111)
=
2
ν
Theoretische Physik I, SS 05, H.-J. Kull
84
Der in Klammern stehende Ausdruck ist der Trägheitstensor.
Koordinatendarstellung des Trägheitstensors
Definiert man die Koordinaten des Punktes Pν durch xνi = r ν ·ei , so lautet die
Komponentendarstellung des Trägheitstensors
Θik = ei ·Θ · ek =
X
mν rν2 δik − xνi xνk
(2.112)
ν
Die entsprechende Darstellung der Rotationsenergie lautet
Trot
3
1 X
Θik ωi ωk
=
2 i,k=1
Für eine kontinuierliche Massenverteilung mit der Massendichte γ(r) kann die Summation durch eine Integration ersetzt werden,
Z
Z
M = dV γ(r),
Θik = dV γ(r) r2 δik − xi xk .
(2.113)
Trägheitsmomente
Eine einfachere Darstellung erhält man, indem man die Drehachse n als eine Koordinatenachse wählt. Hier gilt
1
Trot = Θn ω 2 ,
2
Θn = n · Θ · n,
ω = ωn.
Hierbei wird Θn als das Trägheitsmoment des starren Körpers bezüglich der Drehachse n bezeichnet. Es kann nach der Formel
X
X
Θn =
mν (n × r ν )2 =
mν rν2 sin2 ϑν
ν
ν
berechnet werden, wobei ϑν den Winkel zwischen r ν und n bezeichnet.
Hauptträgheitsmomente
Der Trägheitstensor ist symmetrisch und besitzt daher in einem beliebigen Koordinatensystem 6 unabhängige Elemente. Eine symmetrische Matrix kann durch eine
Drehung der Koordinatenachsen immer auf Diagonalform gebracht werden. Dieses
Theoretische Physik I, SS 05, H.-J. Kull
85
Koordinatensystem heißt Hauptachsensystem des Trägheitstensors, die Diagonalelemente der Matrix sind die Hauptträgheitsmomente. Die Hauptachsen xi und die
zugehörigen Hauptträgheitsmomente Θi findet man als Lösungen des Eigenwertproblems
Θ · xi = Θi xi ,
det |Θik − Θi δik | = 0.
(2.114)
Sind allle Hauptträgheitsmomente verschieden, so nennt man den starren Körper
einen unsymmetrischen Kreisel. Sind zwei Hauptträgheitsmomente gleich, so handelt es sich um einen symmetrischen Kreisel. Sind alle drei Hauptträgheitsmomente
gleich, so spricht man von einem Kugelkreisel.
Drehungen um den Schwerpunkt
Bisher wurden Drehungen um einen beliebigen Bezugspunkt r0 betrachtet. Meist
wählt man als Bezugspunkt jedoch den Schwerpunkt R. Im körperfesten Bezugssystem, dessen Ursprung im Bezugspunkt r0 liegt, sei a der Ortsvektor des Schwerpunktes und rν = a + rν0 der Ortsvektor des ν-ten Massenpunktes. Hierbei ist rν0
der Ortsvektor des ν-ten Massenpunktes im Schwerpunktssystem und es gilt daher
X
mν rν0 = 0 .
(2.115)
ν
Durch Substitution der Ortsvektoren erhält man unter Beachtung von (2.115) für
den Trägheitstensor das Transformationsgesetz
h
i
X
0 2
0
0
Θ =
mν (a + rν ) I − (a + rν ) (a + rν )
ν
= Θa + Θ0
(2.116)
mit
Θa = M (a2 I − aa),
M=
X
mν ,
ν
Θ0 =
X
mν rν02 I − rν0 rν0
.
ν
Das Trägheitsmoment bezüglich einer Drehachse n transformiert sich gemäß dem
Satz von Steiner:
Θn = Θ0n + M a2⊥ ,
a⊥ = |n × a| .
(2.117)
Hierbei bezeichnet a⊥ den Abstand des Schwerpunktes von der Drehachse durch
den Punkt r0 und Θ0n das Drehmoment um eine dazu parallele Achse durch den
Schwerpunkt.
Theoretische Physik I, SS 05, H.-J. Kull
86
Drehimpuls
Der Drehimpuls des starren Körpers um den Bezugspunkt r 0 kann ebenfalls mit
Hilfe des Trägheitstensors angegeben werden,
L = R×M v 0 + Θ · ω.
(2.118)
Der erste Term verschwindet, wenn der Bezugspunkt ruht oder wenn der Schwerpunkt als Bezugspunkt gewählt wird. Unter diesen Voraussetzungen gilt
L = Θ · ω.
(2.119)
Der Trägheitstensor ist eine lineare Abbildung der Winkelgeschwindigkeit auf den
Drehimpuls. Nur bei Drehungen um eine Hauptträgheitsachse ist L parallel zu ω.
Zur Herleitung von (2.118) summiert man wieder die Einzeldrehimpulse,
X
r ν ×mν (v 0 + ω × r ν )
L =
ν
=
X
(mν r ν )×v 0 + mν r ν ×(ω × r ν )
ν
= R×M v 0 +
(
X
)
mν rν2 − r ν r ν
·ω.
(2.120)
ν
2.6.4
Eulersche Kreiselgleichungen
Die Änderungen des Gesamtimpulses P und des Gesamtdrehimpulses L eines starren Körpers genügen im Inertialsystem S den Gleichungen
d
P = F,
dt
d
L = N.
dt
(2.121)
Hierbei bezeichen
F =
X
F eν ,
N=
ν
X
r S,ν ×F eν
(2.122)
ν
die Summe der äußeren Kräfte bzw. Drehmomente. Wir beschränken uns auf den
Fall, in dem die von außen einwirkende Gesamtkraft verschwindet, so dass
X
X
F = 0,
N=
(r 0 + r ν )×F eν =
r ν ×F eν
ν
ν
Theoretische Physik I, SS 05, H.-J. Kull
87
gesetzt werden kann. Damit ist der Gesamtimpuls erhalten. Das Drehmoment kann
wie angegeben auf das körperfeste System bezogen werden.
Zur Vereinfachung des Drehimpulssatzes sei der Bezugspunkt so gewählt, dass für
den Drehimpuls (2.119) gilt. Die Achsen des körperfesten Bezugssystems können
noch so gewählt werden, dass das körperfeste System ein Hauptachsensystem darstellt. Die Transformation der Drehimpulsänderung auf das körperfeste System ergibt dann,
dL dL =
+ω ×L
dt S
dt K
dω = Θ·
+ ω× (Θ · ω)
(2.123)
dt K
In Komponentenschreibweise lautet das Gleichungssystem
Θ1 ω̇1 + (Θ3 − Θ2 )ω2 ω3 = N1
Θ2 ω̇2 + (Θ1 − Θ3 )ω3 ω1 = N2
Θ3 ω̇3 + (Θ2 − Θ1 )ω1 ω2 = N3 .
(2.124)
Hierbei sind die Komponenten der Winkelgeschwindigkeit durch (2.108) und die
Hauptträgheitsmomente durch (2.114) definiert. Diese Gleichungen werden als Eulersche Kreiselgleichungen bezeichnet. Sie bestimmen die Eulerwinkel und damit die
Orientierung des starren Körper als Funktion der Zeit.
2.6.5
Kräftefreie Bewegung
Bei der Diskussion der Eulerschen Kreiselgleichungen beschränken wir uns auf den
kräftefreien Fall. Hier verschwindet das Drehmoment N auf der rechten Seite von
(2.124).
Gleichförmige Rotation eines unsymmetrischen Kreisels
Wir untersuchen zuerst unter welchen Bedingungen ein unsymmetrischer Kreisel um
eine körperfeste Achse gleichförmig rotieren kann. Unter der Voraussetzung ω̇ = 0
folgt aus (2.123), dass der Drehimpuls parallel zur Winkelgeschwindigkeit gerichtet
sein muß,
L = Θ · ω = Θi ω
Dies ist die Bedingung für eine Hauptträgheitsachse. Somit sind gleichförmige Rotationen nur um Hauptträgheitsachsen möglich.
Die Drehachse sei nun nahezu parallel zu einer Hauptträgheitsachse. Ohne Einschränkung sei dies die Achse mit dem Hauptträgheitsmoment Θ1 , so dass ω2 << ω1
Theoretische Physik I, SS 05, H.-J. Kull
88
und ω3 << ω1 gilt. In diesem Fall können die Bewegungsgleichungen (2.124) durch
Linearisierung in den kleinen Größen ω2 und ω3 vereinfacht werden,
Θ1 ω̇1 = 0
Θ2 ω̇2 + (Θ1 − Θ3 )ω1 ω3 = 0
Θ3 ω̇3 + (Θ2 − Θ1 )ω1 ω2 = 0.
(2.125)
Aus der ersten Gleichung folgt, dass ω1 = ω10 als konstant angenommen werden
kann. Aus den beiden anderen Gleichungen erhält man die Schwingungsgleichungen
ω̈2 + Hω2 = 0,
ω̈3 + Hω3 = 0,
H=
(Θ1 − Θ3 )(Θ1 − Θ2 ) 2
ω10 .
Θ2 Θ3
Für H > 0 ist die Drehung um die Hauptträgheitsachse stabil, für H < 0 instabil.
Stabile Drehungen erfolgen daher um die Hauptträgheitsachsen mit dem kleinsten
und dem größten Trägheitsmoment. Die Drehung um die Hauptträgheitsachse mit
dem mittleren Trägheitsmoment ist instabil.
Symmetrischer Kreisel
Gegeben sei nun ein symmetrischer Kreisel mit der Symmetrieachse x3 . Die Symmetrieachse wird als Figurenachse bezeichnet. Setzt man
Θ1 = Θ2 ,
w=
(Θ1 − Θ3 )
ω3
Θ1
so reduzieren sich die Bewegungsgleichungen (2.124) auf die Form
ω̇1 − w ω2 = 0
ω̇2 + w ω1 = 0
ω̇3 = 0.
(2.126)
Die Lösung bestimmt die Komponenten der Winkelgeschwindigkeit im körperfesten
System,
ω1 = φ̇ sin θ sin ψ + θ̇ cos ψ = a sin(wt + ψ0 ),
ṗ
ω2 = φ̇ sin θ cos ψ − θ̇ sin ψ = = a cos(wt + ψ0 ),
w
ω3 = φ̇ cos θ + ψ̇ = ω30 ,
(2.127)
mit Integrationskonstanten a, ψ0 und ω30 . Die Winkelgeschwindigkeit ω bildet einen
festen Winkel γ mit der Figurenachse, der durch tan γ = a/ω30 bestimmt ist. Dabei
läuft sie auf einem Kegel, dem Polkegel, um die Figurenachse um.
Theoretische Physik I, SS 05, H.-J. Kull
89
Abbildung 2.12: Präzession
eines kräftefreien symmetrischen Kreisels.
Im Inertialsystem ist der Drehimpuls erhalten. Wählt man die z- Achse des Inertialsystems in Richtung des Drehimpulsvektors, so gilt L = L0 ez . Die Komponenten
von L im körperfesten System sind dann
L1
ez ·e1
sin θ sin ψ
θ1 ω1
L2 = L0 ez ·e2 = L0 sin θ cos ψ = θ2 ω2 .
(2.128)
L3
ez ·e3
cos θ
θ3 ω3
Wegen θ3 ω30 = const folgt aus der dritten Komponente L3 = L0 cos θ = θ3 ω30 , dass
der Eulerwinkel
θ = θ0
konstant ist. Daher läuft die Figurenachse auf einem Kegel mit Öffnungswinkel 2θ0
um die raumfeste Drehimpulsachse um. Dieser Kegel wird als Präzessionskegel bezeichnet. Die Drehachse ω = φ̇ez + ψ̇e3 bildet mit der Drehimpulsachse ebenfalls
einen festen Winkel. Sie läuft auf dem sogenannten Spurkegel um die Drehimpulsachse um. Anschaulich ergibt sich die Präzession der Figurenachse, indem der Polkegel
auf dem Spurkegel abrollt.
Die restlichen beiden Eulerwinkel können durch die ersten beiden Gleichungen von
(2.127) bestimmt werden. Man erhält
2.6.6
φ̇2 sin2 θ0 = a2
=⇒
φ̇ sin θ0 sin ψ = a sin ψ
=⇒
a
t
sin θ0
ψ = ψ0 + wt.
φ = φ0 +
Schwerer symmetrischer Kreisel
Gegeben sei ein symmetrischer Kreisel mit den Hauptträgheitsmomenten Θ1 = Θ2
und Θ3 bezüglich eines Bezugspunktes auf der Figurenachse e3 .
Theoretische Physik I, SS 05, H.-J. Kull
90
z
x3
s
Mg
Abbildung 2.13: Drehung eines symmetrischen schweren Kreisels um einen festen
Bezugspunkt im Koordinatenursprung. Der Schwerpunkt liegt auf der Figurenachse
x3 im Abstand s vom Ursprung. Die Figurenachse ist gegen die z-Achse um den
Eulerwinkel θ geneigt.
Als Normalkoordinaten für die Drehung des Kreisels um den festen Bezugspunkt
werden die Eulerwinkel verwendet. Mit den entsprechenden Komponenten der Winkelgeschwindigkeit (2.108) erhält man für die kinetische Energie
1
ω·Θ·ω
2
1
1
1
=
Θ1 ω12 + Θ1 ω22 + Θ3 ω32
2
2
2
1
1
=
Θ1 (φ̇2 sin2 θ + θ̇2 ) + Θ3 (φ̇2 cos θ + ψ̇)2 .
2
2
T =
In einem Schwerefeld g = −gez erhält man für die potentielle Energie
X
U =−
mν g · rν = −M g · R = M gs cos θ .
(2.129)
(2.130)
ν
Hierbei bezeichnet s den Abstand des Schwerpunktes vom Bezugspunkt. Aus (2.129)
und (2.130) ergibt sich die Lagrangefunktion
1
1
L = Θ1 (φ̇2 sin2 θ + θ̇2 ) + Θ3 (φ̇2 cos θ + ψ̇)2 − M gs cos θ .
2
2
(2.131)
Da die Winkel φ und ψ zyklische Koordinaten sind, sind die zugehörigen Drehim-
Theoretische Physik I, SS 05, H.-J. Kull
91
pulse erhalten,
∂L
= Θ1 sin2 θφ̇ + Θ3 (φ̇ cos θ + ψ̇) cos θ ,
∂ φ̇
∂L
=
= Θ3 (φ̇ cos θ + ψ̇) .
∂ ψ̇
Lz =
L3
Da die Lagrangefunktion zeitunabhängig ist, ist auch die Energie eine Erhaltungsgröße
∂L
∂L
∂L
φ̇ +
θ̇ +
ψ̇ − L
∂ φ̇
∂ θ̇
∂ ψ̇
1
1
=
Θ1 (φ̇2 sin2 θ + θ̇2 ) + Θ3 (φ̇2 cos θ + ψ̇)2 + M gs cos θ .
2
2
E =
Die Winkelgeschwindigkeiten φ̇ und ψ̇ werden durch die Drehimpulserhaltung bestimmt,
L3
Θ3
Lz − L3 cos θ
φ̇ sin θ =
.
sin θ Θ1
φ̇ cos θ + ψ̇ =
Eliminiert man diese Winkelgeschwindigkeiten aus dem Energiesatz, so erhält man
einen Energiesatz für die θ-Bewegung,
1
E 0 = Θ1 θ̇2 + Uef f (θ)
2
(2.132)
mit
1 L23
− M gs = const
2 Θ3
(Lz − L3 cos θ)2
=
− M gs(1 − cos θ) .
2Θ1 sin2 θ
E0 = E −
Uef f
(2.133)
Das effektive Potential Uef f besitzt im Intervall zwischen 0 und π ein Minimum
Uef f,min . Wird E 0 = Uef f,min gewählt, so kann der Kreisel eine Präzessiosbewegung
mit einem festen Winkel θ0 ausführen. Für E 0 > Uef f,min ändert sich θ periodisch in
einem Winkelintervall θ1 ≤ θ ≤ θ2 . Diese Bewegung wird als Nutation bezeichnet.
Sie ist der Präzessionsbewegung um die z-Achse mit der Winkelgeschwindigkeit φ̇
überlagert. Der Durchstoßpunkt der Figurenachse durch eine Kugel um den Bezugspunkt beschreibt hierbei eine periodische Bahn zwischen zwei Breitenkreisen.
Kapitel 3
Thermodynamik
Die Thermodynamik ist eine phänomenologische Theorie der Wärme. Zur Beschreibung eines thermodynamischen Systems werden Grundgrößen wie Temperatur,
Druck, Volumen, innere Energie und Entropie eingeführt. Sie legen den thermodynamischen Zustand des Systems eindeutig fest. Dieser Zustand kann durch die
Zufuhr von Wärme oder Arbeit geändert werden. Die möglichen Zustandsänderungen werden durch die Hauptsätze der Thermodynamik beschrieben.
Ein thermodynamisches System ist im Prinzip ein Vielteilchensystem, dessen Dynamik den Gesetzen der Mechanik bzw. der Quantenmechanik unterliegt. Unter geeigneten Annahmen können thermodynamische Eigenschaften aus mechanischen und
statistischen Gesetzen abgeleitet werden. Eine solche mikroskopische Begründung
der Thermodynamik ist Gegenstand der statistischen Mechanik.
3.1
Thermodynamische Systeme
Mikroskopischer Zustand: Der mikroskopische Zustand eines Systems wird in
der klassischen Mechanik durch die Angabe der Orte und Geschwindigkeiten aller
Teilchen festgelegt. Bei N Teilchen erfordert dies 6N Variablen.
Makroskopischer Zustand: Makroskopische Systeme bestehen aus einer großen
Zahl von Teilchen (N ≈ 1023 ). Es ist praktisch nicht möglich den mikroskopischen
Zustand eines makroskopischen Systems festzulegen. Tatsächlich ist man meist nur
an Mittelwerten weniger Größen interessiert. Die Größen, die den makroskopischen
Zustand eines Körpers charakterisieren nennt man thermodynamische Variablen.
Zum Beispiel kann der thermodynamische Zustand eines Gases durch die Temperatur t, das Volumen V und den Druck p festgelegt werden. Diese Variablen sind i.a.
nicht unabhängig voneinander. Eine Beziehung zwischen p, V , und t,
f (p, V, t) = 0
92
(3.1)
Theoretische Physik I, SS 05, H.-J. Kull
93
nennt man die Zustandsgleichung. Der makroskopische Zustand des Gases wird also
bereits durch zwei unabhängige thermodynamische Variablen vollständig bestimmt.
Gleichgewichtszustand: Zustände, die sich bei unveränderten äußeren Bedingungen nicht ändern, werden als Gleichgewichtszustände bezeichnet, z.B. ein Gas
bei konstantem Druck und konstanter Temperatur in einem vorgegebenem Volumen.
Zustandsänderung: Eine Zustandsänderung von einem Anfangszustand p1 , V1 zu
einem Endzustand p2 , V2 wird durch eine Kurve in der (p, V )-Ebene beschrieben.
Spezielle Zustandsänderungen sind
Isotherme:
Isochore:
Isobare:
Kurve in der (p, V )-Ebene zu einer festen Temperatur t = const.
Kurve in der (p, t)-Ebene zu einem festen Volumen: V = const.
Kurve in der (V, t)-Ebene zu einem festen Druck: p = const.
Eine Zustandsänderung heißt reversibel, wenn sie durch eine Folge von Gleichgewichtszuständen beschrieben wird. Eine reversible Zustandsänderung kann durch
eine quasistatische Änderung eines Parameters, z.B. des Volumens V , erfolgen und
sie ist umkehrbar indem man quasistatisch zum Ausgangszustand zurückkehrt.
Befindet sich ein System zu irgendeinem Zeitpunkt in einem Nichtgleichgewichtszustand, so geht es mit sehr hoher Wahrscheinlichkeit im Verlauf der weiteren Entwicklung in einen Gleichgewichtszustand über. Eine Umkehrung dieser Zustandsänderung ist praktisch nicht möglich. Der Übergang von einem Gleichgewichtszustand in
den Nichtgleichgewichtszustand erfolgt nur mit einer verschwindend geringen Wahrscheinlichkeit (Beispiel: Temperatur- oder Dichteausgleich). Solche Zustandsänderungen heißen irreversibel.
Arbeit: Wir betrachten als System einen mit Gas gefüllten Kolben mit einem beweglichen Stempel der Fläche A. Wird der Stempel aufgrund des Gasdruckes p um
eine infinitesimale Strecke dh verschoben, so leistet das System die Arbeit
dW = −pAdh = −pdV
(3.2)
Hierbei gilt folgende Vorzeichenkonvention: Arbeit, die die Umgebung am System
verrichtet wird positiv gezählt. Arbeit die das System an seiner Umgebung verrichtet
wird negativ gezählt.
Bei einer allgemeinen Volumenvergrößerung von A nach B verrichtet das System,
unabhängig von der Form des Volumens, die Arbeit
ZVB
∆W = −
pdV.
(3.3)
VA
Zyklische Zustandsänderung: Ist der Endzustand gleich dem Anfangszustand,
so spricht man von einer zyklischen Zustandsänderung oder von einem Kreisprozess.
Die verrichtete Arbeit, ist die von der geschlossenen Kurve eingeschlossene Fläche.
Theoretische Physik I, SS 05, H.-J. Kull
94
Abbildung 3.1: Bei einer Verschiebung des Stempels um die
Strecke dh verrichtet das Gas die
Arbeit (3.2).
Abbildung 3.2: Der Arbeit |∆W |
entspricht im (p,V)-Diagramm
die Fläche unterhalb der Kurve
p = p(V ) zwischen dem Anfangspunkt A und dem Endpunkt B.
Abbildung 3.3: Bei einem Kreisprozeß durchläuft das System
einen geschlossenen Weg. Die von
der Kurve eingeschlossene Fläche
entspricht der vom System verrichteten Arbeit. Bei der Expansion (dV > 0) ist dW negativ,
bei der Kompression (dV < 0) ist
dW positv.
Theoretische Physik I, SS 05, H.-J. Kull
3.2
95
Erster Hauptsatz
Der erste Hauptsatz der Thermodynamik ist der Energieerhaltungssatz für thermodynamische Systeme.
Abgeschlossenes konservatives System: In einem abgeschlossenen mechanischen System mit konservativen Kräften ist die Energie erhalten, d.h. die Energie Ua im mikroskopischen Zustand a und die Energie Ub in einem nachfolgenden
mikroskopischen Zustand b sind gleich:
Ua = Ub .
(3.4)
Makroskopische Systeme sind in der Regel nicht abgeschlossen, da sie Energie mit der
Umgebung austauschen können. Beschränkt man sich auf Energieaustausch durch
die Arbeitsleistung äußerer Kräfte, so nennt man ein System thermisch isoliert.
Arbeit ist dadurch charakterisiert, dass ein makroskopischer Parameter, wie z.B.
das Volumen durch eine Kraft geändert wird.
Thermisch isoliertes System: Wird am System vom Anfangszustand A zum
Endzustand B die Arbeit ∆W verrichtet, so ist die Energieänderung
∆U = UB − UA = ∆W.
(3.5)
In der Regel gibt es weitere Möglichkeiten des Energieaustausches durch mikroskopische Prozesse bei denen kein makroskopischer Parameter geändert wird. Die Energie
wird direkt in ungeordnete Bewegung umgewandelt. Diese Form der Energiezufuhr
bezeichnet man als Wärme.
System im thermischen Kontakt: Für ein System, das nicht thermisch isoliert
ist, lautet der Energieerhaltungssatz
∆U = ∆W + ∆Q
erster Hauptsatz
(3.6)
Hierbei bezeichnet ∆U die Änderung der inneren Energie des Systems, ∆W die am
System verrichtete Arbeit und ∆Q die dem System zugeführte Wärme.
Äquivalenz von Wärme und Arbeit: Wasser kann auf zwei unterschiedliche
Arten von einer Anfangstemperatur tA auf eine Endtemperatur tB erwärmt werden:
(i) Mechanische Arbeit (Rotor)
(ii) Wärmezufuhr (Flamme, Kochplatte)
Da im Fall (i) eine Energieänderung durch die geleistete Arbeit eintritt, muß die
zugeführte Wärme im Fall (ii) der gleichen Energieänderung entsprechen. Das mechanische Wärmeäquivalent wurde zuerst 1842 von Robert Mayer bestimmt. Wesentlichen Anteil an der Formulierung des ersten Hauptsatzes hatten Robert Mayer
Theoretische Physik I, SS 05, H.-J. Kull
96
und James Prescott Joule. Die Erkenntnis, dass Wärme eine Energieform darstellt,
löste die Vorstellung von einem Wärmestoff ab.
Infinitesimale Energieänderung: dW = −pdV
dU = −pdV + dQ
(3.7)
Kreisprozesse: ∆U = 0 Ein Kreisprozess ist eine Folge von Zustandsänderungen
bei der das System wieder in den Anfangszustand zurückkehrt. Nach einem Umlauf
gilt
I
I
∆U = 0,
W = Q,
W =
pdV,
Q=
dQ.
(3.8)
Die während eines Kreisprozesses vom System geleistete Arbeit W ist gleich der vom
System absorbierten Wärmemenge Q. Bei Kreisprozessen ist es üblich die in einem
Umlauf geleistete Arbeit positiv zu zählen.
3.2.1
Spezifische Wärme
Die Wärmemenge, die notwendig ist, um die Temperatur eines Körpers um eine
Temperatureinheit zu erhöhen,
dQ
(3.9)
C=
dT
heißt Wärmekapazität. Da die Wärmekapazität von der Masse abhängt, verwendet
man meist die “spezifische Wärme” pro Masseneinheit, Volumeneinheit oder pro
Mol der Substanz. Die Wärmekapazität hängt davon ab, welche Variablen konstant
gehalten werden.
1. U = U (T, V ) :
dU =
dU =
dQ =
CV
=
∂U
∂U
dT +
dV
∂T V
∂V T
−pdV + dQ
∂U
∂U
dT + p +
dV
∂T V
∂V T
dQ ∂U
=
dT ∂T V
V =const
(3.10)
Theoretische Physik I, SS 05, H.-J. Kull
97
2. U = U (T, p) :
∂U
∂U
dU =
dT +
dp
∂T p
∂p T
∂V
∂V
dU = −p
dT − p
dp + dQ
∂T p
∂p T
(
)
∂U
∂V
∂U
∂V
dQ =
+p
dT +
+p
dp
∂T p
∂T p
∂p T
∂p T
∂V
dQ ∂U
+p
(3.11)
Cp =
=
dT ∂T p
∂T p
p=const
3.2.2
Ideale Gase
Zustandsgleichung: (kB : Boltzmann-Konstante)
pV = N kB T
(3.12)
Isotherme Zustandsänderung:
pV
= const.
ZV2
ZV2
dV
∆W = − pdV = N kB T
V
V1
V1
V2
p1
= −N kB T ln
= −N kB T ln
V1
p2
(3.13)
Innere Energie:
f
U = U (T ) = N kb T
2
(3.14)
Anzahl der Freiheitsgrade:
f = 3 : monoatomares Gas
f = 5 : diatomares Gas
Spezifische Wärme bei konstantem Volumen:
dU (T )
f
∂U
CV =
=
= N kB
∂T V
dT
2
CV
f kB
cV =
=
pro Masseneinheit
Nm
2 m
(3.15)
Theoretische Physik I, SS 05, H.-J. Kull
98
Spezifische Wärme bei konstantem Druck:
∂U
∂V
f
Cp =
+p
= CV + N kB =
+ 1 N kB
∂T p
∂T p
2
Cp
kB
f + 2 kB
cp =
= cV +
=
pro Masseneinheit
Nm
m
2
m
(3.16)
(3.17)
Adiabatische Zustandsänderung: dQ = 0
dU + pdV
dV
CV dT + N kB T
V
= 0;
= 0,
dU = CV dT ;
pV = N kB T
dT
2 dV
+
= 0.
T
f V
Durch Integration erhält man die Adiabatengleichungen
TV
2
f
= const.
bzw.
pV κ = const.
(3.18)
heißt Adiabatenindex. Wegen κ > 1 verlaufen die Adiabaten im (p,V)κ = f +2
f
Diagramm steiler als die Isothermen.
3.3
Zweiter Hauptsatz
Der zweite Hauptsatz der Thermodynamik bezieht sich auf die Möglichkeiten zur
Umwandlung von Wärme in Arbeit. Er schließt die Möglichkeit aus, der Umgebung
praktisch unbegrenzt Wärme zu entziehen um diese in Arbeit umzuwandeln (Perpetuum mobile 2. Art). Zur genaueren Definition des Begriffs ‘Umgebung’ verwendet
man den Begriff ‘Wärmebad’.
Wärmebad: Ein Wärmebad ist ein Körper mit einer zeitlich konstanten und überall gleichen Temperatur, der durch thermischen Kontakt Wärme aber keine Arbeit
austauschen kann.
Ein Wärmebad wird durch eine große Wassermenge realisiert, die sich praktisch
nicht ausdehnt und deren Temperatur sich beim Austausch kleiner Wärmemengen
praktisch nicht ändert.
Der zweite Hauptsatz wurde um 1850 in unterschiedlicher Form durch Lord Kelvin
(K) und durch Rudolph Clausius (C) formuliert. Nachfolgend wird gezeigt, dass
beide Aussagen äquivalent sind.
Theoretische Physik I, SS 05, H.-J. Kull
3.3.1
99
Postulat von Kelvin
(K)
3.3.2
Ein Prozess, dessen einziges Ergebnis darin besteht, aus einem
Wärmebad Wärme zu entnehmen und diese in Arbeit umzuwandeln (Abb. 3.4), ist nicht möglich.
Postulat von Clausius
(C)
Ein Prozess, dessen einziges Ergebnis darin besteht, aus einem
Wärmebad Wärme zu entnehmen und diese an ein zweites Wärmebad mit einer höheren Temperatur abzugeben (Abb. 3.4), ist nicht
möglich.
Abbildung 3.4: Wärmemaschinen, die dem 2. Hauptsatz widersprechen: Die Wärmemenge Q wird dem Wärmebad mit Temperatur t entnommen und ohne sonstige Änderungen in die Arbeit W = Q umgewandelt (links). Die Wärmemenge Q wird dem
Wärmebad mit Temperatur t1 entnommen und an ein Wärmebad mit Temperatur
t2 > t1 abgegeben (rechts).
3.4
Thermodynamischer Wirkungsgrad
Definition (Wirkungsgrad): Bei einem Kreisprozess werde vom System pro Umlauf die Wärme QAufnahme aufgenommen, die Wärme QAbgabe abgegeben und die
Theoretische Physik I, SS 05, H.-J. Kull
100
Arbeit W = QAufnahme − QAbgabe verrichtet. Der Wirkungsgrad des Kreisprozesses wird definiert als
QAbgabe
W
η=
=1−
.
(3.19)
QAufnahme
QAufnahme
Definition (2-Temperaturprozess): Ein 2-Temperaturprozess sei ein Kreisprozess, der pro Umlauf bei der konstanten Temperatur t2 die Wärme Q2 aufnimmt,
bei der konstanten Temperatur t1 < t2 die Wärme Q1 abgibt und dabei die Arbeit
W = Q2 − Q1 verrichtet.
Der Wirkungsgrad eines 2-Temperaturprozesses ist
Q1
.
η =1−
Q2
3.4.1
(3.20)
Carnot-Prozess
Ein Carnot-Prozess ist ein reversibler 2-Temperaturprozess eines gasdynamischen
Systems. Er durchläuft den von zwei Isothermen und zwei Adiabaten im p,VDiagramm umschlossenen Zyklus (Abb. 3.5):
• Isotherme Expansion: Das System expandiert entlang einer Isotherme t =
t2 von A nach B . Dabei wird vom System die Wärmemenge Q2 aufgenommen.
• Adiabatische Expansion: Das System expandiert ohne Wärmeaustausch
entlang einer Adiabate von B nach D. Dabei erniedrigt sich die Temperatur
von t2 auf t1 .
• Isotherme Kompression: Das System wird entlang einer Isotherme t = t1
von D nach C komprimiert. Dabei gibt es die Wärmemenge Q1 ab.
• Adiabatische Kompression: Das System wird entlang einer Adiabate von
C nach A komprimiert. Dabei erhöht sich die Temperatur von t1 auf t2 .
Das System kehrt nach einem Zyklus wieder in seinen Anfangszustand mit der inneren Energie UA zurück. Nach dem ersten Hauptsatz wird in einem Zyklus die
Arbeit
W = Q2 − Q1
(3.21)
verrichtet. Nach dem zweiten Hauptsatz kann Q1 nicht verschwinden, da sonst die
Wärme Q2 ohne sonstige Änderungen in Arbeit umgewandelt worden wäre. Nur
ein Teil der absorbierten Wärme Q2 kann in Arbeit umgewandelt werden. Der Wirkungsgrad der Umwandlung wird definiert durch
Q1
W
=1−
.
(3.22)
η=
Q2
Q2
Mit Hilfe eines Carnot Prozesses kann die Äquivalenz der Aussagen von Kelvin und
Clausius gezeigt werden.
Theoretische Physik I, SS 05, H.-J. Kull
101
Abbildung 3.5: Carnotscher
Kreisprozeß.
3.4.2
Äquivalenz der Aussagen von Kelvin und Clausius
Beweis: (K) ⇔ (C)
• (K) falsch ⇒ (C) falsch
Wenn (K) nicht gilt, kann man einem Wärmebad mit Temperatur t1 die
Wärmemenge Q entnehmen und diese in Arbeit W = Q umwandeln. Die
Arbeit kann man einem Wärmebad mit der Temperatur t2 > t1 vollständig
in Form von Wärme zuführen (durch Reibung). Damit wird Wärme aus einem Wärmebad niedrigerer Temperatur in ein Wärmebad höherer Temperatur
übertragen, ohne dass sich der sonstige Zustand geändert hat. Also gilt (C)
nicht. (Abb.3.6)
• (C) falsch ⇒ (K) falsch
Wenn (C) nicht gilt, kann man einem Wärmebad mit Temperatur t1 eine
Wärmemenge Q2 entnehmen und an ein Wärmebad mit Temperatur t2 > t1
abgeben. Die Wärme Q2 kann man einem Carnot-Prozess zuführen, der diese
teilweise in Arbeit W umwandelt und die restliche Energie Q1 = Q2 − W
als Wärme an das Wärmebad 1 abgibt. Damit wird dem Wärmebad 1 die
Wärmemenge Q2 − Q1 entnommen und vollständig in Arbeit umgewandelt,
ohne dass sonstige Änderungen eingetreten sind. Also gilt (K) nicht. (Abb.3.7)
Wegen “(K) falsch” ⇔ “(C) falsch” gilt auch “(K) richtig” ⇔ “(C) richtig”.
3.4.3
Carnot-Theorem
Für den Wirkungsgrad von 2-Temperaturprozessen gilt das folgende Theorem von
Carnot:
Theoretische Physik I, SS 05, H.-J. Kull
102
Abbildung 3.6: Falls Wärme
aus einem Wärmebad entnommen und vollständig in Arbeit
umgewandelt werden kann, kann
diese dazu verwendet werden einem Wärmebad höherer Temperatur dieselbe Wärmemenge zuzuführen. Dies widerspricht dem
Postulat von Clausius.
Abbildung 3.7: Falls die Wärmemenge Q2 einem Wärmebad entnommen und einem Wärmebad höherer Temperatur zugeführt
werden kann, kann man dieselbe
Wärmemenge mit einem CarnotProzess wieder entnehmen und
teilweise in Arbeit umwandeln.
Dies widerspricht dem Postulat
von Kelvin.
Theoretische Physik I, SS 05, H.-J. Kull
103
(i)
Alle reversiblen 2-Temperaturprozesse, mit gleichen Temperaturen haben
denselben Wirkungsgrad.
(ii) Der Wirkungsgrad eines irreversiblen 2-Temperaturprozesses kann nie größer
sein als der Wirkungsgrad eines reversiblen 2-Temperaturprozesses mit gleichen Temperaturen.
Beweis: Ein reversibler 2-Temperaturprozess verrichte die Arbeit W = Q2 − Q1 .
Ein zweiter beliebiger 2-Temperaturprozess verrichte die Arbeit W 0 = Q02 − Q01 .
Aus beiden Kreisprozessen kann der in (Abb.3.8) gezeigte kombinierte Kreisprozess
gebildet werden. Die Richtung des reversiblen Prozesses wurde umgekehrt, so dass
dieser die bei der oberen Temperatur durch den ersten Prozess absorbierte Wärme
Q gerade wieder zurückgibt. Nach einem Umlauf wurde nur dem unteren Wärmebad
Wärme entzogen und insgesamt die Arbeit W 0 − W verrichtet. Nach dem zweiten
Hauptsatz (K) muß
W0 − W ≤ 0
(3.23)
sein. Daher gilt:
W
W0
≤η=
η =
Q
Q
0
(3.24)
Ist der zweite Prozess reversibel, dann erhält man durch Vertauschung der beiden
Prozesse auch
η ≤ η0.
(3.25)
Daher gilt dann η = η 0 .
Abbildung 3.8: Ein beliebiger 2-Temperaturprozess entnimmt bei der Temperatur t2
die Wärmemenge Q. Ein reversibler 2-Temperaturprozess, der in der umgekehrten
Richtung läuft, gibt bei der Temperatur t2 dieselbe Wärmemenge ab. Die resultierende Arbeit beider Prozesse muß nach dem Postulat von Kelvin negativ sein. Daraus
folgt das Carnot-Theorem.
Theoretische Physik I, SS 05, H.-J. Kull
3.5
104
Thermodynamische Temperaturdefinition
Empirische Temperaturdefinition: Die Ausdehnung einer Thermometersubstanz als Funktion der Temperatur kann zur Festlegung einer empirischen Temperaturskala t verwendet werden. Diese Temperaturskala ist jedoch von den Eigenschaften der Thermometersubstanz abhängig.
Gasthermometer: Gase haben als Thermometersubstanz den Vorteil, dass sie eine
besonders einfache Zustandsgleichung besitzen:
pV = N kB T
(3.26)
Durch Messung von p und V kann die Temperatur T bestimmt werden. Die so
bestimmte Gastemperatur T kann zur Eichung anderer Thermometersubstanzen
verwendet werden. Man erhält so einen Zusammenhang der Temperaturskalen T =
T (t). Aber auch bei Gasen kann es Abweichungen vom idealen Verhalten geben.
Absolute Temperaturdefinition: Eine substanzunabhängige Definition der Temperatur folgt aus dem Carnot-Theorem. Für jeden reversiblen 2-Temperaturprozess
ist das Verhältnis
Q1
= f (t1 , t2 )
(3.27)
Q2
gleich, d.h. die Funktion f (t1 , t2 ) ist eine universelle Funktion der beiden Arbeitstemperaturen t1 und t2 .
Betreibt man einen Carnot-Prozess mit einem idealen Arbeitsgas, so findet man für
diese Funktion
T (t1 )
Q1
= f (t1 , t2 ) =
.
(3.28)
Q2
T (t2 )
Definiert man die absolute thermodynamische Temperatur entsprechend der mit
einem idealen Gasthermometer gemessenen Temperatur durch T = T (t), so gilt für
alle reversiblen 2-Temperaturprozesse:
T1
Q1
=
Q2
T2
(3.29)
Die Temperaturmessung ist damit auf die Messung von Wärmemengen zurückgeführt.
3.6
3.6.1
Entropie
Beliebige Kreisprozesse
Nach dem Carnot-Theorem gilt
η ≥ η0
(3.30)
Theoretische Physik I, SS 05, H.-J. Kull
105
wobei η den Wirkungsgrad eines reversiblen und η 0 den eines beliebigen 2Temperaturprozesses bezeichnet. Setzt man
η =1−
T1
;
T2
η0 = 1 −
Q01
;
Q02
(3.31)
so gilt die Ungleichung
T1
Q01
≤ 0
(3.32)
T2
Q2
Q02 (−Q01 )
+
≤ 0.
(3.33)
T2
T1
Diese Beziehung kann für beliebige Kreisprozesse verallgemeinert werden. Sei dQ
eine infinitesimal kleine Wärmemenge, die bei der Temperatur T vom System aufgenommen wird. Dann gilt für einen Umlauf:
I
dQ
≤0
T
(3.34)
Für reversible Prozesse gilt das Gleichheitszeichen.
Beweis:
Der Kreisprozess S nimmt bei der Temperatur T die Wärmemenge dQ auf. Wir
betrachten einen Carnot-Prozess zwischen T und T0 , der bei T die Wärmemenge
dQ abgibt und die dafür erforderliche Wärmemenge
T0
dQ0 = dQ
(3.35)
T
bei T0 aufnimmt. Nach einem Umlauf erhält man für die gesamte vom Wärmebad
T0 abgegebene Wärme
I
dQ
(3.36)
Q0 = T0
T
Nach dem ersten Hauptsatz ist die aufgenommene Wärme Q0 gleich der geleisteten
Arbeit W . Nach dem zweiten Hauptsatz ist W ≤ 0 und daher
I
dQ
≤0
(3.37)
T
Falls S reversibel ist kann der Kreisprozess in umgekehrter Richtung durchlaufen
werden, wobei dQ durch −dQ zu ersetzen ist. Dann gilt auch
I
dQ
−
≤0
(3.38)
T
und damit
I
dQ
= 0.
(3.39)
T
Theoretische Physik I, SS 05, H.-J. Kull
106
Abbildung 3.9: Ein KreisProzess S entnimmt bei der Temperatur T eine infinitesimale Wärmemenge dQ. Ein in umgekehrter Richtung laufender Carnot-Prozess gibt
dieselbe Wärmemenge wieder ab und nimmt bei einer beliebigen Referenztemperatur
T0 eine Wärmemenge dQ0 auf. Durch Integration von dQ über einen Zyklus erhält
man die gesamte bei der Temperatur T0 entnommene Wärme Q0 .
Theoretische Physik I, SS 05, H.-J. Kull
3.6.2
107
Eigenschaften der Entropie
Definition (Entropie): Das Integral
ZA
S(A) =
dQ
T
(3.40)
0
über einen reversiblen Weg von einem festen Referenzzustand 0 zum Zustand A
heißt Entropie. Die Entropie besitzt die folgenden wichtigen Eigenschaften:
Reversible Zustandsänderung: Bei einer reversiblen Zustandsänderung von A
nach B ändert sich die Entropie gemäß:
B
Z
dQ
S(B) − S(A) =
(3.41)
T
A
R
Dies bedeuted, dass die Entropieänderung genau durch die bei den jeweiligen Temperaturen ausgetauschten Wärmen bestimmt wird.
Zustandsfunktion: Die Entropie ist eine Zustandsfunktion, d.h. sie hängt nur vom
thermodynamischen Zustand des Systems ab. Betrachtet man zwei reversible Wege
von A nach B (Abb. 3.10), so gilt
B
A
Z
Z
I
dQ
dQ
dQ
+
=
T
T
T
A
I
B
II
= [S(B) − S(A)] I − [S(B) − S(A)] II = 0.
(3.42)
Abbildung 3.10: Integrationswege
im Fall zweier reversibler Zustandsänderungen von A nach B.
Irreversible Zustandsänderung:
ZB
S(B) − S(A) ≥
A
dQ
T
(3.43)
I
Theoretische Physik I, SS 05, H.-J. Kull
108
Abbildung 3.11: Übergang von A
nach B entlang einem reversiblen
(R) und einem irreversiblen (I)
Weg.
Beweis:
I
0≥
B
B
Z
Z
dQ dQ
dQ
=
−
T
T
T
A
A
I
R
B
B
Z
Z
dQ = S(B) − S(A) ≥ dQ
T
T
A
A
R
I
Die Entropieänderung ist größer als man es gemäß der auf dem irreversiblen Weg
ausgetauschten Wärme erwarten würde.
Thermisch isolierte Systeme: dQ = 0
S(B) ≥ S(A)
(3.44)
Nach jeder Zustandänderung in einem isolierten System kann die Entropie des Endzustands nie kleiner sein als die Entropie des Anfangszustands. Der Zustand eines
isolierten Systems ändert sich solange, bis die Entropie auf den maximal möglichen
Wert angewachsen ist.
Wärmeaustausch Q zwischen 2 Teilsystemen: Wärme geht durch Wärmeleitung vom wärmeren zum kälteren Körper über. Dabei nimmt die Entropie zu:
∆S =
Q
Q
−
> 0;
T1 T2
T1 < T2
(3.45)
Entropie idealer Gase:
Für eine infinitesimale reversible Zustandsänderung gilt nach dem 1. Hauptsatz und
nach der Entropiedefinition
dU = dQ − pdV,
dQ = T dS.
(3.46)
Für ideale Gase gilt
3
U = N kB T,
2
p=
N
kB T .
V
(3.47)
Theoretische Physik I, SS 05, H.-J. Kull
109
Damit erhält man für eine infinitesimale Entropieänderung das Differential
3 dT
dV
dS = N kB
+
.
(3.48)
2 T
V
Es bestimmt die Zustandsfunktionen S=S(T,V) bzw. S=S(p,V) gemäß
3
3
S = S0 + N kB ln(T V 2/3 ) = S00 + N kB ln(pV 5/3 ).
2
2
(3.49)
Die Integrationskonstanten S0 bzw. S00 können im Rahmen der Quantenmechanik
bestimmt werden. Als Ergebnis erhält man dann für die Entropie eines klassischen
idealen Gases die Formel von Sackur und Tetrode
"
e5/2 V
S = N kB ln
N
2πmkB T
h2
3/2 #
(3.50)
mit dem Planckschen Wirkungsquantum h.
3.6.3
Gleichgewicht bei Wärmeaustausch
Bringt man zwei Systeme in thermischen Kontakt, so gleichen sich die Temperaturen an. Im thermischen Gleichgewicht besitzt das Gesamtsystem eine konstante
Temperatur. Diese Gleichgewichtsbedingung folgt aus dem Extremalprinzip für die
Entropie. Die innere Energie und die Entropie seien additiv, d.h. es gilt für das
Gesamtsystem
U = U1 + U2 ,
S = S1 (U1 ) + S2 (U2 )
(3.51)
Hierbei wird vorausgesetzt, dass der Temperaturausgleich bei konstanten Volumina
V1,2 durchgeführt wird, so dass sich die Entropien nur als Funktion der inneren Energien ändern. Außerdem soll dem Gesamtsystem weder Wärme noch Arbeit zugeführt
werden. Für das Extremum der Entropie gelten dann die Bedingungen,
dS =
dS2
dS1
dU1 +
dU2 = 0
dU1
dU2
Wegen dU1 = −dU2 folgt
dU = dU1 + dU2 = 0 .
(3.52)
dS1
dS2
=
.
(3.53)
dU1
dU2
Nach dem ersten Hauptsatz gilt bei konstantem Volumen dU1,2 = dQ1,2 . Im Gleichgewicht nimmt daher
dS
1
=
(3.54)
dQ
T
in beiden Systemen den gleichen Wert an.
Theoretische Physik I, SS 05, H.-J. Kull
3.6.4
110
Gleichgewicht bei Teilchenaustausch
Gegeben seien nun zwei Systeme, die bei konstanter innerer Energie und konstantem Volumen Teilchen miteinander austauschen können, wobei die Teilchenzahl des
Gesamtsystems erhalten bleibt. Die Teilchenzahlen und die Entropien seien additiv,
N = N1 + N2 ,
S = S1 (N1 ) + S2 (N2 ) .
(3.55)
Die Extremalbedingung für die Entropie lautet nun
dS2
dS1
dN1 +
dN2 = 0
dN = dN1 + dN2 = 0 .
(3.56)
dS =
dN1
dN2
Im Gleichgewicht gilt also
dS1
dS2
=
.
(3.57)
dN1
dN2
Für Systeme mit Teilchenaustausch läßt sich der erste Hauptsatz in der folgenden
Form verallgemeinern,
dU = dQ + dW + µdN ,
(3.58)
wobei das chemische Potential µ die Energieänderung pro Teilchen bezeichnet, wenn
weder Wärme noch Arbeit zugeführt werden. Für dU = dW = 0 gilt dQ = −µdN .
Im Gleichgewicht nimmt also die Größe
dS
µ
dS
= −µ
=−
(3.59)
dN
dQ
T
in beiden Systemen denselben Wert an.
Das chemische Potential eines idealen Gases kann mit Hilfe der Formel von Sackur
und Tedrode (3.50) berechnet werden. Ersetzt man dort T durch die innerer Energie
U = 23 N kB T so gilt
5/2
3/2
e γV U 3/2
2πm
S = S(U, V, N ) = kB N ln
,
γ=
.
(3.60)
(3/2)3/2 N 5/2
h2
Die Ableitung von S nach N bei festem U und V ergibt
5/2
e γV U 3/2
5
∂S = kB ln
− kB
3/2
5/2
∂N U,V
(3/2) N
2
3/2
γV U
= kB ln
(3/2)3/2 N 5/2
γV (kB T )3/2
= kB ln
.
N
Nach (3.59) folgt damit,
N
µ = kB T ln
.
γV (kB T )3/2
(3.61)
Theoretische Physik I, SS 05, H.-J. Kull
3.6.5
111
Chemische Gleichgewichte
Die Gleichgewichtsbedingung bei Teilchenaustausch kann auf chemische Reaktionen
angewandt werden. Eine chemische Reaktionsgleichung besitzt die allgemeine Form
X
νi Ai = 0
(3.62)
wobei pro Reaktion jeweils νi Teilchen der Sorte Ai umgewandelt werden. Für die
Ausgangsstoffe wird νi positiv für die Endprodukte negativ gezählt. Nach n Reaktionen ist die Änderung der Teilchenzahl des i-ten Stoffes dNi = nνi . Die Entropie
aller Reaktanten sei additiv und nur von der Teilchenzahl abhängig,
X
S=
Si (Ni ) .
(3.63)
Im Gleichgewicht ist die Entropie extremal, d.h. es gilt
dS =
X dSi
X dSi
dNi =
nνi = 0
dNi
dNi
(3.64)
Mit dem chemischen Potential (3.59) erhält man für Reaktionsgleichgewichte die
Bedingung
X
µi νi = 0.
(3.65)
Das chemische Potential (3.61) für ideale Gase kann in der Form
µi = kB T (ln ci + ln p) + χi (T ),
X
Ni
N
,
p = kB T,
N=
Ni
χi (T ) = −kB T ln γi (kB T )5/2
N
V
angegeben werden, wobei ci die Konzentration der i-ten Teilchensorte bezeichnet.
Setzt man diesen Ausdruck in (3.65) ein, so folgt
ci =
X
X
1 X
νi ln ci = −(
νi ) ln p −
νi χi
kB T
(3.66)
Damit erhält man das Massenwirkungsgesetz
Y
cνi i
= K(p, T ),
−
K(p, T ) = e
P ν i χi
kB T
p
P1 ν
i
(3.67)
Chemische Reaktionen werden meist bei konstantem Druck und konstanter Temperatur durchgeführt. K(p, T ) wird als Massenwirkungskonstante bezeichnet.
Theoretische Physik I, SS 05, H.-J. Kull
3.6.6
112
Clausius-Clapeyron-Gleichung
Für einen Phasenübergang zwischen einer Flüssigkeit und einem Gas zeigen die
Isothermen das in Abb. (3.12) schematisch dargestellte Verhalten. Der Sättigungsdampfdruck, bei dem Gas und Flüssigkeit koexistieren, hängt nur von der Temperatur aber nicht vom Volumen ab, p = p(T ). Bei einer Vergrößerung des Volumens verdampft die Flüssigkeit solange, bis der Sättigungsdampfdruck wiederhergestellt ist.
Die Isotherme verläuft parallel zur V-Achse. Zur Bestimmung der Dampfdruckkurve
p = p(T ) kann man einen Carnot-Prozess zwischen zwei infinitesimal benachbarten
Isothermen im Phasenkoexistenzgebiet betrachten. Vergrößert man das Volumen bei
der oberen Temperatur vom Volumen VF der flüssigen Phase zum Volumen VG der
Gasphase, so wird gerade die Verdampfungswärme Q = L aufgenommen. Bei der
unteren Temperatur T − dT wird die Wärmemenge Q − dQ wieder abgegeben. Für
den gesamten Kreisprozess gilt dQ = dW , mit
dW = dp(VG − VF )
T − dT
Q − dQ
=
;
Q
T
dQ = L
dT
.
T
Daraus folgt die Clausius-Clapeyron-Gleichung,
dp
L
=
,
dT
T (VG − VF )
(3.68)
die die Steigung der Dampfdruckkurve p = p(T ) bestimmt.
Abbildung 3.12: Spezieller Carnot-Prozeß zur Herleitung der Clausius-ClapeyronGleichung.
Kapitel 4
Relativistische Mechanik
4.1
Relativitätsprinzip
Erfahrungsgemäß ist die Lichtgeschwindigkeit in allen Inertialsystemen gleich groß:
c = 2.998 · 108
km
m
≈ 300 000
.
s
s
(4.1)
Dies wurde zuerst 1887 im Experiment von Michelson und Morley nachgewiesen.
Die beobachtete Konstanz der Lichtgeschwindigkeit steht jedoch im Widerspruch
zum Galileischen Relativitätsprinzip der Newtonschen Mechanik.
Galileitransformation: Wir betrachten einen Vorschub des Koordinatensystems
S 0 mit der Geschwindigkeit v in x-Richtung:
x0 = x − vt,
t0 = t.
(4.2)
Abbildung 4.1: Bewegtes Koordinatensystem S 0 . Der Ursprung
von S’ ist gegenüber S um vt verschoben.
113
Theoretische Physik I, SS 05, H.-J. Kull
114
Die Phase Φ = kx − ωt einer Lichtwelle bestimmt die Anzahl der Wellenlängen
eines Wellenzuges. Sie muß daher unabhängig vom Bezugssystem sein. Aus dieser
Forderung ergibt sich
!
k 0 x0 − ω 0 t0 = k 0 x − (ω 0 + k 0 v)t = kx − ωt
k = k0,
ω = ω 0 + k 0 v.
(4.3)
Im Vakuum breitet sich die Lichtwelle mit der Phasengeschwindigkeit ω 0 /k 0 = ω/k =
c aus. Aufgrund der Galileitransformation (4.3) erhält man jedoch
ω
ω0 + k0v
ω0
=
=
+ v = c0 + v
(4.4)
k
k0
k0
Dies widerspricht der Beobachtung c = c0 . Einstein hat diesen Widerspruch dadurch
gelöst, dass er die Forderung nach Galilei-Invarianz durch ein neues Relativitätsprinzip (Lorentz-Invarianz) ersetzt hat. Die Konstanz der Lichtgeschwindigkeit wird
dabei als physikalisches Grundprinzip eingeführt.
c=
Einsteinsches Relativitätsprinzip (ER):
(E1) Alle Inertialsysteme sind gleichwertig.
(E2) Die Lichtgeschwindigkeit ist in allen Inertialsystemen gleich groß.
Die Transformation zwischen Inertialsystemen, die dem ER genügen, nennt
man Lorentz-Transformationen. Physikalische Gesetze, die gegenüber LorentzTransformationen invariant sind, nennt man lorentzinvariant oder relativistisch.
4.2
Lorentz-Transformation
Als Verallgemeinerung der Galileitransformation wird eine allgemeine lineare Transformation der Koordinaten angenommen:
0 0 0
0
x
x
Λ 0 Λ0 1
(4.5)
=
1
1
1
Λ0 Λ1
x
x1
Koordinaten in S : (ct, x) ≡ (x0 , x1 )
0
0
Koordinaten in S’ : (ct0 , x0 ) ≡ (x0 , x1 )
Die 4 Konstanten Λα β hängen nur von v ab. Sie werden durch folgende Forderungen
bestimmt:
0
1. Ursprung von S’: x1 = 0; x1 = vt = βx0 ; β =
v
c
0
x1 = Λ1 0 x0 + Λ1 1 x1 = 0
x1
Λ1 0 !
=
−
=β
x0
Λ1 1
(4.6)
Theoretische Physik I, SS 05, H.-J. Kull
115
0
2. Ursprung von S: x1 = 0; x1 = −vt0 = −βx0
0
0
x1
Λ1 0 !
= −β
=
x 00
Λ0 0
(4.7)
0
0
3. Invarianz der Lichtgeschwindigkeit: x1 = x0 , x1 = x0
0
x1
Λ1 0 + Λ1 1
=1
=
x 00
Λ0 0 + Λ0 1
(4.8)
Damit sind 3 der 4 Konstanten festgelegt. Setzt man γ(v) := Λ0 0 für die
verbleibende Konstante, so gilt
0 0
0
x
x
1 −β
,
=
γ(v)
−β 1
x1
x1
Λ1 1 = Λ0 0 = γ;
Λ1 0 = Λ0 1 = −βγ.
(4.9)
0
0
4. Raumspiegelung: Eine Raumspiegelung x1 → −x1 , x1 → −x1 ist äquivalent zu einer Umkehr der Geschwindigkeit v → −v. Führt man gleichzeitig
eine Raumspiegelung und eine Geschwindigkeitsumkehr durch, so muß sich das
ursprüngliche Transformationsgesetz ergeben.
0 0
0 x
x
1 β
= γ(−v)
1
β 1
−x
−x1
0
0 0
x
x
1 −β
= γ(−v)
1
−β 1
x1
x
Daraus folgt:
γ(v) = γ(−v).
5. Inverse Transformation: Die inverse Transformation
0
0 0
x
1
1
x
1 β
=
1
2
β 1
x
γ(v) 1 − β
x1
(4.10)
(4.11)
muß äquivalent sein zu einer Transformation mit der Geschwindigkeit −v.
Daraus folgt:
1
1
γ(−v) =
.
(4.12)
γ(v) 1 − β 2
Aus (4.10) und (4.12) folgt
γ=p
1
1 − β2
.
(4.13)
Theoretische Physik I, SS 05, H.-J. Kull
Die gesuchte Lorentz-Transformation ist,
0 0
0
x
x
1 −β
=γ
;
1
−β 1
x
x1
116
1
γ=p
1 − β2
;
β=
v
c
(4.14)
In expliziter Form lautet sie:
t − vx/c2
t0 = p
,
1 − v 2 /c2
x − vt
x0 = p
1 − v 2 /c2
.
(4.15)
Für kleine Geschwindigkeiten, v 2 /c2 1, geht die Lorentz-Transformation (4.15) in
die Galileitransformation (4.2) über.
Die Koordinatenachsen (x00 = 0, x10 = 0) des bewegten Systems S’ erscheinen im
Inertialsystem S gegeneinander verdreht (Abb. 4.2). Punkte t > 0, die in S am Ort
x = 0 beobachtet werden, erscheinen in S’ entlang der negativen x’-Achse. Punkte
x > 0, die in S zur Zeit t = 0 beobachtet werden, erscheinen in S’ zu früheren Zeiten
t0 < 0.
Abbildung 4.2: Koordinatenlinien x00 = const, x10 = const eines bewegten Inertialsystems S’ (rechts) im Inertialsystem S (links).
4.3
4.3.1
Der Abstand von Ereignissen
Raumzeit
Ereignis: Die Ortskoordinaten x1 , x2 , x3 und die Zeitkoordinate x0 = ct eines Inertialsystems bilden einen 4-dimensionalen Raum. Die Punkte (x0 , x1 , x2 , x3 ) dieses
Raumes nennt man Ereignisse. Betrachtet man nur Relativbewegungen in einer Koordinatenrichtung (x1 ), so können die Ereignisse (x0 , x1 ) in einer Ebene dargestellt
werden.
Theoretische Physik I, SS 05, H.-J. Kull
117
Weltlinien: Die Bahnkurve eines Teilchens im 4-dimensionalen Raum heißt Weltlinie (Abb. 4.3). Die Weltlinien eines Photons, welches sich zur Zeit t = 0 im Ursprung
befindet, liegen auf dem Lichtkegel ct = r. Die Weltlinie x = vt eines Teilchens mit
der Geschwindigkeit v < c liegt innerhalb des Lichtkegels. Ereignisse innerhalb des
Lichtkegels können vom Ursprung aus durch ein Signal, welches sich mit einer Geschwindigkeit v < c ausbreitet, erreicht werden. Ereignisse außerhalb des Lichtkegels
sind so weit vom Ursprung entfernt, dass sie durch kein Signal mit v ≤ c erreicht
werden können.
Abbildung 4.3: Die Weltlinie eines Teilchens mit der Geschwindigkeit v.
Abstand: In Analogie zum 3-dimensionalen Abstandsquadrat r2 = (x1 )2 + (x2 )2 +
(x3 )2 definiert man das 4-dimensionale Abstandsquadrat
s2 = (x0 )2 − r2 .
(4.16)
Das Vorzeichen von s2 ist Konvention. Der Vorzeichenwechsel bei den räumlichen
und zeitlichen Abstandsquadraten macht jedoch einen signifikanten Unterschied zur
euklidischen Geometrie aus, bei der alle Abstandsquadrate mit gleichem Vorzeichen
eingehen. Das vierdimensionale Abstandsquadrat ist unabhängig von der Wahl des
Inertialsystems. Nach dem Relativitätsprinzip gilt für ein Photon r = x0 und damit
s2 = 0 für alle Inertialsysteme. Aufgrund der Lorentz-Transformation sind auch
Abstände s2 6= 0 unabhängig vom Inertialsystem:
0
0
s02 = (x0 )2 − (x1 )2 = γ 2 [+(x0 − βx1 )2 − (x1 − βx0 )2 ]
= +(x0 )2 − (x1 )2 = s2 .
(4.17)
Nach dem Vorzeichen von s2 unterscheidet man:
s2 = 0 : Lichtartiger Abstand
s2 < 0 : Raumartiger Abstand
s2 > 0 : Zeitartiger Abstand
(4.18)
Da s2 invariant ist, ist diese Unterscheidung unabhängig vom Inertialsystem. Bei
raumartigen Abständen kann ein Koordinatensystem gefunden werden, in dem das
Theoretische Physik I, SS 05, H.-J. Kull
118
Ereignis (x0 , x1 ) gleichzeitig zum Ereignis (0, 0) stattfindet:
x0
(4.19)
x = γ(x − βx ) = 0 ⇒ β = 1 < 1.
x
Bei zeitartigen Abständen kann ein Koordinatensystem gefunden werden, in dem
das Ereignis (x0 , x1 ) am selben Ort wie das Ereignis (0, 0) stattfindet:
00
0
1
!
!
x10 = γ(x1 − βx0 ) = 0
⇒
β=
x1
< 1.
x0
(4.20)
Abbildung 4.4: Der Lichtkegel
trennt raumartige von zeitartigen
Abständen.
4.3.2
Längenkontraktion
Ein Stab bewege sich im Laborsystem S mit der Geschwindigkeit v in x-Richtung
(Abb.4.5a).
Längenmessung in S: Die Positionen x1 , x2 der Stabenden werden in S zur gleichen
Zeit t1 = t2 gemessen:
∆x = x2 − x1 = l,
∆t = t2 − t1 = 0
(4.21)
Der Stab ruht in einem mit v bewegten Inertialsystem. Die Länge
∆x0 = x02 − x01 = l0
(4.22)
im Ruhesystem ist die Eigenlänge des Stabes.
Lorentz-Transformation:
∆x0 = γ(∆x − v∆t)
(4.23)
0
Mit ∆x = l0 , ∆x = l und ∆t = 0 folgt
p
l = 1 − v 2 /c2 l0
(4.24)
Die Ereignisse der Messung der Stabenden finden in S 0 zu verschiedenen Zeiten statt
v
v
∆t0 = γ(∆t − 2 ∆x) = − 2 l0
(4.25)
c
c
Theoretische Physik I, SS 05, H.-J. Kull
119
Abbildung 4.5: a) bewegte Maßstäbe erscheinen verkürzt b) bewegte Uhren gehen
langsamer.
4.3.3
Zeitdilatation
Eine Uhr bewege sich in S mit der Geschwindigkeit v in x-Richtung. Zu den Zeitpunkten t1 und t2 wird der Stand der Uhr mit Uhren in S an den Orten x1 bzw.
x2 = x1 + v(t2 − t1 ) verglichen (Abb.4.5b).
Zeitintervall im Ruhesystem S 0 der Uhr:
∆t0 = ∆τ,
∆x0 = 0
(4.26)
Zeitmessung in S:
∆t;
∆x = v∆t
(4.27)
Lorentz-Transformation
∆x0 = γ(∆x − v∆t)
v
∆t0 = γ(∆t − 2 ∆x)
c
(4.28)
(4.29)
Die Uhr wird in S an verschiedenen Orten abgelesen.
∆x0 = 0 ⇒ ∆x = v∆t.
(4.30)
Damit gilt:
r
v2
v2
(4.31)
∆τ = γ(1 − 2 )∆t = 1 − 2 ∆t.
c
c
Die bewegte Uhr geht gegenüber den Uhren, die im Laborsystem ruhen nach (Zeitdehnung oder Zeitdilatation).
Theoretische Physik I, SS 05, H.-J. Kull
4.3.4
120
Eigenzeit
Die Eigenzeit τ einer Uhr wird definiert als die Zeit im Ruhesystem der Uhr:
v = 0 ⇒ ds2 = c2 dτ 2 ;
1
τ2 − τ1 = (s2 − s1 )
c
(4.32)
Die Eigenzeit ist unabhängig vom Inertialsystem, da der Abstand s2 − s1 lorentzinvariant ist.
Zeit einer bewegten Uhr: Zur Zeit t bewege sich die Uhr in S mit Geschwindigkeit v(t). Im infinitesimalen Zeitintervall dt bewegt sie sich mit der momentanen
Geschwindigkeit v(t) über eine Strecke dx = v(t)dt. In einem Inertialsystem S 0 , welches sich mit der konstanten Geschwindigkeit v0 = v(t) bewegt ist die Uhr momentan
in Ruhe. Dem Zeitintervall dt entspricht das Eigenzeitintervall
1
1√ 2 2
c dt − dx2
ds =
c
c
p
=
1 − v 2 (t)/c2 dt
dτ =
(4.33)
Für ein endliches Zeitintervall von t1 bis t2 gilt daher
Zt2 r
1−
τ=
v 2 (t)
dt.
c2
(4.34)
t1
Eine in S bewegte Uhr geht daher langsamer als eine in S ruhende Uhr.
Um den Zeitvergleich der beiden Uhren zur Zeit t1 und t2 ausführen zu können,
müssen sich die Uhren zu diesen Zeitpunkten am selben Ort befinden. Dies ist nur
möglich, falls die bewegte Uhr im Zeitintervall zwischen t1 und t2 beschleunigt wurde. Da in beschleunigten Bezugssystemen andere Gesetze gelten, ist die angezeigte
Zeitdifferenz der Uhren nicht im Widerspruch zum Relativitätsprinzip. Diejenige der
beiden Uhren, die beschleunigt wurde, geht nach.
(Zwillingsparadoxon, Lebensdauer schneller Myonen).
4.3.5
Gleichzeitigkeit
Nach dem Galileischen Relativitätsprinzip können sich die Zeiten t und t0 in zwei
Inertialsystemen nur durch eine Konstante t0 unterscheiden:
t0 = t + t0
(4.35)
Daher sind Zeitdifferenzen zwischen 2 Ereignissen in allen Inertialsystemen gleich
groß:
∆t0 = ∆t
(4.36)
Theoretische Physik I, SS 05, H.-J. Kull
121
Zwei Ereignissen, die in einem Inertialsystem gleichzeitig stattfinden, ∆t = 0, sind
dann auch in jedem anderen Inertialsystem gleichzeitig: ∆t0 = 0. Durch das Einsteinsche Relativitätsprinzip wird Gleichzeitigkeit zu einem relativen Begriff, der
vom Inertialsystem des Beobachters abhängt.
Zwei gleichzeitige Ereignisse (∆t = 0), die in S im Abstand ∆x voneinander stattfinden, treten in einem bewegten Inertialsystem S 0 im zeitlichen Abstand
∆t0 = γ(∆t −
v
v
∆x) = −γ 2 ∆x
2
c
c
(4.37)
voneinander auf. Mit
∆x0 = γ(∆x − v∆t) = γ∆x
(4.38)
erhält man in S 0 die Zeitdifferenz
∆t0 = −
v ∆x0
.
c c
(4.39)
Eine absolute Bedeutung hat nur das Abstandsquadrat ∆s2 = c2 ∆t2 − ∆x2 .
4.3.6
Additionstheorem der Geschwindigkeiten
Abbildung 4.6: Ein Teilchen bewege sich in dem Inertialsystem
S 0 mit der Geschwindigkeit v 0 .
Ein Teilchen bewege sich in mit der Geschwindigkeit v 0 in einem bewegten Bezugssystem S 0 und mit der Geschwindigkeit v im Laborsystem S. S 0 bewege sich mit der
Geschwindigkeit u in S. Dann gilt für die Transformation der Geschwindigkeit
x0 = γ(x − ut)
ux 0
t = γ t− 2
c
0
x
x
− ut
v−u
v0 = 0 =
ux =
t
t − c2
1 − uv
c2
(4.40)
Theoretische Physik I, SS 05, H.-J. Kull
122
In umgekehrter Richtung gilt
x = γ(x0 + ut0 )
ux0
0
t = γ t + 2
c
0
x
x + ut0
v0 + u
v =
= 0 ux0 =
0 .
t
t + c2
1 + uv
2
c
(4.41)
Für uv 0 c2 erhält man näherungsweise das klassische Additionstheorem v = u+v 0 .
Für u → c oder v 0 → c gilt immer v → c, so das die Lichtgeschwindigkeit nicht
überschritten wird.
4.4
Minkowski-Raum
Die Relativitätstheorie zeigt, dass Raum und Zeit bei Lorentztransformationen nicht
unabhängig voneinander sind. Es ist naheliegend den dreidimensionalen Raum zu
einer vierdimensionalen Raumzeit zu erweitern. Die Geometrie der Raumzeit erweist sich als die grundlegende Eigenschaft zur Beschreibung der Gravitation. Im
allgemeinen handelt es sich hierbei um nichteuklidische Geometrien, die durch die
Verteilung der Massen im Universum bestimmt werden. Nach dem Einsteinschen
Äquivalenzprinzip kann man jedoch immer lokal Inertialsysteme einführen, in denen keine Gravitation auftritt. Die spezielle Geometrie der Raumzeit eines lokalen
Inertialsystems wird als Lorentz-Minkowski Geometrie bezeichnet.
4.4.1
Lorentz-Minkowski-Metrik
Die Geometrie eines Raumes wird durch seine Metrik bestimmt. Die Metrik ist eine
Matrix gαβ , die das Abstandsquadrat infinitesimal benachbarter Punkte in beliebigen krummlinigen Koordinatensystemen definiert,
2
ds =
3 X
3
X
gαβ dxα dxβ ≡ gαβ dxα dxβ .
(4.42)
α=0 β=0
Hier und im folgenden gilt die Summenkonvention, dass über paarweise auftretende
untere und obere Indizes summiert wird.
Der Minkowski-Raum ist ein vierdimensionaler Raum, in dem wir ein kartesisches
Koordinatensystem mit den Raum-Zeit-Koordinaten xα wählen. Die griechischen
Indizes durchlaufen die Werte 0, 1, 2, 3. Im Minkowski-Raum ist das Abstandsquadrat
ds2 = (dx0 )2 − (dx1 )2 − (dx2 )2 − (dx3 )2 .
(4.43)
Theoretische Physik I, SS 05, H.-J. Kull
123
Die zugehörige Metrik ηαβ besitzt die Form
ds2 = −ηαβ dxα dxβ ,
4.4.2
ηαβ
−1
0
=
0
0
0
1
0
0
0
0
1
0
0
0
.
0
1
(4.44)
Lorentz-Poincaré-Gruppe
Nachdem die Geometrie der Raumzeit eines Inertialsystems festgelegt wurde, lassen
sich Lorentztransformationen als Koordinatentransformationen zwischen Inertialsystemen einführen. Eine Lorentztransformation ist eine lineare Koordinatentransformation,
x0α = Λα β xβ ,
(4.45)
die ein Inertialsystem S in ein neues Inertialsystem S 0 überführt. Dabei bleiben Abstandsquadrate zwischen beliebigen Ereignispunkten invariant. Da die Matrix Λα β
unabhängig von xα ist, gilt für alle Koordinatendifferenzen und Koordinatendifferentiale dasselbe Transformationsgesetz (4.45). Es genügt daher die Invarianz des
Abstandsquadrates für infinitesimal benachbarte Punkte zu betrachten,
ds02 = ds2 ,
(4.46)
ds02 = −ηαβ dx0α dx0β = −ηαβ Λα µ Λβ ν dxµ dxν
ds2 = −ηµν dxµ dxν .
Aus einem Vergleich dieser Ausdrücke für beliebige dxµ folgt für eine Lorentztransformation die Bedingung,
ηµν = ηαβ Λα µ Λβ ν ,
η = ΛT · η · Λ.
(4.47)
Lorentztransformationen stellen eine Verallgemeinerung der orthogonalen Transformationen (2.68) dar. Wie diese bilden sie eine Gruppe. Die Gruppe der orthogonalen
Transformationen (Drehungen, Spiegelungen) ist eine Untergruppe der Lorentzgruppe. Die Abgeschlossenheit der Elemente der Gruppe zeigt man in der folgenden
Weise. Seien Λ und Λ0 zwei Lorentztransformationen. Dann ist auch das Produkt
Λ00 = Λ0 · Λ eine Lorentztransformation:
Λ00T · η · Λ = ΛT · Λ0T · η · Λ0 · Λ = ΛT · η · Λ = η .
(4.48)
Theoretische Physik I, SS 05, H.-J. Kull
124
Lorentz-Boost
Lorentztransformationen von einem Inertialsystem S in ein bewegtes Inertialsystem
S’ mit parallelen Achsen werden als Boost (Vorschub) bezeichnet. In dem speziellen
Koordinatensystem in dem die Geschwindigkeit von S’ entlang der x1 -Achse gerichtet
ist, gilt
x00
x01
x02
x03
=
=
=
=
γ(x0 − βx1 )
γ(x1 − βx0 )
x2
x3 .
(4.49)
Ersetzt man hier x1 durch die Parallelkomponente des Ortsvektors r zum Vektor β
x1 =
β(β · r)
β2
und schreibt
x01 = x1 + (γ − 1)x1 − γβx0
so folgt
x00 = γ(x0 − β · r)
β(β · r)
− γβx0 .
r 0 = r + (γ − 1)
β2
(4.50)
Diese vektorielle Form des Lorentz-Boosts ist unabhängig von den Raumkoordinaten
und gilt daher auch bei beliebiger Orientierung von β relativ zu den Koordinatenachsen. Die zugehörige Abbildungsmatrix ist
γ
−γβ 1
−γβ 2
−γβ 3
−γβ 1
.
Λ(v) =
(4.51)
β
β
(γ−1)
i
j
2
−γβ
δij +
2
β
−γβ 3
Poincaré-Transformation
Eine Koordinatentransformation
x0α = Λα β xβ + aα ,
(4.52)
wird als Poincaré-Transformation bezeichnet. Hierbei wird der Ursprung xα = 0
von S auf einen beliebigen Bezugspunkt x0α = aα abgebildet. Aus der Invarianz des
Abstandsquadrats gegenüber Poincaré-Transformationen ergibt sich dieselbe Bedingung wie in (4.47). Man bezeichnet auch Transformationen mit aα = 0 als homogene
Lorentztransformationen und Transformationen mit aα 6= 0 als inhomogene Lorentztransformationen.
Theoretische Physik I, SS 05, H.-J. Kull
4.4.3
125
Vierer-Vektoren und Lorentz-Skalare
Im Minkowski-Raum können 4-komponentige Vektoren eingeführt werden. Zum Beispiel können zwei infinitesimal benachbarte Ereignisse durch einen Verschiebungsvektor
0
dx
dx1
(4.53)
dx = (dxα ) =
dx2
dx3
verbunden werden. Die Ereignisse und der Verschiebungsvektor haben eine koordinatenunabhängige Bedeutung. Wählt man ein anderes Inertialsystem als Bezugssystem, so ändern sich aber die Komponenten des Vektors,
dx0α = Λα β dxβ .
(4.54)
Die definierende Eigenschaft eines 4er-Vektors ist das Transformationsverhalten bei
Lorentztransformationen. Ein 4er-Vektor ist eine 4-komponentige Größe, die sich bei
einer Lorentztransformation wie die Koordinatendifferentiale transformiert,
a0α = Λα β aβ .
a = (aα ),
(4.55)
Ein Beispiel ist der Vektor der 4er-Geschwindigkeit,
u=
dx
.
dτ
(4.56)
Hierbei ist dx der Verschiebungsvektor entlang der Weltlinie eines Teilchens und
dτ das Eigenzeitintervall, das im Ruhesystem des Teilchens gemessen wird. Da das
Eigenzeitintervall lorentzinvariant ist, gilt bei Lorentztransformation,
u0α =
Λα β dxβ
dx0α
=
= Λα β u β .
0
dτ
dτ
(4.57)
Die Komponenten der 4er-Geschwindigkeit können durch die Teilchengeschwindigkeit v = dr/dt und die Lichtgeschwindigkeit c = dx0 /dt ausgedrückt werden,
dx
dx
u=
=γ
=γ
dτ
dt
c
v
.
(4.58)
Der 4er-Impuls wird definiert durch
p = mu,
(4.59)
Theoretische Physik I, SS 05, H.-J. Kull
126
wobei m die Masse im Ruhesystem des Teilchen ist. Da m lorentzinvariant ist, ist
auch der 4er-Impuls ein 4er-Vektor.
Größen, die invariant sind gegenüber Lorentz-Transformationen heißen LorentzSkalare. Beispiele sind die Lichtgeschwindigkeit c, die Ruhemasse m, das Abstandsinterval ds bzw. das Eigenzeitinterval dτ . Für zwei 4er-Vektoren a und b definiert
man das Skalarprodukt
a · b = ηαβ aα bβ = −a0 b0 + a1 b1 + a2 b2 + a3 b3 .
(4.60)
Das Skalarprodukt ist ein Lorentz-Skalar, denn es gilt wegen (4.47)
ηαβ a0α b0β = ηαβ Λα µ Λβ ν aµ bν = ηµν aµ bν .
(4.61)
Nachfolgend einige Beispiele für Skalarprodukte mit der 4er-Geschwindigkeit. Man
berechnet sie am einfachsten im Ruhesystem mit u0 = c und u1 = u2 = u3 = 0:
u · u = −c2 ,
u · p = −c2 m,
u · dx = −c2 dτ .
(4.62)
Kovariante und kontravariante Vektorkomponenten
Vektorkomponenten aα mit oberem Index werden als kontravariante Komponenten
bezeichnet und von den kovarianten Vektorkomponenten mit unterem Index unterschieden. Die kovarianten Komponenten definiert man durch,
−a0
a1
(4.63)
aα = ηαβ aβ =
a2 .
a3
Umgekehrt erhält man aus den kovarianten Komponenten die kontravarianten durch
−a0
a1
aα = η αβ aβ =
(4.64)
a2 ,
a3
wobei (η αβ ) die zu (ηαβ ) inverse Matrix bezeichnet. Für die spezielle Form der Metrik
ist η αβ = ηαβ , denn es gilt
−1 0 0 0
−1 0 0 0
1 0 0 0
0 1 0 0 0 1 0 0 0 1 0 0
0 0 1 0 · 0 0 1 0 = 0 0 1 0 .
0 0 0 1
0 0 0 1
0 0 0 1
Theoretische Physik I, SS 05, H.-J. Kull
127
Damit kann das Skalarprodukt in der üblichen Weise als Produkt eines kovarianten
Zeilenvektors mit einem kontravarianten Spaltenvektor geschrieben werden
0
a
a1
a · b = ηαβ aα bβ = aα aα = (a0 , a1 , a2 , a3 ) ·
(4.65)
a2 .
a3
4.5
4.5.1
Relativistische Mechanik
Kovarianz
Gleichungen zwischen Skalaren, Vektoren oder allgemeiner Tensoren in der 4dimensionalen Raumzeit sind gegenüber Lorentz-Transformationen forminvariant.
Man nennt solche Gleichungen auch kovariant. Eine kovariante Gleichung ist z.B.
aµ = b µ .
(4.66)
In einem anderen Inertialsystem S 0 gilt dann entsprechend
0
aµ = b µ
0
(4.67)
für die transformierten Komponenten
0
aµ = Λ µ ν aν ,
0
b µ = Λµ ν b ν .
(4.68)
Aus dem Einsteinschen Relativitätsprinzip ergibt sich die weitreichende Forderung,
dass die Newtonsche Bewegungsgleichung revidiert und durch eine kovariante Bewegungsgleichung ersetzt werden muß.
4.5.2
Kovariante Bewegungsgleichung
Verallgemeinert man die Newtonsche Bewegungsgleichung auf 4er-Vektoren dann
lautet sie,
dp
=F.
dτ
(4.69)
Die Ableitung eines 4er-Impulses nach der Eigenzeit ist ein 4er-Vektor, der einer
4er-Kraft F gleichzusetzen ist. Die Komponenten der Viererkraft kann man im momentanen Ruhesystem S 0 des Teilchens bestimmen, da dort die nichtrelativistische
Form gültig sein muss. In S 0 erhält man aus (4.69)
dmc
= 0,
dt0
dp
=K
dt0
Theoretische Physik I, SS 05, H.-J. Kull
128
wobei K die Newtonsche Kraft darstellt. Damit besitzt die 4er-Kraft im momentanten Ruhesystem die Komponenten
F 00 = 0,
F0 = K
In S 0 bewegt sich das Laborsystem S mit der Geschwindigkeit −v. Die Komponenten
der 4er-Kraft im Laborsystem S erhält man mit (4.50),
F 0 = γ(F 00 + β · F 0 ) = γβ · K
β(β · F 0 )
v(v · K)
F = F 0 + (γ − 1)
+ γβF 00 = K + (γ − 1)
.
2
β
v2
(4.70)
Zusammengefasst gilt: Bewegt sich ein Teilchen in einem Inertialsystem S momentan
mit der Geschwindigkeit v so wirkt auf das Teilchen die momentante 4er-Kraft,
v·K
γ
c
F=
v(v · K) .
K⊥ + γ
v2
(4.71)
Hierbei bezeichnet K die Newtonsche Kraft im momentanten Ruhesystem S 0 und
K⊥ ihre Komponente senkrecht zur Bewegungsrichtung.
Komponenten der Bewegungsgleichung
Die kovarinate Bewegungsgleichung besitzt 4-Komponenten, die man in einem Inertialsystem S auf folgende Weise angeben kann. Dabei ist zu beachten, dass das Eigenzeitintervall dτ mit dem Koordinatenzeitintervall dt gemäß (4.33) zusammenhängt.
0-Komponente:
γ
v·K
d
(mγc) = γ
,
dt
c
dγmc2
= v · K.
dt
(4.72)
Komponente k v:
d
γ
(mγv)
= γKk ,
dt
k
Komponente ⊥ v:
d
γ
(mγv)
= K ⊥,
dt
⊥
d
p = Kk .
dt k
(4.73)
d
1
p = K ⊥.
dt ⊥ γ
(4.74)
Theoretische Physik I, SS 05, H.-J. Kull
129
Man definiert die relativistische Energie E und den relativistischen Impuls p durch
E = γmc2 ,
p = γmv.
(4.75)
Die zeitliche Komponente der Bewegungsgleichung stellt den Energiesatz, die räumlichen Komponenten den Impulssatz dar.
Lorentz-Kraft
Die Bewegungsgleichung einer Ladung q im elektrischen Feld E und Magnetfeld B
erhält man in folgender Weise. Das elektrische Feld im momentanen Ruhesystem
sei E 0 . Die Kraft auf eine ruhende Ladung wird ausschließlich durch das elektrische
Feld bestimmt,
K = qE 0 .
(4.76)
In der Elektrodynamik wird gezeigt, dass sich elektrische Felder beim Übergang in
ein bewegtes Bezugssystem ebenfalls transformieren. Die Transformation für den
Übergang von S nach S 0 lautet
Ek0 = Ek ,
1
E⊥0 = γ(E⊥ + v × B)
c
Damit erhält man die Komponenten der 4er-Kraft
1
qv · E
c
.
F=γ
1
q(E + c v × B)
(4.77)
(4.78)
Der Energie- und Impulssatz lautet in diesem Fall
d
(mγc2 ) = qE · v.
dt
d
v
(mγv) = q E + ×B .
dt
c
(4.79)
Energie-Impulsbeziehung
Der relativistische Impuls p = mγv und die relativistische Energie E = mγc2 sind
Komponenten des 4er-Impulses,
!
E
p=
.
(4.80)
c
p
Theoretische Physik I, SS 05, H.-J. Kull
130
Die Energie im Ruhesystem, ER = mc2 , heißt Ruheenergie, E − ER = m(γ − 1)c2
heißt kinetische Energie. Zwischen Energie und Impuls besteht die relativistische
Energie-Impulsbeziehung:
E2
+ p2 = −m2 c2
c2
p
mc2 +
2
4
2
2
m c +p c →
E =
pc
p·p = −
p2
2m
; pm
; pm
(4.81)
Bei der Bewegung eines einzelnen Teilchens ist die Ruheenergie nur eine additive
Konstante. Ihre wichtige Rolle erkennt man jedoch bei Reaktionen die zur Umwandlung von Teilchen führen. Als Beispiel betrachte man ein ruhendes Teilchen
mit der Masse M , das in zwei Teilchen mit den Ruhemassen m1 und m2 zerfällt.
Beim Zerfall ist die relativistische Energie erhalten,
E = M c2 = m1 c2 + m1 c2 + m1 (γ1 − 1)c2 + m2 (γ2 − 1)c2 .
(4.82)
Die Ruhemasse ist dagegen keine Erhaltungsgröße,
M = m1 + m2 + ∆m,
∆m = m1 (γ1 − 1) + m2 (γ2 − 1).
(4.83)
Der Massendefekt ∆m ist auf die unterschiedlich starken Bindungsenergien der einzelnen Teilchen zurückzuführen (Kernspaltung).