Das Dreikörperproblem
Werbung

Das Dreikörperproblem:
Eine Veranschaulichung von Problemen und
Lösungsverfahren der Numerik zum Lösen von
Differentialgleichungen
Jan Heidemeier1
5.4.2000
1
Für die Betreuung und Hilfe bei der Erstellung dieser Arbeit möchte ich Herrn Dr. Brenner
ganz herzlich danken.
ii
Inhaltsverzeichnis
1
2
3
Einleitung
1.1 Die Geschichte des Dreikörperproblems . . . . .
1.2 Physik . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Ort – Geschwindigkeit – Beschleunigung
1.2.2 Die Keplerschen Gesetze . . . . . . . . .
1.2.3 Die Newtonschen Axiome . . . . . . . .
1.2.4 Gravitationskraft . . . . . . . . . . . . .
1.2.5 Die Gravitationskonstante . . . . . . . .
1.2.6 Die Stabilität des Sonnensystems . . . .
1.3 Mathematik . . . . . . . . . . . . . . . . . . . .
1.3.1 Die Gravitationskonstante . . . . . . . .
1.3.2 Differentialgleichungen . . . . . . . . .
1.3.3 Numerik . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
4
4
5
6
7
7
8
8
8
9
11
Numerische Integration
2.1 Ein erstes Verfahren — Riemann–Summen . . . . . . . . . . . . . .
2.1.1 Die Abhängigkeit vom Zwischenvektor . . . . . . . . . . . .
2.2 Fehlerabschätzung . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Verfahren höherer Ordnung . . . . . . . . . . . . . . . . . . . . . . .
2.4 Integration mit den Gauß–Formeln . . . . . . . . . . . . . . . . . . .
2.5 Bewertung numerischer Ergebnisse . . . . . . . . . . . . . . . . . . .
2.6 Integration ohne Stammfunktion . . . . . . . . . . . . . . . . . . . .
2.7 Numerische Integration und numerisches Lösen von Differentialgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
13
14
17
18
18
20
21
Das Federpendel
3.1 Grundlagen . . . . . . . . . . . . . . . . . . .
3.2 Die Bewegungsgleichung . . . . . . . . . . . .
3.3 Einfache numerische Lösung . . . . . . . . . .
3.4 2-Schritt-Verfahren . . . . . . . . . . . . . . .
3.5 Mehrschrittverfahren . . . . . . . . . . . . . .
3.6 Die Ordnung eines 1-Schritt-Verfahren . . . . .
3.7 Verfahren höherer Ordnung . . . . . . . . . . .
3.8 Vergleich Mehrschritt- und 1-Schritt-Verfahren
23
23
23
25
27
27
29
30
31
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
22
INHALTSVERZEICHNIS
iv
4
Planetenbahnen
4.1 Analytische Lösung . . . . . . . . . . . . . . . . . . . . . . .
4.2 Bewegungsgleichungen . . . . . . . . . . . . . . . . . . . . .
4.3 Erste Planetenbahnen . . . . . . . . . . . . . . . . . . . . . .
4.4 Polarkoordinaten . . . . . . . . . . . . . . . . . . . . . . . .
4.5 Ellipsenbahnen . . . . . . . . . . . . . . . . . . . . . . . . .
4.6 Verfahren 2. Ordnung . . . . . . . . . . . . . . . . . . . . . .
4.7 Verfahren höherer Ordnung . . . . . . . . . . . . . . . . . . .
4.7.1 Theorie . . . . . . . . . . . . . . . . . . . . . . . . .
4.8 Runge-Kutta-Verfahren n-ter Ordnung . . . . . . . . . . . . .
4.8.1 Der allgemeine Ansatz . . . . . . . . . . . . . . . . .
4.8.2 Der spezielle Runge-Kutta-Ansatz . . . . . . . . . . .
4.8.3 Aufstellen der Runge-Kutta-Formeln . . . . . . . . . .
4.8.4 Praktische Durchführung des Runge-Kutta-Verfahrens
4.8.5 Vorteile gegenüber MATLAB . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
33
33
35
36
38
39
40
42
42
45
45
46
47
48
50
5
Erweiterungen
5.1 Schrittweitensteuerung . . . . . . . . . . . . . . . . .
5.1.1 Die Konvergenz von Einschrittverfahren . . . .
5.1.2 Schrittweitensteuerung in der Praxis . . . . . .
5.1.3 Beispiel . . . . . . . . . . . . . . . . . . . . .
5.2 Regulierung . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Rundungsfehlereinfluss bei Einschrittverfahren
5.2.2 Beispiel . . . . . . . . . . . . . . . . . . . . .
5.2.3 Darstellung in der Hamiltonschen Mechanik .
5.2.4 Durchführung . . . . . . . . . . . . . . . . . .
5.2.5 Rücktransformation . . . . . . . . . . . . . . .
5.2.6 Ergebnisse . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
51
51
51
52
54
54
55
56
56
56
57
58
6
Das eingeschränkte Dreikörperproblem
6.1 Einleitung . . . . . . . . . . . . . .
6.2 Das Zweikörperproblem . . . . . .
6.2.1 Die reduzierte Masse . . . .
6.3 Die Bewegungsgleichungen . . . .
6.4 Sonne–Erde–Mond . . . . . . . . .
6.5 Die Reise zum Mond . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
61
61
61
63
63
63
65
7
Das Dreikörperproblem
7.1 Fremde Welten . . . . . . . . . . . . . . . . . . . .
7.1.1 Raketenantrieb . . . . . . . . . . . . . . . .
7.2 Ein Spezialfall des Dreikörperproblems . . . . . . .
7.2.1 Startwerte und Bewegungsgleichung . . . . .
7.2.2 Lösen von Differentialgleichungen mit
Matlab . . . . . . . . . . . . . . . . . . . .
7.2.3 Darstellung in der Hamiltonschen Mechanik
7.2.4 Regulierung . . . . . . . . . . . . . . . . . .
7.2.5 Lösung . . . . . . . . . . . . . . . . . . . .
7.2.6 Rücktransformation . . . . . . . . . . . . . .
7.2.7 Beurteilung der Ergebnisse . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
73
73
75
76
76
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
77
78
80
81
81
82
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
INHALTSVERZEICHNIS
v
A Numerik mit Excel
A.1 VBA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Animationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
85
85
87
B Excel und LATEX
B.1 Tabellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 Diagramme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
89
89
91
vi
INHALTSVERZEICHNIS
Abbildungsverzeichnis
1.1
1.2
Ellipse mit Brennpunkten und Halbachse a . . . . . . . . . . . . . .
Harmonischer Oszillator 0<t<3 . . . . . . . . . . . . . . . . . . . . .
5
10
2.1
2.2
2.3
Mittelpunkts– und Trapezregel . . . . . . . . . . . . . . . . . . . . .
Erläuterung der Mittelpunktsregel . . . . . . . . . . . . . . . . . . .
Funktion mit schwieriger Fehlerabschätzung . . . . . . . . . . . . . .
16
16
21
3.1
3.2
3.3
Das Federpendel . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Erste Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
verschiedene Interpolationenen . . . . . . . . . . . . . . . . . . . . .
24
26
28
4.1
4.2
4.3
4.4
4.5
Werte einer Planetenbahn . . . . . . . . . . . . . . . . . .
Planetenbahn . . . . . . . . . . . . . . . . . . . . . . . .
Zeitabhängigkeit der x0 Komponente . . . . . . . . . . . .
Vergleich verschiedener Vorbeiflüge, Einschrittverfahren .
Vergleich verschiedener Vorbeiflüge, Zweischrittverfahren
.
.
.
.
.
34
37
38
40
41
5.1
5.2
Bahn in transformierten Koordinaten . . . . . . . . . . . . . . . . . .
Vergleich reguliert und nicht-reguliert . . . . . . . . . . . . . . . . .
58
59
6.1
6.2
6.3
6.4
6.5
6.6
6.7
Kräfte zwischen 3 Körpern . . . .
Die Bahn des Mondes . . . . . . .
Die Bahn der Erde . . . . . . . .
Bahn im Bereich 0.55 < t < 1.35
Bahn im Bereich 4.2 < t < 8.7 . .
Bahn im Bereich 16.3 < t < 17.8
Die Landung . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
64
66
67
68
68
69
70
7.1
7.2
7.3
7.4
7.5
7.6
7.7
7.8
Schwung holen, 6.5 < t < 6.6 . .
Schwung holen, 74.8 < t < 76 . .
Pythagorassche Anfangswerte . .
53 < t < 55 mit ode113 . . . . .
regulierte Schrittweiten . . . . . .
nichtregulierte Schrittweiten . . .
Bahnen im Zeitraum 2 < t < 4 . .
Bahnen im Zeitraum 50 < t < 60
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
74
75
77
79
82
83
83
84
B.1 Erstellen einer Tabelle . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 Erstellen eines Diagramms . . . . . . . . . . . . . . . . . . . . . . .
90
91
vii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
viii
ABBILDUNGSVERZEICHNIS
B.3 Beispieldiagramm . . . . . . . . . . . . . . . . . . . . . . . . . . . .
92
Tabellenverzeichnis
2.1
2.2
2.3
Ergebnisse der Integration mit Riemann–Summen . . . . . . . . . . .
Ergebnisse Trapezregel . . . . . . . . . . . . . . . . . . . . . . . . .
Vergleich Trapez– und Simpson–Verfahren . . . . . . . . . . . . . . .
14
17
20
3.1
3.2
3.3
Vergleich zweier Verfahren . . . . . . . . . . . . . . . . . . . . . . .
Ergebnisse von Mehrschrittverfahren . . . . . . . . . . . . . . . . . .
Vergleich Verfahren verschiedener Ordnung . . . . . . . . . . . . . .
27
29
31
4.1
4.2
4.3
4.4
4.5
Vergleich mit und ohne Schrittweitensteuerung . . . . .
Schema für das modifizierte Euler-Verfahren . . . . . .
Ergebnis eines modifizierten Euler-Verfahren . . . . . .
Beispielrechnung zum Runge-Kutta-Verfahren . . . . . .
Runge-Kutta-Verfahren mit verschiedenen Schrittweiten .
.
.
.
.
.
42
44
44
49
49
5.1
5.2
Vergleich mit und ohne Schrittweitensteuerung . . . . . . . . . . . .
Ohne Regulierung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
56
6.1
Daten der Landung . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
7.1
7.2
7.3
Entfernung von der Erde . . . . . . . . . . . . . . . . . . . . . . . .
MATLAB-Funktionen ode113 und ode45 . . . . . . . . . . . . . . .
Eigener Algorithmus . . . . . . . . . . . . . . . . . . . . . . . . . .
75
77
78
B.1 Beispieltabelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
90
ix
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Zusammenfassung
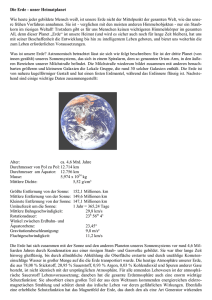
Das Dreikörperproblem gehört zu der Sorte von Problemen, die so anschaulich sind,
dass auch „Nichteingeweihte“ leicht Zugang dazu finden. Es ist aber auch ein Problem,
dass sich dauerhaft einer kompletten Lösung widersetzen konnte und sehr komplex
werden kann. In dieser Staatsexamensarbeit stelle ich einige Verfahren zur Berechnung
von Planetenbahnen zusammen. Sämtliche Rechnungen, Diagramme und Tabellen habe ich mit der bekannten Tabellenkalkulation Excel erstellt und hoffe, dadurch den
Stoff zugänglicher zu machen.
2
TABELLENVERZEICHNIS
Kapitel 1
Einleitung
1.1 Die Geschichte des Dreikörperproblems
Die Geschichte des Dreikörperproblems ist eng verwandt mit der Geschichte der Himmelskörpermechanik und kann nach Victor Szebehely [11] in vier Abschnitte unterteilt
werden. Der erste Abschnitt steht für einen Zeitraum von ungefähr 2000 Jahren. Er
beginnt bei Aristoteles und umfasst Ptolemaeus, Copernicus, Brahe, Galileo und Kepler. Der zweite Abschnitt ist aus wissenschaftlicher Sicht der interessanteste und wird
oft als der klassische Abschnitt bezeichnet. Er beginnt mit Newton und schließt mit
Descartes, Leibniz, Halley, Euler, Clairaut, D’Alembert, Lagrange, Laplace, Legendre, Gauss, Poisson, Encke und Hamilton.
Der dritte Abschnitt repräsentiert die Moderne. In dieser Zeit haben Wissenschaftler
wie Hill, Tisserand, Poincaré, Moulton, Whittaker und Birkhoff gewirkt.
Die vierte Gruppe wirkte im späten 20. Jahrhundert. Dazu zählen Leute wie Arnold,
Brouwer, Duboshin, Herget, Herrick, Kolmogorov, Moser, Siegel und Wintner.
Aristoteles (384–322 v.Chr.) war einer der großen griechischen Philosophen und
führte die Idee eines geozentrischen Sonnensystems ein. Er stellte aber auch das Gesetz
auf, dass verschieden schwere Körper verschieden schnell fallen. Aristoteles war kein
Physiker in dem Sinne, dass er Experimente und Messungen durchführte.
Andere griechische Philosophen hatten bereits im 3. Jahrhundert v.Chr. die Idee von
einem heliozentrischen Sonnensystem.
Nicolaus Copernicus (1473–1543) stammte wahrscheinlich aus Polen und war
wahrscheinlich der erste wissenschaftliche Befürworter eines heliozentrischen Sonnensystems. Er betonte dabei die Einfachheit dieses Modells. Er selbst fürchtete sich davor,
für seine Ideen ausgelacht zu werden. Sein Buch De Revolutionibus Orbium Coelestium, in dem er annahm, dass alle Planeten auf Kreisbahnen die Sonne umkreisen, wurde
erst nach seinem Tod veröffentlicht. Es wurde 1616 von der katholischen Kirche verboten.
Der deutsche Astronom Johannes Kepler (1571–1630) machte den nächsten wichtige Schritt. Er fügte zum heliozentrischen Sonnensystem die Idee elliptischer Bahnen
hinzu. Seine drei Keplerschen Gesetze (siehe Abschnitt 1.2.2) der planetaren Bewegung werden noch heute gelehrt und benutzt.
Galileo Galilei (1564–1642) stammte aus Pisa und ist einer der Väter der Dynamik
und des heliozentrischen Sonnensystems. Er gilt als Vordenker von Newton, schrieb
wichtige Bücher, auch über Mathematik, und erfand das Teleskop. In seinen letzten
3
KAPITEL 1. EINLEITUNG
4
Lebensjahren geriet er in Konflikt mit der Kirche. Der berühmte Satz „Und sie bewegt sich doch!“ und sein Märtyrertum für die Wissenschaft sind allerdings wohl nur
erfunden [13].
Sir Isaac Newtons (1642–1727) Beitrag zur Wissenschaft gilt als Beginn einer
völlig neuen (Himmelskörper–) Mechanik, ja sogar einer neuen Bedeutung von „Wissenschaft“. Alexander Pope schrieb
Nature and nature’s laws lay hid in night.
God said ‘let Newton be’, and all was light.“.
Newton war einer der ersten Wissenschaftler, der das Dreikörperproblem Sonne–Erde–
Mond untersuchte. Er beklagte sich, dass das Problem ihm Kopfschmerzen und Schlaflosigkeit bereitet. Letztendlich war er jedoch immerhin in der Lage, die erdnahen Punkte der Mondbahn auf 8% genau vorherzusagen. Er stellte die nach ihm benannten Newtonschen Axiome (siehe Abschnitt 1.2.3) und eine Gleichung für die Gravitationskraft
(siehe Abschnitt 1.2.4) auf. Er schrieb die drei berühmten Bände der „ Philosophiae
Naturalis Principia Mathematica“. Die Himmelsmechanik und das Gesetz der Gravitationskraft wird in Band III behandelt. Bis zur Entdeckung der speziellen Relativitätstheorie durch Albert Einstein galt die Mechanik als komplett durch Newton’s Gesetze
„gelöst“. Newton selbst sagte bescheidener:
I seem to have been only like a boy playing on the seashore and diverting
myself in now and then finding a smoother pebble or a prettier shell than
ordinary while the great ocean of truth lay all undiscovered before me.
Der englische Astronom Edmond Halley (1656-1742), nach dem der Halleysche Komet
benannt ist, war ein ergebener Bewunderer Newtons und finanzierte dessen Publikationen aus eigener Tasche. Newton starb 1727 und liegt im Westminster Abbey in London
begraben.
Leonhard Euler (1707-1783) schlug das sehr spezielle Dreikörperproblem, bekannt als „Das Problem der zwei fixierten Kraftzentren“, vor, das mit elliptischen Funktionen komplett lösbar ist. Außerdem benutzte er als Erster rotierende Bezugssysteme,
um das eingeschränkte Dreikörperproblem (siehe Abschnitt 6) zu untersuchen. Seine
Arbeit über die Bewegung des Mondes fand schnell Anwendung in der Navigation. In
der Mathematik arbeitete Euler auch an Verfahren zum numerischen Lösen von Differentialgleichungen (siehe Abschnitt 3.3). Einige Jahre vor seinem Tod wurde er blind,
was jedoch seine Schaffenskraft nicht beeinflusste.
Henri Poincaré (1854–1912) gehörte zu den fleißigsten Autoren in der Wissenschaft. Er schrieb mehr als 30 Bücher und 500 Aufsätze. Im Zusammenhang mit dem
Dreikörperproblem schuf er das Konzept nicht–integrabler dynamischer Systeme und
beeinflusst damit die Suche nach einer Lösung der Frage nach der Stabilität des Sonnensystems sehr.
Die Himmelskörpermechanik lebte mit den ersten künstlichen Satelliten stark auf.
In dieser Zeit gab und gibt es viele, die Beachtliches geleistet haben. Einzelheiten können in [11] nachgelesen werden.
1.2 Physik
1.2.1
Ort – Geschwindigkeit – Beschleunigung
Ort, Geschwindigkeit und Beschleunigung sind in dieser Arbeit wesentliche Eigenschaften der zu untersuchenden Körper. Diese drei Größen sind miteinander verbun-
1.2. PHYSIK
5
den. Für die Durchschnittsgeschwindigkeit gilt z.B.
v̄ =
zurückgelegte Strecke
∆x
=
benötigte Zeit
∆t
Soll nicht die Durchschnittsgeschwindigkeit, sondern die momentane Geschwindigkeit
ermittelt werden, so muss man die zurückgelegte Strecke in immer kleineren Zeitintervallen messen. In der Mathematik wird dann der Grenzwert
v = lim
∆t→0
dx
∆x
=
= ẋ
∆t
dt
gebildet, wobei die Ableitung nach der Zeit durch einen Punkt gekennzeichnet wird
(dx/dt = ẋ). Die Geschwindigkeit, die Änderung des Ortes mit der Zeit, entspricht
also der ersten Ableitung des Ortes nach der Zeit. Mit der Beschleunigung wird ähnlich
verfahren. Es gilt dann
∆v
a = lim
= v̇ = ẍ.
∆t→0 ∆t
Diese Beziehung von Ort, Geschwindigkeit und Beschleunigung wird benutzt, um aus
einer Bewegungsgleichung eine Differentialgleichung zu erstellen, deren Lösung numerisch berechnet werden kann.
1.2.2
Die Keplerschen Gesetze
Nach [12] untersuchte gegen Ende des 16. Jahrhunderts der Astronom Tycho Brahe die
Planetenbewegung und machte Beobachtungen, die wesentlich genauer waren als die
bis dahin bekannten. Johannes Kepler fand unter Verwendung dieser Daten nach vielem Probieren heraus, dass die Planeten die Sonne nicht auf Kreisbahnen, sondern auf
Ellipsenbahnen umlaufen. Er zeigte auch, dass sich die Planeten nicht mit konstanter
Abbildung 1.1: Ellipse mit Brennpunkten und Halbachse a
Geschwindigkeit bewegen, sondern dass die Geschwindigkeit um so größer ist, je näher
sich ein Planet bei der Sonne befindet (siehe Abb. 1.1). Schließlich entwickelte Kepler
eine mathematische Beziehung zwischen der Umlaufdauer eines Planeten und seiner
durchschnittlichen Distanz zur Sonne. Kepler drückte seine Ergebnisse in Form dreier
KAPITEL 1. EINLEITUNG
6
empirischer Gesetze für die Planetenbewegung aus. Einige Jahrzehnte später lieferten
diese Gesetze die Basis zu Newtons Entdeckung des Gravitationsgesetz.
1. Alle Planeten bewegen sich auf elliptischen Bahnen um die Sonne, wobei die
Sonne in einem der Brennpunkte der Ellipse steht (siehe Abb. 1.1).
2. Die Verbindungslinie zwischen der Sonne und einem Planeten überstreicht in
gleicher Zeit gleiche Flächen.
3. Die Quadrate der Umlaufzeiten zweier Planeten T1 und T2 verhalten sich wie
die dritten Potenzen der großen Halbachsen aq und a2 ihrer Bahnen:
T12 : T22 = a31 : a32
1.2.3
T2
= konst.
a3
Die Newtonschen Axiome
Eine der großen Leistungen Newtons war die Aufstellung der Newtonschen Axiome.
Aus der Beobachtung der Natur gelang es ihm, drei grundsätzliche Prinzipien herauszufiltern, auf welche die gesamte Mechanik aufgebaut werden kann. Diese Axiome
sind grundlegend und können in jedem Buch über Mechanik nachgelesen werden [17].
1.) Trägheitsprinzip Ein kräftefreier Körper bewegt sich gradlinig gleichförmig.
2.) Aktionsprinzip Wenn eine Kraft F~ auf einem Körper mit der Masse m wirkt,
beschleunigt sie ihn mit
~
¨= F.
(1.1)
~a = ~x
m
(Das Trägheitsprinzip ist der Spezialfall F~ = 0 des Aktionsprinzips.)
3.) Reaktionsprinzip Wenn die Kraft F~ , die auf einen Körper wirkt, ihren Ursprung
in einem anderen Körper hat, so wirkt auf diesen die entgegengesetzte gleiche Kraft
−F~ .
(Dieses Prinzip ist auch bekannt als Aktio = Reaktio.)
Newton hatte das Aktionsprinzip eigentlich anders formuliert:
2.)0 Wenn eine Kraft F~ auf einen Körper wirkt, ändert sich sein Impuls p~ = m~v so,
dass
d
m~v = F~
(1.2)
dt
gilt.
Diese Fassung behält ihre Richtigkeit im Gegensatz zu 2.) auch bei einer veränderlichen Masse, wie das bei einer Rakete oder aber auch in der Relativitätstheorie der Fall
ist. In den folgenden Kapiteln wird (1.1) oft benutzt, um Bewegungsgleichungen aufzustellen. Diese Bewegungsgleichungen sind die Grundlage für die Berechnung von
Planetenbahnen. Die Newtonschen Axiome wurden durch die spezielle Relativitätstheorie abgelöst. Für den Normalfall und auch für das Dreikörperproblem werden sie
jedoch weiterhin verwendet. Der Fehler bei Geschwindigkeiten, die klein gegenüber
der Lichtgeschwindigkeit (c = 299792458 m
s ) sind, ist in der Regel zu vernachlässigen.
1.2. PHYSIK
1.2.4
7
Gravitationskraft
Eine der großen Leistungen Newtons war die Aufstellung des Gesetzes der Schwerkraft. Die Keplerschen Gesetze waren zwar ein wichtiger Schritt zum Verständnis der
Planetenbewegung. Es handelte sich bei ihnen aber nur um empirisch aufgestellte Regeln. Erst Newton tat den riesigen Schritt nach vorne und schrieb die Beschleunigung
eines Planeten auf seiner Bahn einer Kraft zu, die zwischen der Sonne und dem Planeten wirkt und umgekehrt proportional ist zum Quadrat des Abstandes von der Sonne.
Und er konnte beweisen, dass diese Kraft genau die von Kepler beobachteten elliptischen Bahnen zur Folge hat.
Nach dem Newtonschen Gravitationsgesetz übt jeder Körper eine anziehende Kraft auf
jeden anderen Körper aus. Es gilt
Gm1 m2 ~r12
.
F~12 = −
2
r12
r12
(1.3)
Dabei ist ~r12 der Vektor der von Masse 1 zu Masse 2 zeigt, und r12 dessen Betrag, also
der Abstand der Massen 1 und 2. G ist die (universelle) Gravitationskonstante mit dem
Wert
G = 6.67 · 10−11 N m/kg 2 .
Newton schrieb bereits um 1669, dass „das Streben, sich von der Sonne zu entfernen,
reziprok zum Quadrat des Abstandes von der Sonne ist“. Sein Gesetz wurde 1686 veröffentlicht. Danach dauerte es allerdings noch etwa ein Jahrhundert, bis Cavendish die
Konstante G experimentell relativ genau messen konnte.
1.2.5
Die Gravitationskonstante
Die Kenntnis der Gravitationskonstanten G ist nicht nur von grundsätzlichem Interesse, sondern hat auch praktische Anwendungen, zum Beispiel bei der Bestimmung der
Dichteverteilung im Inneren der Erde, des Mondes, anderer Planeten und entfernter
Sterne. 1798 konnte Cavendish mit einer Gravitationswaage [12, S.310] den Wert bereits auf 1% genau bestimmen. Alle Messungen von G sind wegen der extrem kleinen
Gravitationskraft sehr kompliziert. So erklärt sich, dass man G auch heute nur mit einer Genauigkeit von bis zur vierten Stelle nach dem Komma kennt. Obwohl G eine der
ersten universellen physikalischen Konstanten war, die jemals gemessen wurde, bleibt
sie eine der am wenigsten exakt bestimmten Größen.
Für die praktische Anwendung der hier beschriebenen Verfahren hat das deutliche Auswirkungen. Viele der hier berechneten Bahnen werden mit einer Genauigkeit erstellt,
die weit über die von G hinaus geht. Ein Ergebnis kann jedoch nicht genauer sein als
die zu Grunde liegenden Werte. Außerdem werden alle Himmelskörper als homogene
Massen bzw. als Punktmassen angesehen. In der Praxis sind Planeten jedoch inhomogen. Es gibt Berge, die Dichte im Erdinnern ist anders als an der Oberfläche, ja sogar
große Erzvorkommen können die Erdanziehungskraft variieren und stören. In späteren
Kapiteln wird z.B. die Landung einer Kanonenkugel bis auf Bruchteile von Sekunden
genau vorhergesagt. Solche Werte sind also mit Vorsicht zu genießen. Es gehört noch
viel mehr dazu, die Bahn einer Sonde auf lange Sicht vorauszuberechnen, als in dieser
Arbeit erwähnt wird.
KAPITEL 1. EINLEITUNG
8
1.2.6
Die Stabilität des Sonnensystems
In den späteren Kapiteln wird deutlich gezeigt, dass manchmal winzige Veränderungen der Planetenbahnen und –geschwindigkeiten zu großen Änderungen der weiteren
Bahn führen können. Mit der Erfahrung, dass unser Sonnensystem auf Dauer stabil ist,
beschäftigte sich z.B. Laplace. Dieses Problem ist bis heute nicht gelöst. Die Titus–
Bodesche Beziehung[4] beschreibt jedoch eine Regelmäßigkeit in der Anordnung der
Planeten.
Die Radien an der Planetenbahnen bilden näherungsweise eine geometrische Reihe:
an ≈ aErde k n ,
k ≈ 1.85
(nMerkur = −2, nVenus = −1, nErde = 0, nMars = 1, nJupiter = 3, nSaturn = 4, . . .)
Der fehlende Wert n = 2 entspricht dabei dem Asteroidengürtel zwischen Mars und
Jupiter. Es wird vermutet, dass Planeten, die diese Bedingung nicht erfüllen, sich stören
würden und das System auf Dauer nicht stabil wäre.
Diese Beziehung lässt sich leider nicht an anderen Sonnensystemen verifizieren. Selbst
in unserem Sonnensystem ist es unklar, ob nicht noch weitere Planeten existieren. Das
von einem evtl. weiteren vorhandenen Planeten reflektierte Sonnenlicht wäre zu gering,
um messbar zu sein. Man untersucht deshalb die bekannten Planeten auf Bahnabweichungen, die auf einen weiteren Planeten hinweisen würden. Auf diese Weise wurde
auch der Pluto entdeckt. Seine Position wurde theoretisch vorhergesagt, bevor er ausgemacht werden konnte.
1.3 Mathematik
1.3.1
Die Gravitationskonstante
Aus Gründen der Einfachheit wird das Gravitationsgesetz im Folgenden nicht mehr wie
in (1.3) geschrieben. Statt dessen wird eine Form ohne Gravitationskonstante benutzt.
m1 m2 ~r12
F~12 = − 2
r12 r12
Die Gravitationskonstante verschwindet dabei nicht etwa. Vielmehr werden die Einheiten so gewählt, dass die Gravitationskonstante den Wert 1 annimmt.
Beispiel 1.1
Die Strecke soll in Lichtsekunden (1Ls = 299, 792, 458m) und die Masse in Erdmassen (1mErde = 5.977 · 1024 kg ) gemessen werden. Wie muss nun die Einheit der Zeit
gewählt werden, damit die Gravitationskonstante zu 1 wird?
Für die Gravitationskonstante gilt wegen N/kg = m/s2
6.67 · 10−11
3
N m2
−11 m
=
6.67
·
10
.
kg 2
s2 kg
1.3. MATHEMATIK
9
Mit den neuen Maßeinheiten soll sich Folgendes ergeben.
6.67 · 10−11
Dann muss gelten
m3
6.67 · (299792458m)3 · 5.977 · 1024 · X 2
= 11
2
s kg
10 · 2997924583 · 5.977 · 1024 kg · (Xs)2
(Ls)3
6.67 · 5.977 · 1024 X 2
=
11
3
10 · 299792458 (Xs)2 · mErde
(Ls)3
=1
(Xs)2 · mErde
6.67 · 5.977 · 1024 X 2
1011 · 2997924583
2
⇔ X = 6.758542032 · 1011
⇒ X = 259971.96
!
1=
Die Zeit wird also in 259972s gemessen, das sind etwas mehr als 3 Tage. Diese Einheiten können an das jeweilige Problem angepasst werden.
1.3.2
Differentialgleichungen
Dieser Abschnitt soll kurz die benötigten Aspekte von Differentialgleichungen erläutern. Er orientiert sich deshalb eher an den Bedürfnissen der Physik als an denen der
Mathematik.
Unter einer Differentialgleichung versteht man eine Gleichung, in der sowohl eine
Funktion als auch Ableitungen dieser Funktion vorkommen. In dieser Arbeit werden
nur Differentialgleichungen der Form
(1.4)
y (n) = f t, y, y 0 , . . . , y (n−1)
betrachtet, also Differentialgleichungen, die sich nach der höchsten Ableitung auflösen
lassen (explizite Differentialgleichungen). Die höchste Ableitung gibt die Ordnung an.
So ist (1.6) eine Differentialgleichung der Ordnung n.
Analytische Lösung
Differentialgleichungen können nur in Spezialfälle analytisch gelöst werden. Ein Verfahren mit charakteristischen Polynomen, das oft in der Physik Anwendung findet,
erbringt manchmal diese Lösung [17, S.150].
Beispiel 1.2
Eine gedämpfte harmonische Schwingung kann mit der Differentialgleichung
ẍ = −
D
k
ẋ − x
m
m
⇔ mẍ + Dẋ + kx = 0
beschrieben werden. D und k stehen dabei für die Dämpfungs– und Federkonstante.
Mit dem Ansatz x = x0 eλt ergibt sich dann das charakteristische Polynom
mx0 λ2 eλx + Dx0 λeλx + kx0 eλx = 0
mλ2 + Dλ + k = 0
mit den Nullstellen λ1,2 =
√
−D± D 2 −4mk
.
2m
(1.5)
Die Lösungen sind x1,2 (t) = x0 eλ1,2 t .
KAPITEL 1. EINLEITUNG
10
Anfangswertproblem
Soll die Bahn eines gedämpften Pendels nun konkret bestimmt werden, müssen zuvor
Anfangswerte (oder auch Startwerte) festgelegt werden. Man benötigt eine Startzeit t 0 ,
einen Startort x0 = x(t0 ) und eine Startgeschwindigkeit v0 = v(t0 ). Mit k = 14,
m = 2 und D = 1 ergeben die Startwerte t0 = 0, x0 = 5 und v0 = 5 die in Abbildung
1.1 gezeigte Bewegung.
5
x(t)
4
3
2
1
0
−1
−2
−3
−4
0
0.5
1
1.5
2
2.5
3
Abbildung 1.2: Harmonischer Oszillator 0<t<3
Reduzierung der Ordnung
Jede Differentialgleichung der Ordnung n lässt sich in ein Differentialgleichungssystem mit n Gleichungen der Ordnung 1 zerlegen. Das hat den Vorteil, nur Differentialgleichungen der Ordnung 1 untersuchen zu müssen.
Beispiel 1.3
Gegeben sei eine Differentialgleichung
y (2) = y 00 = f (t, y, y 0 ) = −ky
(1.6)
Nun benötigt man n (hier n = 2) neue Variablen v und x mit x = y und v = y 0 . Dann
ergeben sich die n Differentialgleichung 1. Ordnung als
x0 = y 0 = v
v 0 = y 00 = f (t, x, v) = −kx
1.3. MATHEMATIK
1.3.3
11
Numerik
Seitdem genügend Rechenleistung in Form von Computern zur Verfügung steht, können viele Probleme gelöst und analysiert werden, die früher einen zu großen Aufwand
dargestellt hätten. So z.B. das 4–Farben–Problem, aber auch das Dreikörperproblem.
Ein Spezialfall des Dreikörperproblems, der in Abschnitt 7.2 beschrieben wird, wurde
1912 noch in penibler Handarbeit berechnet [2]. Die Vorteile eines Computers bringen
aber auch Nachteile mit sich.
Rundungsfehler
Wie in [6] beschrieben wird, werden in einem Rechner Zahlen als Gleitpunktzahlen
dargestellt. Eine solche Zahl besteht aus drei Teilen.
1.) Dem Vorzeichen.
2.) Den Stellen der Zahl.
3.) Dem Exponenten der Zahl.
Das Hauptproblem liegt darin, dass die Anzahl der Stellen für jede Zahl feststeht. So
kann z.B. in Excel eine Variable a in einfacher Genauigkeit deklarieren und ihr einen
beliebigen Wert zuweisen.
Dim a As Single
a = 0.0000123456789
Ein Ausgabe von a ergibt
a=0.1234568E-04
Der Rechner speichert don der Eingabe also nur 7 Stellen von a und rundet mit der
achten Stelle. Bei Rechnungen tritt dieser Rundungsfehler an vielen Stellen auf.
Beispiel 1.4
Die Aufgabe 1.2345675013 + 0.002358711 − 1.236925987 = 0.000000225 soll nachgerechnet werden. Ein Computer geht dabei Schritt für Schritt vor.
1. Die Zahlen werden gerundet.
gl(1.2345675013) = +1.234568E + 0
gl(0.002358711) = +2.358712E − 3
gl(1.236925987) = +1.236926E + 0
2. Die ersten zwei Zahlen werden addiert und das Ergebnis wird gerundet.
(+1.234568E + 0) + (+2.3587118E − 3) = (+1.236927E + 0)
3. Die Subtraktion wird durchgeführt und das Ergebnis wird gerundet.
(+1.236927E + 0) − (+1.236926E + 0) = (+1.E − 7)
Nun stellt sich heraus, dass das exakte Ergebnis 2.25 · 10−7 mehr als doppelt so
groß ist wie das Computerergebnis 1 · 10−7 .
Der im Beispiel erläuterte Effekt wird Auslöschung genannt, und tritt besonders bei der
Subtraktion großer nur leicht unterschiedlicher Zahlen auf. Das ist beim Dreikörperproblem z.B. bei sehr kleinen Schrittweiten der Fall. Das Problem wird in Abschnitt
5.2 näher erläutert.
KAPITEL 1. EINLEITUNG
12
Fehler
Soll die Genauigkeit einer Näherungslösung quantitativ erfasst werden, so kann deren
absoluter und den relativer Fehler angeben werden. Mit einem exakten Wert x und
einer Näherung x̃ ergibt sich der absolute Fehler als
∆x = x̃ − x
und für x 6= 0 der relative Fehler als
ε=
x̃ − x
∆x
=
|x|
|x|
In Beispiel 1.4 ist das exakte Ergebnis x = 2.25 · 10−7 und die Näherung x̃ = 1 · 10−7 .
Dann ist der absolute Fehler ∆x = 1.25 · 10−7 und der relative Fehler ε = 1.25 oder
auch 125%.
Da in der Numerik das exakte Ergebnis oft nicht bekannt ist, muss der Fehler abgeschätzt werden. Dazu kann eine weitere Näherung x̃2 dienen, von der bekannt ist, dass
sie exakter ist als eine erste Näherung x̃2 . Der relative Fehler lässt sich dann als
ε≈
x̃1 − x̃2
|x̃2 |
approximieren. In dieser Arbeit werden beide Verfahren angewendet. Eine genauere
Beschreibung zur Fehleranalyse findet ist unter [6] zu finden.
Kapitel 2
Numerische Integration
In diesem Abschnitt werden einfache und etwas fortgeschrittene Verfahren zur numerischen Integration erläutert. Es erhebt nicht den Anspruch auf Vollständigkeit und meisterhafte Ergebnisse. Vielmehr sollen einige grundlegenden Bezeichnungen und Prinzipien eingeführt und erläutert werden.
2.1 Ein erstes Verfahren — Riemann–Summen
Die Definition eines Riemann-Integrals [5, S.450] legt bereits ein erstes Verfahren zur
Berechnung von Integralen nahe. Berechnet werden soll der Wert
Z b
f (x) dx.
(2.1)
a
Dazu wird das Intervall [a, b] in n gleich lange Unterintervalle der Länge b−a
n und mit
den Grenzen [ai , bi ], i = 1, 2, . . . , n. Der Integralwert wird also in n Schritten berechnet. Die Länge eines Schrittes bezeichnet man als Schrittweite. Für jedes Intervall werden noch Werte xi ∈ [ai , bi ] benötigt. Die Gesamtheit dieser Werte ~x = (x1 , . . . , xn )
bezeichnet man als Zwischenvektor. Dann konvergiert nach der Definition die Folge
der Riemann–Summen gegen den gesuchten Integralwert.
Z b
n
b−aX
f (xi ) →
f (x) dx für n → ∞
(2.2)
Sn =
n i=1
a
Ausgangspunkt für das folgende Beispiel ist eine Funktion, deren Stammfunktion bekannt ist. Es wäre also keine numerische Integration notwendig. Andererseits lässt sich
so der Fehler leicht berechnen. In Beispiel 2.4 wird beschrieben, wie man auch ohne
Kenntnis einer exakten Lösung die Qualität der numerischen Lösung beurteilen kann.
Beispiel 2.1
Berechne den Wert des Integrals
Z
2.5
0.1
1
dx.
x
Die Stammfunktion zu f (x) = ist bekanntlich F (x) = log(x). Analog zur Definition werden nun die Zerlegungsnullfolge und die dazugehörenden Zwischenvektoren
1
x
13
KAPITEL 2. NUMERISCHE INTEGRATION
14
gewählt.
Das Intervall [0.1, 2.5] wird in gleich lange Unterintervalle zerteilt. Es gilt
|[ai , bi ]| = b−a
n .
Der Zwischenvektor besteht in seinen Komponenten aus den gegebenen Grenzen der
einzelnen Unterintervalle. „Anfangspunkt“ bedeutet in diesem Zusammenhang, dass
der Zwischenpunkt gleich der linken Grenze des Unterintervalls ist (xi = ai , i =
1, . . . , n). „Endpunkt“ bedeutet entsprechend, dass der Zwischenpunkt gleich der rechten Grenze ist.
Der Integralwert lässt sich jetzt über (2.2) berechnen. In Tabelle 2.1 sind 16 Ergebnisse solcher Riemann–Summen zusammengefasst. Jeweils 8 für die End– und 8 für die
Anfangspunkte.
Schrittweite
2.4000
1.2000
0.6000
0.3000
0.1500
0.0750
0.0375
0.0187
mit Anfangspunkten
24.0000
12.9231
7.6345
5.1911
4.1013
3.6235
3.4104
3.3118
rel. Fehler
6.4560
3.0148
1.3718
0.6127
0.2742
0.1257
0.0595
0.0289
mit
Endpunkten
0.9600
1.4031
1.8745
2.3111
2.6613
2.9035
3.0504
3.1318
rel. Fehler
0.7018
0.5641
0.4177
0.2820
0.1732
0.0980
0.0523
0.0271
log(25)
3.2189
3.2189
3.2189
3.2189
3.2189
3.2189
3.2189
3.2189
Tabelle 2.1: Ergebnisse der Integration mit Riemann–Summen
Wie in Tabelle 2.1 zu sehen ist, unterscheiden sich die Ergebnisse mit den verschiedenen Zwischenvektoren, trotz identischer Zerlegungsfolge, sehr. Gleichzeitig wird aber
auch deutlich, dass sowohl die Folge mit den Anfangspunkten als auch die Folge mit
den Endpunkte gegen den gleichen und auch korrekten Grenzwert konvergieren. Das
ist auch klar, da unsere Funktion f (x) = 1/x auf dem Intervall (0, ∞) Riemann–
integrierbar ist und somit jede Riemann–Folge gegen den gleichen Grenzwert konvergiert.
2.1.1
Die Abhängigkeit vom Zwischenvektor
Offenbar hängt das Ergebnis, der Integralwert, stark vom Zwischenvektor ~x ab. Die
Frage muss also lauten: Wie lässt sich mit der Wahl des Zwischenvektors das Ergebnis
optimieren. Wie kann man in kürzerer Zeit ein besseres Ergebnis erreichen?
Im Fall der Funktion aus Beispiel 2.1 sieht man, dass bei dem Zwischenvektor bestehend aus den jeweiligen Anfangswerten der Unterintervalle das Resultat immer zu hoch
ist und bei dem zweiten Zwischenvektor immer zu niedrig. Die Funktion f (x) = 1/x
ist streng monoton fallend. Deshalb ist auf dem Intervall I = [ai , bi ] ⊂ [a, b] immer
f (ai ) = maxf (x) und f (bi ) = minf (x). Der Integralwert jedes einzelnen Unterinx∈I
x∈I
tervalls wird also angenähert durch einen maximalen und minimalen Wert. Für das
Intervall I heißt das
Z
1
dx ≤ maxf (x).
minf (x) |I| ≤
x∈I
x∈I
x
Allgemein kann ein Ergebnis aus der Analysis für dieses Problem herangezogen werden.
2.1. EIN ERSTES VERFAHREN — RIEMANN–SUMMEN
15
Theorem 1 (Erweiterter Mittelwertsatz der Integralrechnung)
Die Funktion f sei stetig und die Funktion g sei Riemann–integrierbar auf dem Intervall I = [xi , xi+1 ] und es sei g ≥ 0 oder g ≤ 0. Dann gibt es einen Wert ξ ∈ I mit
inf f ≤ f (ξ) ≤ sup f für den gilt
Z
Z
(2.3)
f g dx = f (ξ) g dx.
I
I
In Beispiel 2.4 wird die Funktion f (x) durch eine konstante Funktion g(x) = c angenähert. Gleichung 2.3 wird dann zu
Z
Z
c · f dx = f (ξ) c dx
I
ZI
f (x) dx = f (ξ)(b − a)
I
ξ ist also ein Zwischenstelle, eine Komponente des Zwischenvektors mit ξ ∈ [x i−1 , xi ].
Bislang haben wir ξ also sehr ungünstig gewählt. Im folgenden Beispiel wird der Zwischenvektor optimiert.
Beispiel 2.2 (Trapez– und Mittelpunktsregel)
Rx
Wie zuvor erläutert gibt es für das Intervall I einen Wert ξ ∈ I , so dass f (ξ) · (xi − xi−1 ) = xii−1 f (x) dx.
Da der Wert ξ unbekannt ist, ist es nicht das Ziel, ξ exakt zu bestimmen. Vielmehr ist
das Wissen über die Existenz dieses Wertes die Motivation, die bisherigen Ergebnisse
zu verbessern.
Eine erste Verbesserung besteht in einem Mittelwert zwischen dem Maximalwert und
dem Minimalwert. Für das Unterintervall I = [xi−1 , xi ] gilt dann
minf (x) = f (xi−1 ) ≤
x∈I
f (xi−1 ) + f (xi )
≤ f (xi ) = maxf (x)
x∈I
2
Der exakte Zwischenwert ist nun unbekannt. Wird die Fläche im Intervall nun mit
(xi − xi−1 ) f (xi−12)+f (xi ) approximiert, so entspricht dies einer Näherung durch eine
Funktion 1. Grades. Wie in Abbildung 2.1 zu sehen ist, werden die Punkte des Graphen zum Anfang und zum Ende der Unterintervalle durch eine Gerade miteinander
verbunden. Die einzelnen Flächen ergeben Trapeze, so dass dieses Verfahren auch als
Trapezregel bezeichnet wird. Da die untersuchte Funktion nicht nur streng monoton
fallend sondern auch konkav ist, ist dieser Wert weiterhin immer größer als der Integralwert.
Im Gegensatz dazu ergibt die Mittelpunktsregel bei einer konkaven Funktion immer
einen Wert, der kleiner ist als der Integralwert. Bei der Mittelpunktsregel sind die Zwischenwerte immer genau in der Mitte der einzelnen Unterintervalle. Somit schließt jede
Gerade durch diesen Punkt die gleiche Fläche mit der x–Achse und den rechten und
linken Grenzen ein. Die Gerade kann also so gedreht werden, dass sie eine Tangente
an f (x) darstellt. Wie in Abbildung 2.2 zu sehen ist, ist diese Gerade immer unterhalb von f . In Tabelle 2.2 werden die Ergebnisse einer Integration über der Funktion
f (x) = 1/x auf dem Intervall [0.1, 2.5] dargestellt. Dabei ist Mittelwert = T rapezregel+M2ittelpunktsregel .
Abbildung 2.1 zeigt nochmal die Zerlegung des Intervalls und die Näherung durch
Trapez– und Mittelpunktsregel.
Der Fehler des Ergebnisses aus dem Mittelwert zwischen der oberen und der unteren Gerade ist zu Anfang höher als der Wert der unteren Gerade und wird mit kleineren
KAPITEL 2. NUMERISCHE INTEGRATION
16
12
Exakt
drueber
drunter
10
8
6
4
2
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Abbildung 2.1: Mittelpunkts– und Trapezregel
5
f (x) = 1/x
y = 1.25
y = 1.5625x + 2.5
Drehpunkt
4.5
4
u
3.5
3
2.5
2
1.5
u
1
0.5
0
0.2
0.4
0.6
0.8
1
Abbildung 2.2: Erläuterung der Mittelpunktsregel
1.2
1.4
2.2. FEHLERABSCHÄTZUNG
Schrittweite
2.40000
1.20000
0.60000
0.30000
0.15000
0.07500
0.03750
0.01875
Trapezregel
12.48000
7.16308
4.75447
3.75110
3.38135
3.26352
3.23042
3.22179
17
Mittelpunktsregel
1.84615
2.34586
2.74773
3.01159
3.14569
3.19732
3.21316
3.21742
Fehler
2.87713
1.22533
0.47706
0.16534
0.05047
0.01387
0.00359
0.00091
Fehler
0.42646
0.27122
0.14637
0.06440
0.02274
0.00670
0.00178
0.00045
Mittelwert
7.16308
4.75447
3.75110
3.38135
3.26352
3.23042
3.22179
3.21961
Fehler
1.22533
0.47706
0.16534
0.05047
0.01387
0.00359
0.00091
0.00023
Tabelle 2.2: Ergebnisse Trapezregel
Schrittweiten besser. Das liegt daran, dass die Gerade der Trapezregel für große Schrittweiten sehr schlechte Ergebnisse liefert. Aber auch für sehr kleine Schrittweiten ist der
Fehler des Mittelwerts nur etwa halb so groß wie die Fehler der anderen beiden Werte.
Diese Verbesserung lohnt den Aufwand nicht. Besser ist es, auf diesen Wert zu verzichten und mit dem frei werdenden Rechenaufwand den Integralwert mit einer kleineren
Schrittweite zu berechnen.
2.2 Fehlerabschätzung
Unterteilt man das Intervall [a, b] in gleich lange Unterintervalle der Länge h, so gilt
bei der Mittelpunktsregel für die n–te Riemann–Summe (siehe (2.2)
Sn = h
n
X
(2.4)
f (xi ),
i=1
i
mit xi = ai +b
2 . Der Fehler ist dann die Differenz zwischen dem exakten und dem
genäherten Wert
Z b
n
X
f (x) dx − h
f (xi ).
(2.5)
∆Sn =
a
i=1
Die Funktion f (x) lässt sich in der Umgebung von xi durch eine Taylor–Entwicklung
annähern.
1
(2.6)
f (x) = f (xi ) + δf 0 (xi ) + δ 2 f 00 (xi ) + . . .
2
Setzt man (2.6) in das Integral in (2.5) ein und integriert, jeweils für ein Intervall, von
−h/2 bis +h/2 über δ, so sieht man, dass der erste Summand der Taylorreihe mit der
Summe in (2.4) identisch ist. Der zweite Summand verschwindet bei der Integration
der zur y–Achse symmetrischen Funktion. In diesem Fall sind das alle δ mit ungerader
Potenz. Für den Fehler gilt dann
1
∆Sn = f 00 (xi )
2
Z
h
2
−h
2
δ 2 dδ =
h2 00
f (xi ).
24
(2.7)
Man spricht in diesem Fall davon, dass der Fehler von der Ordnung 2 in h ist. Die
Trapezregel ist ebenfalls ein Verfahren 2. Ordnung.
exakt
3.21888
3.21888
3.21888
3.21888
3.21888
3.21888
3.21888
3.21888
KAPITEL 2. NUMERISCHE INTEGRATION
18
2.3 Verfahren höherer Ordnung
Eine Näherung der zu integrierenden Funktion durch eine Funktion 1. Grades wie bei
der Trapez– und Mittelpunktsregel führte zu einem Verfahren 2. Ordnung. Somit liegt
es nahe, Funktion höheren Grades zur Näherung zu verwenden. Benutzt man eine quadratischen Funktion, so führt das zu der Simpson–Regel. Das Simpson–Verfahren ist
ein Verfahren 4. Ordnung.
Nun sollen Funktionen auf dem Intervall [a, b] durch ein Polynom vom Grad L
approximiert werden. Es gelte
f (xk ) =
L
X
αi Pi (xk ),
(2.8)
i=0
an L + 1 Stützstellen xk , k = 0, .., L. Die Pi (x), i = 0, . . . , L bilden einen Satz linear
unabhängiger Polynome der maximalen Ordnung i. Ist die zu integrierende Funktionf (x)
selbst von der Ordnung L, so ist die Näherung gleich dem Integralwert I.
Für den Fall L = 3 gilt dann
I = ω0 f (x0 ) + ω1 f (x1 ) + ω2 f (x2 ).
(2.9)
Die Integration sei nun für die Funktionen 1, x, und x2 exakt.
Z xi
!
1 dx = xi − xi−1 = ω0 + ω1 + ω2
xi−1
xi
!
xi + xi−1
1 2
xi − x2i−1 = ω0 xi−1 + ω1
+ ω 2 xi
2
2
xi−1
Z xi
! 1
1 3
x2 dx =
xi − x3i−1 =
(xi + xi−1 )(x2i − x2i−1 ) + (xi − xi−1 )(x2i + x2i−1 )
3
6
xi−1
Z
x dx =
= ω0 x2i−1 + ω1
xi + xi−1 2
+ ω2 x2i
2
(2.10)
Das Lösen des Gleichungssystems ergibt
1
(xi − xi−1 )
6
4
ω1 = (xi − xi−1 )
6
ω0 = ω 2 =
und somit die Simpson–Formel
Z xi
1
xi + xi−1
= (xi − xi−1 ) f (xi ) + 4f
+ f (xi−1 ) .
6
2
xi−1
(2.11)
(2.12)
2.4 Integration mit den Gauß–Formeln
Bislang wurden nur die Anzahl der Stützstellen, und somit der Grad des interpolierenden Polynoms, gewählt und daraus die Gewichte ωi berechnet. Als Stützstellen wurden
ohne Begründung die Intervallgrenzen und die Intervallmitte genommen. Beim Gauß–
Verfahren werden nun auch die Stützstellen xi frei wählbar gelassen. Man geht dann
folgendermaßen vor:
2.4. INTEGRATION MIT DEN GAUSS–FORMELN
19
b−a
1. Man forme ein Integral über x0 durch Substitution x0 = b+a
2 + 2 y auf ein im
Intervall [-1,1] definiertes, bestimmtes Integral um. Das Integral ist dann
Z b
Z
Z 1
b−a 1
b+a b−a
0
0
f (x ) dx =
f
f (x)dx.
Iab =
+
y dy =
2
2
2
a
−1
−1
(2.13)
Es reicht also aus, die Betrachtungen im Folgenden auf Integrale über dem Intervall [−1, 1] zu beschränken.
2. Sei L die Anzahl der Stützstellen. Dann ist
I−1,1 = ω0 f (x0 ) + ω1 f (x1 ) + . . . + ωL−1 f (xL−1 ),
(2.14)
wobei sowohl die Stützstellen x0 , . . . , xL−1 als auch die Gewichte ω0 , . . . , ωL−1
unbekannt sind.
3. Zur Bestimmung dieser 2L Unbekannten werden in (2.14) 2L Polynome eingesetzt (siehe (2.8)).
Dazu ein Beispiel.
Beispiel 2.3
Betrachtet wird der zur Simpson–Formel passende Fall L = 2. In (2.14) werden dann
die Polynome 1, x, x2 und x3 eingesetzt. Mit a = −1 und b = 1 gilt dann
(b − a) = 2 = ωo + ω1
1 2
(b − a2 ) = 0 = ω0 x0 + ω1 x1
2
1 3
2
(b − a3 ) = = ω0 x20 + ω1 x21
3
3
1 4
(b − a4 ) = 0 = ω0 x30 + ω1 x31
4
(2.15)
(2.16)
(2.17)
(2.18)
Einsetzen von (2.16) in (2.18) liefert x20 = x21 und damit x0 = −x1 , wenn man fordert,
dass die Stützstellen verschieden sein sollen. Mit (2.15), (2.16) und (2.17) ergibt sich
ω0 = ω 1 = 1
und x20 =
1
1
⇒ x1,2 = ± √ .
3
3
(2.19)
Die x1,2 sind die gesuchten Stützstellen.
Möchte man dieses Verfahren mit einem höheren L durchführen, so bekommt man
beim Auflösen des nichtlinearen Gleichungssystem Probleme. Dieses Problem kann
man mit Polynomen gelöst werden, die, wie die Legendre–Polynome, auf dem Intervall
[−1, 1] orthogonal zueinander sind. Eine Herleitung des Verfahrens und einer Fehlerabschätzung kann man in [6, S.156] nachlesen.
In Tabelle 2.3 werden Ergebnisse von Trapez– und Simpson–Verfahren miteinander
verglichen. Mit beiden Verfahren sollte die Funktion f (x) = x1 sollte über dem Intervall [0.1, 2.5] integriert werden. Die Anzahl der Schritte wurde dabei von Zeile zu Zeile
verdoppelt bzw. die Schrittweite halbiert. In Bezug auf die Ordnung des Verfahrens ist
dabei auch besonders das Verhältnis des relativen Fehlers zwischen zwei Zeilen interessant. Die Trapezregel ist ein Verfahren 2. Ordnung. Bei halber Schrittweite sollte
dieses Verhältnis 1/22 = 1/4 betragen. Beim Simpson–Verfahren entsprechend 1/16.
KAPITEL 2. NUMERISCHE INTEGRATION
20
Schritte
2
4
8
16
32
64
128
256
512
1024
Ergebnis
7.163077
4.754471
3.751099
3.381345
3.263517
3.230421
3.221791
3.219606
3.219059
3.218922
Trapezregel
Fehler
Verhältnis
1.23E+00
4.77E-01
2.5685
1.65E-01
2.8852
5.05E-02
3.2758
1.39E-02
3.6395
3.59E-03
3.8667
9.06E-04
3.9607
2.27E-04
3.9896
5.68E-05
3.9974
1.42E-05
3.9993
Ergebnis
3.951602
3.416642
3.258094
3.224240
3.219389
3.218914
3.218878
3.218876
3.218876
3.218876
Simpson
Fehler
2.28E-01
6.14E-02
1.22E-02
1.67E-03
1.59E-04
1.19E-05
7.84E-07
4.97E-08
3.12E-09
1.95E-10
Verhältnis
3.7050
5.0427
7.3104
10.4587
13.4338
15.1338
15.7590
15.9379
15.9846
Tabelle 2.3: Vergleich Trapez– und Simpson–Verfahren
Bei Verhältnisse werden bei kleineren Schrittweiten deutlich erreicht.
Man sieht auch deutlich die Überlegenheit des Simpson–Verfahrens. Für einen Fehler
von ungefähr 10−5 benötigt die Trapezregel 1024 Schritte und dass Simpson–Verfahren
nur 64 Schritte. Das Simpson–Verfahren ist in diesem Fall 10 mal so schnell.
2.5 Bewertung numerischer Ergebnisse
Ist die Stammfunktion einer zu integrierenden Funktion bekannt, so ist auch der exakte
Wert eines bestimmten Integrals bekannt. In diesem Fall fällt es leicht, die Güte eines
numerisch berechneten Wertes zu bewerten, indem man den exakten Wert mit dem numerischen Wert vergleicht. Ist der exakte Wert bzw. die Stammfunktion jedoch nicht
bekannt, und das ist der Regelfall für die numerische Integration, so können die numerisch bestimmten Werte auch nicht mehr so einfach bewertet werden. Letztendlich
lässt sich in der Numerik nicht mit Sicherheit eine Aussage treffen wie: „Das Ergebnis
ist auf 5 Stellen genau.“ In unserem Beispiel ist jedoch sicher, dass das Ergebnis der
numerischen Integration sich mit sinkender Schrittweite dem exakten Ergebnis nähert.
Das heißt jedoch nicht, dass das Ergebnis von Schritt zu Schritt besser werden muss,
sondern nur, dass das Ergebnis irgendwann besser wird. Ab welchem Punkt das Ergebnis nun jedoch wirklich besser wird, lässt sich nicht mit letzter Sicherheit sagen.
2
x
+ 4 · e10·(x−13) . Würde man
Abbildung 2.3 ist ein Schaubild der Funktion f (x) = 10
den Algorithmus aus Beispiel 2.2 auf diese Funktion anwenden, so erhielte man im
ersten, zweiten und dritten Durchgang exakt das gleiche Ergebnis und könnte bereits
nach dem 2. Schritt abbrechen und behaupten dass das Ergebnis im Rahmen der Maschinengenauigkeit exakt ist. Sobald die Schrittweite jedoch in die Größenordnung des
„Ausreißers“ um x = 13 kommt, wird des Integrationsergebnis vom vorherigen Wert
abweichen. Es kann also nie darauf verzichtet werden, ein Ergebnis kritisch zu betrachten. Ist dies gewährleistet, kann man die numerischen Werte jedoch sehr sicher und gut
beurteilen.
Im folgenden Abschnitt wird eine Funktion vorgestellt, die die Genauigkeit einer numerischen Berechnung beurteilt.
2.6. INTEGRATION OHNE STAMMFUNKTION
21
8
7
6
5
4
3
2
1
0
0
5
10
15
20
25
30
35
40
Abbildung 2.3: Funktion mit schwieriger Fehlerabschätzung
2.6 Integration ohne Stammfunktion
Bislang haben wir Funktionen untersucht, deren Stammfunktion bekannt war. Aus der
Sicht der Numerik ist dieser Fall jedoch weitgehend uninteressant, da man ja gerade
keine Numerik braucht, um Ergebnisse zu erhalten. Interessanter ist es, Funktionen zu
untersuchen, zu denen keine Stammfunktion bekannt ist, die aber integrierbar sind.
Beispiel 2.4
Berechnet werden soll der Integralwert der Funktion
Z
φ0
0
1
1 − cos φ
2
dφ,
0 ≤ φ0 ≤ π
(2.20)
Diese Funktion wurde nicht willkürlich gewählt. Die Ergebnisse dieses Abschnittes
können in Abschnitt 4 über Planetenbahnen verwendet werden. Im Zuge der Fehlerabschätzung wird ein neuer und besserer Algorithmus entwickelt werden. Beim
erneuten Betrachten von Beispiel 2.2 stellt man fest, dass eine Integration mit dem
Simpson–Verfahren auf dem Intervall [0.1; 1.1] mit einer Schrittweite von 1/10 den
Fehler 5.89 · 10−4 ergibt. Eine Integration auf dem Intervall [1; 2] ergibt bei gleicher
Schrittweite dagegen einen wesentlich kleineren Fehler von 2.15 · 10−9 . In Abbildung
2.1 wird deutlich, dass eine Näherung umso schlechter wird, je näher sich die Integrationsgrenzen bei x = 0 befinden. Bislang wurde das Intervall in gleich lange Unterintervalle zerteilt. Wünscht man eine bestimmte Genauigkeit, so müssen die Unterintervalle
auch an den ungünstigsten Stellen in der Nähe von x = 0 klein genug sein. Das heißt,
dass an günstigen Stellen die Länge der Unterintervalle unnötig klein ist. Das schadet
der Genauigkeit zwar nicht, bedeutet aber einen unnötigen Rechenaufwand. In einem
KAPITEL 2. NUMERISCHE INTEGRATION
22
neuen Algorithmus muss also eine Funktion zur Bestimmung der Schrittweite eingefügt werden. Solch ein Verfahren wird auch als Schrittweitensteuerung bezeichnet.
Prozedur Fläche_Berechnen (Anfang, Ende)
Genauigkeit = Bewerte_Genauigkeit_Intervall (Anfang, Ende) if
(Genauigkeit nicht ausreichend) then
Anzahl_Intervall=Unterteile_Intervall(Genauigkeit)
for a=1 to Anzahl_Intervalle
(Anfang*, Ende*) = Berechne_neu_Anfang_Ende(Anfang, Ende, Anzahl_I
Fläche_Berechnen (Anfang*, Ende*)
Next
end if
Ende Prozedur
Der Algorithmus lässt sich rekursiv verwenden. Das heißt, er unterteilt ein vorgegebenes Intervall in Unterintervalle und benutzt diese Unterintervalle in einem nächsten
Schritt wieder als vorgegebene Intervalle.
In Bezug auf die Abschätzung der Genauigkeit (siehe Kapitel 2.5) ist der Schritt in
Zeile 3 des Algorithmus besonders interessant. Diese Unterprozedur kann folgendermaßen umgesetzt werden:
Prozedur Bewerte_Genauigkeit_Intervall (Anfang, Ende)
Fläche1=Berechne_Fläche (Anfang, Ende)
Fläche2=Berechne_Fläche (Anfang, (Ende+Anfang)/2) + _
Berechne_Fläche ((Ende+Anfang)/2), Ende)
Bewerte_Genauigkeit_Intervall = Abs (Fläche1 - Fläche2)
Ende Prozedur
In dem Algorithmus Bewerte_Genauigkeit_Intervall wird also der Integralwert zuerst in einem und dann in zwei Schritten berechnet. Dabei wird davon ausgegangen, dass der Zwei–Schritt–Wert exakter ist. Vergleicht man nun die beiden Werte, so
kann man aus deren Unterschied die Qualität des ersten Ergebnisses bewerten. Möchte
man nun ein auf z.B. 5 Stellen genaues Ergebnis erhalten, so kann man den Algorithmus dann abbrechen, wenn sich die Werte Fläche1 und Fläche2 um weniger als
10−5−1 unterscheiden.
2.7 Numerische Integration und numerisches Lösen von
Differentialgleichungen
Beim numerischen Lösen von Differentialgleichungen tauchen viele Begriffe aus dem
Kapitel Integration wieder auf. So z.B. Schrittweite, Zwischenwerte und die Ordnung
eines Verfahrens. Außerdem können Verfahren wie z.B. die Schrittweitensteuerung
ähnlich übernommen werden.
Kapitel 3
Das Federpendel
Die erste zu lösende Differentialgleichung hängt nicht direkt mit dem Dreikörperproblem zusammen. Es wird ein Federpendel untersucht. Wie im vorherigen Kapitel über
numerische Integration lässt sich auch dieses Problem analytisch, also, im mathematischen Sinne, exakt lösen.
3.1 Grundlagen
Ein Federpendel besteht aus eine Masse (dem Pendel), die an einer Feder befestigt ist
und lose herunterbaumelt. Es wirken zwei Kräfte auf diese Masse. Zum einen ist da die
Gewichtskraft Fg . Die Ursache dieser Kraft sind die Massen des Pendels und die der
Erde, die sich gegenseitig anziehen. Die zweite Kraft stammt von der Feder. Wird sie
aus ihrer Ruhelage ausgelenkt, erzeugt sie eine Rückstellkraft. Da diese Kraft von der
Federkonstanten k abhängt, wird sie im Folgenden mit Fk abgekürzt. Ist das Pendel in
Ruhe (siehe Abbildung 3.1 Teil 1), so entspricht das einem Gleichgewicht der beiden
Kräfte. Nach den Newtonschen Axiomen (siehe Abschnitt 1.2.3) bedeutet das, dass die
Masse ihre Geschwindigkeit nicht mit der Zeit verändert. Das Pendel bleibt also in Ruhe. Lenkt man das Pendel um eine Strecke −x aus seiner Ruheposition aus (siehe Abb.
3.1 Teil 2), wird eine der beiden Kräfte größer. Ein negatives Vorzeichen bedeutet dabei „Auslenkung nach unten“. Für diesen Fall wird die Federkraft größer und bei einer
Auslenkung nach oben entsprechend kleiner. Da jetzt kein Kräftegleichgewicht mehr
herrscht, wird die Masse in Richtung der resultierenden Kraft beschleunigt, sobald man
sie wieder los lässt.
3.2 Die Bewegungsgleichung
Um einen Körper zu veranlassen, seinen geradlinig gleichförmigen Bewegungszustand
aufzugeben, also um ihn zu beschleunigen, muss eine Kraft auf ihn wirken. Die Beschleunigung ist proportional zu dieser Kraft. Das sind die ersten zwei Newtonschen
Axiome (siehe Abschnitt 1.2.3). Das 2. Newtonsche Axiom besagt
¨.
F~ = m~a = m~x
(3.1)
Gleichungen dieser Art werden Bewegungsgleichungen genannt. Wenn wir mit x die
Auslenkung der Pendelmasse aus seiner Ruhelage bezeichnen, hat das Federpendel die
23
KAPITEL 3. DAS FEDERPENDEL
24
Abbildung 3.1: Das Federpendel
folgende Bewegungsgleichung:
X
Fi = FG + Fk = −mg − (kx − mg) = −kx = ma = mẍ
(3.2)
k
x.
m
Das ist eine Differentialgleichung 2. Ordnung in x. Die Lösung kann, wie in Abschnitt
1.3.2 beschrieben, ermittelt werden. Die Lösung, der „harmonischer Oszillator“, ist
eine Funktion der Art
x(t) = A sin(ωx + δ)
(3.3)
p
mit ω = k/m. Die Richtigkeit kann leicht geprüft werden, indem man die Funktion
x(t) zweimal ableitet und die Ableitung sowie die Funktion in Gleichung 3.2 einsetzt.
Außerdem kann mit dem Satz von Picard-Lindelöf überprüft werden, dass die Lösung
eindeutig ist, es also keine zweite Lösung mehr gibt. Zum Zeitpunkt t = 0 ist die
Auslenkung dabei x(t = 0) = 0. Damit das System nicht wie oben beschrieben im
Ruhezustand ist, kann die Geschwindigkeit zu diesem Zeitpunkt also nicht 0 sein v(t =
0) 6= 0. Die Konstanten A, B, ω und δ werden durch die Anfangsbedingungen x(t =
0) und y(t = 0) und durch die Rahmenbedingungen m und k bestimmt.
Über einfache Umformungen gelangt man zu
ωx0
− ωt0
(3.4)
δ = arctan
v0
ẍ = −
und
A=
x0
.
sin(ωt0 + δ)
(3.5)
Eine erste intuitive Möglichkeit zur numerischen Berechnung wird nun vorgestellt.
3.3. EINFACHE NUMERISCHE LÖSUNG
25
3.3 Einfache numerische Lösung
Ähnlich wie in Abschnitt 2 muss auch hier integriert werden. Bekannt ist ein Anfangspunkt (x0 , ẋ0 ) und alle Kräfte und Gesetze um die Auslenkung der Masse und ihre
Geschwindigkeit vorrauszusagen. Unbekannt ist jedoch ẍ(t). Wäre diese Funktion bekannt, müsste nur noch einmal für die Geschwindigkeit und einmal für den Ort integriert werden.
Z
Z
t
t
a(s) ds =
t0
und
Z
t0
t
v(s) ds =
t0
Z
ẍ(s) ds = ẋ(t) − ẋ(t0 )
(3.6)
ẋ(s) ds = x(t) − x(t0 ).
(3.7)
t
t0
Das Wissen über die numerische Integration wird also von Nutzen sein. Die erste und
einfachste Methode ist, davon auszugehen, dass sich die Beschleunigung in dem Zeitintervall I = [t0 ; t0 + ∆t] nicht sehr verändern wird. Das heißt, wir nehmen an,
a(t) = a(t0 ) im gesamten Intervall I. Dieses Verfahren ist auch als Euler–Verfahren
bekannt. Für die Integration gilt dann
Z t
v(t) − v(t0 ) =
a ds = at
(3.8)
t0
und
x(t) − x(t0 ) =
Z
t
v(s) ds =
t0
1 2
at + v(t0 )t
2
(3.9)
Dabei ist die Beschleunigung zum Zeitpunkt t0 gegeben durch
a(t0 ) =
F (t0 )
−k
=
x(t0 ).
m
m
(3.10)
Jetzt kann man bereits einen kleinen Algorithmus schreiben.
tAktuell = 0
until tAktuell>GrenzeZeit
a=-k*x/m
vNeu=vAlt + a*t
xNeu=xAlt + vAlt*t + a*t^2/1
tAktuell=tAktuell + t
do loop
Abbildung 3.2 zeigt Ergebnisse, die nach dem oben beschriebenen Muster errechnet wurden. Die Anfangswerte sind dabei x(t0 ) = 5, v(t0 ) = 0 und t0 = 0. Das
Pendel wird also um 5 LE (Längeneinheiten) ausgelenkt und dann losgelassen. Die
Rahmenbedingungen
sind möglichst einfach gewählt als k = 8, m = 2 und somit
p
ω = k/m = 2.
Das Diagramm zeigt zwei Reihen von numerisch vorhergesagten Kurven. Die erste
Reihe wurde mit einer Schrittweite ∆t = 0.1 und die zweite Reihe mit einer Schrittweite von ∆t = 0.05 berechnet. Da auf 20 Zeiteinheiten vorausgesagt werden sollte,
ergibt das 200 Rechenschritte für die erste und 400 Rechenschritte für die zweite Reihe. Wie in Abbildung 3.2 zu sehen ist, wird die Amplitude der numerischen Lösung, im
KAPITEL 3. DAS FEDERPENDEL
26
40
Schrittweite 0,1s
Schrittweite 0,05s
Ort
30
20
10
0
−10
−20
−30
0
5
10
15
20
Abbildung 3.2: Erste Ergebnisse
Vergleich zur korrekten Amplitude, immer größer. Eine deutliche Abweichung von der
exakten Lösung zeigt sich bereits nach der ersten kompletten Schwingung. Im ersten
Viertel dieser Periode wird das Pendel nach unten beschleunigt. Da der Integrationsalgorithmus zur Voraussage der Beschleunigung einfach den Wert der Beschleunigung
zu Beginn eines Schrittes nimmt, ist diese immer zu groß, die Pendelmasse wird also
zu schnell. Im 2. Viertel hingegen ist die Beschleunigung immer zu klein, die Pendelmasse wird also zu wenig gebremst. Beide Punkte führen dazu, dass die Amplitude
immer stärker anwächst. Die Nulldurchgänge hingegen weisen keine sichtbaren Fehler
auf. In dieser Hinsicht gleichen sich die zu starke und zu schwache Beschleunigung
aus.
Offensichtlich sind die Vorhersagen sehr ungenau. Wollte man auf diese Weise sicherstellen, nicht vor ein Pendel zu laufen, so sollte man sich nicht zu sehr in Sicherheit
wiegen. In späteren Kapiteln, in denen das Dreikörperproblem offensichtlicher behandelt wird, geht es bei der Frage nach der Genauigkeit dann nicht mehr um eine Beule
sondern z.B. um einen Satellit, der abstürzen könnte oder auch einfach sein Ziel verfehlt, wenn er nicht genau gesteuert wird. Der Zeitaufwand der Rechnung ist allerdings
auch noch nicht sehr groß. Für die erste Reihe beträgt er 1/200s und für die zweite Reihe 1/100s.
Im Folgenden wird nicht mehr die ganze Bahn des Pendels betrachtet. Es soll nur noch
der Ort und die Geschwindigkeit zu einem bestimmten Zeitpunkt in der Zukunft berechnet werden.
3.4. 2-SCHRITT-VERFAHREN
27
3.4 2-Schritt-Verfahren
Die Vorgehensweise entspricht in etwa der bei der numerischen Integration. Bislang
wurde die Beschleunigung ẍ einfach als für einen gewissen Zeitraum konstant betrachtet. Jetzt soll, wie z.B. bei der Trapezregel, die Beschleunigung durch eine lineare
Funktion angenähert werden.
Um eine Gerade festlegen zu können, benötigt man allerdings zwei Wertepaare (x i , ẋi ), i =
1, 2. Da die Funktion ẍ(t) jedoch nicht bekannt ist, muss mit Hilfe von zuvor bekannten Werten eine Vorhersage gemacht werden. Als Startwert ist in der Regel jedoch nur
ein Paar gegeben. Das zweite Paar kann aber über penible Integration nach der ersten
Methode beliebig genau ermittelt werden. Dies stellt aufgrund der Einmaligkeit keinen
zu hohen Aufwand dar. Das Verfahren liefert bereits wesentlich bessere Ergebnisse als
das Verfahren aus dem vorherigen Kapitel. Da man in üblichen Diagrammen die Abweichungen nur noch schlecht sehen kann, werden nicht mehr die kompletten Bahnen
sondern nur noch die Position zu einem bestimmten Zeitpunkt betrachtet. Tabelle 3.1
stellt Ergebnisse eines 1-Schritt- und eines 2-Schritt-Verfahren dar. Es sollte der Ort
des Körpers in 20 Zeiteinheiten vorausgesagt werden. Der exakte Wert ist
x(20) = 5 cos(2 · 20) = −3.3346903082 · · · .
Die Werte des 1-Schritt-Verfahren der Werten aus dem vorigen Kapitel. Der ZeitSchrittweite
0.100
0.050
0.010
0.005
0.001
1-Schritt
-20.44933
-8.83391
-4.08736
-3.69380
-3.40389
Fehler
5.132E+00
1.649E+00
2.257E-01
1.077E-01
2.075E-02
2-Schritt
-4.60342
-3.65619
-3.34726
-3.33781
-3.33481
Fehler
3.805E-01
9.641E-02
3.769E-03
9.370E-04
3.729E-05
Tabelle 3.1: Vergleich zweier Verfahren
aufwand bei gleicher Schrittweite steigt um 50%. Wichtiger ist jedoch der Aufwand,
der benötigt wird, um eine bestimmte Genauigkeit zu erreichen. Soll der relative Fehler etwa 1 · 10−1 betragen, so ist das 1-Schritt-Verfahren auf eine Schrittweite von
0.005 angewiesen. Das 2-Schritt-Verfahren erreicht diese Genauigkeit bereits bei einer
Schrittweite von 0.05 und muss damit nur 1/10 der Schritte ausführen. Insgesamt ist
das 2-Schritt-Verfahren ca. 5 mal so schnell.
3.5 Mehrschrittverfahren
Das 2-Schritt-Verfahren ist deutlich besser (schneller, billiger) als das 1-Schritt-Verfahren.
Dieses Kapitel behandelt die Frage, wie viele Schritte sinnvoll sind.
In Abbildung 3.3 werden die Voraussagen für die Beschleunigung ẍ(t) im Bereich
[0.2, 0.25] dargestellt. Wie beschrieben benötigt ein n-Schritt-Verfahren dafür n Schritte. Mit der steigenden Anzahl der Schritte wird die Voraussage der unbekannten Beschleunigung genauer. Anschaulich wird klar, dass die Genauigkeit mit steigender Anzahl der Schritte steigt. Bei einem n-Schritt-Verfahren wird die Beschleunigung durch
ein Polynom vom Grad n−1 interpoliert. Die Stützstellen des Polynoms sind die Punkte
KAPITEL 3. DAS FEDERPENDEL
28
−12
Exakte Kurve
1-Schritt
−13
2-Schritt
3-Schritt
−14
♦
+
−15
−16
+ +
+
+
−17
+
+
+
+
+
+
+
+
+
+
+
+
+
+
♦ ♦ ♦ ♦ +
♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦ ♦
+
−19
+
+
+
−20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
−18
Abbildung 3.3: verschiedene Interpolationenen
(x1 , f (x1 )) , (x2 , f (x2 )) , . . . , (xn , f (xn )). Das Polynom ist dann von der Form p(x) =
a0 + a1 x + . . . + an−2 xn−2 + an−1 xn−1 . Wie bereits in (3.8) und (3.9) lässt sich dann
der Ort und die Geschwindigkeit zu einem späteren Zeitpunkt voraussagen.
v(t) = v(t0 ) +
Z
t
p(s) ds
t0
a1
an−1 n
= v(t0 ) + a0 h + h2 + . . . +
h
2
n
(3.11)
und
x(t) =
Z tZ
t0
t
p(s) ds
t0
= x(t0 ) + v(t0 )h +
a0 2 a1 3
an−1
h + h + ... +
hn+1
2
6
n · (n + 1)
(3.12)
mit der Schrittweite h = (t − t0 ). x(t) wird also durch ein Polynom vom Grad (n + 1)
und v(t) durch ein Polynom vom Grad n errechnet. Welche Auswirkungen das auf die
Ergebnisse hat, wird in Tabelle 3.2 zusammengestellt. Dabei wurden erneut der Ort
und die Geschwindigkeit des Pendels zwanzig Sekunden in die Zukunft vorausgesagt.
Eingetragen wurden nur die Fehler des Ortes. Die Fehler in der Geschwindigkeit weisen keine qualitativen Unterschiede auf.
Betrachtet man die Verhältnisse der Fehler von Schritt zu Schritt, so stellt man fest,
dass sich die Fehler beim 1-Schritt-Verfahren in etwa halbieren und bei den anderen
Verfahren vierteln. Das 1-Schritt-Verfahren scheint von der Ordnung 1 und die anderen von der Ordnung 2 zu sein.
3.6. DIE ORDNUNG EINES 1-SCHRITT-VERFAHREN
Schrittweite
1/10
2−1 /10
2−2 /10
2−3 /10
2−4 /10
Fehler Ort 1
5.13E+00
1.65E+00
6.50E-01
2.89E-01
1.36E-01
Fehler Ort 2
3.80E-01
9.64E-02
2.39E-02
5.90E-03
1.47E-03
Fehler Ort 3
4.36E-02
1.43E-02
4.08E-03
1.09E-03
2.81E-04
29
Fehler Ort 4
6.53E-02
1.82E-02
4.65E-03
1.17E-03
2.91E-04
Tabelle 3.2: Ergebnisse von Mehrschrittverfahren
3.6 Die Ordnung eines 1-Schritt-Verfahren
In [16, S.114] wird beschrieben, wie der Fehler-Begriff, der in Kapitel 2.5 bereits eingeführt wurde, auf Differentialgleichungen anzuwenden ist. Danach wird gezeigt, was
ein Verfahren höherer Ordnung ausmacht.
Zuerst also zum Fehlerbegriff, wobei die bislang behandelte Differentialgleichung des
Federpendels als Beispiel dienen soll. Wie man bereits an den Mehrschrittverfahren
sehen konnte (siehe Gleichungen 3.8, 3.9, 3.11 und 3.12) sind die Gleichungen zur
Vorhersage von Ort und Geschwindigkeit immer vom Typ
x(t) = x(t0 ) + (t − t0 )φ(x(t0 ), v(t0 ), (t − t0 ))
v(t) = v(t0 ) + (t − t0 )φ(x(t0 ), v(t0 ), (t − t0 )).
Dabei war bei den Mehrschrittverfahren die Funktion φ(x(t0 ), v(t0 ), (t − t0 )) ein Polynom mit Koeffizienten, die aus vorhergehenden Werten errechnet wurden. Im Einschrittverfahren hat sie folgende Gestalt.
φ(x(t0 ), v(t0 ), (t − t0 )) = v(t0 ) −
k
x(t0 )(t − t0 )
2m
(3.13)
für den Ort und
φ(x(t0 ), v(t0 ), (t − t0 )) = −
k
x(t0 )
m
(3.14)
für die Geschwindigkeit zum Zeitpunkt t. Wie zuvor ist dabei k die Federkonstante und
m die Masse des Pendels.
Um die Übersichtlichkeit zu wahren, wird im Folgenden nur noch der Fehler des Ort
betrachtet. Seien nun t0 und x(t0 ) beliebige aber festgelegte Anfangswerte und Ort(t)
der exakte Wert des Orts zum Zeitpunkt t. Dann gibt die Funktion
(
x(t)−x(t0 )
(t − t0 ) 6= 0
t−t0
∆ (x(t0 ), y(t0 ), (t − t0 )) :=
(3.15)
v(t)
(t − t0 ) = 0
den Differenzenquotienten der exakten Lösung x(t) zur Schrittweite (t − t 0 ) an, während φ(x(t), y(t), (t − t0 )) der Differenzenquotient zur Schrittweite (t − t0 ) der durch
φ gelieferten Näherungslösung ist. Die Größe der Differenz
τ (x(t), y(t), (t − t0 )) = ∆ (x(t0 ), y(t0 ), (t − t0 )) − φ(x(t), y(t), (t − t0 ))
gibt dann an, wie gut die Gleichung des Einschrittverfahrens die exakte Lösung der
Differentialgleichung erfüllt: Sie ist ein Maß für die Güte des Näherungsverfahrens.
KAPITEL 3. DAS FEDERPENDEL
30
τ (x(t), y(t), (t − t0 )) wird lokaler Diskretisierungsfehler an der Stelle (t, x(t)) des
betreffenden Verfahrens genannt. Dieser Fehler steht nicht in Konkurenz zu dem relativen Fehler, der bislang angegeben wurde. Vielmehr charakterisiert er den Fehler für
einen Schritt und ist nicht dafür zuständig, einen Wert, der durch Aneinanderreihung
sehr vieler Schritte entstanden ist, zu bewerten. In Abschnitt 5.1 wird gezeigt, dass die
Ordnung des Fehlers auch bei vielen Schritten erhalten bleibt.
Will man die Ordnung eines Verfahrens bestimmen, hilft die Taylorentwicklung:
x(t) = x(t0 ) + (t − t0 )x0 (t0 ) +
(t − t0 )2 00
x (t0 ) + . . .
2
(3.16)
Die Ableitungen sind in unserem Fall bekannt.
x0 (t) = v(t)
k
x(t)
m
k
k
x(3) (t) = − x0 (t) = − v(t)
m
m
..
.
x00 (t) = v 0 (t) = −
(3.17)
(3.16) lässt sich umformen zu
x(t) − x(t0 )
= ∆ (x(t0 ), y(t0 ), (t − t0 ))
t − t0
k
k
= v(t0 ) −
Ort(t0 )(t − t0 ) −
v(t0 )(t − t0 )2 + . . .
2m
6m
(3.18)
Für das 1-Schritt-Verfahren entsprechen die ersten 2 Summanden gerade der Funktion
φ (siehe Gleichung 3.13). Somit ist der lokale Diskretisierungsfehler
τ (x(t0 ), y(t0 ), (t − t0 )) = ∆(x(t0 ), y(t0 ), (t − t0 )) − φ(x(t0 ), y(t0 ), (t − t0 ))
k
v(t0 ) + . . .
= (t − t0 )2 −
6m
⇒ τ (x(t0 ), y(t0 ), (t − t0 )) = O((t − t0 )2 ).
(3.19)
Allgemein spricht man von einem Verfahren der Ordnung p falls für den lokalen Diskretisierungsfehler τ = O((t−t0 )p ) gilt . Das 1-Schritt-Verfahren ist also ein Verfahren
2. Ordnung für den Ort und eines 1. Ordnung für die Geschwindigkeit.
Da der Ort auch von der Geschwindigkeit abhängt, kann nach vielen Schritten der Fehler des Ortes nicht besser sein als der Fehler der Geschwindigkeit. Insgesamt ist dieses
Einschrittverfahren also von der Ordnung 1.
3.7 Verfahren höherer Ordnung
Das vorherige Kapitel gibt uns die Möglichkeit, auf einfache Art und Weise 1-SchrittVerfahren von höherer Ordnung zu gewinnen. Dafür werden höhere Ableitungen benötigt, die jedoch in unserem Beispiel relativ einfach zu erhalten sind (siehe 3.17). In
Tabelle 3.3 werden Ergebnisse eines 1-Schritt-Verfahrens der Ordnung 2, 3 und 4 verglichen. Es wurden mit den bislang üblichen Konstanten die Werte für die Geschwin-
3.8. VERGLEICH MEHRSCHRITT- UND 1-SCHRITT-VERFAHREN
Schrittweite
1/10
2−1 /10
2−2 /10
2−3 /10
2−4 /10
2. Ordnung
3.08E-01
7.74E-02
1.91E-02
4.72E-03
1.17E-03
Verhälnis
3.98
4.05
4.04
4.03
3. Ordnung
1.07E-02
1.51E-03
1.99E-04
2.55E-05
3.22E-06
Verhältnis
7.10
7.60
7.81
7.91
4. Ordnung
6.76E-04
3.99E-05
2.41E-06
1.48E-07
9.18E-09
31
Verhältnis
Tabelle 3.3: Vergleich Verfahren verschiedener Ordnung
digkeit und den Ort zum Zeitpunkt t = 20 vorausgesagt. Dann wurden die Fehler und
das Verhältnis zweier aufeinanderfolgender Fehler berechnet. Da die Schrittweite sich
jeweils halbiert, ist das Verhältnis bei dem Verfahren 2. Ordnung wie erwartet ungefähr 22 = 4, bei dem Verfahren 3. Ordnung 23 = 8 und bei dem Verfahren 4. Ordnung
24 = 16. Die Fehler und deren Verhältnisse bei der Geschwindigkeit verhalten sich
qualitativ gesehen identisch.
3.8 Vergleich Mehrschritt- und 1-Schritt-Verfahren
Betrachtet man nun die Ergebnisse eines Mehrschrittverfahrens, wie sie in Tabelle 3.2
dargestellt sind, so sieht man, dass das 1-Schritt-Verfahren von der Ordnung 1 ist. Das
heißt, dass sich die Genauigkeit verdoppelt, wenn die Schrittweite halbiert wird. Alle
weiteren Verfahren sind den Zahlen nach von der Ordnung 2. Das heißt, dass sich ab einem 3-Schritt-Verfahren die Fehler der Voraussagen nicht mehr besonders verbessern.
Einen Grund dafür kann in [16, S.141] nachgelesen werden.
Die 1-Schritt-Verfahren höherer Ordnung sind den hier gezeigten Mehrschrittverfahren deutlich in der Regel überlegen. Das liegt vor allem auch daran, dass für die
1-Schritt-Verfahren keine interpolierenden Polynome berechnet werden müssen. Der
große Nachteil der 1-Schritt-Verfahren liegt bislang darin, dass man die Ableitung explizit kennen muss. Auf der einen Seite waren die Ableitungen für das Federpendel
sehr einfach, auf der anderen Seite ist das jedoch auch kein Wunder, da ja sogar eine
analytische Lösung bekannt ist. Im nächsten Kapitel werden kompliziertere Differentialgleichungen betrachtet, so dass das hier geschilderte 1-Schritt-Verfahren verbessert
werden muss.
16.95
16.53
16.28
16.15
32
KAPITEL 3. DAS FEDERPENDEL
Kapitel 4
Planetenbahnen
Der nächster Schritt in Richtung Dreikörperproblem sind die Bahnen von Planeten
um eine Sonne, bekannt als das Kepler-Problem (siehe auch Abschnitt 1.2.2 über die
Keplerschen Gesetze). Die Erde bewegt sich nach dem ersten Keplerschen Gesetz auf
einer Ellipsenbahn um die Sonne. Die Keplerschen Gesetze stellen eine Näherung dar,
da nur die Kräfte der Sonne auf die Planeten berücksichtigt werden. Der Fehler ist
jedoch gering, da die Masse der Sonne erheblich größer ist als die Masse der Planeten.
Für unser Sonnensystem gilt z.B. MSonne = 332000 · MErde .
4.1 Analytische Lösung
Das Kepler-Problem lässt sich analytisch lösen, wie in [1, S.104] nachgelesen werden
kann. Das heißt, es gibt eine geschlossene Form, die den Ort und die Geschwindigkeit
des Planeten angibt.
Da die Gravitationskraft konservativ und zentral ist, sind Energiesatz und Flächensatz
gültig; die Bewegung findet also in einer ebene Bewegung statt. Um die Bahn zu ermitteln, kann an Stelle von den Bewegungsgleichungen auch gleich von diesen zwei
Sätzen (zwei Differentialgleichungen erster Ordnung) ausgegangen werden. Mit den
Bezeichnungen aus Abbildung 4.1 und r = |~x| ergibt sich in Polarkoordinaten die potentielle Energie als − Mrm und die kinetische Energie als 1/2m(ṙ 2 + r2 ϕ̇2 ). Somit
lautet der Energiesatz (dividiert durch m):
1
M
m(ṙ2 + r2 ϕ̇2 ) −
=c
2
r
(= konst.),
(4.1)
der Flächensatz aber, der zugleich das zweite Keplersche Gesetz darstellt, hat die Form
r2 ϕ̇ = h (= konst.)
(4.2)
Zu Beginn soll die Bahn r = r(ϕ) des Planeten bestimmt werden. Zu diesem Zweck
wird die Zeit aus den obigen Gleichungen eliminiert. Die in Gleichung 4.1 auftretenden
Größen ϕ̇ und ṙ können mit Gleichung 4.2 folgendermaßen ausgedrückt werden:
ϕ̇ =
h
,
r2
ṙ =
dr
dr
dr h
=
ϕ̇ =
· .
dt
dϕ
dϕ r2
33
(4.3)
KAPITEL 4. PLANETENBAHNEN
34
Abbildung 4.1: Werte einer Planetenbahn
Setzt man dies in Gleichung 4.1 ein, so ergibt sich
"
#
2
h2
2M
h dr
+ 2 −
= 2c,
r2 dϕ
r
r
(4.4)
d.h. eine Differentialgleichung für die gesuchte Funktion r(ϕ). Anders geschrieben
lautet diese
r
dr
r2
2M
h2
2c +
=
− 2
dϕ
h
r
r
oder
dϕ = q
h/r2
2c +
2M
r
−
h2
r2
(4.5)
dr.
Die Integration ist einfach, da der Ausdruck unter der Wurzel folgendermaßen umgeformt werden kann.
α 2 − u2 ,
wobei α2 = 2c +
M2
,
h2
u=
M
h
− .
h
r
α2 ist eine Konstante, u eine neue Integrationsveränderliche: du =
Gleichung 4.5 die folgende Form an:
dϕ = √
du
,
− u2
α2
ihr Integral lautet:
ϕ + k = arccos
u
α
(k ist eine Konstante).
h
r 2 dr.
So nimmt
4.2. BEWEGUNGSGLEICHUNGEN
35
Aus dieser Gleichung und aus der Bedeutung von u ergibt sich
u = α cos(ϕ + k) =
M
h
− ,
h
r
woraus
r=
M
h
h
=
− α cos(ϕ + k)
1−
h2 /M
αh
M cos(ϕ + k)
folgt. Wir setzen die Abkürzung
p=
h2
,
M
=
αh
M
und wählen die Konstante k zu Null, indem wir den Winkel ϕ vom maximalen Wert
von r aus messen (dann ist nämlich für ϕ = 0 : cos(ϕ + k) = 1, also k = 0. Somit
ergibt sich die Bahngleichung
r=
p
.
1 − cos(ϕ)
Dies bedeutet, wie aus der analytischen Geometrie bekannt, einen Kegelschnitt, von
dessen Brennpunkten einer der Anfangspunkt des Polarkoordinatensystem, d.h. der
Massenpunkt M ist. Dieser Satz ist - am Sonnensystem angewandt - das erste Keplersche Gesetz. Die Bahn ist eine Ellipse, Parabel oder Hyperbel, je nachdem, ob die
numerische Exzentrizität kleiner, gleich oder größer als 1 ist. Um in den folgenden
Kapiteln die Ergebnisse der numerischen Lösungsverfahren mit den exakten Ergebnissen vergleichen zu können, benötigen wir außer der Bahngleichung noch die Zeitabhängigkeit der Koordinaten r und ϕ. Aus dem Flächensatz r 2 ϕ̇ = h (4.2) folgt nämlich
die dem Winkel ϕ entsprechende Zeit:
t=
1
h
Z
ϕ
r2 dϕ = t(ϕ).
ϕ0
Die Umkehrfunktion liefert ϕ = ϕ(t), und damit ist, wegen r = r(ϕ) = r[ϕ(t)],
auch r als Funktion der Zeit bestimmt; Das Problem ist also im Prinzip gelöst. Das
obige Integral kann aber in geschlossener expliziter Form nicht ausgedrückt werden.
Zur Bahnbestimmung kann ein numerisches Integrationsverfahren wie die SimpsonRegel verwendet werden (siehe Beispiel 2.3 in Abschnitt 2.4). Gegeben ist aber nicht
eine Integrationsgrenze sondern eine Zeit. Das erfordert jedoch nur kleine Änderungen
im Algorithmus.
4.2 Bewegungsgleichungen
Das Kepler-Problem ähnelt dem Federpendel, spielt sich jedoch im 2-dimensionalen
ab. Die Differentialgleichungen der Bewegung erhält man erneut, indem man alle Kräfte, die auf den Planeten wirken, addiert und diese Summe mit dem Produkt aus der
Beschleunigung und der Planetenmasse gleich setzt.
mM~x
F~g = −
|~x|3
(4.6)
KAPITEL 4. PLANETENBAHNEN
36
Die Gleichung ist vektorwertig. Wie in Kapitel 4.1 beschrieben, bewegt sich der Planet
jedoch in einer festen Ebene. Für die Komponenten der Bewegungsgleichung gilt dann
ẍi =
Fx i
M
x
p i
= −p
2
2
m
2
2
x0 + x21
x +x
0
1
M
= − 3 xi ,
r
(4.7)
i = 1, 2
Diese Differentialgleichung sind komplizierter als die Gleichungen des Federpendels
(siehe Gleichung 3.2 auf Seite 24).
4.3 Erste Planetenbahnen
Die Ergebnisse aus Kapitel 3.3 können auch für Planetenbahnen verwendet werden,
indem man die 2 Komponenten, aus denen sich sowohl der Ort als auch die Geschwindigkeit zusammensetzen, getrennt betrachtet. Der folgende Algorithmus skizziert die
Vorgehensweise:
%Abstand zum Zeitpunkt t0
r=BerechneAbstand(Ort(0),Ort(1))
% Komponente 0
Geschw(0) = VorraussageGeschw1 (r,t)
Ort(0)
= VorraussageOrt1 (r,t)
% Komponente 1
Geschw(1) = VorraussageGeschw2 (r,t)
Ort(1)
= VorraussageOrt2 (r,t)
Die Funktionen zur Voraussage von Ort und Zeit haben dabei die folgende Form.
v(0, t) = v(0, t0 ) − (t − t0 )
x(0, t0 )
r2
x(0, t) = x(0, t0 ) + (t − t0 ) · v(0, t0 ) −
(t − t0 )2 x(0, t0 )
2
r2
für die Komponente 0, und
v(1, t) = v(1, t0 ) − (t − t0 )
x(1, t0 )
r2
x(1, t) = x(1, t0 ) + (t − t0 ) · v(1, t0 ) −
(t − t0 )2 x(1, t0 )
2
r2
für die Komponente 1. Da die Diagramme 2-dimensional sind, kann der Ort nicht mehr
in Abhängigkeit von der Zeit aufgetragen werden. In Abbildung 4.2 sind die Bahnen
eines Planeten dargestellt. Die zu Grunde liegenden Daten
5
0
MSonne = 500, ~x0 =
und ~v0 =
0
10
sind gerade so gewählt, dass die Bahn eine Kreisbahn ergibt. In Abbildung 4.3 ist die
x0 -Komponente gegen die Zeit aufgetragen. Das Diagramm erinnert an die Schwingung des Pendels, die in Kapitel 3 untersucht wurde (siehe Abbildung 3.2).
Im Falle der Planetenbahnen treten jedoch zwei Effekte auf, die die Ergebnisse der
numerischen Integration von dem exakten Ort abweichen lassen:
4.3. ERSTE PLANETENBAHNEN
37
6
b0.005
0.01
Exakt
b
b
e
4
2
b
0
u
b
bb
b
b
−2
−4
−6
−6
b
b b
−4
−2
0
2
4
6
Abbildung 4.2: Planetenbahn
1. Der Abstand des Planeten von der Sonne, der bei einer Kreisbahn konstant sein
muss, wird immer größer.
2. Die Planeten fallen gegenüber dem exakten Ort mit der Zeit zurück. Sie brauchen
also immer länger, um die Sonne einmal komplett zu umrunden.
Die Gründe für diese Effekte sind jedoch anderer Art als die beim Federpendel, auch
wenn zumindest der erste dem Effekt gleicht, der beim Federpendel zu beobachten
war (vergleiche Abbildung 3.2, Seite 26, mit Abbildung 4.3) Zuerst werden die ersten Integrationsschritte betrachtet. Die Situation sei wie in Abbildung 4.2. Dann ist
die Näherungslösung nach dem ersten Schritt links oberhalb der exakten Lösung. Die
Beschleunigungen sowohl in x1 –Richtung als auch in −x0 –Richtung werden als zu
groß angenommen. Dies entspricht zunächst nicht dem Eindruck, der in der Aufzählung dargestellt ist. Nachdem 1/4 der Kreisbahn zurückgelegt ist, fällt die genäherte
Bahn jedoch hinter der exakten Bahn zurück. Der Grund ist der, dass die genäherte
Bahn sich, wie oben beschrieben, weiter vom Gravitationszentrum entfernt haben. Der
Planet erfährt also eine geringere Kraft und kommt nicht mehr so gut in die Kurve wie
der tatsächliche Planet es kann. Dieser Vorgang wiederholt sich in jedem Viertel, so
dass die Näherungslösung mit der Zeit immer weiter nach außen gedrängt wird. Dadurch erhöht sich die Umlaufdauer und die Näherungslösung fällt immer stärker hinter
die exakte Lösung zurück.
Insgesamt bietet das 1-Schritt-Verfahren der Ordnung 1 also ein schlechtes Bild. Selbst
bei sehr kleinen Schrittweiten wird der Fehler schon nach kurzer Zeit so groß, dass er
nicht mehr toleriert werden kann.
KAPITEL 4. PLANETENBAHNEN
38
8
0.005
0.01
Exakt
6
4
2
0
−2
−4
−6
−8
0
2
4
6
8
10
Abbildung 4.3: Zeitabhängigkeit der x0 Komponente
4.4 Polarkoordinaten
Nun werden die Bewegungsgleichungen
in Polarkoordinaten aufgestellt. Gleichung 4.7
p
kann mit dem Abstand r = x20 + x21 und dem Winkel ϕ folgendermaßen geschrieben
werden.
−M cos(ϕ))/r 2
ẍ0
Fx0 /m
=
=
−M sin(ϕ)/r 2
Fx1 /m
ẍ1
Um die Differentialgleichung komplett nach Polarkoordinaten zu transformieren, kann
man wie folgt vorgehen. Mit der Transformationsvorschrift x0 = r cos ϕ und x1 =
r sin ϕ gilt
! d
d2
ẍ0
2 (r cos ϕ
dt
dt (ṙ cos ϕ − r ϕ̇ sin ϕ)
=
=
2
d
d
ẍ1
dt (ṙ sin ϕ + r ϕ̇ cos ϕ)
dt2 (r sin ϕ
r̈ cos ϕ − ṙϕ̇ sin ϕ − ṙϕ̇ sin ϕ − rϕ̈ sin ϕ − rϕ̇2 cos ϕ
=
r̈ sin ϕ + ṙϕ̇ cos ϕ + ṙϕ̇ cos ϕ + rϕ̈ cos ϕ − rϕ̇2 sin ϕ
r̈ cos ϕ − 2ṙϕ̇ sin ϕ − rϕ̈ sin ϕ − rϕ̇2 cos ϕ
=
r̈ sin ϕ + 2ṙϕ̇ cos ϕ + rϕ̈ cos ϕ − rϕ̇2 sin ϕ.
Damit kann man jetzt zwei Differentialgleichungen aufstellen. Da bei Polarkoordinaten
keine Vektorschreibweise üblich ist, werden die Gleichungen als zwei einzelne Gleichungen betrachtet.
−M cos(ϕ)/r 2 = r̈ cos ϕ − 2ṙϕ̇ sin ϕ − rϕ̈ sin ϕ − rϕ̇2 cos ϕ
−M sin(ϕ)/r 2 = r̈ sin ϕ + 2ṙϕ̇ cos ϕ + rϕ̈ cos ϕ − rϕ̇2 sin ϕ
(4.8)
Sie lassen sich relativ leicht in eine gewohnte Form umwandeln. Zuerst wird ϕ̈ eliminiert, indem man die erste Gleichung durch sin ϕ und die zweite durch cos ϕ dividiert
4.5. ELLIPSENBAHNEN
39
und dann beide addiert. Dann eliminiert man r̈ indem die erste Gleichung durch cos ϕ
und die zweite durch sin ϕ dividiert wird und dann die Gleichungen voneinander abzieht. Dadurch erhält man zwei neue Gleichungen:
ϕ̈ = −2ṙϕ̇/r
r̈ = rϕ̇2 − M/r 2
(4.9)
Diese Information kann auch auf einem kürzeren und direkteren Weg erreicht werden
[11, S.29]. So besteht die radiale Beschleunigung aus zwei Termen, nämlich der zweiten Ableitung der Radialkomponente (r̈) und der Zentripetalbeschleunigung (−r φ̇2 ).
Setzt man diese Beschleunigungen nun mit der Gravitationskraft (−M/r 2 ) gleich, so
erhält man die Gleichung
M
r̈ − rϕ̇2 = − 2 .
(4.10)
r
Die Differentialgleichung für die Winkelkomponente ϕ ergibt sich ebenfalls einfach.
Die zeitliche Ableitung der Gleichung r 2 ϕ̇ = c, welche die Erhaltung des Drehimpulses ausdrückt, ergibt
2ṙϕ̇ + rϕ̈ = 0.
(4.11)
(4.10) und (4.11) entsprechen damit den Gleichungen in (4.9). Mit den neuen Variablen
ω = ϕ̇ und ρ = ṙ ergibt sich dann das folgende System von Differentialgleichungen.
ω̇ = −2ρω/r
ϕ̇ = ω
= φ1 (r, ω, ρ)
ρ̇ = rω 2 − M/r 2 = φ0 (r, ω MSonne )
ṙ = ρ
(4.12)
Der Winkel und Abstand zu einem späteren Zeitpunkt t lassen sich nun voraussagen.
ω(t) = ω(t0 ) + (t − t0 )φ1 (r, ω, ρ)
(t − t0 )2
φ1 (r, ω, ρ)
2
ρ(t) = ρ(t0 ) + (t − t0 )φ0 (r, ω MSonne )
ϕ(t) = ϕ(t0 ) + (t − t0 )ω(t0 ) +
r(t) = r(t0 ) + (t − t0 )ρ(t0 ) +
(4.13)
(t − t0 )2
φ0 (r, ω MSonne )
2
Zuerst wird eine Bahn mit den selben Anfangswerten wie im vorigen Kapitel berechnet.
Diese errechnete Planetenbahn entspricht der exakten Bahn. Für eine Kreisbahn gilt
Zentripetalkraft = Gravitationskraft. Wenn man diese Formel umformt und in φ 0 aus
den Gleichungen 4.12 einsetzt, so gilt φ0 = 0, und zwar permanent. ρ und r verbleiben
also permanent in ihren Startwerten. Wegen ρ = 0 ist auch φ1 = 0. Also ändert sich
auch ω nicht und es gilt ϕ = ωt. Das beschreibt den exakten Kreis.
4.5 Ellipsenbahnen
Die kreisförmige Planetenbahn ist ein Spezialfall. Im Allgemeinen bewegen sich Planeten auf Ellipsenbahnen um ihre Sonne. Abbildung 4.4 zeigt einige solcher Bahnen
mit einer Schrittweite 0.01. Der Startpunkt ist der gleiche wie zuvor. Nur die Geschwindigkeit wurde heruntergesetzt. Bei der Kreisbahn betrug sie v = 10. Je kleiner die Anfangsgeschwindigkeit, desto kleiner ist auch der minimale Abstand des Planeten von
KAPITEL 4. PLANETENBAHNEN
40
5
Kreis
v0 = 9
v0 = 8
v0 = 7
4
3
2
1
0
u
−1
−2
−3
−4
−5
−6
−4
−2
0
2
4
6
8
Abbildung 4.4: Vergleich verschiedener Vorbeiflüge, Einschrittverfahren
der Sonne. Wichtiger ist jedoch, dass im gleichen Zuge die Näherungskurve immer
schlechter wird. Kommt der Planet bei v = 8 nach einer Umkreisung fast wieder an
seinem Startpunkt an, so wird der Fehler bei geringeren Startgeschwindigkeiten bereits
nach einer Umkreisung immens. Der Grund dafür ist, dass kleine Fehler der Planetenbahn in der Nähe der Sonne stärkere Auswirkungen haben als in großer Entfernung.
Um zu erfassen, warum das so ist, wird die Beschleunigung a = F/m betrachtet. Sie
ist die Größe, die von außen (von der Sonne) auf den Planeten einwirkt. Ein Maß für
den Einfluss kleiner Fehler des Abstands ist die Ableitung der Beschleunigung nach
dem Abstand da/dr. Sie drückt aus, welche Auswirkungen kleine Änderungen des
Abstands auf die Beschleunigung haben und ist eine Funktion vom Typ 1/r 3 . Das bedeutet, dass sich bei halbem Abstand kleine Fehler 8-fach auswirken. In Abschnitt 5.1
und 5.2 werden diese Effekte ausführlich behandelt.
Die Planetenbahn neigen dazu, eine Schnecke nach außen zu vollziehen. Dieser Trend
wird also noch verstärkt, und zwar um so mehr, desto näher der Planet an der Sonne vorbei fliegt. Sicherlich kann man diesem Problem begegnen, indem man die Schrittweite
insgesamt verkleinert. Zuerst wird jedoch ein Verfahren höherer Ordnung entwickelt.
4.6 Verfahren 2. Ordnung
Mit den Polarkoordinaten können wir relativ einfach das Verfahren anwenden, das in
Kapitel 3.7 für das Federpendel angewandt wurde. Indem Ableitungen der Funktionen
φ0 und φ1 gebildet werden, kann pro Ableitung die Ordnung des Verfahrens um 1
4.6. VERFAHREN 2. ORDNUNG
41
erhöht werden.
d
6ρ2 ω + 2MSonne ω/r − 2r 2 ω 3
φ1 =
dt
r2
d
2ρMSonne
φ0 =
− 3ρω 2
dt
r3
Der Rechenaufwand steigt dadurch um ca. 200%. Das heißt, es sind pro Schritt wesentlich mehr Rechenschritte durchzuführen. Andererseits lohnt sich der Aufwand.
Um z.B. bei einer Anfangsgeschwindigkeit v = 8 eine auch nur annähernd genauso
gute Bahn zu erhalten, benötigt man die 10-fache Anzahl an Schritten. Obwohl das
2-Schritt-Verfahren einen großen Fortschritt darstellt, sind Bahnen mit Startgeschwindigkeiten von v = 5 bereits mit bloßem Auge erneut fehlerhaft. Hier ist ein Verfahren
notwendig, das dem speziellen Problem der großen Fehler in der Nähe der Sonne entgegen tritt. Deshalb wird nun ein Verfahren mit Schrittweitensteuerung vorgestellt. Solch
exakt
v0 = 8
v0 = 5
4
2
0
u
−2
−4
−6
−4
−2
0
2
4
6
Abbildung 4.5: Vergleich verschiedener Vorbeiflüge, Zweischrittverfahren
eine Vorgehensweise wurde bereits im Kapitel 2.6 über Integration verwendet. Im Gegensatz zur Integration ist beim Lösen von Differentialgleichungen die Funktion bzw.
die Bahn nicht bekannt. Also müssen alle Entscheidungen über die Länge des nächsten
Schritts aus bisherigen Daten vorausgesagt werden. Der neue Algorithmus weist im
Vergleich zum bisherigen Algorithmus nur den Unterschied auf, dass vor jedem Schritt
die neue Schrittweite berechnet wird. Als Maß dient dabei ein Bruchteil
des maximale
2
/M
Abstand des Planeten von der Sonne. Er ergibt sich als rmax = h1−
. In allen bisherigen Beispielen war das gerade der Anfangsabstand. Dann wird zuerst die folgende
Funktion verwendet.
r(t0 )
t(r(t0 ), rmax ) − t0 = c
rmax
Für die Konstante kann eine Schrittweite in der Dimension der bisher benutzten Schrittweite herangezogen werden. Die Schrittweite ist dann in der Nähe des am weitesten
KAPITEL 4. PLANETENBAHNEN
42
entfernten Punktes maximal (ungefähr c) und in der Nähe der Sonne minimal. Die
Funktion zur Steuerung der Schrittweite ist vom Typ 1/r, da es nicht sinnvoll ist, in
der Nähe der Sonne genauer zu rechnen als anderswo. Da ein Verfahren 2. Ordnung
benutzt wird, verhält sich der Fehler wie 1/r 2 und gleicht somit die erhöhte Fehleranfälligkeit in der Nähe der Sonne aus. Vergleicht man eine Berechnung mit Schrittweitensteuerung und der Konstanten c mit einer Berechnung mit Schrittweite c, so fällt
auf, dass die erste deutlich mehr Schritte braucht, wenn der Planet in die Nähe der Sonne kommt. Soll mit der alten Methode jedoch eine vergleichbare Genauigkeit erreicht
werden, so werden insgesamt mehr Schritte benötigt. Tabelle 4.1 zeigt Ergebnisse, die
Schritte
333
665
1330
2659
5317
200
400
800
1600
3200
x0
2.22993
2.31091
2.33272
2.33839
2.33983
-66.44056
5.22725
2.74027
2.39211
2.34731
x1
2.02602
1.91963
1.89382
1.88743
1.88583
-13.67878
0.77277
1.81527
1.87284
1.88237
Fehler x0
4.72E-02
1.26E-02
3.24E-03
8.26E-04
2.08E-04
2.94E+01
1.23E+00
1.71E-01
2.21E-02
2.99E-03
Fehler x1
7.46E-02
1.82E-02
4.52E-03
1.13E-03
2.81E-04
8.26E+00
5.90E-01
3.71E-02
6.61E-03
1.55E-03
Tabelle 4.1: Vergleich mit und ohne Schrittweitensteuerung
mit (im oberen Bereich) und ohne (im unteren Bereich) Schrittweitensteuerung erzielt
wurden. Vergleicht man z.B. die 3. und die 10. Zeile, so wird klar, dass für etwa die
gleiche Genauigkeit beim Verfahren mit Schrittweitensteuerung weniger als die Hälfte
der Schritte benötigt werden. Eine deutlich bessere aber auch aufwendigere Schrittweitensteuerung wird in Abschnitt 5.1 beschrieben.
4.7 Verfahren höherer Ordnung
Möchte man Verfahren höherer Ordnung, so leitet man einfach die bislang verwendeten Funktionen weiter ab. In diesem Fall wäre das sogar eine mögliche Alternative,
da die Ableitungen noch überschaubar sind. Betrachtet man das Problem in kartesischen Koordinaten, so wird klar, warum eine 3. , 4. und 5. Ableitung einen zu großen
Entwicklungs- und Rechenaufwand darstellen können. Davon abgesehen müssen die
Ableitungen analytisch und nicht numerisch gewonnen werden. Ein numerisches Programm wie z.B. Matlab ist von sich aus nicht dazu fähig. Die Verfahren von Heun und
Kollatz zeigen, wie man die Probleme umgehen kann und bilden eine Vorstufe zum
Verfahren von Runge und Kutta.
4.7.1
Theorie
Um solch ein Verfahren entwickeln zu können, muss die Theorie aus Kapitel 3.6 (S.
29) etwas verallgemeinert werden. Mit den gleichen Bezeichnungen ist die Taylorentwicklung einer Differentialgleichung z 0 (t) = f (t, z(t))
z(x + h) = z(x) + hz 0 (x) +
h2 00
z (x) + . . .
2
4.7. VERFAHREN HÖHERER ORDNUNG
43
Nun ist aber wegen z(x) = y und z 0 (t) = f (t, z(t)).
d
f (t, z(t))|t=x = fx (t, z(t))|t=x + fy (t, z(t))z 0 (t)|t=x
dx
= fx (x, y) + fy (x, y)f (x, y),
z 00 (x) =
z (3) (x) = fxx (x, y) + 2fxy (x, y)f (x, y) + fyy (x, y)f (x, y)2 + fy (x, y)z 00 (x)
..
.
und daher
h 00
z (x) + . . .
2!
h
= f (x, y) + [fx (x, y) + fy (x, y)f (x, y)] + . . .
2
∆(x, y; h) = z 0 (x) +
(4.14)
Nun gilt es erneut, eine Funktion Φ(x, y; h) zu finden, so dass ∆(x, y; h) − Φ(x, y; h)
von möglichst großer Ordnung ist. Für den Ansatz
Φ(x, y; h) := a1 f (x, y) + a2 f (x + p1 h, y + p2 hf (x, y)) ,
(4.15)
erhält man eine Taylorentwicklung von Φ.
Φ(x, y; h) = (a1 + a2 )f (x, y) + a2 h[p1 fx (x, y) + p2 fy (x, y)f (x, y)] + O(h2 ) (4.16)
Der Vergleich von (4.14) und (4.16) ergibt die Bedingungen
a1 + a2 = 1,
a 2 p1 =
1
,
2
a 2 p2 =
1
2
für die noch zu wählenden Konstanten des Ansatzes. Mit den Werten
a1 =
1
,
2
a2 =
1
,
2
p1 = 1,
p2 = 1
erhält man das Verfahren von Heun, das ein Verfahren 2. Ordnung ist. Eine andere
Lösung ist
1
1
(4.17)
a1 = 0, a2 = 1, p1 = , p2 =
2
2
die zu dem modifizierten Euler-Verfahren von Collatz führen. Diese Art von 1-SchrittVerfahren hat somit den großen Vorteil, dass keine Ableitungen explizit ausgerechnet
werden müssen. Außerdem ist der Rechenaufwand im Allgemeinen sehr klein. Bei
beiden Verfahren muss im Wesentlichen nur die Funktion f (x, y) zwei mal ausgewertet
werden.
Beispiel 4.1
Das modifizierte Euler-Verfahren nach (4.17) wird anhand eines einfachen Beispiels
erläutert. Die Differentialgleichung
y 0 = f (x, y) = x −
2x
y
√
mit den Anfangswerte y(0) = 1 hat die exakte Lösung 2x + 1. In Tabelle 4.2 wird
eine Rechnung mit der Schrittweite h = 0.1 vorgeführt. Der Rechenaufwand besteht
KAPITEL 4. PLANETENBAHNEN
44
x
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
y
1.00000
1.09548
1.18330
1.26506
1.34186
1.41452
1.48364
1.54970
1.61309
1.67411
1.73301
f (x, y)
1.00000
0.91291
0.84526
0.79077
0.74567
0.70756
0.67482
0.64630
0.62120
0.59891
0.57895
x + h2
0.05000
0.15000
0.25000
0.35000
0.45000
0.55000
0.65000
0.75000
0.85000
0.95000
1.05000
y + h2 f (x, y)
1.05000
1.14112
1.22556
1.30460
1.37914
1.44989
1.51738
1.58202
1.64415
1.70405
1.76196
Φ(x, y; h)
0.95476
0.87822
0.81759
0.76803
0.72656
0.69122
0.66064
0.63386
0.61018
0.58906
0.57011
y (exakt)
1.00000
1.09545
1.18322
1.26491
1.34164
1.41421
1.48324
1.54919
1.61245
1.67332
1.73205
Tabelle 4.2: Schema für das modifizierte Euler-Verfahren
x
0
0.01
0.02
0.04
0.08
mod. Euler-Verfahren
y(2)
Fehler
Verhältnis
2.236068
0
2.236126 2.611E-05
2.236303 1.050E-04
4.0236
2.237018 4.250E-04
4.0454
2.239948 1.735E-03
4.0835
y(2)
2.236068
2.235821
2.235079
2.232096
2.220124
Ableitung
Fehler
0
1.103E-04
4.425E-04
1.776E-03
7.130E-03
Tabelle 4.3: Ergebnis eines modifizierten Euler-Verfahren
Verhältnis
4.0096
4.0150
4.0138
4.8. RUNGE-KUTTA-VERFAHREN N -TER ORDNUNG
45
aus 7 Rechenoperationen und dem zweimaligen Auswerten der Funktion f (x, y). Bei
einem Verfahren 2. Ordnung, wie es im Abschnitt 4.6 (S.40) beschrieben wird, müssen neben vergleichbaren Rechenoperationen einmal f (x, y) und einmal f 0 (x, y) ausgewertet werden. Dabei ist die Ableitung im Normalfall komplexer und langwieriger
auszuwerten als die Stammfunktion. Von der Tatsache, dass die Ableitung erstmal bestimmt werden muss, mal ganz abgesehen.
Verfahren wie das von Heun und das modifizierte Euler-Verfahren stellen somit bei
gleicher Ordnung einen deutlich geringeren Aufwand dar.
4.8 Das Runge-Kutta-Verfahren für Differentialgleichungen n-ter Ordnung
Das Runge-Kutta-Verfahren ist ein viel benutztes genaues Integrationsverfahren. In den
folgenden Kapiteln werden die allgemeinen Formeln hergeleitet.
4.8.1
Der allgemeine Ansatz
Es sei eine Differentialgleichung n-ter Ordnung vorgelegt
y (n) = f x, y, y 0 , y 00 , . . . , y (n−1) ,
(4.18)
und es sei die Lösungsfunktion y(x) gesucht, die an der Stelle x = x0 die vorgegebenen Anfangswerte
(ν)
y0
= y (ν) (x0 ),
(ν = 0, 1, 2, . . . , n − 1)
(4.19)
annimmt. Es sollen Näherungswerte für y und die Ableitungen y (ν) an einer um die
Schrittweite h entfernten Stelle x1 = x0 + h aufgestellt werden.
Ganz grobe Näherungen würde man aus den Anfangswerten mit Hilfe der nach
(n−1)
(ν)
dem Gliede y0
abgebrochenen Taylor-Entwicklung erhalten, und zwar für y1 den
Wert
(ν)
y0 +
h (ν+1) h2 (ν+2)
hn−ν−1
(n−1)
y0
+ y0
+ ··· +
y
= Tν (1),
1!
2!
(n − ν − 1)! 0
wenn die Abkürzung Tν etwas allgemeiner eingeführt wird als
(ν)
Tν (α) = y0 +
αh (ν+1) (αh)2 (ν+2)
y
+
y
+ ···
1! 0
2! 0
(αh)n−ν−1 (n−1)
+
y
(n − ν − 1)! 0
(4.20)
(ν = 0, 1, 2, . . . , n − 1).
Das entspricht dem Euler-Verfahren für den Fall f 0 = f (x, y) wie es in Beispiel 4.1 erläutert wurde. Um bessere Näherungen zu erhalten, werden zu den Taylor-Ausdrücken
noch Korrekturen k (ν) hinzugefügt, d.h., es werden Größen k, k 0 , k 00 , . . . , k (n−1) aufgestellt derart, dass (mit einem sich später als zweckmäßig erweisenden Faktor ν!h −ν )
(ν)
y1
= Tν (1) +
ν! (ν)
k
hν
(ν = 0, 1, . . . , n − 1)
(4.21)
KAPITEL 4. PLANETENBAHNEN
46
ein möglichst gute Näherung für die ν-te Ableitung y (ν) (x1 ) darstellt.
Es werde zunächst ein allgemeiner Ansatz beschrieben, dem sich die meisten bekannten Näherungsverfahren als Spezialfälle unterordnen.
Die Zuwachse k (ν) werden durch Linearkombinationen aus gewissen Hilfsgrößen
k1 , k2 , . . . , kr gebildet
k (ν) =
r
X
γ ν % k% ,
%=1
(ν = 0, 1, . . . , n − 1)
(4.22)
wobei man die k% als Funktionswerte f an geeigneten Zwischenstellen bestimmt:
hn
f (x0 , T0 (0), T1 (0), . . . , Tn−1 (0)) ,
n!
hn
k2 =
f (x0 + α1 h, T0 (α1 ) + a10 k1 , T1 (α1 ) + a11 k1 , . . . , Tn−1 (α1 ) + a1,n−1 k1 ) ,
n!
n
h
f (x0 + α2 h, T0 (α2 ) + a20 k1 + b20 k2 , . . . , Tn−1 (α2 ) + a2,n−1 k1 + b2,n−1 k2 ) .
k3 =
n!
..
.
(4.23)
k1 =
Durch Einsetzen der Taylor-Entwicklung Tν (α% ) erreicht man, dass man sich mit den
Werten
x = x0 + α% h;
y = T0 (α% );
y 0 = T1 (α% ); . . . y (n−1) = Tn−1 (α% )
in der Nähe der richtigen Lösungskurve befinden wird. Die noch verfügbaren Konstanten α% , αν % , bν % , . . . , γν % sind nun so zu bestimmen, dass die Taylor-Entwicklungen
(ν)
der Werte y1 bis auf Glieder möglichst hoher Ordnung mit den Taylor-Entwicklungen
(ν)
(ν)
von y1 (x1 ) übereinstimmen; ausführlicher: Die Taylor-Entwicklung von y1 (x1 )
lautet mit Benutzung der Abkürzung (4.21)
hn−ν n
hn−ν+1
(n+1)
y0 +
y
+ ···
(n − ν)!
(n − ν + 1)! 0
#
" (n)
(n+1)
n hn y 0
n + 1 hn+1 y0
ν!
+
+ ···
= Tν (1) + ν
ν
ν
h
n!
(n + 1)!
y (ν) (x1 ) = Tν (1) +
(4.24)
Die Korrekturgrößen k (ν) sind nun so zu wählen, dass bei ihrer Taylor-Entwicklung die
Ausdrücke (4.21) bis (4.24) bis zu Gliedern möglichst hoher Potenz übereinstimmen.
4.8.2
Der spezielle Runge-Kutta-Ansatz
Im Folgenden soll ein spezieller Ansatz, der sich wegen einfacher Koeffizienten und eines symmetrischen Aufbaus durchgesetzt hat, durchgeführt werden. Hierbei wurde der
Grundgedanke von C. Runge für Gleichungen 1. Ordnung von Heun und Kutta genauer
ausgeführt, dann von Nyström auf Gleichungen 2. Ordnung übertragen und schließlich
von Zurmühl zuerst auf Gleichungen 3. Ordnung und dann auf Gleichungen n-ter Ordnung erweitert [3].
Es werden bei diesem Ansatz vier Werte k1 , k2 , k3 , k4 gebildet und die Abszissen
x0 , x0 + h2 , x0 + h mit α1 = α2 = 1/2 zugrunde gelegt.
4.8. RUNGE-KUTTA-VERFAHREN N -TER ORDNUNG
47
Über die Konstanten aν % , bν % , . . . wird in der Weise verfügt, dass die Glieder sich an
die Taylor-Entwicklung anschließen, und zwar
hn
f [x0 , T0 (0), T1 (0), . . . , Tn−1 (0)] ,
n! "
h
k1
hn
n 1!k1
n
1
1
1
2!k1
f x0 + , T0
+ n , T1
+
,
T
+
,...,
k2 =
2
n−1
n−2
n!
2
2
2
2
h
2
h2
1 2
2 2
#
1
(n − 2)!k1
n
1
n!k1
, Tn−1
Tn−2
+
+ n−1 ,
n−2
2
4hn−2
2
2h
"
1
1
1
hn
h
2!k1
n 1!k1
n
k1
k3 =
f x0 + , T0
,
T
,...,
+ n , T1
+
+
2
n−1
n−2
1 2
2 2
n!
2
2
2
2
h
2
h2
#
1
n
n!k2
1
(n − 2)!k1
+
, Tn−1
+ n−1 ,
Tn−2
2
4hn−2
2
2h
n−2
"
hn
n 1!k3
n 2!k3
k4 =
f x0 + h, T0 (1) + k3 , T1 (1) +
, T2 (1) +
,...,
n!
1 h
2 h2
#
n!k3
n
(n − 2)!k3
, Tn−1 (1) + n−1 .
Tn−2 (1) +
hn−2
h
n−2
k1 =
(4.25)
Es unterscheiden sich also k2 und k3 nur dadurch, dass das letzte Argument in f ein
anderes ist; hängt f nicht explizit von y (n−1) ab, so ist k2 = k3 .
4.8.3
Aufstellen der Runge-Kutta-Formeln
(n−1)
Nun werden die Größen k1 bis k4 in Taylorsche Reihen an der Ausgangsstelle x0 , y0 , y00 , . . . , yo
n
entwickelt. k1 ist unmittelbar hn! f . Die Entwicklung der weiteren kν aber ist eine mühsame Rechnung, weil sich im Allgemeinen alle n + 1 Argumente von f ändern; es ist
ja z.B.
2
3
n!
h
0 h
00 h
000 h
k
=
f
x
+
,
y
+
y
+
y
+
y
+ ···
2
0
0
0
0
0
hn
2
2
4 · 2!
8 · 3!
hn
, y 0 + y000 + · · · , · · · .
+f n
2 · n! 0
In der Entwicklung der rechten Seite werden nur die Glieder bis h3 einschließlich berücksichtigt. Für allgemeines n ergeben sich die Taylor-Entwicklungen für die k 1 bis
k4 (siehe [3][S. 63]). Aus den Werten kν werden nun durch Linearkombination nach
(4.22) die Zuwachse k (0) , k (1) , . . . , k (n−1) gebildet, mit denen sich nach (4.21) die
neuen Werte von y und den Ableitungen y (ν) berechnen.
k
(ν)
=
n+2
1
(n − ν)2 k1 + 2(n − ν)(k2 + k2 ) + (2 − (n − ν)) k4 .
ν
(n + 1 = (n + 2)
(4.26)
KAPITEL 4. PLANETENBAHNEN
48
Man erhält mit diesen Zuwachsen eine Übereinstimmung der Taylor-Entwicklung bei
y, y 0 h, . . . , y (n−2)
y
(n−1)
h(n−2)
bis zu Gliedern mit h(n+2) einschließlich,
(n − 2) !
h(n−1)
bis zu Gliedern mit h(n+3) einschließlich,
(n − 1)!
(4.27)
Das Runge-Kutta-Verfahren ist somit für die Ordinate y für n > 1 ein Verfahren (n + 2)ter Ordnung und für n = 1 ein Verfahren vierter Ordnung.
4.8.4
Praktische Durchführung des Runge-Kutta-Verfahrens
Da in dieser Arbeit vornehmlich Differentialgleichungen 2-ter Ordnung betrachtet werden, beziehen sich die folgenden Angaben auf den Fall n = 2.
Es liegt also nach (4.18) ein Differentialgleichung
y 00 = f (x, y, y 0 )
(4.28)
mit den Anfangswerten
y(x0 ) := u0,0
y 0 (x0 ) = u1,0
und
(4.29)
vor. Die Taylor-Ausdrücke ergeben sich dann übersichtlich zu
t0 (α) = u0 + αhu1
(4.30)
t1 (α) = u1 .
Dann wird aus (4.25)
k1 =
k2 =
=
k3 =
=
k4 =
h2
f (x0 , u0 , u1 )
2 2
h
h
f x0 + , t0 (1/2) +
2
2
h2
h
f x0 + , t0 (1/2) +
2
2
2
h
h
f x0 + , t0 (1/2) +
2
2
2
h
h
f x0 + , t0 (1/2) +
2
2
2
h
f (x0 + h, t0 (1) + k3 ,
2
k1
,
22
k1
,
4
k1
,
22
k1
,
4
k1 2
2 1
t1 (1/2) + k1
k2 2
t1 (1/2) +
2 1
t1 (1/2) + k2
t1 (1/2) +
(4.31)
t1 (1) + 2k3 )
Die neuen Werte u0,1 und u1,1 findet man dann mit
u0,1 = t0 (1) + k
und
u1,1 = t1 (1) +
k (1)
h
(4.32)
Das Verfahren erfolgt demnach in folgenden Schritten:
1. Die Taylor-Ausdrücke tν (1/2), tν (1), ν = 1, 2 werden nach (4.30) berechnet.
2. Nach (4.31) werden mit f die Werte k1 , k2 , k3 , k4 berechnet.
4.8. RUNGE-KUTTA-VERFAHREN N -TER ORDNUNG
49
3. Nach (4.32) werden dann die neuen Werte vν,1 berechnet, welche für den nächsten Schritt als neue Anfangswerte benutzt werden.
Beispiel 4.2 (Das Federpendel)
Am Beispiel des Federpendels können die soeben hergeleiteten Formel getestet werden. Die Differentialgleichung ist dann
ẍ(t) = −
k
x
m
(4.33)
Mit k/m = 4, den Startwerten ẋ0 = 0, x0 = 5 und der Schrittweite h = 0.1 ergibt sich
die in Tabelle 4.4 aufgeführte Rechnung. Da (4.33) nicht von ẋ abhängt, sind k 2 und
k3 gleich.
t
0
0.1
0.2
0.3
0.4
u0
5.00000
4.97500
4.97513
4.90050
4.90033
4.77650
4.77711
4.60612
4.60530
4.38756
4.38865
4.12810
4.12666
3.82369
3.82521
3.48549
3.48349
u1
0.00000
-1.98672
-3.89429
-5.64668
-7.17401
t0 (1/2)
t0 (1)
t1 (1/2)
t1 (1)
t0 (1/2)
t0 (1)
t1 (1/2)
t1 (1)
t0 (1/2)
t0 (1)
t1 (1/2)
t1 (1)
t0 (1/2)
t0 (1)
t1 (1/2)
t1 (1)
5.00000
5.00000
0.00000
0.00000
4.80100
4.70166
-1.98672
-1.98672
4.41059
4.21587
-3.89429
-3.89429
3.84433
3.56199
-5.64668
-5.64668
3.12479
k1 bis k4
-0.10000
-0.09950
-0.09950
-0.09801
-0.09801
-0.09553
-0.09554
-0.09212
-0.09211
-0.08775
-0.08777
-0.08256
-0.08253
-0.07647
-0.07650
-0.06971
-0.06967
k und k 0
-0.09967
-0.19867
-0.09636
-0.19076
-0.08921
-0.17524
-0.07850
-0.15273
-0.06467
Tabelle 4.4: Beispielrechnung zum Runge-Kutta-Verfahren
Tabelle 4.5 zeigt die Ergebnisse einer Approximation von x(0.8) und ẋ(0.8) mit verschiedenen Schrittweiten. Wie erwartet schrumpft der Fehler auf ca. 214 mit der Halbierung der Schrittweite.
h
0
0.05
0.1
0.2
0.4
x(0.8)
-0.1459976
-0.1459951
-0.1459577
-0.1453660
-0.1364295
ẋ(0.8)
-9.9957360
-9.9957411
-9.9958133
-9.9968574
-10.0109926
Fehler
1.7E-05
2.7E-04
4.3E-03
6.6E-02
5.1E-07
7.7E-06
1.1E-04
1.5E-03
Verhältnis
15.97 15.21
15.82 14.51
15.15 13.60
Tabelle 4.5: Runge-Kutta-Verfahren mit verschiedenen Schrittweiten
KAPITEL 4. PLANETENBAHNEN
50
4.8.5
Vorteile gegenüber MATLAB
MATLAB ist ein kommerzielles Produkt, welches seine Vorteile besonders im Bereich
„rechnen mit Vektoren und Matrizen“ hat. Unter anderem bringt MATLAB eine Löser
für Differentialgleichungen mit, so auch ein Runge-Kutta-Verfahren. Dieses Verfahren
kann jedes System von Differentialgleichungen lösen. Es hat also den Vorteil, dass es
allgemein einsetzbar ist. Im Vergleich zu dem hier geschilderten und benutzten Verfahren hat es aber auch Nachteile:
1. Wie man in (4.31) und auch in Tabelle 4.4 sehen kann, ist es nicht nötig den
Zuwachs k3 zu berechnen, da k2 = k3 wenn f (x, y, y 0 ) nicht von y 0 abhängt.
2. Es müssen keine Funktionen f (y) für die Geschwindigkeiten, also für y 0 , ausgewertet werden, wie das der Fall ist, wenn man eine Differentialgleichung n-ter
Ordnung auf n Differentialgleichungen der Ordnung 1 zurückführt.
Der 2. Grund fällt allerdings kaum ins Gewicht, da der zusätzliche Aufwand nur einige
Zuweisungen und keine weiteren Rechnungen zur Folge hat.
Kapitel 5
Erweiterungen
5.1 Schrittweitensteuerung
Zu einem Anfangswertproblem y 0 = f (x, y) mit den Anfangswerten x0 und
y(x0 ) = y0 soll der Wert y(x) zu einem Wert x 6= x0 berechnet werden. Errechnet man
den gesuchten Wert in einem einzigen Schritt mit der Schrittweite h = x−x0 , führt das
in der Regel zu einem großen und unvertretbaren Diskretisierungsfehler. Gewöhnlich
wird man daher, wie bei der Integration (Abschnitt 2.1.1, S. 14), passende Zwischenpunkte xi mit i = 1, . . . , k − 1 einführen, für die gilt x0 < x1 < . . . < xk = x . Die
i-te Schrittweite hat dann also die Länge hi = xi − xi−1 . Wie in Abschnitt 3.6 (S.
29) bereits beschrieben, hängt der lokale Diskretisierungsfehler stark von der Schrittweite eines Schrittes ab. Über die Schrittweite h lässt sich also der Fehler steuern. Je
kleiner die Schrittweite desto kleiner der Fehler. Dafür steigt dann allerdings der Rechenaufwand. Möchte man ein Ergebnis mit einer bestimmten Genauigkeit, so muss
die Schrittweite also von Schritt zu Schritt klein genug gewählt werden. Sie sollte aber
auch nicht zu klein gewählt werden um den Rechenaufwand nicht zu groß werden zu
lasen.
Das Problem ist also: Bestimme zu gegebenem x0 , y0 eine möglichst große Schrittweite h, so dass der Diskretisierungsfehler ε(x0 + h; h) nach einem Schritt mit dieser
Schrittweite noch unterhalb einer gewissen Schranke εmax bleibt.
5.1.1
Die Konvergenz von Einschrittverfahren
Wie im Abschnitt 3.6 (S. 29) beschrieben, verhält sich bei einem Verfahren der Ordnung p der lokale Diskretisierungsfehler wie τ (x, y; h) = O(hp ). Dieser Fehler gilt
nur für einen einzelnen Schritt und ist somit lokal. In den benutzten Verfahren werden
jedoch viele einzelne Schritte aneinandergereiht. Dieser Abschnitt befasst sich nun mit
dem globalen Diskretisierungsfehler. Gegeben ist das Anfangswertproblem
y 0 = f (x, y)
y(x0 ) = y0
(5.1)
mit der exakten Lösung y(x). Es soll der Werte y(x) berechnet werden. Das Intervall
0
(x−x0 ) wird dazu in 1, 2, . . . gleich lange Unterintervall der Länge h = hn = x−x
n = 1, 2, . . .
n ,
unterteilt. Wenn man nun mit η(x, h) den numerisch berechneten Näherungswert für
y(x) mit der Schrittweite h bezeichnet, so gilt für den Fehler
η(x; h) − y(x) = εp (x)hp + εp+1 hp+1 + . . . .
51
(5.2)
KAPITEL 5. ERWEITERUNGEN
52
Ein Beweis dafür findet man in [16, S.122]. (5.2) gilt unter gewissen Einschränkungen
für alle allgemeinen Einschrittverfahren p-ter Ordnung, insbesondere auch alle hier
verwendeten Verfahren.
Derartige asymptotische Gesetze sind aus zweierlei Gründen praktisch bedeutsam.
Zum einen rechtfertigen sie die Anwendung von Extrapolationsverfahren. Diese
Verfahren werden hier jedoch nicht weiter erläutert (siehe dazu [16, S.166]).
Die andere wichtige Bedeutung liegt darin, den globalen Diskretisierungfehler ε(x; h)
abzuschätzen. Das Verfahren p-ter Ordnung habe z.B. eine asymptotische Entwicklung
der Form
ε(x; h) = η(x; h) − y(x) = hp εp (x) + O(hp+1 ).
(5.3)
Hat man mit der Schrittweite h den Näherungswert η(x; h) gefunden, so berechne man
anschließend mit einer anderen Schrittweite, z.B. mit der Schrittweite h2 , für dasselbe
x den Näherungswert η x; h2 . Für genügend kleines h (und εp (x) 6= 0) ist dann in 1.
Näherung
.
η(x; h) − y(x) = εp (x)hp
p
h
h
.
.
− y(x) = εp (x)
η x;
2
2
(5.4)
(5.5)
Subtraktion der zweiten Gleichung von der ersten ergibt
h .
hp
η(x − h) − η x;
= εp (x) (2p − 1)
2
2
p
h
h
. η(x; h) − η 2
εp (x)
=
2
2p − 1
und man erhält durch Einsetzen in (5.5)
h
η x;
2
. η(x; h) − η
− y(x) =
2p − 1
h
2
Für das Verfahren von Runge-Kutta ist p = 4 und man bekommt die Formel
h
h
. η(x; h) − η 2
.
η x;
− y(x) =
2
15
5.1.2
(5.6)
(5.7)
Schrittweitensteuerung in der Praxis
Zuerst muss eine Genauigkeit εmax gewählt werden. Diese Schranke für den Fehler
sollte man nicht kleiner als ein Vielfaches der Maschinengenauigkeit eps wählen. Dann
gilt εmax ≥ K · eps, wobei K eine Schranke für die Lösung y(x) in dem in Frage
kommenden Bereich ist
K ≈ max {|~y (x)| : x ∈ [x0 , x0 + h]} .
(5.8)
Betrachtet man z.B. Abbildung 4.5 auf Seite 41, so kann man für dieses Problem
K = 100 wählen. Der Körper entfernt sich zwar nie weiter als 5 von der Sonne, die
Geschwindigkeit beginnt jedoch mit v (je nach Bahn) und wächst dann um so weiter
an, je näher der Körper der Sonne kommt. Je geringer die Startgeschwindigkeit, also
je näher der Planet an der Sonne vorbeifliegt, desto geringer darf man Ansprüche an
5.1. SCHRITTWEITENSTEUERUNG
53
die Genauigkeit stellen. Dieses Problem wird in Abschnitt 5.2 noch genauer behandelt.
Rechnet man unter Excel mit doppelter Genauigkeit, so hat man eine Maschinengenauigkeit von eps ≈ 10−14 . Eine εmax = K · eps entsprechende Wahl von h garantiert
dann, dass die gefundene Näherungslösung η(x0 + h; h) im Rahmen der Maschinengenauigkeit mit der exakten Lösung y(x0 + h) übereinstimmt. Eine solche Schrittweite
h = h(εmax ) kann mit den Methoden aus dem vorhergehenden Kapitel näherungsweise
gewonnen werden:
Bei einem Verfahren der Ordnung p gilt nach 5.3 in 1. Näherung
.
ε(x; h) = εp (x)hp .
(5.9)
Nun ist εp (x0 ) = 0, also in 1. Näherung
.
εp (x) = (x − x0 )ε0p (x0 ).
.
Es ist damit ε(x0 + h; h) = ε falls
.
. ε = |εp (x0 + h)hp | = hp+1 ε0p (x0 ) .
(5.10)
(5.11)
Daraus kann man h berechnen, wenn man ε0p (x0 ) kennt. Einen Näherungswert für
ε0p (x0 ) kann man aber mittels (5.6) gewinnen. Benutzt man zunächst die Schrittweite
H um η(x0 + H; H) und η x0 + H; H
2 zu berechnen, so gilt
H . η(x0 + H; H) − η x0 + H; H
2
=
.
(5.12)
ε x0 + H;
2
2p − 1
Andererseits ist wegen (5.9) und (5.10)
H2 . 0
Hp
H .
= εp (x0 + H)
= εp (x0 )H
ε x0 + H;
.
2
2
2
Also folgt aus (5.12) der Schätzwert
2p
1
H
.
0
εp (x0 ) = p+1 p
η(x0 + H; H) − η x0 + H;
.
H
2 −1
2
(5.11) liefert daher die Formel
s
H . p+1 2p η(xo + H; H) − η x0 + H; H2
=
,
h
2p − 1
εmax
(5.13)
(5.14)
(5.15)
die folgendermaßen angewendet wird.
Schritt 1: Wahl einer Schrittweite H.
Schritt 2: Berechnung der Werte η(x0 + H; H) und η(x0 + H; H2 .
Schritt 3: Berechnung von h nach (5.15).
H
Falls H
viel größer als das vorgeh 2 ist wegen (5.12) der Fehler ε x0 + H; 2
schriebene εmax . Es ist daher zweckmäßig, H zu reduzieren.
Dazu ersetze man H durch 2h und wiederhole die Schritte 1 bis 3 bis schließlich H
h ≤2
ist.
Sobald dies der Fall ist, akzeptiert man η x0 + H; H2 als Näherungslösung für y(x0 +
H) und gehe zu dem nächsten Integrationsschritt über.
Da man bei einem Einkörperproblem 4 Werte hat, nämlich die jeweils 2 Koordinaten
des Orts und der Geschwindigkeit, muss man in das geschilderte Verfahren vier mal
durchführen. Für alle vier Werte wird dann die kleinste Schrittweite H benutzt.
KAPITEL 5. ERWEITERUNGEN
54
5.1.3
Beispiel
Anhand des Einkörperproblems soll nun der Vorteil eines Verfahren mit Schrittweitensteuerung gegenüber einem Verfahren ohne Schrittweitensteuerung dargestellt werden.
Zuerst macht die Schrittweitensteuerung die Berechnung der Bahnen einfacher, da man
nur noch einen Fehler einstellen muss. Planetenbahnen können so einfach und zuverlässig berechnet werden, auch wenn der Planet sehr nahe an der Sonne vorbeifliegt.
5
Zunächst also einige Bahnen, die mit εmax = 10−10 und den Startwerten ~r0 =
0
0
berechnet wurden. Nur die Anfangsgeschwindigkeit v in y-Richtung
und ~v0 =
v
variiert. Im Vergleich zu allen anderen davor berechneten Bahnen (siehe z.B. Abbildung 4.1) sind diese Bahnen auch in der Nähe der Sonne sehr exakt und zuverlässig.
In Tabelle 5.1 sind markante Daten dieser Berechnungen aufgelistet. Es wurde jeweils der Ort und die Geschwindigkeit des Planeten mit und ohne Schrittweitensteuerung nach exakt einer Umkreisung vorausgesagt. Die Schrittweite des Verfahrens ohne
mit
Schrittweitensteuerung
ohne
Schrittweitensteuerung
Startgeschw.
Umlaufdauer
Umkreisungen
Fehler
Schritte
Zeit
Min Schritt
Fehler
Schritte
Zeit
Min Schritt
Verhältnis Schritte
4
1,259
1
5.03E-10
411
0.43
2.34E-04
5.63E-10
6295
1.04
0.0002
15.32
10
5.02E-09
4097
4.18
2.34E-04
5.63E-09
62937
9.99
0.0002
15.36
8
1,981
1
1.02E-10
248
0.22
3.87E-03
1.03E-10
794
0.11
0.0025
3.20
10
1.02E-09
2465
2.03
3.87E-03
1.03E-09
7925
1.32
0.0025
3.22
Tabelle 5.1: Vergleich mit und ohne Schrittweitensteuerung
Schrittweitensteuerung wurde dabei einfach manuell so gewählt, dass ein vergleichbare Genauigkeit dabei herauskam. Interessant ist, dass diese Schrittweite kleiner ist als
die kleinste Schrittweite des Verfahrens mit Schrittweitensteuerung. Das liegt daran,
dass die Genauigkeit der Werte mit der Anzahl der Schritte sinkt wird. Somit muss die
Genauigkeit pro Schritt beim zweiten Verfahren größer sein als beim ersten.
5.2 Regulierung
Bei dem numerischen Lösen von Differentialgleichungen enstehen automatisch Fehler. Wie man mit diesen Fehlern umgehen kann wird z.B. in Kapitel 5.1 beschrieben.
Trotzdem kann es gerade beim Dreikörperproblem zu Problemen kommen, die nicht
mehr durch eine Schrittweitensteuerung ausgeglichen werden können.
5.2. REGULIERUNG
5.2.1
55
Rundungsfehlereinfluss bei Einschrittverfahren
Bei der praktischen Durchführung eines Einschrittverfahrens mit den Startwerten η 0 :=
y0 und
ηi+1 = ηi + hφ(xi , ηi ; h) xi+1 = xi + h
(5.16)
erhält man bei der Benutzung von Gleitpunktarithmetik (t Dezimalstellen) der relativen
Genauigkeit eps = 5 · 10−t statt der ηi andere Zahlen η˜i , die einer Rekursionsformel
der Form
η˜0 := y0
für
i = 0, 1, . . .
ci := gl (φ(xi , η̃i ; h))
di := gl(h · ci )
(5.17)
η̃i := gl(η̃i + hφ(xi , η̃i ; h) + εi+1
genügen, wobei sich der gesamte Rundungsfehler εi+1 in 1. Näherung aus 3 Anteilen
zusammensetzt
.
εi+1 = hφ(xi , η̃i ; h)(αi+1 + µi+1 ) + µ̃i+1 σi+1 .
(5.18)
Dabei wurden folgende Abkürzungen benutzt.
1.
αi+1 =
[gl (φ(xi , η̃i ; h)) − φ(xi , η̃i ; h)]
φ(xi , η̃i ; h)
(5.19)
ist der relative Rundungsfehler, der bei der Berechnung von φ in Gleitpunktarithmetik entsteht.
2. µi+1 ist der relative Rundungsfehler, der sich bei der Berechnung des Produktes
h · ci ergibt.
3. σi+1 ist der relative Rundungsfehler, der bei der Addition η̃i + di auftritt.
Gewöhnlich ist in der Praxis die Schrittweite h so klein, dass |hφ(xi , η̃i ; h)| |µ̃i |
.
gilt, und man hat, wenn |αi+1 ≤ eps| und µi+1 ≤ eps, somit εi+1 = µ̃i+1 σi+1 , d.h.
der Rundungsfehler wird in erster Linie durch die Additionsfehler σi+1 bestimmt.
Möchte man den gesamten Einfluss aller Rundungsfehler εi abschätzen, so erfordert
dies einen etwas größeren Aufwand. Eine Herleitung der Formel für den Gesamtfehler
kann man z.B. unter [16, S.126] nachlesen.
Vorausgesetz wird
|εi+1 | ≤ ε für alle i ≥ 0
(5.20)
und eine Lipschitzbedingung
|φ(x, y1 ; h) − φ(x, y2 ; h)| ≤ M |y1 − y2 | .
(5.21)
Dann gilt bei einem Verfahren der Ordnung p für den Gesamtfehler v(xi ; h) = η̃i − yi
ε eM |x−x0 | − 1
p
|v(x; h)| ≤ N |h| +
.
(5.22)
|h|
M
Diese Formel lässt erkennen, dass wegen des Rundungsfehlereinfluss bei einer Verkleinerung von |h| über eine gewisse Grenze hinaus der Gesamtfehler v(x; h) wieder
anwächst. Zu diesem Verhalten werden im nächsten Abschnitt einige Beispiele vorgeführt. Ein sehr deutliches Beispiel kann man aber auch in [16, S.127] nachlesen.
KAPITEL 5. ERWEITERUNGEN
56
5.2.2
Beispiel
In Tabelle 5.2 werden wie in Tabelle 5.1 Planetenbahnen mit verschiedenen Anfangsgeschwindigkeiten und mit dem maximalen Fehler εmax = 10−10 verglichen. Dabei
kommt der Planet der Sonne sehr nahe. Wie in Abschnitt 5.1.3 hängt der Fehler linear von der Anzahl der Schritte ab. Bereinigt man das Verhältnis der Fehler um diesen
Faktor, so erhält man die Daten aus der letzten Zeile. Der Fehler nimmt also auch unabhängig von der Anzahl der Schritte zu. Insgesamt wächst so der Fehler bereits nach
Anfangsgeschwindigkeit
Fehler
Schritte
Zeit
kleinste Schrittweite
kleinste Entfernung
Fehlerverhältnis
1
3.18E-09
836
0.77
2.37E-06
2.51E-02
-
0.1
4.08E-08
1867
1.65
1.48E-09
2.50E-04
5.7
0.01
5.89E-07
3497
2.86
9.35E-13
2.50E-06
7.7
0.005
1.39E-06
4152
3.29
1.02E-13
6.25E-07
2.0
Tabelle 5.2: Ohne Regulierung
einer Umrundung um den Faktor 10.000 über den geduldeten Fehler εmax hinaus. Eine
Verringerung von εmax führt zu einem Fehler. Die Schrittweite wird dann zu gering.
Auch eine weitere Verringerung der Startgeschwindigkeit führt zu diesem Fehler. Das
bislang verwendete Verfahren ist also für Situationen, in denen sich zwei Körper sehr
nahe kommen, nicht mehr geeignet.
5.2.3
Darstellung in der Hamiltonschen Mechanik
Die Hamiltonsche Mechanik wird in der Physik besonders dann genutzt, wenn man
mit Systemen umgeht, die gewissen Zwangsbedingungen unterliegen. Dieser Grund
spielt hier jedoch eine untergeordnete Rolle wichtiger ist, dass man Systeme, die man
mit der Hamiltonschen Mechanik beschreibt, einfach transformieren kann. Eine genaue
Beschreibung dieses Formalismus und der kanonischen Transformation findet man z.B.
in [7].
Zuerst muss die sogenannte Hamilton’-Funktion aufgestellt werden. Es gilt
H = Ekin + Epot =
P2
mM
−
,
2m
|X|
(5.23)
wobei Ekin die Bewegungs- und Eppot die potentielle Energie ist. P sei der Impuls und
X der Ort des Körpers. Die Bewegungsgleichungen sind dann vorerst
Ẋ =
∂H
∂X
und
Ṗ = −
∂H
.
∂P
(5.24)
Man kann nun ohne großen Aufwand einen neuen Satz von verallgemeinerten Koordinaten und Impulsen einführen.
5.2.4
Durchführung
Im Folgenden werden nach Levi-Civita[8] komplexe Zahlen zur Beschreibung einer
Koordinaten im R2 benutzt. Der Vektor (x0 , x1 ) entspricht z.B. der komplexen Zahl
5.2. REGULIERUNG
57
x = x0 + ix1 .
Um also das Problem des nahen Vorbeifluges des Planeten an der Sonne zu regulieren
wird die Abbildung X = x2 eingeführt. Die Wurzel vergrößert die sehr kleinen Abstände bei einer Beinah-Kollision. Dazu muss weiterhin eine fiktive Zeit s einführen
werden, die durch dt = |X| ds definiert ist. Es muss auch ein neuer verallgemeinerter
Impuls p ∈ C eingeführt werden, und zwar so, dass die Transformation der Koordinaten (X, P ) in die Koordinaten (x, p) kanonisch ist. Dann muss für den neuen Impuls
gelten
∂X
P = 2xP
p=
∂x
p
⇔P =
2x
Mit der Gesamtenergie E des Systems und ergibt sich dann
|P | mM
−
−E
K = |X| (H − E) = |X|
2m
|X|
p 2
|X| 2x =
− mM − E |X|
2m
2
|p|
2
=
− mM − E |x|
8m
Die regulierten Bewegungsgleichungen sind dann
und
dx
∂K
p
=
=
,
ds
∂p
4m
∂K
dp
=
= 2Ex und
ds
∂x
dt
2
= |X| = |x| .
ds
(5.25)
Mit den Real- und Imaginärteilen von x und p und der Differentialgleichung für die
Zeit ergibt das 5 Differentialgleichungen der Ordnung 1. Diese lassen sich mit einem
Runge-Kutta-Verfahren, wie in beschrieben,numerisch lösen.
5.2.5
Rücktransformation
Die Lösung dieses Differentialgleichungssystem ergibt eine Bahnkurve in den neuen
Koordinaten, wie sie in Abbildung 5.1 zu sehen ist. Man sieht deutlich, dass der Planet in den transformierten Koordinaten keine Probleme hat, die vergleichbar wäre zu
den alten Koordinaten. Mit diesen Daten ist so natürlich nichts anzufangen. Die Daten
müssen erst zurücktransformiert werden.
X = x2
(X0 + i X1 ) = (x0 + i x1 )2 = (x20 − x21 ) + i 2x0 x1
⇒ X0 =
x20
−
x21
und
(5.26)
X1 = 2x0 x1
Da Transformation für den Impuls und somit die Geschwindigkeit ist für die Bahn nicht
relevant und soll hier keine weitere Rolle spielen.
Mit dieser Rücktransformation ergeben sich dann die bekannten Bahnen (siehe z.B.
Abbildung 5.1.3).
KAPITEL 5. ERWEITERUNGEN
58
1.2
v0 = 1
v0 = 0.1
1
0.8
0.6
0.4
0.2
0
−0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Abbildung 5.1: Bahn in transformierten Koordinaten
5.2.6
Ergebnisse
Das regulierte Verfahren hat vor allem den Vorteil, dass viel weniger Schritte benötigt
werden. Unter den bereits oft verwendeten Anfangswerten mit der Startgeschwindigkeit v = 0.1 benötigt das herkömmliche Verfahren 1867 Schritte bei einer Genauigkeit
von εmax = 10−10 (siehe Tabelle 5.2). Das regulierte Verfahren benötigt nur noch 310
Schritte. Und das bei einer Genauigkeit von 10−12 . Die Anzahl der Schritte im regulierten Verfahren ändert sich auch dann kaum, wenn die Startgeschwindigkeit, und
somit der Abstand des Planeten von der Sonne, weiter sinkt. In Abbildung 5.2 ist die
Schrittweite der einzelnen Schritte dargestellt. Die Schrittweiten der regulierten Rechnung sind dabei in die Länge gezogen, damit die Schrittweite besser verglichen werden
kann. Deutlich wird hier, dass beim herkömmlichen Verfahren die Schrittweite sehr
schnell sehr klein wird und dort dann viele Schritte bleibt. Die Schrittweite des regulierten Verfahrens ist im Vergleich dazu sehr gleichmäßig auf einem vergleichsweise
hohen Niveau. Man sieht jedoch auch, dass das herkömmliche Verfahren in einiger
Entfernung von der Sonne größere Schrittweiten ergibt.
Mit einer Regulierung kann man in Extremsituationen deutlich bessere Ergebnisse erzielen. Es gibt jedoch keine Regulierung für ein allgemeines
n-Körperproblem. In Abschnitt 7.2 wird die Regulierung eines Spezialfalls des Dreikörperproblems vorgestellt.
5.2. REGULIERUNG
59
0.016
Normal
Reguliert
0.014
0.012
0.01
0.008
0.006
0.004
0.002
0
0
200
400
600
800
1000 1200 1400 1600 1800 2000
Abbildung 5.2: Vergleich reguliert und nicht-reguliert
60
KAPITEL 5. ERWEITERUNGEN
Kapitel 6
Das eingeschränkte
Dreikörperproblem
6.1 Einleitung
Bei dem eingeschränkten Dreikörperproblem handelt es sich um eine Vorstufe des
Dreikörperproblems. Während das Ein- und Zweikörperproblem noch analytisch gelöst werden kann, ist dies für alle Dreikörperprobleme unmöglich (siehe dazu auch
Abschnitt 7).
In der Natur treten Dreikörperprobleme der Art auf, dass 2 Körper im Vergleich zum
dritten Körper deutlich schwerer sind. Allgemein wird bei dem eingeschränkten Dreikörperproblem angenommen, dass die Masse des dritten Körpers vernachlässigbar bzw.
als m = 0 angenommen werden darf. Dann wirkt vom dritten Körper aus keine Kraft
auf die ersten zwei. Also dürfen diese zwei Körper isoliert betrachtet werden. Dazu gilt
es jedoch erst das Zweikörperproblem zu behandeln.
6.2 Das Zweikörperproblem
In [1, S.209] wird das Zweikörperproblem ausführlich beschrieben. Es lautet im engeren Sinne: Wie bewegen sich zwei Massenpunkte - z.B. die Sonne mit der Masse
M und die Erde mit der Masse m - in ihrem gegenseitigen Gravitationsfeld? Die Vektoren ~r1 und ~r2 bezeichnen die Lage der beiden Körper in einem Inertialsystem und
r = |~r1 − ~r2 | sei der Abstand der Körper untereinander. Dann lauten die Bewegungsgleichungen
M m ~r1 − ~r2
r2
r
M
m
~
r
−
~r2
1
.
m~r¨2 = − 2
r
r
M ~r¨1 =
(6.1)
Die Hauptresultate können durch Vergleich mit dem Einkörperproblem bestimmt werden, das in Abschnitt 4.1 aus Seite 33 zu finden ist. Beim Einkörperproblems ging man
davon aus, dass die Sonnenmasse M ruht. Aus der Gleichung
m~r¨ = −
M m ~r
r2 r
61
(6.2)
62
KAPITEL 6. DAS EINGESCHRÄNKTE DREIKÖRPERPROBLEM
können dann die Keplerschen Gesetze abgeleitet werden.
Zuerst wird gezeigt, dass das Problem auf ein ebenes (2-dimensionales) Problem
zurückgeführt werden kann. Aus der Summe der Gleichungen in 6.1 ergibt, dass keine
resultierende Kraft auf das System wirkt. Nach dem Trägheitsprinzip (1. Newtonsches
Axiom) bewegt sich dann der Schwerpunkt geradlinig und gleichförmig oder bleibt in
Ruhe. Nach dem Galileischen Relativitätsprinzip kann der Anfangspunkt des Koordinatensystems also in den Schwerpunkt S gelegt werden. Das heißt, das S als ruhend
betrachtet wird. Wenn im Weiteren ~r1 und ~r2 von S aus gemessen wird, so besteht die
Beziehung
M~r1 + m~r2
M +m
⇔ M~r1 + m~r2 = 0.
~rS =
(6.3)
Nach dem Satz der Drehimpulserhaltung ist nun
~ 0 = const,
M (~r1 × ~v1 ) + m (~r2 × ~v2 ) = L
(6.4)
~ o durch die Anfangslagen (~r10 , ~r20 ) und Anfangsgeschwindigkeiten (~v10 , ~v20 )
wobei L
bestimmt ist. Aus (6.4) folgt nach skalarer Multiplikation mit ~r1 und ~r2
~ 0 = 0 und ~r2 · L
~ 0 = 0,
~r1 · L
(6.5)
da beide Vektorprodukte senkrecht zu ~r1 und auch zu ~r2 stehen. Also stehen ~r1 und ~r2
~ 0 . Das heißt, beide Massenpunkte bewegen sich dauernd in der zu
auch senkrecht zu L
~ 0 senkrechten und durch den Schwerpunkt gehenden Ebene.
L
Des weiteren gilt für die durch ihre Massen dividierte Gleichung (6.1)
m + M ~r2 − ~r1
~r¨1 − ~r¨2 =
r2
r
m + M ~r
oder ~r¨ =
,
r2 r
(6.6)
wobei der Abstandsvektor oder relative Radiusvektor
~r = ~r2 − ~r1
(6.7)
die relative Bewegung - z.B. die Bewegung der Erde relativ zur Sonne - beschreibt.
Unmittelbar kann nur diese Bewegung beobachtet werden. Die Gleichung 6.6 hat dieselbe Form wie Gleichung beim Einkörperproblem. Für M kommt bei ihr M + m vor.
Dieser Unterschied ist nur bei dem 3. Keplerschen Gesetz wesentlich, weil bei den ersten beiden Gesetzen M nur in Verbindung mit beliebigen Konstanten auftritt.
Man kann also sagen: Für die aufeinander bezogenen Bewegungen der beiden Körper
bestehen die ersten zwei Keplerschen Gesetze ungeändert, das 3. aber verändert sich
zu
!
4π 2
4π 2
T2
.
=
=
(6.8)
m
a3
M +m
M 1+ M
Die rechte Seite ist für verschiedene Planeten des Sonnensystems verschieden, so dass
hinsichtlich der Umlaufzeiten zweier Planeten der Zusammenhang
T12 : T22 =
a31
a32
m1 :
2
1+ M 1+ m
M
(6.9)
besteht. Der Einfluss der Bewegung der Sonne äußert sich also in dem Verhältnis
Dies ist beim Jupiter, dem Planeten mit der größten Masse, rund 1 0 /00 .
m
M.
6.3. DIE BEWEGUNGSGLEICHUNGEN
63
Man kann auch auf den Schwerpunkt bezogene Bewegungen der beiden Körper
leicht feststellen. Die von S ausgehenden Vektoren ~r1 und ~r2 lassen sich durch das
obige ~r (siehe Gleichung 6.3 und 6.7) folgendermaßen ausdrücken:
M
m
~r,
~r2 =
~r.
(6.10)
M +m
M +m
Daraus ist ersichtlich: Die auf den Schwerpunkt bezogene Bewegung beider Körper ist
ebenfalls eine Keplersche Bewegung. Die Ellipse der Planeten ist wegen des Faktors
M
M +m ≈ 1 nahezu vom gleichen Maß wie die Ellipse der auf die Sonne bezogenen
Bewegung, und die Ellipse der Sonne eine um das Verhältnis Mm
+m kleinere Ellipse.
~r1 = −
6.2.1
Die reduzierte Masse
Man kann die Bewegungsgleichung dann folgendermaßen ausdrücken. Aus der Differenz der Gleichungen 6.1 und mit den Gleichungen 6.10 folgt
M m ~r2 − ~r1
M ~r¨1 − m~r¨2 = −2 2
r
r
mM
(m + M ) ~r
mM ¨
(6.11)
= −2
~r = 2 m+M 2
m+M
r
r
m∗ M ∗
~r0
= m∗~r¨ = −
r2
m
Das entspricht dem 1KP insofern, als dass ein Planet mit der Masse m∗ = MM+m
um
∗
eine Sonne der Masse M = (m + M ), die sich im Schwerpunkt der ursprünglichen
Massen befindet, kreist. Die Masse m∗ wird auch als reduzierte Masse bezeichnet. Das
Prinzip der reduzierten Masse findet in gleicher Weise auch für andere Potentiale als
das der Gravitation Anwendung. So z.B. bei der gekoppelten Schwingung von zwei
Massenpunkten.
6.3 Die Bewegungsgleichungen
Wie in Gleichung 3.2 beim Federpendel und in Gleichung 4.7 beim Einkörperproblem
kann man auch hier eine Bewegungsgleichung aufstellen.
X
¨
F~i = F~02 + F~12 = m2 ~x
i
¨ = m2 m0 (~x0 − ~x2 ) + m2 m1 (~x1 − ~x2 )
m2 ~x
d(~x2 , ~x0 ) |~x0 − ~x2 )| d(~x2 , ~x1 ) |~x1 − ~x2 )|
m1
m0
¨
x0 − ~x2 ) +
x1 − ~x2 )
~x =
3 (~
3 (~
d(~x2 , ~x0 ) 2
d(~x2 , ~x1 ) 2
(6.12)
Planet 2 sei dabei der Planet mit der zu vernachlässigenden Masse und d(xi , xj ) sei
der Abstand zwischen den Massen i und j.
6.4 Sonne–Erde–Mond
Die Eignung der drei Körper Sonne, Erde und Mond als eingeschränktes Dreikörperproblem kann folgendermaßen eingeschätzt werden [10, S.31]. Die drei Massen verhalten sich zueinander ungefähr wie mS : mE : mM = 300, 000 : 1 : 0.01. Das Verhältnis der Entfernungen der Massen untereinander beträgt ungefähr dSE : dEM = 390 : 1.
64
KAPITEL 6. DAS EINGESCHRÄNKTE DREIKÖRPERPROBLEM
Abbildung 6.1: Kräfte zwischen 3 Körpern
6.5. DIE REISE ZUM MOND
65
Die Entfernung des Mondes zur Sonne und die der Erde zur Sonne unterscheidet sich
nur vernachlässigbar.
Zuerst sollen die Effekte von Erde und Mond auf die Sonne verglichen werden. Die
Bewegungsgleichung der Sonne ist
mS mE
mS mM
(~rS − ~rM ) −
(~rE − ~rS ).
(6.13)
mS ~r¨S =
3
dSM
d3SE
Dabei steht E für die Erde, M für den Mond und S für die Sonne. Vergleicht man nun
die Kräfte von Erde und Mond auf die Sonne, so übt die Erde wegen ihrer größeren
eine ca. 100 mal größere Kraft auf die Sonne aus als der Mond. Würde man also den
Mond vernachlässigen, so ergäbe das einen Fehler von 1Bei der Bewegungsgleichung
der Erde würde der zweite Teil wegfallen, wenn man den Mond vernachlässigt.
mS mE
mM mE
mE ~r¨E =
(~rS − ~rE ) −
(~rM − ~rE ).
d3SE
d3M E
Vergleicht man die beiden Terme miteinander, so ergibt sich
2
mM dSE
≈ 0.005,
mS sEM
wenn der Unterschied der Entfernungen Sonne–Erde und Sonne–Mond nicht berücksichtigt wird. Damit ist der Effekt des Mondes auf die Erde nur 5·10−3 mal so groß wie
der Effekt der Sonne auf die Erde. Betrachtet man nun noch die Bewegungsgleichung
des Mondes
mM mS
mM mE
mM vecr
¨ M =
(~rS − ~rM ) +
(~rE − rM )
d3M S
d3M E
und das Verhältnis der Effekte von Erde und Sonne auf den Mond, so ergibt sich
2
mS dEM
≈ 2.
(6.14)
mE dSM
Die Bewegung des Mondes wird also eher von der Sonne als von der Erde beeinflusst.
Wirklich wichtig ist nun, dass der Effekt des Mondes auf die beiden anderen Planet
ca. 2 Größenordnungen kleiner ist als der Effekt der anderen Planeten untereinander.
Die Näherung durch das eingeschränkte Dreikörperproblem kann also höchstens für
Kurzzeitvorhersagen genutzt werden. Der Einfluss des Mondes ist zu groß, um ihn zu
vernachlässigen.
6.5 Die Reise zum Mond
In Jule Vernes Science-Fiction-Roman „Die Reise um den Mond“ wird beschrieben,
wie man sich vor ca. 150 Jahren wohl eben diese Mondreise vorgestellt hat. Nämlich
indem man mit einer großen Kanone eine bemannte Kanonenkugel zum Mond schießt.
Da die Masse der Kanonenkugel im Vergleich zur Masse von Erde und Mond nicht ins
Gewicht fällt, ist diese Reise ein eingeschränktes Dreikörperproblem. Dafür können
folgende Maßeinheiten, wie in Abschnitt 1.3.1 beschrieben, verwendet werden.
Strecke:
1m∗ = 100000000m = 108 m
Masse:
1kg ∗ = 1 Mondmasse = 7.35 · 1022 kg
Zeit:
1s∗ = 4.52 · 105 s = 5.23d
KAPITEL 6. DAS EINGESCHRÄNKTE DREIKÖRPERPROBLEM
66
Die Gravitationskonstante ergibt sich dann wie gewünscht als
G = 6.67 · 10
−11
6.67 · 7.35 · 1022 · 4.5164 · 105
m3
=
3
s2 kg
1011 · (108 )
=1
2
(m∗ )3
(s∗ )2 kg ∗
(m∗ )3
.
(s∗ )2 kg ∗
Die Masse des Mondes beträgt also 1 und die der Erde 81.3197. Die Entfernung zwischen dem Erd- und dem Mondmittelpunkt schwankt zwischen 3.56 und 4.07. Der
Startpunkt wird also auf (3.56, 0) festgelegt. Damit der Schwerpunkt der Massen im
Ursprung liegt und bleibt, startet die Erde bei (−0.0437, 0). Mit einer Startgeschwindigkeit von 4.926 für den Mond −0.0606 für die Erde verschwindet der Gesamtimpuls,
und der Schwerpunkt bleibt auf Dauer im Ursprung. In Abbildung 6.2 wird die Umlaufbahn des Mondes dargestellt. Er benötigt dann 5.54 Zeiteinheiten für eine Umrundung.
Das sind 28.5 Tage, was ziemlich gut den wirklichen Umständen entspricht. Insgesamt
wurde jedoch nicht versucht, die tatsächlichen Umstände penibel zu rekonstruieren.
Die Erde bewegt sich wegen ihrer deutlich größeren Masse kaum. Der Erdradius be4
Mondbahn
Erde
u
3
2
1
0
u
−1
−2
−3
−4
−5
−4
−3
−2
−1
0
1
2
3
Abbildung 6.2: Die Bahn des Mondes
trägt 0.06378. Somit ist und bleibt der Schwerpunkt des Systems innerhalb der Erde,
wie in Abbildung 6.3 zu sehen ist. Nun kommt also die Kanonenkugel hinzu. Sie wird
4
6.5. DIE REISE ZUM MOND
67
0.08
Erdradius
Erdbahn
0.06
0.04
0.02
0
s
−0.02
−0.04
−0.06
−0.08
−0.08 −0.06 −0.04 −0.02
0
0.02
0.04
0.06
0.08
Abbildung 6.3: Die Bahn der Erde
zum Zeitpunkt t = 0 am Ort (−0.0437, 0.067). Das ist aus der Sicht der Diagramme
genau oben auf der Erdkugel. Sie erhält eine Geschwindigkeit v = 48.81 und wird in
einem Winkel α = 0.491 · π zur positiven x-Achse abgeschossen. Diese Werte sind
allesamt empirisch ermittelt worden.
Nach t = 1.153 ist seine Distanz zum Mond zum ersten mal minimal. Dieser Punkt ist
in Abbildung 6.4 dargestellt. Die Kugel wird genau vor dem Mond her geschossen. Sobald sie sich weiter von der Erde entfernt hat als der Mond, bewegt sich der Mond unter
ihr weg. Die Entfernung Mond–Kanonenkugel beträgt dabei zum Zeitpunkt t = 1.15
nur noch 0.126. Das ist das 7-fache des Mondradius. Die Kugel wird vom Mond in
Richtung der negativen x-Achse beschleunigt. Das ist auch sehr wichtig, da sie sonst
zurück auf die Erde stürzen würde. Nun fällt sie an der Erde vorbei und umkreist sie im
weiteren Verlauf, wie in Abbildung 6.5 zu sehen ist, auf einer stark elliptischen Bahn.
Da das Geschoss keinen eigenen Raketenantrieb besitzt, ist die Bahn so gewählt, dass
die Kanonenkugel im Laufe ihrer Bahn von alleine wieder zurück auf die Erde fällt.
Nach einigen Umrundungen nähert sie sich erneut dem Mond, wie in Abbildung 6.6 zu
sehen ist. Diesmal beträgt die Entfernung zum Zeitpunkt t = 16.987 nur noch 0.107.
Das entspricht dem 6-fachen Mondradius und ist die kleinste Entfernung während der
Reise. Wenn man an den Roman von Jules Verne denkt, ist spätestens jetzt der Zeitpunkt gekommen, um ein paar Fotos zu machen.
Zum Ende der Reise ist es noch wichtig, wo auf der Erde die Kanonenkugel aufkommen wird. Abbildung 6.7 zeigt den Ort der Landung und in Tabelle 6.1 werden alle wichtigen Daten nochmal zusammengefasst. Benutzt man die Differenz der letzten
beiden Werte als Abschätzung für die Genauigkeit, so wird die Kugel zum Zeitpunkt
KAPITEL 6. DAS EINGESCHRÄNKTE DREIKÖRPERPROBLEM
68
4.2
4
3.8
3.6
3.4
3.2
3
2.8
2.6
2.4
−1
b
bb
bb bb
b bb×b× b
b b
b b
s
b
b
b
b
b
Mond
Kugel
Start
Schritte Mond
Schritte Kugel
b min. Entf.
b
b
b
b
b
b
s
b
b
×
s
−0.5
0
0.5
1
1.5
2
2.5
Abbildung 6.4: Bahn im Bereich 0.55 < t < 1.35
5
Kugel
Mond
4 Start
Erde
3
b
r
s
b
rb
c
2
cb
c
1
0
s
b
c
−1
−2
−3
−4
−5
rb
−4
−3
−2
−1
0
1
2
Abbildung 6.5: Bahn im Bereich 4.2 < t < 8.7
3
4
3
6.5. DIE REISE ZUM MOND
3
Mond
Kugel
min. Entf.
2.95
69
×
b ×
b
b
b b bb
b
b
b
b
2.9
2.85
b
×
b
2.8
2.75
b
b
2.7
2
2.05
2.1
2.15
2.2
2.25
2.3
2.35
Abbildung 6.6: Bahn im Bereich 16.3 < t < 17.8
εmax
10−9
10−10
10−11
10−12
10−13
10−14
x0
-0.02223
-0.02218
-0.02208
-0.02210
-0.02206
-0.02206
y0
0.05912
0.05918
0.05966
0.05957
0.05977
0.05978
Zeitpunkt
18.0156122
18.0151579
18.0150715
18.0150607
18.0150545
18.0150540
Tabelle 6.1: Daten der Landung
2.4
2.45
2.5
KAPITEL 6. DAS EINGESCHRÄNKTE DREIKÖRPERPROBLEM
70
0.14
Erde
Kugel
0.12
0.1
0.08
0.06
0.04
0.02
0
−0.06
−0.04
−0.02
0
0.02
Abbildung 6.7: Die Landung
0.04
0.06
6.5. DIE REISE ZUM MOND
71
t = 18.015054 ± 5 · 10− 7 landen, und zwar bei den Koordinaten (−0.0220 · 5 ·
10− 5, 0.0598 ± 5 · 10− 5). Die Kanonenkugel landet also nach 94 Tagen 4 Stunden
5 Minuten und 37 Sekunden. Dieser Wert ist auf 1/25 Sekunde genau. Der Ort der
Landung kann immerhin auf ca. 1km genau vorhergesagt werden.
Ein Kanonenkugel mit einer Masse von einigen Tonnen beeinflusst die Bahnen von
Erde und Mond nicht. Gerät die Masse des dritten Körpers jedoch in die Dimension
des Mondes, z.B. m3.Körper = 0.001mMond so ist die Bahn schon nach kurzer Zeit nicht
mehr mit der hier vorgestellten Bahn vergleichbar. Einige echte Dreikörperprobleme
werden in Abschnitt 7 diskutiert.
72
KAPITEL 6. DAS EINGESCHRÄNKTE DREIKÖRPERPROBLEM
Kapitel 7
Das Dreikörperproblem
Während das Zweikörperproblem vollständig gelöst werden kann, ist die strenge Lösung des allgemeinen Dreikörperproblems trotz der Bemühungen der bedeutendsten
Forscher nicht [1]. Von den 18 Integralen liefern die drei Erhaltungssätze (Impuls-,
Energie- und Drehimpulserhaltung) nur 10 Integrale, und es gibt außer diesen keine
weiteren von ihnen unabhängigen „algebraischen Integrale“. Auch die Nichtexistenz
gewisser allgemeiner Integrale wurde beweisen (Poincarè,1889). Die Schwierigkeiten
wurden weder beim ebenen noch beim sogenannten eingeschränkten Dreikörperproblem aufgehoben. Streng und durch elementare Formeln lässt sich das Dreikörperproblem nur unter gewissen, noch spezielleren Annahmen lösen, so z.B. im Lagrangeschen Spezialfall (1772), bei dem vorausgesetzt wird, dass die drei Körper anfänglich
ein gleichseitiges Dreieck bilden und dieses sich dauernd ähnlich bleibt. Näherungsmethoden (Reihenentwicklungen) zur Lösung des Dreikörperproblems und allgemeinerer
Probleme der Himmelsmechanik wurden in der astronomischen Störungstheorie entwickelt. Durch diese im Allgemeinen mit schwierigen Rechnungen verknüpften Methoden lassen sich die Bewegungen mit hinreichender Genauigkeit bestimmen bzw. in
Übereinstimmung von Beobachtungen deuten. Eine Ausnahme bilden die bei dem der
Sonne nächstgelegenen Planeten Merkur auftretende Anomalie (Perihelbewegung des
Merkur). Die große Bahnachse dreht sich in der Bahnebene, und die Drehung ist im
Jahrhundert um 43” größer als der Wert, den die Störungsrechnung ergibt. Diese Anomalie kann, wie es scheint, nur mit Hilfe der allgemeinen Relativitätstheorie erklärt
werden.
7.1 Fremde Welten
Nun soll ein Dreikörperproblem mit einem sehr schweren Raumschiff durchgespielt
werden. Dazu dient das System Erde–Mond–Raumschiff. Die Strecke wird in 100000000m,
die Masse in Mondmassen und die Zeit in 5.23d gemessen (siehe Abschnitt 6.5). Das
Raumschiff habe dabei die extrem große Masse 0.01. Es könnte z.B. in einer Umlaufbahn um die Erde zusammengebaut werden. Um die Erde verlassen zu können, kann
man sich eines Tricks bedienen. Man holt sich bei mehrere Umläufen Schwung. Dann
funktioniert nur mit mehreren anderen Massen. So z.B. nach 6.5 Zeiteinheiten (siehe
Abbildung 7.1). Während das Raumschiff auf die Erde zu fliegt, fliegt der Mond in
kurzer Entfernung für eine kurze Zeit vor dem Raumschiff her. Das Raumschiff wird
so zusätzlich beschleunigt und kommt so auf eine neue Umlaufbahn, auf der sich das
73
KAPITEL 7. DAS DREIKÖRPERPROBLEM
74
4.1
s
Raumschiff
Mond
Start
min. Entf.
b
b
b
4.05
b
b
b
b
b
4
s
×
b
3.95
b
3.9
b
b
b
b
b
×
b
b ×b
b
3.85
b
b
b
b
b
b
b
b
b
b
b
3.8
s
b
b
3.75
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Abbildung 7.1: Schwung holen, 6.5 < t < 6.6
0.5
0.55
7.1. FREMDE WELTEN
75
Raumschiff bereits auf 28 Längeneinheit von der Erde entfernt.
Nach 75 Zeiteinheiten wiederholt sich dieses „Schwung holen“ (siehe Abbildung 7.2).
Diesmal bekommt das Raumschiff genügend Schwung, um komplett der Erde entkom5.5
bs
b b
b
b b
5
b
4.5
b
b
b b bb
b b b b b b b ×
b b
b× b
b
b b
b
b
b
b
b
b
b
b
b
b
b
bs
b
b
b
4
3.5
3
2.5
b
2
Raumschiff
Mond
Start
min. Entf.
b
1.5
b
1
−3
b
−2
−1
0
1
2
3
s
×
4
Abbildung 7.2: Schwung holen, 74.8 < t < 76
men zu können. Für die Differenz zwischen Bewegungs– und potentieller Energie gilt
Ekin − Epot > 0. In Tabelle 7.1 wird die Entfernung im Laufe der Zeit dargestellt.
Demnach hat das Raumschiff eine Geschwindigkeit von ca. 3, das entspricht ca. 680 m
s
Zeit
Entfernung
100
90.46
200
407.96
400
1026.63
600
1641.47
1000
2867.87
Tabelle 7.1: Entfernung von der Erde
bzw. doppelter Schallgeschwindigkeit. Das hier beschriebene Verfahren wird in der
Praxis verwendet, um Sonden zu entlegenen Planeten zu schicken.
7.1.1
Raketenantrieb
Die eben errechnete Geschwindigkeit ist viel zu gering, um im Weltall nennenswerte Strecke zurück zu legen. Dies ließe sich mit einem Raketenantrieb ändern, der das
Raumschiff von einem bestimmten Moment an beschleunigt. Dabei wäre eine konstante Beschleunigung sinnvoll, so dass sich die Insassen an die Verhältnisse gewöhnen
können. Ideal wäre dann eine Beschleunigung von ca. 10 sm2 . In dem Raumschiff könnte
man sich dann bewegen wie auf der Erde. Dazu wären jedoch selbst unter idealen Bedingungen Unmengen von Treibstoff und eine extremes Verhältnis zwischen Treibstoff
und Nutzlast notwendig [17, S.849]. Auf lange Sicht erscheint eine Beschleunigung
KAPITEL 7. DAS DREIKÖRPERPROBLEM
76
g
≈ 1 sm2 als realistisch. Würde man in der Nähe der Erde mit der Beschleuvon a = 10
nigung beginnen, würde ein Großteil der Kraft verloren gehen. Holt man sich, wie in
diesem Beispiel, erst mal Schwung, so kann man das Gravitationsfeld der Erde hinter
sich lassen und dann beschleunigen. Damit wird kein kostbarer Treibstoff verschwendet.
Eine konstante Beschleunigung lässt sich leicht in die Bewegungsgleichungen einbauen, indem man zur bisherigen Gleichung eine konstante hinzu addiert. Wenn das Raumschiff in Richtung der negativen y-Achse mit der eben beschriebenen Beschleunigung
beschleunigt werden soll, sieht die neue Bewegungsgleichung folgendermaßen aus:
mM ond
mErde
(r − rMond ) − 2040
r¨0 = − 3 (r − rErde ) − 3
dErde
dMond
Dabei entspricht 2040 einer Beschleunigung von 0.1g. Behält man diese Beschleunigung ca. 66 Zeiteinheiten bei, so erreicht man ca. 1% der Lichtgeschwindigkeit. Die
Reise zum nächsten Stern αCentauri würde bei der Entfernung von 4.3 Lichtjahren [4,
S.87] immer noch über 400 Jahre dauern.
7.2 Ein Spezialfall des Dreikörperproblems
Der nun dargestellte Spezialfall des Dreikörperproblems wurde zum ersten mal von
Dr. Carl Burreau erwähnt [2]. Zuvor gab es die Meinung, die drei Massen würden in
eine periodische Bewegung übergehen. Hier wird dieses Dreikörperproblem erläutert,
weil es besonders hohe Ansprüche an den Algorithmus stellt und weil Regulierung in
diesem Fall Sinn macht. Die Ergebnisse werden teilweise mit Hilfe von MATLAB und
MAPLE erzeugt.
7.2.1
Startwerte und Bewegungsgleichung
Von einem Pythagorassches Dreikörperproblem spricht man, wenn die Anfangswerte
so gewählt sind, dass
1. die Anfangspositionen der Körper ein rechtwinkliges Dreieck bilden.
2. die Verhältnisse der drei Massen zu den jeweils gegenüberliegenden Seiten gleich
ist.
Alle Körper seien zu Beginn in Ruhe. Abbildung 7.3 zeigt derartige Anfangswerte. Die
Seiten haben die Längen 3,4 und 5 32 + 42 = 52 . Die Daten sind so gewählt, dass
sich der Schwerpunkt im Ursprung des Koordinatensystems befindet und dort auch
bleibt (Gesamtimpuls=~0).
Mit den Bezeichnungen
d0 = |~r2 − ~r1 | ,
d1 = |~r2 − ~r0 | ,
ergeben sich die Bewegungsgleichungen.
d2 = |~r1 − ~r0 |
~r1 − ~r0
~r2 − ~r0
~r¨0 = m1
+ m2
3
d2
d31
~r2 − ~r1
~r0 − ~r1
+ m2
~r¨1 = m0
d32
d30
~r1 − ~r2
~r0 − ~r2
+ m1
~r¨2 = m0
d31
d30
(7.1)
7.2. EIN SPEZIALFALL DES DREIKÖRPERPROBLEMS
77
Abbildung 7.3: Pythagorassche Anfangswerte
7.2.2
Lösen von Differentialgleichungen mit
Matlab
Matlab enthält einige Löser für Differentialgleichungen [19]. Diese Funktionen werden
als ode bezeichnet. ode steht für „Ordinary Differential Equation“, gewöhnliche Differentialgleichung. Dabei ist ode45 ein Runge-Kutta-Verfahren der Ordnung 4 wie es
in Abschnitt 4.8 beschrieben wird. Die Genauigkeit der errechneten Werte wird dann
mit einem Runge-Kutta-Verfahren der Ordnung 5 ermittelt. Insgesamt stellt sich dieses
Verfahren als ungeeignet heraus. Sowohl die Dauer der Berechnungen als auch deren
Genauigkeit ist völlig unzureichend wie man in Tabelle 7.2 sehen kann. Statt dessen
ode113
ode45
rel. Genauigkeit
1.00E-09
1.00E-10
1.00E-11
1.00E-09
abs. Genauigkeit
1.00E-09
1.00E-10
1.00E-11
1.00E-09
Dauer in Min.
2:45
3:00
6:00
>15
Schritte
9968
11016
17703
60175
Tabelle 7.2: MATLAB-Funktionen ode113 und ode45
wird ode113 benutzt. Dabei handelt es sich um ein Mehrschrittverfahren mit variabler
Ordnung nach Adams, Bashforth und Moulton. Es ist gegenüber ode45 dann im Vorteil
ist, wenn eine Fehlertoleranz zwingend eingehalten werden muss.
Die folgenden Eingaben ergeben eine erste Lösung.
>>global m0 m1 m2;
KAPITEL 7. DAS DREIKÖRPERPROBLEM
78
%Startwerte%
>>m0=5 m1=3 m2=4;
>>x00=[1;-1];x10=[1;3];x20=[-2;-1];xp0=[0;0];
>>options=odeset(’RelTol’,1e-10,’AbsTol’,1e-10);
>>[T1,Y1]=ode113(’f’,[0 63],[x00;xp0;x10;xp0;x20;xp0],options);
Zum Vergleich mit MATLAB wurden die Orte der drei Körper unter den gleichen Startbedingungen mit einem Algorithmus berechnet, wie er in Abschnitt 4.8 und Abschnitt
5.1 beschrieben wird. Im Anhang A wird der dazu benötigte Programmcode gezeigt.
Tabelle 7.3 zeigt die wesentlichen Daten dieser Rechnungen. Die berechneten Bahnen
εmax
10−10
10−11
10−12
Rechendauer in s
36.09
73.82
80.78
Schritte
13748
28709
33030
Tabelle 7.3: Eigener Algorithmus
sind dabei mit denen von MATLAB vergleichbar. Der Algorithmus benötigt zwar im
Vergleich zu ode113 deutlich mehr Schritte, ist aber trotzdem deutlich schneller. Das
kann mit den Gründen zu tun haben, die in Abschnitt 4.8.5 genannt werden. Es kann
aber auch an Excel und MATLAB liegen und.
In Abbildung 7.4 ist die Bahn der Masse m0 im Zeitraum 53 < t < 55 dargestellt. Man
kann deutlich erkennen, dass die Position nicht mehr genau bestimmbar ist. Mit Erhöhung der Genauigkeit konvergiert der Ort zum Zeitpunkt t = 55 nicht mehr wesentlich.
Der Grund für die starken Ungenauigkeiten liegt darin, dass die Funktion der Kraft eine
Singularität bei einem Abstand r = 0 aufweist. Kommen sich zwei Körper sehr nah, so
treten dabei i. Allg. sehr große Geschwindigkeiten auf und Matlab muss zum Ausgleich
sehr kleine Schrittweiten wählen. Das heißt, dass die Schrittweite manchmal sogar in
die Nähe der möglichen Genauigkeit kommt, was zu großen Rundungsfehlern und ungenauen Ergebnissen führt. Diese Ungenauigkeiten wirken sich genau dann, wenn sich
zwei Körper sehr nahe sind, besonders stark aus. Die knappste Beinahkollision tritt
zum Zeitpunkt t1 = 15.82 auf. Der Abstand der Massen m0 und m2 beträgt nur noch
d1 = 5.1331 · 10−8 , bei einer Maschinengenauigkeit von eps = 2.2204 · 10−16 .
7.2.3
Darstellung in der Hamiltonschen Mechanik
ode113 kann mit der hierher beschriebenen Formulierung des Problems nur unter extremen Rechenaufwand eine Verbesserung der Prognose bewerkstelligen. Für langzeitige
Prognosen ist das nicht mehr akzeptabel. Um die Effizienz zu steigern kann des Prinzip
der Regulierung angewandt werden, das in Abschnitt 5.2 beschrieben wird. Zuerst können jedoch die Daten reduziert werden. Dazu kann man Zwangsbedingungen nutzen.
Es gibt die
1. Drehimpulserhaltung
2. Impulserhaltung
3. Energieerhaltung
7.2. EIN SPEZIALFALL DES DREIKÖRPERPROBLEMS
2.8
79
10−9
10−10
10−11
2.6
2.4
2.2
2
1.8
1.6
1.4
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Abbildung 7.4: 53 < t < 55 mit ode113
Durch die Erhaltung des Drehimpuls bleiben die Körper in einer Ebene. Diese Bedingung gilt im Gegensatz zum Zweikörperproblem nicht allgemein. Unter den geschilderten Anfangsbedingungen sind und bleiben die Massen jedoch in einer Ebene. Die
Bewegungsgleichungen können also 2-dimensional gehalten werden.
Aus der Erhaltung von Impuls und Bewegungsenergie lässt sich schließen, dass sich
der Schwerpunkt der Massen im Ursprung des Koordinatensystems befindet und dort
auch bleibt. Es gilt also
2
X
mj x j = 0
und
j=0
2
X
mj ~r˙j = 0.
j=0
Auf diese Weise kann eine der Variablen xj eliminiert werden. Mit den neuen Variablen
X = r1 − r0
und
Y = r 2 − r0
P = m1 ṙ1
und
Q = m2 ṙ2 .
sowie die Impulse
Für die neuen, verallgemeinerten Koordinaten ist das System weiterhin voll bestimmt.
Die in (7.1) eingeführten Abstände ergeben sich als
d0 = |Y − X| ,
d1 = |Y |
und
d2 = |X| .
In der Notation der Hamiltonschen Mechanik ergibt sich dann, wie in Abschnitt 5.2.3,
die sogenannte Hamiltonfunktion als
2
H=
2
2
|P |
|Q|
m1 m2
m0 m1
m0 m2
|P + Q|
+
+
−
−
−
.
2m0
2m1
2m2
|Y − X|
|X|
|Y |
(7.2)
KAPITEL 7. DAS DREIKÖRPERPROBLEM
80
Mit dieser Funktion sind nun die Differentialgleichungen
Ẋ =
∂H
∂H
∂H
, Ẏ =
, Ṗ = −
∂P
∂Q
∂X
und
Q̇ = −
∂H
.
∂Y
Die Koordinaten r0 , r1 und r2 der drei Körper lassen sich zurückgewinnen mit
x0 = −
m1 X + m 2 Y
,
m0 + m 1 + m 2
x1 = x0 + X und x2 = x0 + Y.
Damit ist das Ziel erreicht, über die Zwangsbedingungen die Anzahl der Freiheitsgrade und somit die Anzahl der Differentialgleichungen zu minimieren. Die Formulierung
nach dem Hamilton-Formalismus bringt noch einen weiteren sehr entscheidenden Vorteil. Hamilton-Gleichungen sind forminvariant gegenüber Punkttransformationen. Man
kann also ohne großen Aufwand einen neuen Satz von verallgemeinerten Koordinaten
und Impulsen einführen.
7.2.4
Regulierung
Im Folgenden werden nach Levi-Civita[8] komplexe Zahlen zur Beschreibung einer
Koordinaten im R2 benutzt. Der Vektor (x0 , x1 ) entspricht z.B. der komplexen Zahl
x = x0 + ix1 . Um also die Beinahkollision der Massen m0 und m1 zu regulieren wird
die Abbildung X = x2 eingeführt. Die Wurzel vergrößert die sehr kleinen Abstände bei einer Beinah-Kollision. Dazu muss weiterhin eine fiktive Zeit s einführen, die
durch dt = |X| ds definiert ist.
Für den beschriebenen Fall, in dem drei Körper und zwei generalisierte Koordinaten vorliegen, wird eine Verallgemeinerung der Transformation von Levi-Civita nach
Waldvogel [18] benutzt. An Stelle der Variablen X, Y und der Zeit t werden die neuen
Koordinaten x, y und die verallgemeinerte Zeit s eingeführt als
− 2 2
2
2
x y
x − y2
X=
, Y =
und dt = r0 r1 r2 ds.
2
2
Der Grund für diese Wahl liegt in der Differenz zwischen X und Y für die gilt
Y − X = (xy)2 .
(7.3)
Damit lassen sich die alten Koordinaten X und Y mit dem gerade beschriebenen Effekt
als Summen von Quadraten darstellen.
Weiterhin müssen auch neue verallgemeinerte Impulse p ∈ C und q ∈ C eingeführt
werden. Und zwar so, dass die Transformation der Koordinaten (X, Y, P, Q) in die
Koordinaten (x, y, p, q) kanonisch ist. Nach [18] gilt dann
p
P
= ĀT
q
Q
mit
A=
∂X
∂x
∂Y
∂x
∂X
∂y
∂Y
∂y
!
=
x(x2 − y 2 )
x(x2 + y 2 )
−y(x2 − y 2 )
y(x2 + y 2 )
wobei ĀT das Komplex-Konjugierte von A bezeichnet. Die regulierten Bewegungsgleichungen sind dann
∂K dy
∂K dq
∂K dq
∂K
dt
dx
=
,
=
,
=−
,
=−
und
= r 0 r1 r2 .
ds
∂p ds
∂q ds
∂y ds
∂y
ds
(7.4)
7.2. EIN SPEZIALFALL DES DREIKÖRPERPROBLEMS
81
mit
K = r0 r1 r2 (H − E).
Dabei ist H die alte Hamiltonfunktion nach (7.2) und E die Gesamtenergie des Systems. Die Hauptarbeit besteht jetzt darin, jeweils die rechten Seiten der Gleichungen in
(7.4), also den Gradienten von K zu berechnen. Derartige umfangreiche Berechnungen können z.B. mit einem Computeralgebra-Programm wie Maple ausgeführt werden.
Diese Funktion soll im weiteren Verlauf als ’threebp’ bezeichnet werden. In [14] wird
ausführlich beschrieben, wie man mit MAPLE diese Funktion erstellen kann.
7.2.5
Lösung
Nun lassen sich die Anfangswerte mit den neuen Koordinaten bestimmen. Es gilt die
Transformationsvorschrift
q
q
√
√
√
√
Y + X und y =
Y − X.
x=
Dann ergeben sich die Startwerte
x = 1.5594395315555318362 + i · 1.0087804965427521214
y = 0.13280847188730666477 + i · 1.1966000386838271257
m0 m2
m1 m2
−769
m0 m1
+
+
=
E = V (0) = −
d2
d1
d0
60
(Zum Zeitpunkt t = 0 gibt es nur potentielle Energie.)
Mit diesen neuen Startwerten und der regulierten Funktion (’threebp’) aus Abschnitt
7.2.3 kann ode113 erneut gestartet werden.
>>global m0 m1 m2 EE;
>>m0=5 m1=3 m2=4;
>>p10 = 0; q10 = 0; p20 = 0; q20 = 0;
>>x10 = 1.5594395315555318362; x20 = 1.0087804965427521214
>>y10 = 0.13280847188730666477; y20 = 1.1966000386838271257
>>EE = -769/60;
>>options=odeset(’RelTol’,1e-10,’AbsTol’,1e-10);
>>[T1,Y1]=ode113(’threebp’,[0 7.98],[x10,x20,y10,y20,p10,p20,q10,q20,0],options)
Der Bereich 0 bis 8 entspricht in der realen Zeit in etwa einem Bereich von 0 bis 60
Zeiteinheiten. Ein Pentium 233 benötigt für die Berechnung der Daten dann ca. 35
Sekunden. ode113 benötigt insgesamt 2576 Integrationsschritte.
7.2.6
Rücktransformation
Mit den transformierten Werten lässt sich allerdings noch nicht viel anfangen. Wie
in Abschnitt 5.2.5 müssen alle Werte in auf die ursprünglichen Koordinaten zurück
transformiert werden. MATLAB erledigt das mit den folgenden Schritte:
>>x = Z(:,1)+i*Z(:,2);
>>y = Z(:,3)+i*Z(:,4);
>>X = (x.^2-y.^2).^2/4;
KAPITEL 7. DAS DREIKÖRPERPROBLEM
82
>>Y = (x.^2+y.^2).^2/4;
>>x0 = -(m1*X+m2*Y) / (m0+m1+m2);
>>x1 = x0 + X;
>>x2 = x0 + Y;
Diese Zeilen dokumentieren zudem die großen Vorteile von MATLAB im Umgang mit
Vektoren und Matrizen. Nun können die Bahnen betrachtet und ausgewertet werden.
7.2.7
Beurteilung der Ergebnisse
Die Abbildungen 7.5 und 7.6 verdeutlichen den Vorteil, den die Regulierung gebracht
hat. Bei dem Verfahren mit nicht-regulierten Koordinaten (Abbildung 7.6) ist die Schrittweite zum Teil über hunderte von Schritten (z.B. von Schritt 2800 bis Schritt 3200)
so klein ist, dass die Zeit praktisch nicht mehr voran schreitet. Wie in Abschnitt 5.2
beschrieben, entstehen an diesen Stellen Fehler, die auch durch noch kleinere Schrittweiten nicht aufgefangen werden können.
Die Schrittweiten des Verfahren mit regulierten Koordinaten erreichen nie derart kleine
Werte. Die Zeit schreitet viel gleichmäßiger voran. Das Diagramm zeigt aber auch das
bereits beschriebene Problem, dass Auftritt, wenn sich die Körper voneinander entfernen. Ideal ist somit ein Verfahren mit regulierten und nicht-regulierten Koordinaten,
0.1
Schrittweiten
Zeitverlauf
0.08
0.06
0.04
0.02
0
0
500
1000
1500
2000
2500
Abbildung 7.5: regulierte Schrittweiten
dass nur in kritischen Situationen reguliert.
Im Folgenden werden die drei Körper noch in einigen Zeitintervallen gezeigt. So z.B. in
Abbildung 7.7. Die Massen m0 und m2 aus ihrer Ausgangsposition heraus aufeinander
zu und sehr eng aneinander vorbei. In Abbildung 7.8 werden die Bahnen im Bereich
50 < t < 60 gezeigt. Es verdeutlicht, dass die Anfangswerte nicht in eine periodische
Bahn mündet. Vielmehr wird m2 so stark beschleunigt, dass sie nicht mehr zu den an-
7.2. EIN SPEZIALFALL DES DREIKÖRPERPROBLEMS
83
0.08
Schrittweite
Zeitverlauf
0.07
0.06
0.05
0.04
0.03
0.02
0.01
0
0
2000
4000
6000
8000
10000
12000
Abbildung 7.6: nichtregulierte Schrittweiten
2
s
1.5
m0
m1
m2
Start
min. Entf.
b
1
s
b
0.5
b
b
b
b
0 b
b
b
−0.5
s
b b
s
−1
−1.5
−1.5
b
−1
−0.5
0
0.5
1
Abbildung 7.7: Bahnen im Zeitraum 2 < t < 4
1.5
2
KAPITEL 7. DAS DREIKÖRPERPROBLEM
84
deren Masse zurückkehrt. Das ist ein ähnlicher Effekt, wie er in 7.1 beschrieben wird.
2
1
m0
m1
m2
Start
s
s
s
0
−1
−2
−3
−4
−5
−3
s
−2.5
−2
−1.5
−1
−0.5
0
0.5
Abbildung 7.8: Bahnen im Zeitraum 50 < t < 60
1
1.5
2
Anhang A
Numerik mit Excel
Excel ist eine bekannte und verbreitete Tabellenkalkulation. Es beinhaltet auch die Programmiersprache VBA (Visual Basic for Applications), eine Weiterentwicklung der
bekannten Sprache Basic, mit einer sehr komfortablen Programmierumgebung. VBA
kann Daten aus den Arbeitsmappen der Tabellenkalkulation lesen und auch in die Tabellen schreiben. Das bietet den Vorteil, die errechneten Werte sofort bearbeiten zu
können. Diagramme und Animationen können einfach erstellt und formatiert werden.
A.1 VBA
VBA ist automatisch in Excel enthalten und kann über [Extras]→[Makro]→[Visual
Basic–Editor] und alternativ über [Alt]+[F11] aufgerufen werden.
Um die Programmierung zu erläutern, wird der Programmcode des emphRunge–KuttaVerfahrens gezeigt.
Public Maxfehler
’### maximaler Fehler
’##############################################
’### Das Hauptprogramm
Sub start()
Maxfehler = 10 ^ (-NNN) ’### Fehler festlegen
DatenFestlegen ’### Startdaten einlesen
H = 0.1 ’### Schrittweite
AktZeit = 0 ’### Startzeit
Endzeit = 63 ’### und Endzeit
Do While AktZeit < Endzeit
Temp1 = Planet ’### 1. Näherung
Temp1 = Voraussage(H, Temp1)
Temp2 = Planet ’### 2.Näherung
For b = 0 To 1
Temp2 = Voraussage(H / 2, Temp2)
Next b
’### Schritt bewerten
Temp = BewertungSchritt(Temp1, Temp2)
85
86
ANHANG A. NUMERIK MIT EXCEL
If Temp < 2 Then
’### Schritt annehmen
AktZeit = AktZeit + H
Planet = Temp2 ’### Wert übernehmen
End If
H = 2 * H / Temp ’### neue Schrittweite
Loop
End Sub
’##############################################
’### Bewertet die errechneten Werte
Function BewertungSchritt(w1 As Werte, W2 As Werte) As Double
BewertungSchritt = 0
For b = 0 To 11
Temp = 2 ^ 4 / (2 ^ 4 - 1) * Abs(w1.Wert(b) - W2.Wert(b)) / Maxfehler
If Not Temp = 0 Then Temp = Exp(Log(Temp) / 5)
If Temp > BewertungSchritt Then BewertungSchritt = Temp
Next b
If BewertungSchritt = 0 Then BewertungSchritt = 1
End Function
’##############################################
’### Sagt Werte in "schritt" Zeiteinheiten voraus
Function Voraussage(schritt As Double, StartWerte As Werte) As Werte
Konst = schritt ^ 2 / 2
Voraussage = StartWerte
For a = 0 To 5 ’### T’s bestimmen
t(a, 0) = Voraussage.Wert(a) + schritt * Voraussage.Wert(a + 6) / 2
t(a, 1) = Voraussage.Wert(a) + schritt * Voraussage.Wert(a + 6)
Next a
’### Funktionswerte bestimmen
FWerte = Funktion(Voraussage)
’### k1 rausfinden und neue Werte Planet berechnen
For a = 0 To 5
k(a, 0) = Konst * FWerte.Wert(a)
Voraussage.Wert(a) = t(a, 0) + k(a, 0) / 4
Next
’### Funktionswerte bestimmen
FWerte = Funktion(Voraussage)
’### k2 rausfinden und neue Werte Planet berechnen
For a = 0 To 5
k(a, 1) = Konst * FWerte.Wert(a)
Voraussage.Wert(a) = t(a, 1) + k(a, 1)
Next a
’### Funktionswerte bestimmen
FWerte = Funktion(Voraussage)
’### k4 rausfinden und endgültige Werte berechnen
A.2. ANIMATIONEN
87
For a = 0 To 5
k(a, 3) = Konst * FWerte.Wert(a)
Voraussage.Wert(a) = t(a, 1) + (k(a, 0) + 2 * k(a, 1)) / 3
Voraussage.Wert(a + 6) = StartWerte.Wert(a + 6) + _
(k(a, 0) + 4 * k(a, 1) + k(a, 3)) / 3 / schritt
Next
End Function
’##############################################
’### Funktion der Differentialgleichung
Function Funktion2(Planet1 As Werte) As Werte
’### Abstände
Dist(0) = Sqr((Planet1.Wert(2) - Planet1.Wert(4)) ^ 2 + _
(Planet1.Wert(3) - Planet1.Wert(5)) ^ 2) ^ 3
Dist(1) = Sqr((Planet1.Wert(0) - Planet1.Wert(4)) ^ 2 + _
(Planet1.Wert(1) - Planet1.Wert(5)) ^ 2) ^ 3
Dist(2) = Sqr((Planet1.Wert(0) - Planet1.Wert(2)) ^ 2 + _
(Planet1.Wert(1) - Planet1.Wert(3)) ^ 2) ^ 3
For a = 0 To 1
’### Kraft auf Masse 0
Funktion2.Wert(0 + a) = _
Masse(1) * (Planet1.Wert(2
Masse(2) * (Planet1.Wert(4
’### Kraft auf Masse 1
Funktion2.Wert(2 + a) = _
Masse(0) * (Planet1.Wert(0
Masse(2) * (Planet1.Wert(4
’### Kraft auf Masse 2
Funktion2.Wert(4 + a) = _
Masse(0) * (Planet1.Wert(0
Masse(1) * (Planet1.Wert(2
Next a
End Function
+ a) - Planet1.Wert(0 + a)) / Dist(2) + _
+ a) - Planet1.Wert(0 + a)) / Dist(1)
+ a) - Planet1.Wert(2 + a)) / Dist(2) + _
+ a) - Planet1.Wert(2 + a)) / Dist(0)
+ a) - Planet1.Wert(4 + a)) / Dist(1) + _
+ a) - Planet1.Wert(4 + a)) / Dist(0)
A.2 Animationen
Mit VBA und Excel können Animationen einfach erstellt werden. Unter http://www.cip.mathematik.unistuttgart.de/ heidemjn/staatsexamen befindet sich eine Excel–Arbeitsmappe, die eine
Animation enthält.
Die Bewegung wird dadurch erzeugt, dass in Excel ein Diagramm erzeugt wird und
VBA diesem Diagramm Schritt für Schritt neue Werte zuordnet. Diese Methode funktioniert auf zügigen Rechnern anstandslos. Sie ist leicht umzusetzen und an die Bedürfnisse anzupassen. In der Datei ist der Programmcode offen einzusehen und kann nach
belieben abgewandelt werden.
88
ANHANG A. NUMERIK MIT EXCEL
Anhang B
Excel und LATEX
Alle Tabellen und Diagramme sowie fast alle Ergebnisse in dieser Arbeit wurden mit
der Tabellenkalkulation Excel97 von Microsoft erstellt. Tabellenkalkulationen können
große Menge einfach strukturierter Daten, wie sie beim Dreikörperproblem auftreten,
sehr komfortabel bearbeiten. Als Textsatzsystem diente LATEX, das für seinen hervorragenden Text– und Formelsatz bekannt ist. Um diese zwei Produkte miteinander zu
verknüpfen habe ich 2 Programme erstellt, die Tabellen und Diagramme aus einem
Excel–Arbeitsblatt heraus für LATEX erstellen können. Diese Programme lassen sich als
sogenanntes Add–In in Excel einbinden. Unter
http://www.cip.mathematik.uni-stuttgart.de/~heidemjn/staatsexamen
steht diese Datei frei und mit Quellcode zur Verfügung.
B.1 Tabellen
Ein Excel-Arbeitsblatt ist eine Tabelle mit Zeilen und Spalten wie in Abbildung B.1
dargestellt. Es ist also kein Problem eine Tabelle zu erstellen und zu formatieren. Ist
das oben beschriebene Add-In eingebunden, so erscheint in der Bedienleiste der Unterpunkt „Tex Hilfsmittel“. Wählt man den Punkt „Tabelle erstellen“, so wird der markierte Bereich für LATEX aufgearbeitet. Die Daten stehen dann in einer Datei „auto.tex“
in einem frei wählbaren Ordner und können mit den Befehlen
\begin{table}[htbp]
\begin{center}
\input{e:/projekte/staatsexamen/tabellen/Auto.tex}
\caption{Beispieltabelle}
\label{tab:Beispieltabelle}
\end{center}
\end{table}
eingebunden werden. Das Ergebnis ist dann Tabelle B.1.
Eine Tabellenkalkulation eignet sich zudem hervorragend, um komplizierte Verfahren
wie das Runge–Kutta-Verfahren aus Abschnitt 4.8 mit einfachen Daten auszuprobieren.
In einer Tabelle kann das Verfahren Schritt für Schritt durchgespielt werden, bevor es
„richtig“ programmiert wird.
89
ANHANG B. EXCEL UND LATEX
90
Abbildung B.1: Erstellen einer Tabelle
Autos
Typ
Marke
VW
Golf
Polo
Jetta
Opel
Vectra
Kadett
Leistung in
55
65
75
85
90
J
s
Werte
Höchstgeschwindigkeit in ms−1
140
150
160
150
160
Tabelle B.1: Beispieltabelle
B.2. DIAGRAMME
91
B.2 Diagramme
Diagramme sind wesentlich komplexer als Tabellen. Ich habe deshalb das Programm
GnuPlot verwendet, um Excel-Diagramme für LATEX aufzubereiten.
Gnuplot ist freie Software und kann unter
http://www.cs.dartmouth.edu/gnuplot_info.html heruntergeladen werden. Um ein LATEX–Diagramm zu erstellen, erstellt man wie gewohnt eine Excel–
Diagramm (siehe Abb. B.2), markiert das Diagramm und wählt die Option „Diagramm
erstellen“. Nun werden die Excel–Daten in einzelne Dateien geschrieben und eine Da-
Abbildung B.2: Erstellen eines Diagramms
tei mit Anweisungen für GnuPlot erstellt. Das Ergebnis kann mit den Befehlen
\begin{figure}[htbp]
\begin{center}
\input{../diagramme/ExcelLatex/ExcelLatex.tex}
\caption{Beispieldiagramm}
\label{dia:ExcelLatex}
\end{center}
\end{figure}
eingebunden werden und ist in Tabelle B.3 zu sehen. Der Vorteil ist, dass in Excel das
Diagramm sehr schnell und bedienerfreundlich formatiert werden kann. Mit dem Add–
In können Änderungen unverzüglich in das LATEX–Dokument übernommen werden.
ANHANG B. EXCEL UND LATEX
92
6
t=1
t=2
t=3
5
4
3
2
1
0
−1
−2
−3
0
0.5
1
1.5
2
Abbildung B.3: Beispieldiagramm
2.5
3
Literaturverzeichnis
[1] A. Budo. Theoretische Mechanik. Robert Rompe und Ernst Schmutzer, 3. edition,
1965.
[2] Carl Burrau. Numerische berechnung eines spezialfalles des dreikörperproblems.
Astronomische Nachrichten 195, page 113, 1913.
[3] L. Collatz. Numerische Behandlung von Differentialgleichungen.
Verlag, 2. edition, 1955.
Springer-
[4] Prof. Dr. Horst Stöcker et al. Taschenbuch der Physik. Verlag Harri Deutsch, 2.
edition, 1994.
[5] H. Heuser. Lehrbuch der Analysis, volume 1. B. G. Teubner Stuttgart, 11. edition,
1994.
[6] Klaus Höllig. Grundlagen der Numerik. Math Text, Zavelstein, 1998.
[7] Friedhelm Kuypers. Klassische Mechanik. Physik Verlag, 1983.
[8] T. Levi-Civita. Sur la régularisation du problème des trois corps. Acta Math. 42,
1920.
[9] L.F. und M.K. Gordon Shampine. Computer Solution of Ordinary Differential
Equations: the Initial Value Problem. W. H. Freeman, San Francisco, 1975.
[10] V. Szebehely and C.F. Peters. Theory of Orbits. Academic Press, 1967.
[11] Victor G. Szebehely. Adventures in Celestial Mechanics. University of Texas
Press, 1. edition, 1989.
[12] Paul A. Tipler. Physik. Spektrum, 1. edition, 1994.
[13] Walter Krämer und Götz Trenkler. Lexikon der populären Irrtümer. Eichborn, 8.
edition, August 1996.
[14] D. Gruntz und J. Waldvogel. Orbits in the three-body problem. Aus [15, Chapter
4]., 1997.
[15] Walter Gander und Jirí Hrebícek. Solving problems in scientific computing using
Maple and MATLAB. Springer, 3. edition, 1997.
[16] Josef Stoer und Roland Burlisch. Numerische Mathematik 2. Springer Verlag, 2.
edition, 1990.
93
94
LITERATURVERZEICHNIS
[17] H. Vogel. Gerthsen Physik. Springer, 19. edition, 1997.
[18] J. Waldvogel. A New Regularisation of the Planar Problem of Three Bodies.
Celest. Mech. 6, 1972.
[19] Matlab
the
language
of
technical
computing.
http://www.mathworks.com/access/helpdesk/help/pdf_doc/matlab/ref/refbook.pdf.
Eine ausführliche Beschreibung von ode113 liegt in [9] vor.
LITERATURVERZEICHNIS
95
Erklärung
h erkläre, dass ich die Arbeit selbständig und nur mit den angegebenen Hilfsmitteln
angefertigt habe und dass alle Stellen, die dem Wortlaut und dem Sinne nach anderen
Werken entnommen sind, durch Angabe der Quellen als Entlehnung kenntlich gemacht
worden sind.