2.1 Die Komponenten des Motors
Werbung

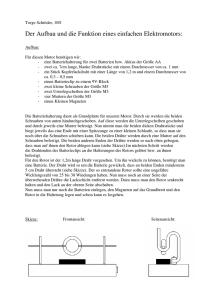
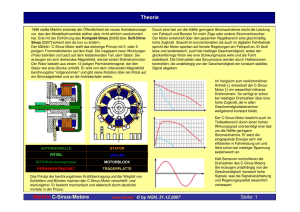
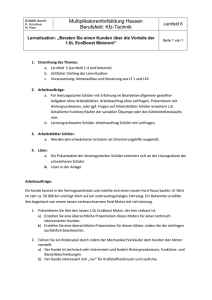
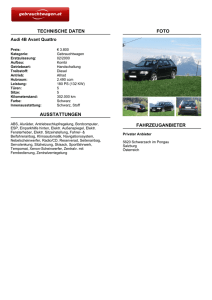
2003 Textliche Beilage zu einem Vortrag am Forum Kurt Rutishauser 20 V-Motoren Märklins Serien 12880 bis 12970 Inhalt 1. 2. Ganz wenig Elektro-Theorie 1 1.1 1.2 2 2 Der elektromechanische Aufbau 2.1 2.2 2.3 2.4 2.5 2.6 2.7 3. 1. Motorbaugruppe 1 Motorbaugruppe 2 Motorbaugruppe 3 Motorbaugruppe 4 Fehlersuche 4.1 4.2 4.3 4.4 4.5 4.6 5. Die Komponenten des Motors Das Schaltschema des Märklin 20 V-Basismotors Funktioniert der Basismotor für Gleich- und Wechselstrom? Das Drehmoment des Märklin 20 V-Basismotors Optimale Ausnützung der magnetischen Anziehungskraft des Ankers Optimale Positionierung der Kommutatoren Unterschiedliche Ankerbauarten Die Anker der verschiedenen Motorbaugruppen 3.1 3.2 3.3 3.4 4. Stromrichtung Bestimmung des Nordpols einer Spule Prinzipielles Fehlverhalten des Motors Motor dreht überhaupt nicht Motor dreht nur zögernd Motor dreht nur in einer Richtung oder gar nicht Letzte Hoffnung mit dem falschen Rotor Literatur 2 2 4 4 5 7 8 10 11 12 14 16 17 19 19 19 19 22 22 23 24 Ganz wenig Elektro-Theorie Nicht alle Modelleisenbahn-Idealisten konnten sich während ihrer Ausbildung das Wissen rund um die Elektrizität aneignen. Drum sei hier kurz auf zwei wesentliche Einzelheiten der Elektrizitätslehre hingewiesen. Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Februar 2003 / 20V-Motor Seite 1 1.1 Stromrichtung Bezogen auf den Gleichstrom, fliesst der Strom vom PLUS-Pol einer Stromquelle über den Verbraucher zurück zur Stromquelle an den MINUS-Pol. Bild 1.1.1: Stromrichtung: vom PLUS-Pol zum MINUS-Pol. 1.2 Bestimmung des Nordpols einer Spule Jenes Spulenende ist Nordpol, von dem aus gesehen der Strom in den Windungen entgegen dem Uhrzeigersinn kreist. Anders gesagt: umfasst die RECHTE HAND eine Spule, bei der der Strom in Richtung der Fingerspitzen fliesst, so zeigt der DAUMEN AUF DEN NORDPOL der umfassten Spule. Bild 1.2.1: Rechte-Hand-Regel. 2. Der elektromechanische Aufbau 2.1 Die Komponenten des Motors Die Fachwelt bezeichnet den Märklin 20 Volt-Allstrom-Motor als: Elektromotor mit DREIFACH-T-ANKER und gewickeltem Feldmagnet in Reihenschaltung Februar 2003 / 20V-Motor Seite 2 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Für die folgenden Betrachtungen sei der Motor auch 20 V-Basismotor genannt, sofern ihm keine spezielle Typenbezeichnung zugeordnet wird. Bild 2.1.1: Elektromechanische Motor-Komponenten des 20 Volt-Basismotors. Die Basis-Wirkungsweise dieses kleinen Elektromotors gilt für alle, meist sehr ähnlichen, 20 Volt Antriebsmotoren der Märklin-Modelle der Spur 0 (und auch der Spur I). So wie der Motor in Bild 2.1.1 (ohne Umschalter oder gewickeltem Doppel-Feldmagnet!) dargestellt ist, wird er im Nachfolgenden immer als „Basismotor“ bezeichnet. Der gewickelte Feldmagnet besteht aus einer Spule auf einem Blechpaket aus sieben 1 mm Transformatorenblechen (von der ungefähren Form wie in Bild 2.1.1 dargestellt) und wird gesamthaft als Stator bezeichnet. Der Stator wird zum Teil auch als Elektromagnet für das Betätigen von Umschaltern gebraucht. Zwischen den beiden Schenkeln (auf dem Bild 2.1.1: S + N des Spulenkörpers) – dem Joch – dreht sich der Rotor, hier als Dreifach-T-Anker ausgebildet. Gelagert ist dieser Rotor zwischen zwei Platinen (nicht gezeichnet), die als Motorgehäuse dienen. Die Wicklung des Feldmagneten ist via Kohle-Kontakt (roter Punkt) und von einem 3er-Segment des Kupfer-Schleifrings (Kommutator) mit der Wicklung des Rotors in Reihe geschaltet. Die vorgängig erwähnten Kohlen- (roter Punkt) und Bürsten-Kontakte (Kupferdrahtgeflecht, grüner Punkt) werden mit je einer Kupfer-Spiraldrahtfeder in den beiden Bürstenhülsen mit aufgeschraubten Bürstenkappen als elektrische Kontakte auf den dreifach unterbrochenen Schleifring (Kommutator) des Rotors gedrückt (siehe Bild 2.1.1). Neben der Herstellung einer optimalen Kontaktverbindung hat die Kohle ausserdem die Aufgabe, für eine gute Gleitfähigkeit auf dem dreifach unterbrochenen Schleifring zu sorgen, während dem der Kupferbürste die Aufgabe zufällt, die Schleifringfläche stets von Verunreinigungen frei zu halten. Diesen in Bild 2.1.1 dargestellten Basismotor verwendete Märklin z. B. als Antrieb für die Modelle: – – – – – Dampflok-Model R 12950 mit mechanischem Wechselgetriebe E-Lok-Model RS 12990 mit mechanischem Wechselgetriebe Dampflok-Model R 12880 ohne Handumschalter für Rückwärtsgang E-Lok-Model RS 12880 ohne Handumschalter für Rückwärtsgang Schienen-Zeppelin SZ 12970 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Februar 2003 / 20V-Motor Seite 3 2.2 Das Schaltschema des Märklin 20 V-Basismotors Eine bessere Übersicht des Stromflusses in unserem Motor vermittelt das Schema in Bild 2.2.1. Bild 2.2.1: Märklin 20 Volt-Basismotor ohne Umschalter. 2.3 Funktioniert der Wechselstrom? Basismotor für Gleich- und Wie bereits erwähnt, werden die hier besprochenen Märklin 20 Volt-Motoren auch als Allstrom-Motoren bezeichnet. Das bedeutet, dass sie nicht nur mit 20 Volt Gleichstrom, sondern auch mit 20 Volt Wechselstrom betrieben werden können, was nachfolgend am Basismotor erklärt werden soll. Bild 2.3.1: Normale Stromzuführung wie Bild 2.2.1. Bild 2.3.2: Plus- und Minus-Pol vertauscht. Februar 2003 / 20V-Motor Seite 4 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Wenn wir die Stromanschlüsse im Bild 2.3.1 bei Gleichstromspeisung vertauschen und die neue Situation bei den Magnetpolaritäts-Verhältnissen mittels der „Rechten-Hand-Regel“ betrachten, so müssen wir zur Kenntnis nehmen, dass sich die Drehrichtung (Bild 2.3.2) nicht ändert und der Motor immer noch im Uhrzeigersinn munter weiterdreht. Wenn wir zur ersten Schaltung (Bild 2.3.1) zurückkehren, dreht der Motor weiter im Uhrzeigersinn, auch wenn wir dieses Wechselspiel beliebig oft wiederholen. – Aber halt, das erinnert uns an etwas! Wechselt jetzt bei Wechselstrom die Spannungspolarität nicht auch alle 50 Sekunden? Ja, das tut sie! Allerdings mit einer Einschränkung: unser als Gedankenexperiment „erzeugter“ Wechselstrom ist nicht mit einer Sinuskurve vergleichbar, sondern präsentiert sich in einer rechteckigen Form, was aber in diesem Zusammenhang vernachlässigt werden kann. So haben wir gezeigt, dass die Märklin 20 Volt-Motoren auch mit Wechselstrom betrieben und somit als Allstrom-Motoren bezeichnet werden dürfen. 2.4 Das Drehmoment des Märklin 20 V-Basismotors Wie gross die Kräfte der sich anziehenden unterschiedlichen Pole sind, lässt sich nur sehr aufwendig berechnen. Wollen wir es auf einfache Art wissen, so drängt sich die im Bild 2.4.1 dargestellte Vorgehensweise auf. Da ein gemessenes Drehmoment in Nmm nicht sehr aussagekräftig ist, ist es angezeigt, alle Werte eines Drehsektors in einem Diagramm zu erfassen, aus dem ersichtlich ist, bei welchem Drehwinkel das grösste Drehmoment erreicht wird. Das ungefähre Resultat kann dem Bild 2.4.2 entnommen werden. Dazu ist anzumerken, dass die gewichtsbezogene Erfassung (Gewicht F in Gramm zur Berechnung des Motoren-Drehmoments MD) in 10° Umdrehungsschritten (siehe Graphik Bild 2.4.2) sehr zeitaufwendig ist und Bild 2.4.1: Motor-Drehmoment-Messung in Newton-Millivom Verfasser nicht durchgeführt meter. wurde. Die Werte wurden aufgrund einer Messung geschätzt und danach interpoliert. Dabei sei gleich festgehalten, dass folgende Faktoren in verschiedenster Weise die gemessenen Werte bei verschiedenen Motoren beeinflussen, wenn nicht gar verfälschen können: Elektrotechnische wirkende Störfaktoren: unterschiedliche Drahtwindungszahlen, zu kleiner Spulen-Drahtdurchmesser (zu grosser elektrischer Widerstand), zu grosse und unterschiedliche Zwischenräume zwischen Stator und Rotor, Umschalter-Probleme. Verantwortlich für ungleiche magnetische Kraftwirkung bei Vor- und Rückwärtslauf können insbesondere sein: falscher Einstellwinkel zwischen Anker und dazugehörendem Kommutator, ungenau zentriertes Rotor-(Anker-) Lager, ungenaue Montage. Mechanisch wirkende Störfaktoren: zu grosses, einseitiges Anker-Lagerspiel (Berührung von Stator + Rotor), kein Seitenspiel der Rotor-Welle (Welle klemmt), zu grosser Anpressdruck der Bürsten auf die Kommutatoren (Schleifring), zu grosser Getriebe-Reibungswiderstand, Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Februar 2003 / 20V-Motor Seite 5 falscher Zahnräderabstand, kein seitliches Spiel der Laufradachsen, zu grosse Lagerreibung bei den Zahnrad- und Laufradachsen (ausgelaufene Lager). U.a.m. Bild 2.4.2: Drehmoment-Diagramm zu Märklin-20 V Spur 0 Basismotor. Wenn wir dem Ablauf ab der Startposition 330° näher verfolgen, so stellen wir fest, dass: [1] bei der aktuellen Position 330° der Kommutator b über die rechte, blaue Bürste an die PLUSSpannung gelegt und damit der Haupt-Stromfluss (66,6%1)allein durch die Ankerspule-1 (rot) geleitet wird (Effekt: Spannungsfluss über Ankerspule-1 rot zum MINUS-Pol), [2] der Aktiv-Anker-1 (rot) damit eine NORD-Polarität erhält (rechte Handregel Abschnitt 1.2), [3] dieser Aktiv-Anker-1 dadurch einerseits im Anfangsbereich (oben) des linken Stator-Schenkels (NORD-Pol) abgestossen und anderseits vom rechten Stator-Schenkel (SÜD-Pol) angezogen wird, [4] der Rotor damit in eine Drehung im Uhrzeigersinn gezwungen wird, [5] nach einer 60°-Drehung (in der aktuellen Position 030°) die linke grüne Bürste den Kommutator a verlässt und auf den Kommutator c wechselt (Effekt: Spannungsfluss nun über Ankerspule-2 blau zum MINUS-Pol), [6] dadurch der Anker-2 (blau) zum Aktiv-Anker wird und im Endbereich der beiden stationären StatorSchenkeln vom SÜD-Pol-Schenkel abgestossen bzw. vom NORD-Pol-Schenkel angezogen wird, [7] der Rotor dadurch weiterhin während weiteren 60° im Uhrzeigersinn drehen muss, [8] nach dieser 60°-Drehung erneut ein Kommutatorwechsel stattfindet, [9] dieser Kommutatorwechsel den Anker-3 (grün) zum Aktiv-Anker „erkürt“, [10] dieser Anker-3 in der gleichen Position 330°, wie zum Ablauf-Beginn Anker-1, seine Arbeit als AktivAnker beginnt, usf. usf. usf. 1 Auffallend ist, wie immer ein Anker, abwechselnd einmal im oberen Bereich und danach einmal im unteren Bereich, zwischen den Stator-Schenkeln die Hauptarbeit von 66,6% übernimmt. Wie es zu diesem Wert (66.6%) kommt, ist Gegenstand der Ausführungen im nachfolgendem Abschnitt 2.5. Februar 2003 / 20V-Motor Seite 6 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg 2.5 Optimale Ausnützung der magnetischen Anziehungskraft des Ankers Die drei Ankerspulen 1, 2 und 3 als Baugruppe sind im Prinzip nach der Statorspule mit dieser in Serie geschaltet. Betrachten wir die Schaltung näher (Bild 2.4.1), so stellen wir fest, dass in der dargestellten Position (330° – 030°) zwischen den Kommutatoren a + b die Ankerspulen-2 und -3 parallel zur Ankerspule1 geschaltet sind und somit einen Stromteiler (Bild 2.5.1) im Verhältnis 2:1 bilden, d.h.: – Stromdurchfluss I1 der Ankerspule-1 = 66,6% vom Gesamtstrom Itot – Stromdurchfluss I2+3 der beiden anderen Ankerspulen-2 und -3 = 33,4% vom Gesamtstrom Itot - Bild 2.5.1: Schaltung der Ankerspulen, als Stromteiler wirkend. Daraus ist ersichtlich, dass die „aktivere“ Ankerspule1 in der Pos 330°-030° mit 66,6% des angelegten Stromes (Parallelschaltung mit den beiden andern Ankerspulen-2 und -3) versorgt wird. Die verbleibenden 33,3% werden also von den „passiveren“ Ankerspulen2 und -3 übernommen, mit der entsprechenden magnetischen Krafteinbusse. Es sei aber ausdrücklich festgehalten, dass die obigen Behauptungen nur für den statischen Zustand gelten. Die Verhältnisse für den dynamischen Zustand (wenn der Motor läuft) werden noch zusätzlich von sich zuschaltenden Induktionen (abhängig von Betriebstemperatur, Spalt zwischen Stator und Ankerflächen, Feinheit und Genauigkeit der Spulenwicklungen u.a.m.) beeinflusst. – Aber lassen wir das. Das resultierende Drehmoment auf die angetriebenen Räder unseres Motors wird wahrscheinlich noch von anderen, unbekannten negativen Einflüssen baulicher (mechanischer) Art beeinflusst. Wir haben also feststellen können, dass der „aktive“ Anker-1 während der Drehung des Rotors von 60° rund 2/3 des Stromes in die magnetische Wirkkraft legen kann. Lassen wir dies in einer Position geschehen, wo der Nordpol N des Ankers-1 die grösste Anziehungskraft auf den Südpol S des Stators, während 60°, ausübt (gesteuert durch die Stellung der bei den Bild 2.5.2: Magnetische Kraftwirkung des sich drehenden Ankers-1 und „aktiven“ dessen Wirkbereich. Kommutatoren a+b), so können wir während diesen 60° das grösste Drehmoment auf die Laufräder wirken lassen. Im nachfolgenden Bild 2.5.2 sehen wir anhand der eingezeichneten Kraftkomponenten, wie sich die magnetische, tangentiale Wirkkraft des Ankers-1 bei der Annäherung an den stationären Südpol des Stators rasch in eine radiale Wirkkraft umwandelt und zum erwünscht hohen Drehmoment nicht mehr viel beiträgt. Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Februar 2003 / 20V-Motor Seite 7 Im Drehmoment-Diagramm (Bild 2.4.2) ist ersichtlich, in welchem optimalen Bereich der Aktiv-Anker sich während seines Wirkens zu bewegen hat, nämlich im Wirkbereich von 60°, d.h. je 30° links und rechts der senkrechten Mittellinie des Stators, zum Achsen-Zentrum des Rotors führend. In Bild 2.5.2 ist dieser Wirkbereich gelb eingefärbt. Der Wirkbereich endet in einer Position des Ankers, bei der die für die Drehung des Rotors effizienten, tangential magnetischen Wirkkräfte in die weniger wirkungsvollen, radial magnetische übergehen. Würde der Anker weiterhin als Aktiv-Anker drehen, so würden die magnetischen Anziehungskräfte des Stators den Anker mit 66,6% der vollen Leistung (siehe Bild 2.5.1 und Text) in der Horizontalen der Skizze 2.5.2 ins Gleichgewicht zwingen. Darum der KommutatorWechsel am Ende des 60°-Wirkbereiches. Wird durch Verdrehen des Schleifringes mit den drei Kommutator-Segmenten im Gegenuhrzeigersinn ein verzögertes Umschalten auf den werdenden Aktiv-Anker erwirkt, so hat dies für den Motor einen Leistungsabfall (vergrösserter roter Bereich im unteren Diagramm der Bild 2.5.3) zur Folge. Die Zonen der radialen magnetischen Wirkkraft (blau auf Bild 2 5.2) beim Aktiv-Anker sollten daher tunlichst vermieden werden. Bei einem Verdrehen des Schleifringes aus der optimalen Position im Uhrzeigersinn passiert genau das Gegenteil. Der Aktiv-Anker bekommt anfangs des Eintritt in den Wirkbereich nur die Abstossung von dem zu verlassenden Statorschenkel zu spüren und profitiert später nur wenig von der wirkungsvollen Anziehungskraft des Gegenpol-Schenkels des Stators. Ungeachtet dieser Tatsache lassen sich relativ viele Märklin-Motoren mit nicht optimal ausgerichteten Einstellwinkel δ (delta, siehe Kapitel 3) finden. Erklärungen für diese von den theoretischen, optimalen Einstellungserkenntnissen festgestellten Abweichungen konnten nicht gefunden werden. Wie schon einmal angetönt, könnten diese aber damit in Zusammenhang gebracht werden, dass diese Abweichungen im dynamischen Erfahrungsbereich liegen und die abweichenden Einstellungswerte empirisch ermittelt wurden. - Bild 2.5.3: Magnetische Kraftwirkung der sich drehenden Anker und deren Wirkbereich. 2.6 Optimale Positionierung der Kommutatoren Die optimale Positionierung der Kommutatoren (Schleifring) finden wir, wenn es uns gelingt (durch möglichst genaue Justierung des Schleifringes) die „aktiven“ Kommutatoren in die Lage zu bringen, in der der jeweilige „aktive“ Anker als solcher im günstigsten Moment (am Ende der grössten tangentialen Anziehungskraft) als „Aktiver verabschiedet“ und diese freiwerdende Aufgabe demjenigen Anker zugewiesen werden kann, der gerade am Beginn des nächsten besten Wirkbereichs der resultierenden, magnetischen Anziehungskraft positioniert ist. Bild 2.6.1 zeigt wie die Aufgabe von Märklin gelöst wurde. Eine treffende Formulierung hat Linnenberger2 in einer Publikation aus den 20er-Jahren gefunden: 2 Wolfgang Linnenberger; Fine-tunig von Märklin-Motoren; 17. Tinplate-Forum; 2003. Februar 2003 / 20V-Motor Seite 8 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg „Die Stellung des Kollektors ist richtig, bei der eine Bürste auf einem Schlitz stehend das zugehörige Ankerhorn gerade vor einem Pol hat. Nur in diesem Fall läuft der Motor einwandfrei.“ Bild 2.6.1: Anker-Positionen während einer 180°-Anker-Drehung (Fortsetzung). Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Februar 2003 / 20V-Motor Seite 9 2.7 Unterschiedliche Ankerbauarten Der engere Abstand der Triebachsen bei einigen 12920-er Motoren (z. B. GR und CCS) und andere Loks), sowie der um 90° nach oben gedrehte Stator bei den 12920-GleichstromTypen (70-er-Fernschaltungen) erforderte Varianten in der Konstruktion der Rotoren. Wenn wir die ganze Palette der Märklin 20 V-Motoren durchgehen, so können wir generell feststellen, dass wir zwischen 2 Hauptgruppen zu unterscheiden haben, nämlich: Motoren mit parallel zur Stator-Wicklungsachse stehenden Bürstenpaaren (Augengesicht; Bild 2.7.1) und Motoren mit ungefähr senkrecht zur Stator-Wicklungsachse stehenden Bürstenpaaren (Nasengesicht; Bild 2.7.2) Bild 2.7.1: (links) Bürstenpaar parallel zur Statorwicklung Bild 2.7.2: (rechts) Bürstenpaar senkrecht zur Statorwicklung Im Besonderen aber unterscheiden sich die Motoren innerhalb der beiden generellen Hauptgruppen auch noch im Winkel δ (delta), dem Winkel zwischen der Zenterlinie eines Aktiv-Ankers und der Trennlinie zwischen den zwei dazugehörenden Kommutator-Segmenten dieses Ankers (Bilder 2.7.3, 2.7.4). Februar 2003 / 20V-Motor Seite 10 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Bild 2.7.3: (links) Winkel δ (delta) = 0°, Versetzungswinkel: 0° - δ = 0°. 3. Bild 2.7.4: (rechts) Winkel δ (delta) = 108°, Versetzungswinkel: 120° - δ = 12°. Die Anker der verschiedenen Motorbaugruppen Kurz zusammengefasst präsentiert sich die Palette der Märklin 20 V Spur 0 Motoren der Serien 12880 bis 12970 wie folgt (siehe auch Tabelle). Statorwicklung waagrecht – Bürstenanordnung waagrecht am Motorgehäuse: Motorbaugruppe 1, präsentiert im Abschnitt 3.1. Statorwicklung waagrecht – Bürstenanordnung rechtwinklig (senkrecht) am Motorgehäuse: Motorbaugruppe 2, präsentiert im Abschnitt 3.2. Statorwicklung fast senkrecht – Bürstenanordnung rechtwinklig (senkrecht) am Motorgehäuse: Motorbaugruppe 3, mit 66-er Umschaltung, präsentiert im Abschnitt 3.3. Statorwicklung fast senkrecht – Bürstenanordnung waagrecht am Motorgehäuse: Motorbaugruppe 4, mit 66-er Umschaltung, präsentiert im Abschnitt 3.4. Weitere Motorbaugruppen, finden sich bei älteren Motoren der 13xxx-Serien. Dabei finden sich teilweise gute Übereinstimmungen mit dem hier Gezeigten. Abweichungen können zudem anhand des hier Erläuterten auch gut hinterfragt werden. Spur I Motoren folgten im allgemeinen den gleichen Konstruktionsprinzipien. Motorbaugruppen der Spur 0 Serien 12880 bis 12970 (nicht abschliessend) Gruppe [1] δ 0° Gruppe [2] δ 96° Gruppe [3] δ 0° Gruppe [4] δ 108° R 12950 RS 12950 R 12970 R 12880 RS 12880 R 12890 RV 12890 R 12900 RS 12900 R 12910 RS 12910 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Februar 2003 / 20V-Motor Seite 11 R 66/12900 RS 66/12900 R 66/12910 RS 66/12910 T 66/12910 GR 66/12920 HR 66/12920 HS 66/12920 TK 66/12920 CCS 66/12920 AH 66/13020 ME 66/12920 E 70/12920 CS 70/12920 TCE 70/12920 R 66/12920 RS 66/12920 RV 66/12920 E 66/12920 CS 66/12920 TCE 66/12920 GR 70/12920 HR 70/12920 HS 70/12920 SLH 70/12920 TK 70/12920 AK 70/12920 ME 70/12920 L 70/12920 RP 12930 TWE 12930 SZ 12970 TW 12970 TW 66/12940 Bemerkung zur Konstruktion des Ankers: Die Grundkonstruktion entspricht der Konstruktionszeichnung (Bild 3.1.3). Die Rotoren unterscheiden sich nur (aber im wesentlichen) in der verschiedenen Anwendung des Einstellungs-Winkels δ. Weicht dieser Winkel vom berechneten und somit notwendigen Wert ab, so treten mit Sicherheit Funktionsstörungen auf (Langsamlauf, Stillstand in einer Drehrichtung, Leistungsabfall in einer oder beiden Drehrichtungen, usw.), auf die im Kapitel 4 näher eingegangen wird. Es muss aber ausdrücklich darauf hingewiesen werden, dass am Objekt durchaus Toleranzen von ca. ± 5° beobachtet werden, ohne dass für diese Abweichungen von den hier dargestellten theoretischen Werten vorläufig eine Erklärung gegeben werden kann. 3.1 Motorbaugruppe 1 – – Statorwicklung waagrecht Bürstenbrücke horizontal – δ = 0° Für die Darstellung des Einbaus und der Wirkweise des Ankers der Baugruppe 1 wurde der Motor des Märklin Modells R (oder auch RS) 12880 ausgewählt. Der Anker (Rotor) im Speziellen ist in den nachfolgenden Bildern 3.1.1 und 3.1.2 dargestellt. Februar 2003 / 20V-Motor Seite 12 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Bild 3.1.1: Märklin 20 V Motor für R 12880, Spur 0. Bild 3.1.2: Schaltschema des Ankers der Motorbaugruppe 1. Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Februar 2003 / 20V-Motor Seite 13 Bild 3.1.3: Konstruktionszeichnung des Ankers der Motorbaugruppe 1. 3.2 Motorbaugruppe 2 – – Statorwicklung waagrecht Bürstenbrücke senkrecht – δ = 96° Für die Darstellung des Einbaus und der Wirkweise des Ankers der Baugruppe 2 wurde der Motor des Märklin Modells GR 70/12920 ausgewählt (Bild 3.2.1). Die senkrecht zur Statorwicklung stehenden Bürstenpaare führten zu einer Positionsänderung der Kommutator-Segmente. Um eine gleiche, günstige Positionierung (Ankerhorn des Aktivankers vor einem Pol), wie beim Basismotor zu erhalten, musste der Schleifring um rund 90° im Gegenuhrzeigersinn verdreht werden. Als „Verdrehungs“-Winkel (Einstellwinkel δ) wurde in der Praxis für die Motorbaugruppe 2 der Winkel von 96° beobachtet. Gezeichnet wurde hier mit diesem Winkel. Die gefundene Abweichung vom theoretischen Winkel von 90° kann nicht erklärt werden. Der Anker (Rotor) im Speziellen ist in den nachfolgenden Bildern 3.2.1 und 3.2.2 dargestellt. Februar 2003 / 20V-Motor Seite 14 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Bild 3.2.1: Märklin 20 V Motor für GR 70/12920, Spur 0. Bild 3.2.2: Schaltschema des Ankers der Motorbaugruppe 2. Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Februar 2003 / 20V-Motor Seite 15 3.3 Motorbaugruppe 3 – – Statorwicklung fast senkrecht Bürstenbrücke senkrecht – δ = 0° Der Anker ist in der Praxis offensichtlich identisch mit demjenigen der Motorbaugruppe 1. Für die Abweichung des Einstellwinkels von der theoretischen Vorgabe von 12° kann bis dahin ebenfalls keine Erklärung gegeben werden. Die Beobachtung an zahlreichen Mustern lässt aber nur den Schluss zu, dass diese Art von Rotor durch Märklin in die Motorbaugruppe 3 eingesetzt wurde. Für die Darstellung des Einbaus und der Wirkweise des Ankers der Baugruppe 3 wurde der Motor des Märklin Modells GR 66/12920 ausgewählt. Der Wirkbereich ist gegenüber der Stator-Spulen-Mittellinie nicht symmetrisch angelegt. Die Asymmetrie der Magnet-Wirkungskräfte im Bereich der StatorSchenkelenden ist frappant, könnte aber ihre Ursache darin haben, dass im Bereich des Wippendrehpunktes bei angezogener Wippe auftretende Wirbelströme die Stärke der Magnetkräfte reduzieren. Der Anker (Rotor) im Speziellen ist in den nachfolgenden Bildern 3.3.1 und 3.3.2 dargestellt. Bild 3.3.1: Märklin 20 V Motor für GR 66/12920, Spur 0. Februar 2003 / 20V-Motor Seite 16 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Bild 3.3.2: Schaltschema des Ankers der Motorbaugruppe 3. 3.4 Motorbaugruppe 4 – – Statorwicklung fast senkrecht Bürstenbrücke waagrecht – δ = 108° Der Anker ist nicht identisch mit demjenigen der Motorbaugruppe 2. Der Schleifring wurde in der Praxis im Gegenuhrzeigersinn um 108° (Einstellwinkel δ) verdreht (siehe Abschnitt 3.2). Auch hier steht man vor einem Rätsel, läge doch der theoretische statische Wert irgendwo bei 100 bis 102°. Für die Darstellung des Einbaus und der Wirkweise des Ankers der Baugruppe 4 wurde der Motor des Märklin Modells R 66/12920 ausgewählt. Der Wirkbereich ist gegenüber der Stator-Spulen-Mittellinie nicht symmetrisch angelegt. Die Asymmetrie der Magnet-Wirkungskräfte im Bereich der Stator-Schenkel-Enden ist auch hier frappant und wird wohl die unter 3.4.3 erwähnten Ursachen in der Schaltwippe haben. Der Anker (Rotor) im Speziellen ist in den nachfolgenden Bildern 3.4.1 und 3.4.2 dargestellt. Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Februar 2003 / 20V-Motor Seite 17 Bild 3.4.1: Märklin 20 V Motor für R 66/12920, Spur 0. Bild 3.4.2: Schaltschema des Ankers der Motorbaugruppe 4. Februar 2003 / 20V-Motor Seite 18 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg 4. Fehlersuche 4.1 Prinzipielles – Es dürfte schwierig sein, dem Nachfolgenden zu folgen, wenn die Kenntnisse über die Konstruktion und elektrotechnischen Abläufe rund um den Märklin 20 V-Spur 0-Motor, dargelegt in den vorangegangenen Kapiteln, fehlen. – Um gewisse „Checks“ (Kontrollen) erfolgreich durchführen zu können, muss eine teilweise Demontage der Loks und des Motors in Kauf genommen werden. – Um allgemein Farbschäden an der zu untersuchenden Lok zu vermeiden, sollte diese mit den Rädern nach oben in eine, mit Schaumstoff ausgelegte Holz- oder Kartonschachtel gelegt werden. – Um einen korrekten Wiederzusammenbau zu garantieren, ist eine genaue Aufzeichnung der Demontage-Stufen oder eine einwandfreie Dokumentation über Einzelteile und über Zusammenbau des Motors unerlässlich. – Das Liegenlassen von demontierten Motorteilen auf dem Arbeitstisch sollte „verboten“ sein. Kleine Plastik-Behälter oder Tabak-Blechdosen eignen sich für eine sichere Aufbewahrung sehr gut. – Ein Schraubenzieher sollte benutzt werden zum Schrauben – und nicht als Brecheisen oder „Geissfuss“, sonst werden nach Behebung der elektrotechnischen Probleme solche mechanischer Natur angesagt sein. – Die Muttern sollten nur mit einem der Schlüsselweite der Mutter entsprechendem SechskantRohrschlüssel auf- bzw. zugedreht werden. Wird diese Prozedur mit einer Zange oder einem „Engländer“ (Rollgabelschlüssel) durchgeführt, so werden Beschädigungen von Muttern, Gewinden, Achsen und Farbe an anderen Teilen nicht vermeidbar sein. 4.2 Fehlverhalten des Motors Nachfolgend wird versucht, das Fehlverhalten eines Motors einer Lok zu analysieren und die geeigneten Massnahmen vorzuschlagen, damit sich die Sorgenfalten der Lokbesitzer wieder glätten mögen. Es soll im Nachfolgenden über die drei hauptsächlichen Möglichkeiten „gerichtet“ werden, die solche Sorgenfalten verursachen können: – Motor dreht überhaupt nicht → Abschnitt 4.2. – Motor dreht nur schwach, auf die Räder gestellt überhaupt nicht – Motor dreht nur in einer Richtung normal → Abschnitt 4.4. → Abschnitt 4.3. In erster Linie sollte man sich die Fragen stellen: a) Steht der Motor unter Strom? b) Ist die Ausgangsspannung gross genug, um einen Märklin 20 Volt-Motor zum Drehen zu animieren? c) Entspricht die Stromart dem vorhandenen Umschaltsystem des Motors? Ausnahme: Ein Märklin 20 Volt-Wechselstrom-Motor verweigert auch den Gleichstrom nicht (siehe Abschnitt 2.3), aber er lässt sich nicht durch einen Gleichstrom-Polwechsel in seiner Drehrichtung beeinflussen (siehe Abschnitt 2.3: Drehrichtungsänderungs-Voraussetzungen). Sind nun die oben vorgeschlagenen Vorabklärungen getroffen und stellt sich beim Verhalten des Motors keine Änderung ein, so kann mit den nachfolgenden Checks und Taten begonnen werden. 4.3 Motor dreht überhaupt nicht – Bevor der Motor vom Gehäuse der Lok separiert wird, sind folgende Kontrollen ein „Muss“: a. Sind je eine Kohlen- und eine Kupferbürste in den beiden Bürstenhülsen installiert? b. Sind die beiden unterschiedlichen Bürsten noch genügend lang und klemmen nicht an den Bürstenhülsen? c. Liegen die Bürsten mit normalem Federdruck und guter Leitfähigkeit an den KommutatorSektoren (Schleifring)? Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Februar 2003 / 20V-Motor Seite 19 d. – Sind die Kommutatoren frei von Schmutz, z. B. wegen irrtümlicher Installation von zwei Kohlenbürsten? Wenn OK, kann fortgefahren werden mit: a. Losschrauben der Bürstenhülsen. b. Entfernen der beiden Bürsten. c. Messen des ohmschen Widerstandes (das Messinstrument muss in der Lage sein, niedere Ohmwerte anzuzeigen) zwischen je zwei Lötpunkten an zwei Kommutatoren (gemäss nachfolgendem Bild. 4.3.1), alle drei Möglichkeiten. Bild 4.3.1: Widerstandsmessung an jeder der 3 Ankerspulen. d. Ergebnis der Ohmschen Messung: Zwei Messungen gleich, eine höher: Spule mit höherem Ohm-Wert: Unterbruch in einer der Stromzuführungen zu dieser Spule, oder in dieser Spule selbst. Reparatur oder Auswechslung der Spule. – Wenn Fall d. negativ (kein Unterbruch), kann fortgefahren werden mit: a. Ohne dass die Bürsten wieder eingesetzt werden: Widerstandsmessung der Statorspule. Februar 2003 / 20V-Motor Seite 20 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Bild 4.3.2: Widerstandsmessung an der Statorspule. b. Unendlicher Widerstand: Unterbruch in der Statorspule! Dies bedeutet: Eingänge zur Statorspule auf Unterbruch untersuchen, oder Statorspule neu wickeln, oder ganzen Stator ersetzen. Wenn die Widerstandsmessung (nach 4.3.1 und 4.3.2) erfolgreich mit einem normalem Wert (2-3 Ω für die Rotormessung und 4-5 Ω für die Statormessung) verlaufen ist, kann weiter nach dem Fehler gesucht werden. Dies dürfte aber ohne Demontage sehr schwierig durchzuführen sein. Eine Demontage, mit den in Abschnitt 4.1 skizzierten Sicherheits-Kriterien drängt sich auf. – Die Suche nach einem Stromführungs-Unterbruch muss nun systematisch durchgeführt werden. Ist der Motor vom Lok-Kasten getrennt, so sollte jede Drahtzuführung auf einen Unterbruch überprüft werden. Am besten eignet sich dazu ein kleines selbstgebasteltes Prüfgerät mit einer 4,5 Volt Taschenlampenbatterie gemäss Bild 4.3.3 oder einer anderen Stromquelle, wie z. B. einem Trafo mit entsprechender Lampe: Bild 4.3.3: Überprüfung eines Zuleitungsdrahtes auf Unterbruch. a. Zu überprüfender Draht an beiden Enden mit je einem Bananenstecker berühren: b. Lampe brennt nicht → überprüfte Drahtleitung weist einen Unterbruch auf! Reparieren! c. Lampe brennt wird. d. Sollten auch diese Untersuchungen zu keinem Ergebnis führen, so bleibt nur noch Folgendes übrig: e. Nochmals die Ausgangskriterien überprüfen: → Drahtleitung zuverlässig, weiter forschen, bis der Unterbruch gefunden Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Februar 2003 / 20V-Motor Seite 21 f. Motor unter Strom? Ausgangsspannung gross genug? Stromart passend? Umschaltsystem des Motors in Ordnung? Wenn diese Doppelprüfung wiederum ein negatives Resultat ergibt, muss angenommen werden, dass eine oder zwei falsche Komponenten montiert wurden, die zwar keinen Unterbruch zeitigen, aber sich anderweitig als ungeeignet erweisen. So drängt es sich auf, die in den nachfolgenden Kapiteln beschriebenen Untersuchungen einzuleiten: 4.4 4.5 Motor dreht nur zögernd, auf die Räder gestellt überhaupt nicht, oder Motor dreht nur in einer Richtung normal. 4.4 Motor dreht nur zögernd Sollten alle Versuche, den Grund für ein Fehlverhalten des unter Strom gesetzten Motors gemäss Abschnitt 4.2 zu finden, negativ verlaufen, so muss angenommen werden, dass eine der beiden Komponenten (Stator/Rotor oder beide) für den Wechselstrombetrieb mit 110 Volt Spannung konzipiert ist. Die für diese Spannung gewählten Spulen bedingen viel grössere Windungszahlen und einen viel höheren Widerstand der Spule (Drahtdurchmesser 0.15 mm statt 0.35 mm). Beim Betrieb mit einer ungefährlichen Spannung von nur 20 Volt, wirkt sich dann der viel zu grosse Drahtwiderstand aus. Statt ein Drehmoment für einen Lauf auf den Schienen zu erzeugen, rufen die 20 Volt Spannung nur eine leichte Erwärmung der Spulen hervor. Eine Umwicklung mit einem 20 Volt kompatiblem Spulendraht ist vor allem beim Rotor kompliziert und kostspielig. Bevor man sich zu einem solchen Vorgehen entschliesst, wäre es vielleicht von finanziellem Nutzen, die nachfolgende Checkliste nochmals zu konsultieren: Elektrotechnische Störfaktoren: unterschiedliche Drahtwindungszahlen, zu kleiner Spulen-Drahtdurchmesser (zu grosser elektrischer Widerstand), falscher Einstellwinkel zwischen Anker und dazugehörendem Kommutator (ungleiche, magnetische Kraftwirkung bei Vor- und Rückwärtslauf), ungenau zentriertes Rotor-Lager (ungleiche, magnetische Kraftwirkung), zu grosse und unterschiedliche Zwischenräume zwischen Stator und Rotor, ungenaue Montage (ungleiche, magnetische Kraftwirkung bei Vor- und Rücklauf), Umschalter-Probleme. Mechanische (bauliche) Störfaktoren: Zu grosses, einseitiges Anker-Lagerspiel (Berührung von Stator und Rotor), kein Seitenspiel der Rotor-Welle (Welle klemmt), zu grosser Anpressdruck der Bürsten auf die Kommutatoren (Schleifring), zu grosser Getriebe-Reibungswiderstand, falscher Zahnräderabstand, kein seitliches Spiel der Laufradachsen, zu grosse Lagerreibung bei den Zahnrad- und Laufradachsen (ausgelaufene Lager). U.a.m. 4.5 Motor dreht nur in einer Richtung oder gar nicht Es dürfte bekannt oder zum Mindesten plausibel sein, dass bei einem zu grossen Luftspalt zwischen der Stator-Innenfläche und der Rotor-Peripherie die magnetische Kraftwirkung (Anziehungs- und AbstossungsKraft) mit zunehmender Distanz rapid abnimmt. Dies wirkt sich unweigerlich auf die „Drehfreudigkeit“ des Rotors aus. Februar 2003 / 20V-Motor Seite 22 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Dreht nun ein Märklin 20 V-Motor nur unwillig oder gar nicht, so muss ein solches Fehlverhalten mit einem zu grossen Luftspalt in Zusammenhang gebracht werden. In den Bildern 4 5.1 und 4.5.2 wird versucht, dies zu erklären. Es sei in diesem Zusammenhang auf die Arbeit „Fine-tuning von Märklin Motoren“ von Herrn Wolfgang Linnenberger hingewiesen. Bild 4.5.1: Auswirkung eines zu grossen Luftspaltes zwischen Wippe und Rotor auf die Anziehungskraft. Bild 4.5.2: Auswirkung eines zu grossen Luftspaltes zwischen Wippe und Rotor auf die Anziehungskraft. 4.6 Letzte Hoffnung mit dem falschen Rotor Sollten nun wirklich alle vorangegangenen Bemühungen negativ verlaufen sein, so muss die Lage langsam als angespannt bis dramatisch bezeichnet werden. Ein guter Rat: [1] Räumen Sie erst einmal auf. [2] Montieren Sie alle geprüften Teile wieder, die die Untersuchung (Check) bis jetzt bestanden haben. Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg Februar 2003 / 20V-Motor Seite 23 [3] Lesen Sie nochmals das Kapitel 3 durch. [4] Suchen Sie darin „Ihren“ kranken Motor aus und überprüfen Sie den darin eingebauten Rotor aufs Genauste, es könnte ja sein – dass Ihr Motor mit einem „falschen“ Rotor verheiratet wurde. Hier, im Bild 4.6.1 die Begründung: „Nase“-Rotor im „Augen“-Motor. Bild 4.6.1: Ein falscher Rotor im richtigen Motor bringt Ärger. Sollte auch dieser Versuch zu keinem Erfolgserlebnis führen, so haben Sie wenigstens den Test der Erfolglosen bestanden, der Sie in die Schicksalsgemeinschaft einiger gleichfalls schwergeprüften TinplateFans einreiht, die ebenso beim „Fine-tuning“ (fast) einen Flop zu verzeichnen hatten. 5. Literatur – Gebr. Märklin & Cie, G.m.b.H.; Die elektrische Spiel-Eisenbahn; Göppingen 1937; Bestellnummer 2753. – Fritz Rinderknecht; Einrichtungen zum Fahrrichtungswechsel; 12. Tinplate-Forum; 1998. Auch in revidierter Fassung erhältlich als Druckversion des TINPLATEFAN (http://www.tinplatefan.ch), einschliesslich dem Anhang mit den Schaltschemata. – Dipl. Ing. William Seibt; Selbstbau eines elektrischen Triebwagens; Dresden. Februar 2003 / 20V-Motor Seite 24 Tinplate Forum, Förderverein für die Erhaltung technischen Kulturgutes, D Rendsburg