Modellierung und Simulation Spintronischer Bauelemente / S LV64
Werbung

Modellierung und Simulation
Spintronischer Bauelemente / S
LV64.456, Modul MPM2
WS 2008/2009
Modellierung und Simulation
Spintronischer Bauelemente / S
LV64.456, Modul MPM2
Dr. rer. nat. M. Bolte, Prof. Dr.-Ing. D. P. F. Möller
Inhalt
Einführung
Spintronische Anwendungen
Grundlagen der Modellierung und Simulation
Approximation und Diskretisierung
Modelle für Spintronische Simulationen
Physikalische Grundlagen (Leitfähigkeit und Temperatur in
Halbleitern, Magnetismus)
Beispielhafte Modelle: Elektrodynamik, Mikromagnetisches Modell
Simulationsplattformen
Räumliche Diskretisierungen:
Finite-Elemente-Methode vs. Finite-Differenzen-Methode
Zeitliche Diskretisierung:
Numerische Integration
Comsol, SPICE, Matlab, M³S, OOMMF
Simulationen verschiedener Spintronischer Anwendungen
Seminarplan
Studentische Vortragsthemen und Termine
Anschließendes Projekt im SS 2009
Einführung
Mittels elektrischer Ladung des Elektrons werden im Transistor – Kernkomponente der modernen Informationstechnik – Informationen codiert und
verarbeitet. Kaum genutzt wird dagegen die zweite wichtige Eigenschaft des
Elektrons: sein Spin oder Eigendrehimpuls.
In modernen Rechnerkomponenten beeinflussen, in dünnen ferromagnetischen
Schichten, kleinste Magnetfelder den Elektronen-Spin und als Folge davon
auch den Widerstand der Komponente, der wegen des kleinen Magnetfeldes
sehr groß ist, so genannter Riesen-Magnetwiderstand (GMR).
Für die Entdeckung des Riesenmagnetowiderstandseffekts erhielten 2007
Peter Grünberg (Institut für Festkörperforschung, Forschungszentrum Jülich)
und Albert Fert (Université Paris-Sud, Orsay, Frankreich) den Nobelpreis für
Physik.
Diese Entdeckung ermöglichte es, aus winzigen Schichtstrukturen, optimale
Leseköpfe für Festplatten zu bauen, was letztendlich in der industriellen Entwicklung magnetischer Speichermedien sehr hoher Datendichte mündete.
Das zeitabhängige elektronische und magnetische Verhalten dieser Speicherund Logikzellen kann durch mikromagnetische Simulation dargestellt werden.
Einführung
Was ist Spintronik?
Die Forschung und Entwicklung von Technologien und Bauelementen, bei
denen Informationsspeicherung und Logik nicht nur durch die Elektronenladung (elektrische Ströme und Spannungen), sondern auch durch den
Elektronenspin realisiert werden, stehen im Zielfokus des Seminars.
Spinelektronik beschäftigt sich mit all denjenigen Phänomenen, bei denen
der Spin von Ladungsträgern die elektrischen Eigenschaften beeinflusst.
Unter „spintronischen Bauelementen“ werden nachfolgend sowohl die
eigentlichen „spin-elektronischen Bauelemente“ als auch diejenigen
verstanden, die durch eine mittelbare Interaktion von elektrischen Strömen
und Elektronenspins eine erweiterte Funktionalität haben,.
Einführung
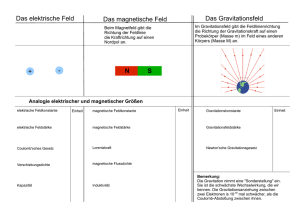
Spintronik = Elektronik x Spin
Elektronik: Elektronische Schaltkreise, Frequenzverhalten, etc.
R1
Quelle: Gross, WMI München
R2
Elektronen haben zusätzliche Eigenschaft, den Spin
Der hat nur zwei mögliche Zustände, “ “ oder “ “.
(das ist parallel oder antiparallel gegenüber einem
angenommenen Feld in z-Richtung, das die
Symmetrie aufhebt.
R1
R2
R1
R2
Spintronik beschreibt nun
Veränderungen in den
elektronischen Eigenschaften
eines Systems aufgrund des
Spin-Freiheitsgrads.
Einführung
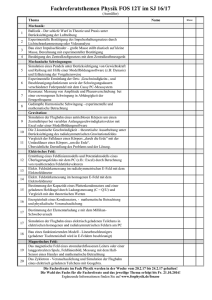
Beispiel: Riesenmagnetowiderstand
Elektronen können von einer
magnetischen Dünnschicht zur anderen
unter Beibehaltung ihres Spins gelangen:
Spindown
eSpinup
Durch spin-abhängige Streuung
tritt ein Magnetowiderstandseffekt beim
Ummagnetisieren eines Kontaktes auf:
∆R
R0
WiderstandsModell
(Two-current
model):
GMR-Effekt im
Lesekopf:
~ 15 %
Einführung
Spintronik hat in Hamburg eine lange Tradition:
1886: Dem Hamburger Heinrich Hertz gelingt die Übertragung
von Signalen durch elektromagnetische Wellen.
1922: Otto Stern entdeckt, dass der Spin von Elektronen
quantisiert ist (Physik-Nobelpreis 1943).
1925: Wolfgang Pauli entdeckt in Hamburg das Ausschließungsprinzip, das wesentlich für das Verständnis von
Ferromagneten ist (Physik-Nobelpreis 1945). Postuliert, dass
Spins nur zwei Zustände annehmen kann: „spin-up“ und „spindown“.
Entwicklungsmöglichkeiten von hier aus
Weitere Vorlesungen Informatik
Computer Modelling and
Simulation
Advanced Computer Architecture
Vorlesung Hardware/Software CoDesign
Weitere Vorlesungen Physik
Elektronik I und II
Nanostrukturphysik
Vertiefungsveranstaltung zur
Nanostrukturphysik I
Blockpraktikum
Bachelorarbeiten
Praktika (Informatik), Vorbereitungsprojekt (Physik)
Forschungsstudenten,
Masterarbeiten/ Diplomarbeiten
Doktorarbeiten
Mögliche Vortragsund Praktikathemen
in diesen Farben
Inhalt
Einführung
Spintronische Anwendungen
Grundlagen der Modellierung und Simulation
Approximation und Diskretisierung
Modelle für Spintronische Simulationen
Physikalische Grundlagen (Leitfähigkeit und Temperatur in
Halbleitern, Magnetismus)
Beispielhafte Modelle: Elektrodynamik, Mikromagnetisches Modell
Simulationsplattformen
Räumliche Diskretisierungen:
Finite-Elemente-Methode vs. Finite-Differenzen-Methode
Zeitliche Diskretisierung:
Numerische Integration
Comsol, SPICE, Matlab, M³S, OOMMF
Simulationen verschiedener Spintronischer Anwendungen
Seminarplan
Studentische Vortragsthemen und Termine
Anschließendes Projekt im SS 2009
Einführung
Beispiele für spintronische Anwendungen
Existierend:
Spin-elektronische Anwendungen:
Magnetoresistive Sensoren (AMR, GMR, TMR)
Leseköpfe für Festplatten (GMR), im weiteren Sinne auch die Festplatten selbst
Magnetische RAMs
Aktuatoren
Festplatten
Permanentmagneten für Generatoren, Elektromotoren, etc.
Forschungsthemen:
Shape Memory Alloys (SMAs)
Racetrack memory
STT-RAM
Festplatten:
Bit patterned media (BPM)
Heat assisted magnetic recording (HAMR)
Spin transistor
Quantencomputing, …
Einführung
Beispiele heute:
1.
2.
Magnetoresistive Sensoren
Magnetische Speichermedien:
GMR-Leseköpfe
2. Festplatten
3. Magnetische Hauptspeicher (MRAM)
1.
3.
Modellierung und Simulation elektrischer Schaltkreise
1. Magnetoresistive Sensoren
Magnetoresistive Winkelgeschwindigkeitssensoren
Magnetoresistive Winkelsensoren
Magnetoresistive Sensoren
für Schwachfeld-Detection
Barber-Pole-Sensoren
Ein Barber‘s pole!
Quelle: NXP
Barber-Pole-Sensoren
United States Patent 6831456
Quelle: NXP
Physikalisches Modell
Anisotroper Magnetowiderstand (AMR)
Aufspaltung des Widerstands durch AMR
RAMR ∝ ρ ⊥ + ∆ρ ⋅ cos 2 α ,
Parabelförmiger Anstieg aufgrund
des normalen Magnetowiderstands
Ursache: ungleichmäßige räumliche
(anisotrope) Verteilung der
Ladungsdichten durch Spin-Bahn-WW
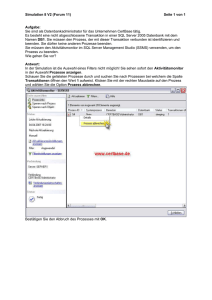
Bereich aktueller Forschung:
Messung und Simulation des lokalen AMR
AMR-measurements at 2 K
1µm
500nm
self-consistent
calculation
1st approx. simulation initial S-state
500 nm
initial Cstate
V
I
M. Bolte, et al., PRB 72, 224436 (2005)
Bereich aktueller Forschung:
Messung und Simulation des lokalen AMR
Simulation – Approximations:
1.
AMR-measurements at 2 K
α
• Constant, uniform current flow
self-consistent
calculation
1st approx. simulation initial S-state
2.
• Exact current flow as
given by microscopic Ohm‘s law
• Potential and Current density are
functions of magnetoresistance
initial Cstate
M. Bolte, et al., PRB 72, 224436 (2005)
Vergleich Messungen und Simulation
MFM
Measured MFM images
1µm
Calculated MFM images
Magnetization from
Simulation
A
B
C
D
AMR
0.23 Ω offset
0.1 Ω offset
0.05 Ω offset
E
A
B
C
DE
2x1 µm² 70 nm simulated
4x2 µm² 70 nm measured
2.1 Magnetische Festplatten
Aufbau
Arm
Spindel
Lese-Schreibkopf
{
Aktuator
Platter (3)
2.1 Magnetische Festplatten
Aufbau
Arm
Arm
Gleiter
Spindel
Spindel
Schreibkopf
Lese-Schreibkopf
{
Aktuator
Platter (3)
Aufbau einer Festplatte
Ansprüche an einzelne Bauteile
Wenige Atomlagen!!
Aufbau einer Festplatte
Ansprüche an einzelne Bauteile
6 nm =
20 Atomlagen!!
Geschwindigkeit =
7200rpm·π·3,5 inch
~120 km/h
Quellen: HitachiGST
• Verglichen dazu müßte ein Flugzeug
mit 800 km/h konstant 1 cm über dem Boden fliegen!!
• Möglich durch extrem glatte Oberflächen
und Luftkissen unter dem Gleiter
Lese und Schreibköpfe
Pro Wafer ca. 40,000 Leseköpfe
Schreibkopf
Lesekopf realisiert
durch GMR-Dreischichtsystem
Magnetische Dipole erzeugen
ein Feld über der Festplatten-Oberfläche
Polschuhe bringen
Magnetfeld auf die
Festplatten-Oberfläche
GMR-Effekt:
•Grundlagen
•Anwendungen
Aufbau einer Festplatte
Lesekopf – GMR-Effekt
4x3x0.86 mm
55 mg
860x700x230 µm
0.6 mg
2x1.63x0.43 mm
5.9 mg
Quellen: HitachiGST
Mooresches Gesetz
•Ursprünglich:
kosteneffizienteste Anzahl von Bauelementen auf einem Chip,
•Dann: Verdoppelung der Anzahl von Transistoren in Prozessoren
innerhalb von 18 Monaten
•Gilt auch für Festplatten: Verdoppelung der Speicherdichte
bei Festplatten in 12 Monaten (heißt hier eigentlich „Kryder‘s Law“.
2.2 Festplattenoberflächen
Fortschritte in der Speicherdichte
1956 - 5 Mbyte
RAMAC 1956
70 kbits/s
2 kbits/in2
50x 24” disks
$10,000/Mbyte
4 Gbyte
~ 6 Filme
2008 - 1 Tbyte
Microdrive
100 Gbits/in2
1 x 1” disk
~ 800 Mbits/s
250 Gbits/in2
2 x 3.5”glass disks
< $0.0001/Mbyte
Quelle: Hitachi GST
Fortschritte in der Speicherdichte
Bit-Größe
Bits 1991
Bits 1998
IBM Research Almaden
AG Schatz, Uni Konstanz
Wozu braucht man Simulationen?
TU Vienna, AG Fidler
Bit Patterned Media (2011?)
Einzeldomänen Mehrere Domänen
Quelle: Hitachi GST
Bit-Patterned Media
Heat assisted magnetic recording
Soll bis zu einem Faktor 10mal größere Speicherdichten erlauben
>1 Terabit/in² ~10 TeraByte-Festplatten
Beispiele heute:
1.
2.
Magnetoresistive Sensoren
Magnetische Speichermedien:
1.
2.
3.
3.
GMR-Leseköpfe
Festplatten
Magnetische Hauptspeicher (MRAM)
Modellierung und Simulation
elektrischer Schaltkreise
2.3 Magnetische Hauptspeicher
MRAM
2.3 Magnetische Hauptspeicher
MRAM
Magnetic Random Access Memory
R. Gross, TU München
Wie MRAMs funktionieren
Lesemodus
© Cypress Semiconductors
Schreibmodus
Vorteile der MRAM-Technologie
Nichtflüchtig – keine
Refreshing-Zyklen im
Hauptspeicher notwendig
Energiesparend
(heute werden in Computern ca. 50%
der Leistung durch Auffrischen der
Hauptspeicherzellen verbraucht)
Herstellung durch etablierte
CMOS-Technologie
Geringe Produktionskosten
Hohe Speicherdichte
möglich
Sehr hohe Schreib-LeseGeschwindigkeiten möglich
(prinzipiell GHz), vgl. Flash
MRAM in Standard CMOS
Nur etwa ~20 extra
Schritte notwendig
(von insgesamt ~250)
4Mb-MRAM
© Cypress Semiconductors
Quelle: Freescale (Motorola)
MRAM als programmierbares
Bauelement?
•
Eine einzige Zelle genügt, um die
wesentlichen Befehle AND, OR,
NAND, NOR Speichern
durchzuführen
•
In Laufzeit programmierbar
•
Sehr schnelle, dichte logische
Einheit
•MRAM Logic
für rekonfigurierbare Logiken
•Spin-transfer-torque
•STT-RAM
•Nano-Oszillatoren
A. Ney, C. Pampuch, R. Koch & K. H. Ploog, “Programmable computing with a
single magnetoresistive element”, Nature 425, 485 (2003)
Warum Simulation?
Ultraschnelles Schalten: Wie schnell geht es?
1. Problem: Magnetisches Klingeln
(Nachschwingen der Magnetisierung)
verlängert Dauer des Umschaltenvorgangs
2. Lösung: Mehrere Pulse, die gerade so
lang sind, dass Umklappen erfolgt
(„Precessional Switching“)
3. Wichtig: Die Grundfrequenzen
(Eigenmoden) der Elemente kennen.
5.9 GHz
H1
H2
Bit-Leiterbahn
I2
9.2 GHz
I1
Wort-Leiterbahn
I1
Randmode
Centermode
einer 220nm großen MRAM-Zelle
I2
t
Warum Simulation?
Einfluß der Form: Zuverlässiges Schalten
M. Kläui, C A F Vaz, L Lopez-Diaz and J A C Bland
J. Phys.: Condens. Matter 15 (2003) R985–R1023
M. Kläui et al., Phys. Rev. B 68, 134426 (2003)
“Mikromagnetismus ist ein äußerst wichtiges
M. H. Park et al., Appl. Phys. Lett. 83, 329 (2003)
Werkzeug für die Optimierung der Strukturform“
Dr. K. Ounadjela
3. Modellierung und Simulation
elektronischer Systeme
Notwendigkeit durch größere Konkurrenz
bei gleichzeitigem Anstieg der Systemkomplexität
Innovationsdruck durch Globalisierung führt zu immer
kürzeren Innovationszyklen (Time-to-Market)
Lösung: Modellierung und Simulation elektronischer Systeme
Verschiedene Ansätze:
Model-Based-Design für komplette Designzyklen
Für neue Komponenten oder Technologien: Modellierung
und Simulation einzelner Bauelemente
Simulation des Zusammenspiels elektronischer
Bauelemente mit Hilfe von Netzlisten (SPICE)
Schnellere Hardware-Entwicklung
durch Simulationssoftware
Design and prototype process flow. From cst.com
Model-Based Design
Automatische Generierung von Maschinencode,
Systemspezifikation und Testbedingung
Beschreibung der erforderlichen
Logik und Prozeßflüsse in Simulink
Zusammen mit programmierbarer Hardware
eine Plattform für Rapid-Prototyping
(Hardware-in-the-loop)
Halbleiter- Simulationen
Hochfrequenz-Simulationen eines kompletten ICs
Berechnung der Stromdichteverteilung/ elektrischen
Potentiale für 24pin highspeed IC (Infineon)
Abtastpunkte erlauben das Auslesen
von Lösungsvariablen an beliebigen Stellen
Komponenten moderner
Simulationssoftware
1. CAD Tools zur komfortablen Systemspezifikation
2. leistungsfähige Solver zur Berechnung der
Lösungsvariablen (meist gut versteckt)
3. Visualisierungswerkzeuge zur Darstellung
vieldimensionaler Variablen
4. komplexe, auf den Bedarf zugeschnittene Analysewerkzeuge
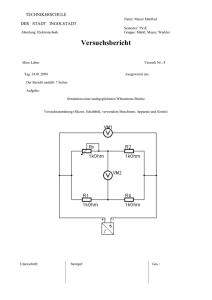
SPICE (Simulation Program with
Integrated Circuit Emphasis)
Netzliste für einfachen Schaltkreis links
Die Berechnung des (dynamischen) Verhaltens
von elektronischen Schaltkreisen erfolgt z.B. über
die Maschen-Knotenregel. Als Grundlage dafür
sind möglichst genaue Modelle der realen Bauelemente vonnöten (siehe unten).
Feedback von Euch
Seminarplan
Seminarzeitplan
Dienstags 12:00 – 14:00 Uhr; F-132
Beginn: 23. Oktober 2008
Ende: 10.02.2009
Präsenz
Anwesenheitspflicht !
Fehlen nur in sehr begründeten Ausnahmefällen: max. 2
Fehltermine (!), informieren Sie den Veranstalter im Vornherein !
Themenvorschläge für Referate