Aufbau und Modellierung einer
Werbung

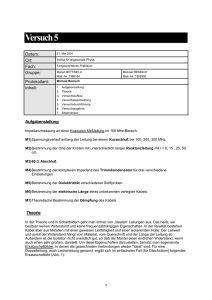
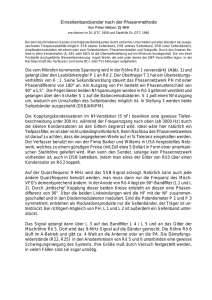
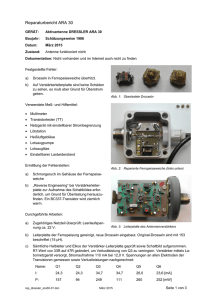
Aufbau und Modellierung einer Bordnetznachbildung für hohe Frequenzen für Störfestigkeitstests an integrierten Schaltungen MSc. S. Miropolsky, Prof. Dr.-Ing. S. Frei, AG Bordsysteme, TU Dortmund, Germany 1 Einleitung Aufgrund der wachsenden Komplexität elektronischer Systeme in einem Kraftfahrzeug wird die Systemzuverlässigkeit immer wichtiger. Die elektromagnetische Störfestigkeit ist in der Kfz-Elektronik von einem besonderen Interesse. Mehrere Testmethoden für die Charakterisierung der IC-Störfestigkeit (z.B. Direct Power Injection (DPI) [1] und Bulk Current Injection (BCI) [2,3]) sind standardisiert. Innerhalb der IC-Entwicklungsphase werden oft Simulationen verwendet, um Testergebnisse im Voraus zu ermitteln und mögliche Designprobleme zu vermeiden. Dafür sind spezielle Simulationsmodelle der Messaufbauten notwendig. Während für BCI genaue Modelle vorhanden sind [5,6], fehlen diese besonders für hohe Frequenzen bei der Bordnetznachbildung (BNN). RF Injection DC Supply Artificial Network DC Feed Cable Harness IC VBAT DUT RF Sink BCI Injection Clamp Abb. 1: Beispiel-Blockdiagram des Bulk Current Injection Testaufbaus VDC to DC source DC Supply Path LDCFeed 5.0µΗ VRF to cable harness RF Signal Path CRF 0.1µF VMeas Rdischarge 50 kΩ Abb. 2: Standardisierte Struktur der Bordnetznachbildung 50 Ω t CDC 1.0µF Die BNN, eng. "Artificial Network", die z.B. in [3], [4] beschrieben ist, wird für Kfz-EMV-Untersuchungen unter anderem für Störfestigkeitstests von Komponenten herangezogen, um die Impedanz eines Kfz-Versorgungsnetzes nachzubilden. Obwohl die Eigenschaften der BNN nur bis 108 MHz spezifiziert sind, wird sie dennoch in den verschiedenen Anwendungen oft im Frequenzbereich bis 1 GHz oder sogar höher eingesetzt. Der standardisierte Schaltkreis der BNN wird in Abb. 2 dargestellt. 1.1 Zielsetzung der Arbeit Für virtuelle Störfestigkeitsuntersuchungen ist ein geeignetes Simulationsmodell der verwendeten BNN notwendig. Im niedrigeren Frequenzbereich kann ein solches Modell durch einen einfachen, äquivalenten Schaltkreis dargestellt werden. Im nicht spezifizierten höheren Frequenzbereich treten bei realen BNN mehrere Resonanzen auf. Wegen einer schnell ansteigenden Anzahl an Modellparametern ist eine physikalische Ersatzschaltbildmodellierung nicht mehr möglich. Im höheren Frequenzbereich werden auf Messdaten basierende Verhaltensmodelle verwendet. Diese Black-Box-Modelle werden über die gemessenen S- oder YParameter charakterisiert und in Schaltungssimulatoren eingesetzt. Der Anwendungsbereich dieser Modelle wird nur durch den gemessenen Frequenzbereich limitiert. In dieser Arbeit wird ein Verfahren vorgestellt, welches eine schnelle und effiziente Modellierung von BNN im Frequenzbereich bis 1 GHz erlaubt. 2 2.1 Ersatzschaltbild Messtechnische Charakterisierung Die Bordnetznachbildung wurde mit einem Netzwerk Analysator (Agilent E5071B) charakterisiert. Die Port-Anordnung ist in Abb. 3 dargestellt. Die Messung wurde von 300 KHz bis 1 GHz durchgeführt. Die wichtigsten Parameter zur Charakterisierung der BNN sind: • die Eingangsimpedanz am RF-Anschluss (P1) (S11); • die Transmission zwischen dem RF- (P1) und dem Messanschluss (P2) (S21) • die Transmission zwischen dem RF- (P1) und DC-Anschluss (P3) (S31) S31: Damping between RF and DC ports Die gemessene Eingangsimpedanz an P3 P1 dem RF-Anschluss ist in Abb. 5 S11: dargestellt. Der erwartete Wert von ca. S21: Reflection Signal Transfer at RF port 50 Ω wird bis 108 MHz beobachtet. between RF port and Meas. port Aufgrund von parasitären Effekten und P2 Resonanzerscheinungen treten ab einer Frequenz von 108 MHz Abweichungen auf. Ein ähnliches Verhalten wird z.B. bei der Signalübertragung zwischen dem RFAbb. 3: Port-Anordnung in der Messung und Messanschluss beobachtet (siehe Abb. 6). Im Bereich bis 108 MHz liegt der Wert des S21-Parameters nahe bei 0 dBm, was die komplette Signalübertragung von dem RF-Anschluss zu dem Messanschluss bedeutet. Bei höheren Frequenzen wird die Signalübertragung durch Resonanzen gestört. Die Ergebnisse zeigen, dass die verwendete BNN den EMV-Normen, welche das Verhalten nur bis 108 MHz vorschreiben, entspricht. Wenn dieses Gerät in dem Testaufbau bis 1 GHz eingesetzt wird, und das Simulationsmodell eines gesamten Aufbaus erstellt wird, müssen die Hochfrequenzeigenschaften auch im Modell berücksichtigt werden. 2.2 Ersatzschaltbild im spezifizierten Frequenzbereich Die parasitären Eigenschaften der Bauelemente müssen im Modell berücksichtigt werden. Der äquivalente Widerstand ESR und die äquivalente Induktivität ESL der realen Kapazitäten werden aus den gemessenen Kurven berechnet. Die Hochfrequenzeigenschaften von der 5 µH-Spule werden vereinfacht durch parallele Widerstände und Kapazitäten abgebildet. Die Werte werden über die Anpassung des simulierten S31-Verlaufs an die gemessenen Daten gewonnen. Die Eigenschaften der Anschlüsse werden auch mit äquivalenten Bauelementen im Modell berücksichtigt. VDC to DC source LP3 20 nH VRF to cable harness RDC0 100 mΩ CDC 100 nF LDC1 2.15 µH CDC1 0.1 pF RDC1 1.5 kΩ LDC2 2.15 µH CDC2 7.0 pF RDC2 1.5 kΩ ESR 100 mΩ LP1 10 nH CRF 100 nF CP1 11 pF ESR 100 mΩ RLoss 1000 mΩ ESL 10 nH Vmeas to meas. port ESL 10 nH Rdischarge 50 kΩ LP2 10 nH Rport 50 Ω Abb. 4: Ersatzschaltbild der Bordnetznachbildung unter Berücksichtigung wichtiger parasitärer Eigenschaften Das auf diese Weise entstandene Modell zeigt eine gute Übereinstimmung von Messung und Simulation bei Frequenzen bis 108 MHz. Die Simulationsergebnisse sind in Abb. 5 und 6 dargestellt. Das Modell ist einfach zu implementieren und schnell zu simulieren. Eine Erweiterung des Modells auf 1 GHz ist jedoch nicht möglich, da die Anzahl an Schaltkreiselementen und Parametern, die betrachtet und angepasst werden müssen, mit Erhöhung der Frequenz erheblich zunimmt. Damit ist dieser Ansatz für eine Modellierung bei höheren Frequenzen nicht geeignet. 1 100 S11, Measurement 1 S11, Measurement 2 S11, Standard Circuit S11, Equivalent Circuit Model S-Parameter, abs() 0.8 0.7 90 80 Input Impedance, Ohm 0.9 0.6 0.5 0.4 0.3 70 60 50 40 30 0.2 20 0.1 10 0 5 10 10 6 7 10 Frequency, Hz 10 8 10 ZinRF, Measurement 1 ZinRF, Measurement 2 ZinRF, Standard Circuit ZinRF, Equivalent Circuit Model 0 5 10 9 10 6 7 10 Frequency, Hz 10 8 10 9 10 9 Abb. 5: Eingangsreflektion (S11, links) und Eingangsimpedanz (ZinRF rechts) Messung vs. ideales und erweitertes Ersatzschaltbild 5 0 0 -10 -5 S31, Measurement S31, Standard Circuit S31, Equivalent Circuit Model S-Parameter, dB S-Parameter, dB -20 -10 -15 -20 -25 -30 -40 -50 -30 S21, Measurement S21, Standard Circuit S21, Equivalent Circuit Model -35 -40 5 10 10 6 7 10 Frequency, Hz -60 10 8 10 9 -70 5 10 10 6 7 10 Frequency, Hz 10 8 Abb. 6: Signalübertragung zwischen dem RF- und Messanschluss (S21, links) und Signaldämpfung zwischen dem RF- und DC-Anschluss (S31, rechts) Messung vs. ideales und erweitertes Ersatzschaltbild 3 3.1 Erweitertes Modell Extrahierung der HF-Modellabweichung Die Abweichung des Modells von den Messdaten wird gezielt im Modell berücksichtigt. Dabei werden die gemessenen und simulierten S-Parameter in Y-Parameter umgerechnet und die Abweichung zwischen dem Modell und der Messung wird berechnet als dY = YMEAS – YMODEL (1) Physikalisch entspricht diese Abweichung einem fehlenden Stromanteil im Modell, welcher als Reaktion auf die vorgegebene Spannung zusätzlich auftreten sollte. Dieser Stromanteil wird im Modell parallel zu dem Hauptschaltkreis ergänzt, auf diese Weise kann eine gute Übereinstimmung zu der Messung erreicht werden. 0 -30 -10 -40 Y31, Measurement Y31, Equivalent Circuit Model dY31, Deviation -30 -40 Y-Parameter, dB Y-Parameter, dB -20 Y21, Measurement Y21, Equivalent Circuit Model dY21, Deviation -50 -60 -70 -50 -80 -60 -70 7 10 8 10 Frequency, Hz 10 9 -90 7 10 8 10 Frequency, Hz 10 9 Abb. 7: Modellabweichung über 100 MHz als Y-Parameter dargestellt Einige Simulationsprogramme können aus S-, Y- oder Z-Parametern Verhaltensmodelle im Frequenzbereich direkt erzeugen. Für Simulatoren, die diese Funktion nicht unterstützen, muss die berechnete Abweichung in eine geeignete Form gebracht werden. Das Modell in dem Frequenzbereich unter 100 MHz sollte dabei nicht gestört werden. Eine Bedingung dafür ist, dass die Y-Parameter der Modellabweichung unter der Grenzfrequenz von z.B. 100 MHz gegen Null streben Das kann durch eine Anpassung von Ersatzschaltbildparametern erreicht werden. Die Werte der Y-Parameter können auch unter 100 MHz direkt begrenzt werden. Unter dieser Bedingung, wenn nur die fehlenden Stromanteile im Modell berücksichtigt werden, wird nur das Modellverhalten über 100 MHz beeinflusst. 3.2 Vektor-Fitting und State-Space-Modellierung Eine Approximation der Y-Parameter kann mit Hilfe von einem in Matlab implementierten Vektor-Fitting-Algorithmus [7] erstellt werden. Die resultierende Approximation ist ein Zustandsraummodell des folgenden Typs: x' = A · x + B · v; i = C · x + D · v; (2) (3) wobei v ein Vektor der Portspannungen (Eingangsgrößen), i ein Vektor der Portströme (Ausgangsgrößen), x ein Vektor der internen Zustände und A, B, C, D die Koeffizientenmatrizen sind. Die Werte der Koeffizientenmatrizen A, B, C und D werden durch den Vektor-Fitting-Algorithmus geliefert. Dieses Modell kann als ein Ersatzschaltbild implementiert werden. Die internen XZustände werden mit den Spannungspegeln vxi an den Knoten xi nachgebildet. Die Größen vi, xi und ii wirken aufeinander über die R-, C- und G-Elemente. Ein BeispielSchaltkreis des Modells der zweiten Ordnung (zwei interne Zustände, x1 und x2) für ein Zweitor (v1, v2, i1 und i2) ist in Abb. 8 gezeigt. Für höhere Modellordnungen oder mehrere Tore steigt die Anzahl der Komponenten proportional an. vx1 v1 С=1.0 i1 R=1/a11 I=a12·vx2 I=a11·vx1 I=b11·v1 I=b12·v2 R=1/d11 I=d11·v1 I=d12·v2 I=c11·vx1 I=c12·vx2 Abb. 8: Beispiel-Ersatzschaltbild der State-Space-Annäherung a) State x1 wird als vx1 Spannung dargestellt b) Strom i1 und Spannung v1 -10 -20 -20 dY11, Deviation dY11, Vector Fitting -30 -40 Y-Parameter, dB Y-Parameter, dB -30 -40 -50 -60 dY21, Deviation dY31, Deviation dY21, Vector Fitting dY31, Vector Fitting -50 -60 -70 -80 -70 -90 -80 10 8 10 9 -100 10 Frequency, Hz 8 10 9 Frequency, Hz Abb. 9: Annäherung der Y-Parameter durch Vektor-Fitting 3.3 Kombiniertes Modell für hohe Frequenzen Die in Unterkapitel 2.3 beschriebene Abweichung des Modells wird mit dem in Unterkapitel 2.4 beschriebenen Verfahren approximiert und als Schaltbild implementiert. Die resultierenden Simulationskurven sind in Abb. 9 dargestellt. VDC VDC GND Initial Passive Equivalent Circuit VRF VRF Vmeas Vmeas VDC Y-param. deviation VRF above 100 MHz GND (approx. solution) Vmeas Abb. 10: Kombiniertes Modell für höhen Frequenzbereich Der erstellte HF-Modellanteil wird parallel zum vorher entwickelten passiven Ersatzschaltbild geschaltet (Abb. 10). Damit werden die fehlenden Stromanteile in dem Modell im Frequenzbereich über 100 MHz addiert, und eine gute Übereinstimmung bis 1 GHz erreicht. Die Simulationskurven des Gesamtmodells werden in Abb. 11 und 12 mit dem ersten Ersatzschaltbildmodell und den Messergebnissen verglichen. 1 100 S11, Measurement 1 S11, Measurement 2 S11, Equivalent Circuit Model S11, Final Model with HF-Correction S-Parameter, abs() 0.8 0.7 90 80 Input Impedance, Ohm 0.9 0.6 0.5 0.4 0.3 70 60 50 40 30 0.2 20 0.1 10 0 5 10 10 7 6 10 Frequency, Hz 10 8 10 0 5 10 9 ZinRF, Measurement 1 ZinRF, Measurement 2 ZinRF, Equivalent Circuit Model ZinRF, Final Model with HF-Correction 10 6 7 10 Frequency, Hz 10 8 10 9 Abb. 11: Eingangsreflektion (S11, links) und Eingangsimpedanz (ZinRF rechts) Gesamtes Modell vs. Ersatzschaltbild und Messung 5 0 0 -10 -5 S31, Measurement S31, Equivalent Circuit Model S31, Final Model with HF-Correction S-Parameter, dB S-Parameter, dB -20 -10 -15 -20 -25 -30 -40 -50 -30 -35 -40 5 10 S21, Measurement S21, Equivalent Circuit Model S21, Final Model with HF-Correction 10 6 7 10 Frequency, Hz -60 10 8 10 9 -70 5 10 10 6 7 10 Frequency, Hz 10 8 10 9 Abb. 12: Signalübertragung zwischen dem RF- und Messanschluss (S21, links) und Signaldämpfung zwischen dem RF- und DC-Anschluss (S31, rechts) Gesamtes Modell vs. Ersatzschaltbild und Messung Eine gute Übereinstimmung zwischen Simulation und Messung kann in dem gesamten Frequenzbereich beobachtet werden. Der Einfluss der HF-Korrektur auf das Modellverhalten im Frequenzbereich unter 100 MHz ist gering. Aufgrund des benutzten numerischen Verfahrens, das eine Passivität des Modells erzwingt, kann es in Einzelfällen möglich sein, dass kein ergänzendes Modell gefunden werden kann. Die Probleme können vermieden werden, wenn der zu approximierende Datensatz passives Verhalten aufweist. 4 Zusammenfassung Ein Verfahren für die Modellierung einer passiven Schaltung im Frequenzbereich von DC bis 1 GHz wurde am Beispiel einer Bordnetznachbildung beschrieben. Hierbei wird zunächst ein Ersatzschaltbild für den niedrigen Frequenzbereich erstellt. Das komplexere Resonanzverhalten im Hochfrequenzbereich, das durch Messungen bestimmt wurde, kann mit einer weiteren Schaltung ergänzt werden. Diese Schaltung wird durch numerische Approximation eines Verhaltensmodells bestimmt. Aus der Kombination des Ersatzschaltbilds mit dem Verhaltensmodell entsteht das Gesamtmodell. Dieses Modell funktioniert im Zeit- und Frequenzbereich. Die Simulationsergebnisse zeigen eine gute Übereinstimmung mit den Messdaten im betrachteten Frequenzbereich. Das entwickelte Modell kann beispielsweise in virtuellen Störfestigkeitstests verwendet werden. Die genaue Modellierung der Übertragungsfunktionen und der Eingangsimpedanz im Hochfrequenzbereich erhöht die Genauigkeit des Modells des gesamten Testaufbaus und erhöht deutlich die Zuverlässigkeit der virtuellen Störfestigkeitstests. Literatur [1] IEC 62132-4: ICs - Measurement of EM immunity, part 4: Direct Power Injection. [2] IEC 62132-3: ICs - Measurement of EM immunity, part 3: Bulk Current Injection [3] ISO 11452-4: Road vehicles – Component test methods for electrical disturbances from narrowband radiated electromagnetic energy, part 4: BCI [4] CISPR 25: Radio disturbance characteristics for the protection of receivers limits and methods of measurement [5] M. F. Sultan, "Modeling of a Bulk Current Injection Setup for Susceptibility Threshold Measurements", IEEE Int. Symp. on EMC Proc., 1986 [6] S. Miropolsky, S. Frei, J. Frensch, Modeling of Bulk Current Injection Setups for Virtual Automotive IC Tests, EMC Europe 2011, Wroclaw, Poland [7] B. Gustavsen and A. Semlyen, "Rational approximation of frequency domain responses by Vector Fitting", IEEE Trans. Power Delivery, vol. 14, no. 3, pp. 1052-1061, July 1999.