Aufbau eines -Messstandes zur Untersuchung von Strahlenschäden
Werbung

Diplomarbeit
Aufbau eines
β -Messstandes
zur
Untersuchung von Strahlenschäden an
Silizium -Sensoren
Henning Kröhnke
23. Mai 2012
Universität Hamburg
Fakultät für Mathematik, Informatik und Naturwissenschaften
Fachbereich Physik
Institut für Experimentalphysik
Kurzbeschreibung
Im Rahmen dieser Diplomarbeit sind der Aufbau, die Kalibrierung und die Software eines
Messstandes zur genauen Untersuchung der Ladungssammelezienz von Pad -Sensoren
für die Signale von minimal ionisierenden Teilchen (MIP) realisiert. Die absolute Genauigkeit für die Messung der Signale beträgt 0,4 %. Das Rauschen der Ausleseelektronik
beträgt etwa 600 e− . Messungen lassen sich bis zu einem maximalen Sensorstrom von
100 µA in dem Temperaturbereich von −20 ◦ C bis +20 ◦ C durchführen. Die Temperatur
der Auageäche wird dabei innerhalb von 0,01 K stabil eingehalten.
Die Kalibrierung des Messstandes ist mit zwei unabhängigen Methoden durchgeführt.
Für die eine Methode werden Testsignale durch einen Signalgenerator erzeugt, für die
andere Methode wird die 60 keV -Linie einer 241 Am -Quelle benutzt. Beide Kalibrierungen stimmen mit einer Genauigkeit von 0,7 % überein.
Durch eine Simulation des Triggers für die benutzte 90 Sr -Quelle wird gezeigt, dass der
wahrscheinlichste Wert für die im Sensor deponierte Energie um nur 5 % von dem Wert
für ideale MIPs abweicht. Erste Ergebnisse zeigen die Durchführbarkeit von Messungen
an ungeschädigten als auch an geschädigten Silizium -Sensoren bis zu einer neutronenäquivalenten Fluenz von 1 · 1015 neq/cm2 .
Abstract
As part of this thesis a probe station has been built, calibrated and the control and
analysis software implemented to investigate the charge collection eciency of pad sensors with signals of minimum ionizing particles (MIP). The absolute accuracy for the
signal measurements is 0.4 % and the noise of the readout electronics is about 600 e− .
Measurements are performable up to a current of 100 µA in the temperature range from
−20 ◦ C to +20 ◦ C. The temperature of the chuck is maintained stable within 0.01 K.
The calibration of the probe station is done by two independent methods. For one method test signals are provided by a pulse generator, for the other method the 60 keV line
of an 241 Am source is used. Both calibrations agree within 0.7 %.
A trigger-simulation for the used 90 Sr source shows that the most probable value of the
deposited energy in the sensor for triggered events diers only by 5 % of the value given
by ideal MIPs.
First results show the feasibility of measurements with unirradiated sensors and sensors
irradiated up to a neutron equivalent uence of 1 · 1015 neq/cm2 .
3
4
Inhaltsverzeichnis
1
2
3
4
5
6
Einleitung
7
Theoretische Grundlagen
2.1
2.2
2.3
2.4
2.5
Halbleiter . . . . . . . . . . . . .
Silizium -Einkristall -Herstellung .
Dotierung . . . . . . . . . . . . .
p-n -Übergang . . . . . . . . . . .
Silizium -Sensoren . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4.1 Signalverlauf . . . . . . . . . . . . . . . . . . . . . . .
4.2 Rauschen . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Kalibrierung . . . . . . . . . . . . . . . . . . . . . . . .
4.3.1 Elektronischer Kanal . . . . . . . . . . . . . . .
4.3.2 Physikalische Kalibrierung . . . . . . . . . . . .
4.3.3 Eektive Eingangskapazität des Vorverstärkers
4.4 Software . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.1 BetaControl . . . . . . . . . . . . . . . . . . . .
4.4.2 BetaAnalysis . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Aufbaubeschreibung
3.1
3.2
3.3
3.4
3.5
Konzept . . . . . . . .
Überblick . . . . . . .
Mechanischer Aufbau
β -Strahlenquelle . . .
Elektronik . . . . . . .
3.5.1 Trigger . . . .
3.5.2 Vorverstärker .
3.5.3 Shaper . . . . .
3.5.4 ADC . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Inbetriebnahme
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
9
9
10
11
11
12
15
15
16
17
19
20
20
23
26
26
29
29
30
33
34
43
47
50
50
58
Messungen
63
Zusammenfassung und Ausblick
71
5.1 Durchführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.2 Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Abbildungsverzeichnis
75
5
Inhaltsverzeichnis
Tabellenverzeichnis
79
Literaturverzeichnis
81
6
1 Einleitung
Der CERN (Conseil Européen pour la Recherche Nucléaire) bei Genf ist die Europäische
Organisation für Kernforschung. Am CERN bendet sich ein 26,7 km langer, ringförmiger Teilchenbeschleuniger, der LHC (Large Hadron Collider). In ihm können Protonen
gegenläug beschleunigt werden und an speziellen Punkten zur Kollision gebracht werden. An einem dieser Punkte bendet sich der CMS -Detektor (Compact Muon Solenoid). Der CMS -Detektor ist zwiebelförmig aufgebaut, wobei die inneren zwei Lagen aus
Silizium -Pixel - und Steifensensoren bestehen. Diese Silizium -Sensoren altern unter der
Strahlenbelastung, so dass die Pixel -Sensoren, welche die innerste Lage bilden, bereits
nach den ersten fünf Betriebsjahren ausgetauscht werden müssen. Für etwa das Jahr 2022
gibt es Ausbaupläne für den LHC, welche die Luminosität um den Faktor 10 verbessern
sollen. Diese Ausbaustufe des LHC s läuft unter der Bezeichnung High Luminosity Large
Hadron Collider oder kurz HL LHC.
Durch die Erhöhung der Luminosität kommt eine höhere Strahlenbelastung auf die Silizium -Sensoren zu und deren Betriebszeit reduziert sich stark. Um die Austauschintervalle
in etwa beizubehalten ist es notwendig, die Strahlenhärte der Silizium -Sensoren zu steigern.
Problemstellung
Ziel dieser Diplomarbeit ist der Aufbau und die Inbetriebnahme eines β -Messstandes zur
Untersuchung von Silizium -Sensoren. Mit dieser Messapparatur sollen Silizium-Sensoren
im Rahmen der CEC -Messkampagne (Central European Consortium) untersucht werden. Insbesondere sollen die Pulshöhen von Silizium -Flächendioden beim Durchgang von
minimal ionisierenden Teilchen als Funktion der an den Sensor angelegten Spannung, der
Temperatur und der Strahlenschädigung untersucht werden. Damit sollen unter anderem die verschiedenen Sensoren der CEC -Messkampagne charakterisiert werden, mit
dem Ziel, Sensoren zu entwickeln, die der Strahlenbelastung am HL LHC standhalten.
Im Detektorlabor des Instituts für Experimentalphysik der Universität Hamburg benden sich bereits mehrere Laser -Messstände. Um insbesondere den Nachteil der nicht
genauen Kenntnis über die im Sensor deponierte Ladung des Lasers zu vermeiden und
versuchstechnisch näher am vorgesehenen Einsatzbereich der Sensoren zu sein, werden
β -Teilchen benutzt. Die Energie der benutzten β -Teilchen wird so gewählt, dass sie als
minimal ionisierende Teilchen angesehen werden können. Das Rauschen der Elektronik
muss daher genügend klein sein, um die resultierenden schwachen Signale gut auswerten
7
1 Einleitung
zu können. Die Anforderungen, denen der Messstand weiterhin genügen soll, sind eine
genaue Temperaturregulierung des Sensors im Bereich von −20 ◦ C bis +20 ◦ C, eine Begasung mit Trockenluft sowie ein lichtundurchlässiges Gehäuse.
Teil des Messstandes ist die Signal -Ausleseelektronik und ein PC samt Auslese - und
Analysesoftware.
8
2 Theoretische Grundlagen
2.1 Halbleiter
Als Halbleiter werden Kristalle von Materialien bezeichnet, die aufgrund ihrer Bandstruktur eine Zwischenposition zwischen Isolatoren und Metallen einnehmen, wie in Abb.
2.1 dargestellt. Wie bei den Isolatoren bendet sich eine Bandlücke zwischen dem Valenzund Leitungsband, diese ist aber bei den Halbleitern kleiner. Allgemein gelten Materialien, deren Bandlücke EG . 4 eV betragen, als Halbleiter, wobei die 4 eV eine willkürliche
Wahl sind.
Bei Metallen hingegen ist das Leitungsband entweder teilweise gefüllt oder das Valenzund Leitungsband überlappen sich. Dadurch können sich die Elektronen quasifrei bewegen und es resultiert ihre gute elektrische Leitfähigkeit. Durch Zufuhr von Energie,
z.B. durch optische oder thermische Anregung, können Elektronen die Bandlücke im
Halbleiter überwinden. Dadurch füllt sich nicht nur das Leitungsband mit Elektronen
sondern im Valenzband verbleiben Löcher mit einer eektiv positiven Ladung. Die quasifreien positiven und negativen Ladungsträger im Valenz - und Leitungsband sorgen mit
zunehmender Anzahl für eine Erhöhung der elektrischen Leitfähigkeit, diese bleibt aber
unter der von Metallen. Es wird zwischen den Elementhalbleitern, die nur aus einem
Element des Periodensystems bestehen, und den Verbindungshalbleitern unterschieden.
Im Rahmen dieser Diplomarbeit sind nur Silizium-Halbleiter von Bedeutung, die zu den
Elementhalbleitern zählen. [Dem05]
Abbildung 2.1: Dargestellt sind die Energiebänder eines Isolators, Halbleiters und Metalls. Der Isolator weist die gröÿte Bandlücke auf, gefolgt von dem Halbleiter. Bei Metallen ist das Leitungsband teilweise gefüllt.
9
2 Theoretische Grundlagen
2.2 Silizium -Einkristall -Herstellung
Für die Herstellung der meisten elektronischen Bauteile auf Silizium -Basis ist es erforderlich, ein hochreines Ausgangsmaterial zu benutzen. Die gängigsten Verfahren sind das
Czochralski -Verfahren und das Zonenschmelzverfahren.
Beim Czochralski -Verfahren wird Quarz SiO2 in einem Schmelztiegel geschmolzen. In
die entstandene Schmelze können z.B. Phosphor oder Bohr eingebracht werden, um ein
n - oder p - Typ Siliziumkristall zu erhalten. Um das Wachstum des Einkristalls einzuleiten, wird ein Impfkristall in die Schmelze eingebracht und langsam wieder herausgezogen.
Die Siliziumatome aus der Schmelze lagern sich schichtweise an dem Impfkristall an und
übernehmen seine Gitterorientierung. Zum besseren Kontrollieren des Übergangs aus der
Schmelze in den Kristall wird der Impfkristall rotierend aus der Schmelze gezogen. Beim
magnetischen Czochralski -Verfahren bendet sich die gesamte Apparatur zusätzlich in
einem einstellbaren magnetischen Feld. Mit diesem magnetischen Feld ist es möglich, die
Turbulenzen in der Schmelze zu dämpfen und dadurch eine höhere Reinheit zu erzielen.
Ausgangspunkt für das Zonenschmelzverfahren ist ein polykristalliner Siliziumstab. Dieser wird durch eine Induktionsheizung lokal zum Schmelzen gebracht und ebenfalls mit
einem Impfkristall in Verbindung gebracht. Die Induktionsheizung wandert den gesamten Siliziumstab entlang, dieser rotiert um seine Achse, um eine gleichmäÿige Schmelze
zu erzielen. Beim Erstarren der Schmelze wird wieder die Orientierung des Impfkristalls
übernommen und der Einkristall entsteht. Vorhandene Verunreinigungen im Siliziumstab sammeln sich in der Schmelze und konzentrieren sich am Ende des Stabes. Durch
ein wiederholtes Durchführen des Zonenschmelzverfahrens erhöht sich die Reinheit des
Einkristalls. [Föl12]
Abbildung 2.2: Die Abbildung zeigt das Bänderschema bei dotierten Halbleitern. [Lau11]
10
2.3 Dotierung
2.3 Dotierung
Unter Dotierung wird das gezielte Einbringen von Fremdatomen in einen Halbleiter bezeichnet. Durch diese Fremdatome ändern sich die elektrischen Eigenschaften der Halbleiter. Das Einbringen von Fremdatomen in den Halbleiterkristall sorgt für zusätzliche
Energieniveaus in dem Banddiagramm des Halbleiters. Es wird zwischen der n - und der
p - Dotierung unterschieden. Bei der n - Dotierung werden Elemente in den Halbleiter
eingebracht, die eine höhere Anzahl von Valenzelektronen besitzen als das Element des
Wirtkristalls. Diese zusätzlichen erlaubten Zustände in der Bandlücke werden Donatoren
genannt. Bei der p - Dotierung hingegen werden Atome in den Wirtkristall eingebracht,
welche mindestens ein Valenzelektron weniger besitzen. Diese Zustände werden als Akzeptoren bezeichnet. Die Energieniveaus liegen für Silizium typischer Weise ∼ 40 meV
über dem Valenzband bzw. unter dem Leitungsband, diese Energie ist gegenüber der
Bandlücke von 1,12 eV sehr gering. Dadurch reichen bereits tiefe Temperaturen, um
ein Elektron von einem Donatorniveau in das Leitungsband anzuregen bzw. aus dem
Valenzband in ein Akzeptorniveau anzuregen. Durch diese Übergänge erhöht sich die
Konzentration der Ladungsträger in den beiden Bändern und damit die Leitfähigkeit
des Halbleiterkristalls. [Föl12] [Lau11]
2.4 p-n -Übergang
Die in Abb 2.3 gezeigte Struktur wird als p -n -Übergang bezeichnet. Sie besteht aus
einem p - dotierten Halbleiter, an den sich unmittelbar ein n - dotierter Halbleiter anschlieÿt. Durch diese Struktur herrscht anfangs eine stufenförmige Verteilungsfunktion
der Elektronen im n - Typ und der Löcher im p - Typ. Der starke Konzentrationsgradient
bewirkt eine Diusionsbewegung der Elektronen und Löcher. Dieser Diusionsbewegung wirkt ein zunehmend stärker werdendes elektrisches Feld entgegen, welches sich
im n - Bereich durch die zurückbleibenden positiven Atomrümpfe der Donatoren und im
p - Bereich durch die negativ geladenen Akzeptoren ausbildet. Dieses Gebiet wird als
Raumladungszone bezeichnet. Die Diusionsbewegung und die Drift der Elektronen und
Löcher aufgrund des elektrischen Feldes heben sich im thermischen Gleichgewicht auf.
Die Gröÿe der Raumladungszone, die auch als Sperrschicht bezeichnet wird, kann durch
Anlegen einer äuÿeren Spannung sowohl vergröÿert als auch verkleinert werden. Wenn
die Spannung so gewählt wird, dass die Raumladungszone immer kleiner wird, geht der
Halbleiter letztlich in den leitenden Zustand über. Es wird dann von einer in Durchlassrichtung betriebenen Diode gesprochen. Bei einer in Sperrrichtung betriebenen Diode ist
die Spannung entgegengesetzt gewählt. Mit steigender Spannung breitet sich die Raumladungszone über die gesamte Diode aus. Die Spannung, die benötigt wird um die gesamte
Diode zu verarmen, hängt von der Konzentration der Dotieratome ab. In der folgenden
Gleichung ist der Zusammenhang dargestellt.
UDep =
q0
|Nef f |d2 .
20
(2.1)
11
2 Theoretische Grundlagen
Abbildung 2.3: Darstellung des p-n -Übergangs [Wik11a]
Hierbei entspricht q0 der Elementarladung, 0 entspricht der elektrische Feldkonstante
und ist mit 11,9 die Dielektrizitätskonstante für Silizium. d ist die Dicke der Diode und
Nef f = ND − NA die eektive Dotierungskonzentration. [Lut99] [Föl12]
2.5 Silizium -Sensoren
Silizium -Halbleitersensoren bestehen im Wesentlichen aus einem p-n - Übergang, an den
in Sperrrichtung eine Spannung angelegt wird. Das elektrische Feld in der Verarmungszone sorgt dafür, dass sich die dort aufhaltenden freien Ladungsträger zu den Kontakten
bewegen. Wenn nun ionisierende Strahlung in den aktiven Bereich des Sensors einfällt
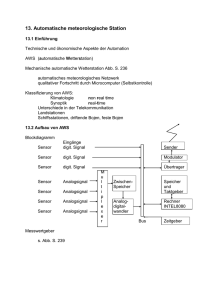
und Elektronen-Loch-Paare erzeugt, werden diese im Feld getrennt, driften zu den Kontakten und erzeugen so einen Signalpuls. Diese Signale können durch geeignete Elektronik verstärkt und ausgelesen werden. Abb. 2.4 zeigt ein Foto von zwei unterschiedlich
groÿen Pad -Sensoren der CEC -Messkampagne. Der kleine Sensor wurde an nur drei
Seiten auf Gröÿe geschnitten, somit ist das groÿe, schwarze Quadrat unterhalb des klei-
12
2.5 Silizium -Sensoren
nen Sensors übriggebliebenes Wafermaterial. Nähere Informationen über die Sensoren
der CEC -Messkampagne nden sich z.B. in [Erf11].
Abbildung 2.4: Die Abbildung zeigt einen groÿen und einen kleinen Pad -Sensor der
CEC -Messkampagne. Der kleine Sensor wurde nur an drei Seiten auf
Maÿ geschnitten.
13
2 Theoretische Grundlagen
14
3 Aufbaubeschreibung
3.1 Konzept
Das Hauptinteresse liegt bei der Ladungssammelezienz von Pad -Sensoren aus verschiedenen Silizium -Materialien in Abhängigkeit von der Bestrahlungsdosis, der Temperatur
und der angelegten Hochspannung. Es gibt verschiedene Möglichkeiten, Signale in den
Sensoren zu erzeugen, z.B. mit Licht oder mit elektrisch geladenen Teilchen. In diesem
Messstand wird für die Signalerzeugung β -Strahlung benutzt, welche von einer 90 Sr Quelle emittiert wird. Um aus dem Spektrum der β -Teilchen solche auszuwählen, die als
minimal ionisierende Teilchen (MIPs) angesehen werden können, wird eine Koinzidenz
Abbildung 3.1: Prinzip des β -Messstandes: die β -Teilchen treten aus der 90 Sr -Quelle
aus und treen kollimiert auf den Sensor. Die Triggerauswahl wird unter
Verwendung zweier Szintillatorzähler getroen.
15
3 Aufbaubeschreibung
der Signale von zwei Szintillatorzählern zum Triggern benutzt. In Abb. 3.1 ist das Prinzip des Messaufbaus skizziert. Durch den Kollimator treen die β -Teilchen senkrecht auf
den Sensor, durchdringen ihn und danach beide Szintillatorzähler. Die Szintillatorzähler
sind jeweils 3 mm dick. Dadurch gelangen fast ausschlieÿlich β -Teilchen aus dem hoch
energetischen Teil des Spektrums in den zweiten Szintillatorzähler und erzeugen dort
Lichtblitze beim Durchqueren. Die niederenergetischen β -Teilchen werden zum Groÿteil schon im ersten Szintillatorzähler gestoppt. In Abschnitt 3.5.1 wird näher auf die
Triggerauswahl eingegangen.
3.2 Überblick
Der β -Messstand lässt sich in vier Bereiche aufteilen. Dazu gehört der mechanische Aufbau, die β -Quelle, die Elektronik und die Software. Auf die Software wird näher in Abschnitt 4.4 eingegangen. Auf die anderen drei Bereiche wird in den folgenden Abschnitten
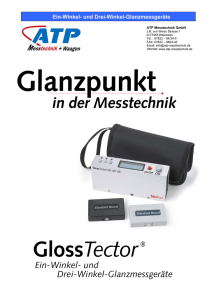
eingegangen. Abb. 3.2 zeigt ein Foto des β -Messstandes. Im linken Bereich des Fotos ist
das Rack zu sehen, in dem ein Groÿteil der Elektronik untergebracht ist. Rechts an dem
Abbildung 3.2: Foto des Versuchsstands. Mittig auf dem Tisch bendet sich der mechanische Aufbau, links im Rack ein Groÿteil der Elektronik, unter dem
Tisch das Kühlsystem und die Vakuumpumpe, rechts der PC.
16
3.3 Mechanischer Aufbau
Rack ist das Ventil für die Regulierung der Trockenluft angebracht. Auf dem Tisch steht
der mechanische Aufbau mit dem links daneben liegenden Deckel. In dem schwarzen,
länglichen Kästchen, das sich in dem mit Kupferfolie ausgekleideten Deckel bendet,
sind die Szintillatorzähler des Triggers untergebracht. Über dem mechanischen Aufbau
bendet sich das schwenkbare Zoom -Stereomikroskop SZ51 von Olympus [Oly12]. Zwischen dem mechanischen Aufbau und dem Standfuÿ des Mikroskops bendet sich der
Shaper in einem mit Kupferfolie beklebten Gehäuse. Rechts im Bild ist der PC zu sehen.
Unter dem Tisch steht das Kühlsystem und rechts davon das kleine, grüne Gehäuse der
Vakuumpumpe.
3.3 Mechanischer Aufbau
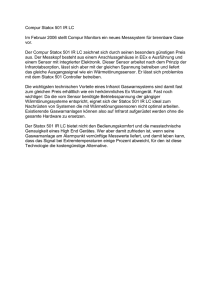
Abb. 3.3 zeigt den, in den Werkstätten der Physikalischen Institute der Universität
Hamburg gefertigten, mechanischen Aufbau des β -Messstandes. In Abb. 3.4 ist zusätz-
Abbildung 3.3: AutoCAD-Zeichnung des mechanischen Aufbaus [Sch11]
17
3 Aufbaubeschreibung
Abbildung 3.4: AutoCAD-Querschnittzeichnung des mechanischen Aufbaus [Sch11]
lich noch ein Querschnitt gezeigt. Die Auageäche des Sensors ist aus einem goldbeschichteten Kupferblock gefertigt. In dessen Mitte bendet sich eine vertikale Bohrung,
die sich in den darunterliegenden Komponenten fortsetzt und bis zur Strahlungsquelle
reicht. Rings um diese Bohrung herum bendet sich in der Auageäche eine Nut. In dieser Nut mündet eine horizontale Bohrung. An diese Bohrung ist ein Unterdruckschlauch
angeschlossen, der durch eine Durchführung in der Rückwand nach drauÿen geführt wird
und an die Vakuumpumpe angeschlossen ist. Der Unterdruck unter dem Sensor sorgt für
einen guten elektrischen Kontakt und allgemein eine Fixierung des Sensors. In der Nähe
der Düse am Rand der Auageäche bendet sich eine gefräste Nut mit zwei Bohrungen.
In die Nut ist ein Pt100 Thermoelement von JUMO [JUM12] eingelassen und mittels
Schrauben in den Bohrungen gesichert. An der anderen Ecke der Auageäche sind
zwei kleine Bohrungen zu sehen. In diese Bohrungen sind zwei kleine Stifte eingelötet.
Über die Stifte wird die Auageäche mit der Hochspannungsquelle verbunden. Unterhalb der Kupferauageäche bendet sich ein Peltier-Element, mit dem die Temperatur
der Auageäche sehr genau auf einem gewünschten Wert gehalten werden kann. Die
Hauptwärmezu- und -abfuhr erfolgt hierbei durch den darunter bendlichen Kupferträger. Dieser ist mit Bohrungen versehen, durch welche Kühlüssigkeit des Lauda RE 1050
[LAU12] gepumpt wird. Unter dem Kupferträger bendet sich die bewegliche Quellenhalterung; es sind zwei Positionen für diese vorgesehen. Bei der ersten Position bendet
sich die Quelle direkt unter der Bohrung des Kollimators, durch welche die emittierten Elektronen auf den Sensor zuiegen. Die zweite Position dient zur Abschirmung der
Strahlung. Hierfür wird die Quellenhalterung seitwärts bewegt, so dass sich die Quelle komplett unter dem Kupferträger bendet. Der Kupferträger und die Wandung der
Quellenhalterung sind ausreichend stark dimensioniert, um die β -Strahlung vollständig
zu absorbieren. Die den Versuchsaufbau verlassende γ -Strahlung ist sehr gering und be-
18
3.4
β -Strahlenquelle
nötigt keinerlei weitere Abschirmung.
Um die Intensität der Bestrahlung variieren zu können, bendet sich im Boden der Quellenhalterung eine Verstellschraube, mit der die Höhe, also der Abstand zwischen Quelle
und Sensor, eingestellt werden kann.
Um elektrische Isolation zu gewährleisten, erfolgt die Fixierung der Auageäche und
des Peltier -Elements mittels eines Kunststorahmens auf dem Kupferträger. Die beiden
Kontaktächen des Peltier-Elements bestehen aus Keramik und gewährleisten dadurch
die elektrische Isolation.
Seitlich an dem Kupferträger ist eine Düse aus Aluminium angebracht, durch die der
Sensor begast werden kann, z.B. mit Sticksto oder Trockenluft, um den Sensor zu trocknen.
Der Rückkontakt des Sensors erfolgt durch die vergoldete Auageäche. Die Sensorkontaktierung erfolgt durch eine Nadel, die direkt mit der Leiterplatine des Vorverstärkers
verbunden ist. Die Leiterplatine kann in horizontaler und vertikaler Richtung durch Lineartische verfahren werden. Damit können die Sensoren in Verbindung mit dem Mikroskop
verlässlich kontaktiert werden.
Die Kontaktierung des Guard Ring ist zur Zeit noch nicht vorgesehen, kann aber nachträglich realisiert werden.
Um unerwünschte Lichteinüsse zu vermeiden, bendet sich der gesamte mechanische
Aufbau in einem lichtundurchlässigen PVC -Gehäuse. Die Durchführungen der Kabel
und Schläuche sind ebenfalls lichtundurchlässig gestaltet. Die Bodenplatte, die Rückwand mit Durchführungen sowie der Deckel wurden nachträglich zur Rauschreduzierung
mit Kupferfolie ausgekleidet. In dem Deckel ist das Gehäuse der Triggerzähler so angebracht, dass sich sein Einlassfenster ca. 3 cm entfernt mittig über der Sensorauage
bendet.
3.4
β -Strahlenquelle
Für den Messstand wird ein Strontium-Präparat benutzt, um die β -Strahlen zu erhalten. Die Quelle hat eine Aktivität von etwa 37 MBq. In Abb. 3.1 ist die zylindrische
Quelle mit einer Länge von 10 mm und einem Durchmesser von 2 mm dargestellt. Das
radioaktive Material bendet sich in Kugelform gepresst, von Aluminiumfolie eingehüllt
an der Spitze der Quelle. Zum mechanischen Schutz schlieÿt die Quelle mit einem 50 µm
starken Edelstahldeckel ab. Strontium gehört zu den Erdalkalimetallen und hat die Ordnungszahl 38. Das relevante Isotop ist das 90 Sr. Es entsteht innerhalb weniger Minuten
nach einer Kernspaltung von z.B. 235 U durch gegebenenfalls mehrfachen β -Zerfall von
Spaltprodukten der Massenzahl 90 , die bei etwa 5 % solcher Spaltungen entstehen. Die
Halbwertzeit von 90 Sr beträgt 28,5 Jahre. Es zerfällt durch β -Zerfall in 90 Y mit einer
Zerfallsenergie von 0,546 MeV. 90 Y hat eine Halbwertzeit von 64 Stunden und zerfällt
mit einer Zerfallsenergie von 2,280 MeV ebenfalls durch β -Zerfall in das stabile 90 Zr.
[Dev85] [Wik11b]
Das Spektrum der β -Quelle ist in Abb 3.5 durch die schwarze Kurve dargestellt. Dieses
Spektrum ist das Ergebnis einer Simulation, die im Rahmen eines internen Papiers durch-
19
3 Aufbaubeschreibung
geführt wurde [Sch10b]. In der Simulation sind die Wechselwirkungen der emittierten
Elektronen mit den Atomen innerhalb der Quelle, der dünnen einhüllenden Aluminiumfolie und dem aus 50 µm starken Edelstahl bestehenden Verschlussdeckel berücksichtigt.
Das scharfe Maximum bei etwa 0,125 MeV entsteht durch den 90 Sr -Zerfall. Der weniger intensive, höher energetische Teil des Spektrums kommt durch den Zerfall des 90 Y
zustande.
3.5 Elektronik
Die für den β -Messstand benutzte Elektronik besteht zum einen Teil aus gekauften
Komplettsystemen und zum anderen aus selbst gebauten Komponenten. Zu den selbstgebauten Komponenten gehört der Vorverstärker, der die Signale des Sensors verstärkt
und der Shaper, in dem die Signale geformt werden. Der Vorverstärker wird in Abschnitt
3.5.2, der Shaper in Abschnitt 3.5.3 beschrieben. Diese Komponenten wurden von Wolfgang Lange DESY -Zeuthen entwickelt. Ebenso ist der Trigger selbst gebaut und wurde
auch am DESY -Zeuthen entwickelt. Dessen Prinzip und Aufbau sind in Abschnitt 3.5.1
beschrieben. Von den gekauften Komplettsystemen wird weiter unten auf den Analog Digital -Wandler V265 von C.A.E.N. [C.A12c] näher eingegangen. Weitere Geräte sind
das Keithley 6517B [Kei12b], das für die Hochspannungsversorgung und die Sensorstrommessung benutzt wird. Für die Temperaturreglung wird als Kühlsystem das RE
1050 von Lauda [LAU12] benutzt, die Temperaturmessung geschieht mit dem Keithley
2700 [Kei12a] und einem Pt100 -Thermofühler von JUMO [JUM12]. Das genaue Regeln
der Temperatur erfolgt durch das Peltier -Element PE-125-14-15HS von Telemeter Electronic [Tel12] in Verbindung mit der Stromversorgung ZUP 20-10 von TDK -Lambda
[TDK12] und einer 8 -fach -Relaiskarte von Conrad Electronic [Con12].
Für die Gate - und Testsignalerzeugung sowie allgemein die Signalverarbeitung werden
unter anderem der Pulsgenerator 81104A von Hewlett -Packard [Hew12b], zwei Dual
Timer Mod. N93B von C.A.E.N. [C.A12a] sowie der 8 -Kanal -Diskriminator Mod. N96
von C.A.E.N. [C.A12b], die Koinzidenzeinheit LRS Model 465 von LeCroy [LeC12b] und
die Linear Fan-In/Fan-Out -Einheit Model 428F von LeCroy [LeC12a] benutzt. Zur Signaljustierung wird das Zweikanaloszilloskop TDS 220 von Tektronix [Tek12] genutzt.
3.5.1 Trigger
Da die Ankunftszeiten der β -Teilchen am Sensor zeitlich zufällig verteilt sind, wird ein
System benötigt, das den Zeitpunkt bestimmt, bei dem der ADC mit der Ladungsintegration beginnt. Wie in Abschnitt 3.4 beschrieben, treten aus der Quelle β -Teilchen
aus, deren Energien der in Abb. 3.5 dargestellten Verteilung entsprechen. Diese Teilchen
treen durch die Bohrung des Kupferträgers senkrecht auf den Sensor. Die dabei in dem
Sensor deponierte Energie hängt von der Energie der β -Teilchen ab. Wie in [BGK10] beschrieben können nur die β -Teilchen der 90 Sr -Quelle mit der höchsten Energie als MIPs
20
3.5 Elektronik
Abbildung 3.5: Die schwarze, gepunktete Linie stellt das Spektrum aller β -Teilchen dar,
die aus der Quelle austreten und auf den Sensor auftreen. Die darunter
liegende grüne Linie entspricht dem Spektrum der β -Teilchen, die den
Sensor verlassen und auf den ersten Szintillatorzähler treen. Die gelbe
Fläche unter der blauen Linie zeigt mit einem Faktor 50 multipliziert das
Spektrum auf das getriggert wird. [Sch10b]
angesehen werden. Da mit dem Messstand Studien über die Detektionseigenschaften von
Silizium -Sensoren mit Hilfe von MIPs durchgeführt werden sollen, ist es notwendig, genau diese Ereignisse aus der Gesamtmenge aller Ereignisse auszuwählen. Der Groÿteil
der auf den Sensor auftreenden β -Teilchen erzeugt also Signale, die nicht von Interesse
sind.
Zur Auswahl der Signale, die durch MIPs erzeugt werden, wird ein Trigger benutzt,
wie er in [Sch10b] und [Sch10a] beschrieben wird. In dem Triggergehäuse benden sich
ein rundes Einlassfenster von 25 mm Durchmesser und ein Auslassfenster von 16 mm
Durchmesser. Beide Fenster sind aus schwarzem Fotopapier mit einer ächenbezogenen Masse von 100 g/m2 gefertigt. Zwischen diesen beiden Fenstern benden sich zwei
3 mm starke Szintillatorzähler (NE110) mit 19,8 mm und 17,8 mm Durchmesser. Beide
21
3 Aufbaubeschreibung
Szintillatorzähler sind in eine jeweils 3 mm dicke Plexiglasplatte eingefasst, welche die
Lichtblitze der Szintillatorzähler zu den Photomultipliern leiten. Um eine gegenseitige
Störung der beiden Szintillatorzähler durch ihre Lichtblitze zu vermeiden, sind sie jeweils
samt des Plexiglases in weiÿem Papier mit einer ächenbezogenen Masse von 80 g/m2
eingeschlagen. Bei dem Photomultiplier handelt es sich um das Modell R5900-03-M4
der Firma Hamamatsu [Ham12]. Er besitzt vier unabhängige Kanäle, von denen sich
jeweils zwei parallel zur Stirnseite einer der beiden Plexiglasplatten benden. Die jeweiligen Ausgänge sind miteinander verbunden, so dass eektiv nur zwei unabhängige
Kanäle benutzt werden. Die Spannung, die für die Photomultiplier benötigt wird, stellt
Abbildung 3.6: Die schwarze, gepunktete Linie stellt das Spektrum aller β -Teilchen dar,
die aus der Quelle austreten und auf den Sensor auftreen. Die gelbe
Fläche unter der blauen Linie stellt das Spektrum der β -Teilchen dar,
auf die getriggert wird. Die rote, gestrichelte Linie stellt zum Vergleich
das Spektrum von Myonen mit einem Impuls von 0,37 GeV/c dar. Bei
diesem Impuls können die Myonen als ideale MIPs angesehen werden.
Die Abweichung der getriggerten β -Teilchen von diesem idealen MIP Spektrum beträgt etwa 5 %. [Sch10b]
22
3.5 Elektronik
die Hochspannungsquelle TC 952 von Tennelec [Ten83] zur Verfügung. Sie ist in dem
NIM -Baugruppenträger untergebracht ist. Bei einer angelegten Spannung von −830 V
beträgt die mittlere Amplitude der Triggersignale 100 mV, dieses ist so gewollt, um den
Schwellwert des Diskriminators bei 50 mV zu belassen.
In Abb. 3.5 ist mit der gepunkteten, schwarzen Linie das Spektrum der β -Teilchen dargestellt, welche die Quelle verlassen und auf den Sensor treen. Die darunter liegende
grüne Linie stellt das Spektrum der β -Teilchen dar, welche einen 320 µm starken Silizium -Sensor durchdringen und auf den ersten Szintillatorzähler treen. Die gelbe Fläche
unter der roten Linie stellt mit einem Faktor 50 multipliziert das Spektrums der β Teilchen dar, auf deren Signale getriggert wird. Der blau eingezeichnete Pfeil deutet an,
dass β -Teilchen in Silizium als ideale MIPs angesehen werden können, wenn sie eine
Energie von etwa 1,3 MeV besitzen. Die Abweichung des Mittelwertes der getriggerten
β -Teilchen von diesem Pfeil ist in Abb. 3.6 noch mal deutlicher dargestellt. Dort stellt
die gepunktete, schwarze Linie wieder das Spektrum aller Elektronen dar, die auf den
Sensor auftreen. Die gelbe Fläche unter der blauen Linie entspricht den β -Teilchen,
auf die getriggert wird. Die gestrichelte, rote Linie stellt das Spektrum von Myonen
mit einem Impuls von 0,37 GeV/c dar. Diese können als ideale MIPs angesehen werden.
Die Abweichung der wahrscheinlichsten Energie der getriggerten β -Teilchen von der der
Myonen beträgt etwa 5 %. Die Maximalwerte der Spektren sind in dieser Abbildung auf
eins normiert.
3.5.2 Vorverstärker
Das Herzstück des Vorverstärkers besteht aus dem Chip A250F von AMPTEK [Amp12].
Dabei handelt es sich um einen ladungsempndlichen Vorverstärker. Wenn der zu untersuchende Sensor auf der vergoldeten Auageäche liegt und mit der Nadel kontaktiert ist,
ergibt sich ein Schaltbild wie in Abb. 3.7. An die beiden Kontakte oben links im Schaltbild BIAS und BIAS_return wird die Hochspannung mit dem Keithley 6517B [Kei12b]
angelegt, die zur Verarmung des Sensors benutzt wird. Der linke BIAS -Kontakt ist mit
der vergoldeten Auageäche verbunden, der IN -Kontakt ist mit dem Pad des Sensors
über die Kontaktnadel Standard Mini Blade Style J von Wentworth Laboratories [Wen]
verbunden. Die Spannungsversorgung der Anschlüsse VDD und VSS erfolgt durch das
Labornetzteil E3630A der Firma Hewlett -Packard [Hew12a].
Im Falle eines ungeschädigten Pad -Sensors sorgt eine ausreichend groÿ gewählte Hochspannung für eine vollständige Verarmung des Sensors. Aufgrund des groÿen Widerstandes des Sensors können die Widerstände R2 und R5 vernachlässigt werden. In diesem
Fall fällt die gesamte Hochspannung über dem Sensor ab, wobei der Leckstrom durch
den Sensor vernachlässigt werden kann. Wenn nun ein MIP den Sensor durchdringt, werden typischer Weise 22 000 Elektron -Loch -Paare entlang der MIP -Spur in einem 300 µm
dicken Sensor erzeugt [Spi10]. Die positiven und negativen Ladungsträger bewegen sich
aufgrund des elektrischen Feldes zu den entsprechenden Sensorkontakten und erzeugen
einen Strompuls mit einer Dauer von einigen Nanosekunden. In Abb. 3.7 ist beispielhaft
ein n -Typ -Sensor kontaktiert. Die entstandenen Elektronen bewegen sich aufgrund des
elektrischen Feldes zu dem Pluspol der an BIAS angeschlossenen Hochspannungsquelle.
23
3 Aufbaubeschreibung
Abbildung 3.7: Schaltplan des Vorverstärkers mit kontaktiertem n -Typ -Sensor
Der in Abb. 3.7 gezeigte Vorverstärker A250F funktioniert wie ein invertierender Integrator. An seinem Ausgang baut sich eine Spannung auf, die der in dem Eingang gesammelten Ladung proportional ist. Diese Spannung fällt durch eine interne RC -Kopplung
exponentiell ab.
Bei einem geschädigten Pad -Sensor fällt, durch den mit der Schädigung und der angelegten Hochspannung steigenden Sensorstrom, eine zunehmend gröÿere Spannung über den
Widerständen R2 und R5 ab. Ein Verkleinern dieser Widerstände würde den Spannungsabfall reduzieren, gleichzeitig aber auch die Bandbreite des Vorverstärkers vergröÿern
und so zu einem gröÿeren Rauschen führen. Der Spannungsabfall durch ein Vergröÿern
der Widerstände, kann bei der Auswertung berücksichtigt und korrigiert werden, mit
zunehmender Gröÿe der Widerstände wird ihr thermisches Rauschen aber gröÿer. Eine
genaue Beschreibung der Ausleseelektronik für Halbleiter -Sensoren ist in [Spi05] zu nden.
Im linken unteren Teil der Abb. 3.7 bendet sich die Schaltung, die zur Kalibrierung der
Elektronik benutzt wird, siehe dazu Abschnitt 4.3. Für die Kalibrierung wird der Kontakt Calibr oben links mit dem IN -Anschluss verbunden, an dem auch die Kontaktnadel
angeschlossen ist. Der Masseanschluss unten links wird mit der Masse GND verbunden.
Auf der anderen Seite werden Masse - und Pulse -Anschluss mit dem Signalgenerator
verbunden.
24
3.5 Elektronik
Abbildung 3.8: Schaltplan des Shapers
25
3 Aufbaubeschreibung
3.5.3 Shaper
Das Schaltbild des Shapers ist in Abb. 3.8 dargestellt. Der Shaper besteht aus einem
invertierenden und einem nicht invertierenden Verstärker. Beide sind jeweils durch
den Mikrochip AD8038AR von Analog Devices [Ana12] realisiert. Der invertierende
Ausgang ist auf dem Shaper -Gehäuse mit einem (−) -Symbol gekennzeichnet, der nicht
invertierende Ausgand durch ein (+) -Symbol. Der Eingang des Shapers wird mit dem
Ausgang des Vorverstärkers verbunden. Das Signal am Ausgang des Vorverstärker lädt
den Kondensator C6 auf. Der invertierende Verstärker verstärkt durch die Gegenkopplung mit seinem Ausgang die vor dem Widerstand R5 liegende Spannung bezüglich 0 V,
gemäÿ folgender Gleichung:
Ua = vUe
(3.1)
In dieser Gleichung steht Ua für die Ausgangsspannung, Ue für die Eingangsspannung
R9
und v = − R5
entspricht der Verstärkung mit R9 = 4,7 kΩ und R5 = 470 Ω, also dem
minus Zehnfachen.
Der nicht invertierende Verstärker verstärkt ähnlich wie der invertierende Verstärker die
Spannung, die an seinem nicht invertierenden Eingang liegt bezüglich 0 V. Dabei verändert sich aber die Polarität des Ausgangssignals bezüglich des Eingangsignals nicht. Die
Ausgangsspannung ergibt sich ebenfalls nach Gleichung 3.1, die Verstärkung ergibt sich
aber nach v = 1 + R14
R19 mit R14 = 4,3 kΩ und R19 = 470 Ω zu plus 10,15.
Die Spannungsversorgung des Shapers geschieht ebenfalls durch das Labornetzteil
E3630A der Firma Hewlett -Packard [Hew12a]. Die Feinjustierung der Nullniveaus der
beiden Ausgänge über die Potentiometer R15 und R20, sowie die Widerstände R18
und R10, ist zu Gunsten der Rauschreduzierung abgeschaltet. Dies ist möglich, da der
ADC kapazitiv mit dem Shaper gekoppelt ist. Durch das Formen ist die gesamte Signal Information in der Amplitudenhöhe des geformten Signals enthalten.
3.5.4 ADC
Der Analog -Digital -Wandler Mod. V265 der Firma C.A.E.N. [C.A12c] ist in dem Überrahmen VME Mini Crate 195 der Firma WIENER Plein & Baus [WIE12] untergebracht.
Dieser stellt ein VME -Bus-Stecksystem (Versa Module Eurocard -Bus) zur Verfügung
[Wik12]. Über diesen VME -Bus ndet die Kommunikation mit dem sich ebenfalls in dem
Überrahmen bendlichen VM -USB -Modul der Firma WIENER Plein & Baus [WIE09]
statt. Dieses Modul fungiert als VME -Busmaster und ist über einen USB 2.0 Port mit
dem PC verbunden.
Der Analog -Digital -Wandler besitzt acht unabhängige Kanäle, die jeweils ein AC gekoppeltes -Eingangssignal in einen 16 -bit -Wert umwandeln können. Dazu wird für jeden Kanal die gesammelte Ladung durch einen Ladungsverstärker (Ladungs -Spannungs Wandler) in einen Spannungswert übersetzt. Der Ladungsintegrationsprozess startet etwa 65 ns nachdem am GATE -Eingang das Signal WAHR anliegt und endet sobald am
26
3.5 Elektronik
-Eingang der Wert FALSCH anliegt. Der jeweils bei der Ladungsintegration erzeugte Spannungswert wird durch einen Analog -Digital -Wandler in einen 12 -bit -Wert
übersetzt. Diese 12 -bit -Analog -Digital -Umwandlungswerte werden zusammen mit den
Kanalidentizierungen und den ADC -RANGE -Werten in 16 -bit -Werte geschrieben.
Diese werden in einem FIFO -Speicher abgelegt und können über den VME -Bus ausgelesen werden und gelangen weiter über die USB 2.0 Verbindung zum PC.
GATE
27
3 Aufbaubeschreibung
28
4 Inbetriebnahme
4.1 Signalverlauf
Abbildung 4.1: Dargestellt ist der Signalverlauf des β -Messstandes. Im unteren Bereich
bendet sich die Elektronik zur Testsignalerzeugung. Für die Kalibrierung des elektronischen Kanals und den normalen Messbetrieb mit β Quelle wird das Signal nicht durch die Linea -fan -out -Einheit geführt,
dies ist durch die rote gestrichelte Linie angedeutet. Die Linea -fan -out Einheit wird bei der physikalischen Kalibrierung benutzt, um auf das
Signal selbst zu Triggern.
In Abb. 4.1 ist das Schaltbild des β -Messstandes dargestellt. Wie in [Sch10b] beschrieben, ist durch die Geometrie des Messtisches, die Dicke der Si -Sensoren und der TriggerGeometrie gewährleistet, dass lediglich Elektronen aus dem hochenergetischen Teil des
Elektronenspektrums ein Trigger-Ereignis auslösen. Diese Elektronen mit etwa 1,3 MeV
können als MIPs angesehen werden [BGK10]. Wie dort beschrieben ist die Energie, die
MIPs beim Durchqueren des Si -Sensors durch Ionisierung verlieren, durch eine Landau Verteilung vorhergesagt. Die Elektron -Loch -Paare, die entlang der Teilchenspur entstehen, driften aufgrund des elektrischen Feldes in der Verarmungszone zu den Kontakten.
Das von ihnen erzeugte Signal wird zuerst durch den Vorverstärker und dann weiter im
Shaper verstärkt und geformt.
Abhängig davon, ob das Signal aus einem p - oder n -Typ -Sensor ausgelesen wird, wird
29
4 Inbetriebnahme
entsprechend der invertierende oder der nicht invertierende Ausgang des Shapers benutzt. Das heiÿt, zum Messen eines n -Typ -Sensors wird der nicht invertierende Ausgang
benutzt und für p - Typ -Sensoren entsprechend der invertierende Ausgang. Dies ist zu
beachten, da der ADC nur negative Signale verarbeiten kann. Die Verzögerungsleitung
(Delay), die zum Verzögern des Signals relativ zum Gate -Signal dient, wird im Messbetrieb und für die Kalibrierung des elektronischen Kanals direkt mit dem Ausgang des
Shapers verbunden. Dies ist durch die rote, gestrichelte Linie in Abb. 4.1 angedeutet.
Wenn ein MIP der Quelle den Sensor durchquert hat, wird es aufgrund der geometrischen Anordnung des Triggers mit groÿer Wahrscheinlichkeit die beiden Szintillatorzähler durchdringen. Die dabei entstehenden Lichtblitze werden mit zwei Photomultipliern
in elektrische Signale umgewandelt. Diese analogen Signale erzeugen, wenn sie einen
Schwellwert überschreiten, im Diskriminator jeweils ein NIM -Signal. Anschlieÿend werden sie in der Koinzidenz -Einheit auf zeitlichen Überlapp überprüft. Im Fall des Überlapps wird ein Startsignal an einen von zwei Dual -Timern gegeben. Diese erzeugen dann
das Gate -Signal, in dem der ADC mit der Ladungssammlung beginnt.
Für die Kalibrierung des elektronischen Kanals wird die β -Quelle entfernt. Der Pulsgenerator im unteren Bereich von Abb. 4.1 wird zur Testsignalerzeugung und zum Triggern
des Gategenerators benutzt. Die Kalibrierung des elektronischen Kanals wird in Abschnitt 4.3.1 beschrieben.
Bei der physikalischen Kalibrierung wird zwischen dem Shaper und der Verzögerungsleitung eine Linear Fan-In/Fan-Out -Einheit geschaltet. Diese dient dazu, um auf das
Signal selbst triggern zu können. Die physikalische Kalibrierung wird in Abschnitt 4.3.2
beschrieben.
Da der ADC frühestens 65 ns nach dem Beginn des Gate -Signals das analoge Signal
verarbeiten kann, muss das Timing beachtet werden, wenn immer das komplette Signal
aufgenommen werden soll. Als Faustregel kann mit 5 ns Verzögerung pro Meter Koaxialkabel gerechnet werden, dies entspricht etwa 2/3 c. Um das Timing der Signale einzustellen, wird das Gate -Signal und das Signal des Sensors in ein Zweikanal -Oszilloskop
gegeben. Damit misst man den Zeitunterschied zwischen den Startzeitpunkten beider
Signale. Durch die Länge der Verzögerungsleitung kann dieser Zeitunterschied so beeinusst werden, dass die 65 ns eingehalten werden.
4.2 Rauschen
Das Rauschen der Elektronik besteht im Wesentlichen aus dem thermischen Rauschen
und dem Schrotrauschen. Das Signal -Rausch -Verhältnis kann direkt durch die Länge
des Gate -Signals beeinusst werden. Durch ein kurzes Gate -Signal wird von dem ADC
weniger Rauschen integriert, allerdings auch weniger vom Signal. Mit einem zu langen
Gate -Signal lässt sich zwar das gesamte Signal aufnehmen, allerdings wird das integrierte Rauschen zunehmend störender. Um ein gutes und stabiles Signal -Rausch -Verhältnis
für die Messungen mit dem invertierenden und dem nicht invertierenden Kanal einzustellen, wird wie folgt vorgegangen. Der Messstand wird in den Kalibrierungsmodus wie in
Abschnitt 4.1 beschrieben gebracht, wobei der Ausgang des Signalgenerators anfangs aus-
30
4.2 Rauschen
geschaltet bleibt. Nun wird die Pedestalverteilung in Abhängigkeit der Gate -Signallänge
mit dem ADC aufgenommen. Die Länge des Gate -Signals wird dabei mit dem Oszilloskop ermittelt. Die Standardabweichung des gauÿförmigen Pedestals entspricht dem
Rauschen der Elektronik. Diese Messung entspricht den roten Punkten in Abb. 4.2,
oben für den nicht invertierenden Kanal, unten für den invertierenden Kanal. Wie erwartet steigt das Rauschen mit der Wurzel der Länge des Gate -Signals an.
Abbildung 4.2: Aufgetragen sind das Rauschen als rote Punkte und Signal -Rausch Verhältnis als blaue Vierecke in Abhängigkeit von der Gate -Signallänge.
Oben benden sich die Messungen mit dem nicht invertierenden Kanal,
unten mit dem invertierenden Kanal.
31
4 Inbetriebnahme
Anschlieÿend wird der Ausgang des Signalgenerators angeschaltet und so die Testladung periodisch in den Sensor eingebracht. Nun wird ebenfalls dieses Signal in Abhängigkeit der Gate -Signallänge mit der ADC aufgenommen. Die Dierenz zwischen dem
wahrscheinlichsten Wert des Signals und dem Mittelwert des Pedestals für jeweils die
gleiche Gate -Signallänge entspricht der gesammelten Ladung in ADC -Einheiten. In Abschnitt 5.1 sind typische Verteilungen des Pedestals und Signals abgebildet. Das Teilen
dieses Wertes durch den entsprechenden Wert des Rauschens ergibt das Signal -Rausch Verhältnis. In Abb.4.2 ist für beide Kanäle sowohl das Signal -Rausch -Verhältnis als
auch das Rauschen an sich in Abhängigkeit von der Gate -Signallänge aufgetragen. Der
Signalgenerator wurde dafür so eingestellt, dass der Puls 100 ns nach dem Beginn des
Gate -Signals startet. Es wurde eine Kombination von Abschwächern benutzt, bestehend aus der 25 dB Stufe der variablen Abschwächungseinheit BMA-35110 von Trilithic Broadband Instruments [Tri12] und zwei koaxialen Abschwächern mit zusammen
41,4 dB. Damit ergab sich für den invertierenden Kanal eine Signalamplitude von 68 mV.
Die Signalanstiegszeit nach der Integrierung durch den Shaper betrug 96 ns. Für den
nicht invertierenden Kanal ergab sich eine Signalamplitude von 62 mV und eine Anstiegszeit von 108 ns.
Abbildung 4.3: Die Abbildung zeigt den Screenshot des Oszilloskops. Zu sehen ist die relative Position des Gate -Signals zum Signal. Die horizontale Einheit pro
Kästchen entspricht 100 ns, vertikal entspricht sie 10 mV pro Kästchen.
Aus dem Verlauf der blauen SNR -Messpunkte (signal/noise ratio), die das Signal Rausch -Verhältnis abbilden, bietet es sich auf den ersten Blick an, eine Gate -Signallänge
von etwa 400 ns zu wählen. So wäre das maximale Verhältnis zwischen Signal und Rauschen eingestellt und das Gesamtrauschen der Elektronik würde etwa 800 e− betragen.
Dabei ergibt sich allerdings ein Problem. In Abb. 4.3 ist ein Bildschirmfoto vom Oszilloskop abgebildet, auf dem das vom Shaper geformte Signal und ein 600 ns langes
Gate -Signal zu sehen sind. Das Gate -Signal ist zur Verdeutlichung durch die rote Linie
nachgezogen. Ein weiteres Verkürzen des 400 ns langen Gatesignals, dies ist durch die
32
4.3 Kalibrierung
rot gestrichelte Linie angedeutet, würde zu einem starken Abfallen des Signal -Rausch Verhältnisses führen. Siehe dazu Abb. 4.2. So ein Verkürzen würde sich eektiv auch
dann ergeben, wenn das Signal relativ zum Gate -Signal später anfängt. Dass heiÿt, dass
beim 400 ns langen Gate -Signal die Zeitabstimmung zwischen dem Signal und dem Gate Signal kritisch wird. Kleine Veränderungen in der Signalführung können groÿen Einuss
auf Signal -Rausch -Verhältnis haben. Um dieser Problematik für den Anfang auszuweichen, wird eine Gate -Signallänge von 600 ns gewählt, was zu einem Gesamtrauschen der
Elektronik von etwa 1000 e− führt. Dies reduziert zwar das Signal -Rausch -Verhältnis von
etwa 33 auf etwa 31 , aber der Arbeitspunkt bendet sich in einem stabileren Bereich.
So führen kleine Änderungen in der Zeitabstimmung zu einer nur unwesentlichen Änderung im Signal -Rausch -Verhältnis. Diese gewonnene Flexibilität in der Zeitabstimmung
erleichtert das anfängliche Vorgehen beim Aufbau und Kalibrieren des β -Messstandes.
Die Signalamplituden der benutzten Testladung übersteigen die Signalamplituden, die
typischerweise beim Durchqueren eines MIPs entstehen um das etwa 1,7 -fache. Daher
wird das Signal -Rausch -Verhältnis im Messbetrieb mit etwa 18 geringer ausfallen, allerdings bleibt die prinzipielle Abhängigkeit von der Gate -Signallänge bestehen. In Kapitel
5 wird auf die Verbesserung des Signal -Rausch -Verhältnisses durch eine Änderung der
Gate -Signallänge und relativen Position zum Signal eingegangen.
Eine genaue Beschreibung des Rauschens von Elektronik ist in [Spi05] zu nden.
4.3 Kalibrierung
Um mit diesem Messstand Studien über das Verhalten von geschädigten und nicht geschädigten Si -Sensoren durchführen zu können, muss der Zusammenhang zwischen dem
im Sensor entstehenden und dem im ADC gemessenen Signal bekannt sein. Die Kalibrierung des Messstandes muss prinzipiell vier Sachverhalte klären. Erstens muss der Pedestal für den ADC bekannt sein und seine Stabilität unter gleich bleibenden Bedingungen
gewährleistet sein. Unter dem Pedestal versteht man den gemessenen ADC -Mittelwert,
der sich ergibt, wenn kein Eingangssignal anliegt. Für diese Messungen wird das Gate -Signal zufällig vorgegeben. Zweitens muss für mindestens eine bekannte Anzahl von
Elektron -Loch -Paaren im Sensor der entsprechende ADC -Wert bekannt sein. Drittens
muss das Verhältnis von Elektronen pro einer ADC -Einheit bekannt sein und viertens
muss bekannt sein, ob der Zusammenhang von ADC -Kanal und im Zähler deponierter
Ladung linear ist.
Für die Kalibrierung wird eine Kombination aus zwei verschiedenen Verfahren benutzt.
Das erste Verfahren zielt auf die Ausleseelektronik ab, den s.g. elektronischen Kanal.
Darunter versteht man alle elektronischen Bauteile, die das Signal auf dem Weg vom
Sensor zum ADC beeinussen, siehe Abb. 4.1. Hierbei wird vor allem das Verhältnis
der Elektronen pro ADC -Einheit ermittelt und überprüft, ob die Signalverarbeitung
einschlieÿlich des ADCs linear verläuft. Auÿerdem kann die eektive Eingangskapazität
des Vorverstärkers ermittelt werden. Damit lässt sich prinzipiell auch die exakte, in den
Vorverstärker eingebrachte Ladungsmenge berechnen und somit die absolute Ladungsmenge für einen bestimmten ADC -Wert festlegen.
33
4 Inbetriebnahme
Das zweite Verfahren wird hier als physikalische Kalibrierung bezeichnet. Dabei trit
ein γ -Quant mit sehr genau bekannter Energie auf ein Elektron im Sensor. Dieses Elektron erhält den Impuls und die Energie des Photons und schlägt weitere Elektronen
aus, so dass schlieÿlich die gesamte Energie des γ -Quants für die Produktion von Elektron -Loch -Paaren aufgebraucht ist. Durch die Kenntnis der Energie für die Produktion
eines Elektron -Loch -Paares lässt sich die Anzahl an entstandenen Elektronen berechnen.
Diese liegt bei etwa 16 000 Elektronen für Silizium. Unter der Annahme einer hundertprozentigen Ladungssammelezienz kann man die Anzahl der entstandenen Elektronen
mit dem entsprechenden ADC -Wert verknüpfen. Zum Vergleich werden beim Durchgang eines minimal ionisierenden Teilchens durch einen 300 µm dicken Silizium -Sensor
durchschnittlich 22 000 Elektronen erzeugt [Spi10].
4.3.1 Elektronischer Kanal
Um eine hohe Präzision der eigentlichen Kalibrierung zu erzielen, ist es notwendig, die
für die Kalibrierung benutzten Bauteile und Instrumente zu untersuchen. Die Kapazität
des Kalibrierungskondensators Cref in Abb. 4.1, mit dem die Testladung eingebracht
wird, wird vom Hersteller mit einer Genauigkeit von 1 % zu 10 pF angegeben. Die
Genauigkeit des für die Messung der Signalhöhen benutzten Oszilloskops hängt von der
gewählten Auösung ab. Der Fehler in der Spannungsmessung wird zum halben Wert der
entsprechenden Skaleneinteilung abgeschätzt. In Tabelle 4.1 sind diese Fehler dargestellt.
Auösung in mV/Einheit Skaleneinteilung in mV Fehler in mV
200
8
4
100
4
2
50
2
1
20
0,8
0,4
10
0,4
0,2
5
0,2
0,1
Tabelle 4.1: Messfehler des Oszilloskopes
Es ist vorteilhaft, die für die Kalibrierung benötigte Signalabschwächung durch eine
Kombination von Abschwächungsstufen zu erzielen. Damit umgeht man die schwierige
Vermessung von hohen Abschwächungen. Die für diese Kalibrierung benutzte Kombination besteht aus zwei koaxialen Abschwächern mit nominal 20 dB und der variablen
Abschwächungseinheit BMA-35110 von Trilithic Broadband Instruments [Tri12], die in
1 dB -Schritten von 0 dB -110 dB einstellbar ist. Die beiden koaxialen Abschwächer sind
nicht die selben, wie die in Abschnitt 4.2 benutzten.
Die Abschwächung ist notwendig, da der Generator nicht in der Lage ist, Spannungen
von 1 mV und weniger präzise genug zu liefern. Diese geringen Spannungen sind aber
notwendig, um Ladungen in den Kalibrierungskondensator Cref einzubringen, die in der
gleichen Gröÿenordnung sind wie die später gesammelte Ladung beim Durchdringen ei-
34
4.3 Kalibrierung
nes MIPs durch einen Silizium -Sensor. Um die Genauigkeit der koaxialen Abschwächer
zu überprüfen, wird ein 1 V -Signal an diese angelegt und die abgeschwächte Spannung
mit dem Oszilloskop gemessen. Anhand von Gleichung (4.1) kann die Abschwächung
ermittelt werden, hierbei ist LU die Abschwächung in dB, U0 die Referenzspannung und
U die gemessene Spannung hinter dem Abschwächungsglied. Die vom Oszilloskop gemessene Referenzspannung ohne Abschwächungsglieder beträgt in diesem Fall 992 mV, da
sich durch die benutzte Kabellänge eine zusätzliche Abschwächung ergibt. Als Schätzwert
für das richtige Spannungsniveau wird der Mittelwert U0 = 0,996 ± 0,004 V zwischen
dem eingestellten und dem gemessenen Spannungsniveau gewählt. Die in diesem Aufbau benutzten 20 dB Abschwächer führen einzeln zu einer Spannung von 103,2 mV bzw.
104 mV. Gemeinsam ergeben sie eine Spannung von 10,8 mV. Daraus ergeben sich Abschwächungen von 19,6 dB ± 0,6 %, 19,7 dB ± 0,6 % und 39,3 dB ± 0,5 % bei beiden
gemeinsam. Die Fehler ergeben sich wieder durch die Hälfte der Skaleneinteilung des
Oszilloskops, diese beträgt 0,8 mV bei 20 mV / Einheit und 0,2 mV bei 5 mV / Einheit.
Die Gesamtabschwächung ergibt sich durch die Kombination der drei Messungen nach
Gleichung (4.2) und der Fehler dafür ergibt sich nach Gleichung (4.3).
U
· 20
U0
LU 1 + LU 2 + LU 3
=
2
q
LU = − log10
LGesamt
∆LGesamt =
∆L2U 1 + ∆L2U 2 + ∆L2U 3
2
(4.1)
(4.2)
(4.3)
Die einzelnen Stufen der variablen Abschwächungseinheit BMA-35110 sind vom Hersteller mit einer Genauigkeit von ± 0,25 dB bzw. 1,5 % angegeben, je nachdem was gröÿer
ist. Die Präzision dieses Messstandes erlaubt es aber, eine Korrektur der einzelnen Stufen vorzunehmen, wodurch der systematische Fehler deutlich gesenkt werden kann. Auf
diese Korrektur wird weiter unten eingegangen.
Die Kalibrierung wird für jeden der beiden Kanäle viermal durchgeführt, einmal ohne
dass ein Sensor kontaktiert ist, zweimal mit einem kontaktierten Saphir -Sensor und einmal mit dem Silizium -Sensor CC1325. Die Kontaktierung unterschiedlicher Kapazitäten
dient später zur Bestimmung der eektive Eingangskapazität des Vorverstärkers. Die
zweite Kalibrierung mit dem Saphir -Sensor wird mit einem anderen Spannungsniveau
des Signalgenerators durchgeführt, um die systematische Abweichung, die durch die
variable Abschwächungseinheit entsteht, zu verdeutlichen. Bei der Kalibrierung besteht
das prinzipielle Problem, dass die drei Kapazitäten Cdet , Cstray und Cinp parallel geschaltet sind, siehe Abb. 4.4. Das führt dazu, dass die in den Kalibrierungskondensator
Cref eingebrachte Ladung nicht komplett vom Vorverstärker gesammelt wird. Die effektive Eingangskapazität des Vorverstärkers Cef f = Cstray + Cinp kann nicht direkt
gemessen werden. Die Kapazität Cref = 10 pF ± 1 % ist bekannt, die durch den Sensor
resultierende Kapazität Cdet lässt sich messen. Dazu eignet sich z.B. ein sogenannter
C/V −I/V -Messstand. Durch Kenntnis der beiden Kapazitäten Cref und Cdet lässt sich
Cef f bestimmen, dieses wird in Abschnitt 4.3.3 beschrieben. Mit Kenntnis der eektiven
Eingangskapazität lässt sich eine vollständige Kalibrierung der Elektronik vornehmen.
35
4 Inbetriebnahme
Allerdings ist es schwierig diese kleinen Kapazitäten sehr genau zu bestimmen, was
einen Vergleich mit einer physikalischen Kalibrierung nötig macht. Dieser Vergleich ist
in Abschnitt 4.3.2 beschrieben.
Abbildung 4.4: Schaltung der Kapazitäten bei der Kalibrierung
Zum Durchführen der Kalibrierung wird der Messstand, wie in Abb. 4.1 gezeigt und in
Abschnitt 4.1 beschrieben, umgebaut. Am Signalgenerator werden die folgenden Einstellungen vorgenommen, abhängig davon, ob der invertierende (−) oder der nicht invertierende (+) Kanal kalibriert werden soll.
Signalspannungsniveau 1 V
Signalgenerator Modus
Normal
bei (+) oder Complement bei (−)
Signalfrequenz 50 Hz
Signaldauer 3 µs
Vor dem Durchführen der Kalibrierungen muss zuerst mit einem Oszilloskop überprüft
werden, ob das Signal für die Kalibrierung frühestens 65 ns nach Beginn des Gate Signals beim ADC ankommt. Es besteht jedoch auch die Möglichkeit, diese 65 ns zu
unterschreiten, um eine Verbesserung des Signal -zu -Rauschen -Verhältnisses zu erzielen;
hierauf wird in dieser Arbeit nicht im Detail eingegangen. Das Kalibrierungssignal entsteht dadurch, dass das angelegte Rechtecksignal durch die RC -Schaltung dierenziert
wird, wie in Abb. 4.5 angedeutet.
Durch das Kalibrierungssignal wird eine Ladung in den Kalibrierungskondensator Cref
eingebracht, die sich nach Gleichung (4.4) berechnen lässt. Dabei entspricht Qin der
eingebrachten Ladung, U0 dem Spannungsniveau und LU der Abschwächung. Bei dieser
Gleichung sind die eektive Eingangskapazität des Vorverstärkers und die Sensorkapazität nicht berücksichtigt. Der sich daraus ergebende Fehler wird in Abschnitt 4.3.3 näher
36
4.3 Kalibrierung
Abbildung 4.5: Durch den Widerstand und den Kalibrierungskondensator wird das
Rechtecksignal dierenziert und in eine Art Sägezahn -Signal verwandelt.
erläutert.
LU
Qin = U0 · 10− 20 · Cref
(4.4)
Gemessen wird nun der Mittelwert in ADC -Einheiten in Abhängigkeit von der eingebrachten Ladung Qin . In den Abb. 4.6a, 4.6c und 4.6e sind die Messungen mit den
verschiedenen kontaktierten Sensoren und der jeweils angepassten linearen Funktion
dargestellt. Die Messungen mit dem Silizium -Sensor CC1325 wurden mit 150 V Sensorspannung aufgenommen. Die Messungen mit dem Saphir -Sensor wurden mit eingeschalteter Hochspannungsquelle, aber bei 0 V aufgenommen. Die viereckigen, blauen Messpunkte gehören zum invertierenden Kanal und die runden, roten Messpunkte
zum nicht invertierenden Kanal. Die grünen und magentafarbenen, nicht ausgefüllten
Messpunkte sind Kontrollmessungen mit gleicher nomineller Abschwächung, aber unterschiedlicher Einstellung der variablen Abschwächungseinheit. Zum Beispiel anstelle
der 20 dB -Stufe wird die 10 + 10 dB -Einstellung benutzt. Die Messungen sind mit einer Signalgeneratorspannung von 1 V durchgeführt, die, wie oben beschrieben, eektiv
nur U0 = 0,996 ± 0,004 V beträgt. Der Kehrwert der Steigung jeder eingezeichneten
Geraden entspricht der Kalibrierungskonstanten, die das Verhältnis von Elektronen pro
ADC -Einheit angibt. Der Schnittpunkt mit der y -Achse entspricht dem theoretischen
Pedestal. Die Fehler in den Steigungen der Kalibrierungsgeraden werden durch die ungenaue Bestimmung der eingebrachten Ladung dominiert, welches sich hauptsächlich durch
die einprozentige Genauigkeit des Kalibrierungskondensators Cref ergibt. In den dazugehörigen Abb. 4.6b, 4.6d und 4.6f sind die Abweichungen der einzelnen Messpunkte
von den durch die linearen Funktionen bestimmten Werte aufgetragen. In diesen Abweichungen ist eine Systematik zu erkennen, die darauf hindeutet, dass die eingebrachte
Ladung von der berechneten abweicht, wenn man annimmt, dass die Elektronik über den
gesamten Messbereich linear ist. In Abb. 4.7a ist das Ergebnis der zweiten Kalibrierung
mit dem Saphir -Sensor bei ebenfalls 0 V Sensor -Spannung dargestellt. Bei dieser Messung beträgt das eingestellte Spannungsniveau des Signalgenerators 500 mV, dadurch
37
4 Inbetriebnahme
wird entsprechend der Gleichung (4.4) nur etwa halb so viel Ladung Qin bei der jeweils
gewählten Abschwächung eingebracht. Als wirklich anliegendes Spannungsniveau wird,
wie weiter oben beschrieben, ein Korrekturfaktor von 0,996 benutzt und es ergibt sich
ein geschätztes Spannungsniveau von 498 ± 2 mV. Dieses hat zur Folge, dass ein anderer
Messbereich der Elektronik benutzt wird und eine Nichtlinearität der Elektronik würde
so ein anderes Abweichungsmuster der Messwerte produzieren. In Abb. 4.7b ist wieder
die Abweichung der Messwerte von der linearen Ausgleichsgeraden aufgetragen. In der
Verteilung dieser Messpunkte ist die gleiche systematische Abweichung zu erkennen, wie
bei den vorherigen drei Kalibrierungen. Dieses stützt die Annahme, dass die Elektronik linear ist, bzw. der Fehler durch die Nichtlinearität deutlich geringer ist als diese
systematische Abweichung, und dass die systematische Abweichung durch die fehlerhaft
berechnete, eingebrachte Ladung entsteht. Der dominierende Fehler in der Berechnung
der eingebrachten Ladung nach Gleichung (4.4) kommt durch die Abschwächung LU
zustande. Um Korrekturfaktoren für die nominellen Abschwächungswerte zu ermitteln,
wird für jede der acht Kalibrierungen und für jede nominelle Abschwächung ein Korrekturfaktor nach (4.7) bestimmt. Dabei ist Qf it die nach der angepassten linearen Funktion
berechnete Ladung, Qin die nach Gleichung (4.4) berechnete Ladung und SADC der gemessene Mittelwert des Signals in ADC -Einheiten. Die eigentlichen Korrekturfaktoren
F korr für jede der nominelle Abschwächungen ergeben sich aus den Mittelwerten über
alle 8 Kalibrierungen. Um die korrigierten Abschwächungen der einzelnen Stufen der variablen Abschwächungseinheit zu erhalten, wird die Gleichung (4.4) nach LU umgestellt.
Dies ergibt die Gleichung (4.8), hierbei ist der entsprechende, gemittelte Korrekturfaktor
bereits eingefügt und die 39,3 dB durch die beiden zusätzlichen, koaxialen Abschwächer
abgezogen.
SADC = a · Qin + b
(4.5)
SADC − b
a
Qf it
Fkorr =
Qin
Qin · F korr · e
LU = − log10
· 20 − 39,3 dB
Cref · U0
Qf it =
(4.6)
(4.7)
(4.8)
In Tabelle 4.2 ist exemplarisch die Bestimmung des korrigierten Wertes für die nominelle
Abschwächung von 17 dB dargestellt. Der Mittelwert der Korrekturfaktoren ergibt sich
zu 1,0035 ± 0,0002. Damit ergibt sich mit Gleichung (4.8) eine korrigierte Abschwächung
von 16,970 ± 0,003 dB, der Fehler entspricht dem Fehler des Korrekturfaktors. Die korrigierten Werte und deren Fehler sind für die anderen benutzten Abschwächungen in
Tabelle 4.3 aufgeführt.
Die Abb. 4.8a bis 4.8f geben die Ergebnisse der ersten sechs Kalibrierungen mit den
korrigierten Abschwächungswerten wieder. An den drei Abb. 4.8b, 4.8d und 4.8f ist
nun eine andere systematische Abweichung von der idealen Linearität zu erkennen. In
dem für Messungen relevanten Bereich bis etwa 105 e− ist diese Nichtlinearität mit etwa
± 3 ADC -Kanälen vernachlässigbar.
38
4.3 Kalibrierung
(a)
(b)
(c)
(d)
(e)
(f)
Abbildung 4.6: Ergebnisse bei 996 mV Signalniveau: (a) Kalibrierung ohne kontaktierten
Sensor; (b) Dierenz gemessener minus angepasster Wert ohne kontaktierten Sensor; (c) Kalibrierung mit Saphir -Sensor; (d) Dierenz gemessener minus angepasster Wert mit Saphir -Sensor; (e) Kalibrierung mit
Silizium -Sensor CC1325 und (f) Dierenz gemessener minus angepasster
Wert mit Silizium -Sensor CC1325.
39
4 Inbetriebnahme
Kalibrierung mit:
kein Sensor non inv
kein Sensor inv
Saphir non inv
Saphir inv
CC1325 non inv
CC1325 inv
Saphir non inv
Saphir inv
ADC a in ADC/e−
3127 ± 0,4
0,030 306
3197 ± 0,4
0,030 92
3099 ± 0,4
0,030 318
3143 ± 0,4
0,030 669
3063 ± 0,4
0,029 975
3109 ± 0,4
0,030 37
1672 ± 0,4
0,030 785
1681 ± 0,4
0,031 167
Mittelwert in
b
ADC Qf it in e−
207,72
95 498
211,24
95 593
203,86
95 492
213,68
95 514
200,03
95 511
207,06
95 549
201,75
47 757
193,56
47 724
in
Fkorr
1,003 348
1,004 355
1,003 29
1,003 517
1,003 494
1,003 891
1,003 527
1,002 83
Tabelle 4.2: In der Tabelle sind am Beispiel der 17 dB -Abschwächung die Zwischenergebnisse für die Ermittlung des korrigierten Abschwächungswertes dargestellt.
Die oberen sechs Zeilen entsprechen der Kalibrierung mit einem Spannungsniveau von 996 mV, die unteren beiden mit 498 mV. Die Fehler in allen Steigungen a entsprechen ± 0,000 003 ADC/e− , in den Schnittpunkten mit der
y -Achse b sind sie ± 0,18 ADC. Die Genauigkeit der Qf it ergibt sich so zu
0,02 %.
(a)
(b)
Abbildung 4.7: Ergebnisse bei 496 mV Signalniveau: (a) Kalibrierung mit Saphir -Sensor
und (b) Dierenz gemessener minus angepasster Wert mit Saphir -Sensor.
40
4.3 Kalibrierung
Abschwächung nominal in dB Abschwächung korrigiert in dB Abweichung in dB
40 ± 0,6
34 ± 0,51
30 ± 0,45
28 ± 0,42
26 ± 0,39
24 ± 0,36
23 ± 0,345
22 ± 0,33
21 ± 0,315
20 ± 0,3
19 ± 0,285
18 ± 0,27
17 ± 0,255
16 ± 0,25
15 ± 0,25
39,94 ± 0,097
33,95 ± 0,03
29,987 ± 0,004
27,994 ± 0,006
26,015 ± 0,009
23,994 ± 0,01
23,019 ± 0,013
22,022 ± 0,01
21,015 ± 0,01
20,036 ± 0,008
19,005 ± 0,007
17,988 ± 0,003
16,97 ± 0,003
16,016 ± 0,005
14,988 ± 0,01
−0,06
−0,05
−0,013
−0,006
0,015
−0,006
0,019
0,022
0,015
0,036
0,005
−0,012
−0,03
0,016
−0,012
Tabelle 4.3: In der Tabelle sind die für die Kalibrierung des elektronischen Kanals benutzten nominellen Werte der variablen Abschwächungseinheit BMA-35110
von Trilithic Broadband Instruments [Tri12] mit der vom Hersteller angegebenen Genauigkeit in der ersten Spalte aufgelistet. In der zweiten Spalte
stehen die nach Gleichung (4.8) ermittelten korrigierten Abschwächungen.
Die letzte Spalte enthält die Dierenz zwischen den korrigierten und nominalen Abschwächungen.
41
4 Inbetriebnahme
(a)
(b)
(c)
(d)
(e)
(f)
Abbildung 4.8: Ergebnisse bei 996 mV Signalniveau mit den korrigierten Abschwächungswerten: (a) Kalibrierung ohne kontaktierten Sensor; (b) Dierenz gemessener minus angepasster Wert ohne kontaktierten Sensor; (c)
Kalibrierung mit Saphir -Sensor; (d) Dierenz gemessener minus angepasster Wert mit Saphir -Sensor; (e) Kalibrierung mit Silizium -Sensor
CC1325 und (f) Dierenz gemessener minus angepasster Wert mit Silizium -Sensor CC1325.
42
4.3 Kalibrierung
4.3.2 Physikalische Kalibrierung
Für die Durchführung dieser Kalibrierung steht zur Zeit nur eine schwache 241 Am -Quelle
mit einer Aktivität von etwa 326 kBq zur Verfügung. 241 Am ist ein Alpha -Strahler, bei
dem in 36 % aller Zerfälle ein γ -Quant mit einer Energie von 59,54 keV durch den angeregten 237 Np -Kern emittiert wird [Bas06]. Diese Linie der 241 Am -Quelle wird für die
Kalibrierung benutzt. Wenn solch ein Quant in dem Sensor ein Elektron trit, überträgt
es seine Energie und den Impuls an dieses. Das Elektron verliert auf dem Weg durch
den Sensor seine Energie durch Ionisierung von Gitteratomen. Somit geht die gesamte
Energie des γ -Quants in die Bildung von Elektron -Loch -Paaren. Die mittlere Energie
zur Erzeugung eines Elektron -Loch -Paares beträgt 3,67 eV nach [Spi10]. Damit ergibt
sich eine Produktion von 1,62 · 104 Elektron -Loch -Paaren pro γ -Quant. Wenn an dem
Sensor eine Spannung anliegt, die gröÿer als die der vollständigen Verarmung ist, kann
man von der Annahme ausgehen, dass der ungeschädigte Sensor eine hundertprozentige
Ezienz in der Ladungssammlung aufweist. Durch die Bestimmung der Dierenz zwischen dem wahrscheinlichsten Wert des Signals und dem Mittelwert des Pedestals kann
der Verstärkungsfaktor der Elektronik bestimmt werden.
Zum Durchführen der Kalibrierung bietet es sich an, die 241 Am -Quelle mit einer Folie
einzuschlagen, um zu verhindern, dass α -Teilchen den Sensor erreichen. Die so eingeschlagene Quelle wird unter dem Einlassfenster des Triggers befestigt. Dabei sollte
vorsichtig vorgegangen werden, um das schwarze Papier vor dem Einlassfenster nicht zu
beschädigen. Die Quelle bendet sich nun direkt über dem Sensor. Bei der benutzten
Quelle ist die Ereignisrate mit etwa 2,6 Hz allerdings sehr gering. Das Triggern des Signals kann bei dieser Messung nicht mit den Szintillatorzählern durchgeführt werden.
Statt dessen muss das Signal zum Selbsttriggern benutzen werden. Dafür gibt es zwei
Möglichkeiten. Entweder wird der freie Ausgang des Shapers zum Triggern benutzt. Dazu wird dieser mit einem Inverter und weiter mit dem Diskriminator verbunden. Der
Inverter ist notwendig, da der Diskriminator ein negatives Eingangssignal benötigt. Als
Inverter kann die Linear Fan-In/Fan-Out - Einheit benutzt werden, die über einen invertierenden Ausgang verfügt. Diese Methode führt aber zu einem groÿen Rauschen und ist
daher weniger gut geeignet.
Die bessere Alternative ist, das Signal in der Linear Fan-In/Fan-Out -Einheit in zwei
Signale aufzuspalten, wovon eines zum Triggern benutzt werden kann. Dieses wird mit
dem Eingang des Diskriminators verbunden. Da das Signal eine Amplitude von etwa
26 mV hat und die kleinstmögliche Schwellspannung des Diskriminators bei 25 mV liegt,
muss ein kleiner Trick angewandt werden, um die Schwellspannung weiter abzusenken.
Die Linear Fan-In/Fan-Out -Einheit ermöglicht es, das Nullniveau des Ausgangs bis zu
etwa 5,5 mV zu verschieben. Dieses bewirkt eine eektive Schwellspannung des Diskriminators von 19,5 mV bei einem Signalniveau von 26 mV.
Durch die Linear -Fan-In/Fan-Out -Einheit verzögert sich das Triggersignal und die
Zeitabstimmung zwischen Gate -Anfang und Signal -Anfang stimmt nicht mehr. Um das
zu korrigieren, wird die Verzögerungsleitung derart verlängert, dass sich wieder eine
Zeitabstimmung von 65 ns ergibt. Dieses wird mit dem Oszilloskop überprüft. Durch
diese zusätzliche Kabellänge und die Linear -Fan-In/Fan-Out -Einheit ergibt sich eine
zusätzliche Abschwächung des Signals, die zu einer veränderten Kalibrierungskonstan-
43
4 Inbetriebnahme
ten G führt. Für das Bestimmen der Kalibrierungskonstanten für diesen abgeänderten
Signalverlauf ist eine erneute Kalibrierung mit dem Signalgenerator in dieser Konguration erforderlich, um anschlieÿend den Vergleich zwischen beiden Methoden ziehen zu
können.
Abbildung 4.9: Die Abbildung zeigt das mit dem ADC gemessene Spektrum der
241 Am -Quelle. Der groÿe Peak entspricht der 59,54 keV γ -Linie. Der kleine Peak bei 250 ADC -Einheiten entsteht durch Rauschen.
Abbildung 4.9 zeigt die Messung der 59,54 keV γ -Linie der 241 Am -Quelle. Als Sensor wurde der Silizium -Sensor CC1325 benutzt, an der eine Biasspannung von
UBias = 200 V anlag. Der groÿe Peak entspricht der 59,54 keV γ -Linie. Die deutliche Abweichung von der Gauÿ -Form unterhalb von 600 ADC -Einheiten entsteht durch
nicht vollständig gesammelte Ladungen. Dieses passiert z.B. in dem Fall, wenn das
einfallende γ -Quant ein Elektron trit und dieses den Sensor verlässt, bevor es die gesamte Energie in Form von Elektron -Loch -Paaren deponiert hat. Diese Abweichung von
der Gauÿ -Form muss berücksichtigt werden, wenn der Mittelwert des Peaks bestimmt
wird. In Abbildung 4.10 ist der Mittelwert des Peaks, der sich beim Gauÿ -Fit ergibt,
44
4.3 Kalibrierung
aufgetragen gegenüber dem ADC -Wert, der als linke Grenze für den Fit angegeben wird.
Um einen Kompromiss zwischen einer möglichst geringen linken Grenze für den Fit zu
nden und dennoch möglichst dicht am maximalen Mittelwert in Abb. 4.10 zu sein, wird
über die drei Mittelwerte bei den Grenzen 610 ADC, 620 ADC und 630 ADC gemittelt.
Als Mittelwert der 59,54 keV γ -Linie ergeben sich so 665,5 ± 0,2 ADC -Einheiten. Der
Mittelwert des Pedestals wurde zu 189,4 ± 0,2 ADC -Einheiten bestimmt. Die Dierenz
beider ergibt 476,1 ± 0,3 ADC -Einheiten. Als Kalibrierungskonstante ergibt sich:
16223 e−
476,1 ± 0,3 ADC
e−
= 34,07 ± 0,02
ADC
G=
(4.9)
Abbildung 4.10: Die Abbildung zeigt die Veränderung des Peak -Mittelwertes in Abhängigkeit von der linken Grenze für den Fitbereich.
Das Ergebnis für die Kalibrierung mit dem Signalgenerator in dieser Konguration ist
in Abb. 4.11 dargestellt, in Tabelle 4.4 sind die Farben aufgeschlüsselt. Die Kalibrierung
wurde mit drei verschiedenen Sensoren bei unterschiedlichen Spannungen durchgeführt.
Aus den verschiedenen Sensorkapazitäten kann die eektive Eingangskapazität des Vorverstärkers bestimmt werden, mehr dazu in Abschnitt 4.3.3.
45
4 Inbetriebnahme
Abbildung 4.11: Kalibrierungsergebnisse mit unterschiedlichen kontaktierten Sensorkapazitäten. Die Konguration des β -Messstandes entspricht der Konguration in Abb. 4.9.
Farbe
Sensortyp
Sensorkapazität in pF Biasspannung in V
schwarz
CC1325
10,41
120
rot
CC1325
10,34
200
grün
Saphir Testsensor
4,12
0 Generator aus
blau
Saphir Testsensor
4,12
0 Generator an
lila
kein Sensor
0
0 Generator aus
Tabelle 4.4: Zuordnung der Farben für die Abb. 4.11
Für den Vergleich der Kalibrierungskonstanten aus Gleichung (4.9) der 241 Am Kalibrierung mit der Signalgenerator -Kalibrierung muss das lila dargestellte Ergebnis in Abb. 4.11 herangezogen werden. Bei dieser Kalibrierung ist keine zusätzliche
Kapazität kontaktiert. Dadurch unterscheiden sich diese Signalgenerator -Kalibrierung
und die 241 Am -Kalibrierung mit dem Sensor CC1325 nur durch die beiden Kapazi-
46
4.3 Kalibrierung
täten Cref = 10 ± 0,1 pF und Cdet = 10,38 ± 0,03 pF. Für die Kapazität Cdet wird
der Mittelwert der Kapazitäten bei 120 V und 200 V angenommen. Die Kapazitäten
in Tabelle 4.4 wurden mittels eines C -V -Messstandes bestimmt. Die Signalgenerator Kalibrierung ergibt eine Kalibrierungskonstante von G = 33,831 ± 0,003 e− /ADC. Dieser Wert weicht lediglich um 0,7 % von dem Ergebnis G = 34,07 ± 0,02 e− /ADC der
241 Am -Kalibrierung ab. Dieser Unterschied kommt hauptsächlich durch die bei der Kalibrierung mit dem Signalgenerator eingebrachten Ladung zustande. Diese wird nach
Gleichung (4.4) bestimmt. Dabei dominiert nach der Korrektur der Abschwächungswerte
die Ungenauigkeit des Kalibrierungskondensators Cref mit 1 %, gefolgt von der Ungenauigkeit des angelegten Spannungsniveaus mit 0,4 % und etwaig weiterer Einüsse. Wenn
die 241 Am -Kalibrierung als verlässlich betrachtet wird, können die Ergebnisse der Kalibrierungen mit dem Signalgenerator durch Einführen eines Korrekturfaktors verbessert
werden. Dieser Korrekturfaktor entspricht dem Quotienten der Kalibrierungskonstanten
der 241 Am -Kalibrierung und der Kalibrierung mit dem Signalgenerator, siehe Gleichung
(4.10). Durch diesen wird somit die Ungenauigkeit durch den Kalibrierungskondensator
und das angelegte Spannungsniveau zusammen ausgeglichen.
FG =
GAm
GGenerator
= 1,007
(4.10)
Der systematische Fehler für die Bestimmung der Kalibrierungskonstanten mit der
241 Am -Quelle wird durch die Nichtlinearität der Ausleseelektronik angenommen. In dem
benutzten Messbereich wird die Abweichung mit ± 2 ADC -Kanälen abgeschätzt, siehe
hierzu Abb. 4.8. Das ergibt eine absolute Genauigkeit von 0,4 % für Bestimmung der
476,1 ADC -Einheiten der 59,54 keV Linie.
4.3.3 Eektive Eingangskapazität des Vorverstärkers
Abbildung 4.12: Schaltbild zur Bestimmung der eektiven Eingangskapazität des Vorverstärkers Cinp . Vorhandene Streukapazitäten sind mit in der eektiven
Eingangskapazität berücksichtigt.
Durch die Kalibrierungen mit den verschiedenen kontaktierten Sensoren, die in Abb.
4.9 zu sehen sind, kann die eektive Eingangskapazität bestimmt werden. Dazu wird
47
4 Inbetriebnahme
die Schaltung in Abb. 4.12 zugrunde gelegt. Der Kalibrierungskondensator Cref wird
wie vom Hersteller vorgegeben mit 10 ± 0,1 pF angenommen. Die Sensorkapazitäten
Cdet betragen 0 pF wenn kein Sensor kontaktiert ist, 4,12 pF bei dem Saphir -Sensor und
10,38 pF bei dem Silizium -Sensor CC1325 mit einer Biasspannung von 200 V. Die eektive Eingangskapazität des Vorverstärkers Cinp enthält die vorhandenen Streukapazitäten.
Durch die parallelen Kapazitäten Cdet und Cinp , die in Reihe mit der Kapazität Cref
sind, gilt Gleichung (4.11). Diese wird nach der in die Schaltung eingebrachten Ladung
Qinj umgestellt.
Qinj
Qinj
+
Cref
Cdet + Cinp
Cref (Cdet + Cinp )
=
· Vin
Cref + Cdet + Cinp
Vin =
Qinj
(4.11)
(4.12)
Die Ladung Qinj teilt sich zwischen der Sensor und der eektiven Eingangskapazität entsprechend ihrer Kapazitäten auf, es gilt Gleichung (4.14) und weiter Gleichung (4.15).
Qinj = Qdet + Qinp
Qinp
Qdet
=
Cdet
Cinp
Cdet
Qinj = Qinp 1 +
Cinp
(4.13)
(4.14)
(4.15)
Gleichung (4.12) mit (4.15) gleichgesetzt ergibt Gleichung (4.16). Sie beschreibt die Ladung, die bei der Kalibrierung in die eektive Eingangskapazität des Vorverstärkers gelangt. In Gleichung (4.16) ist wie in Gleichung (4.4) die nominelle eingebrachte Ladung
Qnom = Vin · Cref zu erkennen.
Cref · Cinp
· Vin
Cref + Cdet + Cinp
Cinp
= Vin · Cref ·
Cref + Cdet + Cinp
Cinp
= Qnom ·
Cref + Cdet + Cinp
Qinp =
(4.16)
(4.17)
(4.18)
Durch die theoretische Kalibrierungskonstante G0 und den gemessenen Mittelwert M
in ADC -Einheiten lässt sich die vom Vorverstärker gesammelte Ladung nach Gleichung
(4.19) berechnen. G0 ist die Kalibrierungskonstante, die sich ergeben würde, wenn keine
Kapazität mit dem Vorverstärkereingang verbunden wäre und somit die Ladung direkt
in den Vorverstärker eingebracht würde. Durch Gleichsetzen mit Gleichung (4.17) ergibt sich Gleichung (4.20). Das Zusammenfassen der Kalibrierungskonstanten mit dem
hinteren Bruch zu einer eektiven Kalibrierungskonstanten ergibt Gleichung (4.21). Diese eektiven Kalibrierungskonstanten entsprechen den Kalibrierungskonstanten, wie sie
48
4.3 Kalibrierung
mit dem Signalgenerator ermittelt werden.
Qinp = G0 · M
Cinp
Qnom
M=
·
G0
Cref + Cdet + Cinp
Qnom
M=
Gef f
(4.19)
(4.20)
(4.21)
Gleichsetzen der Gleichungen (4.20) und (4.21) ergibt (4.22)
Cref + Cdet + Cinp
Cinp
Cref + Cdet
= G0 · 1 +
Cinp
Cref + Cdet
= G
ef f
G0 − 1
Gef f = G0 ·
Cinp
(4.22)
(4.23)
(4.24)
Um nun Cef f aus Gleichung (4.24) zu bestimmen, muss die theoretische Kalibrierungskonstante G0 bestimmt werden. Dazu werden die eektiven Kalibrierungskonstanten, die
Abbildung 4.13: Aufgetragen sind die eektiven Kalibrierungskonstanten über der zum
Vorverstärker geschalteten eektiven Kapazität. Die beiden blauen
Messpunkte bei etwa 14 pF und 20 pF entsprechen dem Mittelwert der
entsprechenden Kalibrierungen aus Abb. 4.11 mit dem Saphir -Sensor
und dem CC1325 -Sensor. Der rote Punkt bei 0 pF ergibt sich durch
die Anpassung einer linearen Funktion und entspricht der theoretischen
Kalibrierungskonstanten.
49
4 Inbetriebnahme
sich durch die in Abb. 4.11 dargestellten Kalibrierungen ergeben, über der zum Vorverstärker geschalteten eektiven Kapazität aufgetragen. Die eektive Kapazität entspricht
der Summe aus den Kapazitäten des Kalibrierungskondensators Cref und des kontaktierten Sensors Cdet . Dieses ist in Abb. 4.13 dargestellt. Die beiden blauen Messpunkte
bei etwa 14 pF und 20 pF ergeben sich als Mittelwerte der entsprechenden Kalibrierungen mit dem Saphir -Sensor und dem CC1325 -Sensor. Durch die eingezeichnete lineare
Funktion lässt sich die theoretische Kalibrierungskonstante G0 bestimmen, dargestellt
durch den roten Punkt. Die eektive Eingangskapazität ergibt sich, als Mittelwert über
die drei eektiven Kapazitäten, nach Gleichung (4.24) zu 706 ± 6 pF.
4.4 Software
Für den Messstand wurden zwei Programme in C++ geschrieben. Sie laufen unter Linux auf dem Messrechner 15. Die Software, mit der die Messungen aufgenommen werden, heiÿt BetaControl, bendet sich im Verzeichnis
/data/BETASETUP/Software/BetaControl und liegt derzeit in der Version 1.5.1
vor. Gestartet wird sie in dem Verzeichnis mit dem Befehl ./betacontrol. Die
Software BetaAnalysis dient zum Analysieren der aufgenommenen Daten und
zum Erstellen von fünf Standardgraphen. Sie bendet sich in dem Verzeichnis
/data/BETASETUP/Software/BetaAnalyse, liegt in der Version 1.2 vor und wird
dort mit dem Befehl ./betaanalysis gestartet. Die Benutzung von BetaAnalysis wird
in Abschnitt 4.4.2 beschrieben.
4.4.1 BetaControl
Bedienung
Abb. 4.14 zeigt die Benutzeroberäche der Software BetaControl. In dem obersten Feld
Temperature kann eine Temperatur für die Sensorauageäche gewählt werden. Durch
ein Klicken auf den Knopf set temp wird die Temperatur durch eine PID -Regelung angefahren. Die PID -Regelung und deren Dimensionierung werden später im Abschnitt
4.4.1 beschrieben. Diese Funktion bietet sich bei bestrahlten Sensoren an, um sie möglichst schnell auf tiefe Temperaturen zu bringen und somit ein ungewolltes Ausheilen zu
vermeiden. Die gewählte Temperatur wird von der Software ebenfalls angefahren, wenn
entweder der run - oder run auto -Knopf gedrückt wird.
Um Messungen mit einem Sensor durchzuführen, muss dieser mittig über dem Kollimator auf der Auageäche positioniert und mit der Kontaktnadel kontaktiert werden. Das
Gehäuse sollte geschlossen und das Trockenluftventil aufgedreht werden. In BetaControl
muss eine Temperatur für die Messung ausgewählt werden. Im Feld Diode name muss
die Sensorbezeichnung angegeben werden, diese erscheint dann später in der logbook Datei. Bei der Auswahl Diode -Typ muss die Art des zu messenden Sensors mit einem
50
4.4 Software
Abbildung 4.14: Graphische Benutzeroberäche der BetaControl -Software v1.5.1
Häkchen markiert werden, je nachdem ob es sich um eine p - oder n -Typ -Diode handelt.
Dieses dient zur Sicherheit, um die richtige Polarität für den Sensor zu gewährleisten.
Ergänzend muss ein Häkchen gesetzt werden, ob es sich um eine Signalmessung handelt,
bei der die Szintillatorzähler zum Triggern benutzt werden oder ob es sich um eine Pedestalmessung handelt, bei der ein zufälliger Trigger benutzt wird. Das Umstellen zwischen
den beiden Triggermethoden muss zur Zeit noch von Hand an der Koinzidenzeinheit vorgenommen werden, kann aber von der Software übernommen werden, wenn eine neue
Koinzidenzeinheit mit einer Schnittstelle zum PC zur Verfügung steht. Im Bereich Statistics wird ausgewählt, wie viele Ereignisse pro Messspannung aufgenommen werden
sollen und bei Save location wird das gewünschte Verzeichnis eingetragen, in dem die
aufgenommenen Daten gespeichert werden sollen.
Für eine Einzelmessung wird unter Single measurement bei Voltage die gewünschte Hochspannung eingegeben. Das Klicken auf den run -Knopf unten links startet die Messung,
vorausgesetzt die eingegebenen Parameter sind korrekt und vollständig. Zum Durchführen einer automatischen Messreihe muss unter Auto measurement der Spannungsbereich
eingegeben werden, in dem automatisch gemessen werden soll. Hierbei ist darauf zu achten, dass die Polarität richtig gewählt wird. Bei n -Typ -Dioden müssen der Anfangs und Endwert für die Spannungen positiv oder Null sein. Bei p -Typ -Dioden müssen sie
negativ oder Null sein. Es ist möglich sowohl von kleinen zu groÿen Spannungen als auch
51
4 Inbetriebnahme
umgekehrt zu messen. Zusätzlich dazu muss der Betrag der Spannungsschritte zwischen
den Messungen bei Absolute voltage stepsize angegeben werden. Es wird empfohlen die
Auswahl Stop if breakdown voltage is reached zu markieren. Dadurch wird bei jedem
Spannungsschritt nach der Aufnahme des ADC -Spektrums überprüft, ob der gemessene
Sensorstrom den im Feld Condition: max absolute current angegebenen Strom übersteigt.
Falls dieses zutrit, wird die Messreihe vorzeitig abgebrochen. Bei korrekt eingegebenen
Parametern startet ein Klicken auf run auto die automatische Messreihe. Die Software
stellt dann die gewählte Temperatur und den Anfangswert der Hochspannung ein und
startet mit der Datenerfassung, wenn die Temperatur für mindestens einige Sekunden
stabil ist. Anschlieÿend wird so lange die Spannung erhöht bis der Endwert erreicht ist
oder eine Abbruchbedingung zum vorzeitigen Beenden führt. So eine Abbruchbedingung
kommt z.B. durch das Erreichen der breakdown voltage oder kann durch den STOP! Knopf veranlasst werden. Dadurch wird die Messung allerdings bei der momentanen
Spannung noch zu Ende geführt, die logbook -Datei geschrieben und erst dann wird die
Messreihe abgebrochen und die Spannung auf Null gefahren.
Funktionsweise
In Abb. 4.16 ist ein Aktivitätsdiagramm für die Software BetaControl dargestellt. Durch
das Starten von BetaControl wird wie in jedem C++ Programm die main() gestartet.
Sie initialisiert das GLib -Thread -System, instantiiert ein BetaControlGui -Objekt und
startet die Event Loop des Thread Systems. Das BetaControlGui -Objekt dient zum Erzeugen und Verwalten der Graphischen Benutzeroberäche, auÿerdem wird durch dieses
ein Objekt der Preparer -Klasse instantiiert. Das Preparer -Objekt dient in erster Linie
dazu, alle notwendigen Vorbereitungen zu treen, um den Eingaben des Benutzers folgen zu können. Dazu wird ein Objekt der Manager -Klasse erschaen. Dieses Objekt
initialisiert die Kommunikation mit der externen Elektronik. Dazu gehören das Keithley
2700 [Kei12a] zur Temperaturmessung, das Keithley 6517b [Kei12b] für die Hochspannungsversorgung und Strommessung, das Lauda RE 1050 [LAU12] für die Kühlung, die
8 -fach -Relaiskarte von Conrad Electronic [Con12] und das TDK -Lambda ZUP 20-10
[TDK12] für den Peltierstrom. Weiter wird ein Objekt der ThreadMaster -Klasse erzeugt.
Dieses Objekt startet drei Threads. Erstens einen Temperature_PID Thread, dieser regelt die Temperatur der Auageäche. Zweitens einen Thread, mit dem die Hochspannung geregelt wird und drittens wird ein Thread gestartet, der für die Datenerfassung
(DAQ) zuständig ist. Die Datenerfassung beruht auf einem am DESY -Zeuthen entwickelten Programm, unter Verwendung der Standardbibliotheken der Firmen C.A.E.N.
Technologies, Inc. und W-IE-NE-R Plein & Baus GmbH.
Nach dieser Vorarbeit ist die Software bereit, auf die Eingaben des Benutzers zu reagieren. Wenn alle Angaben in der Benutzeroberäche korrekt gemacht wurden, führt
ein Klicken auf den run -Knopf dazu, dass die Eingaben eingelesen werden und vom
Preparer an den ThreadMaster weitergereicht werden. Der ThreadMaster setzt dann
den Temperatur -Sollwert in dem Temperatur_PID -Thread, dieser fängt daraufhin mit
der Temperaturregelung an. Weiter wird die gewählte Spannung an den Thread für die
Hochspannung übergeben. Dieser stellt die Spannung derart ein, dass sie in Fünf -Volt -
52
4.4 Software
Schritten hochgefahren wird, mit jeweils einer Verzögerung von einer Viertelsekunde.
Wenn die Temperatur stabil eingestellt ist, beginnt der DAQ -Thread mit der Datenerfassung.
Bei einer automatischen Messung über einen eingestellten Spannungsbereich wird zusätzlich ein Logbuch erstellt, in dem für jede Messung die RUN -Nummer, der Sensorname,
die angelegte Hochspannung, der Zeitpunkt des Beginns der Messung sowie die aktuelle
Temperatur eingetragen werden. Anschlieÿend beginnt die Datenerfassung. Nachdem im
automatischen Modus eine Messung beendet wurde, wird die Spannung um einen Spannungsschritt erhöht bzw. erniedrigt, anschlieÿend wird überprüft, ob die Temperatur
immer noch stabil ist. Ist dies der Fall, werden wieder die Logbucheinträge geschrieben
und die Datenerfassung durch den DAQ -Thread erneut gestartet. Dieses wiederholt sich
so lange, bis der gesamte Spannungsbereich durchgemessen ist oder eine Abbruchbedingung erfüllt ist. Anschlieÿend steht die graphische Benutzeroberäche für neue Eingaben
zur Verfügung. Abb. 4.15 zeigt die wichtigsten Klassen der BetaControl -Software.
Abbildung 4.15: Graphische Übersicht der BetaControl -Software v1.5.1 mit ihren wichtigsten Klassen
53
4 Inbetriebnahme
Abbildung 4.16: Aktivitätsdiagramm der BetaControl -Software v1.5.1
54
4.4 Software
Temperaturregelung
Für die Temperatur -Regelung wird das Prinzip der PID -Regelung verwendet. PID Regelung steht für eine proportional -dierential -integralwirkende Regelung. Diese Regelung besteht aus der Kombination eines Proportional -Gliedes, eines Integral -Gliedes
und eines Dierential -Gliedes. Sie vereint die Vorteile dieser drei Glieder und regelt
dadurch den Ist -Wert schnell und genau auf den Soll -Wert ein. Gleichung (4.25) ist
die Dierentialgleichung für den kontinuierlichen, idealen PID -Regler. Hierbei ist y(t)
die Stellgröÿe, die dem Strom durch das Peltier -Element entspricht. Als Stromquelle dient dafür das TDK Lambda ZUP 20-10. Die Regelabweichung e(t) entspricht der
Temperaturdierenz zwischen der Ist -Temperatur und der Soll -Temperatur. Kp ist der
Proportionalbeiwert, Ki der Integrierbeiwert und Kd der Dierenzierbeiwert. Für die
Anwendung im β -Messstand wird die Dierentialgleichung (4.26) für den zeitdiskreten
PID -Regler benutzt . Hierbei ist Ta die Abtastzeit und k die Nummer der Abtastung.
Die minimale Abtastzeit der Regelung beträgt 500 ms, falls sich eine längere Abtastzeit
durch z.B. langsame Kommunikation mit den Geräten ergibt, wird dies von der Software
automatisch berücksichtigt.
Zt
y(t) = Kp · e(t) + Ki
de(t)
dt
(4.25)
Kd
(ek − ek−1 )
Ta
(4.26)
e(τ )dτ + Kd
0
y(t) = Kp · ek + Ki · Ta
k
X
ei +
i=0
Aus der Gleichung (4.26) ergibt sich der PID -Stellungsalgorithmus zu:
yk = yk−1 + q0 · ek + q1 · ek−1 + q2 · ek−2
(4.27)
Mit den Parametern:
q0 = Kp + Ki · Ta +
q1 = −Kp − 2
q2 =
Kd
Ta
(4.28)
Kd
Ta
Kd
Ta
Die PID -Regelung ist in der Klasse Temperature_PID realisiert, die von der maÿgeblich
durch Joachim Ere Universität Hamburg implementierte device_library zur Verfügung
gestellt wird. Die Parameter, welche die Temperature_PID -Klasse benötigt, benden
sich in der Kongurationsdatei source_con.cfg unter der Kennzeichnung [T_PID]. Der
Parameter oset_chiller_temp gibt die Temperaturdierenz zum Soll -Wert an, auf die
das Kühlsystem Lauda RE 1050 eingestellt wird. Es bietet sich an, hier einen positiven, einstelligen Wert zu setzen. Dadurch ist die Stromussrichtung durch das Peltier -Element so, dass die Sensorauageäche gekühlt wird. Die Wahrscheinlichkeit, dass
ein Absturz der Software zu einem unkontrollierten Aufheizen der Sensorauageäche
55
4 Inbetriebnahme
führt, wird so reduziert. Ein Softwareabsturz in der Einschwingungsphase ist weiterhin problematisch und kann zu einem starken Aufheizen der Sensorauageäche führen.
In Zukunft sollte diese Problematik durch eine von der Software unabhängige elektronische Schaltung derart gelöst werden, dass beim Erreichen einer maximalen Temperatur der Stromuss durch das Peltier -Element automatisch unterbrochen wird. Der
Parameter lowest_chiller_temp setzt die untere Grenztemperatur in Grad Celsius für
das Kühlsystem. Ein Anheben dieser Grenztemperatur kann der Kondensation an den
Kühlschläuchen an Tagen mit hoher relativer Luftfeuchte vorbeugen. Der Parameter
aggressive_range gibt den Bereich um die Soll -Temperatur in Kelvin an, in dem das
integrierende Glied in der PID -Regelung vollständig mitwirkt. Auÿerhalb dieses Bereiches ist die Wirkung des integrierenden Gliedes auf ein Hundertstel reduziert, dieses
verbessert das Einschwingverhalten. Der Parameter stability_range setzt in Kelvin den
Bereich um die Soll -Temperatur, in dem die Soll -Temperatur als erreicht gilt. Der Parameter stability_duration wird in Sekunden gesetzt. Durch ihn wird festgelegt, wie
lange sich die Ist -Temperatur, in dem durch den Parameter stability_range denierten
Bereich, um die Soll -Temperatur benden muss, damit sie von der Software als stabil
angenommen wird. Ein Setzen des Parameters dierential_step_size_2 auf einen Integer -Wert ungleich 0 bewirkt, dass die Regelung nicht wie in Gleichung (4.26) im letzten
Term die Dierenz (ek − ek−1 ) zwischen der aktuellen Regelabweichung und der vorherigen Regelabweichung berechnet, sondern die Dierenz (ek −ek−2 ) zwischen der aktuellen
Regelabweichung und der vorletzten Regelabweichung berechnet. Die Abtastdauer Ta im
Zähler wird dabei durch die Summe der Abtastdauern des aktuellen Regelzyklus und des
vorherigen ersetzt. Dieses führt zu einem trägeren Verhalten des dierentialwirkenden
Gliedes. Diese Funktion wird in der Temperatur -Regelung für einen anderen Messaufbau
benötigt, dessen Software ebenfalls die device_library benutzt. Für den β -Messstand ist
der Standard dierential_step_size_2=0. Durch das Setzen eines Integer -Wertes gröÿer
als Null für den Parameter verbosity wird die Software dazu veranlasst, Textausgaben in
der Konsole zu geben. Abhängig von der Gröÿe des Integer -Wertes werden mehr Ausgaben gemacht. Die drei Beiwerte sind derzeit mit Kp = 1,44, Ki = 0,41 und Kd = 1,21
gesetzt.
Um die drei Beiwerte zu bestimmen, wird wie folgt vorgegangen. Ki und Kd werden gleich
Null gesetzt. Die verbosity wird auf mindestens vier gesetzt, dadurch wird während jedes
Regelzyklus eine Textausgabe mit unter anderem der aktuellen Laufzeit seit dem Start
der Regelung und der aktuellen Temperatur gemacht. Der Kp -Wert entspricht, wie in
Gleichung (4.26) zu sehen, dem Proportionalitätsfaktor zwischen der gemessenen Temperaturdierenz und dem zu regelnden Strom durch das Peltier -Element. Durch einen
zu niedrig gewählten Kp -Wert wird der Strom nicht ausreichen, um die Soll -Temperatur
zu erreichen. Der Kp -Wert wird so lange erhöht, bis die Ist -Temperatur dauerhaft um
die Soll -Temperatur zu Schwingen beginnt, dieser Wert wird hier weiter als Kp krit bezeichnet. Dazu muss nach jeder abgespeicherten Veränderung vom Kp -Wert in der source_con.cfg die Software neu gestartet werden, die Soll -Temperatur eingestellt werden
und auf den set temp -Knopf gedrückt werden. Anhand der Ausgabe durch die eingestellte verbosity wird die Periodendauer Tkrit der Dauerschwingung bestimmt. Damit lassen
56
4.4 Software
sich nach den Gleichungen (4.29) bis (4.31) die drei Beiwerte bestimmen [Rob12].
(4.29)
Kp = 0,6 · Kp krit
Kp krit
Ki = 1,2 ·
Tkrit
Kd = 0,072 · Kp krit · Tkrit
(4.30)
(4.31)
Die Soll -Temperatur, die für diese Beiwertebestimmung gewählt wird, sollte nicht niedriger sein als der lowest_chiller_temp -Wert minus dem oset_chiller_temp -Wert.
Unterhalb dieser Temperatur wird ein gröÿerer Peltier -Strom benötigt, um die Soll Temperatur zu halten. Dieser groÿe Peltier -Strom beeinusst die Ermittlung der Beiwerte und sollte vermieden werden.
Software -Fehler
Derzeit sind zwei unkritische Software -Fehler bekannt. Sie treten unregelmäÿig beim
Starten von BetaControl auf. Der erste Fehler kommt durch eine fehlerhafte Initialisierung des VME- ADC -Kontrollers zustande. Dieser Fehler kann behoben werden, indem
BetaControl mit der Tastenkombination Control + c abgebrochen wird und anschlieÿend der ADCs aus - und wieder eingeschaltet wird. Ein erneutes Starten von BetaControl
verläuft in der Regel erfolgreich. Die Textausgabe bei diesem Fehler in der Konsole ist
in der Auistung 4.1 dargestellt.
Listing 4.1: Textausgabe in der Konsole bei fehlerhafter Initialisierung des
VME- ADC -Kontrollers während des Startens von BetaControl.
**********************************************
APPLICATION MANAGER INITIALIZATION . . .
**********************************************
−> VMUSB i n i t i a l i z a t i o n . . .
−> O p e n i n g VMUSB . . . Ok ( s e r i a l number : VM0051 )
−> VMUSB' s F i r m w a r e ID i s 3 8 0 0
−>
Initialization
looking
{ [ADC DBG] }
for
:
of
ADC1
check
(0 x0x19a05c0 )
ADC1
at
0 x666600
ADC1' s
base
. . . { [ ADC DBG] }
:
ADC1
not
found
address
Der zweite bekannte Fehler kommt wahrscheinlich durch ein Abstürzen des GPIB Bus -Treibers zustande. Dadurch kann die Kommunikation mit den Keithley -Geräten
nicht aufgebaut werden und BetaControl kann nicht vollständig gestartet werden. Zum
Beheben dieses Fehlers wird ebenfalls zuerst mit der Tastenkombination Control + c
das Programm abgebrochen. Anschlieÿend wird wahlweise der blaue USB -Stecker aus
57
4 Inbetriebnahme
dem USB -Hub gezogen oder das Kabel zwischen dem USB -HUB und dem PC getrennt.
Ein erneutes Einstecken des Steckers nach einigen Sekunden Wartezeit veranlasst das
Betriebssystem dazu, den GPIB -Bus -Treiber neu zu starten. Das Starten von BetaControl verläuft hiernach in der Regel ebenfalls erfolgreich. Falls immer noch ein
Problem mit dem GPIB -Bus -Treiber besteht, sollte bei der erneuten Behebung eine
längere Wartezeit vor dem Wiedereinstecken des USB -Kabels abgewartet werden. Die
Textausgabe der Software ist in Auistung 4.2 dargestellt.
Listing 4.2: Textausgabe in der Konsole bei fehlerhaftem
des Startens von BetaControl.
GPIB -Bus
-Treiber während
m s 1 5 @ m e s s p l a t z 1 5 : / d a t a /BETASETUP/ S o f t w a r e / B e t a c o n t r o l \_v1\_5\_1\ $
./
betacontrol
−
starting
BetaControl
v1 . 5 . 1
\
now . . .
libgpib :
ibBoardOpen
failed
to
open
libgpib :
Cannot
libgpib :
error
allocate
in
device
file
/ dev / g p i b 0
memory
i s \ _cic ( ) !
Aborted
Eine weiter Fehlermeldung, diese ist in Auistung 4.3 dargestellt, kommt zustande, wenn
die Stromversorgung ZUP 20-10 von TDK -Lambda für das Peltier -Element nicht in den
Remote -Modus geschaltet ist. Zum beheben dieses Problems wird die Tastenkombination Control + c benutzt um BetaControl zu beenden. Anschlieÿend wird der Remote Modus an dem Gerät durch ein Drücken auf die REM -Taste aktiviert und BetaControl
kann erneut gestartet werden.
Listing 4.3: Textausgabe in der Konsole wenn die Stromquelle ZUP
Lambda nicht in den Remote -Modus geschaltet ist.
20-10
m s 1 5 @ m e s s p l a t z 1 5 : / d a t a /BETASETUP/ S o f t w a r e / B e t a c o n t r o l _ v 1 _ 5 _ 1 $
betacontrol
starting
BetaControl
v1 . 5 . 1
−
0
serial_zup
couldn ' t
convert
from
string !
couldn ' t
convert
from
string !
0
serial_relais
0
serial_lauda
buffer .
done
58
: SOUR : VOLT 0
now . . .
von TDK ./
4.4 Software
4.4.2 BetaAnalysis
Die Software BetaAnalysis dient zum einfachen Auswerten der Messdaten, die mit der
automatischen Messfunktion von BetaControl aufgenommen wurden. Die derzeitige Version von BetaAnalysis ist die v1.2. Die Daten einer kompletten Messreihe sind auf jeweils
zwei Ordner aufgeteilt. Der eine enthält die Histogramme, welche beim zufälligen Triggern mit dem ADC aufgenommen wurden. Dieser Typ wird als Pedestal bezeichnet. Der
andere enthält die auf die MIPs getriggerten Histogramme. Dieser Typ wird als Signal bezeichnet. In diesen Ordnern liegt für jeden Spannungsschritt eine run_xxxxx.root -Datei
vor, in der das jeweilige Histogramm gespeichert ist. Die xxxxx stellen eine fortlaufende
Nummerierung dar, beginnend bei 00000.
Abb. 4.17 zeigt die wichtigsten Klassen von BetaAnalysis. BetaAnalysis ist in zwei Teile
unterteilt. Im ersten Teil ndet das Analysieren der Histogramme statt, im zweiten Teil
das Erzeugen der Graphen. Durch ein Starten von BetaAnalysis wird zunächst durch
die Funktion GrabUserInput() des Analyzer -Objektes die Datei userInputFile.txt
eingelesen. In Auistung 4.4 ist der Inhalt dieser Datei abgebildet. Eingerückte Zeilen kommen durch für die Darstellung notwendige Zeilenumbrüche zustande und sind so
nicht in der Datei vorhanden. Beim Einlesen werden leere Zeilen und Zeilen, die mit dem
Nummernzeichen anfangen, ignoriert. Die Software benutzt den hinter der Kennzeichnung OUTPUT_LOCATION angegebenen Pfad als Speicherort für die zu erstellenden
Graphen. Die Graphen werden dort jeweils für sich in einer *.root -Datei gespeichert.
Der aus dem Vergleich mit der 241 Am -Kalibrierung gewonnene Korrekturfaktor ieÿt
über die Kennzeichnung CORRECTION in die Auswertung mit ein, er wird als double Zahl behandelt. Durch das Einfügen einer Zeile die mit G= beginnt, gefolgt von einer
double -Zahl, wird die Kalibrierungskonstante für die nachfolgenden Messreihen festgelegt. Ein erneutes Einfügen ersetzt die vorherige Kalibrierungskonstante für die danach
folgenden Messreihen. Diese Kalibrierungskonstanten werden später mit dem Korrekturfaktor der 241 Am -Kalibrierung multipliziert. Hinter dem Pfad der Messreihen sind,
getrennt durch Semikola, weitere Angaben zur Messreihe bzw. zum Sensor gemacht, wie
z.B. die Gröÿe, Dicke und Bestrahlungsart. Die Reihenfolge und Formatierung müssen
bei der derzeitigen Version noch strikt eingehalten werden. Diese Angaben werden beim
Einlesen ebenfalls wie der Pfad ausgewertet und in Vektoren gespeichert.
Nach diesem Einlesen stehen alle Informationen zur weiteren automatischen Erstellung
der Graphen zur Verfügung. Anschlieÿend wird durch die Funktion ComputeResultFile()
nacheinander für jede Messreihe eine result.txt -Datei erstellt. Dabei wird zuerst überprüft, ob solch eine Datei bereits für die entsprechende Messreihe vorliegt. Wenn dieses
der Fall ist, wird mit der Funktion GrabResultFileContent() ihr Inhalt ausgelesen und in
die Ergebnisvektoren geschrieben. Die Ergebnisvektoren sind zweidimensional. Bei ihnen
läuft der erste Index, bzw. der äuÿere Vektor, über die in der userInputFile.txt angegebenen Messreihen. Der zweite Index, bzw. der innere Vektor, läuft über die einzelnen
Messungen bei den unterschiedlichen Spannungen. In Auistung 4.5 ist ein Beispieleintrag aus einer result.txt -Datei dargestellt. Dieser Eintrag wurde während der Messung
des Sensors FZ200N_04_DiodeS_15, bei einer angelegten Spannung von 10 V und einer
Temperatur von −20 ◦ C geschrieben.
Existiert diese Datei nicht, beginnt BetaAnalysis damit, für jeden Spannungsschritt den
59
4 Inbetriebnahme
Listing 4.4: Beispielhafter Inhalt der Datei userInputFile.txt. Eingerückte Zeilen entstehen durch Zeilenumbrüche die für die Darstellung benötigt werden und
sind so nicht in der Datei vorhanden.
#################################
#
userInputFile . txt
#
#################################
−
# <
this
is
#
format
is
#
location
a
comment
like
of
this :
signal
f o l d e r ; m a t e r i a l ( e p i , f z , mcz ) ; t h i c k n e s s ( "
micrometer ") ; diode
−t y p e ( n , p , y ) ;
t y p e ( 0 , p , n , pn = np ) ; g u a r d
#
separate
# make
#
columns
no
spaces
example
entry :
with
a
s i z e ( s , l ) ; d o s e ( " n e p /cm2 " ) ; r a d i a t i o n
ring
connected ( true , f a l s e )
;
#/d a t a /BETASETUP/ D e t e c t o r s / Epi100Y_01_DiodeL_3 / Temp_plus_20 / s i g n a l / ;
e p i ; 1 0 0 ; y ; l ; 4 E14 ; n ; f a l s e
# make
#
put
no
errors !
software
is
output
location
like
here
in
beta
state !
this :
#OUTPUT_LOCATION; / d a t a /BETASETUP/TEST/
OUTPUT_LOCATION; / d a t a /BETASETUP/ S o f t w a r e / B e t a A n a l y s i s _ v 1 _ 2 /
#
put
here
like
the
calibration
correction
factor
−
from
2 4 1Am C a l i b r a t i o n
this :
#CORRECTION= 1 . 1 2 3
#
this
factor
will
simple
multiplied
by
all
followed
to
translate
gains
CORRECTION= 1 . 0 0 7
#
put
a
gain
or
electrons
calibration
like
constant
−s i g n a l
ADC
to
this :
#G= 3 3 . 1 2 3
#
#
all
If
measurements
gain
is
you
put
be
given
a
after
in
gain
excluded
from
this
front
like
plots
of
this :
were
will
be
other
G=0
a
linked
to
this
gain
until
a
new
measurements .
gain
the
is
followed
measurements
will
required .
G= 4 2 . 7
# measurement
19
april
2012
/ d a t a /BETASETUP/ D e t e c t o r s / FZ200N_07_DiodeS_16 /Temp_minus_20/ s i g n a l _ 2
/ ; f z ; 2 0 0 ; n ; s ; 1 E15 ; p ; f a l s e
/ d a t a /BETASETUP/ D e t e c t o r s / FZ200N_07_DiodeS_16 /Temp_0/ s i g n a l _ 2 / ; f z
; 2 0 0 ; n ; s ; 1 E15 ; p ; f a l s e
Mittelwert des Pedestals und die Standardabweichung sowie deren Fehler durch einen
Gauÿ -Fit zu bestimmen und in die Ergebnisvektoren zu schrieben. Als Gauÿ -Fit wird
die Standard -Fit -Funktion gaus der ROOT -Bibliothek benutzt. Danach werden un-
60
4.4 Software
Listing 4.5: Beispieleintrag aus der result.txt -Datei für die Messung des Sensors
◦
FZ200N_04_DiodeS_15 bei −20 C und 10 V .
[ run_00001 . r o o t ]
RUN=1
c u r r e n t =1.4565 e
−07
diode_name=FZ200N_04_DiodeS_15
h i g h _ v o l t a g e =10
pedestal_Mean =176.172
pedestal_MeanError =0.343382
pedestal_Sigma =32.8934
pedestal_SigmaError =0.275583
signal_MPV = 3 3 6 . 3 4
signal_MPVError = 0 . 7 7 9 0 9 7
s i g n a l _ g a u s =41.0425
s i g n a l _ g a u s E r r o r =0.728825
s i g n a l _ s i g m a =12.6452
s i g n a l _ s i g m a E r r o r =0.416446
temperature =
t i m e=Tue
Apr
− 20.0027
3
17:18:16
2012
ter Verwendung der Klasse FitLandau durch eine Faltung aus einer Landau -Verteilung
mit einer Gauÿ -Verteilung der wahrscheinlichste Wert der Landau -Verteilung und die
Standardabweichungen der Landau - und Gauÿ -Verteilung sowie ihre Fehler berechnet.
Dieser Fit beruht auf dem Code der Convoluted Landau and Gaussian Fitting Function der ROOT -Bibliothek [PF12]. Dieses wird für alle Signal -Messungen der Messreihe
durchgeführt, und die Ergebnisse werden wieder in Ergebnisvektoren geschrieben. Anschlieÿend wird für jede Messreihe, für die noch keine result.txt -Datei besteht, diese
Datei erstellt. Dabei werden die entsprechenden Einträge der Ergebnisvektoren benutzt.
Zusätzlich wird die logbook -Datei der Signal -Messungen eingelesen und deren Inhalt
ebenfalls mit in die result.txt -Datei übernommen. Das letztliche Schreiben der Datei
erfolgt mit der Congurator -Klasse. Dadurch ist ein schnelles und einfaches Einlesen
dieser Ergebnisse für spätere Verwendungen möglich.
Nach dieser Vorarbeit kann im zweiten Schritt mit dem Erstellen der Graphen begonnen
werden. Dabei ergibt sich allerdings eine Problematik. Die Klassen für den Landau -Fit
des Signals wurden aus einem älteren C -Programm erstellt. Dieses ursprüngliche Programm ist nicht für das reihenweise Fitten von Histogrammen ausgelegt, sondern zum
Fitten eines einzelnen Histogramms. Dabei wird ein Fenster der TCanvas -Klasse auf
dem Bildschirm mit dem Histogramm dargestellt.
Bei der Benutzung in BetaAnalysis ergibt sich ein Problem, wenn wie empfohlen das Instantiieren der TApplication -Klasse bereits in der main() geschieht. Durch diese Klasse
wird die ROOT -Application -Environment gestartet und dadurch wird die Darstellung
von ROOT -Anwendungen auf dem Desktop möglich. Das Problem ist nun, dass es nicht
mehr möglich wäre BetaAnalysis in den Hintergrund des Desktops zu versetzen bzw. es
zu minimieren, denn bei jedem neuen Fit würde sich das aktuelle Histogramm wieder
in den Vordergrund stellen. Dadurch ist ein paralleles Arbeiten an dem Rechner nicht
61
4 Inbetriebnahme
möglich, wenn gleichzeitig BetaAnalysis läuft. Um dieses Problem zu umgehen, wird die
TApplication -Klasse erst im Constructor der PlotMaker -Klasse instantiiert. Dadurch
wird die ROOT -Application -Environment erst gestartet wenn die Fits bereits durchgeführt wurden. In einer Anwendung darf diese Klasse nur exakt einmal instantiiert
werden. Da diese Instantiierung allerdings bereits versteckt durch die FitClass -Klasse
geschieht, kommt es nach dem Beenden des letzten Fits und bei der Instantiierung der
PlotMaker -Klasse zu einer Fehlermeldung und BetaAnalysis hängt sich auf. Die Fehlermeldung ist in der Auistung 4.6 dargestellt. Dieser Konikt lässt sich derzeit nicht
vermeiden. Es ist jedoch möglich, BetaAnalysis mit der Tastenkombination Control + c
zu beenden und einfach neu zu starten. Bei dem erneuten Start liegen nun bereits alle
result.txt -Dateien vor, da diese geschrieben werden, bevor die PlotMaker -Klasse instantiiert wird. Dadurch muss kein Landau -Fit beim zweiten Start durchgeführt werden
und die TApplication Instantiierung geschieht ausschlieÿlich in der PlotMaker -Klasse.
Zusammengefasst heiÿt das, dass BetaAnalysis zwei mal nach einander gestartet werden
muss, wenn in der userInputFile.txt -Datei eine neue noch nicht analysierte Messreihe
eingetragen wird.
Listing 4.6: Fehlermeldung bei wiederholter Instantiierung der TApplication -Klasse.
Error
in
<T A p p l i c a t i o n : : T A p p l i c a t i o n >:
TApplication
only
one
instance
of
allowed
Das Instantiieren der PlotMaker -Klasse geschieht in einem neuen Thread. Durch die
dort aufgerufene MakePlots() -Funktion werden zunächst die result.txt -Dateien eingelesen und die Einträge in die Ergebnisvektoren der Klasse gespeichert. Anschlieÿend
wird die Ladungssammelezienz berechnet. Dazu wird bei allen Messungen jeglicher
Messreihen der Pedestal von dem Signal abgezogen und entsprechend wieder in einem
zweidimensionalen Ereignisvektor gespeichert. Hiernach werden die Kalibrierungskonstanten durch multiplizieren mit dem CORRECTION -Faktor korrigiert. Abschlieÿend
werden die fünf Graphen erstellt. Beim ersten Graphen wird die Ladungssammelezienz
in ADC -Einheiten über der angelegten Hochspannung aufgetragen. Für den zweiten Graphen wird diese Ladungssammelezienz noch mit den entsprechenden Kalibrierungskonstanten multipliziert, so dass sich die Ladungssammelezienz in der Einheit Elektronen
ergibt. Der dritte Graph stellt den Sensorstrom über der angelegten Hochspannung dar.
Im vierten Graphen ist das Rauschen über der angelegten Hochspannung dargestellt. Als
Wert des Rauschens werden hierbei die Standardabweichungen der Pedestal -Messungen
genommen. Der letzte Graph zeigt einfach den Verlauf des Pedestal -Mittelwertes mit
der angelegten Hochspannung.
In allen Graphen ist derzeit keine Korrektur für die am Sensor anliegende Spannung
berücksichtigt. Durch den steigenden Sensor -Strom nimmt der Spannungsabfall an den
Widerständen R2 und R5 in Abb. 3.7 zu und führt so zu einer geringeren anliegenden
Spannung am Sensor.
62
4.4 Software
Abbildung 4.17: Graphische Übersicht der BetaAnalysis -Software v1.2 mit ihren
wichtigsten Klassen
63
4 Inbetriebnahme
64
5 Messungen
5.1 Durchführung
Abb. 5.1 zeigt beispielhaft ein Histogramm des Pedestals. Dies wurde mit dem Sensor FZ200N_05_DiodeL_08 bei einer angelegten Hochspannung von 300 V, 20 ◦ C und
unter Bestrahlung der β -Quelle aufgenommen. Der blau eingezeichnete Fit durch eine
Gauÿ -Funktion weicht oberhalb von etwa 250 ADC -Einheiten etwas von der Verteilung
ab. Dies entsteht dadurch, dass gelegentlich während des zufällig vorgegebenen Gate -
Abbildung 5.1: Abgebildet ist der Pedestal, aufgenommen mit dem Sensor
FZ200N_05_DiodeL_08, bei einer angelegten Hochspannung von
300 V, 20 ◦ C unter Bestrahlung der β -Quelle. Die zugehörige Kalibrierungskonstante ist 33,1 e− /ADC und ergibt damit ein Rauschen von
1426 ± 13 e− .
65
5 Messungen
Signals ein β -Teilchen den Sensor trit. So wird ein Teil dieses Signals mit aufgenommen
und führt zu einer gröÿeren Häugkeit bei den höheren ADC -Werten. Bei Messungen
des Pedestals ohne β -Quelle ist diese deutliche Abweichung nicht vorhanden.
Die Abb. 5.2 zeigt ein Histogramm des MIP -Signals. Es wurde mit dem gleichen Sensor
und unter gleichen Bedingungen aufgenommen. Die rote Kurve zeigt die ans Histogramm gettete Faltung der Landau -Verteilung mit einer Gauÿ -Verteilung. Für beide
Histogramme wurden besonders viele Messpunkte aufgenommen. Beim Pedestal sind es
1,5 · 106 und beim Signal sogar 6,2 · 106 Einträge. Für normale Messungen reicht es, 105
Einträge pro Histogramm aufzunehmen, um den statistischen Fehler gegenüber den systematischen Fehlern vernachlässigen zu können. Der besonders groÿe Wert von χ2 /ndf
ist durch eine dierentielle Nichtlinearität des ADCs zu erklären. Im rechten Teil der
Abbildung ist dies zu sehen. Jeder sechzehnte Bin weist deutlich weniger Einträge auf,
und es ist auch eine gewisse systematische Häufung in anderen Bins zu erkennen. Diese
dierentielle Nichtlinearität hat durch den groÿen ADC -Bereich, über den sich die Signalverteilung erstreckt, nur einen vernachlässigbaren Einuss auf die Bestimmung des
wahrscheinlichsten Wertes der Landau -Verteilung. Daher wird hier nicht näher darauf
eingegangen. Der wahrscheinlichste Wert der Landau -Verteilung wird im Folgenden mit
Abbildung 5.2: Abgebildet ist das Signal der β -Teilchen, aufgenommen mit dem Sensor
FZ200N_05_DiodeL_08, bei einer angelegten Hochspannung von 300 V
und 20 ◦ C. Im rechten Teil ist die dierentielle Nichtlinearität des ADCs
verdeutlicht.
66
5.1 Durchführung
MPV Most Probable Value abgekürzt.
Es wurde entschieden, die ersten Messungen an kleinen Float -Zone -Sensoren vom n Typ mit 200 µm Dicke durchzuführen. Die kleinen Sensoren wurden gewählt, da bei
ihnen der Leckstrom geringer ist und dadurch auch das durch den Leckstrom generierte
Rauschen geringer ausfällt. Das Material und die Dicke wurden ausgewählt, da von dieser
Art sowohl unbestrahlte als auch drei Sensoren mit unterschiedlichen Bestrahlungsdosen
vorliegen. Die Bestrahlung erfolgte bei dem Sensor FZ200N_04_DiodeS_15 mit thermischen Neutronen bis zu einer Gesamtuenz von 1 · 1014 neq/cm2 . Die beiden anderen
Sensoren wurden mit 23 MeV -Protonen bestrahlt, der Sensor FZ200N_03_DiodeS_16
bis zu einer neutronenäquivalenten Gesamtuenz von 3 · 1014 neq/cm2 und der Sensor
15
2
FZ200N_07_DiodeS_16 bis 1 · 10 neq/cm . Alle Messungen wurden ohne Kontaktierung des Guard Rings durchgeführt.
Die drei bestrahlten Sensoren wurden nach den Einstellungen, wie in Kapitel 4 beschrieben, gemessen. Dabei entspricht die Gate -Dauer den standardmäÿigen 600 ns und die
Zeitabstimmung zwischen Gate -Anfang und Signal -Anfang auch den 65 ns. Allgemein
hat es sich herausgestellt, dass in dieser Konguration das Rauschen zu groÿ ist. Insbesondere der steigende Sensorstrom durch die gröÿer werdende Hochspannung führt zu
einem so groÿen Rauschen, dass es nicht möglich ist, den Pedestal oder das Signal im
ADC -Spektrum zu erkennen. Um eine Verbesserung des Signal -Rausch -Verhältnisses zu
erzielen, wurde vorläug eine Änderung der Gate -Dauer vorgenommen. Die Gate -Dauer
wurde auf 250 ns verkürzt und die vom Hersteller angegebenen 65 ns Zeitabstimmung verworfen. Das Signal fängt nun 15 ns vor dem Gate an. Das Maximum des Signals bendet
sich dann 85 ns nach dem Gate -Anfang. Mit diesen Einstellungen hat sich das Signal Rausch -Verhältnis verdoppelt und liegt nun bei etwa 39. Das Rauschen der Ausleseelektronik konnte auf 600 e− reduziert werden. In Abb. 5.3a ist die Ladungssammelezienz
über der angelegten Hochspannung aufgetragen. Alle vier Graphen wurden mit dem protonbestrahlten Sensor FZ200N_07_DiodeS_16 aufgenommen. Die ausgefüllten Marker
entsprechen Messungen bei −20 ◦ C, oenen Marker entsprechen Messungen bei 0 ◦ C.
Die viereckigen Messpunkte wurden mit den standardmäÿigen 600 ns aufgenommen, die
dreieckigen Messpunkte wurden mit der kürzeren Gate -Dauer von 250 ns aufgenommen.
Wie zu erwarten liegen die MPVs der Messungen mit kürzerer Gate -Dauer unter denen
mit längerer Gate -Dauer. Es zeigt sich aber auch ein gleichmäÿiger Verlauf der Graphen.
In Abb. 5.3c ist das entsprechende Rauschen über der angelegten Hochspannung aufgetragen. Es ist eine deutliche Verbesserung des Rauschens zu erkennen. Bei diesem stark
bestrahlten Sensor besteht bei hohen Spannungen allerdings immer noch die Tendenz zu
einem starken Ansteigen des Rauschens.
67
5 Messungen
(a)
(b)
(c)
Abbildung 5.3: Abb. (a) zeigt die Ladungssammelezienz über der angelegten Hochspannung. Abb. (c) zeigt das Rauschen über der angelegten Hochspannung. In Abb. (b) ist die Legende dargestellt.
68
5.2 Ergebnisse
5.2 Ergebnisse
Die Ergebnisse der Auswertung durch BetaAnalysis sind in den Abb. 5.4 und 5.5 dargestellt. Die dazugehörige Legende ist in Abb. 5.6 dargestellt. In den Abb. 5.4 ist die
Signalhöhe in ADC -Einheiten oben und Elektronen unten über der angelegten Hochspannung aufgetragen. Die beiden unbestrahlten Sensoren FZ200N_05_DiodeS_13
und FZ200N_07_DiodeS_14, die durch die runden, grauen Marker dargestellt sind,
zeigen das typische Verhalten von unbestrahlten Sensoren. Der schnelle Anstieg der
Ladungssammelezienz bei geringen Spannungen bis zum Erreichen eines Plateau bei
der vollständigen Verarmungsspannung von etwa 100 V ist typisch. Dass der dunkelgraue
Graph bei 580 V endet, liegt am Erreichen der Durchbruchspannung für diesen Sensor.
Dies ist deutlich in Abb. 5.5a zu erkennen.
Der mit 1 · 1014 neq/cm2 relativ gering durch Neutronen beschädigte Sensor
FZ200N_04_DiodeS_15 ist durch blaue Kreuze dargestellt. Er weist einen ähnlichen
Verlauf auf wie die ungeschädigten Sensoren. Es ist aber eine deutliche Verminderung
der Ladungssammelezienz festzustellen. Darüber hinaus ist der Knick beim Übergang
zum Plateau weniger markant ausgeprägt.
Der mit Protonen zu einer neutronenäquivalenten Gesamtuenz von 3 · 1014 neq/cm2
bestrahlte Sensor FZ200N_03_DiodeS_16 weist einen geringeren Anstieg der Ladungssammelezienz bei niedrigen Spannungen auf. Er erreicht allerdings fast dieselbe
Plateauhöhe, wie der weniger stark geschädigte, mit Neutronen bestrahlte Sensor. Das
Abbrechen des Graphen bzw. der extreme Anstieg der Ladungssammelezienz ab etwa
420 V entsteht durch eine plötzliche starke Steigerung des Rauschens. Dies ist in Abb.
5.5b zu sehen. Dadurch verschmiert der Pedestal so stark, dass der Gauÿ -Fit einen negativen Mittelwert ergibt. Dieses unphysikalische Ergebnis führt durch das Subtrahieren
vom MPV des Signals zu extrem groÿen Ladungssammelezienzen bei noch höheren
Spannungen. Das Einsetzen dieses Rauschens scheint sich mit einer Veränderung der
Stromkurve in Abb. 5.5a zu überschneiden. Dort lässt sich für die oenen, hell roten
Sterne der Übergang zu einem exponentiellen Anstieg des Stroms erkennen. Für die
gefüllten hell roten Sterne ist dieser Übergang ebenfalls zu erahnen.
Der am stärksten geschädigte Sensor FZ200N_07_DiodeS_16 mit einer neutronenäquivalenten Gesamtuenz von 1 · 1015 neq/cm2 zeigt bis 700 V keine Ausbildung eines
Plateaus. Die Ladungssammelezienz bleibt selbst bei 700 V noch deutlich unter der
des mit Neutronen bestrahlten Sensors. Die deutlich geringere Ladungssammelezienz
bei dem Graphen mit den oenen roten Dreiecken ist ebenfalls auf starkes Rauschen
zurückzuführen. Diese ist wieder in Abb. 5.5b zu erkennen. Dort liegen die Werte der
Messungen bei 0 ◦ C etwa drei mal höher als die bei −20 ◦ C gemessenen. Die schlechte
Bestimmung des Pedestals und Signals durch dieses starke Rauschen führt maÿgeblich
zu dieser Abweichung. Auch das scheinbar starke Ansteigen der Ladungssammelezienz
ab 600 V für die 0 ◦ C Messung ist auf das starke Rauschen zurückzuführen.
Die Messpunkte bei 0 V für die Ladungssammelezienzen in Abb. 5.4 sind, da die Sensoren bei 0 V nur die natürliche Sperrschicht besitzen, durch Rauschen dominiert. Die
durch die Messpunkte angegebenen Ladungssammelezienzen sind also unphysikalisch.
69
5 Messungen
(a)
(b)
Abbildung 5.4: Abb. (a) zeigt die Ladungssammelezienz in ADC -Einheiten. Abb. (b)
zeigt die Ladungssammelezienz in Elektronen. Die Legende ist in Abb.
5.6 gegeben.
70
5.2 Ergebnisse
(a)
(b)
Abbildung 5.5: Abb. (a) zeigt den gemessenen Sensorstrom ohne Guard Ring Kontaktierung. Abb. (b) zeigt das Rauschen der Pedestal -Messungen.
71
5 Messungen
Abbildung 5.6: Diese Legende gilt für Abb. 5.4 und 5.5.
72
6 Zusammenfassung und Ausblick
Zusammenfassung
Im Rahmen dieser Diplomarbeit wurde ein β -Messstand zur genauen Untersuchung der
Ladungssammelezienz von Pad -Sensoren beim Passieren von minimal ionisierenden
Teilchen (MIP) aufgebaut und in Betrieb genommen. Es wurde das Konzept zur Triggerauswahl von MIPs aus dem Spektrum der 90 Sr -Quelle erläutert. Dabei wurde gezeigt,
dass der Wert für die am wahrscheinlichsten deponierte Energie des getriggerten MIP Spektrums im Sensor bis auf 5 % an den Wert für ideale MIPs heranreicht.
Für die Inbetriebnahme des β -Messstandes wurden zwei unabhängige Kalibrierungen
für beide Auslesekanäle durchgeführt. Bei der ersten Methode wurde eine Kombination aus einem Signalgenerator und verschiedenen Abschwächern benutzt, um mit dieser
eine variierbare Testladung in die Ausleseelektronik einzubringen. Die Gröÿe der Testladung konnte mit einer Genauigkeit von etwa 1 % berechnet werden, und zusammen
mit der gemessenen Signalhöhe wurde die Bestimmung einer Kalibrierungskonstanten
erläutert. Mit Kenntnis dieser Kalibrierungskonstanten lieÿ sich die gemessene Signalhöhe beim Durchgang eines MIPs durch den Sensor in erzeugte Elektron -Loch -Paare
umrechnen. Weiter wurde eine Korrektur der einzelnen Abschwächungsstufen durchgeführt und damit unter anderem gezeigt, dass die Ausleseelektronik über den gesamten
relevanten Messbereich als linear angenommen werden kann. Bei dieser Kalibrierung war
der Signalverlauf identisch mit dem Signalverlauf im Messbetrieb, da das Triggersignal
ebenfalls durch den Signalgenerator erzeugt werden konnte.
Für die zweite Methode wurden 59,54 keV γ -Quanten einer 241 Am -Quelle benutzt. Die
γ -Quanten, die im Sensor auf ein Elektron treen, übertragen ihre Energie und den
Impuls auf dieses. Das Elektron bewegt sich daraufhin durch den Sensor und erzeugt
durch Ionisierung von Gitteratomen Elektron -Loch -Paare, solange bis es seine Energie
vollständig abgegeben hat. Somit wird durch die Energie des γ -Quants immer nahezu
die gleiche Anzahl von Elektron -Loch -Paaren generiert, und mit Kenntnis der Bindungsenergie von Valenzelektronen im Silizium -Sensor lieÿ sich diese Anzahl der Elektron -Loch -Paare berechnen. Für diese Kalibrierung wurde ein unbestrahlter, vollständig
verarmter Silizium -Sensor benutzt und daher davon ausgegangen, dass immer alle erzeugten Elektron -Loch -Paare durch die Ausleseelektronik gesammelt werden. Aus der
Anzahl der erzeugten Elektron -Loch -Paare und der gemessenen Signalhöhe lieÿ sich
ebenfalls eine Kalibrierungskonstante bestimmen. Bei dieser 241 Am -Kalibrierung musste der Signalverlauf geändert werden, um auf das Signal selbst zu Triggern. Um somit
einen Vergleich mit der ersten Methode tätigen zu können, wurde eine erneute Kalibrierung mit dem Signalgenerator in dieser Konguration durchgeführt. Die Abweichung
73
6 Zusammenfassung und Ausblick
beider Kalibrierungen betrug nur 0,7 % und konnte auf die Ungenauigkeit des Kalibrierungskondensators und des Signalniveaus zurückgeführt werden, die zur Berechnung der
eingebrachten Testladung benutzt wurden. Diese Ungenauigkeiten wurden in einem Korrekturfaktor zusammengefasst und ermöglichten so die Korrektur der Kalibrierungen mit
dem Signalgenerator.
Die absolute Genauigkeit für die Messung der Signalhöhen von den MIPs wurde auf
0,4 % abgeschätzt.
Weiter wurde die Bestimmung des Signal -Rausch -Verhältnisses erläutert und kurz auf
eine Verbesserung dieses Verhältnisses durch ein Verkürzen der Gate -Signaldauer eingegangen. Das Signal -Rausch -Verhältnis konnte so bis auf etwa 39 gebracht werden und
das Rauschen der Ausleseelektronik wurde auf etwa 600 e− reduziert.
Die zur Datenaufzeichnung geschriebene Software BertaControl ermöglicht die Durchführung von automatischen Messreihen in einem vom Benutzer vorgegebenen Spannungsbereich. Dabei kann auf die Spannungsschrittgröÿe, die Anzahl der gesammelten
Datenpunkte pro Spannungsschritt, die Temperatur und den Schutz vor zu groÿen Sensorströmen Einuss genommen werden. BertaControl erzeugt für jede Messreihe eine
logbook -Datei, in der alle aufgenommenen Parameter für jeden Spannungsschritt dokumentiert sind.
Für die einfache automatische Datenanalyse wurde die Software BetaAnalysis geschrieben. BetaAnalysis führt einen Gauÿ -Fit an den Pedestal -Messungen und einen Fit durch
eine Faltung aus einer Landau -Verteilung mit einer Gauÿ -Verteilung an den Signal Messungen durch. Die Ergebnisse werden in fünf Graphen dargestellt.
Ausblick
Um mit dem β -Messstand Messungen an geschädigten Sensoren mit Fluenzen jenseits
der 1 · 1015 neq/cm2 durchführen zu können, muss das durch den Sensorstrom generierte
Rauschen weiter minimiert werden. Dazu müssen die verschiedenen Methoden, wie z.B.
die Guard Ring -Kontaktierung oder das Vergröÿern der Vorverstärker -Widerstände mit
ihren Vor - und Nachteilen überdacht werden.
Weiter sollte die Qualität des Fits mit der Landau -Gauÿ -Faltung durch BetaAnalysis näher überprüft werden. Dabei sollte insbesondere Augenmerk auf die ersten Fits
einer Messreihe gelegt werden. Eine deutliche Verbesserung dieser Fits würde hierbei
durch eine exible Vorgabe der Startparameter erreicht werden. Dieses würde auch zu
einer Verkürzung der Berechnungszeit führen. Weiter sollte die Genauigkeit der Fits bei
groÿem Rauschen überprüft werden und evtl. der Vergleich zu einer anderen Methode
für die Bestimmung des wahrscheinlichsten Wertes der Signalverteilung gesucht werden.
Ebenfalls sollte eine Korrektur der am Sensor anliegenden Spannung in BetaAnalysis
implementiert werden, um den Spannungsabfall bei groÿen Sensorströmen durch die
Vorverstärker -Widerstände zu kompensieren.
Um das ungewollte Überschreiben von Daten durch falsche Benutzereingaben zu verhindern, sollte eine Abfrage sowohl in BetaControl als auch BetaAnalysis implementiert
werden. Diese könnte z. B. einfach prüfen, ob der angegebene Ausgabeordner leer ist,
und falls nicht eine Warnung ausgeben.
74
Wie schon in Abschnitt 4.4.1 erwähnt, könnte durch eine einfache elektronische Schaltung die Gefahr des unkontrollierten Aufheizens der Auageäche vermieden werden.
Durch den Austausch der Koinzidenzeinheit mit einer über den PC steuerbaren könnte
mit der entsprechenden Erweiterung von BetaControl das etwa halbstündliche manuelle
Umschalten der Koinzidenzeinheit vermieden werden. So wäre es möglich, für einen einmal aufgelegten und kontaktierten Sensor automatisch bei verschiedenen Temperaturen
sowohl die Pedestal - als auch die Signal -Messungen durchzuführen. Eine solche vollautomatische Messung würde dann bei zwei Messtemperaturen nach etwa zwei Stunden
beendet sein. Um die Automation noch zu erweitern, könnte das automatische Fitten
der Messergebnisse nach dem Beenden einer Messreihe implementiert werden.
Falls es sich herausstellen sollte, dass es nicht möglich ist mit dem benutzten ladungsintegrierenden ADC sehr stark bestrahlte Sensoren messen zu können, sollte überlegt werden,
ihn gegen einen peaksensitiven -ADC auszutauschen. Wenn für den peaksensitiven -ADC
eine Datenaufnahme -Software existiert, die ebenfalls auf der ROOT -Bibliothek aufbaut,
wäre eine Implementierung in BetaControl und BetaAnalysis relativ einfach zu realisieren.
Die Quellcodes von BetaControl und BetaAnalysis sowie das ursprüngliche DAQ Programm und das Landau -Fit -Programm benden sich auf dem Messrechner 15 in
dem Verzeichnis /data/BETASETUP/Software/source_code. Die Software wurde unter
Verwendung der Entwicklungsumgebung NetBeans v6.9.1 und der Versionsverwaltung
Bazaar v2.1.4 geschrieben.
In dem Verzeichnis /data/BETASETUP/Manuals bendet sich eine Sammlung aller Bedienungsanleitungen und Datenblätter, die für den β -Messstand von Bedeutung sind.
75
6 Zusammenfassung und Ausblick
76
Abbildungsverzeichnis
2.1 Dargestellt sind die Energiebänder eines Isolators, Halbleiters und Metalls. Der Isolator weist die gröÿte Bandlücke auf, gefolgt von dem Halbleiter. Bei Metallen ist das Leitungsband teilweise gefüllt. . . . . . . . . . 9
2.2 Die Abbildung zeigt das Bänderschema bei dotierten Halbleitern. [Lau11] 10
2.3 Darstellung des p-n -Übergangs [Wik11a] . . . . . . . . . . . . . . . . . . . 12
2.4 Die Abbildung zeigt einen groÿen und einen kleinen Pad -Sensor der CEC Messkampagne. Der kleine Sensor wurde nur an drei Seiten auf Maÿ geschnitten. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1 Prinzip des β -Messstandes: die β -Teilchen treten aus der 90 Sr -Quelle aus
und treen kollimiert auf den Sensor. Die Triggerauswahl wird unter Verwendung zweier Szintillatorzähler getroen. . . . . . . . . . . . . . . . .
3.2 Foto des Versuchsstands. Mittig auf dem Tisch bendet sich der mechanische Aufbau, links im Rack ein Groÿteil der Elektronik, unter dem Tisch
das Kühlsystem und die Vakuumpumpe, rechts der PC. . . . . . . . . .
3.3 AutoCAD-Zeichnung des mechanischen Aufbaus [Sch11] . . . . . . . . .
3.4 AutoCAD-Querschnittzeichnung des mechanischen Aufbaus [Sch11] . . .
3.5 Die schwarze, gepunktete Linie stellt das Spektrum aller β -Teilchen dar,
die aus der Quelle austreten und auf den Sensor auftreen. Die darunter
liegende grüne Linie entspricht dem Spektrum der β -Teilchen, die den
Sensor verlassen und auf den ersten Szintillatorzähler treen. Die gelbe
Fläche unter der blauen Linie zeigt mit einem Faktor 50 multipliziert das
Spektrum auf das getriggert wird. [Sch10b] . . . . . . . . . . . . . . . .
3.6 Die schwarze, gepunktete Linie stellt das Spektrum aller β -Teilchen dar,
die aus der Quelle austreten und auf den Sensor auftreen. Die gelbe
Fläche unter der blauen Linie stellt das Spektrum der β -Teilchen dar,
auf die getriggert wird. Die rote, gestrichelte Linie stellt zum Vergleich
das Spektrum von Myonen mit einem Impuls von 0,37 GeV/c dar. Bei
diesem Impuls können die Myonen als ideale MIPs angesehen werden.
Die Abweichung der getriggerten β -Teilchen von diesem idealen MIP Spektrum beträgt etwa 5 %. [Sch10b] . . . . . . . . . . . . . . . . . . . .
3.7 Schaltplan des Vorverstärkers mit kontaktiertem n -Typ -Sensor . . . . .
3.8 Schaltplan des Shapers . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. 15
. 16
. 17
. 18
. 21
. 22
. 24
. 25
77
Abbildungsverzeichnis
4.1 Dargestellt ist der Signalverlauf des β -Messstandes. Im unteren Bereich
bendet sich die Elektronik zur Testsignalerzeugung. Für die Kalibrierung
des elektronischen Kanals und den normalen Messbetrieb mit β -Quelle
wird das Signal nicht durch die Linea -fan -out -Einheit geführt, dies ist
durch die rote gestrichelte Linie angedeutet. Die Linea -fan -out -Einheit
wird bei der physikalischen Kalibrierung benutzt, um auf das Signal selbst
zu Triggern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Aufgetragen sind das Rauschen als rote Punkte und Signal -Rausch Verhältnis als blaue Vierecke in Abhängigkeit von der Gate -Signallänge.
Oben benden sich die Messungen mit dem nicht invertierenden Kanal,
unten mit dem invertierenden Kanal. . . . . . . . . . . . . . . . . . . . . .
4.3 Die Abbildung zeigt den Screenshot des Oszilloskops. Zu sehen ist die
relative Position des Gate -Signals zum Signal. Die horizontale Einheit
pro Kästchen entspricht 100 ns, vertikal entspricht sie 10 mV pro Kästchen.
4.4 Schaltung der Kapazitäten bei der Kalibrierung . . . . . . . . . . . . . . .
4.5 Durch den Widerstand und den Kalibrierungskondensator wird das Rechtecksignal dierenziert und in eine Art Sägezahn -Signal verwandelt. . . . .
4.7 Ergebnisse bei 496 mV Signalniveau: (a) Kalibrierung mit Saphir -Sensor
und (b) Dierenz gemessener minus angepasster Wert mit Saphir -Sensor.
4.9 Die Abbildung zeigt das mit dem ADC gemessene Spektrum der
241 Am -Quelle. Der groÿe Peak entspricht der 59,54 keV γ -Linie. Der kleine Peak bei 250 ADC -Einheiten entsteht durch Rauschen. . . . . . . . . .
4.10 Die Abbildung zeigt die Veränderung des Peak -Mittelwertes in Abhängigkeit von der linken Grenze für den Fitbereich. . . . . . . . . . . . . . .
4.11 Kalibrierungsergebnisse mit unterschiedlichen kontaktierten Sensorkapazitäten. Die Konguration des β -Messstandes entspricht der Konguration in Abb. 4.9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.12 Schaltbild zur Bestimmung der eektiven Eingangskapazität des Vorverstärkers Cinp . Vorhandene Streukapazitäten sind mit in der eektiven Eingangskapazität berücksichtigt. . . . . . . . . . . . . . . . . . . . . . . . . .
4.13 Aufgetragen sind die eektiven Kalibrierungskonstanten über der zum
Vorverstärker geschalteten eektiven Kapazität. Die beiden blauen Messpunkte bei etwa 14 pF und 20 pF entsprechen dem Mittelwert der entsprechenden Kalibrierungen aus Abb. 4.11 mit dem Saphir -Sensor und dem
CC1325 -Sensor. Der rote Punkt bei 0 pF ergibt sich durch die Anpassung
einer linearen Funktion und entspricht der theoretischen Kalibrierungskonstanten. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.14 Graphische Benutzeroberäche der BetaControl -Software v1.5.1 . . . . . .
4.15 Graphische Übersicht der BetaControl -Software v1.5.1 mit ihren wichtigsten Klassen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.16 Aktivitätsdiagramm der BetaControl -Software v1.5.1 . . . . . . . . . . . .
4.17 Graphische Übersicht der BetaAnalysis -Software v1.2 mit ihren
wichtigsten Klassen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
78
29
31
32
36
37
40
44
45
46
47
49
51
53
54
61
Abbildungsverzeichnis
5.1 Abgebildet
5.2
5.3
5.4
5.5
5.6
ist
der
Pedestal, aufgenommen mit dem Sensor
FZ200N_05_DiodeL_08, bei einer angelegten Hochspannung von 300 V,
20 ◦ C unter Bestrahlung der β -Quelle. Die zugehörige Kalibrierungskonstante ist 33,1 e− /ADC und ergibt damit ein Rauschen von 1426 ± 13 e− .
Abgebildet ist das Signal der β -Teilchen, aufgenommen mit dem Sensor
FZ200N_05_DiodeL_08, bei einer angelegten Hochspannung von 300 V
und 20 ◦ C. Im rechten Teil ist die dierentielle Nichtlinearität des ADCs
verdeutlicht. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Abb. (a) zeigt die Ladungssammelezienz über der angelegten Hochspannung. Abb. (c) zeigt das Rauschen über der angelegten Hochspannung. In
Abb. (b) ist die Legende dargestellt. . . . . . . . . . . . . . . . . . . . . .
Abb. (a) zeigt die Ladungssammelezienz in ADC -Einheiten. Abb. (b)
zeigt die Ladungssammelezienz in Elektronen. Die Legende ist in Abb.
5.6 gegeben. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Abb. (a) zeigt den gemessenen Sensorstrom ohne Guard Ring Kontaktierung. Abb. (b) zeigt das Rauschen der Pedestal -Messungen. . . . . . . . .
Diese Legende gilt für Abb. 5.4 und 5.5. . . . . . . . . . . . . . . . . . . .
63
64
66
68
69
70
79
Abbildungsverzeichnis
80
Tabellenverzeichnis
4.1 Messfehler des Oszilloskopes . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 In der Tabelle sind am Beispiel der 17 dB -Abschwächung die Zwischenergebnisse für die Ermittlung des korrigierten Abschwächungswertes dargestellt. Die oberen sechs Zeilen entsprechen der Kalibrierung mit einem
Spannungsniveau von 996 mV, die unteren beiden mit 498 mV. Die Fehler
in allen Steigungen a entsprechen ± 0,000 003 ADC/e− , in den Schnittpunkten mit der y -Achse b sind sie ± 0,18 ADC. Die Genauigkeit der Qf it
ergibt sich so zu 0,02 %. . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 In der Tabelle sind die für die Kalibrierung des elektronischen Kanals
benutzten nominellen Werte der variablen Abschwächungseinheit BMA35110 von Trilithic Broadband Instruments [Tri12] mit der vom Hersteller
angegebenen Genauigkeit in der ersten Spalte aufgelistet. In der zweiten
Spalte stehen die nach Gleichung (4.8) ermittelten korrigierten Abschwächungen. Die letzte Spalte enthält die Dierenz zwischen den korrigierten
und nominalen Abschwächungen. . . . . . . . . . . . . . . . . . . . . . .
4.4 Zuordnung der Farben für die Abb. 4.11 . . . . . . . . . . . . . . . . . .
. 34
. 40
. 41
. 46
81
Tabellenverzeichnis
82
Literaturverzeichnis
[Amp12] Amptek,
Inc.: Datasheet/Specication Charge Sensitive Preampli, January 2012.
http://www.amptek.com/pdf/a250.pdf
www.amptek.com/pdf/a250f.pdf. 23
er
A250F
[Ana12] Analog Devices, Inc:
Datasheet Low Power 350 MHz Voltage Feedback Am-
, April 2012. www.analog.com/static/importedles/data_sheets/AD8038_8039.pdf. 26
pliers AD8038/AD8039
[Bas06]
Basunia, M. S.: Nuclear
, 2006. 43
data sheets 107, 3323
[BGK10] Bichsel, H., D.E. Groom, and S.R. Klein: Passage of particles through matter.
Particle Data Group, 2010. 20, 29
[C.A12a] C.A.E.N. Technologies, Inc: Technical Information Manual Model N93B
Dual Timer, April 2012.
http://www.caen.it/servlet/checkCaenManual
File?Id=5239. 20
[C.A12b] C.A.E.N. Technologies, Inc: Technical Information Manual Model N96 8Fold Fast Discriminator, April 2012.
http://ohm.bu.edu/ pbohn/RE
PAIR__Advanced_Lab/caen_discriminator/caen_mod96_discrim.pdf. 20
[C.A12c] C.A.E.N. Technologies, Inc.:
VME
Line
Technical
Information
Man-
, April 2012.
http://www.caen.it/jsp/Template2/LibrarySearchResults.jsp?browse=n&key
words=v265. 20, 26
ual
[Con12]
Model
V265
8
Channel
Charge-Integrating
ADC
Conrad
Electronic
SE:
Bedienungsanleitung
8fach-Relaiskarte
16
A,
April 2012.
http://www.produktinfo.conrad.
com/datenblaetter/175000-199999/197730-an-01-l-8_K_RELAISKARTE_
PC230V_AC16A_de_en_fr_nl.pdf. 20, 52
230
V/AC
[Dem05] Demtröder, Wolfgang: Exterimentalphysik 3: Atome, Moleküle und Festkörper.
Springer, 2005. 9
[Dev85]
Devaney, Joseoh J.: The Beta Spectra of 90
38 Sr and
Database LA-10467-MS UC-34, August 1985. 19
90 Y
39
. Energy Citations
83
Literaturverzeichnis
[Erf11]
Ere, Joachim: Silicon Sensor Developments for the CMS
In: Proceedings of Science, July 2011. PoS(RD11)020. 13
.
[Föl12]
Föll, Prof. Dr. Helmut: Electronic Materials.
http://www.tf.unikiel.de/matwis/amat/elmat_en/index.html, April 2012. 10, 11, 12
Tracker Upgrade
[Ham12] Hamamatsu Photonics K. K.: Datasheet Multianode Photomultiplier Tube
R5900U-03-M4, April 2012. http://www.datasheetarchive.com/R5900U-03M4-datasheet.html. 22
[Hew12a] Hewlett-Packard Company, L.P.: Manual HP E3600-series Power Supplies, April 2012.
http://www.metrictest.com/catalog/pdfs/product_pdfs
/hp_e3600.pdf. 23, 26
[Hew12b] Hewlett-Packard Company, L.P.:
Reference
Guide
HP/Agilent
81104A
, April 2012.
http://www.home.agi
lent.com/agilent/redirector.jspx?action=ref&cname=AGILENT_EDITORI
AL&ckey=1000001776.00. 20
80
MHz
Pulse/Pattern
Generator
[JUM12] JUMO GmbH & Co. KG:
Datenblatt
Platin-Chip-Temperatursensoren
, April 2012.
http://
www2.jumo.de/news/newsletter/Newsletter/2003_04/2003_04_P5/pdf/t90
.6121d.pdf. 18, 20
mit
Anschlussdrähten
nach
DIN
EN
60
751
[Kei12a] Keithley Instruments, Inc.: User's Manual Model 2700 Multimeter/Switch
System, April 2012.
http://www.keithley.com/products/dcac/dmm/dmms
/?mn=2700. 20, 52
[Kei12b] Keithley Instruments, Inc.: User's Manual Model 6517B Electrometer, April
2012. http://www.keithley.com/data?asset=52042. 20, 23, 52
[Lau11]
Laube, Philipp: Halbleitertechnologie von A bis Z. http://www.halbleiter.
org/grundlagen/dotieren/, June 2011. 10, 11, 75
[LAU12] LAUDA
KG: Bedienungsan, April 2012.
http://www.lauda.de/hosting/lauda/website_de.nsf/urlnames/SPOR-855
FAT/$le/YACE0087_c2_ECO_Silver_10-09-21_Internet.pdf. 18, 20, 52
leitung
Dr.
R.
Wobser
Temperiergerät
ECO
GmbH
Silver
&
Co.
RE
1050
[LeC12a] LeCroy Corporation: Specications NIM Model 428F Quad Linear FanIn/Fan-Out, April 2012. http://www.lecroy.com/lrs/dsheets/428.htm. 20
[LeC12b] LeCroy Corporation: Specications NIM Model 465 Triple 4-Fold Logic
Unit, April 2012. http://www-esd.fnal.gov/esd/catalog/main/lcrynim/465spec.htm. 20
84
Literaturverzeichnis
[Lut99]
Lutz, Gerhard: Semiconductor
[Oly12]
Olympus
[PF12]
Radiation Detectors
. Springer, 1999. 12
Deutschland GmbH: Bedienungsanleitung SZ51 ZoomStereomikroskop, April 2012. https://extranet.sher.co.uk/webles/fr/Pjoint
es/Mdemploi/OLY001_DE%20Stereomikroskop%20SZ61-51%20DE.pdf. 17
Pernegger, Heinz und Markus Friedl: Convoluted Landau and Gaussian Fitting
, April 2012. http://root.cern.ch/root/html/tutorials/t/langaus
.C.html. 59
Function
[Rob12]
RoboterNETZ: Regelungstechnik. http://www.rn-wissen.de/index.php/Regel
ungstechnik, 2012. 57
[Sch10a] Schuwalow, Sergej: Trigger
[Sch10b] Schuwalow, Sergej:
29, 75
counter for
Triggerin in
90 Sr Setup.
90 Sr Setup.
[Sch11]
Schuwalow, Sergej: AutoCAD-Zeichnung
Messstandes, May 2011. 17, 18, 75
[Spi05]
Spieler, H.: Semiconductor
24, 33
[Spi10]
Spieler, H.: Particle
34, 43
[TDK12] TDK-Lambda
Interes Papier, 2010. 20, 21, 22,
des mechanischen Aufbaus des
Detector Systems
detectors at accelerators
Germany
GmbH:
Interes Papier, 2010. 21
β-
. Oxford University Press, 2005.
. Particle Data Group, 2010. 23,
Bedienungsanleitung
Programmier-
, April 2012.
http://www.de.tdklambda.com/KB/129554560274013750_ZUPM.pdf. 20, 52
bare
Stromversorgung
ZUP
20-10
[Tek12]
Tektronix, Inc: User Manual TDS 220-Series Digital Real-Time Oscilloscope,
April 2012. http://www.tequipment.net/pdf/tektronix/TDS200_UserManu
al.pdf. 20
[Tel12]
Telmeter Electronic GmbH: Datenblatt Peltier-Element PE Serie, April
2012. http://www.telemeter.info/documents/mittelbohrungpeltierelemente
_pe.pdf. 20
[Ten83]
Tennelec Inc.: Instruction
23
[Tri12]
Trilithic Broadband Instruments, Inc: Datasheet Benchtop Attenuator BMA35110, April 2012. http://www.trilithic.com/RFs/BMA_35110.pdf. 32, 34,
41, 79
Manual TC 952 High Voltage Power Supply
, 1983.
85
Literaturverzeichnis
[Wen]
Wentworth Laboratories Inc.: Datasheet
. 23
Standard Mini Blade Style J
[WIE09] WIENER Plein & Baus GmbH: VM-USB User Manual, July 2009.
http://www.wiener-d.com/Support/XXUSB/Manual_VM-USB_4_0_1.
pdf. 26
[WIE12] WIENER Plein & Baus GmbH: Manual VME 195 Mini Crate, April 2012.
www.wiener-d.com/documents/manuals/Manual_VME195.pdf. 26
[Wik11a] Wikipedia: p-n
2011. 12, 75
junction
. http://en.wikipedia.org/wiki/P-n_junction, May
[Wik11b] Wikipedia: Strontium. http://de.wikipedia.org/wiki/Strontium, May 2011. 19
[Wik12] Wikipedia: Versa Module Eurocard
/wiki/VMEbus, April 2012. 26
86
Bus (VMEBus)
. http://de.wikipedia.org
Erklärung
Hiermit versichere ich, dass ich die vorliegende Diplomarbeit selbstständig verfasst und
keine anderen als die angegebenen Quellen und Hilfsmittel benutzt habe. Mit einer Ausleihe meiner Arbeit bin ich einverstanden.
Hamburg, den 23. Mai 2012