Machines Electriques Elektrische Maschinen
Werbung

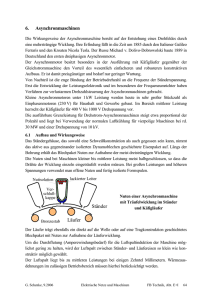
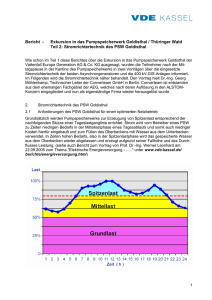
Machines Electriques Elektrische Maschinen Die Asynchronmaschine Inhalt Aufbau der Drehstrom-Asynchronmaschine .................................................................................................................. 3 1 1.1 1.2 Aufbau (Buch Seite 259/260) .................................................................................................................................... 3 Die Entstehung des Ständerfelds ............................................................................................................................... 4 Wirkungsweise der Drehstrom-Asynchronmaschine ..................................................................................................... 9 2.1 2.2 2.3 2.4 Wiederholung: Generatorprinzip / Motorprinzip / Induktionsgesetz ......................................................................... 9 Trafohauptgleichung.................................................................................................................................................. 9 Drehmomentbildung beim Drehstrom-Asynchronmotor ......................................................................................... 13 Schlupfdrehzahl und Schlupf................................................................................................................................... 14 Betriebsverhalten der Drehstrom-Asynchronmaschine ................................................................................................ 17 2 3 3.1 Läuferfrequenz und Läuferspannung ....................................................................................................................... 17 3.1.1 Läuferfrequenz und Läuferspannung ............................................................................................................. 17 3.1.2 Läuferfrequenz – und Spannung in Funktion vom Schlupf: Uq2, f2 = f(s)..................................................... 17 3.2 Ersatzschaltbild der Drehstrom-Asynchronmaschine .............................................................................................. 18 3.3 Läuferstrom und Läuferleistungsfaktor (siehe Buch Seite 269) .............................................................................. 19 3.3.1 Läuferstrom .................................................................................................................................................... 19 3.3.2 Läuferleistungsfaktor ..................................................................................................................................... 19 3.3.3 Verlauf von Läuferstrom und Läuferleistungsfaktor in Abhängigkeit vom Schlupf...................................... 20 3.4 Drehmoment in Abhängigkeit vom Schlupf ............................................................................................................ 22 3.4.1 Herleitung der Drehmomentformel ................................................................................................................ 22 3.4.2 Verlauf des Motordrehmoments in Abhängigkeit vom Schlupf (Hochlaufkennlinie) ................................... 23 3.4.3 Zusammenhang zwischen Kippmoment und Kippschlupf (Kippdrehzahl).................................................... 24 3.4.4 Verlauf des Ständerstromes............................................................................................................................ 24 4 Kennlinien des Drehstrom-Asynchronmotors .............................................................................................................. 24 4.1 4.2 Belastungskennlinien (siehe Laborversuche ASM-1,2 und Buch Seite 282, Bild 4.101)........................................ 24 Hochlaufkennlinien (siehe nachfolgendes Beispiel und Buch Seite 285, Bild 4.105) ............................................. 24 Anlassen von Drehstrom-Asynchronmotoren .............................................................................................................. 27 5.1 5.2 5.3 Zweck des Anlassens (siehe Buch Seite 284 und 285 mit Anlaufschwere)............................................................. 27 Y/∆-Anlassverfahren ............................................................................................................................................... 27 Weitere Anlassverfahren (siehe Buch Seite 285 ff.) ................................................................................................ 27 Drehzahlsteuerung von Drehstrom-Asynchronmotoren ............................................................................................... 30 6.1 6.2 6.3 6.4 6.5 Übersicht (siehe Buch Seite 295 ff.) ........................................................................................................................ 30 Drehzahlsteuerung durch Verändern der Schlupfwiderstände................................................................................. 30 Drehzahlsteuerung durch Verändern der Polpaarzahl.............................................................................................. 32 Drehzahlsteuerung durch Verändern der Ständerspannung ..................................................................................... 33 Drehzahlsteuerung über die Frequenz ..................................................................................................................... 33 Bremsverfahren von Drehstrom-Asynchronmotoren ................................................................................................... 37 7.1 7.2 7.3 7.4 8 Mechanisches Bremsen (siehe Buch Seite 308) ...................................................................................................... 37 Gegenstrombremsung (siehe Buch Seite 309) ......................................................................................................... 37 Gleichstrombremsung (siehe Buch Seite 309/310).................................................................................................. 38 Generatorisches Bremsen (siehe Buch Seite 310) ................................................................................................... 40 Fehler an Drehstrom-Asynchronmotoren (siehe Buch Seite 386) ................................................................................ 41 9 Der Einphasen-Asynchronmotor .................................................................................................................................. 42 5 6 7 9.1 9.2 9.3 MACEL Drehfelderzeugung bei zweisträngigen Wicklungen ............................................................................................... 42 Schaltungen zur Erzeugung von Drehfeldern mit Einphasen-Wechselspannung .................................................... 43 Der Kondensatormotor (siehe Buch Seite 316 ff.)................................................................................................... 43 ASYNCHRONMASCHINE 2 Drehstrom-Asynchronmaschine 1 Aufbau der Drehstrom-Asynchronmaschine 1.1 Aufbau (Buch Seite 259/260) Erklärungen: 1: 8: 2: 9: 3: 10: 4: 11: 5: 12: 6: 13: 7: Klemmenbezeichnungen und Schaltsymbole: MACEL ASYNCHRONMASCHINE 3 1.2 Die Entstehung des Ständerfelds In der Ständerwicklung wird mit Hilfe eines 3~Wechselstroms ein magnetisches Drehfeld erzeugt. Die drei Stränge der Drehstromwicklung sind räumlich um 120° versetzt angeordnet. Die Ströme in den drei Strängen sind zeitlich um 1/3 Periode (120° elektrisch) phasenverschoben. Auf Seite 5 wird die Entstehung des Ständermagnetfeldes am Beispiel eines zweipoligen Ständers erklärt. Betrachtet man die Schnittbilder für Zeitpunkte I bis IV, so erkennt man, dass das Ständerfeld ein Drehfeld ist. Bei Anschluss von L1, L2, L3 an U, V, W ergibt sich ein rechtsdrehendes Ständerfeld. Bei vertauschen von zwei Leitern ein Linksdrehendes. Polteilung τp Die Polteilung τp gibt die Bogenlänge in m zwischen zwei benachbarten Polen an: τp = mit: D⋅π 2p D: Bohrungsdurchmesser des Ständerblechpakets in m p: Polpaarzahl Räumlicher Winkel αr zwischen zwei Polen Die Polteilung entspricht dem räumlichen Winkel αr zwischen zwei Polen: αr = 360° 2p Elektrischer Winkel αel zwischen zwei Polen Der zurückgelegte elektrische Winkel zwischen zwei Polen entspricht: α el = p ⋅ α r Oder anders ausgedrückt: Verstreicht eine Periode im Drehstromsystem (αel = 360°), so hat der Läufer den Winkel αr zurückgelegt. Nutenzahl je Pol und Phase q Die Wicklung eines Strangs ist selten nur auf eine einzige Spule konzentriert (konzentrierte Wicklung), sondern auf mehrere Nuten verteilt (verteilte Wicklung): q= mit: N 2p ⋅ m N: Anzahl der Nuten p: Polpaarzahl m: Anzahl der Phasen (drei im Drehstromsystem) q: Nutenzahl je Pol und Phase MACEL ASYNCHRONMASCHINE 4 Ermittlung des Ständerdrehfeldes für einen zweipoligen Ständer Zeitlicher Verlauf der drei Strangströme: Schnitt des Ständeraufbaus: Abwicklung der Drehstromwicklung für die Zeitpunkte I und II (Nutenplan): MACEL ASYNCHRONMASCHINE 5 Ermittlung des linksdrehenden Ständerdrehfeldes für einen vierpoligen Ständer Zeitlicher Verlauf der drei Strangströme (Leiter V und W vertauscht): Schnitt des Ständeraufbaus: Abwicklung der Drehstromwicklung für die Zeitpunkte III und IV (Nutenplan): MACEL ASYNCHRONMASCHINE 6 Ständerfeld einer 3-Nut-Gruppenwicklung (p=1) Zeitlich Verlauf der drei Strangströme: Nutenplan der Drehstromwicklung (fortlaufende 3-Nut-Gruppenwicklung) für die Zeitpunkte I und II: Schnitt des Ständeraufbaus: MACEL ASYNCHRONMASCHINE 7 Aufgaben zu Wicklungen 1) Für den Stator eines zweipoligen Drehstrommotors mit 18 Nuten sollen folgende Größen berechnet werden: a) Die Polteilung τP, wenn der Radius des Stators 5cm beträgt! b) Der räumliche Winkel αr, der der Polteilung τP entspricht! c) Die Anzahl der Nuten q je Pol und Phase! 2) Ein vierpoliger Drehstrom-Asynchronmotor hat je Pol und Phase 2 Nuten. Berechnen Sie: a) Die Anzahl der Nuten! b) Den räumlichen Winkel zwischen zwei Polen! c) Den elektrischen Winkel der zwischen zwei Polen verstreicht! d) die Polteilung τP, wenn der Stator einen Durchmesser von 8,4cm besitzt! 3) Gegeben ist folgender Ständerschnitt. Als Drehstromwicklung soll eine fortlaufende 2-Nut-Gruppenwicklung eingelegt werden. Die Maschine soll vier Pole besitzen. Berechnen Sie: a) Die Polteilung τP ! b) Der räumliche Winkel αr zwischen zwei Polen (entspricht der Polteilung τP)! c) Die Anzahl der Nuten je Pol und Phase! Zeichnen Sie: d) Den Nutenplan! e) Die Stromrichtung für den Zeitpunkt II auf Seite 7 in den nachfolgenden Nutenplan! f) Den Feldverlauf mit Angabe der Pole in den Ständerschnitt! Nutenplan im Maßstab 1:2 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 U1 Ständerschnitt im Maßstab 1:1 MACEL ASYNCHRONMASCHINE 8 2 Wirkungsweise der Drehstrom-Asynchronmaschine 2.1 Wiederholung: Generatorprinzip / Motorprinzip / Induktionsgesetz Generatorprinzip Wird ein Leiter in einem Magnetfeld so bewegt, dass er die Feldlinien schneidet, dann wird in ihm eine Spannung induziert. Die Richtung der Induktionsspannung kann mit der Rechten-Hand-Regel (RHR) ermittelt werden. Motorprinzip Auf einen stromdurchflossenen Leiter wirkt in einem Magnetfeld eine Kraft F. Die Richtung der Kraft hängt ab von der Richtung des Stromes durch den Leiter und von der Richtung des Magnetfeldes. Die Richtung der Kraft kann durch die Linke-Hand-Regel (LHR) ermittelt werden. Induktionsgesetz u ind = N ⋅ dφ( t ) di( t ) = L⋅ dt dt 2.2 Trafohauptgleichung Aufgabe Leiten Sie die Trafohauptgleichung her, wenn der Strom durch die (ideale) Induktivität cosinus-förmigen Verlauf hat! MACEL ASYNCHRONMASCHINE 9 Aufgabe zur Induktionsspannung, Motor- und Generatorprinzip 1) Erläutern Sie das Induktionsgesetz! 2) Induktionsspannung: Gegeben ist der nachfolgende Verlauf des magnetischen Flusses Φ. Zeichnen Sie für jeden Zeitabschnitt die induzierte Spannung uind, wenn die Windungszahl N = 20 beträgt! 3) Generatorprinzip: Zeichnen Sie in folgende Skizzen die Richtung des induzierten Stromes bzw. die Bewegungsrichtung des Leiters ein! 4) Motorprinzip: Ermitteln Sie in den folgenden Skizzen die Kraftrichtung auf den (die) stromdurchflossenen Leiter! MACEL ASYNCHRONMASCHINE 10 Aufgaben zum magnetischen Feld 1. Wie groß ist der magnetische Fluss in einem Transformatorkern aus geschmiedetem Stahl mit der Querschnittsfläche 25 cm2, wenn die magnetische Feldstärke 2000 A/m beträgt (siehe dazu Magnetisierungskennlinie auf dem Beiblatt 8)? 2. Geben Sie den Bereich für die magnetische Feldstärke und die magnetische Flussdichte in der Magnetisierungskennlinie vom geschmiedeten Stahl an, in dem die relative Permeabilität µr konstant ist. Wie nennt man den Bereich, in dem µr nicht konstant ist? 3. In einem geschlossenem Kern aus geschmiedetem Stahl mit dem Querschnitt 30 mm x 40 mm und einer mittleren Feldlinienlänge von 500 mm wird der magnetische Fluss durch eine Spule mit 1600 Windungen erzeugt. Die Spule hat einen Widerstand von 400 Ω und liegt an 110V Gleichspannung. Ermitteln Sie a) die magnetische Flussdichte, b) den magnetischen Fluss, c) die Permeabilitätszahl µ, d) die Induktivität der Spule, wenn die Spulenfläche gleich dem Kernquerschnitt ist. 4. Gegeben ist folgendes Diagramm eines magnetischen Flusses: Zeichnen Sie den Verlauf der induzierten Spannung, wenn die Spule 100 Windungen hat (nach der lenz’schen Regel wirkt die induzierte Spannung der Ursache entgegen). MACEL ASYNCHRONMASCHINE 11 MACEL ASYNCHRONMASCHINE 12 2.3 Drehmomentbildung beim Drehstrom-Asynchronmotor Die Drehmomentbildung soll am Modell eines zweipoligen Käfigläufers untersucht werden. Erläuterung der Vorgänge: Das Drehfeld induziert nach dem Generatorprinzip in der Läuferwicklung eine Induktionsspannung. Beim Schleifringläufer kann diese Induktionsspannung bei offenem Läuferkreis zwischen 2 Läuferklemmen gemessen werden. Sie heißt: Läuferstillstandsspannung U20. Ist der Läufer kurzgeschlossen, so fließt in der Läuferwicklung ein Wechselstrom. Er bewirkt nach dem Motorprinzip eine Kraft auf den Leiter i: Für das Drehmoment Mi eines Leiters i im Abstand a zum Läufermittelpunkt gilt: Mit l⋅a = c gilt für das gesamte Motormoment M ( = Summe aller Teilmomente Mi ): A Mit zunehmender Drehzahl nimmt der Feldlinienschnitt ab. Die Läuferspannung wird nach dem Induktionsgesetz kleiner und der Läuferstrom nimmt ab. Würde der Läufer synchron mit dem Ständerdrehfeld drehen, so wären Läuferspannung und Läuferstrom gleich 0. Im Leerlauf sind jedoch kleine Drehmomente zur Überwindung der Reibung erforderlich (Lager, Lüfter). Daher stabilisiert sich die Läuferdrehzahl etwas unterhalb der synchronen Drehzahl: MACEL ASYNCHRONMASCHINE 13 2.4 Schlupfdrehzahl und Schlupf Definition der Schlupfdrehzahl und des Schlupfs: siehe Buch S. 262 – 264: Die Kraft auf die Läuferleiter 1 und 2 wird nachfolgend für die vier möglichen Betriebsfälle ermittelt: a) Motorbetrieb (untersynchroner Lauf) Maschine b) Synchronbetrieb Maschine MACEL ASYNCHRONMASCHINE 14 c) Generatorbetrieb (übersynchroner Lauf) Maschine d) Bremsbetrieb (Gegenlauf) Der Läufer wird vom Rechtslauf in den Linkslauf umgeschaltet, das Ständermagnetfeld hat Rechtsdrehsinn. Maschine Fazit: MACEL ASYNCHRONMASCHINE 15 Aufgaben zum Schlupf / Schlupfdrehzahl 1) Wie groß sind die Drehfelddrehzahl und die Netzfrequenz, wenn ein vierpoliger DrehstromAsynchronmotor bei einem Schlupf von 2,5% die Bemessungsdrehzahl 487,5 min-1 hat? 2) Ein Drehstrommotor hat nebenstehendes Leistungsschild (Typenschild). a) Wie groß ist der Bemessungsschlupf in %? b) Berechnen Sie die Schlupfdrehzahl! c) Für welche Betriebsspannung sind die Ständerspulen ausgelegt? 3) Ein polumschaltbarer Drehstrommotor mit 2 und 8 Polen hat bei der Netzfrequenz von 50Hz und der niedrigen Bemessungsdrehzahl einen Schlupf von 4%. Die hohe Bemessungsdrehzahl wird auf dem Typenschild mit 2880 min-1 angegeben. a) Berechnen Sie die niedrige Bemessungsdrehzahl! b) Welcher Schlupf stellt sich bei der hohen Drehzahl ein? c) Welcher Betriebsfall herrscht im Umschaltaugenblick von der hohen zur niedrigen Drehzahl? Begründen Sie anhand der Schlupfformel! d) Zeichnen Sie das Drehzahl-Zeitdiagramm n = f (t), das den Umschaltaugenblick enthält. Tragen Sie die niedrige und hohe Drehfelddrehzahl als auch die niedrige und hohe Läuferdrehzahl ein! 4) Kennzeichnen Sie auf der Schlupfgeraden die Betriebszustände „Motorbetrieb“, „Synchroner Betriebspunkt“, „Generatorbetrieb“ und „Gegenstrombremsung“. Zeichnen Sie zu der Schlupfgeraden die passende Drehzahlgerade ein. 5) Lösen Sie die Aufgaben 6, 8 und 9 im Buch Seite 276! MACEL ASYNCHRONMASCHINE 16 3 Betriebsverhalten der Drehstrom-Asynchronmaschine 3.1 Läuferfrequenz und Läuferspannung Versuch: Die Drehstrom-Asynchronmaschine M1 (Schleifringläufer) wird mit offenen Läuferklemmen betrieben. Der Läufer wird durch den Motor M2 angetrieben. Die Läuferdrehzahl wird ausgehend von n = 0 bis zur synchronen Drehzahl nd erhöht. Es werden zu verschiedenen Drehzahlen n der zugehörige Schlupf s berechnet und die Läuferfrequenz f2 als auch die Läuferspannung Uq2 gemessen. Schaltungsaufbau: G1 ~ ~ ~ L1 P1 L2 G2 L3 ~ PE 0-220V L+ L- A1 A2 P2 A V 1 Q1 I> 3 I> 5 I> 2 4 6 U V W M 3~ P3 L E1 M ∆/Y 220V/380V p = 2 / 50Hz M1 K E2 PE PE M2 M P5 V n P4 Messwerte: 3.1.1 Läuferfrequenz und Läuferspannung 3.1.2 Läuferfrequenz – und Spannung in Funktion vom Schlupf: Uq2, f2 = f(s) Kennlinien Uq2, f2 = f(s): siehe Buch Seite 264 MACEL ASYNCHRONMASCHINE 17 3.2 Ersatzschaltbild der Drehstrom-Asynchronmaschine Das Ersatzschaltbild (ESB) eines Ständerstranges wird ausgehend vom ESB einer idealen Spule entwickelt. Der Magnetisierungsstrom Iµ (Wechselstrom) baut ein magnetisches Wechselfeld auf. Die Elementarmagnete werden durch das Wechselfeld andauernd umgepolt und rufen im Eisen Ummagnetisierungsverluste (Hystereseverluste) hervor. Das Eisen wird warm. Weiterhin verursacht das magnetische Wechselfeld nach dem Induktionsgesetz im Eisenkern eine Induktionsspannung, die einen Kurzschluss-Strom (Wirbelstrom) durch das Eisen treibt. Die Erwärmung des Eisens, hervorgerufen durch die Wirbelströme, wird als Wirbelstromverlust bezeichnet. Beide Verlustarten können im ESB als ohm'schen Widerstand RFE zusammengefasst werden. Nicht alle magnetischen Feldlinien verlaufen durch den Eisenkern. Ein Teil schließt sich über die Luft. Dieser unerwünschte magnetische Fluss wird als Streufluss bezeichnet; er wird im ESB durch den Streublindwiderstand X1σ gekennzeichnet. Der Leerlaufstrom I0 verursacht im Kupferdraht der Spule Wärmeverluste (Kupferverluste), welche im ESB durch den ohm'schen Widerstand R1 symbolisiert werden. Es ergibt sich für den Ständer folgendes Ersatzschaltbild: Der von der Hauptinduktivität Xh erzeugte magnetische Fluss Φd durchsetzt nicht nur die Ständerspule, sondern auch die Läuferspule und induziert in ihr die Läuferquellenspannung Uq2. Bei kurzgeschlossener Läuferwicklung verursacht der Läuferstrom I2 einen Läuferfluss Φ2. Auch hier schließen sich einige magnetische Feldlinien über den Luftweg (Streufluss). Der Läuferstrom selbst verursacht in den Kupferdrähten bzw. Läuferstäben Wärmeverluste. Beide Verluste werden durch die Widerstände R2 bzw. s · X2σ berücksichtigt. Der Läuferstrom I2 verursacht im Eisenkern die Durchflutung Θ2. Diese Durchflutung wird durch eine gleich große, aber entgegengerichtete Durchflutung Θ1' aufgebracht. Hierzu ist der zusätzliche Ständerstrom I1' notwendig. Es lässt sich das Ersatzschaltbild eines Stranges angeben: mit: U1: Ständerstrangspannung U10: Selbstinduktionsspannung U20: Läuferstillstandsspannung Uq2: Läuferquellenspannung IFE: Eisenverluststrom Iµ: Magnetisierungsstrom I0: Leerlaufstrom I2: Läuferstrom I1': Ständerzusatzstrom I1: Ständerstrom R1, R2: Kupferwiderstände Xσ1, Xσ2: Streublindwiderstände Xh: Hauptinduktivität Bemerkung: Die Drehstrom-Asynchronmaschine kann als Transformator mit kurzgeschlossener Sekundärwicklung aufgefasst werden. MACEL ASYNCHRONMASCHINE 18 Zeigerdiagramm des Ständers im Synchronbetrieb (s = 0) Zeigerdiagramm des Läufers im Motorbetrieb (s ≠ 0) 3.3 Läuferstrom und Läuferleistungsfaktor (siehe Buch Seite 269) Die Formeln für den Läuferstrom I2 und den Läuferleistungsfaktor cosφ2 werden aus dem Ersatzschaltbild oder dem Zeigerbild abgeleitet. 3.3.1 Läuferstrom 3.3.2 Läuferleistungsfaktor MACEL ASYNCHRONMASCHINE 19 3.3.3 Verlauf von Läuferstrom und Läuferleistungsfaktor in Abhängigkeit vom Schlupf Der Verlauf des Läuferstromes als auch des Läuferleistungsfaktors in Funktion des Schlupfs soll am Beispiel eines vierpoligen Drehstrom-Asynchronmotors mit Schleifringläufer (Lucas-Nülle-Motor; 270 W) ermittelt werden. Der Wert der Läuferstillstandsspannung U20 wird im nachfolgenden Versuch ermittelt. Der Wirkwiderstand R2 und der Läufer-Streublindwiderstand X2σ sind bekannt. Schaltung zur Ermittlung von U20 : • Ermittlung von U20: Der Ständer wird bei offenen Läuferklemmen an die Bemessungsspannung angeschlossen. Es wird UKM gemessen: Aus diesem Wert ergibt sich für U20 (Strangspannung): • Aus dem Datenblatt des Herstellers wurde entnommen: Läuferwirkwiderstand (Strangwert): R2 = 5 Ω Läufer-Streublindwiderstand (Strangwert): X2σ = 15 Ω Die ermittelten Werte für U20, R2 und X2σ werden in die Formeln für Läuferstrom und Läuferleistungsfaktor eingesetzt. Es werden zu verschiedenen Schlupfwerten jeweils I2 und cosϕ2 berechnet. Tabelle: mit: U20 = s R2 = 5 Ω ; V ; 1 0,8 15 15,87 0,6 X2σ = 15 Ω 0,4 0,2 0,1 0 12 6 3 0 13 7,81 5,83 5 Uq2 in V s · X2σ in Ω Z2 in Ω I2 in A cosφ2 in v MACEL ASYNCHRONMASCHINE 20 Nun kann der Verlauf des Läuferstroms I2 und des Läuferleistungsfaktors cosϕ2 in Abhängigkeit vom Schlupf s aufgetragen werden. Diagramm: I2 = f (s) ; cosφ2 = f (s) Maßstab: Ms = MI = Mcosφ = 1/cm ; A/cm ; 1/cm Fazit: MACEL ASYNCHRONMASCHINE 21 3.4 Drehmoment in Abhängigkeit vom Schlupf 3.4.1 Herleitung der Drehmomentformel Im Kapitel 2.2 wurde die Abhängigkeit des Drehmoments M von Ständermagnetfeld Φd und vom Läuferstrom I2 erarbeitet: M = c ⋅ Φd ⋅ I2 Zunächst wird noch einmal das Entstehen der Kraft auf die Läuferleiter wiederholt, wenn keine Phasenverschiebung φ2 vorhanden ist, d.h. die induzierte Läuferspannung und der Läuferstrom sind in Phase: φ2 = 0. Es ergibt sich eine resultierende Kraft F wie in nebenstehendem Bild gezeigt. Das Drehmoment Mi eines Leiters ergibt sich aus Kraft mal Hebelarm: Nun ist aber, wie aus Kapitel 3.3 bereits bekannt, der Phasenverschiebungswinkel φ2 nicht gleich null, sondern verändert sich in Funktion vom Schlupf s. Der Läuferstrom eilt der Läuferspannung nach (siehe Zeigerbild: Kapitel 3.2). Sein Nulldurchgang ist gegenüber dem Nulldurchgang der Spannung gegen die Drehrichtung verschoben (siehe Bild). Es ergibt sich eine resultierende Kraft F wie in nebenstehendem Bild gezeigt. Das Drehmoment Mi eines Leiters berechnet sich nach wie vor aus Kraft mal Hebelarm: Mit gilt: Mit F = B d ⋅ I 2 ⋅ l und B d = Der Ausdruck Φd gilt für Mi: A l⋅r wird als Motorkonstante c bezeichnet. Es ergibt sich für das gesamte Motormoment M: A mit: [c] = Nm/VAs [I2] = A [Φd] = Vs [cos φ2] = 1 [M] = Nm MACEL ASYNCHRONMASCHINE 22 3.4.2 Verlauf des Motordrehmoments in Abhängigkeit vom Schlupf (Hochlaufkennlinie) Der Verlauf des Motordrehmoments in Funktion vom Schlupf soll für einen vierpoligen DrehstromAsynchronmotor mit Schleifringläufer (Lucas-Nülle-Motor; 270 W, 1340 min-1) ermittelt werden. Der Läuferstrom I2 und der Läuferleistungsfaktor cosφ2 wurden bereits im Kapitel 3.3.3 für verschiedene Schlupfwerte berechnet. Nach der Trafohauptgleichung ist bei konstanter Ständerspannung U1 und konstanter Netzfrequenz f1 der Ständerfluss Φd konstant. Somit ist c · Φd konstant und wird vorgegeben: c · Φd = 1,969 Nm/A Tabelle: s 1 0,8 0,6 0,4 0,2 0,1 0 I2 in A cosφ2 M in Nm Nun kann der Verlauf des Motormoments M in Abhängigkeit vom Schlupf s aufgetragen werden. Diagramm: M = f (s) Maßstab: Ms = MM = 1/cm ; Nm / cm mit: MK: Kippmoment MA: Anlaufmoment MN: Bemessungsmoment sK: Kippschlupf sN: Bemessungsschlupf sN = sN% = Fazit: Hinweis: Die gezeichnete Kennlinie ist typisch für einen Schleifringläufer. Die Kennlinie eines Käfigläufers weicht geringfügig von dieser ab. Sie hat einen Sattelmoment nahe dem Anlaufmoment. MACEL ASYNCHRONMASCHINE 23 3.4.3 Zusammenhang zwischen Kippmoment und Kippschlupf (Kippdrehzahl) Die Drehmomentkennlinie (Hochlaufkennlinie) hat ihr Kippmoment (Maximum) beim Kippschlupf. Die Steigung im Kipppunkt ist also null. Leitet man die Drehmomentformel nach dem Schlupf s ab und setzt die Ableitung (dérivée) gleich null (Steigung = 0), so erhält man einen Zusammenhang zwischen sK, R2 und X2σ. 3.4.4 Verlauf des Ständerstromes (siehe zuerst Buch Seite 273) Aus dem Ersatzschaltbild der ASM gilt (Kapitel 3.2) für den Ständerstrom I1: I1’ wird über die transformatorische Rückwirkung durch I2 erzeugt. Wegen dem Durchflutungssatz gilt: Der auf die Ständerseite rückwirkende Strom I1’ ist proportional zum Läuferstrom I2; sie haben die gleichen Verläufe. Aus dem Zeigerdiagramm (Kapitel 3.2) ist ersichtlich, dass I2 (also I1’) und I0 nicht die gleiche Phasenlage haben. Sie müssen deshalb, wie oben erwähnt, geometrisch zu I1 addiert werden. Zeigerbilder der Ströme: Aufgabe: Verlauf von I2, I1’, I0 und I1 in Funktion vom Schlupf s Zeichnen Sie I2, I1’, I0 und I1 = f (s) für den bekannten Schleifringläufer (LN 270W) mit Hilfe eines Tabellenkalkulationsprogramms (Excel). Der Leerlaufstrom beträgt I0 = 0,78A. Achten Sie auf die Phasenlage von I2 zu U10! 4 Kennlinien des Drehstrom-Asynchronmotors 4.1 Belastungskennlinien (siehe Laborversuche ASM-1,2 und Buch Seite 282, Bild 4.101) 4.2 Hochlaufkennlinien (siehe nachfolgendes Beispiel und Buch Seite 285, Bild 4.105) MACEL ASYNCHRONMASCHINE 24 Beispiel zu Y/∆-Anlauf: Lüfterantrieb In einem großen Industriegebäude wird Kunststoff geschmolzen, welches zu verschiedenen Endprodukten weiterverarbeitet wird. Zur Belüftung der Halle werden insgesamt sechs große Ventilatoren eingesetzt. Die Ventilatoren sollen anhand von Drehstrom-Asynchronmotoren angetrieben werden (Y/∆-Anlauf). Auf dem Typenschild der Motoren befinden sich folgende Daten: ∆ 400V / 2780 min-1 / 1kW Der Zusammenhang des Drehmomentes und der Lüfterdrehzahl wird durch folgende Formel beschrieben: M L = 2,48 ⋅ 10 −7 Nm min − 2 ⋅n2 mit: n in min-1 Die Motoren laufen mit den Ventilatoren als Last hoch. Die Hochlaufkennlinien des Motors in Stern- und in DreieckSchaltung werden in einem Versuch ermittelt und auf Millimeterpapier anhand eines XY-Schreibers festgehalten. Es gelten folgende Maßstäbe für Drehzahl und Drehmoment beim Steuergerät der Magnetpulverbremse und beim Linienschreiber: Steuergerät: Drehzahl: XY-Linienschreiber: V 1 1000 min Drehmoment: 0,2 −1 V Nm Drehzahl: 0,2 V cm Drehmoment: 0,1 V cm Die Kennlinien sind auf der nachfolgenden Seite dargestellt. Arbeitsauftrag: 1) Ermitteln Sie aus den Maßstäben des Steuergerätes und des XY-Linienschreibers die Maßstäbe mn in mM in min −1 und cm Nm der Hochlaufkennlinien im Millimeterpapier. cm 2) Beschriften Sie die Achsen des Diagramms, fügen Sie die Graduierung für M und n ein und kennzeichnen Sie Y- und ∆-Betrieb! 3) Beschriften Sie die X-Achse zusätzlich als Schlupf-Achse! 4) Zeichnen Sie Anlauf-, Kipp- und Nennpunkte für den ∆-Betrieb ein und ermitteln Sie aus dem Diagramm die dazugehörigen Werte für Drehmoment und Drehzahl! 5) Zeichnen Sie den Verlauf des Lastmoments (Lüftermoment) in das Diagramm ein. Stellen Sie hierzu eine Tabelle auf! 6) Bei welcher Drehzahl stabilisiert sich der Abtrieb im Y- bzw. im ∆-Betrieb? Wie groß ist dann das jeweilige Motormoment? 7) Läuft der Antrieb im Stern-Dreieck-Anlassverfahren überhaupt hoch? Begründen Sie und zeichnen Sie die Hochlaufkennlinie bei Y-/∆-Anlauf ein! 8) Gibt es einen Zusammenhang zwischen der Hochlaufkennlinie und der Belastungskennlinie n = f (M)? Erklären Sie! MACEL ASYNCHRONMASCHINE 25 MACEL ASYNCHRONMASCHINE 26 5 Anlassen von Drehstrom-Asynchronmotoren 5.1 Zweck des Anlassens (siehe Buch Seite 284 und 285 mit Anlaufschwere) Der Anlaufstrom IA ist viel größer als der Bemessungsstrom IN. Er beträgt das 4- bis 8-fache des Bemessungsstroms. Das Anlassverfahren vermindert die Anlaufstromspitze und verändert das Anlaufmoment. Im Folgenden wird das Y/∆Anlassverfahren näher untersucht. 5.2 Y/∆-Anlassverfahren Im Kapitel 3.4.1 wurde die Drehmomentformel hergeleitet. Vernachlässigt man die inneren Widerstände R1 und X1σ, so kann man schreiben: U1 ≈ U10. Da U20 ~ U10 ist, gilt also: I2 ~ Uq2 ~U20. Nach der Trafohauptgleichung ist der Ständerfluss auch proportional zu der Ständerspannung. Somit hat das Drehmoments M eine quadratische Abhängigkeit von der Ständerspannung U1: M ~ U 12. Beim Y/∆-Anlassverfahren wird die Ständerspannung herabgesetzt; ihren Einfluss auf den Ständerstrom und auf das Drehmoment wird nun für die Y- und die ∆-Schaltung betrachtet: Y-Schaltung ∆-Schaltung Beide Impedanzen sind gleich groß: 5.3 Weitere Anlassverfahren (siehe Buch Seite 285 ff.) MACEL ASYNCHRONMASCHINE 27 Aufgabe zur Hochlaufkennlinie Die Hochlaufkennlinie M = f (s) eines 1kW – Schleifringläufers soll in Excel dargestellt werden. Aus Messungen ist bekannt: U20 = 73,6V ; R2 = 0,65 Ω ; X2σ = 2,8 Ω ; c · Φd = 1,05 Nm/A ; Pmech = 1kW ; nN = 1420 min-1 • Berechnen Sie I2, cosϕ2 und M und stellen Sie M = f (s) in Excel dar. • Berechnen Sie anhand der Daten auf dem Typenschild das Bemessungsmoment und vergleichen Sie mit dem im Diagramm ermittelten Wert! Aufgaben zur Stern-Dreieck-Anlass-Schaltung 1) Ein Schleifringläufermotor mit den Nenndaten 7,5 kW, 965 min-1, Y 690V / 50 Hz, η% = 84% und cosφ = 0,85 wird an das 400V / 50Hz - Drehstromnetz angeschlossen. a) Für welche Spannung sind die Wicklungen ausgelegt? Begründen Sie anhand einer Rechnung! b) In welcher Schaltung kann der Motor an das Drehstromnetz angeschlossen werden? Begründen Sie! c) Berechnen Sie die aufgenommene Scheinleistung! d) Wie groß ist der Nennstrom? 2) Ein Drehstrommotor (∆ 400V) nimmt einen Nennstrom von 4,5A auf. Der Leistungsfaktor beträgt 0,83 und der Wirkungsgrad beträgt 0,86. a) Wie groß sind die aufgenommene und die abgegebene (Wirk-) Leistung? b) Wie groß sind induktive Blindleistung und Scheinleistung? c) Berechnen Sie den Anlaufstrom, wenn gilt: IA = 5 · IN! d) Berechnen Sie den Anlaufstrom, wenn der Motor in Y angelassen wird! 3) Ein Drehstrom-Asynchronmotor hat die Daten aus nachfolgendem Typenschild und die nachfolgende Hochlaufkennlinie. Er treibt eine Pumpe an und wird über einen Y-∆-Schalter angeschlossen. Die Umschaltung in ∆ erfolgt, wenn die Enddrehzahl in Y-Schaltung erreicht ist. Die Pumpe benötigt ein konstantes Drehmoment von 24Nm. a) Überprüfen Sie, ob der Motor hinsichtlich seines Drehmomentes für den Antrieb geeignet ist! b) Wie groß ist die Enddrehzahl in Y-Schaltung? c) Bestimmen Sie den Strom unmittelbar nach dem Umschalten in ∆! d) Welche Betriebsdrehzahl hat der Motor bei ∆-Schaltung? Die Nennspannung wird jetzt um 10% verringert. e) Welchen Wert hat nun das Anzugsmoment in Y-Schaltung? f) Welche Konsequenzen hat dies für den Hochlauf des Antriebs? MACEL ASYNCHRONMASCHINE 28 Typenschild: Hochlaufkennlinie: 180 Nm 160 A M 140 M I 120 100 80 I 60 40 20 0 0 100 200 300 400 500 600 700 800 900 1000 1100 1200 1300 1400-1 1500 min n MACEL ASYNCHRONMASCHINE 29 6 Drehzahlsteuerung von Drehstrom-Asynchronmotoren 6.1 Übersicht (siehe Buch Seite 295 ff.) Ausgehend von den bekannten Formeln der synchronen Drehfeld-Drehzahl n d = f n und des Schlupfs s = 1 − ergibt p nd sich folgende Abhängigkeit der Drehzahl n: Die Drehzahl n kann also durch Verändern von f, p oder s gesteuert werden. Eine Übersicht zeigt Tabelle 4.122 Seite 295. 6.2 Drehzahlsteuerung durch Verändern der Schlupfwiderstände Das Drehmoment M ist abhängig vom Läuferwirkwiderstand R2: M = c ⋅ φ d ⋅ I 2 ⋅ cos ϕ 2 = c ⋅ φd ⋅ M = c ⋅ φd ⋅ s ⋅ U 20 R 22 + (s ⋅ x 2σ ) 2 ⋅ R2 R 22 + (s ⋅ x 2σ ) 2 s ⋅ U 20 ⋅ R 2 I2 = s ⋅ U 20 R 22 + (s ⋅ x 2σ ) 2 cos ϕ 2 = R 22 + (s ⋅ x 2σ ) 2 R2 R 22 + (s ⋅ x 2σ ) 2 Gesucht: s = f (R2) bei konstanter Belastung M = ML = konst.: MACEL ASYNCHRONMASCHINE 30 Aus der Hochlaufkennlinie (Bild 4.125 Seite 298) ist zu entnehmen: Durch Verändern des Schlupwiderstands R2 (bzw. R2V) ergibt sich beim Schnittpunkt mit der Lastkennlinie (M = ML) eine neue Drehzahl. Wie verändert sich der Ständerstrom I1, wenn bei konstanter Last der Schlupfwiderstand R2 verändert wird? Bei großer Belastung ist der Leerlaufstrom I0 zu vernachlässigen. Es gilt: I 1 ≈ I 1’ I 1’ ~ I 2 I1 ~ I2 Ist die Abhängigkeit von I2 vom Schlupf s bekannt, so kennen wir auch die Schlupf-Abhängigkeit von I1. Gesucht: I2 = f (R2) bei konstanter Belastung M = ML = konst.: (mit dem Wissen von vorher: s ~ R2) Fazit: Elektronischer Schlupfwiderstand: Pulssteuerung mit einem Gleichstromsteller (siehe Buch Seite 298 und 299) MACEL ASYNCHRONMASCHINE 31 6.3 Drehzahlsteuerung durch Verändern der Polpaarzahl Der Zusammenhang zwischen Läuferdrehzahl n und Polpaarzahl p zeigt folgende Formel. n= f ⋅ (1 − s ) p Es müssen also Käfigläufer-Motoren gebaut werden, bei denen während dem Betrieb eine Polumschaltung der Ständerwicklung durchgeführt werden kann. Man unterscheidet zwei Verfahren: a) Getrennte Wicklungen Zum Einstellen der niedrigen Drehzahl wird die erste Ständerwicklung geschaltet. Um die hohe Drehzahl zu erreichen, wird die erste Wicklung ausgeschaltet und die zweite Wicklung eingeschaltet. b) Umschaltbare Wicklung Die bekannteste Schaltung von umschaltbaren Wicklungen ist die Dahlanderwicklung, die jedoch nur eine DrehzahlUmschaltung im Verhältnis 1:2 ermöglicht. Um diese Motoren von konventionellen Käfigläufer-Motoren äußerlich zu unterscheiden haben sie ein besondere Klemmenbezeichnung (1U / 1V / 1W / 2U / 2V / 2W). Die Ständerwicklung ist bei der niedrigen Drehzahl in ∆ geschaltet. Dabei liegen zwei Spulen pro Strang in Reihe. Bei der hohen Drehzahl liegen jeweils in einem Strang zwei Spulen parallel, die gesamte Wicklung ist jedoch in Stern geschaltet. Deshalb bezeichnet man diese Schaltung als YY – Schaltung (Doppel-Stern-Schaltung). Schaltung: ∆-Schaltung (niedrige Drehzahl, hohe Polpaarzahl) YY-Schaltung (hohe Drehzahl, niedrige Polpaarzahl) Besonderheit beim Umschalten von der hohen in die niedrige Drehzahl: Bei beiden Schaltungsarten (getrennte als auch umschaltbare Wicklungen) wird beim Umschalten von der hohen in die niedrige Drehzahl Energie in das Versorgungsnetz eingespeist. Grund: Läuft der Motor in der hohen Drehzahl (z.B. p = 1: nd = 3000 min-1 / n < 3000 min-1), so fällt sofort nach dem Umschalten in die niedrige Drehzahl (z.B. p = 2: nd = 1500 min-1) die Drehzahl der Läufers infolge Trägheit nicht gleich auf n < 1500 min-1. Die Läuferdrehzahl ist also eine Zeit lang höher als die Drehzahl des Ständerfeldes der Motor läuft als Generator und speist Energie ins Netz ein (s < 0). MACEL ASYNCHRONMASCHINE 32 6.4 Drehzahlsteuerung durch Verändern der Ständerspannung Ausgehend von der Drehmomentformel wird der quadratische Zusammenhang zwischen Drehmoment M und angelegter Ständerspannung U1 hergeleitet: M = c ⋅ Φ d ⋅ I 2 ⋅ cos ϕ 2 Werden I2 und cosφ2 durch die bekannten Ausdrücke aus Kapitel 3.3 ersetzt, so gilt: M = c ⋅ Φ d ⋅ U 20 ⋅ s⋅R2 R 2 + (s ⋅ X 2σ ) 2 2 Nach dem Trafopinzip ist U20 ~U10 und nach der Trafohauptgleichung (siehe Kapitel 2.2) ist Φd ~U10. Somit gilt: M = c1 ⋅ U10 2 ⋅ s ⋅ R2 R 2 + (s ⋅ X 2σ ) 2 2 Vereinfacht kann angenommen werden: U10 ≈ U1 (unter Vernachlässigung von UR1 und Uσ1) und man erhält: M = c1 ⋅ U12 ⋅ s ⋅ R2 R 2 + (s ⋅ X 2σ ) 2 2 Das Drehmoment M ist also proportional zum Quadrat der angelegten Ständerspannung U1. M ~ U1 2 (siehe Kapitel 5.2) Im folgenden Bild ist der Einfluss der Ständerspannung auf Drehmoment und Drehzahl erkennbar. Das Drehmoment M fällt bei Verringerung von U1 auf U1 1 = = 0,707 auf die Hälfte ab (Nachteil); gleichzeitig stellt sich eine kleinere U1N 2 Drehzahl n2 ein. In der Praxis kommt nur eine Verringerung der Bemessungsspannung in Betracht, weil ihre Vergrößerung den magnetischen Fluss über den Bemessungsfluss erhöht und den Magnetisierungsstrom stark ansteigen lässt. Der magnetische Kreis gerät in die Sättigung, welches zu einer unzulässigen Erwärmung des Motors führt. Als Stellglieder zur Einstellung der Ständerspannung werden Stelltransformatoren, Anlasssteller (dreiphasige einstellbare Vorwiderstände) und kontaktlose Drehstromsteller (z.B. antiparallel geschaltete Thyristoren, W3-Schaltung) verwendet. 6.5 Drehzahlsteuerung über die Frequenz Den Zusammenhang von Drehzahl n und Frequenz f beschreibt folgende Formel: n= f ⋅ (1 − s ) p Ersetzt man in der Drehmomentformel wieder die Terme von I2 und cosφ2, so erhält man folgende Gleichung: M = c ⋅ Φ d ⋅ U 20 ⋅ MACEL s⋅R2 R 2 + (s ⋅ X 2σ ) 2 2 ASYNCHRONMASCHINE 33 Nach der Trafohauptgleichung (siehe Kapitel 2.2) ist Φ d ~ M~ U1 . Bei konstanter Netzspannung U1 gilt: f U1 f Wird die Frequenz f verändert, ohne die Ständerspannung U1 zu verändern, so ändert sich zusätzlich zur Drehzahl n (siehe erste Formel) das Drehmoment M: Wird f ↓ dann wird M ↑ und umgekehrt. Um den Einfluss von f auf M zu beseitigen, muss das Verhältnis U1 konstant bleiben. Es gilt somit: f Wird f ↓ und U ↓ damit U1 konstant bleibt, so bleibt auch M konstant. Gleichzeitig wird n ↓. f Wird f ↑ und U ↑ damit U1 konstant bleibt, so bleibt auch M konstant. Gleichzeitig wird n ↑. f Diese Zusammenhänge sind auch grafisch in Bild 4.137 auf Seite 35 dargestellt. Man erkennt, dass bei Verringerung der Frequenz die Hochlaufkennlinien parallel zu kleineren Drehzahlen verschoben werden; das Drehmoment M ändert nicht. In Bild 4.136 ist die Spannungs-Frequenz-Kennlinie (U/f-Kennlinie) dargestellt. Man erkennt, dass bis zu f = 50Hz die Spannung U proportional der Frequenz f verändert wird, um das Verhältnis U1 konstant zu halten ( M = konstant). Aus f den in Kapitel 6.4 genannten Gründen wird die Erhöhung der Ständerspannung über UN vermieden. Den Vorteil eines über den gesamten Drehzahlbereich konstanten Drehmoments wird durch einen Frequenzumrichter ermöglicht (siehe Bild). MACEL ASYNCHRONMASCHINE 34 Spannungs-Frequenz-Kennlinie Frequenzumrichter MACEL und Hochlaufkennlinie ASYNCHRONMASCHINE bei der Drehzahlverstellung mit 35 Aufgaben zur Drehzahlsteuerung von Drehstrom-Asynchronmotoren 1) Ein Schleifringläufer hat folgende Daten auf dem Typenschild: Y 400V ; 1420min-1 ; 1kW ; U20 = 73,6V ; R2 = 0,65Ω a) Berechnen Sie den Bemessungsschlupf! b) Welche Drehzahl stellt sich ein, wenn ausgehend vom Bemessungsbetrieb zusätzlich zum Läuferwiderstand ein Schlupfwiderstand in den Läuferkreis geschaltet wird, der doppelt so groß wie der Läuferwiderstand ist? c) Zeichnen Sie die Schaltung mit ASM, wenn in den Läuferkreis die in Y geschalteten Schlupfwiderstände durch elektronische Leistungsschalter (antiparallele Thyristoren) geschaltet werden! d) Zeichnen Sie die Schaltung, wenn der elektronische Schlupfwiderstand ein Gleichstromsteller ist! 2) Erklären Sie anhand der Drehmomentformel, dass das Verändern des Schlupfs s über den Schlupfwiderstand R2 (bzw. R2V) keinen Einfluss auf die Höhe des Drehmoments hat (U20, Φd, X2σ = konst.). 3) Bei einem Drehstrom-Asynchronmotor (∆ 400V) soll die Drehzahl anhand der Spannung verändert werden. Das Kippmoment der Maschine beträgt 10Nm, das Nennmoment 6Nm und das Lastmoment 5Nm. Um wie viel Prozent darf die Spannung verändert werden, damit das Kippmoment gleich dem Lastmoment wird? 4) Das Typenschild eines DASM enthält folgende Angaben: 11kW ; 23,1A ; ∆ 400V ; 965min-1 ; cosϕ = 0,78 ; MA/MN = 2,7 ; MK/MN = 3 Der Motor soll mit einem Drehstromsteller an der Hälfte der Bemessungsspannung angelassen werden. Das Lastmoment ist über den gesamten Drehzahlbereich konstant und beträgt 100Nm. a) Berechnen Sie das neue Anlaufmoment! b) Wie verhält sich der Antrieb beim Anlauf? 5) Leiten Sie die Transformatoren-Hauptgleichung her, wenn gilt: a) I µ = î µ ⋅ sin(ωt ) b) I µ = î µ ⋅ cos(ωt ) 6) Ein polumschaltbarer Drehstrom-Asynchronmotor (2/8 Pole) mit n1 = 700 min-1 und n2 = 2850 min-1 wird am 50HzNetz von der großen in die kleine Drehzahl umgeschaltet. a) Berechnen Sie den Schlupf im Umschaltaugenblick! b) Zeichnen Sie n = f (t) mit dem Umschaltaugenblick. Kennzeichnen Sie alle nötigen Drehzahlen und die Betriebszustände der Maschine! c) Zeichnen Sie die Hochlaufkennlinien der hohen und der niedrigen Polpaarzahl und kennzeichnen Sie den Umschaltvorgang von der hohen in die niedrige Drehzahl. 7) Zeichnen Sie für die Drehzahleinstellung über: a) Schlupfwiderstände b) Ständerspannung c) Ständerfrequenz d) U/f (Spannungs-Frequenz) jeweils zwei Hochlaufkennlinien und tragen Sie die Umschaltung von einer niedrigen in eine höhere Drehzahl ein! MACEL ASYNCHRONMASCHINE 36 7 Bremsverfahren von Drehstrom-Asynchronmotoren Sinn und Zweck des Bremsens: siehe Buch Seite 308. Die Bremsverfahren können in mechanische und elektrische Verfahren unterteilt werden. Bei den elektrischen unterscheidet man zwischen der Gegenstrombremsung, der Gleichstrombremsung und dem generatorischen Bremsen. 7.1 Mechanisches Bremsen (siehe Buch Seite 308) Aufgabe Erklären Sie die Funktionsweise des Bremsmotors an Hand von zwei Skizzen. 7.2 Gegenstrombremsung (siehe Buch Seite 309) Motorbetrieb (Rechtslauf): Bremsbetrieb (Ständer-Linkslauf): MACEL ASYNCHRONMASCHINE 37 Dynamischer Vorgang beim Bremsen: 7.3 Gleichstrombremsung (siehe Buch Seite 309/310) Schaltung: + MACEL ASYNCHRONMASCHINE – 38 Maschine ist z.B. im ∆ geschaltet: Motorbetrieb (z.B. Linkslauf): Bremsbetrieb: MACEL ASYNCHRONMASCHINE 39 7.4 Generatorisches Bremsen (siehe Buch Seite 310) Motorbetrieb (z.B. Rechtslauf): Generatorbetrieb (Rechtslauf): MACEL ASYNCHRONMASCHINE 40 Dynamischer Vorgang beim Bremsen: Zwei mögliche Fälle: a) f1 = 50Hz (fest) nd1 = 3000min-1 Damit Bremsbetrieb, d.h. Generatorbetrieb (Übersynchroner Lauf) möglich wird, muss gelten: b) f2 < f1 Damit eine Bremsung möglich wird, muss gelten: 8 Fehler an Drehstrom-Asynchronmotoren (siehe Buch Seite 386) Aufgaben 11 bis 15 im Buch Seite 390. MACEL ASYNCHRONMASCHINE 41 9 Der Einphasen-Asynchronmotor 9.1 Drehfelderzeugung bei zweisträngigen Wicklungen Die Hauptwicklung wird mit U1-U2, die Hilfswicklung mit Z1-Z2 bezeichnet: Bedingungen zur Erzeugung des Drehfeldes: • Die Ströme in den beiden Wicklungen müssen zeitlich phasenverschoben sein (Idealfall: 2 gleichgroße, um 90° phasenverschobene Ströme) • Die beiden Wicklungen des Ständers müssen räumlich versetzt angeordnet sein (Idealfall: 90°) Nachfolgend ist das Liniendiagramm zweier um 90° phasenverschobenen der Ströme dargestellt. Die Ströme werden für die Zeitpunkte I und II in den Ständer eingetragen. Aus den Bildern des Ständers erkennt man, dass sich ein rechtsdrehendes Ständerfeld ergibt. Fazit: MACEL ASYNCHRONMASCHINE 42 9.2 Schaltungen zur Erzeugung von Drehfeldern mit EinphasenWechselspannung a) Hilfsstrang ohne Hilfsmittel Schaltung: Zeigerdiagramm: b) Drosselspule im Hilfsstrang Schaltung: Zeigerdiagramm: c) Kondensator im Hilfsstrang Schaltung: Zeigerdiagramm: d) Widerstand im Hilfsstrang Schaltung: Zeigerdiagramm: Fazit: 9.3 Der Kondensatormotor (siehe Buch Seite 316 ff.) MACEL ASYNCHRONMASCHINE 43