Asynchronmaschinen
Werbung

6.
Asynchronmaschinen
Die Wirkungsweise der Asynchronmaschine beruht auf der Entstehung eines Drehfeldes durch
eine mehrsträngige Wicklung. Ihre Erfindung fällt in die Zeit um 1885 durch den Italiener Galileo
Ferraris und den Kroaten Nicola Tesla. Der Russe Michael v. Dolivo-Dobrowolski baute 1889 in
Deutschland den ersten dreiphasigen Asynchronmotor.
Der Asynchronmotor besitzt besonders in der Ausführung mit Käfigläufer gegenüber der
Gleichstrommaschine den Vorteil des wesentlich einfacheren und robusteren konstruktiven
Aufbaus. Er ist damit preisgünstiger und bedarf nur geringer Wartung.
Von Nachteil ist die enge Bindung der Betriebsdrehzahl an die Frequenz der Ständerspannung.
Erst die Entwicklung der Leistungselektronik und im besonderen der Frequenzumrichter haben
Verfahren zur verlustarmen Drehzahlsteuerung der Asynchronmaschinen gebracht.
Kleine Asynchronmotoren unter 1 kW Leistung werden heute in sehr großer Stückzahl als
Einphasenmotoren (230 V) für Haushalt und Gewerbe gebaut. Im Bereich mittlerer Leistung
herrscht der Käfigläufer für 400 V bis 1000 V Drehspannung vor.
Die ausführbare Grenzleistung für Drehstrom-Asynchronmaschinen steigt etwa proportional der
Polzahl und liegt bei Verwendung der normalen Luftkühlung für vierpolige Maschinen bei rd.
30 MW und einer Drehspannung von 10 kV.
6.1 Aufbau und Wirkungsweise
Das Ständergehäuse, das sowohl eine Schweißkonstruktion als auch gegossen sein kann, nimmt
das aktive aus gegeneinander isolierten Dynamoblechen geschichtete Eisenpaket auf. Längs der
Bohrung erhält das Blechpaket Nuten zur Aufnahme der meist dreisträngigen Wicklung.
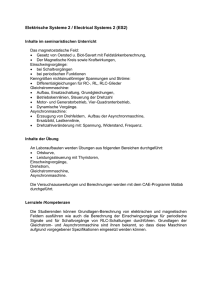
Die Nuten sind bei Maschinen kleiner bis mittlerer Leistung meist halbgeschlossen, so dass die
Drähte der Wicklung einzeln eingeträufelt werden müssen. Bei großen Leistungen und höheren
Spannungen verwendet man offene Nuten und fertig isolierte Formspulen.
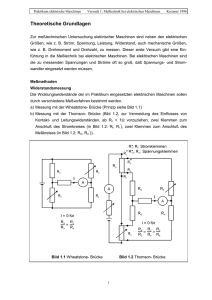
Nutisolation
lackierter Leiter
Verschlußkappe
Ständer
Bronzestab
Nuten einer Asynchronmaschine
mit Träufelwicklung im Ständer
und Käfigläufer
Läufer
Der Läufer trägt ebenfalls ein direkt auf die Welle oder auf eine Tragkonstruktion geschichtetes
Blechpaket mit Nuten zur Aufnahme der Läuferwicklung.
Um die Durchflutung (Amperewindungsbedarf) für die Luftspaltinduktion der Maschine möglichst gering zu halten, wird der Luftspalt zwischen Ständer- und Läufereisen so klein wie konstruktiv möglich gewählt.
Der Luftspalt liegt bis zu mittleren Leistungen bei einigen Zehntel Millimetern. Wärmeausdehnungen im zulässigen Betriebsbereich müssen hierbei berücksichtigt werden.
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
64
In der Bauform als Schleifringläufer enthalten auch die Läufernuten eine Drehstromwicklung,
deren Enden intern verbunden und deren Anfänge über drei Schleifringe und Kohlebürsten zu den
Klemmbrett-Anschlüssen geführt werden. Hier können Widerstände oder Stromrichter angeschlossen werden.
In der Bauform als Käfigläufer ist die Läuferwicklung nicht mehr zugänglich. Die Nuten sind mit
einem Profilstab aus Kupfer, Bronze oder Aluminium ausgefüllt und die Leiter auf beiden Seiten
über Kurzschlussringe verbunden. Bei Verwendung von Aluminium gießt man die
Käfigwicklung komplett in die Läufernuten. Es sind sehr mannigfaltige Nutausführungen mit
Einfach- oder Doppelkäfigen üblich.
Die Drehstromwicklungen der Asynchronmaschine sind prinzipiell wie die Ständerwicklung der
Synchronmaschine aufgebaut (siehe Kap. 5.1).
Wird die Ständerwicklung der Asynchronmaschine an ein Drehspannungssystem gelegt, so
nehmen die drei Stränge Ströme auf, die je eine zeitlich und räumlich phasenverschobene
Durchflutung aufbauen. Resultierend bildet sich eine Drehdurchflutung und bei Berücksichtigung
der räumlichen Grundwelle entsteht ein magnetisches Drehfeld der Synchrondrehzahl:
f
n1 = 1
(6.1)
p
Das Drehfeld induziert in den Leitern der Läuferwicklung eine Spannung, die von der
Läuferdrehzahl abhängig ist. Im Stillstand ist diese Spannung am größten und bei Synchronlauf
(Gleichlauf) mit dem Drehfeld wird diese zu Null. Den relativen Unterschied zwischen Drehfeldund Motordrehzahl bezeichnet man als Schlupf s. Es gilt:
∆n
n − n
s =
(6.2)
= 1
n1
n1
Für die Betriebsdrehzahl der Asynchronmaschine gilt damit:
n = n1 ⋅ (1 − s)
Die Frequenz von Läuferspannung und -strom ist abhängig vom Schlupf. Es gilt:
∆n
f2 =
⋅ f1 = s ⋅ f1
n1
(6.3)
(6.4)
Durch das Drehfeld wird in der Ständerwicklung eine Spannung induziert. [siehe Gl. (5.19)]
U q1 = 4,44 ⋅ f1 ⋅ w1 ⋅ ξ1 ⋅ Φ h
(6.5)
Entsprechend gilt für die in der Läuferwicklung induzierte Spannung:
U q 2 = 4,44 ⋅ f 2 ⋅ w 2 ⋅ ξ2 ⋅ Φ h
(6.6)
Die Größe Φh stellt dabei den mit beiden Wicklungen verketteten Hauptfluss des Grundwellendrehfeldes der Maschine dar. Bezeichnet man die bei s = 1 induzierte sogenannte Läuferstillstandspannung mit Uq20, so gilt bei beliebiger Drehzahl und konstantem Drehfeld:
U q 2 = s ⋅ U q 20
(6.7)
Im Stillstand mit f1 = f2 verhalten sich die induzierten Spannungen in Ständer- und Läuferwicklung wie die wirksamen Windungszahlen.
U q1
w ⋅ξ
(6.8)
= 1 1
U q 20
w 2 ⋅ ξ2
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
65
6.2 Darstellung der Betriebseigenschaften
Wie beim Transformator für die Primär- und Sekundärseite lässt sich bei der Asynchronmaschine
eine Spannungsgleichung der Ständer- und der Läuferwicklung aufstellen. Sie lauten jeweils für
einen Strang:
U1 = R1 ⋅ I1 + j X1σ ⋅ I1 + U q1
(6.9)
0 = R 2 ⋅ I 2 + s ⋅ j X 2σ ⋅ I 2 + U q 2
(6.10)
Beide Wicklungen sind mit dem gemeinsam erregten Drehfeld verkettet, dessen Fluss Φh nach
den Gln. (6.5 und 6.6) die Spannungen Uq1 und Uq2 erzeugt.
Die Streublindwiderstände X1σ und X2σ berücksichtigen die Selbstinduktion durch Streufelder.
Da auf der Läuferseite die Frequenz f2 = s · f1 besteht, ist der für Stillstand berechnete Wert X2σ
mit dem Schlupf s zu multiplizieren.
Um wie beim Transformator eine galvanisch gekoppelte Ersatzschaltung der Wicklungen zu
erhalten, werden die Läufergrößen auf die Ständerwindungszahl umgerechnet.
Mit Uq1 = Uq und den Gln. (6.7 und 6.8) erhält man für den induzierten Läuferwert:
U 'q 2 = s ⋅ U 'q 20 = s ⋅ U q
(6.11)
Die Spannungsgleichungen (6.9 und 6.10) können in nachfolgender Form dargestellt werden.
U1 = R1 ⋅ I1 + j X1σ ⋅ I1 + U q
(6.12)
0 = R '2 ⋅ I '2 + s ⋅ ( j X '2σ ⋅ I '2 + U q )
(6.13)
Aus der Bedingung nach gleichbleibender Durchflutung bei der Umrechnung folgt für den Strom
bei beliebiger Ständer- und Läuferstrangzahl:
m ⋅ w 2 ⋅ ξ2
I '2 = I 2 ⋅ 2
(6.14)
m1 ⋅ w1 ⋅ ξ1
Aus der Forderung nach Konstanz der Kupferverluste und Streublindleistungen
m1 ⋅ R '2 ⋅ I '22 = m 2 ⋅ R 2 ⋅ I 22
(6.15)
folgt:
R '2 = R 2 ⋅
X '2σ
m1 ⋅ ( w1 ⋅ ξ1) 2
(6.16)
m 2 ⋅ ( w 2 ⋅ ξ2) 2
= X 2σ ⋅
m1 ⋅ ( w1 ⋅ ξ1) 2
(6.17)
m 2 ⋅ ( w 2 ⋅ ξ 2) 2
Die durch das Hauptfeld induzierte Spannung Uq in den Gln. (6.12 und 6.13) kann wie beim
Transformator als Spannungsfall des Magnetisierungsstromes an der Hauptreaktanz Xh der
Ständerwicklung nach Gl. (5.16) dargestellt werden.
Iµ = I1 + I '2
(6.18)
Dividiert man die Gleichung für die Läuferseite (6.13) noch durch den Schlupf s, dann erhält man:
U1 = R1 ⋅ I1 + j X1σ ⋅ I1 + j X h ⋅ (I1 + I '2 )
(6.19)
R '2 '
0 =
⋅ I 2 + j X '2σ ⋅ I '2 + j X h ⋅ (I1 + I '2 )
s
(6.20)
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
66
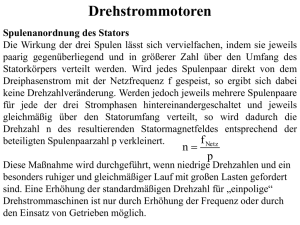
Das Ersatzschaltbild der Asynchronmaschine entspricht den Maschengleichungen (6.19 und
6.20).
X1σ
R1
X'2σ
R'2
I1
I'2
R'2 · 1 -s s
Uq
Xh
U1
Ersatzschaltbild der Asynchronmaschine mit Darstellung der mechanischen Belastung
durch einen Nutzwiderstand
Dieser Ersatzstromkreis der Asynchronmaschine stimmt genau mit dem eines Transformators
überein, der mit dem Nutzwiderstand R'2 · (1 - s)/s abgeschlossen ist. Bei der Asynchronmaschine
stellt er die elektrische Nachbildung der mechanischen Belastung der Welle dar, während in dem
Widerstand R'2 die Stromwärmeverluste der Läuferwicklung umgesetzt werden.
Wie beim Transformator lassen sich auch die EisenverR1· I1
luste in der Ersatzschaltung erfassen. Vernachlässigt
man den Verlustanteil der Streuflüsse, so werden die
jX1σ· I1
Eisenverluste des Hauptfeldes durch den Widerstand
RFe berücksichtigt, der parallel zur Hauptreaktanz Xh
jX2' σ· I2'
liegt.
U1
R'2
'
s · I2
Uq
I1
I2'
ϕ1
Vollständiges Zeigerdiagramm
der Asynchronmaschine
I0
IFe
Iµ
I1
U1
R1
X2' σ
X1σ
Iµ
IFe
Xh Uq
RFe
R2' /s
I2'
I0
Vollständiges Ersatzschaltbild der Asynchronmaschine
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
67
Die Berechnung des Betriebsverhaltens der Asynchronmaschine und insbesondere der Funktion
I1 = f{s} wird wesentlich erleichtert, wenn man die Eisenverlustwiderstand RFe parallel zu den
Eingangsklemmen legt. Es entsteht damit die vereinfachte Ersatzschaltung, die für die Praxis fast
immer genügend genau ist.
R1
X1σ
X'2σ
R'2/s
I1
U1
I'2
RFe
Xh
IFe
Iµ
Vereinfachte Ersatzschaltung der Asynchronmaschine
Die Leistungsbilanz der Asynchronmaschine lässt sich qualitativ wie folgt darstellen:
Von der aufgenommenen Wirkleistung P1 werden bereits im Ständer die Kupferverluste der
Wicklung PCu1 und die Eisenverluste PFe in Wärme umgesetzt. Letztere kann man, da im
normalen Betriebsbereich die Läuferfrequenz nur wenige Hertz beträgt, ganz dem Ständereisen zuordnen.
Auf den Läufer wird die Luftspaltleistung PL übertragen, von der dann die Stromwärmeverluste der Läuferwicklung PCu2 abzuziehen sind.
Von der restlichen Leistung muss noch der Betrag PR zur Deckung der mechanischen Reibungs- und Ventilationsverluste abgezogen werden, um schließlich die an der Welle
verfügbare Leistung P2 zu erhalten.
P1
PFe
PCu1
Ständer
Läufer
Leistungsbilanz der
Asynchronmaschine
PL
PCu2
PR
P2
Sämtliche in der Leistungsbilanz aufgeführten elektrischen Einzelleistungen lassen sich auch über
das Ersatzschaltbild berechnen.
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
68
U12
= m⋅
R Fe
(6.21)
PCu1 = m ⋅ I12 ⋅ R1
(6.22)
PFe
PL = P1 − PFe − PCu1 = m ⋅ I '22 ⋅
R '2
s
(6.23)
PCu 2 = PL ⋅ s = m ⋅ I '22 ⋅ R '2
(6.24)
P2 = PL − PCu 2 − PR = PL ⋅ (1 − s) − PR
(6.25)
Für das Drehmoment gilt die allgemeine Beziehung:
P2
M =
(6.26)
2π ⋅ n
Unter Berücksichtigung der Gln. (6.3 und 6.25) kann das Drehmoment M in das innere
Drehmoment Mi und in den Anteil für die Überwindung der eigenen mechanischen Reibung MR
aufgeteilt werden.
PL
PR
M =
−
= Mi − M R
(6.27)
2π ⋅ n1
2π ⋅ n
Das innere Drehmoment ist unabhängig von der Betriebsdrehzahl und kann stets allein aus der
Luftspaltleistung berechnet werden.
Entsprechend der vereinfachten Ersatzschaltung der Asynchronmaschine gilt für den Ständerstrom I1:
U1
I1 =
+ I Fe
(6.28)
j X h ⋅ (R '2 /s + jX '2σ )
R 1 + jX1σ + '
R 2 /s + jX '2σ + jX h
Entsprechend der Ortskurventheorie folgt die Spitze des Stromzeigers I1 einem Kreis allgemeiner
Lage. Aus den Widerstandswerten der Ersatzschaltung kann der Kreis bestimmt werden.
1.
Bei dem Schlupf s = 0 liegt Synchronlauf vor; mit dem Läuferkreiswiderstand R'2/s = ∞ ist
der Sekundärkreis offen und stromlos. (I1 = I0)
2.
Bei dem Schlupf s = ∞ (ideeller Kurzschluss) wird der wirksame Läuferkreis-Wirkwiderstand R'2/s = 0, so dass keine Läuferverluste auftreten können. (I1 = I∞)
3.
Bei dem Schlupf s = 1 (Stillstand) wird der wirksame Läuferkreis-Wirkwiderstand
R'2/s = R'2. (I1 = Ik)
Verbindet man jeweils die Spitzen zweier Stromzeiger, so schneiden sich deren Mittelsenkrechten
im Kreismittelpunkt. Üblicherweise liegt in der reellen Achse die Spannung U1. Der Zeiger des
Ständerstromes I1 für einen beliebigen Schlupf s ergibt sich vom Koordinaten-Ursprung aus an
den Kreispunkt P(s).
Das Kreisdiagramm wurde um die Jahrhundertwende von Heyland und Osanna entdeckt und trägt
daher auch die Bezeichnung Osanna- oder Heylandkreis.
Für die Einteilung des Kreisumfangs in Schlupfwerte gibt es verschiedene graphische Verfahren.
Meistens wird wie folgt verfahren:
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
69
Die Parallele zur reellen Achse durch P∞ schneidet den Kreis in PB. Anschließend wird die
Schlupfgerade, eine Parallele zu P∞PB konstruiert. Die Gerade P0PB schneidet die Schlupfgerade
bei s = 0 und die Gerade PkPB schneidet die Schlupfgerade bei s = 1.
Die Einteilung der Schlupfgeraden ist linear.
Die Mittelsenkrechte der Strecke P∞P0 schneidet den Kreis im Kipppunkt. Das Drehmoment kann
als Parallele zur reellen Achse zwischen der Geraden P∞P0 und den Kreispunkten P(s) ermittelt
werden.
Als Parallele zur reellen Achse könIm
Re
nen die verschiedenen Leistungen
U1
entsprechend abgegriffen werden, und
P0
zwar zwischen der imaginären Achse
s=0
P(s)
und der Geraden P∞P0 die Ständerverlustleistung PCu1, zwischen der
Geraden P∞P0 und der Geraden P∞Pk
die Läuferverlustleistung PCu2 und
PK
MK
s = sK
zwischen der Geraden P∞Pk und den
Kreispunkten P(s) die abgegebene
Wirkleistung P2.
0
0,2
0,4
0,6
0,8 1,0 s
Kreisdiagramm der
Asynchronmaschine mit
Konstruktion der Schlupfgeraden
Pk s = sk
PB
P∝ s = s∝
Die Daten des Kipppunktes lassen sich unter Vernachlässigung der Hauptinduktivität und des
Ständerwirkwiderstandes mit guter Näherung berechnen.
Mit dieser Näherung gilt für den Läuferstrom I'2:
U1
(6.29)
I1 = − I '2 = '
R 2 /s + j ⋅ (X1σ + X '2σ )
Mit den Gln. (6.24 und 6.29) gilt für die Luftspaltleistung:
PL =
m ⋅ U12
(R '2 /s) 2 + (X1σ + X '2σ ) 2
⋅
R '2
s
(6.30)
Für das innere Drehmoment gilt mit Gl. (6.27):
U12
PL
m
⋅
⋅
Mi =
=
2π ⋅ n1 (X1σ + X '2σ )
2 π ⋅ n1
G. Schenke, 9.2006
1
R '2
s ⋅ (X1σ + X '2σ )
+
Elektrische Netze und Maschinen
s ⋅ (X1σ + X '2σ )
(6.31)
R '2
FB Technik, Abt. E+I
70
Entsprechend dem Kreisdiagramm ist ein maximales Drehmoment, das Kippmoment MiK vorhanden. Es ist verbunden mit dem Höchstwert der Luftspaltleistung, die nach der Ortskurventheorie auftritt, wenn Wirk- und Blindwiderstand gleich groß sind.
Beim Kippschlupf (6.32) tritt das Kippmoment MiK (6.33) auf.
sK = ±
M iK =
R '2
(6.32)
X1σ + X '2σ
U12
m
⋅
4π ⋅ n1 (X1σ + X '2σ )
(6.33)
Allgemein kann das Drehmoment aus Gl. (6.31 bis 6.33) nach der Kloßschen Formel (6.34)
angegeben werden:
Mi
2
(6.34)
=
M iK
(s / s K ) + (s K / s)
Die Auswertung dieser Formel zeigt, dass der Drehmomentverlauf einerseits bei s < sK mit der
Drehzahl linear wie bei der Gleichstrom-Nebenschlussmaschine verläuft und andererseits bei
s > sK mit der Drehzahl nach einer Hyperbel abnimmt.
2
2
1
1
M / MK
Generator
Verlauf des
Drehmo0
mentes nach
der
Kloßschen
-1
Formel
0
Gegenlauf
Motor
-1
-2
2,0
1,5
1,0
0,5
0,0
-0,5
-1,0
-1,5
-2
-2,0
s
Für den Motorbereich der Asynchronmaschine lassen sich dem Kreisdiagramm alle Betriebsgrößen, insbesondere die für Anlauf, Kipppunkt und Leerlauf entnehmen.
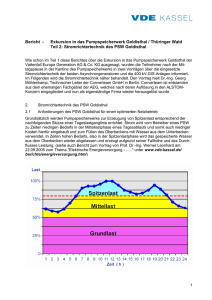
Als Herstellerkennlinien werden die Verläufe von Drehmoment M und Ständerstrom I1 im Drehzahlbereich 0 ≤ n ≤ n1 angegeben, wobei Nennspannung an den Maschinenklemmen vorausgesetzt wird. Häufig ist zusätzlich der Verlauf des Grundschwingungsverschiebungsfaktors cosϕ
(ohne Oberschwingungen ist dieses der Leistungsfaktor λ) mit dargestellt.
Mit der Drehmoment-Drehzahl-Kennlinie (Herstellerkennlinie) wird das Betriebsverhalten der
Asynchronmaschine vollständig beschrieben. Diese Kennlinien lassen sich beim Motor jedoch in
dem wichtigen Betriebsbereich zwischen Kippmoment und Leerlauf schlecht auswerten.
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
71
7
3,0
6
2,5
5
2,0
4
1,5
3
1,0
2
0,5
1
0,0
0
0
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
I / IN
M / MN
3,5
Verlauf von Drehmoment
und Ständerstrom
im Motorbereich
1
n / n0
I / IN
1,0
1,0
0,9
0,9
0,8
0,8
0,7
0,7
0,6
0,6
0,5
0,5
η
cosϕ
n / n0
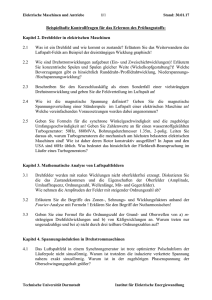
Da das Lastmoment die unabhängige veränderliche Größe ist, werden die Motoreigenschaften
auch gern in Abhängigkeit vom Drehmoment M (0 ≤ M < MK) als Belastungskennlinien aufgetragen. Es sind dieses die lastabhängigen Größen Drehzahl n, Ständerstrom I1, Grundschwingungs-Leistungsfaktor cosϕ, aufgenommene elektrische Wirkleistung P1, abgegebene mechanische
Wirkleistung P2 und der Wirkungsgrad η. Die Belastungskennlinien, auch Betriebskennlinien genannt, werden auch auf ihre Nennwerte bezogen dargestellt.
In diesem Betriebsbereich zeigt
1,6
1,00
sich besonders gut das starre
1,4
Nebenschlussverhalten
der
1,2
0,98
Asynchronmaschine im Verlauf
1,0
der Drehzahl n. Der Ständer0,96
0,8
strom I1 sinkt bei Entlastung
0,6
nicht linear ab, sondern bleibt
0,4
0,94
auch im Leerlauf wegen des
0,2
großen Magnetisierungsstroms
0,92
0,0
verhältnismäßig groß. Auch bei
0
0,2 0,4 0,6 0,8
1
1,2 1,4
Teillast ist der Wirkungsgrad η
M / MN
noch gut.
0
0,2
0,4
0,6
0,8
1
1,2
1,4
M / MN
Betriebskennlinien der Asynchronmaschine
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
72
Nimmt man an einer Asynchronmaschine den Ständerstrom und das Drehmoment vom Leerlauf
bis in den Bremsbetrieb auf, so ergeben sich teils beträchtliche Abweichungen zu dem aus der
Stromortskurve berechneten Verlauf. Dies hat folgende Ursachen:
Das Kreisdiagramm berücksichtigt wie das angegebene Ersatzschaltbild nur die Grundwelle
des Ständerdrehfeldes. Alle Oberwellenerscheinungen, die sich vor allem auf das Drehmoment stark auswirken können, sind zunächst nicht erfasst.
Die Widerstandswerte der Wicklungen gelten für die der Berechnung zugrunde liegende
Betriebstemperatur. Da der ohmsche Widerstand etwa 4 %/10 K ansteigt, können vor allem
zwischen den Anlaufwerten bei kalter oder betriebswarmer Maschine merkliche Unterschiede entstehen.
Beim Kurzschlussläufer ist außerdem ab einer gewissen Stabhöhe der Einfluss der
Stromverdrängung zu berücksichtigen. Er führt zu einer Abhängigkeit von R2 von der
Läuferfrequenz.
Die Blindwiderstände der Ersatzschaltung sind nicht wie angenommen konstant, sondern infolge der Eisensättigung stromabhängig. Dabei ist bei kleinen Schlupfwerten die
Veränderung der Hauptreaktanz und etwa ab dem Kippschlupf die der Streureaktanzen
zu beachten.
6.3 Steuerung von Drehstrom-Asynchronmaschinen
Beim Hochlauf der Asynchronmaschine ändert sich der Strom, ausgehend vom Anlaufstrom Ik,
bis zum Erreichen des Kippmomentes nur wenig. Große Anlaufströme verursachen dann, insbesondere bei langsamem Hochlauf (Schweranlauf), störende Spannungsschwankungen im Netz, so
dass die Energieversorgungsunternehmen nur Motoren bis zu einer bestimmten Grenzleistung
zum direkten Einschalten an das Netz zulassen. Bei größeren Motoren muss man besondere
Anlassverfahren vorsehen.
Gelegentlich entspricht das Anzugsmoment des Dreiphasen-Asynchronmotors auch nicht optimal
den Bedingungen des Antriebs. Beim Dreiphasen-Asynchronmotor mit Schleifringen kann man
dann den Widerstand im Läuferkreis vergrößern, indem man über die Läuferanschlussklemmen
K, L, M einen Anlasswiderstand R2V einschaltet. Hierdurch wird der Anlaufstrom verkleinert und
das Anzugsdrehmoment vergrößert.
Der Läuferanlasser besteht aus drei Widerständen, die durch den verschiebbaren, dreiarmigen
Kontaktbügel in Stern geschaltet sind. Jeder Widerstand setzt sich aus Teilwiderständen zusammen, die an Kontakte angeschlossen sind, so dass der Anlasswiderstand stufenweise aus dem
Läuferkreis herausgenommen werden kann. Der Läuferkreis darf hierbei nicht geöffnet werden.
Eine Betrachtung der Ersatzschaltung der Asynchronmaschine zeigt, dass sich an den Strömen
und somit auch am Drehmoment der Asynchronmaschine nichts ändert, wenn man nach dem Einschalten eines Vorwiderstandes R2V den Schlupf s auf den neuen Wert s* bringt.
Durch den Vorwiderstand R2V werden daher auch die Ortskurven und Kennlinien für Ströme und
Drehmoment nicht beeinflusst. Es wird ihnen lediglich ein anderer Schlupf s* bzw. eine neue
Drehzahl n* zugeordnet. Es gilt daher:
s
R2
=
(6.35)
R 2 + R 2V
s*
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
73
Da die Schaltkontakte des herkömmlichen Läuferanlassers einem hohen Verschleiß ausgesetzt
sind, verwendet man heute vorwiegend zum Anlassen von Dreiphasen-Asynchronmotoren mit
Schleifringen die kontaktlose Pulssteuerung.
L
Id
I2
M
3~
R2P
Dreiphasen-Schleifringläufermotor
mit Pulssteuerung
Die Vorteile des Schleifringläufers wirken sich nur bei großen Motoren und Schweranlauf voll
aus. Für normale Antriebsfälle ist dagegen der Käfigläufer wesentlich billiger und betriebssicherer.
Durch Ausnutzung der Stromverdrängung kann man ähnlich wie beim Schleifringläufer, allerdings sozusagen automatisch über die Läuferfrequenz, die Läuferwiderstände schlupfabhängig
verändern und somit das Anlaufverhalten entscheidend verbessern.
Durch die verschiedenen Nut- und Stabformen von Käfigläufern lässt sich die gewünschte
Anlaufcharakteristik weitgehend einstellen. Der Käfigläufer mit Rundstab aus Kupfer, der
weitestgehend das Betriebsverhalten entsprechend dem Kreisdiagramm hat, wird nur noch gelegentlich bei kleinen Motoren eingesetzt.
Für Leistungen bis rd. 100 kW wird heute bei Normmotoren aus wirtschaftlichen Gründen vorwiegend die Tropfennut mit Aluminiumdruckverguss hergestellt. Bei höheren Leistungen findet
der Hochstabläufer und ab 400 kW gelegentlich der Keilstabläufer Anwendung.
Besonders große Anzugsmomente (Mk > 2 · MN) bei kleinem Anlaufstrom (Ik < 6 · IN) liefert der
Doppelkäfigläufer. In seinen Nuten befinden sich Unter- und Oberstäbe, die einen inneren und
einen äußeren Käfig bilden.
Der Oberstab ist meist ein Rundstab aus Messing; er hat während des Anlaufs, wegen des relativ
großen Streublindwiderstandes des Unterstabes und dessen Wirkwiderstandserhöhung durch
Stromverdrängung, den Läuferstrom fast allein zu führen und erwärmt sich dann infolge seines
großen Wirkwiderstandes.
Nach dem Hochlauf, z.B. bei Nennlast, bestimmt dagegen wegen der geringen Läuferfrequenz der
innere Kupferkäfig den Läuferwiderstand und garantiert gute Nennwerte. Für Leistungen bis
200 kW wird der Doppelkäfig aus Kostengründen auch aus Aluminium hergestellt. Die Motorenhersteller können beim Doppelkäfigläufer die Motoreigenschaften in weiten Grenzen ändern.
Für viele Antriebsfälle reicht die durch Stromverdrängung erzielte Verkleinerung des Anlaufstroms noch nicht aus. Dann muss man durch Herabsetzen der Strangspannungen den wirksamen
Fluss verkleinern.
Wenn der Dreiphasen-Asynchronmotor für eine betriebsmäßige Dreieckschaltung vorgesehen ist,
kann man ihn für den Anlauf in Stern schalten und so jede Strangwicklung mit dem 1 / 3 fachen
der normalen Strangspannung betreiben. Dadurch sinkt der Strangstrom auf 1 / 3 und der
Außenleiterstrom auf ein Drittel des Anlaufstroms in Dreieckschaltung.
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
74
Da das Drehmoment quadratisch von der Strangspannung abhängt, geht das Anzugsmoment
gegenüber der Dreieckschaltung bei der Sternschaltung auf ein Drittel zurück. Die Stern-DreieckUmschaltung kann bei Lüfterantrieben wegen der quadratischen Lastkennlinie und im
Allgemeinen bei lastfreiem Anlauf von Antrieben eingesetzt werden.
Durch Änderung der Polzahl kann die Drehzahl in Stufen verstellt werden. Polumschaltung
kommt nur bei Käfigläufern vor. Man kann für jede Polzahl eine eigene Ständerwicklung
vorsehen und die Wicklungen in den Nuten übereinander anordnen. Je nach Motorgröße und
Polzahl beträgt die bei Drehzahlstufen erzielbare Leistung etwa die Hälfte bis zwei Drittel der
Bauleistung normaler Motoren mit einer Polzahl.
Die Motorleistung kann etwa auf das 0,8fache der normalen Bauleistung erhöht werden, wenn
man für die beiden Polzahlen die gleiche Wicklung ausnutzt. Die bekannteste dieser Einwicklungsschaltungen ist die Dahlanderschaltung. Sie ermöglicht nur Polumschaltungen im
Verhältnis 1 : 2, also z.B. 4 auf 8 Pole.
In der meist ausgeführten Dahlanderschaltung liefert die Dreieckschaltung die kleine und die
Doppelsternschaltung die große Drehzahl. Das Nennmoment bleibt hier etwa gleich.
L1
L2
L3
U
V
W
V
U
W
kleine Drehzahl
große Drehzahl
Dahlanderschaltung
Die Entwicklung der Leistungselektronik hat die Verfahren zur Drehzahleinstellung der Asynchronmaschine stark beeinflusst.
Drehstromsteller
Die Drehzahlsteuerung der Asynchronmaschine durch Absenken der Ständerspannung erfolgt fast
immer mit einer Stromrichterschaltung mit je einem antiparallelen Thyristorpaar oder einem Triac
in den Zuleitungen; diese Schaltung wird Drehstromsteller genannt. Im Allgemeinen ist der
Drehzahlregelung ein Stromregelkreis unterlagert, womit der Steuerwinkel α bei einem neuen
Drehzahlsollwert nur im Rahmen der eingestellten Stromgrenze geändert werden kann.
Durch Anschnittsteuerung jeder Halbschwingung mit dem Zündwinkel α wird die am Verbraucher anliegende Spannung beliebig zwischen dem vollen Wert bei α = αmin und Null bei
α = 180° einstellbar.
Die Kurvenform ist nicht sinusförmig, sondern die Spannung enthält Oberschwingungen.
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
75
L1
L2
L3
D
D Drehstromsteller
S Steuergerät
RI Stromregler
Rn Drehzahlregler
T Tachogenerator
S
α
RI
Iist
M
3~
Rn
T
nist
nsoll
Spannungssteuerung
durch einen
Drehstromsteller
Am einfachen Fall des Wechselstromstellers mit ohmsch-induktiver Belastung kann die
Spannungssteuerung gezeigt werden.
i
uN
α
u
uL
Z
α
uL
uN
ωt
i
Spannungssteuerung durch einen Wechselstromsteller
Dem Einsatz des Stellers zur Drehzahlsteuerung sind durch die dabei auftretenden Läuferverluste
Grenzen gesetzt. Häufig wird der Drehstromsteller nur zum geregelten Anlauf der Asynchronmaschine nach einer Zeitrampe und/oder einer Stromgrenze verwendet.
Für die Stromwärmeverluste PCu2 im Läufer gilt:
PCu 2 = 2π ⋅ (n1 − n) ⋅ M i
G. Schenke, 9.2006
Elektrische Netze und Maschinen
(6.36)
FB Technik, Abt. E+I
76
Umrichterbetrieb der Drehstrom-Asynchronmaschine
Die Drehzahlsteuerung der Asynchronmaschine über eine Drehspannung einstellbarer Frequenz
erlangt in der elektrischen Antriebstechnik wachsende Bedeutung.
Im Vergleich zum klassischen drehzahlgeregelten Antrieb mit der stromrichtergespeisten Gleichstrommaschine, gibt es eine Reihe von Vorteilen wie:
Höhere Grenzdrehzahlen
Kleineres Läuferträgheitsmoment und günstigeres Leistungsgewicht
Keine Stromwenderprobleme, daher
Geringerer Wartungsaufwand.
Im Vergleich zur Technik eines netzgeführten Stromrichters für eine Gleichstrommaschine erfordert der Leistungsteil und die Regelelektronik eines Frequenzumrichters zur Drehzahlsteuerung
der Asynchronmaschine einen hohen Aufwand.
Besonderer Aufwand ist für den Wechselrichter notwendig, der aus den Gleichstromwerten des
Zwischenkreises ein in Frequenz und Effektivwert einstellbares neues Drehspannungssystem
erzeugen muss.
Für die verschiedenen Antriebsaufgaben wurden unterschiedliche Umrichtertechniken entwickelt,
wovon der Puls-Umrichter mit konstanter Zwischenkreis-Spannung (Frequenzumrichter) heute
die größte Bedeutung hat.
Frequenzumrichter (P-Umrichter)
Beim Frequenzumrichter speist im Allgemeinen der netzseitige, ungesteuerte Stromrichter in
Sechspuls-Brückenschaltung (bis 2 kW auch Zweipuls-Brückenschaltung) den Zwischenkreiskondensator C mit nahezu konstanter Gleichspannung 2Ed ein.
Der maschinenseitige Puls-Wechselrichter schaltet Spannungsblöcke variabler Breite (Pulsbreitenmodulation) auf die Maschinenklemmen, so dass sich eine sinusförmige Grundschwingung
der gewünschten Frequenz bildet.
GR
L1
ZK
PWR
ND
SD
L2
ASYM
L3
Drehstrom-Asynchronmaschine mit Frequenzumrichter
In der Grundschaltung ist beim Frequenzumrichter nur Motorbetrieb möglich, wobei durch
Vertauschen der Phasenfolge bei der Ansteuerung der Transistoren eine Drehrichtungsumkehr
entsteht.
Für den Bremsbetrieb wird meistens ein ohmscher Widerstand über einen Widerstandsschalter
(Chopper) im Zwischenkreis vorgesehen. Mit hohem Zusatzaufwand ist auch Energierückspeisung ins Netz bei Bremsbetrieb möglich.
Beim Frequenzumrichter wird durch eine hohe Taktfrequenz der Zwischenkreisspannung ein
nahezu sinusförmiger Maschinenstrom angestrebt. Für niedrige Leistungen (bis rd. 3 kVA)
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
77
werden Feldeffekttransistoren mit Taktfrequenzen bis zu 100 kHz eingesetzt. Im mittleren und
hohen Leistungsbereich (bis 1000 kVA) kommen IGBT mit Taktfrequenzen bis zu 16 kHz zum
Einsatz. Für größte Leistungen finden GTO-Thyristoren und MOS-gesteuerte Thyristoren
Anwendung bei deutlich niedrigen Taktraten (rd. 1 – 2 kHz).
Wegen des weitgehend sinusförmigen Maschinenstromes treten auch bei kleinsten Drehzahlen
(f → 0 Hz) keine Drehmomentenpulsationen auf, wodurch der Antrieb einen sehr großen Drehzahlstellbereich erhält.
+Ud
300,00
u
i
30,00
200,00
20,00
100,00
0
u1G
i1
10,00
t
0,00
0,00
-100,00
-10,00
-200,00
-20,00
-300,00
u1
-Ud
-30,00
u1G Spannungs-Grundschwingung
Strangspannung u1 und -strom i1 eines Kurzschlussläufermotors bei Betrieb mit
Frequenzumrichter
Das System Asynchronmaschine + Frequenzumrichter ist universell einsetzbar und erreicht bei
geeigneten Regelverfahren die Qualität eines Gleichstromantriebes.
6.4 Unsymmetrischer Betrieb der Asynchronmaschine
In einem Dreileiternetz verschwindet zwar die Summe der drei Außenleiterspannungen, diese
sind aber nur selten völlig gleich groß, so dass dann auch die gegenseitigen Phasenverschiebungswinkel von 120° abweichen müssen. Gelegentlich kann eine Zuleitung zum Dreileiternetz unterbrochen sein, z.B. wegen des Ansprechens eines Sicherungselements, und es
können sogar Wicklungsstränge unterbrochen werden.
Daneben sind Einphasen-Asynchronmotoren ganz allgemein als unsymmetrische Anschlüsse von
Drehfeldmaschinen anzusprechen. Zur Berechnung der unsymmetrischen Schaltungen von
Drehfeldmaschinen werden im Allgemeinen die symmetrischen Komponenten mit Mit-, Gegenund Nullsystem verwendet (Kap. 1.4).
Da in einem Dreileitersystem die komplexe Summe der Außenleiter immer Null ist, kann hier
kein Nullsystem auftreten. Das Auftreten eines Gegensystems verursacht eine Reduzierung des
resultierenden Drehmomentes und der mechanischen Leistung, die elektrisch aufgenommene
Leistung ist beim Auftreten eines Gegensystems jedoch größer, so dass auch die Verluste durch
das Gegensystem insgesamt größer werden.
Größere Kupferverluste führen zu einer größeren Wicklungserwärmung. Daher sieht VDE 0530
vor, dass die Netzspannung „praktisch symmetrisch“ sein soll. Ein maximaler Unsymmetriegrad Ug/Um von 5 % ist noch zulässig.
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
78
Es ist zu berücksichtigen, dass bei Nenndrehzahl der Schlupf des Gegensystems rd. 2 beträgt, und
dies führt zu einer überproportionalen Stromerhöhung in der am stärksten belasteten Phase.
Wird beim Dreiphasen-Asynchronmotor eine Zuleitung unterbrochen, das z.B. durch vorzeitigen
Ausfall einer Schmelzsicherung entstehen kann, so geht stets das Drehmoment zurück. Im
Stillstand ist das Anzugsmoment sogar Null. Der Strom und die Verluste werden bei gleichen
Lastverhältnissen zunehmen.
Tritt eine Zuleitungsunterbrechung bei einer im Dreieck geschalteten Ständerwicklung auf, so
kann der Überstromschutz in den Zuleitungen keinen ausreichenden Überlastschutz gewährleisten; die Wicklungen müssen mit Thermoschutzeinrichtungen zusätzlich versehen sein.
Einphasen-Asynchronmotoren
Einphasen-Asynchronmotoren werden heute als Kleinmotoren mit Leistungen bis zu etwa 1 kW
in Großserien gefertigt. Ständerpaket und Läufer des Einphasen-Asynchronmotors haben den
gleichen Aufbau wie der Dreiphasen-Asynchronmotor.
Die Läufer enthalten meist einen Kurzschlusskäfig aus Aluminium, wobei man Stromverdrängungseffekte vermeidet, da sonst die Verluste zu groß werden. Der Einphasenmotor entwickelt mit seiner Arbeitswicklung allein kein Anzugsmoment und liefert wesentlich kleinere Drehmomente als die normalen Zwei- und Dreiphasenmotoren.
Für den Anlauf des Einphasenmotors ist eine räumlich versetzte zweite Ständerwicklung, die
Hilfswicklung, erforderlich, die eine zeitlich phasenverschobene Durchflutung aufbringt, so dass
aus dem Zusammenwirken zweier Wechselfelder ein Drehfeld entsteht. Die erforderliche Phasenverschiebung in der Hilfswicklung wird im Allgemeinen durch Wirkwiderstände oder Kondensatoren erreicht.
Da es den idealen, alle Wünsche erfüllenden Einphasenmotor nicht gibt, ist die Schaltung den Anforderungen des Antriebs anzupassen.
2
CB
1
0
0
0,5
n / n1
3
2
CA
CB
1
1
0
M / MN
3
M / MN
M / MN
3
0
0,5
n / n1
CA
2
1
1
0
0
0,5
n / n1
1
Betriebskondensator CB
Doppelkondensator CA, CB
Anlaufkondensator CA
Drehmomentkennlinien von Motoren mit Kondensatorhilfswicklung
Der reine Einphasenmotor hat kein Anzugsmoment. Der Einphasenmotor mit Betriebskondensator hat insgesamt einen höheren Drehmomenten / Drehzahlverlauf und ein relativ geringes
Anlaufmoment.
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
79
Der Einphasenmotor mit Anlaufkondensator hat ein hohes Anzugsmoment; nach dem Abtrennen
der Hilfsphase vom Netz verhält er sich wie der reine Einphasenmotor und liefert eine entsprechend kleine Nennleistung.
Der Einphasenmotor mit Doppelkondensator hat ein hohes Anlaufmoment und nach dem
Abschalten des Anlaufkondensators hat er das relativ gute Nennmoment des Einphasenmotors mit
Betriebskondensator.
Die Widerstandshilfsphase, die einen gegenüber der Arbeitswicklung wesentlich vergrößerten
Wirkwiderstand aufweist, erfordert einen geringen Aufwand. Sie erzeugt allerdings bei großen
Einschaltströmen ein hohes Anzugsmoment. Auch hier ist nach dem Hochlauf die Hilfswicklung
vom Netz zu trennen, so dass die danach verfügbare Leistung wieder gering ist.
Drehstrommotor am Wechselstromnetz
Man kann auch den Dreiphasen-Asynchronmotor bei recht gutem Betriebsverhalten mit einem
Kondensator an das Einphasennetz anschließen. Aus diesem Grund werden kleine Dreiphasenmotoren meist für die Spannungen 230 V/400 V ausgelegt. Sie können dann in Sternschaltung am
normalen Dreiphasennetz mit 400 V Außenleiterspannung betrieben oder in Dreieck-Steinmetzschaltung an ein Einphasennetz mit 230 V gelegt werden.
Wird beim Anschluss an ein Einphasennetz die dritte Phase mit einer Reihenschaltung aus
Wirkwiderstand und Kondensator erzeugt, so kann für einen Betriebspunkt völlige Symmetrie
hergestellt werden. Häufig wird die Hilfsphase nur mit einem Kondensator erzeugt.
Für kleine Motoren bis zu einer Leistungsabgabe von 1 kW benötigt man bei der Spannung
UE = 230 V und der Frequenz f = 50 Hz etwa 70 µF/kW. Es gilt:
2⋅P
(6.37)
C =
3 ⋅ ω ⋅ U 2E
IV
W
IC
IV W
-IW
IW
IC
C
V
I1
IU
U1
U
UW = UC
UV
60°
UU = U1
V
IU
I1
IW
U
-IV
Symmetrierung des Drehstrommotors am Wechselstromnetz bei ϕ = 60°
mit der Steinmetzschaltung
Die Kondensatorspannung weicht nur gering von der Netzspannung ab; sie steigt bei Leerlauf
etwas an, so daß man meist UC ≈ 1,2 · UE wählt. Die Strangströme sind nur bei Nennlast etwa
gleich groß.
Um ein ausreichendes Überlastungsverhältnis zu bekommen und um zu große Verluste durch
Unsymmetrie zu vermeiden, ist daher die Nennleistung bei Einphasenanschluss um etwa 20 bis
25 % kleiner als bei Dreiphasenanschluss zu wählen.
G. Schenke, 9.2006
Elektrische Netze und Maschinen
FB Technik, Abt. E+I
80