Stromrichtergespeiste Drehstromantriebe mit
Werbung

5.
Stromrichtergespeiste Drehstromantriebe mit Asynchronmaschinen
Über Stromrichterstellglieder gesteuerte und geregelte asynchrone Drehstromantriebe werden im
zunehmenden Umfang eingesetzt. Die Stellgrößen für den Ständerkreis sind Spannung und
Frequenz. Bei Schleifringläufermaschinen kann beispielsweise zusätzlich der Läuferzusatzwiderstand als Stellgröße genutzt werden.
Die Auswahl der Antriebsvariante richtet sich im Wesentlichen nach dem Aufwand für das
Stellglied, dem Stell- und Leistungsbereich und der Betriebsweise in den vier Quadranten des
Kennlinienfeldes. Durch eine Regelung kann in vielen Betriebsfällen ein dynamisches Verhalten
erzielt werden, das dem eines Antriebs mit einer Gleichstrom-Nebenschlussmaschine nahe
kommt.
5.1 Dynamisches Verhalten
Bei schnellen Änderungen der Spannung U1, der Frequenz f1 oder des Widerstandsdrehmoments
MW treten Übergangsvorgänge auf, für die im Allgemeinen die elektromagnetischen Ausgleichsvorgänge mit zu berücksichtigen sind. Die Zusammenhänge lassen sich hierbei durch Einführung
der Betrachtungsweise mit Raumzeigern anschaulich darstellen.
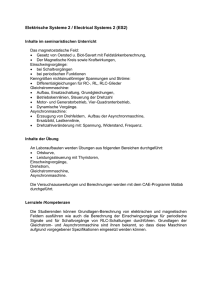
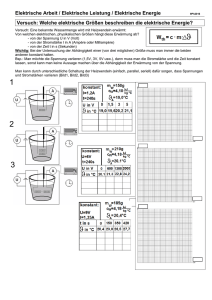
Bei der Rechnung mit Raumzeigern wird von einer Drehstromwicklung ausgegangen, die in den
drei Strängen mit den Strömen ia, ib und ic (ia + ib + ic = 0) eingespeist wird.
Es bildet sich eine Gesamtdurchflutung 1; sie ist das 3/2fache der Durchflutung eines Stranges.
Für den Zeitpunkt t1 ist diese Überlagerung dargestellt. Die Durchflutungen sind durch die ihnen
zugeordneten Ströme ausgedrückt. Der Zeiger ires entspricht damit 1.
a
î
ires = 3/2·î
ia
ib
ic
i
ia(t1)
ia(t1)
ib(t1)
0
ic(t1)
t1
ib(t1)
c
b
t
ic(t1)
Momentanwerte der Ströme ia, ib und ic und ihre zeitliche und räumliche Überlagerung
a
i
ic(t1)
Der von ires abgeleitete Raumzeiger ist nur 2/3 so groß.
Die Momentanwerte der Ströme in den drei Strängen
lassen sich von diesem umlaufenden Raumzeiger bestimmen, wenn man die Projektionen des Raumzeigers auf
die 3 Winkelachsen bildet.
|i| = î
ia(t1)
ib(t1)
Raumzeiger und Projektionen
b
G. Schenke, 2.2015
c
Elektrische Antriebe
FB Technik, Abt. E+I
57
Die Raumzeigerdarstellung erhält ihre besondere Bedeutung dadurch, dass ein allgemeines Koordinatensystem k
eingeführt wird, das mit der allgemeinen Winkelgeschwindigkeit d k/dt = k umläuft. Beim Übergang von einem
Ständerkoordinatensystem (S) mit den feststehenden Winkelachsen ( S = 0) in ein allgemeines Koordinatensystem k
müssen die Größen transformiert werden. Der Raumzeiger
1S hat die Lage k = 1 - k zu dem mit k sich bewegenden Koordinatensystem k.
a
S
k
k
k
k
1
i1S
b
k
=0
c
Raumzeiger im S- und k-System
Dabei ist k der Lagewinkel zwischen dem ruhenden Koordinatensystem S des Ständers und dem
System k. Der Raumzeiger S muss deshalb im Koordinatensystem k mit k = S·e-j k bezeichnet
werden. Damit ist die Transformationsbeziehung vom ruhenden Koordinatensystem S in das kSystem bestimmt.
Ein weiteres wichtiges Koordinatensystem ist das des
a
Läufers der Asynchronmaschine mit der elektrischen WinS
kelgeschwindigkeit d /dt = ·p. Der im Ständer auftretende
L
·p
Raumzeiger S tritt im Läuferkoordinatensystem (L) in der
Form L = S·e-j in Erscheinung. Hieraus kann die Transk
formationsbeziehung vom Läuferkoordinatensystem in das
k
k-System hergeleitet werden; sie lautet: k = 1L·e-j 'k- .
2
1
k
k
k = Lagewinkel des Koordinatensystems k zum Ständerkoordinatensystem (S)
i1S
= Lagewinkel des Läuferkoordinatensystems (L) zum
=0
Ständerkoordinatensystem (S)
b
c
k = 0
Lage des Raumzeigers 1S
k=
2-( k- )
Raumzeiger im S-, L- und k-Koordinatensystem
Bezogen auf das Ständerkoordinatensystem ( k = 0) lautet die Ständerspannungsgleichung der
Asynchronmaschine:
d 1S
u 1S = i1S R 1 +
(5.1)
dt
Für die Transformation der Raumzeiger 1S, 1S und ¯ 1S in das k-System gilt:
j k
u1k = u1S e j k
i1k = i1S e j k
(5.2)
1k =
1S e
Für die zeitliche Ableitung der Ständerflussverkettung gilt:
d 1S
d 1k
d
(5.3)
=
+j k
ej k
1k
dt
dt
dt
Die Ständerspannungsgleichung kann mit den Transformationen (Gl. 5.2 und 5.3) im k-Koordinatensystem (Gl. 5.7) angegeben werden.
Bezogen auf das Läuferkoordinatensystem ( k = ·p) lautet die Läuferspannungsgleichung der
Asynchronmaschine:
d 2L
u 2 L = i 2L R 2 +
(5.4)
dt
Für die Transformation der Raumzeiger 2L,
u 2 k = u 2L e j( k )
i 2 k = i 2 L e j(
G. Schenke, 2.2015
2L
k
und ¯ 2L in das k-System gilt:
)
j( k
)
2k =
2L e
Elektrische Antriebe
FB Technik, Abt. E+I
(5.5)
58
Für die zeitliche Ableitung der Läuferflussverkettung gilt:
d
2L
dt
=
d
2k
dt
+j
d k d
dt dt
2k
e j(
k
)
(5.6)
Die Läuferspannungsgleichung kann ebenfalls im k-Koordinatensystem (Gl. 5.8) angegeben
werden.
Die Spannungsgleichungen der Asynchronmaschine im allgemeingültigen k-Koordinatensystem
in Raumzeigerdarstellung nehmen damit die Form an:
d
(5.7)
u1k = i1k R 1 + 1k + j k 1k
dt
d 2k
u 2 k = i 2k R /2 +
(5.8)
+ j ( k - p) 2 k
dt
Für die Flussverkettungen gilt:
i1k L h i1k i2 k
1k = L1
(5.9)
i2 k L h i1k i2k
2k = L 2
Induktivitäten und Kopplungsfaktoren
L1 = Lh + L
Induktivität des Ständers
L2 = Lh + L
Induktivität des Läufers
k1 = Lh/L1
Kopplungsfaktor des Ständers
k2 = Lh/L2
Kopplungsfaktor des Läufers
= 1 - k1·k2
Gesamtstreuziffer
Das Drehmoment m lässt sich damit berechnen:
(5.10)
m = 3 2 p Im { 2 k i2*k } = 3 2 p k 1 Im { 1k i2*k }
Aus den Flussverkettungen (Gl. 5.9) können die Raumzeiger des Ständer- und Läuferstromes
berechnet werden.
- k 2 2k
- k1 1k
(5.11)
i1k = 1k
i2 k = 2 k
L1
L2
i1k
u1k
R1
j k·
~
1k
j(
L´2
L1
d 1k
dt
Lh
k
- ·p)·
~
d 2k
dt
2k
R´2
i2k
u2k
Transiente Ersatzschaltung der Asynchronmaschine im k-Koordinatensystem (ü = 1)
Der Vorteil des allgemeinen Gleichungssystems besteht darin, dass sich durch geeignete Wahl
von k die interessierenden Größen (u, i, m, ) bei dynamischen Vorgängen rationell berechnen
lassen.
Zweckmäßig gewählte Betrachtungssysteme:
das Betrachtungssystem läuft synchron mit dem Drehfeld (stationärer Betrieb);
k=
1
=
0
das
Betrachtungssystem S steht im Raum still (Anlauf);
k
·p
das Betrachtungssystem L rotiert mit dem Läufer (dynamisches Verhalten im
k=
Betrieb mit konstanter Netzspannung und Frequenz bei auftretenden Belastungsänderungen).
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
59
n
n
m
m
MW
0
t
Drehmoment m und Drehzahl n der Asynchronmaschine beim Anlauf (J = JM)
Das Verhalten der Asynchronmaschine im Betrieb mit konstanter Netzspannung und Frequenz
bei auftretenden Belastungsänderungen entspricht dem Störverhalten der Gleichstrom-Nebenschlussmaschine.
Die Übertragungsfunktionen für das Störverhalten enthalten die transiente elektrische Zeitkonstante des Läufers 'L und die elektromechanische Zeitkonstante M.
/
L
1
=
=
J
1
sN
(5.12)
sK
p MN
Wenn der Ständerwiderstand R1 vernachlässigt wird, erhält man für das Störverhalten die Übertragungsfunktionen:
M
1
f s
n(s)
= - 1 N
m W (s)
p MN
m(s)
=
m W (s)
1+ s
M
1 + s /L
1+ s M + s2
1
+ s2
/
L
(5.13)
/
L
M
(5.14)
M
n0
n
nW
n
m
m
MW
0
t
0
Verlauf der Drehzahl n und des Drehmomentes m der Asynchronmaschine
bei Stoßbelastung mit MW, ausgehend vom Leerlauf ( 'L M 6)
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
60
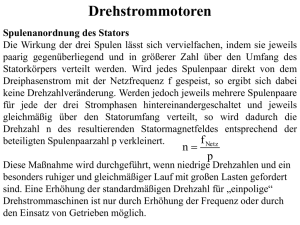
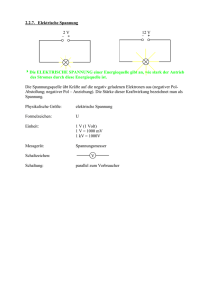
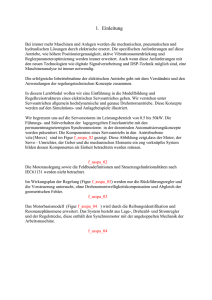
Das Massenträgheitsmoment JM von Asynchronmaschinen mit Kurzschlussläufer steigt
überproportional zur Nennleistung PN. Daraus erklärt sich, dass sich die Anlaufzeiten mit der
Nennleistung vergrößern und die Abführung der Verlustwärme beim Anlauf großer
Maschinen schwieriger wird.
10
JM / kgm2
8 polig
6 polig
1
0,1
0,01
Massenträgheitsmomente JM von 2, 4,
6 und 8poligen Asynchronmaschinen
mit Kurzschlussläufer in
Abhängigkeit der Nennleistung PN
(Orientierungswerte)
2 polig
4 polig
1
10 P / kW
N
100
100
M
/ ms
Die Angaben für die elektromechanische Zeitkonstante M gelten nur dann,
wenn keine weiteren Massenträgheitsmomente zu berücksichtigen sind.
2 polig
10
Elektromechanische Zeitkonstante
M von 2, 4, 6 und 8poligen
Asynchronmaschinen mit
Kurzschlussläufer in Abhängigkeit
der Nennleistung PN
(Orientierungswerte)
4, 6, 8 polig
1
1
10
PN / kW
100
L
´ / ms
100
10
Transiente elektrische Zeitkonstante
L´ von Asynchronmaschinen mit
Kurzschlussläufer in Abhängigkeit
der Nennleistung PN
(Orientierungswerte)
1
1
G. Schenke, 2.2015
10
PN / kW
100
Elektrische Antriebe
FB Technik, Abt. E+I
61
5.2 Antriebe mit Drehstromsteller
Durch die Änderung der Ständerspannung von Asynchronmaschinen lässt sich die Drehzahl
stufenlos verstellen. Für diesen Zweck eignen sich Drehstromsteller, die durch Phasenanschnittsteuerung die Ausgangsspannung steuern.
Bei Ständerspannungssteuerung der Asynchronmaschine gilt:
2
U1
M
2
=
s s K U1 N
M KN
+
sK
s
Nach Umstellung erhält man die Schlupf-Drehmomenten-Kennlinie des Antriebs.
M KN
sK
=
s
M
U1
U1 N
2
M KN
M
2
U1
U 1N
(5.15)
4
(5.16)
-1
Der Stellbereich von Asynchronantrieben mit Drehstromsteller ist ohne Läuferzusatzwiderstände
gering. Die Verluste liegen hoch. Beim Einsatz des Antriebs ist auf den Verlauf des Widerstandsmoments wegen des stark zurückgehenden Kippmoments MK zu achten.
Bei der Steuerung der Asynchronmaschine über Drehstromsteller muss berücksichtigt werden,
dass der Kurzschlussstrom der ASYM das 5- bis 8fache des Motornennstromes beträgt. Um den
Drehstromsteller nicht zu stark überzudimensionieren, wird der Strom durch eine unterlagerte
Stromregelung begrenzt.
Bei der Auswahl der ASYM ist zu beachten, dass durch Oberschwingungen des Stromes etwas
höhere Stromwärmeverluste in der Maschine entstehen und bei niedrigen Drehzahlen können
Pendelmomente auftreten. Der Blindleistungsbedarf des Antriebs erhöht sich um die Steuerblindleistung des Stromrichters.
Drehstromsteller werden häufig zum „sanften“ Anlauf von Drehstrom-Kurzschlussläufern auf
Nenndrehzahl verwendet. Der Anlaufstrom IA wird während der Anlaufphase konstant gehalten
(IA = 2...4·IN). Die Höhe des Anlaufstromes bestimmt die Anlaufzeit des Antriebs, wobei die
Belastung und ihre Drehmomentenkennlinie maßgebend für die Einstellung des Anlaufstromes I A
sind.
D
S
RI
D
S
RI
Rn
T
Drehstromsteller
Steuergerät
Stromregler
Drehzahlregler
Tachogenerator
Iist
M
3~
Spannungssteuerung der
Asynchronmaschine
durch einen Drehstromsteller
Rn
T
nist
nsoll
Wird der Drehstromsteller zum Sanftanlauf einer Asynchronmaschine verwendet, so kann im
Betrieb ein Überbrückungsschütz parallel zum Sanftanlasser geschaltet werden.
Die Drehzahlsteuerung ist im Dauerbetrieb nur bei Arbeitsmaschinen mit stark von der Drehzahl
abhängigem Widerstandsmoment möglich (Pumpen, Lüfter). Vorteile gegenüber der "normalen"
Kurzschlussläufermaschine haben kleine Maschinen mit Widerstandsläufer oder Schleifringläufermaschinen, bei denen Widerstände im Läuferkreis zugeschaltet werden können.
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
62
3
3
U = UN
2
2
M / MN
M / MN
U = UN
U = 0,7·UN
1
U = 0,7·UN
1
U = 0,5·UN
U = 0,5·UN
U = 0,4·UN
U = 0,4·UN
0
0
0,2
0,4
0,6
0,8
1
0
n / nN
0
0,2
0,4
0,6
0,8
1
n / nN
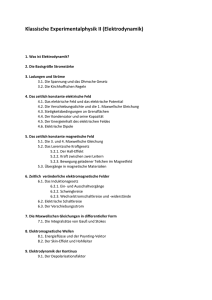
"normaler" Kurzschlussläufer
Widerstandsläufer
Drehmoment-Drehzahl-Kennlinien einer Asynchronmaschine mit
bei Ständerspannungssteuerung
Bei der Ständerspannungssteuerung mit dem Drehstromstromsteller entstehen im Läuferkreis
hohe Stromwärmeverluste, da die Drehzahlverstellung ausschließlich über den Schlupf
(PCu2 = s·PL) erfolgt. Bei einem quadratischen Lastmomentenverlauf MW = MN·(n/nN)2 treten die
maximalen Stromwärmeverluste im Läuferkreis bei n = 2/3·n1 auf. Dieser Lastmomentenverlauf
ist in den Drehmoment-Drehzahl-Kennlinienfeldern mit der Ständerspannung als Parameter
jeweils dargestellt.
5.3 Antriebe mit Pulssteller
Die Drehzahl der Asynchronmaschine mit Schleifringläufer lässt sich durch einen zusätzlichen
Widerstand im Läuferkreis R2V steuern. Es gilt:
R2
s
=
(5.17)
*
s
R 2 + R 2V
Da die Schaltkontakte des herkömmlichen Läuferanlassers einem hohen Verschleiß ausgesetzt
sind, verwendet man heute vorwiegend zum Anlassen von Dreiphasen-Asynchronmaschinen mit
Schleifringen die kontaktlose Pulssteuerung.
Über einen ungesteuerten Gleichrichter in 6-Puls-Brückenschaltung mit Glättungsdrossel L wird
der Widerstand R2P im Läuferkreis wirksam. Dieser Widerstand wird periodisch mit dem elektronischen Schalter kurzgeschlossen. Um Pendelmomente zu vermeiden, muss die Schaltfrequenz
möglichst hoch gewählt werden (1...10 kHz). Die Induktivität der Glättungsdrossel ist umgekehrt
proportional zur Schaltfrequenz. Der im Läuferkreis wirksame zusätzliche Widerstand R2V kann
abhängig vom Einschaltverhältnis TE/T kontinuierlich verändert werden. Der Widerstand R2P
2
T
R
T
1 Id
R 2V =
(5.18)
R 2P 1 - E = 2P 1 - E
3 I2
T
2
T
muss bei der B6-Schaltung doppelt so groß wie der maximale Anlasswiderstand R2V sein.
Die Beanspruchung der Ventile kann durch die Leistungsbilanz des Läuferkreises und des Gleichstromkreises ermittelt werden.
Mi
2
f1
(5.19)
s = U di I d
p
Bei gegebenem Drehmoment M = Mi - MR errechnet sich der Gleichstrom Id mit der
Läuferstillstandsspannung Uq20 (Stranggröße):
2 f1
(5.20)
Id =
Mi
3 6 p U q 20
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
63
L
Id
I2
M
3~
R2P
Für einen drehzahlgeregelten Hochlauf
kann der Drehzahl-Istwert einer Tachomaschine oder der schlupfproportionalen
gleichgerichteten Läuferspannung entnommen werden. Auf Grund des Schalterprinzips des Läuferstellgliedes kann der
Stromregler durch einen einfachen Zweipunktregler realisiert werden.
Drehstrom-Schleifringläufermaschine mit Pulssteller
5.4 Antriebe mit Umrichtern
Für Asynchronmaschinenantriebe können sowohl direkte als auch indirekte Umrichter, d.h.
Zwischenkreisumrichter, eingesetzt werden. Nach folgenden Gesichtspunkten werden Umrichter
ausgewählt:
•
Einzel oder Gruppenantrieb
•
Stellbereich
•
Netzrückspeisung
•
Netzrückwirkungen
•
Dynamik des Antriebs
Bedingt durch geeignete abschaltbare Ventile werden heute vorzugsweise Asynchronmaschinenantriebe mit Spannungszwischenkreisumrichter und Pulswechselrichter eingesetzt; diese werden
im folgenden Frequenzumrichter (P-Umrichter) genannt.
Beim Frequenzumrichter besteht der netzseitige Stromrichter aus einer ungesteuerten Schaltung. Damit entsteht für das Netz keine Steuerblindleistung, eine Netzrückspeisung ist jedoch
ohne Zusatzaufwand nicht möglich. Im Gleichspannungszwischenkreis werden zur Glättung der
nahezu konstanten Spannung Ud Glättungsdrosseln und Kondensatoren eingesetzt. Der
maschinenseitige Pulswechselrichter schaltet die Zwischenkreisspannung nach einem vorgegebenem Pulsmuster auf die Maschine, so dass sich eine nahezu konstante Ständerflussverkettung
einstellt. Bei den Pulsmustern ist das Sinus-PWM-Verfahren (Pulsweiten-Modulation) am
weitesten verbreitet. Ein weiteres Steuerverfahren ist die VVC-Vektorsteuerung (Voltage Vector
Control), das von der Raumzeigerdarstellung ausgeht und in der Mitte der Halbschwingung einen
Spannungsblock einfügt. Die Außenleiterspannung ist auch hier nahezu sinusförmig und bei
Frequenzen über ca. 42 Hz höher als beim Sinus-PWM-Verfahren.
hohe Frequenz
kleine Frequenz
Sinus-PWM-Modulation bei verschiedenen Frequenzen
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
64
1,0
0,866
u-v
v-w
v
u
0,5
w-u
180°
0
60°
w
300°
240°
PWM-Verfahren mit
sinusförmigen
Phasenspannungen
360°
120°
-0,5
-1,0
u-v
1,0
v-w
u
0,5
w-u
v
180°
0
60°
w
240°
300°
120°
-0,5
VVC-Verfahren mit
höherer Ausgangsspannung
360°
und geringeren
Schaltverlusten bei gleicher
Pulsfrequenz
-1,0
Verkettete Spannungen durch vektorielle Addition der einzelnen Phasenspannungen
Ein anderes Pulsverfahren mit voller Spannung im Bemessungspunkt bei 50 Hz und guten
Rundlaufeigenschaften der Maschine ist die Raumzeigermodulation (RZM), die auch als
Spannungszeigermodulation (SZM) oder Vektormodulation (VM) bezeichnet wird. Prinzipiell
wird auch hier eine Pulsmodulation benutzt, um das gewünschte Kreisdrehfeld zu erzeugen.
UY
UY
¯2
U
¯3
U
W
¯ 2 (110)
U
Grenze des
Spannungsbereichs
¯ 2·t2/TP
U
U
¯7
U
¯4
U
¯1
U
¯8
U
V
S1
S2
S3
(111)
¯7
U
+
_
Sektor 1
¯ ist
U
UX
UX
¯ 1(100)
U
¯ 1·t1/TP
¯8 U
U
¯5
U
¯6
U
(000)
Vorgabe der
Bahnkurve
¯usoll
Schaltung
Spannungsraumzeiger
Raumzeiger im Sektor 1
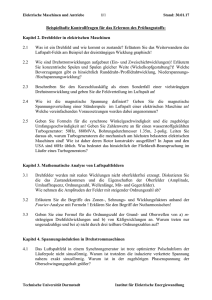
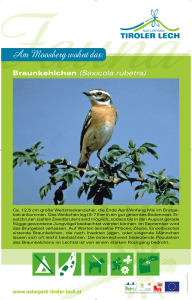
Raumzeigermodulation mit 8 Elementarspannungsraumzeigern
Die 6 Ventile des Wechselrichters können 8 Schaltzustände annehmen; gleiches gilt für die
Ausgangsspannungen, denen sich 8 Elementarspannungsraumzeiger zuordnen lassen. Sie
spannen in Verbindung mit 120° versetzten Spulen ein regelmäßiges 6-Eck ( 1 ... 6) mit 6
Sektoren in der komplexen Ebene auf. Der 7. und 8. Zeiger (Nullzeiger) werden dann gebildet, wenn die Ausgangsklemmen entweder am Pluspol oder am Minuspol der Zwischenkreisspannung Ud liegen, da die Maschinenklemmen dann kurzgeschlossen sind.
Ein kreisrundes Drehfeld erfordert einen mit konstanter Winkelgeschwindigkeit umlaufenden
Spannungsraumzeiger . Bei der Raumzeigermodulation wird der gewünschte Soll-Spannungszeiger soll durch Pulsen der Wechselrichterventile durch den Ist-Zeiger ist möglichst
gut angenähert. Das soll am Beispiel eines Raumzeigers im 1. Sektors mit den beiden Zeigern
1 (Schalterstellung 100, S1 nach +, S2 nach – und S3 nach –) und
2 (Schalterstellung 110)
sowie den Nullzeigern 7 (Schalterstellung 111) und 8 (Schalterstellung 000) näher erläutert
werden.
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
65
Der Sollzeiger soll befindet sich auf der gewünschten Bahn im Sektor I zwischen den Zeigern
Ul und U2. Über geeignetes Pulsen der Zeiger l, 2, 7 und 8 kann jeder Punkt im Sektor 1
- also auch der Sollzeiger - eingestellt werden.
Durch unterschiedliche Einschaltzeiten der einzelnen Zeiger (t 0, t1, t2) in einer Pulsperiode T P,
kann der so gebildete Ist-Spannungsraumzeiger dem Soll-Raumzeiger nachgeführt werden.
Der so erzeugte Ist-Spannungszeiger läuft quasikontinuierlich um und folgt so dem Sollzeiger. Über eine optimale Schaltfolge in einer Pulsperiode wird erreicht, dass jeder
Schaltzustand nur einmal eingeschaltet ist. So werden die Schaltverluste der Ventile minimiert.
Guter Rundlauf ergibt sich, wenn die mittlere Winkelgeschwindigkeit des so erzeugten
resultierenden Flusszeigers konstant ist.
Durch die Raumzeigermodulation lassen sich bei hoher Pulsfrequenz sinusförmige Ströme
mit sehr geringen Oberschwingungen und runde Drehfelder erzielen. Die Verluste sind gering
und Geräusche minimiert.
Das Verfahren eignet sich besonders gut für digitale Steuerungen, da die Schaltsequenz in
Sektor 1 auf die anderen 5 Sektoren - nur mit anderer Indizierung der Schaltbefehle - übertragen werden kann.
Auch wegen der höheren nutzbaren Spannung bei voller Aussteuerung -im Gegensatz zur
einfachen sinusbewerteten Pulsweitenmodulation - arbeiten viele digitale Umrichter heute
nach diesem Verfahren. Es führt auch zu einem guten Rundlauf der Maschine.
Bei modernen Umrichtern wird eine hohe Rechnerleistung für die Regelung benötigt. Dann
muss u. U. die Pulsfrequenz herabgesetzt werden, um den Rechner von der Berechnung der
Pulsmuster zu entlasten.
Durch die Raumzeigermodulation lassen sich in die Ständerwicklung der Drehfeldmaschine
Ströme einprägen, wie sie u. a. bei den feldorientierten Regelverfahren benötigt werden.
Möglichst sinusförmige Wicklungsströme lassen sich auch direkt über das Pulsen der Ströme
nach der Hysterese-Strom-Modulation (HSM) erzeugen. Dabei werden die Maschinenströme von der Steuerung direkt gemessen und einem vorgegebenen Soll-Sinusstrom mit
möglichst geringer Abweichung ( i)in einem Toleranzband nachgeführt.
Der Ist-Wicklungsstrom folgt dem Vorgabestrom um so besser, je kleiner die Abweichungen
i des Hysterese-Strom-Schwellwertschalters sind. Die Wicklung liegt entweder an +Ud, und
der Strom steigt an, oder sie liegt an –Ud, und der Strom fällt ab.
Der Hysterese-Stromregler bestimmt die Pulsung der Spannungen. Die Pulsfrequenz ist
prinzipiell variabel, da sie vom Hystereseband ( i) und von der Art der Last (R, L) bestimmt
wird. Dies führt zu reduzierten Maschinengeräuschen, da sich keine Resonanzen ausbilden
können. Die sehr sinusähnlichen Wicklungsströme führen zu einem guten Kreisdrehfeld.
Für alle Pulsverfahren gilt: Je höher die Pulsfrequenz gewählt wird, um so besser gleicht
sich der Maschinenstrom der Grundschwingung an und die Oberschwingungsverluste in der
Maschine gehen zurück. Gegenläufig dazu steigen bei höheren Pulsfrequenzen die Verluste im
Pulswechselrichter an. Deswegen ist es günstig, nach Frequenz und Stellbereich optimierte
Pulsmuster für den Pulswechselrichter zu verwenden. Dafür eignen sich mikrorechnergesteuerte
Ansteuereinheiten. Im Festwertspeicher des Mikrorechners werden solche Zündmuster eingeschrieben, die je nach Arbeitsbereich mit Veränderung der Pulszahl optimale Bedingungen zur
Verringerung zusätzlicher Verluste und Pendelmomente schaffen.
Feldorientierte Regelung
Die feldorientierte Regelung bietet für die Einhaltung einer konstanten Ständerflussverkettung im
dynamischen Betrieb die günstigsten Bedingungen. Das Grundprinzip der feldorientierten
Regelung beruht darauf, dass die Flussverkettung durch eine Flussregelung konstant gehalten
wird.
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
66
Die für eine Flussregelung erforderliche Flussmessung kann direkt durch Feldsensoren im
Luftspalt der Asynchronmaschine. Weitverbreitet ist die indirekte Methode über die
Ständerströme und Ständerspannungen mit Hilfe eines Flussmodells. Sowohl die
Ständerspannungen als auch die Ständerströme lassen sich aus der Zwischenkreisspannung und
dem Zwischenkreisstrom berechnen. Das Verhalten eines Antriebes aus Asynchronmaschine mit
P-Umrichter und feldorientierter Regelung entspricht dann dem Antrieb einer
Gleichstrommaschine im Ankerspannungs- und Feldstellbereich. Das Regelverfahren erfordert
jedoch eine aufwendige Informationsverarbeitung besonders für die Koordinatentransformationen
der Spannungen und Ströme, die nur mit modernen Mikrorechnerbaugruppen ökonomisch
realisierbar ist.
Das Prinzip der feldorientierten Regelung lässt sich bei der Asynchronmaschine aus der Verknüpfung der Flussverkettungen ¯ 1,2 mit den Strömen 1,2 zum Drehmoment erläutern (Gl. 5.10).
Zweckmäßig hierfür ist die Raumzeigerdarstellung von der Flussverkettung ¯ 2 mit dem Strom 1
im Koordinatensystem mit synchroner Winkelgeschwindigkeit (Feldkoordinatensystem k = 1).
Das Drehmoment ergibt sich zu:
3
3
p k 2 2 i1m
p k 2 Im { 2 i1* } =
(5.21)
2
2
Die Stromkomponente 1m erzeugt mit der Flussverkettung k2·¯ 2 das Drehmoment. Die Stromkomponente beeinflusst die Flussverkettung. Mit diesen beiden Stromkomponenten kann voneinander unabhängig sowohl auf das Drehmoment als auch auf die Flussverkettung eingewirkt
werden. Die verschiedenen feldorientierten Regelschaltungen unterscheiden sich darin, welche
Raumzeiger für die Regelung ausgewählt und mit welchen Methoden sie erfasst bzw. aufbereitet
werden.
m = -
i1
1
i1m
i1
k 2·
i1
2
,ß
Ständerkoordinatensystem
,m
Feldkoordinatensystem
=
·
t
F
1
Winkel zwischen Ständer- und Feldkoordinatensystem
i1
i1 = i1 e-j (
F
i1 = j i1 e-j (
F
+ )
F+
cos(
)
s in(
F
F
+ )
i1 = i1 e-j cos
+ )
i1m = j i1 e-j s in
Raumzeiger des Ständerstroms der Asynchronmaschine
Umrichter mit feldorientierter Regelung
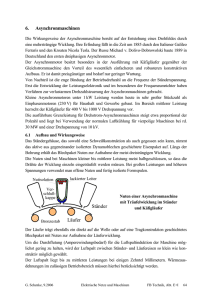
Das Blockschaltbild der umrichtergespeisten Asynchronmaschine enthält zwei Regelkreise für die
Stromkomponenten 1m und . Die Istwerte dieser Stromkomponenten im Feldkoordinatensystem werden über zwei Koordinatenwandler KW1 und KW2 aus den Ständerströmen der Asynchronmaschine gewonnen. Die Stromregler Rim und R mit PI- Verhalten ermitteln die
Steuerspannungen.
Die Steuerspannungen, die am Ausgang der Stromregler im Feldkoordinatensystem vorliegen,
berechnen in den Koordinatenwandlern KW3 und KW4 die Steuerspannungen uSt11, uSt12 und
uSt13 des Pulswechselrichters für die drei Ständerstränge.
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
67
GR
R
s
Rim
¯i1ms
R
F
2max
¯2
¯i1
¯i1m ¯i1
PWR
F
¯i1
F
¯i1
sin
cos
F
F
uSt
2
uSt
KW2
ej
KW4
uSt
e-j
Ri
s
KW3
FM
3
KW1
i11
i12
i13
2
3
u11
u12
u13
T
M
3~
R Drehzahlregler; R Flussregler; Rim, R Stromregler; KW1 - KW4 Koordinatenwandler;
F Flusssollwertgeber; FM Flussmodell; GR Gleichrichter; PWR Pulswechselrichter
Blockschaltbild der umrichtergespeisten Asynchronmaschine mit feldorientierter Regelung
Die Läuferflussverkettung ¯ 2 wird indirekt über das Flussmodell FM aus den drei Ständerspannungen mit den Ständerströmen ermittelt. Der Betrag der Läuferflussverkettung ¯ 2 wird als
Istwert dem Feldregler R zugeführt. Der mit der Ständerfrequenz 1 umlaufende Raumzeiger ¯ 2
steuert entsprechend seiner aktuellen Lage über die Winkelkoordinaten cos F und sin F die
Koordinatenwandler KW2 und KW3. Der Koordinatenwandler KW3 enthält außerdem eine
Rechenschaltung zur Entkopplung der beiden Stromregelkreise. Dazu werden zusätzlich die
Istwerte der Flussverkettung ¯ 2 und der Maschinendrehzahl benötigt.
Der Drehzahlregelkreis mit dem Regler R bestimmt analog zum geregelten Gleichstromantrieb
den Sollwert 1ms der drehmomentsteuernden Stromkomponente. Der Sollwert ¯ 2s für die
Läuferflussverkettung wird durch den Funktionsgeber F abhängig vom Drehzahl-Istwert
gebildet. Er ermöglicht wie beim Gleichstromantrieb eine Feldschwächung im oberen
Drehzahlbereich.
Wegen des relativ großen Umfangs der Informationsverarbeitung bei der feldorientierten
Regelung sowie wegen der hohen Echtzeitanforderungen enthalten Frequenzumrichter leistungsfähige Mikrorechner mit 16-bit-Verarbeitung für die Regeleinrichtungen.
Heutige Frequenzumrichter sind volldigitalisierte ( P-gesteuerte) Umrichter mit nahezu
konstanter Zwischenkreisspannung. Die Bildung der Ausgangsspannung erfolgt meistens noch
nach dem Prinzip der sinusbewerteten Pulsbreitenmodulation. Die Weiterentwicklung der
Umrichtertechnik findet heute verstärkt im Steuerteil bei der Umrichtersoftware für den Betrieb,
bei den Kommunikationsschnittstellen und dem Datentransfer (Bussysteme für die Antriebsvernetzung) statt. Die Software moderner Frequenzumrichter stellt eine 3-Schichten-Struktur
dar.
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
68
Schicht 1: Betriebssystem / Parameter und Kommunikation
Jeder Frequenzumrichter benötigt zum Betrieb eine Grundsoftware für die Steuerung, Regelung,
Überwachung (Schutzkonzept) und Kommunikation. Diese Grundsoftware stellt praktisch das
Betriebssystem des Umrichters dar. Neben den Kommunikations- und Motordaten können
weitere Parameter für den Betrieb des Antriebs eingegeben werden. Einstellbare Parameter sind:
•
Minimalfrequenz, Maximalfrequenz,
•
Eckfrequenz für den Feldschwächbereich,
•
Beschleunigungs-, Bremszeit,
•
Maximalstrom, Dauerstrom,
•
"Boost" zur Erhöhung des Anlaufdrehmomentes,
•
Schlupfkompensation,
•
Wirkung der Gleichstrombremse,
•
ggf. Schnittstellenadressierung, Benutzercode.
Für den Betrieb des Antriebes können verschiedene Funktionen vorgegeben werden:
•
Automatische Wiedereinschaltung,
•
Frequenz- oder Momentenvorgabe,
•
Fangen einer frei drehenden Maschine (während des Suchlaufes beträgt der Maschinenfluss
rd. 5 % vom Nennfluss),
•
mehrere parametrierbare Frequenzsollwerte mit parametrierbaren Brems- und Beschleunigungsrampen zwischen diesen Frequenzsollwerten,
•
parametrierbare Jog-Frequenzen,
•
mehrere ausblendbare Resonanzfrequenzbereiche,
•
lastabhängige U/f-Kennlinie (Lüfter-Charakteristik),
•
Betrieb mit Drehzahlrückführung bei verschiedenen Drehzahlsollwertvorgaben,
•
"dynamischer Boost" (IR-Kompensation lastabhängig) oder "statischer Boost" (IRKompensation lastunabhängig),
•
Verhalten beim Stillsetzen (Austrudeln, Gleichstrombremsung, Bremsrampe abfahren),
•
Auswahl des Frequenzbereiches,
•
Auswahl der Taktfrequenz und Modulationsverfahren (Sinus-PWM, VVC, RZM).
Das Schutzkonzept soll den Umrichter vor Zerstörung schützen. Bei einer Störung
•
wird das Gerät intern gesperrt (Impulssperre Wechselrichterbrücke),
•
erfolgt über das Summenstörrelais eine Fehlermeldung,
•
zeigt das Display der digitalen Bedieneinheit die Abschaltursache an,
•
wird die Abschaltursache netzausfallsicher gespeichert.
Eine Störabschaltung mit Stillsetzvorgang des Antriebes an einer eingestellten Bremsrampe
erfolgt bei:
•
Ausfall einer oder mehrerer Netzphasen,
•
Unterspannung im Gleichspannungszwischenkreis.
Eine sofortige Störabschaltung (Antrieb trudelt aus) erfolgt bei:
•
Überspannung im Zwischenkreis,
•
Kurzschluss oder Erdschluss am Ausgang,
•
Überlast des Antriebes,
•
Umgebungstemperatur zu hoch,
•
Überhitzung des Kühlkörpers,
•
Überhitzung der Maschine (nur mit Kaltleiter),
•
Fehler einer externen Störkette,
•
Drahtbruch oder Fehler bei der Sollwertvorgabe,
•
Fehler des geräteinternen Netzteils,
•
Hardwarefehler im P-Umrichter.
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
69
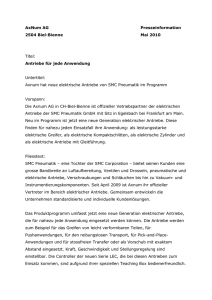
IGBT - Spitzenstrombereich
In / InNenn in %
Überstromgrenze "OI"
215
Stoßlaststrombereich
185
ABSCHALTBEREICH
Maximalstromgrenze
150
Überlaststrom
Dauerstrom
105
0
3·10-6 3·10-5
3·10-3
10
60
tab in s
Überstromschutz eines IGBT-Frequenzumrichters
Schicht 2: Technologiefunktionen
Dieser Softwareteil enthält besondere, bereits vorbereitete Antriebs- und Anlagenlösungen,
die der Anwender modular nutzen kann. Diese sind bei hochwertigen Frequenzumrichtern
verfügbar (manchmal optional):
•
Gleichlaufregelungen oder elektronisches Getriebe,
•
„Elektrische Welle“ als Ersatz für die mechanische Königswelle,
•
Positionierung, Kurvenscheibe und Registerregelung.
Diese modularen Bausteine stehen zur Nutzung allgemein bereit und müssen nur noch
softwaremäßig angewählt und parametrisiert werden. Teilweise sind auch nur Steckplätze
vorgesehen, um Hardwarekomponenten für die Sonderfunktionalitäten nachrüsten zu können.
Tänzer
Aufwickler
vLinie
R-Lauf
+
M
L-Lauf
Durchmessersensor
M
Durchmesser
Tänzerlage
FU
Liniengeschwindigkeit
FU
Anwendung einer Technologiefunktion beim Wickelantrieb mit Tänzerlageregelung
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
70
Schicht 3: Funktionsblock
Diese Schicht - nur bei hochwertigen Frequenzumrichtern und Servo-Frequenzumrichtern
vorhanden - ist dem aufgabenspezifischem Bereich des Anwenders vorbehalten. Der Softwarebereich ist vom Hersteller strukturiert und vorbereitet, aber von ihm nicht belegt. Er
enthält bereits aufrufbare Bausteine für logische Verknüpfungen, Rechenoperationen und
komplexe Funktionen (Funktionsbibliothek) oder eine komplette SPS-Funktionalität. Seine
freiprogrammierbare Anwendersoftware (quasi eine integrierte Kleinsteuerung) stellt
anwender- und anwendungsspezifische Programme zur prozessnahen intelligenten Lösung der
Antriebsaufgabe bereit. Die Funktionalitäten sind in einer der 5 Programmiersprachen nach
IEC/EN 61 131-3 programmierbar. Alle Steuerungsaufgaben werden so in steigendem
Umfang dezentralisiert und in den immer intelligenter werdenden Umrichter verlegt. Diese
Funktionssoftware kann über Schnittstellen (im Rahmen der Antriebsvernetzung) beliebig
erweitert werden. Sie wird einmalig oder für jede Aufgabenvariante der Anlage, z.B. über die
Vernetzungsschnittstelle, neu geladen.
Bibliothek mit Bausteinen der Automatisierungstechnik:
•
Boolesche Operationen wie UND, ODER, NICHT,
•
algebraische Rechenoperationen,
•
Komparatoren, Flipflops, Zähler,
•
PID-Regler usw.
Die 5 Programmiersprachen nach IEC/EN 61131-3:
•
Ablaufsprache (AS),
•
Anweisungsliste (AWL),
•
FunktionsbausteinSprache (FBS),
•
Kontaktplan (KOP),
•
Strukturierter Text (ST).
Quasistationäres Betriebsverhalten der Asynchronmaschine am Frequenzumrichter
Im Folgenden werden Frequenzumrichter mit ungesteuerten netzseitigen Brückenschaltungen
(B2, B6) betrachtet (motorischer Betrieb der Asynchronmaschine). Da der Zwischenkreisstrom
nicht konstant ist, kann Gl. 3.6 zur Berechnung der Zwischenkreisspannung Ud nicht verwendet
werden. Spannungsfälle an der Zwischenkreisinduktivität Ld und den Stromrichtern werden
näherungsweise mit der relativen Gleichspannungsänderung d berücksichtigt. Für die Nennwerte
erhält man die Zwischenkreisspannung:
U dN = 2 U N (1 - d N )
(5.22)
UdN = Gleichspannung des Zwischenkreises bei Nennspannung (UL = UN) und Nennleistung
(P = PN)
dN = relative Gleichspannungsänderung bei Nennleistung ohne Kommutierungsinduktivitäten
Lk
UN = Nennspannung der Asynchronmaschine
Bei beliebiger Netzspannung UL und beliebigem Netzstrom I1 gilt näherungsweise für die
Zwischenkreisspannung:
Ud =
2
UL - UN dN
I1
-2
I1 N
L k I1
(5.23)
Ud = Gleichspannung des Zwischenkreises
UL = Netzspannung
I1
= Netzstrom
I1N = Netzstrom bei Nennleistung der ASYM
Die Gleichungen (5.22 u. 5.23) dürfen nicht für den generatorischen Betrieb der Asynchronmaschine verwendet werden.
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
71
Die bei Umrichterbetrieb auftretenden Zusatzverluste in der Maschine führen zu einer
Reduzierung des Wirkstromes, um die Asynchronmaschine vor thermischer Überlastung im
Dauerbetrieb zu schützen. Für den Wirkstrom IW gilt:
Mi
N
0,9 I WN
mit I WN = I N cos
M iN
IWN =
Nennwirkstrom bei Netzbetrieb
Mi =
inneres Drehmoment
MiN =
inneres Nenndrehmoment
=
Maschinennennfluss
bei Netzbetrieb
N
Häufig kann das Reibdrehmoment MR vernachlässigt werden.
Es gilt dann: Mi = M und MiN = MN.
I W = I WN
(5.24)
N
Näherungen für f2 20 Hz
Bei Maschinenfrequenzen f2 0,4 · fN kann der Ständerwirkwiderstand R1 vernachlässigt werden.
Für den Maschinenfluss gilt dann näherungsweise:
U 21 f N
(5.25)
= N
U N f2
U21 =
Effektivwert der Grundschwingung der Maschinenspannung
fN
=
Netzfrequenz (Nennwert)
Für den Maschinenschlupf s gilt:
Mi U N
s = sN
(5.26)
M iN U 21
sN
=
Nennschlupf der Asynchronmaschine bei Netzbetrieb im Nennbetriebspunkt
Im Stellbereich mit konstantem Fluss
=
N gilt unter Vernachlässigung der
Durchlassspannung der Stromrichterventile für den Effektivwert der Grundschwingung der
Maschinenspannung U21:
f2
(5.27)
fN
Für den Effektivwert der Maschinenspannung U2 gilt bei Sinus-PWM- und VVC- Modulation:
U 21 = U N
U 21 2
8
(5.28)
=
U d U 21
Ud
Im Feldschwächbereich - die Maschinenspannung ist konstant - gilt unter Vernachlässigung der
Durchlassspannung der Stromrichterventile für den Effektivwert der Grundschwingung der
Maschinenspannung U21 bei sinusbewerteter Pulsbreitenmodulation:
U2 = Ud
2
Strangspannungen mit dem VVC-Verfahren:
U 21 =
Strangspannungen mit dem
sinusbewerteten PWM-Verfahren:
U 21 =
Ud
(5.29)
2
Ud
3
(5.30)
2 2
Der Effektivwert der Maschinenspannung U2 wird nach Gl. (5.28) berechnet. Für U2 gilt:
U2 = Ud
2
(nach Gl. 5.29)
G. Schenke, 2.2015
oder
U2 = Ud
3
(5.31)
(nach Gl. 5.30)
Elektrische Antriebe
FB Technik, Abt. E+I
72
Näherungen für 2,5 Hz f2 20 Hz:
Bei Maschinenfrequenzen 0,05 · fN f2 0,4 · fN kann der Ständerwirkwiderstand R1 nicht mehr
vernachlässigt werden - mit dieser Näherung darf selbstverständlich auch bei Maschinenfrequenzen über 20 Hz gerechnet werden -. Im unteren Frequenzbereich muss der Längsspannungsfall an R1 berücksichtigt werden. Für den Maschinenfluss gilt dann näherungsweise:
f N U 21 - 3 I W R1
f 2 U N - 3 I WN R1
R1 = Ständerwirkwiderstand in Sternersatzschaltung
Für konstanten Fluss = N gilt:
=
(5.32)
N
Mi
(5.33)
und
I WN = I N cos N
M iN
Unter Vernachlässigung der Durchlassspannung der Stromrichterventile gilt für den Effektivwert
der Grundschwingung der Maschinenspannung U21:
I W = I N cos
U 21 = U N
N
f2
+ 3 I N cos
fN
N
R1
Mi f2
M iN f N
(5.34)
Der Effektivwert der Maschinenspannung U2 kann dann nach Gl. (5.28) näherungsweise
berechnet werden.
Die Gleichung (5.34) mit Berücksichtigung des Längsspannungsfalls am Widerstand R1 ist
grundsätzlich genauer als Gl. (5.27).
Bei Frequenzen f2 < 2,5 Hz sind die zuvor genannten Näherungen zu ungenau. Es muss hier mit
der genauen Ersatzschaltung gerechnet werden.
Gute Rundlaufeigenschaften der Asynchronmaschine lassen sich bei Frequenzen f2 < 2,5 Hz nur
mit der Raumzeigermodulation (RZM) oder mit der Hysterese-Strom-Modulation (HSM)
erzielen.
5.5 Doppelt gespeiste Asynchronmaschine
Die doppelt gespeiste Asynchronmaschine bezeichnet ein System aus SchleifringläuferAsynchronmaschine mit läuferseitigem Frequenzumrichter zur Regelung der Drehzahl und der
Blindleistung. Der Ständer der Asynchronmaschine ist direkt mit dem Drehspannungsnetz
verbunden. Der Läuferkreis wird heute meist über einen Frequenzumrichter, der einen eingangsund ausgangsseitigen Pulswechselrichter besitzt, mit dem Drehspannungsnetz verbunden. Mit
dem maschinenseitigen Pulswechselrichter werden aus dem Spannungszwischenkreis nach dem
Sinus-PWM-Verfahren pulsartige Spannungen auf den Läuferkreis geschaltet, so dass sinusförmige Ströme variabler Frequenz und Amplitude in den Läuferkreis eingeprägt werden.
L1
L2
L3
ASYM
Ud
Schaltung der doppelt gespeisten Asynchronmaschine mit selbstgeführtem Stromrichter
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
73
Der netzseitige Pulswechselrichter ist ein selbstgeführter, aktiv geregelter Netzwechselrichter
(siehe Kap. 3.3, S. 40). Zur du/dt-Begrenzung werden Sinus-Filter eingesetzt. Somit kann
sowohl Energie aus dem Netz in den Läuferkreis eingespeist als auch aus dem Läuferkreis
Energie ins Netz zurückgespeist werden.
In der Vergangenheit wurde maschinenseitig auch eine ungesteuerte B6-Brückenschaltung
mit Dioden zur Gleichrichtung und netzseitig eine vollgesteuerte B6-Brückenschaltung mit
Thyristoren im Wechselrichterbetrieb eingesetzt. Diese Anordnung wird als untersynchrone
Stromrichterkaskade (USK) bezeichnet. Eine USK kann jedoch nur unterhalb der synchronen
Drehzahl motorisch betrieben werden. Eine USK ist nur für den Antrieb mechanischer Lasten
mit einer Lastkennlinie M = f{n2} – Pumpen und Lüfter – geeignet.
Aufgrund der additiven Überlagerung von Ständer- und Läuferfeld wird bei der Asynchronmaschine die Drehzahl n direkt durch die Frequenz der Läuferströme beeinflusst.
f -f
f
n = 1 2 = = 1 1- s
(5.35)
p
p
Dabei bezeichnet f1 die Netz- bzw. Ständerfrequenz, f2 die Frequenz der Läuferströme und p
die Polpaarzahl. Eine negative Frequenz kann als Umkehrung des Drehfeldes verstanden
werden, dies tritt bei übersynchronen Drehzahlen auf. Die relative Differenz aus
mechanischer und synchroner Winkelgeschwindigkeit, der Schlupf s, wirkt sich auch auf den
Wirkleistungsfluss aus. Dieser wird durch das Gesetz über die Aufteilung der Luftspaltleistung PL = P (Drehfeldleistung) bei einer verlustlosen Übertragung beschrieben:
P1 = P = Pmech P2 = Pmech s P1
(5.36)
P
Pmech
ASYM
P2
P1
s · P1
Bei einer verlustlosen Übertragung ist die Leistung im
Läufer P2 proportional zum Schlupf s und der Ständerwirkleistung P1. Bei der synchronen Drehzahl n1 dreht
sich also auch je nach Betriebsart der Wirkleistungsfluss
im Läufer um.
Hauptwirkleistungsfluss generatorisch untersynchron
bei der doppelt gespeisten Asynchronmaschine
Durch das Einprägen einer gewünschten Läuferstromfrequenz f2 kann die Drehzahl eingestellt
werden. Benötigt man nur einen begrenzten Drehzahlstellbereich, kann der Stromrichter
wesentlich kleiner dimensioniert werden, weil nur die s-fache Ständerwirkleistung über den
Stromrichter geführt werden muss. Über die Vergrößerung der Amplitude des Läuferstroms
können die Ständerblindströme verringert werden, da die Magnetisierungsblindleistung nicht
mehr, wie beim Käfigläufer, ausschließlich vom Ständer her gedeckt werden muss. Die
doppelt gespeiste Asynchronmaschine kann von daher sogar induktive Blindleistung abgeben,
also als Kondensator wirken (zum Beispiel als dynamischer Phasenschieber im Pumpspeicherwerk Goldisthal). Bei einer Stromregelung im Läuferkreis, wie es meist der Fall ist,
verhält sich die doppelt gespeiste Asynchronmaschine stationär genau wie eine
drehzahlvariable Synchronmaschine. In der Praxis wird für die dynamische Wirk- und
Blindleistungsregelung das Prinzip der Feldorientierung angewendet.
Hauptanwendung der doppelt gespeisten Asynchronmaschine sind Windenergieanlagen. Sie
werden bei höheren Leistungen getriebelos mit einer hochpoligen Synchronmaschine ( 1/3)
oder mit Getriebe und einer doppelt gespeisten Asynchronmaschine ( 2/3) betrieben.
G. Schenke, 2.2015
Elektrische Antriebe
FB Technik, Abt. E+I
74
Die Wirkleistungsbilanz der realen, doppelt gespeisten Asynchronmaschine im untersynchronen Motorbetrieb, wenn im Läufer elektrische Wirkleistung P 2el entnommen wird,
lautet:
P1 = PL
PFe
PCu1 und PL = Pmech
PR
PCu2
P2el
mit
s PL = PCu2
P2el
(5.37)
Die Wirkleistungsbilanz im übersynchronen Generatorbetrieb, wenn im Läufer elektrische
Wirkleistung P2el entnommen wird, lautet:
P1 = PL
PFe
PCu1
und PL = Pmech
PR
PCu2
P2el
mit
s PL =
Betriebsverhalten der doppeltgespeisten Asynchronmaschine:
P1
PCu2
(5.38)
P2 el
P1
PFe
PFe
Ständer
Ständer
PCu1
PCu1
PL
PL
P2el
P2el
Läufer
Läufer
PCu2
PCu2
PR
PR
Pmech
Pmech
untersynchroner Motorbetrieb
übersynchroner Motorbetrieb
(P2el > PCu2)
P1
P1
PFe
Ständer
PCu1
PL
PFe
Ständer
PCu1
PL
P2el
P2el
Läufer
Läufer
PCu2
PCu2
PR
PR
Pmech
Pmech
untersynchroner Generatorbetrieb
(P2el > PCu2)
G. Schenke, 2.2015
übersynchroner Generatorbetrieb
Elektrische Antriebe
FB Technik, Abt. E+I
75