BEET05 Kleinmaschinen - Lehrstuhl für Energiewandlung
Werbung

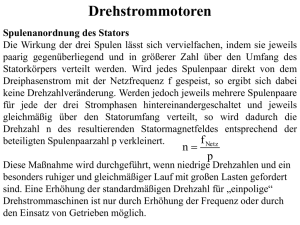
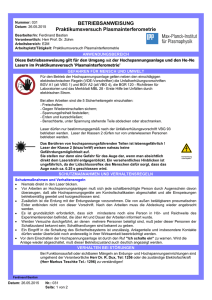
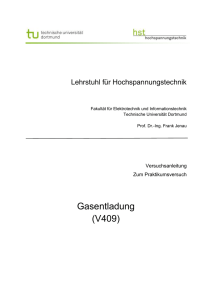
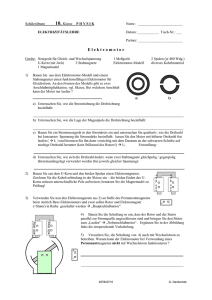
Lehrstuhl für Energiewandlung Dr.-Ing. C. Kreischer Praktikumsversuch BEET 05 Kleinmaschinen © LS-EWA (2016) Praktikumsversuch Kleinmaschinen Seite 1 1 Einleitung Elektrische Maschinen werden häufig in drei Klassen eingeteilt: in Maschinen großer, mittlerer und kleiner Leistung. Diese Klassen, die sich außer durch die Leistung auch durch besondere Eigenschaften, Ausführungsarten und Fertigungsverfahren der Maschinen unterscheiden, gehen fließend ineinander über. Die obere Leistungsgrenze von Kleinmaschinen nimmt man gewöhnlich bei einer abgegebenen Leistung von 1 kW an. Folgende, typische Merkmale sind für Kleinmaschinen kennzeichnend: Es handelt sich um Motoren zum Antreiben von Geräten, die zu den Verbrauchsgütern zählen. Daher muss die Herstellung kostengünstig sein. So zielt der Entwurf vor allem auf eine optimale Fertigung und hohen Automatisierungsgrad bei der Produktion ab. Dem Wirkungsgrad kommt nur eine untergeordnete Bedeutung zu. Neben den für Konsumgüter bestimmten Kleinmotoren gibt es hochwertige Maschinen mit optimalem Leistungsgewicht, hohem Wirkungsgrad, langer Lebensdauer und extremen Drehzahlen. Sie werden in Geräten der Datenverarbeitung, der gehobenen Unterhaltungselektronik, Medizintechnik oder der Luft- und Raumfahrttechnik eingesetzt. Aufgrund ihrer großen Stückzahlen haben Kleinmotoren eine große wirtschaftliche Bedeutung. Heute sind in einem Haushalt im Mittel 70 Kleinmotoren im Einsatz. Praktikumsversuch Kleinmaschinen Seite 2 2 Ein- und Zweiphasenasynchronmaschine Dreiphasen-Asynchronmaschinen (ASM) haben wegen ihres einfachen und robusten Aufbaus eine große Verbreitung gefunden. Das macht diesen Maschinentyp auch für Kleinantriebe interessant, und zwar unter der Voraussetzung, ihn an 1-Phasen-Wechselspannung betreiben zu können. 2.1 Aufbau Sowohl die 3-Phasen-ASM als auch die 1- und 2-Phasen-ASM besitzen einen feststehende Teil (Ständer, Stator) und einen drehbar gelagerten Teil (Rotor, bei Gleichstrommaschine: Anker). Der Ständer trägt Kupferwicklungen/Kupferspulen zur Erzeugung eines magnetischen Drehfeldes. Der Rotor besteht häufig aus einem Aluminiumkäfig. Die Stäbe des Käfigs sind über zwei Kurzschlussringe an den Enden elektrisch kurzgeschlossen (Käfigläufer). Bild 1: Stator und Käfigläufer einer Asynchronmaschine Praktikumsversuch Kleinmaschinen Seite 3 2.2 Die Wirkungsweise einer Drehstrom-Asynchronmaschine Sowohl die Ein- und Zweiphasenasynchronmaschinen als auch die Drehstromasynchronmaschinen zählen zu den sog. Induktionsmaschinen. Zum grundsätzlichen Verständnis der Wirkungsweise eines Ein- und Zweiphasenasynchronmotors ist es daher sinnvoll, die Drehstrom- Asynchronmaschine (ASM, DASM) zu kennen. Deshalb werden hier nochmals die grundlegenden physikalischen Zusammenhänge einer DASM kurz erläutert. 2.2.1 Drehfeld Entscheidend für die Funktion einer Asynchronmaschine ist ein Drehfeld (daher auch der Begriff Drehfeldmaschine). Dies wird durch die stromdurchflossenen Wicklungen im Stator erzeugt. Zur Erzeugung eines Drehfeldes müssen vorhanden sein: Wicklungen im Ständer des Motors, welche um 120°/p (p: Polpaarzahl) räumlich zueinander verdreht sind. Speisung der Wicklungen mit Dreiphasendrehstrom (drei um 120° zeitlich phasenverschobene Wechselstromsysteme). Die Drehstromwicklung ist so angeordnet, dass bei Speisung der einzelnen Wicklungen mit Gleichstrom unterschiedlicher Amplitude ein quasi-sinusförmiges magnetisches Feld im Luftspalt entsteht. Dieses Feld besitzt dann 2p Pole bzw. p Polpaare. Durch die Speisung mit Drehstrom wandert das Feld um den Umfang der Maschine. Bild 2: Verlauf eines Drehfeldes mit p=1 zu drei verschiedenen Zeitpunkten Praktikumsversuch Kleinmaschinen Seite 4 Ein Drehfeld: periodisch veränderliches Feld, bei dem die räumliche Lage der Nullstellen und Maxima zeitlich veränderlich ist, heißt Drehfeld. Ein periodisch veränderliches Feld, bei dem die Lage Wechselfeld: der Nullstellen und Maxima räumlich nicht veränderlich ist, heißt Wechselfeld. Ein Wechselfeld lässt sich durch zwei gegensinnig laufende Drehfelder mit gleicher Amplitude beschreiben. Zwei Elliptisches Drehfeld: gegensinnig laufende Drehfelder schiedlicher Amplitude erzeugen ein unter- elliptisches Dreh- feld. Zwei gleichsinnig laufende Drehfelder mit unterschied- Kreisdrehfeld: licher oder gleicher Amplitude erzeugen ein Kreisdrehfeld. Tabelle 1: Dreh- und Wechselfelder ω1 ω1 ω1 Br ω1 B1 Br ω1 ω1 B1 B2 Br ω1 B1 B2 B2 Bild 3: a) Kreisdrehfeld b) elliptisches Feld c) Wechselfeld Praktikumsversuch Kleinmaschinen Seite 5 Die Geschwindigkeit ω, mit der das Drehfeld am Umfang rotiert, ergibt sich aus der Anzahl der Polpaare p und der elektrischen Frequenz f des Stromes: wsyn = 2p f p Wird z.B. eine zweipolige Maschine, dies entspricht einer Polpaarzahl von eins mit f= 50Hz gespeist, so rotiert das Drehfeld mit ω=314,2 1/s. Häufig wird jedoch nicht die Winkelgeschwindigkeit, sondern die Drehzahl in Umdrehungen pro Minute (U/min) verwendet. Sie wird synchrone Drehzahl bzw. Drehfelddrehzahl genannt: nsyn = f p Für dieses Beispiel ergibt sich eine synchrone Drehzahl von n=50Hz=3000U/min. Eine 4-polige Maschine mit f=50Hz besitzt dem zufolge eine Drehfelddrehzahl n=1500U/min, etc. Praktikumsversuch Kleinmaschinen Bild 3a): Entstehung eines Drehfeldes durch eine Zweiphasenwicklung Seite 6 Praktikumsversuch Kleinmaschinen Seite 7 Die Wirkungsweise einer Asynchronmaschine kann man nun wie folgt erklären: Stator erzeugt ein Drehfeld mit wsyn = 2p f p Drehfeld durchsetzt den Rotor Spannungsinduktion im Rotor Rotorstäbe kurzgeschlossen Stromfluß im Rotor Statorfeld + Stromfluss im Rotor = Kraft auf Rotorwicklungen Maschine entwickelt Drehmoment und beschleunigt Bei Lauf mit Drehfeld-Drehzahl nsyn keine Spannungsinduktion im Rotor kein Rotorstrom keine Kraft bzw. kein Drehmoment Maschine wird durch innere Reibung oder durch Last gebremst es stellt sich eine Drehzahl n < nsyn ein, bei der die Maschine das erforderliche Drehmoment liefert Tabelle 2: Prinzipielle Wirkungsweise einer Asynchronmaschine Aus der Bedingung, dass die Drehzahl des Rotors nmech hinter der synchronen Drehzahl des Drehfeldes nsyn zurückbleiben muss, resultiert auch die Bezeichnung Asynchronmaschine. Um die Drehzahl von Maschinen unterschiedlicher Polpaarzahlen vergleichbar zu machen, wird die normierte Größe Schlupf s eingeführt. Der Schlupf ist definiert als Differenz zwischen mechanischer Drehzahl und synchroner Drehzahl/Drehfelddrehzahl, und zwar bezogen auf die synchrone Drehzahl: s= fsyn - f fsyn = nsyn - n nsyn Praktikumsversuch Kleinmaschinen Seite 8 Der (stationäre) Drehzahl-Drehmomenten-Verlauf einer ASM: →n Bild 5: Drehzahl-Drehmomentenkennline (M-n-Kennlinie) einer ASM Die ASM hat ein maximales Moment (Kippmoment) Mk, welches beim Kippschlupf sk auftritt. Sind diese beiden Größen bekannt, so kann der Drehzahl-DrehmomentenVerlauf durch die Kloss´sche Formel beschrieben werden: M= 2Mk sk s + s sk Praktikumsversuch Kleinmaschinen Seite 9 2.3 Einphasenmotor Ein Einphasenmotor trägt eine Wechselstromwicklung im Stator und wird mit Wechselstrom betrieben. Daher wird im Luftspalt ein Wechselfeld erzeugt. Wie bereits gezeigt, läßt sich ein Wechselfeld in zwei gegensinnig laufende Drehfelder zerlegen. Folglich kann man die Wirkung eines Einphasenasynchronmotors beschreiben als zwei gegensinnig laufende Drehfeldmaschinen gleicher Leistung an einer Welle. Die Drehzahl-Drehmomentkennlinie erhält man dann aus der Addition der Kennlinien der beiden Asynchronmaschinen (Mres=MI+MII). Bremse I M Motor I Generator I MI -ns 0 Mres =ˆ sII ns n n =ˆ sI MII Generator II Motor II Bremse II ns : synchrone Drehzahl sI : Schlupf des Motors I sII : Schlupf des Motors II Bild 6: Drehzahl-Drehmomentenverlauf (Mres) eines Einphasenasynchronmotors Wie der Drehzahl-Drehmomenten-Kennlinie zu entnehmen ist, entwickelt die Maschine kein Anzugsmoment (M(n=0)=0), d.h. die Maschine läuft nicht selbständig an. Sie muss angeworfen werden (Anwurfmotor) und dreht sich dann in die jeweilige Anwurfrichtung. Allerdings erst wenn ein Motor selbständig anlaufen kann, ist er für die Praxis brauchbar. Dazu muss (s.o.) vom Ständer ein Kreis- oder ein elliptisches Drehfeld erzeugt werden. Hierfür wird der 1-Phasen-Motor mit einem zusätzlichen Strang (Hilfsstrang) ausgeführt (zweite Phase → 2-Phasen-Motor, Zweistrangmotor). Praktikumsversuch Kleinmaschinen Seite 10 2.4 Zweiphasenmotor Der Zweiphasenmotor besitzt zwei Wicklungen, welche bei Speisung mit 90O phasenverschobenen Strömen in der Lage sind, ein elliptisches bzw. ein Kreisdrehfeld zu erzeugen. Da der Motor jedoch nur von einem Einphasennetz gespeist werden kann, besteht das Problem darin, in den Wicklungen eine Phasenverschiebung der Ströme um 90∞ zu erzielen. Dies kann man mit einem Kondensator erzielen, cher zu einer der beiden Wicklungen (i.d.R. zur Hilfswicklung) geschaltet wird. Weil die in welReihe Wicklungsimpedanzen schlupfabhängig sind, lässt sich das ideale Kreisdrehfeld nur in einem bestimmten Betriebspunkt erreichen. In diesem Punkt verhält sich eine zweisträngige Wicklung wie ein DreiphasenAsynchronmotor. Für alle anderen Betriebspunkte ergibt sich ein elliptisches Drehfeld. Für die Beschaltung zweisträngiger Motoren gibt es drei Möglichkeiten: CA 1. 2. CA CB CB M ~ UN M ~ M ~ UN UN CA = Anlauf-Kondensator CB = Betriebs-Kondensator Bild 7: Beschaltungen zweisträngiger Motoren Anstelle eines Kondensators kann auch ein Widerstand (Widerstandshilfstrangmotor) oder eine Induktivität in Reihe zur Hilfswicklung gelegt werden. In der Praxis wird jedoch am häufigsten der Kondensatormotor eingesetzt. Praktikumsversuch Kleinmaschinen Seite 11 2.4.1 Kondensatormotor Am häufigsten schaltet man Kondensatoren in Reihe zur Hilfswicklung und kann damit eine optimale Phasenverschiebung von 90° erreichen, jedoch nur für einen einzigen Betriebspunkt. Ein Betriebskondensator CB bleibt dauernd eingeschaltet. Ist ein hohes Anzugsmoment erwünscht, schaltet man einen zweiten Kondensator, einen sogenannten Anlasskondensator CA, parallel zum Betriebskondensator. Der Anlasskondensator wird nach erfolgtem Hochlaufen, etwa bei Erreichen des Kippmomentes, durch ein Relais oder einen Fliehkraftschalter abgeschaltet. Oft sieht man auch nur einen abschaltbaren Anlasskondensator vor. Der nach dem Abschalten des Hilfsstranges einsträngig wirkende Motor dreht sich ja in der Anlaufrichtung weiter. 2.4.2 Widerstandshilfsstrangmotor In einigen Fällen wird der Wirkwiderstand des Hilfsstranges gegenüber dem des Hauptstranges künstlich erhöht. Dazu legt man entweder einen ohmschen Widerstand in Serie zur Hilfswicklung oder verwendet für die Hilfswicklung Widerstandsdraht. Wegen der hohen Stromwärmeverluste im Hilfsstrang wird dieser abgeschaltet, wenn der Motor angelaufen ist. Der Widerstandshilfsstrang-Motor ist zwar kostengünstiger und noch robuster als der Kondensator-Motor, bei dem der Kondensator eher zu Ausfällen führt, erreicht aber nicht dessen große Phasenverschiebung. Praktikumsversuch Kleinmaschinen Seite 12 3 Spaltpolmotor 3.1 Aufbau Auch beim Spaltpolmotor wird die Idee verfolgt, aus 1-Phasen-Wechselspannung ein Drehfeld bzw. ein elliptisches Feld zu erzeugen. Dabei wird eine Bauform nach Bild 8b) gewählt. Die Hauptwicklung (Spule) sitzt auf dem Eisenkern. Die Hilfswicklung besteht aus kurzgeschlossenen Kupferringen, die jeweils einen Teil des Pols (Spaltpol) umschließen. Der Rotor wird als herkömmlicher Kurzschlussläufer zumeist mit Aluminiumkäfig ausgeführt. Häufig ist ein Lüfter vorgesehen, da die Stromwärmeverluste, vor allem in der Kurzschlusswicklung beträchtlich sind. Spaltpolmotoren werden in großen Stückzahlen für kleine Leistungen (bis ca. 100W) produziert. Man unterscheidet den symmetrischen (Haupt- und Hilfspol gleich groß) und den asymmetrischen Aufbau (s. Bild 8b). Der asymmetrische Aufbau ist besonders leicht zu fertigen. Hier lassen sich aber nur 2-polige Maschinen bauen. a) Der Motor treibt den Ventilator in einer Tiefkühltruhe an. Bild 8: Spaltpolmotor b) Prinzipieller Aufbau eines asymmetrischen Spaltpolmotors Praktikumsversuch Kleinmaschinen Seite 13 3.2 Die Wirkungsweise des Spaltpolmotors Der Spaltpolmotor wird am 50 Hz bzw. 60 Hz Wechselstromnetz betrieben. Daher fließt durch das Eisen und durch die Pole ein magnetischer Wechselfluss. In den Kurzschlussringen wird demzufolge eine Spannung induziert (Induktionsgesetz). Im Kurzschlussring fließt ein Strom. Dieser Strom erzeugt ebenfalls ein magnetisches Feld, welches dem ursprünglichen Feld entgegengesetzt ist (Lenz´sche Regel). Daher löscht das Magnetfeld des Ringes den Fluss durch den Spaltpol, so dass nur noch ein Fluss durch den Hauptpol verläuft. Wird der Hauptfluss zu Null, so fließt noch Strom durch den Kurzschlussring und erzeugt einen Fluss, der durch den Spaltpol verläuft. Dieser Fluss ist deutlich kleiner als der maximale Hauptfluss. t=0 t=π/4 Bild 9: Verlauf des Magnetflusses beim Spaltpolmotor Das Bild verdeutlicht, dass sich der Fluss durch den Rotor eines Spaltpolmotors zeitlich und räumlich verändert. Es entsteht ein stark elliptisches Drehfeld. Dies reicht aber aus, damit der Motor selbständig hochläuft. Praktikumsversuch Kleinmaschinen Seite 14 4 Universalmotor Universalmotoren sind, genau wie Gleichstrommaschinen, Kommutatormaschinen. Sie lassen sich sowohl mit Gleich- als auch mit Wechselstrom betreiben. Ihre Drehzahl ist unabhängig von der Netzfrequenz. Deshalb lassen sich auch wesentlich größere Drehzahlbereiche als bei Asynchronmotoren oder bei Spaltpolmotoren erreichen. Die Drehzahlstellung ist recht unkompliziert (Veränderung der Ankerspannung). Daher hat der Universalmotor eine große Bedeutung für Kleinantriebe (z.B. drehzahlvariable Bohrmaschine). Das Wirkprinzip beruht auf dem Gleichstrommotor (GM). Um die Drehrichtung eines GM umzukehren, muss entweder die Richtung des Ankerstroms oder die Richtung des Erregerstroms geändert werden. Geschieht beides gleichzeitig, so ändert sich die Drehrichtung nicht. Werden nun Anker und Erregung in Reihe geschaltet (Reihenschlussmaschine), so werden bei Betrieb mit Wechselstrom sowohl Anker als auch Erregung jeweils gleichzeitig umgepolt. Somit ändert sich die Richtung des erzeugten Drehmomentes nicht. Jedoch ist das Moment zeitlich nicht konstant (wie bei Betrieb mit Gleichstrom), sondern pulsierend. 4.1 Aufbau Im Gegensatz zur Gleichstrommaschine werden beim Universalmotor aufgrund der auftretenden Wechselfelder im Luftspalt, die Erregerpole geblecht. Dies reduziert die induzierten Wirbelströme im Statorblech. Der Universalmotor wird i.d.R. 2-polig ausgeführt. Anker- und Erregerwicklung werden immer in Reihe geschaltet (Reihenschlussmotor). Bei den Kleinmaschinen wird i.d.R. aus Kostengründen immer auf Wendepole und Kompensationswicklung zur Verbesserung der Kommutierung verzichtet. 4.2 Wirkungsweise Die Drehmomentbildung erfolgt nach dem gleichen Prinzip wie beim Gleichstrommotor, welches hier nochmals wiederholt wird. Auf einen stromdurchflossenen Leiter im Magnetfeld wirkt die Lorentzkraft: Praktikumsversuch Kleinmaschinen Seite 15 → → → F = I ⋅ (L× B) F: Lorentzkraft I: Strom durch den Leiter L: Leiterlänge B: Magnetische Flussdichte Das magnetische Feld H, bzw. die magnetische Flussdichte B des Ständers wird von den Erregerpolen oder von Permanentmagneten erzeugt, und durchsetzt den Anker (Rotor), auf dem die Ankerwicklungen angebracht sind. Dort fließe der Strom I. Die resultierende Kraft F führt nun dazu, dass ein Drehmoment auf den Anker wirkt. Die daraus entstehende Drehbewegung und die Wirkung des Kommutators sind in folgenden Bildern verdeutlicht. Das Feld B wird in diesem Beispiel von einem Permanentmagneten erzeugt. Diese Beispielmaschine hat nur eine Wicklung, und soll lediglich das Funktionsprinzip verdeutlichen. Praktikumsversuch Kleinmaschinen Seite 16 Bild 10: Entstehung des Drehmoments bei einer GM Mit einer einzelnen Wicklung kann jedoch keine große Kraft und damit auch kein großes Drehmoment erreicht werden. Daher enthält eine reale Maschine viele Wicklungen. Entscheidend ist die dabei Anordnung der Wicklung. Im folgenden Beispiel wird hier eine Trommelwicklung mit 8 Läuferspulen gezeigt. Praktikumsversuch Kleinmaschinen Seite 17 4 2 1 2 3 1 3 8 4 N 4 8 2 3 1 6 3 7 5 7 5 5 6 4 2 7 1 6 8 a) Trommelwicklung mit 4 Spulen b) Vereinfachte Darstellung der Trommelwicklung Bild 11: Trommelwicklungen Die in den oberen Bildern gezeichnete Läuferstellung und Stromverteilung sei nochmals verdeutlicht: 1. Der Strom wird über die rechte Bürste in die Lamelle 3 eingespeist. 2. Lamelle 3 speist die Spulen 5/8 und 6/3. 3. Strom fließt über die Spule 5/8 zur Lamelle 4 und über Spule 6/3 zur Lamelle 2. 4. Lamelle 4 Æ Spule 7/2 Æ Lamelle 1. 5. Lamelle 2 Æ Spule 4/1 Æ Lamelle 1. 6. Über die linke Bürste schließt sich der Stromkreis. 7. S Praktikumsversuch Kleinmaschinen Seite 18 4.3 Kommutierung Wie gesehen, wird bei der Gleichstrommaschine der Strom in den Ankerwicklungen bei Drehung laufend umgepolt. Den Umpolvorgang nennt man Kommutierung. Bild 12: Kommutierungsvorgang Demnach fließt in einer Ankerwicklung ein pulsierender Gleichstrom mit der Frequenz fel = n*p. Der Kommutierungsvorgang ist sehr wichtig für den Betrieb der Gleichstrommaschine. In einer Spule findet innerhalb kurzer Zeit eine große Stromänderung dI Spule dt statt. Da jede Spule eine Induktivität besitzt, wird während der Kommutierung eine Spannung gemäß U = -L dISpule dt induziert (Selbstinduktion). Die Spule dreht sich außerdem im Erregerfeld. Auch hiervon wird eine Spannung induziert. Letzteres kann verhindert werden, wenn sich die Bürsten an der Stelle befinden, an der das Hauptfeld den Wert Null annimmt. Diesen Bereich nennt man auch neutrale Zone. Praktikumsversuch Kleinmaschinen Seite 19 Gerade beim Universalmotor ist eine funkenfreie Kommutation praktisch nicht möglich. Es wird immer eine Spannung in der durch die Kommutatorbürsten kurzgeschlossenen Wicklung induziert (s.o.). Die eine Ursache der Spannungsinduktion ist das zeitlich veränderliche Feld in der Maschine durch den Betrieb der Erregerwicklung mit Wechselstrom. Man spricht hier von der transformatorisch Ankerspannung. Weiterhin wird auch durch induzierten die Rotation der Wicklung im Magnetfeld eine Spannung induziert. Demnach spricht man von der rotatorisch induzierten Ankerspannung. Damit ist die gesamte in der kurzgeschlossenen Spule induzierte Spannung abhängig vom Betriebspunkt. Aus diesem Grund kann die Kommutierung nur für einen Betriebspunkt optimal eingestellt werden. Daher tritt beim Universalmotor immer Bürstenfeuer auf. Dies ist vertretbar, da die Motoren in den meisten Fällen nicht im Dauerbetrieb arbeiten (z.B. Haushaltsgeräte, Werkzeuge). Beim Universalmotor ist der Ankerstrom zeitlich veränderlich, d.h. der Strom in den einzelnen Ankerwicklungen kommutiert nicht - wie bei einer Gleichstrommaschine zwischen zwei betragsmäßig gleichen Werten, sondern zwischen den Werten einer Sinuskurve. a) Kommutierung bei Wechselstrom Bild 13: Stromverlauf in der Ankerwicklung b) Kommutierung bei Gleichstrom Praktikumsversuch Kleinmaschinen Seite 20 6 Verständnisfragen 1. Was unterscheidet Kleinmaschinen von mittleren und großen Maschinen? 2. Wie lässt sich bei einer Dreiphasenwicklung die Drehrichtung des entstehenden Drehfeldes umkehren? 3. Welches Drehmoment liefert eine Asynchronmaschine, wenn sie mit synchroner Drehzahl läuft? 4. Welche Frequenz hat der Strom im Rotor einer Asynchronmaschine im Stillstand? 5. Was für Vorteile hat die Asynchronmaschine? 6. Warum kann eine Einphasenmaschine nicht selbstständig anlaufen? 7. Wodurch wird die Drehrichtung eines Einphasenmotors festgelegt? 8. Warum werden bei Zweiphasenmotoren u.a. Anlauf- und Betriebskondensatoren vorgesehen? 9. Wie kann die Drehrichtung eines Zweiphasenmotors umgekehrt werden? 10. Welche Arten von Spaltpolmotoren gibt es? 11. An welchem Teil eines Spaltpolmotors sind im Betrieb die höchsten Erwärmungen zu erwarten? 12. Wie lässt sich die Drehzahl eines Spaltpolmotors ändern? 13. Welche Maschinen besitzen einen höheren Wirkungsgrad: Zweiphasenmotoren oder Spaltpolmotoren? Warum? 14. Welche Maschinentypen haben einen Käfig im Rotor? 15. Welche grundsätzliche Eigenschaft unterscheidet eine Universalmaschine von den anderen vorgestellten Maschinentypen? 16. Warum werden die Erregerpole von Universalmaschinen geblecht? Praktikumsversuch Kleinmaschinen 18. Wie lässt sich die Drehzahl einer Universalmaschine und wie die Drehrichtung ändern? 19. Warum darf bei einer fremderregten Gleichstrommaschine nicht ohne weiteres die Erregerspannung heruntergefahren werden? Seite 21 Praktikumsversuch Kleinmaschinen Seite 22 7 Versuchsteil 7.1 Ein- und Zweiphasenasynchronmaschine sw Identifizieren Sie die Anschlüsse der Mo- toren, indem Sie die Wicklungswiderstände messen (notieren Sie diese). Dabei ist der Widerstand der Hilfswicklung M ~ br größer, da hier Leiter mit kleinerem Querschnitt verwendet werden. bl Bild 14: Zweiphasen-ASM i. Prinzip des Anwurfmotors a) Schließen Sie am Asynchronmotor mit symmetrischer Wicklung nur eine Wicklung an (Phase L1 an den blauen Anschluss, den Neutralleiter N an den braunen Anschluss und der schwarze Anschluss bleibt offen). Schalten Sie den Motor an das Netz (ohne ihn zu belasten), erhöhen Sie die Transformatorspannung in 50V Schritten von und 0V versuchen bis Sie max. ihn 230V anzuwerfen. Wie verhält sich qualitativ die Leerlaufdrehzahl diesen verschiedenen Spannungen? Erstellen Sie hierzu eine Tabelle in der Sie die verschiedenen Werte eintragen und diese anschließen in Ihrem Bericht interpretieren. b) Schließen Sie nun auch die zweite Wicklung an (den schwarzen Anschluss ebenfalls an Phase L1 anlegen, ohne zusätzliche Impedanz im Hilfskreis) und wiederholen Sie den Versuch. c) Führen Sie die beiden obigen Versuchspunkte nun mit dem asymmetrisch gewickelten Motor durch. Bericht: Notieren Sie ihre Ergebnisse und erläutern Sie anhand der obigen Feststellungen die Unterschiede der beiden Wicklungsarten! Praktikumsversuch Kleinmaschinen ii. Zweiphasenasynchronmaschine Schließen Sie nun einen Kondensator in Reihe zum Hilfskreis und wiederholen Sie den Versuch erneut. Wie lässt sich die Drehrichtung umkehren? iii. Kennlinie der Zweiphasenasynchronmaschine (Versuchsaufbau: Kondensatormotor mit Hysteresebremse) Messen sie die Drehzahl-Drehmomenten-Kennlinie des Kondensatormotors für die Ständerspannungen 90 V und 120 V. Dazu legen sie die entsprechende Ständerspannung an die Klemmen 1 und 2 der Maschine an. An der Welle der Kondensatormaschine ist über zwei Kupplungen ein Drehmomentenaufnehmer installiert. Mit diesem Drehmomentenaufnehmer ist es möglich sowohl Drehmoment als auch Drehzahl direkt zu messen. Je nach Drehzahl bzw. Drehmoment erzeugt der Drehmomentenaufnehmer, auf dem jeweiligen Kanal, eine Spannung zwischen 0 und 5 V. Diese Spannungswerte werden durch einen X/Y-Schreiber aufgezeichnet. Durch einen Spannungsteiler wird die Drehzahl an die Hysteresebremse weiter gegeben. Beginnen Sie die Aufnahme der Kennlinie bei der maximalen Motordrehzahl (ohne Belastung des Motors). Erhöhen Sie nun langsam die Belastung für den Motor durch Einstellen eines Bremsstromes - die Motordrehzahl sinkt, der Strom der Hysteresebremse steigt. Um die Stromwerte aus der Aufzeichnung des XY-Schreibers ablesen zu können, muss die Stromachse kalibriert werden. Messen Sie hierzu das Drehmoment, den Hysteresestrom und die Drehzahl und ermitteln Sie anschließend in Ihrem Bericht den Maßstab der Stromachse. Dazu wird z.B. der Stromwert I = 80 mA auf dem Papier der Kennlinie eingetragen. Wichtig! : Die Drehzahl wird mit dem optischen Drehzahlsensor ermittelt. Messen Sie die Strom- und Drehzahlwerte für den Leerlauf, für I= 80 mA sowie für das Kippmoment Seite 24 Praktikumsversuch Kleinmaschinen Seite 24 Bericht: Mithilfe der Strom-Drehmoment-Kennlinie der Hysteresebremse (siehe S. 25) kann das Drehmoment der Asynchronmaschine ermittelt werden. Zeichnen Sie jeweils eine Ordinatenachse für den Strom der Hysteresebremse sowie für das Drehmoment und skalieren Sie diese sinnvoll. Auf der Abszisse soll die Drehzahl aufgetragen und ebenfalls sinnvoll skaliert werden. Praktikumsversuch Kleinmaschinen Seite 25 Hysteresebremse HB-210-2 M [Nm] 3 2,5 2 1,5 1 0,5 0 0 0,05 0,1 0,15 I [A] 0,2 0,25 0,3 Praktikumsversuch Kleinmaschinen Seite 26 7.2 Spaltpolmotor i. Erwärmung Der symmetrische Spaltpolmotor ist mit zwei Platinwiderständen PT 100 (100 Ω bei 0 °C) versehen. Dabei ist einer direkt auf dem Ständerkurzschlussring befestigt, der andere am Blechpaket. Der jeweils angeschlossene PT 100 wird mit einem konstanten Strom von Imess = 10 mA gespeist. Die Temperatur wird dann über den Spannungsabfall des Widerstandes bestimmt. Bei einer Temperatur von 0 °C fällt also eine Spannung von 1 V ab. Die Aufzeichnung dieser Messung erfolgt mittels eines Schreibers. Kalibrieren Sie den Messaufbau so, dass Sie bei einer Temperatur von 110 °C am Schreiber Vollausschlag erhalten (UMotor = 230 V). Achtung: Nach jeder der folgenden Messungen ist der Motor mit dem Ventilator auf ca. 30 °C – 40 °C herunterzukühlen. Messungen: a) Erwärmung des Kurzschlussringes bei unbelastetem Motor und UMotor = 230V b) Erwärmung des Kurzschlussringes bei unbelastetem Motor und UMotor = 150V Bericht: Interpretieren Sie Ihre Ergebnisse und notieren Sie diese. Markieren Sie die Anfangs, die maximale sowie die Endtemperatur und skalieren Sie die Achsen dementsprechend sinnvoll! ii. Elliptisches Drehfeld Schließen Sie den asymmetrischen Spaltpolmotor an (UMotor = 230 V). Oszillographieren Sie die Spannungen in den Messwicklungen. Welche Rückschlüsse ergeben sich hieraus für die magnetischen Flüsse im Haupt- als auch im Hilfspols des Ständers. Bericht: Erklären Sie anhand ihrer Beobachtung das Funktionsprinzip des Spaltpolmotors. Skizzieren Sie die beiden magnetischen Flüsse, welche Phasenverschiebung ergibt sich? Praktikumsversuch Kleinmaschinen Seite 27 7.3 Universalmotor Universalmotor: L+/L1 L-/L1 1 A1 I 2 M D1 D2 A2 Bild 15: Universalmotor Fremderregte Gleichstrommaschine: L+ L+ L- LA1 2 IF G A2 F2 3 F1 1 4 Bild 16: Fremderregte Gleichstrommaschine A C H T U N G: Bevor Sie den Maschinensatz einschalten, muss die Erregerspannung des fremderregten Gleichstromgenerators auf Uerr,min=25 V(siehe Bild 16) eingeschaltet werden. Praktikumsversuch Kleinmaschinen Seite 28 Schließen Sie den Lastwiderstand (25 Ω) in den Ankerkreis (Klemmen 2 und 4) der Maschine an. Verschalten Sie die beiden Wattmeter so, dass Sie die aufgenommene (Universalmaschine) und abgegebene (Gleichstrommaschine) elektrische Leistung messen können. i. Bürstenfeuer Belasten Sie die Gleichstrommaschine mit einem Ankerstrom IA = 0,6 A. Betreiben Sie die Universalmaschine nacheinander mit Gleich- und Wechselstrom und untersuchen Sie die Bildung des Bürstenfeuers. ii. Drehzahl-Drehmomenten-Kennlinie Bestimmen Sie die Drehzahl-Drehmomenten-Kennlinie des Universalmotors bei Gleich- und Wechselstrom aus der abgegebenen mechanischen Leistung Pmech. Beginnen Sie die Aufnahme der Kennlinie bei Wechselspannungsbetrieb mit Uerr = 25V und bei Gleichspannungsbetrieb mit der doppelten Erregerspannung, also 50V. Belasten Sie den Maschinensatz indem Sie die Erregerspannung der Gleichstrommaschine in 5V Schritten gleichmäßig erhöhen und messen Sie in jedem Punkt die aufgenommene Wirkleistung (Pauf, el), die abgegebene elektrische Leistung (Pab, el), die Drehzahl n mittels des Handtachometers und den Ankerstrom Ia bei vorgegebener Betriebsspannung UMotor. Erstellen Sie hierzu eine Tabelle in Querformat. Betriebsspannung am Universalmotor : - Gleichspannung: UMotor = 60 V, Wechselspannung: UMotor = 90 V~ Der Ankerwiderstand der Gleichstrommaschine beträgt: RAnker = 7,5 Ω. Praktikumsversuch Kleinmaschinen Seite 29 Die Drehzahl-Drehmomenten-Kennlinie und der Wirkungsgrad lassen sich mit folgenden Gleichungen bestimmen: M= Pmech 60 1 = Pmech ⋅ ⋅ wmech 2p n 2 Pmech = Pab,el + RAnker ⋅ I Anker h= Pmech Pauf,el Bericht: Legen Sie eine Tabelle in Querformat an, in der folgende Werte aufzuführen Sind (einige Werte sind mit Hilfe der oben genannten Formeln zu bestimmen): • Drehzahl n [1/min], • Drehmoment M [Nm], • Wirkungsgrad η [%], • aufgenommene elektrische Wirkleistung Pauf, el [W], • abgegebene elektrische Wirkleistung Pab, el [W], • Ankerstrom IAnker [mA] und die • mechanische Wirkleistung Pmech [W]. Zeichnen Sie die Drehzahl-Drehmomenten-Kennlinie (M = f(n)) auf und interpretieren Sie deren Verlauf in Bezug auf die typischen Eigenschaften eines Reihenschlussmotors. Anmerkung: Bei diesem Verfahren wird das Drehmoment über die von der Gleichstrommaschine abgegebene elektrische Leistung bestimmt. Dabei nimmt man vereinfacht an, dass in der Gleichstrommaschine nur ohmsche Verluste in der Ankerwicklung auftreten. Bestimmen Sie jeweils für Gleich- und Wechselstrombetrieb auch den Wirkungsgrad der Universalmaschine und tragen Sie diesen über die Drehzahl auf. Binden Sie beide Kennlinien (Drehzahl -Drehmomenten-& Drehzahl –Wirkungsgrad-Kennlinie) mit 2 unterschiedlichen Achsen in ein Diagramm ein. Praktikumsversuch Kleinmaschinen 8 Seite 31 Sicherheitsrichtlinien für das Maschinen- und Leistungselektroniklabor In den Laborräumen sind größere Berührungsspannungen als 30 Veff vorhanden. Bei Arbeiten in den Laborräumen ist daher größte Vorsicht geboten. A. Schaltungsaufbau 1. Der Auf- und Abbau von Schaltungen darf nur im spannungslosen Zustand und bei Stillstand aller Maschinen erfolgen. 2. Auf eine sachgemäße Erdung aller Geräte ist besonderer Wert zu legen. Der Netzanschluss eines Messgerätes ohne vorgesehenen Schutzleiter ist nur ausnahmsweise und mit Genehmigung des Betreuers gestattet. 3. Der Umbau von Schaltungen darf nicht bei Spannungen über 30 Veff durchgeführt werden. 4. Bei Spannungen über 30 Veff dürfen keine spannungsführenden Teile der Schaltung berührt werden, auch nicht mit einer Hand allein. 5. Bei der Verwendung von Widerstandsdekaden und Schiebewiderständen in Experimentierschaltungen ist darauf zu achten, dass diese nicht durch unzulässig große Ströme beschädigt werden. Vor dem Einsatz dieser Geräte sind die Ströme im Voraus zu berechnen und mit den zulässigen Werten zu vergleichen. 6. Vor dem Um- und Abbau von Schaltungen sind bei abgeschalteter Versorgungsspannung Kondensatoren, welche noch eine Restladung haben können, zu entladen. Dabei ist Punkt 4 zu beachten. 7. Jeder Eingriff in Geräte ist nur mit Genehmigung des Betreuers zulässig. 8. Wird oder ist ein Bauteil/Gerät beschädigt oder hat den Anschein defekt zu sein, so ist der Benutzer verpflichtet, die Beschädigung dem Lehrstuhl umgehend zu melden (bzw. bei Praktika dem Betreuer), damit die erforderlichen Reparaturen eingeleitet werden können. 9. Aufgebaute Schaltungen sind vor dem Einschalten der Spannung vom Betreuer des Versuchs (der Arbeit) zu kontrollieren. Praktikumsversuch Kleinmaschinen Seite 32 10. Von rotierenden Teilen ist Abstand zu halten. Sie sind so aufzustellen, daß eine unbeabsichtigte Berührung vermieden wird. 11. Es ist nicht mit feuchten Händen an elektrischen Anlagen und Schaltungen zu arbeiten. Daher ist Essen und Trinken während der Arbeit im Labor untersagt. Dafür können kurze Pausen eingelegt werden. B. "Not-Aus"-Schalter 12. Bei einem Unfall sind sofort alle Spannungen abzuschalten bzw. der "Not-Aus"Schalter zu betätigen sowie die aufsichtführende Person zu verständigen. 13. Informieren Sie sich vor Beginn des Versuches über die Lage des "Not-Aus"Schalters. Der Zugang zu diesem Schalter darf in keiner Weise behindert werden. Der "Not-Aus"-Schalter darf nur im Ernstfall betätigt werden. C. Allgemeine Richtlinien 14. Jeder ist verpflichtet, Erste Hilfe zu leisten. Informieren Sie sich vor Beginn der Arbeiten im Labor über sicherheitsrelevante Dinge (Telefon, Ersthelfer, Rettungsmittel, Fluchtwege, ...). 15. Neben der Einhaltung dieser Sicherheitsrichtlinien wird eine weitgehende Eigenverantwortlichkeit der Studenten verlangt, da durch die Einhaltung dieser Richtlinien allein noch nicht allen möglichen Unfällen im Labor vorgebeugt werden kann.