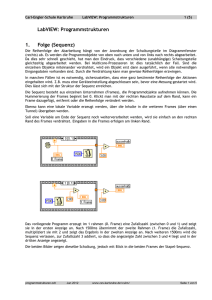
Steuerungstechnik - Carl-Engler-Schule
Werbung

Steuerungen in der Mechatronik Carl-Engler-Schule Karlsruhe Technisches Gymnasium Steuerungstechnik Inhaltsverzeichnis Steuerungstechnik............................................................................................................................ 1 1 Grundbegriffe................................................................................................................................ 4 1.1 Was bedeutet steuern?..........................................................................................................4 1.2 Analog - Digital - Binär...........................................................................................................5 2 Steuerungen mit binären Signalen................................................................................................6 2.1 Digitale Grundverknüpfungen................................................................................................6 2.2 Schaltung nach Funktionsgleichung (3 Eingänge, 1 Ausgang)..............................................8 2.3 Schaltung nach Funktionsgleichung (3 Eingänge, 2 Ausgänge)............................................9 2.4 Entwurf einer Schaltung aus Grundelementen: Wechselschaltung......................................10 2.5 Disjunktive Normalform: eine systematische Lösungsmöglichkeit........................................11 2.6 Prüf- und Sicherheitsschaltung (Übung)..............................................................................12 2.7 Majoritätsschaltung: 2-aus-3-Schaltung (Übung).................................................................13 2.8 Schaltungsvereinfachung.....................................................................................................14 2.9 Schaltungsvereinfachung mit dem KV-Diagramm................................................................15 2.10 Regeln zur Vereinfachung mit dem KV-Diagramm.............................................................15 2.11 Übungen Schaltungsvereinfachung...................................................................................16 2.12 Leuchtpunktanzeige (Übung).............................................................................................17 2.13 Leuchtbandanzeige, "Thermometercode" (Übung)............................................................18 2.14 Teichbefüllungssteuerung (Übung)....................................................................................19 2.15 Zahlensysteme.................................................................................................................. 20 2.16 Windrichtungsanzeige für Windkraftanlage (Übung)..........................................................22 2.17 Sturmsicherung für eine Windkraftanlage (Übung)............................................................24 3 Umsetzung von analogen in digitale Signale und umgekehrt......................................................25 3.1 Digital-Analog-Umsetzer......................................................................................................25 3.2 Analog-Digital-Umsetzer......................................................................................................27 3.3 Komparator (Schwellwertschalter) ohne Hysterese.............................................................28 3.4 Komparator (Schwellwertschalter) mit Hysterese (Schmitt-Trigger).....................................28 3.5 Analoger Schwellwertschalter (Komparator) in LOGO.........................................................29 3.6 Analoger Schadstoffmelder (Übung)....................................................................................31 3.7 Schadstoffkonzentrationsanzeige mit 3 Stufen (Übung).......................................................32 3.8 2-Bit-Analog-Digital-Umsetzer aufgebaut aus 4 Schwellwertschaltern.................................33 3.9 Pumpensteuerung für thermische Solaranlage (Übung)......................................................34 3.10 Jalousiesteuerung (Übung)................................................................................................34 3.11 Temperaturmessung mit PT1000 und Messverstärker (Übung).........................................35 3.12 Heizungsregelung mit 2-Punkt-Regler (Übung)..................................................................36 3.13 Heizungs-Zweipunktregeler mit Temperaturvorwahl am Poti.............................................37 3.14 Fernschalten der Heizung mit dem Smartphone (Übung)..................................................38 4 Speichern von Informationen.......................................................................................................39 4.1 Erklärung des Begriffs Speichern am Beispiel Fahrstuhlanforderung..................................39 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 1 von 76 Steuerungen in der Mechatronik Carl-Engler-Schule Karlsruhe Technisches Gymnasium 4.2 RS-Flipflop........................................................................................................................... 39 4.3 RS-Flipflop aus Grundgattern..............................................................................................39 4.4 Funktionsbaustein RS-Flipflop.............................................................................................40 4.5 Selektive Bandweiche.......................................................................................................... 41 4.6 Milchanlage.......................................................................................................................... 42 4.7 Reaktionstester.................................................................................................................... 43 4.8 Straßenbahn........................................................................................................................ 44 5 Zeitgeber, Timer.......................................................................................................................... 45 5.1 Einschaltverzögerung.......................................................................................................... 45 5.2 Logo-Ausschaltverzögerung................................................................................................45 5.3 Norm-Ausschaltverzögerung................................................................................................46 5.4 Lauflicht mit Norm-Ausschaltverzögerungen........................................................................46 5.5 Automatisches Lauflicht.......................................................................................................47 5.6 Einfache Ampelsteuerung....................................................................................................47 5.7 Fußgänger-Ampel................................................................................................................ 47 5.8 Fußgänger-Bedarfsampel....................................................................................................47 6 Prinzip von Ablaufsteuerungen....................................................................................................49 6.1 Funktion einer Schrittkette...................................................................................................49 6.2 Grafische Ablaufdarstellung einer einfachen Befüllung........................................................50 6.3 Zugehöriges Zeitablaufdiagramm: einfache Befüllung.........................................................51 6.4 Schaltung aufgebaut in LOGO.............................................................................................52 7 Ablaufsteuerung einer Waschstraße...........................................................................................53 7.1 Aufgaben............................................................................................................................. 54 7.2 Ablaufdarstellung Waschstraße...........................................................................................54 7.3 Zeitablaufdiagramm Waschstraße.......................................................................................55 7.4 Waschstraße Steuerungsschaltung mit Schrittkette aus RS-Flipflops..................................56 7.5 Schrittkette Waschstraße in LOGO......................................................................................57 8 Schaltwerk für eine Waschmaschine...........................................................................................58 8.2 Aufgaben............................................................................................................................. 58 8.3 Ablaufdarstellung Waschmaschine......................................................................................59 8.4 Zeitablaufdiagramm Waschmaschine..................................................................................60 8.5 Erklärung der Funktion des Zeitgebers (Timers)..................................................................60 8.6 Schrittkette Waschmschine, realisiert mit LOGO.................................................................61 9 Schwimmbecken mit Sonnenkollektorheizung.............................................................................62 9.1 Technologieschema............................................................................................................. 62 9.2 Gewünschter Ablauf............................................................................................................. 62 9.3 Aufgaben............................................................................................................................. 62 9.4 Ablaufdarstellung................................................................................................................. 63 9.5 Zeitablaufdiagramm............................................................................................................. 63 9.6 Schrittkette in LOGO mit analoger Temperaturmessung und Meldetexten..........................64 10 Mischanlage.............................................................................................................................. 65 10.1 Technologieschema........................................................................................................... 65 10.2 Gewünschter Ablauf........................................................................................................... 65 10.3 Aufgaben........................................................................................................................... 65 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 2 von 76 Steuerungen in der Mechatronik Carl-Engler-Schule Karlsruhe Technisches Gymnasium 10.4 Zusatzaufgabe................................................................................................................... 65 10.5 Ablaufdarstellung............................................................................................................... 66 10.6 Zeitablaufdiagramm........................................................................................................... 67 10.7 Mischanlage Schrittkette mit 3 Schritten in LOGO.............................................................68 10.8 Mischanlage Schrittkette mit 4 Schritten in LOGO.............................................................69 10.9 Mischanlage mit analogem Füllstandssensor des Mischbehälters.....................................70 In Arbeit! Letzte Aktualisierung 03.09.15 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 3 von 76 Steuerungen in der Mechatronik 1 Grundbegriffe 1.1 Was bedeutet steuern? Sensoren Eingabe Steuerung Aktoren Verarbeitung Ausgabe Carl-Engler-Schule Karlsruhe Technisches Gymnasium Abhängig von den Eingangsgrößen, die Sensoren liefern werden, werden Ausgangsgrößen mit Hilfe von Aktoren beeinflusst. Die Eingangs- und Ausgangsgrößen können analog oder digital sein. 1.1.1 Beispiele für Sensoren • • • • • Schalter, Taster Temperatursensor Drucksensor Helligkeitssensor Bewegungssensor 1.1.2 Beispiele für Steuerungen • • • • • • • Fahrstuhlsteuerung, Garagentorsteuerung Ampelsteuerung, Treppenhauslicht Waschmaschinensteuerung Heizungssteuerung Ausrichtung einer Windkraftanlage Automatisches Mischen eines Stoffes Abfüllanlage 1.1.3 Beispiele für Aktoren • • • • Motor, Lüfter, Ventilator Pumpe, Ventil Beleuchtung Heizung 1.1.4 Beispiel für ein einfaches Steuerungssystem 24V 24V 24V 24V LogoKleinsteuerung GND Eingabe Verarbeitung Ausgabe Zwei Schalter sind an eine Logo-Kleinsteuerung angeschlossen und schalten über zwei Relaiskontakte zwei 24V- oder 230V-Lampen. Die Kleinsteuerung benötigt eine Versorgungsspannung, damit in ihr ein Programm abgearbeitet werden kann. An den Ausgängen verwendet man oft Relaiskontakte. Dann kann man den Verbraucher und die Versorgungsspannung frei wählen. Die Relaiskontakte schließen dann einen vollständigen Stromkreis. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 4 von 76 Steuerungen in der Mechatronik 1.2 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Analog - Digital - Binär Steuerungen arbeiten mit analogen und digitalen Signalen. 1.2.1 Analog • • • Es sind unendlich viele Zwischenwerte sind möglich. Beispiel: Spannung zwischen 0V und 10V Eine Uhr mit mechanischen Zeigern ist eine Analoguhr. 1.2.2 Digital • • • Es sind abzählbar viele Zustände möglich. Beispiel. Analoge Musik und Sprache wird vor der Speicherung im PC / Handy / MP3Player / CD digitalisiert in 256 (8-Bit) oder 65536 (16-Bit) Spannungswerte Farben auf dem PC-Bildschirm oder im Foto werden in abzählbar viele Abstufungen digitalisiert (z.B. 8, 16, 24 Bit) 1.2.3 Binär (boolean) • • • Zwei digitale Zustände bezeichnet man als binär. Logisch 1 = High (H) = wahr = true Logisch 0 = Low (L) = falsch = false In einer Steuerung verwendet man z.B. binäre Signale: • Taster am Eingang nicht gedrückt (0V) -> Low -> 0 • Taster am Eingang gedrückt (24V) -> High -> 1 • 1 -> Kontakt am Ausgang geschlossen -> Lampe leuchtet • 0 -> Kontakt am Ausgang offen -> Lampe leuchtet nicht Zunächst beschäftigen wir uns mit digitalen Steuerungen. Obwohl diese nur 2 Zustände kennt, bezeichnet man sie nicht als Binärtechnik, sondern als Digitaltechnik. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 5 von 76 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Steuerungen in der Umwelttechnik 2 Steuerungen mit binären Signalen 2.1 Digitale Grundverknüpfungen Funktionsgleichung Symbol NOT (Negation) NICHT A 1 Y & B Y 1 Y B Steuerungstechnik-Mech2015.odt Otto Bubbers in Worten A Y 0 1 1 0 Y=A&B Y = A AND B Y=A●B Y = A B B 0 0 1 1 A 0 1 0 1 Y 0 0 0 1 Nur wenn alle beschalteten Eingänge 1 sind, wird der Ausgang eins (LED leuchtet). Y=A+B Y = A OR B Y=A+B Y = A B B 0 0 1 1 A 0 1 0 1 Y 0 1 1 1 Wenn mindestens ein beschalteter Eingang 1 ist, wird der Ausgang 1. OR (Disjunktion) ODER A Funktionstabelle Y = !A Y = NOT A Y = /A Y= A AND (Konjunktion) UND A Symbol in LOGO Eingänge: I Ausgänge: Q Amerikanische Darstellung z.B. Labview Wenn der Schalter am Eingang aus ist, leuchtet die LED aus Ausgang und umgekehrt. 6 von 76 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Steuerungen in der Umwelttechnik NAND A B 0 0 1 1 A 0 1 0 1 Y 1 1 1 0 B 0 0 1 1 A 0 1 0 1 Y 1 0 0 0 Y=A$B Y = A XOR B Y = A*/B + /A*B Y = A B B 0 0 1 1 A 0 1 0 1 Y 0 1 1 0 Nur wenn genau ein Eingang 1 ist, wird der Ausgang 1. (nur 2 Eingänge möglich) Y = A !$ B Y = A XNOR B Y = A*B + /A*/B Y = A B B 0 0 1 1 A 0 1 0 1 Y 1 0 0 1 Wenn die Eingänge gleich sind, wird der Ausgang 1. (nur 2 Eingänge möglich) Y = !(A & B) & B Y = NOT(A AND B) Y NOR Y = /(A ● B) Y = A B Y = !(A + B) A 1 Y = NOT (A AND B) Y B Y = /(A + B) Y = A B XOR (Antivalenz) A B =1 Y XNOR (Äquivalenz) A B = Y UND / ODER / NAND / NOR XOR und NXOR Steuerungstechnik-Mech2015.odt Otto Bubbers Wie ein UND, dessen Ausgang invertiert ist. Ausgang wird 1, sobald mindestens ein Eingang 0 ist. Wie ein ODER, mit invertiertem Ausgang. Ausgang wird 1, wenn alle Eingänge 0 sind. Verknüpfungen können beliebig viele Eingänge haben. ... nur 2 Eingänge. 7 von 76 Steuerungen in der Mechatronik 2.2 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Schaltung nach Funktionsgleichung (3 Eingänge, 1 Ausgang) Eingänge: 3 Schalter I1 bis I3 Ausgänge: 2 LEDs Q1 und Q2 Aufgaben: • Bauen Sie folgende Schaltungen mit der LOGO!-Steuerung auf: Q1 = / I1 * I2 * / I3 (sprich: NICHT I1 UND I2 UND NICHT I3) Q2 = I1 * / I2 * / I3 (sprich: I1 UND NICHT I2 UND NICHT I3) • Vervollständigen Sie die Funktionstabelle • Erklären Sie in Worten, in welchen Fällen die LEDs Q1 und Q2 leuchten. Schaltung und Funktionstabelle: I3 0 0 0 0 1 1 1 1 I2 0 0 1 1 0 0 1 1 I1 0 1 0 1 0 1 0 1 Q1 0 0 1 0 0 0 0 0 Q2 0 1 0 0 0 0 0 0 Erklärungen: • Q1 leuchtet, wenn die beschalteten Eingänge der UND-Verknüpfung eins werden. Da I1 und I3 vor der UND-Verknüpfung invertiert werden leuchtet Q1 wenn • I1 = 0 ist und • I2 = 1 ist und • I3 = 0 ist. • Setzt man genau diese Kombination in die Gleichung Q1 = / I1 * I2 * / I3 ein, Q1 = /0 * 1 * /0 = 1 * 1 * 1 so erhält man Q1 = 1. • Zusammenfassung: Q1 = / I1 * I2 * / I3 Q1 wird 1 wenn I1 = 0 UND I2 = 1 UND I3 = 0 ist. • Q2 leuchtet, wenn die beschalteten Eingänge der UND-Verknüpfung eins werden. Da I2 und I3 vor der UND-Verknüpfung invertiert werden leuchtet Q2 wenn • I1 = 1 ist und • I2 = 0 ist und • I3 = 0 ist. • Setzt man genau diese Kombination in die Gleichung Q2 = I1 * / I2 * / I3 ein, Q2 = 1 * /0 * /0 = 1 * 1 * 1 so erhält man Q2 = 1. • Zusammenfassung: Q2 = I1 * / I2 * / I3 Q2 wird 1 wenn I1 = 1 UND I2 = 0 UND I3 = 0 ist. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 8 von 76 Steuerungen in der Mechatronik 2.3 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Schaltung nach Funktionsgleichung (3 Eingänge, 2 Ausgänge) Eingänge: 3 Schalter I1 bis I3 Ausgänge: 2 LEDs Q1 und Q2 Aufgaben: • Bauen Sie folgende Schaltungen mit der LOGO!-Steuerung auf: Q1 = / I1 * I2 (sprich: NICHT I1 UND I2 + I1 * I3 ODER I1 UND I3) Q2 = I1 * / I2 + / I3 • Vervollständigen Sie die Funktionstabelle • Erklären Sie in Worten, in welchen Fällen die LEDs Q1 und Q2 leuchten. Schaltung und Funktionstabellen: Erklärungen Q1 = / I1 * I2 • • + I1 * I3 I3 0 0 0 0 1 1 1 1 I2 0 0 1 1 0 0 1 1 I1 0 1 0 1 0 1 0 1 Q1 0 0 1 0 0 1 1 1 Q2 I3 0 0 0 0 1 1 1 1 I2 0 0 1 1 0 0 1 1 I1 0 1 0 1 0 1 0 1 Q1 Q2 1 1 1 1 0 1 0 0 Q1 wird 1 • wenn ( I1 = 0 UND I2 = 1) werden , I3 ist dabei gleichgültig (0 oder 1) • ODER wenn (I1 = 1 UND I3 = 1) werden, I2 ist dabei gleichgültig (0 oder 1). Weil bei beiden UND-Verknüpfungen nur 2 der 3 Eingänge angeschlossen werden, ist der Zustand des 3. Eingang gleichgültig. Dies sind jeweils 2 Zeilen in der Funktionstabelle! Erklärungen Q2 = I1 * / I2 + / I3 • Q2 wird 1 • wenn (I1 = 1 UND I2 = 0) werden, I3 ist dabei gleichgültig (0 oder 1) • ODER wenn I3 = 0 wird, I1 und I2 sind dabei gleichgültig (0 oder 1) • Bei I1 * / I2 ist der Zustand von I3 gleichgültig -> 2 Fälle in der Funktionstabelle • Bei / I3 werden I1 und I2 nicht abgefragt -> gleichgültig -> 4 Fälle in der Tabelle Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 9 von 76 Steuerungen in der Mechatronik 2.4 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Entwurf einer Schaltung aus Grundelementen: Wechselschaltung Eingänge: 2 Schalter Ausgänge: 1 Beleuchtung Aufgabe: • Wenn beide Schalter aus sind, soll die Lampe aus sein. • Wenn man einen Schalter umschaltet, soll die Lampe ihren Zustand ändern. (Ändern: Wenn die Lampe an war, soll sie aus gehen und umgekehrt). • Erstellen Sie die Funktionstabelle. I2 0 0 1 1 • I1 0 1 0 1 Q 0 1 1 0 Bauen Sie die Schaltung ausschließlich aus beliebig vielen digitalen Grundbausteinen UND, ODER, NICHT auf. Hilfestellung: Wir zerlegen das Problem in 2 Schritte: Für jede Zeile, in welcher der Ausgang 1 wird, erstellen wir zunächst eine eigene Schaltung: Fall Zeile 2: I2 0 0 1 1 I1 0 1 0 1 Q1 0 1 0 0 Je 1 Schaltung für Zeile 2 und Zeile3 Die Schaltung für den 2. Fall, in welcher der Ausgang 1 wird sieht so aus Fall Zeile 3: I2 0 0 1 1 I1 0 1 0 1 Q2 0 0 1 0 Zusammenfassen: Fall Zeile 2 oder Zeile3 tritt auf: Nun fassen wir beide Fälle zusammen: Die Lampe soll angehen, wenn der Fall Zeile 2 oder Zeile 3 eintritt: Dies ist die Lösung! abgelesene Funktionsgleichung: Q1 = (I1 * /I2) + (/I1 * I2) Steuerungstechnik-Mech2015.odt Otto Bubbers ; wobei * UND, AND; + ODER, OR ; / NICHT, NOT Seite 10 von 76 Steuerungen in der Mechatronik 2.5 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Disjunktive Normalform: eine systematische Lösungsmöglichkeit Aufgabe wie oben: Wechselschaltung I2 0 0 1 1 I1 0 1 0 1 Q1 0 1 1 0 (/ I2 * I1) (I2 * / I1) abgelesen: Q1 = (/ I2 * I1) + (I2 * / I1), dies ist exakt die Lösung aus 2.2! 2.5.1 Vorgehen beim Ablesen der Funktionsgleichung aus der Funktionstabelle • Funktionstabelle erstellen • Für jede Zeile, in der unter dem Ausgang eine 1 steht, wird eine UND-Verknüpfung aller Eingänge erstellt, dabei werden alle Eingänge invertiert, bei denen in der Zeile eine 0 steht. • Am Schluß werden alle UND-Verknüpfungen mit einem ODER zusammengefasst. 2.5.2 Schaltung nach disjunktiver Normalform Man erhält mit dieser Lösungsmethode immer eine Schaltung, die nach dem gleichen Muster aufgebaut ist. • zunächst werden die Eingänge invertiert oder nicht invertiert • dann werden die Eingänge auf UND-Verknüpfungen geführt • anschließend werden die Ausgänge der UND-Verknüpfungen mit ODER verknüpft Q1 = (/ I2 * I1) + (I2 * / I1) I2 I1 1 & ≥1 1 NICHT Q1 & UND ODER Versuchen Sie in Zukunft die Schaltungen in LOGO auch immer nach diesem "Muster" zu zeichnen. Dies erhöht die Übersicht und macht die Schaltungen verständlicher. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 11 von 76 Steuerungen in der Mechatronik 2.6 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Prüf- und Sicherheitsschaltung (Übung) Eingänge: 2 Schalter (binäre Sensoren) Ausgänge: 1 rote Anzeige-LED, grüne Anzeige-LED Aufgabe 1: • In einer sicherheitsrelevanten Steuerung werden Sensoren, die dasselbe messen, zwei- oder dreifach ausgeführt. • Hier soll überprüft werden, ob 2 Sensoren das gleiche Signal liefern. • Die grüne LED soll angehen, wenn die Sensoren das gleiche Signal liefern. • Geben Sie die Funktionstabelle, die disjunktiven Normalformen und die in LOGO aufgebaute Schaltung an. Aufgabe 2: zusätzliche Schaltung! • Die rote LED soll angehen wenn die Sensoren unterschiedliche Signale liefern. Lösung: I2 0 0 1 1 I1 0 1 0 1 rot 0 1 1 0 Steuerungstechnik-Mech2015.odt Otto Bubbers grün 1 0 0 1 grün = (/ I2 * / I1 ) + ( I2 * I1 ) rot = (/ I2 * I1 ) + ( I2 * / I1 ) (wie Aufg 2.2) einfacher: rot = / grün Denkweise: rot geht an, wenn grün aus. Seite 12 von 76 Steuerungen in der Mechatronik 2.7 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Majoritätsschaltung: 2-aus-3-Schaltung (Übung) Eingänge: 3 Schalter (binäre Sensoren) Ausgänge: 1 grüne Anzeige-LED, 1 gelbe Anzeige-LED Aufgabe: • Wenn mindestens 2 Sensoren H-Signal zeigen, leuchtet die gelbe LED. (Dies ist die Majoritätsschaltung. Majorität = Mehrheit) • Wenn alle 3 Sensoren H-Signal zeigen, leuchtet zusätzlich die grüne LED. Lösung: I3 0 0 0 0 1 1 1 1 I2 0 0 1 1 0 0 1 1 I1 0 1 0 1 0 1 0 1 Steuerungstechnik-Mech2015.odt Otto Bubbers Gelb 0 0 0 1 0 1 1 1 Grün 0 0 0 0 0 0 0 1 Gelb = (/ I3 * I2 * I1) + (I3 * / I2 * I1) + (I3 * I2 * / I1) + (I3 * I2 * I1) Grün = (I3 * I2 * I1) Seite 13 von 76 Steuerungen in der Mechatronik 2.8 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Schaltungsvereinfachung Durch Überlegung erkennt man, dass sich die Majoritätsschaltung auch mit UNDVerknüpfungen aufbauen lässt, die nur 2 Eingänge besitzen: Q = (I2 * I1) + (I3 * I1) + (I3 * I2) Ursprüngliche Schaltung (disjunktive Normalform) I3 I1 I2 1 1 1 Vereinfachte Schaltung I3 I2 I1 & & & ≥1 Q & & ≥1 Q & & Es muss demnach eine systematische Möglichkeit geben, die Schaltung zu vereinfachen. Erklärung, warum sich diese Schaltung vereinfachen lässt: Vorgehen: 1) Evtentuell erweitern, 2) vereinfachen durch Zusammenfassung: Gelb = (/I3 * I2 * I1) + (I3 * /I2 * I1) + (I3 * I2 * /I1) + (I3 * I2 * I1) Gelb = (/I3 * I2 * I1) + (I3 * /I2 * I1) + (I3 * I2 * /I1) + (I3 * I2 * I1) + (I3 * I2 * I1) + (I3 * I2 * I1) Gelb = (I2 * I1) + (I3 * I1) + (I3 * I2 ) Prinzip der Vereinfachung: unterscheiden sich 2 Terme nur durch eine Variable, so kann man sie zusammenfassen: z.B. (/I3 * I2 * I1) + (I3 * I2 * I1) unterscheiden sich nur durch I3 Bei der Zusammenfassung wird daraus (I2 * I1) Regeln: y = (a * b) lässt sich erweitern zu y = (a * b) + (a * b) + (a * b) usw. y = (a * b) + (a * /b) lässt sich vereinfachen zu y = a y = (a * b * c) + (a * b * /c) lässt sich verienfachen zu y = (a * b) Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 14 von 76 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Steuerungen in der Mechatronik 2.9 Schaltungsvereinfachung mit dem KV-Diagramm 2.9.1 2 Eingänge Nr 0 1 2 3 b 0 0 1 1 a 0 1 0 1 Q 3 2 1 0 2.9.2 3 Eingänge Nr 0 1 2 3 4 5 6 7 c 0 0 0 0 1 1 1 1 b 0 0 1 1 0 0 1 1 a 0 1 0 1 0 1 0 1 Q 3 7 6 2 1 5 4 0 2.9.3 4 Eingänge Nr 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 2.10 • • • • • • • • • d 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 c 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1 b 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 a 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 Q Regeln zur Vereinfachung mit dem KV-Diagramm 3 7 6 2 11 15 14 10 9 13 12 8 1 5 4 0 I1 I2 3 7 6 2 11 15 14 10 9 13 12 8 1 5 0 4 I4 I3 Das KV-Diagramm hat so viele Felder wie Zeilen in der Funktionstabelle. Für jeden Ausgang ein KV-Diagramm verwenden. Nummerierung darf nur verwendet werden, wenn die Reihenfolge der Eingänge (I4,I3,I2,I1) in der Funktionstabelle mit der Beschriftung des KV-Diagramms übereinstimmen (oberhalb links I1, linke Seite oben I2, unten Mitte I3, rechts Mitte I4). Zusammengefasste Blöcke bestehen aus 1,2,4,8,... Einsen. Je größer der Block ist, desto größer ist die Vereinfachung. Die Blöcke müssen symmetrisch zu eingezeichneten Linien des KV-Diagramms sein. Jede Eins muss mindestens einmal berücksichtigt werden, dürfen aber in mehreren Blöcken vorkommen. Innerhalb eines Block steht UND • Die Blöcke werden ODER-verknüpft +. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 15 von 76 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Steuerungen in der Mechatronik 2.11 Übungen Schaltungsvereinfachung a b 1 a 1 1 1 b 1 1 1 1 c c a a b 1 1 1 1 1 1 1 b d 1 1 1 1 1 1 1 1 1 1 1 c c a b d a 1 1 1 1 1 1 1 1 1 c Steuerungstechnik-Mech2015.odt Otto Bubbers 1 b d 1 1 1 1 1 1 1 1 1 1 d c Seite 16 von 76 Steuerungen in der Mechatronik 2.12 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Leuchtpunktanzeige (Übung) Mit drei Meldern (A, B, C) wird die Konzentration an Schadstoffen gemessen. Es ist eine Leuchtpunkt-Anzeige nach folgendem Muster zu entwerfen: • Wenn genau ein Melder H-Signal zeigt, geht Lampe L1 an. • Wenn genau zwei Melder H-Signal zeigen, geht Lampe L2 an. • Wenn genau drei Melder H-Signal zeigen, geht Lampe L3 an. E1 L3 E2 L2 Logik L1 E3 Leuchtpunkt-Anzeige 3 Melder Lösung: E3 0 0 0 0 1 1 1 1 E2 0 0 1 1 0 0 1 1 E1 0 1 0 1 0 1 0 1 L1 L2 L3 1 1 1 1 1 1 1 abgelesen aus Funktionstabelle: L1 = (/E3 * /E2 * E1) + (/E3 * E2 * /E1) + (E3 * /E2 * /E1) L2 = (/E3 * E2 * E1) + (E3 * /E2 * E1) + (E3 * E2 * /E1) L3 = (E3 * E2 * E1) mithilfe der Gleichungen die nebenstehende Schaltung aufgebaut: Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 17 von 76 Steuerungen in der Mechatronik 2.13 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Leuchtbandanzeige, "Thermometercode" (Übung) Mit drei Meldern (A, B, C) wird die Konzentration an Schadstoffen gemessen. Es ist eine Leuchtband-Anzeige nach folgendem Muster zu entwerfen: • Wenn mindestens ein Melder H-Signal zeigt, geht Lampe L1 an. • Wenn mindestens zwei Melder H-Signal zeigen, geht zusätzlich L2 an. • Wenn mindestens drei Melder H-Signal zeigen, geht zusätzlich L3 an. • Wenn alle Melder H-Signal zeigen, gehen alle Lampen an. E1 L3 E2 L2 Logik L1 E3 Leuchtpunkt-Anzeige 3 Melder Lösung: E3 0 0 0 0 1 1 1 1 E2 0 0 1 1 0 0 1 1 E1 0 1 0 1 0 1 0 1 L1 1 1 1 1 1 1 1 L2 L3 1 1 1 1 1 L1 = E1 + E2 + E3 L2 = (E1 * E2) + (E1 * E3) + (E2 * E3) Gleiche Schaltung wie bei Majoritätsschaltung, 2-aus-3-Schaltung! L3 = E1 * E2 * E3 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 18 von 76 Steuerungen in der Mechatronik 2.14 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Teichbefüllungssteuerung (Übung) Als Amphibienfreunde wollen wir das Überleben der Frösche im Gartenteich sichern und entwickeln eine Steuerung zur Befüllung eines Froschteiches mit zwei Pumpen. Pumpe P1 Pumpe P2 Sensor C Sensor B Sensor A Die Sensoren liefern 1 Signal wenn das Wasser sie erreicht bzw. 0 Signal, wenn kein Wasser am Sensor ist. • Befindet sich der Wasserstand unterhalb des Sensors A, dann müssen beide Pumpen laufen. • Befindet sich der Wasserstand zwischen den Sensoren A und B darf nur Pumpe 1 laufen. • Befindet sich der Wasserstand zwischen den Sensoren B und C darf nur Pumpe 2 laufen. • Erreicht der Wasserstand den Sensor C oder höher darf keine der Pumpen in Betrieb sein. • Wenn die Sensoren einen Zustand melden, der nicht möglich ist ("schwebendes Wasser"), gehen beide Pumpen aus und ein Warnsignal ertönt. Eingänge: C, B, A Ausgänge: P1, P2, W Lösung: C 0 0 0 0 1 1 1 1 B 0 0 1 1 0 0 1 1 A 0 1 0 1 0 1 0 1 P1 1 1 P2 1 W 1 1 1 1 1 P1 = (/C * /B) vereinfacht von P1 = (/C * /B * A) + (/C * /B * /A) P2 = (/C * /B * /A) + (/C * B * A) W = (B * /A) + (C * /B) vereinfacht von W = (/C * B * /A) + (C * B * /A) + (C * /B * A) + (C * /B * /A) Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 19 von 76 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Steuerungen in der Mechatronik 2.15 Zahlensysteme 2.15.1 Dezimalzahl Zahlenvorrat: Ziffern 0 bis 9 Basis: 10 → 10 Ziffern Wertigkeit Dezimalzahl 1000 103 100 102 10 101 1 100 2 0 4 8 Bedeutet: 2 * 1000 + 0 * 100 + 4 * 10 + 8 *1 2.15.2 Dualzahl (binär) und Umwandlung von Dual- in Dezimalzahl Zahlenvorrat: Ziffern 0 und 1 Basis: 2 → 2 Ziffern Wertigkeit 128 27 64 26 32 25 16 24 8 23 4 22 2 21 1 20 Dualzahl 1 1 0 0 1 0 1 1 Bedeutet: 1*128 + 1*64 + 0*32 + 0*16 + 1*8 + 0*4 + 1*2 +1*1 = 203dez Beispiel Dualzahl: mov p1,#10000000b 2.15.3 Umwandlung von Dezimal- in Dualzahl 203dez = ?dual Wertigkeit 128 27 64 26 32 25 16 24 8 23 4 22 2 21 1 20 Dualzahl ? ? ? ? ? ? ? ? X X 203 -128 ↓ 75 -64 ↓ 11 -8 ↓ 3 X -2 ↓ 1 -1 ↓ 0 Wertigkeit 128 27 64 26 32 25 16 24 8 23 4 22 2 21 1 20 Dualzahl 1 1 0 0 1 0 1 1 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 20 von 76 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Steuerungen in der Mechatronik 2.15.4 Hexadezimal (Sedezimal) Zahlenvorrat: Ziffern 0 bis 9, A bis F Basis: 16 → 16 Ziffern Wertigkeit Dezimalzahl 4096 163 256 162 16 161 1 160 1 0 A F Bedeutet: 1 * 4096 + 0 * 256 + A * 16 + F 1 = 1 * 4096 + 10 * 16 + 15 * 1 = 4271dez 2.15.5 Umwandlung Dualzahl → Hexadezimalzahl Dezimal Wertigkeit 203 umgewandelt in Dualzahl: 128 64 32 16 8 4 2 1 Dualzahl 1 1 0 0 1 0 1 1 Wertigkeit für Umwandlung in Hexadezimalzahl 8 4 2 1 8 4 2 1 Hexadezimalzahl C B Wertigkeit Hexzahl 16 1 2.15.6 Umwandlung Hexadezimalzahl in Dezimalzahl CBhex = C * 16 + B * 1 = 12 * 16 + 11 * 1 = 203dez Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 21 von 76 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Steuerungen in der Mechatronik 2.16 Windrichtungsanzeige für Windkraftanlage (Übung) D1 D2 D4 Steuerung N S W O Windrichtungs- Dualzahl Erfassung WindrichtungsAnzeige Dualzahl Anzeige Dezimalzahl Himmelsrichtung D4 D2 D1 N O S 0 N 0 0 0 1 1 NO 0 0 1 1 2 O 0 1 0 1 3 SO 0 1 1 1 4 S 1 0 0 1 5 SW 1 0 1 1 6 W 1 1 0 7 NW 1 1 1 W 1 1 1 1 1 1 Die Ansteuerung einer Windrichtungsanzeige für eine Windkraftanlage wird entworfen. Ein Sensor erfasst 8 verschiedene Positionen und liefert auf 3 Leitungen die als Dualzahl kodierte Himmelsrichtung. Wir legen fest: Norden = 0, Nordosten = 1, Osten = 2 usw. Bei der Anzeige sind die Leuchtschriften für N und S sowie W und O transparent hintereinander angebracht. Man sieht immer nur N oder S bzw. W oder O leuchten. Entwerfen Sie die Steuerung. Anleitung: Geben Sie zunächst die disjunktiven Normalformen an und vereinfachen Sie dann die Gleichungen bevor Sie die Schaltungen in LOGO eingeben. Alternativ können Sie die Vereinfachungen auch aus der Funktionstabelle entnehmen. 2.16.1 Lösung N = (/D4 * /D2) + (D4 * D2 * D1) Dies ist bereits die vereinfachte Gleichung, ablesen aus der Funktionstabelle: Die Gleichung für die unter N stehenden Einsen (Zeilen 0 und 1) kann man zusammenfassen, weil in beiden Zeilen unter D4 und D2 das Gleiche steht. Wenn man beide Zeilen einzeln abliest, ergibt sich: (/D4 * /D2 * D1) + (/D4 * /D2 * /D1) . Auch hier sieht man, dass sich die Terme zusammenfassen lassen. Für O sind zwei Vereinfachungen möglich: Zeilen 1 und 3 sowie Zeilen 2 und 3 lassen sich jeweils zusammenfassen, man erhält: O = (/D4 * D1) + (/D4 * D2 ) Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 22 von 76 Steuerungen in der Mechatronik Carl-Engler-Schule Karlsruhe Technisches Gymnasium Durch Ablesen der disjunktiven Normalform (jede Zeile mit 1 einzeln) erhält man: O = (/D4 * /D2 * D1) + (/D4 * D2 * /D1) + (/D4 * D2 * D1) Bevor man 2x 2 Terme zusammenfassen kann, muss man erst den Term, den man 2x braucht "verdoppeln": Erweitert: O = (/D4 * /D2 * D1) + (/D4 * D2 * /D1) + (/D4 * D2 * D1) + (/D4 * D2 * D1) Nun kann man die Vereinfachung durchführen: O = (/D4 * D1) + (/D4 * D2 ) S = (D4 * /D2) + (/D4 * D2 * D1) , dabei war eine Vereinfachung möglich. W = (D4 * D1) + (D4 * D2), dabei waren wieder 2 Vereinfachungen möglich. 2.16.2 Schaltung Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 23 von 76 Steuerungen in der Mechatronik 2.17 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Sturmsicherung für eine Windkraftanlage (Übung) Ein Windgeschwindigkeitsmesser liefert die Windstärke in Beauford (0-12) kodiert als Dualzahl. Ab Windstärke 10 soll die Sturmsicherung ansprechen. Bei Windstärke 8 und 9 soll eine gelbe Warnleuchte an gehen. Entwerfen Sie beide Schaltungen. Anleitung: Erstellen Sie eine Funktionstabelle, dann die disjunktiven Normalformen. Vereinfachen Sie dann die Gleichungen oder lesen Sie aus der Funktionstabelle gleich die vereinfachten Gleichungen ab. dez D8 D4 D2 D1 0 0 0 0 0 1 0 0 0 1 2 0 0 1 0 3 0 0 1 1 4 0 1 0 0 5 0 1 0 1 6 0 1 1 0 7 0 1 1 1 8 1 0 0 0 Sturm Warn 1 9 1 0 0 1 10 1 0 1 0 1 1 11 1 0 1 1 1 12 1 1 0 0 1 13 1 1 0 1 1 14 1 1 1 0 1 15 1 1 1 1 1 Sturm = (D8 * D4) + (D8 * D2) Warn = (D8 * /D4 * /D2) Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 24 von 76 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Steuerungen in der Mechatronik 3 Umsetzung von analogen in digitale Signale und umgekehrt 3.1 Digital-Analog-Umsetzer Häufig verwendete Abkürzungen: DAU oder DAC (digital-analog-converter) An den Eingang des DAU legt man eine Dualzahl an, am Ausgang erhält eine entsprechende analoge Spannung. 3.1.1 Beispiel 4-Bit-Digital-Analog-Umsetzer Zur einfachen Erklärung der Wirkungsweise wird der DAU mit einer Versorgungsspannung von 16V versorgt. Der Ausgang kann dann eine Spannung im Bereich von 0 bis 16V ausgeben. Mit 4 digitalen Eingängen lassen sich 24 = 16 verschiedene Zahlen darstellen. Man erhält die in der Tabelle aufgeführten Zuordnungen zwischen Dualzahl, Dezimalzahl und Spannung. 16V D8 D D4 D2 D1 Digitale Eingänge A Analoger Ausgang Dualzahl (digital) Analogwert D8 D4 D2 D1 dezimal U in V 0 0 0 0 0 0 0 0 0 1 1 1 0 0 1 0 2 2 0 0 1 1 3 3 0 1 0 0 4 4 0 1 0 1 5 5 0 1 1 0 6 6 0 1 1 1 7 7 1 0 0 0 8 8 1 0 0 1 9 9 1 0 1 0 10 10 1 0 1 1 11 11 1 1 0 0 12 12 1 1 0 1 13 13 1 1 1 0 14 14 1 1 1 1 15 15 Wenn man an den DAU nacheinander die Dualzahlen 0000 bis 1111 anlegt uns sich die zugehörigen analogen Spannungen am Ausgang ansieht, erhält man den dargestellten Verlauf. Folgendes fällt auf: • Mit dem 4-Bit-Umsetzer lassen sich nur analoge Spannungen in 1VSchritten erzeugen, Zwischenwerte sind nicht möglich. • Der "Endwert" 16V wird nicht erreicht, die maximal mögliche Spannung ist 15V, also 1 Stufe weniger als der "Endwert". Die Auflösung dieses Umsetzers beträgt: Spannungsbereich 16V 16V = 4 = =1V Anzahl der Zahlen 16 2 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 25 von 76 Steuerungen in der Mechatronik Carl-Engler-Schule Karlsruhe Technisches Gymnasium 3.1.2 Verschiedene Auflösungen im Vergleich Jedes hinzukommende Bit am Eingang des Digital-Analog-Umsetzers verdoppelt die Anzahl der Stufen und verbessert damit die Auflösung. 4-Bit-DAU Spannungsbereich 16V 16V = 4 = =1V Anzahl der Zahlen 16 2 5-Bit-DAU 16V 16V =0,5 V 5 = 32 2 6-Bit-DAU 16V 16V =0,25V 6 = 64 2 1 Stufe = 1V 1 Stufe = 0,5V 1 Stufe = 0,25V 8-Bit-DAU 12-Bit-DAU 16-Bit-DAU 16V 16V =0,0625 V 8 = 256 2 1 Stufe = 62,5mV 16V 16V =3,9 mV 12 = 4096 2 1 Stufe = 3,9mV 16V 16V =0,25 V 6 = 65536 2 1 Stufe = 0,244mV 3.1.3 Aufgabe: 16-Bit-DAU arbeitet mit 0 bis 10V Berechnung der Auflösung: 3.1.4 Aufgabe: 16-Bit-DAU arbeitet mit -10V bis 10V Berechnung der Auflösung: Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 26 von 76 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Steuerungen in der Mechatronik 3.2 Analog-Digital-Umsetzer Häufig verwendete Abkürzungen: ADU oder ADC (analog-digital-converter) Ein Analog-Digital-Umsetzer liefert immer "nach Aufforderung" einen neuen Digitalwert, Sample genannt. Diese Aufforderung erfolgt durch ein Taktsignal. Bei einem Taktsignal von 40kHz fallen also 40.000 Samples pro Sekunde an. Beispiel 1: Blockschaltbild eines 8-Bit-Analog-Digital-Umsetzers mit 10V Spannungsversorgung und einer Samplingrate von 40.000 Samples pro Sekunde. Takt = Samplingrate = 40kHz Ubatt=10V A Dieser ADU liefert 40.000 Digitalwerte pro Sekunde mit einer Auflösung von Spannungsbereich 10V 10V = 8 = =39mV Anzahl der Zahlen 256 2 D Analoger Eingang Digitale Ausgänge Beispiel 2: ADU für CD-Qualität mit 16Bit (=2Byte) und einer Samplingrate von 44,1kHz. Bei einem Stereo-Signal fallen also 44.100 * 2 Byte * 2 Kanäle = 176.400 Bytes Informationen pro Sekunde an, entspricht einem "Bitstrom" von 1,4112 MBit/s. 3.2.1 Aufgabe: PT1000 am Messeingang für Widerstände des myDAQ Der ADU im myDAQ abeitet mit 16 Bit. Der Widerstandsmessbereich beträgt 0 bis 20MΩ. Bei 0°C hat der PT1000 einen Widerstandswert von R0=1000Ω, bei 100°C beträgt R100=1385Ω. Berechnung der Auflösung in Ω und °C: Auflösung= Wertebereich 20MΩ 20MΩ = = =305,18 Ω 16 Anzahl der Zahlen 65536 2 385Ω ≙ 100° -> Auflösung : 78°C 1Ω ≙ 0,2597° Man muss den Messbereich also unbedingt einschränken, wenn man bei Zimmertemperatur misst: Messbereich 0 bis 20kΩ: Auflösung= Wertebereich 20k Ω 20k Ω = 16 = =0,30518 Ω=0,078°C Anzahl der Zahlen 65536 2 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 27 von 76 Steuerungen in der Mechatronik 3.3 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Komparator (Schwellwertschalter) ohne Hysterese Komparator bedeutet Vergleicher. Dieses Bauteil vergleicht einen analogen Wert mit einem Vergleichswert und zeigt an seinem Ausgang durch ein digitales High oder Low an, ob der Wert größer oder kleiner als der Vergleichswert ist. Folgende Schaltzeichen sind gebräuchlich: comp Bei den Symbolen mit 2 Eingängen schließt man auch den Vergleichswert am Bauteil an, wenn nur ein Eingang dargestellt ist, ist der Vergleichswert fest. Der Vergleichswert wird auch Schaltschwelle genannt. Spannung Schaltschwelle Vergleichswert Ausgang Q t t 3.4 Komparator (Schwellwertschalter) mit Hysterese (Schmitt-Trigger) Ein Komparator besitzt oft 2 Schaltschwellen, der Abstand der Schaltschwellen wird Hysterese genannt. Die Hysterese wird in Volt, Grad oä. angegeben. Folgende Schaltzeichen sind gebräuchlich: Abstand der Schaltschwelle n = Hysterese Spannung Obere Schaltschwelle Untere Schaltschwelle t Ausgang Q t Arbeitsweise: • Wenn die obere Schaltschwelle überschritten wird, ist der Ausgang Q high. • Wenn die untere Schaltschwelle unterschritten wird, ist der Ausgang Q low. • Wenn die Spannung zwischen den Schaltschwellen liegt, bleibt der Ausgang wie er zuvor war, der Zustand wird "gespeichert". Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 28 von 76 Steuerungen in der Mechatronik 3.5 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Analoger Schwellwertschalter (Komparator) in LOGO Logo setzt den analogen Spannungswert an den Eingängen AI1 bis AI4 im Bereich von 0 bis 10V in einen internen Rechenwert 0 bis 1000 um. Wir lassen zunächst Gain = 1,0 Spannung in V interner sowie Offset = 0 und den Rechenwert Messbereich 0 bis 1000. 0 0 Mit diesen Einstellungen kann 0,1 10 man später Eingangsgrößen 1 100 einem bestimmten 5 500 Wertebereich zuweisen. Wenn Gain = 1,0 und 7,5 750 Offset = 0 ist, gelten 8,37 837 nebenstehende 10 1000 Zuordnungsbeispiele. Der analoge Schwellwertschalter ist in Logo ein Komparator mit 2 Schaltschwellen. Die Schaltschwellen heißen ON und OFF und können getrennt eingegeben werden. Benötigt man einen Schwellwertschalter mit einer Schaltschwelle, so gibt man für beide Schaltschwellen den gleichen Wert ein. 3.5.1 Schaltschwelle ON > Schaltschwelle OFF Q = 1 falls Ax > ON Q = 0 falls Ax <= OFF Q bleibt falls OFF<=Ax<ON Ax ON OFF Q 3.5.2 Schaltschwelle ON < Schaltschwelle OFF (Fensterkomparator) Ax Q=1 falls Ax zwischen ON und OFF OFF ON Q Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 29 von 76 Steuerungen in der Mechatronik Carl-Engler-Schule Karlsruhe Technisches Gymnasium 3.5.3 Testprogramm • • • Schalter AI1 / I7 auf A (Analogeingang = Poti nutzen) Schaltschwellen: • ON (Ein): 600 • OFF (Aus): 400 Meldetext mit Erklärungen und Anzeige des augenblicklich eingestellten Analogwerts. 3.5.4 Einstellungen Schwellwertschalter und Meldetext 3.5.5 Beobachtungen der Funktionsweise: • • • Erhöht man den Wert von 0 an, so geht die LED an, sobald der Wert 600 überschreitet. Erniedrigt man den Wert von > 600 so geht die LED erst aus, wenn man 400 unterschreitet. Im Bereich zwischen 400 und 600 bleibt der zuletzt ausgegebene Zustand erhalten. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 30 von 76 Steuerungen in der Mechatronik 3.6 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Analoger Schadstoffmelder (Übung) Die Schadstoffkonzentration wird von einem Sensor mit einer Spannung von 0 bis 10V gemeldet. • Wenn die Spannung kleiner als 4V beträgt, ist die Schadstoffkonzentration gering und die grüne LED leuchtet. • Ist die Spannung größer als 4V, ist die Konzentration bedenklich und die rote LED leuchtet. • Auf dem Logo-Display soll die Konzentration von 0 bis 1000 und einer der Texte Schadstoffe gering oder Schadstoffe bedenklich erscheinen. 3.6.1 Simulation Wert größer 400 • • rote LED leuchtet und der Meldetext "bedenklich" erscheint. Wenn man Merker 25 an High anschließt, leuchtet die LCD-Hintergrundbeleuchtung dauern. Würde man M25 an den Meldetext "bedenklich" anschließen, würde Beleuchtung nur angehen, wenn der Schadstoffwert größer als 400 ist. 3.6.2 Simulation Wert kleiner als 400 • grüne LED leuchtet und Meldetext "gering" erscheint. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 31 von 76 Steuerungen in der Mechatronik 3.7 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Schadstoffkonzentrationsanzeige mit 3 Stufen (Übung) Die Schadstoffkonzentration wird von einem Sensor mit einer Spannung von 0 bis 10V gemeldet. • Wenn die Spannung kleiner oder gleich 4V ist, herrscht ein geringe Schadstoffkonzentration und die grüne LED leuchtet. • Liegt die Spannung zwischen 4 und 6V, ist die Konzentration mittel und die gelbe LED leuchtet. • Überschreitet die Spannung 6V, so ist die Konzentration hoch und die rote LED leuchtet. • Auf dem Logo-Display soll die Konzentration von 0 bis 1000 als Zahl und als Balkenanzeige erscheinen sowie einer der Texte Schadstoffe geringe Belastung / mittlere Belastung / Gefahr angezeigt werden. 3.7.1 Simulation bei mittlerer Belastung • • • Schaltschwellen des mittleren Schwellwertschalters beachten! (sonst leuchten bei 400 bzw. 600 jeweils 2 LEDs) Nun aber Gefahr der Schwingungsneigung wenn auf der realen LOGO genau 400 oder 600 eingestellt wird. (Relais geht dauern an und aus, dies ist durch ein Rattern hörbar.) Untere Zeile des Meldetexts als Ticker (Laufschrift) Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 32 von 76 Steuerungen in der Mechatronik 3.8 Carl-Engler-Schule Karlsruhe Technisches Gymnasium 2-Bit-Analog-Digital-Umsetzer aufgebaut aus 4 Schwellwertschaltern Takt = Samplingrate wird bestimmt durch die Programmlaufzeit Ubatt=10V A Q2 2-Bit-Dualzahl D Analoger Eingang Q1 Digitale Ausgänge Am Eingang AI1 ist ein Poti angeschlossen, mit dem man Spannungen zwischen 0 un 10 V einstellen kann. Wir bilden einen 2-Bit-Analog-Digital-Umsetzer nach mit folgenden Eigenschaften. Bei Eingangsspannung zwischen 0 und 1V wird an den Ausgängen die Dualzahl 00 dargestellt. Spannungen zwischen 1V und 2V bedeuten Dualzahl 01 usw. bis zur Dualzahl 11. Beachten Sie die eindeutige Zuordnung an den Bereichsgrenzen! Bedeutet 1V Dualzahl 00 oder 01? Q2 0 0 1 1 Q1 0 1 0 1 Spannung zwischen 0 und 0,99 1 und 1,99 2 und 2,99 3 und 3,99 In den folgenden 2 Lösungen wurden in der Simulation 2,99V eingestellt → Zahl 2 Schwellwertschalter mit je einer Schaltschwelle bei 1V, 2V, 3V, 4V Schwellwertschalter mit je zwei Schaltschwelle bei 0V/1V, 1V/2V, 2V/3V, 3V/4V Beide obere Komparatoren melden 1 Nur der Komparator mit den Schwellen 2,00 und 3,00 meldet 1 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 33 von 76 Steuerungen in der Mechatronik 3.9 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Pumpensteuerung für thermische Solaranlage (Übung) Die Warmwassererwärmung wird durch eine thermische Solaranlage unterstützt. Von den Sonnenkollektoren auf dem Dach soll dann Wasser in den Warmwasserspeicher im Keller gepumpt werden, wenn die Temperaturdifferenz zwischen Sonnenkollektoren und Warmwasserspeicher 15°C beträgt. Betriebsmittel: • 2 Temperatursensoren: 0 - 10V entspricht 0 - 100°C • Pumpe • Schalter Unterstützung Warmwasser durch Solaranlage An / Aus Anleitung: Der LOGO-Funktionsbaustein "Analogkomparator" besitzt 2 analoge Eingänge, deren Differenzwert den Ausgang steuert. 3.10 Jalousiesteuerung (Übung) Die Jalousien der Carl-Engler-Schule sollen dann heruntergefahren werden (Ausgang Q1=1; Q2=0), wenn der analoge Sonnensensor eine Spannung von mehr als 8V abgibt. Bei einer Spannung von 3V wird sie wieder hochgefahren (Ausgang Q1=0; Q2 = 1). (Hinweis: Die Jalousie hat Endschalter, die beim Herunter- oder Hochfahren die Jalousie automatisch stoppen, wenn die Endstellung erreicht ist.) Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 34 von 76 Steuerungen in der Mechatronik 3.11 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Temperaturmessung mit PT1000 und Messverstärker (Übung) Der Messverstärker liefert Spannungen von 0V bis 10V, was Temperaturen von -30°C bis +70°C entsprechen. Der Messverstärker benötigt eine Versorgungsspannung zwischen 12V und 24V. 3.11.1 Anschluss: 24V PT1000 Messverstärker ϑ↑↑ 0..10V 0V 24V-Buchse AIN3-Buchse (I1) 0V-Buchse LOGO Schiebeschalter 1 auf 24V (Ain) 3.11.2 Verarbeitung der Zahlenwerte: 10V 1000 +70°C 0°C 700 +70.0°C 0.0°C 3V 300 0V 0 0 Logo-interne Zuordnung -300 Offset -300 -30°C Messverstärker -30.0°C Anzeige mit 1 Dezimalstelle 3.11.3 Programm Temperaturanzeige und Heizungssteuerung Damit Logo ein Sinn in der Schaltung sieht, wird ein Ausgang benötigt, hier die Heizung. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 35 von 76 Steuerungen in der Mechatronik 3.12 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Heizungsregelung mit 2-Punkt-Regler (Übung) Als Heizung dient eine Halogenlampe. Unter der Lampe ist der Temperatursensor angebracht, der durch die Heizung erwärmt wird. Die Lampe erhält ihre Energie von einem 12V-Netzteil und wird mit einem MOSFET ein- und ausgeschaltet. Der 5V-Ausgang der LOGO-Platine kann den MOSFET direkt ansteuern. 24V PT1000 ϑ↑↑ Mess0..10V verstärker 0V 12V LOGO-Steuerung AIN3-Buchse (I1) GND-Buchse Schiebeschalter 1 auf 24V (Ain) G Q1 out_5V 12V GND Wenn Ein- und Ausschalten bei der gleichen Spannung (Temperatur) erfolgt, hört man wie das Relais oft schnell ein- und ausschaltet. Dies zerstört das Relais auf Dauer und der schadet der Heizung. Daher unterscheiden sich Ein- und Ausschaltpunkt, hier um 0,2°C (also 0,02V). Man spricht von einer Hysterese von 0,2°C. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 36 von 76 Steuerungen in der Mechatronik 3.13 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Heizungs-Zweipunktregeler mit Temperaturvorwahl am Poti Die gewünschte Temperatur kann mit einem Potenziometer, das an AIN4 angeschlossen ist, vorgewählt werden. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 37 von 76 Steuerungen in der Mechatronik 3.14 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Fernschalten der Heizung mit dem Smartphone (Übung) Die Heizungsanlage kann über die Taster I3 oder über das Smartphone F1 eingeschaltet und über I4 bzw F2 ausgeschaltet werden. Achtung bei Verwendung in der Schule: Je nach verwendetem Smartphone-Browser muss die LOGO-IPAdresse ohne http:// aufgerufen werden. Rechts oben: Anlage aus, keine Regelung der Heizungs Rechts Mitte: Anlage wurde mit F1 eingeschaltet. Die Anlage heizt, weil der Sollwert kleiner als der Istwert ist. Rechts Mitte: Anlage eingeschaltet. Die Anlage heizt nicht, weil der Istwert größer als der Sollwert ist. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 38 von 76 Steuerungen in der Mechatronik Carl-Engler-Schule Karlsruhe Technisches Gymnasium 4 Speichern von Informationen 4.1 Erklärung des Begriffs Speichern am Beispiel Fahrstuhlanforderung Ich teile dem Fahrstuhl mit, dass er kommen soll durch Drücken des Tasters. Der Fahrstuhl teilt mir mit, dass er sich die Anforderung gemerkt hat, indem die Lampe im Taster leuchtet. Neu: Die Lampe leuchtet, auch wenn ich den Taster loslasse! Dies funktioniert, weil meine Anforderung in einem Flipflop gespeichert wurde. Sobald der Fahrstuhl da ist, setzt ein Kontakt im Fahrstuhlschacht das Fipflop zurück, die Lampe erlischt. 4.2 RS-Flipflop 4.2.1 Schaltzeichen / einfache Funktionstabelle / Ablaufdiagramm Q S R S R Q Zustand 0 0 Q speichern 0 1 0 rücksetzen 1 0 1 setzen 1 1 0 rücksetzdominant S R Q 4.2.2 Begriffe Setzen (set): den Ausgang auf 1 bringen Rücksetzen (reset): den Ausgang auf 0 bringen Rücksetzdominant: Rücksetzen hat Vorrang vor Setzen; bei S=R=1 wird rückgesetzt Highaktiv: die Eingänge reagieren auf 1 4.3 RS-Flipflop aus Grundgattern 4.3.1 erweiterte Funktionstabelle und abgelesene Funktionsgleichung Zum Schaltungsentwurf muss man die Funktionstabelle erweitern: Links steht der Zustand von Q vor der Tastterbetätigung, rechts nach der Tasterbetätigung Qvor S R Qnach Zustand 0 0 0 0 speichern 0 0 1 0 rücksetzen 0 1 0 1 setzen 0 1 1 0 rücksetzdominant 1 0 0 1 speichern 1 0 1 0 rücksetzen 1 1 0 1 setzen 1 1 1 0 rücksetzdominant Steuerungstechnik-Mech2015.odt Otto Bubbers Q = (S * /R) + ( Q * /R) /R ausklammern: Q = /R * (S + Q) Seite 39 von 76 Steuerungen in der Mechatronik 4.3.2 Schaltung Q = /R * (S + Q) R 1 S Carl-Engler-Schule Karlsruhe Technisches Gymnasium & Q ≥1 4.3.3 Wie funktioniert das Speichern? 4.4 Durch Setzen=1 wird der Ausgang zu 1 Wenn anschließend Setzen=0 wird, bleibt durch die Rückführung von Q=1 auf das ODER am Setzeingang dieser Zustand gespeichert. Durch Rücksetzen=1 wird der Ausgang 0 Auch dieser Zustand bleibt erhalten, wenn Rücksetzen wieder 0 wird. Funktionsbaustein RS-Flipflop Der Baustein heißt in Logo Selbsthalterelais und hat die Funktions eines Rücksetzdominaten RS-Flipflops. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 40 von 76 Steuerungen in der Mechatronik 4.5 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Selektive Bandweiche Auf einem Transportband werden lange und kurze Werkstücke in beliebiger Reihenfolge transportiert. Die Bandweiche soll so gesteuert werden, dass die ankommenden Teile nach ihrer Länge getrennten Abgabestationen zugeführt werden. Die Länge der Teile wird über eine Abtastvorrichtung ermittelt (Rollenhebel): Durchläuft ein langes Teil die Abtastvorrichtung, sind kurzzeitig alle drei Rollenhebel betätigt. Durchläuft ein kurzes Teil die Abtastvorrichtung, wird kurzzeitig nur der mittlere Rollenhebel betätigt. Bewegt wir die Bandweiche durch einen pneumatischen Zylinder, der von einem 5/2-Wegeventil mit elektromagnetischer Betätigung und Rückstellfeder angesteuert wird. Ist der Elektromagnet M1 des Ventils stromdurchflossen, fährt der Kolben des Zylinder aus. Funktionsplan [Ergänze die logische Schaltung für den Setz- und Rücksetzbefehl, teste evtl. die Funktion in LOGO! (das Betätigte Magnetventil M1 entspricht dann der Lampe)] S Q R Bildquelle: Wellenreuther, G.& Zastrow, D. (2011): Automatisieren mit SPS – Theorie und Praxis, Vieweg+Teubner, Wiesbaden, S. 103 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 41 von 76 Steuerungen in der Mechatronik 4.6 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Milchanlage Eine Milchanlage besteht aus zwei Tanks: Der linke, große ist der Sammelbehälter, in dem die Milch zunächst gesammelt wird. Der rechte Behälter dient dazu, die Milch im Hofladen des Bauernhofes abzufüllen. Dazu wird die Milch aus dem Sammelbehälter mit Hilfe einer Pumpe in den Versorgungsbehälters des Hofladens gepumpt. Für die Steuerung sind die folgenden Bedingungen zu beachten: 1. Die Pumpe darf nicht laufen, wenn der Sammelbehälter leer ist. Der Füllstand des Sammelbehälters wird dabei über den Schwimmschalter S1 überwacht (S1 = 0 bedeutet, dass der Tank leer ist). 2. Die Pumpe darf nur dann anlaufen, wenn der Mindestfüllstand des Versorgungsbehälters unterschritten (S2 = 0) wird. Ist dies der Fall, wird der Behälter sofort auf die maximale Füllhöhe aufgefüllt (S3 = 1). Sinkt der Milchpegel danach unter die maximale Füllhöhe ab, bleibt die Pumpe vorerst abgeschaltet (P = 0). 3. Die Pumpe darf nur anlaufen, wenn der Deckel des Versorgungsbehälters geschlossen ist (S4 = 1). Funktionsplan [Funktionsplan in LOGO! erstellen und testen, evtl. zunächst auf Papier Überlege dir zunächst, wie der Setz- und Rücksetzeingang beschalten werden muss!] Bildquelle: Informatik und Informationstechnik für allgemeinbildende und beruflich Gymnasien, Europa Lehrmittel: Haan-Gruiten, 2011, S. 41 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 42 von 76 Steuerungen in der Mechatronik 4.7 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Reaktionstester Mit zwei RS-Flipflops soll ein Reaktionstester für zwei Spieler gebaut werden (siehe Abbildung). Gewonnen hat der Spieler, welcher zuerst seinen Buzzer betätigt und der Gewinn wird über eine Lampe angezeigt. Der Zustand der Lampen kann durch erneutes Drücken der beiden Spieler nicht mehr geändert werden, sondern muss über die Taste Neues Spiel in den Ausgangszustand versetzt werden. Funktionsplan zunächst auf Papier, dann Abbildung durch Grundverknüpfungen und Leitungen ergänzen. Bildquelle: Informatik und Informationstechnik für allgemeinbildende und beruflich Gymnasien, Europa Lehrmittel: Haan-Gruiten, 2011, S. 41 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 43 von 76 Steuerungen in der Mechatronik 4.8 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Straßenbahn In der Straßenbahn signalisiert der Fahrgast mit dem Betätigen von S1, dass er an der nächsten Haltestelle aussteigen möchte. Der Wunsch des Fahrgastes wird gespeichert und über die Lampe P1 als Haltesignal angezeigt. a) Entwerfe eine passende Schaltung, in dem du die Abbildung durch Leitungen und ggf. logische Grundfunktionen (UND, ODER, NICHT) ergänzt. An der nächsten Haltestelle gibt der Fahrer über den Taster S2 die Tür frei. Die Tür öffnet nun automatisch, falls vorher S1 betätigt wurde. Es besteht aber auch die Möglichkeit, die Tür mit dem Drücken der Taste S1 direkt an der Haltestelle zu öffnen. Tür öffnet:E = 1, wobei ein Impuls an E genügt. Nach 15 Sekunden schließt die Tür automatisch (was in der Aufgabe nicht umgesetzt werden muss). b) Erweitere die Schaltung entsprechend. Ist die Tür vollständig geöffnet, soll die Lampe P1 (Haltesignal) gelöscht werden. Die Türanlage liefert bei vollständig geöffneter Tür A = 1, in allen anderen Fällen A = 0. Mit der Taste S3 sperrt der Fahrer die Türanlage und das Haltesignal wird gelöscht. P1 S Q R Bildquelle: Informatik und Informationstechnik für allgemeinbildende und beruflich Gymnasien, Europa Lehrmittel: Haan-Gruiten, 2011, S. 41 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 44 von 76 Steuerungen in der Mechatronik 5 Zeitgeber, Timer 5.1 Einschaltverzögerung Eingang 0 → Ausgang 0 5.2 Eingang 1 → während der Verzögerungszeit ist der Ausgang 0 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Eingang 1 → nach der Verzögerungszeit ist der Ausgang 1 Logo-Ausschaltverzögerung Eingang 0 und Zeit abgelaufen → Ausgang 0 Steuerungstechnik-Mech2015.odt Otto Bubbers Eingang 1 → Ausgang 1 Eingang wechselt auf 0 → während der Verzögerungszeit ist der Ausgang 1 Seite 45 von 76 Steuerungen in der Mechatronik 5.3 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Norm-Ausschaltverzögerung Trg Q Zeit läuft Eingang 0 und Zeit abgelaufen → Ausgang 0 5.4 Eingang 1 → Ausgang 0 Eingang wechselt auf 0 → während der Verzögerungszeit ist der Ausgang 1 Lauflicht mit Norm-Ausschaltverzögerungen Durch Hintereinanderschaltung von 3 Norm-Ausschaltverzögerungen ist ein Lauflicht nach dem vorgegebenen Ablaufdiagramm zu programmieren. I1 Q1 Q2 Q3 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 46 von 76 Steuerungen in der Mechatronik 5.5 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Automatisches Lauflicht a) Nr 5.4 ist entsprechend de folgenden Ablaufdiagramms abzuändern. I1 Q1 Q2 Q3 b) Statt des Schalters wird ein Merker verwendet, der nach Doppelklick als „Anlaufmerker“ verwendet wird. 5.6 Einfache Ampelsteuerung Folgender Ablauf soll realisiert werden: Anleitung: M1 M2 M3 M4 rot gelb grün 5.7 Bauen Sie eine NormAusschaltverzögerung auf, wobei sie jedoch den Ausgangsblock Q1 durch einer Merker M1 ersetzen Kopieren Sie die entstandene Verzögerungsschaltung drei Mal untereinander und verschalten Sie diese wie für ein Lauflicht. Schalten Sie Die Ausgänge der Merker sind nun mit geeigneten UND/-ODERVerknüpfungen mit den Ausgängen Q1 (rot), Q2 (gelb), Q3 (grün) zu verbinden. Fußgänger-Ampel Ergänzen Sie Ihre Ampel durch eine Fußgängerampel. 5.8 Fußgänger-Bedarfsampel Ändern Sie Ihre Ampel so ab, dass der Zustand „Auto-rot“ nur dann verlassen wird, wenn ein Fußgänger „grün“ angefordert hat. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 47 von 76 Steuerungen in der Mechatronik Carl-Engler-Schule Karlsruhe Technisches Gymnasium Achtung: Die folgenden Beispiele von Ablaufsteuerungen sind der Umwelttechnik entnommen. Im Unterricht der Mechatronik wird die Hardware Festo-Meclab eingesetzt. Die entsprechende Ergänzung dieses Scripts erfolgt, sobald ich Zeit dazu finde. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 48 von 76 Steuerungen in der Mechatronik Steuerungstechnik-Mech2015.odt Otto Bubbers Carl-Engler-Schule Karlsruhe Technisches Gymnasium Seite 49 von 76 Steuerungen in der Mechatronik 6 Prinzip von Ablaufsteuerungen 6.1 Funktion einer Schrittkette Carl-Engler-Schule Karlsruhe Technisches Gymnasium 6.1.1 Schaltung einer Schrittkette in LOGO oder in Fluid-Sim M1 M2 ≥1 ∙∙∙ Start-Bedingung, z.B. Start-Taster Schritt1 M1 & ≥1 S R Schritt2 Übergangs-Bedingung zu Schritt 2 & ≥1 Bedingung alle Schritte auf 0 S R Q1 Betriebsmittel 1 Q2 Betriebsmittel 2 Q3 Betriebsmittel 3 M M2 M Logik zur Ansteuerung der Betriebsmittel ∙ ∙ ∙ ∙ ∙ ∙ 6.1.2 Prinzipien • Nach dem Einschalten (Reset) sind alle RS-FFs rückgesetzt (M=0) • Ein Schritt ist aktiv, wenn das zugehöhrige RS-FF gesetzt ist (M=1) • Es kann nur in den nächsten Schritt geschaltet werden, wenn eine Übergangsbedingung erfüllt ist und der vorhergende Schritt aktiv ist. Dies wird erreicht durch die Rückführung (rot) des Ausgangs M1 auf die UNDVerknüpfung vor dem S-Eingang von M2. • Ein RS-Flipflop kann nur dann zurückgesetzt werden, wenn das RS-FF des Folgeschritts gesetzt wurde (M=1) oder bei NOT-Aus. Sobald Schritt 2 aktiv ist, wird Schritt1 sofort 0. Dies wird sichergestellt durch die Rückführung (blau) von M2 auf das ODER vor dem R-Eingang von M1. • Die Ansteuerung der Betriebsmittel erfolgt durch logische Verknüpfung der FlipflopAusgänge. 6.1.3 Anmerkung: Warum heißen die Flipflop-Ausgänge M? Normalerweise bezeichnet man die Flipflop-Ausgänge mit Q. Wenn wir aber die Schaltung in LOGO eingeben, heißen die Ausgänge der Schaltung Q, an denen die Betriebsmittel (Lampen, Motoren usw.) angeschlossen sind. Hinter die RS-FFs müssen Merker geschaltet werden, die sich die Zustände der RS-FFs merken. Daher bezeichnen wir die Ausgänge der Flipflop-Schaltungen mit den Merkern als M und die Ausgänge der Gesamtschaltung mit Q. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 50 von 76 Steuerungen in der Mechatronik 6.2 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Grafische Ablaufdarstellung einer einfachen Befüllung Technologieschema 6.2.1 Beschreibung der Anlage Ein Behälter besitzt je einen Flüssigkeits-Zulauf- und ein Ablaufventil. Ein Rührer bewegt die Flüssigkeit im Behälter. Zwei Sensoren messen einen oberen und einen unteren Füllstand. 6.2.2 Gewünschter Ablauf Ventil oben M Rührer Füllstand Nachdem die Anlage mit Spannung versorgt wurde und oben damit eingeschaltet ist, befindet sie sich im Grundzustand, in dem beide Ventile geschlossen sind und der Rührer sich Füllstand nicht dreht. unten Die Befüllung wird durch Drücken des Starttasters gestartet. Dann läuft von oben solange Flüssigkeit in den Behälter, bis Ventil unten der obere Füllstand erreicht ist. Das untere Ablaufventil ist dabei geschlossen, aber der Rührer dreht sich. Anschließend wird das obere Ventil geschlossen und die Starttaster (durch die Füllstandsmessung portionierte Flüssigkeit) läuft unter ständigem Rühren druch Öffnen des unteren Ventils ab (z.B. in eine Flasche, die genau den Behälterinhalt aufnehmen kann). Ist der untere Füllstand unterschritten (Behälter leer), geht die Anlage wieder in den Grundzustand. 6.2.3 Grafik des Ablaufs Step1 Starttaster gedrückt Start_Taster & Step2 Füllstand oben erreicht Fuell_oben Fuell_unten Ventil oben auf Ventil_oben N Rührer einschalten Ruehrer N Ventil unten auf Ventil_unten N Rührer einschalten Ruehrer & Step3 Füllstand unten erreicht N & Zu Step1 Der Wechsel von einem Schritt in den nächsten erfolgt durch die links angegebenen Bedingungen. Rechts wird angegeben, welcher Aktor in welchem Schritt angesteuert wird. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 51 von 76 Steuerungen in der Mechatronik 6.3 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Zugehöriges Zeitablaufdiagramm: einfache Befüllung Annahme: Zu Beginn ist der Behälter leer. Starttaster Füllstand oben Füllstand unten Step1 (M1) Step2 (M2) Step3 (M3) Ventil oben Ventil unten Rührer Zustand, Schritt Grundzustand, Schritt 1 Befüllen, Schritt 2 Entleeren, Schritt 3 Grundzustand, Schritt 1 Füllstand unten Füllstand oben Beim Einschalten Starttaster → Wechsel zu Step1 → Wechsel zu Step3 setzt der → Wechsel zu Step2 → M3 = 0, M1 = 1 → M2 = 0, M3 = 1 Anlaufmerker → M1 = 0, M2 = 1 → Ventil unten M1 auf 1. → Ventil oben Alle anderen Füllstand unten Taster Füllstand oben Schritte bleiben 0. betätigen unterschritten überschritten Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 52 von 76 Steuerungen in der Mechatronik 6.4 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Schaltung aufgebaut in LOGO Eingänge Schrittkette Ausgänge →Übergangsbedingungen von einem Schritt zum nächsten → immer nur ein Schritt ist aktiv →Aktoren sind in einem oder mehreren Schritten aktiv Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 53 von 76 Steuerungen in der Mechatronik 7 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Ablaufsteuerung einer Waschstraße Ber Gebl RW M M Anlage Ein Start NotAUS Transp Hrot Hgr L1 M Hgr Hrot L2 L3 M H Ind Der zeitliche Verlauf dieser Ablaufsteuerung lässt sich folgendermaßen beschreiben: Grundzustand: AUS Nach dem Einschalten der Versorgungsspannung und nach NOT-AUS. Alle Betriebsmittel sind aus, das Relais H besitzt eine Ruhekontakt, an dem die rote Ampel angeschlossen ist, diese leuchtet. 1. Schritt: BEREIT / AUSFAHRT Die Ampel ist grün. 2. Schritt: EINFAHRT Der Waschvorgang kann durch Betätigen der Starttaste (Start =1) eingeleitet werden, allerdings nur dann, wenn ein Fahrzeug über die Induktionsschleife (Ind = 1) erkannt wird. In diesem Fall wird das Transportband (Trans =1 ) eingeschaltet. 3. Schritt: WASCHEN Das Fahrzeug wird vom Transportband durch die einzelnen Stationen der Waschanlage befördert. Erreicht das Fahrzeug die Lichtschranke 1 (L1 = 1), sollen die Reinigungswalze (RW = 1) und die Berieselungsanlage (Ber = 1) eingeschaltet werden. Gleichzeitig ist die rote Ampel (Hrot = 1) einzuschalten die signalisiert, dass das nächste Fahrzeug noch vor der Waschanlage warten muss. 4. Schritt: TROCKNEN Beim Erreichen der Lichtschranke 2 (L2 = 1) muss einerseits das Stellventil der Berieselungsanlage wieder geschlossen werden (Ber = 0), und andererseits ist die Reinigungswalze auszuschalten (RW = 0). Gleichzeitig schaltet sich das Trocknungsgebläse ein (Gebl = 1). 1. Schritt: AUSFAHRT Erreicht das Fahrzeug schließlich die Lichtschranke 3 (L3=1), ist der Trocknungsvorgang beendet. Gebläse und Transportband werden wieder ausgeschaltet. Die grüne Ampel muss eingeschaltet werden. Dieser Schritt entspricht dem Schritt BEREITschaft Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 54 von 76 Steuerungen in der Mechatronik 7.1 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Aufgaben Zeichnen Sie Ablaufdarstellung und vervollständigen Sie das Zeitablaufdiagramm. Entwickeln Sie daraus die Beschaltung der Schrittkette. Zeichnen Sie das LOGO!-Programm unter Verwendung einer fertigen Schrittkette. 7.2 Ablaufdarstellung Waschstraße Step1 & Step2 & Step3 & Step4 & Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 55 von 76 Steuerungen in der Mechatronik 7.3 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Zeitablaufdiagramm Waschstraße Anlage EIN Start Not-Aus Ind L1 L2 L3 Hrot H = grün RW Ber Gebl Trans Zustand, Schritt Bereit Schritt 1 Einfahrt, Schritt 2 Waschen, Schritt 3 Trocknen, Schritt 4 Bereit, Schritt 1 M1 = 1 M2 = 1 M3 = 1 M4 = 1 M1 = 1 AUS hier kann man ablesen gut die Ansteuerungsschaltung für Betriebsmittel ablesen: grün = M1 + M2 RW = Ber = M3 Gebl = M4 Trans = M2 + M3 + M4 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 56 von 76 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Steuerungen in der Mechatronik 7.4 Waschstraße Steuerungsschaltung mit Schrittkette aus RS-Flipflops schwarz: vorgefertigtes Arbeitsblatt blau: ergänzte Bauteile für die Waschstraße M1 M1 M2 ≥1 M3 EIN M2 ≥1 S R M4 M1 & M3 M2 L1 M4 M3 L2 M1 M1 ≥1 Start Ind M3 Schritt1 & ≥1 L3 M2 RW Schritt2 & ≥1 S R M2 Ber Gebl Schritt3 & ≥1 H (grün) S R M3 ≥1 Trans Schritt4 & ≥1 S R M4 Not-AUS Hinweis: Die rote Lampe geht an, wenn die grüne Lampe aus ist. Die Umschaltung erfolgt durch das Relais H Besonderheiten: • Einschalten (EIN) der Anlage möglich nach dem Resetzustand (M1=M2=M3=M4=0) oder nach Schritt 4. • M4 wird gelöscht, wenn M1 = 1. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 57 von 76 Steuerungen in der Mechatronik 7.5 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Schrittkette Waschstraße in LOGO Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 58 von 76 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Steuerungen in der Mechatronik 8 Schaltwerk für eine Waschmaschine Mit Hilfe einer Schrittkette soll eine Waschmaschinensteuerung entworfen werden. 8.1.1 Betriebsmittel • Kaltwasserventil V • Heizung H • Motor M • Pumpe P Wasserzulauf Ventil Waschtrommel V 8.1.2 Weiterschaltung in den nächsten Schritt ist abhängig von • einem Starttaster S, • einem oberen Füllstandssensor Foben, • einem unteren Füllstandssensor Funten, • einem Temperatursensor T • und einem Zeitgeber Z. Heizung H Wasserablauf M Motor Pumpe M P 8.1.3 Funktion des Zeitgebers Sobald an seinem Eingang Ze eine 1 anliegt, liefert der Ausgang Za nach genau 10 Minuten einen kurzen Impuls. Ze Ze Za Za 20min 8.1.4 Ablauf Der Ablauf der Steuerung findet in den folgenden Schritten statt: 1. Alles ausgeschaltet (nach Reset) 2. Wasserzulauf Start des Waschvorgangs durch Taste S (S=1) -> Waschtrommel mit Wasser füllen (V=1), bis Füllstand (Foben=1) erreicht. 3. Heizen Motor einschalten (M=1). Heizung einschalten (H=1), bis Temperatur (T=1) erreicht. 4. Waschen Zeitgeber aktivieren -> Motor bleibt eingeschaltet, bis nach 10 Minuten kurz Za=1 wird. 5. Abpumpen Motor ausschalten. Abpumpen (P=1), bis der Füllstand unterschritten wird (Fu=0) 6. Alles ausgeschaltet wie 1. -> Ende des Waschvorgangs 8.2 Aufgaben Zeichnen Sie Ablaufdarstellung und vervollständigen Sie das Zeitablaufdiagramm. Entwickeln Sie daraus die Beschaltung der Schrittkette. Zeichnen Sie das LOGO!-Programm unter Verwendung einer fertigen Schrittkette. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 59 von 76 Steuerungen in der Mechatronik 8.2.1 Verwendete Abkürzungen 8.3 V M H P S Fo Fu T Ze Za Carl-Engler-Schule Karlsruhe Technisches Gymnasium Ventil Motor Heizung Pumpe Starttaste Füllstand Füllstand Temperatursensor Zeitgeber Zeitgeber oben unten Eingang Ausgang Ablaufdarstellung Waschmaschine Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 60 von 76 Steuerungen in der Mechatronik Steuerungstechnik-Mech2015.odt Otto Bubbers Carl-Engler-Schule Karlsruhe Technisches Gymnasium Seite 61 von 76 Steuerungen in der Mechatronik Carl-Engler-Schule Karlsruhe Technisches Gymnasium Step1 & Step2 & Step3 & Step4 & Step5 & Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 62 von 76 Steuerungen in der Mechatronik 8.4 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Zeitablaufdiagramm Waschmaschine Starttaste S Füllstand oben Fo Füllstand unten Fu Temperatur T Ze Zeitgeber Eingang Za ZeitgeberAusgang Ventil V Motor M Heizung H Pumpe P Zustand, Aus WasserGrund- zulauf zustand Schritt 1 Schritt M1 = 1 8.5 Heizen, Waschen, Schritt 2 Schritt 3 Abpumpen, Aus GrundSchritt 4 zustand M2 = 1 M3 = 1 M4 = 1 Erklärung der Funktion des Zeitgebers (Timers) Der Zeitgeber heißt in Logo Einschaltverzögerung. Wir versenden ihn aber als Übergangsbedingung, um einen Zustand (Schritt) wieder automatisch zu verlassen. • • Der Eingang des Zeitgebers wird an den Ausgang des FFs angeschlossen, das den Schritt signalisiert, hier Schritt3. Sobald der Schritt aktiv ist, startet der Zeitgeber. Ze Ze Za Za 20min • Wenn die im Funktionsbaustein eingestellte Zeit abgelaufen ist, geht der Ausgang des Zeitgebers auf 1. Dieser ist an den Setz-Eingang des nächsten RS-FFs angeschlossen. Dadurch beginn der nächste Schritt (4) • Mit diesen nächsten Schritt (4) wird das FF des vorherigen Schritts (3) rückgesetzt und damit auch der Eingang des Zeitgebers. Dadurch geht auch der Ausgang des Zeitgebers wieder auf 0. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 63 von 76 Steuerungen in der Mechatronik 8.6 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Schrittkette Waschmschine, realisiert mit LOGO Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 64 von 76 Steuerungen in der Mechatronik 9 Schwimmbecken mit Sonnenkollektorheizung 9.1 Technologieschema Carl-Engler-Schule Karlsruhe Technisches Gymnasium Reinigungsmittel Sonnenkollektor S Starttaste RMleer Filter Wärmetauscher H Heizung ZH Zusatzheizung an RMauf Schwimmbecken SP Solarpumpe Duchfluss zum Filter V=0 Durchfluss zum Wärmetauscher V=1 9.2 TB Temperatur Becken UP Umwälzpumpe Gewünschter Ablauf 0. Aus: Alle Betriebsmittel aus, 2-Wegeventil Richtung Filter Einschalten mit Starttaste, dies kann auch der Impulskontakt einer Zeitschaltuhr sein. Bei allen weiteren Schritten ist die Umwälzpumpe an. 1. Reinigungsmittel hinzufügen bis Portionsbehälter leer (RMleer = 1). 2. Durchfluss zum Wärmetauscher, Solarpumpe an bis Zeitgeber 15min abgelaufen ist. Das Becken wird über die Wärmetauscher von den Sonnenkollektoren geheizt. 3. Durchfluss zum Filter, Heizung an, falls Zusatzheizung gewünscht (ZH = 1) und Temperatur des Beckens zu gering ist (TB = 0). Übergang zum nächsten Schritt wenn der Zeitgeber nach 10min abgelaufen ist. 4. Durchfluss zum Filter, Heizung aus, Nutzung der Heizungsnachwärme für 5 min, anschließend weiter mit Schritt 2 Hinweis: Verwenden Sie 3 Zeitgeber-Bausteine (LOGO: Einschaltverzögerungen) 9.3 Aufgaben Ze Ze Za Za 10min Zeichnen Sie die Ablaufdarstellung und vervollständigen Sie das Zeitablaufdiagramm. Entwickeln Sie daraus die Beschaltung der Schrittkette. Zeichnen und testen Sie das LOGO!-Programm unter Verwendung einer fertigen Schrittkette. Wenn der Ablauf funktioniert, fügen Sie folgende Änderung ein: Statt des Sensors TB wird die gemessene Temperatur mit einem am Poti voreingestellten Sollwert verglichen. Temperatur 0...100°C entspricht in LOGO dem Zahlenwert 0 bis 1000. Ebenso ist am Poti theoretisch ein Vorgabewert von 0 bis 1000 (wobei der Wert elektrisch auf 250 begrenzt ist (25C°)) Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 65 von 76 Steuerungen in der Mechatronik 9.4 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Ablaufdarstellung Step1 & Step2 & Step3 & Step4 & 9.5 Zeitablaufdiagramm Starttaste S RMleer Zusatzheizung gewünscht ZH Temperatur Becken TB Ventil Reinigungsmittel RM Umwälzpumpe UP Zweiwegeventil V Solarpumpe SP Heizung H 1. Timer 15 min 1. Timer 10 min 2. Timer 5 min Zustand, Schritt Aus Reinigungs15 min solar 10 min filtern, 5 min 15 min solar 10 min mittel zufügen beheizen heizen Nachlauf beheizen filtern M1 = 1 M2 = 1 M3 = 1 M4 = 1 M2 = 1 M3 = 1 Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 66 von 76 Steuerungen in der Mechatronik 9.6 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Schrittkette in LOGO mit analoger Temperaturmessung und Meldetexten Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 67 von 76 Steuerungen in der Mechatronik Steuerungstechnik-Mech2015.odt Otto Bubbers Carl-Engler-Schule Karlsruhe Technisches Gymnasium Seite 68 von 76 Steuerungen in der Mechatronik Steuerungstechnik-Mech2015.odt Otto Bubbers Carl-Engler-Schule Karlsruhe Technisches Gymnasium Seite 69 von 76 Steuerungen in der Mechatronik Carl-Engler-Schule Karlsruhe Technisches Gymnasium Hinweis: Zu Testzwecken wurden die Timer auf Sekunden statt Minuten eingestellt. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 70 von 76 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Steuerungen in der Mechatronik 10 Mischanlage 10.1 Technologieschema 10.2 F1 Füllstandssensor Behälter 1 V1 Auslass-Ventil Behälter 1 F2 Füllstandssensor Behälter 2 V2 Auslass-Ventil Behälter 2 R Rührer H Heizung Fo Füllstand oben Fm Füllstand Mitte Fu Füllstand unten (leer -> Fu = 0) T Temperatur Mischbehälter VM Auslass-Ventil Mischbehälter S Starttaste Behälter 1 Behälter 2 F2 F1 V1 V2 M R MischBehälter Fo T Fm H Fu VM S Starttaste Gewünschter Ablauf Grundzustand: alle Betriebsmittel aus, Ventile sind geschlossen. Jeder der Behälter 1 + 2 besitzt ein rote Warnlampe, die signalisiert, dass der Behälter leer ist. Wenn eine der Lampen leuchtet, kann die Anlage nicht gestartet werden. Wenn der Mischbehälter leer ist , die beiden Behälter 1+2 gefüllt sind und die Starttaste gedrückt wird, öffnet Ventil das Ventil des Behälters 1 und Flüssigkeit 1 wird in den Mischbehälter gefüllt. Wenn der untere Füllstand (Fu = 1) erreicht ist, wird V1 geschlossen und die Flüssigkeit aus Behälter 2 wird in den Mischbehälter gefüllt bis der obere Füllstand (Fo = 1) erreicht ist. Nun ist der Zulauf beider Flüssigkeiten beendet, sie können verrührt werden. Dazu werden Rührer und Heizung eingeschaltet bis die gewünschte Temperatur erreicht ist (T = 1). Nun bleibt der Rührer 10 min alleine an. Anschließend wird die Mischflüssigkeit mit VM abgelassen, der Rührer bleibt eingeschaltet. Sobald der Mischbehälter leer ist, geht die Anlage in den Grundzustand. 10.3 10.4 Aufgaben • Überlegen und begründen Sie, wie viele Zustände Sie benötigen und benennen Sie die Zustände sinnvoll. • Zeichnen Sie das Zustandsdiagramm oder die GRAFCET-Darstellung sowie das Zeitablaufdiagramm. • Entwickeln Sie daraus die Beschaltung der Schrittkette. • Zeichnen Sie das LOGO!-Programm unter Verwendung einer fertigen Schrittkette Zusatzaufgabe Die Füllstände Fo, FM, Fu werden von einem analogen Sensor FA erfasst. Welche Programmänderungen sind notwendig? Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 71 von 76 Steuerungen in der Mechatronik 10.5 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Ablaufdarstellung Step1 & Step2 & Step3 & Step4 & Step5 & Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 72 von 76 Steuerungen in der Mechatronik 10.6 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Zeitablaufdiagramm Starttaste S Füllstand Behälter 1 F1 Füllstand Behälter 2 F2 Füllstand Mischbehälter oben Fo Füllstand Mischbehälter Mitte Fm Füllstand Mischbehälter unten Fu Temperatur T Ventil Behälter 1 V1 Ventil Behälter 2 V2 Ventil MischBehälter VM Rührer R Heizung H Zustand, Schritt Aus Flüssigkeit 1 Flüssigkeit 2 Heizen befüllen befüllen M1 = 1 M2 = 1 M3 = 1 Rühren 10 min M4 = 1 Entleeren M5 = 1 Flüssigkeit 1 befüllen M1 = 1 Hinweis: Wenn man den Ablauf mit 4 Schritten löst, bleibt der Ablauf bestehen, jedoch sind M4 und M5 zusammen ein Schritt. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 73 von 76 Steuerungen in der Mechatronik 10.7 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Mischanlage Schrittkette mit 3 Schritten in LOGO Der Timer startet den 5. Schritt. Dessen Ausgang geht wieder auf null, wenn der Eingang (M4 ) beim 5. Schritt auf null geht. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 74 von 76 Steuerungen in der Mechatronik 10.8 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Mischanlage Schrittkette mit 4 Schritten in LOGO Hier sieht man, warum der Timer in LOGO Einschaltverzögerung heißt. Er schaltet das Ventil VM in Schritt 4 mit einer Verzögerung ein. Das Ventil wird ausgeschaltet, wenn der Timereingang auf null geht, also Schritt 4 beendet wird weil der Mischbehälter leer ist. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 75 von 76 Steuerungen in der Mechatronik 10.9 Carl-Engler-Schule Karlsruhe Technisches Gymnasium Mischanlage mit analogem Füllstandssensor des Mischbehälters An den analogen Eingang sind 3 analoge Schwellwertschalter geschaltet, die feststellen, ob der Füllstand oberhalb des eingestellten Schwellwerts ist. Die eingestellten Schwellwerte sind unten: 1% , Mitte: 40%, oben 80% des Maximalwerts. Da der LOGO-interne maximale Rechenwert 1000 beträgt (-> 10V), wurde 10, 400, 800 eingestellt. Steuerungstechnik-Mech2015.odt Otto Bubbers Seite 76 von 76