Wechselstromkreis 4.1 Einführung Kein Strom und keine Spannung
Werbung

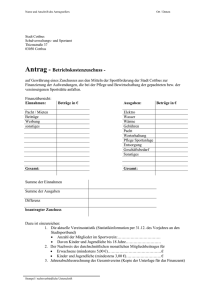
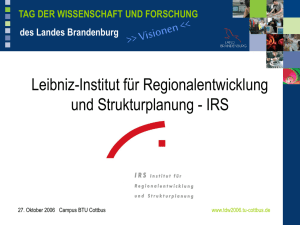
BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Kapitel 4: 4.1 Wechselstromkreis Einführung Kein Strom und keine Spannung wird in der Praxis einen konstanten Wert haben. Elektrische Vorgänge sind mehr oder weniger immer zeitabhängig und damit Wechselgrößen. Dies gilt, wenn auch mit ganz unterschiedlichem Hintergrund, für die Energietechnik und die Nachrichtentechnik. In der Nachrichtentechnik braucht man zeitlich veränderliche Größen, weil mit einer Spannung oder einem Strom von konstantem Wert keine Information übertragbar ist. Informationsübertragung bedeutet auch, daß der Empfänger am Ende einer Übertragungsstrecke zu einem Zeitpunkt t0 nicht weiß, welches Signal er zu einem späteren Zeitpunkt t1 empfangen wird. Die Signale werden also sogar nicht nur zeitlich veränderlich sein, sondern auch eine irreguläre Form haben. In der Energietechnik sind zeitlich veränderliche Ströme und Spannungen deshalb eine Notwendigkeit, weil beim Transport elektrischer Energie hohe Spannungen (bis ca. 500 000 V) und geringe Ströme vom Vorteil sind. Die Transportverluste sind im wesentlichen proportional dem Quadrat des Stromes. Auf der anderen Seite wird die elektrische Energie nur bei mittleren Spannungen (ca. 5000 V im Kraftwerk) erzeugt und bei noch geringeren Spannungen (3-5 V in der Digitaltechnik, bis zu maximal einigen hundert Volt bei Motoren) verbraucht. Es ist also notwendig, für die Übertragung vom Erzeuger zum Verbraucher die elektrische Energie zwischen verschiedenen Spannungsebenen zu transformieren. Diese Transformation ist nur bei Wechselströmen geeigneter Frequenz möglich. Im einfachsten und für die Energietechnik idealen Fall hat eine Wechselstrom einen zeitlichen Verlauf, der einer Sinus-Schwingung entspricht. Die Schwingfrequenz wird dann in Hertz (Hz) gemessen. Weltweit existieren Stromnetze mit 50 Hz bzw. 60 Hz (Nordamerika). Nur die elektrischen Bahnen in Teilen Europas verwenden den abweichenden Wert von 16 2/3 Hertz. Die Spannungen und Ströme in der Energietechnik sind tatsächlich im wesentlichen sinusförmig. Aber auch für viele Vorgänge der Elektronik und der Nachrichtentechnik ist die Sinus-Näherung für den Zeitverlauf eine brauchbare und für mathematische Berechnungen günstige Näherung. (Am schlechtesten paßt diese Näherung leider für die Digitaltechnik, weil dort gerade sinusförmige Signale keine Rolle spielen). Die Elektrotechnik hat deshalb Methoden und Werkzeuge entwickelt, welche elektrische Schaltungen auf der Basis der Sinus-Näherung berechnen und analysieren. 4.2 Strom, Spannung und Leistung im Wechselstromkreis Wir haben an anderer Stelle gelernt, daß in der Elektrotechnik zeitabhängige Großen klein geschrieben werden, also z. B. u(t), i (t). Für den Spezialfall der harmonischen Zeitabhängigkeit schreibt man dann: u (t) = U0 sin (ωt) i(t) = I0 sin (ωt) Das Argument der Sinusfunktion nennt man auch die Phase der Schwingung. Haben Spannung und Strom dieselbe Phase, so nennt man sie auch "phasengleich". 1 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 u (t) U0 t T Abb. 4.1: Harmonische Spannung U0 bzw. I0 ist dabei die Amplitude der Schwingung, T ist die Periode. Die Periode T ist das Doppelte der Zeit zwischen zwei Nulldurchgängen der Spannung. Den Parameter ω = 2π / T bezeichnet man als die Kreisfrequenz. Für die Frequenz f = 1 / T gilt dann auch: ω= 2π f. Die explizite Rechnung mit den Winkelfunktionen Sinus und Cosinus hat sich für die Praxis als wenig tauglich erwiesen. Es ist in der Physik allgemein üblich, Schwingungsvorgänge über komplexe Zahlen zu beschreiben. Wenn man z. B. der Spannung im Wechselstromkreis einen Realteil: ur (t) = U0 cosωt und einen Imaginärteil ui (t) = U0 sinωt zuordnet, so kann man nach der Eulerschen Formel ejωt = cosωt + jsinωt einen komplexen Spannungszeiger der Amplitude U0 definieren mit: u(t) = U0 e jωt Als Modellvorstellung rotiert ein Zeiger in der komplexen Ebene, wodurch sich periodisch wechselnde reale und imaginäre Anteile der Spannung entsprechend der Sinus- bzw. CosinusFunktion ergeben. Imaginärteil 90 Grad t>0 180 Grad 0 Grad t=0 Realteil 270 Grad Abb. 4.2: Spannungszeiger (Phasor) in der komplexen Ebene Legt man an einen Verbraucher, z. B. eine Glühlampe, eine sinusförmige Wechselspannung an, so ändert sich die Leuchtstärke entsprechend dem Absolutwert der momentanen Spannung. Dieser schwankt zwischen 0 und der Amplitude. Im Vergleich zu einer Gleichspannung mit der Höhe U0 ergibt sich dadurch ein anderes Verhalten. 2 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Eine solche Wechselspannung hat gegenüber einer Gleichspannung einen anderen sogenannten "Effektivwert". Für den Fall der Sinusspannung ist der Effektivwert Ueff kleiner als die Amplitude und zwar um den Faktor 2**1/2. Wir nehmen nun an, daß der Strom ebenfalls sinusförmig verläuft und zwar völlig zeitgleich mit der Spannung. Dann hat der Strom mit der Amplitude I0 einen Effektivwert der Höhe I eff = I0 / 2**1/2 . Dies bedeutet nun, daß an einen Widerstand im Wechselstromkreis im Mittel eine Leistung von: P = U0 * I0 / 2 abgegeben wird. Bei anderen Kurvenformen ist das Verhältnis zwischen Amplitude und Effektivwert natürlich davon unterschiedlich. In jedem Fall schwankt die Leistungsabgabe periodisch mit der Zeit. Da sowohl der Strom als auch die Spannung nach einer Sinusfunktion schwanken, ergibt das Produkt u(t) * i (t) immer einen Wert der größer oder gleich Null ist. Allerdings schwankt der Wert mit einer Frequenz von 2 f, also beim technischen Wechselstrom z. B. mit 100 Hz. Wir würden bei einer Glühlampe feststellen können, daß die Helligkeit des Fadens tatsächlich mit 100 Hz variiert. Multipliziert man einfach die Effektivwerte von Strom und Spannung, so ist das resultierende Produkt die sogenannte Scheinleistung Ps. Diese Leistung ist nur dann gleich der an einen Verbraucher abgegebenen Wirkleistung Pw, wenn Spannung und Strom gleichphasig sind. Tritt, wie unten dargestellt, eine Verschiebung zwischen den Sinuskurven von Strom und Spannung auf , so wird die Wirkleistung Pw kleiner als die Scheinleistung. u (t) t i (t) t φ Abb. 4.3: Phasenverschiebung im Wechselstromkreis Bei anderen Kurvenformen ist das Verhältnis zwischen Amplitude und Effektivwert natürlich davon unterschiedlich. In jedem Fall schwankt die Leistungsabgabe periodisch mit der Zeit. Daß Spannungen und Ströme zum selben Zeitpunkt Amplituden bzw. Nulldurchgänge erreichen ist der Idealfall. Im realen Wechselstromkreis sind Strom und Spannung keineswegs automatisch phasengleich. In Abb. 4.3 wird der Strom seinen höchsten Wert stets um einen gewissen Zeitraum später als die Spannung erreichen. Die beiden Größen sind um den sogenannten Phasenwinkel f gegeneinander verschoben. In diesem Beispiel eilt der Strom der Spannung nach. Man kann schreiben: u (t) = U0 sin (ωt) i(t) = I0 sin (ωt - φ) 3 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Auch die an den Lastwiderstand abgegebene Leistung ist nun unterschiedlich. Sie beträgt: Pw = U0 I0 / 2 * cosφ Bei einer Phasenverschiebung ist die Wirkleistung um den sogenannten "Leistungsfaktor" cos φgeringer als die sogenannte Scheinleistung Ps, die sich aus den Amplituden errechnet. Zusätzlich definiert wird die Blindleistung Pb = Ps * sin φ. Erreicht der Phasenwinkel an der Last, mit der der Stromkreis belastet wird, Werte von 90 Grad oder 270 Grad (positiv oder negativ), dann hat die Cosinusfunktion einen Nulldurchgang. In diesem Fall sind im Stromkreis zwar Ströme und Spannungen vorhanden, es wird aber keine Wirkleistung an ein Lastelement umgesetzt. Es wird nur sogenannte Blindleistung erzeugt. Wird die Blindleistung ausschließlich durch die Phasenverschiebung erzeugt, so spricht man von Verschiebungsblindleistung. Für das Verhältnis zwischen Scheinleistung Ps, Wirkleistung Pw und Blindleistung Pb gilt: Ps2 = Pw2 + Pb2 Im allgemeineren Fall von nicht-sinusförmigen Spannungen und Strömen definiert man eine zusätzliche Blindleistung, die nicht durch Phasenverschiebungen, sondern aus Verzerrungen der Kurvenformen entstehen. Diese Blindleistung wird als sogenannte "Verzerrungsblindleistung" bezeichnet. Sie spielt in technischen Wechselstromnetzen dort eine wichtige (negative) Rolle, wo Thyristoren und sogenannte Phasen-Anschnitt-Steuerungen zur Leistungsregelung verwendet werden. Bemerkenswert ist hier, daß man in einem Wechselstromkreis, dessen Last (induktiv oder kapazitiv) nur Blindleistung erzeugt bzw. benötigt, natürlich ohmsche Verluste auf den Übertragungsleitungen haben kann. Das ist ein allgemeines Problem der elektrischen Energietechnik: Manche Verbraucher benötigen nur eine relativ geringe elektrische Wirkleistung, erzeugen aber durch Blindleistung eine viel höhere Scheinleistung. Die Dimensionierung der Komponenten im Wechselstromkreis hat aber jeweils für den Fall der maximal möglichen Scheinleistung zu erfolgen. 4.3 Kondensator und Spule im Wechselstromkreis Der Wechselstromkreis ist also schon in seiner einfachsten Form viel komplexer als der Gleichstromkreis. Insbesondere müssen wir uns die Rolle von Kapazitäten und Induktivitäten neu überlegen. Z R L C Abb. 4. 4: Impedanz Ein Wechselstromkreis sei mit einer beliebigen Last verbunden. Diese wird im allgemeinen Fall aus ohmschen, kapazitiven und induktiven Anteilen bestehen. 4 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Ein solcher "Wechselstromwiderstand" wird auch als Impedanz Z bezeichnet, sein Kehrwert auch als Admittanz Y. Betrachten wir zunächst die Kapazität im Wechselstromkreis. Hier gilt für die Abhängigkeit zwischen Strömen und Spannungen: ic = C d uc / dt Der Strom durch den Kondensator ist also die zeitliche Ableitung der Spannung. Deshalb kann sich uc auch nur stetig ändern. Ist uc (t) gegeben durch: uc(t) = U0 sin ωt, dann gilt für den Strom: ic(t) = w C U0 cos ωt. Der Strom hat einen cosinusförmigen Verlauf. Umgerechnet auf eine Phasenwinkel bedeutet dies, daß der Strom der Spannung um einen Winkel von 90 Grad voreilt. Damit wird der ideale Kondensator im Wechselstromkreis im Mittel weder Energie erzeugen noch Energie verbrauchen. Er wirkt nur als Speicher, der periodisch Energie speichert und wieder abgibt. Im Spezialfall f = 0 (Gleichstrom) ist ic = 0. Im Gleichstromkreis wirkt der Kondensator als ideale Sperre. Geht dagegen f gegen unendlich, so wird der Kondensator zum Kurzschluß. Etwas problematisch ist die Definition des Kondensators im Wechselstromkreis. Aus der Abhängigkeit von Strom und Spannung kann man für die harmonische Zeitabhängigkeit einen sogenannten "Blindwiderstand" mit dem Betrag Z = 1/ωC. Dies gibt aber noch nicht wieder, daß wir hier durch die Kapazität auch noch eine Phasenverschiebung zwischen Strom und Spannung haben. Die Elektrotechniker geben Blindwiderständen, im Gegensatz zu den ohmschen Widerständen, imaginäre Werte. Entsprechend der Phasenverschiebung sind diese für die Kapazität negativ definiert. Es gilt also für die Kapazität: Z=-j/ωC Dabei ist "j" die "imaginäre Einheit", also die Quadratwurzel aus -1. Für die Mathematiker und Physiker heißt die imaginäre Einheit "i". Dieses Symbol ist aber in der Elektrotechnik schon fest an den Strom vergeben. (Fragen Sie einen Wissenschaftler, wie die Wurzel aus -1 heißt, und schon wissen Sie, ob er Ingenieur oder Physiker ist) Im Fall der Spule sehen die Verhältnisse genau umgekehrt aus. Hier gilt: uL = L di / dt. 5 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Mit i (t) = I0 sin ω t gilt: uL(t) = I0 ω L cos ω t Hier eilt jetzt die Spannung dem Strom um 90 Grad voraus, es ergibt sich eine Verschiebung um einen Phasenwinkel von + 90 Grad. Gilt nämlich (wie beim Kondensator erhalten): i (t) = I0 cos ωt, so wird: uL(t) = - L ω sin ω t Bei der Spule im Wechselstromkreis wird periodisch elektrische Energie in magnetische Energie, die im Magnetfeld der Spule gespeichert ist, und wieder zurück verwandelt. Es wird um so mehr Energie gespeichert, je größer die Induktivität L ist. Aus diesem Grund sind alle Spulen der Energietechnik, z. B. Transformatoren oder die Wicklungen elektrischer Maschinen, mit Eisenkernen versehen, die gegenüber Luftspulen mit gleichen Abmessungen die Induktivität um das Tausendfache und mehr erhöhen. Für Gleichspannung ist die Induktivität unwirksam, die (verlustlose) Spule ist ein idealer Kurzschluß. Dagegen wirkt sie für hohe Frequenzen als ideale Sperre. Wenn wir wieder einen Blindwiderstand definieren wollen, so kann man dem Vorgehen bei der Kapazität entsprechend schreiben: ZL = j ω L Die Induktivität hat also einen positiven Blindwiderstand. Zur Abrundung sei hinzugefügt, daß reale Kondensatoren und Spulen sich anders verhalten. Kondensatoren der Niederfrequenztechnik (z. B. sogenannte Elektrolyt-Kondensatoren) verhalten sich bei Frequenzen oberhalb von einigen Megahertz (MHz) wie verlustbehaftete Induktivitäten, dagegen haben reale Spulen stets Kapazitäten zwischen den Wicklungen, die sie bei hohen Frequenzen zu einer Kombination von Kapazitäten und Widerständen werden lassen. Natürlich hat auch der elektrische Widerstand R im Wechselstromkreis seine Bedeutung. Es gilt wie im Gleichstromkreis: u(t) = R * i(t). Der sogenannte "Wirkwiderstand" erzeugt also keine Phasenverschiebung zwischen Strom und Spannung. Er speichert auch keine elektrische Energie, sondern setzt diese in Wärme um. 4.4 Strom, Spannung und Widerstand im Wechselstromkreis 4.4.1 Impedanz und Admittanz In der Energietechnik und der analogen Nachrichtentechnik geht man oft implizit von einer harmonischen Schwingung aus. Wie wir schon gesehen haben, ist dann ein Differentialquotient gleichbedeutend mit einer Multiplikation mit dem Argument der harmonischen Funktion bzw. ein unbestimmtes Integral äquivalent einer Division durch das Argument. 6 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 R L C Z Impedanz Y Admittanz R L C Abb. 4.5: Wechselstromkreis Der Widerstand im Wechselstromkreis wird auch als Impedanz "Z" bezeichnet: Er enthält einen Wirkwiderstand R und einen Blindwiderstand X. In komplexer Schreibweise erhält man: Z=R+jX Der Leitwert G war im Gleichstromkreis als der inverse Wert des Widerstandes R definiert. Im Wechselstromkreis definiert man entsprechend eine Admittanz Y mit: Y=G+jB Für die Beträge der Impedanz bzw. der Admittanz gilt: Z2 = R2 + X2 Y2 = G2 + B2 Etwas schwieriger wird der Zusammenhang zwischen Spannungen und Strömen bei der Zusammenschaltung verschiedener Elemente im Stromkreis, also z. B. Widerstand, Kondensator und Spule. Wir nehmen wieder eine harmonische Zeitabhängigkeit an und wollen den Zusammenhang zwischen Spannung und Strom betrachten. Die Spannung habe die Amplitude U. Bei einer Reihenschaltung von Widerstand, Kondensator und Spule ergibt sich dann für den Strom bzw. seine Amplitude: I=U/Z mit: Z = R + jωL - j/ωC Da die Impedanz einen Realteil und einen Imaginärteil hat, erhält man entsprechend auch für den Strom einen "Wirkstrom" und einen "Blindstrom". Für jede komplexe Zahl K, die sich zusammensetzt aus einem Realteil Kr und einem Imaginärteil Ki kann man entweder schreiben: 7 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 K = Kr + jKi oder K = Kb ejφ. Dabei ist Kb der Betrag der komplexen Zahl mit Kb2 = Kr2 + Ki2 und φder sogenannte Phasenwinkel mit φ= arc tan (Ki / Kr). Entsprechend der sogenannten Eulerschen Formel kann man auch schreiben: ejωt = cosωt + jsinωt Damit kann man nun allgemein die harmonische Schwingung im Wechselstromkreis stets als zusammengesetzt aus einem Wirkanteil und einem Blindanteil auffassen. Zurück zum Stromkreis. Mit I = U / Z erhält man: I = U / (R+j(ωL -1/ωC)) I = U (R - j(ωL -1/ωC)) / (R2 +(ωL-1/ωC)2. Die Amplitude des Stroms ist damit eine komplexe Zahl mit Realteil und Imaginärteil. Der Betrag des Stromes wird errechnet dadurch, daß man die Quadrate von Realteil und Imaginärteil bildet und aus der Summe die Quadratwurzel zieht. Der Phasenwinkel: φ= arc tan (Imaginärteil/Realteil) gibt jetzt die resultierende Phasenverschiebung an. Ist hier φ negativ, so eilt der Strom der Spannung nach, ist er positiv, so eilt der Strom der Spannung vor. Impedanzen werden wie Widerstände bei der Serienschaltung addiert. Hat man parallel geschaltete Bauelemente, so ist es einfacher, mit der Admittanz Y zu rechnen, bei der sich die Leitwerte der einzelnen Bauelemente addieren. Es gilt: Y = G + j ω C - j / (ω L) (G=1/R) Y und entsprechend auch Z kann man real machen, wenn man einer Spule einen entsprechend großen Kondensator in Reihe oder parallel schaltet. Die Energietechnik tut dies in großem Maße zur sogenannten "Blindleistungskompensation". Wird z. B. ein elektrischer Motor, der meistens eine induktive Last darstellt, mit einem zusätzlichen Kondensator "kompensiert", so ist nur noch der für die Wirkleistung notwendige Strom zu übertragen, der zusätzliche Blindstrom entfällt. In realen Netzwerken wird man oft eine wilde Serien- und Parallelschaltung vieler Elemente haben, was insbesondere zusammen mit der Verwendung komplexer Zahlen zu oft etwas uneleganter Rechnerei ausartet. (Ein E-Techniker muß diese beherrschen, bei Informatikern muß das nicht sein). 4.4.2 Zeigerdiagramme Wie oben gezeigt, kann man Spannungen, Ströme und Widerstände im Wechselstromkreis bei harmonischer Zeitabhängigkeit als komplexe Größen darstellen. Bezüglich der Berechnung von Wechselstromschaltungen von Hand (oder, wie manche Leute sagen, zu Fuß) ist diese Darstellung nicht sehr übersichtlich. Deshalb verwenden die Energietechniker häufig Zeigerdiagramme. Zunächst kann man sich vorstellen, daß Ströme und Spannungen als Zeiger in der komplexen Ebene rotieren. Aber auch für die Impedanz und Admittanz ist eine entsprechende graphische Darstellung günstig (Abb. 4.6). 8 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 C R L Z Im Z R Z ωL 1 / ωC Re Z Abb. 4.6: Zeigerdarstellung in der komplexen Ebene für Impedanzen Induktive bzw. kapazitive Blindwiderstände werden als positive bzw. negative Zeiger in Richtung der imaginären Achse dargestellt, der Wirkwiderstand R ist real positiv. Der resultierende Impedanzzeiger ergibt sich aus der graphischen Addition der Anteile. Diese Modellvorstellung hilft vielleicht auch, die Phasenverschiebung zu verstehen: Wenn man eine komplexe Zahl (z. B. die Spannung) durch eine andere komplexe Zahl dividiert, so ergeben sich dadurch Verschiebungen der Anteile von Realtei- und Imaginärteil. Ein Beispiel wird in den Übungen vorgestellt. 4.4.3 Rechnen mit komplexen Größen Die Berechnung von Spannungen und Strömen im Wechselstromkreis erfolgt im Grunde nach den bereits im Gleichstromkreis definierten Gesetzen. Es gelten also sowohl das Ohmsche Gesetz (auch bezüglich der Scheinwiderstandes Z und der Admittanz Y) als auch die Kirchhoffsche Knoten- und Maschenregel. Nur sind, wenn man die Darstellung über komplexe Größen wählt, jetzt natürlich die Rechengesetze für komplexe Zahlen anzuwenden. Addition und Subtraktion: Es werden jeweils Realteil und Imaginärteil getrennt addiert bzw. subtrahiert. Beispiel: Gegeben sei die Reihenschaltung von Z1 = 10 + j 20 Ohm Z2 = 20 - j 30 Ohm und Die resultierende Impedanz ist: Z = 30 - j 10 Ohm Ihr Betrag wird gebildet durch: | Z | = [(Re Z )2 + (Im Z )2] 1/2 Also: | Z| = (1000) 1/2 Ohm Der Phasenwinkel wird gebildet aus: 9 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 φ= arc tan Im (Z) / Re (Z). Während man Addition und Subtraktion am leichtesten auf der Basis der Darstellung einer komplexen Größe als Realteil und Imaginärteil ausführt, ist für Multiplikation und Division die Darstellung mittels Betrag und Phase günstiger. Für die Multiplikation werden die Beträge multipliziert und die Phasenwinkel addiert. Für die Division werden entsprechend die Beträge dividiert und die Phasenwinkel subtrahiert. Häufig ergibt sich bei komplexer Rechnung ein Bruch mit komplexem Zähler und Nenner. Dann wird man stets versuchen, den Nenner real zu machen. Dies geschieht durch Erweiterung des Bruches mit dem konjugiert komplexen Wert des Nenners: Wir gehen von folgende Beispiel aus: A+jB Z = --------------- = C+jD (A + j B) (C - j D) AC + BD + j (BC - AD) ------------------- = ----------------------(C + j D) ( C - j D) C2 + D2 Ausführliche Rechnereien dieser Art wollen wir den Elektroingenieuren überlassen. Für den Informatiker ist aber wesentlich, daß es für Programme der Netzwerkberechnung im allgemeinen Fall nicht nur Daten vom Typ "Fließkomma" benötigt, sondern darüber hinaus ganz wesentliche Vorteile hat, wenn die Programmiersprache komplexe Zahlen zuläßt. Natürlich ergibt sich damit auch auf 32-Bit-Rechnern ein Aufwand, der den von Berechnungen mit Booleschen Varablen oder mit Integer-Zahlen ganz wesentlich übetrifft. Hier sei nur angemerkt, daß die Berechnung großer Netzwerke von mehr als tausend Knoten auch heute noch auf Probleme stößt. 4.5 Schaltungen der elektrischen Energietechnik (optional) Wir haben bisher einige Grundlagen erarbeitet, welche für die Elektrotechnik mit Energietechnik und Nachrichtentechnik und damit auch alles das, was der Informatiker "Hardware" nennt, gleichermaßen von grundlegender Bedeutung sind. Meistens versteht der Informatiker unter Hardware nur das, was er in Zeitschriften wie "Bit", "Byte", "Megabyte" oder "Millibyte" findet. Wir wollen uns deshalb auch nur auf die wichtigsten Grundlagen der elektrischen Energietechnik beschränken, wie sie für Informatiker von praktischer Bedeutung sind. 4.5.1 Transformatoren Induktivitäten haben wir an anderer Stelle als einzelne Bauelemente behandelt. Betrachten wir nun zwei als ideal angenommene Spulen (Abb. 4.7). 10 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 I1 I2 ideal U1 n2 n1 U2 ü Magnetfeld elektrische Energie elektrische Energie Abb. 4.7: Transformator Ein Transformator ist ein Bauelement, das elektrische Energie zunächst in magnetische Energie und wieder zurück verwandelt. Er besteht aus zwei gekoppelten Induktiväten. Auf der Primärseite wird durch eine Spule ein magnetisches Feld erzeugt, das wiederum die Windungen einer zweiten Wicklung schneidet. Jeder Strom auf der Primärseite ruft ein Magnetfeld hervor. Ist dieses Magnetfeld nicht konstant sondern zeitlich veränderlich, so induziert es in die Wicklungen der Sekundärseite wiederum eine Spannung. Wir nehmen nun der Einfachheit halber an, daß alle von der Spule der Primärseite ausgehenden Feldlinien auch die Spule auf der Sekundärseite schneiden. Wird der Magnetfluß in einem beiden Spulen gemeinsamen Eisenkern geführt, so ist diese Annahme sogar recht realitätsnah. Die Spule auf der Primärseite habe nun eine Windungszahl n1, die auf der Sekundärseite n2. Dann verhalten sich die Spannungen an den Klemmen des Transformators wie: U1 / U2 = n1 / n2 Umgekehrt verhalten sich dagegen die Ströme. Hier gilt: I1 / I2 = n2 / n1 Der Transformator übersetzt also die elektrische Energie auf der Eingangsseite auf ein anderes Niveau von Spannung und Strom auf der Ausgangsseite. Das Verhältnis n1 / n2 nennt man deshalb auch das Übersetzungsverhältnis ü. Sind die Wicklungen n1 und n2 gleichsinnig, so wird das Signal mit gleicher Polarität bzw. Phasenlage umgesetzt, bei entgegengesetztem Wicklungssinn erfolgt eine Umdrehung der Spannung. Ganz wichtig dabei ist, daß dabei die Primärseite und die Sekundärseite elektrisch voneinander isoliert sein können und meistens auch sind. Da nur ein veränderlicher Strom ein veränderliches Magnetfeld erzeugt und nur ein veränderliches Magnetfeld in einer statischen Spule eine Spannung hervorruft, kann man nur Wechselspannungen und Wechselströme transformieren. Gleichströme kann man nicht transformieren. Die Reduktion von Gleichspannungen von höheren auf niedrigere Werte funktioniert nur mit ohmschen Spannungsteilern 11 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 unter hohen Verlusten, die direkte Erzeugung höherer Gleichspannungen aus niedrigeren geht nur im kleinen, z. B. auf dem Chip im PC, ebenfalls mit ziemlich miserablem Wirkungsgrad. Die Anwendungen von Transformatoren sei zunächst am Beispiel der Energietechnik beschrieben. Elektrische Energie wird im Kraftwerk meistens bei Spannungen etwa zwischen 5ooo V und 25 000V hergestellt. Der Transport zum Verbraucher erfolgt über mehr oder weniger langer Übertragungs-leitungen (bis zu Tausenden von Kilometern). Die Verluste auf diesen Leitungen sind steigen quadratisch mit dem dort fließenden Strom. Man wird also elektrische Energie stets bei hohen Spannungen und geringen Strömen übertragen. In Europa sind über weite Strecken 380 000 Volt üblich, in den USA, Brasilien und Rußland geht man sogar auf bis zu 700 000 Volt (bei Gleichstrom). Kaum ein Verbraucher kann allerdings Spannungen von vielen tausend Volt direkt nutzen, allein schon wegen der Gefahr durch elektrische Überschläge. In der elektrischen Energieverteilung werden deshalb weitere Spannungsebenen von 220 000 Volt, 110 000 Volt, 25 000 Volt, 10 000 Volt, 5000 Volt und schließlich die 380 Volt des Niederspannungsnetzes verwendet. Alle diese Spannungsebenen sind über Transformatoren gekoppelt, die in der Energietechnik allerdings auch Umspanner heißen. Das sind dann Monster von bis zu 100 Tonnen und mehr Gewicht, die Leistungen von vielen Megawatt übertragen können. Größere elektrische Maschinen und Fahrmotoren arbeiten bei Spannungen bis etwa 1000 Volt, darüber ist auf engem Raum die Isolation kaum noch möglich. Sogar bei elektrischen Wechselstromlokomotiven, die aus der Fahrleitung mit 15 000 Volt versorgt werden, ist der Trafo mit 10 und mehr Tonnen Gewicht der schwerste Bestandteil. Um von den 380V bzw. 220 V des öffentlichen Niederspannungsnetzes auf die z. B. für den PC notwendigen 5V oder 3,3V oder 3,0 V zu kommen, ist nochmals eine Transformation notwendig. Dazu kann man natürlich einen Transformator bauen, der 220 V Eingangsspannung und 3V Ausgangsspannung hat. Solche Transformatoren sind allerdings ziemlich groß und schwer. Man kann deren Größe, Gewicht und Preis mit einem einfachen Trick reduzieren. Gleichrichter Transformator Gleichrichter Oszillator Un 220 V Unf Ug Vdd 50 kHz Abb. 4.8: Schaltnetzteil Wir haben mal gelernt, daß für die induzierte Spannung gilt: u = L di / dt Ein großes L bedingt einen großen, schweren und teuren Transformator. Wenn man das di / dt erhöht, kann man dafür L reduzieren, kommt also mit kleineren und leichteren Transformatoren aus. Deshalb haben heute fast alle Rechner sogenannte Schaltnetzteile. Die Netzspannung wird zunächst mittels eines Gleichrichters (wird noch behandelt) in eine Gleichspannung umgesetzt. Mit dieser hohen Gleichspannung wird eine sogenannte Oszillatorschaltung versorgt, welche im Bereich von etwa 50 bis 70 kHz schwingt, also über dem Bereich hörbarer Töne. Bei dieser Frequenz kommt man dann mit einem kleinen und leichten Transformator aus, dem wiederum ein Gleichrichter nachfolgt. Erst der liefert die mit "Vdd" gekennzeichnete Spannung für die ICs eines Rechners. Transformatoren werden also nicht nur bei der Netzfrequenz von 50 Hz verwendet, sondern spielen (mit abnehmender Bedeutung) auch in der Nachrichtentechnik eine Rolle. Sie werden dort aber meistens als "Übertrager" bezeichnet. 12 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 I1 U1 I2 n2 n1 U2 R ü I1 U1 R * ü**2 Abb. 4.9: Übertrager zur Widerstandsanpassung Die Funktion eines Übertragers ist in Abb. 4.9 dargestellt. Der Widerstandswert der Belastung an der Sekundärwicklung am Ausgang wird mit dem Quadrat des Übersetzungsverhältnisses auf die Primärseite übersetzt. In der Praxis wurden solche Übertrager häufig dazu verwendet, elektronische Verstärker (mit Röhren oder Transistoren), die optimal mit Lastwiderständen von einigen kOhm zu betreiben waren, an die niedrige Impedanz von Lautsprechern (typisch vier bis acht Ohm) anzupassen. Eine zweite wichtige Funktion ist die Potentialtrennung. Bei einem Übertrager mit getrennten Wicklungen sind diese elektrisch voneinander isoliert. I1 U1 I2 n2 n1 U2 R ü I1 U1 n1 U2 R I2 n2 Abb. 4.10: Spartransformator Man kann den Transformator zum Spartransformator vereinfachen, indem die Wicklung der Primärseite mit der Windungszahl n1 eine Anzapfung bei der Windungszahl n2 erhält. Die Wirkung ist bezüglich der Übersetzung von Strömen und Spannungen wie die des normalen Übetragers, jedoch geht die Eigenschaft der Potentialtrennung verloren. Sollen am Ausgang einer Schaltung Wechsel-spannungen mit einstellbarer Höhe erzeugt werden, so erhält der Sekundärkreis entweder mehrere, wahlweise schaltbare Abgriffe, oder einen kontinuierlich einstellbaren Abgriff (Regeltransformator). Vor der Verfügbarkeit von Leistungshalbleitern war dies fast die einzige Möglichkeit, Netzgeräte mit variabel einstellbarer Ausgangsspannung zu bauen. 4.5.2 Gleichrichtung, Spannungs- und Leistungsregelung 13 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Eine häufig in technischen Systemen vorkommende Aufgabe ist die Erzeugung einer Gleichspannung variabler Höhe aus einer Wechselspannung. 220 V Wechselspg. Trafo Siebglied Gleichrichter Gleichspannung Netz 220 V Wechselspg. Trafo Siebglied Stromrichter Gleichspannung Netz Abb. 4.11: Gleichspannungserzeugung durch Gleichrichter und Stromrichter u (t) Wechselspannung U0 t U0 Pulsierende Gleichspannung t U0 Spannungs-Pulse durch Phasenanschnitt t Abb. 4.12: Spannungen bei Gleichrichtung und bei Phasenanschnitt Zur Erzeugung einer Gleichspannung aus einer Wechselspannung erfolgt zunächst die Einstellung der Spannungshöhe durch einen Transformator. Der nachgeschaltete Gleichrichter enthält Halbleiterventile (Dioden), welche den Strom nur in einer Richtung durchlassen und in der Gegenrichtung sperren. Damit wird die negative Halbwelle quasi in positive Richtung umgeklappt. Die resultierende Spannung enthält zwar nur noch positive Spannungswerte, ist aber immer noch pulsierend, also eine Überlagerung aus Gleich- und Wechselanteilen. In einem nachfolgenden Schaltelement müssen die restlichen Wechselanteile noch unterdrückt werden. Eine Schaltung, die das leistet, nennt man ein Siebglied (die Nachrichtentechniker nennen so was einen Tiefpaß). Dort, wo variable Gleichspannungen bei höheren Leistungen benötigt werden, realisierte man diese zunächst mit Transformatoren, die auf der Sekundärseite variable Abgriffe haben. Solche Schaltwerke, die z. B. bei elektrischen Lokomotiven verwendet werden, sind schwer und teuer. 14 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Eine andere Möglichkeit, die diesen Aufwand einspart, bietet die Stromrichtertechnik. Werden nicht Dioden, sondern Thyristoren als Ventile verwendet, so kann der Stromfluß auch in Durchlaßrichtung gesteuert werden. Eine Stromrichterschaltung kann also weniger als eine Halbwelle durchlassen. Damit entsteht eine stark pulsierende Gleichspannung, deren Form und Höhe dadurch bestimmt ist, welchen Teil der positiven bzw. negativen Halbwelle die Ventile durchlassen. Auch hier ist nachfolgend ein Siebglied notwendig. Der wesentliche Vorteil der Phasenanschnittsteuerung ist der einfachere und leichtere Transformator ohne Schaltwerk. Wenn keine Potentialtrennung notwendig ist, dann ist der Transformator sogar verzichtbar. Der wesentliche Nachteil der Phasenanschnittsteuerung ist die stoßweise Entnahme von Energie aus dem Wechselstromnetz, die dort eine erhebliche Verzerrungsblindleistung zur Folge hat. Die am weitesten verbreitete Gleichrichterschaltung ist die Brückenschaltung. Sie benötigt insgesamt vier Ventile, die als Dioden oder Thyristoren (für die Phasenanschnittsteuerung) ausgeführt sein können. Wechselspannung _ + Gleichspannung Abb. 4.13: Brückengleichrichter Im Detail können sich noch Unterschiede ergeben. Je nachdem, ob man für die Ventile nur Dioden, zwei Thyristoren oder vier Thyristoren verwendet, spricht man von ungesteuerten, halb gesteuerten oder voll gesteuerten Gleichrichtern. Für eine Leistungssteuerung in Wechselstromschaltungen verwendet man häufig sogenannte TRIACs. Ein Triac besteht aus zwei antiparallel geschalteten Thyristoren mit einem gemeinsamen Gate-Anschluß. Mittels einer solchen Schaltung kann man also sowohl die positive als auch die negative Halbwelle "anschneiden". Das Gegenstück zu einem Gleichrichter ist ein Wechselrichter. Er wird aus einer Gleichspannung am Eingang eine geeignete Wechselspannung am Ausgang erzeugen. In der Digitaltechnik werden Gleich- und Wechselrichter in Geräten zur unterbrechungsfreien Stromversorgung, sogenannten USV-Einheiten, verwendet. Der Schritt über den Gleichstromzwischenkreis ist notwendig, da in chemischen Batterien nur Gleichstrom gespeichert werden kann. 4.5.3 Drehstrom Die elektrische Energie wird weltweit nicht als "einfacher" Wechselstrom, sondern in sogenannten Drehstrom-Netzen erzeugt und verteilt. Man hat dabei nicht eine Wechselspannung, sondern deren drei, die als sogenannte Phasen bezeichnet werden. Diese Phasen sind von gleicher Amplitude, ihre Sinuskurven sind allerdings jeweils um einen Phasenwinkel von 120 Grad gegeneinander verschoben. 15 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 R S T Sternschaltung N u ll-L e i t e r R S T D reiecksschaltung Abb. 4.14: Drehstromsystem Erzeugt wird die elektrische Energie im Kraftwerk in einem Drei-Phasen-Generator, dessen Wicklungen für die Phasen R, S und T einen gemeinsamen Erdungspunkt besitzen. Ein Verbraucher kann entweder zwischen eine der Phasen und den Massepunkt geschaltet werden (meistens für kleine Leistungen bevorzugt), was dann der Sternschaltung entspricht, es ist aber auch möglich, einen Verbraucher zwischen 2 Phasen zu schalten. Im Niederspannungsnetz steht zwischen einer Phase und den Erdanschluß eine Spannung mit dem Effektivwert von 220 V zur Verfügung, dagegen erreicht die "verkettete" Spannung zwischen zwei Phasen den Effektivwert von 380 V. Insbesondere für größere elektrische Maschinen werden bevorzugt alle drei Phasen mittels der Dreiecksschaltung benutzt. Im Vergleich zu einem Ein-Phasen-System hat man verringerte Ströme und ein Stromsystem, das für elektrische Antriebe "wie geschaffen" ist. Bei Verwendung einer geeigneten Gleichrichterschaltung, z. B. der Drehstrombrückenschaltung, erhält man aus dem Drehstom einen im Vergleich zum einphasigen Wechselstrom weniger welligen Gleichstrom. R _ + WechselGleich- spannung spannung S T GND Abb. 4.15: Drehstrombrückenschaltung In dieser Schaltung ist der Nulleiter des Drehstromsystems mit dem Minusanschluß des Gleichrichters identisch. Auch hier kann man zwecks Leistungssteuerung die Ventile wieder als Thyristoren ausführen. 16 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Schaltungen zur gesteuerten und geregelten Stromversorgung werden auch als "Stromrichter" bezeichnet. 4.5.4 Elektrische Maschinen In der Praxis wird eine große Vielfalt elektrischer Maschinen verwendet, die sich aber alle auf wenige Grundtypen zurückführen lassen. Für kleine Leistungen, also z. B. auch die Lüfter in Geräten der Nachrichtentechnik, werden bevorzugt Gleichstrommotoren eingesetzt. drehbarer Magnet Luftspalt Magnetkern Rotorwicklung ErregerWicklung Abb. 4.16: Gleichstrommotor Das Prinzip des Gleichstrommotors läßt sich prinzipiell recht einfach erklären. Im sogenannten Luftspalt zwischen den Polen eines Magneten existiert ein magnetisches Feld. Bringt man in dieses Feld einen zweiten Magneten, so wird dich dieser so auszurichten versuchen, daß sich jeweils ein Nordpol und ein Südpol gegenüberliegen. Bei einer drehbaren Aufhängung des Magneten im Luftspalt ergibt sich daraus schon eine Drehbewegung, die allerdings aufhört, wenn sich die jeweils gegensätzlichen Pole gegenüberstehen. Soll die Drehbewegung fortgesetzt werden, so muß man im richtigen Moment die Polarität des Magneten im Lufspalt umkehren. Dies funktioniert nur dadurch, daß der "Rotor" des Motors durch einen Elektromagneten gebildet wird, in dem die Stromflußrichtung rechtzeitig umgeschaltet wird. Die Umschaltung besorgt ein Kommutator genanntes Bauelement, über das der Strom dem Rotor über Schleifer, heute meistens sogenannte Kohlebürsten, zugeführt wird. Für sehr kleine Leistungen (z. B. Modelleisenbahn) arbeiten solche Motoren ganz gut mit einem Permamentmagneten für das äußere Magnetfeld. Für größere Leistungen ist auch im äußeren Kreis ein Elektromagnet notwendig, dessen Wicklung auch als Stator-Wicklung bezeichnet wird. 17 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Ri Rotor- Erreger- wicklung Wicklung Quelle Ri Quelle Rotor- Erreger- wicklung Wicklung Abb. 4.17: Reihenschluß- und Nebenschluß-Motor Man kann nun die Rotorwicklung und die Erregerwicklung entweder in Serie oder parallel betreiben und erhält dabei ganz unterschiedliche Verhaltensweisen des Motors, der entsprechend als Reihenschluß- oder Nebenschlußmotor betrieben wird. Bei stehendem Motor fließt in jedem Fall ein hoher Strom, der nur durch die ohmschen Widerstände in den Wicklungen des Motors selbst und denen des versorgenden Stromkreises abhängig ist. Dreht sich der Rotor, so wird entsprechend dem Induktionsgesetz in die Windungen des Rotors eine Spannung induziert, welche der Spannung von außen entgegengesetzt ist. Wenn das äußere Magnetfeld konstant bleibt, sinkt dadurch mit steigender Drehzahl der Rotorstrom ständig ab und damit auch das Drehmoment des Motors. Beim Reihenschlußmotor sinkt nun mit steigender Drehzahl der Strom durch den Rotor und den Stator. Damit steht bei niedriger Drehzahl (ab dem Stillstand) ein hohes Drehmoment zur Verfügung, das zu hohen Drehzahlen hin abnimmt. Der Motor ist also selbstregulierend. Ein solches Verhalten ist insbesondere für elektrische Antriebe sehr erwünscht. Beim Nebenschlußmotor wird der Strom durch die Statorspulen vom Ankerstrom nicht beeinflußt. Damit ist es hier möglich, daß der Motor auch bei höheren Drehzahlen noch ein Drehmoment erzeugt. Insbesondere kann man dadurch, daß man das Statorfeld reduziert, die Spannung, bei der der Rotor mit seiner induzierten Spannung die äußere Spannung ausgleicht, zu höheren Drehzahlen hin verschieben. Der Nebenschlußmotor kann dann "durchgehen", d. h. auf für seine mechanische Festigkeit unzulässige Drehzahlen kommen. Zu erwähnen bleibt noch, daß die mit einphasigem Wechselstrom niedriger Frequenz (typisch 16 2/3 Hertz) betriebenen Bahnstrommotoren ganz ähnlich aufgebaut sind. Sie benötigen nämlich auch das für den Reihenschlußmotor typische gute Anfahren aus dem Stillstand bei hoher Last. Für Motoren höherer Leistung wird man aber stets versuchen, das verschleißbehafetet Bauelement des Kommutators mit seinen Kohlebürsten zu vermeiden. Die Drehstromtechnik erlaubt die Konstruktion noch einfacherer Motortypen. 18 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Läufer T S Abb. 4.18: Drehstrom-Motoren Der Motor besteht zunächst wieder aus Stator (festen Spulen) und Rotor (auch Anker genannt, wenn er von einem Gleichstrom durchflossen wird). Hier findet jetzt aber eine Überlagerung der Magnetfelder statt, die von den mit den Phasen R, S, T gegeneinander verschobenen gespeisten Spulen erzeugt werden. Man erhält ein sogenanntes "Drehfeld". Der sogenannte Synchronmotor hat einen vom Gleichstrom durchflossenen Anker. Er läuft stets "synchron" mit dem Drehfeld und kann dabei sowohl Energie vom Drehfeld in den Läufer angeben (Motorbetrieb) als auch Energie vom Anker an das Drehfeld übertragen (Generatorbetrieb). Die letztere Art kennzeichnet den Betrieb von Generatoren im Kraftwerk. Man kann aber den Anker auch ohne Stromzuführung ausbilden. Dazu gibt man ihm einige kurzgeschlossene Wicklungen oder einen leitenden Eisenkern. Das äußere Drehfeld wird jetzt den Rotor "mitnehmen". Ein solcher Motor wird als "Asynchronmotor" bezeichnet. M o torbetrieb Generatorbetrieb D rehmoment Schlupf SD U /min. Abb. 4.19: Drehmoment-Drehzahl-Kennlinie des Asynchronmotors Der Asynchronmotor benötigt keine Zuführung von Gleichstom zum Läufer über Kohlebürsten oder ähnliche Konstruktionen. Er ist damit bei gleicher Leistung wesentlich kleiner und leichter als dieser. Sein größtes Drehmoment gibt dieser Motor bei einer Drehzahl knapp unterhalb der Synchron.Drezahl ab. Läuft er dagegen völlig synchron, so sinkt das Drehmonent auf null ab. Drehzahlen oberhalb der Synchonzahl sind nur möglich, wenn der Asynchronmotor von außen angetrieben wird. Er arbeitet dann als Generator und gibt Leistung an das Drehfeld ab. Ein Hochlaufen aus dem 19 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Stillstand ist möglich, allerdings bei nur geringem Drehmonent. Für Antriebe ist der Asynchronmotor dann, wenn er an eine feste Frequenz des Drehfeldes gebunden ist, deshalb weniger günstig als z. B. der Reihenschlußmotor. Wegen seines einfachen Aufbaus wird er trotzdem häufig in Geräten dort, wo ein Anlauf bei niedriger Last erfolgen kann, eingesetzt (Staubsauger, Lüfter, Ventilatoren usw.). Bei einphasigem Netz kann man das Drehfeld hilfsweise mittels eines Kondensators erzeugen. Soll der Asynchronmotor unter Abgabe eines großen Drehmonents anlaufen, so muß er ein Drehfeld geeigneter Frequenz angeboten bekommen. Die elektrische Antriebstechnik stellt inzwischen sogenannte fremdgeführte Wechselrichter zur Verfügung, welche je nach Bedarf aus einer Wechselspannung zunächst eine Gleichspannung und daraus wieder ein Drehstromsystem geeigneter Frequenz erzeugen. Asynchronmotoren sind so einfach aufgebaut, daß beim Ausfall fast immer der Kondensator für die Hilfsphase der Übeltäter ist. 4.6 Passive Zweipole und Vierpole 4.6.1 Einführung Wir haben bisher die Zusammenschaltung von Bauelementen im Wechselstromkreis mehr aus der Sicht des Energietechnikers betrachtet. Widerstände, Kondensatoren und Spulen wurden bei Gleichspannung oder Wechselspannung mit fester Frequenz betrachtet. Der Strom hat im Netz nur eine feste Frequenz (50 Hz in Europa), und den Energietechniker interessiert vor allem, wie viel Blindstrom er kompensieren muß. In der Nachrichtentechnik ist dieser Ansatz nicht mehr gerechtfertigt. Dort werden Bauelemente bei sehr unterschiedlichen Frequenzen eingesetzt. In der Nachrichtentechnik hat es sich eingebürgert, Bauelemente und Baugruppen als Zweipole und Vierpole zu klassifizieren. Dazu wird eine Schaltung als "Vierpol" oder "Zweitor" betrachtet. In 1 Zweipol Uin 1' 1 Uin In Iaus 2 Vierpol (Zweitor) Uaus 2' 1' Abb. 4.20: Zweipol und Vierpol Ein Zweipol oder Eintor ist ein Gebilde, das beim Anlegen einer Gleichspannung UL einen Strom IL fließen läßt. Die Abhängigkeit zwischen Strom und Spannung kann dabei fast beliebig komplex sein. Der Zweipol, auch als Eintor bezeichnet, ist durch die Abhängigkeit zwischen Strom und Spannung erschöpfend beschreibbar. 20 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Der Vierpol ist ein Gebilde, in dessen Eingang man beim Anlegen einer Eingangsspannung Uin und einen Eingangsstrom Iin hinein schickt. Am Ausgang erhält man entsprechend eine Ausgangsspannung Uaus und einen Ausgangsstrom Iaus. Hier muß man nicht nur die Abhängigkeit zwischen Strom und Spannung am Eingang beschreiben, sondern die wechselseitigen Abhängigkeiten zwischen Spannungen und Strömen an beiden Toren. Die Vierpoltheorie ist deshalb eine wichtige Grundlage der Nachrichtentechnik. Auch die in der Digitaltechnik verwendeten Grundbausteine lassen sich als Zweipole oder Vierpole beschreiben. Widerstände und Kondensatoren und Dioden sind Zweipole, dagegen sind Transistoren (auch wenn sie drei Beine haben) als Vierpole auffassbar und werden entsprechend ihres Eingangs / Ausgangsverhaltens charakterisiert. 4.6.2 Passive Zweipole Wir haben aber auch gelernt, daß Spule und Kondensator frequenzabhängige Impedanzen aufweisen, der "ideale" Widerstand dagegen von der Frequenz unabhängig ist. Für die Nachrichtentechnik bedeutet deshalb die Zusammenschaltung von Spulen, Kondensatoren und Widerständen, daß sich frequenzabhängige Übertragungseigenschaften ergeben. Reale Zweipole, also Spulen, Kondensatoren und Widerstände, sind stets nicht-ideal. Ihre Zweipolbeschreibung umfaßt immer auch parasitäre Elemente. R L Widerstand (gewickelter DrahtWiderstand) UL C IL Elektrolyt-Kondensator UL L R IL C R L Verlustbehaftete Spule mit Wicklungskapazität UL C IL Abb. 4.21: Ersatzschaltungen realer Zweipole Zunächst mal ist festzustellen, daß Widerstände, Induktivitäten und Kapazitäten fast stets in Kombination vorkommen, wobei die jeweils gewünschte Eigenschaft überwiegt. Widerstände für höhere Verlustleistungen werden häufig aus Draht gewickelt, sind also auch mit einer erheblichen Induktivität behaftet. Die Drahtzuleitungen von Widerständen, Spulen und Kondensatoren wirken stets als Induktivitäten. Zwischen den Windungen einer Spule existieren wiederum sogenannte Wicklungskapazitäten. 21 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Ein realer Zweipol ist also immer eine mehr oder weniger komplexe Zusammenschaltung dieser Grundelemente. Deshalb wollen wir für einige einfache aber typische Grundschaltungen untersuchen, wie sich diese in Abhängigkeit von der Frequenz der angelegten Wechselspannung verhalten. 4.6.3 Resonanz UL R C Parallel-Resonanzkreis L IL Serien-Resonanzkreis R L C UL IL Abb. 4.22: Serien- und Parallelresonanzkreis Die realen Zweipole haben alle Kombinationen aus Widerständen, Kapazitäten und Induktivitäten, die sich auf Parallel oder Serienschaltungen zurückführen lassen. Betrachten wir zunächst die Serienschaltung von R, L und C. Die Eingangsimpedanz dieser Schaltung ergibt sich zu: Zr = R + j ω L - j / ω C. Für ω = 0 wird der Betrag von Zr unendlich hoch, da die Kapazität sperrt. Die Eingangsimpedanz ist kapazitiv. Für ω gegen unendlich wird ebenfalls der Betrag von Zr unendlich hoch, da die Induktivität sperrt. Die Eingangsimpedanz ist induktiv. Dazwischen existiert der Fall, für den Zr = R wird und ωL = 1/ωC gilt. Die zugehörige Frequenz fr ist: fr = 1/2π (LC)1/2. Diese Frequenz wird als Resonanzfrequenz bezeichnet. Die Eingangsimpedanz nimmt ein Minimum an und wird real. 22 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Für Parallelschaltung gilt ein ganz ähnliches Verhalten: Die Eingangs-Admittanz ist Y = G + j ω C - j / ωL (G = 1 / R) Für w = 0 (Gleichstrom) wird Y unendlich, dementsprechend Z = 1 / Y zu null. Für w gegen unendlich wird Y ebenfalls unendlich und Z zu null. Dazwischen existiert eine Resonanzfrequenz, bei welcher die Eingangsadmittanz gleich G wird, der Eingangswiderstand also endlich und real. Im verlustlosen Resonanzkreis würde der Eingangswiderstand sogar unendlich hoch. Z Z R R f fr fr Serien-Resonanzkreis f Parallel-Resonanzkreis Abb. 4.23: Eingangsimpedanz von Schwingkreisen als Funktion der Frequenz In beiden Fällen liegt ein Resonanzphänomen vor, wie es auch aus der Mechanik bekannt ist. Schwingfähige Gebilde speichern im Fall der Resonanz eine große Menge Energie. Zur Aufrecherhaltung der Schwingung, das heißt zum Ausgleich der stets vorhandenen Verluste, genügt eine relativ kleine Energiemenge. Wichtig zu wissen ist, daß es bei solchen Kreisen das Phänomen der "Resonanzüberhöhung" gibt. Die sogenannte "Güte" eines Schwingkreises ist durch den Faktor r = ω0 L / R = (1/R) * (L / C) 1/2 gegeben. Dabei ist ω 0 = 1 / (LC) 1/2 die sogenannte Thomsonsche Schwingungsformel. Sie gibt die Resonanzfrequenz an. In einem Reihenschwingkreis wird die Teilspannung an der Spule bzw. am Kondensator r-mal höher als die Spannung der speisenden Quelle. Habe ich also z. B. eine Spannungsquelle von 10 V und eine Güte von 100 (durchaus real möglich), so erreicht die an den Teilelementen anliegende Spannung bis zu 1000 V ! In einem Parallelschwingkreis wird entsprechend der zwischen Kondensator und Spule "pendelnde" Strom um den Faktor r höher als der durch eine äußere Quelle eingespeiste Strom. Deshalb ist bei der Dimensionierung von Kondensatoren und Spulen in Schwingkreisen bezüglich ihrer Spannungsund Stromfestigkeit besondere Vorsicht geboten. Resonanzüberhöhungen in mechanischen Systemen (z. B. eine durch eine Marschkolonne in ihrer Eigenschwingfrequenz angeregte Brücke) können diese Bauwerke zerstören. 23 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 Schwingkreise haben in der analogen Nachrichten- und Hochfrequenztechnik eine große praktische Rolle, z. B. als Abstimmelemente in Sendern und Empfängern. Die Resonanzkurven werden um so höher und steiler, je kleiner der Serienwiderstand R und der Parallel-Leitwert G werden. In der Nachrichtentechnik wird die Bandbreite eines Schwingkreises, d. h. der Frequenzabstand, bei dem der Widerstand auf 1 / e des Spitzenwertes abgefallen ist, als Maß für die Güte definiert. Leider sind sie Schwingkreise kaum in integrierter Form herstellbar (da man in monolithisch integrierter Technik keine größeren und vor allem keine verlustarmen Induktivitäten darstellen kann). Dagegen kann man recht gut Quasi-Schwingkreise aus Leitungsbauelementen aufbauen (leerlaufende oder kurzgeschlossene Leitungen bestimmter Länge). Sogar eine geschlossene Blechdose kann als elektrisches Resonanzelement wirken ! Wie wir später bei den Vierpolen noch sehen werden, sind Zusammenschaltungen von Kondensatoren, Spulen und Widerständen von großer Bedeutung als frequenzabhängige Übertragungs-Netzwerke der Nachrichtentechnik. Schwingkreise haben in der analogen Nachrichten- und Hochfrequenztechnik eine große praktische Rolle, z. B. als Abstimmelemente in Sendern und Empfängern. Wie wir später bei den Vierpolen noch sehen werden, sind Zusammenschaltungen von Kondensatoren, Spulen und Widerständen von großer Bedeutung als frequenzabhängige Übertragungs-Netzwerke der Nachrichtentechnik. 4.6.4 Frequenzabhängige Netzwerke Wir haben oben gesehen, daß Netzwerke, die Widerstände, Kapazitäten und Induktivitäten beinhalten, eine frequenzabhängige Eingangsimpedanz haben. Generell werden nun Darstellungsweisen benötigt, welche diese Frequenzabhängigkeit anschaulich beschreiben. Als einfaches Beispiel sei eine Zusammenschaltung einer Kapazität mit einem Widerstand betrachtet, auch als RC-Glied bezeichnet. Die Ortskurve gibt die Impedanz (oder die Admittanz) des jeweiligen Bauelementes in der komplexen Ebene in Abhängigkeit von der Funktion an. X f = unendlich Z R R C f=0 Abb. 4.24: Ortskurve für die Eingangsimpedanz eines RC-Gliedes in der komplexen Ebene Hier dargestellt ist die Eingangsimpedanz einer Serienschaltung aus Kondensator und Widerstand. Bei sehr niedrigen Frequenzen sperrt der Kondensator, wir bekommen einen sehr hohen negativen Blindwiderstand. Bei sehr hohen Frequenzen dagegen wird die Kapazität gut leitend, die Impedanz ist ein durch den Widerstand R gegebener realer Wert. Einen etwas komplizierteren Verlauf hat die Ortskurve für einen Resonanzkreis (Abb. 4.25). 24 BTU Cottbus , LS TechInf, Informatik V/ 1, Kap. 4, WS98/99 X Z fr Rp C L Rp R Abb. 4.25: Ortskurve für einen RLC-Parallelschwingkreis Für Gleichspannung (f = 0) ist die Induktivität ideal leitend, für sehr hohe Frequenzen die Kapazität. Im Resonanzfall (f = fr) sperrt der Schwingkreis, der Eingangswiderstand ist deshalb gleich dem parallelen Widerstand Rp. Ortskurven sind also geeignet, einen guten groben Überblick über den Verlauf der Impedanz oder Admittanz über der Zeit zu geben. Praktisch viel wichtiger ist allerdings eine Möglichkeit, die Signalübetragungseigenschaften eines Netzwerkes beschreiben und charakterisieren zu können. 25