Regelschaltungen
Werbung

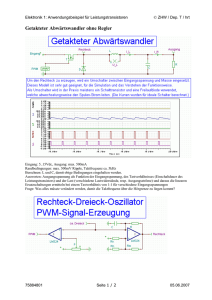
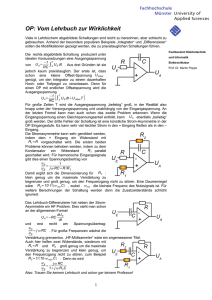
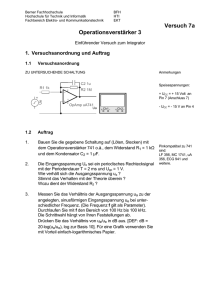
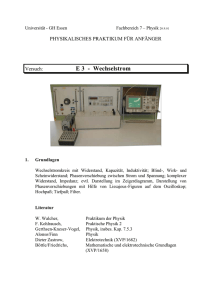
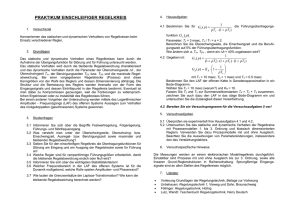
Mathias Arbeiter 09. Juni 2006 Betreuer: Herr Bojarski Regelschaltungen Sprungantwort und Verhalten von Regelstrecken Inhaltsverzeichnis 1 Sprungantwort von Reglern 1.1 Reglertypen . . . . . . . . 1.2 Proportional-(P)-Regler . 1.3 Intergral-(I)-Regler . . . . 1.4 PI-Regler . . . . . . . . . 1.5 Differential-(D)-Regler . . 1.6 PD-Regler . . . . . . . . . 1.7 PID-Regler . . . . . . . . . . . . . . . 3 3 3 4 4 5 6 6 2 Regelstrecke 2.0.1 Dimensionierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 7 3 PID-Regelstrecke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 1 1.1 Sprungantwort von Reglern Reglertypen Das zeitliche Verhalten der Stellgröße y nach dem Eintreten einer Störgröße z charakterisiert die Art der Regelung. Die Sprungantwort ist dabei die zeitliche Änderung der Stellgröße y bei sprungartiger Änderung der Regelabweichung xw . Die Regelabweichung ist dabei als Differenz zwischen Ist- und Soll-größe definiert: xw = xs − xi Man unterscheidet zwischen drei Typen: 1.2 Proportional-(P)-Regler P-Regler bewirken eine zur Regelabweichung proportionale Veränderung der Stellgröße. Sie reagieren damit sehr schnell auf eine Störgröße, verursachen aber eine bleibende Regelabweichung. Abbildung 1: Schaltbild: P-Regler Abbildung 2: P-Regler: oben: Eingangsspannung Rechtecksignal; unten: Sprungantwort 1.3 Intergral-(I)-Regler Beim I-Regler ist nicht die Stellgröße y, sondern die Stellgeschwindigkeit ẏ von der Regelabweichung abhängig. Solange ein xw = xs − xi vorhanden ist, wird somit die Stellgröße y verändert. Damit wird die Regelabweichung nach hinreichend langer Zeit Null werden. Allerdings reagiert der IRegler sehr langsam und seine Wirkung summiert sich erst mit der Zeit auf. Er besitzt im übertragenem Sinn ein Gedächtnis. Abbildung 3: Schaltbild: I-Regler Abbildung 4: I-Regler: oben: Eingangsspannung Rechtecksignal; unten: Sprungantwort Um die gewünschte Dreiecksspannung zu erhalten, muss noch ein Kondensator parallel geschaltet werden, der die Integrationskonstante beim Integrieren beeinflusst. 1.4 PI-Regler Vereinigt man die positiven Eigenschaften des I- und P-Reglers (also die Genauigkeit und Schnelligkeit), dann kommen wir zum PI-Regler. Er besteht aus einer Parallelschaltung von I- und P-Regler. Als Nachstellzeit bezeichnet man die Zeit, die der der I-Regler gebraucht hätte, um dieselbe Regelabweichung ohne P-Regler zu realisieren. Die Nachstellzeit ist somit die Zeit, die ein PI-Regler schneller ist, als ein einfacher I-Regler. Abbildung 5: Schaltbild: D-Regler Abbildung 6: PI-Regler: oben: Eingangsspannung Rechtecksignal; unten: Sprungantwort 1.5 Differential-(D)-Regler Beim D-Regler ist die Stellgröße y von der Änderungsgeschwindigkeit (Beschleunigung) der Regelabweichung xw = xs − xi abhängig. Auf eine lineare Änderung der Regelabweichung reagiert der D-Regler somit mit einer sprunghaften Änderung der STellgröße. Da auf konstante Regelabweichungen nicht reagiert wird, findet der D-Regler nur Anwendung in P- oder PI-Reglern. Abbildung 7: D-Regler: oben: Eingangsspannung Rechtecksignal; unten: Sprungantwort 1.6 PD-Regler Aus der Parallelschaltung von P- und D-Regler folgt der PD-Regler. Ändert sich ab der Zeit t0 die Regelabweichung linear steigend, so erzeugt der PD-Regler eine Stellgröße y, deren Graph , durch den D-Anteil eine parallel nach oben verschobene Gerade ist. tV wird dabei Vorhaltezeit genannt und ist die Zeit, die der P-Regler früher als t0 hätte reagieren müssen, um dieselbe Stellgröße zu erhalten. Da ein P-Regler im Spiel ist, wird die Regelabweichung nicht null. 1.7 PID-Regler P-, I- und D- Regler parallel geschaltet, ergeben einen PID-Regler. Er arbeit schnell und ohne bleibende Regelabweichung. Abbildung 8: PID-Regler: oben: Eingangsspannung Rechtecksignal; unten: Sprungantwort 2 Regelstrecke Die Regelstrecke wurde wie in Schaltung 9 aufgebaut. Abbildung 9: Schaltung einer Regelstrecke über den Photoeffekt Über UT r wird die Spannung an einer Glühlampe gesteuert. (Steuerung gelingt über einen Transistor). Diese Spannung UT r ist eine Rechteckspannung und sollte eine Frequenz von f = 0.4Hz nicht überschreiten. Über eine Photodiode wird am Widerstand R ein Strom induziert, so dass eine Spannung proportional zu diesem Strom an diesem Widerstand abfallen wird. Aufgrund der störenden Deckenbeleuchtung wird die gesamte Schaltung in einer photonen-sicheren Umgebung gelagert. Im Folgenden wurde dann das Übertragungsverhalten untersucht und in Abb. 12 dargestellt. Abbildung 10: Regelstrecke: oben: Eingangsspannung Rechtecksignal; unten: Ausgangsspannung des Reglers In Abb. 12 sieht man nun das Übertragungsverhältnis. Schaltet die Rechteckspannung und leuchtet somit die Lampe, so wird allmählich eine Ausgangsspannung gemessen. Offensichtlich erwärmt sich der Heizdraht der Glühlampe wesentlich langsamer, als er sich abkühlt, da die Ausgangsspannung beim Einschalten der Lampe im Vergleich zum Ausschaltvorgang relativ langsam reagiert. 2.0.1 Dimensionierung Im Folgenden muss nun der PID-Regler dimensioniert werden. Da die Regelstrecke eine bestimmte Verzugszeit und Übergangszeit besitzt, muss demzufolge der PID darüber informiert werden, indem er entsprechend dimensioniert wird. Die Ausgangsspannung beim Dimensionieren sollte ungefähr 3 V betragen, da im späteren Verlauf die Regelstrecke samt PID-Regler auch mit 3 Volt betrieben werden soll. Eingestellte Ausgangsspannung: Ua = 3.094V Zoomt man an Abb. 12 heran, so ergibt sich an der ansteigenden Flanke folgendes Bild: Abbildung 11: Regelstrecke: oben: Eingangsspanung; unten: Ausgangsspannung Der Anstieg der Tangente beträgt: ∆V Deltat 1.406V 152ms V 9.25 s m = = = Die Streckenverstärkung berechnet sich wiefolgt: Ua U0 Dabei ist Ua die p-p-Ausgangsspannung, theoretisch die Spannung, die sich nach unendlich langer Zeit einstellen würde. U0 ist die Spannung der positiven Halbwelle der Rechteckspannung, also einhalb der Peak-to-PeakMessung. Es ergibt sich: Vs = Vs = 3.094 3.906 Vs = 0.792 Anhand der Wendetangente sind folgende Zeitabschnitte abzulesen: Tu Tg = 463ms = 393ms Mithilfe dieser Angaben, lässt sich der PID dimensionieren. Dabei gilt: Vp = = 1 Tg · Vs Tu 1.608 1.5 · Weiterhin für den V-Kreis: = 0.5 · Tu = RTv · CTv = 232ms Tv Die Widerstände sind bereits auf der Platine gegeben. Sie betragen, wenn man sie voll aufdreht: ⇒ R = 100kΩ C = 2.32µF Die Kondensatoren werden parallel dazu geschaltet, um sie entsprechend zu erhöhen. Weiterhin: für den N-Kreis: = 2.0 · Tu = RTn · CTn = 926ms Tn Damit ergibt sich für: R = 150kΩ ⇒ C = 6.17µF Der Widerstand RV0 p ist gegeben durch: RV0 p = Re · Vp wobei Re der Vorwiderstand des I-Reglers ist und Re = 1kΩ beträgt: Damit ergibt sich: RV0 p = 1kΩ · 1.608 = 1608Ω Der Widerstand RVp berechnet sich wiefolgt: RVp = Re · Vp wobei Re der Vorwiderstand OV4 ist und Re = 10kΩ beträgt: Damit ergibt sich: RVp = 10kΩ · 1.608 = 16080Ω 3 PID-Regelstrecke Abbildung 12: Schema einer Regelstrecke Abbildung 13: Schaltung des Vergleichers und des PID-Reglers In Abb. 13 ist der PID-Regler zu sehen und (links davon) der OV 1 der als Vergleicher fungiert. Der OV 1 ist als Differenzverstärker geschaltet und bekommt als Eingangssignale die Soll- und IstSpannung, aus der er die Differenz ermittelt, verstärkt und dann in den PID-Regler eingespeist. Als Regelstrecke fungiert ein Aufbau, wie wir ihn schon in Abschnitt (2) verwendet haben. Diese Regelstrecke wird nun jedoch durch eine mit einer bestimmten Frequenz blinkenden Diode gestört. In Abb. 14 ist dieser Störsignal dargestellt. Diese Grafik wurde erstellt, ohne dass der PID-Regler in die Schaltung integriert wurde. Abbildung 14: ungeregelte Regelstrecke: oben: Eingangsspannung; unten: Ausgangsspannung Die Sollgröße kommt von einer Gleichspannungsquelle und sollte etwa 3 V betragen, da die Regelstrecke vorher mit ca. 3 V dimensioniert wurde. Wird der PID-Regler und der dafür nötige Differenzverstärker in die Schaltung integriert so ergibt sich ein Ausgangssignal wie in Abb. 15 dargestellt. Abbildung 15: PID Regelstrecke: oben: Eingangsspannung; unten: Ausgangsspannung Im Folgenden werden die Signale an verschiedenen Punkten der Schaltung gemessen: Die Regelabweichung wird im OV1 bestimmt und ist in Abb. 16 dargestellt. Abbildung 16: PID-Regler: oben: Eingangsspannung; unten: Signal Regelabweichung Man sieht in Abb. 16, dass der Differenzverstärker eine Spannungdifferenz zwischen Ist- und Sollwert anzeigt, die der eingespeisten Rechteckspannung entspricht. Der PID-Regler muss aus der Regelabweichung, also dem Signal vom Differenzverstärker nun die Stellgröße y erzeugen, die in die Regelstrecke eingespeist wird und die Störgröße kompensieren soll. Abbildung 17: PID-Regler: oben: Eingangsspannung; unten: Signal Stellgröße In Abb. 17 ist nun die Stellgröße dargestellt, die vom PID-Regler in die Regelstrecke eingespeist wird. Die Ausgangsspannung wird letztlich am Ausgang der Regelstrecke abgenommen und entspricht der Grafik Abbildung 15.