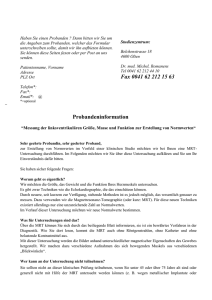
Unterschiede des Laufens mit einem Laufschuh
Werbung

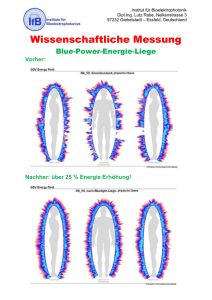
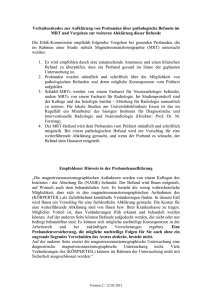
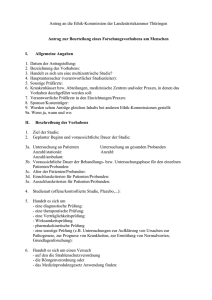
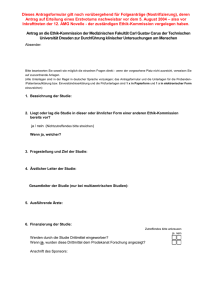
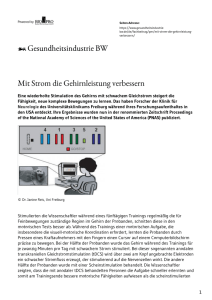
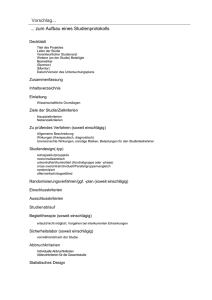
Unterschiede des Laufens mit einem Laufschuh gegenüber dem Barfußlaufen im Bezug auf die Belastung der Muskulatur zur Stabilisierung des Sprunggelenkes T. Reith1 , L. Ruff1 , P. Schrey1 , S. Sindinger1 , G. Sohlmann1 und P. Wittmann1 31. Mai 2014 1 FH Technikum Wien, Wien, AUT Zusammenfassung Der Laufsport zählt weltweit zu den beliebtesten Sportarten. Besonders der geringe Kostenaufwand und die einfache Durchführung machen diesen Sport einer großen Anzahl an Menschen zugängig. Seit einiger Zeit werden jedoch vermehrt kontroverse Diskussionen über das optimale Schuhwerk beim Laufen geführt. Die Meinungen der Wissenschaftler gehen auseinander, ob das Barfußlaufen oder ein Laufen mit einem Laufschuh gesünder ist. Eines der Hauptargumente für das Barfußlaufen ist das Training der Muskulatur, welche das Sprunggelenk stabilisiert. Beim Laufen mit Laufschuhen wird die Funktion der Stabilisation vom Schuh noch zusätzlich unterstützt. Dieses Projekt vergleicht daher die Aktivität der Muskulatur zur Stabilisierung des Fußes während des Barfußlaufens mit der beim Laufen mit Laufschuhen. Die Analyse der Bewegung wurde mit Hilfe der Elektromyographie durchgeführt, wobei hier die Aktivität des M. tibialis anterior und des M. peroneos longus gemessen wurde. Die Hypothese bestand darin, dass beim Barfußlauf eine höhere Aktivität der Muskulatur entsteht. Die Ergebnisse haben dies bestätigt, jedoch sind mehr Probanden notwendig, um eine allgemein gültige Aussage zu treffen. 1 Einleitung Wie in vielen Ländern zählt auch in Österreich das Laufen zu einer der beliebtesten Sportarten. 13 Prozent der Österreicher gehen mindestens einmal wöchentlich laufen (MarktforschungsgesmbH (2012)). Ein Grund für diese Popularität dieser Sportart ist vermutlich die einfache Ausführung, welche ohne außergewöhnliche technische Fähigkeiten möglich ist. Weiter kann ein Lauf nahezu überall durchgeführt werden, ohne dass der Sportler dazu spezielle Sportstätten aufsuchen muss. Beides ermöglicht einem Großteil der Menschen einen einfachen Zugang zu dieser Art der Bewegung, sodass es meist nicht mehr als ein passendes Schuhwerk sowie der Motivation sich zu Bewegen bedarf. Das Schuhwerk stellt somit häufig die einzig kostenintensive Anschaffung dar und soll den Fuß des Sportlers stabilisieren und schützen. Zahlreiche verschiedene Varianten von Laufschu- hen sollen es dem Sportler ermöglichen einen auf seine Laufgewohnheiten und körperlichen Voraussetzungen passenden Schuh zu finden. Bei pathologischen Fußfehlstellungen, wie beispielsweise einer erhöhten Pronationsstellung, sollen stützende Elemente im Schuh den Fuß beim Laufen wieder in eine physiologische Stellung bringen und somit vor allem Langzeitfolgen vermeiden. Weiter soll die Erhöhung der Ferse den Stoß bei jedem neuen Fersenkontakt dämpfen und das Abrollen des Fußes unterstützen. Diese Auswirkungen von Laufschuhen auf den physiologischen Lauf des Menschen werden in den letzen Jahren jedoch vermehrt diskutiert. Ein Anstoß für diese Diskussion stellt die fehlende Evidenz über diese positiven Effekte, die in kaum einer Studie bis jetzt belegt werden konnten. Hingegen konnte eine Studie erhöhte Drehkräfte auf die Gelenke der unteren Extremität beim Laufen mit Laufschuhen gegenüber Barfußlaufen aufzeigen (Kerrigan (2009)). Diese Erhöhung betrug in Knie und Hüfte über 30 Prozent und würde für eine erhöhte Belastung der Gelenke durch das Tragen von Laufschuhen sprechen. Vermehrt wird ebenfalls der durch den Laufschuh unterstützte fersenbetonte Laufstil diskutiert. Dies ist der bei den meisten übliche Laufstil, bei dem der Läufer beim ersten Bodenkontakt des Fußes (Initialkontakt) mit der Ferse aufkommt und anschließend über den ganzen Fuß abrollt(Abb.:1(a)). Bei einer Vorfuß betonten Art des Laufens, wie beim Sprinten und beim Barfußlaufen häufig zu beobachten, setzt der Läufer bereits beim Initialkontakt mit dem Vorfuß auf und nutzt die dämpfende Wirkung durch das Sprunggelenk(Abb.:1(b)). und Körperstellung(Götz (2008)). Eine Schwäche äußert sich durch Fußfehlstellungen, welche meist eine erhöhte Belastung der weiter kranial liegenden Gelenke mit sich führt. Aus diesem Grund ist eine gut trainierte Fußmuskulatur eine wichtige Voraussetzung für eine gesunde Körperhaltung und könnte ein positiver Effekt vom Barfußlaufen gegenüber dem Laufen mit Laufschuhen stellen. Dazu müsste jedoch eine erhöhte Anforderung an diese Muskulatur bedingt durch das Laufen ohne Schuhe gezeigt werden. In diesem Projekt soll daher die Aktivität der Muskulatur zur Stabilisierung des Fußes beim Laufen mit Laufschuhen und dem Barfußlaufen verglichen werden. Somit könnte diese Arbeit einen Beitrag zur Fragestellung, ob das Laufen mit oder ohne Laufschuhen gesünder ist, beitragen. 2 2.1 (a) Fersen- oder Rückfußlauf (b) Ballen- oder Vorfußlauf Abbildung 1: verschiedene Laufstile Dieser Bewegungsablauf entspricht dem eigentlich physiologischen Laufstil und stellt eine gesündere Art der Fortbewegung dar(Liebermann (2012)). All dies wirft nun die Frage auf, ob ein Laufen mit einem Laufschuh wirklich sinnvoller ist, als das Barfußlaufen. Die ersten Schuhhersteller reagieren auf diese Thematik mit sogenannten Barfußschuhen, welche durch eine dünne und flexible Sohle möglichst geringen Einfluss auf den natürlichen Fuß haben und somit dem Barfußlaufen sehr ähneln sollen. Neben dem Effekt eines durch diese Schuhe bewirkten natürlichen Laufstils auf dem Vorfuß wird vor allem mit einer vermehrten Aktivität der den Fuß stabilisierenden Muskulatur geworben, wie es auch beim Barfußlaufen der Fall sein soll (QUELLE UNTEN! (Vivobarefoot)). Während ein Laufschuh dem Fuß einen Großteil der Stabilisierung abnehmen soll, wird der Fuß beim Barfußlaufen gezwungen eben diese Muskulatur vermehr zu trainieren. Die Muskulatur des Sprunggelenkes stellt eine wichtige Voraussetzung für die Stabilität des Fußes und damit die Basis der physiologischen Bein- Methoden Versuchsanordnung Zur Analyse der Muskulatur, welche das obere Sprunggelenke (OSG) stabilisiert, wurden der M. peroneus longus und der M. tibialis anterior ausgewählt. Die Funktion des M.peroneus longus ist neben der dorsal Extension vor allem die Pronation im OSG. Der M.tibialis anterior bewirkt die plantare Flexion und die Supination und stellt somit den Antagonisten des M. peroneus longus. Beide Muskeln haben somit entscheidenden Anteil an der Stabilisierung des OSG. Aus diesem Grund wurden diese stellvertretend für alle an der Stabilisierung des OSG beteiligten Muskeln ausgewählt. Die Messungen wurden jeweils nur am rechten Bein der Probanden durchgeführt, da von einer nahezu gleichen muskulären Anspannung beider Beine bei einem physiologischen Laufstil ausgegangen wurde und eine beidbeinige Messung den Umfang dieses Projektes gesprengt hätte. Die Analyse der Bewegung wurde mit Hilfe der Elektromyographie (EMG) durchgeführt. Dazu wurden pro Messung jeweils fünf monopolare Oberflächenelektroden des Typs Ambu Blue Sensor P (Ambu A/S, Ballerup, Dänemark) verwendet. Die aufgenommenen Signale wurden mittels Differentialverstärker 1000fach verstärkt, ADgewandelt, durch eine Funksendeeinheit (Telemyo Bezeichnung Sex IV Radiotelemetry Transmitter, Neurodata, WiProband 1 male en, Österreich) mit 433[MHz] zur Empfangseinheit Proband 2 male (Telemyo IV Radiotelemetry System, Neurodata, Tabelle 1: Wien, Österreich) gesendet. Weiters wurden die Daten durch ein BNC-Interface (Neurodata, Wien, Österreich) an einen AD-Wandler (USB 6211, sen (Abb.: 3). National Instruments Corporation, Austin, USA) übermittelt und über eine USB-Schnittstelle mit dem PC verbunden. Die ermittelten Daten wurden mit dem Programm LabVIEW (National Instruments Corporation, Austin, USA) eingelesen und mit Hilfe von Matlab (MathWorks, Natick, USA) ausgewertet. (Abb.: 2) Alter 25 Jahre 21 Jahre Größe 1,80m 1,80m Trainingszustand Hobbyläufer Hobbyläufer Angaben zu den Probanden Abbildung 3: Applizierung der Elektroden, 1 = M. peroneus longus, 2 = M. tibialis anterior Abbildung 2: Messkette Die Durchführung der Messdurchgänge wurde mittels einer HTC-One mini Smartphonekamera (High Tech Computer Corporation, Taoyuan, Taiwan) gefilmt (Framerate 30fps). Um eine Synchronisation der Video- und Messdaten zu gewährleisten, wurde eine Schaltung mit Lichttrigger verwendet, welche im Signal eine steigende Flanke erzeugt. Jeweils zwei der fünf Oberflächenelektroden wurden nach Richtlinien des Seniam European Recommendations for Surface ElectroMyoGraphy (Hermens (1999)) um die Motor Points des M. tibialis anterior und des M. peroneus longus appliziert. Die fünfte Elektrode wurde am Vertebra prominens (C7) befestigt, da an dieser Stelle ein guter Kontakt zum Stützgewebe hergestellt werden kann, um das Nullpotential möglichst ungestört abnehmen zu können. Die Kabel wurden mit Klebeband so am Probanden befestigt, dass sie die Bewegung bei der Messdurchführung möglichst wenig beeinflus- Der Lauf wurde auf einem Laufband (Mercury, h/p/cosmos, Nussdorf-Traunstein, Deutschland) durchgeführt um eine einheitliche Geschwindigkeit der Probanden (Tab.: 1), sowie innerhalb der Messdurchläufe zu gewährleisten. Weiters wurden somit die äußeren Einflüsse möglichst weit minimiert, um eine Beeinflussung der Messung zu vermeiden. Um einen natürlichen Laufstil der jeweiligen Probanden zu gewährleisten sollte das Lauftempo einer für beide Probanden üblichen Geschwindigkeit entsprechen. Durch eine ungewohnte Geschwindigkeit würde es eventuell zu Abweichung vom normalen Laufstil und somit zu einer Beeinflussung der Messergebnisse führen. Dennoch sollte eine einheitliche Geschwindigkeit ausgewählt werden, um eventuelle Messunterschiede auf Grund von verschiedenen Geschwindigkeiten der jeweiligen Probanden auszuschließen. Beide Probanden sollten somit vor der eigentlichen Messdurchführung auf dem Laufband ohne jegliche Messapparatur laufen. Dabei wurde von einem Mitglied des Messteams die Geschwindigkeit stetig gesteigert und der Proband aufgefordert bei dem von ihm subjektiv als angenehm empfundenen Lauftempo ein Zeichen zu geben. Proband 1 wählte eine Geschwindigkeit von 7,4 km/h aus, während Proband 2 8,2 km/h wählte. Diese beiden Werte wurden gemittelt und damit eine Laufgeschwindigkeit von 7,8 km/h und keine Steigung ausgewählt. Die Messung an beiden Probanden wurde mit einem einheitlichen Laufschuh ASICS Typ T904N in der Größe 43,5(EUR) (ASICS Corporation, Köbe, Japan) durchgeführt, um Messunterschiede aufgrund von verschiedenem Schuhwerk zu vermeiden. Die Analyse des Laufstils mit Schuhen sollte anhand eines möglichst handelsüblichen Laufschuhes durchgeführt werden, weshalb dieses Schuhmodell gewählt wurde. 2.2 Versuchsdurchführung Vor der Durchführung auf dem Laufband wurde eine MVC-Normalisierung (Maximum Voluntary Contraction) beider zu messenden Muskeln durchgeführt um die später gemessenen Werte in Relation zu dem maximalen EMG-Signal setzen zu können. Dazu wurden beide Muskeln 3-5 Sekunden maximal willkürlich angespannt und ihr EMG-Signal gemessen. Um ein maximales Signal zu erhalten wurden die Probanden für die MVCNormalisierung des M. tibialis anterior aufgefordert diesen maximal in dorsal Extension und Pronation anzuspannen. Anschließend sollte der M.peroneus longus maximal in plantare Flexion und Supination angespannt werden (Abb.: 4). Dabei sind das Einhalten einer Mittelposition des Gelenksbewegungsbereiches sowie eine bestmögliche Fixierung aller involvierten Segmente wichtig. Die Widerstände wurden jeweils manuell durch ein Mitglied des Projektteams erbracht. Zum Start der Messung auf dem Laufband hatte jeder Proband eine zehn minütige Eingewöhnungsphase, um sich einzulaufen und aufzuwärmen, gefolgt von einer fünf minütigen Pause. Anschließend wurden drei Messdurchgänge mit jeweils 30 Schritten durchgeführt. Vor jeder Messung sollte sich der Proband eine Minute lang einlaufen, sodass der Proband das gewünschte Lauftempo und seinen physiologischen Laufstil eingenommen hat. Die er- Abbildung 4: MVC-Normalisierung M.peroneus longus sten drei Messdurchgänge erfolgten am Proband 1 mit Laufschuhen, gefolgt von Proband 2 mit Laufschuhen. Anschließend führte erst Proband 1 und dann danach Proband 2 die drei Messdurchgänge ohne Schuhe durch. 2.3 Versuchsauswertung Die Auswertung der Daten erfolgte mit Matlab. Das bipolare Signal wurde als erstes gleichgerichtet, um später Amplitudenparameter wie Mittelwert und Maximum berechnen zu können. Das EMG-Signal ist stochastischer Natur. Um die signalimmanente Variabilität zu minimieren, wurde eine digitale Glättung mittels Moving Average (Movag) der Fensterbreite 30ms durchgeführt, wodurch nicht reproduzierbare Amplitudenspitzen eliminiert werden. Die Glättung wurde forwardreverse durchgeführt, um eine Phasenverschiebung aufgrund des gleitenden Mittelwertes zu verhindern. Die Zyklustrennung erfolgte automatisiert mit Hilfe eines Matlabalgorithmus, wobei ein Zyklus als die Dauer von einem im Signal periodisch wiederkehrenden Minimum zum Darauffolgenden festgelegt wurde. Die einzelnen Zyklen wurden auf die gleiche Länge Interpoliert (Zeitnormalisiert), gemittelt und die jeweilige Standardabweichung berechnet. Informationen zu den Zeitpunkten des Heel Contact und Toe Off wurden durch die Inspektion des Videomaterials gewonnen. Zeitpunkte von jeweils 5 Schritten pro Messung wurden im Signal- verlauf der Average Rectified Values (AVR) markiert. Nach der Zyklentrennung und deren Zeitnormalisierung wurden die Zeitpunkte gemittelt und deren Standardabweichung gebildet. Als Referenzwert für die Amplitudennormalisierung, wurde die höchste Signalportion (Dauer 500ms) der MVCMessung gemittelt. Das Signal wurde anschließend in Bezug zu dem MVC-Wert gesetzt. Das Maximum der gemittelten Kurve und dessen Zeitpunkt sowie die gemittelten Zeitpunkte des Heel Contact und des Toe Off wurden tabellarisch festgehalten. 3 Ergebnisse Abb.: 5(a) zeigt den Aktivierungszustand vom M. peroneus longus des ersten Probanden während dem Laufen mit Laufschuhen (rot) und Barfuß (blau). Die gestrichelte grüne Linie bei 45% der Bewegung stellt den Zeitpunkt des Heel Contacts (Zeitpunkt der Berührung des Fersenbereichs des Schuhs mit dem Boden) dar und die Zweite den Toe Off (Zeitpunkt an dem der Zehenbereich des Schuhs den Boden verlässt). Beide Kurven beginnen bei einer Aktivierung von 3% der Maximalaktivierung. Diese verhalten sich bis zum Heel Contact simultan und steigen nicht über einen Wert von 7%. Beim Heel Contact steigt die Kurve des Laufschuhs stärker an und erreicht früher das Maximum von 70% bei 78% der Bewegung. Die rote Kurve fällt ebenso früher ab und ist bei 100% wieder auf dem Anfangswert. Die Kurve des Barfußlaufs erreicht das Maximum (73%) erst bei 81% der Bewegung und fällt bis zum Ende der Bewegung auf den Anfangswert zurück. jedoch früher das Maximum von 61% bei 80% der Bewegung. Die rote Kurve fällt früher ab und ist bei 100% wieder auf dem Anfangswert. Die Kurve des Barfußlaufs erreicht das Maximum (67%) erst bei 83% der Bewegung und fällt bis zum Ende der Bewegung auf den Anfangswert zurück. Abb.: 6(a) zeigt den Aktivierungszustand vom M. tibialis anterior des ersten Probanden während dem Laufen mit Laufschuhen (rot) und Barfuß (blau). Die gestrichelte grüne Linie bei 49% der Bewegung stellt den Zeitpunkt des Heel Contacts dar und die Zweite den Toe Off. Beide Kurven beginnen bei einer Aktivierung von 2% der Maximalaktivierung. Diese verhalten sich bis zum Heel Contact nahezu simultan. Sie steigen bis 25% der Bewegung auf einen Aktivierungszustand von 26% an und fallen bei 40% noch einmal auf einen Wert von 22% ab. Ab diesem Wert steigt die Kurve des Laufschuhs auf einen Wert von 65% bei 58% der Bewegung an und sinkt danach auf 15% ab (72% der Bewegung). Die Kurve des Barfußlaufs steigt etwas später auf sein Maximum von 66% bei 59% der Bewegung an und fällt danach ebenso wie die rote Kurve auf einen Wert von 15% ab (73% der Bewegung). Ab 70% der Bewegung verhalten sich beide Kurven nahezu gleich. Bis 80% steigen diese noch einmal auf 29% des Aktivierungszustand an (80% der Bewegung) und fallen bis zum Ende wieder auf den Anfangswert zurück. Abb.: 6(b) zeigt den Aktivierungszustand vom M. tibialis anterior des zweiten Probanden während dem Laufen mit Laufschuhen (rot) und Barfuß (blau). Die gestrichelte grüne Linie bei 45% der Bewegung stellt den Zeitpunkt des Heel Contacts dar und die Zweite den Toe Off. Beide Kurven beginnen bei einer Aktivierung von 3% der MaximalaktivieAbb.: 5(b) zeigt den Aktivierungszustand vom M. rung. Bis zum Heel Contact steigt die rote Kurve peroneus longus des zweiten Probanden während auf ein lokales Maximum von 31% bei 21% der Bedem Laufen mit Laufschuhen (rot) und Barfuß wegung und fällt danach auf 15% zurück (40% der (blau). Die gestrichelte grüne Linie bei 44% der Be- Bewegung). Die blaue Kurve steigt nicht so stark wegung stellt den Zeitpunkt des Heel Contacts dar und besitzt ihr lokales Maximum (28%) ebenso bei und die Zweite den Toe Off. Beide Kurven beginnen 21% der Bewegung. Bis zum Heel Contact geht die bei einer Aktivierung von 5% der Maximalaktivie- Aktivierung jedoch noch weiter zurück (12% der rung. Diese verhalten sich bis zum Heel Contact Maximalaktivierung). Nach dem Heel Contact ernahezu simultan, wobei beim Barfußlauf hier ein reicht die rote Kurve ihr absolutes Maximum (43%) höherer Wert von 13% erreicht wird, während die bei 56% der Bewegung. Ab diesem Punkt sinkt die Kurve des Laufschuhs hier nur bis 11% der Maxi- Aktivierung auf 16% und hält sich dort im Zeitmalaktivierung geht. Beim Heel Contact steigt die raum von 68% bis 82% der Bewegung. Am Ende Kurve des Laufschuhs etwas schwächer an, erreicht fällt die Kurve auf den Anfangswert zurück. Die (a) Proband 1 (b) Proband 2 Abbildung 5: Verlauf des Musculus peroneus longus während eines Zyklus. Die rote Linie zeigt den Verlauf des Muskels während des Laufens mit Laufschuhen und die Blaue während des Barfußlaufens. Die erste grün strichlierte Linie zeigt den Zeitpunkt des Hell Contacts und die Zweite des Toe Offs. (a) Proband 1 (b) Proband 2 Abbildung 6: Verlauf des Musculus tibialis anterior während eines Zyklus. Die rote Linie zeigt den Verlauf des Muskels während des Laufens mit Laufschuhen und die Blaue während des Barfußlaufens. Die erste grün strichlierte Linie zeigt den Zeitpunkt des Hell Contacts und die Zweite des Toe Offs. blaue Kurve steigt ab dem Heel Contact auf ein absolutes Maximum von 61% bei 61% der Bewegung. Der Aktivierungszustand reduziert sich danach auf 12% und verharrt dort von 73% bis 87% der Bewegung. Bis zum Ende fällt die Aktivierung auf den Anfangswertzurück. Abbildung 8: Leistungen (inkl. Standardabeichungen) der gemessenen Muskeln beider Probanden während des Laufens mit Laufschuhen, bzw. Barfuß 4 Abbildung 7: Muskelaktivitäten (inkl. Standardabweichungen) beider Probanden Abb.: 7 stellt die verschiedenen Muskelaktivitäten während dem Laufen bezogen auf den Maximalaktivierungszustand dar. Aufgeteilt ist das Diagramm in jeweils vier Balken zu Proband 1 und Proband 2. Diese vier Balken werden dann jeweils noch in die Aktivität des M. peroneus longus (links: Laufschuh; rechts: Barfuß) und des M. tibialis anterior (links:Laufschuh, rechts: Barfuß) aufgeteilt. Die schwarzen Striche stellen die Standardabweichung dar. Es ist zu erkennen, dass die Muskelaktivität beim Barfußlauf stets größer ist, wie die des Laufens mit dem Laufschuh. Abb.: 8 zeigt die Leistung der gemessenen Muskeln während des Laufens mit Laufschuhen, bzw. Barfuß. Es sind nahezu die gleichen Werte zwischen Laufschuh- und Barfußlaufens zu erkennen. Leichte Unterschiede gibt es beim Probanden 1 beim M. tibialis anterior und beim Probanden 2 beim M. peroneus longus da diese beim Barfußlauf etwas mehr Leistung verrichten. Diskussion Unsere Hypothese, dass die Muskelaktivität beim Barfußlaufen höher ist als beim Laufen mit Laufschuh konnte durch die Auswertung bestätigt werden. Beim Musculus peroneus longus und beim Musculus tibialis anterior des ersten Probanden ist die Muskelaktivität beim Barfußlauf um ca. 2-3% höher als beim Laufen mit Laufschuh. Dies könnte wie erwartet dadurch zustande kommen, dass der Laufschuh Dämpfungseigenschaften und Stabilisationseigenschaften der Muskeln unterstützt und somit entlastet. Beim zweiten Probanden liegt die Muskelaktivität beim Musculus peroneus longus beim Barfußlauf um ca. 5% höher als beim Laufen mit Laufschuh. Die Muskelaktivität des Musculus tibialis anterior liegt allerdings um 20% höher, dass möglicherweise auf Messungenauigkeiten zurückzuführen ist. Der Heel Contact ist beim Musculus peroneus longus bei ca. 45% der Bewegung und danach beginnt der eigentliche Arbeitsbereich des Muskels bis zum Toe Off bei ca.95% der Bewegung. In der Schwungphase hat der Musculus peroneus longus keine Stabilisationsarbeit, sondern nur in der Standphase, da er hierbei im Sprunggelenk stabilisieren muss. Der Heel Contact beim Musculus tibialis anterior liegt bei ca. 47% der Bewegung, der Toeoff bei ca. 95%. Der Musculus tibialis anterior arbeitet sowohl in der Schwungphase, als auch in der Standphase. In der Schwungphase muss er den Fuß nach vorne führen und ist dadurch aktiviert. In der Standphase ist er gemeinsam mit dem Musculus peroneus longus an der Stabilisation des Sprunggelenks beteiligt. Um den automatisierten Ablauf der Auswertung sowie die Qualität der Ergebnisse in zukünftigen Versuchen zu steigern, kann die Trennung der Zyklen optimiert werden. In diesem Fall wurden die Zeitpunkte für die einzelnen Zyklen mit einem auf Amplitudenparametern des EMG-Signals basierendem Algorithmus durchgeführt. Hierbei kann es aufgrund der stochastischen Charakteristik des EMG-Signals zu Problemen bzw. Ungenauigkeiten kommen. Weitere Ungenauigkeiten können bei der Detektion des Heel Contact (HC) und Toe Off (TO), durch die relativ geringe Framerate der Kamera im Vergleich zur Hohen Aufnahmefrequenz der des EMG-Systems entstanden sein. Durch die Zeitnormalisierung unterschiedlich langer Zyklen kann es ebenfalls zu einer Abweichung der im Signal markierten Zeitpunkte gekommen sein. Der Automatisierungsgrad der Erhebung von HC und TO kann ebenfalls verbessert werden: Ein Pattern-Matching Algorithmus wurde in Erwägung gezogen, schlussendlich aber aufgrund von Instabilität und minderer Qualität der Kamera nicht umgesetzt. Deswegen wurden Zeitpunkte in diesem Versuch manuell dem Videomaterial entnommen. Da es zu zeitkonsumierend gewesen wäre, dies bei allen Zyklen durchzuführen, wurde aus jeweils 15 Zyklen (von 90 Zyklen) der mittlere Zeitpunkt errechnet. Aufgrund des geringen Stichprobenumfangs, Abweichungen durch Interpolation sowie durch die geringe Framerate der Kamera, ist der errechnete Wert nur als grober Anhaltspunkt zum Zeitpunkt von HC und TO zu sehen. Durch die Verwendung einer Kamera mit höherer Framerate und der Applikation von Markern an Ferse und Zehen des Probanden, kann die Auswertung der Ergebnisse erheblich verbessert werden. Mittels Bewegungsanalysesoftware oder Matlab Trackingalgorithmen könnten Initial Contact und TO bestimmt und direkt als Referenzpunkte für die Trennung der Zyklen (Schritte) dienen. Als Erweiterung hätte man Elektroden an beiden Beinen anbringen können, um Unterschiede zwischen linkem und rechtem Bein herauszufinden, sowie eine Vermessung von mehreren Probanden, um die Vergleichbarkeit zu verbessern und mögliche Messfehler zu reduzieren. Literatur Götz, M. (2008). Aufrecht durch das leben - die füße als basis unserer haltung und bewegung. Hermens (1999). Seniam European Recommendations for Surface ElectroMyoGraphy. Kerrigan, D. (2009). The effect of running shoes on lower extremity joint torques. Liebermann, D. (2012). Foot strike patterns and collision forces in habitually barefoot versus shod runners. MarktforschungsgesmbH, S. (2012). Laufen und nordic walking: Beeindruckende konstanz über viele jahre.