Ausarbeitung Regelungstechnik
Werbung

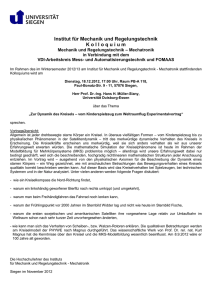
Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 Ausarbeitung Regelungstechnik by Poth & Fiechtner © 2005 by Poth & Fiechtner Seite 1/14 Poth, Fiechtner Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 Inhalt Grundsätzliches zur Rege- Was ist die Aufgabe einer Regelung?, Wie arbeitet eine Regelung grundsätzlich?, Warum findet man lungstechnik Seite 3 Untersuchung des als Regelstrecke verwendeten Heizlüfters Seite 4 Seite 5 Regelkreis als Blockschaltbild, Auswahl des geeigneten Reglers Regelung mit einem 2Punkt-Regler Regelung mit einem P/PI/PID-Regler Optimierung des PIDReglers Verhalten bei Änderung der Einstellgrößen Regelungen in so vielen Bereichen?,... Aufbau der Schaltung, Diagramm: Sprungantwort Um welche Regelstrecke handelt es sich?, Was sind die Kenngrößen dieses Reglerstreckentyps?, Was ist der Wert für die Kenngröße Regelbarkeit?,... Diagramm: PT2 Regelstrecke Aufbau der Schaltung, Diagramm Aufbau der Schaltung, Diagramme der Regler Aufgaben der einzelnen Regler (P, I, D) Berechnen der Optimalen Einstellungen, Diagramm Tabelle mit verschiedenen Einstellungen und den Auswirkungen Zwei Beispieldiagramme zu Optimierungen Seite 2/14 Seite 6 Seite 7-8 Seite 9-10 Seite 11 Seite 12 Seite 13 Seite 14 Poth, Fiechtner Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 Grundsätzliches zur Regelungstechnik Was ist die Aufgabe einer Regelung? Die Aufgabe einer Regelung ist es, eine physikalische Größe (z. B. Temperatur, Druck, Füllstand oder Spannung) auf einen vorgegebenen Wert zu bringen und sie auch bei Störeinflüssen auf diesem Wert zu halten. Wie arbeitet eine Regelung grundsätzlich? Eine Regelung ist ein geschlossener Wirkungskreis. Die Regelgröße wird gemessen und wird mit der Führungsgröße (Vorgabe) verglichen. Das Ergebnis des Vergleichs, die Regeldifferenz, wird vom Regler verarbeitet und als geänderte Stellgröße an den Eingang der Regelstrecke zurückgeführt. Warum findet man Regelungen in so vielen Bereichen? Da die Ansprüche an Komfort, Umweltschutz, Rohstoffeinsparung, Sicherheit, usw. sowohl von Privatleuten als auch der Industrie steigen und die meisten dieser Anforderungen nur mit einer gut funktionierenden Regelung zu erreichen sind. Welche Geräte und Anlagen finden sich in der beruflichen Praxis, im öffentlichem und Privatem Bereich die nach dem Heizlüfter Prinzip arbeiten? - Klimaautomatik im Auto - Generatorendrehzahl in Kraftwerken - Motordrehzahl in Maschinen - Fahrassistenzsysteme in Fahrzeugen - Backofenheizungen - Konstantspannungsnetzteile - Lüfterregelung im PC Seite 3/14 Poth, Fiechtner Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 Untersuchung des als Regelstrecke verwendeten Heizlüfters Bild: Aufbau der Schaltung Bild: Temperatur, Sprungantwort Seite 4/14 Poth, Fiechtner Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 Um welche Regelstrecke handelt es sich? Um eine PT2 Regelstrecke, da die Strecke zwei Zeiten hat (Eine Verzugszeit und eine Ausgleichszeit). Was sind die Kenngrößen dieses Reglerstreckentyps? Tu = Verzugszeit Tg = Ausgleichszeit Δx = Änderung der Temperatur Δy = Änderung der Eingangsspannung Was ist der Wert für die Kenngröße Regelbarkeit? Tg Tg # 10 ! gut regelbar; " 3 ! schlecht regelbar Tu Tu 60 ! 6, 6 ! mäßig regelbar 9 Welche Aussage über die Regelbarkeit kann für diesen Heizlüfter als Regelstrecke getroffen werden? Der Heizlüfter ist mäßig regelbar. Bild: PT2 Regelstrecke Proportionalbeiwert der Regelstrecke (Ks): K s = Seite 5/14 "x 66 ! = 6,6 "y 10 Poth, Fiechtner Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 Regelkreis als Blockschaltbild w Führungsgröße (Sollwert) e error (Differenz zwischen x und w) y1 Stellgröße (Verstärkt) y2 Stellgröße X Regelgröße (Ist-Wert) xr, r Rückgeführte Regelgröße xi Regelgröße Ist-Zustand Auswahl des geeigneten Reglers für die Regelstrecke Laut Tabellenbuch S.302 (Eignung von Reglern bei gegebener Strecke) eignet sich für eine PT2 Strecke ein - PI Regler gut. - PID Regler sehr gut. - 2-Punkt-Regler gut. Seite 6/14 Poth, Fiechtner Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 Regelung mit einem 2-Punkt-Regler Bild: Aufbau des 2-Punkt-Reglers Bild: Messdiagramm 2-Punkt-Regler Seite 7/14 Poth, Fiechtner Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 2-Punkt-Regler Seite 8/14 Poth, Fiechtner Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 Regelung mit einem P/PI/PID-Regler Bild: Aufbau des P/PI/PID-Reglers Bild: Diagramm des P-Reglers Seite 9/14 Poth, Fiechtner Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 Bild: Diagramm des PI-Reglers Bild: Diagramm des PID-Reglers Seite 10/14 Poth, Fiechtner Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 Der PID Regler P-Anteil: I-Anteil: D-Anteil: Der P-Anteil ist der proportionale Anteil der Stellgröße. Er dient als Vorhalte-Anteil und erreicht den Sollwert alleine nicht (bleibende Regelabweichung). Die Änderung der Stellgröße Δy verhält sich direkt Proportional zur Änderung der Regeldifferenz e. Als Proportionalbereich (Xp) bezeichnet man den Bereich innerhalb dem der Ist-Wert schwingt. Mit Hilfe des Proportionalbeiwerts (Kp) kann der Proportionalbereich bestimmt werden. Der P-Anteil ist sehr schnell aber er kann Störungen nicht so weit ausregeln, dass die Regelgröße den Sollwert erreicht. Der Integral Anteil sorgt für die Erreichung des Sollwerts und hat keine bleibende Regeldifferenz. Der I-Regler ist langsam und die Zeit die er braucht um nach einer Sprungfunktion in der Antwortfunktion den selben Wert zu erreichen nennt man Nachstellzeit (Tn). Der Differenzielle Regler kann keine Störungen alleine ausregeln. Ändert sich e Sprunghaft geht die Stellgröße auf den Maximalwert und geht sofort wieder auf Null zurück wenn sich e nicht mehr ändert. Wenn sich e stetig ändert bleibt die Stellgröße auf ihrem Maximalwert. Seite 11/14 Poth, Fiechtner Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 Optimierung des PID-Reglers Optimierung für: Optimales Verhalten bei Störungen und 20% zulässigem Überschwingen der Regelgröße. Bisherige Einstellungen: Kp 20 Tn 80s Tv 1s Verfahren nach Fachbuch (S. 520) Proportionalbeiwert der Regelstrecke (Ks): K s = K P = 1,2 ! "x 66 ! = 6,6 "y 10 1 Tg 1 60 ! " 1,2 ! ! = 1, 21 K S Tu 6,6 9 Tn = 2 ! Tu " 2 ! 9 = 18 Tv = 0,42 ! Tu " 0,42 ! 9 = 3,78 Bild: Regelung nach der Optimierung Seite 12/14 Poth, Fiechtner Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 Verhalten bei Änderung der Einstellgrößen Standarteinstellungen: Kp 20 Tn 80s Tv 1s Änderung Reglertyp Verkleinern der 2-Punkt Hysterese Regler Auswirkung Häufigere Ein und Ausschaltvorgänge, größerer Verschleiß von Komponenten (Schützen etc.), geringerer Toleranzbereich. Vergrößern der 2-Punkt Seltene Ein und Ausschaltvorgänge, geringerer VerHysterese Regler schleiß von Komponenten (Schützen etc.), großer Toleranzbereich Kp auf 40 er- P-Regler Der Regler reagiert stärker (schneller) auf Änderungen höhen von e (also auf Abweichungen vom Soll-Wert) und der Regler Pendelt sich später ein. Kp auf 5 ver- P-Regler Der Regler reagiert träge auf Änderungen von e und er ringern Pendelt sich schnell ein. Der Soll Wert wird weit unterschritten. Tn auf 40s ver- PI-Regler Der Regler erreicht den Sollwert früher, schwingt jeringern doch stärker über die Führungsgröße und schwingt länger nach. Tn auf 20s ver- PI-Regler Der Regler erreicht den Sollwert bereits nach 30s, ringern schwingt jedoch sehr stark über die Führungsgröße und pendelt sich kaum aus, verhält sich also fast wie ein Zwei-Punkt-Regler – er läuft also an seiner Stabilitätsgrenze. Tn auf 100s PI-Regler Der Sollwert wird später erreicht. Der Regler reagiert erhöhen etwas träger. Tv auf 2s er- PID-Regler Der Sollwert wird etwas früher erreicht und auf Ändehöhen rungen von e wird stärker reagiert. Tv auf 2s er- PID-Regler Der Sollwert wird früher erreicht, und der Soll-Wert höhen, Tn auf wird nicht überstiegen, bei Änderungen von w reagiert 40s verringern der Regler sehr stark und w wird leicht überstiegen. Tv auf 3s er- PID-Regler Der Sollwert wird etwas später erreicht als bei Tv = 2s, höhen, Tn auf bei Änderungen von w wird w allerdings nicht so stark 40s verringern überschritten. Seite 13/14 Poth, Fiechtner Ausarbeitung, Regelungstechnik Stand: 29.10.2006 10:10 Optimierungen im Vergleich Bild: PID-Regelung mit Kp = 20, Tv = 3s, Tn = 40s Bild: PI-Regler mit Tn = 20s: Der Regler läuft an seiner Stabilitätsgrenze Seite 14/14 Poth, Fiechtner