auftreten corioliskraft
Werbung

Experimentalphysik E1
13. Nov.
Scheinkräfte
Alle Informationen zur Vorlesung unter :
http://www.physik.lmu.de/lehre/vorlesungen/index.html
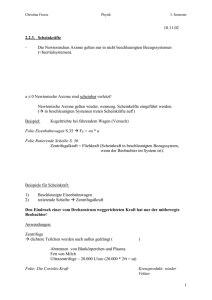
Die Newtonschen Grundgesetze
1. Newtonsche Axiom (Trägheitsprinzip)
Ein Körper verharrt im Zustand der Ruhe oder der gleichförmigen
geradlinigen Bewegung, solange keine Kraft auf ihn wirkt.
2. Newtonsche Axiom (Aktionsprinzip)
Ursache für eine Bewegungsänderung ist eine Kraft. Sie ist definiert als
F = m⋅a
[N=kg·m/s2= 1 Newton]
m : „träge Masse“
3. Newtonsche Axiom (Reaktionsprinzip)
Bei zwei Körpern, die nur miteinander, aber nicht mit anderen Körpern
wechselwirken, ist die Kraft F12 auf den einen Körper entgegengesetzt
gleich der Kraft F21 auf den anderen Körper.
F12
= −
F21
(actio=reactio)
Bewegte Bezugssysteme
Wann und Wo sind die Newtonschen Gesetze gültig ?
Gelten Sie in allen Bezugssystemen ?
1.NG F=0 => gleichf. Bew.
2.NG F=ma
(wobei F bekannte Kräfte sind)
v
v=0
Inertialsysteme sind Bezugssysteme in denen das Newtonsche
Trägheitsgesetz gilt.
Bezugssysteme die sich relativ zueinander mit der konstanter
Geschwindigkeit bewegen sind äquivalent
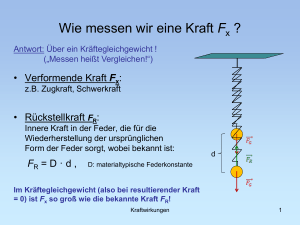
Beschleunigte Bezugssysteme
Beobachter im Wagen:
-Eine Kraft zieht die Kugel
plötzlich nach hinten.
Beobachter außerhalb:
-Wagen wird beschleunigt,
daher Zugkraft auf Feder.
Ftr
a
Im beschleunigten Bezugssystem tritt Beschleunigung von Massen
ohne erkennbare Ursache auf. Als Ursache werden Scheinkräfte
eingeführt. Scheinkräfte sind Trägheitskräfte, welche von
mitbewegten Beobachtern in beschleunigten Bezugssystemen
beobachtet werden.
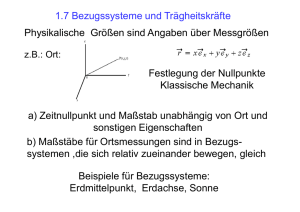
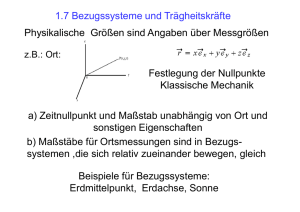
§3 Bewegte Bezugssysteme
§3.1 Relativbewegung
z
rA
€
€
A
Relativkoordinate:
rB
€
x
€
rAB
B
y
€
€
€
Relativgeschwindigkeit:
€
€
€
€
rAB = rA − rB
d rB
d rA
vA =
; vB =
dt
dt
d rAB
v AB =
= vA − vB
€ dt
v BA = v B − v A = −v AB
§3.2 Inertialsysteme
z"
r" = r − u ⋅ t
A
z
r = { x, y,z}
€
€
x
€
€
r" = { x ", y ", z"} % x "(t) = x(t) − ux ⋅ t )
€
'
'
€ O‘
"
' y (t) = y(t) − uy ⋅ t '
u⋅ t
y" €
&
*
x"
z"(t) = z(t) − uz ⋅ t '
'
O
€
€y
'
'
€
t" = t
(
+
O‘
bewege
sich
mit
konstanter
€
u << c
€ O
Geschwindigkeit
u
bezüglich
€
€
dr dr "
v=
v" =
dt
dt
è v " = v − u€
Zwischen den in den beiden Inertialsystemen O und O‘ €
gemessenen Grössen
für
€ die Bewegung des Massenpunktes A
gelten die Galilei-Transformationen
u=const
è
dv " dv
a" =
=
=a
dt
dt
r = r " + ut
v = v " + u ⇒ a = a" und F = F "
€
t = t"
Beide Beobachter kommen in Inertialsystemenzu
den gleichen physikalischen Gesetzenz.B. freier Fall
h
€
€
z
1 2
z = h − gt
2
x = u ⋅t
h
A
x
€
€
1 2
z" = h − gt
2
x" = 0
z‘
A
u
Inertialsysteme sind für die Beschreibung physikalischer Gesetze
äquivalent
€
x‘
§ 3.3 Beschleunigte Bezugssysteme
Bsp.: Geradlinig beschleunigte
Bezugssysteme
z
S
y
€
z"
r
€
€
€ €
r"
€
€
x
S"
y"
€
€
a = du dt
x"
x (0"( t )) = €u0 t + 12 at€2
€
€
€
A
x = x " + u0 t + 12 at 2
y = y"
z = z"
t = t"
O‘ kein Inertialsystem!
Auftreten von
Scheinkräften!!
Bsp.:
Fahrstuhlexperim
ente
Scheinkräfte im beschleunigten
Fahrstuhl
Bsp.: Rotierende Bezugssysteme
ω
eˆz r = r "
eˆ!z
€
€
€
O=O‘
€
€eˆx
eˆx"
€
€
€
x −€
y − Ebene
€€
A
z"
eˆy" y " z
eˆy y
€
x"
x
x" − €
y" − Ebene
€
r (t ) = x (t ) ⋅ êx + y (t ) ⋅ êy + z (t ) ⋅ êz
dx
dy
dz
v (t ) =
⋅ êx +
⋅ êy +
⋅ êz
dt
dt
dt
Der Beobachter im rotierenden
System O‘ beschreibt A:
dr! dx!
dy!
dz!
v! (t ) = = ⋅ eˆ!x + ⋅ eˆ!y + ⋅ eˆ!z
dt dt
dt
dt
r! (t ) = r (t ) = x! (t ) ⋅ eˆ!x + y! (t ) ⋅ eˆ!y + z! (t ) ⋅ eˆ!z
Für den€Beobachter im ruhenden System O ändern sich auch die Einheitsvektoren
des Rotienrenden Systems. deˆ!y
# dx!
deˆ!z &
dy!
dz! & # deˆ!x
v ( x!, y!, z!) = %
⋅ eˆ!x +
⋅ eˆ!y +
⋅ eˆ!z ( + % x!
+ y!
+ z!
( = v! + u
$ dt
' $ dt
dt
dt
dt
dt '
Die Endpunkte der Einheitsvektoren im rotierenden System beschreiben Kreisbahnen:
ˆ
ˆ
=> u = (ω × e"x ) x" + (ω × e"y ) y" + (ω × eˆ"z ) z"
= ω × (eˆx$ x $ + eˆy$ y $ + eˆz$z$)
$
=ω × r =ω×r
€
weilr ≡ r #
v€= v " + (ω × r )
€
€
€
€
€
Geschwindigkeit im rotierenden
System
Geschwindigkeit
im ruhenden
System
€
deˆx"
= ω × eˆx"
dt
deˆy"
= ω × eˆy"
dt
deˆz"
= ω × eˆz"
dt
Für ω = const:
%
dv dv "
dr (
a=
=
+ 'ω × *
dt
dt &
dt )
#
dv y"
dv z" & # deˆx" deˆy" deˆz" &
dv "
dv x"
"
= %eˆx"
+ eˆy"
+ eˆz"
v x" +
v y" +
v z" ( = a + (ω × v ")
(+%
dt $ dt
dt
dt
dt '
€ dt ' $ dt
dv
€
a=
= a" + (ω × v ") + (ω × v )
dt
"
"
a = a + 2(ω × v ) + ω × (ω × r )
a " = a + 2 (v " × ω ) + ω × ( r × ω )
€
Der Beobachter in O‘ muss zur
€
a" = a + ac + azf
Beschrei-bung der Bewegung von
A zusätzliche
€
Beschleunigungsterme einführen!
€
Zentrifugalbeschleu
Coriolisbeschleunigung
nigung
Aus den Beschleunigungen
folgern Scheinkräfte auf die
Masse m in A
€
ac = 2(v " × ω )
Fc = 2m(v " × ω )
azf = ω × ( r × ω ) Fzf = m ⋅ ω × ( r × ω )
€
Scheinkräfte treten auf, wenn die
Bewegung im rotieren
€
€
Koordinatensystem beschrieben
wird, und die Roation des
Koordinaten-systems nicht
berücksichtigt wird. Bei der
Beschreibung in einem
Inertialsystem treten diese Kräfte
nicht auf!
Aus den Beschleunigungen
folgern Scheinkräfte auf die
Masse m in A
ac = 2(v " × ω )
Fc = 2m(v " × ω )
azf = ω × ( r × ω ) Fzf = m ⋅ ω × ( r × ω )
€
€
Scheinkräfte treten auf, wenn die
Bewegung im rotieren
€
€
Koordinatensystem beschrieben
wird, und die Roation des
€
Koordinaten-systems nicht
berücksichtigt wird. Bei der
€
Beschreibung in einem
Inertialsystem treten diese Kräfte
x"
nicht auf!
€
€
€
€
z" = z
ω
r
v⊥
A
ax"c €
€ azf
ay"c a
c €
€
€
€ €
v
v
y"
Aus den Beschleunigungen
folgern Scheinkräfte auf die
Masse m in A
ac = 2(v " × ω )
Fc = 2m(v " × ω )
azf = ω × ( r × ω ) Fzf = m ⋅ ω × ( r × ω )
€ auf, wenn die Bewegung
€
Scheinkräfte treten
im rotieren Koordinatensystem beschrieben
wird, und die Roation
€ des Koordinaten- €
systems nicht berücksichtigt wird. Bei der
Beschreibung in einem Inertialsystem treten
diese Kräfte nicht auf!
Zentrifugalkraft steht senkrecht auf ω Corioliskraft steht ebenfalls
senkrecht auf ω, tritt aber
nur auf, wenn v‘ eine
Komponente senkrecht zu
ω hat.
z" = z
ω
€
r A
€
x"
€
€
€
v"
azf
ac
€
y"
Rotierendes Bezugssystem => Trägheitskräfte
ω
S
FZ
m
v
FC
S‘
ω : Winkelgeschwindigkeit
r : Bahnvektor
: Bahngeschwindigkeit
v
m
: Masse
v
r
F = F ! − 2m (ω × v!) − m ω × (ω × r!)
F = F ! + 2m ( v! × ω ) + m ω × ( r! × ω )
FC = 2mω v sin(ω, v)
Corioliskraft
Fzf = m ⋅ r⊥ω 2
Zentrifugalkraft
Die Zentrifugalkraft
Exp.: Rotierender Eimer
€
Im Gleichgewicht wirken keine tangentialen Kräfte mehr auf die Wasseroberfläche
ω
2
2
F
dh mrω
ω
tan α = Z =
=
=
r
FG dr
mg
g
h
Fz
r
FG
2
=>
1ω
h(r) =
r 2 + h0
2 g
Corioliskraft
Von außen:
Von der Scheibe aus:
Drehsinn gegen den Uhrzeigersinn:
Bewegung von innen nach außen:
Scheibe dreht sich unter Kugel weg
=> Rechtsablenkung
Bewegung von außen nach innen:
Bahngeschwindigkeit der Kugel ist
hoch, die der Scheibe wird kleiner
=> Rechtsablenkung
Vom Zentrum weg (v=0)
Vom Rand (mit Anfangsgschw.)
Corioliskraft und Winde
Die Winde auf der
Nordhalbkugel werden nach
rechts abgelenkt, sodass sie
sich ein linksdrehender
Wirbel ergibt.
Auf der Südhalbkugel ist der
Drehsinn der Windwirbel
umgekehrt
Corioliskraft bestimmt den Drehsinn
der Tiefdruckgebiete und Stürme
Hurricane
Floyd
Typhoon
Yasi
Foucaultsches Pendel