Lokalisierung eines Lego-Mindstorms
Werbung

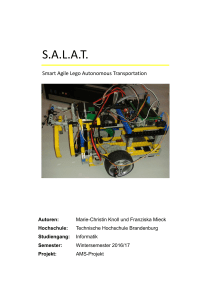
Einführung in die Mobile Robotik WS 2016/17 Projekt 2 HTWG Konstanz Prof. Dr. Oliver Bittel Lokalisierung eines Lego-Mindstorms-Roboter mit einem Partikelfilter Die folgende Abbildung zeigt einen Lego-Mindstroms-Roboter, der mit einem Differentialantrieb ausgestattet ist. Der Roboter kann wie üblich über eine Winkelgeschwindigkeit und eine Translationsgeschwindigkeit gesteuert werden. Außerdem ist der Roboter mit einem Ultraschallsensor ausgestattet, der in Fahrtrichtung ausgerichtet ist und die Entfernung d zur nächsten Wand misst. Realisieren Sie einen Partikelfilter zur Lokalisierung des Roboters. Die Geometrie der Umgebung kann als bekannt vorausgesetzt werden. In diesem Video wird ein realer Lego Mindstorms Roboter gezeigt, der sich mit diesem Ansatz lokalisiert: https://www.youtube.com/watch?v=0aaeGrLbvxk. 1/1