Physik 1 Zusammenfassung
Werbung

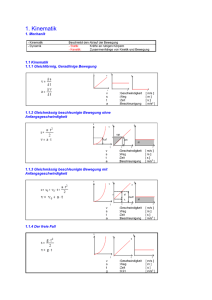
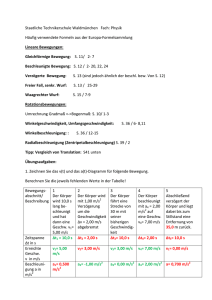
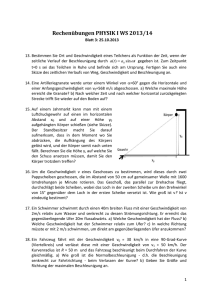
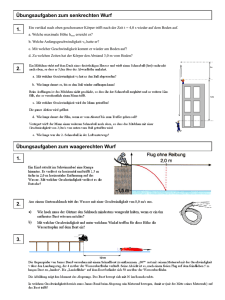
Physik 1 Zusammenfassung Lukas Wilhelm 31. August 2009 Inhaltsverzeichnis 1 Grundlagen 1.1 Mathe 1.1.1 1.2 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Einheiten 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Trigonometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 2 Statik 3 2.1 Drehmoment Hilfestellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 2.2 Haftreibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 2.3 Schwerpunkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 2.4 Dehnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 2.4.1 3 2.1.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Hilfestellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Kinematik 3 3.1 Grundlagen 3.2 geradliniege Bewegegungen 3.3 3.4 3.5 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 4 3.2.1 konstante Geschwindigkeit . . . . . . . . . . . . . . . . . . . . . . . 4 3.2.2 mittlere Beschleunigung . . . . . . . . . . . . . . . . . . . . . . . . 4 3.2.3 gleichmässig beschleunigte Translation . . . . . . . . . . . . . . . . 4 beliebige Bewegungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 3.3.1 Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 3.3.2 gleichförmig beschleunigte Bewegungen . . . . . . . . . . . . . . . . 4 Kreisbewegungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 3.4.1 . . . . . . . . . . . . . . . . . . . . . . . . . 5 Würfe Winkelbeschleunigung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 3.5.1 senkrechter Wurf . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 3.5.2 horizontaler Wurf . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 3.5.3 schiefer Wurf 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 4 Dynamik 4.1 5 Energie 4.1.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 . . . . . . . . . . . . . . . . . . . . . . . . . 5 4.2 Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Federkraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 4.3 Leistung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 4.4 Wirkungsgrad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 4.5 Impuls und Stoss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 4.5.1 vollständig inelastischer Stoss . . . . . . . . . . . . . . . . . . . . . 6 4.6 Dichte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 4.7 Federkraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 4.7.1 6 4.2.1 Energieerhaltungssatz potenzielle Energie der Federkraft . . . . . . . . . . . . . . . . . . . 5 Begriichkeiten 5.1 Lokomotive 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 6 1 Grundlagen 1.1.1 Einheiten FN Haftreibungskraft Normalkraft, kraft zu 1.2 Trigonometrie µH G A G A H H A G sin cos tan cot cot(α) = FG Haftreibungskoezient Die Koordinaten rechnen wirkende Kraft tete des als - Wir- der Kraft (Wenn man Krainie Summe der ein- Schwerpunkts- Schwerpunkts-Koordinaten werden mit Pn xi A i Man beachte: * E Elastizitätsmodul F/A senkrechter Abstand zu Wirkungslinie) (Kräfte nach Links und Unten * senkrechter Abstand zu Wirkungslinie) = 0r M − F1 ∗ l = 0 F1 ∗ l − F 2 ∗ l2 = 0 2.4.1 Hilfestellung einem Seil mit d = 8mm d A = π ∗ ( ∗ 10−3 )2 2 Dies folgt aus der Kreisäche A = r2 ∗ π 3 Kinematik 3.1 Grundlagen Abzuzäh- lende Flächen werden negativ gewichtet! (Kräfte nach Rechts und Oben Spannung = S.68 x = Pi=1A n yi Ai y = i=1A 2.1.1 Hilfestellung gleichgewicht aufstellen. entspre- tet. M =F ∗l Drehmoment- den chenden Teilächen gewich- verlängert). nach σ be- gewich- Koordinaten. Die einzelnen ◦ kungslinie sich zelnen senkrechter (90 ) Abstand Drehpunkt Kraft Querschnittäche bei einem Seil oder Draht Bei Gesamt-Schwerpunkts 2.1 Drehmoment F F = E ∆l l σ = E FRes = FAuf wand − FR 2 Statik Drehmoment Querschnittäche F A 2.3 Schwerpunkt M relative aufzuwendende Kraft: sin2 + cos2 = 1 für Gegen- A FR max = µH FN FR ≤ µH FN 1 tan(α ∆l/l, Längenänderung FR max 1000l = 1m3 Formel Dehnung = S. 104 1.1 Mathe l 2.2 Haftreibung Lichtgeschwindigkeit 300000 km = 3 ∗ s 8m 105 km = 3 ∗ 10 s s 2.4 Dehnung Hooke'sche Gesetz l S. 184 Stablänge ohne Kraftwirkung ∆l Längenänderung Kraftwirkung 3 unter 3.2 geradliniege Bewegegungen 3.2.1 konstante Geschwindigkeit v= s t 3.2.2 mittlere Beschleunigung a= a ms−2 3.2.3 gleichmässig beschleunigte Translation Geschwindigkeit nach Ablauf von t m konstant 2 s genannt Weg, in der Zeit t v0 + v at2 s= t = v0 t + 2 2 v = v0 + at q Gleiche Beziehungen wie gung: at = konstant v02 + 2as v = at t + v0 3.3 beliebige Bewegungen Tangentialbeschleunigung t v2 ar = konstant totale vt at2 = 2 2 v = at √ v = 2as at = v22 − v12 2s r ve. Beschleunigung Aufteilung der tangentiale Kraft ϕ Winkel [rad] ω Winkelgeschwindigkeit [rad/s]. Wieviele Win- Kraft kel be- s Weg, in der Zeit t zurück- gelegt [m] a= q sein, a2t + a2r 3.3.2 gleichförmig beschleunigte Bewegungen Bewegung Zeit, Dauer der Beschleu- gleich gemäss Pythagoras: m s] v grösser Komponente α ter gung. mit konstan- TangentialbeschleuniWird gleichförmig 4 Sekunde zu- Winkelbeschleunigung 2 [rad/s ] sonst iegt Auto aus Kurve. Anfangsgeschwindigkeit m Endgeschwindigkeit [ ] s muss radialer pro rückgelegt werden. nutzt werden. Haftreibungskraft v12 + 2at s 3.4 Kreisbewegungen Kraft. Zum Bremsen kann nur q = ω2r auf tangentiale und radiale mit Anfangsgeschwindigkeit nigung [s] v2 = Bsp. das Auto in der Kur- v2 a= 2s t v22 − v12 2at punkt gerichtet. s= [ s= Krümmungsmittel- Beschleunigung, während v0 at 2 t + v0 t + s0 2 s= 3.3.1 Grundlagen Zum der Zeit ständig bei der geradliniegen Bewe- Radialbeschleunigung Zeit a Ra- zurück- gelegt t sich dialbeschleunigung at = v̇ s obwohl ändert. v= ohne Anfangsgeschwindigkeit v t der Zeit ∆s ∆v ∆s = ∆t = ∆t ∆t ∆t2 Einheit ist : Beschleunigung, während T Umlaufzeit [s] r Distanz [m] υ Drehfrequenz Zentrif ugalkraf t Kraft vom Kreismittelpunkt nach mv 2 /r aussen F = 3.5.3 schiefer Wurf Zentripetalkraf t entgegengesetzt zur Zentrifugalkraft. y = tan(ϕ)x − Kraft die auf ein Auto ausgeübt werden muss damit es nicht aus der Kurve iegt. F = mv 2 /r. auch Siehe Radialbeschleu- nigung. Wenn g 2v02 cos2 (ϕ) abwärts wird, können 4.1.1 Energieerhaltungssatz ϕ geworfen und y als In einem abgeschlossenen System bleibt die Energie dieselbe. Sie kann aber die Form ändern. Minuszahlen eingesetzt werden. Ep + Ek = Eges = konstant 4 Dynamik 4.2 Arbeit S.106 S.99 v r 1 υ= T 2π = 2πυ ω= T W ω= Ekin kinetische Energie [J] Epot potenzielle Energie [J] g αt2 2 ω = ω0 + αt ϕ= ω12 − ω02 2α h Fallbeschleunigung = bei konstanter Kraft Masse des Körpers [kg] W = Fs Höhe in die der Körper m Beschleunigung [ 2 ] s FR Reibungskraft FV Verzögerungskraft F = ma FG = mg 3.5.1 senkrechter Wurf 2g 3.5.2 horizontaler Wurf g y = − 2 x2 2v0 wirkende 3.6 ∗ 106 Joule = 1kW h 9.81m/s2 S.77 h= Richtung Rotationsenergie 4.2.1 Federkraft keine konstante Kraft 1 W = Fs 2 3.5 Würfe v02 in Weges Kraft [N] gehoben wird. a konstante des wirkt [N] mit Anfangsgeschwindigkeit m vom Körper zurückgelegter Weg F ER ϕ = ω0 t + s Kraft die auf den Körper 3.4.1 Winkelbeschleunigung S.88 NM] 4.1 Energie F verrichtete Arbeit [J = mv 2 2 = FG h = mgh 4.3 Leistung P Leistung, Arbeit Zeit , [W] = J/S Ekin = Epot 1J = 1N m = 1W s W t P = Fv P = FR = µFG = FV = ma 5 4.4 Wirkungsgrad v1 Anfangsgeschw. Masse 1 Pab v2 Anfangsgeschw. Masse 2 abgegebene Leistung = 4.7.1 potenzielle Energie der Federkraft eektive Leistung Pzu m 1 v1 + m 2 v2 v = m1 + m2 zugeführte Leistung η= Pab Pzu 4.6 Dichte %= 4.5 Impuls und Stoss 4.7 Federkraft 4.5.1 vollständig inelastischer Stoss k wenn nach dem zusammen Billardkugeln Zusammenprall wegrollen wür- Richtgrösse, v0 Federkon- durch die Kraft F hervor- Kupplungshaken der Lokomotive Fmax ist die maxi- male Haftreibung der Rä- rung, Federweg der der Triebachsen (mit Teilgewicht der Lok rechnen k= F s Endgeschwindigkeit (beide zusammen) Die maximale Zugkraft am gerufene Längenände- den. bsp. Auto Zusammenstoss 5.1 Lokomotive stante [N/M] s ks2 2 5 Begriichkeiten m V Kraftstoss S.118 bsp. Ep = 0 wenn noch Laufachsen vorhanden) FHT reduziert um die Rollreibung F = −ks 6 FR zen Lokomotive. der gan-