GDE 1 - Universität der Bundeswehr München
Werbung

Universität der Bundeswehr München
Fakultät Elektrotechnik und Informationstechnik
Skriptum
zur
Vorlesung Grundlagen der Elektrotechnik I
K. Landes
Herstellung des Skriptums: Mark Dzulko, Rainer Graf, Alexander Treis
Inhaltsverzeichnis
1. Physikalische Größen, Maßsysteme und Gleichungen
1
2. Gleichstromlehre
3
2.1. Gleichstrom und Gleichspannung
2.2. Widerstand, Ohmsches Gesetz
2.3. Widerstandsschaltungen
2.4. Leistung und umgesetzte Energie im Ohmschen Widerstand
2.5. Aktive Elemente: Gleichspannungsquelle und Gleichstromquelle
2.6. Netzwerke, Kirchhoff-Gleichungen, Verfahren der
Netzwerkberechnung
2.7. Reale Spannungs- und Stromquellen
2.8. Leistung in Schaltelementen, Leistungsanpassung
3. Elektrostatik
3
4
7
10
11
12
26
29
32
3.1. Coulomb-Gesetz
3.2. Elektrisches Feld
32
33
3.2.1. Arbeit bei Ladungsverschiebung im elektrischenG Feld G
3.2.2. Arbeit Wab bei Wahl verschiedener Wege von r a nach r b
G
G
JG
3.2.3. Arbeit bei geschlossenem Umlauf r a R r b im E -Feld
3.3. Elektrische Spannung
3.4. Elektrisches Potential
35
37
38
39
39
3.4.1. Superpositionsgesetz beim Potential
G
JG G
3.4.2. Zusammenhang von Feldstärke E r und Potential V r
G
3.4.3. Zusammenhang von Spannung Uab und Potential V r
39
41
3.4.4. Herleitung der Maschengleichung
3.4.5. Äquipotentialflächen (-linien)
42
42
()
()
()
3.5. Elektrische Materialeigenschaften, Dielektrizitätskonstante
3.6. Dielektrische Verschiebung
3.6.1. Raumladungsdichte ρ
JG
3.6.2. Dielektrische Verschiebung D an der Oberfläche von Leitern
3.6.3. Influenz
3.7. Kapazität
3.7.1.
3.7.2.
3.7.3.
3.7.4.
Kugelkondensator
Plattenkondensator
Gesamtkapazität C bei Kondensatorschaltungen
Kapazität des Kondensators mit geschichtetem Dielektrikum
3.8. Energie im elektrostatischen Feld
41
43
44
46
47
47
48
49
50
51
52
53
4. Bewegte Ladungen
4.1. Beweglichkeit µ , elektrischer Strom I, elektrische
G
Stromdichte j
4.2. Lokales Ohmsches Gesetz
4.3. Leistungsdichte p
5. Magnetostatik
54
54
56
57
58
JG
5.1. Experimentelle Bestimmung der magnetischenJG Flußdichte B 58
59
5.2. Kräfte auf bewegte Ladungen
und Ströme im B -Feld
JG
5.2.1. Kraft auf einzelnen im B -Feld bewegten
Ladungsträger
59
JG
60
5.2.2. Kraft auf stromführenden
Leiter im B -Feld
JG
JG
61
5.2.3. Drehmoment MSchleife auf stromführende Leiterschleife im B -Feld
5.3.
5.4.
5.5.
5.6.
Erzeugung von Magnetfeldern
durch Ströme
JG
Magnetische Feldstärke H
Magnetfeldberechnung mit Gesetz von BIOT-SAVART
Magnetische Materialeigenschaften
5.6.1. Diamagnetismus
5.6.2. Paramagnetismus
5.6.3. Ferromagnetismus
5.7. Magnetfeld an Grenzflächen
5.8. Magnetische Kreise, Induktionskoeffizienten
5.8.1. Magnetischer Einzelkreis
5.8.2. Verkopplung magnetischer Kreise
6. Induktion
63
65
68
70
70
70
70
71
72
72
74
77
6.1. Induktion einer Spannung in einer Leiterschleife durch zeitliche
Änderung des umschlossenen magnetischen Flusses
77
6.2. Anwendung des Induktionsgesetzes
84
6.2.1.
6.2.2.
6.2.3.
6.2.4.
Transformator
84
Einzelne Spule („Drosselspule“, vgl. Kap.6.1)
85
85
Magnetische Energie Wm und magnetische Energiedichte w m
Erzeugung sinusförmiger Wechselspannungen (Generator, Dynamo) 86
Grundlagen der Elektrotechnik I
Kapitel 1 – Physikalische Größen
1. Physikalische Größen, Maßsysteme und Gleichungen
Physikalische Größe G = Zahlenwert {G} x Einheit [G ]
z.B. Strom I = {I}x [ I] = 5A
Dimension = Kennzeichnung einer physikalischen Größe: z.B. Strom, Länge, Zeit . . .
Maßsystem = Menge notwendiger, grundlegender physikalischer Größen ( = physikalische
Grundgrößen).
Einheiten dieser Grundgrößen sind definiert:
z.B. 1 Meter = Urmeter in Paris = 1,6 . . . 106 x λ einer 86 Kr − Linie
SI-Maßsystem (Systeme International d`Unités: 7 Grundgrößen)
Dimension
1.
2.
3.
4.
Formelzeichen Grundeinheit Abkürzung
Länge
Masse
Zeit
Elektr. Stromstärke
5. Absol. Temperatur
6. Lichtstärke
7. Stoffmenge
l
m
t
I
Meter
Kilogramm
Sekunde
Ampere
m
kg
s
A
T
Iν
n
Kelvin
Candela
Mol
K
cd
mol
MKSASystem
Ausreichend für die Elektrotechnik ist (als Teil des SI-Maßsystems) das MKSA-System (rationales, praktisches Maßsystem (Giorgi)). In der Physik wird teilweise noch das cgs-System
benutzt (Ladung aus mechanischen Einheiten mittels Coulomb-Gesetz).
Aus Grundgrößen werden mittels weiterer Definitionen oder physikalischer Gesetze
abgeleitete physikalische Größen + Einheiten festgelegt, z.B.:
l
dl
• Geschwindigkeit v in m aus v = oder v =
s
t
dt
Definition
v
dv
• Beschleunigung a in m 2 aus a = oder v =
t
dt
s
kg m
• Kraft F in Newton ( 1N = 2 ) aus F = m·a
s
Naturgesetz
• Arbeit W in Joule ( 1J = 1Nm ) aus W = F · l
Physikalische Gleichung = mathematische Verknüpfung physikalischer Größen gemäß einer
Definition (z.B. Geschwindigkeit) oder gemäß eines Naturgesetzes (aus Naturbeobachtung
gewonnen, z.B. Kraft). Physikalische Gleichungen müssen bezüglich Maßzahlen und Einheiten in sich konsistent sein (sog. Dimensions- oder Einheitenkontrolle),
z.B. Energievergleich (potentielle und kinetische Energie):
F⋅h =
m 2
v
2
kg m
m2
=
m
kg
2
.
2
s
s
-1-
Grundlagen der Elektrotechnik I
Kapitel 1 – Physikalische Größen
Physikalische Größen können sein:
•
•
•
•
Skalare (1-dimensional); 1 Wert 0; keine Richtung
z.B. Temperatur, Masse, Ladung
Skalare mit Zählrichtung; 1 Wert 0; Vorzeichen bezogen auf eine als positiv
festgelegte Zählrichtung, z.B.Elektr. Strom in einem Leiter, Massenstrom in einem Rohr.
Vektoren (2,3 . . . n-dimensional); konkrete Richtung im n-dimensionalen Raum
G
G
z.B. Geschwindigkeit v , Kraft F
Tensoren
-2-
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
2. Gleichstromlehre
Zeitlich konstante Verhältnisse bei Strömen, Spannungen, Leistungen, u.s.w.
2.1.
Gleichstrom und Gleichspannung
(Gleichstrom I und Gleichspannung U sind Skalare mit Zählrichtung (Zählpfeil))
„Strom“ ist ein Transportvorgang
z.B. Wärmestrom transportiert Wärme
Massenstrom transportiert Masse
hier: Gleichstrom I transportiert (zeitlich konstant im Zeitintervall t) die elektrische Ladung Q
Q = I·t
Bemerkung: In dieser physikalischen Gleichung sind nach dem MKSA-System die Einheit [s] für die Zeit t und die Einheit [A] für den Strom I definiert.
Die Einheit Ampere ist festgelegt durch das physikalische Gesetz für die Kraftwirkung zwischen 2 stromdurchflossenen, parallelen Leitern (s. Kap. Magnetismus).
I = 1A; d = 1m; längenspezifische Kräfte f = 2 ⋅ 10 −7 N
m
Die Einheit für die Elektrische Ladung ist mit Coulomb ( C ) festgelegt.
Nach der Definitions-Gleichung Q = I·t mit den Einheiten A und s für Strom und Zeit ist somit
1C = 1As
Bemerkung: Autobatterien unterscheiden sich außer in ihrer Bauform und der angebotenen Spannung in ihrem Ladungsvermögen (s. Typenschild). So kann man z.B.einer
Batterie mit 75Ah 75 h lang einen Strom von 1A entnehmen, bis sie leer ist.
Die elektrische Ladung Q kann positiv (Q>0) oder negativ (Q<0) sein. Sie besteht aus ganzzahligen Vielfachen (N+) positiver (e+) und/oder ganzzahligen Vielfachen (N-) negativer (e-)
Elementarladungen (Nachweis mit Millikan-Tröpfchenversuch) .
e+ = + 1,6 ... 10-19 As = Ladung eines Protons
e- = - 1,6 ... 10-19 As = Ladung eines Elektrons
Damit
Q = N+e+ + N –e –
mit N+, N- = 0,1,2,3, ....
Merke:
• Ein Gleichstrom I ist verbunden mit der Bewegung positiver und/oder negativer Elementarladungen e+, e- ( z.B. Protonen, Elektronen).
• Alle bewegten Ladungsträger tragen zum Strom bei
(Metall-Leiter: nur Elektronen; Gasentladung: Elektronen und Ionen).
-3-
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
•
Strom wird technisch in der Richtung positiv gewählt, in der die positive Ladung
transportiert wird (in Metalldraht also entgegen der Bewegungsrichtung der Elektronen).
Näheres im Kap. 4, „Bewegte Ladungen“
Ein Strom tritt nicht aus sich selbst heraus auf. Ursache eines „Stromes“ ist ein „Gefälle“ (Differenz) einer zugehörigen physikalischen Größe.
Beispiele:
Wärmestrom
Temperaturdifferenz (T1-T2)
Druckdifferenz (p1-p2)
Massenstrom
Ursache für den elektrischen Strom I ist eine Potentialdifferenz (V1-V2) = Spannung U12
zwischen 2 Punkten P1 und P2 (Definition des Potentials und der Spannung in Kap. „Elektrostatik“).
überwiegend positive
überwiegend negative
Ladungsträger: N1+> N1Ladungsträger: N2+< N2Q2<0
Q1>0
Verbindet man 2 unterschiedliche elektrische Potentiale V1 und V2 durch ein leitendes Medium, so führt ohne ein weiteres Zutun der Strom I zum Ausgleich der Ladungsunterschiede
(Q1 = Q2)
Potentialunterschied V1-V2 → 0 b.z.w. U12→ 0 und
zwischen Q1 und Q2
letztlich
Strom I → 0.
Durch die Zuschaltung einer Gleichspannungsquelle, die die abfließenden Ladungsträger
wieder ersetzt, kann die Potentialdifferenz V1-V2 = U12 aufrechterhalten werden. Dadurch
kann ein konstanter Strom I fließen.
2.2.
Widerstand, Ohmsches Gesetz
Die Stärke des „Stromes“ ist nicht nur abhängig von der Differenz der zugehörigen, treibenden, physikalischen Größe, sondern auch von dem „Widerstand“, der sich ihm beim Versuch, einen Potentialausgleich herzustellen, entgegenstellt, also von der Eigenschaft der
Verbindung. (Im einfachsten Fall: linearer Zusammenhang zwischen Ursache und Wirkung)
treibende, physik. Größe
potentialausgleichende Größe
Widerstand
Temperaturdifferenz
Wärmestrom
Wärmewiderstand
Druckdiffererenz
Massenstrom
Strömungswiderstand
Spannung U
elektr. Strom I
elektr. Widerstand R
-4-
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
Ohm`sches Gesetz:
U = U12
I=
oder
U = R⋅I
U
R
R=
U
I
Elektrischer Widerstand = Ohm`scher Widerstand = Proporzionalitätsfaktor zwischen U und I
Definition Leitwert G:
G=
Einheiten von I, U, R, G:
1
I
=
R U
[I] = A ( MKSA-System )
Nm Nm J
=
=
; definiert über Arbeit beim Verschieben von Ladung im elektriAs
C
C
schen Feld ( Kap. „Elektrostatik“)
U V
[R] = = = Ω (Ohm) ; aus Ohm`schen Gesetz
I A
1 1 A
[G] = = = = S (Siemens)
R Ω V
[U] = V =
-5-
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
Spezifischer Widerstand ρ, Spezifischer Leitwert σ
Beim Transport von Wärme (z.B. durch Wärmeleiter), Masse (z.B. durch Rohr), oder Ladung
(z.B. durch Widerstandsdraht) zwischen 2 Punkten wird der jeweilige Widerstand
• größer mit wachsender Länge A des Verbindungsstückes
Geometrie
• kleiner mit wachsendem Querschnitt A des Verbindungsstückes
• und hängt von der stofflichen Eigenschaft der Verbindung ab.
Material
}
Für den Ohmschen Widerstand R gilt mit R ~ A und R ~ 1
zusammengefasst unter VerA
wendung eines materialabhängigen Proportionalitätsfaktors ρ = Spezifischer Widerstand
R=ρ
A
A
→ ρ=
RA
A
2
mm 2
RA Ω m
m
aus
praktische
n
Gründen
angegeben
in
Einheit [ρ] =
=
=
Ω
→
Ω
m
m
A
Für den Leitwert G und die spezifische Leitfähigkeit σ =
G=
1 1A
A
=
=σ
R ρ A
A
→ σ=G
1
gilt entsprechend:
ρ
A 1 A 1
=
=
A RA ρ
1
m
m
=S
Einheit [σ] = =
2
mm 2
ρ Ω mm
Zählpfeile für U und I am Widerstand R; Vorzeichen im Ohmschen Gesetz
An R können Zählpfeilrichtungen für U und I prinzipiell frei gewählt werden (wogegen an
einer Spannungsquelle der Zählpfeil für Ue und an einer Stromquelle der Zählpfeil für Ie festgelegt ist). Zweckmäßigerweise, nicht notwendigerweise, wird an einem Widerstand für den
U-Pfeil und den I-Pfeil die gleiche Richtung gewählt.
Gleiche oder entgegengesetzte Richtung legen Vorzeichen im Ohmschen Gesetz fest.
oder
U=+RI
I = + GU
bei
oder
U = −R I
I = −G U
bei
-6-
Grundlagen der Elektrotechnik I
2.3.
Kapitel 2 – Gleichstromlehre
Widerstandsschaltungen
Serienschaltung von n Widerständen
R1
mit
R2
I1 = I 2 = I ν = I
Rν
U = U1 + U 2 + ⋅ ⋅ ⋅ ⋅ + U n =
Rn
n
∑ Uν
ν =1
n
gilt:
und
∑ Uν n
U ν =1
R= =
= ∑ Rν
I
I
ν =1
n
1
1
= ∑
G ν = 1G ν
z.B. 2 Leitwerte in Serie:
Gesamtwiderstand R =
Summe der Einzelwiderstände R ν
Kehrwert des Gesamtleitwertes G =
Summe der Kehrwerte der Leitwerte G ν
G + G2
1
1
1
=
+
= 1
G G1 G 2
G 1G 2
; =
G
G 1G 2
G1 + G 2
Spannungsteiler
Iν = I κ = I
Uν U κ U
=
=
Rν R κ R
Uν Rν G κ
=
=
Uκ Rκ Gν
Uκ Rκ
G
=
=
U
R
Gκ
Teilspannungen verhalten sich wie die Widerstände b.z.w. umgekehrt wie die Leitwerte.
-7-
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
Parallelschaltung von n Widerständen
mit
U1 = U 2 = U ν = U n
;
I = I1 + I 2 + ⋅ ⋅ ⋅ + I ν + ⋅ ⋅ ⋅ + I n =
n
∑ Iν
ν =1
n
gilt:
und
∑ Iν n
I ν =1
G= =
= ∑Gν
U
U
ν =1
n
1
1
= ∑
R ν = 1R ν
z.B. 2 Widerstände parallel:
Gesamtleitwert G =
Summe der Einzelleitwerte G ν
Kehrwert des Gesamtwiderstandes R =
Summe der Kehrwerte der Widerstände R ν
R + R2
1
1
1
=
+
= 1
R R1 R 2
R 1R 2
;
R=
R 1R 2
R1 + R 2
Stromteiler
Uν = U κ = U
Iν Gν R κ
=
=
Iκ G κ Rν
Iν Gν
R
=
=
I
G
Rν
Iν
I
I
= κ =
Gν Gκ G
Teilströme verhalten sich wie die Teilleitwerte b.z.w. umgekehrt wie die Teilwiderstände.
-8-
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
-9-
Grundlagen der Elektrotechnik I
2.4.
Kapitel 2 – Gleichstromlehre
Leistung und umgesetzte Energie im Ohmschen Widerstand
P= U· I
Elektrische Leistung:
( allgemeingültig)
exakte Formelherleitung im Kap. „Bewegte Ladungen“
Einheit:
[P] = [U ⋅ I] = VA = W (Watt )
J
W =
s
Leistung in R (Wärmeleistung):
PR =
PR = U R I R =
RI R2
1
= I R2
G
U R2
PR =
= GU R2
R
UR
aus : RI R I R = RI R2
2
U
U
aus : U R R = R
R
R
IR
Den jeweils praktischsten der Ausdrücke verwenden.
Umgesetzte Energie (Arbeit):
Einheit:
We = P t
[We ] = J s = J = Ws
Umrechnungen:
s
1 kW = 1,36 Ps
1kcal = 4200 Ws = 4200 J
1 kWh= 864 kcal
- 10 -
Grundlagen der Elektrotechnik I
2.5.
Kapitel 2 – Gleichstromlehre
Aktive Elemente: Gleichspannungsquelle und Gleichstromquelle
Bisher nur R (passives Schaltelement) als Verbraucher, der nur Leistung aus dem Stromkreis
aufnehmen kann (Umwandlung elektrischer Leistung in Wärmeleistung).
Spannungs- und Stromquellen sind aktive Schaltelemente, die im Regelfall Leistung an den
Stromkreis abgeben, aber in Ausnahmefällen auch Leistung aufnehmen können.
Ideale Gleichspannungsquelle:
Schaltzeichen:
oder
Schaltzeichen (nach Norm):
Ra
Ra
Merke:
Die ideale Spannungsquelle hat keinen inneren Widerstand,
•
deshalb eingeprägte Spannung Ue = Klemmenspannung UKl = konst. unabhängig
vom Klemmenstrom IKl.
• deshalb darf sie nicht kurzgeschlossen werden ( Ra = 0 ), sonst I Kl → ∞ .
Es droht Zerstörung. Deshalb Vorsicht:
Autobatterie ist nahezu ideale Spannungsquelle. Bei Starthilfe mit Starterkabeln muss
Kontakt beider Pole untereinander vermieden werden.
• deshalb keine idealen Spannungsquellen mit unterschiedlichen Spannungen Ue
parallel schalten, da sonst Ausgleichströme → ∞
Ideale Gleichstromquelle:
Schaltzeichen:
oder
Schaltzeichen (nach Norm):
Ra
Ra
Merke:
sind immer geregelte Spannungsquellen ( ohne Spannung kein Strom! )
! Stromquellen
• deshalb U ≠ 0
Kl
Die ideale Stromquelle hat keinen inneren Widerstand
•
deshalb „eingeprägter“ Strom Ie = Klemmenstrom IKl = konst. unabhängig von UKl
- 11 -
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
•
deshalb kein Leerlauf (R → ∞ ) an den Klemmen, sonst UKl → ∞
•
deshalb keine Serienschaltung von idealen Stromquellen mit unterschiedlichen
Strömen Ie, da sonst Ausgleichsspannungen → ∞
2.6.
Netzwerke, Kirchhoff-Gleichungen, Verfahren der Netzwerkberechnung
Einzelstromkreis mit
idealer Spannungsquelle Ue
und variablem Widerstand RV:
nur bedingt vergleichbare Analogie
zum Wasserkreislauf:
•
In Spannungsquelle wird Ladung gegen das Potentialgefälle durch elektrodynamische
Kräfte (Generator, Dynamo) oder chemische Kräfte (Batterie, Akku) bewegt.
•
Spannungsquelle Ue pumpt soviel positive Ladung (als Ausgleich für die über RV
abfließende Ladung Qi) von - nach + (auf höheres Niveau), dass Spannung Ue
aufrecht erhalten bleibt.
•
Strom I in Spannungsquelle = Strom I im Widerstand RV.
•
Je kleiner Widerstand RV → desto größer Strom I → desto größer verbrauchte
Leistung.
Leerlauf (offene Klemmen 1,2): R V → ∞ ; ⇒ I = 0 ; ⇒ P = 0
Kurzschluss (direkt verbundene Klemmen 1,2): R V = 0 ; ⇒ I → ∞ ; P → ∞
•
Spannung Ue an Spannungsquelle = Spannung URv an Widerstand RV.
Ue = URv
bzw.
- 12 -
Ue –URv = 0
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
Verallgemeinerte wichtige Gesetzmäßigkeit:
In einem geschlossenen Stromkreis (z.B. n Spannungsquellen Ue und m Widerständen R) ist
die Summe aller Spannungen = 0.
Nach freier Wahl des Umlaufsinnes ULS (Uhrzeiger- oder Gegenuhrzeigersinn) ergibt die
Aufsummation aller Spannungen im Stromkreis ( wobei Spannungen in Richtung des
gewählten ULS positiv und Spannungen entgegen der gewählten Richtung negativ gewertet
werden) immer = 0.
n
m
κ =1
ν =1
∑ U = ∑ Ue κ + ∑ U R ν
≡0
n
oder
∑ Ue κ
κ =1
≡−
m
∑ URν
Maschengleichung
ν =1
Konvention:
Spannungspfeil Ue an Spannungsquelle muß immer von + nach – gezeichnet werden.
Pfeile von U und I an Verbrauchern sind frei wählbar, da die real auftretende Richtung
nicht immer von vorneherein erkennbar.
Beispiel 2:
Beispiel 1:
− Ue + U R = 0
− Ue + U R = 0
UR = I ⋅ R
U R = −I ⋅ R
I=
Ue
>0
R
I=
Ue
<0
R
Bemerkung:
Bei einer unbekannten Größe (z.B. Strom) mit frei wählbarer Zählrichtung gibt das
Vorzeichen des Ergebnisses Aufschluss darüber, ob Zählpfeilrichtung richtig oder falsch
gewählt wurde.
- 13 -
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
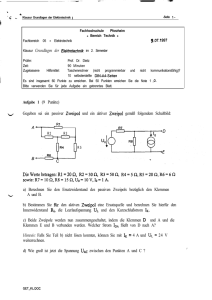
Beispiel 3:
Mehrere Spannungsquellen und Widerstände im Einzelstromkreis:
Gegeben: U e 1 , U e 2 , R 1 , R 2 , R 3
Gesucht: I
− U e1 + U R 1 + U e 2 + U R 2 − U R 3 = 0
U e 2 − U e1 = − U R 1 − U R 2 + U R 3
Beachte: U R 3 = − IR 3
U e 2 − U e1 = I (− R 1 − R 2 − R 3 )
U e1 − U e 2
I=
R1 + R 2 + R 3
Einschub: Elektromotorische Kraft EMK
Um die stromtreibende Kraft einer Spannungsquelle hervorzuheben, wurde der Begriff
Elektromotorische Kraft (EMK) eingeführt. Für eine Spannungsquelle als aktives
Einzelelement wird sie wie Ue mit positivem Vorzeichen angegeben (z.B. Ue = EMK = 3V).
Wird der Begriff EMK jedoch in einem Schaltkreis benutzt, dann zeigt der Zählpfeil für die
EMK entgegen der Richtung von Ue von – nach + ( s. Beispiel 3 ). Hierdurch sind bei einem
Maschenumlauf ULS an jeder Spannungsquelle deren Spannung Ue und deren
Elektromotorische Kraft EMK mit entgegengesetztem Vorzeichen zu werten.
Aus
wird:
∑ Ue + ∑ U R = 0
∑ EMK − ∑ U R = 0
oder
oder
∑ U e = −∑ U R
∑ EMK = ∑ U R
Maschengleichungen
aus Beispiel 3:
∑ EMK = ∑ U R
∑ U e = −∑ U R
U e 2 − U e1 = − U R 1 − U R 2 + U R 3
I=
oder
EMK1 − EMK 2 = U R 1 + U R 2 − U R 3
U e1 − U e 2
I=
R1 + R 2 + R 3
EMK1 − EMK 2
R1 + R 2 + R 3
Da für jede einzeln betrachtete Spannungsquelle Ue = EMK zu setzen ist, sind die beiden
Ergebnisse für den gesuchten Strom I identisch.
- 14 -
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
Einzelstromkreis mit Stromquelle Ie:
Zählpfeilrichtung für Ie festgelegt. Richtung der
Spannung UIe prinzipiell frei wählbar (aus technischen
Gründen aber sinnvoll entgegen der Ie-Richtung).
Richtung ULS frei ( wie immer ).
Gegeben: Ie , R ; Gesucht: UIe
-UIe + UR = 0
UIe = UR = Ie · R
Anmerkung: Die Stromquelle weist immer eine Spannung auf ( Fehlermöglichkeit ! ),
die direkt von dem Belastungswiderstand R (s.o.) abhängt. ( Nur in Netzwerken
kann der Spezialfall UIe = 0 auftreten.)
Netzwerke:
Die Kombination von Einzelstromkreisen ergibt ergibt ein „Netzwerk“ mit „Zweigen“,
„Knoten“ und „Maschen“.
•
Knoten (K) sind Punkte,an denen sich Ströme verzweigen (können).
•
Zweige (Z) sind die Strompfade zwischen 2 benachbarten Knoten.
•
Maschen (M) sind geschlossene Umläufe, (von einem Knoten ausgehend und zu ihm
zurückkehrend).
- 15 -
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
Berechnung von Netzwerken:
Kirchhoff-Gleichungen:
Knotenpunktsgleichung:
Entweder:
Summe aller zum Knotenpunkt hin fließenden Ströme = Summe aller vom
Knotenpunkt wegfließenden Ströme,
∑I = ∑I
hin
oder:
weg
Summe aller Ströme an einem Knotenpunkt = 0, wobei hinfließende und
wegfließende Ströme mit unterschiedlichen Vorzeichen belegt werden.
∑I = 0
Beispiel:
I1
I2
I3
I5
I6
I4
oder
I1 + I 2 + I 4 = I 3 + I 5 + I 6
∑ I = 0 = I1 + I 2 − I 3 + I 4 − I 5 − I 6
Maschengleichung:
Bei einem geschlossenem Umlauf einer Masche gilt:
∑ U = 0 = ∑ Ue + ∑ U R
oder
∑ U e = −∑ U R
Spannungen in Richtung eines frei wählbaren ULS positiv, Spannungen entgegen der
Richtung negativ werten.
Berechnungsverfahren:
Zweigstromverfahren:
Ein Netzwerk enthalte
•
•
•
z Zweige, in denen die aktiven und passiven Bauelemente bekannt sind. Damit besitzt
das Netzwerk prinzipiell auch z Unbekannte. Dies sind Ströme in Zweigen ohne
Stromquelle und Spannungen in Zweigen mit Stromquelle.
k Knoten, die k – 1 voneinander unabhängige Knotenpunktsgleichungen ergeben.
~ auffindbare Maschen, aus denen m unabhängige Maschengleichungen
m
~ ).
auszuwählen sind ( m ≤ m
Vorgehensweisen:
1. (Meistens zielführend:) Es gilt Maschen (möglichst klein) zu „sammeln“, solange
noch Maschen mit mindestens 1 noch nicht verbrauchten (verwerteten) Zweig
gefunden werden. (Jeder Masche kann ein ULS frei zugeordnet werden.) oder
- 16 -
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
2. Verfahren des vollständigen Baumes:
Um m unabhängige Maschen eines Netzwerkes aufzufinden, verbindet man alle
Knoten über markierte Zweige ohne einen geschlossenen Umlauf zu erzeugen (d.h.
zurück zu einem Knotenpunkt nur auf gleichem Wege möglich wie vorher weg von
Knotenpunkt). Dann sucht man fortlaufend neue Maschen mit 1. nur einem, 2. noch
nicht verbrauchten, 3. nicht markierten Zweig und erhält so die m unabhängigen
Maschengleichungen (in jeder neuen Gleichung eine neue Information).
Auf diese Weise entsteht ein unabhängiges Gleichungssystem mit k – 1 + m = z Gleichungen
zur Bestimmung von z Unbekannten. Problem war nur die richtige Auswahl der m Maschengleichungen.
Beispiel:
Knoten:
k=8
k–1=7
Maschen:
m=5
Zweige:
z = 12 = k – 1 + m
7 Knotenpunktsgleichungen
5 Maschengleichungen
Beispiel: T-Schaltung mit 2 Spannungsquellen:
Gegeben: Ue1 , Ue2 , R1 , R2 , R3
Gesucht: I1 , I2 , I3 = 3 Unbekannte
2 Knotenpunkte (k = 2)
k-1= 1 Knotenpunktsgleichung
z.B. für K1: I1 + I2 – I3 = 0 oder für K2: I3 – I1 – I2 = 0
2 Maschen (m = 2)
-Ue1 + I1R1 + I3R3 = 0
I)
II)
III)
2 Maschengleichungen
und +Ue2 – I3R3 – I2R2 = 0
I1 + I2 – I3 = 0
-Ue1 + I1R1 + I3R3 = 0
+Ue2 – I3R3 – I2R2 = 0
3 Gleichungen mit 3 Unbekannten
U e1 (R 2 + R 3 ) − U e 2 R 3
R 1R 2 + R 2 R 3 + R 3 R 1
U (R + R 3 ) − U e1R 3
I 2 = e2 1
R 1R 2 + R 2 R 3 + R 3 R 1
U e1R 2 + U e2 R1
I3 =
R1R 2 + R 2 R 3 + R 3 R1
Lösung: I1 =
- 17 -
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
Beispiel: T-Schaltung mit 1 Strom- und 1 Spannungsquelle:
Gegeben: Ue1 , I2 , R1 , R2 , R3
Gesucht: I1 , I3 , UI2 = 3 Unbekannte
k=2
m=2
1 Knotenpunktsgleichung:
2 Maschengleichungen:
I) I1 + I2 – I3 = 0
II) -Ue1 + I1R1 + I3R3 = 0
III) +UI2 – I3R3 – I2R2 = 0
I1 aus I) in II)
− U e1 + (I 3 − I 2 )R 1 + I 3 R 3 = 0
U +I R
I 3 = e1 2 1
R1 + R 3
I3 in I)
I1 = I3 − I2 =
I3 in III)
U I 2 = I3R 3 + I 2 R 2 =
U e1 + I2 R1
− I2 =
R1 + R 3
U −I R
I1 = e1 2 3
R1 + R 3
I R (R + R 3 )
U e1 + I 2 R 1
=
R3 + 2 2 1
R1 + R 3
R1 + R 3
U + I (R R + R 1R 2 + R 2 R 3 )
U I 2 = e1 2 1 3
R1 + R 3
II) Superpositionsverfahren:
Nacheinander wird jedes der s aktiven Elemente (Spannungs- und Stromquellen) eines
Netzwerkes hinsichtlich seiner Wirkung einzeln behandelt, wobei jeweils die übrigen
s-1 aktiven Elemente im Falle von Spannungsquellen durch Kurzschlüsse und im Falle von
Stromquellen durch Leerläufe ersetzt werden. Zum Schluss erfolgt eine Aufsummation
aller s Einzelwirkungen (Beispiele auf den folgenden Seiten).
Nachteil: Bei (relativ zur Netzwerkgröße) vielen aktiven Elementen sehr großer Aufwand.
III) Maschenstromverfahren:
Auffinden von m unabhängigen Maschen (s. Zweigstromverfahren). Jeder Masche 1 Maschenstrom zuordnen.
Ergibt m Maschengleichungen für m Maschenströme. Zum
Schluss werden die Zweigströme als Summe der Maschenströme errechnet. Dadurch
entfallen die Knotenpunktsgleichungen. Zweige mit Stromquellen ergeben zusätzliche
Gleichungen (Beispiele auf den folgenden Seiten).
Nachteil: Erhöhte Fehlermöglichkeit (zu wieviel Maschen gehört 1 Zweig?!)
- 18 -
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
IV) Knotenpunktspotentialverfahren:
Potential = Spannung gegenüber einem Bezugspunkt mit Potential 0.
Vorgehen: Es seien k Knotenpunkte vorhanden. 1 Knotenpunkt bekommt festes Potential
zugewiesen (z.B. V0 = 0). Die restlichen k-1 Knotenpunkte haben unbekannte Potentiale
Vκ (unbekannte Spannungen gegenüber Knotenpunkt mit V = 0). Es gilt nun die
Zweigströme durch Differenzen zwischen Knotenpunktspotentialen auszudrücken.
Damit ergeben sich k-1 Knotenpunktsgleichungen für k-1 Knotenpunktspotentiale (Beispiele
auf den folgenden Seiten).
- 19 -
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
T-Schaltung als Beispiel für Superpositionsverfahren
(Zwei Spannungsquellen)
Gegeben:
Ue1, Ue2, R1, R2, R3;
Gesucht:
I1, I2, I3;
(a)
Aktives Element Ue1 einzeln betrachtet;
Aktives Element Ue2 durch Kurzschluß ersetzt;
Ströme I11, I21, I31 mit zwei Maschengleichungen und einer Knotenpunktsgleichung oder mit
„Schnellverfahren“:
U e1 (R 2 + R 3 )
U e1
=
;
I11 =
R 2 ⋅ R 3 R 1R 2 + R 2 R 3 + R 3 R 1
R1 +
R2 + R3
R ⋅R
U e1 ⋅ R 3
1
I 21 = I11 ⋅ 2 3 ⋅ =
;
R 2 + R 3 R 2 R 1R 2 + R 2 R 3 + R 3 R 1
R ⋅R 1
U e1 ⋅ R 2
=
I 31 = I11 ⋅ 2 3 ⋅
;
R 2 +R 3 R 3 R 1R 2 + R 2 R 3 + R 3 R 1
(b)
Aktives Element Ue2 einzeln betrachtet;
Aktives Element Ue1 durch Kurzschluß ersetzt;
U e2
U e 2 ⋅ (R 1 + R 3 )
;
=
R 1 ⋅ R 3 R 1R 2 + R 2 R 3 + R 3 R 1
R2 +
R1 + R 3
R ⋅R
U e2 ⋅ R1
1
=
I 32 = I 22 ⋅ 1 3 ⋅
;
R 1 + R 3 R 3 R 1R 2 + R 2 R 3 + R 3 R 1
I 22 =
I12 = I 22 ⋅
R1 ⋅ R 3 1
U e2 ⋅ R 3
⋅ =
;
R 1 + R 3 R 1 R 1R 2 + R 2 R 3 + R 3 R 1
Gesamtwirkung = Summe der Einzelwirkungen:
I1 = I11 − I12 =
U e1 ⋅ (R 2 + R 3 ) − U e2 ⋅ R 3
;
R1R 2 + R1R 3 + R 2 R 3
I 2 = −I 21 + I 22 =
I3 = I31 + I32 =
U e2 ⋅ (R1 + R 3 ) − U e1 ⋅ R 3
;
R1R 2 + R1R 3 + R 2 R 3
U e1 ⋅ R 2 + U e 2 ⋅ R1
;
R1R 2 + R1R 3 + R 2 R 3
- 20 -
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
T-Schaltung als Beispiel für Superpositionsverfahren
(Eine Spannungsquelle, eine Stromquelle)
Gegeben:
Ue1, I2, R1, R2, R3;
Gesucht:
I1, UI2, I3;
(a)
Aktives Element Ue1 einzeln betrachtet;
Aktives Element I2 durch Leerlauf ersetzt;
Ströme I11 und I31 sowie Spannung UI21 mit zwei Maschengleichungen und einer Knotenpunktsgleichung oder
mit „Schnellverfahren“:
I11 = I 31 =
U I 21 =
(a)
U e1
;
R1 + R 3
U e1
⋅ R 3;
R1 + R 3
Aktives Element I2 einzeln betrachtet;
Aktives Element Ue1 durch Kurzschluß ersetzt;
R3
;
R1 + R 3
R1
;
I 32 = I 2 ⋅
R1 + R 3
I12 = − I 2 ⋅
R ⋅R
U I 22 = I 2 ⋅ R 2 + 1 3 ;
R1 + R 3
Gesamtwirkung = Summe der Einzelwirkungen:
I1 = I11 + I12 =
1
⋅ (U e1 − I 2 ⋅ R 3 );
R1 + R 3
I 3 = I 31 + I 32 =
1
⋅ (U e1 + I 2 ⋅ R 1 );
R1 + R 3
U I 2 = U I 21 + U I 22 =
1
⋅ (U e1 ⋅ R 3 + I 2 ⋅ (R 1R 2 + R 2 R 3 + R 3 R 1 ));
R1 + R 3
- 21 -
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
T-Schaltung als Beispiel für Maschenstromverfahren
(Zwei Spannungsquellen)
Gegeben:
Ue1, Ue2, R1, R2, R3;
Gesucht:
I1, I2, I3;
2 Maschen → 2 Maschengleichungen (keine Knotenpunktsgleichung);
M1 : (I) − U e1 + I M1 ⋅ R 1 + (I M1 − I M 2 ) ⋅ R 3 = 0;
M 2 : (II) U e 2 + (I M 2 − I M1 ) ⋅ R 3 + I M 2 ⋅ R 2 = 0;
aus (I) : I M1 =
2Gleichungen, 2 Unbekannte (IM1, IM2);
U e1 + I M 2 ⋅ R 3
;
R1 + R 3
U e1 + I M 2 ⋅ R 3
⋅ R 3 = 0;
R1 + R 3
U ⋅ R − U e 2 ⋅ (R 1 + R 3 )
= e1 3
;
R 1R 2 + R 2 R 3 + R 3 R 1
I M1 → ( II ) : U e 2 + I M 2 ⋅ ( R 3 + R 2 ) −
IM2
U e1
U ⋅ R − U e 2 ⋅ (R 1 + R 3 )
R3
;
+ e1 3
⋅
R1 + R 3
R 1R 2 + R 2 R 3 + R 3 R 1 R 1 + R 3
U ⋅ (R 2 + R 3 ) − U e 2 ⋅ R 3
;
= e1
R 1R 2 + R 2 R 3 + R 3 R 1
I M 2 einsetzen : I M1 =
I M1
Zweigströme aus Maschenströmen zusammensetzen;
U e1 ⋅ (R 2 + R 3 ) − U e 2 ⋅ R 3
;
" Nenner"
U ⋅ (R 1 + R 3 ) − U e1 ⋅ R 3
;
I 2 = −I M 2 = e 2
" Nenner"
U ⋅ R + U e2 ⋅ R1
I 3 = I M1 − I M 2 = e1 2
;
" Nenner"
I1 = I M1 =
- 22 -
(" Nenner" = R 1R 2 + R 2 R 3 + R 3 R 1 )
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
T-Schaltung als Beispiel für Maschenstromverfahren
(Eine Spannungsquelle, eine Stromquelle)
Gegeben:
Ue1, I2, R1,
R2, R3
Gesucht:
I1, UI2, I3
2 Maschen → 2 Maschengleichungen für IM1 und UI2 (wobei IM2=I2);
(Wenn eine Stromquelle nur einer Masche angehört, dann ist der Strom dieser Stromquelle gleich dem
Strom der zugehörigen Masche.)
M1 : (I) − U e1 + I M1 ⋅ R 1 + (I M1 + I 2 ) ⋅ R 3 = 0
M 2 : (II) − U I 2 + I 2 ⋅ R 2 + (I M1 + I 2 ) ⋅ R 3 = 0
aus (I) : I M1 =
2Gleichungen, 2 Unbekannte (IM1, UI2);
U e1 − I 2 ⋅ R 3
R1 + R 3
U − I ⋅R
I M1 → (II) : U I 2 = I 2 ⋅ R 2 + e1 2 3 + I 2 ⋅ R 3
R1 + R 3
1
U I2 =
⋅ (U e1 ⋅ R 3 + I 2 ⋅ (R 1R 2 + R 2 R 3 + R 3 R 1 ))
R1 + R 3
Zweigströme aus Maschenströmen zusammensetzen;
I1 = I M1 =
U e1 − I 2 ⋅ R 3
R1 + R 3
I 3 = I M1 + I M 2 = I M1 + I 2 =
1
⋅ (U e1 + I 2 ⋅ R 1 )
R1 + R 3
- 23 -
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
T-Schaltung als Beispiel für Knotenpunktspotentialverfahren
(Zwei Spannungsquellen)
Gegeben:
Ue1, Ue2, R1, R2, R3;
Gesucht:
I1, I2, I3;
Zwei Knotenpunkte:
Ein Knotenpotential (V0) festgelegt, z.B. V0=0;
Ein Knotenpotential (V1) als Unbekannte;
Zweigströme durch Knotenpunktspotentiale darstellen:
U e1 − V1
;
R1
U − V1
Zweig 2 : V1 − V0 = − I 2 ⋅ R 2 + U e 2 ; I 2 = e 2
;
R2
V
Zweig 3 : V1 − V0 = I 3 ⋅ R 3 ;
I3 = 1 ;
R3
Zweig1 :
V1 − V0 = − I1 ⋅ R 1 + U e1 ;
I1 =
Knotenpunktsgleichung: Eine Gleichung für eine Unbekannte (V1);
U e1 − V1 U e 2 − V1 V1
+
−
= 0;
R1
R2
R3
U
U
R 1R 2 R 3
V1 = e1 + e 2 ⋅
;
R 1 R 2 R 1R 2 + R 1R 3 + R 2 R 3
K1 : I1 + I 2 − I 3 =
Zweigströme:
U e1 − V1 U e1 ⋅ (R 2 + R 3 ) − U e 2 ⋅ R 3
;
=
R1
" Nenner"
U − V1 U e 2 ⋅ (R 1 + R 3 ) − U e1 ⋅ R 3
=
I 2 = e2
;
R2
" Nenner"
U ⋅ R + U e2 ⋅ R1
V
;
I 3 = 1 = e1 2
R3
" Nenner"
I1 =
- 24 -
(" Nenner" = R 1R 2 + R 2 R 3 + R 3 R 1 )
Grundlagen der Elektrotechnik I
Kapitel 2 – Gleichstromlehre
T-Schaltung als Beispiel für Knotenpunktspotentialverfahren
(Eine Spannungsquelle, eine Stromquelle)
Gegeben:
Ue1, I2, R1, R2, R3;
Gesucht:
I1, UI2, I3;
Zwei Knotenpunkte:
Ein Knotenpotential (V0) festgelegt, z.B. V0=0;
Ein Knotenpotential (V1) als Unbekannte;
Zweigströme durch Knotenpunktspotentiale darstellen:
U e1 − V1
;
R1
Zweig 2 : V1 − V0 = − I 2 ⋅ R 2 + U I 2 ; U I 2 = V1 + I 2 ⋅ R 2 ;
V
Zweig 3 : V1 − V0 = I 3 ⋅ R 3 ;
I3 = 1 ;
R3
Zweig1 :
V1 − V0 = − I1 ⋅ R 1 + U e1 ;
I1 =
Knotenpunktsgleichung: Eine Gleichung für eine Unbekannte (V1);
U e1 − V1
V
+ I 2 − 1 = 0;
R1
R3
RR
U
V1 = e1 + I 2 ⋅ 1 3 ;
R1 + R 3
R1
K1 : I1 + I 2 − I 3 =
Zweigströme I1, I3 und Spannung UI2 an der Stromquelle:
U e1 − V1
1
=
⋅ (U e1 − I 2 ⋅ R 3 );
R1
R1 + R 3
V
1
⋅ (U e1 + I 2 ⋅ R 1 );
I3 = 1 =
R 3 R1 + R 3
I1 =
U I 2 = V1 + I 2 ⋅ R 2 =
1
⋅ (U e1 ⋅ R 3 + I 2 ⋅ (R 1R 2 + R 2 R 3 + R 1R 3 ));
R1 + R 3
- 25 -
Grundlagen der Elektrotechnik I
2.7.
Kapitel 2 – Gleichstromlehre
Reale Spannungs- und Stromquellen
Reale Stromquelle
Reale Spannungsquelle
Die reale Spannungsquelle besitzt einen
Innenwiderstand Ri , der in Serie mit der
Quelle (eingeprägte Spannung U0) liegt.
Die reale Stromquelle besitzt einen Innenwiderstand Ri bzw. Innenleitwert Gi , der
parallel zur Quelle (eingeprägter Strom I0)
liegt.
Der Strom IKl verursacht somit an Ri einen
Spannungsabfall URi, der zu einer Verminderung der Klemmenspannung UKl<U0
führt. Je größer der Innenwiderstand Ri der
Spannungsquelle, umso größer der Einfluss
von IKl auf die Klemmenspannung.
Somit fließt ein Teil des eingeprägten
Stromes I0 über den Innenwiderstand Ri
(Innenleitwert Gi) ab und vermindert so
den Klemmenstrom IKl<I0. Je kleiner der
Innenwiderstand Ri umso größer der Einfluss auf IKl.
I Kl = I 0 − U Kl ⋅ G i = I 0 −
UKl = U0 – IKl · Ri
U Kl
Ri
Wie verhalten sich reale Spannungs- und Stromquellen bei Lastwechsel?
( UL = Leerlaufspannung ; IK = Kurzschlussstrom )
Reale Stromquelle
Die reale Stromquelle besitzt Leerlauf:
einen Innen-R a → ∞ ; bzw . G a = 0
U
L = U0
widerstand Ri bzw. Innenleitwert GiI,Kl
der= 0 ; U Kl = U L ≠ 0
parallel zur Quelle liegt.
IK =
U0
Ri
Kurzschluss: R a = 0 ; bzw . G a → ∞
U Kl ≡ 0 ; I Kl = I K ≠ 0
I
UL = I0R i = 0
Gi
IK = I0
Somit fließt ein Teil des eingeprägten
Stromes I0 über den Innenwiderstand ab
und
so den
Klemmenstrom
IKl. Stromquelle der Innenwiderstand bestimmt werden?
Wie vermindert
kann bei einer
realen
Spannungs- bzw.
Je kleiner der Innenwiderstand umso gröU
ßer der
mitEinfluss
UL = U0auf
undIKlI .K = 0
mit IK = I0 und UL = I0Ri
Ri
U
U
1
ist
= L⋅ G = I − U Kl
Ri =
= L
ist
I Kl = I 0R−i U
Kl
i
0
IK
Gi IK
Ri
Ersatzschaltungen:
- 26 -
Grundlagen der Elektrotechnik I
Kapitel2 – Gleichstromlehre
Ersatzschaltungen:
Bezüglich eines Klemmenpaares a_b kann ein komplexes Netzwerk (einige Ue, Ie, R) ersetzt
werden durch
•
•
eine reale Spannungsquelle oder
eine reale Stromquelle
ohne dass sich Klemmeneigenschaften ändern, d.h. Originalschaltung und Ersatzschaltung
sind bezüglich ihrer elektrischen Eigenschaften ununterscheidbar.
Ersatzschaltungen sind jedoch viel einfacher (jeweils nur 2 Elemente)
Um eine Ersatzschaltung festlegen zu können müssen von der Originalschaltung 2 der
(Innenwiderstand
3 Größen UL (Leerlaufspannung), IK (Kurzschlussstrom) und R i = 1
Gi
bzw. Innenleitwert) bekannt sein. Die 3. Größe ergibt sich aus
I
UL = IK Ri = K
Gi
Damit ist die Ersatzquelle bestimmt, als
•
•
reale Spannungsquelle mit U0 = UL
reale Stromquelle mit I0 = IK
Prinzipiell sind in allen Fällen sowohl reale Spannungsquellen als auch reale Stromquellen als
Ersatzschaltungen möglich.
U
Welche Ersatzquelle sinnvoll ist, hängt von der Größe des Innenwiderstandes Ri = L ab.
IK
•
Ri↓ (klein) → Spannungsquelle
Sehr große Werte des Kurzschlussstromes IK lassen auf eine Spannungsquelle
schließen. (bei Stromquelle würde im Kurzschlussfall nur der eingeprägte Strom I0
fließen)
• Ri↑ (groß) → Stromquelle
Bei sehr großen Werten der Leerlaufspannung UL ist eine Stromquelle
anzunehmen.(eine Spannungsquelle würde im Leerlauffall nur die eingeprägte
Spannung U0 aufweisen)
- 27 -
Grundlagen der Elektrotechnik I
Kapitel2 – Gleichstromlehre
Beispiel: Berechnung einer Ersatzschaltung
Gegeben: Ue , I0 , R1 , R2 , R3
Gesucht: Ersatzspannungsquelle
I3 = IK
K1: I0 + I1- IK = 0
M1: -Ue + I1R1 – I0R2 + UI0 = 0
M2: -UI0 + I0R2 + IKR3 = 0
M1+M2: -Ue + I1R1 + IKR3 = 0
mit K1: -Ue - I0R1 + IKR1 + IKR3 = 0
IK(R1 + R3) = Ue + I0R1
U + I 0R1
IK = e
R1 + R 3
I3 = 0 und damit auch U3 = 0;
Damit Spannung zwischen K1 und
K2 = UL.
Außerdem, wenn I3 = 0 ist I1 = - I0;
M1: -Ue + I1R1 + UL = 0
-Ue - I0R1 + UL = 0
UL = Ue + I0R1
Ri =
UL
= R1 + R 3
IK
Da nur 2 Größen aus einem Netzwerk zu ermitteln sind, um die 3. zu bestimmen, wäre auch
denkbar, die Leerlaufspannung UL zusammen mit dem Innenwiderstand Ri bzw. den
Kurzschlussstrom IK zusammen mit Ri zu ermitteln und daraus den Kurzschlussstrom
IK = UL
bzw. die Leerlaufspan-nung UL = Ri·IK zu bestimmen. Häufig ist die
Ri
Bestimmung von Ri (hier zB. statt IK) der einfachere Weg.
- 28 -
Grundlagen der Elektrotechnik I
Kapitel2 – Gleichstromlehre
Vorgehensweise zur Bestimmung von Ri:
Generell kann man den Innenwiderstand Ri eines Netzwerkes ermitteln, indem man alle
Spannungsquellen durch Kurzschlüsse und alle Stromquellen durch Leerläufe ersetzt.
Dann in die Schaltung durch Klemmen a_b hineinsehen und „gesehenen“ Widerstand
bestimmen; dieser ist Ri.
R2 „hängt in der Luft“= zu vernachlässigen.
Somit Ri = R1 + R3
2.8.
Leistung in Schaltelementen, Leistungsanpassung
An jedem Element einer Schaltung gilt für die Leistung
P=U·I
Beim Einsetzen der vorzeichenbehafteten Ergebnisse von U und I an einem Schaltelement
ergibt sich ein vorzeichenbehafteter Wert für P. Das Vorzeichen von P gibt an, ob
Leistungsaufnahme oder Leistungsabgabe an diesem Element stattfindet.
Dazu muss jedoch beachtet werden, welches der 2 Zählpfeilsysteme an dem Element vorliegt.
Verbraucherzählpfeilsystem ( VZS) = Zählpfeile von U und I sind gleichgerichtet
dann gilt: P > 0 Leistungsaufnahme
P < 0 Leistungsabgabe
Erzeugerzählpfeilsystem (EZS) = Zählpfeile von U und I entgegengerichtet
dann gilt: P > 0 Leistungsabgabe
P < 0 Leistungsaufnahme
Beispiel 1:
mit I > 0 → UR > 0
( UR = + I·R )
PR = I·UR > 0 ; VZS → Leistungsaufnahme
PU = I·U0 > 0 ; EZS → Leistungsabgabe
Beispiel 2:
mit I < 0 → UR > 0
( UR = - I·R ) !
PR = I·UR < 0 ; EZS → Leistungsaufnahme
PU = I·U0 < 0 ; VZS → Leistungsabgabe
- 29 -
Grundlagen der Elektrotechnik I
Kapitel2 – Gleichstromlehre
Beispiel 3:
mit I > 0 → UR < 0
(UR = - I·R )
PR = I·UR < 0 ; EZS → Leistungsaufnahme
PU = I·U0 > 0 ; EZS → Leistungsabgabe
In einem Netzwerk werden sinnvollerweise aber nicht notwendigerweise bei
Verbrauchern das VZS und bei Erzeugern das EZS benutzt.
Achtung: Bei R immer Leistungsaufnahme; bei Ue und Ie nicht immer Leistungsabgabe
Energieerhaltungssatz:
Summe der abgegebenen Leistung = Summe der aufgenommenen Leistung
Da sich bei Verwendung beider Zählpfeilsysteme in einem Netzwerk eine falsche
Richtungsannahme des Zählpfeils über das Vorzeichen im Ergebnis wieder korrigiert, gilt
für die Leistungsbilanz analog:
∑ PEZS = ∑ PVZS
Bemerkung:
∑ PEZS
∑ PVZS
Summe aller Leistungen an Elementen mit EZS
Summe aller Leistungen an Elementen mit VZS
- 30 -
Grundlagen der Elektrotechnik I
Kapitel2 – Gleichstromlehre
Leistungsanpassung:
Bei der Leistungsanpassung stellt sich die Frage: Mit welchem Lastwiderstand Ra kann man
aus einer realen Spannungsquelle bzw. Stromquelle die maximale Leistung entnehmen.
Grenzwerte:
a
Ra = 0 (Kurzschluss) → Ua = 0 → PRa = Ua I = 0
Ra → ∞ (Leerlauf) → I = 0 → PRa = Ua I = 0
Gesucht: PRa max
I=
U0
Ri + Ra
; PRa = U a I = I 2 R a =
2 g (R a )
PRa = U 0
h (R a )
dPRa
2
= U0
dR a
h
2
U0 R a
g (Ra)
(R a + R i )2
= f (R a )
h (Ra)
; durch Anwendung der Quotientenregel
dh
dg
−g
2
dR a
dR a
2 (R a + R i ) 1 − R a 2 (R a + R i )
= U0
h2
(R a + R i )4
dPRa max
=0 →
dR a
(R a + R i )2 = R a 2 (R a + R i )
Maximale Leistung an Ra tritt auf für den Fall
- 31 -
→ R a + R i = 2R a
Ra = Ri
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3 Elektrostatik
Ruhende Ladungen, Kraftwirkungen, Feld- und Potentialbegriff, Kapazität
3.1 Coulomb Gesetz
Zwei Arten elektrischer Ladung: positiv, negativ (willkürliche historische Bezeichnung).
Gleichnamige Ladungen stoßen sich ab, ungleichnamige Ladungen ziehen sich an. Ladung als
Elektrizitätsmenge; Einheit: 1 Coulomb (C) = 1 Amperesekunde (As);
kleinste vorkommende Ladung = Elementarladung = Ladung eines Elektrons = 1,6 ⋅ 10 −19 C .
Kraftwirkung zwischen zwei Ladungen Q1 und Q2.
r r
r1 , r2
r
r r
r12 = r2 − r1
r
r12
r
Einheitsvektor
r012 = r
r12
r
(Richtung, r012 = 1 )
Ortsvektoren
Abstandsvektor
r
Kraft F12 , die Q1 auf Q2.ausübt.
Coulomb Gesetz
(1. Index: Ursache, 2. Index: Wirkung)
r
Q1 ⋅ Q2 r
Q1 ⋅ Q2 r
r
F12 = F12 ⋅ r012 = c ⋅ r 2 ⋅ r012 = c ⋅ r 3 ⋅ r12
r12
r12
c: Proportionalitätskonstante
(vgl. Newtonsches Gravitationsgesetz:
Im Vakuum gilt:
r
F12 =
r
M ⋅M r
F12 = −γ ⋅ 1r 2 2 ⋅ r012 )
r12
Q ⋅Q r
1
⋅ 1r 2 2 ⋅ r012 ;
4 ⋅ π ⋅ ε0
r12
mit Dielektrizitätskonstante ε 0 des Vakuums: ε0 = 8,85 ⋅ 10
2
1
9 N ⋅m
(einfacher zu merken:
= 9 ⋅ 10
;)
4 ⋅ π ⋅ ε0
C2
-32-
−12
C2
1
C2
=
;
N ⋅ m2 4 ⋅ π ⋅ 9 ⋅ 109 N ⋅ m2
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3.2 Elektrisches Feld
Feldbegriff:
Eine Ladung Q bewirkt eine Veränderung im umgebenden Raum; erzeugt einen
„Zustand“ des Raumes = erzeugt ein „Feld“. Mit einer „Probeladung“ kann
dieses
Feld lokal vermessen werden. Ausgenutzter Effekt: Wirkung einer Kraft
r
Fq auf Probeladung q.
Das elektrische Feld existiert unabhängig von Nachprüfung durch Probeladung
(damit nur gemessen) vgl. Temperaturfeld und Thermometer.
r r
Fq (r A ) Kraft auf Ladung q am Ort rrA
r r
Def.: Elektrische Feldstärke E (rA ) =
=
q
Ladung q
r
Begriffe: Aufpunkt rA
r
Quellpunkt rQ
= Ort der Wirkung = Ort, an dem Feld betrachtet wird =
Ort, wo Kraft auf Probeladung q wirkt
= Ort der Ursache = Ort der felderzeugenden Ladung
r r
r
Beispiel: Elektrisches Feld E (rA ) am Aufpunkt rA in der Umgebung einer Punktladung Q,
r
die sich am Ort rQ befindet.
Q1 ⋅ Q2 r
1
⋅ r 2 ⋅ r012 und mit
4π ⋅ ε 0
r12
r r
r r r
r
r r r
r
r
r
r
Q1 = Q , r1 = rQ ; Q2 = q , r2 = rq = r A ; r12 = r2 − r1 = r A − rQ = rQA ; r012 = r0QA
r
r
r r
Q⋅q r
1
gilt:
F12 = FQq = Fq (r A ) =
⋅ r 2 ⋅ r0QA
4π ⋅ ε 0 r
QA
r r
Daraus folgt für die Feldstärke E (ra ) :
r r
r
r
rA − rQ
Fq (rA )
r r
Q
Q
Q⋅q r
1
1
1
r
;
E (rA ) =
=
⋅
⋅r ⋅ =
⋅
⋅r =
⋅
q
4 ⋅ π ⋅ ε 0 rr 2 0QA q 4 ⋅ π ⋅ ε 0 rr − rr 2 0QA 4 ⋅ π ⋅ ε 0 rr − rr 3
QA
A
Q
A
Q
r
Spezialfall: Ladung Q befindet sich im Koordinatenursprung: rQ = 0;
r
r r
rA
Q r
Q
1
E (rA ) =
;
⋅
⋅r =
⋅
4 ⋅ π ⋅ ε 0 r A2 0 4 ⋅ π ⋅ ε 0 rr 3
A
r
r
r
r
hierbei ist rA = x ⋅ ex + y ⋅ ey + z ⋅ ez der Ortsvektor des Aufpunktes mit
r
r
r
r
r
r rA x ⋅ ex + y ⋅ e y + z ⋅ ez
2
2
2
dem Betrag rA = rA = x + y + z und dem Einheitsvektor r0 =
=
rA
x2 + y2 + z2
r
Mit Coulomb Gesetz F12 =
r
r
r
Umkehr der Definition von E ; Ladung q erfährt im Feld E eine Kraft Fq für die jetzt gilt:
r
r
Fq = q ⋅ E
W⋅s
r
N
m V
Einheit des elektrischen Feldes [ E ] = =
= ;
C
A⋅ s
m
-33-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
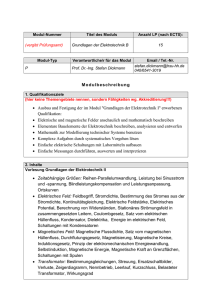
Graphische Darstellung des elektrischen Feldes
Entweder punktweise Darstellung durch Feldstärkevektoren oder durch Feldlinien
(vorzustellen als Bahnkurven „gebremster“ positiver Probeladungen)
• Feldlinien beginnen bei positiven Ladungen (Quellen) und enden auf negativen Ladungen
(Senken)
1
• Dichte der Feldlinien ist proportional zum Betrag der Feldstärke (Kugelfeld → 2 )
r
• Feldstärkevektoren sind Tangentenvektoren an Feldlinien
Beispiel: Feldlinienbild einer positiven Punktladung Q+ bzw. negativen Punktladung Q−
Superpositionsprinzip (Überlagerungsprinzip)
Wichtiges Prinzip, das in der Elektrostatik zur Berechnung des von mehreren räumlich
verteilten Ladungen
erzeugten elektrischen Feldes angewandt werden darf.
r
Einzelkraft Fν auf Ladung q verursacht durch Einzelladung Qν :
r
Q ⋅q
1
r
r
Fν =
⋅ r ν r 3 ⋅ ( r A − rν )
4 ⋅ π ⋅ ε0 r − r
ν
A
r
Resultierende Gesamtkraft Fres auf die Ladung q verursacht durch die
Gesamtheit der n Ladungen Qν :
n r
r
Fres = ∑ Fν
(vektorielle Addition)
r
r
r
r
Fres
Fν
Mit Definition des E-Feldes: E res =
bzw. E ν =
:
q
q
n r
r
r
Fν
n
n
r
v
F
Fres ∑
E res =
= ν =1
= ∑ ν = ∑ Eν ;
q
q
ν =1 q
ν =1
r
n
(Resultierende Gesamtfeldstärke E res
r
v
E res = ∑ Eν ; als vektorielle Summe aller
ν =1
r
Einzelfeldstärken E ν )
Superposition der E-Felder zweier Ladungen
ν =1
-34-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3.2.1 Arbeit bei Ladungsverschiebung im elektrischen Feld
r r
r r
r r
r r
r
Kraft F ( r ) auf Ladung q am Ort r im elektrischen Feld E ( r ) : F ( r ) = q ⋅ E ( r ) ;
r
r
r
r
Von Ladung q geleistete Arbeit ∆W bei kleiner Verschiebung ∆ r von r nach r + ∆r
r r
im elektrischen Feld E ( r ) :
r r
E (r )
r r
r r
r
r
∆W ≈ F ( r ) • ∆r = qE ( r ) • ∆r
r r
• näherungsweise (≈), wenn E (r )
r
entlang ∆r nicht konstant ist
r r
r
E (r + ∆r )
α
r
r
r
r
r + ∆r
r
∆r
• „Arbeit =Kraft skalar mal Weg“
r
r
Von Ladung q geleistete Arbeit Wab bei Verschiebung entlang Bahnkurve k von ra nach rb .
Der Weg k wird zunächst durch einen
Polygonzug p angenähert:
n
r
r
r
r r
r r
ra + ∆r1 + ∆r2 +...+ ∆rn = ra + ∑ ∆rν = rb
ν =1
Bei der Verschiebung entlang p wird von
der Ladung q die Arbeit Wabp geleistet:
n
n
r r
r
Wabp ≈ ∑ ∆Wν = ∑ qE ( rν ) • ∆rν
ν =1
ν =1
r
r
Beim Grenzübergang ∆rν → dr → 0 geht der Polygonzug p in die Bahnkurve k über. Die
geleistete Arbeit Wab ergibt sich als Integral (= Summe von unendlich vielen, unendlich klein
werdenden Summanden ∆Wν → dW ):
r
rb
r r
r r
r
r
Wab = lim
qE (rν ) • ∆rν =q ∫ E (r ) • dr
∑
r
14243 rr
∆rν → 0
ν =1
n
n→∞
∆Wν
-35-
a
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
Arbeit bei speziellen Ladungsverschiebungen im E-Feld
Fall 1) Verschiebung senkrecht zu den Feldlinien
r r
r
E ( r ) • dr ≡ 0 ;
r
rd
r r
r
( r2
) •4
Wcd = q ∫ 1
E4
dr
3=0
r
rc
=0
Fall 2) Verschiebung parallel zu den Feldlinien
r r
r r
r
r
E (r ) • dr = E (r ) ⋅ dr ;
r
rf
r r
r
Wef = q ∫ E (r ) ⋅ dr
r
re
Beispiel zu Fall 2: Radiale Verschiebung der Ladung q im E-Feld der Punktladung Q
r
rb
r
rb
r
ra
r
ra
r r
r r
r
r
Wab = q ∫ E (r ) • dr = q ∫ E (r ) ⋅ dr
r r
mit E (r ) =
1
Q
⋅ 2 = f (r ) → Vereinfachung:
4π ε 0 r
r r
r
r
r
E ( r ) = E ( r ) = E (r ) , ra → ra , rb → rb ;
rb
W ab = q ∫
ra
Q
E (r )dr = q
4π ε0
qQ 1 1
Wab =
−
4π ε0 ra rb
rb
∫
ra
Q
1
( − 1)
=
⋅
d
r
q
r
4π ε0
r2
rb
ra
Für ra < rb gilt:
Wab>0 für Signum Q = Signum q („Abstoßung“)
Wab<0 für Signum Q ≠ Signum q („Anziehung“)
Richtungsumkehr:
r
ra
r r
r
Wba = q ∫ E ( r ) • dr =... = −Wab
r
rb
-36-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
r
r
3.2.2 Arbeit Wab bei Wahl verschiedener Wege von ra nach rb
Beispiel: E-Feld einer Punktladung Q
r
ra ′
Waa ′b
r
rb
r r
r r
qQ 1 1
r
r
= q∫ 1
+
•
=
( r2
) •4
(
)
E4
dr
q
E
r
dr
∫ 42
3
4
3 4π ε0 ra′ − rb
r
r 1
r
r r
r
ra
ra ′
= 0, da E ⊥ dr
r
rb ′
Wab′b
E dr
=
( ra ′ = ra )
r
rb
r r
r r
r
r qQ 1 1
= q∫ 1
+
•
=
( r2
) •4
(
)
E4
dr
q
E
r
dr
−
∫
3
1
4
2
4
3
r
r
π
ε
4
rb′
r
r
r
r
0 ra
ra
rb ′
E dr
Ergebnis:
= 0 , da E ⊥ dr
=
( rb′ = rb )
qQ 1 1
−
4π ε0 ra rb
qQ 1 1
−
4π ε0 ra rb
Waa ′b = Wab′b = Wab (auf beliebigem Weg)
Allgemeiner Satz:
r r
Im elektrostatischen Feld E ( r ) ist die Arbeit Wab bei Verschiebung einer Ladung von der
r
r
Wahl des Weges ra → rb unabhängig.
r
r
(Beweis über Zerlegung des Weges ra → rb in Kreis- und Radialelemente)
-37-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
r →r
3.2.3 Arbeit bei geschlossenem Umlauf ra rb im E-Feld
←
Aus
Wab1 = Wab2 (Arbeit ist wegunabhängig)
sowie aus
Wab1 = −Wba1 und Wab2 = −Wba2
folgt für einen Umlauf: Wab1 + Wba2 = Waba = Wab1 − Wab1 = 0
Wab2 + Wba1 = Waba = Wab2 − Wab2 = 0
bzw.
Allgemein:
Bei einem geschlossenem Umlauf
oder
wird insgesamt keine Arbeit geleistet.
Die auf dem einen Weg gewonnene Arbeit wird auf dem anderen Weg wieder abgegeben.
Vgl. Rundweg im Gebirge
r
rb
Aus Waba
∫
r
r
r r
r a r r
r
= ∫ qE (r ) • dr + ∫ qE (r ) • dr = 0 bzw. Waba = 0 ergibt sich:
r
ra
Weg 1
r
rb
Weg 2
r r
r r
r
r
E ( r ) • dr = ∫ E ( r ) • dr ≡ 0 ⇒
∫
r r
r
E ( r ) • dr = 0
ULS
ULS
r
Das Umlaufintegral (über eine geschlossene Kurve) der elektrostatischen Feldstärke E
verschwindet immer
→
„E-Feld ist wirbelfrei“
-38-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3.3 Elektrische Spannung
r
r
Def.: Die elektrische Spannung Uab zwischen den Punkten ra und rb ist die Arbeit Wab , die
r
r
von der Ladung q bei Verschiebung von ra nach rb geleistet wird, dividiert durch die
Ladung q. („Ladungs-spezifische Arbeit“)
r
rb
U ab =
Wab
=
q
r r
r
rb
r
∫ qE (r ) • dr
r
ra
U ab
q
r r
r
= ∫ E ( r ) • dr
r
ra
Umkehrung: Wab = qU ab
Die elektrische Spannung Uab ist:
•
•
•
•
Einheit der Spannung [U ] = 1Volt = 1
r
Linienintegral über elektrische Feldstärke E ;
immer zwischen zwei Punkten definiert;
wegunabhängig;
r
r
Skalar mit Zählpfeil (Zählrichtung) von ra nach rb
Nm
;
As
3.4 Elektrisches Potential
r
r
Def.: Das elektrische Potential V (ra ) an einem Ort ra (Aufpunkt) ist die Spannung U rra rrp
r
r
zwischen diesem Ort ra und einem festen Bezugspunkt rp , dem das Potential Vrrp = 0
zugeordnet wird.
W
r
V (ra ) = U rra rrp =
q
rr
ra rp
r
rp
r r
r
= ∫ E (r ) • dr
r
ra
r
Das elektrische Potential V (ra ) ist eine skalare, ortsabhängige Funktion; Einheit [V] = 1 Volt
-39-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
r
r
Beispiel: Potential V (ra ) in der Umgebung einer Punktladung Q am Ort rQ .
r
Festlegung V (rp = ∞) = 0 ;
r
V ( rA ) =
r
rp =∞
∫
r
rA
r r
r
E ( r ) • dr =
r
rp =∞
∫
r
rA
Q
1
r r
r
r
r
dr
(
)
−
•
Q
3
4π ε 0 rr − rr
Q
r
r
Speziell: Ladung Q im Ursprung rQ = 0 ;
r
rp =∞
r
Q
r
r
r
V ( rA ) = ∫
• dr
3
r
4 ⋅ π ⋅ ε0 r
rA
r r r
Bei Integration entlang einer Feldlinie (hier radial verlaufend) gilt dr r E .
Damit ergibt sich:
r
r
r
V ( rA ) =
Q
4π ε 0
rp =∞
r
r3
{
∫
r
rA
Q
dr =
4π ε 0
nur vom Betrag
rp =∞
∫
r
rA
r =∞
Q
1
1 p
dr =
( −1)
4π ε 0
r rA
r2
r abhängig
r
V ( rA ) =
r
r
r
mit rQ = 0 und V (rp = ∞) = 0 ;
1 Q
4π ε 0 rA
r
Allgemein: Ladung Q an beliebigen Ort rQ :
r
V (rA ) =
Q
1
4π ε0 rrA − rrQ
r
r
r
mit rQ ≠ 0 und V (rp = ∞) = 0 ;
3.4.1 Superpositionsgesetz beim Potential
r
Gegeben: n Ladungen Qν an Orten rν .
n r
n
r r
r
resultierende Feldstärke: E res (rA ) = ∑ Eν (rA ) = ∑
Qν
1
r r
3 ( rA − rν )
r
r
ν =1 4π ε 0 r − r
ν
A
ν =1
r
rp
r
r
r
r
p n
p
r r
r r
r
r
r n r r
r
resultierendes Potential: Vres ( rA ) = ∫r E res (r ) • dr = ∫r ∑ Eν ( r ) • dr = ∑ ∫r E res (r ) • dr
ν =1 rA
rA
rA ν =1
14
42r 44
3
Vν ( rA )
n
r
r
Vres (r ) = ∑Vν (r )
ν =1
r
Das resultierende Potential Vres (r ) ist die
r
Summe der Einzelpotentiale Vν (r ) , die durch die
Einzelladungen Qν verursacht werden.
Superposition der Potentiale = Addition von Skalaren.
-40-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
r r
r
3.4.2 Zusammenhang von Feldstärke E ( r ) und Potential V ( r )
r
r r
r
zwei benachbarte Punkte r1 und r2 = r1 + ∆ r haben die Potentiale:
r
rp
r
rp
r r
r
r
V (r1 ) = ∫ E (r ) • dr ;
r r
r
r
V (r2 ) = ∫ E (r ) • dr
und
r
r2
r
r1
Potentialunterschied:
r
rp
r
r
r
r
r
r
r2
r
r1
r
rp
r
r1
r2
p
p
r r
r r
r r
r r
r
r
r
r
r
r
∆V = V ( r2 ) − V (r1 ) = ∫ E (r ) • dr − ∫ E (r ) • dr = − ∫ E (r ) • dr − ∫ E (r ) • dr =
r
r
r
r
r
r2
r2 = r1 + ∆ r
rp r r
r r
r r
r r
r
r
r
r
− ∫ E (r ) • dr + ∫ E (r ) • dr = −
•
≈−
•
∆
r
dr
E
r
r
)
E
(
(
)
1
∫rr
r
rp
rr1
1
14
4244
3
vgl .:
X 2 = X 1 + ∆X
∫ f ( x ) dx ≈ f ( x1 )⋅∆x
X1
r
r
Im Grenzfall ∆r → dr ≈ 0 und ∆V → dV ≈ 0 gilt:
r r
r
dV = − E ( r ) • dr
r
Potentialabnahme in Richtung von E
r
3.4.3 Zusammenhang von Spannung U ab und Potential V ( r )
U ab
r
rb
r
r
r
r
r
r
r
r
ra
r
ra
r
rp
r
ra
r
rb
rb
p
p
p
r r
r r
r r
r r
r r
r
r
r
r
r
r
r
= ∫ E (r ) • dr = ∫ E (r ) • dr + ∫ E (r ) • dr = ∫ E (r ) • dr − ∫ E (r ) • dr = V (ra ) − V (rb )
U ab
r
r
= V (ra ) − V (rb )
-41-
Spannung = Potentialdifferenz
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3.4.4 Herleitung der Maschengleichung
Ub
2
3
+
Ra
-
Rc
Ua
Uc
r r
r
∫ E (r ) • dr ≡ 0 gilt für
Elektrostatik und Gleichstrom
+
-
1
4
Ud
r
r
E
∫ • dr =
2
r
r
E
∫1 • dr
12
4 4
3
V1 −V2 = − (V2 −V1 ) = −U a
oder
∑U = 0
3
4
1
r
r
r
r
r
r
+ ∫ E • dr + ∫ E • dr + ∫ E • dr = 0 ⇒ − U a + U b + U c − U d = 0
24 4
34 4
44 4
12
3 12
3 12
3
V2 −V3 =U b
V3 −V4 =U c
[Maschengleichung]
V4 −V1 = −U d
mit Vorzeichen der Teilspannungen entsprechend
dem Umlaufsinn (ULS).
3.4.5 Äquipotentialflächen (-linien)
Def.: Äquipotentialflächen (-linien) sind Flächen (Linien) auf denen das Potential V einen
r
konstanten Wert hat: V (r ) = konst .
r
r
d.h.: Bei Verschiebung einer Ladung q von ra nach rb auf der Äquipotentialfläche wird keine
Arbeit geleistet: Wab = q ⋅ U ab = q ⋅ (Va − Vb ) = 0 , da Va=Vb . Bei Verschiebung der Ladung q
r
r
um dr vonr einem Punkt r aus in beliebiger Richtung
auf einer
r Äquipotentialfläche gilt:
r
r
r
r
dW = q ⋅ E (r ) • dr ≡ 0 ; Dies ist erfüllt, wenn E ⊥ dr , d.h. E ⊥ Äquipotentialfläche
E-Feldlinien schneiden Äquipotentialflächen senkrecht
Beispiel: Metalle (sehr gute Leiter) enthalten kein
E-Feld (sonst Ausgleichströme)
→ überall gleiches Potential auch an
Oberfläche = Äquipotentialfläche, aus der
E-Feldlinien senkrecht austreten.
-42-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3.5 Elektrische Materialeigenschaften, Dielektrizitätskonstante
Versuch:
Festgehaltene Anordnung von n Ladungen Qν ; einmal im Vakuum, einmal
in (isolierendem, homogenen) Medium. Beide Male Messung der
r
r
r
Coulombkraft F = q ⋅ E auf eine Probeladung q am Ort ra .
Feststellung:
r
Für jedes Medium existiert eine typische Abschwächung der Kraft F und
r
damit des Feldes E um einen Faktor, der als relative Dielektrizitätskonstante ε r (dimensionslos) bezeichnet wird.
Phys. Erklärung: Im Medium reagieren gebundene Ladungen durch Verschiebung und/oder
Umorientierung auf das verursachende E-Feld (Polarisation des Mediums)
und schwächen dieses.
r
r
r
FVakuum
;
FVakuum > FMedium =
εr
Ergebnis:
und
r
r
r
EVakuum
;
EVakuum > E Medium =
εr
r
Beispiel: Feld E einer Punktladung im Vakuum und im Medium
r
EVakuum =
mit:
r
r
EVakuum
1
Q r
1
Q r
⋅ ⋅ r0 ↔ E Medium =
=
⋅ ⋅ r0
4 ⋅ π ⋅ ε0 r²
εr
4 ⋅ π ⋅ ε0 ⋅ εr r²
ε0
ε 0 ⋅ εr
εr
Dielektrizitätskonstante des Vakuums
Dielektrizitätskonstante des Mediums
relative Dielektrizitätskonstante des Mediums
-43-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3.6 Dielektrische Verschiebung
r
Mit der dielektrischen Verschiebung D wird eine mediumunabhängige Feldgröße eingeführt,
die nur von der Anordnug der Ladungen abhängt.
Def.: Dielektrische Verschiebung
r
r
r
D = ε ⋅ E = εo ⋅ εr ⋅ E
r
r ( As)² N
As
Ladung
Einheit [D] = [ε 0 ⋅ ε r ] ⋅ [E ] =
⋅
=
⇐
m² N As m²
Fläche
Beispiel: Punktladung Q im Vakuum und im Medium
r
r
v
ε0
Q r
1 Q r v
1 Q r
DVakuum = ε 0 ⋅ EVakuum =
⋅ ⋅ r0 =
⋅ ⋅ r0 : D Medium = ε 0 ⋅ ε r ⋅ E Medium =
⋅ ⋅r
4 ⋅ π ⋅ ε0 r ²
4 ⋅ π r²
4 ⋅ π r²
r
r
r
⇒ DVakuum = D Medium ⇒ D nur von Ladung , nicht von Medium abhängig
r
Ableitung einer wichtigen Eigenschaft der dielektrischen Verschiebung D in der Elektrostatik
am Beispiel einer Punktladung:
− Kugelfläche
mit Punktladung Q im Zentrum
r
− Alle E -Vektoren auf Kugelfläche gleich
lang, aber
mediumabhägig
r
− Alle D -Vektoren auf Kugelfläche gleich
lang und mediumunabhägig
Bildung des Hüllflächenintegrals:
r r
∫ D • dA
Hüllfläche = Kugelfläche
Vorgehen:
Gesamte geschlossene Oberfläche (=Hüllfläche) lückenlos durch endlich kleine,
ebene Teilflächen ∆Ai (vgl. Diskoball) darstellen. Jede Teilfläche ∆Ai ist
r
charakterisiert durch einen Flächenvektor ∆Ai mit Betrag ∆Ai = Größe der
r
∆Ai
Teilfläche und Einheitsvektor
= Richtung senkrecht auf Teilfläche und nach
∆Ai
r
r
außen zeigend. Skalarprodukt D • ∆Ai ist „Teilfluß“ ∆Φ i durch ∆Ai .
-44-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
Im Grenzübergang ∆Ai → dAi → 0 entstehen unendlich viele, infinitesimal kleine Teilflächen
r
dAi mit zugehörigen Flächenvektoren dAi und es ergibt sich eine beliebig glatte, lückenlose
Bedeckung der Hüllfläche (vgl. Übergang Polygonzug → glatte Kurve beim einfachen
r
r
Integral). Das Skalarprodukt D • dAi ist dann ein infinitesimal kleiner „Teilfluß dΦ i “ durch
r
dAi . Durch die Aufsummation über die Teilflüsse ∆Φ i und durch Grenzübergang
∆Ai → dAi → 0 bzw. ∆Φ i → dΦ i ergibt sich der Gesamtfluß Φ als Integral:
n
Φ = lim
r
∑ (D
∆Ai → 0
i =1
n→∞
i
r
r
r
• ∆Ai ) = ∫ D • dA
Für Punktladung Q gilt:
r
D zeigt radial nach außen
r r
∫ D • dA = ∫
Hüllfläche = Kugelfläche
64748
1 Q r
⋅ ⋅r •
4 ⋅π r² 0
r
dA zeigt radial
nach außen
}
r
dAr0
=
r r
r0 •r0 =1
1 Q
∫ 4 ⋅ π ⋅ r ² ⋅ dA =
aus dem Integral ,
weil konst .
6
474
8
1 Q
Q
⋅ ⋅∫ {
⋅ 4 ⋅π ⋅ r² = Q
dA =
4 ⋅ π r ² Kugelfläche 4 ⋅ π ⋅ r ²
4⋅π ⋅r ²
Allgemeiner Satz für beliebige eingeschlossene Ladung Qeingeschlossen und beliebige
einschließende Hüllfläche („Kartoffel“):
r
r
∫ D • dA = Qeingeschlossen
Hüllfläche
Hierbei kann Qeingeschlossen aus Punktladungen Qν oder aus räumlich verteilter Ladung bestehen
(„verschmierte Ladung“).
Für räumlich verteilte Ladung ist es sinnvoll, die Raumladungsdichte ρ einzuführen:
-45-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3.6.1 Raumladungsdichte ρ
Vorgehen:
Ladung Qeing. sei über das Volumen V
verteilt („Sprühnebel“). Volumen V
lückenlos in Teilvolumina ∆Vi aufteilen.
Jedes Teilvolumen ∆Vi enthält
Teilladung ∆Qi .
∆Qi
∆Vi → 0 ∆V
i
Def.: Raumladungsdichte ρ i = lim
Einheit [ρ ] =
As
m³
Die Gesamtladung Qeing. in Volumen V ergibt sich durch Aufsummation über die
Teilladungen ∆Qi in den Teilvolumina ∆Vi ( ∆Qi ≈ ρ i ⋅ ∆Vi ) und den Grenzübergang
∆Vi → dVi → 0 als Integral:
n
Qeing . = lim
∑ ∆Q =
∆Qi → 0
i =1
n →∞
i
n
lim
∑ ρ ⋅ ∆V
∆Vi → 0
i =1
n →∞
i
i
=
∫ ρ ⋅ dV
VolumenV
Damit ist die allgemeine Formulierung möglich:
r
r
∫ D • dA = Qeingeschlossen =
Hüllfläche
∫ ρ ⋅ dV
Volumen V
Dieses Gesetz ermöglicht bei einfachen und/oder symmetrischen Ladungsverteilungen die
r
r
Berechnung von D und damit E (vgl. Übungen).
-46-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
r
3.6.2 Dielektrische Verschiebung D an der Oberfläche von Leitern
Ladung Qeing. - auf elektrischen Leiter gebracht - verteilt sich auf Oberfläche
r
r
⇒ kein E -Feld (bzw. D-Feld) im Leiterinneren (sonst Ausgleichströme)
⇒ Leiteroberfläche ist Äquipotentialfläche
r
r
⇒ E -Vektoren und D-Vektoren stehen ⊥ auf Flächenelementen dAi der Oberfläche
r r r
E D dAi
r
r
∫ D • dA = Q
Es gilt weiter:
eing .
Hüllfläche = Leiteroberfläche
Beispiel: Ladung Qeing. auf leitender Vollkugel
r r
r0 •r0 =1
Qeing . =
r r
r
r ↓
•
=
⋅
•
⋅
=
D
dA
D
r
dA
r
0
∫
∫{
12r30
r
Kugeloberfläche
damit: D =
Qeing .
=ω
4π r ²
D
dA
dA
∫ D⋅ dA = D∫{
↓
konst .
4π r ²
( ω = Oberflächenladungsdichte des Leiters; Einheit [ω ] =
As
)
m²
Allgemeiner Satz:
Bei allen beliebig geformten
Leitern gilt:
r
DOF
= ω und
= Einheitsvektor ⊥ Oberfläche
D
DOF
Oberfläche ( OF )
3.6.3 Influenz
Einbringen eines ungeladenen
(zweiteiligen) Leiters in E-Feld;
Ausgleichströme und Ladungsverschiebung
r rim Leiter bis im Leiterinneren
gilt: E ≡ D ≡ 0
Verschobene Ladungen befinden sich auf
der Oberfläche daraus folgt ω Leiter als
Oberflächenladungsdichte (influenzierte
Ladung);
Es gilt: Daußen = ω
Leiter
Ladungstrennung möglich durch Trennen
der Leiterteile.
-47-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3.7 Kapazität
Die Kapazität C eines Zwei-Leiter-Systems beschreibt den Zusammenhang zwischen der
Ladung Q, die vom einen auf den anderen Leiter gebracht wird, und der dadurch verursachten
Spannung U12 zwischen den Leitern.
C=
Q
=
U 12
r r
D
∫ • dA
Hüllfläche
2
r
r
∫ E • dr
1
Formel für Berechnung von C bei speziellen Geometrien
(Kugel-, Zylinder-, Plattenkondensator) geeignet
As
= Farad = 10 3 mF = 10 6 µ F
V
Einheit [C ] =
Berechnung der Kapazität C bei speziellen Geometrien:
Vorgehensweise:
r
r
r
Q → D (mit Qeing = ∫ D • dA)
r
r
r
D r
D → E (mit = E )
ε
2
r
r r
E → U12 (mit U12 = ∫ E • dr )
→
Q
=C
U12
1
C
⇒
Q
Kapazität C bestimmt das Verhältnis
⇒
U
U
(vgl. Ohmscher Widerstand R = f (G , M ) =
)
I
Geometrie und Medium bestimmen
-48-
C=f (G,M );
Q
C=
U
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3.7.1 Kugelkondensator
(spezielle Geometrie: Kugelsymmetrie)
Leiter1 = Innenkugel (R1)
Leiter2 = Außenkugel (R2)
(Kugeln konzentrisch)
Im Inneren von Leiter1 und
Leiter2 kein E-Feld:
r r
E (r ) = 0 für r < R1 und r > R2
r r
E (r ) ≠ 0 für R1 < r < R2
r
Q→ D
r r
r
∫ D(r ) • dA
Q1 =
H . F .= Kugel
r
=
r r
D dA
∫ D(r ) ⋅ dA
=
r
D(r )= D(r )
∫ D(r ) ⋅ dA
D = konst auf H . F .
= D(r ) ⋅ ∫ dA = D(r ) ⋅ 4 ⋅ π ⋅ r 2 ; ⇒ D(r ) =
r
v
D→ E
bzw. D → E
r
E → U 12
E (r ) =
U 12
C KK
Q1
;
4 ⋅π ⋅ r2
Q1
D( r )
=
;
ε
4 ⋅π ⋅ε ⋅ r2
R2
R2
R2
R1
r r
rR
E (r ) d r 1
r
R
E (r )= E (r ) 1
r r
r
= ∫ E (r ) • dr =
r
∫ E (r ) ⋅ dr
R2
Q
C= 1
U 12
=
Q1
Q1 1
=∫
⋅−
2 dr =
r
4
⋅
π
⋅
ε
4
⋅
π
⋅
ε
⋅
r
R1
C Kugelkond =
Q1
=
U 12
=
R2
=
R1
∫ E (r ) ⋅ dr =
Q1
4 ⋅π ⋅ε
1
1
⋅ −
R1 R2
Q1
Q1 1
1
⋅ −
4 ⋅ π ⋅ ε R1 R2
R1 ⋅ R2
= 4 ⋅π ⋅ ε ⋅
R2 − R1
Kapazität des Kugelkondensator
-49-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3.7.2 Plattenkondensator
1
Q1= +Q
A1=A
Q1 Q
ω1 =
=
A1 A
2
Q2= -Q
A2=A
Q
−Q
ω2 = 2 =
← Ladungsdichte→
→
A2
A
← Leiterplatten →
← Ladung →
← Fläche →
Das Anlegen einer
äußeren Spannung U12 an
die Leiterplatten führt zu einer
Umladung
Vorgehensweise:
r
r
Q→ D → E →U
C
r
r
∫ D • dA = Q
eing
r
r
D•∆ A +
12
4 4
3
re. Stirnfläche
0
= D⋅∆ A = ∆Q
alle übrigen Fl .
r
r r
( D = 0 oder D⊥dA )
= ∆ A ⋅ ω1
2
r r
Q
D
Q
Q⋅d
→ D = ω1 = ; → E = =
; → U 12 = ∫ E • dr = E ⋅ d =
;
A
ε ε⋅A
ε⋅A
1
ε⋅A
Q
=
C=
U12
d
Kapazität des Plattenkondensators
(Fläche A; Abstand d; Dielektrische Konstante ε = ε0ε r )
-50-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3.7.3 Gesamtkapazität C bei Kondensatorschaltungen
Fall a) Serienschaltung von zwei Kondensatoren Ca und Cb
wegen
r
r
∫ E • dr ≡ 0 gilt:
Ua+Ub=U
(Maschengleichung)
Qa+ = -Qa- = Qb+ = -Qb- = Q;
Ua =
Qa +
Q
=
Ca
Ca
1
1
U = Q⋅
+
Ca Cb
Qb +
Q
=
Cb
Cb
;
Ub =
;
U 1
1
1
= =
+
Q C Ca Cb
;
oder
C=
Ca ⋅ Cb
Ca + Cb
Allgemeine Formel für n in Serie geschaltete C´s:
n
1
1
=∑
C ν =1 Cν Gesamtkapazität bei Serienschaltung von Kondensatoren
Fall b) Parallelschaltung von zwei Kondensatoren Ca und Cb
wegen
r
r
∫ E • dr ≡ 0 gilt.
Ua = Ub = U (Maschengleichung);
Q+ = Qa+ + Qb+ = -Q- = -(Qa-+Qb-)
Qa = CaUa = CaU;
Q = CaU + CbU;
Qb = CbUb = CbU;
Q
= C = Ca + Cb
U
Allgemeine Formel für n parallel geschaltete C´s:
n
C = ∑ Cν
Gesamtkapazität bei Parallelschaltung
von Kondensatoren
ν =1
-51-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3.7.4 Kapazität des Kondensators mit Geschichtetem Dielektrikum
Fall a) Feldlinien ⊥ Grenzfläche
r
r
Q → D → E → U12
Vorgehen:
C
r
r
•
= Qeing
D
dA
∫
Da ⋅ ∆ A = Db ⋅ ∆ A = ∆ Q = ∆ A ⋅ ω ;
Da = Db = D = ω =
Q
A
;
Allgemeiner Satz:
r
Die Normalkomponente von D an einer Grenzfläche
ist stetig: Dna=Dnb (Hier nur Normalkomponente)
Da
Db
D
D
=
≠ Eb =
= ;
εa
εa
εb
εb
d
d
D
D
= Ea ⋅ d a + Eb ⋅ db =
⋅ da + ⋅ db = Q ⋅ a + Q ⋅ b ;
εa
εb
A ⋅ εa
A⋅ε
123
123b
Ea =
U 12
1
Ca
U 12 1
1
1
= =
+
Q
C C a Cb
oder C =
1
Cb
Ca ⋅ Cb
; (vgl. Serienschaltung von Kondensatoren)
Ca + Cb
Fall b) Feldlinien || Grenzfläche
Vorgehen:
r
r
Q ← D ← E ← U12
C
2
Wegen
r
r
∫ E • dr = E ⋅ d = U
12
wegunabhängig
1
(durch Medium a oder b) gilt: E a = E b =
U 12
=E ;
d
Allgemeiner Satz:
r
Die Tangentialkomponente von E an Grenzfläche ist
stetig: Eta=Etb (hier nur Tangentialkomponente)
Da = εa ⋅ E a = ε a ⋅ E ≠ Da = εb ⋅ E b = εb ⋅ E
Q
Q
Da = ω 1a = 1a ; Q1a = Aa ⋅ Da ; Db = ω 1b = 1b ; Q1b = Ab ⋅ Db ;
Aa
Ab
A ⋅ε
A ⋅ε
Q1 = Q1a + Q1b = a a ⋅ U 12 + b b ⋅ U 12 ;
(vgl. Parallelschaltung
Q1
d
d
123
123
C=
= C a + Cb
von Kondensatoren)
Ca
Cb
U 12
-52-
Grundlagen der Elektrotechnik I
Kapitel 3 - Elektrostatik
3.8 Energie im elektrostatischen Feld
Energie WC , die im geladenen Kondensator
gespeichert ist.
Kondensator C ist mit Ladung Q (+Q auf Leiter1;
-Q auf Leiter2) auf Spannung U =
Q
aufgeladen.
C
Eine weitere Aufladung um dQ (+Q+dQ auf Leiter1;
-Q-dQ auf Leiter2) ist mit Arbeit dWc verbunden, da die
Ladung -dQ gegen das E-Feld über die Spannung U12
verschoben werden muß. (Aufladung technisch durch Transport negativer Elektronen)
Die an (nicht von) der Ladung -dQ geleistete Arbeit dWc ist die Energiezunahme des
geladenen Kondensators:
dWc
Verschiebung :
= −(− dQ ⋅ U 12 )
14243
(neg. Vorzeichen, weil Arbeitsleistung an und
nicht von Ladung -dQ)
neg . Ladung − dQ
Q
damit:
dWc = dQ ⋅ U 12
Q
Q
1 Q2
= dQ ; → Wc = ∫ dQ = ⋅
;
C
C
C 2
0
Wc =
Energieinhalt eines geladenen Kondensators:
Q2
C ⋅U 2 Q ⋅U
=
=
2⋅C
2
2
Einführung der Energiedichte am Beispiel des Plattenkondensators:
Energie Wc =
Energiedichte
Q ⋅U
; Volumen V = A ⋅ d ;
2
wel =
Wc 1 Q ⋅ U 1
= ⋅
= ⋅ D⋅ E
V
2 A⋅d 2
Allgemein gilt für die Energiedichte wel im E-Feld:
-53-
r r
E • D D2 ε ⋅ E 2
wel =
=
=
;
2
2⋅ε
2
Grundlagen der Elektrotechnik I
Kapitel 4 – Bewegte Ladungen
4 Bewegte Ladungen
r
4.1 Beweglichkeit µ , elektrischer Strom I , elektrische Stromdichte j
Medium mit beweglichen Ladungsträgern qi der Sorte i (z.B. Elektronen, positive und
negative Ionen usw., 1 ≤ i ≤ n ) imr E-Feld.
Gleichgewicht
r Im stationären Zustand herrscht
r
r
zwischen der elektrischer Kraft Fi = q ⋅ E und der Reibungskraft Ri = − ri ⋅ vi mit dem
r
Reibungskoeffizient ri → Einstellung einer stationären Driftgeschwindigkeit vi .
r r
r
r
qi
r
r q r
⋅ µi ⋅ E;
Fi + Ri = qi ⋅ E − ri ⋅ v i = 0; → v i = i ⋅ E =
ri
q
{i
Signum( q )
m
m2
Einheit [ µ ] = s =
V
V ⋅s
m
qi
v
= i
Beweglichkeit µi =
ri
E
;
Geschwindigkeit
el . Feldstärke
r
Berechnung der Teilchenzahl dN i von Ladungsträgern qi mit Geschwindigkeit v i und
∆N i
Teilchendichte ni = lim
, die in der Zeit dt die Fläche A durchqueren:
∆V → 0 ∆V
dV 4
647
8
r r
dN i = ni ⋅ dV = ni ⋅ l ⋅ h ⋅ b = ni ⋅ v i ⋅ {
k ⋅ b ⋅ cos α dt = ni ⋅ v i • A dt
dt ⋅v i k ⋅cos α
123
A
A⊥
dN i
, der die Fläche A durchsetzt:
dt
dN i
r r
= ni ⋅ vi • A (im Orientierungssinn der Fläche A)
dt
Teilchenstrom
-54-
Grundlagen der Elektrotechnik I
Kapitel 4 – Bewegte Ladungen
Der elektrischer Strom Ii durch die Fläche A (im Orientierungssinn der Fläche A) ist die von
dQi
den Ladungsträgern qi pro Zeiteinheit transportierte Ladung
.
dt
r
elektrischer Teilstrom
4 ji 4
8
dQi
dN i 67
r r
Ii =
= qi ⋅
= qi ⋅ ni ⋅ v i • A „zählpfeilbehafteter“ Skalar
dt
dt
elektrische Teilstromdichte
r
r
ji = qi ⋅ ni ⋅ v i
Vektor
r
r
r
j
Die Richtung (Einheitsvektor ji 0 = ri ) der Stromdichte j i ist die Richtung des Transports
ji
r
r
r
r
positiver Ladung; die Richtung von j i ist gleichgerichtet zu der von vi für qi>0 ; ( ji 0 = v i 0 )
r
r
und ist entgegengerichtet für qi<0 ; ( ji 0 = − v i 0 )
r
r
r
r
q
q
r
mit v i = i µ i ⋅ E gilt ji = qi ⋅ ni ⋅ i ⋅ µi ⋅ E = qi ⋅ ni ⋅ µi ⋅ E
1424
3
qi
qi
>0
14
2
4
3
r
vi
r
r
Alle Teilstromdichten j i sind damit gleichgerichtet zum Feldstärkevektor E
Bis jetzt nur Betrachtung einer Ladungsträgersorte i. Nun Behandlung von n LadungsträgerdQ
durch die Fläche A beitragen
sorten 1≤ i ≤ n , die zum Gesamtladungstransport
dt
(im Orientierungssinn der Fläche A) → Gesamtstrom I durch Fläche A in Zählrichtung:
n
n
dQ
r r n
r r n r r r r
= ∑ I i = ∑ ( qi ⋅ ni ⋅ v i • A) = ∑ qi ⋅ ni ⋅ v i • A = ∑ ji • A = j • A
I=
1
42
4
3
i=1
dt
r
i =1
i =1
i=1
123
ji
r
j
Gesamtstrom I durch Fläche A in Zählrichtung:
r r
I= j•A
r
Gesamtstromdichte j
r n r
j = ∑ ji
i =1
-55-
>
<
0
Einheit [ I ] = A
r
A
Einheit [ j ] = 2
m
Grundlagen der Elektrotechnik I
Kapitel 4 – Bewegte Ladungen
4.2 Ohmsches Gesetz
r n
r
j = ∑ qi ⋅ ni ⋅ µi ⋅ E
i=1
144244
3
r
r
Mit ji = qi ⋅ ni ⋅ µi ⋅ E gilt:
Leitfähigkeit σ
m
1
1
S
s
Einheit [σ ] = As ⋅ 3 ⋅
=
=
Ωm m
m V
m
n
Leitfähigkeit
σ = ∑ qi ⋅ ni ⋅ µi
i =1
daraus folgt:
r
r
j =σ ⋅E
LOKALES OHMSCHES GESETZ
oder mit spezifischen Widerstand:
σ=
r 1 r
j = ⋅E
ρ
1
ρ
U
am Beispiel eines homogenen
R
zylindrischen Mediums mit der Leitfähigkeit σ zwischen den Leiterplatten 1 und 2:
Ableitung des integralen Ohmschen Gesetzes I =
2
r r
U
U12 = ∫ E • dr =... = E ⋅ l; E = 12
l
1
Strom I durch zylindrisches Medium:
r r
U
I = j • A = j ⋅ A = σ ⋅ E ⋅ A = σ ⋅ 12 ⋅ A
l
mit R =
1 l
l
1
⋅ = ρ ⋅ und G = gilt:
σ A
A
R
Integrales Ohmsches Gesetz
I=
-56-
U12
= G ⋅ U12 ;
R
U12 = R ⋅ I
Grundlagen der Elektrotechnik I
Kapitel 4 – Bewegte Ladungen
4.3 Leistungsdichte p
Arbeit Wabi die von der Ladung qi geleistet wird bei einer Verschiebung von a nach b mit der
Spannung Uab:
Wabi = qi ⋅ U ab (vergleiche Kap. 3.3)
r
Bei infinitesimal kleiner Verschiebung dri ⇒ Uab→dU und Wabi →dWi
r r
dWi = q i ⋅ dU = q i ⋅ E • dri
Von Einzelladung qi abgegebene Leistung
r
r dri
r r
dWi
Pi =
= qi ⋅ E •
= qi ⋅ E • vi ;
dt
dt
i pro Volumeneinheit abgegebene Leistung pi:
Von allen Ladungen qi der Ladungsträgersorte
r
ji
8
r r 6474
r r r r
pi = ni ⋅ Pi = ni ⋅ q i ⋅ E • v i = ni ⋅ q i ⋅ v i • E = j i • E ;
Von allen Ladungen qi aller n Ladungsträgersorten i pro Volumeneinheit
abgegebene Leistung p:
n
n
r r n r r r r
p = ∑ pi = ∑ ( j i • E ) = ∑ ji • E = j • E
i =1
i =1
i =1
r
r
j
mit = E gilt:
σ
r r
r r j • j j2
p= j•E =
=
σ
σ
Leistungsdichte
(lokal)
Ableitung der Formel P = U ⋅ I für Gesamtleistung P am Beispiel eines homogenen,
zylindrischen Leiters
homogene
P=
∫ p dV
Verhältnisse
VolumenV
=
⋅l =U
E
}
I
j2
j ⋅l }
p ∫ dV = p ⋅ V =
⋅l ⋅ A =
⋅ j⋅ A
σ
σ
V
Damit ergibt sich:
Leistung
P=U⋅I
(integral)
oder mitU = R ⋅ I :
P =U ⋅I =
U2
= I2 ⋅ R
R
-57-
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
5 Magnetostatik
r
5.1 Experimentelle Bestimmmung der magnetischen Flußdichte B
r
Die magnetische Flußdichte B kann mit einem Probepermanentmagnet (Magnetnadel)
bestimmt werden.
r
(vgl.: E -Feld mit Probeladung q bestimmbar)
Ein Permanentmagnet hat 2 Pole. Wenn er frei drehbar im Erdmagnetfeld aufgehängt ist, dann
orientiert sich der
- magnetische N-Pol der Magnetnadel → geographischer N-Pol (=magnetischer S-Pol)
- magnetische S-Pol der Magnetnadel → geographischer S-Pol (=magnetischer N-Pol)
Gleichnamige Pole stoßen sich ab; ungleichnamige ziehen sich an
Magnetische Pole existieren nur paarweise;
Durchtrennen eines Magneten → zwei Magnete.
Die „Stärke“ eines Permanentmagneten ist gekennzeichnet durch sein magnetisches
r
Dipolmoment m (vom S-Pol zum N-Pol des Magneten zeigend) oder durch seine Polstärke
(siehe später).
r
r
B
Bei der experimentellen Bestimmung des B-Feldes müssen Richtung
und Betrag B
B
gemessen werden:
r
r
B
• Richtung
des B-Vektors = Tangente an B-Feldlinie = Richtung der Magnetnadel
B
r
r
• Betrag B des B-Vektors wird mittels des Drehmomentes M bestimmt, das die
r
Magnetnadel mit dem magnetischen Dipolmoment m bei Auslenkung um den Winkel α
r
im B-Feld erfährt.
M = m ⋅ B ⋅sin α (für Messung von B geeigneter Zusammenhang)
Dieser Zusammenhang läßt sich
vektoriell allgemein schreiben:
r
r r
M = m× B
r
Richtung des B-Feldes
-58-
r
Betrag des B-Feldes
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
5.2 Kräfte auf bewegte Ladungen und Stöme im B-Feld
5.2.1 Kraft auf einzelnen im B-Feld bewegten Ladungsträger
Experimenteller Befund bei Einschießen eines Elektrons in ein B-Feld:
r
r
r
Auf das Elektron wirkt die Ablenkkraft Fm = q el ⋅ v el × B ; (q el < 0)
r
r
Allgemein gilt für die Kraft Fm auf einen mit der Geschwindigkeit v bewegten
Einzelladungsträger q im B-Feld:
r
r r
Fm = q ⋅ v × B
Lorentzkraft
Auch dieser Zusammenhang
kann für die Messung von B
verwendet werden.
Einheit der magnetischen Flußdichte B:
[B ] =
1
[F ]
m
[ q ] ⋅ [v ]
=
VAs
N
As ⋅
m
s
=
m = Vs = Weber ;
Am
m2
m2
Vs
4
2 = 1Tesla = ( früher: 10 Gauß )
m
Erdmagnetfeld in Deutschland: B ≈ 10 −4 Tesla = (1Gauß)
-59-
(wobei 1Weber=1Vs die Einheit des
magnetischen Flusses ist)
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
5.2.2 Kraft auf stromführenden Leiter im B-Feld
Strom im Metall = Ladungstransport durch Elektronenbewegung.
r
Kraft auf ein mit der Geschwindigkeit v el bewegtes Einzelelektron:
r
r
r
Fm = q el ⋅ v el × B ;
r
Kraft auf alle Elektronen mit der Teilchendichte nel im Volumenelement = Kraftdichte f m :
r
v
r
f m = nel ⋅ q el ⋅ v el × B
142
43
r
j el
r
r
r
f m = j el × B
Damit gilt für Kraftdichte:
r
Gesamtkraft F auf stromführenden Leiter mit Volumen V:
r
F=
∫
r
r
r
f m dV = ∫ ( j el × B) dV ;
Volumen V
V
Anwendungsbeispiel: Gerader zylindrischer Leiter mit dem Strom I und der homogenen
r
r
Stromdichte j = konst. im homogenen Magnetfeld B = konst. Betrachtung eines
Leiterstückes mit Länge l und Querschnitt A.
r
r
r
r
r
r
r
F = ∫ ( j el × B)dV = ( j el × B)∫ dV = ( j el × B) ⋅ V ;
V
V
r
r r
r
mit jel = jel ⋅ e rj ; B = B ⋅ eBr ; V = A ⋅ l ; I = A ⋅ jel ;
(
)
(
)
r
r
r
r r
F = jel ⋅ e rj × B ⋅ eBr A ⋅ l = A ⋅ jel ⋅ l ⋅ B ⋅ e rj × eBr ;
123
(
r
r r
F = I ⋅ l ⋅ B ⋅ e rj × eBr
I
)
Kraft auf geraden Leiter mit Länge l und Strom I im B-Feld
-60-
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
r
5.2.3 Drehmoment M Schleife auf stromführende Leiterschleife im B-Feld
r
r
r
Drehmoment M = ( Hebelarm r ) × (Kraft F ) :
r
r
Die Kräfte F3 und F4 auf Leiter 3 und 4 tragen zum Drehmoment bezüglich Drehachse nicht
bei, da rsie parallel zur Drehachse wirken.
r
Kraft F1 auf Leiter 1 bewirkt Drehmoment M 1 mit
r
F1
6447
448
r
r r ar
rr r r
M1 = r1 × F1 = er × I ⋅ b ⋅ B e j × eB ;
1
2 r
r
Kraft F2 auf Leiter 2 bewirkt Drehmoment M 2 mit
(
)
r
r
r
r
e =− e ⇒ F =− F
2
1
j1
j2
644
744
8
r
r
r
ar
ar
r r
rr
rr
M 2 = r2 × F2 = − er × I ⋅ b ⋅ B e j × eB = er × F1 = M1
2
2
2
(
Als Gesamtdrehmoment ergibt sich:
r
r
r
r
r
r
M Schleife = M1 + M 2 = 2 ⋅ M1 = a ⋅ er × F1
r
Betrag: M Schleife = a ⋅ F1 ⋅ sin α
r
r
r
mit F1 = I ⋅ b ⋅ B ⋅ erj1 × eBr = I ⋅ b ⋅ B
r r
r
r
wegen erj1 ⊥eBr → erj1 × eBr = 1
r
F
gilt: M Schleife
6718
= a ⋅ I ⋅ b ⋅ B ⋅ sin α = A ⋅ I ⋅ B ⋅ sin α ;
-61-
)
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
r
r
r
Magnetisches Dipolmoment m einer stromdurchflossenen Leiterschleife m = A ⋅ I ⋅ e n
r
(Normalenvektor en ⊥ auf A im Rechtssinn zu Strom I)
r
Damit läßt sich das Drehmoment M schreiben:
r
r r
r r
M Schleife = A ⋅ I ⋅ B ⋅ en × eBr = m × B
r
r
wobei en × eBr = sin α
Eine stromdurchflossene Leiterschleife und eine Magnetnadel zeigen gleiches Verhalten im
B-Feld (Drehmoment, Ruhelage).
Damit kann ein Permanentmagnet über sein Dipolmoment charakterisiert werden.
Das Drehmoment auf eine stromdurchflossene Spule mit w-Windungen im B-Feld lautet:
r
r
M Spule = w ⋅ M Schleife
(Anwendungen: Elektromotor, Drehspulinstrument)
-62-
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
5.3 Erzeugung von Magnetfeldern durch Ströme
Allgemeiner Fall:
r r
Eine dreidimensionale Stromverteilung j ( r ) erzeugt ein räumliches
r r
Magnetfeld B( r )
Einfacher Spezialfall: Der Strom I durch einen unendlich langen geraden Leiter erzeugt ein
konzentrisch um den Draht verlaufendes B-Feld.
Für die magnetische Flußdichte gelten zwei wichtige Feststellungen:
1)
r
B -Linien sind geschlossene Linien (kein Anfang, kein Ende im Gegensatz zu
r
r
r
E - und D -Linien in der Elektrostatik, alle B -Linien, die in ein beliebiges Volumen
eintreten, treten aus diesem auch wieder aus.)
B-Feld ist quellenfrei
r r
∫ B • dA ≡ 0
Hüllfläche
desVolumens
2)
Das Ringintegral
r r
B
∫ • dr über die geschlossene Randkurve R, die eine Fläche A
R
r
r
umrandet, ist immer proportional zum eingeschlossenen Strom I eing = ∫ j • dA , der
A
durch die Fläche A fließt.
-63-
Grundlagen der Elektrotechnik I
r r
∫R B • dr
12
4 4
3
Kapitel 5 - Magnetostatik
= c ⋅ I eing
c: mediumabhängige
Proportionalitätskonstante
Ringintegral entlang
geschlossener Randkurve
Konvention: Ieing wird positiv genommen, wenn seine Zählrichtung mit Umlaufsinn der
Randkurve R eine Rechtsschraube bildet.
r r
Ω⋅s
B
Für Vakuum gilt: ∫ • dr = µ 0 ⋅ I eing mit absoluter Permeabilität µ0 = 4 ⋅ π ⋅ 10 − 7
m
R
Für ein homogenes Medium gilt:
r r
∫ B • dr = µ0 ⋅ µr ⋅ I eing
R
mit relativer Permeabilität µr (dimensionslos) zur Charakterisierung der magnetischen
Eigenschaften des Mediums
-64-
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
r
5.4 Magnetische Feldstärke H
r r
Um eine mediumunabhängige, nur von der Stromverteilung j ( r ) bestimmte magnetische
r
Feldgröße zu erhalten, wird die magnetische Feldstärke H eingeführt:
Magnetische Feldstärke
Einheit [ H ] =
r
r
B
H=
µ0 ⋅ µr
[I ] A
1000 A
= ; (veraltet 1 Oersted =
⋅ )
[ dr ] m
4 ⋅π m
r
vgl. E-Statik: zuerst Feldstärke E (Kraftwirkung,
mediumabhängig)
r
dann dielektr. Verschiebung D (nur von Ladungsverteilung, nicht vom
Medium abhängig)
Aus
r
r
∫ B • dr = µ
0
⋅ µ r ⋅ I eing ergibt sich für die magnetische Feldstärke als
mediumunabhängiges Erzeugungsgesetz:
Durchflutungsgesetz
r
r
r
r
∫ H • dr = I eing = ∫ j • dA
R
A
Dieses Gesetz gilt immer und in jedem Medium. Bei einfacher Geometrie kann damit aus
r
gegebener Stromverteilung j die magnetische Feldstärke bestimmt werden.
r
r
(vgl.: ∫ D • dA =Qeing = ∫ ρ ⋅ dV )
Vergleich:
Magnetostatik:
Ströme erzeugen Magnetfeld; wo Ströme, dort Magnetfeld; wo Magnetfeld, dort Ströme
Elektrostatik:
Ladungen erzeugen elektrisches Feld; wo Ladungen, dort E-Feld; wo E-Feld, dort Ladungen
-65-
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
Einfache Anwendungsbeispiele für das Durchflutungsgesetz
1) H-Feld des Stromes I, der in einem unendlich langen Leiter fließt
Zylinderkoordinaten: r, ϕ, z
r r r
Einheitsvektoren: er , eϕ , ez
H-Feld (allgemein):
r
r
r
r
H = H r er + Hϕ eϕ + H z ez ;
Aus Symmetriegründen und wegen der
Geschlossenheit der H-Linien sind diese
Linien Kreise.
=0
=0
r }
r
r }
r
H = Hr er + Hϕ eϕ + H z ez
Als Randkurve R (darf beliebig sein) wird
r
r
ein Kreis gewählt, damit gilt dr = r ⋅ dϕ ⋅ eϕ ;
r r
r
r
H
∫ • dr = ∫ Hϕ eϕ • r ⋅ dϕ ⋅ eϕ = ∫ Hϕ r ⋅ dϕ
R= Kreis
R
I
Hϕ =
2π ⋅ r
R
>
<
Hϕ und r auf
Kreis konst .
=
Hϕ r ⋅ ∫ dϕ = Hϕ r ⋅ 2π = I
r
H = Hϕ =
0
R
I
;
2π ⋅ r
H-Feld des Stromes I in unendlich langen, geraden Leiter (Rechtsschraube)
-66-
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
2) H-Feld innerhalb einer Spule (lang, dünn, gerade) mit Spulenstrom I und w Windungen auf
Länge lsp
∫
r
r
H • dr =
r
r
H
∫l • dr +
1
1
4
24
3
r r
H dr
H = konst
≈0
678
r
r
H • dr
∫
l2 + l3 + l 4
142 43
= I eing
wegen H sehr klein außerhalb der Spule und
H ⊥ auf Integrationsweg innerhalb der Spule
r
w ⋅ l1
r
•
=
=
⋅
≈
=
⋅I
H
dr
H
dr
H
l
I
1
eing
∫l
∫l
l
sp
1
1
H≈
w
I
lsp
H-Feld in Spule (lang, dünn, gerade); Spulenstrom I;
Windungszahl w; Länge lsp
Anmerkung:
r
Der Strom I bzw. die Stromdichte j im vollständigen Durchflutungsgesetz (MaxwellGleichung) ist die Summe aus
r
r
Konvektionsstrom ( j Konv = ∑ ni ⋅ q i ⋅ v i ; Ladungsträgertransport) und Verschiebungsstrom
r
r
∂D
( j versch =
; auch ohne Ladungsträger).
∂t
-67-
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
5.5 Magnetfeldberechnung mit Gesetz von BIOT - SAVART
r r
Dieses Verfahren ist prinzipiell anwendbar bei beliebiger Stromverteilung j ( r )
(→ numerische Integration).
Hier Anwendung bei Strom I in beliebig geformten Leiter.
r r
r
I dl × rQA
dH =
4π rr 3
QA
r
dl : Leiterelement
r
rQA : Verbindungsvektor
r
H=
Leiterende
r
I
=
dH
∫
4π
Leiteranfang
r r
dl × rQA
∫ rr 3
L . A.
QA
L. E .
BIOT - SAVART
Einfache Anwendungsbeispiele des Gesetzes von Biot - Savart:
1) H-Feld des Stromes I, der in einem unendlich langen, geraden Leiter fließt
r r r
Zylinderkoordinaten: r , ϕ , z; er , eϕ , ez
r r
r
dl
× rQA
I
dH =
;
4π rr 3
QA
mit:
r
r r
r
r
dl = dz ⋅ ez ⇒ dl × rQA = dz ⋅ rQA ⋅ sin(π − α ) ⋅ eϕ
r
I sin (π − α )
r
dH =
dz ⋅ eϕ ;
2
4π
rQA
-68-
Grundlagen der Elektrotechnik I
mit sin(π − α ) = sin α =
r
rQA
r
I r
I ⋅r
r
⇒ dH =
3 dz ⋅ eϕ =
4π rQA
4π
r z =+∞ I ⋅ r
H= ∫
4π
z =−∞
dz
(r
2
3
+ z2)2
Kapitel 5 - Magnetostatik
; und rQA = r 2 + z 2 ;
dz
(r
2
+z
3
2 2
)
r
⋅ eϕ ;
r
z ⋅ eϕ
Bronstein I ⋅ r
r
⋅ eϕ =
=
Nr. 206
4π r 2 ⋅ r 2 + z 2
r I ⋅r 2 r
I
r
H=
⋅ 2 ⋅ eϕ =
⋅ eϕ
4⋅π r
2⋅π ⋅ r
z =+∞
z =−∞
(vgl. Ableitung mit Durchflutungsgesetz)
H-Feld des Stromes I, der in einem unendlich langen, geraden Leiter fließt
2) H-Feld im Zentrum eines ebenen Kreisstromes I (Radius r)
r r
r
dl
× rQA
I
dH =
;
4π rr 3
QA
r
r
r
r
mit dl = r ⋅ dϕ ⋅ eϕ und rQA = − r ⋅ er
r
r
r
I r ⋅ dϕ ⋅ eϕ × (− r ⋅ er )
dH =
4π
r3
r
I 1
r r
dH =
dϕ ⋅ er × eϕ ;
12
3
4π r
r
ez
r ϕ = 2⋅π
H= ∫
ϕ =0
I
I
r
dϕ ⋅ ez =
⋅
4 ⋅π ⋅r
4 ⋅π ⋅ r
ϕ = 2⋅π
I r
r
d
e
ϕ
⋅
=
∫ϕ =0 z 2 ⋅ r ez ;
H-Feld im Zentrum eines ebenen Kreisstromes I (Radius r)
-69-
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
5.6 Magnetische Materialeigenschaften
5.6.1 Diamagnetismus
µr < 1
Prinzipiell bei allen Materialien vorhanden (vorzugsweise bei
Elementen mit abgeschlossenen Elektronenschalen), jedoch teilweise
vernachlässigbar;
Kopplung des Elektronen- Bahnmomentes an B-Feld →
Präzession der Elektronenbahn,
dadurch entstehen inneratomare Ringströme; diese (Wirkung)
schwächen mit ihrem B-Feld das äußere B-Feld
(Ursache; Lenz´sche Regel).
5.6.2 Paramagnetismus
µr > 1
Äußeres B-Feld richtet die magnetische Momente bei Elementen mit
nicht abgeschlossenen Elektronenbahnen (resultierende magnetische
Momente) der Atome aus; Dadurch Verstärkung des äußeren
B-Feldes; Temperaturbewegung wirkt Ausrichtung entgegen (CurieGesetz).
5.6.3 Ferromagnetismus
µr >> 1
Kristallbereiche gleicher Magnetisierung (gleichgerichtete
Spinmomente der Elektronen); äußeres B-Feld führt zu einem
Umklappen ganzer Bezirke (Weiß´sche Bezirke). Oberhalb
ferromagnetischer Curietemperatur keine Ausrichtung mehr.
Hysteresekurve:
-70-
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
5.7 Magnetfeld an Grenzflächen
Gesetzmäßigkeiten an Trennfläche von Medium 1 und Medium 2
r
1) Normalkomponente von B ist stetig
B n1 = B n 2 ;
Beweis:
r
r
∫. B. • dA = 0;
H4
F 24
1
3
r r
r r
A1 • Bn1 + A2 • Bn 2 +
ε
vernachlässigbarer
Beitrag der
Schmalseiten
= 0;
− A1 ⋅ Bn1 + A2 ⋅ Bn 2 = 0; mit A1 = A2 ⇒ B n1 = B n 2
r
2) Tangentialkomponente von H ist stetig
H t1 = H t1
Beweis:
r r
∫ H • dr = I eing = 0;
≈0
≈0
r
r
r r 678
r r
r r 678
r r
r
H1 + H 2
mit
l1 • H1 + l3 • H 1 + l 2 • H 2 + l 4 • H 1 = 0
H =
≈0
2
≈0
2
1
2
− l1 ⋅ Ht 1 + l2 ⋅ Ht 2 = 0; mit l1 = l 2 ⇒ H t 1 = H t 2
3) Brechungsgesetz
tg α1 µ1
=
tg α2 µ2
Bt 1 µ1 H t 1
=
B n1
Bn1
B
µ H
tg α 2 = t 2 = 2 t 2
Bn 2
Bn 2
tg α 1 =
-71-
2
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
5.8 Magnetische Kreise, Induktionskoeffizienten
5.8.1 Magnetischer Einzelkreis
a) Spule um Eisenkern ohne Luftspalt
Es gilt das Durchflutungsgesetz:
r r
∫ H • dr = I eing = w ⋅ I ;
RK
wobei:
− geschlossene Randkurve RK = Weg lFE im
Eisen
− Zusammenhang Zählrichtung I → Richtung
r
H : Rechtsschraube
r
r
− Wegelemente dr magnetische Feldstärke H Fe
Damit ergibt sich:
r
r
∫ H • dr = H
Fe
⋅ l Fe = w ⋅ I ;
mit H Fe =
RK
und BFe = µ0 ⋅ µ Fe ⋅ H Fe =
w⋅ I
l Fe
µ0 ⋅ µ Fe
⋅ w⋅ I ;
l Fe
Einführung des magnetischen Flusses Φ:
Definition:
Magnetischer Fluß Φ
durch Fläche A
Φ=
r r
∫ B • dA
Fläche A
V ⋅s 2
m = V ⋅ s = 1Weber;
m2
Einheit:
[Φ] = [ B][ A] =
Spezialfall:
r r
r
Wenn BFe = konst. auf Fläche AFe und zudem BFe AFe , dann gilt Φ = BFe ⋅ AFe
Da diese Voraussetzungen im Eisenkern (näherungsweise) erfüllt sind, gilt:
µ ⋅µ ⋅ A
Φ = BFe ⋅ AFe = 0 Fe Fe ⋅ w ⋅ I ;
l Fe
14
42
44
3
1/ RmFe
-72-
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
Mit Einführung der Größen
• „Magnetische Spannung“ wI
• „Magnetischer Widerstand“ Rm
Rm =
l
A ⋅ µ0 ⋅ µr
ergibt sich das „Ohm´sche Gesetz des magnetischen Kreises“ (vgl . I ⋅ R = U )
Φ ⋅ Rm = w ⋅ I
Für spätere Anwendungen ist es sinnvoll, den verketteten magnetischen Fluß Ψ einzuführen,
der das Produkt von Windungszahl w einer Spule und magnetischem Fluß Φ durch die Spule
darstellt.
Definition:
verketteter magnetischer Fluß
w 2 ⋅ µ0 ⋅ µFe ⋅ AFe
Ψ = w⋅Φ =
⋅I
l Fe
1442443
L
Der Proportionalitätsfaktor L zwischen verketteten magnetischen Fluß Ψ und Strom I in der
Spule wird als Selbstinduktionskoeffizient bezeichnet.
Ψ = L⋅ I
Damit gilt:
b) Spule um Eisenkern mit Luftspalt
Das Durchflutungsgesetz
r
r
∫ H • dr = I
eing
= w⋅ I
RK
ist jetzt entlang der Randkurve RK durch das
Eisen (lFE) und den Luftspalt (lL) anzuwenden.
Unter den entsprechenden Annahmen wie vorher
ergibt sich:
r
r
∫ H • dr = H
Fe
⋅ l Fe + H L ⋅ l L = w ⋅ I
RK
BFe
BL
BFe ⋅ l Fe BL ⋅ l L
bzw. H L =
gilt:
+
= w ⋅ I (Gleichung ☺)
µo ⋅ µFe
µo ⋅ µL
µo ⋅ µFe µo ⋅ µL
r
r
Wegen Quellenfreiheit des magnetischen Flusses ( ∫ B • dA ≡ 0 ) sind die magnetischen
und mit H Fe =
H .F .
Flüsse im Eisen und im Luftspalt gleich: Φ Fe = Φ L = Φ ;
-73-
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
Mit den Flußdichten im Eisen und im Luftspalt: B Fe =
Φ⋅
lautet Gleichung ☺:
Φ
Φ
; BL =
;
AFe
AL
l Fe
lL
+ Φ⋅
= w⋅ I ;
AFe ⋅ µo ⋅ µ Fe
A L ⋅ µo ⋅ µ L
14
4244
3
14243
RmFe
RmL
Damit ergibt sich die „Maschengleichung“ im magnetischen Einzelkreis:
Φ ⋅ RmFe + Φ ⋅ RmL = w ⋅ I
vgl. Maschengleichung im Einzelstromkreis mit denWiderständen R1 und R2 in Serie:
lγ
ργ ⋅ lγ
I ⋅ R1 + I ⋅ R2 = U mit Rγ =
=
Aγ
Aγ ⋅ σ γ
Verketteter Fluß Ψ und Selbstinduktionskoeffizient L:
Ψ = w⋅Φ = w⋅
Einheit [ L] =
w⋅ I
= L⋅ I
RmFe + RmL
w2
mit L =
RmFe + RmL
[Ψ] V ⋅ s
=
= Ω ⋅ s = Henry
[I ]
A
5.8.2 Verkopplung magnetischer Kreise
-74-
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
Durchflutungsgesetz kann im linken (l1,l3) und im rechten (l2,l3) Magnetkreis angewandt
werden:
linker magnetischer Kreis
r r
∫ H • dr = w1 ⋅ I1
rechter magnetischer Kreis
r r
∫ H • dr = w2 ⋅ I 2
H1 ⋅ l1 + H 3 ⋅ l 3 = w1 ⋅ I 1
H 2 ⋅ l 2 − H 3 ⋅ l3 = w 2 ⋅ I 2
⇓
⇓
B1
B3
⋅ l1 +
⋅ l = w1 ⋅ I 1
µ 0 ⋅ µ Fe
µ 0 ⋅ µ Fe 3
⇓
B2
B3
⋅ l2 −
⋅ l = w2 ⋅ I 2
µ0 ⋅ µ Fe
µ0 ⋅ µ Fe 3
RK links
Φ1 ⋅
RK rechts
⇓
l1
l3
+ Φ3 ⋅
= w1 ⋅ I 1
A1 ⋅ µ0 ⋅ µ Fe
A3 ⋅ µ0 ⋅ µ Fe
Φ2 ⋅
l2
l3
− Φ3 ⋅
= w2 ⋅ I 2
A2 ⋅ µ0 ⋅ µ Fe
A3 ⋅ µ0 ⋅ µ Fe
⇓
⇓
(I) Φ1 ⋅ Rm1 + Φ 3 ⋅ Rm3 = w1 ⋅ I1
(II) Φ 2 ⋅ Rm2 − Φ 3 ⋅ Rm3 = w2 ⋅ I 2
Wegen Quellenfreiheit des B-Feldes (
r
r
•
≡ 0 ) gilt außerdem für den Knotenpunkt:
B
dA
∫
H .F .
r r
(III) Φ1 = Φ 2 + Φ 3 vgl. I1 = I 2 + I 3 aus ∫ j • dA ≡ 0
H .F .
Aus den 3 Gleichungen (I), (II), (III) werden die Flüsse Φ1 , Φ 2 , Φ 3 bestimmt:
w1 ⋅ I1 ⋅ ( Rm 2 + Rm3 ) + w2 ⋅ I 2 ⋅ Rm3
;
N
w2 ⋅ I 2 ⋅ ( Rm1 + Rm3 ) + w1 ⋅ I1 ⋅ Rm3
Φ2 =
; Abkürzung: N = Rm1 Rm2 + Rm2 Rm3 + Rm 3 Rm1
N
w1 ⋅ I1 ⋅ Rn 2 − w2 ⋅ I 2 ⋅ Rm1
Φ3 =
;
N
Φ1 =
Verkettete magnetische Flüsse und Induktionskoeffizienten [hierbei Unterscheidung zwischen
Ort der Ursache (2. Index) und Ort der Wirkung (1. Index)]
Ψ11
Ψ12
6444
47
4444
8 6447
448
w1 ⋅ ( Rm2 + Rm3 )
w ⋅R
Ψ1 = w1 ⋅ Φ1 = w1 ⋅
⋅ I1 + w1 ⋅ 2 m3 ⋅ I 2 ;
14442N
4443
142N
43
L11
L12
Ψ22
Ψ21
474444
8
6447
448 6444
w
⋅
R
+
R
w ⋅R
2 ( m1
m3 )
Ψ2 = w2 ⋅ Φ 2 = w2 ⋅ 1 m3 ⋅ I1 + w2 ⋅
⋅ I2 ;
142N
43
14442N
444
3
L21
L22
-75-
Grundlagen der Elektrotechnik I
Kapitel 5 - Magnetostatik
Die verketteten Flüsse sind den jeweils erzeugenden Strömen proportional.
Mit den Selbstinduktionskoeffizienten L11 und L22
und den Gegeninduktionskoeffizienten L12 und L21 gilt:
Ψ1 = L11 ⋅ I1 + L12 ⋅ I2 ;
Ψ2 = L21 ⋅ I1 + L22 ⋅ I 2 ;
(hieraus werden später die
Trafogleichungen abgeleitet)
Als Maß für die gegenseitige Durchdringung der Spulen durch ihre Magnetflüsse wird der
Kopplungsfaktor k eingeführt:
k=
Φ 12 Φ 21
⋅
=
Φ 22 Φ 11
L12 ⋅ I 2
w1
L22 ⋅ I 2
w2
L21 ⋅ I 1
w2
=
L11 ⋅ I 1
⋅
w1
⋅
L12 L21
⋅
=
L22 L11
-76-
L12
L22 ⋅ L11
Grundlagen der Elektrotechnik I
Kapitel 6 - Induktion
6 Induktion
Induktion = Spannungserzeugung durch zeitliche Änderung magnetischer Flüsse
6.1 Induktion einer Spannung in einer Leiterschleife durch zeitliche Änderung
des umschlossenen magnetischen Flusses
r r
Magnetischer Fluß Φ durch Fläche A: Φ = ∫ B • dA ;
(vgl. Kapitel 5.8)
A
Der Fluß Φ durch Fläche A ist eine skalare Größe, der in positiver Zählrichtung mit der
Orientierung der Fläche A übereinstimmt (vgl. Strom I durch Fläche A).
Konvention:
→ Wahl eines Umlaufsinnes ULS in der Leiterschleife
→ Rechtsläufige Zuordnung: Umlaufsinn ULS
→ positive Zählrichtung von Φ, bzw.
→ Orientierung der Fläche A
→ Zählrichtungen von Spannung U, elektromotorischer Kraft EMK und Strom I in der
Leiterschleife im ULS
-77-
Grundlagen der Elektrotechnik I
Kapitel 6 - Induktion
Mit Konvention (bei anderer Festlegung andere Vorzeichen) gilt (experimentelles Ergebnis):
dΦ
U ab =
dt
dΦ
;
EMK ab = −
dt
Induktionsgesetz für eine Leiterschleife, die von magnetischem Fluß Φ durchsetzt wird
(induzierte Spannung Uab= zeitliche Änderung
dΦ
des umschlossenen magn. Flusses Φ)
dt
Für w Leiterschleifen (=Spule mit w Windungen), die alle vom gleichen magnetischen Fluß Φ
durchflossen werden, gilt:
dΦ dwΦ dΨ
=
=
;
U ab = w ⋅
dt
dt
dt
dΦ
dΨ
;
EMKab = − w ⋅
=−
dt
dt
Induktionsgesetz für Spule mit w Windungen
r
Zusammensetzung des magnetischen Flusses Φ bzw. der magnetischen Flußdichte B
Die magnetische Flußdichte B innerhalb der Leiterschleife setzt sich aus zwei Anteilen
r r
r
zusammen:
B = B a + Bi
r
Bi =
r
Ba =
„inneres“ Magnetfeld: vom eigenen Strom in der Leiterschleife erzeugt
(Bsp. „Drosselspule“)
„äußeres“ Magnetfeld: von äußeren Strömen erzeugt
(Bsp.: B-Feld in Sekundärspule eines Trafos, erzeugt vom „äußeren“ Strom in der
Primärspule, Blitzeinschlag, EMV, NEMP usw.)
-78-
Grundlagen der Elektrotechnik I
Entsprechend gilt für Φ :
Kapitel 6 - Induktion
r
r
r
r
r
r
Φ = ∫ B • dA = ∫ B a • dA + ∫ Bi • dA = Φ a + Φ i ;
A
A
A
mit „äußerem“, fremderzeugten Fluß Φ a und „innerem“,
eigenerzeugten Fluß Φ i .
Zeitliche Flußänderung
dΦ dΦ a dΦ i
=
+
dt
dt
dt
dΦ
in der Leiterschleife
dt
Ursachen der magnetischen Flußänderung
dΦ
des magnetischen Flusses Φ durch die Leiterschleife hat zwei
dt
mögliche Ursachen, die einzeln oder gemeinsam auftreten können:
Die Flußänderung
1. Geometrieänderung:
Die Fläche A der Schleife ändert sich (Lage und/oder Formänderung) in einem zeitlich
konstanten B-Feld. Diese Flächenänderung ist immer verknüpft mit der Bewegung
r
(Geschwindigkeit v ) von Leiterteilen.
dΦ
Änderung von A ⇒
dt vr
2. Magnetfeldänderung
r r
Die magnetische Flußdichte B(r , t ) und damit der Fluß Φ( t ) ändern sich in zeitlich
geometrisch unveränderter Leiterschleife.
r
r ∂ B •r
dΦ
Änderung von B :
= B ≠ 0 ⇒
dt B•r
∂t
Für die gesamte Flußänderung
dΦ
gilt damit:
dt
dΦ dΦ
dΦ
=
+
•r
dt dt vr dt B
-79-
Grundlagen der Elektrotechnik I
Kapitel 6 - Induktion
r
Beispiele zum Induktionsgesetz bei zeitlicher Änderung der magnetischen Flußdichte B
und unveränderter Geometrie:
dΦ
Flußänderung
ist verursacht durch Magnetfeldänderung und nicht durch
dt
dΦ dΦ
=
Geometrieänderung
.
dt dt B•r
r
1) Spule („Drosselspule“) nur mit „innerem“ Magnetfeld Bi , das vom Spulenstrom I erzeugt
r
wird. ( Ba ≡ 0)
Im Inneren der Spule gilt mit Näherungsformel für lange, dünne Spule (vgl. Kap5.4):
Hi ≈
w
⋅ I;
lsp
↓
Bi = µ0 ⋅ H i ≈ µ0 ⋅
Φ i = Asp ⋅ Bi ≈
Eigenerzeugter „innerer“ Fluß
w
⋅ I;
lsp
µ0 ⋅ w ⋅ Asp
⋅ I ; (Näherung)
l sp
Fremderzeugter „äußerer“ Fluß Φ a ≡ 0;
U ab
w 2 ⋅ µ0 ⋅ Asp dI
dΦ
dΦ i
= w⋅
⋅ ;
= w⋅
≈
dt B•r
dt B•r
lsp
dt
Mit Definition Selbstinduktion L =
U ab
dI
= L⋅
dt
w 2 ⋅ µ0 ⋅ Asp
lsp
=
l sp
w2
; wobei Rm =
; gilt:
Rm
µ0 ⋅ Asp
dI
und induzierter
dt
Spannung Uab in einer Spule, mit der Selbstinduktion L
Zusammenhang zwischen Stromänderung
-80-
Grundlagen der Elektrotechnik I
Kapitel 6 - Induktion
2) Spule im Leerlauf ( Rab = ∞; → I ≡ 0; → Bi ≡ 0; → Φ i ≡ 0; ) im zeitlich veränderlichen,
r
homogenen Fremdmagnetfeld Ba ( t )
r
r
Φ = Φ a = Asp • Ba ( t )
r
r
dΦ
dBa
U ab = w ⋅
= w ⋅ Asp •
dt
dt;
3) Spule mit Widerstand R belastet ( 0 < R < ∞ ) im zeitlich veränderlichen, homogenen
r
Fremdmagnetfeld Ba ( t ) .
r
r
Φ a = Asp • Ba (t ) ;
Φi ≈
w ⋅ µ0 ⋅ Asp
l sp
(Näherung)
⋅ I (t ) ;
Φ = Φa + Φi ;
U ab
r
r dBa
w 2 ⋅ µ 0 ⋅ Asp dI
dΦ a
dΦ i
dΦ
= w ⋅
+ w⋅
≈ w ⋅ Asp ⋅
+
⋅
;
= w⋅
dt B•r
123
dt
dt
dt
l sp
dt
r
1 42 43
F
Selbstinduktuvität L
U ab = − I ⋅ R ≈ F ⋅
dBa
dI
+ L⋅ ;
dt
dt
r
r dBa
dI
L ⋅ + I ⋅ R ≈ −F •
= f (t )
dt
dt
Inhomogene, gewöhnliche DGL 1. Ordnung für I(t);
dI
dBa
r
= f (t )
Spezialfall: Ba -Feld in Richtung der Spulenachse: L ⋅ + I ⋅ R ≈ − F ⋅
dt
dt
dBa
Überlegung: Einschalten eines äußeren Magnetfeldes
> 0;
dt
dBa
dΦ a
dI
dB
dΦ i
>0→
>0→
<0→ i <0→
<0
dt4442444
dt 3
dt
dt4442444
dt 3
1
1
Ursache
Wirkung
-81-
„Lenzsche Regel“ erfüllt
Grundlagen der Elektrotechnik I
Kapitel 6 - Induktion
Bis jetzt nur Beispiele des Induktionsgesetzes, bei denen sich die magnetische Flußdichte
r r
r
B = Ba + Bi ändert; Form und Lage der Leiterschleife blieben unverändert. Berechnung von
dΦ
Spannung Uab erfolgte ausschließlich über Flußänderung
. Jetzt Beispiel mit
dt
r
dB
Formänderung der Leiterschleife im zeitlich konstanten B-Feld (
≡ 0)
dt
Beispiel zum Induktionsgesetz bei Geometrieänderung der Leiterschleife im zeitlich
dΦ dΦ
konstanten B-Feld:
=
dt dt vr
Hierbei sind zwei Methoden zur Berechnung der Spannung Uab möglich:
dΦ dΦ
=
Methode 1: Wieder über Flußänderung
dt dt vr
r
Methode 2: Über Lorentzkraft FL , die auf im B-Feld bewegte Ladungsträger wirkt.
Damit ist Methode 1 sowohl bei Magnetfeldänderung, als auch bei Geometrieänderung
anwendbar, Methode 2 ist nur bei bewegten Leiterteilen (Geometrieänderung) anwendbar.
Beispiel:
Geometrieänderung der Leiterschleife durch Verschieben eines Bügels. (Bügel auf
r
r
zwei Leiterschienen, äußeres Magnetfeld Ba = konst , inneres B-Feld Bi ≡ 0 , da
Klemmen ab im Leerlauf ( Rab = ∞ ) → Leiterstrom I=0)
1. Methode:
dA4
678
B a ⋅ b ⋅ v ⋅ dt
dΦ a
dΦ
= Ba ⋅ b ⋅ v;
=
=
dt vr dt vr
dt
dΦ
U ab =
= Ba ⋅ b ⋅ v
dt vr
Flächenänderung
(B
i
≡ 0)
dA
dΦ
dΦ
= → Flußänderung
→ induzierte Spannung U ab =
dt vr
dt vr
dt
-82-
Grundlagen der Elektrotechnik I
2. Methode:
Kapitel 6 - Induktion
r
r r
Auf Ladungsträger q im bewegten Bügel wirkt die Lorentzkraft FL = q ⋅ v × B ;
Wenn auf einen Ladungsträger eine Kraft wirkt, die proportional zu seiner Ladung q ist, dann
kann eine
r Feldstärke = Kraft / Ladung definiert werden (vgl. E-Feld in der Elektrostatik:
r F
r
E = el ). Im vorliegenden Fall kann analog eine induzierte Feldstärke Ei definiert werden:
q
r
r FL r r
Kraft
=v×B=
Ei =
q
Ladungsträger
Definition: Induzierte Feldstärke
r
r
Im bewegten Metallbügel können beide Feldstärken ( Ee und Ei ) auftreten, so daß auf einen
Ladungsträger die resultierende Kraft F wirkt:
r
r
r
F = q ⋅ Ee + Ei
(
)
r
r
r
Wenn sich diese Feldstärken nicht kompensieren ( Ee + Ei ≠ 0 ) folgt für die Kraft F ≠ 0 und
die Ladungsträger werden sich bewegen und damit eine Stromdichte erzeugen, für die bei
r
r 1 r
einem spezifischen Widerstand ρ des Leiters das Ohm´sche Gesetz gilt: j = ⋅ Ee + Ei
ρ
(
)
Im vorliegenden Beispiel folgt wegen Rab = ∞ für den Strom: I = 0
Damit gilt im Metallbügel:
r
keine Stromdichte j = 0 ⇒ keine resultierende Kraft auf die
r
r
r
Ladungsträger (Elektronen) F = q ⋅ Ee + Ei = 0 ⇒ Feldstärken
(
)
bzw. Kräfte auf einen Ladungsträger wirken einander entgegen
r
r
und kompensieren sich: E e = − E i
Für I=0 gilt außerdem:
b
r
r
Spannung U ab = ∫ E e • dr
a
b'
r
r
= ∫ E e • dr
a'
b
=
r
∫E
beliebiger Weg
von a nach b a
e
r
• dr
ULS →
=
r
E e = 0 auf
Zuleitungen
b'
b'
r
r
r
r r
= r r ∫ (− E i ) • dr = ∫ − (v × B) • d r
wg I = 0→ E e = − Ei
14
4244
3
a'
a'
im Bsp .> 0
r r
r
mit B = Ba und Bi ≡ 0 (nur Fremdfeld, kein Eigenfeld wegen I=0)
r r r
ergibt sich für das vorliegende Beispiel mit v ⊥B⊥dr als Ergebnis:
U ab = B a ⋅ v ⋅ b;
-83-
Grundlagen der Elektrotechnik I
Kapitel 6 - Induktion
b r
r b' r
r b' r r
r
Für die EMKab gilt: EMK ab = ∫ E i • dr = ∫ E i • dr = ∫ v × B • dr = −U ab ;
123
a
!
!
a'
ULS →
a'
(
)
r
EMK tritt nur in Leiterteilen mit E i ≠ 0 auf, nicht jedoch in einem äußeren
r
angeschlossenem Widerstand R (dort Ei = 0 )
r
Für die induzierte Feldstärke Ei gilt:
r
r
∫ E • dr ≠ 0 ,
i
r
wogegen für die elektrostatische Feldstärke Ee immer erfüllt ist:
r
∫E
e
r
• dr = 0
6.2 Anwendungen des Induktionsgesetzes
6.2.1 Transformator
Der Trafo ermöglicht die nichtgalvanische Verkopplung von zwei Stromkreisen zwecks
Spannungs-, Strom- und Leistungsübertragung. Trafo = zwei Spulen mit verketteten Flüssen
(1. Index = Ort der Wirkung)
Ψ1 = Ψ11 + Ψ12 und Ψ2 = Ψ22 + Ψ21
(2.Index = Ort der Ursache)
Ψ1 ( t ) = L11 ⋅ I 1 ( t ) + L12 ⋅ I 2 ( t ) und Ψ2 ( t ) = L22 ⋅ I 2 ( t ) + L21 ⋅ I 1 ( t ) ;
Mit dem Induktionsgesetz u = w ⋅
u1 ( t ) und u2 ( t ) :
dΦ dΨ
=
gilt für die induzierten Spannungen
dt
dt
dΨ1 ( t )
dI 1
dI 2
= L11 ⋅
+ L12 ⋅
;
dt
dt
dt
d Ψ2 ( t )
dI 1
dI 2
= L21 ⋅
+ L22 ⋅
;
u2 ( t ) =
dt
dt
dt
u1 ( t ) =
„Trafo-Gleichungen“
-84-
Grundlagen der Elektrotechnik I
Kapitel 6 - Induktion
6.2.2 Einzelne Spule („Drosselspule“, vgl. Kap. 6.1)
Der verkettete Fluß Ψ1 ( t ) wird nur vom Spulenstrom I1 erzeugt; es existiert kein Beitrag
=0
}
äußerer Ströme Ψ1 = Ψ11 + Ψ12 ;
→
Ψ1 ( t ) = Ψ11 ( t ) = L11 ⋅ I 1 ( t ) ;
Die Indizierung kann entfallen, weil nur eine Spule vorhanden ist. Ψ(t ) = L ⋅ I ( t ) ;
Mit Induktionsgesetz gilt:
u( t ) =
dΨ ( t )
dI ( t )
;
= L⋅
dt
dt
Das Anlegen einer Spannung u(t ) an eine Drosselspule bewirkt eine
dI
;
Stromänderung
dt
6.2.3 Magnetische Energie Wm und magnetische Energiedichte wm
Die elektrische Leistung, die einer Spule zugeführt wird, lautet:
di( t )
p el ( t ) = u( t ) ⋅ i( t ) = L ⋅
⋅ i( t )
dt
Die im Magnetfeld der Spule gespeicherte magnetische Energie Wm ergibt sich aus der
Integration dieser Leistung:
di( t )
i2 = i ( t 2 )
i2 2 i12
di (t )
⋅ dt = di( t )
mit
Wm = ∫ pel (t ) ⋅ dt = ∫ L ⋅
⋅ i( t ) ⋅ dt =
=
L
⋅
i
⋅
di
=
L
⋅
− ;
dt
∫
2
dt
2
t1
t1
i1 = i ( t1 )
und t1 → i1 und t 2 → i2
t2
t2
Für i1=0 und allgemein i2=i gilt:
L⋅i2
;
Wm =
2
magnetische Energie Wm, die im Magnetfeld einer Spule mit
Selbstinduktivität L und Strom i gespeichert ist.
(vgl. Energie, die im E-Feld eines Kondensators mit Kapazität C und Spannung u gespeichert
C ⋅ u2
ist: Wel =
)
2
Für die Energiedichte wm im magnetischen Feld gilt (ohne Ableitung):
wm =
1 r r
⋅H•B
2
r r
Energiedichte wm im magnetischen Feld ( H , B )
-85-
Grundlagen der Elektrotechnik I
Kapitel 6 - Induktion
Veranschaulichung am Beispiel einer Ringspule:
L ⋅i2
Magnetische Energie Wm =
;
2
Spulenvolumen V = r 2 ⋅ π ⋅ 2 ⋅ R ⋅ π ;
Wm L ⋅ i 2
Energiedichte w m =
;
=
2 ⋅V
V
mit L ⋅ i = Ψ = w ⋅ Φ = w ⋅ B ⋅ A = w ⋅ B ⋅ π ⋅ r 2 ;
w ⋅ B ⋅π ⋅ r2 ⋅i
w ⋅i
1
= ⋅ B⋅
gilt: wm =
;
2
2 ⋅π ⋅ r ⋅ 2 ⋅ R ⋅π 2
2 ⋅ R ⋅π
mit
r r
H
∫ • dr = H ⋅ 2 ⋅ R ⋅ π = I eing = w ⋅ i ⇒ H =
ergibt sich:
Allgemein gilt:
w ⋅i
2 ⋅ R ⋅π
1
⋅ B ⋅ H;
2
1 r r
wm = ⋅ B • H
2
wm =
r r
E•D
)
(vgl. Energiedichte im elektrostatischen Feld wel =
2
6.2.4 Erzeugung sinusförmiger Wechselspannungen (Generator, Dynamo)
Eine Spule mit der Fläche A und der Windungszahl w wird mit konstanter
r
2π
im homogenen Magnetfeld B gedreht.
Winkelgeschwindigkeit ω = 2π ⋅ f =
T
-86-
Grundlagen der Elektrotechnik I
Kapitel 6 - Induktion
r r
Von Fläche A umschlossener Fluß Φ = A • B = A ⋅ B ⋅ cosα ( t );
Verketteter Fluß Ψ = w ⋅ A ⋅ B ⋅ cos α ( t );
r
r
Für den Winkel α gilt: α ( t ) = α0 + ω ⋅ t mit dem Winkel α0 zwischen den Vektoren A und B
zum Zeitpunkt t = 0;
Induzierte, zeitabhängige Spannung uab (t ) =
dΨ
d cos α (t )
= w⋅ A⋅ B⋅
;
dt
dt
d cos (ω ⋅ t + α 0 )
= w ⋅ A ⋅ B ⋅ (− sin(ω ⋅ t + α 0 ) ⋅ ω );
dt
Mit − sin α = sin(α ± π ) ergibt sich für die induzierte Spannung uab (t ) :
uab (t ) = w ⋅ A ⋅ B ⋅
ω ⋅ t + α ± π ;
uab (t ) = ω
⋅
w
⋅
A
⋅
B
⋅
sin
14243
1023
U$
ϕu
wobei die Scheitelspannung U$ = ω ⋅ w ⋅ A ⋅ B;
und die Phasenverschiebung ϕu = α0 ± π
definiert werden.
Mit dieser Definition lautet die induzierte Wechselspannung allgemein:
u12 (t ) = u(t ) = U$ ⋅ sin(ω ⋅ t + ϕ u )
-87-