17. Vorlesung Dr.-Ing. Wolfgang Heenes
Werbung

Grundlagen der Informatik III
Wintersemester 2010/2011 – 17. Vorlesung
Dr.-Ing. Wolfgang Heenes
msg:
main:
int main() {
printf("Hello, world!");
return 0;
}
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 1
.data
.asciiz "Hello, world!"
.text
.globl main
la $a0,msg
li $v0,4
syscall
jr $ra
Inhalt
1. Literatur
2. Festplatten
3. Grundbegriffe und Eigenschaften des Magnetismus
4. Induktion
5. Ferritkernspeicher
6. Aufbau magnetischer Festplatten
7. Leistungsdaten
8. SSDs
9. Zusammenfassung und Ausblick
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 2
Literatur
[BO10]
Bryant, Randal E. und David R. O´Hallaron: Computer Systems - A
Programmer´s Perspective.
Prentice Hall, 2010.
[CWHS08] Clausert, Horst, Gunther Wiesemann, Volker Hinrichsen und Jürgen
Stenzel: Grundgebiete der Elektrotechnik I.
Oldenbourg, 2008.
[Hil75]
Hilberg, Wolfgang: Elektronische digitale Speicher.
Oldenbourg, 1975.
[TG06]
Tanenbaum, Andrew S. und James Goodman: Computerarchitektur.
Pearson Studium, 2006.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 3
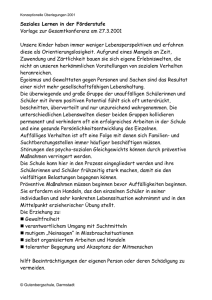
Speicherhierarchie
Festplatten
L0:
Smaller,
faster,
and
costlier
(per byte)
storage
devices
L1:
L2:
Regs
CPU registers hold words retrieved from
cache memory.
L1 cache
(SRAM)
L1 cache holds cache lines retrieved
from the L2 cache.
L2 cache
(SRAM)
L2 cache holds cache lines
retrieved from L3 cache
L3:
L3 cache
(SRAM)
L3 cache holds cache lines
retrieved from memory.
Larger,
slower,
and
cheaper
(per byte)
storage
devices
L4:
L5:
Main memory
(DRAM)
Main memory holds disk
blocks retrieved from local
disks.
Local secondary storage
(local disks)
Local disks hold files
retrieved from disks on
remote network servers.
L6:
Remote secondary storage
(distributed file systems, Web servers)
Abbildung: Quelle: [BO10, S. 48]
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 4
Festplatten
Damals
I
Bereits im Jahr 1878 versuchte der Amerikaner Oberlin Smith elektrische
Daten auf einem magnetischen Draht zu speichern ⇒ kein Patent
I
Ab 1956 verkaufte IBM eine Innovation im Bereich der Speichermedien ⇒
305 RAMAC1
I
Kapazität: ca. 5 Millionen 7-Bit-Zeichen (ca. 5 MB)
I
50 mit Eisenoxid beschichteten Platten
I
1.200 Umdrehungen pro Minute
1
random-access method of accounting and control
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 5
Festplatten
Heute
I
Festplatten sind in unterschiedlichen mechanischen Größen erhältlich
I
I
I
I
I
5,25 “
3,5 “
2,5 “
1,8 “
1,0 “
I
Aus den unterschiedlichen mechanischen Größen ergeben sich
unterschiedliche Speicherkapazitäten
I 3,5 “⇒ 3 TB
I 2,5 “⇒ 1.5 TB
I 1,8 “⇒ 320 GB
I
4.200 bis 15.000 Umdrehungen pro Minute
I
Zunächst Grundbegriffe und Eigenschaften des Magnetismus
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 6
Grundbegriffe und Eigenschaften
des Magnetismus I
I
Bereits im alten Griechenland stellte man fest, dass bestimmte metallische
Körper Kräfte aufeinander ausüben.
I
Diese Tatsache wird als Magnetismus bezeichnet.
I
Magnete besitzen zwei magnetische Pole (Dipol), einen Nordpol und einen
Südpol, welche nicht alleine auftreten können ⇒ Elektrische Ladungen lassen
sich trennen, magnetische Pole nicht [CWHS08, S. 199]
I
Die Ursache von Magnetismus liegt in der Bewegung elektrischer
Ladungsträger.
I
Die um den Atomkern kreisenden Elektronen stellen Kreisströme dar, die
kleinste Felder erzeugen.
I
Desweiteren drehen sich Elektronen um die eigene Achse, was ebenfalls
kleinste magnetische Felder zur Folge hat ⇒ Spin
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 7
Grundbegriffe und Eigenschaften
des Magnetismus II
I
In einem Dauermagneten heben sich diese magnetischen Wirkungen nicht
gegenseitig auf ⇒ ein Magnetfeld ist zu beobachten
I
Wenn man Elektronen in Bewegung bringt, beispielsweise durch Anlegen
einer Spanung an einen Draht, so fließt ein Strom und man bezeichnet das
entstehende Feld als magnetisches Feld.
I
Zur Beschreibung eines Magnetfeldes nutzt man die Formel der
magnetischen Flussdichte B:
µI 1
B1 =
2π%
I
Die Einheit ist
[B] =
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 8
Vs
m2
Grundbegriffe und Eigenschaften
des Magnetismus III
I
Anschauung
Abbildung: Quelle: Magnetischer Fluss [CWHS08, S. 202]
I
I
Die magnetische Flussdichte hängt von dem Stoff ab, der von dem Leiter
umgeben wird.
Materialunabhängige Feldgröße ⇒ magnetische Feldstärke H
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 9
Grundbegriffe und Eigenschaften
des Magnetismus IV
I
Magnetische Feldstärke
H=
I
B
µ
Die Einheit ist
A
m
µ bezeichnet die Permeabilität. Sie beschreibt die Durchlässigkeit eines
Materials für magnetische Felder (vgl. [CWHS08, S. 206])
[H] =
I
I
Die Permeabilität µ = µr · µ0 entspricht im Vakuum genau der
Permeabilitätskonstante µ0 = 4π · 10−7 AN2 (vgl. [CWHS08, S. 206])
I
Unterteilung von Materialien in verschiedene Kategorien bzgl. der
Permeabilität µr .
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 10
Grundbegriffe und Eigenschaften
des Magnetismus V
I
Kategorien der Permeabilität µr
I
paramagnetische Stoffe (µr ' 1): teilweise Ausrichtung der magnetischen
Momente unter Anlegen eines äußeren Magnetfeldes. Nur schwache
Verstärkung des äußeren Magnetfeldes. Liegt kein Magnetfeld an, ist die
Restwirkung nach außen nur sehr schwach.
I
diamagnetische Stoffe (µr / 1): während des Anlegens eines äußeren
Magnetfeldes bilden sich antiparallele Dipole aus, welche das äußere Feld
abschwächen.
I
ferromagnetische Stoffe (µr 1): durch Wechselwirkung benachbarter
Dipole entsteht eine starke Ausrichtung sehr vieler Dipole bereits beim
Anlegen schwacher Felder, teilweiser Erhalt der Felder nach Abschalten des
äußeren Feldes.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 11
Grundbegriffe und Eigenschaften
des Magnetismus VI
I
Diamagnetismus tritt bei allen Materialien auf, wird aber häufig durch die
paramagnetischen und ferromagnetischen Eigenschaften der Stoffe
überdeckt.
I
Bringt man einen Stoff in ein starkes Magnetfeld, etwa das einer Strom
durchflossenen Spule, so werden die (induzierten oder permanenten)
magnetischen Dipole im Inneren des Materials ausgerichtet ⇒ das Material
wird magnetisiert.
I
Bei ferromagnetischen Stoffen bleibt diese Magnetisierung teilweise nach
Abschalten des äußeren Feldes bestehen, was als Grundlage zur
Speicherung von Informationen bei Festplatten und anderen
Magnetspeichersystemen dient.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 12
Grundbegriffe und Eigenschaften
des Magnetismus VII
I
Ferromagnetimus: Typische ferromagnetische Stoffe sind reines Eisen,
Cobalt, Nickel und Legierungen dieser Metalle untereinander.
I
Die relative Permeabilitätszahl dieser Stoffe beträgt zwischen µr = 104 ...106 .
I
Schon sehr schwache äußere Magnetfelder führen bei diesen Stoffen zu einer
Anordnung vieler Dipole, welche nach Abschalten des äußeren Feldes
bestehen bleiben.
I
Die Wechselwirkung der Dipole untereinander ist so stark, dass sich
mikroskopisch kleine Raumbereiche durch diese Beeinflussung ausrichten.
Diese Bereiche nennt man auch Weiß’ sche Bezirke.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 13
Grundbegriffe und Eigenschaften
des Magnetismus VIII
I
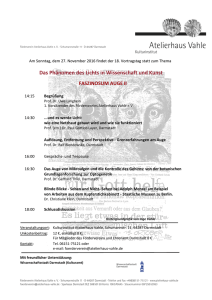
Hysterese Kurve
Abbildung: Quelle: Hysterese Kurve [CWHS08, S. 207]
I
Flussdichte eines Materials als Funktion eines äußeren Magnetfeldes
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 14
Grundbegriffe und Eigenschaften
des Magnetismus IX
I
In der Abbildung wird die magnetische Flussdichte B eines Materials als
Funktion eines äußeren Magnetfeldes H dargestellt.
I
Während das äußere Feld vom Nullpunkt ausgehend allmählich ansteigt,
nimmt B entlang der vom Nullpunkt nach P1 führenden Kurve zu.
I
Die Abflachung der Kurve in der Nähe von P1 zeigt, dass die Weiß’schen
Bezirke größtenteils ausgerichtet sind und das Material gesättigt ist.
I
Oberhalb der Sättigung nimmt B nur noch zu, weil das äußere Magnetfeld
zunimmt.
I
Fällt das äußere Feld aus, so bleibt die Anordnung der Bezirke teilweise
erhalten und B sinkt von P1 auf Br zurück.
I
Der Fluss ist im Punkt Br allerdings nicht 0.
I
Das zurückbleibende Magnetfeld nennt man Remanenzfeld.
I
An diesem Punkt ist das Material zum Dauermagnet geworden.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 15
Grundbegriffe und Eigenschaften
des Magnetismus X
I
Polt man die Spule nun um, so dass das äußere Magnetfeld H in
entgegengesetzte Richtung zeigt, nimmt der Fluss allmählich ab. Er erreicht
im Punkt Hc wieder 0.
I
Dieser Punkt wird als Koerzitivfeldstärke bezeichnet.
I
Eine Neutralisierung eines einmal magnetisierten ferromagnetischen
Materials ist also nur möglich, wenn man ein entgegengesetztes äußeres Feld
in Größe der Koerzitivfeldstärke anlegt.
I
Erhöht man den Strom weiter, erreicht man den Punkt P2 , über welchen
hinaus wieder Sättigung auftritt.
I
Nach Abschalten des äußeren Magnetfeldes fällt der Fluss dann auf den
Punkt −Br zurück, welcher wiederrum nur durch Anlegen eines Magnetfeldes
der Stärke Hc neutralisiert werden kann.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 16
Grundbegriffe und Eigenschaften
des Magnetismus XI
I
Im Gegensatz zu analogen Aufzeichnungsverfahren wird im digitalen
Verfahren das Material stets bis in die Sättigung getrieben.
I
Die Punkte +Br und −Br bilden nun die Punkte, die zum Speichern der Daten
genutzt werden.
I
Oberhalb einer bestimmten Temperatur (Curie-Temperatur) werden die
ferromagnetischen Effekte aufgehoben werden. Bei Nickel beträgt diese
beispielsweise 358◦ .
I
Theorie ⇒ Schreiben von Informationen (stationäre Magnetfelder)
I
Wie werden Daten wieder ausgelesen? (zeitlich veränderliche Magnetfelder)
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 17
Grundbegriffe und Eigenschaften
Induktion I
I
Beim Leseprozess von Festplatten kommen keine stationären sondern zeitlich
veränderliche Magnetfelder zum Einsatz.
I
Veränderliche Magnetfelder entstehen durch veränderliche Ströme oder
Bewegung von Magneten.
I
Wie Faraday bereits im 19. Jahrhundert feststellte, erzeugen Magnete einen
Strom, wenn man sie über eine geschlossene, unbewegte Leiterschleife
bewegt.
I
Diese Eigenschaft wird bei Festplatten zum Auslesen der Informationen
genutzt.
I
Eine umfassende Darstellung findet sich in [CWHS08, S. 213]
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 18
Grundbegriffe und Eigenschaften
Induktion II
I
Der magnetische Fluss Φ bezeichnet den Fluss pro Fläche A und berechnet
sich als Flächenintegral über der Flussdichte B. Anschaulich gesprochen stellt
Φ die Anzahl der Feldlinien in einer Fläche da.
~ =
Φ
Z
~ Ã
Bd
[ Φ] =
Vs 2
m = Vs = 1Wb
m2
A
I
Bei Experimenten stelle man fest, dass jede Änderung des Flusses durch die
von einer Leiterschleife umschlossene Fläche eine Spannung in der Schleife
induziert, deren Stärke sich proportional zur Änderungsrate des Flusses
verhält ⇒ Induktionswirkung
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 19
Grundbegriffe und Eigenschaften
Induktion III
I
Induktionsgesetz in seiner einfachsten Form lautet (vgl. [CWHS08, S. 226]):
Uind = −
I
dΦ
dt
[U] =
Vs
=V
s
Sind mehrere Leiterschleifen hintereinander geschaltet und vom gleichen
Fluss durchsetzt, beispielsweise eine Spule mit N-Windungen, so verstärkt
sich die induzierte Spannung gerade um N ([CWHS08, S. 228])
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 20
Ferritkernspeicher
I
Speicher wurden früher auf unterschiedliche Arten realisiert
I
I
Relais
Röhren
I
Außerdem ⇒ Ferritkernspeicher
I
Anwendung als Hauptspeicher
I
Weiterführende Informationen in [Hil75, S. 70]
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 21
Aufbau magnetischer Festplatten I
I
I
Eine Festplatte besteht grundlegend aus vier Komponenten
Komponenten:
I
I
I
I
I
Aufzeichnende Oberfläche (Recording Surface)
Lese-/Schreibkopf (Read/Write Heads)
Stellmotor (Transport mechanism)
Controller (Control electronics)
Im Folgenden werden Stellmotoren und Controller nicht weiter behandelt.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 22
Aufbau magnetischer Festplatten II
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 23
Aufbau magnetischer Festplatten III
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 24
Aufbau magnetischer Festplatten IV
Oberfläche
I
Als aufzeichnende Oberfläche werden in Festplatten typischerweise
mehrere Aluminiumscheiben mit einem Durchmesser von 3 bis 12 cm
verwendet.
I
Diese wird als nicht-magnetisches Basismaterial genutzt, auf welches eine
dünne metallische Schicht mit hohem µr aufgebracht ist.
I
Die Scheibe wird während des Betriebes in Drehung versetzt um die Daten
über den gesamten Umfang zu speichern.
I
Knapp darüber schwebt der Lese-/Schreibkopf auf einem Luftkissen.
I
Dieser detektiert die unter ihm drehenden positiven oder negativen
magnetischen Felder.
I
Durch den induzierten Strom (bei Veränderung des Magnetfeldes) werden die
Daten ausgelesen und an den Controller weitergeleitet, dekodiert und
ausgegeben.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 25
Aufbau magnetischer Festplatten V
Organisation
I
Die kreisförmig angeordneten Sequenzen von Magnetfeldern nennt man Spur
(Track).
I
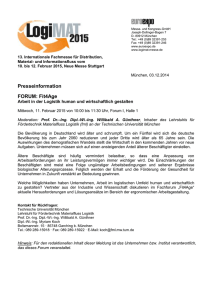
Jede Spur ist in eine Anzahl von Sektoren fester Länge unterteilt. Ein Sektor
hat z. B. 512 Byte.
I
Hinzu kommen pro Sektor die Präambel, ein Teil vor den eigentlichen Daten,
welcher zur Synchronisation dient, sowie ein Fehlerkorrekturcode am Ende.
I
Zwischen zwei Sektoren befindet sich eine kleine Lücke, die
Zwischensektor-Lücke.
I
Die Verwaltungsdaten betragen etwa 15% der gesamten Sektordaten. [TG06,
S. 100]
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 26
Aufbau magnetischer Festplatten VI
Organisation
Abbildung: Quelle: [TG06, S. 100]
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 27
Aufbau magnetischer Festplatten VII
Organisation
I
Ursprünglich war jede Spur in eine gleiche feste Anzahl von Sektoren
unterteilt.
I
Durch die konstante Winkelgeschwindigkeit der Scheiben entstanden bei den
unterschiedlichen Umfängen der Spuren allerdings mehrere Probleme.
I
Zum einen veränderte sich die Kreisgeschwindigkeit und zum anderen
wurden die weiter außen liegenden Sektoren gestreckt.
I
In den Anfängen setzte man am Innenradius der Festplatte die größtmögliche
Speicherdichte an und streckte die äußeren Sektoren.
I
So konnte man trotz unterschiedlichen Kreisgeschwindigkeiten mit der
gleichen Technik lesen.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 28
Aufbau magnetischer Festplatten VIII
Organisation
I
Heute wird die Scheibe von innen nach außen in Zonen unterteilt.
I
Jede Zone enthält mehrere Spuren sowie eine unterschiedliche Zahl von
Sektoren.
I
Auf den inneren Zonen liegen weniger Sektoren, auf den äußeren
entsprechend mehr.
I
Die Länge eines Sektors bleibt dadurch weitgehend gleich.
I
Verbunden mit einem erhöhten Steuerungsaufwand kann so mehr
Speicherplatz genutzt werden. [TG06, S. 102]
I
In modernen Festplatten liegen zwischen 5.000 und 10.000 Spuren parallel
pro cm Radius, was eine effektive Spurbreite von 1 bis 2 µm oder 50.000 bis
100.000 Bit/cm ergibt.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 29
Aufbau magnetischer Festplatten IX
Organisation
I
Beim Platzieren der Bits auf den Spuren unterscheidet man zwischen zwei
Techniken:
I
I
Longitudinal Recording: Die Dipole werden waagerecht in die magnetisierbare
Schicht eingebracht.
Perpendicular Recording (PMR): Die Dipole werden senkrecht in die
magnetisierbare Schicht eingebracht.
I
Von der Dekodierung her unterscheiden sich die beiden Verfahren nicht.
I
Aufgrund der Platzersparnis der senkrechten Positionierung wird bei neuen
Festplatten aber Perpendicular Recording verwendet. [TG06, S. 101]
I
Aufgrund der besseren Darstellbarkeit wird im weiteren Verlauf allerdings
Longitudal Recording betrachtet.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 30
Aufbau magnetischer Festplatten X
Lese-/Schreibkopf
I
Grundlegend unterscheidet man zwischen zwei Arten von Leseköpfen
I
I
Induktive Köpfe
Magneto-Resistive (MR) Köpfe
I
Ein induktiver Lesekopf besteht aus einer Spule - einem Ring mit vielen
dünnen Drahtschleifen. Die induzierte Spannung dabei Uind = −N ddtΦ .
I
Ein MR-Lesekopf nutzt den magnetoresitiven Effekt aus, welcher die
Änderung eines elektrischen Widerstandes eines Materials bei Anlegen eines
äußeren Magnetfeldes bezeichnet.
I
Durch diesen Effekt lassen sich höhere Spannungsamplituden als mit
induktiven Köpfen erzeugen.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 31
Aufbau magnetischer Festplatten XI
Lese-/Schreibkopf
I
Zum Schreiben von Daten wird ein induktiver Kopf genutzt. Als Lesekopf wird
meistens ein MR-Kopf verwendet. Wird auch der Lesekopf induktiv realisiert,
so können beide Köpfe durch eine einzige Spule realisiert werden.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 32
Aufbau magnetischer Festplatten XII
Aufzeichnung der Daten
I
Die zu schreibenden Informationen werden durch einen Strom abgebildet,
welcher die Spule des Schreibkopfs antreibt.
I
Das durch den Stromfluss erzeugte magnetische Feld ändert den Zustand
des magnetisierbaren Materials unter dem Kopf.
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 33
Leistungsdaten I
I
I
Die Leistungsfähigkeit der Festplatte hängt von vielen Faktoren ab
Die Zugriffszeit auf einen Sektor hängt im Wesentlichen von drei Größen ab
I
I
I
Such-Zeit (Seek Time)
Rotations-Latenz (Rotational Latency)
Übertragungs-Zeit (Transfer Time)
I
Such-Zeit: Zeit um den Arm zum entsprechenden Ziel-Sektor zu bewegen.
I
Rotations-Latenz: ggf. bis zu einer Umdrehung
I
Übertragungs-Zeit: Zeit, um einen Sektor zu lesen ⇒ hängt ab von
Rotationsgeschwindigkeit
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 34
Leistungsdaten II
I
Beispiel:
I
I
I
I
Drehzahl: 7200 Umdrehungen in der Minute (U/min)
Tavgseek = 9 ms
Anzahl der Sektoren pro Spur (durchschnittlich): 400
Rotations-Latenz:
Tavgrotation =
I
Übertragungs-Zeit:
Tavgtransfer =
I
1
60 s
1000 ms
1
· Tmaxrotation = ·
·
≈ 4 ms
2
2 7200 U /min
s
1
1000 ms
60 s
·
·
≈ 0.02 ms
7200 U /min 400 sectors/track
s
Zugriffszeit:
Taccess = Tavgseek + Tavgrotation + Tavgtransfer ≈ 13.02 ms
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 35
Leistungsdaten III
I
Beispiel: www.seagate.com
I
I
I
I
I
I
I
I
I
Platten: 4
Oberflächen: 8
Oberflächen-Durchmesser: 3.5 in.
Sektor Größe: 512 Byte
Zonen: 15
Zylinder: 50.864
...
Formatierte Kapazität: 146.8 GB
Leistungsdaten im Einsatz
I
I
I
I
Umdrehungszahl: 15.000 Umdrehungen pro Minute
Rotations-Latenz (durchschnittlich): 2 ms
Such-Zeit (durchschnittlich): 4 ms
Übertragungsrate: 58 - 96 MB/s
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 36
SSDs
Einleitung
I
SSD steht für Solid State Disk
I
Zur Erinnerung: Es gibt unterschiedliche Arten von Speichern
I
Unterscheidung neben Register, SRAM, DRAM auch durch die Permanenz
I
Festplatte ist ein permanenter Speicher ⇒ Nachteil im Vergleich zu SRAM
und DRAM ist die Geschwindigkeit
I
Vorteil ist, dass Daten permanent gespeichert werden können
I
Einführung eines weiteren Speichers in der Hierarchie
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 37
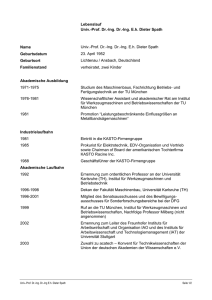
Speicherhierarchie
SSDs
Abbildung: Quelle: http://www.bit-tech.net/hardware/memory/
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 38
SSDs
Entwicklungen
I
Read Only Memory (ROM), Werte bei Herstellung festgelegt
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 39
SSDs
Entwicklungen
I
Programmable Read Only Memory (PROM), einmalig durch Anwender
programmierbar
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 40
SSDs
Entwicklungen
I
Erasable Programmable Read Only Memory (EPROM)
I
I
I
I
Festwertspeicher
elektrisch programmierbar (durch Überspannungen, ca. 25 V)
durch UV-Bestrahlung löschbar
Electrically Erasable Programmable Read Only Memory (EEPROM)
I
I
I
Festwertspeicher
elektrisch programmierbar
elektrisch löschbar
I
Flash-Speicher
I
Zugrundeliegende Technologie ⇒ Feldeffekttransistoren
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 41
SSDs
Entwicklungen
I
Flash-Zelle, mit Floating Gate
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 42
SSDs
Leistungsdaten
I
Lesen einer SSD [BO10, S. 616]
I
I
I
I
Sequentieller Lese-Durchsatz: 250 MB/s
Zufälliger Lese-Durchsatz: 140 MB/s
Zugriffszeit (zufällig): 30 µs
Schreiben einer SSD [BO10, S. 616]
I
I
I
Sequentieller Schreib-Durchsatz: 170 MB/s
Zufälliger Schreib-Durchsatz: 14 MB/s
Zugriffszeit (zufällig): 300 µs
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 43
Zusammenfassung und Ausblick
I
Festplatten
I
SSDs
Nächste Vorlesung behandelt
I
Kodierungen
14. Dezember 2010 | Technische Universität Darmstadt | Dr.-Ing. Wolfgang Heenes | 44