2 Bauelemente auf der Basis von Halbleiter
Werbung

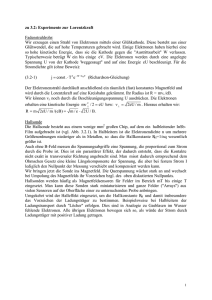
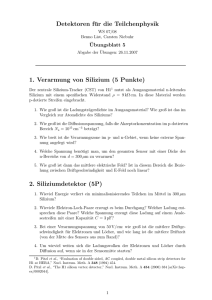
Der piezoresistive Drucksensor 2 2-1 Bauelemente auf der Basis von Halbleiterwiderständen a) Dehnungsverhalten Kraftsensoren, Drucksensoren, Beschleunigungssensoren b) Temperaturverhalten Temperatursensoren c) Lorentzkraft Magnetfeldsensoren 2.1 Der piezoresistive Drucksensor Bisher haben wir nur eindimensionale W(k)-Diagramme betrachtet. Um der dreidimensionalen Struktur eines Kristalls gerecht zu werden, gibt es zwei Möglichkeiten: 1. Es werden verschiedene Schnitte durch den Kristall gelegt und hier jeweils ein eindimensionales W(k)-Diagramm gezeichnet. r 2. Es wird ein dreidimensionales W( k )-Diagramm konstruiert. Statt Linien konstanter Energie werden nun Flächen konstanter Energie dargestellt. Die folgende Abbildung zeigt ein eindimensionales W(k)-Diagramm von Silizium, auf der positiven x-Achse vom Mittelpunkt entlang der [100]Richtung(=x-Richtung des Kristalls), auf der negativen x-Achse entlang der [111]-Richtung(=Raumdiagonale des Kristalls): 2-2 Bauelemente auf der Basis von Halbleiterwiderständen r Die nächste Abbildung zeigt für Silizium ein 3D - W( k )-Diagramm: Wir beschränken uns im folgenden auf n-Silizium. Die Aufenthaltswahrscheinlichkeit der Elektronen ist am größten in den Leitungsbandminima. Ähnlich wie in der eindimensionalen Darstellung die W(k)-Kurve in einer kleinen Umgebung des Minimums einer Parabel gleicht, liegen im 3dimensionalen Diagramm die Werte gleicher Energie in der Umgebung der Minima auf einem Ellipsoid. Entlang der Achsen ist die longitudinale effektive Masse der Elektronen größer (kleine Krümmung!) als die transversale effektive Masse (starke Krümmung!). Das Verhältnis der Beweglichkeiten µl und µt ist daher genau umgekehrt: µt = 5. µl Im unbelasteten Zustand (d.h. ohne äußere Druckeinwirkung) verteilen sich die Elektronen gleichmäßig auf alle sechs Bereiche minimaler Energie. Der spezifische Widerstand ρ0 ist isotrop. Um ihn zu berechnen, nehmen wir ein elektrisches Feld in y-Richtung an. Die Elektronen üben dann eine Driftbewegung entgegen der Richtung der Feldstärke aus. Dabei bewegen sich doppelt so viele Elektronen in Richtung der schmalen Achse der Flächen konstanter Energie (transversale Bewe- Der piezoresistive Drucksensor 2-3 gung: nx und nz) als in Richtung der langen Achse der Flächen konstanter Energie (longitudinale Bewegung: ny). Daraus folgt: ρ0 = 1 e (2n yµl + 2n xµ t + 2n zµ t ) 6 = 1 en (2µ l + 4µ t ) 6 . Wirkt nun auf den Kristall eine (Zug-)Kraft in Richtung der elektrischen Feldstärke, im betrachteten Fall also in y-Richtung, so entfernen sich Atome, die in dieser Richtung liegen. Auf Grund der Bindungskräfte nähern sich Atome, die in den anderen beiden Richtungen liegen. Dies führt zu einer Zunahme des Bandabstandes in der y-Richtung (positives ∆Wy) und zu einer Abnahme des Bandabstandes in der x- und zRichtung (negatives ∆Wx, ∆Wz). Siehe nachfolgende Abbildung, die gestrichelten Linien gelten für den Belastungszustand. Wegen ny ∝ e − Wc + ∆Wy − WF kT nx = nz ∝ e und − Wc + ∆Wx − WF kT verringert sich ny, während nx = nz wachsen. Der Widerstand anisotrop. ρ= 1 e (2n yµl + 4n xµ t ) 6 ist also unter Belastung 2-4 Bauelemente auf der Basis von Halbleiterwiderständen Wirkt die mechanische (Zug-)Spannung in Richtung des elektrischen Feldes (und in Richtung einer Hauptachse) wirkt, sinkt der Widerstand (longitudinale Belastung). Stehen mechanische (Zug-)Spannung (in Richtung einer Hauptachse) und elektrisches Feld aufeinander senkrecht, steigt der Widerstand (transversale Belastung). Dieser piezoresistive Effekt wird in Druck- und Beschleunigungssensoren angewendet. Silizium zeigt eine hohe Empfindlichkeit und kann auf Grund der entwickelten Ätztechniken am besten strukturiert werden. Man definiert den sogenannten K-Faktor durch ∆R =K ε R ∆R ist die relative Widerstandsänderung, ε die relative LängenändeR rung. Mit Silizium erreicht man K-Faktoren zwischen -120 und +120, bei Metallen liegt der Faktor lediglich zwischen 0 und +2! Magnetfeldsensoren 2-5 6GORGTCVWTCDJ¼PIKIG9KFGTUV¼PFGCWU OQPQMTKUVCNNKPGO5KNK\KWO Betrachtet man das letzte Diagramm in Abschnitt 1.6.2, so erweist sich der Bereich zwischen -50°C und 200°C als sinnvoller Arbeitsbereich. Als Temperaturkoeffizienten α bezeichnet man die Größe α = α(T ) = dR(T ) / dT . R(T ) Für relativ niedrige Dotierungen (unter 1015cm-3) ergibt sich ein Temperaturkoeffizient von α(25°C) = 0,008 K-1 ≈ konst d.h. ≠ f (T ) Ein einfachster Sensor ist im folgenden Bild skizziert. Ein wesentlicher Nachteil ist die Tatsache, daß die elektrischen Werte durch Geometriefaktoren bestimmt werden, die nur durch relativ ungenaues Sägen definiert werden. Daher benutzt man häufig sog. „Spreading - Resistance“ - Sensoren. Hier erfolgt die Stromeinspeisung durch ein sehr kleines, photolithographisch genau reproduzierbares Kontaktfenster (≈20 µm ∅). Die Stromlinien spreizen sich dann und enden senkrecht auf der Rückseitenmetallisierung. 2-6 Bauelemente auf der Basis von Halbleiterwiderständen n ≅ 1015 cm−3 Es gilt: R= ρ πd für t >> d 2 (Bezeichnungen siehe Bild). Die Streuung der Kristalldicke t geht also nicht ein. Für typische Werte ρ25°C = 6,5 Ωcm, d = 20 µm, t = 250 µm R25°C≈1 KΩ. ergibt sich ( R = R 25 1 + α(T[°C] − 25°C ) + β(T[°C] − 25°C ) α ≈ 7,8.10 −3 2 1 k β = 1,48.10 −5 1 k2 ) Magnetfeldsensoren 2-7 /CIPGVHGNFUGPUQTGP Grundlage für Magnetfeldsensoren ist der Halleffekt, welcher wiederum eine Folge der Lorentzkraft darstellt: r Bewegt sich ein Teilchen mit derr Ladung q und der Geschwindigkeit v in einem Magnetfeld der Stärke B , so erfährt es eine Kraft der Größe r r r F = qv × B . Der resultierende Hall-Effekt ist in der nächsten Abbildung schematisch dargestellt. Auf die Ladungsträger wirkt eine Kraft, die sowohl senkrecht zur Stromrichtung als auch zum Magnetfeld steht. Durch die Ladungstrennung wird ein elektrisches Feld EH aufgebaut, welches im stationären Zustand die Lorentzkraft ausgleicht. Dem elektrischen Feld entspricht eine Hallspannung der Größe UH = EHW. r r v F = qv × B r B r F(q = −e ) z r v y x r F(q = +e ) UH EH B EH I E W Im allgemeinen wird ein Strom sowohl durch Elektronen als auch durch Löcher getragen, wobei allerdings meist eine Komponente stark überwiegt. 2-8 Bauelemente auf der Basis von Halbleiterwiderständen Da die Hallspannung für beide Ladungsträger entgegengesetzt gerichtet ist, kann man durch ihre Polarität die Natur der überwiegenden Ladungsträger ermitteln. Mit den Bezeichnungen der Abbildung gilt für Elektronen: v x = −µnE x Fy = ev xBz Fy = −eµnE xBz = −eE y E y = µnE xBz Damit ergibt sich die Hallspannung für die Elektronen zu UH = −µnE xBz W und für die Löcher UH = +µpE xB z W Der Halleffekt gestattet also die Messung der Beweglichkeit.