Page 1 Physik PHB3/4 (Schwingungen, Wellen, Optik
Werbung

Physik PHB3/4 (Schwingungen, Wellen, Optik)
09_Schwingungen_Einführung_BA_W2000.doc - 1/4
II SCHWINGUNGEN
1 Einführung
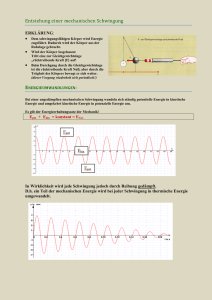
Handversuch: Federpendel auslenken und loslassen.
(Dynamische) Charakterisierung des Federpendels:
stabile Ruhelage
rücktreibende Kraft bei Auslenkung aus der Ruhelage
Trägheit der Masse führt bei der Rückkehr in die Ruhelage zu
einem Überschwingen.
D
(Energetische) Charakterisierung des Federpendels
m
Im schwingenden Zustand wiederholen sich die Bewegungszustände.
Bei der maximalen Auslenkung besitzt das Pendel nur die pot. Energie der
Federspannung. Beim Nulldurchgang besitzt das Pendel nur die kin. Energie
der bewegten Masse.
Damit haben wir die kennzeichnenden Eigenschaften eines
schwingungsfähigen Systems gefunden.
Definition: Schwingungsfähiges System
Jeder bewegliche "Körper" (Masse, Ladung, ... ), der durch
rücktreibende Kräfte an eine stabile Gleichgewichtslage
gebunden ist, stellt ein schwingungsfähiges System dar.
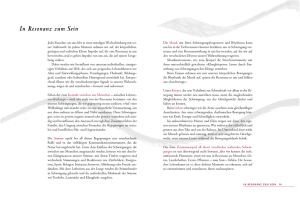
Eine Schwingung ist eine periodische Zustandsänderung, bei der Energie zwischen zwei
Energiereservoiren ausgetauscht wird.
(hier: potentielle Energie der Feder kinetische Energie der Masse)
Periodische Zustandsänderung
(Energieaustausch)
Ein schwingungsfähiges
Element (Oszillator)
Viele gekoppelte schwingungsfähige
Elemente
Schwingung
Welle
D
D
K
m
m
Kennzeichen: Energie der Schwingung
breitet sich entlang der Federkette aus.
Physik PHB3/4 (Schwingungen, Wellen, Optik)
09_Schwingungen_Einführung_BA_W2000.doc - 2/4
2 Systeme mit 1 Freiheitsgrad
2.1 Definitionen und Begriffe
a) Freiheitsgrad
Zahl der notwendigen Koordinaten zur vollständigen Beschreibung des
Bewegungsablaufs eines Systems.
Beispiel: Massenpunkt 3 Translationsfreiheitsgrade f = 3;
Starrer Körper 3 Translations- plus 3 Rotationsfreiheitsgrade f = 6
b) Periodische Bewegung
Nach einem Zeitintervall T (Periodendauer) wiederholt sich ein bestimmter Bewegungszustand
in gleicher (ungedämpfte Schwingung) oder ähnlicher (gedämpfte Schwingung) Form.
Beispiel für eine periodische Bewegung
(t): physikalische Größe
(t)
T
(Auslenkung, Ladung, Spannung etc. )
(t ) (t T ) (t 2T ) ...
t
T:
Periodendauer
Wichtigster Spezialfall einer periodischen Bewegung:
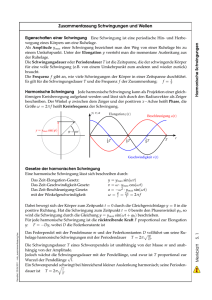
Harmonische Schwingung - der Schwingungsvorgang läßt sich mit einer einfachen Sinus- bzw.
Kosinusfunktion beschreiben. (Wir werden sehen, dass sich eine harmonische Schwingung immer
dann ergibt, wenn die rücktreibende Kraft einem linearen Kraftgesetz gehorcht).
c) Kinematik der harmonischen Schwingung (Wiederholung)
Nach obiger Definition ist eine Kreisbewegung mit der Winkelgeschwindigkeit = 2/T = const
eine periodische Bewegung mit der Periode T ( zirkulare Schwingung).
Eine lineare Schwingung, d.h. eine Bewegung auf einer geraden Bahn ergibt sich durch Projektion auf
die x- oder y-Achse.
y
y
r
r
0
x
r
x
T/2
Projektion auf y-Achse:
y ( ) r sin
y (t ) r sin t
Projektion auf x-Achse:
x( ) r cos
x(t ) r cos t
T
t
Physik PHB3/4 (Schwingungen, Wellen, Optik)
09_Schwingungen_Einführung_BA_W2000.doc - 3/4
Weg- Zeitgesetz der harmonischen Schwingung
s (t ) sˆ sin t
mit:
s = Amplitude
t = = Phase (entspricht dem Dreh winkel,
bzw. dem Bogen auf dem Einheitskreis)
= Kreisfrequenz, [] = rad/s
f = Frequenz
t = Zeit
2
Wegen:
2f
äquivalente Schreibweise
T
2
s(t ) s sin( t ) s sin(2ft )
T
s(t)
s
t
0
T/2
T
v(t)
Geschwindigkeit
ds
dt
v (t ) s cos t
v (t )
mit
vmax s v
t
0
T/2
T
a(t)
Beschleunigung
dv d 2 s
dt dt 2
a (t ) s 2 sin t 2 s(t )
a (t )
mit
t
amax s 2 a
T/2
T
s(t)
Allgemeine Form einer harm. Schwingung
s(t ) s sin(t 0 )
0 = Phase für t = 0
(Nullphasenwinkel)
t
Physik PHB3/4 (Schwingungen, Wellen, Optik)
09_Schwingungen_Einführung_BA_W2000.doc - 4/4
d) Darstellung von Schwingungsvorgängen mit komplexen Zahlen
Darstellung mit kreisenden Zeigern oder Phasoren in der komplexen Ebene
Vorteil: Einfache Mathematik, kein umständliches Rechnen mit trigonometrischen
Umformungen, anschauliche Darstellung bei Überlagerung von Schwingungen.
(t ) sei eine beliebige komplexe Zahl1
exp{ j (t )}
(t )
0
Im
ˆ e j 0 exp{ jt}
(t )
ˆ e j 0
C
(t)
t
Interpretation:
(t ) geht aus C durch Drehung um den Winkel
C
Re
t hervor. (t ) beschreibt eine Bewegung auf
und der
dem Kreis mit dem Radius
Winkelgeschwindigkeit .
Zusammenhang mit reeller Schwingung
exp{ j (t )}
(t )
0
komplexe Darstellung
Re{exp j (t )}
(t )
0
Projektion auf reelle Achse
______________________________________________________
cos(t )
(t )
0
reelle Kosinusschwingung
exp{ j (t )}
(t )
0
komplexe Darstellung
Im{exp j (t )}
(t )
0
Projektion auf imaginäre Achse
______________________________________________________
sin(t )
(t )
0
reelle Sinusschwingung
Projektion von (t ) auf die reelle Achse
Kosinusschwingung
Projektion von (t ) auf die imaginäre Achse Sinusschwingung
e) Darstellung mit Eulerformel
Nach Euler gilt:
e jt cos t j sin t
2 cos t e jt e jt
2 j sin t e jt e jt
1
Diese Darstellung (unterstrichen) verwendet man in der Elektrotechnik zur Kennzeichnung einer komplexen Größe.