Skript - AcroTeX
Werbung

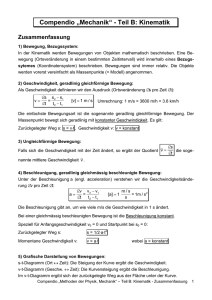
Inhaltsverzeichnis I Mechanik 3 1 Kinematik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.1 Einleitung und Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.2 Eindimensionale Bewegung . . . . . . . . . . . . . . . . . . . . . . . . . . 8 1.3 Kinematische Diagramme . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 1.4 Bewegungen in der Ebene – zweidimensionale Kinematik . . . . . . . . . 20 1.5 Bewegungen in drei Raumrichtungen – Vektoren . . . . . . . . . . . . . . 22 1.6 Bewegungen auf einer Kreisbahn . . . . . . . . . . . . . . . . . . . . . . . 24 3 I Mechanik 1 Kinematik Lernziele • Bewegung von materiellen Teilchen/Körpern in Worten beschreiben sowie in mathematischer Notation und in Graphen. • Darstellung in Graphen/Diagrammen unter Berücksichtigung der SI-Einheiten. • Basisgrößen Zeit, Länge und Masse des SI-Systems kennen und auf abgeleitete Einheiten anwenden können. • CODATA-Werte von physikalischen Größen mit Präzisionswerten und Fehlergrenzen interpretieren können und mit sinnvollen Ziffern in Übungsaufgaben rechnen • Die mathematischen Operationen Differenzieren und Integrieren als Tangentenproblem und Flächenbestimmung interpretieren und auf einfache Kurven und ihre mathematische Beschreibung anwenden können. • Für eindimensionale Bewegungen die Größen Weg, Geschwindigkeit und Beschleunigung erklären und ihre Verknüpfungen angeben können. 1.1 Einleitung und Übersicht In dieser Einführung werden teilweise bereits Begriffe benutzt, die zu Modellvorstellungen und Denkkonzepten gehören, die im Mechanik-Grundkurs erst später eingeführt werden. Dies soll bewusst die Zielvorstellungen des Mechanik-Kurses mit einbeziehen und die Notwendigkeit zeigen, grundlegende Definitionen sauber einzuführen, um darauf das Gedankengebäude der Newtonschen Mechanik aufzubauen. Die Kinematik beschreibt die Bewegung von Körpern, ohne nach der physikalischen Ursache zu fragen, die diese Bewegung hervorruft oder veranlasst. Die Beschreibung physikalischer Sachverhalte kann erfolgen (1) in verbal sprachlicher Formulierung (in der Umgangssprache und in der Fachsprache), (2) als graphische Darstellung in Diagrammen, (3) in mathematisch analytischer Beschreibung oder (4) als Interpretation durch eine Computersimulation. Zum Einüben von Problemlöseverhalten sind diese Denkweisen – die Lernforschung spricht von multiplen Repräsentationen – nützlich und wichtig. Die Dynamik – basierend auf den Newtonschen Gesetzen – beschreibt die Physik der Bewegungen, hervorgerufen von Kräften oder Drehmomenten, die auf einen Körper wirken und damit eine Änderung seines Bewegungszustandes bewirken. Kinematik 4 Am einfachsten ist die Beschreibung der Bewegung eines materiellen Teilchens (oft auch als Punktmasse bezeichnet). Die räumliche Ausdehnung eines materiellen Teilchens ist (verschwindend) klein gegen alle anderen Abstände die eingehen. Ein materielles Teilchen hat die Eigenschaft Masse, d. h., es unterliegt den Newtonschen Gesetzen der Dynamik. Weil ein materielles Teilchen keine räumliche Ausdehnung hat, müssen Rotationen vereinfachend nicht berücksichtigt werden. In Erweiterung geht man zunächst zu einem System aus N materiellen Teilchen (individuelle Massenelemente Δmi ) über und fordert: Der gegenseitige Abstand der N Teilchen ändert sich nicht, d. h., eine Verformung durch äußere Kräfte soll ausgeschlossen sein. Geht man zu einer kontinuierlichen Massenverteilung über, so erhält man das Modell eines starren Körpers. Zur kinematischen Beschreibung von Bewegungen benutzt man als Bezugssysteme geeignete Koordinaten. Bewegungen können in drei Raumrichtungen erfolgen, demzufolge spricht man von Bewegungsformen im ein-, zwei- und dreidimensionalen Raum. Koordinatensysteme passt man dabei zweckmäßig auf ein vorliegendes Problem an. Es gibt: • Kartesische Koordinaten (ein-, zwei-, dreidimensional) y P (x/y) x • Polarkoordinaten (zweidimensional) Bei der Verwendung von Polarkoordinaten wird jeder Punkt einer Ebene durch seinen Abstand von einem Nullpunkt und durch einen Winkel gegen eine vordefinierte Nullrichtung definiert. Für den Zusammenhang zwischen Polarkoordinaten und kartesischen Koordinaten gilt: y P (r/ϕ) x = r cos ϕ r y = r sin ϕ x2 + y 2 = r2 und tan ϕ = y x ϕ x Kinematik 5 • Zylinderkoordinaten (dreidimensional) Zylinderkoordinaten dienen der Bestimmung der Lage eines Punktes im Raum für Beschreibungen, in denen der Abstand des Punktes von einer Achse wesentlich ist. Zu den Polarkoordinaten der Ebene wird als dritte Dimension die z-Achse (als Höhenkoordinate) eingeführt. Die Koordinaten des Punktes P (r/ϕ/z) werden definiert durch den Abstand des Punktes von der Zylinderachse r, den Azimutwinkel ϕ und die Höhe z. • Kugelkoordinaten (dreidimensional) Ein Punkt wird durch seinen Abstand vom Koordinatenursprung und durch zwei Winkel angegeben. Liegt ein Punkt auf einer Kugeloberfläche (der Abstand vom Ursprung ist konstant) braucht man nur zwei Winkel, um einen Punkt eindeutig zu bezeichnen. Für die Festlegung eines Punktes auf der Erdoberfläche sind dies Längengrad: Azimutwinkel gegen einen Nullmeridian (Greenwich), gezählt von 0◦ bis 360◦ (oder 0 bis 2π). Breitengrad: Polarwinkel zwischen dem Äquator und dem Nordpol (Nordhalbkugel) und dem Südpol (Südhalbkugel), gezählt von 0◦ bis 180◦ (oder 0 bis π). Am einfachsten zu beschreiben ist die Bewegung eines materiellen Teilchens, da nur Translationen zu berücksichtigen sind. Bei einer allgemeinen Bewegung eines räumlich ausgedehnten starren Körpers kann der Körper zwei Bewegungsformen ausführen: Eine Translation und eine Rotation. Translation: Jedes Massenteilchen eines starren Körpers bewegt sich in jedem Zeitpunkt mit der gleichen, einheitlichen Geschwindigkeit v . Diese entspricht der Geschwindigkeit des Schwerpunkts vS . Deshalb sind die zurückgelegten Wege für alle Massenteilchen des starren Körpers gleich. • vS Rotation: Sämtliche Massenteilchen eines starren Körpers rotieren mit gleicher einheitlicher Winkelgeschwindigkeit ω um eine momentane Drehachse. Die Bahngeschwindigkeiten für die einzelnen Massenteilchen des Systems sind (i. Allg.) verschieden. ω • Kinematik 6 Allgemeine Bewegungsform: Es überlagern sich die Bewegungsformen der Translation und der Rotation. Die Beschreibung mit den Konzepten der Dynamik wird später für die allgemeine Bewegung eines starren Körpers eine Translation des Massenmittelpunkts und eine Rotation um den Massenmittelpunkt ergeben. Eine weitere Vereinfachung ist die Betrachtung einer eindimensionalen Bewegung, also die Berücksichtigung nur einer Koordinate (das mag die Bewegung eines Autos auf einer schnurgeraden Autobahn sein oder die Bewegung eines Schiffes auf einem mäandernden Fluss). Die Lage des Körpers wird eindeutig durch die Angabe eines Wertes, seiner Koordinate als dem Abstand von einem Referenzpunkt, genannt Nullpunkt, beschrieben. Ein Körper kann sich auf seiner – eindimensionalen – Bahn mit veränderlicher Geschwindigkeit bewegen. Zu Geschwindigkeitsänderungen gehört der Begriff Beschleunigung (bei negativer Beschleunigung spricht man besser von Abbremsen oder Verzögerung). Dieses Konzept wird für die eindimensionale Bewegung eines materiellen Teilchens vorgestellt. Die Begriffe Ort eines Teilchens (seine Koordinate), Geschwindigkeit und Beschleunigung sollen entwickelt und ihre wechselseitigen Beziehungen dargestellt werden. Allgemeine Bewegungen in einer Ebene oder im dreidimensionalen Raum werden durch zwei bzw. drei Koordinatenwerte beschrieben. Das mathematische Werkzeug zur Beschreibung sind Vektoren (siehe auch Kapitel IV). Die mathematisch-analytische Beschreibung von Bewegungen benutzt die Infinitesimalrechnung. Als physikalisches Konzept ist aber zum Verständnis nur wichtig: Differenzieren bedeutet die Bestimmung der (Tangenten-)Steigung einer Kurve. Integrieren bedeutet die Flächenbestimmung unter einer Kurve. Für die einzelnen Rechenschritte wendet man die formalen Regeln der Differentiation und Integration an. Für das physikalische Verständnis ist die sture rezeptartige Anwendung von Rechenregeln aber unerheblich. Und noch eines ist ganz wichtig: Jede physikalische Größe hat Einheiten (festgelegt im Internationalen Einheitensystem – SI-System). Der Einbezug dieser Einheiten macht die Physik wieder einfach, denn die mathematischen Operationen liefern notwendigerweise die korrekten physikalischen Einheiten. Im Vorgriff ein Beispiel: Bewegt sich ein Körper mit konstanter Geschwindigkeit, dann legt er in gleichen Zeitintervallen gleiche Wegstrecken zurück. In einem Diagramm, das den zurückgelegten Weg (von einen passend gewählten Nullpunkt aus) gegen die Zeit aufträgt, erhält man also eine lineare Beziehung, nämlich eine Gerade. Die Tangente an eine Gerade ist aber in allen Punkten die gleiche, sie wird durch die Steigung der Geraden repräsentiert. Lässt man die Bewegung vereinfachend vom Nullpunkt ausgehen, dann erhält man Diagramme der in Abb. 1-01 dargestellten Art. Kinematik 7 x/m 4 x/m 4 3 3 2 2 1 1 0 0 1 2 3 t/s 0 0 1 2 3 t/s Abb. 1-01: Die Steigung einer Geraden ist unabhängig vom gewählten Maßstab. Beispiel (im Vorgriff ): Weg-Zeit-Diagramm einer gleichförmigen Bewegung. Die Geschwindigkeit des Körpers ist konstant, in gleichen Zeitintervallen werden gleiche Wege zurückgelegt. Ändert man den Maßstab einer Darstellung, dann ändert sich überhaupt nichts an der Steigung der Geraden, wiewohl eine Gerade scheinbar steiler scheint als die andere. Die Steigung einer Geraden ist definiert als der Tangens des Steigungswinkels, und der ist eindeutig durch Gegenkathete und Ankathete definiert. Die Werte der beiden Katheten sind unabhängig vom gewählten Maßstab. Die Steigung m der Geraden ist in beiden Darstellungen natürlich die Gleiche, im Beispiel gegeben durch 4m Δx = = 1,33 m s−1 . mGerade = Δt 3s Die Steigung der Geraden entspricht der späteren Definition der (mittleren) Geschwindigkeit in einem Weg-Zeit-Diagramm. Der Einbezug der Einheiten Meter für Länge und Sekunde für Zeit, macht die Steigung sofort zum Maß einer Geschwindigkeit mit der Einheit Länge durch Zeit. Exkurs – Messung und Festlegung physikalischer Konstanten Die Werte der fundamentalen physikalischen Konstanten werden laufend an neue experimentelle Ergebnisse angepasst und ihre Fehlergrenzen festgelegt. Die Festlegung geschieht durch den International Council of Scientific Unions Committee on Data for Science and Technology (CODATA). CODATA-Werte finden sich im Internet unter http://physics.nist.gov. NIST steht für National Institute of Standards and Technology der USA in Boulder, Colorado. In Deutschland ist die Physikalisch Technische Bundesanstalt – PTB – in Berlin und Braunschweig für alle Aufgaben des Messwesens zuständig. Die Internet-Adresse ist http://www.ptb.de. Kinematik 8 SI-Zeiteinheit Die Sekunde ist das 9 192 631 770-fache der Periodendauer der dem Übergang zwischen den beiden Hyperfeinstrukturniveaus des Grundzustandes von Atomen des Nuklids 133 Cs (Cäsium) entsprechenden Strahlung. Die Sekunde kann von allen SI-Basiseinheiten am genauesten realisiert werden: Die primäre Atomuhr CS2 der PTB weicht in einem Jahr nur um eine millionstel Sekunde von der idealen Sekunde ab. SI-Längeneinheit Das Meter ist die Länge derjenigen Strecke, die das Licht im Vakuum während der Dauer von (1/299 792 458) Sekunden durchläuft. Die Meterdefinition weist der Lichtgeschwindigkeit c einen festen Wert zu. Diese Fundamentalkonstante kann somit nicht mehr gemessen werden, sie ist jetzt exakt vorgegeben. Hieraus folgt, dass die Längeneinheit von der Zeiteinheit Sekunde abhängt. Lichtgeschwindigkeit Als fundamental physikalische Konstante wurde auch die Lichtgeschwindigkeit mit stetig wachsender Präzision – aber immer noch mit Messfehlern – bestimmt. Präzisions-Laser-Messungen im Jahr 1973 (Boulder Gruppe des NIST ) ergaben: c = (299 792 457,4 ± 0,1) m s−1 Die Generalkonferenz für Maß und Gewicht – Conférence Générale des Poids et Mesures (CGPM) – legte 1983, zur Neudefinition des Meters, die Vakuumlichtgeschwindigkeit als fehlerfrei fest (relative Unsicherheit 0). c = 299 792 458 m s−1 1.2 Eindimensionale Bewegung Ort/Ortskoordinate – Geschwindigkeit – Beschleunigung Genügt für die Bewegung eines materiellen Teilchens die Angabe einer Koordinate, dann spricht man von einer eindimensionalen Bewegung. Das setzt für die Bahn des materiellen Teilchens aber nicht notwendig eine Gerade voraus, z. B. kann der Ort eines Schiffs auf einem Fluss eindeutig als Entfernung von der Quelle, oder allgemein eines passend gewählten Nullpunkts für die Entfernungsangabe, angegeben werden (vgl. Abb. 1-02). s(t + Δt) Δs s(t) E v(t + Δt) Δv E v(t) A A O Bahn Bahn O Abb. 1-02: Differenzenquotient zur Definition der mittleren Geschwindigkeit und der mittleren Beschleunigung. Kinematik 9 Die Geschwindigkeit ist ein Maß für die in einem Zeitintervall Δt zurückgelegte Wegstrecke Δs. Man definiert eine mittlere Geschwindigkeit oder durchschnittliche Geschwindigkeit vm im Zeitintervall Δt als Differenzenquotient vm = Δs s(t + Δt) − s(t) = (t + Δt) − (t) Δt (vgl. Abb. 1-02). Bei einer längeren Autofahrt, z. B. von Stuttgart nach München, sagt natürlich die durchschnittliche Geschwindigkeit nichts über die tatsächliche oder momentane Geschwindigkeit an einer gegebenen Ortskoordinate (z. B. dem Ort einer Radarkontrolle) aus. Andererseits gehen auch Zeiten, die der Autofahrer im Stau verbracht hat, in die Berechnung der durchschnittlichen Geschwindigkeit ein. Deshalb definiert man eine Momentangeschwindigkeit für ein sehr kleines Zeitintervall Δt mit dem mathematischen Grenzübergang als Differentialquotient ds Δs = = ṡ. v = lim Δt→0 Δt dt Weil Ableitungen nach der Zeit häufig vorkommen, benutzt man zur ihrer Kennzeichnung nicht einen Strich an der Funktion (wie dies bei Ableitungen nach dem Ort üblich ist), sondern zur Unterscheidung einen Punkt über dem Symbol für die Koordinate. Mathemad tisch ausgedrückt wird der Operator, also die prozedurale Rechenvorschrift ‘ ’ symbolisiert dt d durch ‘ = ˙’. dt ds Die anschauliche Bedeutung des Differentialquotienten ist die Steigung der Tangente im dt Weg-Zeit-Diagramm s(t). Abgeleitete SI-Einheit der Geschwindigkeit [Geschwindigkeit] = [Länge] [Zeit] oder [v] = 1 m = 1 m s−1 s Im vorigen Beispiel (vgl. Abb. 1-01) ist also die Steigung der Geraden gleich der (mittleren) Geschwindigkeit, diese ergibt sich zu 4m Δx = = 1,33 ms−1 . vm = mGerade = Δt 3s Beispiel: Gegeben ist das Weg-Zeit-Diagramm der Bewegung eines PKWs auf einer Landstraße (vgl. Abb. 1-03). (a) Bestimmen Sie die mittlere Geschwindigkeit für diese Fahrt. (b) Mit welcher maximalen Geschwindigkeit wurde gefahren? Liegt diese Geschwindigkeit im Bereich des Tempolimits vmax = 100 km h−1 auf Landstraßen? Kinematik 10 s/km 30 20 P 10 0 0 10 20 30 40 t/min 12,7 min Abb. 1-03: Weg-Zeit-Diagramm einer PKW-Fahrt. Graphische Bestimmung der mittleren und der maximalen Geschwindigkeit. Die beiden Steigungen ergeben sich zu: (a) Mittlere Geschwindigkeit: 30 km 30 km Δs vm = = = = 45 km h−1 1 −1 Δt 40 min 40 · 60 h (b) Maximale Geschwindigkeit: 30 km 30 km Δs = = = 142 km h−1 > 100 km h−1 vmax = 1 −1 Δt 12,7 min 12,7 · 60 h (Hoffentlich war dort keine Radaranlage aufgebaut.) Anmerkungen zu Differenzenquotient und Differentialquotient Der Differenzenquotient ist die wichtige und entscheidende Größe bei allen numerischen Simulationen zur Kinematik auf einem PC. Ein einschlägiges Rechenprogramm kann immer nur in diskreten Zeitschritten Δt weiterrechnen. Diese Schrittweite ist vorzugeben. So ist für die Simulation des freien Falls – als gleichmäßig beschleunigte Bewegung 1 – im Hörsaal eine Zeitschrittweite von Δt = s angemessen. Für die Simulation der 100 Erdbewegung um die Sonne sind Zeitschritte von Δt = 1 d (d für day) angemessen. Änderungen von Geschwindigkeiten werden durch den Begriff Beschleunigung beschrieben und erfasst. Zunächst definiert man wieder eine mittlere oder durchschnittliche Beschleunigung am im Zeitintervall Δt als Differenzenquotienten Δv v(t + Δt) − v(t) = am = (t + Δt) − (t) Δt Kinematik 11 und verschärft die Definition durch den Grenzübergang zu infinitesimalen Zeitintervallen Δt zur Momentanbeschleunigung dv Δv a = lim = = v̇ (vgl. Abb. 1-02). Δt→0 Δt dt Eine weitere mathematische Schreibweise ist a= dv d ds d2 s = ( ) = 2 = s̈. dt dt dt dt Die anschauliche Bedeutung des Differentialquotienten Geschwindigkeits-Zeit-Diagramm v(t). dv ist die Steigung der Tangente im dt Die abgeleitete Einheit der Beschleunigung im SI-System ist [Beschleunigung] = [Geschwindigkeit] [Zeit] oder [a] = 1 m s−1 = 1 m s−2 s Zusammenfassung Die Position (der Weg, der Ort, die Ortskoordinate) eines materiellen Teilchens wird beschrieben durch eine zeitabhängige Funktion, wie s(t), x(t) oder y(t). Die Geschwindigkeit zu jedem (beliebigen) Zeitpunkt wird dargestellt/repräsentiert durch die Tangentensteigung an die Weg-Zeit-Kurve. Daraus ergibt sich das Geschwindigkeits-Zeit-Diagramm. Die Beschleunigung zu jedem (beliebigen) Zeitpunkt wird dargestellt/repräsentiert durch die Tangentensteigung an die Geschwindigkeits-Zeit-Kurve. Für die in der Kinematik interessierenden Probleme sind die mathematisch strengen Forderungen nach Stetigkeit, . . . , usw. zumeist uninteressant. Graphisch lässt sich zur Bestimmung der Geschwindigkeit bzw. der Beschleunigung immer ein Steigungsdreieck im Weg-Zeit-Diagramm bzw. Geschwindigkeits-Zeit-Diagramm zeichnen und auswerten. Bei Vorliegen einer analytischen Funktion sind die Regeln der Differentialrechnung anzuwenden. Beispiel 1: Das Weg-Zeit-Gesetz sei analytisch durch ein Polynom 2. Grades gegeben x(t) = c0 + c1 t + c2 t2 , dabei sind c0 , c1 und c2 konstante Koeffizienten. Erinnerung: Die Ableitung einer Konstante ist null. Dann erhält man für das Geschwindigkeits-Zeit-Gesetz als 1. Ableitung v(t) = ẋ(t) = c1 + 2c2 t und für das Beschleunigungs-Zeit-Gesetz als 2. Ableitung a(t) = ẍ(t) = 2c2 = konst. Kinematik 12 Hinweis: Dieses Beispiel beschreibt – wie später gezeigt wird – u. a. den freien Fall eines Körpers im Schwerefeld der Erde. Es gilt für den freien Fall 1 x(t) = gt2 + v(0)t + x(0). 2 Die konstanten Koeffizienten bekommen dann die folgenden speziellen Bezeichnungen und Bedeutungen • c0 = x(0) Anfangskoordinate für den Zeitpunkt t = 0 s. • c1 = v(0) 1 c2 = g 2 Anfangsgeschwindigkeit für den Zeitpunkt t = 0 s. • Hinweis: mit der Fallbeschleunigung g an der Erdoberfläche. Die SI-Einheiten für die Konstanten sind verschieden. Es ist [c0 ] = 1 m, [c1 ] = 1 m s−1 und [c2 ] = 1 m s−2 . Beispiel 2 (vgl. Abb. 1-04): Das Weg-Zeit-Gesetz wird durch eine harmonische Funktion beschrieben. y = ŷ cos(ω0 t + ϕ0 ) Daraus ergibt sich die Geschwindigkeit als 1. Ableitung dy v= = ẏ = −ŷω0 sin(ω0 t + ϕ0 ) dt und die Beschleunigung als 2. Ableitung a= d2 y dv = 2 = ÿ = −ŷω02 cos(ω0 t + ϕ0 ). dt dt Hinweis: Dieses Beispiel beschreibt – wie später gezeigt wird – harmonische Schwingungen. Dabei ist (teilweise in Vorgriff auf spätere Definitionen) • y momentane Auslenkung mit der Einheit einer Länge, also [y] = 1 m, • ŷ Amplitude mit der Einheit einer Länge, also [ŷ] = 1 m, • ω0 Kreisfrequenz mit der Einheit [ω0 ] = 1 s−1 (damit ist die Einheit [ω0 t] = 1 s−1 s = 1 und das Argument der Sinus-Funktion dimensionslos), • ϕ0 Nullphasenwinkel, der zum Zeitpunkt t = 0 s die Phase bestimmt. Dies ist auch ein treffliches Beispiel dafür, dass mathematische Operationen bei Mitnahme der SI-Einheiten folgerichtig zu korrekten SI-Einheiten führen. Die Werte der harmonischen Kinematik 13 Funktionen sind reine Zahlen. Es gilt: −1 ≤ cos(ω0 t + ϕ0 ) ≤ +1 bzw. − 1 ≤ sin(ω0 t + ϕ0 ) ≤ +1 Man erhält für die SI-Einheiten • momentane Auslenkung den Vorfaktor ŷ, also die Einheit [y] = [ŷ] = 1 m, • Geschwindigkeit den Vorfaktor (ŷω0 ), also die Einheit [v] = [ŷω0 ] = 1 m s−1 , • Beschleunigung den Vorfaktor (ŷω02 ), also die Einheit [a] = [ŷω02 ] = 1 m s−2 . y ŷ t v = ẏ ω0 ŷ t a = ÿ ω02 ŷ t Abb. 1-04: Beispiel aus der Schwingungslehre: Ungedämpfte harmonische Bewegung – beschrieben durch eine Kosinus-Funktion. Dargestellt sind momentane Auslenkung, Geschwindigkeit und Beschleunigung. Für die analytische Darstellung vgl. Text. Nomenklatur übertragen aus der Schwingungslehre. 1.3 Kinematische Diagramme Bei der Definition von Geschwindigkeit und Beschleunigung sind die Regeln der Differentialrechnung anzuwenden. Physikalische Kenngröße ist jeweils die Steigung der Tangente an eine vorgegebene Kurve. In kinematischen Diagrammen bestimmt man Flächen unter vorgegebenen Kurven. Mathematisch bedeutet dies eine Summation bzw. Integration. Wichtig zum Verständnis ist das Stichwort Flächenbestimmung. Regeln zur Integration analytisch vorgegebener Funktionen vereinfachen zwar das Leben, sind aber für das physikalische Verständnis zweitrangig. Kinematik 14 Aus dem Geschwindigkeits-Zeit-Gesetz erhält man den zurückgelegten Weg durch Integration. Die Begründung dazu findet sich im Folgenden (vgl. Abb. 1-05). Aus der Definition der Geschwindigkeit Δs ds v(t) = bzw. v(t) = Δt dt wird, nach Umstellen, ein Einzelbeitrag Δsi im Zeitintervall Δti zum insgesamt zurückgelegten Weg Δsi = v(ti )Δti bzw. ds = v(t) dt. Die Summation aller Teilbeiträge bzw. im Grenzübergang die Integration liefert n n s= Δsi = v(ti )Δti bzw. s = ds = v(t) dt. i=1 i=1 Für ein unbestimmtes Integral ist noch eine Integrationskonstante s(0) zuzufügen. Die berücksichtigt die Koordinate (den Ort) zum (Anfangs)Zeitpunkt t = 0 s. s = ds = v(t) dt + s(0) (Integrationskonstante s(0)). Die anschauliche Bedeutung einer Integration ist die Flächenbestimmung unter der Kurve v(t). In Abb. 1-05 findet sich die Erinnerung an die Vorgehensweise der Mathematik (dort präziser mit Untersumme und Obersumme). v(t) graue Fläche = v̄n Δt v̄n tA Δt tE t Abb. 1-05: Kinematisches Diagramm: Der zurückgelegte Weg s(t) wird repräsentiert durch die Fläche unter der v(t)-Kurve. (Mathematische Realisierung: Von der Summenbildung zum Integral.) Für eine konstante Geschwindigkeit ist der zurückgelegte Weg proportional zur Zeit. Die Fläche unter einer horizontalen Geraden ist die Fläche eines Rechtecks (vgl. Abb. 1-06). Kinematik 15 v(t) = v0 = konst. v(t) Δt v0 v0 tA tE t Abb. 1-06: Kinematisches Diagramm: Graphische Darstellung einer gleichförmigen Bewegung (konstante Geschwindigkeit v(t) = konst.) Der zurückgelegte Weg s wird repräsentiert durch die Fläche unter der Kurve, also der Fläche eines Rechtecks, damit wird der zurückgelegte Weg s = v0 (tE − tA ). Für eine Geschwindigkeit, die linear mit der Zeit zunimmt, wird der zurückgelegte Weg durch die Fläche eines Dreiecks repräsentiert (vgl. Abb. 1-07). v(t) v(t) = a0 t a 0 tE tE 0 (tE − 0) = tE t Abb. 1-07: Kinematisches Diagramm: Graphische Darstellung einer gleichmäßig beschleunigten Bewegung v(t) = a0 t aus dem Stand (also mit v(0) = 0 m s−1 ). Der zurückgelegte Weg s wird repräsentiert durch die Fläche unter der Kurve, der Fläche eines Dreiecks, also wird der zurückgelegte Weg s = 12 tE (a0 tE ) = 12 a0 t2E . Aus dem Beschleunigungs-Zeit-Gesetz erhält man analog die erreichte Geschwindigkeit durch Integration, also aus der Definition der Beschleunigung dv Δv bzw. a(t) = a(t) = Δt dt wird nach Umstellen der Einzelbeitrag Δvi im Zeitintervall Δti zur erreichten Geschwindigkeit Δvi = a(ti )Δti bzw. dv = a(t)dt. Kinematik 16 Die Summation aller Teilbeiträge Δvi bzw. im Grenzübergang die Integration liefert n n v= Δvi = a(ti ) Δti bzw. v = dv = a(t) dt. i=1 i=1 Für ein unbestimmtes Integral ist noch eine Integrationskonstante v(0) zuzufügen. Sie berücksichtigt die Geschwindigkeit zum (Anfangs)Zeitpunkt t = 0 s. Die anschauliche Bedeutung der Integration ist die Flächenbestimmung unter der Beschleunigungs-Zeit-Kurve a(t). Sonderfall: Gleichmäßig beschleunigte Bewegung (Beispiel: Der freie Fall eines Körper nahe der Erdoberfläche mit der konstanten Fallbeschleunigung g(t) = gn = konst., idealisierend ohne Berücksichtigung des Luftwiderstands.) Eine konstante Beschleunigung bedeutet (vgl. Abb. 1-08): a(t) = a0 = konst. a a0 t Abb. 1-08: Beschleunigungs-Zeit-Diagramm einer eindimensionalen gleichmäßig beschleunigten Bewegung mit zeitlich konstanter Beschleunigung a0 . Die Fläche unter der horizontalen Geraden repräsentiert die erreichte Geschwindigkeit (vgl. Abb. 1-09). Durch einmalige Integration erhält man daraus die im Zeitintervall tAnfang ≤ t ≤ tEnde erreichte Geschwindigkeit (übernommen in Abb. 1-09) v(t) = dv = a0 dt + v(0) = a0 dt + v(0) = a0 t + v(0). Die Geschwindigkeit nimmt linear mit der Zeit zu, zum Zeitpunkt t = 0 s ist die (Anfangs)Geschwindigkeit v(0). Durch weitere Integration erhält man daraus den im Zeitintervall tAnfang ≤ t ≤ tEnde zurückgelegten Weg (vgl. Abb. 1-10 und 1-11) s = ds = v(t) dt + s(0) mit v(t) = a0 t + v(0) Kinematik 17 wird daraus s = (a0 t + v(0)) dt + s(0) = a0 t dt + v(0) dt + s(0) 1 2 a0 t + v(0)t + s(0). 2 Die Anfangsbedingungen für den Startzeitpunkt t = 0 s sind (vgl. Abb. 1-11) = • v(0) Anfangsgeschwindigkeit, • s(0) Anfangskoordinate. v v(t) = a0 t + v(0) (b) v(t) = a0 t (a) v(0) t Abb. 1-09: Geschwindigkeits-Zeit-Diagramm einer gleichmäßig beschleunigten Bewegung mit zeitlich konstanter Beschleunigung a0 (vgl. Abb. 1-08). Die erreichte Geschwindigkeit v(t). Die Flächen unter den Geraden repräsentieren die jeweils zurückgelegten Wege (übernommen in Abb. 1-10). (a) bei Start aus dem Stand (v(0) = 0 m s−1 ) und (b) bei einer Anfangsgeschwindigkeit v(0) (im Diagramm v(0) > 0 ms−1 ) . s(t) = 12 a0 t2 + s(0) (b) s s(t) = 12 a0 t2 (a) s(0) t Abb. 1-10: Weg-Zeit-Diagramm einer gleichmäßig beschleunigten Bewegung (a0 = konst., vgl. Abb. 1-08). Die zurückgelegten Wege s(t) bei einer Anfangsgeschwindigkeit v(0) = 0 m s−1 , (a) bei Start am Koordinatennullpunkt (s(0) = 0 m) und (b) bei einer Anfangskoordinate s(0) (im Diagramm s(0) > 0 m). Kinematik 18 s s(t) = 12 a0 t2 + v(0)t + s(0) s(t) = 12 a0 t2 s(t) = v(0)t + s(0) s(0) t Abb. 1-11: Weg-Zeit-Diagramm einer gleichmäßig beschleunigten Bewegung (a0 = konst., vgl. Abb. 1-08). Beiträge zum zurückgelegten Weg durch die Beschleunigung a0 , der Anfangsgeschwindigkeit v(0) und der Anfangskoordinate s(0), zurückgelegter Weg s = 12 a0 t2 + v(0)t + s(0). Hinweis: Im Diagramm sind s(0) > 0 m und v(0) > 0 m s−1 gewählt – diese können aber auch negativ sein. Zusammenfassung – Gleichmäßig beschleunigte Bewegung Konstante Beschleunigung a = a0 = konst(t). (vgl. Abb. 1-08) Erreichte Geschwindigkeit als Funktion der Zeit v = a0 t + v(0) (vgl. Abb. 1-09) Zurückgelegter Weg als Funktion der Zeit 1 s = a0 t2 + v(0)t + s(0) (vgl. Abb. 1-10 und 1-11) 2 Spezialfall des Sonderfalls Für eine konstante Beschleunigung a0 = konst. seien speziell die Anfangsbedingungen zum Zeitpunkt t = 0 s • v(t = 0 s) = v(0) = 0 m s−1 keine Anfangsgeschwindigkeit (aus dem Stand / aus der Ruhe) • s(t = 0 s) = s(0) = 0 m Start im Koordinatenursprung (vom Nullpunkt aus), Kinematik 19 dann wird die in der Zeit t erreichte Geschwindigkeit v = a0 t und der in der Zeit t zurückgelegte Weg 1 s = a 0 t2 . 2 Daraus ergibt sich eine ganz spezielle Beziehung 1 v 1 1 1 v2 (a0 t)t = vt = v = . 2 2 2 a0 2 a0 Dies gilt nur bei konstanter Beschleunigung und bei den speziell angegeben Anfangsbedingungen. s= Beispiel: Bestimmung der Beschleunigungen und der zurückgelegten Wege aus einem Geschwindigkeits-Zeit-Diagramm (vgl. Abb. 1-12). Eine Kommilitonin stellt ihr neues Auto vor. Im Diagramm findet sich ein idealisiertes Geschwindigkeits-Zeit-Gesetz für einen Anfahrvorgang, anschließender Fahrt und danach einen Bremsvorgang. (a) Bestimmen Sie die Beschleunigungen in den drei Abschnitten. (b) Bestimmen Sie den insgesamt zurückgelegten Weg. v v1 = 14 m s−1 t1 = 15 s t2 = 40 s t3 = 50 s t Abb. 1-12: Beispiel: Idealisiertes Geschwindigkeits-Zeit-Diagramm einer eindimensionalen Bewegung eines PKWs mit (1) Anfahren im Zeitintervall 0 s ≤ t ≤ 15 s (gleichmäßig beschleunigt), (2) Fahrt im Zeitintervall 15 s ≤ t ≤ 40 s (konstante Geschwindigkeit) und (3) Abbremsen im Zeitintervall 40 s ≤ t ≤ 50 s (gleichmäßig verzögert). Der zurückgelegte Gesamtweg s wird repräsentiert durch die Fläche des Trapezes. Die Beschleunigungen werden in den drei Abschnitten durch die Steigungen der Geraden repräsentiert (Lösungen vgl. Text). Lösung Die Beschleunigung ist definiert als die Steigung der Tangente an eine Geschwindigkeits-ZeitKurve. Wird die Kurve durch eine Gerade dargestellt, dann ist die Beschleunigung konstant und durch die Steigung der Geraden gegeben. Kinematik 20 Zeitintervall 0 s ≤ t ≤ 15 s Die Steigung der Geraden ist positiv, das bedeutet beschleunigen, also Geschwindigkeitszunahme, ihr Betrag ergibt sich aus dem Steigungsdreieck 14 m s−1 Δv = = 0,933 m s−2 . Δt 15 s Zeitintervall 15 s ≤ t ≤ 40 s a1 = Die Steigung der Geraden ist null, damit ist die Beschleunigung a1 = 0 m s−2 , wie dies bei konstanter Geschwindigkeit auch sein muss! Zeitintervall 40 s ≤ t ≤ 50 s Die Steigung der Geraden ist negativ, das bedeutet abbremsen, also Geschwindigkeitsabnahme, ihr Betrag ergibt sich aus dem Steigungsdreieck 14 m s−1 Δv = = 1,40 m s−2 . Δt 10 s Der zurückgelegte Weg wird repräsentiert durch die Fläche unter der Geschwindigkeits-ZeitKurve. Im Beispiel sind dies die Flächen zweier Dreiecke und eines Rechtecks. Einbezug der SI-Einheiten für Geschwindigkeit und Zeit liefert für den zurückgelegten Weg die korrekte Einheit des Wegs in der Längeneinheit m. a1 = Zeitintervall 0 s ≤ t ≤ 15 s Die Fläche des Dreiecks unter der Geraden ist gegeben durch 1 s1 = (15 s)(14 m s−1 ) = 105 m. 2 Zeitintervall 15 s ≤ t ≤ 40 s Die Fläche des Rechtecks unter der horizontal verlaufenden Geraden ist gegeben durch s2 = (40 s − 15 s)(14 m s−1 ) = (25 s)(14 m s−1 ) = 350 m. Zeitintervall 40 s ≤ t ≤ 50 s Die Fläche des Dreiecks unter der Geraden ist gegeben durch 1 1 s3 = (50 s − 40 s)(14 m s−1 ) = (10 s)(14 m s−1 ) = 70 m. 2 2 Der zurückgelegte Gesamtweg ergibt sich durch Summation der drei Teilbeiträge zu sges = s1 + s2 + s3 = 105 m + 350 m + 70 m = 525 m. 1.4 Bewegungen in der Ebene – zweidimensionale Kinematik Für die Beschreibung von Bewegungen in einer Ebene gilt das Superpositionsprinzip: Die zwei eindimensionalen Bewegungen in den beiden Koordinatenrichtungen überlagern sich vollkommen ungestört. Standardaufgaben in diesem Bereich sind Wurfbewegungen in der Nähe der Erdoberfläche, die vereinfachend ohne Luftwiderstand gerechnet werden. Dabei leben aber sämtliche Sportarten von der Lufthülle und ihrem Einfluss auf Bewegungen. So fliegt ein Diskus durch seinen Anstellwinkel in Luft weiter als er im Vakuum flöge (so man denn sonst alles gleich lassen könnte, also die Sportler nicht durch Weltraumanzüge behinderte). Auch die Sprungweite von Skispringern oder besser Skifliegern hängt sehr stark von den Windverhältnissen ab. Kinematik 21 Beispiel: Waagrechter Wurf (Im Schwerefeld der Erde bei Vernachlässigung des Luftwiderstands.) Ein schwerer Körper (z. B. ein schweres Bleiklötzchen, aber nicht ein leichtes Styroporbällchen, um den Einfluss des Luftwiderstands vernachlässigbar klein zu halten) wird waagrecht über die Kante eines Tisches (Höhe H über dem Boden) geschossen. Seine Anfangsgeschwindigkeit an der Kante in Abschussrichtung ist v0x . x y Zur Beschreibung muss man zunächst ein Koordinatensystem einführen. Es bietet sich an, die waagrechte Abschussrichtung als positive x-Richtung zu nehmen und den Nullpunkt an die Tischkante zu legen. Das Klötzchen fällt auf die Erde, die konstante Erdbeschleunigung ist senkrecht nach unten gerichtet, deshalb ist es eine zweckmäßige Wahl, die positive yRichtung nach unten zu nehmen um mit positiven Werten rechnen zu können. Damit ergibt sich folgende Beschreibung für die Bewegung des Klötzchens: In positive x-Richtung ergibt sich eine Bewegung mit konstanter Geschwindigkeit v0x , also ein Weg-Zeit-Gesetz mit der Anfangskoordinate x(0) = 0 m, der zurückgelegte Weg wird x = v0x t. In positive y-Richtung ergibt sich eine Bewegung mit konstanter Beschleunigung (der Erdbeschleunigung gn ) ohne Anfangsgeschwindigkeit, also mit v0y = 0 m s−1 von der Anfangskoordinate y(0) = 0 m aus. Das Weg-Zeit-Gesetz in y-Richtung lautet also 1 y = g n t2 . 2 Diese beiden Bewegungen überlagern sich ungestört. Aus dem freien Fall ergibt sich die Fallzeit tF bis zum Aufschlag auf dem Boden bei der (positiven) y-Koordinate H, also gilt 2H 2H 1 2 und tF = ± . H = gn tF daraus t2F = 2 gn gn Das negative Vorzeichen ist zwar mathematisch korrekt, aber physikalisch sinnlos. Die Bewegung in x-Richtung hört beim Aufprall zum Zeitpunkt t = tF auf. Daraus erhält man sofort die Flugweite xF , also den waagrechten Abstand von der Tischkante. Damit wird 2H . xF = v0x tF = v0x gn Die mathematische Beschreibung der Bahnkurve im x,y-Koordinatensystem erhält man durch Elimination der Zeit t aus den beiden Bewegungsgleichungen in x- und y-Richtung: x x = v0x t liefert t = , v0x Kinematik 22 eingesetzt y= 1 2 1 x2 1 gn 2 2 gn t = gn 2 = 2 x = konst. · x . 2 2 v0x 2 v0x Dies ist die Gleichung einer Parabel. Natürlich gilt diese Beziehung nur solange, bis das Klötzchen auf dem Boden angekommen ist. Und die Flugweite ergibt sich aus der Fallhöhe y = H zu 1 gn 2 2H 2H H= ⇒ x2F = v2 ⇒ xF = v0x 2 xF 2 v0x gn 0x gn in Übereinstimmung mit dem bereits oben erhaltenen Ergebnis. 1.5 Bewegungen in drei Raumrichtungen – Vektoren Das mathematische Werkzeug zur Behandlung von Bewegungsproblemen im dreidimensionalen Raum sind Vektoren. Ein Vektor ist gekennzeichnet durch seine Richtung und seinen Betrag. Der Betrag eines Vektors wird ausgedrückt in Vielfachen des Betrags eines Einheitsvektors, dieser gibt die Richtung an und hat den Betrag eins (vgl. Abb. 1-13). y a j a O ea e=1 i x k z Abb. 1-13: Vektoren. Teilbild (a) Vektor und Einheitsvektor, Teilbild (b) Einheitsvektoren in einem kartesischen (Rechts)Koordinatensystem. Zur Kennzeichnung von Vektoren benutzt man zumeist einen Pfeil über dem physikalischen Symbol, oft werden auch zur Kennzeichnung die physikalischen Symbole fett gedruckt. Man beschreibt den Ortsvektor, der die Lage eines materiellen Teilchens im dreidimensionalen Raum festlegt, mit r oder r . Der Ortsvektor r zeigt vom Koordinatennullpunkt (O) zum Ort des materiellen Teilchens (x/y/z). Die Schreibweise erfolgt als Spaltenvektor oder als Zeilenvektor. Die Reihenfolge der Komponenten ist x, y, und z. ⎛ ⎞ x(t) Eine Darstellung als Spaltenvektor lautet r(t) = ⎝y(t) ⎠. z(t) Kinematik 23 Die Einheitsvektoren in einem kartesischen Rechts-Koordinatensystem werden mit i, j und k bezeichnet. Ihre Vektordarstellung (vgl. Abb. 1-13) ist ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ 1 0 0 i = ⎝0⎠ j = ⎝1⎠ k = ⎝0⎠ . 0 0 1 Für die Bestimmung von Geschwindigkeit und Beschleunigung in Vektorschreibweise werden, wie im eindimensionalen Fall, die einzelnen Komponenten differenziert. Beispiel (vereinfachend zweidimensional): Beschreibung der Position eines materiellen Teilchens, das mit konstanter Winkelgeschwindigkeit ω auf einer Kreisbahn mit Radius R um ein Drehzentrum umläuft. Man wählt die Drehachse als Nullpunkt eines kartesischen Koordinatensystems und zerlegt die Bewegung des Teilchens in kartesische Komponenten (vgl. Abb. 1-14). ω ry ϕ = ωt rx R Abb. 1-14: Vektordarstellung einer gleichförmigen Kreisbewegung. Ein materielles Teilchen läuft mit konstanter Winkelgeschwindigkeit ω auf einer Kreisbahn um. Die Vektorkomponenten sind rx = R cos ωt und ry = R sin ωt (mathematische Beschreibung vgl. Text). Die Zeitabhängigkeit des Radiusvektors r – als Spaltenvektor dargestellt – stellt das WegZeit-Gesetz des umlaufenden Teilchens dar. ⎛ ⎞ ⎛ ⎞ R cos ωt cos ωt r = ⎝ R sin ωt ⎠ = R ⎝ sin ωt ⎠ 0 0 Durch Ableiten der Vektor-Komponenten nach der Zeit erhält man das GeschwindigkeitsZeit-Gesetz ⎛ ⎞ ⎛ ⎞ ω · (−1) · sin ωt − sin ωt ⎠ = Rω ⎝ cos ωt ⎠ . ω cos ωt v = r˙ = R ⎝ 0 0 Durch Ableiten der Vektor-Komponenten nach der Zeit erhält man das BeschleunigungsZeit-Gesetz ⎛ ⎞ ⎞ ⎛ cos ωt −ω cos ωt a(t) = v˙ (t) = r¨(t) = Rω ⎝ω · (−1) · sin ωt⎠ = −Rω 2 ⎝ sin ωt ⎠ . 0 0 Kinematik 24 Ersetzt man in der letzten Darstellung den Ausdruck für das Weg-Zeit-Gesetz ⎛ ⎞ cos ωt r = R ⎝ sin ωt ⎠ , 0 dann bleibt ⎛ ⎞ cos ωt a(t) = −ω 2 R ⎝ sin ωt ⎠ = −ω 2r(t), 0 d. h. der Vektor der Beschleunigung a(t) ist dem Radiusvektor r(t) stets entgegen gerichtet. Der Radiusvektor zeigt vom Nullpunkt zum materiellen Teilchen. Die Beschleunigung ist also auf den Nullpunkt des Koordinatensystems hin gerichtet, dem Zentrum der Drehbewegung. Bei der gleichförmigen Kreisbewegung ist das die Zentripetalbeschleunigung. Eine ausführliche Beschreibung von Vektoren und den zugehörigen Rechenoperationen finden sich in Kapitel IV. 1.6 Bewegungen auf einer Kreisbahn Zweckmäßigerweise gibt man die Position eines materiellen Teilchens, das auf einer Kreisbahn (Radius r) umläuft, als Drehwinkel ϕ gegenüber einer vordefinierten Referenzrichtung (Nullrichtung) an. Definition des Winkels im Bogenmaß (vgl. Abb. 1-15) s ϕ r Abb. 1-15: Bogenmaß – Definition des Winkels. Im Bogenmaß hat der Winkel die Einheit 1. [Winkel] = [Länge] [Länge] [ϕ] = 1 m =1 m Um dimensionslose physikalische Größen trotzdem eindeutig zu kennzeichnen, benutzt man zusätzliche Einheitensymbole. Für den Winkel im Bogenmaß ist dieses Einheitensymbol 1 Radiant = 1 rad (vgl. auch den Schallintensitätspegel in dB – deziBel oder die Erdbebenstärke auf der Richter-Skala). Kinematik 25 Vorzeichenkonvention: Eine Drehung im Gegenuhrzeigersinn ist die positive Drehrichtung. Dies folgt aus der Festlegung eines Rechtssystems, visualisiert als Rechte-Faust-Regel: Zeigt der Daumen der rechten Hand als Drehachse nach oben, dann zeigen die vier anderen Finger in die Richtung der Drehung. & Als Nullrichtung nimmt man i. Allg. die positive x-Achse in einem kartesischen Koordinatensystem. ϕ(t + Δt) ω v Δϕ ϕ(t) ω r Abb. 1-16: Gleichförmige Kreisbewegung und überstrichener Winkel. Definition der Winkelgeschwindigkeit. (a) Differenzenquotient und (b) spätere Interpretation in Vektorschreibweise, r Radiusvektor zum Bahnpunkt, v Bahngeschwindigkeit, ω ein axialer Vektor, der nach der Rechte-Hand-Regel die Kreisbewegung repräsentiert (im Vorgriff ein Beispiel für ein Vektorprodukt: Es gilt v = ω × r). Geschwindigkeit und Beschleunigung Umstellen der Definition für den Drehwinkel Bogenlänge s(t) ϕ(t) = Radius r liefert für die zurückgelegte Bogenlänge, also den Weg auf der Kreisbahn Bogenlänge s(t) = (Radius r = konst.) · (Winkel ϕ(t)) oder allgemeiner ein Weg-Zeit-Gesetz s(t) = rϕ(t). Geschwindigkeit und Beschleunigung eines Teilchens erhält man durch ein-, bzw. zweimaliges Ableiten des Weg-Zeit-Gesetzes. Für die Bewegung eines Teilchens auf einer Kreisbahn ist der Radius konstant. Man erhält für die Geschwindigkeit v(t) = ds(t) dϕ(t) =r . dt dt Kinematik 26 Für die Änderung des Drehwinkels ϕ(t) mit der Zeit t definiert man eine Winkelgeschwindigkeit ω (vgl. Abb. 1-16) als dϕ Δϕ = = ϕ̇. Δt dt Die SI-Einheit der Winkelgeschwindigkeit ist ω = lim Δt→0 [ω] = 1 rad s−1 , damit gilt für die Bahngeschwindigkeit v(t) = rω(t). Die Beschleunigung erhält man durch Ableiten des Geschwindigkeits-Zeit-Gesetzes zu dv(t) dω(t) =r . dt dt Für die Änderung der Winkelgeschwindigkeit ω(t) mit der Zeit t definiert man eine Winkelbeschleunigung α als dω Δω = = ω̇ = ϕ̈. α = lim Δt→0 Δt dt Die SI-Einheit der Winkelbeschleunigung ist a(t) = [α] = 1 rad s−2 , damit gilt für die Beschleunigung eines Teilchens die Beziehung a(t) = rα(t). Analog zu den kinematischen Diagrammen (Flächenbestimmung unter vorgegebenen Kurven – Integration) der eindimensionalen Bewegung, kann man aus dem WinkelbeschleunigungsZeit-Gesetz die Winkelgeschwindigkeit und anschließend den überstrichenen Winkel bestimmen. Die Herleitungen sind analog zu den Herleitungen in Abschnitt 1.3 zur eindimensionalen Bewegung. In den zugehörigen Diagrammen ist die abhängige Variable einfach zu ersetzen: • Beschleunigung a(t) durch Winkelbeschleunigung α(t), • Geschwindigkeit v(t) durch Winkelgeschwindigkeit ω(t), • Weg s(t) oder x(t) durch Winkel ϕ(t). (Hinweis: Winkel ϕ im Bogenmaß (rad)) Aus dem Winkelgeschwindigkeits-Zeit-Gesetz erhält man den überstrichenen Winkel durch Integration. Die Begründung dazu im Folgenden: Aus der Definition der Winkelgeschwindigkeit dϕ Δϕ bzw. ω(t) = ω(t) = Δt dt wird, nach Umstellen, ein Einzelbeitrag Δϕi im Zeitintervall Δti zum insgesamt überstrichenen Winkel Δϕi = ω(ti )Δti bzw. dϕ = ω(t) dt. Kinematik 27 Die Summation aller Teilbeiträge bzw. im Grenzübergang die Integration liefert n n ϕ= Δϕi = ω(ti )Δti bzw. ϕ = dϕ = ω(t) dt. i=1 i=1 Für ein unbestimmtes Integral ist noch eine Integrationskonstante ϕ(0) zuzufügen. Diese berücksichtigt den Winkel zum (Anfangs)Zeitpunkt t = 0 s. ϕ = dϕ = ω(t) dt + ϕ(0) (Integrationskonstante ϕ(0)). Für eine konstante Winkelgeschwindigkeit ist der überstrichene Winkel proportional zur Zeit. Die Fläche unter einer horizontalen Geraden ist die Fläche eines Rechtecks. Für eine Winkelgeschwindigkeit, die linear mit der Zeit zunimmt, wird der überstrichene Winkel durch die Fläche eines Dreiecks repräsentiert. Aus dem Winkelbeschleunigungs-Zeit-Diagramm erhält man analog die erreichte Winkelgeschwindigkeit durch Integration. Aus der Definition der Winkelbeschleunigung Δω dω α(t) = bzw. α(t) = Δt dt wird nach Umstellen der Einzelbeitrag Δωi im Zeitintervall Δti zur erreichten Winkelgeschwindigkeit Δωi = α(ti )Δti bzw. dω = α(t) dt. Die Summation aller Teilbeiträge Δωi bzw. im Grenzübergang die Integration liefert n n Δωi = α(ti )Δti bzw. ω = dω = α(t) dt. ω= i=1 i=1 Für ein unbestimmtes Integral ist noch eine Integrationskonstante ω(0) zuzufügen. Sie berücksichtigt die Winkelgeschwindigkeit zum (Anfangs)Zeitpunkt t = 0 s. Die anschauliche Bedeutung der Integration ist die Flächenbestimmung unter der Kurve α(t). Zusammenfassung Translation Rotation Bedingung: Bedingung: Beschleunigung a0 = konst. Winkelbeschleunigung α0 = konst. Geschwindigkeits-Zeit-Gesetz: Winkelgeschwindigkeits-Zeit-Gesetz: v(t) = a0 t + v(0) mit v(t = 0 s) = v(0) Weg-Zeit-Gesetz: s(t) = 1 2 2 a0 t + v(0)t + s(0) mit s(t = 0 s) = s(0) ω(t) = α0 t + ω(0) mit ω(t = 0 s) = ω(0) Winkel-Zeit-Gesetz: ϕ(t) = 12 α0 t2 + ω(0)t + ϕ(0) mit ϕ(t = 0 s) = ϕ(0) (Hinweis: Winkel ϕ im Bogenmaß.)