Diplomvorprüfung Technische Mechanik III und IV in den
Werbung

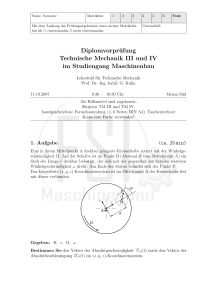
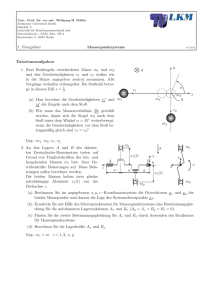
Name, Vorname Matrikelnr. 1 2 3 4 Mit dem Aushang des Prüfungsergebnisses unter meiner Matrikelnr. bin ich 2 einverstanden 2 nicht einverstanden. 5 6 Note Unterschrift Diplomvorprüfung Technische Mechanik III und IV in den Studiengängen Maschinenbau und Mechatronik Lehrstuhl für Technische Mechanik Prof. Dr.–Ing. habil. G. Kuhn, Prof. Dr.–Ing. habil. K. Willner 12.10.2006 8:30 — 10:30 Uhr Mensa Süd, H7 Als Hilfsmittel sind zugelassen: handgeschriebene Formelsammlung (≤ 6 Seiten, gelbes Papier), Taschenrechner 1. Aufgabe (ca. 15 min) Gegeben ist das unten dargestellte Planetengetriebe. Es besteht aus dem Sonnen(Index S) und dem Hohlrad (Index H), sowie den Planetenrädern (Index P) und dem Planetenträger (Index T). Betrachtet werden die folgenden beiden Fälle: Fall a) Das Hohlrad ist fest gelagert, das Sonnenrad und der Planetenträger sind drehbar gelagert. Am Planetenträger sind die Planetenräder drehbar befestigt. Fall b) Das Sonnen- und das Hohlrad, sowie die Planetenräder sind drehbar gelagert. In beiden Fällen wird das Sonnenrad angetrieben. Planetenträger T ϕS rS Sonnenrad S ϕS rS rP rP Planetenrad P Fall a Hohlrad H Fall b Gegeben: ϕ̇S , rS , rP Bestimmen Sie den kinematischen Zusammenhang zwischen den Winkelgeschwindigkeiten ϕ˙S des Sonnenrades und . . . 1.1 (Fall a) . . . ϕ̇T des Planetenträgers, sowie die Drehrichtung des Planetenträgers; 1.2 (Fall b) . . . ϕ̇H des Hohlrades, sowie die Drehrichtung des Hohlrades. 2. Aufgabe (ca. 15 min) Betrachtet wird der unten dargestellte Hebel. Er besteht aus einem Rohr (1), zwei Stäben (2), einer massiven Kugel (3) und einem Vollzylinder (4). Die Stäbe enden jeweils auf den Oberflächen der Zylinder, bzw. der Kugel. Für die Massen der einzelnen Elemente gilt: 4 r (1) Rohr: m1 = 5m 2 (2) Stab: m2 = 23 m (3) Kugel: m3 = 5m 1 l A r (4) Vollzylinder: m4 = 2m Gegeben: m, r, l = 6r 3r A Bestimmen Sie das Massenträgheitsmoment des Hebels bezüglich der Achse A-A. 2 Hinweis: l r 3 S R JS,Kugel = 25 M R2 M 3. Aufgabe (ca. 20 min) Betrachtet wird das unten dargestellte System. Es besteht aus der Punktmasse 1 (Masse 31 m, Geschwindigkeit v0 ), einem reibungsfrei um A drehbar gelagerten Stab (Masse m, Länge 2l) und der Punktmasse 2 (Masse 2m). Sowohl der Stab, als auch die Punktmasse 2 befinden sich zunächst in Ruhe. Dann kommt es zu einem vollplastischen Stoß zwischen der Punktmasse 1 und dem Stab. Danach findet ein vollkommen elastischer Stoß mit der Punktmasse 2 statt. Punktmasse 2 2m Gegeben: m, v0 , l Bestimmen Sie l 3.1 die Winkelgeschwindigkeit Ω, mit der sich der Stab unmittelbar nach dem ersten Stoß dreht; m A l 1/3 m v0 Punktmasse 1 3.2 die Geschwindigkeit V2 , mit der sich die Punktmasse 2 nach dem zweiten Stoß bewegt. 4. Aufgabe (ca. 20 min) Gegeben ist das unten dargestellte System. Es besteht aus einem Klotz (Masse m, Anfangsgeschwindigkeit v0 , Ausgangshöhe h), der ausgehend von Punkt A zunächst reibungsfrei eine schiefe Ebene hinabgleitet. Anschließend gleitet der Klotz eine um den Winkel α geneigte Ebene hinauf. Ab Punkt C wird der Klotz durch Reibung (Reibkoeffizient µ) abgebremst. v0 m g A vC h α s µ C h1= ? B q Gegeben: m, v0 , g, h, µ, α, vC = 3 gh 2 + v02 Bestimmen Sie 4.1 den Ort und den Betrag der maximalen Geschwindigkeit vmax ; 4.2 h1 so, dass sich der Klotz im Punkt C genau mit der Geschwindigkeit vC bewegt; 4.3 den Weg s1 , nach dem der Klotz die Geschwindigkeit 0 hat; 4.4 die nötige Bedingung für µ, damit der Klotz nach Ende der Bewegung liegen bleibt und sich nicht die Ebene hinabbewegt. 5. Aufgabe (ca. 20 min) Gegeben ist das unten dargestellte, schwingungsfähige System, bei dem lediglich kleine Auslenkungen um die Ruhelage ϕ = 0 auftreten. Es besteht aus einer linearen Feder (Federsteifigkeit c), einer dünnen Scheibe (Radius r, Masse m), einem Stab (Masse m) und einem geschwindigkeitsproportionalen Dämpfer (Dämpfungskonstante k). Die Scheibe ist reibungsfrei und drehbar in A gelagert. Im Punkt B ist die Feder und im Punkt C ist der Stab an der Scheibe befestigt. Angeregt wird das System über die am Ende der Feder angreifende Wegerregung u(t). k u(t) m C Gegeben: m, c, k, r, u(t) c ϕ r A m B Bestimmen Sie 5.1 die Schwingungsdifferentialgleichung des Systems in Abhängigkeit vom Drehwinkel ϕ; 5.2 die Eigenkreisfrequenz ω, sowie das Lehrsche Dämpfungsmaß D des Systems. 6. Aufgabe (ca. 30 min) Der abgebildete Balken der Länge l und der Biegesteifigkeit EI ist links fest eingespannt. Es greifen eine lineare Streckenlast (Maximum q0 ), sowie die Einzelkraft F bei x = l/2 an. l l/2 F EI x z q0 Gegeben: l, EI, F , q0 sowie die Ansatzfunktionen ϕ1 (x) = x2 , ϕ2 (x) = x3 . Verwenden Sie bei der Beantwortung der nachfolgenden Fragen stets das angegebene Koordinatensystem! 6.1 Geben Sie die Randbedingungen an, die bei der Wahl der Ansatzfunktionen eines möglichen Rayleigh-Ritz-Ansatzes zur Bestimmung einer Näherungslösung für die Durchsenkung zu berücksichtigen sind. 6.2 Wählen Sie eine möglichst einfache, aber erlaubte Ansatzfunktion für ϕ0 (x), wenn der Rayleigh–Ritz–Ansatz für die Durchsenkung w(x) die allgemeine Form Pn w̄(x) = ϕ0 (x) + i=1 αi ϕi (x) besitzt. 6.3 Bestimmen Sie mit dem Verfahren von Rayleigh-Ritz eine Näherungslösung für die Durchsenkung w(x) unter Verwendung der gegebenen Ansatzfunktionen. 6.4 Bestimmen Sie unter Verwendung der gefundenen Lösung die Kraft F so, dass die Durchsenkung bei x = l/2 gerade verschwindet.