Diplomvorprüfung Technische Mechanik III und IV im Studiengang
Werbung

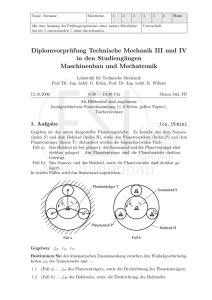
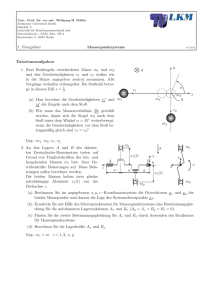
Name, Vorname Matrikelnr. 1 2 3 Mit dem Aushang des Prüfungsergebnisses unter meiner Matrikelnr. bin ich 2 einverstanden 2 nicht einverstanden. 4 5 Σ Note Unterschrift Diplomvorprüfung Technische Mechanik III und IV im Studiengang Maschinenbau Lehrstuhl für Technische Mechanik Prof. Dr.–Ing. habil. G. Kuhn 11.10.2007 8:30 — 10:30 Uhr Mensa Süd Als Hilfsmittel sind zugelassen: Skripten TM III und TM IV, handgeschriebene Formelsammlung (≤ 6 Seiten DIN A4), Taschenrechner Keine rote Farbe verwenden! 1. Aufgabe (ca. 20 min) Eine in ihrem Mittelpunkt A drehbar gelagerte Kreisscheibe rotiert mit der Winkelgeschwindigkeit Ω. Auf der Scheibe ist im Punkt B (Abstand R vom Mittelpunkt A) ein Stab der Länge r drehbar befestigt, der sich mit der gegenüber der Scheibe relativen Winkelgeschwindigkeit ω dreht. Am Ende des Stabes befindet sich der Punkt P. Das körperfeste (x, y, z)-Koordinatensystem ist im Mittelpunkt A der Kreisscheibe fest mit dieser verbunden. P ωt r y x A B R Ω Gegeben: R, r, Ω, ω → Bestimmen Sie den Vektor der Absolutgeschwindigkeit − v P (t) sowie den Vektor der − → Absolutbeschleunigung a P (t) im (x, y, z)-Koordinatensystem. 2. Aufgabe (ca. 15 min) Eine Punktmasse (Masse m0 ) trifft mit der Geschwindigkeit v0 auf einen zunächst stehenden Wagen der Masse m1 . Nach dem vollplastischen Stoß rollt der Wagen reibungsfrei, wird aber durch eine masselose Feder (Federsteifigkeit c) abgebremst, über die er mit einem auf dem Boden liegenden Klotz der Masse m2 verbunden ist. Zwischen Klotz und Boden liegt der Haftreibungskoeffizient µH vor. Der Federweg soll lang genug sein, dass zu keinem Zeitpunkt Kontakt zwischen Wagen und Klotz auftritt. m0, v0 m1 c m2 µH g Gegeben: m0 , m1 , m2 , v0 , c, µH , g Bestimmen Sie 2.1 die Geschwindigkeit V1 des Wagens unmittelbar nach dem Stoß; 2.2 den maximalen Federweg xmax und die maximale Federkraft Fmax für den Fall, dass der Klotz m2 nicht gleitet; 2.3 die maximal erlaubte Geschwindigkeit v0max der Punktmasse vor dem Stoß, so dass der Klotz nicht zu gleiten beginnt. 3. Aufgabe (ca. 15 min) Gegeben ist das dargestellte schwingungsfähige System. Es besteht aus einem dünnen Kreisring (Radius R, Masse m), welcher über einen masselosen Steg AB im Punkt A drehbar gelagert ist, einer masselosen Feder (Federsteifigkeit c) und einem geschwindigkeitsproportionalen Dämpfer (Dämpfungskonstante k). Der Abstand zwischen Kreisringmittelpunkt und Lagerpunkt A beträgt e. Feder und Dämpfer sind ober- und unterhalb des Kreisringmittelpunktes mit dem Kreisring verbunden. Das System führt um die skizzierte statische Ruhelage Schwingungen kleiner Amplitude aus. c Gegeben: R, e, m, c, k, g m Bestimmen Sie e masselos ϕ A R g k B 3.1 mit Hilfe des d’Alembertschen Prinzips die SchwingungsDifferentialgleichung (Koordinate ϕ); 3.2 die Eigenkreisfrequenz ω des ungedämpften Systems, das Lehr’sche Dämpfungsmaß D sowie die Eigenkreisfrequenz ωD des gedämpften Systems. 4. Aufgabe (ca. 40 min) Betrachtet wird die im Punkt A drehbar aufgehängte Glocke bestehend aus einem Glockenkörper und einem Klöppel. Der Glockenkörper hat die Masse M und das Massenträgheitsmoment JS um seinen Schwerpunkt S, welcher im Abstand a unterhalb des Aufhängepunkts A liegt. Im Abstand b unterhalb des Aufhängepunkts A ist im Punkt B drehbar mit dem Glockenkörper der Klöppel verbunden. Dieser besteht aus einem als masselos anzunehmenden Stab der Länge c und einer an dessen Ende im Punkt C befindlichen Punktmasse m. Im Aufhängepunkt A ist das raumfeste kartesische Koordinatensystem (x, y, z) verankert. y b c x A α B masselos β a S C Klöppel (m) g Glocke ( M, JS ) Gegeben: m, M , JS , g, a, b, c Bestimmen Sie 4.1 die Anzahl der Freiheitsgrade des Systems sowie den Vektor der generalisierten Koordinaten; 4.2 die Ortsvektoren ~rS und ~rC im (x, y, z)-Koordinatensystem für den Schwerpunkt S des Glockenkörpers und die Punktmasse des Klöppels; 4.3 den Betrag |~vC | der Geschwindigkeit der Punktmasse; 4.4 die im System enthaltene kinetische Energie Ekin und potentielle Energie Epot (Epot (y = 0) = 0); 4.5 mit Hilfe der Lagrange’schen Gleichungen 2. Art eine der zur Beschreibung des Systems notwendigen Bewegungsgleichungen. (Wirklich nur eine!) Hinweis: cos(α ± β) = cos α cos β ∓ sin α sin β 5. Aufgabe (ca. 30 min) Der dargestellte vertikale Stab (Länge 2l, Dehnsteifigkeit EA) ist an beiden Enden fest eingespannt. Er wird durch eine vertikale Kraft, die im Mittelpunkt angreift, belastet. 1l l al 2l x̄ F l bl 3l y x Gegeben: l, EA, F 5.1 Bestimmen Sie mit dem Rayleigh-Ritz-Verfahren eine Näherung für den Verschiebungsverlauf ū(x̄) unter Verwendung der Ansatzfunktion ϕ1 (x̄) = (l2 − x̄2 ) bezüglich der gegebenen Koordinate x̄, und geben sie damit die Näherungslösung für die Verschiebung des Kraftangriffspunkts an. 5.2 Bestimmen Sie im Rahmen des Matrix-Verschiebungsgrößenverfahrens unter Verwendung der angegebenen Knoten- und Elementnummerierung die Gesamtsteifigkeitsformulierung für den Stab und damit die exakte Verschiebung des Kraftangriffspunkts.