Theoretischer Teil - antriebstechnik.fh
Werbung

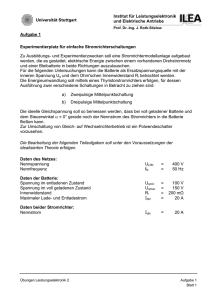
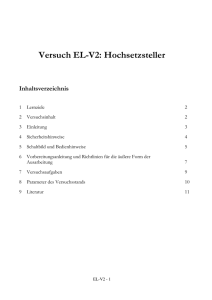
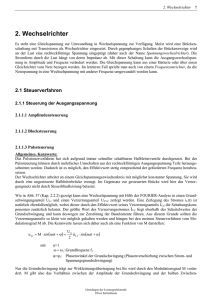
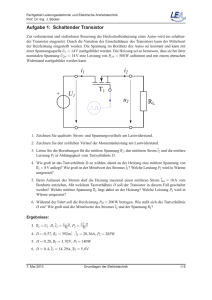
Leistungselektronik Versuch 4, Selbstgeführte Stromrichter 4.1 DC/DC-Wandler im Einquadrantenbetrieb 4.1.1 Allgemeines Die einfachsten Topologien eines DC/DC-Wandlers führen Ströme und Spannungen jeweils nur mit einem vorgegebenen Vorzeichen, d.h. im Einquadrantenbetrieb. Zu nennen sind in diesem Zusammenhang speziell der Hochsetzsteller und der Tiefsetzsteller. Sie können als Prototypen selbstgeführter Stromrichter angesehen werden. Schaltnetzteile - also sämtliche Spannungsversorgungen von Elektronikkomponenten - funktionieren zum Teil nach den im Folgenden diskutierten Funktionsprinzipien des Hoch- bzw. Tiefsetzstellers. Im Bereich höherer Leistungen werden diese DC/DC-Wandler dann für einen 4-Quadarntenbetrieb ergänzt für drehzahlgeregelte Antriebe mit Gleichstrommaschinen angewandt. In der Form bzw. mit der Topologie eines 4-Quadrantenstellers ist der DC/DC-Wandler auch nicht mehr von einem einphasigen Wechselrichter zu unterscheiden. Es handelt sich hier nur noch um eine Frage der Definition: Was ist noch eine variable Gleichspannung und was ist bereits eine Wechselspannung variabler Frequenz? Der Tiefsetzsteller bietet die einfachste Möglichkeit möglichst effizient eine Gleichspannung auf einen geringeren Wert zu reduzieren. Der Hochsetzsteller stellt das duale Pendant zum TSS dar: Er bietet die einfachste Möglichkeit einen Gleichstrom möglichst effizient im Wert zu reduzieren. Da elektrische Energiequellen meist durch Spannungsquellen repräsentiert werden, spricht man nicht von einem Strom-Tiefsetzsteller sondern von einem Spannungs-Hochsetzsteller (aufgrund der Leistungsinvarianz (Verluste vernachlässigt) der Stromrichter kann man bei einer Anpassung von Spannung oder Strom immer von einem reziproken Verhalten des jeweils zugehörigen Stroms bzw. der zugehörigen Spannung ausgehen). Abb. 1: Tief- und Hochsetzsteller als Schaltzellen mit Umschalter und mit Leistungshalbleitern realisiert (mit Ld -> ∞) Leistungselektronik In Abbildung 1 sind die Grundlegenden Schaltungen mit idealen Umschaltern gezeigt. Sie speisen jeweils eine ohmsch-induktive bzw. ohmsch-kapazitive Last. Da die Schalter dieser Stromrichter sehr schnell im Vergleich zu den jeweiligen Zeitkonstanten (τL = L/RL bzw. τL = RLC) hin- und herschalten, können die eigentlich passiven Lasten während der Schalthandlungen als konstante Strom- bzw. Spannungsquellen angesehen werden. Der TSS schaltet als eine konstante Spannung „portionsweise“ auf eine ohmsch-ind. Last bzw. eine – für den jeweiligen Zeitbereich – konstante Stromquelle. Der HSS wiederum einen konstanten Strom „portionsweise“ auf eine ohmsch-kap. Last bzw. auf eine – für den jeweiligen Zeitbereich – konstante Spannungsquelle. Es ist hier schon zu erahnen, dass für einen rückspeisefähigen DC/DC-Wandler nun jeweils einer dieser beiden Stromrichter benötigt wird Einen TSS für den Leistungstransfer von Spannungsquelle (bzw. hohem Spannungsniveau) zu Stromquelle (bzw. niedrigem Spannungsniveau) und einen HSS für die Gegenrichtung. Die Schalter sind als Umschalter realisiert, da sich immer auf der einen oder anderen Seite der Schaltung eine ohmsch-induktive Last und/oder eine Stromquelle befindet die stets einen Strompfad erfordert. Wird dieser nicht gewährleistet, hat dies eine Bauteilzerstörung aufgrund von Überspannungen und schließlich Durchschlag zur Folge. Die Zeitverläufe von Strom und Spannung am Ausgang uL, iL der jeweiligen Schaltung sind im Falle einer resistiven Last proportional zueinander und können für beide Schaltungen gemäß Gleichung (1) und (2) jeweils abschnittsweise für den Tiefsetzsteller bzw. Hochsetzsteller bestimmt werden. Mit der Normierung der Lastströme und –spannungen (3) kann unter der Annahme von gleichen Zeitkonstanten (4) ein normierter Zeitverlauf für die Ausgangsgrößen gemäß Abb. 2 gefunden werden. Tiefsetzsteller: L L −t −t RL RL U 0 1 − e + u (nT )e für nT < t < (nT + TE ) L u L (t ) = L −t u L (nT + TE )e RL für (nT + TE ) < t < ((n + 1)T ) (1) Hochsetzsteller: t t − − CRL CRL RL I 0 1 − e + u (nT )e für nT < t < (nT + TE ) L u L (t ) = t − u L (nT + TE )e CRL für (nT + TE ) < t < ((n + 1)T ) (2) Normierung und Annahme gleicher Zeitkonstanten (Beispiel!): x L (t ) = u L iL = U0 I0 τ L = CRL = L ⇒ RL = RL (3) L C (4) Leistungselektronik Abb. 2: Normierter Zeitverlauf der Ausgangsspannungen und –ströme für Hoch- und Tiefsetzsteller bei gleicher Lastzeitkonstante Für einen periodischen Schaltzyklus mit der Periodendauer T meint TE die Schaltphase, in der der Umschalter den oberen Schaltzustand einnimmt und TA = T - TE die Phase, in der er die untere Stellung einnimmt. Für den TSS entspricht TE der Ansteuerungsphase für den korrespondierenden Leistungshalbleiter, bei dem HSS ist es TA. In dem hier gezeigten Fall sind Strom und Spannung nach dem Einschalten stets größer null. Die jeweilige elektrische Ausgangsgröße „lückt“ also nicht. Unter einem lückenden Zeitverlauf versteht man den Fall, dass die jeweilige elektrische Größe periodisch null wird. Der Maximalwert der jeweiligen elektrischen Ausgangsgröße kann mit (5) berechnet werden, der Mittelwert wird mit (6) abgeschätzt, wobei die Randbedingung (7) für die meisten selbstgeführten Stromrichter zutrifft, womit (6) zu hinreichend genauen Ergebnisse führt. Es können für diesen Fall auch die vereinfachten Ersatzschaltbilder aus Abbildung 3 gefunden werden. Dies bedeutet, dass mit (7) für den zumeist betrachteten stationären Zustand der Schaltung ein jeweiliger Gradenverlauf angenommen werden kann. Diese Näherung erleichtert die analytische Behandlung dieser Stromrichterschaltungen enorm, wie noch zu sehen sein wird. Maximaler normierter Ausgangswert (im stat. Zustand): xL max = 1− e 1− e − − TE τL T (5) τL Mittlerer normierter Ausgangswert (im stat. Zustand): TE T für den Fall, dass: τ L >> T xL = (6) (7) Leistungselektronik Abb. 3: Vereinfachung der Schaltungen aus Abb. 1 mit der Bedingung τL >> T Tiefsetzsteller Hochsetzsteller U L = xU 0 U L = x RL I 0 4.1.2 Steuerung Tiefsetzsteller Für die folgenden Betrachtungen wird die Lastspannung UL ebenso wie die Eingangspannung Ue = U0 als konstant angenommen. Für nicht lückenden Betrieb des Laststroms iL kann dann für den stationären Betrieb (Mittelwert des Laststroms ändert sich nicht) ein fester Bezug zwischen Ein- und Ausgangsspannung sowie der Einschaltzeit des Halbleiterschalters V1 in Bezug auf die Schaltperiode T gefunden werden (8). Dabei ist a der Aussteuerungsgrad (englisch duty cycle, D). Aussteuerungsgrad für nicht lückenden Betrieb TE U =a= L T Ue (8) Weicht der Aussteuerungsgrad a von diesem Wert ab (bei konstanten Spannungsquellen Ue und Ua), so wird für sinkende Werte von a immer noch ein stationärer Zustand erreicht, allerdings bei lückendem Strom. Für steigende Werte von a ist ein stetig steigender Laststrom die Folge (woraus sich allerdings bei einem realen Aufbau wiederum eine Anpassungen der Lastspannung UL ergibt). In Abbildung 4 sind die Laststromverläufe des TSS für a < UL/Ue, a = UL/Ue sowie a > UL/Ue angegeben. Für den Fall lückenden Laststroms kann der Mittelwert (10) sowie der Effektivwert (11) des Laststroms als Funktion der hier angegeben Parameter mit ermittelt werden. Bei nicht lückendem Strom kann lediglich eine Aussage über den Wechselanteil des Laststroms (12) gemacht werden. Leistungselektronik Abb. 4: Laststromverläufe bei konstantem Verhältnis UL/Ue und variablem Aussteuerungsgrad a Stromschwankungsbreite des Laststroms: ∆i L = (U e − U L ) aT L (9) Mittelwert des Laststroms, lückend: i L ,lück Ue a 2T = Ue − 1 U L 2L (10) Effektivwert des Laststroms, lückend: aT U e ~ I L ,lück = (U e − U L ) L UL (11) Effektivwert des Wechselanteils im Laststrom, nicht lückend: aT ~ I L ~ = (U e − U L ) 3L (12) 4.1.3 Steuerung Hochsetzsteller Für die folgenden Ausführungen zum HSS wird wiederum die Lastspannung UL ebenso wie die Eingangspannung Ue jeweils als konstant angenommen. Außerdem habe nun die Induktivität Ld entgegen der Annahmen aus 4.1.1 einen endlichen Wert. Für nicht lückenden Betrieb des Eingangsstroms ie kann im Fall eines stationären Betriebs (Mittelwert des Eingangsstroms ändert sich nicht) ein fester Bezug zwischen Ein- und Ausgangsspannung sowie des Aussteuerungsgrades des Halbleiterschalters V1 gefunden werden (13). Leistungselektronik Aussteuerungsgrad für nicht lückenden Betrieb TE U = a =1− e T UL (13) Auch beim HSS resultiert wie zuvor beim TSS für sinkende Werte von a ein stationärer Zustand bei lückendem Drosselstrom (hier allerdings lückender Eingangsstrom ie). Für steigende Werte des Aussteuerungsgrades folgt auch hier ein stetig steigender Drosselstrom ie, siehe auch Abb. 5. Die korrespondierenden Kenngrößen sind mit (14) – (17) angegeben. Stromschwankungsbreite des Eingangsstroms: ∆i e = U e aT L (14) Mittelwert des Eingangsstroms, lückend: ie ,lück = U eU L a 2T U e − U L 2L (15) Effektivwert des Eingangsstroms, lückend: aT ~ I e ,lück = U e L aU L 3 (U L − U e ) (16) Effektivwert des Wechselanteils im Eingangsstrom, nicht lückend: aT ~ I e ~= U e 3L (17) Abb. 4: Eingangsstromverläufe bei konstantem Verhältnis Ue/UL und variablem Aussteuerungsgrad a Leistungselektronik 4.1.4 Zusätzliche Berechnungsvorschriften Bisher wurden lediglich der Laststrom für den TSS sowie der Eingangsstrom für den Hochsetzsteller angesprochen. Mittel- und Effektivwerte der jeweils noch fehlenden Eingangs- bzw. Ausgangsströme stellen ebenso wesentliche Kenngröße dar. Sie können allerdings aus den bereits bestimmten Größen konstruiert werden, da sie entweder zeitweise mit den bereits bestimmten Stromverläufen identisch oder null sind. Dies ist in Abb. 5 exemplarisch für TSS wie HSS im Fall von stationär nicht lückenden Drosselströmen zu sehen. D.h. die Berechnung der jeweiligen Mittel- und Effektivwerte beschränkt sich auf die Bestimmung dieser Kennwerte für trapezförmige Zeitverläufe (18) - (21), wobei die Parameter i1 und i2 mit den oben angeführten Ausdrücken bereits bestimmt werden können (mit i1,2 = ī ± ∆i/2). Mittelwert des Eingangsstroms beim TSS ie = a i1 + i2 2 (18) Mittelwert des Ausgangsstroms beim HSS ie = (1 − a ) i1 + i2 2 (19) Effektivwert des Eingangsstroms beim TSS ( a 2 ~ 2 Ie = i1 + i1i2 + i2 3 ) (20) Effektivwert des Ausgangsstroms beim HSS ( 1− a 2 ~ 2 Ie = i1 + i1i2 + i2 3 ) (21) Abb. 5: Links: Eingangsstromverlauf beim TSS, rechts: Ausgangsstromverlauf beim HSS jeweils bei nicht lückendem Drosselstrom Leistungselektronik 4.2 Ergänzung der Schaltungen für 2Q- bzw. 4Q-Betrieb 4.2.1 Konstruktion von 2Q-DC/DC-Wandlern und deren Ansteuerung Durch geschickte Ergänzung der bisher gezeigten grundlegenden Schaltungen mit nur zwei weiteren Leistungshalbleitern ist nun jeweils für die resultierenden Stromrichter ein Betrieb in zwei Quadranten der Ausgangsgrößen-Kennlinienebene (ua(ia)) möglich. Die Ansteuerung der Leistungshalbleiter und die Definition des Aussteuerungsgrades muss hierbei mitunter angepasst werden. Es wird im Folgenden immer davon ausgegangen, dass der Betrag der Eingangsspannung größer sei als jener der Last- bzw. Ausgangsspannung |Ue| > |ûa|, damit eine Steuerbarkeit der Schaltung erhalten bleibt. In Tabelle 1 sind die jeweiligen Schaltungen zusammen mit den ihnen zugänglichen Quadranten der Ausgangskennlinienebene gezeigt. Es sind für die Einzelnen Schaltungen zudem die angesteuerten Leistungshalbleiter für den jeweiligen Leistungsfluss kenntlich gemacht. In den Fällen, bei denen jeweils zwei Halbleiterschalter als anzusteuernde Bauteile gekennzeichnet sind, wird von einer synchronen Ansteuerung der Bauteile ausgegangen, d.h. die korrespondierende Einschaltphase TE sowie der Aussteuerungsgrad a bezieht sich auf beide Bauteile gleichzeitig. In den Fällen, für die zwei Schaltungen in einer Zeile angegeben sind, heißt dies, dass entweder die eine oder die andere Möglichkeit der Ventilansteuerung gleichberechtigt zum gewünschten Leistungsfluss führt. Mögliche Quadranten a b Angesteuerte LHL-Schalter für jeweiligen Leistungsfluss P von Ue -> Ua (TSS-Betrieb) P von Ua -> Ue (HSS-Betrieb) Leistungselektronik c d Tab. 1: Mögliche Schaltungskombinationen für 2Q-DC/DC-Wandler 4.2.2 Konstruktion eines 4Q-DC/DC-Wandlers sowie dessen Ansteuerung Es ist nun auch möglich einen Stromrichter für alle vier Quadranten der Ausgangskennlinienebene zu konstruieren, siehe Abb. 6. Es ist allerdings bei einem solchen Stromrichter nicht mehr sinnvoll die Ansteuerung der Ventile mit einem Aussteuerungsgrad a zu beschreiben. In Tabelle 2 sind sämtliche mögliche Kombinationen von geschlossenen Ventilen und die dazu gehörigen Werte für die Ausgangsspannung ua gezeigt. Es ist sofort klar, dass die Schaltkombinationen, bei denen beide Leistungshalbleiter einer Halbbrücke geschaltet werden, verboten sind, da sie zu einem Kurzschluss der Eingangsspannung führen würden. Nach welchem Prinzip und in welcher Abfolge die hier gezeigten Schaltkombinationen angewandt werden, wird im nächsten Abschnitt geklärt. Abb. 6: Selbstgeführter 4-Qudaranten-Stromrichter Leistungselektronik Eingeschaltete Halbleiterschalter Schaltzustand in vereinfachter Schaltung mit Umschaltern Resultierender Momentanwert der Ausgangsspannung ua V1, V4 Ue V1, V3 0 V2, V4 0 V2, V3 -Ue Tab. 2: Mögliche Schaltungskombinationen (eingeschaltete Halbleiterschalter) des 4Q-Stellers Leistungselektronik 4.3 Pulsweitenmodulation eines 4Q-DC/DC-Wandlers bzw. einphasigen Wechselrichters Aus Tabelle 2 wird ersichtlich, dass die Ausgangsspannung ua insgesamt lediglich drei verschiedene Momentanwerte abhängig von den Schalterzuständen S1 sowie S2 annehmen kann. Sieht man den zeitabhängigen Schaltzustand der beiden Umschalter S1 und S1 als Funktion mit der Zeit s1(t) und s2(t), die lediglich die diskreten Werte 1 und -1 annehmen können, so kann der Mittelwert der Ausgangsspannung ua über eine Schalt- oder auch Trägerperiodendauer TC (Index C für Carrier = Träger) wie folgt geschrieben werden (22). ua = Ua = Ue 2TC ∫ (s (t ) − s TC 1 2 (t ) )dt (22) Anhand von Gleichung (22) wird ersichtlich, dass man mit dieser Stromrichterschaltung nun nicht mehr nur reine Gleichspannungen sondern auch Spannungsverläufe mit einem Wechselspannungsanteil darstellen kann. Die Ermittlung der entsprechenden Schaltpulse für einen gewünschten Gleichspannungs- oder auch Wechselspannungsverlauf erfolgt mittels einer so genannten Pulsweitenmodulation, PWM. Bei der Pulsweitenmodulation wird eine Modulationsfunktion m(t) (Wertebereich: m(t) = -1..1) mit einer Trägerfunktionen cn(t) = -1..1 verglichen. Die Modulationsfunktion m(t) ist für den Fall, dass der Stromrichter als 4Q-DC/DC-Wandler genutzt wird, ein konstanter Parameter, solange der Betriebspunkt nicht geändert wird. Für Wechselrichterbetrieb ist m(t) meist eine Sinusfunktion - gelegentlich auch eine Rechteckfunktion - variabler Frequenz f g. Die Trägerfunktion ist allgemein eine Dreieckfunktion mit beliebiger Flankensteilheit. Sie kommt normalerweise entweder als reiner Sägezahn fallender oder steigender Flanke oder als symmetrisches Dreieck vor. Gleichungen (23) – (25) zeigen drei verschiedene Modulationsfunktionen. Hier ist der Parameter M der Modulationsgrad, der zunächst auf den Wertebereich M = 0..1 begrenzt bleiben soll. Es stellt sich heraus, dass für den Grenzwert fC = 1/TC → ∞ der Ausdruck (26) gefunden werden kann. Meist reicht für diese Annahme bereits die Bedingung, dass die Trägerfrequenz sehr viel höher als die zu stellende Grundschwingungsfrequenz fg = 1/Tg am Ausgang sein soll fC >> fg für ausreichend genaue Ergebnisse aus. Modulationsfunktion für DC/DC-Wandler-Betrieb m(t ) = M (23) Rechteck-Modulationsfunktion Tg M für 0 ≤ t < 2 m(t ) = − M für TC ≤ t < T g 2 (24) Leistungselektronik Sinus-Modulationsfunktion m(t ) = M sin(ω g t ) (25) Zusammenhang Modulationsfunktion und Schaltfunktionen m(t ) = 1 2TT ∫ (s (t ) − s TC 1 2 (t ) )dt (26) Bei der einfachen PWM wird die Modulationsfunktion m(t) mit nur einem Träger c(t) verglichen. Sollte der Momentanwert der Modulationsfunktion m(t) größer sein als der der Trägerfunktion c(t) so gilt s1(t) = 1 und s2(t) = -1 sowie umgekehrt (27). Bei der einfachen PWM nimmt die Ausgangsspannung ua nur zwei mögliche Momentanwerte an, wie in Abb. 7 gut zu sehen ist. Hinsichtlich des resultierenden Oberschwingungsgehaltes im Ausgangsstrom wäre es allerdings wünschenswert auch den dritten Momentanwert 0 für die Ausgangsspannung zu nutzen. Dies ist möglich mit der Einführung eines zweiten Trägers, der die gleiche Form, wie der erste besitzt, allerdings in seiner Grundschwingungsperiode um den Winkel γ = π zur ersten Trägerfunktion verschoben ist. Nun hat jede Halbbrücke des Stromrichters quasi eine Trägerfunktion bekommen und sie werden nun unabhängig voneinander und nicht mehr komplementär geschaltet. Wenn nun nämlich die Modulationsfunktion m(t) größer ist als c1(t), so wird s1(t) = 1 und im umgekehrten Fall s1(t) = -1. Das invertierte Prinzip wird mit dem Vergleich von m(t) zu c2(t) und s2(t) angewandt, (28). Die genaue Phasenverschiebung von γ = π zwischen den beiden Trägerfunktionen sorgt dabei dafür, dass die Ausgangsspannung ua abhängig vom Vorzeichen des Momentanwertes der Modulationsfunktion m(t) einen nur noch unipolaren Verlauf hat, wie in Abb. 8 zu sehen ist. Werte der Schaltfunktionen für einfache PWM (mit einem Träger) 1 s1 (t ) = − 1 − 1 s 2 (t ) = 1 für m (t ) > c (t ) für 1 für m (t ) < c (t ) für m (t ) > c (t ) (27) für 1 für m (t ) < c (t ) Werte der Schaltfunktionen für PWM mit zwei Trägern 1 s1 (t ) = − 1 − 1 s 2 (t ) = 1 für m (t ) > c1 (t ) für 1 für m (t ) < c1 (t ) für m (t ) > c2 (t ) für 1 für m (t ) < c2 (t ) (28) Leistungselektronik M(t) c(t) s1(t) s2(t) ua(t)/Ue ia(t) ie(t) Abb 7: „Einfache“ Pulsweitenmodulation mit einem Träger M(t) c(t) s1(t) s2(t) ua(t)/Ue ia(t) ie(t) Abb 8: Pulsweitenmodulation mit zwei Trägern Leistungselektronik 4.4 Berechnung von Kenngrößen eines 4Q-DC/DC-Wandlers bzw. einphasigen Wechselrichters Anhand der Abbildungen 7 und 8 kann man unschwer erkennen, dass die Ausgangsspannung – wenngleich im Verlauf des gleitenden Mittelwertes der Modulationsfunktion vergleichbar – einen sehr starken hochfrequenten Wechselanteil besitzt. Dies macht sich auch in einem vom Grundschwingungseffektivwert stark abweichenden Gesamteffektivwert bemerkbar. Darüber hinaus sorgt das periodische Umschalten der Schalter S1 und S2 (eigentlich sind es die Ventile V1 – V4, die geschaltet werden) dafür, dass der Eingangsstrom ständig zwischen den Werten +ia, 0 und -ia umgeschaltet wird. Er nimmt also - abhängig vom Modulationsverfahren abschnittsweise den Momentanwert des Ausgangsstroms mit pos. bzw. neg. Vorzeichen oder aber den Wert 0 an. Der Gleichanteil des Eingangsstroms lässt sich relativ einfach über die Leistungsbilanz ermitteln, aber auch der Effektivwert des Eingangsstroms soll hier noch ermittelt werden, da er ein Maß für die Verluste im Zwischenkreis darstellt. PWM-Verfahren Ein Träger Zwei Träger mit γ = π Kenngröße (Modulationsfunktion) Mittelwert, (Gleichspannungswandlung) Grundschwingungseffektivwert (Rechteck) Grundschwingungseffektivwert (Sinus) u a = MU e 2 2 ~ Ua = MU e 1 π M ~ Ua = Ue 2 1 u a = MU e 2 2 ~ Ua = MU e 1 π M ~ Ua = Ue 2 1 Gesamteffektivwert (Gleichspannungswandlung) Gesamteffektivwert (Rechteck) ~ U a = Ue ~ Ua = Ue M ~ U a = Ue ~ Ua = Ue M Gesamteffektivwert (Sinus) ~ U a = Ue 2 ~ U a = Ue M Tab 3: Kennwerte der Ausgangsspannung π Leistungselektronik Kenngröße (Modulationsfunktion) Gleichanteil (Gleichspannungswandlung) Gleichanteil (Sinus) Ein Träger PWM-Verfahren Zwei Träger mit γ = π i e = iˆa M = i a M ie = iˆa M cos ϕ a 2 i e = iˆa M = i a M ie = iˆa M cos ϕ a 2 Effektivwert (Gleichspannungswandlung) ~ I e = iˆa = ia ~ I e = M iˆa = M ia Effektivwert (Sinus) iˆ ~ Ie = a 2 M cos(2ϕ a ) ~ I e = iˆa 1 + 3 π Tab 4: Kennwerte des Eingangs- bzw. Zwischenkreisstroms (Rechteckmodulation ausgeschlossen, da der entsprechende Ausgangsstromverlauf nicht ohne weiteres anzugeben ist)