Bauteil- und Schaltungsbemessung - antriebstechnik.fh
Werbung

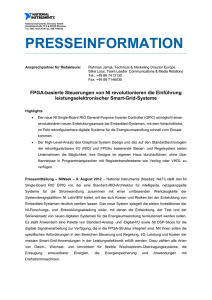
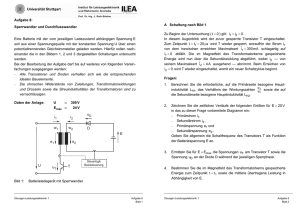
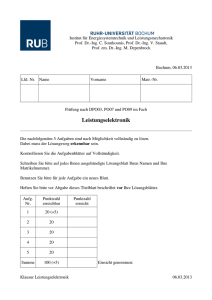
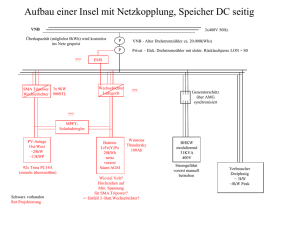
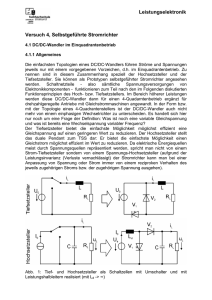
2. Wechselrichter 1 2. Wechselrichter Es steht eine Gleichspannung zur Umwandlung in Wechselspannung zur Verfügung. Meist wird eine Brückenschaltung mit Transistoren als Wechselrichter eingesetzt. Durch gegenphasiges Schalten der Brückenzweige wird an der Last eine rechteckförmige Spannung eingeprägt (daher auch der Name Spannungswechselrichter). Die Stromform durch die Last hängt von deren Impedanz ab. Mit dieser Schaltung kann die Ausgangswechselspannung in Amplitude und Frequenz verändert werden. Die Gleichspannung kann aus einer Batterie oder über einen Gleichrichter vom Netz bezogen werden. Im letzteren Fall spricht man auch von einem Frequenzumrichter, da die Netzspannung in eine Wechselspannung mit anderer Frequenz umgewandelt werden kann. 2.1 Steuerverfahren 2.1.1 Steuerung der Ausgangsspannung 2.1.1.1 Amplitudensteuerung 2.1.1.2 Blocksteuerung 2.1.1.3 Pulssteuerung Allgemeines, Kennwerte: Das Pulssteuerverfahren hat sich aufgrund immer schneller schaltbaren Halbleiterventile durchgesetzt. Bei der Pulssteuerung können durch mehrfaches Umschalten aus der rechteckförmigen Ausgangsspannung Teile herausgeschnitten werden. Dadurch ist es möglich, den Effektivwert stetig entsprechend der geforderten Frequenz herabzusetzen. Der Wechselrichter arbeitet an einem Gleichspannungszwischenkreis mit möglichst konstanter Spannung. Sie wird durch eine ungesteuerte Halbleiterbrücke erzeugt. Im Gegensatz zur gesteuerten Brücke wird hier das Versorgungsnetz nicht durch Steuerblindleistung belastet. Wie in Abb. 57 (Kap. 2.2.2) gezeigt kann eine Wechselspannung mit Hilfe der FOURIER-Analyse in einen Grundschwingungsanteil UL1 und einen Verzerrungsanteil ULVZ zerlegt werden. Eine Zerlegung des Stromes iL(t) ist natürlich ebenfallsmöglich, wobei dieser durch den Effektivwert seines Verzerrungsanteils IVZ die Schaltungskomponenten zusätzlich belastet. Der größte Wert des Verzerrungsstromes ÎVZ liegt oberhalb des Scheitelwertes der Grundschwingung und kann deswegen zur Zerstörung der Bauelemente führen. Aus diesem Grunde sollten die Verzerrungsanteile so klein wie möglich gehalten werden und hängen bei den meisten Steuerverfahren vom Modulationsgrad M ab. Die Kennwerte lassen sich daher auch als eine Funktion von M darstellen: u L1 = M ⋅ sin(nωt + ϕ ) = mit Uq 2 ˆu L1 ⋅ sin (nωt + ϕ ) n=1 ω = ω1 :Grundfrequenz f1 ϕ=ϕ1: Phasenwinkel der Grundschwingung (Phasenverschiebung zwischen Strom- und Spannungsgrundschwingung) Nur die Grundschwingung trägt zur Wirkleistungsübertragung bei.Sie wird durch den Modulationsgrad M verändert. M gibt also das Verhältnis zwischen der Amplitude der Grundschwingung und der halben Zwischen- Grundlagen der Leistungselektronik Oliver Kettenbaum 2 Bauteil- und Schaltungsbemessung kreisspannung wieder und liegt im Bereich 0≤M≤4/π. Die max. Amplitude der Grundschwingung kann also um den Faktor 4/π über der Gleichspannung Uq liegen. ˆu L1,max = 4 U q = 1.27 U q π Der Aussteuerungsgrad (Tastverhältnis) A liegt dagegen im Bereich 0≤A≤1: A= 4 M = 1.27 M π Das Gesamtsignal, welches aus Grundschwingung und Verzerrungsanteil gebildet wird, wird durch die Effektivwerte UL und IL angegeben. Der Oberschwingungsgehalt k (siehe auch Kap. 1.4) gibt die Abweichung von der idealen Sinusform an: kU = U 2L 2 + U 2L3 + ... U 2L1 + U 2L 2 + U 2L 3 + ... = U LVZ UL Die Schaltfrequenz fS gibt die Schaltzyklen pro Schalter und Zeiteinheit wieder. Diese besteht aus je einem Einund Ausschaltvorgang und die Schaltzahl q ist die auf die Grundfrequenz bezogene Schaltfrequenz: q= fS f1 mit f S = 1 te + ta Abb. 1: Prinzip der Pulssteuerung (synchrone Schaltfunktion). Dargestellt sind die gepulste Ausgangsspannung uL sowie deren Grundschwingung (1. Harmonsiche uL1). Varianten der Pulssteuerung: Pulssteuerung ist ein synchrones Steuerverfahren, da die Grundperioden der Schaltfunktion identisch sind (siehe Abb. _____). Folgende Symmetrien sind denkbar: Halbperiodensymmetrie: Die Schaltfunktion setzt sich aus zwei identischen Halbperioden zusammen, die zueinander invertiert sind. Es treten nur ungeradzahlige Harmonische auf – ein Gleichanteil ist nicht vorhanden. Viertelperiodensymmetrie: Alle Teilschwingungen der FOURIER-Reihe haben entweder die gleiche Phasenlage wie die Grundschwingung oder sind zu dieser gegenphasig. Eigenschaften der Pulssteuerung: Schaltfrequenz fS ist ein ganzzahliges Vielfaches der Grundfrequenz f1 Schaltzahl q ist ganzzahlig FOURIER-Analyse ergibt ein diskretes Linienspektrum mit ganzzahligen Werten Die synchrone Schaltfunktion kann innerhalb einer Periode T Symmetrien aufweisen (siehe oben) Generell sollte man eine Viertelperiodensymmetrie anstreben, da hier die Ausgangsspannung uL mit sinusförmigen Sollwert einen minimalen Oberschwingungsgehalt aufweist. Grundlagen der Leistungselektronik Oliver Kettenbaum 2. Wechselrichter 3 2.1.1.4 Zweipunkt-Stromregelung Asynchrone Steuerverfahren haben keine symmetrische Schaltfunktion – die Grundschwingung unterscheidet sich jedoch nicht von der synchroner Verfahren. Der Verzerrungsanteil ist periodisch. Folglich bildet sich das Frequenzspektrum nicht mehr nur aus ganzzahligen Harmonischen, sondern es entsteht ein verdichtetes Linienspektrum (Subharmonische). Dies sind die Eigenschaften der Zweipunkt-Stromregelung. B2-Brücke Der Laststrom iL wird in einem Toleranzband mit der Breite 2∆i geschaltet, welches symmetrisch um einen sinusförmigen Sollwert iL,soll liegt. Ein Komparator schaltet die Ventile um, sobald der Strom iL,ist die Toleranzgrenze erreicht. Die Differenz zwischen Soll- und Istwert entspricht dem Verzerrungsanteil des Stromes, der auch Abweichungen der Grundschwingung mit einschließt. Die Grundschwingung der Ausgangsspannung stellt sich den Lastverhältnissen (meist RL-Kombination) nach Betrag und Phase entsprechend ein. B6-Brücke 2.1.2 Steuerung der Ausgangsfrequenz Abb. 2: Pulsverfahren mit Zweipunktsteuerung und Zweipunktregelung des Stromes eine Vormagnetisierungs der Spule (z.B. Anker) nachsich zieht. 2.1.3 Steuerung des Brückenzweiges 2.1.3.1 Blocksteuerung 2.1.3.2 Dreieck-Rechteck-Modulation (∆− ∆− −Modulation) Bei Frequenzverhältnissen von q= fS ≤9 f1 mit f S = 1 te + ta Grundlagen der Leistungselektronik Oliver Kettenbaum Veränderung der Schaltzeiten laut Schalterdiagramm. Gleiche Schaltzeiten für beide Halbperioden sind notwendig, da sich sonst ein Gleichanteil bildet der 4 Bauteil- und Schaltungsbemessung 2.1.3.3 Dreieck-Sinus-Modulation (∆− ∆− ∼ −Modulation) 2.2 Einphasige, selbstgeführte Wechselrichter 2.2.1 M1-Schaltung 2.2.2 B2-Schaltung (W2C) Die W2C-Schaltung setzt sich aus zwei M1Schaltungen zusammen. Dabei werden abwechselnd die diagonal liegenden Schalter T1-T4 bzw. T3-T2 geschaltet und so die Versorgungsgleichspannung Uq mit wechselnder Polarität an die Last übergeben. Als Schalter kommen alle ein- und ausschaltbaren Bauelemente infrage (z.B. BJT, MOSFET, IGBT, GTO und Thyristoren mit Ausschaltkreis). Zwischen den Steuerimpulsen für die Schalter T1 und T3 (bzw. T2 und T4) ist eine Totzeit tT notwendig, Abb. 3: Einphasen-Wechselrichter in Brückenschaltung (W2C) damit kein Kurzschluß bei ungleich schnell schaltenden Bauelementen entstehen kann. Damit ist die Betriebs- bzw. Schaltfrequenz eingeschränkt. Allerdings erzeugen hohe Betriebsfrequenzen hohe Schaltverluste1. Bei induktiver Last hat der Strom nach dem Umschalten der Spannung einen exponentiell ansteigenden (bzw. abfallenden) Verlauf. Daher sind für die Zeit nach der Spannungsumkehr Dioden notwendig, die den Strom solange führen, bis auch dieser seine Richtung umgekehrt hat. In dieser Phase wird Energie in den Gleichstromkreis zurückgespeist (daher auch Rückspeisedioden). Die Gleichspannung Uq wird durch den Zwischenkreiskondenstor C möglichst konstant gehalten. Der Verlauf der Ausgangsspannung des Wechselrichters uL bleibt (nichtlückender Betrieb vorausgesetzt, unabhängig von der Last. Der Ausgangsstrom iL und somit auch der Oberschwingungsgehalt wird wesentlich von dem Charakter der Last beeinflußt. 1 In der Praxis bestimmen die thermischen Verluste die maximale Betriebsfrequenz Grundlagen der Leistungselektronik Oliver Kettenbaum 2. Wechselrichter 5 Abb. 4: Strom- und Spannungsverlauf eines selbstgeführten Wechselrichters in Brückschaltung mit ohmscher und induktiver Last. Hier wurde ein Tastverhältnis TV (Aussteuergrad) von TV=0.5 gewählt. 2.3 Dreiphasen-Wechselrichter (W6C) Soll ein Drehstromverbraucher aus einer konst. Gleichspannungsquelle Uq versorgt werden, so wird ein Wechselrichter mit 3 Phasen UVW benötigt. Die B6Brücke wird über einen Zwischenkreis mit ausreichend großem Glättungskondensator (Uq=konst.) gespeist. Zu jedem Schalter (Ventil) liegt wieder antiparallel eine Diode, die der Abb. 5: Dreiphasiger Wechselrichter Energierückspeisung aus den Speicherelementen (Induktivitäten) dienen. Grundlagen der Leistungselektronik Oliver Kettenbaum 6 Bauteil- und Schaltungsbemessung Eigenschaften: Nur ungeradzahlige Harmonische Zusätzlich verschwinden alle durch 3 teilbaren Harmonischen Die graphische Konstruktion der verketteten Spannungen (Außenleiter-Spannungen) UUV, UVW, UWU aus den Strangspannungen UUN, UVN, UWN zeigt Abb. ____ U UV = U UN − U VN U VW = U VN − U WN Abb. 6: Konstruktion der verketteten Spannungen (Außenleiter-Spannungen). U WU = U WN − U UN 2.3.1 Blocksteuerung (λ λ=120°) 2.3.2 Blocksteuerung (λ λ=180°) Abb. 7: Grundlagen der Leistungselektronik Oliver Kettenbaum 1. Thermische Eigenschaften A. Bauteil- und Schaltungsbemessung 1. Thermische Eigenschaften 1.2 Konstruktion und Aufbau 1.3 Thermisches Verhalten 1.4 Überspannungs- und Überstromschutz Grundlagen der Leistungselektronik Oliver Kettenbaum 7 8 F. Elektrische Fahrantriebe F. Elektrische Fahrantriebe 1. Anforderungen 2. Energiespeicher 2.1 Konventionelle Energiespeicher 2.2 Hochtemperatur-Systeme 2.3 Brennstoffzelle 2.4 Ladeeinrichtungen Grundlagen der Leistungselektronik Oliver Kettenbaum 3. Permanenterregte Synchronmaschine 3. Permanenterregte Synchronmaschine 3.1 Wirkprinzip 3.2 Steuerprinzip 3.3 Vereinfachtes Steuerverfahren 4. Asynchronmaschine 4.1 Wirkprinzip 4.2 Steuerprinzip für konst. Rotorflußverkettung Grundlagen der Leistungselektronik Oliver Kettenbaum 9 10 G. Literaturverzeichnis G. Literaturverzeichnis [1] K.-H. Löcherer: „Halbleiterbauelemente“, B.G. Teubner Verlag Stuttgart, 1992 [2] Tietze, Schenk: „Halbleiter-Schaltungstechnik“, Springer-Verlag, 199911 [3] Horowitz, Hill: „The art of electronics“, Cambridge university press, 1996 [4] E. Böhmer: „Elemente der angewandten Elektronik“, Vieweg-Verlag,199811 [5] G. Hagmann: „Leistungselektronik – Grundlagen und Anwendungen“, Aula-Verlag, 1993 [6] M. Michl: „Leistungselektronik“, Springer-Verlag, 1992 [7] W. Stephan: „Leistungselektronik interaktiv“, Fachbuchverlag Leipzig, 2001 [8] R. Lappe, H. Conrad, M. Kronberg: „Leistungselektronik“, Springer-Verlag, 1988 [9] K. Fuest, P. Döring: „Elektrische Maschinen und Antriebe“, Vieweg-Verlag, 19994 [10] B. Arlt: „Der Leistungsschalter der Zukunft“, elektronik 25/1995, S. 144ff, franzis-Verlag [11] D. Nührmann: „Power-MOS-FETs“, franzis-Verlag, 1993 [12] Siemens: „Halbleiter“, Siemens AG, 1990 [13] O. Kettenbaum: „Skriptum Grundlagen der Elektrotechnik“, 1995-2001 [14] Prof. Dr. habil. M. Schulze: „Leistungselektronik“, Vorlesungsmitschrift 2000/2001, FH Zwickau [15] Prof. Nebl: „Elektronische Bauelemente“, Skript WS97/98, FH Regensburg Grundlagen der Leistungselektronik Oliver Kettenbaum 4. Asynchronmaschine H. Index Grundlagen der Leistungselektronik Oliver Kettenbaum 11