Stellglieder für elektrische Antriebe - antriebstechnik.fh
Werbung

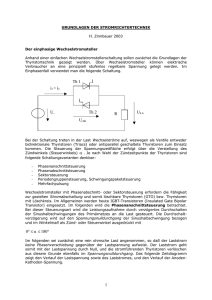
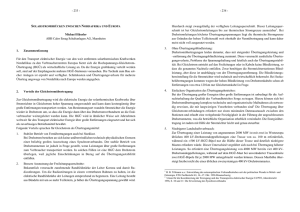
3. Stellglieder für elektrische Antriebe Der Energiefluß der elektrischen Maschinen wird über Stellglieder zu- bzw. abgeschaltet. In vielen Fällen dienen sie der Steuerung und Regelung dieses Energieflusses und werden zur Realisierung verschiedener Betriebszustände, wie Anlauf, Drehzahlstellung und Bremsen eingesetzt. Die Stellglieder müssen der Maschinenart angepaßt sein. 3.1 Übersicht und Einteilung der Stellglieder Zu den Stellgliedern gehören • Schaltgeräte Leistungsschalter, Schütze • konventionelle Stellgeräte Stelltransformatoren, Stellwiderstände • Maschinenumformer Leonardumformer, Synchronmaschinensätze • Stromrichter Wechsel-/Drehstromsteller, Gleich- und Wechselrichter, Gleichstromsteller und Umrichter Da Stromrichter vielseitige Stellmöglichkeiten bieten, haben sie die Maschinenumformer weitgehend verdrängt. Stromrichter erzeugen durch Oberschwingungen größere Netzverzerrungen und haben für verschiedene Aussteuerbereiche einen größeren Bedarf an Grundschwingungsblindleistung. Leistungselektronische Stellglieder lassen sich nach ihrer Funktion einteilen. • Wechselstromsteller zur Veränderung der Wechselspannung ohne Frequenzänderung. • Gleichrichter zur Umwandlung von Wechsel- in Gleichspannung. Wechselrichter zur Umwandlung von Gleich- in Wechselspannung. • Gleichstromsteller zur Veränderung des Mittelwertes der Gleichspannung. • Umrichter zur Umwandlung von Wechselspannung mit einer Frequenz und Phasenzahl in eine andere Wechselspannungsart variabler Frequenz und Spannung. Stromrichter werden auch nach Art und Herkunft der Kommutierungsspannung eingeteilt. • kommutierungsfreie Stromrichter sind Schalter und Steller für Wechelstrom. • fremdgeführte Stromrichter, bei denen die Kommutierungsspannung nicht vom Stromrichtergerät geliefert wird. Diese wird entweder vom Netz (netzgeführter Stromrichter) oder von der Last (lastgeführter Stromrichter) zur Verfügung gestellt. • selbstgeführte Stromrichter, bei denen der Stromrichter selbst die Kommutierungsspannung bereitstellt. Bauelemente für Stromrichter: Dioden, Netzthyristoren (SCR), Frequenzthyristoren, Triacs, Abschaltthyristoren (GTO), bipolare Leistungstransistoren, Feldeffekt-Leistungstransistoren, IGBT, MCT. 3.2 Stellglieder für Gleichstromantriebe Netzgeführte Stromrichter Für die Energieversorgung von Gleichstrommaschinen im industriellen Einsatz, werden meist Stromrichterschaltungen eingesetzt, welche die variable Gleichspannung unmittelbar aus der Kurvenform der Netzspannung bilden. Da bei diesen Stromrichtern die Ansteuerung der Leistungshalbleiter (Dioden und/oder Thyristoren) netzsynchron erfolgen muß, werden sie netzgeführte Schaltungen genannt. Thyristoren lassen sich durch einen Stromimpuls auf die Steuerelektrode (Gate) während der positiven Halbschwingung der Netzspannung einschalten und haben bis zum nächsten Stromnulldurchgang die Eigenschaften einer Diode. Prinzipiell können Mittelpunktschaltungen (M1 und M2 am Wechselstromnetz, M3 und M6 am Drehstromnetz) oder Brückenschaltungen eingesetzt werden. Besondere Bedeutung haben die Zweipuls-Brückenschaltung B2 für den Anschluß an das Wechselstromnetz (bis 3 kW) und die Sechspuls-Brückenschaltung B6 für den Anschluß an das Drehstromnetz (bis 500 kW). G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 20 - (+) U1 U2 U3 Ld Ud - (+) GM Id + (-) + (-) Bei der Projektierung eines Gleichstromantriebs muß neben den Nenndaten PN, UN und nN auch bekannt sein, ob ein Motorbetrieb für eine oder beide Drehrichtungen und eventuell eine Nutzbremsung erforderlich ist. Durch die Beziehungen n ∼ UA/Φ und M ∼ IA · Φ liegt dabei fest, welche Vorzeichen Ankerspannung, -strom und Hauptfeld in den verschiedenen Arbeitsweisen haben. An einem einfachen netzgeführten Stromrichter, der Dreipuls-Mittelpunktschaltung (M3), werden im folgenden die charakteristischen Eigenschaften netzgeführter Stromrichter untersucht. Dreipuls-Mittelpunktschaltung M3 Ohne Berücksichtigung der Kommutierung erhält man für den arithmetischen Mittelwert der Gleichspannung bei Vollaussteuerung: 3 3⋅ 3 π U di = 2 U str ⋅ sin = ⋅ U str (3.1) 3 π π⋅ 2 Man bezeichnet Udi als ideelle Leerlaufgleichspannung bei ungesteuertem Gleichrichterbetrieb, die sich unter Vernachlässigung ohmscher und induktiver Spannungsfälle aus der Phasenspannung Ustr auf der Sekundärseite des Stromrichtertransformators ergibt. Für die beim Steuerwinkel α auftretende ideelle Leerlaufgleichspannung Udiα gilt: U diα = U di ⋅ cos α (3.2) Der Mittelwert der Gleichspannung netzgeführter Stromrichter ändert sich nach der cos-Funktion des Steuerwinkels α. Der Steuerwinkel kann von Vollaussteuerung bei α = 0° stetig gesteigert werden. Die abgegebene Gleichspannung ändert sich u2 u3 u1 u1 dabei entsprechend Gl. (3.2). ud Bei α = 90° ist der Mittelwert 0 der Gleichspannung Null. Bei ωt weiterer Vergrößerung des Steuerwinkels über 90° hinaus 0 π/3 -π/3 wird der Mittelwert der Gleichspannung negativ und steigt α α mit zunehmendem Steuerwinu2 u3 u1 u1 kel mit negativem Vorzeichen ud weiter an. Bei α = 180° - γ 0 erreicht sie den maximal ωt möglichen negativen Mittelwert. Gleichspannungsbildung bei der M3-Schaltung Der Bereich mit Steuerwinkeln von α = 0° bis 90° wird Gleichrichterbetrieb und von α = 90° bis 180° - γ mit negativem Gleichspannungsmittelwert wird Wechselrichterbetrieb genannt. Im Gleichrichterbetrieb erfolgt der Energiefluß vom Drehstromnetz über den Stromrichter zur Gleichstrommaschine. Im Wechselrichterbetrieb dreht sich die Richtung des Energieflusses. G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 21 Im Wechselrichterbetrieb muß ein Sicherheitsabstand zum Schnittpunkt der Phasenspannungen eingehalten werden, deshalb darf der Steuerwinkel α nur bis 180° - γ gesteigert werden. Der Löschwinkel γ stellt die erforderliche Schonzeit tc für die Thyristoren sicher. Unter Kommutierung versteht man die Übergabe eines Stromes von einem Stromzweig auf einen anderen, wobei während der Kommutierungszeit tu beide Zweige Strom führen. Der Verlauf des Kommutierungsstromes läßt sich aus der Kommutierungsspannung Uk, die bei netzgeführten Stromrichtern sich als Differenz der sinusförmigen Wechselspannungen zweier miteinander kommutierender Phasen ergibt, und der im Kommutierungskreis liegenden Impedanzen berechnen. π (3.3) q Bei der M3-Schaltung ist die Kommutierungszahl q = 3. Werden die ohmschen Widerstände im Kommutierungskreis vernachlässigt und wird außerdem angenommen, daß die Kommutierungsinduktivitäten Lk gleich groß sind, so gilt für den Verlauf U k = 2U str ⋅ sin 2U k ⋅ (cos α - cos ωt) = i 2 = I d - i1 (3.4) 2ωL k des Kurzschlußstromes ik (Phasenkurzschluß für tu) im Kommutierungskreis: Die Kommutierungszeit tu wird Überlappungszeit oder einfach Überlappung u genannt und in elektrischen Graden angegeben. Integriert man die Maschengleichung des vereinfachten Kommutierungskreisen über die Kommutierungszeit tu, so erhält man: 2ωL k ⋅ I d I cos(α + u) = cos α = cos α - d (3.5) 2U k 2I k ik = u1 u2 u3 Lk uk Lk Lk Rk Rk Rk uA1 i1 i2 Ld ud GM i3 Id M3-Schaltung und Kommutierung bei α = 0° G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 22 ud u1 u3 u2 0 Kommutierung bei der M3-Schaltung im Gleichrichterbetrieb (α = 30°) u α i1 i i2 Id i3 ωt α = 30° u1 u3 u2 ud 0 u α i Kommutierung bei der M3-Schaltung im Wechselrichterbetrieb (α = 140°) γ i2 i1 i3 Id ωt α = 140° Wird der Stromrichter mit dem Gleichstrom Id belastet, so ergibt sich ein Mittelwert der Gleichspannung Ud am Ausgang, der infolge von Spannungsfällen kleiner ist als Udi. Dieser Spannungsfall setzt sich aus der induktiven Gleichspannungsänderung Dx (Udx), der ohmschen Gleichspannungsänderung Dr (Udr) und der Durchlaßspannung der Stromrichterventile zusammen. U dα = U di ⋅ cos α - D x - D r - U F (3.6) cos α + cos(α + u) = U di ⋅ - R k ⋅ Id - U F 2 UF Dr Udi Dx UdN Ld Dx Lk Dr Rk UF uF G. Schenke, 3.2003 ud Ud 0 GM Id 0 Id IdN M3-Schaltung mit linearisierter Belastungskennlinie bei voller Aussteuerung (α = 0°) Automatisierte Antriebe FB Technik, Abt. E+I 23 Ld UL ud uA GM iA Gleichstromantrieb mit Stromrichter in Sechspuls-Brückenschaltung (B6) Die Bildung der momentanen Stromrichterspannung ud erfolgt nach dem für die DrehstromBrückenschaltung gültigen Diagramm unter der Voraussetzung, daß für den Laststrom stets iA > 0 gilt. α = 0° ud 30° α 60° 90° 120° 150° u 0 Bildung der Gleichspannung ud bei der B6-Schaltung Gleichrichterbetrieb α ωt Wechselrichterbetrieb Bei der Sechspuls-Brückenschaltung (B6, Drehstrom-Brückenschaltung) entsteht der maximale Mittelwert der Gleichspannung durch die Hüllkurve der Netzspannung UL. 3⋅ 2 U di = ⋅ UL für B6 - Schaltung (3.7) π Für die Zweipuls-Brückenschaltung (B2, Einphasen-Brükenschaltung) gilt für Udi entsprechendes. 2⋅ 2 U di = ⋅ UL für B2 - Schaltung (3.8) π Für die Berechnung von Udiα gilt Gl. (3.2) und für die Bestimmung des Mittelwertes der Gleichspannung Ud (Udα) gilt analog Gl. (3.6); hier muß berücksichtigt werden, daß zwei Ventile in Reihe geschaltet sind. Werden keine negativen Gleichspannungen benötigt, so kann man bei den Brückenschaltungen B2 und B6 die Hälfte der Thyristoren durch Dioden ersetzen und man erhält eine halbgesteuerte Schaltung. Die Abhängigkeit der Gleichspannung Udiα vom Steuerwinkel α berechnet sich hier nach Gl.(3.9): U diα = 1 U di ⋅ (1 + cos α) (3.9) 2 Sind für einen Gleichstromantrieb beide Drehrichtungen vorgesehen, so muß eine Momentenumkehr und damit bei fester Erregung eine Umpolung des Ankerstromes möglich sein. Sind stromlose Pausen von rd. 0,2 s möglich, so kann die Umpolung des Ankerstromes mit einem mechanischen Umschalter erfolgen, ansonsten ist eine Gegenparallelschaltung zweier Stromrichter im Ankerkreis notwendig. G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 24 Bei Umkehr des Drehmomentes kann die Ankerstromrichtung beibehalten werden, wenn eine Änderung der Feldrichtung erfolgt. Da die Erregerleistung nur wenige Prozent der Nennleistung beträgt, kann man diese Lösung mit geringem Zusatzaufwand realisieren. Es ist jedoch zu berücksichtigen, daß bei jeder Umsteuerung mit Rücksicht auf den Feldabbau eine Pause von 0,5 bis 2,5 s entsteht. L1 L2 L3 N iA L iA L GM IE IE L L IE GM iA iA L L iA GM iA IE IE a) b) c) a) b) c) Ankerumschaltung mit einem Polwender Feldumkehr durch zwei Stromrichter Gegenparallelschaltung zweier Stromrichter im Ankerkreis Schaltung für Umkehrantriebe Gleichstromsteller Während bei allen netzgeführten Stromrichterschaltungen die Bildung der variablen Ankerspannung durch Phasenanschnittsteuerung der Netzwechselspannung erfolgt, arbeitet der Gleichstromsteller bereits mit einer konstanten Gleichspannung am Eingang (z.B. Batterie). Beim Gleichstromsteller wird durch ein elektronisches Stellglied S die Netzspannung UN mit möglichst hoher Frequenz fP pulsförmig auf den Antrieb geschaltet. Bei der häufig verwendeten Pulsbreitensteuerung ist dabei innerhalb der konstanten Periodendauer tP = 1/fP die Einschaltzeit tE einstellbar. In den Pausen fließt der Ankerstrom IA über einen Freilaufkreis mit der Diode D weiter. S L D elektronischer Ein-Ausschalter Glättungsinduktivität Freilaufdiode S iN L D Prinzipschaltung G. Schenke, 3.2003 tE tA iA tP UN uL uL iD UN iA iN iD UA GM uL uA t Pulsbreitensteuerung der Gleichspannung UA Technik eines Gleichstromstellers Automatisierte Antriebe FB Technik, Abt. E+I 25 Wenn das Stellglied S während der Zeit tE geschlossen ist, nimmt der Antrieb mit iA = iN Energie aus dem Netz auf. Die Spannungsgleichung des Kreises lautet: di UN = UA + uL mit u L = L ⋅ A (3.10) dt In der Zeit tA ist das Stellglied S geöffnet; der Strom iA = iD klingt infolge der magnetischen Energie der Induktivität L nur langsam über den Freilaufkreis ab. Im Freilaufkreis gilt: UA + uL = 0 (3.11) Der Ankerstrom schwankt um den Wert ∆i, der um so kleiner ist, je größer die Pulsfrequenz fP und die Induktivität L gewählt werden. Als Mittelwert der Spannungsimpulse stellt sich die Ankerspannung UA nach Gl.(3.12) ein. tE tE = UN ⋅ (3.12) tP tE + tA Die Ankerspannung kann so stufenlos zwischen Null und UN variiert werden. Als Stellglied werden heute vorwiegend eingesetzt: • Feldeffekt-Leistungstransistoren und IGBT's bis zu mittleren Leistungen bei hoher Schaltfrequenz; • GTO-Thyristoren bei hohen Leistungen. Durch Vertauschen der Anordnung von Freilaufdiode und Stellglied kann eine Rücklieferung von Energie in die Batterie beim Gleichstromsteller erfolgen. UA = UN ⋅ 3.3 Stellglieder für Drehstromantriebe Drehstromsteller Die Schaltung eines dreiphasigen Drehstromstellers wird mit drei gegensinnig parallelen Thyristorpaaren gebildet; diese werden periodisch angesteuert. Bei kleinen Antrieben kann ein Thyristorpaar durch einen Triac ersetzt werden. L1 L2 L3 N 1,0 Ieff I0eff i1 i2 R 0,6 R 0,2 0 L L cosϕ = 1 0,4 i3 R cosϕ = 0 0,8 L 0 30 60 90 120 150 180 α/° Steuerkennlinie eines Drehstromstellers Drehstromsteller mit ohmsch-induktiver Last Der Steuerwinkel α entspricht dem Winkel zwischen dem Nulldurchgang einer Phasenspannung, das ist der Nulldurchgang des ungesteuerten ohmschen Dauerstromes einer Phase, und dem zugehörigen Zündwinkel. Durch Vergrößerung des Steuerwinkels α von 0° auf 150° bei ohmscher Last und von 90° bis 150° bei induktiver Last kann die Leistungsaufnahme einer symmetrischen dreiphasigen Last stetig zwischen dem Maximalwert und Null gesteuert werden G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 26 Pulsgesteuerter Widerstand Abschaltbare leistungselektronische Ventile können parallel oder in Reihe zu ohmschen Widerständen R angeordnet werden. Dadurch ergibt sich die Möglichkeit, den wirksamen Widerstand R* abhängig vom Einschaltverhältnis λ = TE/T zu verändern. Dieser pulsgesteuerte Widerstand ist eine Sonderform des Gleichstromstellers. Beim pulsgesteuerten Widerstand in Parallelschaltung ist zur Glättung des Gleichstromes ein Energiespeicher in Form einer Induktivität L notwendig. Der wirksame Widerstand R* kann hier zwischen den Werten Null (Ventil leitend) und R (Ventil gesperrt) stetig verändert werden. Beim pulsgesteuerten Widerstand in Reihenschaltung kann der wirksame Widerstand R* zwischen R und unendlich verstellt werden. Als Ventile werden FET´s (kleine Leistung), IGBT's (mittlere Leistung) und GTO's (große Leistung) eingesetzt. Direktumrichter Umkehrstromrichter können zur Umformung von Wechsel- bzw. Drehstrom einer Frequenz f1 in eine andere Frequenz f2 verwendet werden. Dazu muß man ihre Ausgangsspannung periodisch umsteuern, und zwar im Takt der geu1 u2 u3 wünschten Ausgangsfrequenz f2. Die Frequenzumformung erfolgt durch direktes u Umschalten der Phasenspannungen des 0 Primärnetzes ohne Benutzung eines Gleichstromzwischenkreises, daher spricht man von Direktumrichtern. Die Ausgangsfrequenz f2 darf max. 40% der NetzT1 n Kuppen je T 2/2 t frequenz f1 erreichen. p 1 T1 T2 Spannungsverlauf beim Trapezumrichter Beim sogenannten Trapezumrichter, einem Hüllkurvenumrichter, verläuft die Spannung einer Ausgangsphase auf den Kuppen der Phasenspannungen des speisenden Drehstromnetzes. Zur Bildung der Ausgangsspannung einer Phase des Trapezumrichters ist ein Umkehrstromrichter, bestehend aus zwei antiparallelen M3-Schaltungen, erforderlich (insgesamt 18 Thyristoren für drei Phasen, p1 = 3). Mit diesem Direktumrichter können nur diskrete, nach Gl.(3.13) berechnete Ausgangsfrequenzen f2 erreicht werden. p1 f 2 = f1 ⋅ n = 1, 2, 3, ..... (3.13) p1 + 2 ⋅ (n - 1) f1 f2 U2 St u2 Beim Steuerumrichter wird die Ausgangsspannung der beiden gegenparallel arbeitenden Teilstromrichter sinusförmig ausgesteuert. Die Steuerwinkel αI und αII müssen während jeder Halbschwingung der Ausgangsspannung stetig verändert werden. Jede Ausgangsphase wird von der Gegenparallelschaltung 6pulsiger Teilstromrichter (B6-Schaltungen) mit insgesamt 36 Ventile gebildet. Schaltung des Steuerumrichter f2 M 3~ G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 27 α Gleichrichterbetrieb uI 0 t α Wechselrichterbetrieb Spannung einer Phase beim Steuerumrichter Die abgegebene Ausgangsspannung wird einem vorgegebenen sinusförmigen Sollwert möglichst gut angenähert. Beide Teilstromrichter arbeiten abwechselnd im Gleich- bzw. Wechselrichterbetrieb. Der Verschiebungsfaktor der Lastseite bestimmt dabei die jeweilige Stromrichtung. Wegen überwiegender Phasenanschnittsteuerung ist der Blindleistungsbedarf aus dem speisenden Drehstromnetz beim Steuerumrichter hoch. Maschinengeführter Wechselrichter Der lastgeführte Wechelrichter bezieht von der Last, z. B. eine übererregte Synchronmaschine, seine Kommutierungsblindleistung - Strom muß der Spannung voreilen -. Die Schaltung ermöglicht im allgemeinen auch eine Umkehr des Energieflusses. Die Schaltung maschinengeführter Wechselrichter, die aus der Hintereinanderschaltung eines netzgeführten Gleichrichters und eines lastgeführten Wechselrichters mit Synchronmaschine als Last besteht, wird auch Stromrichtermotor genannt. Im allgemeinen Ld Id I II wird im Gleichstromzwischenkreis eine Glättungsinduktivität Ld vorgesehen, die L1 den netzseitigen Stromrichter I vom lastL2 UdII UdI seitigen II energetisch entkoppelt. L3 Maschinengeführter Wechselrichter (Stromrichtermotor) Der netzseitige Stromrichter I arbeitet im Motorbetrieb der angeschlossenen Synchronmaschine als netzgeführter Gleichrichter. Er erzeugt die durch Anschnittsteuerung über den Steuerwinkel α einstellbare Gleichspannung UdI des Zwischenkreises. Der Strom im Gleichstromzwischenkreis Id wird durch die Induktivität Ld geglättet. Der lastseitige Stromrichter arbeitet als lastgeführter Wechselrichter. Er erzeugt die Gleichspannung UdII. Da Wechselrichterbetrieb vorliegt, ist der Mittelwert dieser Gleichspannung negativ. Im stationären Betrieb ist UdII = -UdI. Arbeitet die Synchronmaschine als Generator, so muß der Stromrichter II in den Gleichrichterbetrieb und der Stromrichter I in den Wechselrichterbetrieb umgesteuert werden. Im Stillstand kann die Synchronmaschine kein führendes Netz auf der Sekundärseite erzeugen, so daß das Anfahren z.B. durch Auf- und Zusteuern des eingangsseitigen Stromrichters im Takt der niedrigen Anfahrfrequenz erfolgen kann. Zwischenkreisumrichter Zwischenkreisumrichter bestehen aus drei wesentlichen Komponenten, dem netzgeführten Stromrichter, einem Strom- oder Spannungszwischenkreis und einem selbst- oder lastgeführten Wechselrichter. Die Schaltung mit lastgeführtem Wechselrichter (Stromrichtermotor) wurde zuvor behandelt. Kann die Last, z.B. eine Asynchronmaschine, keine Kommutierungsblindleistung bereitstellen, so muß ein selbstgeführter Stromrichter eingesetzt werden. Die Kommutierungsspannung muß hier über Löschkreise bereitgestellt werden, oder es müssen abschaltbare Stromrichterventile wie FET´s, IGBT's oder GTO's eingesetzt werden. G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 28 Stromzwischenkreis-Umrichter (I-Umrichter) Beim I-Umrichter liefert der netzseitige Stromrichter in Sechspuls-Brükenschaltung (B6Schaltung) einen durch die Anschnittsteuerung der Thyristoren einstellbaren Gleichstrom Id der infolge der Induktivität L der Zwischenkreisdrossel für den nachgeschalteten Stromrichter eingeprägt ist (Gleichstromzwischenkreis). ZD Der maschinenseitige StromWR GR richter arbeitet als selbstgeführter Wechselrichter. Die Technik der PhasenfolgelöND L1 schung mit sechs KondenL2 ASYM satoren erlaubt ein Ein- und Ausschalten der Thyristoren, L3 so daß der Gleichstrom Id in 120°-Stromblöcken in jedem Wicklungsstrang fließt. Schaltung des Stromzwischenkreis-Umrichters Die Last (Maschine) ist Bestandteil des Kommutierungskreises und muß mit dem Wechselrichter des Umrichters abgestimmt sein. Die Kommutierungseinrichtung im Wechselrichter muß sowohl das Löschen des abzulösenden Thyristors sicherstellen, als auch die in den Streuinduktivitäten der Maschine gespeicherte Energie aufnehmen können. Die Kondensatoren müssen so dimensioniert sein, daß keine unzulässigen Spannungserhöhungen entstehen. Durch das zyklische Aufschalten des Stromes an die Motorklemmen entsteht in der angeschlossenen Maschine ein sprungförmig umlaufendes Ständerfeld einstellbarer Frequenz. Für die Funktion der Regelelektronik gibt es je nach den Anforderungen an die Dynamik des Antriebs unterschiedliche Konzepte. Mit entsprechendem Aufwand lassen sich etwa Stellzeiten eines Gleichstromantriebs erreichen. Besonders einfach und ohne Mehraufwand im Leistungsteil ist ein Vierquadrantenbetrieb möglich. Mit einer Spannungsumkehr im Zwischenkreis durch Wechselrichteransteuerung des netzseitigen Stromrichters bei unveränderter Stromrichtung kann eine Rückspeisung von Bremsenergie ins Netz erfolgen. Durch Änderung der Ansteuerfolge beim maschinenseitigen Stromrichter erzielt man Drehrichtungsumkehr, was einen Wechsel in der Drehrichtung bewirkt. Für Drehstromantriebe mit I-Umrichtern können Normmotoren verwendet werden, wobei allerdings auf Grund der nichtsinusförmigen Ströme und Spannungen erhöhte Stromwärmeund Eisenverluste auftreten. Im allgemeinen genügt es zum Ausgleich, die Leistung um 10 bis 15 % herabzusetzen. Der typische Frequenzbereich liegt bei 2 Hz bis 87 Hz. Bei niedrigen Frequenzen wird der Rundlauf der Asynchronmaschine durch Zwischentaktung erreicht. Spannungszwischenkreis-Umrichter (U-Umrichter) U-Umrichter mit variabler Zwischenkreisspannung bestehen im allgemeinen aus einem netzgeführten, gesteuerten Stromrichter zur Bildung der variablen Zwischenkreisspannung, einem Zwischenkreis, bestehend aus Glättungdrossel und Zwischenkreiskondensator, und dem selbstgeführten Stromrichter (Wechselrichter) zur Bildung der frequenz- und spannungsvariablen Ausgangsspannung. Selbstgeführte Wechselrichter bestehen heute fast ausschließlich für alle Leistungsbereiche aus abschaltbaren Stromrichterventilen, für den unteren Leistungsbereich aus Leistungs-MOSFET's, für den mittleren Leistungsbereich aus IGBT's und für hohe Leistungen aus GTO's. Selbstgeführte Wechselrichter für eine einphasige Last bestehen aus 4 abschaltbaren Ventilen mit jeweils antiparalleler schneller Diode. G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 29 Ud 2 Ud Ud 2 T1 D1 T4 D4 T3 D3 T2 D2 1 U12 2 Last Je zwei diagonal angeordnete abschaltbare Stromrichterventile werden für die Grundfunktion gleichzeitig angesteuert. Diese wechseln sich periodisch mit den beiden anderen abschaltbaren Stromrichterventilen entsprechend der gewünschten Frequenz ab. Bei ohmscher Last führen nur die abschaltbaren Stromrichterventile den Strom. Tritt auf der Lastseite Blindleistung auf, so sind auch die Dioden (Rücklaufzweige) periodisch an der Stromführung beteiligt. Bei Umkehr der Energierichtung übernehmen die Dioden die Stromführung. Einphasiger Wechselrichter Soll die Wechselspannung unabhängig von der Gleichspannung Ud verändert werden, so kann dies mit der Aussteuerung nach dem Schwenkverfahren oder nach dem Pulsverfahren erfolgen. Bei der Aussteuerung nach dem Schwenkverfahren werden Wechselspannungen zweier ungesteuerter Wechselrichter phasenα 180° versetzt addiert, wobei die Wechu10 u10 T1 T1 T1 T1 selspannung der beiden Wechsel0 0 T3 T3 richter um den Winkel α gegeneinander versetzt sind. Durch die Verkürzung der Spanu20 u20 T4 T4 T4 nungsblöcke wird die Grund0 0 T2 T2 T2 schwingungsamplitude der Aus180° 180° gangspannung verringert, so daß sich die Oberschwingungen mehr u12 u 12 U Ud hervor heben. Aus diesem Grund d kann dieses Verfahren der Span0 0 t t nungssteuerung nur in einem begrenzten Stellbereich eingesetzt werden. Vollaussteuerung Teilaussteuerung Spannungsverstellung nach dem Schwenkverfahren Bei der Aussteuerung nach dem Pulsverfahren werden die Stromrichterzweige in jeder Periode der Grundschwingung mehrfach gezündet und gelöscht. Durch das Pulsverfahren ergibt sich eine Folge einzelner Stromfluß- und Sperrzeiten im Stromrichterzweig, deren Verhältnis den Effektivwert der Ausgangsspannung bestimmt. Je nach Schaltung sind entweder nur zwei Spannungszustände +Ud und -Ud möglich oder drei Spannungszustände +Ud, 0 und -Ud. Pulsverfahren mit drei Spannungszuständen werden heute fast ausschließlich eingesetzt, da sie den Vorteil haben, daß die Energie nicht unnötig zwischen der angeschlossenen Maschine und dem Gleichspannungszwischenkreis pulsiert. Meistens wird nicht mit konstantem Einschaltverhältnis λ = TE/(TE + TA), sondern die Dauer der angelegten Spannungsblöcke dem Verlauf des sinusförmigen Sollwertes angepaßt, so ergibt sich eine gute Annäherung an die Grundschwingung. Die nach dem Pulsverfahren so erzeugte Grundschwingung der Ausgangsspannung wird auch Unterschwingung genannt. An der Maschine treten hierbei außer der Grundschwingung nur Oberschwingungen der gewählten Pulsfrequenz fp und noch höhere Harmonische auf. Der Maschinenstrom ist nahezu sinusförmig. G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 30 Te Te u Ud u Ud 0 0 t Ta t Ta Zwei Spannungszustände mit +Ud und –Ud Drei Spannungszustände mit +Ud, 0 und -Ud Te u Ud 0 nach Sinusfunktion veränderliches Einschaltverhältnis λ u1 t Ta Spannungssteuerung nach dem Pulsverfahren Umrichter mit konstanter Zwischenkreisspannung (Frequenzumrichter, früher Puls-Umrichter genannt) Frequenzumrichter bestehen im allgemeinen aus einem netzgeführten, ungesteuerten Stromrichter zur Bildung der konstanten Zwischenkreisspannung, einem Zwischenkreis, bestehend aus Glättungdrossel und Zwischenkreiskondensator, und dem selbstgeführten Pulswechselrichter zur Bildung der frequenz- und spannungsvariablen Ausgangsspannung. Im allgemeinen speist der netzseitige, ungesteuerte Stromrichter (Dioden in B6-Schaltung und bei S < 2 kW in B2-Schaltung) über eine Glättungsdrossel den Zwischenkreiskondensator C mit nahezu konstanter Gleichspannung Ud ein. Wegen des ungesteuerten Gleichrichters entsteht keine Steuerblindleistung und man arbeitet über den ganzen Stellbereich mit einem guten Grundschwingungsverschiebungsfaktor cosϕ1 im speisenden Netz. Die Netz-Oberschwingungen werden durch die netzseitige Drehstromdrossel begrenzt, so daß der Leistungsfaktor λ > 0,8 erreicht wird. EMV-Filter reduzieren die höheren Frequenzen im Netzstrom auf zulässige Werte. Zur Stützung des Zwischenkreises können Batterien herangezogen werden, die eine Überbrückung bei Netzausfällen ermöglichen. Der Zwischenkreis läßt sich außerdem als Gleichspannungs-Sammelschiene ausbilden, an die mehrere, voneinander unabhängige Pulswechselrichter angeschlossen sein können. L1 L2 netzseitige Drossel Gleichrichter Zwischenkreis Pulswechselrichter Schutzdrossel ASYM L3 Frequenzumrichter mit konstanter Zwischenkreisspannung Der maschinenseitige Pulswechselrichter schaltet Spannungsblöcke variabler Breite (z.B. Pulsbreitenmodulation) auf die Maschinenklemmen, so daß sich eine sinusförmige Grundschwingung der gewünschten Frequenz bildet. G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 31 Beim Pulswechselrichter in Drehstrom-Brückenschaltung ist bei sinusförmigem Stromverlauf und symmetrischer Last die Summe der aufgenommenen Phasenleistungen auf der Wechselstromseite konstant. In der Grundschaltung ist beim Frequenzumrichter nur Motorbetrieb möglich, wobei durch Vertauschen der Phasenfolge bei der Ansteuerung der abschaltbaren Stromrichterventile eine Drehrichtungsumkehr entsteht. Für den Bremsbetrieb wird meistens ein ohmscher Widerstand über einen Widerstandsschalter (Chopper) im Zwischenkreis vorgesehen. Mit hohem Zusatzaufwand ist auch Energierückspeisung ins Netz bei Bremsbetrieb möglich. Beim Frequenzumrichter wird die Zwischenkreisspannung durch den Pulswechselrichter mit einer hohen Taktfrequenz auf die Maschine geschaltet, ein nahezu sinusförmiger Maschinenstrom wird so angestrebt. Bei Frequezumrichtern mit IGBT´s ist die Taktfrequenz bis 16 kHz wählbar; bei Frequenzumrichtern mit FET´s (nur bei kleiner Leistung) kann die Taktfrequenz bis zu 100 kHz betragen. L1 LN LF Dreiphasiger Wechselrichter für Frequenzumrichter mit Energierückspeisung L2 L3 Ud CF Statt der sonst bei Frequenzumrichtern verwendeten ungesteuerten Gleichrichterdiodenbrücke (ungesteuerte B6-Schaltung) zwischen den Netzklemmen und dem Gleichspannungs-Zwischenkreis werden ein dreiphasiger Wechselrichter und ein L-C-L-Filter eingefügt. Dabei ist das Leistungsstellglied dieses dreiphasigen Eingangsteils wie ein üblicher Puls-Wechselrichter (Ausgangsseite eines normalen Frequenzumrichters) aufgebaut. Der dreiphasige Wechselrichter mit den Filterdrosseln LF und den Kondensatoren CF stellt eine steuerbare dreiphasige Spannungsquelle dar. Über die Netzdrosseln LN läßt sich der sinusförmige Netzstrom frei einstellen (Amplitude und Phasenlage). Der Regler hält die Zwischenkreisspannung Ud konstant und übernimmt die Netzsynchronisation. Dazu wird der Wirkstromsollwert IWsoll über ein PI-Glied aus der Differenz Sollwert der Zwischenkreisspannung und Istwert der Zwischenkreisspannung Ud ermittelt; der Blindstromsollwert wird mit IBsoll = 0 vorgegeben. Beim "Speisen" (Motorbetrieb) sind die Netzspannung und der nahezu sinusförmige Netzstrom in Phase. Beim "Rückspeisen" (Generatorbetrieb) sind die Netzspannung und der nahezu sinusförmige Netzstrom um 180° phasenverschoben. Vorteile des dreiphasigen Wechselrichters mit L-C-L-Filter für Frequenzumrichter sind: • stabilisierte konstante Zwischenkreisspannung, • Speisen vom und Rückspeisen in das Versorgungnetz möglich, • Leistungsfaktor │λ│ nahe 1, das heißt, fast keine Blindleistungsaufnahme und geringer Oberschwingungsgehalt, • geringer Funkstörspannungspegel. G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 32 Versorgungs- und Rückspeisemodule für Frequenzumrichter (FU) im Verbundbetrieb Werden mehrere Frequenzumrichter im Verbund als sogenannter Mehrachsenantrieb, wie bei Robotern betrieben, so kann ein Versorgungs- und Rückspeisemodul den Energieaustausch zwischen dem Drehstromnetz und der gemeinsamen Gleichspannungsschiene (GleichspannungsZwischenkreis) übernehmen. Der Energieaustausch zwischen den einzelnen Frequenzumrichtern erfolgt über die Gleichspannungsschiene. Die Energieversorgung erfolgt über die ungesteuerte B6-Schaltung. Der Einspeisebetrieb ist damit in weiten Grenzen und L1 sogar beim Ausfall einer Phase Ud möglich. Der Rückspeisebetrieb L2 erfolgt nur, wenn alle drei L3 Phasen im Frequenzbereich von 48 Hz ... 62 Hz vorhanden sind. Versorgungs- und Rückspeisemodul für FU Der Rückspeisebetrieb setzt automatisch ein, wenn die Gleichspannung den Scheitelwert der Netzspannung um ca. 20 V überschreitet. Der Rückspeisebetrieb wird eingestellt bei Übertemperatur oder beim Überschreiten der Spitzenbremsleistung. Abhilfe schaffen hier zusätzliche Bremseinheiten. Dem Versorgungs- und Rückspeisemodul muß eine Netzdrossel oder besser ein Filter vorgeschaltet werden. Beispielhaft sind die Messungen an einem 15-kW-Asynchronmaschinen-Antrieb mit Versorgungs- und Rückspeisemodul für den Frequenzumrichter. I1 = 8,3 A Ud = 550 V U1 = 233 V I1 = 5,4 A Ud = 580 V 400 300 30 300 30 200 20 200 20 100 10 100 10 0 0 0 0 u1 in V 40 40 -100 -10 -100 -10 -200 -20 -200 -20 -300 -30 -300 -30 -40 10 12 14 16 18 20 t in ms -400 -400 0 2 4 6 8 0 2 4 6 8 i1 in A U1 = 231 V i1 in A u1 in V 400 -40 10 12 14 16 18 20 t in ms Einspeisebetrieb bei Motorbetrieb Rückspeisebetrieb bei Generatorbetrieb Netzstrom i1 und Netzspannung u1 bei n = 500 min-1, M = 60 Nm I1 = 14,4 A Ud = 538 V I1 = 9,6 A U1 = 235 V Ud = 581 V 400 300 30 300 30 200 20 200 20 100 10 100 10 0 0 0 0 u1 in V 40 40 -100 -10 -100 -10 -200 -20 -200 -20 -300 -30 -300 -30 -40 10 12 14 16 18 20 t in ms -400 -400 0 2 4 6 8 0 2 4 6 8 i1 in A U1 = 230 V i1 in A u1 in V 400 -40 10 12 14 16 18 20 t in ms Einspeisebetrieb bei Motorbetrieb Rückspeisebetrieb bei Generatorbetrieb Netzstrom i1 und Netzspannung u1 bei bei n = 1000 min-1, M = 60 Nm) G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 33 3.4 Netzrückwirkungen von Stromrichtern Unter Netzrückwirkungen von Stromrichtern versteht man den Einfluß ihrer Blindleistung und ihrer Stromoberschwingungen auf das elektrische Netz. Hierdurch wird die Spannung gesenkt bzw. verzerrt. Induktive Blindleistung entsteht, wenn infolge der Phasenanschnittsteuerung des Stromrichters die erste Harmonische des Netzstromes gegenüber der zugeordneten Strangspannung nacheilt. Im ungesteuerten Bereich (α = 0°) ist das beim Kommutierungsvorgang durch den verzögerten Stromübergang von einem Ventil auf das andere der Fall. Im gesteuerten Betrieb (α > 0°) wird die Phasenverschiebung um den Steuerwinkel α vergrößert und damit die vom Stromrichter aufgenommene Blindleistung erhöht. Nach ihrer Entstehung bezeichnet man diese Grundschwingungsblindleistung Q1 als Kommutierungs- bzw. Steuerblindleistung. Wird der geringe Magnetisierungsstrom des Stromrichtertransformators vernachlässigt, so gilt für vollgesteuerte Schaltungen ohne Freilaufdiode (M3, B2, B6): Q1 2u + sin 2α - sin [2 ⋅ (α + u)] = sin ϕ1 = (3.14) S1 4 ⋅ [cos α - cos (α + u)] Für den ungesteuerten Betrieb mit dem Steuerwinkel α = 0° und dem Überlappungswinkel u = u0 gilt: Q1 2u 0 - sin 2u 0 = (3.15) 4 ⋅ (1 - cos u 0 ) S1 α = 0° S1 = Scheinleistung des Stromrichters für die Grundschwingung Häufig beträgt der Überlappungswinkel u0 nur wenige Grade, so daß die Kommutierungsblindleistung vernachlässigt werden kann (u = 0°). Aus Gl. (3.14) erhält man: Q1 = sin α (3.16) S1 u = 0° Für den Grundschwingungsverschiebungsfaktor cosϕ1 gilt: P cos ϕ1 = = S1 Q12 1- 2 S1 (3.17) 0,8 Q1 Udi·Id 0,6 40° 20° 30° 10° 0° 0,4 40° 30° 20° 10° 0° 0,2 γ -1 -0,8 -0,6 -0,4 -0,2 0,2 0,4 0,6 0,8 Ud Anfangsüberlappung u0 = 0°; 10°; 20°; 30°; 40° Udi ∞ ∑I 0 Grundschwingungsblindleistung in Abhängigkeit von der Gleichspannung für vollgesteuerte Schaltungen (M3, B6) Eine weitere Blindleistungskomponente ist die Verzerrungsblindleistung D. Wird sinusförmige Netzspannung und 1 nichtsinusförmiger Strom vorausgesetzt, dann gilt: 2 ν I1 (3.18) I I ki = Oberschwingungsgehalt (Klirrfaktor) und gi = Grundschwingungsgehalt des Stromes I ki = ν=2 G. Schenke, 3.2003 gi = Automatisierte Antriebe FB Technik, Abt. E+I 34 Die Grundschwingungsscheinleistung S1, die Wirkleistung P, die Oberschwingungsblindleistung D und die Grundschwingungsblindleistung Q1 werden nach Gl. (3.19) berechnet. S1 = S ⋅ g i P = S ⋅ g i ⋅ cos ϕ1 = S ⋅ λ (3.19) D = S⋅ ki Q1 = S ⋅ g i ⋅ s inϕ1 Bei Stromrichtern entstehen sowohl auf der Gleichstrom- als auch auf der Wechselstromseite Oberschwingungen, die miteinander in Wechselwirkung stehen. Unter Annahme völliger Glättung des Gleichstromes und Vollaussteuerung entstehen auf der Gleichstromseite Spannungsoberschwingungen Uvi (k = 1, 2, 3 ....) 2 U νi = 2 ⋅ U di mit ν u = k ⋅ p (3.20) ν u -1 und auf der Netzseite enthält der Netzstrom neben der Grundschwingung Oberschwingungen Iv I (3.21) Iν = 1 mit ν i = k ⋅ p ± 1 νi v = Ordnungszahl der Oberschwingung p = Pulszahl Maßnahmen zur Verminderung der Netzrückwirkungen Aus energietechnischen Gründen ist es wichtig, die auftretende Blindleistung und die Oberschwingungen möglichst weitgehend zu kompensieren. Das kann durch eine ventil- und netzseitige Kompensation bzw. Verringerung der Blindleistung geschehen. Vollgesteuerte Brücken- und Mittelpunktschaltungen benötigen abhängig von der Aussteuerung eine sehr hohe Blindleistung. Mit der Folgesteuerung von zwei Teilstromrichtern, die meistens durch Reihenschaltung eines nicht steuerbaren mit einem steuerbaren Stromrichter gebildet wird, kann der Blindleistungsbedarf reduziert werden. Ein ähnliches Verhalten bezüglich des Blindleistungsbedarfs zeigen halbgesteuerte Brückenschaltungen (B6H) mit und ohne Freilaufdiode. Q1 Udi·Id 0,8 40° Verminderung der Netzblindleistung bei Folgesteuerung 0° 0,2 γ -1 -0,8 -0,6 -0,4 -0,2 γ 0 0,2 0,4 0,6 0,8 Ud Anfangsüberlappung u0 = 0° bzw. 40° Udi 1 Mit der Reihenschaltung eines ungesteuerten Stromrichters (Gleichrichters) mit einem nachgeschaltetem Gleichstromsteller kann die Steuerblindleistung weitgehend vermieden werden. Netzseitig kann die Grundschwingungsblindleistung Q1 mit Kompensationseinrichtungen erfolgen, die häufig aus regelbaren Kondensatoranlagen bestehen. Bei der Auslegung dieser Anlagen ist auf Resonanzerscheinungen zu achten, um eine Überlastung der Kondensatoren und unzulässige Verzerrungen der Netzspannung zu vermeiden. Deshalb werden häufig zu den Leistungskondensatoren Drosselspulen in Reihe geschaltet, um so die Resonanzlage der Anlage zu verstimmen. In der Praxis haben sich Resonanzfrequenzen unterhalb der 5. Oberschwingung bewährt. Q C = P ⋅ ( tan ϕ - tan ϕ C ) (3.22) G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 35 Die Verzerrungsleistung D kann durch Gruppenschaltungen oder durch netzseitige Saugkreise verringert werden. Mit zunehmender Pulszahl verringert sich der Oberschwingungsgehalt des Stromes. Die Amplitude der einzelnen Stromoberschwingung ist von der Belastung und der Ordnungszahl abhängig. Bei Stromrichterleistungen oberhalb von 300 kVA finden deshalb vorwiegend 12pulsige Schaltungen Anwendung. Eine weitere Möglichkeit zur Vermeidung der Stromoberschwingungen im Netz besteht durch Kurzschließen der vom Stromrichter erzeugten Oberschwingungen mit Resonanzkreisen (Saugkreise). L1 UL1N US1 3 2 2 L3 L2 1 3 UStr3 2 IdI UdI LS UdII IdII Id Ud M Ld 12pulsige Schaltung aus zwei parallel geschalteten Drehstrombrücken (B6.2/15-Schaltung) Q IQ Un Iν IC5 IC7 IC11 IC13 Id M 250 Hz ν=5 350 Hz ν=7 550 Hz ν = 11 650 Hz ν = 13 Stromrichter mit abgestimmte Saugkreisen G. Schenke, 3.2003 Automatisierte Antriebe FB Technik, Abt. E+I 36