Formelsammlung Physik I Schrewe
Werbung

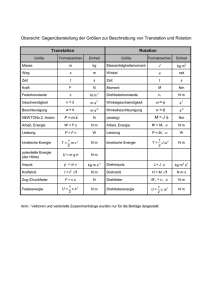
Hochschule Hannover Fakultät II Maschinenbau und Bioverfahrenstechnik Vorlesung: Physik I Formelsammlung ----------------------------------------------------------------------------------------------------------------KINEMATIK Translation Rotation Verschiebung: Geschwindigkeit: Beschleunigung: s ds v dt dv d 2 s a dt dt 2 Gleichförmige Geschwindigkeit s v t v const. a0 Drehwinkel: Winkelgeschwindigkeit: Winkelbeschleunigung: d dt d d 2 2 dt dt Gleichförmige Winkelgeschwindigkeit t const. 0 Gleichförmige Beschleunigung Gleichförmige Winkelbeschleunigung 1 2 1 v a t a const. s a t t2 t const. 2 2 -----------------------------------------------------------------------------------------------------------------------v r a r Bahngröße = Radius * Winkelgröße: s r -----------------------------------------------------------------------------------------------------------------------dN 1 n Drehzahl: Umdrehungszeit: T dt n 2 r 2 Bahngeschwindigkeit: v 2 r n Winkelgeschwindigkeit: 2 n T Τ v2 Zentripetalbeschleunigung: a r v 2 r r ----------------------------------------------------------------------------------------------------------------------- Zerlegung einer beliebigen Beschleunigung in Tangential-( T ) - und Normalbeschleunigung ( N ) dv dv aT T aN N a aT T a N N dt dt v v v y aT x a x a y z a z a N a 2 aT2 v v v -----------------------------------------------------------------------------------------------------------------------DYNAMIK Translation Rotation Masse: m Trägheitsmoment: J mi ri 2 r 2 dm i dp d L Kraft: F ma Drehmoment: M r F J dt dt p mv Impuls: L r p J Drehimpuls: dW F ds Arbeit: dW M d Arbeit: W F ds W M d ds dW d dW P F F v Leistung: Leistung: P M M dt dt dt dt 1 1 Bewegungsenergie: Etrans m v 2 Bewegungsenergie: E rot J 2 2 2 Prof. Dr. U. J. Schrewe, Physik I: Formelsammlung - 2012 Seite 1 Hochschule Hannover Fakultät II Maschinenbau und Bioverfahrenstechnik Vorlesung: Physik I Formelsammlung ---------------------------------------------------------------------------------------------------------Federkonstante: Federkraft: Verformungsarbeit: Haftreibungszahl: Haftreibungskraft: Gleitreibungskraft: Rollreibungskraft: Feder- Drehfederkräfte, elastische Verformungsarbeit D Winkelrichtgröße: Fel D s Drehfedermoment: 1 Wel D s 2 Verformungsarbeit: 2 H Reibungskräfte, Reibungsarbeit Gleitreibungszahl: G FH ,max H FN FG G FN FR R FN D* M el D* 1 Wel D * 2 2 Rollreibungszahl: R Gleitreibungsarbeit: WG FG s G FN s Rollreibungsarbeit: WR FR s R FN s Gravitationskräfte, potentielle Energie im Gravitationsfeld Gravitationskonstante: G = 6,67 10-11 N m2 kg-2 M m M m Gravitationskraft: potentielle Energie: E (r ) G Fg G 2 r r Erdradius: RE Erdbeschleunigung: g = 9,81 m s-2 Masse der Erde: ME M Gewichtskraft: Fg m G 2E m g potentielle Energie: E (h) m g h RE Fehlen äußere Kräfte: F i 0 i gilt Impulserhaltung: p i Erhaltungssätze Fehlen Drehmomente: konst. gilt Drehimpulserhaltung: i M i i 0 L i konst. i In einem System mit konservativen Kräften bleibt die mechanische Energie erhalten: kin kin E ges E pot Etrans E rot In einem System mit nicht-konservativen Kräften (z.B. Reibungskräften) geht ein Teil Q der mechanischen Gesamtenergie verloren (z. B. in Wärme oder Verformungsenergie): kin kin E ges E pot Etrans E rot Q Wirkungsgrad: E ges Q E ges Wnutz E ges Anwendungen Wird ein Körper der Masse M um eine Achse gedreht, deren Abstand zum Schwerpunkt h ist, gilt: J ges M h 2 J S , wobei JS das Trägheitsmoment bezüglich des Schwerpunktes bezeichnet (Steinerscher Satz). Trägheitsmoment geometrischer Körper: J k mr2 Hohlzylinder (Ring): k = 1, Vollzylinder (Scheibe): k = 1/2, Vollkugel: k = 2/5, Hohlkugel: k = 2/3 dünner Stab mit Drehpunkt Mitte: k = 1/12, dünner Stab mit Drehpunkt Ende: k = 1/3, Trägheitsmoment flacher Körper (Ausdehnung in x- und y-Richtung): J z J x J y Prof. Dr. U. J. Schrewe, Physik I: Formelsammlung - 2012 Seite 2 Hochschule Hannover Fakultät II Maschinenbau und Bioverfahrenstechnik Vorlesung: Physik I Formelsammlung ---------------------------------------------------------------------------------------------------------Trägheitskräfte im beschleunigten Bezugssystem: FTr ma v2 FZf m r FCor 2 m vr Trägheitskraft: Zentrifugalkraft: Corioliskraft: Geschwindigkeit zum Zeitpunkt t = 0: Geschwindigkeit zum Zeitpunkt t: Ausströmungsgeschwindigkeit: Raketengleichung: v0 Masse zum Zeitpunkt t = 0: m0 v (t ) Masse zum Zeitpunkt t: m(t ) u aus m v (t ) u aus ln 0 v0 m(t ) Zentraler elastischer Stoß: Vor dem Stoß: Geschwindigkeit der Masse m1 ist v1 , Geschwindigkeit der Masse m2 ist v 2 . Nach dem Stoß: Geschwindigkeit der Masse m1 ist u1 , Geschwindigkeit der Masse m2 ist u 2 . 2m 2 2m1 m m2 m m1 u1 u2 v1 2 v2 v2 1 v1 m1 m2 m1 m2 m1 m2 m1 m2 Zentraler vollkommen unelastischer Stoß: Vor dem Stoß: Geschwindigkeit der Masse m1 ist v1 , Geschwindigkeit der Masse m2 ist v 2 . Nach dem Stoß: Geschwindigkeit der Masse m1 ist u , Geschwindigkeit der Masse m2 ist u . m2 m1 v1 v2 m1 m2 m1 m2 Verformungsarbeit beim vollkommen unelastischen Stoß: u WQ 1 1 1 m 1 v 12 m 2 v 22 m 1 m 2 u 2 2 2 2 m2 p1 p 2 m1 1 2 E kin WQ E kin 1 1 m1 m2 m1 m2 m1 m2 W Q Gleiten: Rotieren: Rollen: Gleiten, Rotieren, Rollen v (r ) v (r ) v S Geschwindigkeit des Schwerpunktes: v ( r ) v ( r ) Geschwindigkeit des Schwerpunktes: v Kontakt 0 Geschwindigkeit des Schwerpunktes: Rollen: Verschiebung des Schwerpunktes: Rollen: Beschleunigung des Schwerpunktes: vS vS vS sS aS 0 R R R Prof. Dr. U. J. Schrewe, Physik I: Formelsammlung - 2012 Seite 3 Hochschule Hannover Fakultät II Maschinenbau und Bioverfahrenstechnik Vorlesung: Physik I Formelsammlung ---------------------------------------------------------------------------------------------------------------------------Formelzeichen und Einheiten a Beschleunigung 1 m s-2 D Federkonstante 1 N m-1 D* Winkelrichtgröße 1 kg m2 s-2 E F Energie 1 J = 1 N m = 1 kg m2 s-2 Kraft 1 N = 1 kg m s-2 g Erdbeschleunigung 9,81 m s-2 G Gravitationskonstante 6,67 10-11 N m2 kg-2 J L Trägheitsmoment 1 kg m2 Drehimpuls 1 kg m2 s-1 m M Masse 1 kg Drehmoment 1 kg m2 s-2 n Drehzahl 1 s-1 N p Zahl der Umdrehungen Impuls 1 kg m s-1 P Leistung 1 J s-1 = 1 N m s-1 = 1 kg m2 s-3 Q Wärmeenergie 1 J = 1 N m = 1 kg m2 s-2 r s Radius 1m Verschiebung 1m t Zeit 1s T v Umdrehungszeit 1s Geschwindigkeit 1 m s-1 W Arbeit 1 J = 1 N m = 1 kg m2 s-2 Winkelbeschleunigung 1 s-2 Wirkungsgrad H Haftreibungszahl G Gleitreibungszahl R Rollreibungszahl Drehwinkel Winkelgeschwindigkeit 1 s-1 Prof. Dr. U. J. Schrewe, Physik I: Formelsammlung - 2012 Seite 4