Lindner
Werbung

6.3
Rotationsenergie
6.3
Rotationsenergie
99
Bei der Einführung des Energiebegriffs war kein besonderer Unterschied gemacht worden
zwischen der Energie eines Massenpunkts oder der eines Objekts mit räumlicher Ausdehnung. Tatsächlich läßt sich aber ein beliebiger Körper gedanklich in lauter einzelne Massenpunkte zerlegen, von denen jeder seinen Beitrag zur Gesamtenergie des Körpers leistet.
Setzt man z. B. die potentielle Energie eines beliebigen Körpers mit der Gesamtmasse m
im homogenen Schwerefeld als E pot = mgh an, so ist dies nur näherungswejse richtig, da
sich der Abstand h auf einen bestimmten Ort bezieht. In einem späteren Abschnitt wird
gezeigt werden, daß der Schwerpunkt eines Körpers ein solcher "Ersatzpunkt" sein kann.
Ist aber das Kraftfeld inhomogen, wie es das Schwerefeld strenggenommen ist, wird die
Sache schon schwieriger.
Ähnlich verhält es sich mit der Bewegungsenergie. Solange jeder Massenpunkt eines Körpers die gleiche Bewegung mit derselben Geschwindigkeit durchführt, ist die Bewegungsenergie eines Körpers korrekt durch den Ausdruck Ekin = ~mv2 wiedergegeben. Ein
ausgedehnter Körper kann aber neben der Translationsbewegung auch eine Rotationsbewegung besitzen. In diesem Fall sind die Bewegungen der einzelnen Massenpunkte zwar
noch ähnlich - sie bewegen sich alle auf Kreisbahnen um die Drehachse -, aber ihre Bahngeschwindigkeiten sind i. allg. verschieden. Trotzdem ist es möglich, die Energiebeiträge
der einzelnen Massenpunkte zu einem übersichtlichen Ausdruck zusammenzufa en.
1
1
1
1
1
1
1
r·
~
: m
. . --r-.
. .,
i
1
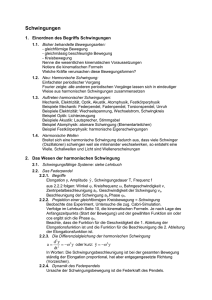
Bild 6.3: Zur Berechnung der Bewegungsenergie eines Drehkörper
Betrachten wir einen solchen ausgedehnten Körper, bei dem ein beliebiger herausgegriffener Massenpunkt, mit einem Abstand rj zur Drehachse, die Bahnge chwindigkeit Vi
besitze (Bild 6.3). Die kinetische Energie dieses einzelnen Massenpunkts i t wie oben
Elein =
v;' Die gesamte Bewegungsenergie des Körpers ergibt sich al Summe au
den Einzelenergien :
imi
Ekin
=
L
Ekin,i
=
~ Lmi v;
i
i
Eines aber haben alle Massenpunkte gemeinsam: Sie drehen ich mit der eiben Winkelgeschwindigkeit w ! Ersetzt man die Bahngeschwindigkeiten durch die Ausdrücke Vi = riW,
so erhält man schließlich:
Ebn =
H~mirl)
{U2
6
100
Energie
Der in der Klammer stehende Ausdruck ist nur noch von der geometrischen Verteilung der
Massenpunkte in bezug auf die Drehachse abhängig und wird Massenträgheitsmoment
oder einfach Trägheitsmoment J genannt.
Massenträgheitsmoment eines Körpers
bezüglich einer Drehachse
[J]
= kg· m2
(6.10)
(Kilogramm mal Quadratmeter)
Mit Hilfe dieser neuen "Trägheitsgröße" lautet dann die Bewegungsenergie des rotierenden
Körpers, die auch Rotationsenergie genannt wird,
E rot
=
1
-lu}
2
Rotationsenergie eines Körpers
(6.11)
In formaler Hinsicht besteht zwischen der Bewegungsenergie eines Massenpunkts und der
Translationsenergie eines Körpers eine vollkommene Übereinstimmung. An Stelle der "trägen Masse" taucht eine Größe auf, die von der Verteilung der Massenpunkte abhängt. Die
Bahngeschwindigkeit v ist ersetzt durch die Winkelgeschwindigkeit w. Die Rotationsenergie hängt quadratisch von der Winkelgeschwindigkeit ab, ebenso wie die Translationsenergie von der Bahngeschwindigkeit.
Grundsätzlich erlaubt Gleichung (6.10) die Berechnung eines Massenträgheitsmoments
durch einfache Summation. Das Verfahren eignet sich aber mcht so gut, wenn die einzelnen
Massenpunkte sehr dicht, also nahezu kontinuierlich, verteilt sind, wie es z. B. für feste homogene Stoffe zutrifft. In diesem Fall wird die diskrete Summation durch eine Integration
ersetzt:
L mi r; ----+ ! r dm
2
1
v
Die Integration enolgt dabei über das gesamte Volumen des Körpers. An Stelle der Masse
m läßt sich auch das Volumen V als Integrationsvariable verwenden. Mit Hilfe der Beziehung m = Q V lautet dann der Ausdruck für die Berechnung des Massenträgheitsmoments:
Massenträgheitsmoment eines Körpers
bei kontinuierlicher MassenverteiJung
Ist zudem die Massenverteilung des Körpers homogen, so läßt sich noch die Dichte
da Integral ziehen.
(6.12)
Q
vor
Berechnung des Massenträgheitsmoments eines homogenen Kreiszylinders in bezug auf seine
Achse. Der Zylinder wird zweckmäßig in konzentrische dünnwandige Hohlzylinder von der Masse
dm zerlegt (Bild 6.4). In dem allgemeinen Ansatz (6.12) muß dm al Funktion von rausgedrückt
werden. Der elementare HohJzylinder hat die Mas e dm = Qd V = 2nthQ ·dr (Q Dichte, V Volumen,
6.3
Rotationsenergie
101
Einige Massenträgheitsmomente
Körper
Lage der Drehachse
dünner Kreisring (Radiu r)
Ringmitte, senkrecht zur Ringebene
dünner Stab (Länge l)
Stabmitte, senkrecht zum Stab
desgl.
Stabende, senkrecht zum Stab
Kreisscheibe (Radiu r)
enkrecht durch die Mitte der Scheibe
desgl.
längs des Durchmessers
Vollzylinder
Längsachse des Zylinders
Rechteck (Diagonale d)
senkrecht durch die Flächenmitte
desgl. (Seiten a, b)
längs der Seite b
Vollkugel (Radius r)
durch den Mittelpunkt
dünnwandige Hohlkugel (Radius r)
desgl.
Massenträgheitsmoment J
mr 2
m
12
m 2
-l
3
m 2
-r
2
m 2
-r
4
m 2
-r
2
m d2
12
,2
m 2
-a
3
2m 2
-r
5
2m 2
-r
3
h Höhe des Zylinders, dr Wanddicke). Nunmehr wird das bestimmte Integral zwischen den Grenzen
r = 0 und r = R berechnet:
R
J = 2rre h
f
3
r dr
=
ne hR4
2
o
Mit der Gesamtmas e de Zylinders m
= eR2rrh folgt
mR 2
J=-2-
Da die elementaren Mas enanteile als Produkt mit dem Quadrat ihre jeweiligen Abstandes
von der Achse in die Berechnung eingehen, ist das Mas enträgheitsmoment eine Größe,
die sehr stark von der räumlichen Verteilung der Gesamtmasse rings um die Drehach e
abhängt. Das Ma enträgheit moment richtet sich daher nicht nur nach der geometri ehen
Form des vorliegenden Körpers, ondern vor allem nach der Lage der Drehachse.
In der Übersicht (s.o.) sind die Ergebnisse für einige häufig vorkommende, einfach geformte Körper aufgeführt.
Bei komplizierten Körpern, die sich au einzelnen geometrisch einfach gestalteten Teilen
zusammensetzen, bildet man die Summe aus den einzelnen Trägheitsmomenten:
Das gesamte Massenträgheitsmoment eines Körpers ist gleich der Summe der
Massenträgheitsmomente seiner einzelnen Teile in bezug auf dieselbe Achse.
6
102
Energie
Um z. B. das Massenträgheitsmoment eines Schwungrades zu berechnen, werden daher
zunächst die Massenträgheitsmomente der Nabe (Hohlzylinder) , der Speichen (Stäbe) und
des Kranzes (Hohlzylinder) ermittelt und diese dann addiert.
dr
Bild 6.5: Hohlzylinder
Bild 6.4: Zur Berechnung des Trägheitsmomentes eines Kreiszylinders
Hierbei kommt das Massenträgheitsmoment eines Hohlzylinders vor. Faßt man diesen als einen Vollzylinder auf, aus dem das Innere herausgeschnitten ist, so erhält man (Bild 6.5):
Der vor dem Bruch stehende Ausdruck ist aber die Gesamtmasse m. Damit wird
J = m
r
2
2
+
r
1
2
Massenträgheitsmoment eines
Hohlzylinders
2
(6.13)
Beispiele:
l. Für einen Vollzylinder von 20 cm Radius und 50 kg Masse berechnet sich das Massenträgheitsmoment zu
J
=
mr 2
-2
=
50 kg . 0 22 m 2
2
'
= I ' 0 kg . m 2
2. Welche Rotationsenergie hat ein Schwungrad, dessen Massenträgheitsmoment 5,0 kg . m 2 beträgt,
bei einer Drehzahl von 5 000 11min?
Mit Cl) = 2nn wird
EroL
JCl)2
J
- 2 = -.
(2nn)2 = 2n 2 Jn 2
2
2
5000)2
2n . 5,0 kg . m 2 ( - 60 s
= 6, 85 . 105 kg . m 2 /s 2 = 0, 69 MJ
Schwingungen und Wellen
Unter den in Natur und Technik vorkommenden Bewegungsabläufen gibt es einen Typ, der
verhältnismäßig häufig in Erscheinung tritt und von großer Bedeutung ist: die Schwingung.
Darunter versteht man einen Vorgang, bei dem ein einzelner Massenpunkt oder auch ein
au gedehnter Körper räumlich begrenzte Bewegungen um eine mittlere Lage durchführt.
In vielen Fällen ist dieser Bewegungsablauf periodisch, d. h., bestimmte Schwingungszustände wiederholen sich nach einer charakteristischen Zeitdauer.
Schwingungen werden durch Einwirkung von Kräften in Gang gesetzt und aufrechterhalten. Ist der betrachtete schwingende Massenpunkt oder Körper Teil eines mechanischen Systems, in dem innere Wechselwirkungen diesen Zustand auch nach Abschalten der schwingungsauslösenden äußeren Kräfte ermöglichen, so nennt man dieses System auch einen
Oszillator. Ein einfaches Beispiel für einen solchen Oszillator ist eine Masse, die mit einer Schraubenfeder verbunden ist. Nach Auslenkung der Masse führt das sich selbst überlassene System näherungsweise periodische Schwingungen durch, ohne daß eine äußere
Kraft vonnöten wäre. Von technischem Interesse ist jedoch gerade das Verhalten solcher
Oszillatoren unter der Einwirkung äußerer Kräfte, sei es, um den Schwingungsvorgang zu
kontrollieren oder Aufschluß über das Systemverhalten zu gewinnen.
Besteht das schwingungsfähige Gebilde aus vielen, durch innere Kräfte miteinander verkoppelten einzelnen Massen, so können sehr vielfältige Schwingungsformen entstehen. Die
Karosserie eines Fahrzeugs z. B. kann an einzelnen Stellen ausgeprägt schwingen, an anderen wiederum überhaupt nicht. Die Koppelung der vielen Oszillatoren hat nicht nur zur Folge, daß im Gleichgewicht nur ganz bestimmte Schwingungszustände des Gesamtsystems
möglich sind, sondern sie bewirkt auch, daß eine Änderung des Schwingungszustands an
einem Oszillator, z. B. durch lokale Krafteinwirkung, sich mit einem charakteristischen
Zeitverlauf auf alle Oszillatoren des Systems auswirkt. Der diese raumzeitliche Zustandsänderung des ausgedehnten Systems auslösende Vorgang wird als Welle bezeichnet.
Schwingungen und Wellen sind nicht begrenzt auf mechanische Systeme. Auch durch die
Verschaltung elektromagnetischer Bauelemente können schwingungsfähige Gebilde entstehen. Einfachstes Beispiel für einen elektromagnetischen Oszillator ist ein Schwingkreis
aus einer Induktivität und einer Kapazität. Elektromagnetische Wellen schließlich beschreiben die Ausbreitung von Schwingungszuständen elektrischer und magnetischer Felder,
können also auch im Vakuum präsent sein. Viele Phänomene mechanischer Schwingungen und Wellen lassen sich auch bei elektromagnetischen beobachten, was in bezug auf die
mathematische Behandlung ein einheitliches Verfahren ermöglicht. Die folgenden Ausführungen beschränken sich auf mechanische Systeme, sind jedoch mit Einschränkungen auch
auf andere phy ikalische Objekte anwendbar.
182
11
Kinematik chwingender Körper
11 Kinematik schwingender Körper
Form und Verlauf von Schwingungen können außerordentlich vielfältig ein. Wie bei jeder
Bewegung ist auch hier eine erste Klassifizierung nach dem Raum-Zeit- Verhalten möglich.
Dabei i t zunächst fe tzulegen, wie viele unabhängige Koordinaten zur Beschreibung der
Bewegung erforderlich sind. Bei nur einem Massenpunkt sind dies höch tens drei Koordinaten, für jede Raumrichtung eine. Bei einern System aus N Ma senpunkten ind dies
ent prechend maximal 3N Koordinaten oder, wie man auch sagt, Freiheitsgrade. Im folgenden wird zunächst nur das Verhalten eines einzelnen Massenpunkt betrachtet.
Die Festlegung de Bezugssy tems zur kinematischen Beschreibung eine Schwingungsvorgang erfolgt üblicherweise so, daß der Ursprung des Bezug systems mit der mittleren
Lage, die gewissermaßen der Ruhelage des Körpers ent pricht, übereinstimmt. Die entsprechenden Koordinaten ind die Auslenkungen oder Elongationen des Mas enpunkts oder
Körper.
Hinsichtlich des zeitlichen Ablaufs lassen sich zunächst zeitlich begrenzte und unbegrenzte Schwingungen unterscheiden. Ist speziell die Zeitdauer einer begrenzten Schwingung klein gegenüber der Beobachtungsdauer, so spricht man auch von einer impulsjörmigen Schwingung oder kurz einern Impuls (Bild 11.1).
T
x
x
r
t
Bild 11.1: Impul schwingung
Bild 11.2: Pulsschwingung: die Schwingungsdauer r
i t kleiner a1s dje Periodendauer T
Bei periodisch ablaufenden Schwingungen gilt für jede Auslenkungskoordinate:
I x(t) = x(t + T) I
Periodizität der Auslenkungsfunktion
( 11.1)
x(t) i t der Momentanwert der Auslenkung in x-Richtung zum Zeitpunkt t. T ist die Pe-
riodendauer der Schwingung. Den Kehrwert von T nennt man auch die (Perioden-)Frequenz der Schwingung:
Frequenz einer Schwingung
( 11.2)
Eine periodi che Schwingung, bei der die Au lenkung nur innerhalb eine Zeitabschnitt
r < T v n nun ver chiedene Werte annimmt, nennt man auch Pulsschwingung oder Puls
Bild 11.2).
11.1
Die harmonische Schwingung
11.1
Die harmonische Schwingung
183
Einen Sonderfall unter den periodischen Schwingungen teIlt die harmonische oder Sinusschwingung dar, bei der die Auslenkung eine sinusförmige Zeitabhängigkeit aufweist. Betrachten wir zunächst nur Schwingungen mit einem Freiheitsgrad, d. h., der Massenpunkt
bewegt sich auf einer geraden Bahn. Wählt man das Bezugssystem so, daß diese Gerade
z. B. mit der y-Achse zusammenfällt, so gilt für die Auslenkung y des Ma enpunkts:
Auslenkungsfunktion bei der linearen
harmonischen Schwingung
(11.3)
Der Faktor y entspricht der Maximalauslenkung und wird Amplitude (der Auslenkung)
genannt. ({JO ist der Nullphasenwinkel. Er bestimmt zum Zeitpunkt t = 0 s die Au lenkung. Das Argument der Sinus-Funktion ist der Phasenwinkel ({J:
Phasenwinkel bei der harmonischen
Schwingung
(11.4)
Sein Wert legt die Auslenkung zu einem beliebigen Zeitpunkt t fe t. Die Periodizität der
Schwingung ergibt sich aus dem Verhalten des Pha enwinkels. Ersetzt man t in (11.4)
durch t + T, so erhält man ({J(t + T) = ((J(t) + 2n und wegen in(({J + 2Jt) = in ({J
schließlich y(t + T) = y(t).
Schwingungszustände, deren Phasenwinkel sich um Vielfache von ±2n unter cheiden,
werden als gleichphasig bezeichnet.
An Stelle der Periodendauer läßt sich der Phasenwinkel auch durch die Frequenz! au drücken: ({J = 2Jt!t + ({JO. Das Produkt aus der Zahl 2Tt und der Frequenz fit die Kreisfrequenz w und dient der Vereinfachung der Schreibweise.
Kreisfrequenz
( 11.5)
Damit lautet (11.3)
I y(t) = y sin(w t + ({JQ) I
Auslenkungsfunktion
(11.6)
Der Name Kreisfrequenz deutet auf eine Beziehung zwi chen der harmoni chen Schwingung eines Massenpunkts und einer gleichförmigen Krei bewegung hin. Tat ächlich entpricht (11.6), bis auf den Nullphasenwinkel, der y-Koordinate des Radiu vektor in der
Polarkoordinatendarstellung von Gleichung (2.36). Dies geht auch an chaulich au Bild
11.3 hervor, in dem der Radiusvektor als rotierender Zeiger und die y-Koordinate al Projektion der Zeiger pitze auf den enkrechten Durchme er darge tellt i t. Die Länge de
Zeigers, d. h. der Betrag von
i t zugleich die Amplitude der Au lenkung. Um nun die
Abhängigkeit der momentanen Au lenkung y von der Zeit t aufzuzeigen, wird die Zeitache in die Richtung de waagerechten Durchme er gelegt, und es werden die den einzelnen
r,
184
11
Kinematik chwingender Körper
Bild 11.3: Ort-Zeit-Funktion der harmonischen Schwingung
Zeitpunkten entsprechenden Auslenkungen als Ordinaten aufgetragen. Die Verbindungslinie aller erhaltenen Punkte ergibt eine Sinuskurve.
Die Kreisfrequenz w der Schwingung entspricht der Winkelgeschwindigkeit, die Periodenfrequenz f der Umdrehungsfrequenz bzw. der Drehzahl. Die sich entsprechenden Größen
sind in der folgenden Tabelle gegenübergestellt:
Gegenüberstellung der kinematischen Größen der Kreisbewegung
und der harmonischen Schwingung
Kreisbewegung
Symbol
Sinusschwingung
Symbol
Radius
r
Amplitude
y"
Koordinate
y
Auslenkung
y
Drehwinkel
cp
Phasenwinkel
cp
Umdrehungsfrequenz,
Drehzahl
n
Periodenfrequenz
f
Winkelgeschwindigkeit
cu
Kreisfrequenz
cu
Umdrehungsdauer
T
Periodendauer
T
Die Verwandtschaft zwischen der Kreisbewegung und der harmonischen Schwingung ermöglicht es auch, sofort die entsprechenden Zeitfunktionen für die Momentangeschwindigkeit v und die Momentanbeschleunigung a anzugeben. Sie sind identisch mit den Gleichungen für die y-Koordinaten der Vektoren v und Ci bei der gleichförmigen Kreisbewegung:
v
= yw cos(w t + <po) = fj cos(w t + ((Jo)
I a = -.9",2 sin(", t + Y'o) = -.1 sin(", t + ipQ)
Gesch windigkeit bei
der harmonischen
Schwingung
Beschleunigung bei
der harmonischen
Schwingung
(11.7)
(11.8)
Strenggenonunen müßten v und a jeweils mit dem Index y versehen werden, da es sich um Koordinaten handelt und nicht um Beträge. Soweit keine Verwechslung auftreten kann, wird im folgenden
auf diese Kennzeichnung verzichtet.
11.1
Die harmonische Schwingung
185
Vund a ind die Amplituden der Geschwindigkeit bzw. Beschleunigung, d. h. genauso wie
bei der Auslenkung deren positive Maximalwerte. v ist bei gegebener Amplitude
dagegen quadratisch von der Kreisfrequenz (j) abhängig.
a
y linear,
I v = wy I
Geschwindigkeitsamplitude
(11.9)
Ia = w y I
BescWeunigungsamplitude
(11.10)
2
Durch eine einfache Umformung wird der zeitliche Bezug zwischen den Momentanwerten
der Auslenkung und denen der Geschwindigkeit bzw. Beschleunigung sichtbar gemacht:
v = vcos(wt
+ C{Jo) = vsin (wt + C{JO + ~)
a = -G. sin(w t
+ C{Jo)
+ C{Jo + n)
= G. sin(w t
TI
Der Phasenwinkel der Geschwindigkeit ist demnach um - größer als derjenige der ent2
sprechenden Auslenkung. Man sagt dafür:
Die Geschwindigkeit eilt der Auslenkung um eine viertel Schwingung voraus.
Bei der Beschleunigung beträgt der Phasenwinkelunterschied n:
Die Beschleunigung eilt der Auslenkung um eine halbe Schwingung voraus.
Eine gemeinsame Darstellung des Zeitverlaufs aller drei Bewegungsgrößen verdeutlicht
die mathematischen Zusammenhänge (Bild 11.4):
..-.
..
,
,
,
..
• •
••
a ' -'
'(
,•
•
l-I
wt
I
'xI
"
,,
I
."
\.'
\ ,
._
I
•,
••
.
,. , •
,
•
I
--
Bild 11.4: Au lenkung y Geschwindigkeit
v und Be chleunigung a der harmonischen
Schwingung
In den NuLldurchgängen der Au lenkung erfährt der Massenpunkt keine Beschleunigung,
der Betrag der Geschwindigkeit dagegen ist dort jeweils maximal. In den Umkehrpunkten
ist die Geschwindigkeit null, dafür der Betrag der Beschleunigung maximal.
Auch die Überlagerung zweier oder mehrerer Sinus chwingungen gleicher Frequenz, aber
mit unterschiedlichen Nullphasenwinkeln ergibt wieder eine Sinusschwingung. Die läßt
sich anschaulich mit Hilfe de rotierenden Radiu vektor von Bild 11.5 zeigen. Zerlegt
11
186
7
Bild 11.5: Addition von Zeigern. Die Zeiger rj und r"2 erzeugen beim Rotieren die ent prechenden
Sinuskurven Y1 und Y2. Der resultierende Zeiger ergibt die Sinuslinie y. Jedem Schnitt l' .,. 3'
durch das Liniendiagramm entspricht eine bestimmte Stellung J ... 3 de im ganzen rotierenden
Zeigerdiagramms.
r
r1
r
man den Radiusvektor in zwei Teilvektoren und r2~ die beide mit gleicher Winkelgeschwindigkeit (=Kreisfrequenz) w rotieren, so ergibt die Summe der bei den Projektionen
Y1 und Y2 gerade die Projektion des Vektors
auf den senkrechten Durchmesser (Bild
11.5).
Dabei gilt:
= Ysin(w t + ({Ja) = Yl + Y2 = Yl sin(w t + ((JOl) + Y2 sin(w t + rp02)
Y
und ({J02 sind die Nullphasenwinkel der resultierenden Schwingung und der Teilschwingungen. Da alle drei Vektoren (Zeiger) sich mit derselben Winkelgeschwindigkeit
drehen~ ist die resultierende Amplitude y = Irl zeitlich konstant. Die Berechnung der
Amplitude y sowie des Nullphasenwinkels ({Ja erfolgt über die üblichen trigonometrischen
Beziehungen für Dreiecke. Für den Fall, daß beide Teilamplituden gleich groß sind, gilt
({JO, ({J01
und
"
Y
"
= YI
.
sm
rpo 1 -
2
rp02
Beispiele:
1. Welche Auslenkung zeigt ein schwingender Massenpunkt 3,0 ms nach Beginn der Schwingung
aus der Ruhelage, wenn die Amplitude 30 nun und die Frequenz 25 Hz beträgt?
Aus der Ruhelage heißt ({Ja = O. Mit (l1A) und (11.6) folgt
Y
= ysin211:/t = 30 mm·sin(2· TI· 25 s-1
·3,0· 1O- 3 s) = 30 mrn· 0, 454 = 13,6 mm
2. Mit welcher Geschwindigkeit eilt ein mit der Frequenz 12 Hz schwingender Massenpunkt durch
seine Ruhelage, wenn seine Auslenkungsamplitude SO mm beträgt?
Bei der Schwingung durch die Ruhelage i t der Betrag der Geschwindigkeit gleich seiner Amplitude,
d. h., mit (11.9) folgt
lvi
=
v=
wy
=
211:/y
= 2 . Jt ·12 s-1 .50.10- 3 m
= 3, 8 m/s
11.2 Zusammengesetzte Schwingungen
187
3. Wie groß ist im vorigen Beispiel die Beschleunigung bei einer momentanen Auslenkung von
20mm?
Mit (11.6) und (1l.8) folgt
Das negative Vorzeichen bedeutet, daß die Beschleunigung der Auslenkung entgegengesetzt gerichtet
ist.
4. Bei welchen Phasenwinkelunterschieden verstärken bzw. schwächen sich zwei Sinusschwingungen gleicher Frequenz maximal?
Aus Bild 1l.5 geht hervor, daß maximale Verstärkung bei einern Unterschied von 0 und ±2n Jt,
maximale Schwächung dagegen bei ± (2n - 1) Jt eintritt. Die resultierende Amplitude ist dann :h +h
bzw. Iy} - Y21·
11.2
Zusammengesetzte Schwingungen
Reale Schwingungen sind keine harmonischen Schwingungen. Bereits die Forderung nach
"Unendlichkeit", die eine Sinusschwingung auszeichnet, widerspricht den tatsächlichen
Gegebenheiten. Hinzu kommt, daß die allermeisten Schwingungen, wenn sie denn schon
"nahezu" periodisch verlaufen, komplizierte Zeitabhängigkeiten aufweisen. Trotzdem besitzt die harmonische Schwingung eine herausragende Bedeutung bei der Analyse, aber
auch der Darstellung solcher realer Schwingungen. Nehmen wir als Beispiel einen Lautsprecher, der von zwei unabhängigen Sinus generatoren gespeist wird. Solange die Au lenkungen der Membran nicht zu groß sind, der Lautsprecher sich also linear verhält, ent teht
die resultierende Schwingung einfach durch Addition der beiden Teilschwingungen.
Drei Sonderfälle sind dabei von besonderem Interesse:
- Die beiden Teilfrequenzen stimmen überein, d. h., h = !2. In diesem Fall ist die resultierende Schwingung, wie im letzten Abschnitt gezeigt wurde, wieder eine harmoni che
Schwingung.
- Die beiden Teilfrequenzen sind nur wenig verschieden, d. h., h ~ !2. Es entsteht eine
Schwingung mit periodisch an- und abschwellender Amplitude, eine sogenannte Schwe-
bung.
- Die beiden Teilfrequenzen bilden rationale Zahlenverhältnisse, d. h., es gilt
h = ~
/2
n2
mit nl und n2 als ganzen Zahlen. Nur für diesen Fall ist die zusammengesetzte Schwingung streng periodisch.
11.2.1
Schwebungen
Ein Beispiel für eine Schwebung ist in Bild 11.6 wiedergegeben.
Charakteristisch für eine Schwebung ist, daß der sinusförmige Verlauf der beiden Teilschwingungen noch zu erkennen ist; allerdings erwei t sich die Amplitude nicht mehr als
zeitlich konstant, sondern zeitlich veränderlich mit einer bestimmten Periodendauer, der
Schwebungsdauer Ts.
11
188
Kinematik schwingender Körper
x
Bild 11.6: Entstehung von Schwebungen aus zwei Schwingungen benachbarter Frequenz
Die Schwingung ist moduliert, wobei die Modulation durch den Hüllkurvenverlauf sichtbar gemacht wird. Dies läßt sich auch mathematisch leicht zeigen. Werden die Amplituden
der beiden Teilschwingungen wie in Bild 11.6 als gleich groß vorausgesetzt und die beiden
Nullphasenwinkel null gesetzt, so ist
Y
= Yl + Y2 = 511 (sin Wlt + sin W2t)
Diese Summe läßt sich nach einem Additionstheorem in ein Produkt umwandeln:
~ ( cos
Y = 2Yl
WI - W2 ) ( . WI
2
t
sm
+2 W2 t )
Der Hüllkurvenverlauf wird durch den ersten Faktor mit der Kreisfrequenz
Wi - W2
tlw
2
2
bestimmt.
Der zweite Faktor mit der Mittenkreisfrequenz W m =
Wl
+ W2 , d. h. dem arithmetischen
2
Mittel der beiden Teilfrequenzen, beschreibt die in der Amplitude modulierte Schwingung.
Die Hüllkurve hat Nullstellen in zeitlichen Abständen von Itlwi Ts
2
die Schwebungsdauer Ts zu
1
Ts=---
If1 - f21
Schwebungsdauer
=
Jt.
Daraus ergibt sich
(11.11)
Definiert man eine Schwebungsfrequenz fs als den Kehrwert der Schwebungsdauer, so
folgt
I fs =
*
=
1/1 -!zl
I
Schwebungsfrequenz
(11.12)
Sind die beiden Teilarnplituden nicht, wie oben vorausgesetzt, gleich groß, so be itzt die
Hüllkurve keine Nullstellen mehr, sondern nur noch Minima. Schwebungsdauer und -frequenz ind aber eben 0 durch die beiden Gleichungen bestimmt.
11.2
Zusammengesetzte Schwingungen
189
Schwebungen werden in der musikalischen Akustik gerne dazu verwendet, Instrumente zu
stimmen. Durch Vergleich eines Referenztons (Stimmton) mit dem zu justierenden Ton lassen sich Instrumente genau abgleichen, ein Verfahren, das - nicht nur in der Akustik, sondern auch bei elektromagnetischen Schwingungen - zur genauen Messung von Frequenzen
verwendet werden kann.
Beispiel:
Durch Überlagerung der Töne zweier Stimmgabeln, von denen eine durch Befestigung einer Zusatzmasse ein wenig verstimmt ist, entsteht eine Schwebung mit einer Dauer von 1,0 s. Mit welcher
Frequenz schwingt die verstimmte Stimmgabel, wenn die Frequenz der unverstirnmten Gabel 440 Hz
beträgt?
I
1
Aus (11.12) folgt Ifl - f21 = - = - - = 1,0 l/s . Da die schwingende Masse der verstimmten
TS
1,0 s
Gabel um die Zusatzmasse größer ist, gilt (s. auch (12.3)) f2 = (440 - 1) Hz = 439 Hz.
11.2.2 Allgemeine periodische Schwingungen
Wie bereits oben erwähnt wurde, führt nur die Überlagerung zweier Sinusschwingungen
mit rationalem Frequenzverhältnis zu einer resultierenden Schwingung mit zeitlich periodischem Verlauf. Zum Beweis betrachten wir die beiden Phasenwinkel der beiden Teilschwingungen
und qJ02 sind die Nullphasenwinkel. Eine Periodizität der zusammengesetzten Schwingung setzt auch die Periodizität der Einzelschwingungen voraus, d. h., e muß gelten
({JOl
mit T als der Periodendauer der Ge amtschwingung und nl und n2 als ganzen Zahlen.
Daraus folgt für das Verhältnis der Frequenzen
Frequenzverhältnis bei periodischen
Schwingungen
(11.13)
Weiterhin folgt aus dieser Überlegung:
Die Periodendauer der Gesamtschwingung ist das kleinste gemeinsame Vielfache der Periodendauern der beiden Teilschwingungen, oder äquivalent: Die
Frequenz der Gesamtschwingung ist der größte gemeinsame Teiler der beiden
Teilfrequenzen.
Zwei Beispiele für eine solche Überlagerung von zwei Teil chwingungen sind in Bild 11.7
und Bild 11.8 wiedergegeben.
In der musikalischen Akustik bezeichnet man den Ab tand zwischen zwei Tönen al Intervall. Besondere Bedeutung besitzen die Intervalle, die durch rationale Frequenzverhältni e gekennzeichnet
11
190
Kinematik chwingender Körper
~1\1\1\J)J\I\J\l\hl\.l\.J\'
V V V V V \TV \T\it v-V\J v
I
I
V\V\
I
~
Vi-V:\;
~~
o
!
,
--
o
D,2 tin s
0,1
Bild 11.7: Addition zweier Schwingungen im
Frequenzverhältnis 2 : 1
W!
I
"\fJiW
0,1
I
0,2
-
!in S
Bild 11.8: Überlagerung bei großem
Frequenzunter chied
sind. Sie bestimmen die in der Musik gebräuchlichen Tonsysteme. Als Oktave z. B. bezeichnet man
ein Intervall, dessen Töne im Verhältnis 2 : 1 stehen, als Quinte ein Intervall mit dem Verhältnis 3 : 2.
Selbstverständlich lassen sich auch mehr als zwei Teilschwingungen überlagern, wobei die
eben getroffenen Aussagen entsprechend zu erweitern sind. Das ganze läßt sich dahingehend verallgemeinern, daß eine solche Überlagerung in Form einer Reihe dargestellt wird:
00
Y =
LYn sin(ncul
t
+ 1{J01)
Harmonische Synthese
(11.14)
n=l
Man nennt diese Verfahren harmonische Synthese und die Reihe selbst Fouriersche
Reihe. Die einzelnen Summanden sind die Teilschwingungen. CUt ist die Kreisfrequenz
der Grundschwingung, d. h. der Teilschwingung mit der niedrigsten Frequenz. Alle anderen Teilschwingungen werden Oberschwingungen genannt. Die Frequenzen der Teilschwingungen sind ganzzahlige Vielfache der Frequenz der Grundschwingung. Dabei ist
nicht notwendig, daß die Amplitude dieser Grundschwingung ungleich null ist, d. h. diese
Schwingung auch tat ächlich vorhanden ist.
Bei der Summation läuft die Ordnungszahl n von 1 bis 00, was bei einer endlichen Anzahl
von Teilschwingungen natürlich übertrieben ist. Die Amplituden der nicht vorhandenen
Teilschwingungen sind dann einfach null. Ganz anders kann es aber bei der Umkehrung
der harmonischen Synthese, nämlich der harmonischen Analyse, aussehen. In diesem Fall
wird eine beliebige periodische Schwingung in Teilschwingungen zerlegt. Eine solche Zerlegung ist durch die Angabe der Amplituden sowie der Nullphasenwinkel der Teilschwingungen vollständig bestimmt. Trägt man die entsprechenden Werte über die Frequenz oder
Ordnung zahl n auf, so erhält man ein Amplitudenspektrum (Bild 11.9) bzw. ein Phasenwinkelspektrum (BHd 11.10).
Ohne auf die Details der Bestimmung der SpektralkoefJizienten einzugehen, sei erwähnt,
daß mit Hilfe der harmonischen Analyse jede beliebige periodische Schwingung vollständig dargestellt werden kann. Im allgemeinen genügen wenige Teilschwingungen, um eine
Schwingung mit ausreichender Genauigkeit zu charakterisieren, jedoch können manchmal
auch viele Rechenschritte erforderlich sein. Das genannte Verfahren wird in der Technik
häufig eingesetzt.
11.2
Zusammengesetzte Schwingungen
191
({Jo
+n
A
Y
123456
1
234
5
6
n
Bild 11.9: Amplitudenspektrum einer
periodischen Schwingung
n
-n
Bild 11.10: Phasenwinkelspektrum einer
periodischen Schwingung
Jede periodische Schwingung läßt sich in eine im allgemeinen unendliche Reihe von harmonischen Teilschwingungen zerlegen. Die Frequenzen dieser Teilschwingungen sind ganzzahlige Vielfache einer Grundfrequenz.
Häufig wird die FOURIER-Reihenentwicklung auch in einer anderen, aber mathematisch äquivalenten
Form wiedergegeben:
y
aO
00
~
.
= 2 + L(an cosnw1t + bn smnwlt)
n=l
Andere DarsteUung der
Fourier-Reihe
(11.15)
Die Größen an und bn sind die FOURIER-Koeffizienten; der Summand aO/2 stellt eine Ver chiebung
des Schwingungsnullpunkts dar.
Das Verfahren der FOURJER-Reihenentwicklung zur Analyse von Schwingungen besitzt eine Verallgemeinerung, nUt der sich auch nichtperiodische Schwingungen analysieren lassen. Anders als beim
diskreten Frequenz- und Phasenwinke]spektrum der periodischen Schwingung sind die entsprechenden Spektren kontinuierlich, d. h., die Frequenzen der Teil chwingungen sind dann keine Vielfachen
der Frequenz einer Grundschwingung mehr. An Stelle der Summation über n erfolgt dann eine Integration über alle Frequenzen.
Beispiele:
1. Die Grundschwingung einer anharmonischen Schwingung habe die Frequenz 100 Hz. Die Oberschwingung mit der höchsten Frequenz Hege um 5 Oktaven über dieser Grund chwingung. Welche
Frequenz besitzt diese Oberschwingung?
Bei einer Oktave i t das Frequenzverhältnis der beiden Intervalltöne 2: 1, d. h., 5 Oktaven entsprechen
einem Verhältnis 2 S : 1. Die gesuchte Oberschwingung hat die Frequenz
f
= 2 S ·100 s - 1 = 32 · 100 - 1 = 3,20 kHz
2. Zwei harmonische Schwingungen mit den Frequenzen 100 Hz und 350 Hz werden überlagert. Wie
groß ist die Periodendauer der zusammengesetzten Schwingung?
. -12 = -350 = -.
7 D'le F requenz d er G run dsc h wlllgung
.
.
· b'd
el en F requenzen verha]
ten '
SICh WIe
Ist
D Je
11
]00
2
dann
f
350 s - l
= --7
1
100 s - 1 = 50 Hz. Entsprechend gl'1 t f ür d"le Peno
. den dauer
--2-1.s
.
T=-=-=20ms
f
50
11
192
Kinematik schwingender Körper
11.2.3 Schwingungen mit mehreren Freiheitsgraden
Bei der bisherigen Betrachtung von Schwingungen war der Zeitverlauf nur durch eine
Auslenkungsfunktion bestimmt, die Bahnkurve des schwingenden Objekts war eine Gerade. Ein einzelner Massenpunkt besitzt jedoch drei unabhängige Ortskoordinaten, d. h. drei
Freiheitsgrade der Bewegung, die auch drei gleichzeitig stattfindende Schwingungen um
den gemeinsamen Ursprung sein können. Als Beispiel soll das Verhalten eines Elektronenstrahls zwischen den Ablenkplatten der Katodenstrahlröhre eines Oszilloskops diskutiert
werden (Bild 11.11). Die beiden senkrecht zueinander stehenden Platten sollen an zwei separaten Wechselspannungsquellen variabler Frequenz und Phasenlage angeschlossen sein.
Jedes Elektron des Strahls führt eine Bewegung aus, die zusammengesetzt ist aus einer
Translation parallel zu den Ablenkplatten und zwei Schwingungen senkrecht dazu. Auf
dem Bildschirm der Röhre, der gewissermaßen die Projektionsebene der Elektronenbewegung ist, wird die zusammengesetzte Schwingung sichtbar gemacht.
y
x
Elektronenbahn
Bild 11.11: Bezugssystem für die Elektronenbewegung
in einer Katodenstrahlröhre
Abhängig von den Frequenzen und der Phasenlage der beiden Spannungsquellen ergeben
sich i. allg. komplizierte Bahnkurven, die sich zwei Gruppen zuordnen lassen: Bahnkurven,
deren Erscheinungsbild sich laufend ändert, und Bahnkurven, die geschlossenen Linienzügen entsprechen. Letztere Kurven werden nach ihrem Entdecker auch LISSAJOUs-Figuren
genannt. Voraussetzung für das Zustandekommen der LISSAJOUs-Figuren ist, daß die beiden Schwingungsfrequenzen, wie im Fall der periodischen Schwingung mit einem Freiheitsgrad, ein rationales Zahlenverhältnis bilden.
Legt man ein kartesisches Bezugssystem so in den Raum zwischen den Ablenkplatten, daß
die z-Achse mit der Translationsrichtung übereinstimmt, die x- und y-Achse senkrecht zum
horizontalen bzw. vertikalen Plattenpaar stehen (Bild 11.11), so lautet die Frequenzbedingung für geschlossene Bahnkurven also:
Frequenzbedingung für
Lissajous-Figuren
(11.16)
mit Ix und f y al den Frequenzen der Schwingungen in x- bzw. y-Richtung. n x und n y
ind ganze Zahlen.
(11.16) entspricht, abgesehen von den Bezeichnungen, Gleichung (11.13). Der Grund für
diese Überein timmung liegt darin, daß die Bahnkurve nur dann geschlossen ist, wenn jeder
Punkt auf der Kurve nach einer Periodendauer T wieder durchlaufen wird. Sind Tl und T2
die Periodendauem der beiden Teil chwingungen, so ist T wie im Fall der periodischen
11.2 Zusammengesetzte Schwingungen
193
eindimensionalen Schwingung das kleinste gemeinsame Vielfache von Tl und T2. Einige
Beispiele für LISS Al 0 U S- Figuren sind in Bild 11.12 wiedergegeben.
y
7T
LlIP- 0
"2
a)
31T
2
b)
Llp =
rr
0
T
Bild 11.12: Verschiedene LISSAJOUSFiguren; für das Frequenzverhältnis
der beiden Teilschwingungen gi It:
a) fx
fy
= ], b)
fx
fy
=~
2
Die einfachste geschlossene Kurvenform ist die einer Geraden. Sie entsteht, wenn die beiden Teilschwingungen gleiche Frequenzen haben und der Phasenwinkelunterschied 0° oder
180° beträgt. Die Steigung der Geraden ist positiv bei 0° und negativ bei 180°. Der Betrag der Steigung wird durch das Verhältnis der Au lenkung amplituden der beiden Tei1 schwingungen bestimmt. Grundsätzlich ist dieser Schwingungstyp nichts Neue, da durch
entsprechende Drehung des Koordinatensystems diese Schwingung auf einen Freiheitsgrad
reduziert werden kann.
Sind die Nullphasenwinkel der beiden Teilschwingungen nicht mehr gleich groß, so entsteht als Bahnkurve eine Ellipse, deren Lage wiederum durch den Pha enwinkelunterschied und das Amplitudenverhältnis bestimmt ist. Man spricht auch von einer elliptischen
Schwingung. Beträgt der Phasenwinkelunterschied speziell 90° und i t x = 0 für t = 0,
so ergeben sich für die Auslenkungen in x- und y-Richtung
x =
x sin wxt
y
= 51 sin ( w yt ± ~) = ±y co
wyt
.i, 51 sind die Auslenkungsamplituden, wx , w y die Kreisfrequenzen der bei den Teil chwingungen. Beide Auslenkungsfunktionen entsprechen der Parameterdarstellung einer Ellip e
in Normalform, d. h., die Koordinatenachsen und die beiden Halbachsen der Ellip e fallen zusammen. Das Vorzeichen der Funktion y(t) legt den Umlaufsinn de Ma enpunkt
(Elektrons) fest. Bei positivem Vorzeichen erfolgt eine Drehung im Uhrzeigersinn (vom
11
194
Kinematik chwingender Körper
Beobachter aus gesehen). Sind die beiden Au lenkung amplituden gleich groß, so entartet die Ellipse zu einem Kreis. Die Kreisbewegung eine Ma senpunkt läßt ich demnach
auch als zirkulare Schwingung interpretieren.
11.2.4 Drehschwingungen
Ein weiterer Sonderfall einer Schwingung ist die Drehschwingung. Hierbei handelt es
sich um eine periodi che Bewegung mit einem Krei bogen al Bahnkurve (Bild 11.13).
Beispiel wei e führt eine Masse, die über einen Faden mit einem Drehlager verbunden
ist, bei Au lenkungen im Schwerefeld oIehe Drehschwingungen durch ( . auch nächsten
Abschnitt) .
y
I
I
I
I
I
I
I
I
I
I
I
/
/
x
Bild 11.13: Zur Kinematik: von Drehschwingungen. Der Drehwinkel1/! ersetzt die Koordinaten x und y.
Im kartesischen Koordinatensystem sind zur Beschreibung dieser Bewegung zunächst zwei
Koordinaten, d. h. eigentlich zwei Freiheitsgrade, erforderlich. Geht man aber zu Polarkoordinaten über, so zeigt sich, daß tatsächlich nur eine Koordinate, der Drehwinkel 1/1, von
Bedeutung ist, da der Radius r zeitlich konstant ist. Ist speziell diese Schwingung wieder
harrnoni ch, so lautet die ent prechende Auslenkungsfunktion
1* = ,fr sin(", t + «Jo) 1
Auslenkungsfunktion bei der
harmonischen Drehschwingung
(11.17)
An Stelle der bei Polarkoordinaten üblichen Bezeichnung cp für den Drehwinkel wurde
hier das Symbol 1/1 verwendet, um Verwechslungen mit dem Phasenwinkel zu vermeiden.
,fr ist die Amplitude des Drehwinkels, d. h. sein Maximalwert. Völlig analog zur linearen
Schwingung ergeben sich auch die Winkelgeschwindigkeit sowie die Winkelbeschleunigung:
Winkelgeschwindigkeit bei der
harmonischen Drehschwingung
Winkelbeschleunigung bei der
harmonischen Drehschwingung
(11.18)
(11.19)
Ebenfalls wegen der Verwechslungsgefahr mit der Kreisfrequenz wurde auf die sonst übliche Bezeichnung w für die Winkelgeschwindigkeit verzichtet.
12.1
Der freie harmonische Oszillator
195
12 Dynamik schwingender Körper
12.1
Der freie harmonische Oszillator
Das einfachste schwingungsfähige System besteht aus einer trägen Masse, die unter der
Einwirkung einer "rückstellenden" Kraft nach einmaligem Anstoßen harmonische Schwingungen ausführt. Die träge Masse kann auch ein Massenträgheitsmoment sein, das durch
ein Drehmoment gesteuert wird. Bekannte Beispiele für solche Systeme sind ein einfaches
Feder-Masse-Pendel (Bild 12.1) oder das im letzten Abschnitt erwähnte Schwerependel,
bei dem eine Masse Drehschwingungen im Schwerefeld der Erde durchführt.
Bild 12.1: Feder-Masse-Oszillator
Was sind die Voraussetzungen für die Kraft bzw. das Drehmoment, um eine oIehe harmonische Schwingung zu ermöglichen?
12.1.1
Lineare Federschwingung
Betrachten wir zunächst wieder den Fall der linearen Schwingung mit einem Freiheitsgrad.
Die Zeitabhängigkeit der Beschleunigung der schwingenden Masse wurde in (11.8) hergeleitet. Ersetzt man die Sinus-Funktion in (11.8) durch die Auslenkungsfunktion, 0 erhält
man folgenden Zusammenhang zwischen Beschleunigung und AusJenkung:
Beschleunigung beim linearen
Oszillator
(12.1)
Multiplikation von a mit der Masse m liefert die benötigte Kraft F:
Rückstellkraft bei der linearen
harmonischen Schwingung
(12.2)
Die zur Aufrechterhaltung der harmonischen Schwingung eines Massenpunkts
erforderliche Kraft ist der Auslenkung entgegengerichtet und proportional
zum Betrag der momentanen Auslenkung.
Eine Kraft mit dieser Eigenschaft hatten wir schon in Ab chn. 3.5 bei der linear-ela ti chen
Verformung einer Schraubenfeder kennengelernt. Der Proportionalitätsfaktor zwischen der
12
196
Dynamik chwingender Körper
Rück teilkraft der Feder und der Auslenkung wurde dort al Federkon tante c bezeichnet.
Durch Vergleich erhält man c = mw2 = mW5 bzw. nach der Krei frequenz wo aufgelöst
Kennkreisfrequenz eines
Feder-Masse-Systems
(12.3)
Da die Kreisfrequenz eine "Systemkon tante" i t - sie hängt nur von c und m ab -, wird
sie auch als Eigen- oder Kennkreisfrequenz wo bezeichnet.
Das Ergebnis läßt sich statt durch die Eigenfrequenz auch durch die Periodendauer der
Schwingung ausdrücken:
To =
2nj'ij
Periodendauer der harmonischen
Schwingung eines Feder-Masse-Systems
(12.4)
Die Periodendauer To der harmonischen Schwingung eines Feder-Masse-Systems
- i t unabhängig von der Auslenkungsamplitude 51,
- wächst mit zunehmendem Wert der trägen Masse m,
- fällt mit zunehmendem Wert der Federkonstanten c.
In der Praxis sind diese Zusammenhänge nur näherungsweise erfüllt. Abgeseben von der
unvermeidlichen Dämpfung, die zu einem ganz anderen Zeitverhalten der Schwingung
führt, ist ein harmonischer Oszillator kaum zu realisieren. Die Forderung nach einer strikten
Proportionalität zwischen Federkraft und Auslenkung ist allenfalls für kleine Auslenkungen erfüllt. Nur dann aber verhält sich das System linear. Nichtlinearitäten in dem Kraftgesetz führen zu einem komplizierten anharmonischen Schwingungs verhalten der Mas e, die
durch eine einfache Sinusfunktion nicht mehr beschrieben werden kann. Insbesondere die
Schwingungsdauer wird dann abhängig von der Auslenkungsamplitude.
Beispiele:
1. Ein PKW besitzt eine Eigenmasse von 1000 kg. Durch eine Zuladung von 380 kg senkt sich die
Karosserie um 80 mm. Wie groß ist die Kennfrequenz des PKW im beladenen Zustand?
Die Federung des PKW besitzt eine Federsteife von
F
c=
y=
380 kg . 9, 81 m
80. 10- 3 m. s2 = 46, 6 kN/m
Die Kennfrequenz mit Zuladung ist
10
1
= 2n
ff
1
- = m
2· n
46, 6 . 103 N
=0,925Hz
1380 kg· m
2. Eine Schraubenfeder wird einmal mit einem Gewicht so belastet, daß die Feder gedehnt wird,
ohne daß es zu einer Schwingung kommt. Wie groß ist die maximale Auslenkung der Feder, wenn
das Gewicht an der ungedehnten Feder plötzlich 10 gelassen wird?
Die Auslenkungsamplitude der Schwingung entspricht der Auslenkung der Feder bei der nichtschwingenden Belastung. Die maximale Auslenkung der Feder ist daher doppelt so groß.
12.1
Der freie harmonische Oszillator
197
12.1.2 Drehschwinger
Eine zum Feder-Masse-System analoge Anordnung für Drehschwingungen erhält man,
wenn ein Rotationskörper, der um eine feste Achse drehbar ist, dem rückstellenden Drehmoment einer Schneckenfeder ausgesetzt ist.
Bild 12.2: Drehschwinger
Bei dem in Bild 12.2 gezeigten System wird die Kreisscheibe nach einer Drehung um die
vorgegebene Drehachse durch die verdrillte Feder beschleunigt. So wie die Rückstellkraft
der Feder proportional zur Auslenkung der Masse war, ist auch hier bei kleinen Drehungen
das Rückstellmoment häufig proportional zum Drehwinkel, d. h., es gilt
Rückstellmoment einer Schneckenfeder
(12.5)
D Direktions- oder Richtmoment (entspricht der Federkonstanten)
[D] = N . rn/rad
Drehmoment und Winkel in (12.5) sind vorzeichen behaftete Betragsgrößen. Bei einer Drehung um einen positiven Winkel (1/1 > 0) ist das entsprechende Drehmoment rechtsdrehend. Die Winkelbeschleunigung, die der Drehkörper erfährt, ergibt ich aus Gleichung
(8.10)
.. M
D
1/1 = - = --1/1
J
J
Winkelbeschleunigung beim
Drehschwinger
(12.6)
(12.6) entspricht formal Gleichung (12.1) für den linearen Feder-Masse-Oszillator.
Damit folgt die Auslenkung 1/1 ebenfalls einem Sinus-Verlauf, wie er in (11.17) bereits
quantitativ angegeben wurde. Die Kennkreisfrequenz des Drehschwingers erhält man sofort durch Vergleich:
Kennkreisfrequenz des Drehschwingers
(12.7)
Entsprechend ist die Periodendauer des Oszillators
Periodendauer des Drehschwingers
(12.8)
12
198
Dynamik schwingender Körper
Die beim Feder-Masse-System festgestellten Abhängigkeiten gelten auch hier, nur daß an
die Stelle der Masse das Massenträgheitsmornent und an die Stelle der Federkonstante das
Richtmoment tritt.
Die in (12.5) formulierte Proportionalität zwischen Rück tellmoment und Auslenkung
(Dreh winkel) ist näherung weise auch bei Körpern gegeben, die unter dem Einfluß der
Schwerkraft in Schwingung geraten. Beispiele für solche physischen Pendel oder Schwerependel sind ein aufgehängter Stab, ein hängendes Brett oder eine Schaukel.
Bild 12.3: Physisches Pendel
Bei dem in Bild 12.3 skizzierten Pendel ist der Schwerpunkt S um einen Abstand l gegenüber dem Drehlager 0 verschoben. Eine Auslenkung des Pendels aus seiner Gleichgewichtslage hat ein Drehmoment bezüglich des Drehlagers der Größe M = -mgl sin l/f
zur Folge. Für kleine Auslenkungen läßt sich die Sinusfunktion durch den Winkel ersetzen:
sin l/f ~ l/f. Damit gilt näherungsweise M ~ -mgll/f, d. h. aber, das Direktionsmoment D
lautet in diesem Fall
Direktionsmoment beim Schwerependel
(12.9)
Eingesetzt in Gleichung (12.8) ergibt dies für die Periodendauer des Schwerependels
To =
2nJ
J
mgZ
Periodendauer des Schwerependels
(12.10)
Ein Sonderfall eines Schwerependels liegt vor, wenn die Masse des Oszillators in seinem
Schwerpunkt lokali iert ist. Dann gilt für das Massenträgheitsmoment J = mZ 2 und für die
Periodendauer
TO =
2n/f
Periodendauer beim mathematischen Pendel
(12.11)
Sie hängt ausschließlich vom Abstand der Ma se vom Drehlager und der Fallbeschleunigung ab.
Drehschwingungen eignen sich sehr gut zur experimentellen Bestimmung von Mas enträgheitsmomenten. Eine Möglichkeit besteht darin, den Körper, dessen Trägheitsmoment
12.1
Der freie harmonische Oszillator
Bild 12.4: Ennittlung des Trägheitsmoments
einer Riemenscheibe
199
Bild 12.5: Ermittlung de Trägheitsmoments
ei ne Motorankers
ermittelt werden soll, so mit einer Aufhängung zu versehen, daß er möglich t frei um eine
Drehachse schwingen kann, die zu der gewünschten Achse parallel ist (Bild 12.4).
Die Versuchsdrehachse sollte dabei so gewählt werden, daß eine vernünftige Me ung der
Periodendauer ermöglicht wird. Mit Hilfe von (12.10) erhält man das Trägheit moment
bezüglich der Drehachse im Experiment und kann darau unter Verwendung de Satze
von Steiner (8.18) das Trägheitsmoment für jede beliebige parallele Drehach e berechnen.
Eine andere Möglichkeit der Ermittlung von J beruht darauf, den Körper an einem langen
Stahldraht aufzuhängen (Bild 12.5). Nach einer kleinen Verdrehung führt er dann Tor. ion schwingungen mit der Periodendauer T aus, für welche (12.8) gilt.
Bei Kenntnis des Direktionsmoments D ließe sich darau da Trägheit moment bezüglich
der gewählten Drehachse berechnen. Umgekehrt ist e natürlich möglich, D mit Hilfe eine
geeigneten bekannten Trägheitsmoments experimentell zu bestimmen.
Beispiele:
1. Für den in Bild 12.4 gezeigten rotation symmetrischen Drehkörper mit der Ma e 800 g oll das
Massenträgheitsmoment bezüglich der Symmetrieachse bestimmt werden. Hierzu wird der Drehkörper im Abstand I = 60 mm vom Schwerpunkt frei drehbar gelagert. Die Me ung der Periodendauer
ergibt Ta = 0, 60 s.
Aus (12.10) folgt
2
0 60 s2 ·0, 800 kg ·9, 81 m . 0, 060 m
4n 2
4n 2 . s2
Mit Gleichung (8.18) ergibt sich daraus für die Symmetrieachse
J
JS
= r 2 mgl =
=J
- mZ 2
=
=4
29 . 10-3 kg. m2
'
(4,29· 10- 3 - 0, 800 .0,0602 ) kg . m 2
=
1,41 . 10- 3 kg . m 2
2. Welche Länge muß ein Fadenpendel haben, damit eine halbe Schwingung genau 1 , dauert?
.
Aus Gleichung (12.11) folgt 1 =
pendels beträgt also rund 1 m.
--%
=
4n
gT,2
9, 81 m .4,0 s2
4 . Jt2 .
=0
994 m. Die Länge de Sekunden-
200
12 Dynamik chwingender Körper
12.1.3 Energiebilanz
Sowohl beim harmonischen Oszillator mit linearer Au lenkung al auch bei einem Oszillator, der Drehschwingungen ausführt, gilt der Energieerhaltungs atz. Darauf wurde auch
schon in Abschnitt 6.2 hingewiesen. Wie verhalten sich nun die beiden Energieanteile während eines Schwingungszyklus? Betrachten wir als Beispiel da Feder-Ma e-System. Für
die kinetische Energie gilt wegen (11.7)
Ekin
1 2 = -m
1 [A
]2
= -mv
YWO cos(wot + «Ja)
2
2
Die potentielle Energie folgt aus Gleichung (6.4), wobei die Auslenkung s durch Y zu
ersetzen ist:
Epot
1 2 1 [A .
2CY = 2C Y sm(wot
=
Mit Hilfe von c =
mW6 erhält man
1 m ["ywo sin(wot
E pot = 2
E
+ «Ja) ]2
+ «Ja) ]2
E kin
E pot
--f---~-I---/
"I;
I
I
\
\
nl2
3nl2
2n
rot
Bild 12.6: Zeitverlauf der Energie bei einer
harmonischen Schwingung
Potentielle und kinetische Energie unterscheiden sich demnach nur durch ihr Zeitverhalten.
Sie sind genau um einen Winkel von 90° phasenverschoben. In Bild 12.6 sind E pot und
Ekin in Abhängigkeit von der Zeit t aufgetragen, wobei als Anfangsbedingung für t = 0
maximale Auslenkung, d. h. Ekin = 0 gewählt wurde.
Zwischen potentieller und kinetischer Energie findet ein periodischer Wechsel statt, wobei
die Summe, wie sich leicht durch Addition der beiden Gleichungen nachprüfen läßt, immer
gleich groß bleibt. Die Schwingungen der beiden Energieformen erfolgen jedoch doppelt
so schnell wie die Schwingung der Masse.
12.2
Dämpfung
Die Auslenkungsamplituden eines einmal angestoßenen Pendels werden im Laufe der Zeit
stetig kleiner, bis das Pendel stehenbleibt. Die Ursachen sind die Reibung an der Aufhängung, der Luftwiderstand und die Energieabgabe an das Gesten, das stets ein wenig mitbewegt wird. So halten die Schwingungen einer Blattfeder, die fest in einen Schraubstock
gespannt ist, viele Sekunden lang an. In einer Fassung aus Gummi kommt sie schon nach
wenigen Schwingungsbewegungen zur Ruhe, eine Folge der starken Dämpfung.
12.2 Dämpfung
201
Bild 12.7: Gedämpfte Schwingung
Die Dämpfung läßt sich bei keiner Schwingung ganz vermeiden, so daß Schwingungen im
Prinzip stets so verlaufen, wie Bild 12.7 zeigt. In vielen Fällen liegt ein Zeitverhalten für
die Auslenkung vor, das durch ein Produkt aus einer Sinusfunktion und einer Exponentialfunktion beschrieben werden kann:
Auslenkungsfunktion eines gedämpften
Oszillators (bei geschwindigkeits(12.12)
proportionaler Reibung)
8 ist der Abklingkoeffi.zient, sein Kehrwert die Abklingzeit r.
Zusammenhang zwischen
Abklingkoeffizient und Abklingzeit
[8]
=
(12.13)
l/s Ge Sekunde)
Die Kreisfrequenz Wd im Argument der Sinusfunktion nennt man auch die Eigenkreisfrequenz des gedämpften Oszillators, da durch sie der periodische Teil der zusammengesetzten Funktion charakterisiert ist. Der Kehrwert von (Ud ist ent prechend die Periodendauer
Td. Die Exponentialfunktion in (12.12) beschreibt die durch die Dämpfung hervorgerufene
Abnahme der Anfangsamplitude Yo. Nach der Abklingzeit r hat diese nur noch den Wert
yo/e.
Die gesamte Auslenkungsfunktion ist zwar wegen des Dämpfungsgliedes nicht mehr periodisch, da die Bedingung y(t + Td) = y(t) nicht mehr erfüllt ist, jedoch gilt für da
Verhältnis von zwei Auslenkungen im zeitlichen Abstand von Td:
__y_et_)_ = eoTd = const.
y(t + Td)
Auslenkungsverhältnis bei der
gedämpften Schwingung
(12.14)
Das Verhältnis zweier im Abstand einer Periodendauer Td aufeinanderfolgender Auslenkungen ist konstant.
12
202
Dynamik chwingender Körper
Den natürlichen Logarithmus des Quotienten in (12.14) bezei hn t man al logarithmi-
sches Dekrement:
Logarithmi che
Dekrement
(12.15)
Für die gewählte Schwingungsfunktion ist A gleich dem Produkt au Abklingkoeffizient
und Periodendauer. Durch die Bildung der Verhältni e von z. B. aufeinanderfolgenden
Maxima einer gemessenen Auslenkungsfunktion läßt ich die Gültigkeit de Dämpfungsgesetzes überprüfen und mit Hilfe der Periodendauer Td der Abklingkoeffizient be timmen.
Genauso wie im Fall des freien harmoni chen 0 zillator erlaubt die Au lenkungsfunktion, Rückschlüsse auf die am Schwingung vorgang beteiligten Kräfte, vor allem die für
die Dämpfung maßgebliche Kraft zu ziehen. Betrachten wir wie oben ein Feder-MasseSystem so muß nur die Beschleunigung mit der Ma se multipliziert werden, um die Kraftresultierende zu erhalten. Die Berechnung erfolgt in zwei Schritten. Zunächst gilt für die
Geschwindigkeit der schwingenden Masse:
Geschwindigkeit eines
gedämpften Oszillators
(12.16)
Nach nochmaliger Ableitung erhält man die Beschleunigung:
Nach Multiplikation mit der Masse m lautet schließlich die Bewegungsgleichung
Ima = -2m8v - m (8
2
+ w~) y I
Bewegungsgleichung eines FederMasse-Oszillators mit geschwindig- (12.17)
keitsproportionaler Dämpfung
Die Bewegungsgleichung enthält zwei verschiedene Kräfte. Zum einen tritt eine Kraft auf,
die wie beim harmonischen Oszillator proportional zur Auslenkung y ist. Hierbei handelt e
sich offensichtlich um die Rückstellkraft der Feder. Entsprechend muß auch der Koeffizient
m (8 2 + w~)mit der Federkonstanten c übereinstimmen, woraus sich für die Eigenkreisfrequenz Wd folgende Beziehung ergibt:
Eigenkreisfrequenz des gedämpften (12.18)
harmonischen Oszillators
Hierbei wurde berücksichtigt, daß der Quotient c / m dem Quadrat der Kenn-(Eigen-)Kreisfrequenz des freien harmonischen Oszillators entspricht.
Die Eigenkreisfrequenz des gedämpften Oszillators ist geringer als die des freien Oszillators. Der Grenzfall 8 = wo heißt aperiodischer Grenzfall. Die Masse schwingt dann nicht
mehr, sondern bewegt sich nach einer Auslenkung langsam (kriechend) in die Ausgangslage zurück.
12.3
Erzwungene Schwingungen
203
Die zweite Kraft in (12.17) beschreibt den Einfluß der Dämpfung. Sie ist proportional zur
momentanen Geschwindigkeit des schwingenden Körpers und entspricht einer Reibungskraft, wie sie bei der Bewegung in viskosen Medien auftritt (Abschnitt 10.2). Be timmt
wird diese Kraft durch das doppelte Produkt aus Masse und Abklingkoeffizient, das auch
als Dämpfungskoeffizient bezeichnet wird:
Dämpfungskoeffizient
[b]
= kgjs
(12.19)
(Kilogramm je Sekunde)
Mit Hilfe der Federkonstanten und des Dämpfungskoeffizienten sowie nach Ersatz von a
und v durch die entsprechenden Ableitungen lautet schließlich (12.17) kurzgefaßt
I my+by+cy=O I
Sch wingungsdifferentialgleichung eines
harmonischen Oszillators mit geschwindigkeitsproportionaler Dämpfung
(12.20)
Mathematisch entspricht (12.20) einer homogenen Differentialgleichung 2. Ordnung mit
konstanten Koeffizienten.
Beispiele:
l. Die Anfangsauslenkung eines Feder-Masse-Pendels hat ich nach 4 Schwingungen halbiert. Wie
groß ist die Auslenkung nach weiteren 4 Schwingungen? Welcher allgemeine Zusammenhang be teht
zwischen der "Halbwertszeit" TI/2 für die Auslenkung und dem Abklingkoeffizienten?
Wegen (12.14) hat sich die Auslenkung nach weiteren 4 Schwingungen noch einmal halbiert d. h.,
ie beträgt jetzt nur noch 1/4 der ursprünglichen Auslenkung. Außerdem gilt
und damit TI/2
y(O))
y(TL/ 2
= 2 = eo TI / 2
In 2
= -;;-.
2. Welcher Anteil der Oszillatorenergie wurde bei Halbierung der Auslenkung in Wärme umgewandelt?
Die Energie des Oszillators zu Beginn i t potentielle Energie E = ~cy~ mit der Anfangsau lenkung
Yo. Bei Halbierung von YO i t die verbliebene Energie nur noch 1/4 der Anfangsenergie, d. h., 3/4 der
Energie wurde in Wärme umgewandelt.
12.3
Erzwungene Schwingungen
Bei den bisherigen Betrachtungen über Oszillatoren wurden nur solche Fälle behandelt, in
denen der Oszillator kurzzeitig einer äußeren Kraft au gesetzt und der Schwingungsverlauf
ausschließlich durch die Eigenfrequenz des Oszillators bestimmt war. In der Praxi bedeutsamer sind aber die Fälle, in denen der Oszillator unter der Einwirkung einer längerandauemden periodischen Kraft teht. Man denke z. B. an die Karosserieteile eines Fahrzeug
die entweder durch Motorschwingungen oder Fahrtkräfte zum Mitschwingen angeregt werden. In diesen Fällen bilden Erreger und Oszillator eine Einheit, die sowohl durch die Eigenschaften des Oszillator al auch durch die der äußeren Kraft be tirnmt ist. Je nachdem,
welche Anwendung im Vordergrund steht, wird beim Mitschwingen de Oszillator darauf
geachtet, daß dieses entweder unterdrückt wird oder aber möglich t effektiv erfolgt. Bei
12
204
Dynamik chwingender Körper
einem piezoelektrischen Schwinger z. B. wird man ver uchen, eine möglich t große Auslenkungsamplitude zu erzielen, während bei den obenerwähnten Karo erieteilen eine hohe
Dämpfung wünschenswert ist. Natürlich zeigen die in der Praxi auftretenden Erregerkräfte
i. allg. ein kompliziertes Zeitverhalten, wa die exakte Analy e von Schwingung vorgängen
erschwert. Trotzdem lassen sich die wesentlichen Ge ichtspunkte herau teIlen, wenn man
das Verhalten eines einfachen Schwingers wie er in Ab chnitt 12.2 be chrieben wurde,
unter der Einwirkung einer äußeren Kraft mit sinusförrnigem Zeitverlauf betrachtet.
Zur mathematischen Behandlung muß hierzu die rechte Seite von (12.20) durch einen Term
ergänzt werden, der eben diese Kraft berücksichtigt
I m ji + bY+ cy = F sin WEt I
Bewegungsgleichung eines gedämpften
harmonischen Oszillators bei Einwirkung
einer sinusförmigen Kraft
(12.21)
F ist die Amplitude der erregenden Kraft, WE die Kreisfrequenz (Erregerkreisfrequenz) der
Kraft.
Mathematisch erfolgt nun die Lösung des Problems in der Weise, daß eine Auslenkungsfunktion für den Oszillator angesetzt wird, die sowohl dem Fall F = 0, d. h. für eine
verschwindende äußere Kraft, als auch dem Sinusverlauf Genüge leistet. Der Fall F = 0
ent pricht dem Schwingungsprob1em des freien gedämpften Oszillators, d. h., die Auslenkungsfunktion ist die von Gleichung (12.12). Einen Lösungsansatz für F > 0 erhält man
aus der Überlegung, daß zumindest nach einer längeren Zeitdauer der Oszillator mit der
gleichen Frequenz wie der Erreger schwingt, aber evtl. eine Pha enwinkelverschiebung gegenüber dem Erreger aufweist. Die gesamte Schwingungsfunktion des Oszillators ist also
eine Überlagerung aus (12.12) und einer sinusförmigen Funktion. Gleichung (12.12) spielt
aber nur während des Einschwingvorgangs eine wesentliche Rolle, da, bedingt durch den
exponentiellen Dämpfungsfaktor, dieser Schwingungsanteil allmählich verschwindet. Für
die stationäre Schwingung des Oszillators bleibt also nur noch der Sinusanteil übrig:
I Y = 51 sin (WE! + qJo) I
Stationäre Auslenkungsfunktion eines
Oszillators bei Sinuserregung
(12.22)
Sowohl die Amplitude y als auch der Nullphasenwinkel qJO sind abhängig von der Erregerfrequenz WE, wie sich leicht durch Einsetzen von (12.22) in (12.21) zeigen läßt. Nach
Bildung der entsprechenden Ableitungen erhält man:
-m~y sin qJ + bWEY cos qJ + cy sin qJ = ft sin WEt, mit
qJ
=
WEt
+ CPo
Die drei Summanden auf der linken Seite repräsentieren Kräfte, wobei der erste Summand
die Trägheitskraft, der zweite die Dämpjungskraft und der dritte die Rückstellkraft des
Feder-Ma se-Systems bedeuten.
Bei kleinen Erregerfrequenzen dominiert die Rückstellkraft, bei großen die Trägheitskraft.
Eine pezielle Sitiuation ist dann gegeben, wenn die Erregerfrequenz gleich der Eigenfrequenz de ungedämpften Oszillators i t, d. h., wenn WE = wo. In diesem Fall heben sich
12.3
Erzwungene Schwingungen
205
Trägheitskraft und Rückstellkraft gegenseitig auf, und es bleibt nur noch die Dämpfungskraft übrig.
Durch Koeffizientenvergleich der linken und der rechten Seite obiger Gleichung erhält man
für die Amplitude y sowie den Nullphasenwinkel ({JO:
~
a)
b)
c)
~
F
sowie ({JO ~ 0 für WE « wo
c
Erreger und Oszillator schwingen gleichphasig; die Amplitude entspricht einer Auslenkung, wie sie auch bei einer statischen Kraft vorhanden wäre.
cy ~
F, d. h. , Y ~
bwOY ~
-
"-
"
Y=
F
TI
sowie ({JO = - - fürWE = WO
bwo
2
Hier bestimmt der Dämpfungskoeffizient b die Amplitude. Bei verschwindender Dämpfung geht die Amplitude gegen unendlich! Die Phasenverschiebung beträgt -90 0 •
F, d.h.,
2"
mWEY ~ F,
-
"
d. h.,
Y~
-
F-2 sowie ({JO
mW E
~ -TI
für WE
»
wo
Die Amplitude wird mit zunehmender Erregerfrequenz immer kleiner; gleichzeitig nähert sich die Phasenverschiebung dem maximalen Wert von -180 0 .
Natürlich lassen sich Amplitude und Nullphasenwinkel auch für den allgemeinen Fa]] ermitteln. Ein einfacher Lösungsansatz ergibt sich unter Verwendung eine Zeigerdiagramm .
Da alle Terme in obiger Gleichung bis auf eine Phasenverschiebung die gleiche Zeitabhängigkeit aufweisen, lassen sie sich in ein gemeinsames Zeigerdiagramm eintragen (Bild
12.8). Die Dämpfungskraft ist um 90 0 (cos-Funktion!), die Trägheitskraft um 1800 gegenüber der Rückstellkraft phasenverschoben.
"
F
ey"
Bild 12.8: Zeigerdarstellung der erzwungenen Schwingung: die
Zeiger repräsentieren die Kräfte, die am 0 zillator angreifen, eingetragen sind jeweils die Beträge.
Nach Anwendung der Regeln für Vektoraddition erhält man für
y bzw. ({JQ:
Frequenzgang der
Auslenkungsamplitud.e
({JO = arctan
m
(2
2)
WE-WO
Frequenzgang des
Nullphasenwinkels
(12.23)
(12.24)
Der Verlauf der Auslenkungsamplitude und des Nullpha enwinkels in Abhängigkeit von
der Erregerfrequenz ist in Bild 12.9 wiedergegeben.
206
]2
"
Dynamik chwingender Körper
kleine Dämpfung
Ymax
t
"
Y
große Dämpfung
"
Ystat
t
({JO
o
kleine Dämpfung
Jr
2
I
I
I
I
I
I
-Jr
__________________ 1__________________ _
Bild 12.9: Auslenkungsamplitude und Nullphasenwinkel einer erzwungenen Schwingung als Funktion der Kreisfrequenz für verschiedene Dämpfungen
Die oben nur näherungsweise bestimmte Abhängigkeit der beiden Schwingungsgrößen von
der Erregerfrequenz wird bestätigt. Die Auslenkungsamplitude steigt, von einem festen
Wert ausgehend, zunächst mit der Frequenz an, um dann nach Überschreiten eines Maximums ra ch abzufallen. Den Fall, daß die Amplitude einen Maximalwert erreicht, nennt
man auch Auslenkungsresonanz. Der Oszillator ist dann ein Resonator. Die Frequenz,
bei der Resonanz eintritt, ergibt sich aus der Forderung, daß der Nenner in (12.23) minimal
wird. Nach Bildung der ersten Ableitung des Nenners nach WB und Nullsetzen erhält man:
Kreisfrequenz bei
Auslenkungsresonanz
(12.25)
Die Resonanzfrequenz (Kreisfrequenz) ist kleiner als die Eigenfrequenz des ungedämpften, aber auch des gedämpften Oszillators. Mit zunehmender Dämpfung verschiebt sie sich
zu immer kleineren Werten. Im Fall sehr schwacher Dämpfung und großer Masse des Oszillators stimmt sie mit der Kennkreisfrequenz WO überein. Gleichzeitig verbreitert sich mit
zunehmender Dämpfung der Kurvenverlauf, Höhe und Schärfe der Resonanzlinie nehmen
ab.
Der Frequenzgang des Nullphasenwinkels zeigt, daß bei kleinen Frequenzen Erreger und
Oszillator gleichpha ig schwingen, ({Ja bei WE = WO den Wert -90 einnimmt und schließlich bei hohen Frequenzen Erreger und Oszillator gegenphasig schwingen. Im Resonanzfall ist die Verschiebung etwas kleiner als -90 0 • Mit zunehmender Dämpfung verflacht der
Verlauf des Nullphasenwinkels. Die S-Kurvenform ist dann weniger ausgeprägt.
0
Wenn man von Re onanz bei mechanischen Systemen spricht, ist meistens die Auslenkungsresonanz gemeint. Man sollte aber immer daran denken, daß auch andere physikalische Größen wie z. B. die Auslenkungsgeschwindigkeit Resonanzverhalten aufweisen. Die
12.3
Erzwungene Schwingungen
207
Frequenz, bei der ein Maximum der Geschwindigkeitsamplitude auftritt, ist aber eine andere als die Resonanzfrequenz für die Auslenkung (es gilt ja = wy). Ähnliche Aussagen
gelten auch bei anderen Schwingungssystemen, wie etwa elektromagneti chen Schwingkreisen. Hier wird zwischen Strom- und Spannungsresonanz unterschieden.
v
Mit Hilfe der Beziehungen über Auslenkungsamplitude und Nullphasenwinkel läßt sich auch eine
Aussage über die vom Erreger zu erbringende Leistung treffen. Multipliziert man die Erregerkraft
mit der Geschwindigkeit des Oszillators, so erhält man
P
= Fv =
FWEY sinwEt COS(WEt
+ CPO)
Das Produkt aus den beiden Sinusfunktionen läßt sich in eine Summe umwandeln, so daß gilt
Der erste Summand in der Klammer besitzt eine sinusförmige Zeitabhängigkeit, während der zweite Summand von der Zeit unabhängig ist. Integriert man die Leistung über eine Periodendauer, so
verschwindet der Beitrag des ersten Terms, und es bleibt nur noch der zweite übrig:
T
fo
1 ~
A
•
P dt = -2'FwEyT SIll<fJO
Für die mittlere Leistung gilt daher
1 ~
Pm = -2'FWEY mcpo
Mit (12.23) und (12.24) ergibt sich schließlich
Frequenzgang der mittleren
Leistung
(12.26)
Die mittlere Leistung ist ausschließlich durch die Dämpfung de 0 zillator be timmt. Bei verschwindender Dämpfung, d. h. b = 0, wird auch Pm zu null, au genommen den Fall WE = wo .
Trägheits- und RückstellkTaft erfordern zwar auch Antrieb leistung, jedoch kehrt diese wieder in den
Erreger zurück. Es handelt sich hierbei um eine Blindleistung. Nur der Dämpfungsterm erfordert
Wirkleistung.
In Bild 12.10 ist der Frequenzgang der rnittleren Lei tung grafi ch wiedergegeben. Bei kleinen Frequenzen und schwacher Dämpfung wächst Pm zunächst quadrati ch mit der Frequenz, um nach Überschreiten eines Maximums umgekehrt proportional zum Quadrat der Frequenz wieder abzufallen. Die
Frequenz, bei der Pm maximal wird (Leistungsresonanz) entspricht der Eigenfrequenz de ungedämpften Oszillators und ist damit etwas größer al die Frequenz für Amplitudenre onanz. Speziell
bei einer Anregung mit der Eigenfrequenz ergibt sich für die mittlere Lei tung
Maximale mittlere Leistung
( 12.27)
t
kleine Dämpfung
große Dämpfung
Bild 12.10: Mittlere Wirklei tung eines gedämpften 0 zillator aI Funktion der Erregerkrei frequenz
Bei vorgegebener Kraftamplitude und ver chwindendem Dämpfung koeffizienten geht Pm gegen
unendlich, wa zunäch t widersprüchlich erscheint. Da Ergebni wird er tändlich, wenn man die
Reibungsarbeit betrachtet, die wegen der immer größer werdenden Au lenkung amplitude ebenfal1s
unendlich groß werden muß.
Mit Hilfe der Systemparameter Masse m, Dämpfung koeffizient b und Federkonstante ci t
das Schwingung verhalten des zugrunde gelegten Modelloszillators voll tändig be timmt.
Durch Variation die er drei Größen wird eine Vielzahl ganz unter chiedlicher Schwingungsformen ermöglicht.
Beispiele:
1. Wie groß ist die Au lenkungsamplitude eines Re onator im Resonanzfall?
Setzt man an Stelle der Erregerkreisfrequenz in (12.23) die Re onanzkreisfrequenz (12.25) und verwendet für b den Au druck (12.19), so ist die Au lenkung amplitude
A
A
Y
F
= ------r===2
28mJw
6- 8
Wenn darüber hinau 8« wo (schwache Dämpfung), gilt die Näherung
A
A
A
F
F
28mwo
bWO
Y~---
d. b.,
Yentspricht dann der Amplitude bei der Kennkreisfrequenz des 0
zillator .
2. Wie groß muß die Dämpfung eine 0 zillator sein, damit er gerade keine Auslenkungsre onanz
mehr be i tzt?
Au (12.25) folgt daß WR genau dann null wird wenn
w6 - 28 2 = 0, d.h., 8 = ~.
3. Ein Oszillator mit der Ma e 1,0 kg und der Federsteife 100 N/m wird bei der Kennkrei frequenz
betrieben. Die Au lenkungsamplitude beträgt 10 cm, die Wirklei tung des Erregers 1,0 W. Wie groß
ind die Kraftamplitude und der Abklingkoeffizient?
A
Für y gilt bei WE = wO
F
1
bwO
2
Y = - . In (12.27) eingesetzt, erhält man Pm = - FywO ' Die Kennkrei
frequenz ist
WO=/f.=
l00N
1, 0 kg· m
=101/
A
-
Daraus folgt
2Pm
2 . 1, 0 W . S
F=-A-=
=2,ON
YWQ
0, 10 m . 10
A
Entsprechend gilt dann
A
b
F
8------ 2m - 2mywO
2, ON· s
- - - - - - - - = 1, 0 1/s
2·1,Okg·0,10m·1Q
12.4 Gekoppelte Oszillatoren
Die Schwingungen einer angestoßenen Glocke, einer gezupften Saite oder einer durch
Flugzeugschall angeregten Fensterscheibe haben eines gemeinsam: sie sind das Ergebni
der Kopplung vieler Oszillatoren. Anzahl und Eigenschaften dieser Oszillatoren sind letzten Endes durch die atomare oder molekulare Struktur des betrachteten Körpers bestimmt,
was natürlich bedeutet, daß eine enorme Zahl von Teilchen betrachtet werden müßte. Für
die meisten praktischen Fälle gibt es jedoch Modellvorstellungen, mit denen die Schwingungseigenschaften eines solchen Vielteilchensystems hinreichend genau beschrieben werden können, ohne daß eine solche mikroskopische Sichtweise vonnöten wäre. Natürlich
gibt es auch weniger komplizierte Fälle von realen Teilchensystemen, die sich mit verhältnismäßig einfachen Mitteln berechnen lassen und nützlich zum Ver tändnis ausgedehnter
Systeme sind. Drei Beispiele für einfache Systeme aus gekoppelten Oszillatoren ind in
Bild 12.11 wiedergegeben.
/
Bild 12.11: Beispiele für gekoppelte 0 zillatoren
Die wesentliche Bedeutung der Kopplung von 0 zillatoren beruht darauf, daß owohl ein
Austausch von Impuls als auch von Energie zwischen den 0 zillatoren möglich wird.
12.4.1 Systeme aus einzelnen Oszillatoren
Die Auswirkungen auf das Schwingungsverhalten der einzelnen 0 zillatoren las en ich
arn Beispiel zweier durch eine gemeinsame Kopplungsfedermiteinander verbundenen identischer Feder-Masse-Schwinger ohne Dämpfung demonstrieren (Bild 12.12).
In Bild 12.13 ist die Auslenkung der beiden Mas en in Abhängigkeit von der Zeit t dargestellt, wobei die Masse 1 zum Zeitpunkt t = 0 die Auslenkung x J = i und die Mas e
2 die Auslenkung X2 = 0 hatte. Die Kopplungsfeder wurde dabei 0 gewählt, daß ihre
Federkonstante kleiner als die der Einzelfedern war (c' < C, d. h. " chwache" Kopplung).
Beide Massen führen modulierte Sinusschwingungen durch wie wir sie bereit im Zu ammenhang mit Schwebungen kennengelemt hatten. Dabei ergeben sich in periodi chen Abständen Schwingung zustände, bei denen die Auslenkungsamplituden ma.ximal bzw. null