Dynamik geradliniger Bewegungen
Werbung

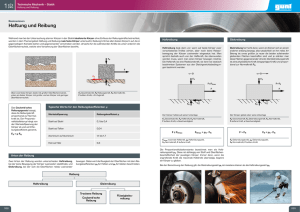
5 Dynamik der geradlinigen Bewegungen: Kraft und Masse 5 Dynamik der geradlinigen Bewegungen: Kraft und Masse Physik I. Mechanik Seite 1 von 12 In der Kinematik werden Bewegungen durch die Größen Ort, Geschwindigkeit und Beschleunigung in Abhängigkeit von der Zeit durch Bewegungsgleichungen genannte Funktionen beschrieben. In der Dynamik (dynamis, griech.: Kraft) wird untersucht, wie die verschiedenen Bewegungsformen zustande kommen. Dazu werden die Kräfte als Wechselwirkung der Umgebung mit dem bewegten Körper und der Masse des Körpers als seine die Bewegung beeinflussende Eigenschaft betrachtet. Sir Isaac Newton (1643-1727) fasste die Erfahrungen und Erkenntnisse in drei als Axiome bezeichneten Grundsätze zusammen. 5.1 Erstes Newtonsches Gesetz 5.1.1 Trägheitsprinzip Alle Körper sind träge: Jeder Körper behält genau dann seinen Bewegungszustand der gleichförmigen geradlinigen Bewegung bei, wenn keine äußeren Kräfte auf ihn einwirken oder wenn die resultierende Gesamtkraft als Summe der auf ihn einwirkenden äußeren Kräfte gleich Null ist. v = konstant ⇔ ( a = 0 ) ⇔ F = 0 Also gilt auch: v ≠ konstant ⇔ a ≠ 0 ⇔ F ≠ 0 Somit: Um die Geschwindigkeit eines Körpers zu ändern, ist eine Kraft erforderlich. Die Ursache einer beschleunigenden Bewegung ist eine Kraft. Zur Aufrechterhaltung einer geradlinigen gleichförmigen Bewegung ist keine Kraft notwendig. Kräfte ändern den Bewegungszustand eines Körpers (dynamische Kraftwirkung) oder verformen einen Körper (statische Kraftwirkung). 5.1.2 Sonderfall der Ruhe Ein ruhender Körper bleibt im Zustand der Ruhe mit v = 0 , solange auf ihn keine äußeren Kräfte einwirken oder die resultierende Gesamtkraft als Summe der auf ihn einwirkenden äußeren Kräfte gleich Null ist. 5.2 Zweites Newtonsches Gesetz 5.2.1 Vorkenntnis Eine konstante beschleunigende Kraft bewirkt bei einem Körper mit gleichbleibender Masse eine konstante Beschleunigung. http://www.supernowa.de http://www.super-nowa.de 13.10.2015 5 Dynamik der geradlinigen Bewegungen: Kraft und Masse Physik I. Mechanik Seite 2 von 12 Folge: In diesem Fall genügt zur Bestimmung der Beschleunigung eine Orts- und zugehörige Zeitmessung. Beispiele: Schiefe Ebene (Fahrbahnversuch), Fall- und Wurfbewegungen 5.2.2 Versuchsaufbau Um den Zusammenhang zwischen einer beschleunigenden Kraft F , der durch sie hervorgerufenen Beschleunigung a und der beschleunigten Masse m zu untersuchen, verwendet man eine horizontale Luftkissenfahrbahn. F G K (Spannungsquelle) In Schalterstellung I wird der Fahrbahngleiter G durch den Elektromagneten am Startpunkt festgehalten. Wird der Schalter in die Stellung II gebracht, starten gleichzeitig Gleiter G, angehängte Massestücke K und Uhr. Fährt der Gleiter durch die Lichtschranke, dann wird die Uhr gestoppt. Die Uhr zeigt somit die Zeit t an, welche der Gleiter für den vom Start bis zur Lichtschranke zurückgelegten Weg x benötigt hat. Der Gleiter G wird durch die Schwerkraft (Gewichtskraft, Erdanziehungskraft, Gravitationskraft) der am Ende eines Fadens hängenden Massestücke K beschleunigt. Diese Gewichtskraft liefert nach Umlenkung mit Hilfe einer nahezu reibungsfreien Rolle die beschleunigende Kraft F parallel zur Luftkissenfahrbahn. Die Reibung zwischen Gleiter und Fahrbahn ist vernachlässigbar klein. Zu beachten ist, dass der beschleunigte Körper sich aus Gleiters G und Massestücke K zusammensetzt. Einflüsse durch den auch mit beschleunigten Faden und durch die rotierende Rolle können vernachlässigt werden. 5.2.3 Grundgleichung der Mechanik: Kraftgesetz als Zusammenhang zwischen Beschleunigung, beschleunigender Kraft und beschleunigter Masse Ein und derselbe Körper wird von verschiedenen Kräften beschleunigt. http://www.supernowa.de http://www.super-nowa.de 13.10.2015 5 Dynamik der geradlinigen Bewegungen: Kraft und Masse Messung Nr. Kraft F Ort x in m Zeit t in s 2x m a = 2 in 2 t s 1 einfach Im Rahmen der Messgenauigkeit gilt: 2 doppelt Physik I. Mechanik Seite 3 von 12 3 vierfach F = konstant a ⇒ F~a ⇒ F = m ⋅ a mit m = konstant Die Proportionalitätskonstante m ist vom beschleunigten Körper abhängig und heißt Masse. Die Einheiten sind so festgelegt, dass gilt: N = kg ⋅ 5.2.4 m s2 Kraftgesetz als Grundgleichung der Mechanik F = m⋅a Vektorielle Schreibweise: 5.2.5 F = m⋅a Trägheitssatz als Sonderfall der Grundgleichung F = m⋅a F = 0 ⇔ a = 0 ⇔ v = konstant 5.3 Drittes Newtonsches Gesetz 5.3.1 Wechselwirkungsprinzip Reaktionsprinzip: actio = reactio Eine Kraft, die auf einen Körper wirkt, geht immer von einem anderen Körpern aus. Kräfte treten immer paarweise als Wechselwirkung zwischen zwei Körpern auf: Wirkt auf einen Körper A eine durch einen Körper B hervorgerufene Kraft FA , so wirkt der Körper A auf den Körper B mit einer betragsmäßig gleichgroßen, aber entgegengesetzt gerichteten Gegenkraft FB = − FA . http://www.supernowa.de http://www.super-nowa.de 13.10.2015 5 Dynamik der geradlinigen Bewegungen: Kraft und Masse FB←A = − FA←B FA←B A 5.3.2 Physik I. Mechanik Seite 4 von 12 B Kräftegleichgewicht Zu beachten ist, dass Kraft und Gegenkraft stets an zwei verschiedenen Körpern angreifen. Sie dürfen deshalb begrifflich nicht verwechselt werden mit zwei betragsmäßig gleichgroßen, entgegengesetzt gerichteten Kräften, die am selben Körper K angreifen und sich gegenseitig aufheben: Kräftegleichgewicht mit Kraft und Kompensationskraft. Kraft und Gegenkraft greifen an zwei verschiedenen Körpern an. Sie halten sich also nicht das Gleichgewicht. Nur Kräfte, die am gleichen Körper angreifen, können sich das Gleichgewicht halten. F2 = − F1 F1 K 5.4 Anwendungen des Kraftgesetzes 5.4.1 Gewichtskraft und Fallbeschleunigung Die beim freien Fall eines Körpers der Masse m auftretende Fallbeschleunigung g wird verursacht durch die auf den Körpers einwirkende Gewichtskraft (Erdanziehungskraft, Schwerkraft, Gravitationskraft) FG . Gewichtskraft = Masse × Fallbeschleunigung vektoriell: FG = m ⋅ g Betrag: FG = m ⋅ g In Mitteleuropa erfährt ein Körper der Masse m = 1,00 kg die Gewichtskraft vom Betrag m FG = mg = 1,00 kg ⋅ 9,81 2 = 9,81 N . Ein Körper vom Gewicht FG = 1,00 N besitzt die Masse s FG 1,00 N m= = = 0,102 kg = 102 g . m g 9,81 2 s http://www.supernowa.de http://www.super-nowa.de 13.10.2015 5 Dynamik der geradlinigen Bewegungen: Kraft und Masse Physik I. Mechanik Seite 5 von 12 5.4.2 Physik und Geometrie der schiefen Ebene ohne und mit Reibung Eine Körper der Masse m gleitet ohne Anfangsgeschwindigkeit und ohne Eigenantrieb eine schiefe Ebene hinab. m h b Vektorgleichung: FH = FG + FN Gewichtskraft: FG = m ⋅ g Betragsgleichungen: sin α = FH FG FH = FG ⋅ sin α = m ⋅ g ⋅ sin α = m ⋅ g ⋅ cos α = h ℓ FN FG FN = FG ⋅ cos α = m ⋅ g ⋅ cos α = m ⋅ g ⋅ http://www.supernowa.de http://www.super-nowa.de b ℓ 13.10.2015 5 Dynamik der geradlinigen Bewegungen: Kraft und Masse Physik I. Mechanik Seite 6 von 12 Zusammenhang zwischen Steigung und Neigungswinkel: Steigung = tan α = Pythagoras: h2 + b2 = ℓ2 Reibungskraft: FR ∼ FN h b b ℓ µ = Reibungszahl; [ µ ] = 1 FR = µ ⋅ FN = µ ⋅ FG ⋅ cos α = µ ⋅ m ⋅ g ⋅ cos α = µ ⋅ m ⋅ g ⋅ (1) Betrachtung ohne Reibung: Mathematisch-theoretische Berechnung der Beschleunigung ohne Berücksichtigung der Reibung: Kraftansatz ohne Reibung: FH = m ⋅ aT Beschleunigung: h m⋅ g ⋅ ℓ h = g⋅ FH FG ⋅ sin α m ⋅ g ⋅ sin α aT = = = = m ℓ m m m h g ⋅ sin α = g ⋅ ℓ (2) Betrachtung mit Reibung: Experimentelle Bestimmung der Beschleunigung mit Berücksichtigung der Reibung: Kraftansatz mit Reibung: FH + FR = m ⋅ aE Beschleunigung: aE = (3) Aussagen zur Reibung: Vergleich von reibungsfreier Rechnung und experimentell untersuchter Bewegung: Berechnung der Reibungskraft: FH + FR = m ⋅ aE 2x x = Beschleunigungstrecke t2 t = Beschleunigungszeit FR = m ⋅ aE − FH = m ⋅ aE − m ⋅ aT = m ⋅ ( aE − aT ) < 0 <0 2 x gh FR = m ⋅ 2 − ℓ t Betrag der Reibungskraft: FR = m⋅ | aE − aT |= m ⋅ ( aT − aE ) > 0 <0 http://www.supernowa.de http://www.super-nowa.de 13.10.2015 5 Dynamik der geradlinigen Bewegungen: Kraft und Masse FR m ⋅ ( aT − aE ) b m⋅ g ⋅ ℓ h 2x g⋅ − 2 a − aE ℓ t = T = b b g⋅ g⋅ ℓ ℓ Reibungszahl: µ= Folgerungen: h 2x h 2x g⋅ − 2 g⋅ − 2 ℓ t µ= ℓ t = b ℓ2 − h2 g⋅ g ⋅ ℓ ℓ 5.4.3 FN = Physik I. Mechanik Seite 7 von 12 Reibungskraft bei schiefer und horizontaler Ebene ALLGEMEINER FALL: SCHIEFE EBENE FR ~ FN FR = µ ⋅ FN = µ ⋅ FG ⋅ cos α = µ ⋅ m ⋅ g ⋅ cos α = µ ⋅ m ⋅ g ⋅ b ℓ SONDERFALL: HORIZONTALE EBENE α = 0° ⇒ cos 0° = 1 ⇒ FR = µ ⋅ FG ⋅ 1 = µ ⋅ FG = µ ⋅ m ⋅ g 5.4.4 Aufgabe: Bewegung längs einer schiefen Ebene Die bei der beschleunigten Bewegung eines Körpers der Masse m = 0,48 kg auf einer schiefen Ebene auftretende Reibung soll durch den Vergleich zwischen einer mathematisch-theoretischen Berechnung und einer experimentellen Messung untersucht werden. Für die Abmessungen der schiefen Ebene gilt: die Höhe beläuft sich auf h = 10 cm , die Länge der Hangstrecke von A nach B beträgt ℓ = 1,96 m . Der betrachtete Körper besitzt keinen Eigenantrieb und startet im Punkt A mit der Ortskoordinate x = 0 m zum Zeitpunkt t = 0 s aus der Ruhe heraus. 1.0 Vernachlässigen Sie bei der folgenden mathematisch-theoretischen Betrachtung des Bewegungsablaufs die Reibung. 1.1 Fertigen Sie für die auf den Körper einwirkenden Kräfte einen beschrifteten Kräfteplan an. 1.2 Berechnen Sie den Betrag a1 der bei der reibungsfrei angenommenen Bewegung auftretende theoretische Beschleunigung. m Ergebnis : a1 = 0,50 2 s http://www.supernowa.de http://www.super-nowa.de 13.10.2015 5 Dynamik der geradlinigen Bewegungen: Kraft und Masse 2.0 Bei der Versuchsdurchführung wird nun die Reibung berücksichtigt. Die experimentell ermittelten Daten sind in folgender Messwertetabelle zusammengefasst: Messung Nr. Ort x in m Zeit t in s 0 0 0 1 0,50 2,4 2 1,00 3,3 Physik I. Mechanik Seite 8 von 12 3 1,50 4,1 4 1,96 4,7 2.1 Zeigen Sie durch eine geeignete rechnerische Auswertung der Messwertetabelle, dass der Körper eine gleichmäßig beschleunigte Bewegung ausführt. Berechnen Sie den Betrag a2 der bei der Versuchsdurchführung tatsächlich auftretenden Beschleunigung des Körpers. m Ergebnis : a2 = 0,18 2 s 2.2 Begründen Sie allgemein, dass die betrachtete Bewegung des Körpers genau dann gleichmäßig beschleunigt ist, wenn man die während des Bewegungsablaufs auftretende Reibung als konstant annimmt. 2.3 Berechnen Sie die Koordinate FR der während der Bewegung auf den Körper einwirkenden Reibungskraft. 2.4 Ermitteln Sie die Reibungszahl µ . LÖSUNG: 1.1 Kräfteplan 1.2 Mathematisch-theoretische Berechnung der Beschleunigung ohne Berücksichtigung der Reibung: FH = m ⋅ a1 FG ⋅ sin α = m ⋅ a1 m ⋅ g ⋅ sin α = m ⋅ a1 h m ⋅ g ⋅ = m ⋅ a1 ℓ h m 0,10 m m a1 = g ⋅ = 9,81 2 ⋅ = 0,50 2 ℓ s 1,96 m s 2.1 Experimentelle Ermittlung der Beschleunigung mit Berücksichtigung der Reibung: a2 = 2 ⋅ 2.2 x m = 0,18 2 2 t s Die bewegungsverursachende resultierende Gesamtkraft aus konstanter Hangabtriebskraft und konstanter Reibungskraft sowie die Masse des bewegten Körpers sind konstant. Damit ist auch die Beschleunigung als Quotient aus bewegungsverursachender http://www.supernowa.de http://www.super-nowa.de 13.10.2015 5 Dynamik der geradlinigen Bewegungen: Kraft und Masse Physik I. Mechanik Seite 9 von 12 Gesamtkraft und Masse konstant. Eine Bewegung mit konstanter Beschleunigung nennt man gleichmäßig beschleunigt. 2.3 Reibungskraft FH + FR = m ⋅ a2 FR = m ⋅ a2 − FH = m ⋅ a 2 − m ⋅ a1 = m ⋅ (a2 − a1 ) = 0,48 kg ⋅ (0,18 − 0,50) 2.4 m = − 0,15 N s2 Reibungszahl FR µ= FR 5.4.5 = FR ⋅ ℓ = b m ⋅ g ⋅ ℓ2 − h2 ℓ 0,15 N ⋅ 1,96 m = = 0, 032 m 0, 48 kg ⋅ 9,81 2 ⋅ (1,96 m) 2 − (0,10 m)2 s FN = m⋅ g ⋅ Horizontale Fahrbahn m1 R A B x m2 h=x Boden m1 = 0,088 kg m2 = 0, 012 kg http://www.supernowa.de http://www.super-nowa.de 13.10.2015 5 Dynamik der geradlinigen Bewegungen: Kraft und Masse Physik I. Mechanik Seite 10 von 12 Mathematisch-theoretische Betrachtung ohne Berücksichtigung der Reibung: FoR = m ⋅ aoR m2 ⋅ g = (m1 + m2 ) ⋅ aoR m m ⋅g s 2 = 1,18 m = 2 = m1 + m2 0,088 kg + 0,012 kg s2 0,012 kg ⋅ 9,81 aoR Experimentelle Durchführung mit Berücksichtigung der Reibung: x in m t in s x m in 2 2 t s 0 0 0,250 0,684 0,500 0,967 0,750 1,18 1,000 1,37 --- 0,534 0,535 0,539 0,533 Im Rahmen der Messgenauigkeit gilt: ⇒ amR = konstant mit a mR = 2x = t2 x = konstant t2 2 ⋅ (0,534 + 0,535 + 0,539 + 0,533) 4 m s 2 = 1,07 m s2 FmR = m ⋅ amR FoR + FR = m ⋅ amR m2 ⋅ g − µ ⋅ m1 ⋅ g = (m1 + m2 ) ⋅ amR µ ⋅ m1 ⋅ g = m2 ⋅ g − (m1 + m2 ) ⋅ amR m ⋅ g − (m1 + m2 ) ⋅ amR µ= 2 = m1 ⋅ g http://www.supernowa.de 0, 012 kg ⋅ 9,81 m m − (0, 088 kg + 0, 012 kg) ⋅ 1, 07 2 2 s s = 0, 012 m 0,088 kg ⋅ 9,81 2 s http://www.super-nowa.de 13.10.2015 5 Dynamik der geradlinigen Bewegungen: Kraft und Masse 5.4.6 Atwood-Fallmaschine Physik I. Mechanik Seite 11 von 12 x F = m⋅a Wenn man die Reibung vernachlässigt, ergibt sich: m * ⋅g = (2 ⋅ M + m*) ⋅ a (m1 − m2 ) ⋅ g = (m1 + m2 ) ⋅ a oder: (1) Bestimmung der Fallbeschleunigung: g= 2⋅ M + m* ⋅a m* oder: Experimentelle Bestimmung liefert: a = g= m1 + m2 ⋅a m1 − m2 g= m1 + m2 2 x ⋅ m1 − m2 t 2 2x t2 Fallbeschleunigung als Folgerung: g= 2 ⋅ M + m * 2x ⋅ 2 m* t oder: (2) Vergleich der reibungsfreien Berechnung der Beschleunigung mit der experimentell bestimmten Beschleunigung: Berechnung: aRechnung = m* ⋅g 2⋅ M + m* http://www.supernowa.de oder: aRechnung = http://www.super-nowa.de m1 − m2 ⋅g m1 + m2 13.10.2015 5 Dynamik der geradlinigen Bewegungen: Kraft und Masse Experiment: aExperiment = http://www.supernowa.de Physik I. Mechanik Seite 12 von 12 2x t2 http://www.super-nowa.de 13.10.2015