Ursache Kräfte Newton: 3 Gesetze („Axiome“):
Werbung
:")
Ursache
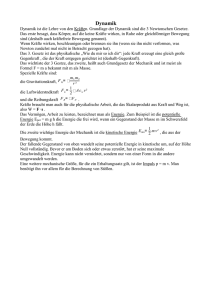
1.2 Dynamik
von Bewegungen
(bzw. Bew.-Änderungen)
Kräfte
wirken auf Körper mit Masse
Grundlagen:
• Symmetrie / Invarianzen
• Prinzip der kleinsten Wirkung
• Energie-, Impuls-, Drehimpulserhaltung
Newton:
exp. Beobachtungen
3 Gesetze („Axiome“):
(...nicht streng beweisbar!)
1.2.1 Newtonsche Gesetze
1.
Trägheitsgesetz
Ohne äußere Beeinflussung bleibt ein Körper im Zust. der Ruhe
r
oder der gleichförmig geradlinigen Bewegung ( v = const . )
2.
Grundgesetz der Mechanik
r
r
r
Die zeitliche Änderung des Impulses p = m ⋅ v ist gleich der resultierenden Kraft F
res
r
r
dp
[Gl.1.2.1.]
die auf den Körper wirkt
F =
res d t
für konstante Masse:
r
r
r
d( mv )
dv
=m
F =
res
dt
dt
r
r
F = ma
res
3.
[Gl.1.2.2.]
Wechselwirkungsgesetz ( "actio = reactio" )
r
Wirkt ein Körper A auf einen Körper B mit der Kraft F
so wirkt auch Körper B auf
AB
r
Körper A mit der Kraft F . Beide Kräfte haben den gleichen Betrag aber
BA
r
r
[Gl.1.2.3.]
entgegengesetzte Richtungen: F = − F
AB
BA
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.1/16
Newton I
•
•
•
Trägheit: Widerstand gegen Bewegungsänderung
)
Masse
- "träge" Masse
⇐ hier!
- "schwere" Masse
Exp.: beide gleich!
Bewegungszustand (Betrag u. Richtung der Geschw.) ändert sich nur,
wenn KRAFT wirkt
Trägheitsgesetz (TG) (u. II./III. N.-Ges.) gilt nur in bestimmten Bezugssystemen …
'
&
TG gilt nicht
TG gilt
♦
in beschleunigten
Bezugssystemen
in einem
"Inertialsystem"
Auto in Kurve
Anfahrender Bus, Aufzug etc.
a.) "Fixsternhimmel"
b.) gleichf. geradl. gegen a.) bewegt
Ein Bezugssystem, in dem das TG gilt, heißt
INERTIALSYSTEM
♦
♦
♦
Es existieren beliebig viele Inertialsysteme
Diese bewegen sich gegeneinander und gegenüber dem Fixsternen gleichförmig u.
geradlinig.
Alle Inertialsysteme sind gleichwertig, es gibt keine "absolute Ruhe"
Newton II
•
•
res. Kraft und Beschleunigung sind einander proportional:
r r
F ∝ a ⎪⎫
Prop.-Konstante : (träge) Masse
r
r⎬
F = m ⋅ a ⎪⎭
Kraftmessung:
a.)
Def. eines Kraftstandards
Vergleich mit Standard
(2 Kräfte sind gleich, wenn sie den gleichen Körper gleich beschleunigen)
b.)
prakt. Kraftmessung:
Prinzip: elastische Verformung ⇒ mech./elektr./opt. Signal
Bsp.: Federwaage, DMS, Piezo-Kristall,
Vergleich (Regelkreis, Nullabgl.) mit bek. Kraft (z.B. El..-Magnet)
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.2/16
•
resultierende Kraft
ALLE Kräfte die auf Körper wirken vektoriell addieren!
1
r
r r
r
F = F + F + F +K [Gl.1.2.4.]
res 1 2 3
3
1
2
2
3
4
Fres
4
Anwendung des II. Newtonschen Gesetzes
•
•
Beschleunigung bekannt
⇒ Fres berechnen
mehrere Kräfte, eine davon unbekannt
⇒ unbekannte Kraft berechnen
Kraft / Kräfte bekannt
⇒ Beschleunigung berechnen
⇒ innere Kräfte zwischen Teilen berechnen
1.
2.
3.
betrachte interessierenden Körper isoliert
welche
Kräfte
r
r wirken auf diesen Körper?
F = ∑F
i
rres
r
4.
F = m⋅a
res
* ? * besteht das System aus weiteren Teilen?
* ? * verbleiben noch unbekannte Größen
(innere Kräfte zwischen Teilen)
«
×
×
×
®
1.. 4
für andere (Teil-)
Körper wiederholen!
Beispiele für Anw. der Newton-Gesetze:
Bsp. 0.)
Warum bleibt der Körper "B." in Ruhe, obwohl auf ihn
die Gewichtskraft m g wirkt? Welche anderen Kräfte
wirken auf das B. ? Wie groß ist die resultierende Kraft?
mg
Bsp. 1.)
Warum bleibt das Buch in Ruhe, obwohl
r
auf das Buch die Kraft FProf wirkt?
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.3/16
Antw.: Es wirken insges 4 Kräfte auf das
Buch ein (welche? warum? welche
Richtung haben diese Kräfte?), die sich
vetoriell zu Null addieren!
⎛ 0⎞
r ⎜ ⎟
r
r
Fres = FProf + K + K + K = 0 = ⎜ 0⎟
⎜ ⎟
⎝ 0⎠
r
r
r
r
Fres = 0 ⇒ a = 0 !
FProf
Bsp. 2.)
3 Körper, mit Seilen/Stangen verbunden, an Körper a wird mit Kraft F gezogen.
Berechnen Sie die Beschleunigung a und die Seilkräfte!
?
? ?
mc
mb
?
F
ma
Bezeichnen Sie die Kräfte in der Skizze! (F1, -F1 etc.)
Welche Kräfte wirken auf
Körper a ? ________________
Körper b ? ________________
Körper c ? ________________
Newton II für ...
KKK= ma ⋅ a
a)
b)
KKK= mb ⋅ a
KKK= mc ⋅ a
c)
__________________________________
Summe:
KKK = (ma + mb + mc ) ⋅ a
Daraus ergibt sich
die Beschleunigung a zu:
a= ...................................
sowie die "inneren Kräfte"
F1 = ...........................
und
F2 = ..........................
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.4/16
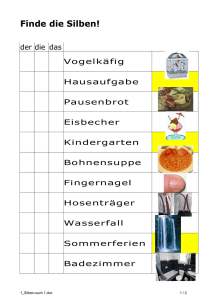
Bsp. 3.)
Ein Fahrzeug durchfährt einen "Looping" (R = 20 m) mit konst. Geschwindigkeit
r
r
a.)
v = 10 m / s ( b.) v = 20 m / s )
•
•
•
Bestimmen Sie den Geschwindigkeits- und den Beschleunigungs-Vektor in den
Positionen A, B, C u. D!
Bestimmen Sie jeweils den Vektor der auf eine im Fahrzeug sitzende Person
r
(m = 150 kg ) wirkenden resultierenden Kraft F !
res
K
r
F =K+K
Welche einzelnen Kräfte wirken auf m ?
K
res
Bestimmen Sie jeweils den Kraft-Vektor (x-,y- Komp.) sowie den Betrag der Kräfte!
C
B
y
x
D
A
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.5/16
1.2.2 Lösung der Bewegungsgleichung
Kraft gegeben Ö Bewegung gesucht
KRAFTGESETZ:
Kraft abhängig von
r r r r
F = F(r , v , t,K)
Ort, Geschwindigkeit, Zeit, ...
Bewegung:
r r
gesucht ist Fkt. r = r ( t )
r
r
⎞
d2 r r ⎛ r d r
m⋅
= F⎜ r ,
, t ,K⎟ (*)
⎝ dt
⎠
d t2
Grundgesetz der Mechanik: (Newton II
[Gl.1.2.5.]
r r
m⋅a = F )
Bem. zu Gl (*):
• V e k t o r gleichung, statt drei Gl.( Fx , Fy, Fz ) nur eine Gl.!
•
•
"gesucht" , d.h. L ö s u n g d e r G l . ist nicht (nur) eine Zahl,
⎛ x ( t )⎞
⎜
⎟
r
sondern eine F u n k t i o n r ( t ) = ⎜ y( t )⎟
⎜
⎟
⎝ z( t ) ⎠
r
Die Gleichung enthält neben der gesuchten Funktion r ( t ) deren
r
r
d r d2 r
Ableitungen
Ö
,
d t d t2
D ifferential G L eichung ( DGl )
42mm
Die "Grundaufgabe" der Dynamik des Massepunkts ist,
die DGl (*) zu lösen!
Die Lösung dieser DGl ist …
•
sehr einfach
r
r
r
F = const. , z.B. F = m ⋅ g
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.6/16
r
d2 r
r
= m⋅g
m⋅
d t2
r
dr
r r
⇒
= gt + v
0
dt
r
r
r
r
⇒
r = 1 gt 2 + v t + r
2
0 0
mg
) Lsg. der DGl. ist nicht eindeutig (⇒ Integrationskonstanten!); aus der Menge der
mathematisch möglichen Lösungen muß die herausgefischt werden, die bestimmte
Anfangsbedingungen erfüllt!
oder …
• einfach
d2 x
m
= −c ⋅ x
d t2
m
⎞
⎛ c
⇒ x( t ) = a ⋅ cos⎜
⋅t + ϕ ⎟
0
⎠
⎝ m
oder aber …
• nicht ganz so einfach
mm r
r r
Gravitation: F(r ) = −γ 1r 2 e
r2 r
⇒ Satelliten-/ Planetenbahnen
(Kreis, Ellipse, Hyperbel, Parabel)
´
r
v
jedoch in manchen Fällen …
• wirklich so ganz einfach nun doch wieder nicht …- wenn man als Hilfsmittel nur Bleistift/
Papier/ Papula zur Verfügung hat -
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.7/16
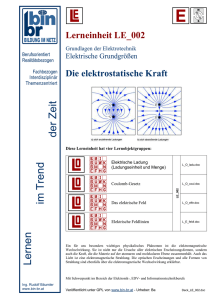
Bsp.: Röntgenbildverst.,
Bahn der Elektronen im
inhomogenen elektr.
Feld ⇒numerisch
berechnet!
einfallende
Röntgenstrahlung
Elektronenbahnen Elektroden der
Elektronenoptik
Ausgangsleuchtschirm
0V
Anodenspannung
+25 bis + 35 kV
Photokathode
Weitere Beispiele / Übungsaufg., bei denen sich DGl ergeben, die noch „zu Fuß“ lösbar sind :
• alle Arten von harm. Oszillatoren (Pendel, U-Rohr, Masse + x-Federn, … ;
siehe auch Kap. Schwingungen und Wellen!)
• Seil, Papierblatt o.ä, rutscht vom Tisch
• Körper wird durch viskose Reibung gebremst (Reibungskraft prop. zu v)
…
1.2.3. Dynamik der Drehbewegung
Kraft wirkt auf
a)
„drehbaren“ Körper
• warum kommt es auf den
Angriffspunkt der Kraft
an ?
• wann fängt der Körper an,
sich zu drehen ,
wann nicht?
F
b)
F
• Wenn eine Kraft F auf Körper wirkt, der Körper sich aber nicht „bewegt“, so muß nach
r
r
Newton II noch (mindestens) eine weitere Kraft wirken, so daß Fres = 0 ! Welche Kraft ist
das ? ..................................................................
F1
Kräftepaar:
r r r
Es sei F1 + F2 = 0 , trotzdem „bewirken“ die Kräfte etwas
der Körper dreht sich!
• Bei ausgedehnten (nicht punktförmigen!) Körpern
kommt es auf den Punkt an, an dem eine Kraft
angreift.
r d pr
• Grundgesetz der Dynamk (N. II) war … F =
dt
r
r
(spez. falls m=const. Ö F = ma ) …
F2
• Brauchen für Drehbew. Größen, die Kraft bzw. „Bewegungsgröße“ (Impuls) entsprechen,
aber den Angriffspunkt berücksichtigen …
• Eine Vektorgröße, die Kraft und Angriffspunkt zusammenfaßt ist das …
r r r
Drehmoment M = r × F
[Gl.1.2.6.]
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.8/16
Ö Mathe-Formelsammlung Ö Regeln für Vektorpr.
r r r r
rr
r r
Ö M⊥r , M⊥F , (wenn F r ⇒ M = 0)
• Analog wird eine (Dreh-) Bewegungsgröße definiert :
r r r
Drehimpuls L = r × p
[Gl.1.2.7.]
r
Bem.: Beide Definitionen enthalten den Ortsvektor r . Drehmoment u. Drehimpuls sind damit
abhängig von der Wahl eines Koordinatensystems. Meistens ist es sinnvoll, den Ursprung auf
die Drehachse zu legen!
Bsp. – „Punkt“ mit festem Abstd. v. Drehachse auf Kreisbahn:
r r r
v = ω×r
r r r r
r r r
r
L = r × p = r × (mv ) = m ⋅ r × (ω × r )
r2 r
r r
= m r ⋅ ω (da r ⊥ω !)
r
v
L ist also wie ω ein Vektor; Richtung (hier!): Drehachse !
r
2 r
L = mR
{ ⋅ ω , J ist das Trägheitsmoment.
ω
v
m
r
J
Für eine Punktmasse, die sich im Abstand R von der Drehachse bewegt, gilt:
J = mR2
[Gl.1.2.8.]
¾ Bei ausgedehnten Körpern ist die Berechnung von J = … etwas komplizierter, es muß über
das Volumen den Körpers integriert werden (Æ starrer
Körper)!
r
r r
r
r
d L d(r × p) d r r r d p r
¿ Ändert sich der Drehimpuls mit der Zeit ? =
=
× p+r ×
=M
dt
dt
dt
dt
{
123
r
r r
=vr × mv
=F
=0
Ö Ja, wenn ein Drehmoment wirkt !
r
r
dL
=M
dt
[Gl.1.2.9.]
r
r
r
r
r
d( J ⋅ ω ) r
r
dω r
= M . Wenn J konstant ist : J
= M bzw. M = J ⋅ α
Mit L = J ⋅ω ergibt sich
dt
dt
Vergleich
Ortsvektor
r
r
Translation
Geschwindigkeit
Beschleunigung
r
Kraft F
Masse m
r r
v = r&
r r r
a = v& = &&
r
r
r
Impuls p = m ⋅ v
r r
F = p&
r
r
(F = m ⋅ a
falls m konst.!)
Rotation
Winkel ϕ
Winkelgeschw. ω = ϕ&
r
(ω Drehachse!)
r r&
&&
Winkelbeschleunig. α = ω& = ϕ
(α = ω
)
r r r
Drehmoment M = r × F
(Massen-)Trägheitsmoment J
(Massenpkt. Ö J = mR2 )
r r r
Drehimpuls L = r × p
r
r
L = J ⋅ω
r r&
M=L
r
r
( M = J ⋅ α falls J konst. !)
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.9/16
1.2.4 Anwendungsbsp. der Newton-Gesetze
1.2.4.1
Ö
Schiefe Ebene
m
Bew.-Richtung
FN
mg
θ
FG|
Auf den Körper wirken 2 Kräfte:
1. Gewichtskraft mg
2. Normalkraft der „Unterlage“
(senkr. auf Ebene – keine Reibung!)
Æ Gewichtskraft aufspalten in
long./transv. Komp.
FG||
θ
mg
θ
FN
trans. Komp. wird durch FN kompensiert
resultierende Kraft = FG||
FG||=Fres=mgsinθ
FG||=Fres
FG|
a = gsinθ
1.2.4.2
Kräfte in Seilen,
Treibriemen, Ketten etc.
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.10/16
a.)
Seil mit Masse:
F = F − F = ma
res
1 2
F −F
a= 1 2
m
[Gl.1.2.10.]
+
F2
Wähle
„Zählrichtung“ +
Seilrichtung
F1
= Kraftrichtung!!
(beachte Vorzeichenwahl!)
F > F ⇒ a > 0 (→)
1 2
F < F ⇒ a < 0 (←)
1 2
b.)
"masseloses"Seil (Masse des Seils vernachlässigbar gegen "Last")
F = F − F = 0⋅a = 0!
res
1 2
⇒F =F !
1
2
[Gl.1.2.11.]
Kraft im "masselosen" Seil ist an beiden Enden gleich! (= „Seilkraft“, „Zugkraft“ : FS, T )
c.) Seile und Rollen
(Masse v. Seil u. Rolle vern.!)
N. II:
F
= F −m g= m a
c
1
s
1
1
res
d
F
= m g−F = m a
2
2
s
2
res
Warum ist a beidesmal gleich ? Was ändert sich, wenn
"lose Rollen" mit ins Spiel kommen?
( m2 − m1) g = ( m1 + m2 ) a
+
Fs
m1
m −m
1 ⋅g
⇒a= 2
m +m
1
2
a einsetzen in c:
Fs
m1g
⎞
⎛m −m
1 + 1⎟ ⋅ g
F = m ( a + g) = m ⎜ 2
⎟
1
1⎜ m + m
s
⎝ 1
2 ⎠
m2
m2g
mm
= 2 1 2 ⋅g
m +m
1
2
[Gl.1.2.12.]
1.2.4.3 Reibungskräfte
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.11/16
a.)
•
•
•
äußere Reibung
Reibung an der Grenzfläche zw. 2
Körpern A u. B
abhängig von …
♦ Materialien A u. B
♦ Oberflächenbeschaffenheit
(trocken, feucht, geölt, poliert,
aufgerauht …
♦ Normalkraft FN
unabhängig von der Fläche !
(warum ?)
FN
A
B
F
kr FH HN
1999
Bemerkung:
Das (anschauliche) Bild einer rauhen Oberfläche sollte nicht so interpretiert werden, daß
die Reibungskraft allein dadurch zustande kommt, daß „Höhenunterschiede“ überwunden
werden müssen. Vielmehr spielen elektrische Kräfte zwischen den Atomen an der
Oberfläche (chem. Bindungskräfte) eine viel größere Rolle bei der Entstehung der
Reibungskräfte!
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.12/16
2 Spezialfälle:
I
Kraft F auf A kleiner als Grenzwert, Körper A beweget sich nicht, Kraft F und
Reibungskraft F kompensieren sich,
R
⇒ A u. B haften aneinander bis F ein Maximum überschreitet:
Haftreibung
r
r
F =µ ⋅F
R
H N
[Gl.1.2.13.]
r
r
F =µ ⋅F
R
G N
[Gl.1.2.14.]
II Körper gleiten:
Gleitreibung
r
F :
N
Warum stehen hier "Betragsstriche" ?
Normalkraft, z.B.
r
F =m g
N
A
r
F = m g ⋅ cos θ
schiefe Ebene:
N
A
bei äußerer Reibung: Reibungskraft F (näherungsweise) unabhängig von der
R
Geschwindigkeit, F (allein oder zusammen mit anderen konstanten Kräften) ⇒ gleichf.
R
beschleunigte Bewegung!
µ <µ !
G
H
Gewicht des Körpers A:
•
•
µ
Stoffpaar
Stahl - Stahl
Stahl - Holz
Gummi-Asphalt
Gummi - Eis
µ
H
G
HaftGleitReibungszahl
0.15
0.03 .. 0.12
0.5 .. 0.6
0.2 .. 0.5
0.65
0.50
0.20
0.15
v0
b.) innere Reibung
•
•
Reibung bei Verformung im
Innern eines (festen, flüssigen
oder gasförmigen) Körpers!
geschwindigkeitsabhängig,
( v = 0 ⇒ F = 0 ),
R
⇒ i. allg. keine gleichf.
beschleunigte Bewegung!!!
FR ∝ v0
F =
R
Öl
v
0
η
⋅
A
⋅
{
D
Viskosität
(A: Fläche der Platte)
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
D
[Gl.1.2.15.]
S.13/16
v
Innere Reibung in Festkörpern Bsp. Feder:
• statisch: Fel = −c ⋅ s
• bei Bewegung: ⇒Draht wird gebogen ⇒
zusätzliche Reibungskraft (innere Reibung im Draht)
[Gl.1.2.16.]
FR = − b ⋅ v
Innere Reibung
Ö
spez. „Newton’sche Reibung“ :
c.)
abhängig von der Geschwindigkeit !
FR ∝ v
v
turbulente Reibung
in Strömungen
Strömung ⇒ Wirbelbildung ⇒ Reibungskraft F ∝ v2
R
2
1
FR = 2 cwρA ⋅ v
Realität:
Mischung aus
1.2.4.4
äußerer,
innerer ,
F = const.
R
F ∝v
R
[Gl.1.2.17.]
turbulenter Reibung!
F ∝ v2
R
Federkräfte
elastische Kräfte
Fa=0
s
Fa
Fel
elastischer Bereich :
Kraft ∝
Deformation
("Hookesches Gesetz") F ∝ s
r
elast. Kraft der Feder wirkt Auslenkung s entgegen:
r
r
F = −c ⋅ s
el
[Gl.1.2.18.]
c (oft auch: D): "Federkonstante", "Richtgröße" , [c] = N/m
r
r
F = −F
a
el
r
r
⇒ F = +c ⋅ s
a
[Gl.1.2.19.]
Anw.: Kraft-, Druckmessung etc. (Federwaage)
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.14/16
Lineares Kraftgesetz:
•
Deformation …
•
Längenänderung …
•
Winkel …
∝ Kraft (bzw. Drehmoment)
3 Beispiele für "lin. Kraftgesetz":
a.) Blattfeder F ∝ s
F
s
b.) "Schneckenfeder":
F ∝ϕ
bzw. mit Drehmoment: M = F ⋅ R
und "Winkelrichtgröße" c* :
M = −c* ⋅ ϕ
F ⋅ R = −c* ⋅ ϕ
Fa
φ
[Gl.1.2.20.]
c.) Torsionsstab:
M = −c* ⋅ ϕ
F ⋅ R = −c* ⋅ ϕ
φ
[Gl.1.2.21.]
F
Parallel- u. Serien-„Schaltung“ von Federn
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.15/16
2 Federn parallel : KRÄFTE addieren sich
F1
( ) ( )
F = F + F = −c s + −c s
1 2
1
2
Fa
(
)
= − c +c s
1 2
= −cs
⇒ c = c +c
1 2
F2
[Gl.1.2.22.]
2 Federn in Serie : Federwege addieren sich
F=0
s1
s2
Fa
⎛1 1⎞
−F −F
s= s +s =
+
= − F⎜ + ⎟
⎜c c ⎟
1 2 c
c
⎝ 1 2⎠
1
2
−F
=
c
1 1 1
⇒
= +
c c c
1 2
[Gl.1.2.23.]
1.2.4.5 Dynamik des Masse-Feder-Systems:
Körper mit Trägheit (Masse) bewegt sich unter dem Einfluß einer Federkraft:
von "x" abhängige Kraft ⇒ keine konst. Beschleunigung
… sondern aus II. Newton-Gl. ergibt sich eine DGL (siehe Kap. 1.2.2 !)
Lösung : HARMONISCHE OSZILLATOR
(s. auch „Schwingungen und Wellen“!)
Physik_1_2_Dynamik.doc, Prof. Dr. K. Rauschnabel, HHN, 08.05.2006 00:04
S.16/16