ein Skript - Universität Konstanz
Werbung

Dr. Florian Berchtold
Geometrie für Lehramtskandidaten
Vorlesung an der Universität Konstanz
Inhaltsverzeichnis
Inhaltsverzeichnis
1
Abbildungsverzeichnis
5
1 Einleitung
7
I
8
Ebene Geometrie
2 Axiomatik
9
2.1
Das Axiomensystems Euklids . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
2.2
Hilberts Axiome . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1
Axiome der Verknüpfung (Inzidenz) . . . . . . . . . . . . . . . . . . . . . 12
2.2.2
Axiome der Anordnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.3
Kongruenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.4
Parallelität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2.5
Vollständigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Klassische euklidische Geometrie
20
3.1
Ein Modell der euklidischen Geometrie . . . . . . . . . . . . . . . . . . . . . . . 20
3.2
Grundlegende Aussagen der Mittelstufengeometrie . . . . . . . . . . . . . . . . . 26
3.3
Abbildungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.4
Sätze über Polygone am Kreis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2
INHALTSVERZEICHNIS
3.5
Besondere Punkte im Dreieck . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.6
Weitere Sätze am Dreieck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4 Nicht-Euklidische Geometrien
4.1
Grundlagen der sphärischen Geometrie . . . . . . . . . . . . . . . . . . . . . . . 46
4.2
Dreiecke in der sphärischen Geometrie . . . . . . . . . . . . . . . . . . . . . . . 50
4.3
Geometrie in der komplexen Zahlenebene . . . . . . . . . . . . . . . . . . . . . . 58
4.4
Der hyperbolische Abstandsbegriff . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.5
Das Halbebenenmodell der hyperbolischen Ebene . . . . . . . . . . . . . . . . . 69
4.6
Hyperbolische Trigonometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.7
Hyperbolische Parallelen und Abstände . . . . . . . . . . . . . . . . . . . . . . . 77
4.8
Alternative Modelle für hyperbolische Geometrien . . . . . . . . . . . . . . . . . 83
5 Konstruierbarkeit
II
46
86
5.1
Konstruierbare Zahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5.2
Quadratwurzeltürme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Geometrie in höheren Dimensionen
6 Polytope
90
91
6.1
Konvexität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
6.2
Polytope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
6.3
Graphen von Polytopen und die Eulersche Polyederformel
6.4
Ergänzungen zur Graphentheorie . . . . . . . . . . . . . . . . . . . . . . . . . . 107
7 Bilinearformen und Kegelschnitte
. . . . . . . . . . . . 102
111
7.1
Bilinearformen
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
7.2
Kegelschnitte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
3
8 Geometrische Topologie und Transformationsgruppen
121
8.1
Topologie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
8.2
Gruppenoperationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
8.3
Mannigfaltigkeiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
8.4
Gruppenoperationen auf dem Rn . . . . . . . . . . . . . . . . . . . . . . . . . . 129
8.5
Symmetriegruppen von Polytopen . . . . . . . . . . . . . . . . . . . . . . . . . . 131
8.6
Untergruppen der speziellen linearen Gruppe . . . . . . . . . . . . . . . . . . . . 133
Abbildungsverzeichnis
2.1
Eine Tisch-Stuhl-Situation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2
Zum Beweis des Streckensatzes 2.2.8 . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3
Zum Beweis des Nebenwinkelsatzes 2.2.22 . . . . . . . . . . . . . . . . . . . . . 17
2.4
Existenz von Parallelen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.1
Der Strahlensatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2
Zum Beweis des Winkelsummensatzes 3.2.3 . . . . . . . . . . . . . . . . . . . . . 27
3.3
Der Peripherie-Winkel-Satz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.4
Der Sehnensatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.5
Satz von Ptolemaios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.6
Satz von Menelaos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.7
Satz von Ceva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.8
Die Mittelpunkte“ eines Dreiecks . . . . . . . . . . . . . . . . . . . . . . . . . . 40
”
3.9
Die Eulersche Gerade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.10 Der Neunpunktekreis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.11 Satz des Euklid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.1
Kugelkoordinaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2
Ein Eulersches Dreieck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.3
Das Poldreieck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.4
Die Riemannsche Zahlenkugel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
ABBILDUNGSVERZEICHNIS
5
4.5
Zur Doppelverhältnisformel 4.4.15 . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.6
Ein hyperbolisches Dreieck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.7
Ein Dreieck in kanonischer Lage . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.8
Zwei verbindbare Geraden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.9
Randparallelen zu g durch P mit weiteren Parallelen . . . . . . . . . . . . . . . 79
4.10 Ein hyperbolisches Dreieck ohne Umkreis . . . . . . . . . . . . . . . . . . . . . . 81
4.11 Ein Saccherisches Viereck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
6.1
Ein Graph mit mindestens vier Farben samt Landkarte . . . . . . . . . . . . . . 108
7.1
Zum Beweis von 7.2.8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
7.2
Zum Beweis von 7.2.10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Kapitel 1
Einleitung
Das vorliegende Skript entstand aus den Notizen zu einer Vorlesung zur Einführungen in die
Geometrie für angehende Lehrer, die ich an der Universität Konstanz gehalten habe. Ziel war es,
angehenden Lehrern fachwissenschaftliche Grundlagen speziell für den Geometrieunterricht zu
geben. Einerseits sollte dabei der Zielsetzung, angehende Lehrer direkt auf den Unterricht vorzubereiten, Rechnung getragen werden, andererseits sollte der geradezu sprichwörtliche Blick
”
über den Tellerrand“ auch nicht vernachlässigt werden. Dabei steht in diesem Skript die ebene
Geometrie im Fokus des Interesses.
Gerade die Geometrie mit ihrer mehrtausendjährigen Geschichte eignet sich besonders dazu,
Wissenschaftsentstehung und die Problematik einer korrekten Grundlagenlegung eingehend zu
studieren. In diesem Skript gehen wir daher von dem Axiomensystems Euklids aus, welches
über Jahrhunderte die Vorstellung von Geometrie geprägt hat. Anschließend betrachten wir
das modernere System D. Hilberts, der zu Beginn des 20. Jahrhunderts versucht hat, die Geometrie auf eine neue solide Grundlage zu stellen. Um aber einer praktischen Umsetzung im
Schulunterricht nicht im Wege zu stehen, wird die klassische Geometrie im euklidischen Modell
des R2 zusammen mit dem Skalarprodukt als Messinstrument“ entwickelt. Dabei werden auch
”
einige Ergebnisse der Euklidischen Geometrie besprochen, die so leider nicht mehr im aktuellen
Lehrplan verankert sind, dennoch aber für ein tieferes Verständnis der Schulgeometrie äußerst
nützlich sind.
Schließlich gehen wir auch noch auf die so genannten nicht-euklidischen Geometrien ein, in
denen das Parallelenaxiom nicht erfült ist. Wegen ihrer vielfältigen Anwendung in Luft- und
Schifffahrt streifen wir dabei kurz die sphärische Geometrie, auch wenn sie nicht ganz mit der
Hilbertschen Axiomatik zusammenpasst. Etwas ausführlicher studieren wir die hyperbolische
Geometrie auf der Grundlage des Halbebenenmodells nach Poincarè.
Dank möchte ich sagen allen Studierenden, die mit diesem Skript gearbeitet und mich auf
zahlreiche Fehler und Ungenauigkeiten hingewiesen haben. Besonderer Dank geht an Herrn
Christoph Klockewitz, der mich bei den Übungen zu dieser Vorlesung unterstützt hat. Weiter möchte ich Herrn Michael Arendt danken, der einige Ideen insbesondere zur Möglichkeit,
hyperbolische Geometrie im Unterricht einzusetzen, beigesteuert hat.
Teil I
Ebene Geometrie
Kapitel 2
Axiomatik
Geometrische Fragestellungen lassen sich in der Geschichte der Mathematik bis weit in die
frühesten menschlichen Kulturüberlieferungen zurückverfolgen. Bereits in alten ägyptischen
Aufzeichnungen (Papyrus Rhind, ca. 1600 vor Christus, wahrscheinlich eine Abschrift eines
zweihundert Jahre älteren Papyrus) werden Fragen zu Dreiecken und Kreisen behandelt. Mit
dem Einsetzen der griechischen Mathematik findet sich eine entscheidende Zäsur: Im Vordergrund steht nicht mehr die Frage, wie etwas geht, sondern warum und welche Grundlagen man
voraussetzen kann. Es wurde das erste Axiomensystem für Geometrie geschaffen. Wir werden
uns in diesem Kapitel mit der Axiomatik der Geometrie auseinandersetzen und betrachten dazu zunächst dieses erste Axiomensystem der Antike, bevor wir dann auf das seit gut hundert
Jahren verwendete moderne Axiomensystem David Hilberts eingehen.
2.1
Das Axiomensystems Euklids
Etwa 300 vor Christus fasste der in Alexandria lebende griechische Mathematiker Euklid die
damals bekannte Mathematik in 13 Büchern zusammen, denen er den Namen Die Elemente“
”
(τ α στ oιχεία) gab. In diesen Büchern versuchte er, die gesamte Geometrie aus einigen anschaulich evidenten Grundaussagen — den Axiomen — zu entwickeln. Im Folgenden stellen wir
diese Grundaussagen Euklids zusammen. Wir formulieren zunächst seine Definitionen, die wir
[19] entnehmen:
Definitionen
1. Ein Punkt ist, was keine Teile hat;
2. eine Linie breitenlose Länge.
3. Die Enden einer Linie sind Punkte.
4. Eine gerade Linie ist eine solche, die zu den Punkten auf ihr gleichmäßig liegt.
10
Axiomatik
5. Eine Fläche ist, was nur Länge und Breite hat.
6. Die Ende einer Fläche sind Linien.
7. Eine ebene Fläche ist eine solche, die zu den geraden Linien auf ihr gleichmäßig liegt.
8. Ein ebener Winkel ist die Neigung zweier Linien in einer Ebene gegeneinander, die einander treffen, ohne einander gerade fortzusetzen.
9. Wenn die einen Winkel umfassenden Linien gerade sind, so heißt der Winkel geradlinig.
10. Wenn eine gerade Linie, auf eine gerade Linie gestellt, einander gleiche Nebenwinkel bildet,
dann ist jeder der beiden gleichen Winkel ein Rechter; und die stehende gerade Linie heißt
senkrecht zu der, auf der sie steht.
11. Stumpf ist ein Winkel, wenn er größer als ein Rechter ist,
12. spitz, falls er kleiner als ein Rechter ist.
13. Eine Grenze ist etwas, worin etwas endigt.
14. Eine Figur ist, was von einer oder mehreren Grenzen umfaßt wird.
Wir brechen hier ab: Euklid defininiert dann noch Kreise, Dreiecke und Vierecke als spezielle
Figuren und nennt abschließend zwei in derselben Ebene liegende gerade Linien als parallel,
falls sie, wenn man sie nach beiden Seiten unendlich verlängert, auf keiner einander treffen.
Im nächsten Schritt werden Postulate, also Forderungen formuliert:
Postulate
Gefordert soll sein,
1. dass man von jedem Punkt nach jedem Punkt die Strecke ziehen kann,
2. dass man eine begrenzte gerade Linie zusammenhängend gerade verlängern kann,
3. dass man mit jedem Mittelpunkt und Abstand den Kreis zeichnen kann,
4. dass alle rechten Winkel einander gleich sind,
5. Und dass, wenn eine gerade Linie beim Schnitt mit zwei geraden Linien bewirkt, dass
innen auf derselben Seite entstehende Winkel zusammen kleiner als zwei Rechte werden,
dann die zwei geraden Linien bei Verlängerung ins unendliche sich treffen auf der Seite,
auf der die Winkel liegen, die zusammen kleiner als zwei Rechte sind.
Axiome
1. Was demselben gleich ist, ist auch einander gleich.
2.2 Hilberts Axiome
11
2. Wenn Gleichem Gleiches hinzugefügt wird, sind die Ganzen gleich.
3. Wenn von Gleichem Gleiches weggenommen wird, sind die Reste gleich.
4. Wenn Ungleichem Gleiches hinzugefügt wird, sind die Ganzen ungleich.
5. Die Doppelten von demselben sind einander gleich.
6. Die Halben von demselben sind einander gleich.
7. Was einander deckt, ist einander gleich.
8. Das Ganze ist größer als der Teil.
9. Zwei Strecken umfassen keinen Flächenraum.
Die Elemente Euklids und damit sein Axiomensystem haben über 2000 Jahren das geometrische Denken entscheidend geprägt, obwohl an vielen Stellen Kritik geübt wurde. Üblicherweise
erwartet man von einem Axiomensystem, dass es in sich widerspruchsfrei und die einzelnen
Axiome unabhängig voneinander sind.
2.1.1 Aufgabe Man untersuche die Axiome Euklids auf Unabhängigkeit.
Besondere Kritikpunkte waren zum Einen, dass die Formulierungen keiner heutigen Strenge
genügen. So werden Begriffe durch andere unbekannte Begriffe definiert oder vage sprachliche
Aussagen gemacht, die keine präzise Bedeutung haben. Zum Anderen entzündete sich die meiste Kritik an wohl Euklids größter Leistung, dem Postulat 5 (in anderen Quellen Axiom 11):
Generationen von Mathematikern versuchten, dieses Axiom aus den anderen zu folgern und damit zu zeigen, dass es nicht unabhängig ist. Erst im 19. Jahrhundert gelang es N. Lobatschewski
und J. Bolyai unabhängig voneinander mit der Entdeckung der so genannten nicht-euklidischen
Geometrien nachzuweisen, dass das Parallelenaxiom in der Tat unabhängig von den anderen
Axiomen ist. In einer modernen Form kann man man das Parallelenaxiom auch einfacher formulieren:
2.1.2 Axiom Zu einem Punkt ausserhalb einer Gerade gibt es genau eine Gerade durch diesen
Punkt, die die gegebene Gerade nicht schneidet.
2.2
Hilberts Axiome
Die Unzufriedenheit mit den Euklidischen Axiomen führte zu vielen Versuchen, eine neue befriedigerende Axiomatik für die Geometrie aufzustellen. Hilbert hatte schließlich die grundlegende
Idee, die Axiome losgelöst von realen Objekten zu formulieren, sondern vielmehr die Beziehungen zwischen den Objekten ins Zentrum der Betrachtung zu stellen. Die Art der Objekte
spielte also keine Rolle mehr, sondern nur ihr Verhältnis zueinander. Hilbert selbst soll das
so formuliert haben: Man müsse statt Punkte, Geraden und Ebenen“ jederzeit auch Tische,
”
”
Stühle und Bierseidel“ sagen können; es komme nur darauf an, dass die Axiome erfüllt sind
(vgl. [12]).
12
Axiomatik
2.2.1
Axiome der Verknüpfung (Inzidenz)
Wir werden im Folgenden die Axiome Hilberts vorstellen und an einigen Stellen bereits einige
Folgerungen aus den Axiomen ziehen. Dazu betrachten wir zwei Mengen P (Punkte) und G
(Geraden) und eine Relation R zwischen diesen (streng genommen ist R also eine Teilmenge
R ⊂ P×G). Diese Beziehung braucht keine mengentheoretische Enthaltensbeziehung zu sein. In
der klassischen Schulsituation ist natürlich diese Beziehung genau die Tatsache, dass ein Punkt
auf einer Geraden liegt. Wir schreiben daher auch einfach P ∈ g, falls (P, g) ∈ R ⊂ P × G gilt.
Für diese Situation fordern wir
2.2.1 Axiom
1. Zu zwei verschiedenen Punkten A, B ∈ P gibt es genau eine Gerade g ∈ G,
so dass A und B zu g gehören: A, B ∈ g. Für diese Gerade schreiben wir oft kurz g = AB.
2. Zu jeder Gerade gehören mindestens zwei Punkte.
3. Es gibt drei Punkte, die nicht zu einer Gerade gehören, d.h. es gibt drei Punkte und eine
Gerade, die nicht alle diese Punkte enthält.
Ein Paar (P, G) zusammen mit einer Inzidenzrelation, sodass diese drei Eigenschaften erfüllt
sind, nennen wir auch einen linearen Raum.
2.2.2 Aufgabe Es sei (P, G) ein linearer Raum. Man zeige:
1. Ist g ∈ G eine Gerade, so gibt es einen Punkt P ∈ P, der nicht zu g gehört.
2. Zu jedem P ∈ P gibt es mindestens zwei Geraden g1 6= g2 , zu denen P gehört.
Das dritte Verknüpfungsaxiom besagt anschaulich, dass die geforderte Geometrie mindestens
zweidimensional ist.
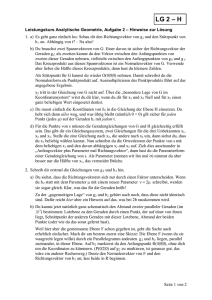
2.2.3 Beispiel Wir betrachten einen Raum mit drei Tischen und drei Stühlen, der wie der
Abbildung 2.1 bestuhlt sei. Dann gehöre ein Stuhl zu einem Tisch, wenn er an einer Seite des
Tisches angrenzt. Beispielsweise gehört der Stuhl unten in der Mitte zu den beidenn seitlichen
Tischen. Dann sind die Axiome aus 2.2.1 erfüllt.
2.2.4 Aufgabe Man zeige das Beispiel 2.2.3.
Ist im Fall eines linearen Raumes (P, G) die Menge P endlich, so nennt man den Raum einen
endlichen linearen Raum. Zu welchen Mengen P und G derartige Räume existieren, ist ein
aktuelles Forschungsthema. Für mehr Informationen zu dieser Fragestellung verweisen wir den
Leser auf [5].
2.2.2
Axiome der Anordnung
Die zweite Axiomengruppe befasst sich mit den Anordnungsaxiomen. Dazu sei Z ⊂ P × P ×
P eine weitere Relation zwischen“. Man sagt dann, dass P zwischen A und B liegt, falls
”
(A, P, B) ∈ Z gilt. Dafür schreibt man oft einfach auch P ∈ AB und definiert:
2.2 Hilberts Axiome
13
Abbildung 2.1: Eine Tisch-Stuhl-Situation
2.2.5 Definition Sind A, B ∈ P, so versteht man unter der Strecke AB alle Punkte, die
zwischen A und B liegen.
Man fordert nun
2.2.6 Axiom
1. Liegt C zwischen A und B (C ∈ AB), so sind A, B und C drei verschiedene
Punkte einer Geraden und C liegt dann auch zwischen B und A (C ∈ BA).
2. Zu zwei verschiedenen Punkten A und C gibt es einen Punkt B auf der Geraden AC,
sodass C zwischen A und B liegt.
3. Sind drei Punkte einer Geraden gegeben, so liegt höchstens einer davon zwischen den
beiden anderen.
Man beachte, dass nach 2.2.6 1. die Strecken AB und BA übereinstimmen; weiter liegen alle
Punkte der Strecke AB auf der Geraden AB.
Das erste etwas kompliziertere Axiom ist das Axiom von Pasch, welches im wesentlichen besagt, dass die betrachtete Geometrie nicht mehr als zwei Dimensionen besitzt, also eine ebene
Geometrie ist.
2.2.7 Axiom Es seien A, B und C drei Punkte, die nicht zu einer Gerade gehören und g
eine Gerade, zu der keiner der drei Punkte A, B und C gehört und die durch einen Punkt der
Strecke AB geht. Dann geht g entweder durch einen Punkt der Strecke AC oder durch einen
Punkt der Strecke BC.
Man mache sich klar, dass dieses Axiom in einer räumlichen Geometrie nicht erfüllt ist. Anschaulich besagt dieses Axiom, dass eine Gerade, die ein Dreieck betritt, dieses auch wieder
verlassen muss. Wir fordern hier (wie Hilbert in seiner Urfassung, vgl. [26] und demgegenüber
die Version in [27], jeweils §3, II.4) explizit, dass die Gerade g nur (also genau) eine der beiden
verbliebenen Dreiecksseiten schneidet. Diese Forderung kann man dahingehend abschwächen,
14
Axiomatik
B
A
Q
P
C
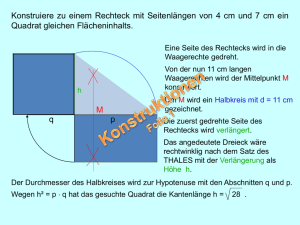
Abbildung 2.2: Zum Beweis des Streckensatzes 2.2.8
dass sie mindestens eine schneidet. Man kann dann zeigen, dass sie die andere nicht schneiden
kann (für Details vgl. [27], Supplement I).
Mit Hilfe dieser Axiome können nun einige Folgerungen über die Beziehungen zwischen Punkten
und Geraden abgeleitet werden. Exemplarisch zeigen wir, dass Strecken nie leer sind, oder,
anders ausgedrückt, dass zwischen zwei Punkten einer Geraden immer ein dritter liegt.
2.2.8 Satz Es seien P, Q ∈ P. Dann gibt es ein S ∈ P, welches zwischen P und Q liegt.
Beweis Es sei A ein Punkt, der nicht auf der Geraden P Q liegt. Nach 2.2.6 2. gibt es einen
Punkt B, sodass A zwischen P und B liegt. Zu B und Q gibt es ebenso einen Punkt C, sodass
Q zwischen B und C liegt. Wir betrachten nun die Gerade AC. Diese kann B nicht enthalten,
da sie sonst auch P und Q enthalten würde und dann A auf P Q läge, was nicht sein kann.
Ebenso sieht man, dass AC weder P noch Q enthält. Also erfüllt die Konfiguration P, Q, B und
die Gerade AC die Voraussetzung des Axioms von Pasch. Daher schneidet sie entweder BQ
oder P Q. Angenommen, sie schneidet BQ in X. Gilt nun X 6= C, so folgt AC = XC = QB,
was aber wie oben gesehen nicht sein kann. Im Fall X = C liegt aber X einerseits zwischen
Q und B und andererseits Q zwischen X = C und B, was einen Widerspruch liefert. Also
schneidet AC die Seite P Q in einem Punkt S zwischen P und Q.
2.2.9 Aufgabe Man zeige: Sind A, B und C drei Punkte einer Geraden g, so liegt einer der
Punkte zwischen den beiden anderen.
2.2.3
Kongruenz
Um Kongruenz zu definieren, benötigen wir noch den Begriff der gleichen Seite“.
”
2.2.10 Definition Es seien A, O und B drei Punkte einer Geraden. Wir sagen, dass A und B
auf derselben Seite von O liegen, falls O nicht zwischen A und B liegt. Unter dem Halbstrahl
OA
−→ verstehen wir die Menge aller Punkte auf g, die auf der gleichen Seite von O wie A liegen.
2.2 Hilberts Axiome
15
2.2.11 Lemma Es seien O ein Punkt einer Geraden g und g \ O die Menge der Punkte, die
zu g gehören, mit Ausnahme von O. Dann definiert die Relation A liegt auf der gleichen Seite
”
wie B“ eine Äquivalenzrelation auf g \ O.
Beweis Reflexivität: Es sei A ∈ g. Offenbar liegt O nicht zwischen A und A, also liegt A auf
derselben Seite von O wie A.
Symmetrie: Es liege A auf derselben Seite wie B, d.h. O liegt nicht zwischen A und B. Dann
liegt wegen 2.2.6 1. O auch nicht zwischen B und A, d.h. B liegt auf derselben Seite wie A.
Transitivität: Es liege A auf derselben Seite wie B und B auf derselben Seite wie C, d.h. O
liegt nicht zwischen A und B und O liegt nicht zwischen B und C. Wir wählen einen Punkt
D außerhalb von g. Dann gibt es einen Punkt E, sodass D zwischen E und C liegt. Betrachte
die Gerade OD. Offenbar enthält diese keinen der Punkte A, B oder C, da sie sonst mit g
übereinstimmen würde, im Widerspruch dazu, dass D nicht auf g liegt. Wir betrachten nun
die Konfiguration B, C, E und OD. Da nach Voraussetzung O nicht zwischen B und C liegt,
schneidet OD nach dem Axiom von Pasch die Strecke BE. Wendet man nun das Axiom von
Pasch auf die Konfiguration A, B, E und OD an, so erhält man, dass OD entweder AB oder AE
schneidet. Da O nicht zwischen A und B liegt, liegt der zweite Fall vor. Also schneidet die Gerade
OD in der Konfiguration A, C, E die Strecken EC und AE. Aufgrund der Eindeutigkeitsaussage
des Axioms von Pasch schneidet OD daher die Strecke AC nicht, also liegt O nicht zwischen
A und C.
Man kann sogar zeigen, dass die in 2.2.10 definierte Äquivalenzrelation die Menge g \O in genau
zwei Äquivalenzklassen unterteilt (vgl. [27], §4, Satz 5.).
Auf der Menge aller Strecken möge es eine weitere Relation ≡ ( Kongruenz“) mit folgenden
”
Eigenschaften geben.
2.2.12 Axiom
1. Sind A, B zwei Punkte einer Geraden g und A0 ein Punkt einer weiteren
(nicht notwendig verschiedenen) Geraden g 0 , so gibt es auf einer gegebenen Seite der
Geraden g 0 von A0 einen Punkt B 0 , sodass die Strecke AB kongruent zur Strecke A0 B 0 ist.
2. Die Kongruenzrelation ist transitiv, genauer gilt, sind zwei Strecken zu einer dritten kongruent, so sind sie selbst kongruent.
3. Gehören die Punkte A, B, C zu einer Geraden g, die Punkte A0 , B 0 , C 0 zu einer Geraden
g 0 , wobei AB und BC bzw. A0 B 0 und B 0 C 0 keine gemeinsamen Punkte haben, und gilt
weiter AB ≡ A0 B 0 sowie BC ≡ B 0 C 0 , so gilt auch AC ≡ A0 C 0 .
2.2.13 Aufgabe Man zeige, dass die Kongruenz von Strecken eine Äquivalenzrelation ist (es
macht also Sinn, von kongruenten Strecken zu sprechen).
Die zweite Kongruenzgruppe befasst sich mit Winkeln. Dazu brauchen wir noch den Begriff der
Halbebene:
2.2.14 Definition Es sei g eine Gerade und P ein Punkt nicht auf g. Ein Punkt Q liegt auf
der gleichen Seite von g wie P , falls die Strecke P Q die Gerade g nicht schneidet.
16
Axiomatik
Unter einer durch g definierten Halbebene verstehen wir eine Äquivalenzklasse von Punkten,
die auf der gleichen Seite von g liegen.
2.2.15 Aufgabe Es sei g eine Gerade. Man zeige, dass die Relation liegt auf der gleichen
”
Seite wie“ eine Äquivalenzrelation ist, die die Menge aller Punkte außerhalb von g in genau
zwei Äquivalenzklassen unterteilt.
2.2.16 Definition Unter einem Winkel versteht man ein System bestehend aus zwei Halbstrahlen h und k, die von einem gemeinsamen Punkt O aus starten. Der Punkt O heißt auch
Scheitel und h, k heißen die Schenkel des Winkels. Für einen Winkel schreiben wir ∠(h, k).
Ähnlich wie bei Strecken wird nun ein Abtragungsaxiom gefordert:
2.2.17 Axiom
1. Es seien ∠(h, k) ein Winkel sowie g 0 eine Gerade mit einem Punkt O0 und
einem von O0 ausgehenden Halbstrahl h0 . Dann gibt es auf einer festgelegten Seite von g 0
genau einen von O0 ausgehenden Halbstrahl k 0 , sodass der Winkel ∠(h, k) kongruent zum
Winkel ∠(h0 , k 0 ) ist.
2. Die Kongruenzrelation für Winkel ist reflexiv: Jeder Winkel ist zu sich selbst kongruent.
Das folgende letzte Kongruenzaxiom ist für den Schulunterrricht besonders interessant: Im
Unterricht der Mittelstufe spielen die Kongruenzsätze für Dreiecke eine besondere Rolle. Hilbert
hat festgestellt, dass sich diese nicht aus den Axiomen Euklids herleiten lassen. Man muss also
mindestens einen Kongruenzsatz fordern; dieses ist der Satz sws“. Wir definieren zunächst den
”
Begriff des Dreiecks.
2.2.18 Definition Es seien A, B, C drei Punkte, die nicht auf einer Geraden liegen. Dann
definieren diese drei Punkte ein Dreieck ∆ABC mit den Seiten AB, BC und AC und den
Innenwinkeln
∠BAC := ∠(AB
AC
BC
BC
−→, −
→), ∠CBA := ∠(BA
−→, −
−→) und ∠ACB := ∠(AC
−→, −
−→).
In manchen Situationen betrachtet man auch Dreiecke, bei denen die Ecken“ A, B und C auf
”
einer Gerade liegen und spricht dann von entarteten Dreiecken“. Wir werden, wenn es nicht
”
explizit vermerkt ist, immer unsere Definition verwenden.
2.2.19 Axiom Gelten für zwei Dreiecke ∆ABC und ∆A0 B 0 C 0 die Kongruenzen AB ≡ A0 B 0 ,
AC ≡ A0 C 0 und ∠BAC ≡ ∠B 0 A0 C 0 , so gilt auch ∠CBA ≡ ∠C 0 B 0 A0 .
2.2.20 Aufgabe Man zeige, dass in der Situation von 2.2.19 auch ∠ACB ≡ ∠A0 C 0 B 0 sowie
BC ≡ B 0 C 0 gilt.
Ähnlich wie bei Strecken kann man zeigen, dass die Kongruenz von Winkeln eine Äquivalenzrelation ist. Daher macht es Sinn, von kongruenten Winkeln zu sprechen.
2.2 Hilberts Axiome
17
Mit Hilfe der bisherigen Axiome lassen sich die aus der Schule vertrauten Aussagen wie die
Kongruenz von Neben- und Gegenwinkeln (Scheitelwinkeln) beweisen. Diese werden im Schulunterricht üblicherweise als anschaulich evidente Aussagen formuliert. Hier können wir sie aber
als Folgerungen aus unseren Axiomen formulieren.
2.2.21 Definition Es seien A und B Punkte auf einer Geraden g sowie C ein Punkt außerhalb
von g. Weiter seien D ein Punkt auf g auf der anderen Seite von A sowie E ein Punkt auf
h := AC auf der anderen Seite von A. Dann heißen die Winkel ∠(AC
AD
AE
−→, −
−→) und ∠(AD
−−→, −
→)
Nebenwinkel bzw. Gegenwinkel des Winkels ∠(AB
AC
−→, −
→).
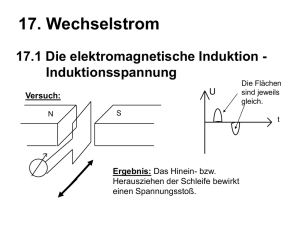
2.2.22 Satz Nebenwinkel kongruenter Winkel sind kongruent.
Beweis
Es seien A, B und D drei Punkte auf einer Geraden, sodass A zwischen B und
D liegt, und C ein Punkt außerhalb von AB. Ebenso seien A0 , B 0 und D0 drei Punkte auf
einer Geraden, sodass A0 zwischen B 0 und C 0 liege. Weiter sei C 0 außerhalb von A0 B 0 , sodass
0 0
0 0
die Winkel ∠(AB
AC
B
,−
A−
C
−→, −
→) und ∠(A
−
−
→
→) kongruent sind. Dann ist zu zeigen, dass auch die
0 0
0 0
Winkel ∠(AC
AD
A−D
−→, −
−→) und ∠(A
−−C
→, −
→) kongruent sind.
Abbildung 2.3: Zum Beweis des Nebenwinkelsatzes 2.2.22
Aufgrund der Möglichkeit, auf einem gegebenen Halbstrahl Strecken abtragen zu können,
können wir annehmen, dass folgende Streckenkongruenzen erfüllt sind:
AB ≡ A0 B 0 , AC ≡ A0 C 0 , AD ≡ A0 D0 .
Wendet man nun die Aufgabe 2.2.20 auf die Dreiecke ABC und A0 B 0 C 0 , so erhält man die
Kongruenzen BC ≡ B 0 C 0 und ∠ABC ≡ ∠A0 B 0 C 0 . Weiter sind aufgrund von 2.2.12 3. die
Strecken DB und D0 B 0 kongruent. Eine erneute Anwendung der Aufgabe 2.2.20 auf die beiden
Dreiecke DBC und D0 B 0 C 0 liefert die Kongruenzen
∠CDA ≡ ∠C 0 D0 A0
und DC ≡ D0 C 0 .
Schließlich folgt nun mit Hilfe des Axioms 2.2.19 angewendet auf die Dreiecke DAC und D0 A0 C 0
die behauptete Kongruenz der Nebenwinkel.
2.2.23 Korollar (Gegenwinkelsatz oder Scheitelwinkelsatz) Gegenwinkel sind kongruent.
Beweis
Dies folgt direkt aus dem Satz 2.2.22, da Gegenwinkel Nebenwinkel des gleichen
Winkels sind.
18
2.2.4
Axiomatik
Parallelität
Wie erwähnt, war das umstrittenste euklidische Axiom das Parallelenaxiom von Euklid. Bevor
das Hilbertsche Analogon formulieren, beweisen wir die Existenz von Parallelen im Hilbertschen
System. Dazu definieren wir zunächst den Begriff der Parallelität.
2.2.24 Definition Zwei Geraden heißen parallel, falls sie keinen gemeinsamen Punkt haben.
2.2.25 Satz Es sei g eine Gerade sowie P ein Punkt, der nicht zu g gehört. Dann gibt es eine
Gerade h, die P enthält und parallel zu g ist.
Abbildung 2.4: Existenz von Parallelen
Beweis Es seien Q, R zwei verschiedene Punkte von g sowie ` die Gerade durch P und Q.
Dann läßt sich der Winkel ∠P QR auf der Geraden ` in P abtragen: Es gibt also einen Punkt
U auf ` sowie einen Punkt T , sodass der Winkel ∠P QR kongruent zum Winkel ∠U P T ist. Wir
behaupten, dass die Gerade h := P T parallel zu g ist. Angenommen, g und h schneiden sich in
einem Punkt S. Dann tragen wir die Strecke SQ ausgehend von P auf h ab, aber nicht auf der
selben Seite wie S. Es gibt also einen Punkt W auf h mit SQ ≡ P W und P liegt zwischen S
und W .
Aufgrund der Kongruenz der Gegenwinkel 2.2.23 sind die Winkel ∠SQP und ∠W P Q kongruent. Wendet man das Kongruenzaxiom 2.2.19 auf die Dreiecke ∆SQP und ∆QW P an, so folgt
∠QP S ≡ ∠P QW . Wegen der Kongruenz der Nebenwinkel 2.2.22 ist daher ∠W QP zum Nebenwinkel von ∠P QS kongruent. Die Eindeutigkeit der Winkelabtragung impliziert nun, dass
W zu g gehört, was offenbar unmöglich ist.
Es gibt somit im Hilbertschen Axiomensystem immer Parallelen. Um nun die euklidische Geometrie zu erhalten, muss man fordern, dass es maximal eine solche gibt:
2.2.26 Axiom Es sei P ein Punkt außerhalb einer Geraden g. Dann gibt es maximal eine
parallele Gerade zu g durch P .
2.2 Hilberts Axiome
2.2.5
19
Vollständigkeit
Die letzten beiden Axiome erlauben, die euklidische Geometrie eindeutig festzulegen. Das erste
beschreibt dabei die in gewissem Sinne beliebige Verlängerbarkeit von Strecken und entspricht
im Prinzip dem archimedischen Axiom der reellen Zahlen:
2.2.27 Axiom Sind AB und CD zwei Strecken, so gibt es eine natürliche Zahl n ∈ N so, dass
das n-malige Abtragen von CD vom Punkt A aus, die Strecke AB enthält.
Zum Abschluss fordert man nun noch, dass die euklidische Geometrie vollständig ist, d.h. es
gibt keine echte Erweiterung des bisher konstruierten Systems.
2.2.28 Axiom Es sei P0 und G0 ein System von Punkten mit P ⊂ P0 und G ⊂ G0 zusammen
mit Inzidenz-, Anordnungs- und Kongruenzrelationen, die die die Inzidenz-, Anordnungs- und
Kongruenzrelationen auf P und G fortsetzen. Dann gilt P = P0 und G = G0 . Man sagt auch,
dass das ursprüngliche System maximal ist.
Man kann zeigen, dass es bis auf Isomorphie genau ein System von Punkten, Geraden zusammen mit den zugehörigen Relationen gibt, welches alle aufgeführten Hilbertschen Axiome
erfüllt. Man kann damit die gesamte Geometrie nun anhand der Axiome aufbauen. Da dies aber
sehr mühsam ist, gehen wir einen einfacheren Weg und definieren ein Modell der euklidischen
Geometrie, welches die Axiome erfüllt und arbeiten dann damit.
In der so genannten absoluten Geometrie arbeitet man lediglich mit den Axiomen der Verknüpfung 2.2.1, den Axiomen der Anordnung 2.2.6, 2.2.7 und den Axiomen der Vollständigkeit. Die Axiome der Kongruenz werden durch etwas schwächere Axiome (der Bewegung) ersetzt
(vgl. [30]). Dadurch wird erreicht, dass es absolute Geometrien gibt, in denen keine Parallelen
existieren (im Gegensatz zu Satz 2.2.25). Auf das Parallelenaxiom wird in der absoluten Geometrie vollständig verzichtet. Ersetzt man dieses durch die Forderung, dass es keine Parallelen
gibt, so erhält man die elliptischen Geometrien; fordert man die Existenz mindestens zweier
Parallelen, so erhält man eine hyperbolische Geometrie.
Kapitel 3
Klassische euklidische Geometrie
Die klassischen Ergebnisse der Euklidischen Geometrie sind das zentrale Thema des Geometrieunterrichts in der Unter- und Mittelstufe des allgemeinbildenden Gymnasiums. Naturgemäß
sind Schüler dieser Altersstufe nicht in der Lage, einen deduktiven Theorieaufbau verstehen zu
können. Vielmehr muss man an Alltagserfahrungen sowie -anschauungen anknüpfen und ausgehend von (mehr oder weniger) evidenten Sachverhalten die Geometrie entwickeln. Wir wollen
hier einerseits keine Larifari“-Mathematik betreiben, andererseits aber auch nicht zu viel Zeit
”
auf eine theoretische Fundierung verschwenden. Daher stellen wir ein auf Grundlage analytischer Vorkenntnisse gewonnenes Modell der euklidischen Geometrie vor, auf dessen Basis wir
dann die Elementargeometrie entlang den in der Schule üblichen und möglichen Wegen entwickeln werden.
3.1
Ein Modell der euklidischen Geometrie
In diesem Abschnitt definieren wir Punkte und Geraden und zeigen die grundlegenden Aussagen, die man in der Schule als anschaulich gegeben voraussetzt.
3.1.1 Definition Unter der Euklidischen Ebene E := (R2 , h·, ·i) verstehen wir den reellen
Vektorraum R2 ausgestattet mit dem Standardskalarprodukt (als Messinstrument). Die Punkte
dieser Geometrie sind die Elemente von R2 . Wir schreiben für einen Punkt A von E oft einfach
A ∈ E. Weiter ist für A ∈ E und v ∈ R2 \ {0} die Menge
Γ := A + Rv := {a + t · v; t ∈ R}
eine Gerade in E. Ein Punkt P gehört zu Γ, falls P ∈ Γ gilt.
Im folgenden Teil dieses Abschnitts überprüfen wir, dass unser Modell das Axiomensystem von
Hilbert erfüllt. Bei einigen Axiomen ist dies mehr oder weniger offensichtlich; wir werden daher
den Nachweis lediglich an einigen ausgewählten Axiomen explizit durchführen. Um einen ersten
Eindruck zu gewinnen, zeigen wir exemplarisch das erste Inzidenzaxiom:
3.1 Ein Modell der euklidischen Geometrie
21
3.1.2 Lemma Es seien A, B ∈ E mit A 6= B. Dann gibt es genau eine Gerade AB, zu der A
und B gehören.
Beweis
Existenz: Mit v := B − A gilt für Γ := A + Rv offenbar A, B ∈ Γ.
Eindeutigkeit: Es sei K := C + Ru eine weitere Gerade mit A, B ∈ K. Dann gibt es s, t ∈ R
mit C + su = A und C + tu = B, d.h. (t − s)u = B − A. Es sei nun X ∈ Γ. Dann gilt
X = A + r(B − A) für ein r. Daraus folgt
X = C + su + r(t − s)u = C + (s + rt − rs)u ∈ K,
also Γ ⊂ K. Analog zeigt man K ⊂ Γ, also die Eindeutigkeit.
Als Übung empfehlen wir, auch die anderen Inzidenzaxiome nachzuweisen.
Wir können auch eine Zwischenbeziehung definieren:
3.1.3 Definition Es seien A 6= B ∈ E und Γ := A + R(B − A) sei die eindeutig bestimmte
Gerade durch A und B. Ist nun C ∈ Γ, dann gibt es genau ein t ∈ R mit C = A + t(B − A).
Dann liegt C zwischen A und B, falls 0 < t < 1 gilt und die Strecke AB ist definiert durch
AB := {A + t(B − A), t ∈]0, 1[}
Die Anordnungsaxiome aus 2.2.6 sind mit dieser Definition relativ einfach nachzuweisen. Mehr
Probleme bereitet das Axiom von Pasch 2.2.7, für dessen Nachweis wir eine einfache Charakterisierung dafür einführen, dass zwei Punkte auf verschiedenen Seiten einer Geraden liegen.
3.1.4 Definition Es sei Γ := A+Rv eine Gerade. Ein Vektor n ∈ R2 \{0} heißt Normalenvektor
von Γ, falls hv, ni = 0 gilt. Dabei bezeichnet h , i wie erwähnt das Standardskalarprodukt im
R2 .
3.1.5 Aufgabe Es sei Γ := A + Rv eine Gerade und n ein Normalenvektor von Γ. Man zeige
Γ = {P ∈ R2 ; hP − A, ni = 0}.
3.1.6 Lemma Es sei Γ eine Gerade mit A ∈ Γ und Normalenvektor n. Dann liegen P, Q ∈ E\Γ
genau dann auf der gleichen Seite von Γ, wenn hP −A, ni und hQ−A, ni0 das gleiche Vorzeichen
haben.
Beweis Es gilt P Q = {P + t(Q − P ); t ∈]0, 1[} = {tQ + (1 − t)P ; t ∈]0, 1[}. Für X ∈ P Q
hat man also
hX − A, ni = thQ − A, ni + (1 − t)hP − A, ni =: µt + ν(1 − t) =: f (t).
Offenbar ist f eine lineare Funktion, und es gilt f (0) = ν und f (1) = µ. Daher hat f genau dann
eine Nullstelle in ]0, 1[, wenn ν und µ verschiedenes Vorzeichen haben, woraus die Behauptung
folgt.
Damit können wir nun das Axiom von Pasch 2.2.7 beweisen:
22
Klassische euklidische Geometrie
3.1.7 Satz Es seien A, B, C ∈ E drei Punkte, die nicht auf einer gemeinsamen Gerade liegen.
Weiter sei Γ eine Gerade, die keinen der drei Punkte A, B, C enthalte sowie die Strecke AB
schneide. Dann schneidet Γ auch BC oder AC.
Beweis Es sei S der Schnittpunkt von Γ mit AB sowie n ein Normalenvektor von Γ. Gemäß
3.1.6 können wir (sonst ersetze man n duch −n) annehmen, dass hA−S, ni < 0 und hB −S, ni >
0 gilt. Weiter gilt nach Voraussetzung hC − S, ni =
6 0.
Im ersten Fall sei hC − S, ni > 0. Wieder aufgrund von 3.1.6 liegen dann C und A auf verschiedenen Seiten von Γ, d.h. Γ schneidet AC. Der andere Fall geht analog.
Der Begriff des Halbstrahls übersetzt sich folgendermaßen:
3.1.8 Definition Es seien A, B ∈ E mit A 6= B. Dann heißt AB
−→ := {A + t(B − A), t ≥ 0}
der Halbstrahl von A in Richtung B.
3.1.9 Aufgabe Man zeige: Sind A, B, C ∈ E mit B, C 6= A, so sind folgende Aussagen äquivalent:
1. AB
−→ = AC
−→,
2. es gibt ein s ∈ R>0 mit C − A = s(B − A),
3. B und C liegen auf der gleichen Seite von A.
Um die metrischen Größen in E, nämlich Streckenlänge und Winkel, einführen zu können,
benötigen wir das Skalarprodukt als Messinstrument. Dazu bezeichnen wir wie üblich mit h·, ·i
das Standardskalarprodukt im Rn und mit arccos den Hauptwert des Arkuskosinus.
3.1.10 Definition
1. Es seien A, B ∈ E. Die Länge der Strecke AB ist definiert durch
p
|AB| := hB − A, B − Ai.
2. Zwei Strecken AB und CD sind kongruent, falls |AB| = |CD| gilt.
Es ist eine einfache Übung nachzurechnen, dass mit dieser Definition die Kongruenzaxiome für
Strecken 2.2.12 erfüllt sind.
Ebenso lassen sich Winkel mit Hilfe des Skalarprodukts definieren:
3.1.11 Definition
1. Sind AB
−→ sowie AC
−→ zwei Halbstrahlen, so ist der Winkelwert zwischen
diesen Halbstrahlen AB
−→ und AC
−→ definiert durch
^BAC := ^(AB
AC
−→, −
→) := arccos
hB − A, C − Ai
|AB| · |AC|
.
3.1 Ein Modell der euklidischen Geometrie
23
0 0
0 0
2. Zwei Winkel ∠(AB
AC
A−
C
−→, −
→) und ∠(A
−−B
→, −
→) sind kongruent, wenn
0 0
0 0
A−
C
^(AB
AC
→)
−−B
→, −
−→, −
→) = ^(A
gilt.
3.1.12 Aufgabe Man zeige, dass die Definition des Winkelwerts wohldefiniert ist, also nicht
von der Wahl der Punkte B und C auf den Halbstrahlen abhängt.
Mit Hilfe von etwas Analysis können wir zeigen, dass die Definition des Winkelwerts mit unserer
intuitiven Vorstellung übereinstimmt:
3.1.13 Lemma (Zirkellemma) Es sei γ : R → E, t 7→ (cos(t), sin(t)), die übliche Parametrisierung des Einheitskreises, sowie t1 , t2 ∈ R mit 0 ≤ t2 − t1 ≤ π. Weiter seien V := γ(t1 ),
W := γ(t2 ) und O := (0; 0) der Mittelpunkt des Kreises. Dann gilt
Zt2
kγ 0 (t)k dt = ^V OW
t1
Beweis
Offenbar gilt
Zt2
t1
Zt2 q
kγ (t)k dt =
sin2 (t) + cos2 (t) dt = t2 − t1 .
0
t1
Wegen |OV | = |OW | = 1 liefert das Additionstheorem des Kosinus nun die Behauptung, wenn
man zudem beachtet, dass 0 ≤ t2 − t1 ≤ π gilt.
Anschaulich zeigt dieses Lemma, dass der Winkelwert des durch den Kreismittelpunkt und die
Punkte V und W bestimmten Winkel genau der Länge des zugehörigen Kreisbogens auf dem
Einheitskreis entspricht. Desweiteren folgt daraus offenbar die Additivität nebeneinanderliegender Winkel. Mit Hilfe dieser Charakterisierung ist es nun nicht schwierig, die Axiome 2.2.17
nachzuweisen.
3.1.14 Aufgabe Es sei X ∈ E ein Punkt mit kXk = 1. Man zeige, dass es dann genau ein
t ∈ [0; 2π[ gibt mit (cos(t), sin(t)) = X.
3.1.15 Aufgabe Man zeige, dass sich im kartesischen Modell Winkel im Sinn von Axiom 2.2.17
eindeutig abtragen lassen.
24
Klassische euklidische Geometrie
Interessanter wird es mit der Kongruenzsatz sws“ 2.2.19, für den wir nun in unserem Modell
”
einen Beweis geben:
3.1.16 Satz Es seien ∆ABC sowie ∆A0 B 0 C 0 Dreiecke mit |AB| = |A0 B 0 |, |AC| = |A0 C 0 | und
^BAC = ^B 0 A0 C 0 . Dann gilt auch ^CBA = ^C 0 B 0 A0 .
Beweis
Zunächst sieht man
hC−A, A−Bi = − cos(^BAC)·|AC|·|AB| = − cos(^B 0 A0 C 0 )·|A0 C 0 |·|A0 B 0 | = hC 0 −A0 , A0 −B 0 i.
Daher hat man auch
|BC| = |C − A + A − B| =
p
|AC|2 + 2hC − A, A − Bi + |AB|2 = |B 0 C 0 |.
Somit folgt nun
cos ^CBA =
hC − B, A − Bi
hC − A, A − Bi |AB|
=
+
= cos ^C 0 B 0 A0
|BC| · |AB|
|BC| · |AB|
|BC|
und daraus die Behauptung.
Die Axiomengruppe Parallelität besteht lediglich aus einem einzigen Axiom, nämlich dem Parallelenaxiom, dessen Nachweis im kartesischen Modell nicht allzuschwierig ist. Wir erweitern die
Definition einer Parallelen geringfügig, um Parallelität zu einer Äquivalenzrelation zu machen:
3.1.17 Definition Zwei Geraden g und h sind parallel, falls sie keinen Schnittpunkt haben
oder g = h gilt.
3.1.18 Aufgabe
1. Es seien Γ = A + Rv und K = B + Ru zwei Geraden. Man zeige, dass
Γ und K genau dann parallel sind, wenn v = tu für ein geeignetes t ∈ R gilt.
2. Man zeige das Parallelenaxiom 2.2.26: Ist Γ eine Gerade und P ∈ E ein Punkt, so gibt es
maximal eine zu Γ parallele Gerade durch P .
Eine weitere Anwendung der in Aufgabe 3.1.18 gegebenen Charakterisierung von Parallelität
ist der Strahlensatz:
3.1.19 Satz (Strahlensatz) Es seien g, h zwei unterschiedliche Halbstrahlen, die von einem
gemeinsamen Punkt S ausgehen, aber nicht auf der gleichen Gerade liegen und von zwei verschiedenenen parallelen Geraden (nicht durch S) in A und B bzw. C und D geschnitten werden
(d.h. AB k CD). Dann gilt
|DC|
|SC|
|SD|
=
=
.
|AB|
|SA|
|SB|
Beweis Nach Voraussetzung und Aufgabe 3.1.9 gelten (C −S) = α(A−S), D−S = β(B −S)
und wegen der Parallelität D − C = γ(B − A). Andererseits gilt
γ(B − S + S − A) = γ(B − A) = D − C = D − S + S − C = β(B − S) − α(A − S).
3.1 Ein Modell der euklidischen Geometrie
25
Abbildung 3.1: Der Strahlensatz
Daraus erhält man (β − γ)(B − S) + (γ − α)(A − S) = 0. Da g und h verschiedene Strahlen
sind, sind B − S und A − S linear unabhängige Vektoren, also folgen α = γ = β und damit die
Behauptung.
3.1.20 Aufgabe Man zeige die Umkehrung des Strahlensatzes: Werden zwei Strahlen, die von
einem gemeinsamen Punkt S ausgehen, von zwei parallelen Geraden in A und B bzw. C und
D (mit A 6= B und C 6= D) geschnitten, sodass
|SD|
|SC|
=
|SA|
|SB|
gilt, dann sind AB und CD parallel.
Das Axiom von Archimedes 2.2.27 nachzuweisen, ist ebenfalls nicht weiter schwierig und bleibt
dem Leser zur Übung überlassen. Etwas aufwändiger ist der Nachweis des Vollständigkeitsaxiom
2.2.28.
3.1.21 Satz Es seien P0 Punkte und G0 Geraden eines Systems, welches die Axiome einer
ebenen euklidischen Geometrie erfüllt mit P := R2 ⊂ P0 und G := {AB; A, B ∈ E} ⊂ G0 .
Dann gilt P = P0 und G = G0 .
Beweis Wir zeigen dies in drei Schritten: Zunächst sei P ∈ P0 ein Punkt, der zu der Geraden
AB ∈ G gehört. Dann legen wir gemäß dem Archimedischen Axiom die Strecke AB so oft an A
in Richtung P an bis die Strecke nAB den Punkt P enthält. Den Endpunkt der Strecke nAB
bezeichnen wir mit C. Offenbar gilt C ∈ P. Daher läßt sich AB in der Form A + R(C − A)
schreiben, und es gilt C = A + 1(C − A). Es sei nun
T := {t ∈ R; A + t(C − A) liegt auf der gleichen Seite von P wie A}.
Dann gilt T 6= ∅, da 0 ∈ T . Weiter gilt offenbar T < 1, also ist T beschränkt. Es sei nun
s = sup T und Q := A + s(C − A).
Liegt nun Q auf der gleichen Seite wie A von P , so gibt es wie oben ein k, sodass das k-fache
und
Abtragen der Strecke QP von Q aus den Punkt C enthält. Wir setzen nun s0 := s + 1−s
k
26
Klassische euklidische Geometrie
Q0 := A + s0 (C − A). Trägt man nun die Strecke QQ0 genau k-mal von Q aus ab, so erhält man
die Strecke QC. Insbesondere gilt s0 > s. Weil die Strecke QC aber in der k-mal abgetragen
Strecke QP enthalten ist, ist auch die Strecke QQ0 in QP enthalten. Daher liegt Q0 auf der
gleichen Seite von P wie Q, was der Wahl von s als Supremum von T widerspricht.
Analog zeigt man, dass Q auch nicht auf der anderen Seite von P liegen kann, was schließlich
impliziert, dass P = Q ∈ P gilt.
Es sein nun P ∈ P0 ein beliebiger Punkt. Dann wählen wir einen Punkt S ∈ P und betrachten
die Gerade SP . Weiter wählen wir drei Punkte A, B, C ∈ P, sodass A, S, B auf einer Geraden
liegen, S zwischen A und B liegt und C ∈
/ AB liegt. Nach dem Axiom von Pasch 2.2.7 schneidet
dann SP entweder AC oder AB in X. Nach dem ersten Teil des Beweises ist X ∈ P und die
Gerade SP stimmt mit SX überein. Wieder nach dem ersten Teil gilt dann auch P ∈ P.
Der Abschluss des Beweises ist nun einfach: Es sei Γ ∈ G0 eine Gerade. Diese enthält zwei
Punkte P, Q ∈ P0 = P. Daher gilt Γ = P Q ∈ G.
3.2
Grundlegende Aussagen der Mittelstufengeometrie
In diesem Abschnitt wiederholen wir die grundlegenden Aussagen der klassischen euklidischen
Geometrie, wie sie so auch üblicherweise in der Schulmathematik besprochen werden. Wir
werden daher auch nicht von höherer Warte“ aus diese Grundaussagen betrachten, sondern
”
vielmehr dem klassischen Schulweg folgen. Die Aussagen jedoch, die in der Schule üblicherweise
aus der unmittelbaren Anschauung gewonnen werden, weisen wir mit unserern Methoden nach
und legen diese dann für die weitere Entwicklung zugrunde.
Exemplarisch zeigen wir, wie man den in Abschnitt 2.2.3 aus den Axiomen abgeleiteten Nebenwinkelsatz 2.2.22 alternativ mit analytischen Methoden in unserem Modell erhalten kann.
3.2.1 Satz (Nebenwinkelsatz) Es seien A, B, D ∈ E drei Punkte auf einer Geraden Γ mit A
zwischen B und D. Weiter sei C ∈ E ein Punkt nicht auf Γ. Dann gilt
^CAD = π − ^BAC.
Beweis Da A zwischen B und D liegt, gilt A = B + t(D − B) für ein t ∈]0, 1[. Dies impliziert
t(D − A) = (t − 1)(B − A), also D − A = s(B − A) für ein s < 0. Daher gilt
shB − A, C − Ai
hB − A, C − Ai
hD − A, C − Ai
=
=−
.
|AD| · |AC|
|s||AB| · |AC|
|AB| · |AC|
Für x ∈ [0, π] gilt − cos(x) = cos(π − x), woraus die Behauptung folgt.
Wir verwenden bereits im nächsten Satz das Parallelenaxiom. Im Kapitel 4 werden wir uns mit
Geometrien auseinandersetzen, in denen das Parallelenaxiom nicht erfüllt ist.
3.2.2 Satz (Stufenwinkelsatz bzw. Wechselwinkelsatz) Es seien g, g 0 ein Paar verschiedener
paralleler Geraden sowie h eine Gerade, die g und g 0 in S und S 0 schneide. Es seien A und A0
3.2 Grundlegende Aussagen der Mittelstufengeometrie
27
Punkte auf g und g 0 , die auf den entsprechenden Seiten von S bzw. S 0 liegen. Weiter sei B ein
Punkt auf h, sodass S und S 0 auf der gleichen Seite von B liegen. Dann gilt
^ASB = ^A0 SB.
Den Beweis dieses Satzes überlassen wir dem Leser zur Übung (dieser folgt im Übrigen auch
aus dem Beweis des Satzes 2.2.25 zusammen mit dem Parallelenaxiom 2.2.26). Eine erste etwas
interessantere Folgerung ist der Satz über die Winkelsumme im Dreieck.
3.2.3 Satz (Winkelsummensatz) Es sei ∆ABC ein Dreieck. Dann gilt
^BAC + ^CBA + ^ACB = π.
Beweis
Es sei g eine (die) Paralle zu AB durch C sowie A0 und B 0 Punkte auf AB mit C
Abbildung 3.2: Zum Beweis des Winkelsummensatzes 3.2.3
zwischen A0 und C 0 . Dann gilt aufgrund des Stufenwinkelsatzes 3.2.2
^BAC + ^CBA + ^ACB = ^B 0 CA0 = π.
Eine unmittelbare Folgerung des Winkelsummensatz ist der Satz vom Außenwinkel:
3.2.4 Definition In einem Dreieck heißen die Nebenwinkel der Innenwinkel die Außenwinkel
des Dreiecks.
3.2.5 Korollar (Satz vom Außenwinkel) In einem Dreieck entspricht der Wert eines jeden Außenwinkels der Summe der Winkelwerte der beiden nicht anliegenden Innenwinkel; insbesondere
ist jeder Außenwinkel größer als die beiden nicht anliegenden Innenwinkel.
Einer der grundlegendensten Sätze der klassischen Schulgeometrie ist der Basiswinkelsatz:
3.2.6 Satz Es sei ABC ein gleichschenkliges Dreieck mit |AC| = |BC|. Dann gilt
^BAC = ^CBA.
28
Klassische euklidische Geometrie
Beweis Dies ist eine direkte Anwendung des Axioms 2.2.19 bzw. des Kongruenzsatzes sws
3.1.16 auf die Dreiecke ABC und BAC.
3.2.7 Korollar In jedem Dreieck liegt der größere Winkel der größeren Seite gegenüber: In
einem Dreieck ABC gilt genau dann die Ungleichung ^BAC < ^CBA, wenn |BC| < |AC|
gilt.
Beweis Für ⇐ “ zeigen wir die Negierung der Aussage, d.h. wir gehen von der Ungleichung
”
|BC| ≥ |AC| aus. Dann gibt es einen Punkt A0 auf CB mit |A0 C| = |AC|. Dann gilt nach dem
Außenwinkelsatz 3.2.5 ^CA0 A ≥ ^CBA. Mit dem Basiswinkelsatz folgt schließlich
^BAC ≥ ^A0 AC = ^CA0 A ≥ ^CBA.
Die umgekehrte Richtung geht analog.
Eine unmittelbare Folgerung ist die Umkehrung des Basiswinkelsatzes
3.2.8 Korollar Es sei ABC ein Dreieck mit gleichen Basiswinkeln, etwa ^BAC = ^CBA.
Dann gilt |AC| = |CB|.
In vielen Anwendungen spielt der so genannte rechte Winkel eine fundamentale Rolle:
3.2.9 Definition Ein Winkel mit dem Winkelwert
π
heißt rechter (oder orthogonaler) Winkel.
2
3.2.10 Satz Es sei g eine Gerade mit drei Punkten A, O, B, sodass O zwischen A und B liegt,
sowie C ein Punkt nicht auf g. Dann sind äquivalent:
1. ∠AOC ist ein rechter Winkel;
2. ∠BOC ist ein rechter Winkel;
3. hOA, OCi = 0;
4. hOB, OCi = 0.
Beweis Die Äquivalenz von 1. und 2. ist eine direkte Folgerung aus dem analytischen Nebenwinkelsatz 3.2.1; die Äquivalenzen von 1. und 3. bzw. 2. und 4. folgen sofort aus der Definition
3.1.11 des Winkelwerts.
Im Folgenden beweisen wir noch die Kongruenzsätze.
3.2.11 Definition Zwei Dreiecke heißen kongruent, falls es eine Eckenbenennung ABC bzw.
A0 B 0 C 0 gibt mit
|AB| = |A0 B 0 |, |AC| = |A0 C 0 |, |BC| = |B 0 C 0 |
sowie
^BAC = ^B 0 A0 C, ^CBA = ^C 0 B 0 A0 und ^ACB = ^A0 C 0 B 0
gelten.
3.3 Abbildungen
29
3.2.12 Satz (wsw) Es seien ABC und A0 B 0 C 0 Dreiecke mit |AB| = |A0 B 0 |, ^CBA = ^C 0 B 0 A0
und ^BAC = ^B 0 A0 C 0 . Dann sind ABC und A0 B 0 C 0 kongruent.
Beweis Ohne Einschränkung können wir annehmen, dass |BC| ≤ |B 0 C 0 | ist. Trägt man nun
die Strecke |BC| von B 0 ausgehend auf B 0 C 0 ab, so sei C 00 der Endpunkt dieser Strecke: Dann
sind die Dreiecke ABC und A0 B 0 C 00 nach dem Kongruenzsatz 3.1.16 kongruent. Daher gilt
^B 0 A0 C 00 = ^BAC = ^B 0 A0 C 0 .
Dies impliziert aber C 00 = C 0 und damit die Behauptung.
3.2.13 Satz (sss) Es seien ABC und A0 B 0 C 0 Dreiecke mit |AB| = |A0 B 0 |, |AC| = |A0 C 0 | und
|BC| = |B 0 C 0 |. Dann sind ABC und A0 B 0 C 0 kongruent.
Beweis
Für v, w ∈ E gilt die Identität
1
|v|2 + |w|2 − |v − w|2 .
(3.1)
2
Dies impliziert, dass die Winkelwerte ^BAC und ^B 0 A0 C 0 übereinstimmen. Dann folgt die
Behauptung wieder aus 3.1.16.
hv, wi =
3.2.14 Satz (ssW, oft auch Ssw) Es seien ABC und A0 B 0 C 0 Dreiecke mit
|AB| = |A0 B 0 | ≥ |AC| = |A0 C 0 | und ^ACB = ^A0 C 0 B 0 .
Dann sind ABC und A0 B 0 C 0 kongruent.
Beweis Es genügt zu zeigen, dass |CB| = |C 0 B 0 | ist. Andernfalls können wir |CB| > |C 0 B 0 |
annehmen. Dann gibt es einen Punkt B 00 auf der Strecke C 0 B 0 , sodass |C 0 B 00 | = |CB| gilt.
Somit sind die Dreiecke ABC und A0 B 00 C 0 kongruent. Insbesondere gilt ^CBA = ^C 0 B 00 A0
und |B 00 A| = |AB| = |A0 B 0 |. Nachdem Basiswinkelsatz gilt daher ^A0 B 0 B 00 = ^A0 B 00 B 0 . Daher
ist ∠C 0 B 00 A0 zum Außenwinkel von ∠A0 B 0 C 0 = ∠A0 B 0 B 00 kongruent. Daher hat man
^CBA = ^C 0 B 00 A0 > ^A0 C 0 B 00 = ^ACB.
. Nach Korollar 3.2.7 folgt daraus aber |AC| > |AB| im Widerspruch zur Annahme.
3.2.15 Aufgabe Man zeige, dass im Satz 3.2.14 (mit der dort verwendeten Notation) die
Voraussetzung |AB| ≥ |AC| notwendig ist.
3.3
Abbildungen
Wie in den meisten mathematischen Disziplinen spielen Abbildungen auch in der Geometrie eine entscheidende Rolle. Beispielsweise wird in der Schule die Kongruenz von Dreiecken oftmals
über Kongruenzabbildungen eingeführt. Dabei versteht man unter einer Kongruenzabbildung
eine aus Translationen (Verschiebungen), Rotationen (Drehungen) und Spiegelungen zusammengesetze Abbildung. Wir werden in diesem Abschnitt diese und allgemeinere Abbildungen
untersuchen.
30
Klassische euklidische Geometrie
3.3.1 Definition Eine bijektive Abbildung f : E → E heißt eine Ähnlichkeitstransformation,
wenn f geraden- und verhältnistreu ist, d.h. für alle A, B, C, D ∈ E und jede Gerade g ∈ G gilt
(i) f (g) ∈ G (Geradentreue),
(ii) |f (A)f (B)| · |CD| = |f (C)f (D)| · |AB| (Verhältnistreue).
Offenbar ist eine Abbildung genau dann verhältnistreu, wenn es eine positive Zahl λ ∈ R gibt
mit |f (A)f (B)| = λ|AB| für alle A, B ∈ E. Man nennt dieses λ auch den Streckfaktor von f .
3.3.2 Aufgabe
1. Man zeige, dass die Menge aller Ähnlichkeitstransformationen zusammen
mit der üblichen Verkettung von Abbildungen eine Gruppe ist.
2. Es seien Z ∈ E und λ ∈ R \ {0}. Eine Abbildung f : E → E der Form X 7→ λ(X − Z) + Z
heißt zentrische Streckung mit Zentrum Z und Streckfaktor λ. Man zeige, dass zentrische
Streckungen Ähnlichkeitsabbildungen sind. Gibt es weitere Ähnlichkeitsabbildungen?
3.3.3 Bemerkung Im folgenden verwenden wir eine einfache Charakterisierung der Zwischenbeziehung mit Hilfe des Begriffs der Streckenlänge: Liegen drei Punkte A, B, C auf einer Geraden, so liegt B genau dann zwischen A und C, wenn |AB| < |AC| und |BC| < |AC| gelten.
3.3.4 Lemma Es sei f : E → E eine Ähnlichkeitstransformation und A.B, C ∈ E drei Punkte
auf einer Geraden mit B zwischen A und C. Dann liegt auch f (B) zwischen f (A) und f (C).
Beweis
Angenommen f (B) liegt nicht zwischen f (A) und f (C). Dann kann man ohne
Einschränkung annehmen, dass f (A) zwischen f (B) und f (C) liegt. Mit Hilfe von 3.3.3 erhält
man
|BC|
|f (B)f (C)|
=
< 1,
1<
|f (A)f (C)|
|AC|
was einen Widerspruch darstellt.
3.3.5 Satz Jede Ähnlichkeitsabbildung f : E → E mit f (0) = 0 ist eine lineare Abbildung des
R2 = E.
Beweis Es seien U ∈ R2 sowie α ∈ R. Dann liegen die Punkte 0, U und αU auf einer Geraden.
Wir betrachten nur den Fall α > 1 (die anderen Fälle gehen analog), d.h. U liegt zwischen 0
und αU . Da |0(αU )| = α|0U | gilt, liefert die Verhältnistreue sofort |0f (αU )| = α|0f (U )|. Weil
f geradentreu ist, liegen 0, f (U ) und f (αU ) auch auf einer Geraden und aufgrund des letzten
Lemmas liegt f (U ) zwischen 0 und f (αU ). Insgesamt folgt f (αU ) = αf (U ).
Es sei nun auch W ∈ R2 . Dann liegen U , W und V := 21 (U + W ) auf einer Geraden, und es
gilt |U V | = |W V |. Die Verhältnistreue und die Geradentreue liefert einerseits |f (U )f (V )| =
|f (W )f (V )| und andererseits, dass f (U ), f (W ) und f (V ) auf einer Geraden mit f (V ) zwischen
f (U ) und f (W ) liegen. Dies impliziert
1
1
1
(f (U ) + f (W )) = f (V ) = f
(U + W ) = f (U + W ),
2
2
2
3.3 Abbildungen
31
wobei die letzte Umformung aus dem ersten Teil des Beweises folgt. Dies impliziert unmittelbar
f (U + W ) = f (U ) + f (W ).
3.3.6 Korollar Jede Ähnlichkeitsabbildung f : E → E läßt sich in der Form f (x) = Ax + b
mit b ∈ E und einer quadratischen Matrix A ∈ R2×2 darstellen.
Beweis
Die Abbildung g : E → E, x 7→ f (x) − f (0), erfüllt die Voraussetzung von 3.3.5,
d.h. g(x) = Ax für eine geeignete Matrix A ∈ R2×2 . Setzt man b := f (0), so erhält man
f (x) = Ax + b.
3.3.7 Aufgabe Man zeige, dass Ähnlichkeitsabbildungen winkeltreu sind, d.h. sind f : E → E
eine Ähnlichkeitsabbildung und A, B, C ∈ E, so gilt
^f (B)f (A)f (C) = ^BAC.
Ähnlichkeitsabbildungen sind, wie erwähnt, dadurch charakterisiert, dass |f (A)f (B)| = λ|AB|
mit einem geeigneten λ > 0 gilt. Ein Spezialfall liegt vor, falls gerade λ = 1 ist.
3.3.8 Definition Eine Ähnlichkeitsabbildung f : E → E heißt eine Kongruenzabbildung, falls
f längentreu ist, d.h.
|f (A)f (B)| = |AB|
gilt.
3.3.9 Bemerkung Ist f : E → E eine Ähnlichkeitsabbildung mit Streckfaktor λ, so ist λ1 f eine
Kongruenzabbildung.
3.3.10 Lemma Ist f : E → E eine Kongruenzabbildung mit f (0) = 0, so ist die zu f gemäß
3.3.5 gehörende Matrix A orthogonal, d.h. A ∈ O2 (R) (es gilt A−1 = A> ).
Beweis
Dies ist eine direkte Folgerung aus Satz 3.3.5 und der Gleichung (3.1).
3.3.11 Korollar
1. Jede Kongruenzabbildung f ist von der Form f (x) = Ax + b mit einer
orthogonalen Matrix A ∈ O2 (R).
2. Jede Ähnlichkeitsabbildung f ist von der Form f (x) = λAx + b mit einer orthogonalen
Matrix A ∈ O2 (R) und einem λ ∈ R.
Jede Kongruenzabbildung ist aus Drehungen, Spiegelungen und Translationen zusammengesetzt.
3.3.12 Satz Jede Kongruenzabbildung mit f (0) = 0 ist entweder eine Spiegelung an einer
Ursprungsgerade oder eine Drehung um den Ursprung.
32
Beweis
Klassische euklidische Geometrie
Nach Lemma 3.3.5
a
orthogonalen Matrix A =
c
gilt bekanntlich
a
b
ist f von der Form f (x) = Ax mit einer nach Lemma 3.3.10
b
∈ O2 (R). Insbesondere bedeutet das det(A) = ±1. Weiter
d
c
d −b
>
−1
= A = A = ±1
.
d
−c a
Im Fall von det(A) = 1 impliziert das
a −b
A=
b a
mit det(A) = a2 + b2 = 1.
Daher gibt es dann α ∈ [0; 2π[ mit a = cos(α) und b = sin(α) und A ist die Drehmatrix zum
Winkel α
cos(α) − sin(α)
A = D(α) =
.
sin(α) cos(α)
Im Fall det(A) = −1 erhält man
a b
A=
b −a
mit − det(A) = a2 + b2 = 1.
Man rechnet dann schnell nach, dass A genau die zwei Eigenwerte 1 und −1 besitzt und
v := (b, 1 − a) und w := (a − 1, b) zugehörige orthogonale Eigenvektoren sind. Also ist A
Spiegelungsmatrix zur Spiegelung an Γ := Rv.
3.3.13 Aufgabe Man zeige, dass sich jede Drehung um den Ursprung als Komposition von
Spiegelungen an Ursprungsgeraden schreiben lässt.
3.3.14 Satz Zwei (nicht entartete) Dreiecke ABC und A0 B 0 C 0 sind genau dann kongruent
(in dieser Bezeichnung), wenn es eine Kongruenzabbildung f : E → E gibt mit f (A) = A0 ,
f (B) = B 0 und f (C) = C 0 .
Beweis
⇐“ Dies ist eine unmittelbare Folgerung aus der Definition einer Kongruenzabbil”
dung und z.B. dem Kongruenzsatz 3.2.13 oder der Aufgabe 3.3.7.
⇒“ Weil das Dreieck ABC nicht entartet ist, sind die Vektoren v := B − A und w := C − A
”
linear unabhängig, also eine Basis des R2 . Es sei nun die lineare Abbildung h : R2 → R2 definiert
durch h(v) := v 0 := B 0 − A0 und h(w) := w0 := C 0 − A0 .
Es sei nun u ∈ R2 ein beliebiger Vektor. Dieser besitzt eine Darstellung u = αv + βw.
kuk2 = hu, ui = α2 ||v||2 + β 2 ||w||2 + 2αβhv, wi.
Auf der anderen Seite gilt h(u) = αv 0 + βw0 und damit
kh(u)k = hh(u), h(u)i2 = α2 ||v 0 ||2 + β 2 ||w0 ||2 + 2αβhv 0 , w0 i.
Die Kongruenz der Dreiecke ABC und A0 B 0 C 0 impliziert aber ||v|| = ||v 0 ||, ||w|| = kw0 k sowie
hv, wi = hv 0 , w0 i. Ein Vergleich der beiden obigen Gleichungen für die Skalarprodukte zeigt nun
||u|| = ||h(u)||; somit ist h längentreu. Setzt man nun
f : E → E, x 7→ h(x − A) + A0 ,
3.4 Sätze über Polygone am Kreis
33
so ist f eine Kongruenzabbildung und erfüllt f (A) = A0 , f (B) = B 0 sowie f (C) = C 0 .
3.3.15 Aufgabe Man nennt zwei Dreiecke ähnlich, wenn es eine Ähnlichkeitstransformation
gibt, die die beiden Dreiecke ineinander überführt. Man zeige, dass zwei Dreiecke genau dann
ähnlich sind, wenn sie in entsprechenden Winkeln übereinstimmen. Trifft dies auch auf Vierecke
zu?
3.4
Sätze über Polygone am Kreis
In diesem Abschnitt besprechen wir einige Sätze, die (derzeit leider) nicht mehr verbindlich im
Lehrplan der Mittelstufe verankert sind. Wir beginnen mit dem Satz des Thales:
3.4.1 Definition Es sei M ∈ E ein Punkt und r > 0. Dann ist
K(M ; r) := {X ∈ E; |XM | = r}
der Kreis um M mit Radius r.
3.4.2 Bemerkung Bekanntlich ist K(M ; r) das Bild der Abbildung
γ : R → E; t 7→ M + r(cos(t); sin(t)).
Wir führen noch folgende Redensart ein: Für t, t0 ∈ R mit t0 −t ≤ π sagen wir, dass X ∈ K(M ; r)
zwischen γ(t) und γ(t0 ) liegt, falls es ein s ∈ R mit t < s < t0 gibt, so dass X = γ(s) gilt. (Man
beachte, dass dadurch im Fall t0 − t = π beide Halbkreise zwischen γ(t) und γ(t0 ) liegen, was
anschaulich vielleicht etwas verwirrend sein mag, aber für die weiteren Überlegungen oftmals
ganz praktisch, beispielsweise im folgenden Satz!)
3.4.3 Satz (Peripherie-Winkel-Satz) Es sei K := K(M ; r) ein Kreis sowie A, B, C, C 0 ∈ K,
wobei genau C zwischen A und B liege. Dann gilt
^BCA = π −
^AM B
^AM B
bzw. ^AC 0 B =
.
2
2
Beweis Wir beweisen nur die erste Aussage und überlassen die zweite dem Leser. Dazu setze
man α := ^AM C und β := ^CM B. Weil die Dreiecke M AC und M CB gleichschenklig sind,
gelten aufgrund Basiswinkel- 3.2.6 und Winkelsummensatz 3.2.3
1
1
^M CA = (π − α) und ^BCM = (π − β).
2
2
Addition liefert die Behauptung.
Ein Spezialfall ist der berühmte Satz des Thales:
34
Klassische euklidische Geometrie
Abbildung 3.3: Der Peripherie-Winkel-Satz
3.4.4 Korollar (Satz des Thales) Sind A, B ∈ K(M ; r), sodass M ∈ AB gilt (d.h. AB) ist
ein Kreisdurchmesser, und gilt C ∈ K(M ; r), so gilt ^BCA = π2 .
3.4.5 Aufgabe Man zeige die Umkehrung des Peripherie-Winkel-Satzes: Ist ABC ein Dreieck
A
und K(M ; r) ein Kreis mit A, B ∈ K(M ; r), sodass ^ACB = π − ^BM
gilt, dann gilt C ∈
2
K(M ; r).
Es gibt eine Vielzahl weiterer Aussagen über Punkte auf einem Kreis, die sich aus dem (oder
ähnlich wie der) Peripheriewinkelsatz ableiten lassen. Wir stellen beispielhaft eine weitere davon vor und animieren den Leser dazu, sich weitere Aussagen selbst zu überlegen oder in der
Literatur nachzulesen (vgl. [4], Abschnitt 2.3).
3.4.6 Satz (Sehnensatz) Es seien K(M ; r) ein Kreis und A, B, C, D ∈ K(M ; r) paarweise
verschieden mit S = AC ∩ BD. Dann gilt |AS| · |CS| = |BS| · |DS|.
Abbildung 3.4: Der Sehnensatz
3.4 Sätze über Polygone am Kreis
35
Beweis
Nach dem Peripheriewinkelsatz 3.4.3 hat man ^ABD = ^ACD. Ferner gilt aufgrunde des Scheitelwinkelsatzes 2.2.23 ^ASB = ^CSD. Somit sind aufgrund Aufgabe 3.3.15
die Dreiecke ABS und DSC ähnlich, woraus unmittelbar die Behauptung folgt.
Für Dreiecke, die den Satz des Thales erfüllen, folgt, dass alle Eckpunkte des Dreiecks auf einem
Kreis liegen. Diese Aussage gilt jedoch in der Euklidischen Geometrie immer.
3.4.7 Definition Es sei AB eine Strecke mit Mittelpunkt M . Eine Gerade m mit M ∈ m, die
orthogonal zu AB ist, heißt Mittelsenkrechte von AB.
3.4.8 Lemma Es sei m Mittelsenkrechte von AB und P ∈ m. Dann gilt
|AP | = |BP |.
Beweis
Die Dreiecke AM P und P M B sind nach dem Kongruenzsatz 3.1.16 kongruent,
woraus die Behauptung folgt.
Als unmittelbare Folgerung erhält man
3.4.9 Satz-Definition Die Mittelsenkrechten des Dreiecks schneiden sich in einem Punkt, der
von allen Eckpunkten den gleichen Abstand hat. Dieser heißt Umkreismittelpunkt des Dreiecks.
Beweis Der Beweis ist eine direkte Folgerung aus der Transitivität der Gleichheitsrelation
und dem Lemma 3.4.8. Die Tatsache, dass sich je zwei Mittelsenkrechten immer schneiden, folgt
aus dem Parallelenaxiom und bleibt dem Leser überlassen.
Der Peripheriewinkelsatz hilft bei der Frage, wann ein Viereck einen Umkreis besitzt. In unserer
Notation ist ein Viereck ABCD ein konvexes n-Eck mit vier Eckpunkten A, B, C und D, sodass
die Strecken (Seiten) AB, BC, CD und DA sich nicht schneiden, die Diagonalen AC und BD
dagegen einen gemeinsamen Punkt besitzen. Vierecke, die einen Umkreis besitzen, nennen wir
Sehnenvierecke. Wir werden die Ecken eines Vierecks immer positiv orientiert bezeichnen: Für
ein Sehnenviereck heißt das, dass es vier Zahlen t1 < t2 < t3 < t4 mit t4 − t1 < 2π gibt, sodass
A = γ(t1 ), B = γ(t2 ), C = γ(t3 ) und D = γ(t4 ) gelten, wobei γ die Abbildung aus 3.4.2 ist.
3.4.10 Satz Ein Viereck ist genau dann ein Sehnenviereck, wenn sich gegenüberliegende Winkel zu π ergänzen.
Beweis Die Richtung ⇒“ ist eine unmittelbare Folgerung aus dem Satz 3.4.3. Die umge”
kehrte Richtung überlassen wir dem Leser als Übung.
Für Sehnenvierecke ergibt sich eine interessanter Zusammenhang zwischen den Seitenlängen
und den Diagonalenlängen eines solchen Vierecks.
3.4.11 Satz (Satz von Ptolemaios) Ist ABCD ein Sehnenviereck in positiver Orientierung, so
gilt
|AB| · |CD| + |BC| · |AD| = |AC| · |BD|.
36
Klassische euklidische Geometrie
Abbildung 3.5: Satz von Ptolemaios
Beweis
Wir wählen einen Punkt E ∈ |BD|, sodass ^EAD = ^BAC gilt (dies geht wegen der Möglichkeit, Winkel abzutragen). Wir beschränken uns nun auf den in Abbildung 3.5
dargestellten Fall, dass 2 · ^BAC < ^BAD gilt und überlassen die (analog zu behandelnden)
anderen Fälle dem Leser. Wegen des Peripheriwinkelsatzes 3.4.3 gilt dann ^ADE = ^ACB,
weil beides Winkel über der Sehne AB sind. Da die beiden Dreiecke ABC und AED nach
Konstruktion zudem in den Winkel bei A übereinstimmen, sind sie nach 3.3.15 ähnlich. Daher
gilt
|AC|
|BC|
=
, also |BC| · |AD| = |AC| · |DE|.
|DE|
|AD|
Weiter gelten ^BAE = ^CAD sowie ^DCA = ^EBA (ersteres nach Wahl von E, letzeres
wieder nach 3.4.3). Somit sind auch die Dreiecke ABE und ACD ähnlich, d.h.
|AC|
|CD|
=
, also |AB| · |CD| = |AC| · |BE|.
|BE|
|AB|
Addition der beiden Gleichungen liefert die Behauptung.
Im Folgenden betrachten wir noch Kreistangenten.
3.4.12 Definition Eine Gerade g heißt Tangente an den Kreis K(M ; r), wenn die Menge
g ∩ K(M ; r) aus genau einem Punkt besteht.
3.4.13 Bemerkung Es sei g eine Gerade g, K(M ; r) ein Kreis sowie B ∈ K(M ; r) ∩ g. Dann
ist g genau dann Tangente an K(M ; r), falls g⊥M B gilt.
Beweis Man kann g in der Form g = B + Rv mit v 6= 0 schreiben; insbesondere hat man
|BM | = r. Im Folgenden wenden wir 3.2.10 an:
=⇒:“ Ist hv, B − M i =
6 0, so hat man auch
”
s := −
2hB − M, vi
6= 0.
hv, vi
3.5 Besondere Punkte im Dreieck
37
Nachrechnen zeigt, dass für B 0 := B + sv ∈ g ebenfalls |B 0 M | = r gilt. Nun gilt offenbar dann
B 0 6= B, somit besitzt K(M ; r) ∩ g mindestens zwei Elemente, also ist g dann keine Tangente.
⇐=:“ Im Fall hv, B − M i = 0 gilt für jedes t 6= 0 offenbar
”
|B + tv − M |2 = |B − M |2 + t2 |v|2 > r2 ,
somit haben g und K(M ; r) dann außer B keine weiteren gemeinsamen Punkte, also ist g dann
Tangente an K(M ; r).
3.4.14 Definition Ein Viereck ABCD heißt ein Tangentenviereck, wenn es einen Kreis K
gibt, sodass alle Seiten AB, BC, CD und AD Tangenten an K sind.
3.4.15 Aufgabe Man zeige, dass ein Viereck ABCD genau dann ein Tangentenviereck ist,
wenn |AB| + |CD| = |AD| + |BC| gilt.
3.4.16 Aufgabe Es seien K(M ; r) ein Kreis und E1 , . . . , En Punkte auf dem Kreisrand.
a) Man zeige, dass es genau n2 Verbindungslinien Ei Ej für 1 ≤ i < j ≤ n gibt.
_
_
b) Die Kreisbögen Ei Ei+1 , E1 En und die Verbindungslinien Ei Ej unterteilen den Kreis in gn
Gebiete. Man untersuche, wie groß gn maximal werden kann.
3.5
Besondere Punkte im Dreieck
In Dreiecken gibt es einige besonders ausgezeichnete Punkte, denen wir uns in diesem Abschnitt
zuwenden wollen. Zunächst gehen wir auf zwei Sätze ein, die besondere Lagen in einem Dreieck
kennzeichnen.
3.5.1 Definition Es sei P ∈ AB \ {A, B} ein Punkt auf der Geraden AB. Dann heißt die Zahl
τ mit P = (1 − τ )A + τ B das Teilverhältnis von P bzgl. des (geordneten) Paares (A, B).
3.5.2 Bemerkung
1. Ist τ das Teilverhältnis von P bzgl. (A, B), so ist 1 − τ das Teilverhältnis von P bzgl (B, A).
2. Ist τ das Teilverhältnis von P bzgl. (A, B), so gelten
|AP |
= |τ | und
|AB|
|BP |
= |1 − τ |.
|AB|
3.5.3 Satz (Satz von Menelaos) Es seien ABC ein Dreieck, sowie A0 ∈ BC \ {B, C}, B 0 ∈
CA \ {C, A} und C 0 ∈ AB \ {A, B}, und α, β und γ die zugehörigen Teilverhältnisse, also
A0 = αB + (1 − α)C,
B 0 = βC + (1 − β)A und C 0 = γA + (1 − γ)B.
Dann liegen die Punkte A0 , B 0 und C 0 genau dann auf einer Geraden, wenn
1−α 1−β 1−γ
·
·
= −1
α
β
γ
gilt.
38
Klassische euklidische Geometrie
Abbildung 3.6: Satz von Menelaos
Beweis
Es gelten
A0 − B 0 = (1 − β)(C − A) + α(B − C) = (1 − β − α)(C − A) + α(B − A)
und
A0 − C 0 = (1 − α)(C − B) + γ(B − A) = (1 − α)(C − A) + (α + γ − 1)(B − A).
Die Punkte A0 , B 0 und C 0 liegen genau dann auf einer Geraden, wenn A0 − B 0 und A0 − C 0 linear
2
abhängig sind. Da die Vektoren C− A und B − A eine Basis
des R bilden, ist dies genau dann
1−β−α
α
der Fall, wenn die Matrix M :=
singulär ist, also
1−α
α+γ−1
0 = det(M ) = (1 − β − α)(α + γ − 1) − α(1 − α) = −1 + α + β + γ − αβ − βγ − αγ
gilt. Addition von αβγ und Division durch −αβγ liefert die Behauptung.
3.5.4 Satz (Satz von Ceva) Es seien ABC ein Dreieck, sowie A0 ∈ BC \ {B, C}, B 0 ∈ CA \
{C, A} und C 0 ∈ AB \ {A, B}, mit
A0 = αB + (1 − α)C,
B 0 = βC + (1 − β)A und C 0 = γA + (1 − γ)B.
Dann schneiden sich die Geraden AA0 , BB 0 und CC 0 genau dann in einem Punkt S, wenn
1−α 1−β 1−γ
·
·
=1
α
β
γ
gilt.
Beweis
Wir zeigen nur ⇒“ und überlassen die andere Richtung dem Leser. Es sei S =
”
σA0 + (1 − σ)A. Aus A0 = αB + (1 − α)C erhält man
C=
−α
1
B+
A0
1−α
1−α
und
B=
1 0 α−1
A +
.C
α
α
3.5 Besondere Punkte im Dreieck
39
Abbildung 3.7: Satz von Ceva
Wendet man nun den Satz von Menelaos 3.5.3 einmal auf das Dreieck ABA0 und die Gerade
CC 0 und ein weiteres Mal auf das Dreieck A0 CA und die Gerade CC 0 an, so erhält man
1−γ
·
γ
1
1−α
−α
1−α
σ
1−σ
= −1 und
·
·
σ
1−σ
a−1
α
1
α
Multiplikation der zwei Gleichungen liefert die Behauptung.
·
1−β
= −1.
β
3.5.5 Definition Es sei ABC ein (nicht entartetes) Dreieck.
1. Die Gerade, die den Winkel ^BAC halbiert, heißt Winkelhalbierende von ^BAC. Die
Gerade durch A und den Mittelpunkt von BC heißt Seitenhalbierende von BC. Die zu
BC orthogonale Gerade durch A heißt Höhe von BC
2. Der Schnittpunkt U der Mittelsenkrechten heißt Umkreismittelpunkt, der Schnittpunkt
I der Winkelhalbierenden Inkreismittelpunkt, der Schnittpunkt H der Höhen Höhenschnittpunkt und der Schnittpunkt S der Seitenhalbierenden Schwerpunkt des Dreiecks
ABC.
3.5.6 Aufgabe Es sei ABC ein (nicht entartetes) Dreieck.
1. Man zeige, dass die obige Definition 3.5.5 wohldefiniert ist, d.h. die entsprechenden Geraden schneiden sich jeweils in einem Punkt.
2. Man zeige, dass es einen Kreis mit Mittelpunkt I gibt, sodass AB, BC sowie AC Tangenten an diesen Kreis sind.
Im Allgemeinen sind alle diese vier Punkte paarweise verschieden; in einem regelmäßigen Dreieck (mit drei gleich langen Seiten) fallen alle vier zusammen. Je nach Blickwinkel könnte man
jeden als eine Art Mittelpunkt betrachten, wobei dabei Vorsicht angesagt ist: Der Höhenschnittpunkt etwa braucht im Allgemeinen nicht im Innern des Dreiecks zu liegen!
40
Klassische euklidische Geometrie
Abbildung 3.8: Die Mittelpunkte“ eines Dreiecks
”
3.5.7 Satz (Eulersche Gerade) In jedem Dreieck liegen der Umkreismittelpunkt U , der Höhenschnittpunkt H und der Schwerpunkt S auf einer Geraden. Weiter gilt |SH| = 2|SU |
Beweis
Es seien A0 , B 0 , C 0 die Seitenmitten der Seiten a, b, c und A0 B 0 C 0 das resultierende
Abbildung 3.9: Die Eulersche Gerade
Mittendreieck des Dreiecks ABC. Offenbar stimmen die beiden Dreiecke ABC und A0 B 0 C 0 in
ihren Winkeln überein, sie sind also ähnlich. Gemäß Aufgabe 3.3.15 gehen sie also durch eine
Ähnlichkeitstransformation auseinander vor. Weil A und A0 sowie B und B 0 und auch C und C 0
auf Geraden durch S liegen, entsteht A0 B 0 C 0 offenbar aus ABC durch eine zentrische Streckung
mit Streckfaktor λ = − 12 und Zentrum S. Dabei wird die Höhe hC auf die Höhe hC 0 abgebildet,
d.h. auf die Mittelsenkrechte von c. Analoge Aussagen gelten ebenso für die anderen Höhen.
3.5 Besondere Punkte im Dreieck
41
Dies impliziert, dass U das Bild von H unter dieser zentrischen Streckung ist, also liegen U , S
und H auf einer Geraden, und es gilt |SH| = 2|SU |.
3.5.8 Satz (Neunpunktekreis) In jedem Dreieck ABC liegen die Seitenmitten, die Höhenfußpunkte und die Höhenabschnittsmitten auf einem Kreis.
Die Höhenabschnittsmitte der Höhe zu BC ist dabei der Mittelpunkt der Strecke AH.
Beweis
Wir bezeichnen die Seitenmitten wieder mit A0 , B 0 und C 0 , die Höhenfußpunkte
Abbildung 3.10: Der Neunpunktekreis
mit HA , HB und HC sowie die Höhenabschnittsmitten mit D, E und F . Die Dreiecke B 0 A0 C,
A0 B 0 C 0 sowie A0 B 0 HC sind jeweils paarweise kongruent, damit folgt
^A0 HC B 0 = ^B 0 CA0 .
Damit liegen nach der Umkehrung des Peripherie-Winkel-Satz 3.4.5 die Punkte HC , A0 , B 0 und
C 0 auf einem Kreis, der zwangsläufig der Umkreis des Dreiecks A0 , B 0 , C 0 sein muss. Analog
sieht man, dass auch HA und HB auf diesem Kreis liegen. Die Punkte HA , HB und HC können
auch als Höhenfußpunkte des Dreiecks ABH angesehen. Sie liegen also auch auf dem Umkreis
des Seitenmittendreiecks des Dreiecks ABH. Da Kreise durch drei Punkte eindeutig festgelegt
sind, stimmt dieser somit mit dem Umkreis des Dreiecks A0 B 0 C 0 überein. Somit liegen auch die
Seitenmitten des Dreiecks ABH auf diesem Kreis, also speziell die Punkte D und E. Analog
zeigt man schließlich, dass auch F darauf liegt.
3.5.9 Aufgabe Man zeige, dass der Mittelpunkt des Neunpunktekreises auf der Eulergerade
liegt und (in den Bezeichnungen von 3.5.5) mit dem Mittelpunkt der Strecke U H übereinstimmt.
42
3.6
Klassische euklidische Geometrie
Weitere Sätze am Dreieck
In diesem Abschnitt ergänzen wir einige weitere Ergebnisse über Dreiecke, unter Anderem
den wohl berühmtesten mathematischen Satz, den Satz des Pythagoras, von dem wir mehrere
Beweisvarianten vorstellen wollen.
Wir beginnen mit einer Verallgemeinerung des Satzes des Pythagoras, dem Kosinussatz, der
sich praktisch direkt aus unserer Definition des Winkelwertes ergibt.
3.6.1 Satz (Kosinussatz) Es sei ABC ein Dreieck mit Seitenlängen a = |BC|, b = |AC| und
c = |AB| sowie Innenwinkelwerten α = ^BAC, β = ^CBA und γ = ^ACB. Dann gilt
2ab cos(γ) = a2 + b2 − c2 .
Beweis
Sind v = B − C und w = A − C, so gilt
1
(kvk2 + kwk2 − kv − wk2 )
a2 + b 2 − c 2
hv, wi
= 2
=
,
cos(γ) =
kvk · kwk
kvk · kwk
2ab
woraus die Behauptung folgt.
3.6.2 Korollar (Satz des Pythagoras) Ist ABC ein Dreieck mit rechtem Winkel bei C und
Seitenlängen a, b, c = |AB|, so gilt a2 + b2 = c2 .
3.6.3 Satz (Sinussatz) Ist ABC ein Dreieck wie in 3.6.1, so gilt
sin(β)
sin(γ)
sin(α)
=
=
.
a
b
c
Beweis
Quadriert man die Gleichung des Kosinussatzes, so erhält man
4a2 b2 cos2 (γ) = a4 + b4 + c4 + 2a2 b2 − 2b2 c2 − 2a2 c2 .
Beachtet man cos2 (γ) = 1 − sin2 (γ), erhält man damit
−4a2 b2 sin2 (γ) = a4 + b4 + c4 − 2a2 b2 − 2a2 c2 − 2b2 c2 .
In dieser Gleichung ist die rechte Seite invariant unter Permutationen von a, b und c, es gilt
also
−4a2 b2 sin2 (γ) = −4c2 a2 sin2 (β) = 4b2 c2 sin2 (α).
Offenbar impliziert dies
sin2 (α)
sin2 (β)
sin2 (γ)
=
=
;
a2
b2
c2
da in einem Dreieck alle Sinuswerte der Winkel und alle Seitenlängen positiv sind, ergibt sich
die Behauptung.
Wie versprochen, geben wir im Folgenden einige Beweisvarianten für den Satz des Pythagoras.
Wir verwenden dabei naiv den Begriff des Flächeninhalts und benutzen ebenso ohne Beweis,
3.6 Weitere Sätze am Dreieck
43
dass zerlegungsgleiche Figuren den gleichen Flächeninhalt besitzen. Insbesondere verwenden
wir, dass ein Rechteck mit Seitenlängen a und b den Inhalt ab besitzt.
Beweis (Variante 1) Dieser Beweis findet sich bereits in Werken der indischen und chinesischen Mathematik und wird dort oftmals nur als Zeichnung angegeben!
Der wohl älteste bekannte Beweis geht auf Euklid zurück und zeigt eine exakte Flächenzerlegung.
Beweis (Variante 2) Man errichte über den Seiten des Dreiecks ABC jeweils die Quadrate
und benenne die Eckpunkte des Quadrats über der Seite CB mit J und H. Weiter seien L
und N die Eckpunkte des Quadrats über AB. Es sei h eine zu AB senkrechte Gerade durch
C, welche AB in P und LN in Q schneide. Die Gerade g sei parallel zu AB und enthalte J.
Der Schnittpunkt von CH mit g sei R. Zur Veranschaulichung betrachte man die Abbildung
3.11. Dann gilt: Das Dreieck ABC und das Dreieck RHJ sind nach dem Kongruenzsatz 3.2.14
kongruent, also sind das Quadrat CBIH und das Parallelogramm ABJR flächengleich. Es sei
f : R2 → R2 die Drehung um B mit Drehwinkel ϕ = π2 . Dann gilt f (J) = C, f (R) = R0 ,
f (A) = N und f (B) = B, insbesondere sind auch BJHC und BCR0 N flächengleich. Die
Dreiecke N R0 Q und BCP sind nach dem Kongruenzsatz 3.1.16 kongruent, da |R0 C| = |QP |
gilt. Somit sind BJHC und QN BP flächengleich. Analog zeigt man die Flächengleichheit des
Quadrats über AC mit dem Viereck LQP A, woraus man die Behauptung erhält.
Aus dem Beweis von Euklid folgt unmittelbar der Satz des Euklids (auch Kathetensatz) genannt.
3.6.4 Korollar In den Bezeichnungen des letzten Beweises gelten |BC|2 = |BP | · |AB| und
|AC|2 = |AP | · |AB|.
3.6.5 Aufgabe Man zeige den Höhensatz: In obiger Situation gilt |P C|2 = |AP | · |BP |.
Wir geben noch eine sehr einfache Beweisvariante, die auf die Ähnlichkeit der Dreiecke in der
Figur 3.11 zurückgeht.
44
Klassische euklidische Geometrie
Abbildung 3.11: Satz des Euklid
Beweis (Variante 3) Wir verwenden die Bezeichnungen der Figur 3.11. Das Dreieck BCP
und das Dreieck ABC sind ähnlich (vgl. 3.3.15), daher gilt
|BP |
|BC|
=
,
|AB|
|BC|
also |BC|2 = |BP | · |AB|, also genau die Aussage des Satzes des Euklid. Wie im Euklidschen
Beweis des Satzes des Pythagoras folgt daraus die Behauptung.
Abschließend geben wir noch eine etwas ausgefallenere Variante, die den Satz des Ptolemaios
3.4.11 verwendet:
Beweis (Variante 4) Es sei K := K(M, r) der Umkreis des Dreiecks ABC sowie C 0 der zweite
Schnittpunkt von CM mit K. Nach der Umkehrung 3.4.5 des Satz des Thales gilt M ∈ AB.
Weiter ist das Viereck AC 0 BC nach dem Satz des Thales 3.4.4 ein Rechteck. Insbesondere
gelten c = |AB| = |CC 0 |, a = |BC| = |AC 0 | und b = |AC| = |BC 0 |. Der Satz des Ptolemaios
3.4.11 liefert nun
c2 = |AB| · |CC 0 | = |AC 0 | · |BC| + |BC 0 | · |AC| = a2 + b2 ,
3.6 Weitere Sätze am Dreieck
45
also die Behauptung.
Bereits in der Antike wurde auch die Umkehrung des Satzes des Pythagoras verwendet, die sich
offenbar ebenfalls unmittelbar aus 3.6.1 ergibt: Gilt in einem Dreieck mit den Seitenlängen a, b
und c die Beziehung a2 + b2 = c2 , so ist das Dreieck rechtwinklig. Man kann sich fragen, wann
in dieser Gleichung die Größen a, b und c ganzzahlig sind.
3.6.6 Definition Ein ganzzahliges Tripel (a; b; c) ∈ Z3 heißt primitives pythagoräisches Tripel,
wenn a2 + b2 = c2 gilt und a, b, c nur die gemeinsamen Teiler −1 und 1 besitzt.
3.6.7 Lemma Ist (a; b; c) ein primitives pythagoräisches Tripel, so ist genau eine der Zahlen
a und b gerade, und c ist ungerade.
Beweis Angenommen, c ist gerade. Dann ist c2 durch 4 teilbar. Reduziert man die Gleichung
a2 + b2 = c2 modulo 4, so erhält man
a2 + b2 ≡4 0.
Da nicht sowohl a als auch b gerade sein können (sonst wäre 2 gemeinsamer Teiler von a, b,
c), kann man ohne Einschränkung a2 ≡4 1 annehmen. Daraus folgt der Widerspruch b2 ≡4 3.
Daher ist c ungerade und damit zwangsläufig genau einer der Zahlen a und b gerade.
3.6.8 Satz Ein Tripel (a; b; c) ist genau dann ein primitives pythagoräisches Tripel mit geradem
b, wenn es teilerfremde Zahlen n, m ∈ Z gibt, von denen genau eine gerade ist, mit n2 − m2 = a,
2nm = b und c = n2 + m2 .
Beweis
Die Richtung ⇐“ ist offenbar richtig. Es bleibt zu zeigen, dass jedes primitive
”
pythagoräische Tripel in der angegebenen Form dargestellt werden kann.
Weil a und c nach Lemma 3.6.7 beide ungerade sind, sind beide Zahlen c + a und c − a durch
2 teilbar. Damit erhält man
2
b2
c 2 − a2
c+a c−a
b
=
=
=
.
2
4
4
2 } | {z
2 }
| {z
=:r
=:s
Es sei nun p eine Primzahl, die r teilt. Dann teilt p auch 2b , also teilt eine gerade Potenz von p
die linke und damit auch die rechte Seite der Gleichung. Würde p auch s teilen, dann würde
p|c =
c+a c−a
c+a c−a
+
und p|a =
−
2
2
2
2
folgen, was ein Widerspruch zur Primitivität des Tripels ist. Somit sind c+a
und analog c−a
2
2
selbst Quadratzahlen. Es gilt also etwa c + a = 2n2 und c − a = 2m2 . Daraus folgt direkt
c = n2 + m2 , a = n2 − m2 und b = ±2nm und es folgt (ggfs. durch Ersetzen von n durch −n)
die Behauptung. Die Aussagen über die Teilbarkeitsbeziehungen zwischen n und m bleiben dem
Leser überlassen.
Kapitel 4
Nicht-Euklidische Geometrien
In diesem Abschnitt diskutieren wir Geometrien, in denen das Parallelenaxiom 2.1.2 nicht erfüllt
ist. Als Beispiel einer Geometrie, in der es überhaupt keine Parallelen gibt, betrachten wir in den
Abschnitten 4.1 und 4.2 die sphärische oder Kugelgeometrie; ein Beispiel einer Geometrie, in der
es mehrere Parallelen zu einer gegebenen Geraden durch einen Punkt außerhalb dieser Geraden
gibt, ist die hyperbolische Geometrie, die wir in den Abschnitten 4.4 bis 4.7 ausführlicher
betrachten werden.
4.1
Grundlagen der sphärischen Geometrie
Die sphärische Geometrie ist aus einem konkreten Anwendungsbezug entstanden: Sie beschreibt
die Geometrie der Erdoberfläche, also die Geometrie der Kugeloberfläche. Für See- und Luftfahrt war die sphärische Geometrie das Grundwerkzeug, um Positionen, Entfernungen und
Winkel auf der Erdoberfläche bestimmen zu können. In diesem Abschnitt werden wir die wesentlichen Aussagen dieser Geometrie und ihre Verbindungen zur elliptischen und projektiven
Geometrie kennenlernen.
4.1.1 Definition Es sei h·, ·i das Standardskalarprodukt auf dem R3 sowie k · k die zugehörige
Norm. Mit S 2 := {x ∈ R3 ; kxk = 1} bezeichnen wir die Oberfläche der Einheitskugel im R3 .
1. Die Punkte der sphärischen Geometrie sind die Elemente von S 2 .
2. Unter Geraden in der sphärischen Geometrie verstehen wir Großkreise auf S 2 , also den
Schnitt von S 2 mit einer Ebene durch den Ursprung.
Zur konkreten Rechnung werden wir den R3 mit der Standardbasis e1 , e2 , e3 ausstatten und
die Koordinaten von Punkten auf S 2 immer in Bezug auf diese Basis angeben.
4.1.2 Bemerkung Ist K ein Großkreis, so wird K durch genau eine Ursprungsebene definiert.
Es gibt dann also einen Vektor u ∈ R3 \ {0} mit
E := E(u) := {x ∈ R3 ; hu, xi = 0}
und K = E ∩ S 2 .
4.1 Grundlagen der sphärischen Geometrie
47
Dabei ist der Vektor u bis auf skalare Vielfache (ungleich Null) eindeutig bestimmt. Er wird
daher oft auch als ein Normalenvektor von E bezeichnet.
Oftmals ist es für das konkrete Arbeiten nützlicher, wenn man mit Kugelkoordinaten“ arbei”
tet:
4.1.3 Lemma Die Abbildung
i π πh
→ S 2 \ {±e3 }, (ϕ, ϑ) 7→ (cos(ϕ) cos(ϑ), sin(ϕ) cos(ϑ), sin(ϑ))
Ψ : ] − π, π] × − ,
2 2
ist bijektiv.
Den Beweis dieses Lemmas bleibt dem Leser zur Übung überlassen.
4.1.4 Definition Die Kugelkoordinaten des Punktes x ∈ S 2 \ {±e3 } ist das gemäß Lemma
4.1.3 eindeutig bestimmte Paar (ϕ, ϑ) ∈] − π, π] × [− π2 mit Ψ(ϕ, ϑ) = x.
Abbildung 4.1: Kugelkoordinaten
In der Literatur wird statt ϑ oft π2 − ϑ gewählt. Wir haben uns für die obige Definition entschieden, um die Analogie zu den Breitenkreisen der Erdkugel passender zu machen. Im folgenden
schreiben wir für x ∈ S 2 \ {±e3 } oft ϕx und ϑx , wenn Ψ(ϕx , ϑx ) = x.
4.1.5 Definition Die Abbildung
d : S 2 × S 2 → R≥0 , (x, y) 7→ arccos(hx, yi)
heißt Sphärenmetrik.
4.1.6 Lemma Die Sphärenmetrik d ist eine Metrik.
48
Nicht-Euklidische Geometrien
Beweis Offenbar gilt für x, y ∈ S 2 die Ungleichung d(x, y) ≥ 0. Weiter hat man d(x, y) = 0
wegen der Ungleichung von Cauchy-Schwartz genau dann, wenn x = λy ist. Aufgrund von
kxk = kyk = 1 folgt λ = ±1. Im Falle λ = −1 gilt aber x = −y und daher d(x, y) = π 6= 0.
Die Symmetrie ist offensichtlich. Es bleibt die Dreiecksungleichung zu zeigen. Dazu wählen
wir x, y, z ∈ S 2 und drehen die Kugel (Anwenden einer orthogonalen Transformation) so, dass
x = (1, 0, 0), y = (cos(ϕ), sin(ϕ), 0) und schließlich z = (cos(α) cos(ϑ), sin(α) cos(ϑ), sin(ϑ))
(gemäß 4.1.3) gelten. Offenbar ist dies immer möglich. Da der Arkuskosinus monoton fallend
ist, gelten
d(x, y) = ϕ, und d(x, z) = arccos(cos(α) cos(ϑ)) ≥ arccos(cos(α)) = α.
Ist also α ≥ ϕ, ergibt sich hieraus bereits die Behauptung. Im anderen Fall (α < ϕ), hat man
d(z, y) = arccos(cos(ϕ) cos(α) cos(ϑ) + sin(ϕ) sin(α) cos(ϑ))
≥ arccos(cos(ϕ) cos(α) + sin(ϕ) sin(α)) = ϕ − α,
Damit erhält man schließlich
d(x, y) = α + ϕ − α ≤ d(x, z) + d(z, y).
4.1.7 Aufgabe Man zeige:
sin
d(x, y)
2
=
||x − y||
.
2
4.1.8 Satz Ist γ : [0, 1] → S 2 ein stetig differenzierbarer Weg mit γ(0) = x und γ(1) = y, so
gilt
Z1
kγ 0 (t)|k dt ≥ d(x, y).
0
Beweis Ohne Einschränkung können wir durch Drehung der Kugel annehmen, dass ϕx = ϕy
gilt, d.h. x und y liegen anschaulich auf dem gleichen Großkreis durch (0, 0, 1) (Längengrad).
Dann gilt offenbar d(x, y) = |ϑx − ϑy |. Wir schreiben γ in der Form
cos(ϕ(t)) cos(ϑ(t))
γ(t) = sin(ϕ(t)) cos(ϑ(t)) .
sin(ϑ(t))
Es ist leicht einzusehen, dass sowohl ϕ als auch ϑ stückweise stetig differenzierbar sind. Dann
gilt
− sin(ϕ(t))
− cos(ϕ(t)) sin(ϑ(t)
γ 0 (t) = ϕ0 (t) cos(ϑ(t)) cos(ϕ(t)) + ϑ0 (t) − sin(ϕ(t)) sin(ϑ(t)) .
0
cos(ϑ(t))
Daraus folgt
kγ 0 (t)k2 = (ϕ0 (t))2 cos2 (ϑ(t)) + (ϑ0 (t))2 ≥ (ϑ0 (t))2
4.1 Grundlagen der sphärischen Geometrie
und daher
Z1
0
kγ 0 (t)k dt ≥
Zb
a
49
1
Z
0
0
|ϑ (t)| dt ≥ ϑ (t) dt = d(x, y).
0
4.1.9 Aufgabe Man zeige, dass in Satz 4.1.8 genau dann Gleichheit gilt, wenn γ längs des
kürzeren Großkreisbogens von x nach y verläuft.
Man sieht damit, dass die kürzeste Verbindung zweier Punkte genau durch einen Großkreis
gegeben ist, was exakt die Idee der Gerade wiedergibt. Wir geben noch an, wie man den
Abstand mit Hilfe von Kugelkoordinaten angeben kann.
4.1.10 Bemerkung Es seien x, y ∈ S 2 mit x = (cos(ϕ1 ) cos(ϑ1 ), sin(ϕ1 ) cos(ϑ1 ), sin(ϑ1 )) und
y = (cos(ϕ2 ) cos(ϑ2 ), sin(ϕ2 ) cos(ϑ2 ), sin(ϑ2 )). Dann gilt
cos(d(x, y)) = cos(ϕ1 − ϕ2 ) cos(ϑ1 ) cos(ϑ2 ) + sin(ϑ1 ) sin(ϑ2 ).
Mit dieser Formel lassen sich bequem Entfernungen zweier Punkte auf der Erde basierend auf
deren geographischen Koordinaten bestimmen.
Als nächste metrische Größe führen wir Winkel ein. Dazu ist zu beachten, dass eine einfache
Definition einer Zwischenbeziehung in der spährischen Geometrie und daher auch die Definition
eines Halbstrahls nicht ganz so offensichtlich ist. Wir definieren daher zunächst etwas spezieller,
den Winkel zwischen zwei Geraden, also zwei Großkreisen.
4.1.11 Definition Es seien K1 und K2 zwei Großkreise.
1. Sind K1 und K2 durch Schnitt von S 2 mit den Ursprungsebenen E1 und E2 entstanden,
so heißt
|hn , n i| E1
E2
^(K1 , K2 ) := arccos
knE1 k · knE2 k
der Winkelwert zwischen K1 und K2 , wobei nE1 und nE2 die gemäß 4.1.2 zu E1 bzw. E2
gehörenden Normalenvektoren sind.
2. Zwei Großkreise heißen orthogonal, wenn für ihren Winkelwert ^(K1 , K2 ) =
π
2
gilt.
4.1.12 Satz-Definition Es sei K ein Großkreis. Dann schneiden sich alle zu K orthogonalen
Großkreise in einem Antipodenpaar, welches als das Polpaar (oder Pole) von K bezeichnet
wird.
Beweis Es sei E die durch K definierte Ebene mit Normalenvektor n. Ohne Einschränkung
können wir |n| = 1 annehmen. Ist nun K 0 ein zu K orthogonaler Großkreis mit Normalenvektor
n0 , so gilt hn0 , ni = 0, daher folgt {n, −n} ⊂ K 0 ∩ S 2 . Offenbar schneiden sich je zwei Großkreise
genau in zwei gegenüberliegenden Punkten, woraus man die Behauptung erhält.
50
4.2
Nicht-Euklidische Geometrien
Dreiecke in der sphärischen Geometrie
Wir wenden uns in diesem Abschnitt noch Polygonen in der sphärischen Geometrie zu, beschränken uns dabei allerdings auf Zwei- und Dreiecke, wobei wir Dreiecke ausführlicher diskutieren werden. Abschließend gehen wir noch kurz auf den Zusammenhang der sphärischen
Geometrie mit der projektiven Geometrie ein.
4.2.1 Definition Ein (Kugel-)Zweieck ist ein durch zwei Großkreise K und K 0 begrenztes
Gebiet Z. Man nennt ^(Z) := ^(K, K 0 ) den Winkel des Zweiecks.
Man beachte, dass nach Definition der Winkel eines Zweiecks maximal den Wert
kann.
π
2
annehmen
4.2.2 Bemerkung Zwei verschiedene Großkreise begrenzen immer vier Gebiete, von denen
jeweils zwei den gleichen Inhalt haben. Für den Inhalt der kleineren dieser Gebiete gilt dabei
F1 (Z) = 2^(Z), die größeren haben den Inhalt F2 (Z) = 2(π − ^(Z)).
Wählt man drei (nicht antipodale) Punkte auf S 2 , so definieren je zwei davon einen Großkreis.
Fordert man, dass die drei Punkte nicht auf einem gemeinsamen Großkreis liegen, so erhält
man insgesamt drei Großkreise, die S 2 in acht Gebiete unterteilen. Ein derartiges Gebiet nennt
man ein sphärisches Dreieck. Üblicherweise interessiert man sich dabei nur für die Dreiecke,
bei denen die Seitenlängen kleiner als π sind, bei denen also Punkte und Seiten vollständig auf
einer offenen Halbkugel liegen.
4.2.3 Definition Ein Dreieck ABC heißt Eulersches Dreieck, falls det(A, B, C) 6= 0 gilt.
Im Folgenden verwenden wir immer folgende Konvention: Ein Eulersches Dreieck ABC möge
so orientiert sein, dass det(A, B, C) > 0 gilt. Weiter bezeichne BC die A , AC die B sowie AB
die C gegenüberliegende Seiten: Anschaulich ist etwa BC der kürzere der beiden Abschnitte
des Großkreises durch B und C, in die B und C diesen Großkreis teilen. Für die Seitenlängen
gilt dann offenbar:
4.2.4 Bemerkung Es seien A, B, C ∈ S 2 die Ecken eines Eulerschen Dreiecks und a, b sowie
c die Längen der A, B bzw. C gegenüberliegenden Seite. Dann gelten
a = d(B, C) = arccos(hB, Ci), b = d(A, C) = arccos(hA, Ci)
und c = d(A, B) = arccos(hA, Bi).
Die Winkel eines Eulerschen Dreiecks definieren wir folgendermaßen:
4.2.5 Definition Es sei ABC ein Eulersches Dreieck. Dann sind die Werte α, β, γ der Innenwinkel bei A, B bzw. C definiert durch
hA × B, A × Ci
hB × C, B × Ai
α := arccos
, β := arccos
,
kA × Bk · kA × Ck
kB × Ck · kB × Ak
hC × B, C × Ai
γ := arccos
kC × B| · kC × Ak
4.2 Dreiecke in der sphärischen Geometrie
51
Die anschauliche Idee dabei ist, dass die Innenwinkel gerade die Winkel zwischen den Tangentialvektoren an die Kugel an der entsprechende Ecke in Richtung der anderen Ecken sind, wie
die folgende Aufgabe 4.2.6 zeigt:
4.2.6 Aufgabe Es seien A, B, C ∈ S 2 .
a) Man zeige: (A × B) × A = B − hA, BiA.
b) Man erläutere die Aussage: (A × B) × A ist der Tangentialvektor an die Einheitskugel,
”
welcher von A in Richtung B zeigt.“
c) Man zeige:
h(A × B) × A, (A × C) × Ai
hA × B, A × Ci
=
.
kA × Bk · kA × Ck
k(A × B) × Ak · k(A × C) × Ak
Abbildung 4.2: Ein Eulersches Dreieck
Um manche Rechnung übersichtlicher zu gestalten, benötigen wir einige wohl bekannte Aussagen über das Vektorprodukt.
4.2.7 Lemma Für alle X, Y, Z ∈ S 2 gelten
1. kX × Y k = sin(d(X, Y )),
2. hX × Y, Zi = det(X, Y, Z),
3. hX × Y, X × Zi = hY, Zi − hX, Y i · hX, Zi,
4. (X × Y ) × (X × Z) = det(X, Y, Z) · X.
Beweis Für die Aussagen 1. und 2. vgl. etwa [20], Bemerkung 5.2.2, für 3. und 4. vgl. die
Übungsaufgabe 2 zu 5.2. in [20].
52
Nicht-Euklidische Geometrien
Als erste Aussage über sphärische Dreiecke zeigen wir den Seitenkosinussatz, mit dessen Hilfe
man aus den Seitenlängen eines Eulerschen Dreiecks die Winkelwerte berechnen kann.
4.2.8 Satz (Seitenkosinussatz) Es sei ABC ein Eulersches Dreieck mit Seitenlängen a, b und
c sowie Innenwinkeln α, β und γ. Dann gilt
cos(a) = cos(b) cos(c) + sin(b) sin(c) cos(α).
Beweis
Wegen Bemerkung 4.2.4 und Lemma 4.2.7 3. hat man
cos(α) =
hB, Ci − hA, Bi · hA, Ci
cos(a) − cos(c) cos(b)
hA × B, A × Ci
=
=
,
kA × Bk · kA × Ck
sin(d(A, B)) sin(d(A, C))
sin(c) sin(b)
woraus man die Behauptung erhält.
4.2.9 Korollar Im rechtwinkligen sphärischen Dreieck gilt in der Notation von 4.2.8 im Falle
von α = π2 der sphärische Pythagoras
cos(a) = cos(b) cos(c).
4.2.10 Lemma Es seien ABC ein Eulersches Dreieck und α der Wert des Winkels bei A sowie
b = d(A, C) und c = d(A, B). Dann gilt
sin(b) sin(c) sin(α) = det(A, B, C).
Beweis
Bekanntlich gilt (vgl. wieder [20], Bemerkung 5.2.2)
k(A × B) × (A × C)k = sin(α)kA × Bk · kA × Ck.
Damit folgt die Behauptung aus Lemma 4.2.7 4.
Mit Hilfe der bisherigen Ergebnisse folgt nun die nächste Aussage, der Sinussatz der sphärischen
Geometrie:
4.2.11 Satz (Sphärischer Sinussatz) Es sei ABC ein Eulersches Dreieck mit Seitenlängen a, b
und c sowie Innenwinkeln α, β und γ. Dann gilt
sin(α)
sin(β)
sin(γ)
=
=
.
sin(a)
sin(b)
sin(c)
Beweis
Aus Lemma 4.2.10 folgt
sin(α)
det(A, B, C)
=
.
sin(a)
sin(a) sin(b) sin(c)
Da die rechte Seite dieser Gleichung nicht vom betrachteten Eckpunkt abhängt, muss das auch
auf die linke Seite zutreffen. Daher ergeben alle Quotienten den gleichen Wert.
4.2 Dreiecke in der sphärischen Geometrie
53
4.2.12 Aufgabe Man untersuche, ob für Eulersche Dreiecke Kongruenzsätze der Form ssw
oder wws gelten.
4.2.13 Definition Ist ABC ein Dreieck ein Eulersches Dreieck, so heißt das durch die Punkte
PA :=
1
1
1
B × C, PB :=
C × A und PC :=
A×B
kB × Ck
kC × Ak
kA × Bk
definierte Dreieck PA PB PC das Poldreieck zu ABC.
Man beachte, dass etwa PA gerade einer der beiden in 4.1.12 definierten Pole des durch B und
C definierten Großkreises ist; anschaulich liegt er, wenn man diesen Kreis von B in Richtung
C durchläuft, auf der linken Seite.
Abbildung 4.3: Das Poldreieck
4.2.14 Bemerkung Das Poldreieck PA PB PC eines Eulerschen Dreiecks ABC ist wieder ein
Eulersches Dreieck, genauer gilt det(PA , PB , PC ) > 0.
Beweis Offenbar haben die Determinanten det(PA , PB , PC ) und det(B × C, C × A, A × B)
das gleiche Vorzeichen. Für dieses gilt aber unter Ausnutzung des Lemmas 4.2.7 (die Nummern
geben die entsprechende Aussage an)
2.
det(B × C, C × A, A × B) = − det(C × B, C × A, A × B) = −h(C × B) × (C × A), A × Bi
4.
= −hdet(C, B, A)C, A × Bi = det(A, B, C)hA × B, Ci
2.
= (det(A, B, C))2 > 0.
4.2.15 Lemma Es sei ABC ein Eulersches Dreieck. Dann gilt
PA × PB = sin(γ)C.
54
Nicht-Euklidische Geometrien
Beweis
Nach 4.2.7 1. und 4. gilt
PA × PB =
det(C, B, A)
1
(B × C) × (C × A) = −
C.
sin(a) sin(b)
sin(a) sin(b)
Mit 4.2.10 folgt die Behauptung.
4.2.16 Lemma Es sei ABC ein Eulersches Dreieck mit Seitenlängen a, b und c sowie Innenwinkeln α, β und γ. Ferner sei PA PB PC das Poldreieck von ABC.
1. Das Poldreieck von PA PB PC ist das Dreieck ABC.
2. Sind aP , bP und cP die Seitenlängen sowie αP , βP und γP die Innenwinkel von PA PB PC ,
so gelten
aP = π − α, bP = π − β, cP = π − γ, αP = π − a, βP = π − b und γP = π − c.
Beweis
1. Dies folgt aus 4.2.15, da der Sinus im Intervall [0, π] nichtnegativ ist.
2. Aufgrund von Bemerkung 4.2.4 hat man
cos(aP ) = hPB , PC i =
1
1
·
· hC × A, A × Bi = − cos(α),
kC × Ak kA × Bk
also die erste Aussage. Die anderen Aussagen ergeben sich ähnlich.
Man kann oftmals durch Polarisieren nun weitere Formeln über sphärische Dreiecke erhalten.
Als Beispiel zeigen wir die folgende Aussage, welche besonders interessant ist, weil sie zeigt,
dass in der sphärischen Geometrie ein Eulersches Dreieck bereits durch die Winkel vollständig
bestimmt ist!
4.2.17 Satz (Winkelkosinussatz) Es sei ABC ein Eulersches Dreieck mit Seitenlängen a, b und
c sowie Innenwinkeln α, β und γ. Dann gilt
cos(α) = − cos(β) cos(γ) + sin(β) sin(γ) cos(a).
Beweis Die Behauptung folgt durch Anwendung des Seitenkosinussatzes 4.2.8 auf das Poldreieck des Dreiecks ABC zusammen mit dem Lemma 4.2.16.
4.2.18 Aufgabe Für ein Eulersches Dreieck ABC (mit üblichen Bezeichnungen) zeige man:
a) ABC hat genau dann zwei gleichlange Seiten, wenn die gegenüberliegenden Winkel gleich
groß sind.
b) Es sei S ein Punkt der Seite AB und p := d(A, S), q := d(S, B) sowie s := d(C, S). Dann
gilt:
sin(c) cos(s) = sin(p) cos(a) + sin(q) cos(b).
4.2 Dreiecke in der sphärischen Geometrie
55
4.2.19 Aufgabe Es sei ABC ein Eulersches Dreieck mit Innenwinkeln α, β und γ sowie
PA PB PC das zugehörige Poldreieck. Man zeige, dass die folgenden Aussagen äquivalent sind:
i) (PA , PB , PC ) = (A, B, C),
ii) d(A; C) = d(B; C) = d(A; B) =
iii) α = β = γ =
π
,
2
π
.
2
Im folgenden untersuchen wir noch die Mittelsenkrechten und Winkelhalbierenden eines Eulerschen Dreiecks.
4.2.20 Definition Es seien A, B ∈ S 2 . Dann ist die Mittelsenkrechte mAB := E(n) ∩ S 2 der
Strecke AB durch die Ursprungsebene E(n) mit n := B − A definiert.
Diese Definition macht anschaulich Sinn: Wegen hB − A, B + Ai = 0 liegt der Mittelpunkt von
AB in E(B − A); desweiteren gilt hB − A, A × Bi = 0, also sind die Geraden AB und mAB
orthogonal. Zudem gilt:
4.2.21 Lemma Für x ∈ S 2 gilt genau dann d(x, A) = d(x, B), wenn x ∈ mAB gilt.
Beweis
Es gilt
d(x, A) = d(x, B) ⇐⇒ hx, Ai = hx, Bi ⇐⇒ hx, B − Ai = 0 ⇐⇒ x ∈ mAB .
4.2.22 Satz Es sei ABC ein Eulersches Dreieck. Dann schneiden sich die Mittelsenkrechten
der Seiten von ABC in einem gemeinsamen Punktepaar
U1/2 = ±
1
(A × B + B × C + C × A).
kA × B + B × C + C × Ak
Beweis Es genügt zu zeigen, dass A × B + B × C + C × A auf den die Mittelsenkrechten
definierende Ebenen liegt: Dazu betrachte man etwa
hA × B + B × C + C × A, B − Ai = hC × A, Bi − hB × C, Ai
Lemma 4.2.7
=
det(C, A, B) − det(B, C, A) = 0.
Analog zeigt man dies für die anderen Mittelsenkrechten.
Wie in der Euklidischen Geometrie werden wir den Schnittpunkt der Mittelsenkrechten auch
Umkreismittelpunkt des Dreiecks ABC nennen, wobei wir in 4.2.22 das positive Vorzeichen
wählen. Dies macht Sinn, da nach 4.2.21 der Umkreismittelpunkt von allen Punkten den gleichen Abstand hat.
56
Nicht-Euklidische Geometrien
4.2.23 Definition Ist ABC ein Eulersches Dreieck, so ist wA := S 2 ∩ E(n) mit n := PC − PB
die Winkelhalbierende des Innenwinkels bei A (analog für die anderen Innenwinkel).
Offenbar macht diese Definition wieder anschaulich Sinn, da A ∈ E(n) gilt und ^(E(n), AB) =
^(E(n), AC) gilt.
Damit ist offenbar die Winkelhalbierende eines Innenwinkels eines Eulerschen Dreiecks gleich
der Mittelsenkrechte derjenigen Seite des zugehörigen Poldreiecks, welche dem entsprechenden
Eckpunkt gegenüberliegt. Dies zeigt sofort:
4.2.24 Satz Die Winkelhalbierenden eines Eulerschen Dreiecks schneiden sich in einem gemeinsamen Punktepaar
I1/2 = ±
1
(PA × PB + PB × PC + PC × PA ),
kPA × PB + PB × PC + PC × PA k
wobei PA PB PC das Poldreieck von ABC ist.
Ähnlich wie oben bezeichnen wir den Punkt aus 4.2.24 mit positivem Vorzeichen als den Winkelhalbierendenschnittpunkt von ABC. Man erhält dann die überraschende Folgerung.
4.2.25 Korollar
1. Der Winkelhalbierendenschnittpunkt eines Eulerschen Dreiecks ABC
stimmt mit dem Umkreismittelpunkt seines Poldreiecks PA PB PC und umgekehrt überein.
2. Es gibt Zahlen λ, µ ∈ R, sodass für den Umkreismittelpunkt U und den Inkreismittelpunkt
I eines Eulerschen Dreiecks ABC gilt:
U = λ(sin(a)PA + sin(b)PB + sin(c)PC ),
I = µ(sin(α)A + sin(β)B + sin(γ)C)
Im Folgenden bestimmen wir noch den Flächeninhalt eines Eulerschen Dreiecks: Die drei Großkreise eines Eulerschen Dreiecks bestimmen drei Paare von Zweiecken ZA , ZB und ZC mit den
Winkeln α, β und γ. Ist F (ABC) der Flächeninhalt des Dreiecks ABC, so gilt offenbar
2F (ZA ) + 2F (ZB ) + 2F (ZC ) − 4F (ABC) = O(S 2 ) = 4π,
wobei O(S 2 ) die Oberfläche der Einheitskugel bezeichnet. Wendet man nun Bemerkung 4.2.2
an, so folgt
4α + 4β + 4γ − 4π = 4F (ABC).
Dies zeigt den Satz
4.2.26 Satz In einem Eulerschen Dreieck mit den Innenwinkel α, β und γ und dem Flächeninhalt F (ABC) gilt
F (ABC) = α + β + γ − π.
4.2 Dreiecke in der sphärischen Geometrie
57
Insbesondere zeigt dies, dass in einem sphärischen Dreieck die Winkelsumme immer größer als
π und nicht konstant ist, sondern vom Flächeninhalt des Dreiecks abhängt. Neben der Nichtexistenz von Parallelen ist dies einer der fundamentalen Unterschiede zur klassischen euklidischen
Geometrie.
Die sphärische Geometrie hat jedoch einen Schönheitsfehler: Eine Gerade ist im Allgemeinen
nicht durch zwei Punkte festgelegt. Durch zwei Antipodalpunkte verlaufen offenbar immer
mehrere Geraden (Großkreise). Um dieses Problem zu umgehen, geht man oft zur projektiven
Ebene (auch elliptische Ebene) über.
4.2.27 Definition Auf S 2 sei die Äquivalenzrelation x ∼ y definiert durch
x ∼ y : ⇔ x = ±y.
Es ist eine offensichtliche Übung nachzurechnen, dass die obige Definition in der Tat eine
Äquivalenzrelation liefert.
4.2.28 Definition Die projektive Ebene P2 := S 2 / ∼ ist die Menge der Äquivalenzklassen der
in 4.2.27 definierten Äquivalenzrelation. Mit π : S 2 → P2 bezeichnen wir die Abbildung, die
jedem Punkt seine Äquivalenzklasse zuordnet.
Punkte und Geraden in P2 sind die Bilder von Punkten und Geraden in S 2 unter π.
4.2.29 Bemerkung Für P ∈ S 2 gilt π −1 (π(P )) = {P, −P }. Für einen Großkreis G gilt
π −1 (π(G)) = G.
4.2.30 Satz Die Menge P2 mit den oben definierten Begriffen Punkten und Geraden erfüllt
folgende Eigenschaften:
1. Sind p, q ∈ P2 verschieden, dann gibt es genau eine Gerade g mit p, q ∈ g.
2. Sind g, h verschiedene Geraden, so gibt es genau ein p ∈ P2 mit p ∈ g und p ∈ h.
3. Es gibt p, q, r, s ∈ P2 , so dass die (nach 1. wohldefinierten) Geraden durch je zwei dieser
vier Punkte paarweise verschieden sind.
Beweis
1. Man wähle P, Q ∈ S 2 mit π(P ) = p und π(Q) = q. Dann sind die Vektoren P − O und
Q − O linear unabhängig, also gibt es eine Ursprungsebene E mit O, P, Q ∈ E. Diese
schneidet S 2 in einem Großkreis G und definiert damit eine Gerade durch P und Q. Mit
g := π(G) ist die Existenz gezeigt. Die Eindeutigkeit folgt direkt aus Bemerkung 4.2.29.
2. Man wähle Großkreise G und H mit π(G) = g und π(H) = h. Wegen Bemerkung 4.2.29
gilt
g ∩ h = π(π −1 (g ∩ h)) = π(G ∩ H) = π({P, −P }) = {π(P )}.
58
Nicht-Euklidische Geometrien
3. Man wähle etwa P := (1, 0, 0), Q := (0, 1, 0), R := √12 (1, 0, 1) und S := √12 (0, 1, 1). Dann
rechnet man schnell nach, dass p := π(P ), q := π(Q), r := π(R) und s := π(S) die
Behauptung erfüllen.
Die in Satz 4.2.30 genannten Eigenschaften sind gerade die Axiome der projektiven Ebene für
eine projektive Geometrie. Wir haben also gezeigt, dass die sphärische Geometrie im Prinzip
eine projektive Geometrie ist.
4.3
Geometrie in der komplexen Zahlenebene
Als Gegenstück zur elliptischen Geometrie werden wir uns auch noch der hyperbolischen Geometrie zuwenden. Um diese jedoch besser verstehen zu können, machen wir kurz einen Exkurs
in die komplex projektive Geometrie, zumal diese durchaus auch einige eigene für sich selbst
interessante Resultate liefert.
4.3.1 Definition Auf C2 \ {0} sei eine Äquivalenzrelation definiert durch
(z, w) ∼ (z 0 , w0 ) : ⇔ es gibt ein λ ∈ C \ {0} mit (z, w) = λ(z 0 , w0 ).
b bezeichnet und die
Die Menge der Äquivalenzklassen, die komplex projektive Gerade, sei mit C
Äquivalenzklassenabbildung mit πC . Sind keine Missverständnisse zu befürchten, schreiben wir
einfach nur π.
b vorstellen als die komplexe Ebene C erweitert um einen unendlich
Als Menge kann man sich C
b
fernen Punkt ∞, d.h. C = C ∪ {∞}. Offenbar ist nämlich jeder Punkt (z, w) mit w 6= 0
äquivalent zu ( wz , 1) und daher kann π(z, w) mit wz identifiziert werden. Die einzige andere
Äquivalenzklasse besteht aus Punkten (z, 0) mit z 6= 0 und diese identifiziert man dann mit
dem unendlich fernen Punkt ∞.
b liefert das Modell der Riemannschen Zahlenkugel.
Eine andere Vorstellung von C
4.3.2 Lemma Es sei wieder S 2 := {P ∈ R3 ; kP k = 1} ⊂ R3 die Einheitskugel und ı : C → R3
die kanonische Einbettung, d.h. ı(a + ib) = (a; b; 0). Für z ∈ C sei ferner gz die Gerade durch
N := (0; 0; 1) und ı(z). Dann gibt es genau einen von N verschiedenen Schnittpunkt Sz von gz
mit S 2 und es gilt
1
(2a; 2b; |z|2 − 1).
Sz =
1 + |z|2
Beweis
Der Beweis erfolgt durch Nachrechnen.
In der Notation von 4.3.2 erhält man durch die Abbildung
(
b → S 2 , z 7→ Sz , z ∈ C
S: C
N, z = ∞
(4.1)
4.3 Geometrie in der komplexen Zahlenebene
59
Abbildung 4.4: Die Riemannsche Zahlenkugel
b sogar metrisieren, indem man für z, w ∈ C
b die so
eine Bijektion. Man kann damit den Raum C
genante Sehnenmetrik
σ(z, w) := kS(z) − S(w)|k
mit der Standardnorm auf R3 definiert.
4.3.3 Aufgabe In der Notation von 4.3.2 und (4.1) zeige man:
1. Die Umkehrabbildung von S ist gegeben durch
(
1
b P = (x1 , x2 , x3 ) 7→ 1−x3 (x1 + ix2 ), P 6= N .
S 2 → C,
∞,
P =N
2. Für z, w ∈ C gelten
σ(z, w) = p
2|z − w|
(1 +
|z|2 )(1
+
|w|2 )
und
σ(z, ∞) = p
4.3.4 Definition Eine Möbiustransformation ist eine Abbildung
b → C,
b z 7→ az + b
M: C
cz + d
mit ad − bc 6= 0.
Dabei setzen wir f (− dc ) := ∞ und f (∞) := ac .
Möbiustransformationen entsprechen gerade der Gruppe
P GL(2, C) := {A ∈ C2×2 ; det(A) = 1}/±I2 ,
wie folgende Bemerkung zeigt:
2
1 + |z|2
.
60
Nicht-Euklidische Geometrien
4.3.5 Bemerkung
z 7→
1. Es sei A :=
a b
∈ C2×2 mit det(A) 6= 0 sowie MA die durch
c d
az + b
definierte Möbiustransformation. Ist z = π(u, v) wie in 4.3.1, dann gilt
cz + d
u
MA (z) = π A ·
,
v
d.h. das Diagramm
A
C2 \ {0} −→ C2 \ {0}
↓
↓
MA
b
b
C
−→
C
ist kommutativ.
2. Zwei Matrizen A, A0 ∈ C2×2 mit nicht verschwindender Determinante definieren genau
dann die gleiche Möbiustransformation, wenn es ein λ ∈ C \ {0} gibt mit A = λA0 .
3. Für zwei Matrizen A, B ∈ C2×2 mit nicht verschwindender Determinante und die zugehörigen Möbiustransformationen gilt MAB = MA ◦ MB .
Ist A die eine Möbiustransformation MA definierende Matrix, so heißt det(A) auch die Determinante det(M ) von M . Wie wir in 4.3.5 2. gesehen haben, kann man immer annehmen,
dass det(M ) = 1 gilt. Die beiden in 4.3.5 dargestellten Sichtweisen von Möbiustransformationen sind oftmals sehr praktisch: Beispielsweise lässt sich damit die Umkehrabbildung einer
Möbiustransformation sofort angeben.
4.3.6 Lemma Die Menge der Möbiustransformationen bildet eine Gruppe bzgl. der Verkettung
der Abbildungen, insbesondere sind Möbiustransformationen bijektiv.
Beweis Wir zeigen nur die Bijektivität und überlassen den Rest dem Leser: Offenbar ist die
gegeben durch
Umkehrabbildung von z 7→ az+b
cz+d
f −1 (z) =
dz − b
.
−cz + a
b Dann gibt es genau eine Möbiustransformation M mit
4.3.7 Satz Es seien a, b, c, a0 , b0 , c0 ∈ C.
0
0
0
M (a) = a , M (b) = b und M (c) = c .
Beweis
Für die Existenz seien zunächst a0 = 0, b0 = ∞ und c0 = 1. Dann setzen wir
M (z) :=
(z − a)(c − b)
.
(z − b)(c − a)
Dann gilt offenbar M (a) = 0, M (b) = ∞ und M (c) = 1.
4.3 Geometrie in der komplexen Zahlenebene
61
Im allgemeinen Fall gibt es nach dem ersten Teil des Beweises Möbiustransformationen T und
S mit T (a) = 0, T (b) = ∞, T (c) = 1 sowie S(a0 ) = 0, S(b0 ) = ∞ und S(c0 ) = 1. Offenbar
leistet dann M := S −1 ◦ T das Gewünschte.
Für die Eindeutigkeit reicht es zu zeigen, dass eine Möbiustransformation M mit M (0) = 0,
M (1) = 1 und M (∞) = ∞ die Identität ist. Dies überlassen wir dem Leser.
Ein oftmals sehr nützliches Hilfsmittel der komplexen Geometrie ist das Doppelverhältnis von
vier Punkten.
b paarweise verschieden. Dann ist das Doppelverhältnis
4.3.8 Definition Es seien a, b, c, d ∈ C
dieser vier Punkte im Fall, dass alle endlich sind, definiert durch:
[a, b; c, d] :=
(a − c)(b − d)
.
(a − d)(b − c)
Ist einer der Punkte unendlich, so definiert man das Doppelverhältnis sinngemäß.
Eine einfache Rechnung zeigt sofort
b die Projektion (vgl. 4.3.1) mit π(A) = a,
4.3.9 Bemerkung Es sei π : C2 \ {(0, 0)} → C
π(B) = b, π(C) = c und π(D) = d. Dann gilt
[a, b; c, d] =
det(A, C) · det(B, D)
.
det(A, D) · det(B, C)
Die zweite Beschreibung des Doppelverhältnisses zeigt mit Hilfe der Multiplikativität der Determinante und der Beobachtung 4.3.5 die Invarianz des Doppelverhältnisses unter Möbiustransformationen:
b→C
b eine Möbiustransformation und sind a, b, c, d ∈ C,
b so gilt
4.3.10 Satz Ist M : C
[M (a), M (b); M (c), M (d)] = [a, b; c, d].
4.3.11 Definition Eine reelle Gerade in C ist eine Menge der Form z + Rw, z, w ∈ C. Unter
einem Kreis verstehen wir eine Menge der Form K(z; r) := {w ∈ C; |w − z| = r}.
b können wir Geraden als Kreise, die den Punkt ∞ enthalten, auffassen. Man fasst daher
In C
auch Kreise und Geraden unter dem Begriff verallgemeinerte Kreise zusammen.
4.3.12 Beispiel
1. Die Abbildung z 7→ z1 heißt Inversion. Sie bildet verallgemeinerte Kreise
wieder auf verallgemeinerte Kreise ab und ist winkeltreu.
2. Die Abbildung
z−i
z+i
heißt Cayley-Transformation. Sie bildet die obere Halbebene H := {z ∈ C; Im(z) > 0} in
das Innere des Einheitskreises ab; weiter ist C(R) = S 1 := K(0; 1). Die Umkehrabbildung
von C ist gegeben durch
1+z
C −1 (z) = i
.
1−z
C : z 7→
62
Nicht-Euklidische Geometrien
Die Beweise dieser Aussagen bleiben dem Leser zur Übung überlassen.
4.3.13 Satz Die Gruppe der Möbiustransformationen wird von (reellen) Streckungen, Drehungen, Translationen und der Inversion erzeugt.
az + b
. Wir können annehmen, dass ad − bc = 1 gilt. Ist c = 0, so
cz + d
ist die Behauptung offensichtlich richtig; im Fall c 6= 0 gilt
Beweis
Es sei M (z) =
M (z) =
az + b
a cz + d bc − ad
1
a
1
1
= ·
+
·
= − 2·
,
cz + d
c cz + d
c
cz + d
c c z + dc
woraus man die Behauptung abliest.
Zusammen mit Beispiel 4.3.12 erhält man daraus unmittelbar
4.3.14 Korollar Ist M eine Möbiusabbildung, so ist das Bild eines Kreises oder einer Geraden
wieder ein Kreis oder eine Gerade.
Wegen der Invarianz des Doppelverhältnisses und der Tatsache, dass man Möbiustransformationen auf drei Punkten festlegen kann, erhält man nun auch noch
b ist genau dann
4.3.15 Satz Das Doppelverhältnis [a, b; c, d] von vier Punkten a, b, c, d ∈ C
reell, wenn a, b, c, d auf einem Kreis oder auf einer Gerade liegen.
4.3.16 Aufgabe Man zeige, dass Satz 4.3.15 dem Peripheriewinkelsatz entspricht.
b → C,
b z 7→ 1 , heißt Inversion am Einheitskreis (oder
4.3.17 Definition Die Abbildung ıE : C
z
auch Kreisspiegelung).
4.3.18 Bemerkung Nach Beispiel 4.3.12 ist klar, dass ıE winkeltreu ist und Kreise bzw. Geraden wieder auf Kreise oder Geraden abbildet. Weiter sind die Punkte 0, z und ıE (z) offenbar
(reell) kollinear und es gilt |z| · |ıE (z)| = 1.
Für den nächsten Satz erinnern wir an das Lemma von Schwarz aus der Funktionentheorie:
4.3.19 Lemma (Lemma von Schwarz) Es sei D := {z ∈ C; |z| < 1} die Einheitskreisscheibe.
Ist f : D → D holomorph mit f (0) = 0, dann gilt |f (z)| ≤ |z| für alle z ∈ D sowie |f 0 (0)| ≤ 1.
Gilt in einer der beiden Ungleichungen Gleichheit für ein z ∈ D, so folgt f (z) = eiϕ z mit
ϕ ∈ [0, 2π[.
Für den Beweis vgl. etwa [21], Lemma III.3.7 oder [2], 4 Theorem 13.
4.3.20 Satz Die biholomorphen Abbildungen f : D → D sind von der Form
f (z) = eiϕ
z−a
.
1 − az
4.4 Der hyperbolische Abstandsbegriff
63
Beweis
Dass Abbildungen von der behaupteten Form in der Tat D nach D biholomorph
abbilden, überlassen wir dem Leser. Es sei nun f : D → D biholomorph und a := f −1 (0). Die
Abbildung
z−a
h := f ◦ M −1 (z) mit M (z) :=
1 − az
erfüllt die Voraussetzungen des Lemmas von Schwarz. Daher gilt |h0 (0)| ≤ 1. Ebenso trifft dies
auf h−1 zu, also gilt auch |(h−1 )0 (0)| ≤ 1. Dann muss aber in der Tat Gleichheit gelten. Wieder
das Lemma von Schwarz liefert dann h(z) = eiϕ z, woraus man die Behauptung direkt ableiten
kann.
4.4
Der hyperbolische Abstandsbegriff
Die hyperbolische Geometrie ist in gewissem Sinne das Gegenstück zur elliptischen Geometrie.
Hier gibt es unendlich viele Parallelen zu einer Geraden durch einen gegebenen Punkt außerhalb
der gegebenen Geraden. Es gibt verschiedene Modelle für die hyperbolische Geometrie. Wir
stellen hier ein Modell vor, das auf Herny Poincaré zurückgeht und als oberes HalbebenenModell von Poincaré bezeichnet wird. Dazu sei
H := {z ∈ C; Im(z) > 0}
die obere Halbebene“ in C, d.h. die Menge der komplexen Zahlen mit positivem Imaginärteil.
”
Wir zeigen zunächst, dass eine Möbiustransformation, die H invariant läßt, immer in der Form
M : z 7→
az + b
cz + d
mit a, b, c, d ∈ R sowie det(M ) = ad − bc > 0 dargestellt werden kann. Dazu benutzen wir
folgende Beobachtung:
4.4.1 Lemma Es sei
M : C → C; z 7→
mit a, b, c, d ∈ R. Dann gilt
Im(M (z)) =
Beweis
az + b
cz + d
ad − bc
Im(z).
|cz + d|2
Dies erfolgt durch direktes Nachrechnen.
4.4.2 Satz Ist M : H → H biholomorph, so gibt es ein A ∈ R2×2 mit M = MA und det(A) > 0.
Beweis
Es sei also M : H → H biholomorph. Dann ist mit der Cayley-Transformation C
aus 4.3.12 2. die Abbildung
f := CM C −1 : D → D
64
Nicht-Euklidische Geometrien
eine biholomorphe Abbildung der Einheitskreisscheibe, also nach 4.3.20 eine Möbiustransformation. Dann ist aber auch M = C −1 f C als Verkettung von Möbiustransformationen eine
Möbiustransformation.
Es bleibt zu zeigen, dass man annehmen kann, dass
M (z) =
az + b
cz + d
b := R ∪ {∞} (aus Stetigkeitsgründen) M (R)
b ⊂R
b
reelle Koeffizienten hat. Offenbar gilt mit R
−1 b
b Speziell liefert dies
und M (R) ⊂ R.
b
a
d
M (0) = , M (∞) = , M −1 (∞) = − ∈ R.
d
c
c
Wir betrachten dabei nur den Fall c 6= 0 6= d und überlassen die anderen Fälle dem Leser. In
diesem Fall hat man
a b A := c dc ∈ R2×2
1 c
und M = MA . Wir können also a, b, c, d ∈ R annehmen. Wegen Im(M (i)) > 0 folgt aus 4.4.1
nun auch die letzte Behauptung.
In der Funktionentheorie beweist man, dass die biholomorphen Abbildungen eines Gebietes
genau die winkel- und orientierungstreuen (stetigen mit stetigen partiellen Ableitungen) Abbildungen des Gebietes sind (vgl. [9], IV, §2, speziell Satz 8 und Satz 9). Damit erhalten wir
folgenden Satz
4.4.3 Satz Die winkeltreuen Selbstabbildungen von H können beschrieben werden durch
z 7→
az + b
,
cz + d
oder z 7→
−az + b
, ad − bc = 1, a, b, c, d ∈ R.
−cz + d
Um Messen zu können, werden wir eine Metrik auf H einführen. Es wird sich herausstellen, dass
die in 4.4.3 angegebenen Abbildungen auch diese Metrik respektieren, also genau die Isometrien
bzgl. dieser Metrik darstellen. Wir bezeichnen die Menge aller Abbildungen wie in 4.4.3 daher
mit Iso(H).
4.4.4 Aufgabe Man zeige: Sind u, w ∈ H, so gibt es eine Möbiustransformatiom M ∈ Iso(H)
mit M (u), M (v) ∈ iR.
4.4.5 Definition Mit
Γ := {γ ∈ C([0, 1], H); ∃0 = t0 < t1 < · · · < tm = 1, γ|]ti ,ti+1 [ stetig differenzierbar}
bezeichnen wir die stückweise stetig differenzierbaren Wege in H.
4.4.6 Bemerkung
1. Die stückweise stetig differenzierbaren Wege Γ bilden einen R-Kegel
in V := C([0, 1], H).
4.4 Der hyperbolische Abstandsbegriff
65
2. Zu γ ∈ Γ wird durch −γ(t) := γ(1 − t) der zu γ inverse Weg −γ ∈ Γ definiert. Man hat
−γ(0) = γ(1) und −γ(1) = γ(0).
3. Zu γ, µ ∈ Γ mit γ(1) = µ(0) sei
(
γ(2t),
0 ≤ t ≤ 12 ,
µ ∗ γ : [0, 1] → H, t 7→
µ(2t − 1), 12 < t ≤ 1.
die Aneinanderhängung von γ und µ. Dann gilt µ ∗ γ ∈ Γ.
Die wohl grundlegende Idee, um das Halbebenenmodell nach Poincaré zu erhalten, ist wohl
folgende Definition.
4.4.7 Definition Es sei γ ∈ Γ. Dann heißt
Z1
L(γ) :=
|γ 0 (t)|
dt
Im(γ(t))
0
die hyperbolische Länge von γ.
Zunächst beachte man, dass das in der Definition gegebene Integral sicher existiert: Nach Voraussetzung an γ ist der Integrand zunächst eine stückweise stetig differenzierbare Funktion.
Da zudem γ([0, 1]) kompakt ist, existiert m := min(Im(γ([0, 1]))) > 0 und daher kann der
Integrand nach oben gegen |γ 0 (t)|m−1 abgeschätzt werden und dass dieses Integral existiert, ist
bekannt. Genauer erhält man folgende Beobachtung:
4.4.8 Bemerkung Für γ, µ ∈ Γ hat man:
1. Gilt m ≤ Im(γ([0, 1])) ≤ M , dann gilt
1
1
`(γ) ≤ L(γ) ≤ `(γ),
M
m
wobei `(γ) die euklidische Bogenlänge von γ bezeichnet.
2. L(−γ) = L(γ).
3. Im Falle γ(1) = µ(0) gilt L(µ ∗ γ) = L(µ) + L(γ).
Die erste Beobachtung ist, dass die hyperbolische Länge invariant unter Möbiustransformationen ist.
4.4.9 Satz Es seien M ∈ Iso(H) eine Möbiustransformation und γ ∈ Γ. Dann gilt L(M ◦ γ) =
L(γ).
66
Beweis
Nicht-Euklidische Geometrien
Es gilt
M ◦ γ(t) =
γ 0 (t)
aγ(t) + b
=⇒ (M ◦ γ)0 (t) =
.
cγ(t) + d)
(cγ(t) + d)2
Zusammen mit Lemma 4.4.1 ergibt sich
|γ 0 (t)|
|(M ◦ γ)0 (t)|
=
,
Im(M ◦ γ(t))
Im(γ(t))
woraus man die Behauptung erhält.
4.4.10 Definition Es seien z, w ∈ H. Dann heißt
d(z, w) := inf{L(γ); γ ∈ Γ mit γ(0) = z, γ(1) = w}
der hyperbolische Abstand von z und w.
4.4.11 Bemerkung Aus 4.4.9 folgt offenbar d(z, w) = d(M (z), M (w)) für jede Möbiustransformation aus Iso(H).
Offenbar gilt diese Invarianz auch für die Abbildung z 7→ −z̄, was zeigt, dass sowohl L als auch
d unter allen Abbildungen aus Iso(H) invariant sind.
4.4.12 Lemma Für z = iy, w = iv ∈ iR>0 mit y < v gilt d(z, w) = log yv , wobei log den
reellen natürlichen Logarithmus bezeichnet.
Beweis Es sei γ ∈ Γ mit γ(0) = z und γ(1) = w. Um Schreibarbeit zu sparen, nehmen wir
an, dass γ stetig differenzierbar ist (sonst muss man das Integral auf entsprechende Teilintervalle
aufspalten und dann summieren) und schreiben γ(t) = γ1 (t) + iγ2 (t). Dann gilt
Z1
L(γ) =
0
|γ 0 (t)|
dt =
Im(γ(t))
Z1 p
(γ10 (t))2 + (γ20 (t))2
dt ≥
γ2 (t)
Z1
0
γ20 (t)
v
dt = log
.
γ2 (t)
y
0
Da sich für µ(t) := iy + it(v − y) offenbar Gleichheit ergibt, erhält man die Behauptung.
4.4.13 Satz Der hyperbolische Abstand ist eine Metrik auf H.
Beweis Zunächst gilt offenbar d(z, z) = 0 für alle z ∈ H. Für z, w ∈ H mit z 6= w gibt es
aufgrund Aufgabe 4.4.4 ein M ∈ Iso(H) mit M (z), M (w) ∈ iR. Wegen Satz 4.4.9 und Lemma
4.4.12 gilt dann d(z, w) = d(M (z), M (w)) > 0.
Die Symmetrie folgt offenbar aus 4.4.8 2.
Für die Dreiecksungleichung und z, u, w ∈ H wähle man zu ε > 0 Wege γ ∈ Γ mit γ(0) = z,
γ(1) = u, µ(0) = u, µ(1) = w mit
L(γ) < d(z, u) + ε und L(µ) < d(u, w) + ε.
4.4 Der hyperbolische Abstandsbegriff
67
Dann gelten für ν := µ ∗ γ offenbar ν(0) = z, ν(1) = w und wegen Bemerkung 4.4.6 3.
L(ν) = L(γ) + L(µ). Dies zeigt
d(z, w) ≤ L(ν) < d(z, u) + d(u, w) + 2ε.
Da ε beliebig war, erhält man die Dreiecksungleichung.
Damit können wir den Satz 4.4.3 in der Tat dahin verallgemeinern, dass die dort angegebenen
Abbildungen genau die winkel- und längentreuen Selbstabbildungen von H sind.
Eine genauere Analyse des Beweises von Lemma 4.4.12 zeigt, dass in der hyperbolischen Geometrie die kürzeste Verbindung zweier Punkte auf der imaginären Achse in der Tat die (euklidische)
Strecke zwischen den Punkten ist. Dies trifft generell für Punkte mit gleichem Realteil zu, da
man diese durch eine horizontale Verschiebung auf die imaginäre Achse befördern kann. Für
Punkte z, w mit verschiedenem Realteil sei K(m, r) ein Kreis mit m ∈ R und z, w ∈ K(m, r).
Wir behaupten, dass dieser die kürzeste Verbindung von z und w beschreibt. Dazu genügt es
zu zeigen, dass es eine Möbiustransformation gibt, die diesen Kreis auf die Imaginäre Achse
abbildet, sodass der positive Halbkreis auf der positiven imaginäre Achse landet.
4.4.14 Lemma Es seien z, w ∈ H mit (ohne Einschränkung) Re(z) < Re(w). Weiter sei
K(m, r) der Kreis mit Mittelpunkt m ∈ R und z, w ∈ K(m, r). Ferner seien z ∗ , w∗ ∈ R∩K(m, r)
mit z ∗ = Re(z ∗ ) < Re(w∗ ) = w∗ . Dann gelten für
M (ζ) :=
ζ − z∗
.
w∗ − ζ
1. M ∈ Iso(H).
2. M (K(m; r)) = iR.
Beweis
1. Die erste Aussage ist eine direkte Folgerung aus 4.4.3.
2. Offenbar hat man M (z ∗ ) = 0, M (w∗ ) = ∞ und M (m + ir) = i (man beachte, dass
z ∗ = m − r und w∗ = m + r gelten). Damit folgt aus der Invarianz verallgemeinerter
Kreise unter Möbiustransformationen die Behauptung.
Aus dem letztem Lemma ergibt sich eine schöne Formel für den hyperbolischen Abstand zweier
Punkte:
4.4.15 Korollar Für z, w ∈ H gelten in der Notation von Lemma 4.4.14
d(z, w) = | log([z, w, z ∗ , w∗ ])|,
wobei [z, w, z ∗ , w∗ ] wieder das Doppelverhältnis bezeichnet.
68
Nicht-Euklidische Geometrien
Abbildung 4.5: Zur Doppelverhältnisformel 4.4.15
4.4.12
M (z) Beweis In der Bezeichnung von 4.4.14 hat man d(z, w) = d(M (z), M (w)) = | log M
|.
(w)
Einsetzen liefert
z − z ∗ w∗ − w z − z ∗ w − w∗ = log
= | log([z, w, z ∗ , w∗ ])|.
d(z, w) = log
·
·
w∗ − z w − z ∗ z − w∗ w − z ∗ Es gibt eine Reihe von weiteren Formeln für den hyperbolischen Abstand, von denen wir nur
einige vorstellen werden. Die Formel aus Korollar 4.4.15 notieren wir noch explizit. Dazu bezeichnen wir für z, w ∈ H mit Im(z) 6= Im(w) den reellen Mittelpunkt des Kreises durch z und
w mit m. Dieser hat den Radius |z − m| = |w − m|. Dann gilt
(z − m + |z − m|)(w − m − |z − m|) .
d(z, w) = log (4.2)
(z − m − |z − m|)(w − m + |z − m|) Eine der wohl wichtigsten Darstellungen liefert folgendes Lemma:
4.4.16 Lemma Es seien z, w ∈ H. Dann gilt:
1.
cosh(d(z, w)) = 1 +
2.
sinh(d(z, w)) =
|z − w|2
.
2Im(z)Im(w)
|z − w| · |z − w|
.
2Im(z)Im(w)
Beweis
1. Wir zeigen die Formel zunächst für z, w ∈ iR, also z = iy und w = iv mit y < v. Dann
gilt nach 4.4.12
v2 + y2
(v − y)2
|z − w|2
1 v y
cosh(d(x, y)) =
+
=
=1+
=1+
.
2 y v
2vy
2vy
2Im(z)Im(w)
4.5 Das Halbebenenmodell der hyperbolischen Ebene
69
Es genügt also nun zu zeigen, dass der Ausdruck auf der rechten Seite invariant unter
Möbiustransformationen ist. Dazu sei M (z) := az+b
mit OE ad−bc = 1 eine Möbiustranscz+d
formation. Dann rechnet man schnell
z−w
M (z) − M (w) =
(cz + d)(cw + d)
nach. Zusammen mit Lemma 4.4.1 erhält man nun
|z − w|2
|M (z) − M (w)|2
=
,
Im(M (z))Im(M (w))
Im(z)Im(w)
woraus die Behauptung folgt.
2. Diesen Nachweis überlassen wir dem Leser als Übung.
4.5
Das Halbebenenmodell der hyperbolischen Ebene
In diesem Abschnitt führen wir ein klassisches, auf Herni Poincaré zurückgehendes, Modell der
hyperbolischen Geometrie ein, das Halbebenenmodell. Dieses erfüllt alle Hilbertschen Axiome
bis auf das Parallelenaxiom, wie wir im Folgenden sehen werden.
4.5.1 Definition Unter dem Halbebenenmodell der hyperbolischen Ebene verstehen wir die
Menge H zusammen mit dem hyperbolischen Abstand d. Punkte in H sind die Elemente von
H, Geraden in H sind entweder (euklidische) Halbstrahlen x + iR>0 , x ∈ R, oder Halbkreise
K+ (m; r) := H ∩ K(m; r) mit reellem m ∈ R und positivem Radius r ∈ R>0 .
4.5.2 Bemerkung Aus den Sätzen 4.4.3 und 4.4.9 sowie Lemma 4.4.14 folgt, dass die winkeltreuen Isometrien von H gerade die in 4.4.3 angegebenen Abbildungen sind und dass die
Gruppe Iso(H) transitiv auf der Menge der Geraden in H operiert.
Im Folgenden werden wir uns überlegen, dass die hyperbolische Ebene H das Hilbertsche Axiomensystem außer dem Parallelenaxiom erfüllt. Für die Axiomengruppe der Inzidenz 2.2.1 ist
dies ziemlich offensichtlich. Exemplarisch zeigen wir wie im euklidischen Fall das erste Inzidenzaxiom:
4.5.3 Lemma Es seien A, B ∈ H mit A 6= B. Dann gibt es genau eine hyperbolische Gerade
g mit A, B ∈ g.
Beweis
Wir zeigen nur die Existenz, da die Eindeutigkeit ziemlich offensichtlich ist: Gilt
Re(A) = Re(B) =: x, so sei g := x + iR. Dann gilt offenbar A, B ∈ g.
Im Fall Re(A) 6= Re(B) schneidet die (euklidische) Mittelsenkrechte die reelle Achse. Dieser
Schnittpunkt sei M . Nach 3.4.8 gilt |A − M | = |B − M | =: r. Dann ist g := K(M ; r) ∩ H eine
hyperbolische Gerade, und es gilt A, B ∈ g.
70
Nicht-Euklidische Geometrien
Wir geben an dieser Stelle eine explizite Berechnung des zwei Punkte mit unterschiedlichem
Realteil verbindenden Halbkreis an (also der hyperbolischen Geraden durch diese Punkte), die
wir später noch öfter verwenden werden.
4.5.4 Lemma Es seien A, B ∈ H mit Re(A) 6= Re(B). Ferner sei K(M ; r) ein Kreis mit M ∈ R
und A, B ∈ K(M ; r). Dann gelten
M=
|B|2 − |A2 |
2(Re(B) − Re(A))
und
r=
|B − A| · |B − A|
.
2|Re(B) − Re(A)|
Beweis Wir zeigen zunächst die Aussage über den Mittelpunkt: Punkte x auf der euklidischen Mittelsenkrechte von A und B erfüllen die Gleichung
(x − A)(x̄ − A) = |x − A|2 = |x − B|2 = (x − B)(x̄ − B).
Ist x reell, so erhält man die Gleichung −x(A + A) + |A|2 = −x(B + B) + |B|2 , woraus man
direkt die behauptete Form für M erhält.
Wir schreiben nun A = a1 + ia2 und B = b1 + ib2 . Dann gilt
M=
b 1 + a1
b2 − a22
(b1 − a1 )2 + a22 − b22
b21 + b22 − a21 − a22
=
+ 2
=⇒ B − M =
+ ib2 .
2(b1 − a1 )
2
2(b1 − a1 )
2(b1 − a1 )
Dies zeigt
|B − M |2 =
=
=
=
=
(b1 − a1 )4 + (b22 − a22 )2 + 2(b1 − a1 )2 (a22 − b22 ) + 4b22 (b1 − a1 )2
4(b1 − a1 )2
(b1 − a1 )4 + 2(b1 − a1 )2 (a22 + b22 ) + (b22 − a22 )2
4(b1 − a1 )2
(b1 − a1 )4 + (b1 − a1 )2 (b2 + a2 )2 + (b1 − a1 )2 (b2 − a2 )2 + (b2 − a2 )2 (b2 + a2 )2
4(b1 − a1 )2
((b1 − a1 )2 + (b2 − a2 )2 )((b1 − a1 )2 + (b2 + a2 )2 )
4(b1 − a1 )2
|B − A|2 · |B − A|2
,
4(Re(B) − Re(A))2
woraus man die Behauptung abliest.
Für die Anordnungsaxiome definieren wir zunächst eine Zwischenbeziehung:
4.5.5 Definition Es seien A, B, C ∈ H drei Punkte einer Geraden. Wir sagen, dass C zwischen
A und B liegt, falls
d(A, B) = d(A, C) + d(C, B)
gilt.
Damit lassen sich auch Begriffe wie Strecke, Seite einer Geraden und Halbstrahl offensichtlich
analog zum euklidischen Fall definieren.
4.5 Das Halbebenenmodell der hyperbolischen Ebene
71
Wieder ist es eine einfache Übung, einzusehen, dass die Axiome aus 2.2.6 bei dieser Definition
erfüllt sind. Man beachte dazu, dass man immer ohne Einschränkung annehmen kann, dass
A = iy, B = iv, C = is ∈ iR>0 mit y < v gilt. Dann liegt C offenbar genau dann zwischen A
und B, falls y < s < v gilt. Mit dieser Beobachtung lässt sich auch das Axiom von Pasch mit
Hilfe eines Stetigkeitsarguments relativ einfach nachweisen.
4.5.6 Aufgabe Man zeige, dass für H das Axiom von Pasch gilt: Sind A, B, C ∈ H nicht alle
auf einer Gerade und schneidet die Gerade g die Strecke AB zwischen A und B und liegt C
nicht auf g, so schneidet g auch eine der beiden Strecken AC oder BC.
Kongruenz von Strecken definieren wir ebenfalls wie im Euklidischen:
4.5.7 Definition Es seien A, B, C, D ∈ H. Die Strecken AB und CD heißen kongruent, falls
d(A, B) = d(C, D) gilt.
Wir zeigen von der Axiomengruppe 2.2.12 lediglich das erste Axiom und überlassen die anderen
wieder dem Leser:
4.5.8 Lemma Es seien A, B ∈ H mit A 6= B sowie g die Gerade durch A und B. Weiter sei
A0 ein Punkt einer weiteren (nicht notwendig von g verschiedenen) Geraden g 0 , so gibt es auf
einer gegebenen Seite der Geraden g 0 von A0 einen Punkt B 0 , sodass d(A, B) = d(A0 , B 0 ) gilt.
Beweis Es sei d := d(A, B) > 0. Durch Anwenden einer geeigneten Möbiustransformation
können wir annehmen, dass g 0 = iR>0 und damit A0 = iy mit y ∈ R>0 gilt. Die beiden Seiten
von A0 entsprechen dann den Halbstrahlen h = {iv; v > y} bzw. h0 = {iv; 0 < v < y}.
0
0
0
Setzt man nun B±
:= iye±d , so liegen B+
und B−
auf verschiedenen Seiten von A0 und es gilt
0
0
d(A , B± ) = d. Damit folgt die Behauptung.
Winkelgrößen werden auf euklidische Winkelgrößen zurückgeführt:
4.5.9 Definition Es seien h, h0 zwei Halbstrahlen, die von einem gemeinsamen Punkt ausgehen. Die Winkelgröße des Winkels ∠(h, h0 ) zwischen diesen Halbstrahlen ist der euklidische
Winkelwert zwischen entsprechenden Tangentialvektoren an die Halbstrahlen.
Man kann diese Winkelgrößen in der Tat als Winkelgrößen zwischen euklidischen Halbstrahlen
interpretieren: Dazu nehmen wir an, dass A = iy, C = iv mit v > y sowie B ∈ H mit Re(B) > 0
gelte. Weiter sei M ∈ R der Mittelpunkt des Halbkreises durch A und B. Sei ferner O ∈ C der
Nullpunkt, so gilt für den Winkelwert α des Winkels ∠(AB
AC
−→, −
→) zwischen den hyperbolischen
Halbstrahlen AB
und
AC
−→
−→
α = ^AM O im euklidischen Sinne.
Mit dieser Beobachtung überzeugt man sich schnell davon, dass die Axiome 2.2.17 auch für die
hyperbolische Ebene erfüllt sind. Wir könnten das letzte Kongruenzaxiom, das Kongruenzaxiom
sws 2.2.19 an dieser Stelle beweisen, stellen diesen Beweis aber zurück, da wir es später aus
dem hyperbolischen Kosinussatz automatisch erhalten werden.
Der Beweis des archimedischen Axioms 2.2.27 folgt nach dem üblichen Muster:
72
Nicht-Euklidische Geometrien
4.5.10 Lemma Es seien AB und CD Strecken. Dann gibt es eine natürliche Zahl n, so dass
das n-malige Abtragen der Strecke CD vom Punkt A aus die Strecke AB enthält.
Beweis Wie üblich können wir annehmen, dass A = ia, B = ib ∈ iR mit b > a gelten. Es
sei d = d(C, D). Da der Abstandsbegriff additiv ist, genügt es zu zeigen, dass es ein n ∈ N gibt
mit
b
nd > d(A; B) = log
.
a
Dies ist aber offensichtlich richtig.
Auf den Nachweis des Vollständigkeitsaxioms 2.2.28 verzichten wir: Dieser lässt sich ähnlich
wie der Beweis des Satzes 3.1.21 im euklidischen Modell bewerkstelligen.
Damit haben wir gezeigt, dass in der Tat alle Hilbertschen Axiome außer dem Parallelenaxiom
erfüllt sind. Dieses gilt aber nicht! Vielmehr gibt es sogar unendlich viele Parallelen zu einer
gegebenen Gerade durch einen Punkt außerhalb dieser Geraden.
4.5.11
√ Beispiel Es seien g := iR und P := 1 + i. Ferner sei M := 1 + x für x ∈ R>0 und
r := 1 + x2 . Dann gilt P ∈ K(M ; r), aber K(M ; r) ∩ g = ∅.
Beweis
Offenbar gilt |P − M | =
√
1 + x2 , also P ∈ K(M ; r). Für z = iy ∈ g gilt
|z − M |2 = (1 + x)2 + y 2 > (1 + x)2 = 1 + x2 + 2x > 1 + x2 = r2 ,
also schneiden sich g und K(M ; r) nicht.
Man kann die hyperbolische Geometrie durchaus auch als Wahlthema in der gymnasialen Oberstufe in den Schulunterricht integrieren. Eine beispielhafte Durchführung dieser Idee findet sich
etwa in [3].
4.6
Hyperbolische Trigonometrie
In diesem Abschnitt untersuchen wir hyperbolische Dreiecke und werden für diese die hyperbolischen trigonometrischen Aussagen beweisen. Zunächst wählen wir wieder die üblichen Bezeichnungen:
4.6.1 Definition Sind A, B und C drei Punkte in H, die nicht auf einer Geraden liegen,
so heißt ABC ein hyperbolisches Dreieck mit Seitenlängen a = d(B, C), b = d(A, C) sowie
c = d(A, B). Die Innenwinkel des Dreieckes sind α = ∠(AB
AC
BA
−→, −
→), β = ∠(BC
−−→, −
→) sowie
γ = ∠(CA
CB
−→, −
−→).
In diesem Abschnitt werden wir uns mit Aussagen über hyperbolische Dreiecke auseinandersetzen. Die entscheidende Beweistechnik besteht dabei darin, dass man das Dreieck so legt, dass
zwei Punkte auf der imaginären Achse liegen und der dritte Punkt positiven Realteil besitzt.
Durch Anwenden einer Möbiustransformation und gegebenenfalls der Abbildung z 7→ −z ist
das immer erreichbar.
4.6 Hyperbolische Trigonometrie
73
Abbildung 4.6: Ein hyperbolisches Dreieck
4.6.2 Definition Ein hyperbolisches Dreieck ABC heißt in kanonischer Lage, falls A, C ∈ iR>0
mit Im(C) > Im(A) und Re(B) > 0 gelten.
Abbildung 4.7: Ein Dreieck in kanonischer Lage
4.6.3 Lemma Es sei ABC ein hyperbolisches Dreieck in kanonischer Lage. Ferner seien MAB
und MBC die Mittelpunkte der Kreise, auf denen die hyperbolischen Strecken AB bzw. BC
liegen. Für die Innenwinkelwerte α, β und γ, gelten dann
(
(
^AMAB O,
α ≤ π2 ,
π − ^CMBC O, γ ≥ π2
α=
γ
=
und β = ^MBC BMAB .
π − ^AMAB O, α > π2
^CMBC O,
γ < π2
74
Nicht-Euklidische Geometrien
−→
Beweis
Im Punkt A seien AC der Tangentialvektor der Seite AC sowie ~v der Tangentialvek−→
−→
−→
tor zur Seite AB. Dann gelten AC⊥MAB O und ~v ⊥MAB A, woraus man die Behauptung erhält.
Die anderen Aussagen sieht man ähnlich ein.
Als erstes Ergebnis zeigen wir damit den hyperbolischen Sinussatz.
4.6.4 Satz (Hyperbolischer Sinussatz) Es sei ABC ein hyperbolisches Dreieck in üblicher Bezeichnung. Dann gelten
sinh(b)
sinh(c)
sinh(a)
=
=
.
sin(α)
sin(β)
sin(γ)
Beweis Wir können ohne Einschränkung annehmen, dass ABC in kanonischer Lage ist, d.h.
es gelten A = iy, C = iv ∈ iR>0 , v > y sowie B = b1 + ib2 mit b1 > 0. Weiter seien MAB und
MBC die Mittelpunkte der Kreise durch A und B bzw. B und C. Dann gelten wegen Lemma
4.6.3 und des Euklidischen Sinussatzes 3.6.3
sin(α) =
Im(A)
|A − MAB |
und
sin(γ) =
Im(C)
.
|C − MBC |
Die Gleichung
sinh(c)
sinh(a)
=
sin(γ)
sin(α)
ist dann aufgrund von Lemma 4.4.16 äquivalent zu
|B − A| · |B − A| · |C − MBC |
|B − C| · |B − C| · |A − MAB |
=
.
2Im(A)Im(B)Im(C)
2Im(A)Im(B)Im(C)
Wegen Re(A) = Re(C) = 0 zeigt das Lemma 4.5.4 die Richtigkeit dieser letzten Gleichung. Die
anderen behaupteten Gleichungen ergeben sich durch zyklische Vertauschung.
Für Punkte auf der imaginären Achse gibt es eine einfache Möglichkeit, den hyperbolischen
Abstand zu einem Punkt außerhalb der imaginären Achse zu ermitteln:
4.6.5 Aufgabe Gelten A = iv ∈ iR>0 und B ∈ H, so hat man
|A|2 + |B|2
.
cosh(d(A, B)) =
2Im(A)Im(B)
Damit folgt auch direkt der hyperbolische Seitenkosinussatz
4.6.6 Satz (Hyperbolischer Seitenkosinussatz) Es sei ABC ein hyperbolisches Dreieck mit den
üblichen Bezeichnungen. Dann gilt
cosh(b) cosh(c) − cosh(a) = sinh(b) sinh(c) cos(α)
und entsprechend für zyklische Vertauschungen.
4.6 Hyperbolische Trigonometrie
75
Beweis
Wieder nehmen wir A = iy, C = iv ∈ iR mit v > y > 0 sowie Re(b) > 0 an. Ist
M ∈ R der Mittelpunkt des A und B verbindenden Halbkreises, so gilt wieder wegen Lemma
4.6.3 und des Euklidischen Kosinussatzes 3.6.1
|B|2 − |A|2
M
4.5.4
=
.
cos(α) =
|A − M |
|B − A| · |B − A|
Wegen 4.4.16 2. gelten
sinh(c) =
|B − A| · |B − A|
(Im(C))2 − (Im(A))2
und sinh(b) =
.
2Im(B)Im(A)
2Im(C)Im(A)
Mit Im(C) = |C| und Im(A) = |A| steht auf der rechten Seite der behaupteten Gleichung somit
der Ausdruck
(|C|2 − |A|2 )(|B|2 − |A|2 )
R :=
.
4(Im(A))2 Im(B)Im(C)
Für den Ausdruck auf der linken Seite erhält man unter Ausnutzung der Aufgabe 4.6.5
(|A|2 + |C|2 )(|B|2 | + |A|2 )
|B|2 + |C|2
−
4(Im(A))2 Im(B)Im(C)
2Im(B)Im(A)
2
2
2
2
2
2
|A| |B| + |C| |B| + |A| |C| + |A|4 − 2|A|2 |B|2 − 2|A|2 |C|2
,
=
4(Im(A))2 Im(B)Im(C)
cosh(b) cosh(c) − cosh(a) =
was ebenfalls R ergibt, woraus man die Behauptung abliest
4.6.7 Korollar (Hyperbolischer Pythagoras) Ist ABC ein rechtwinkliges hyperbolisches Dreieck mit α = π2 , so gilt
cosh(a) = cosh(b) cosh(c).
4.6.8 Korollar In der hyperbolischen Geometrie gilt der Kongruenzssatz sws“: Ein Dreieck
”
ist durch zwei Seiten und den eingeschlossenen Winkel festgelegt.
4.6.9 Korollar In der hyperbolischen Geometrie gilt der Basiswinkelsatz samt Umkehrung:
Ein Dreieck ist genau dann gleischschenklig, wenn es zwei gleiche Winkel besitzt.
4.6.10 Satz (Hyperbolischer Winkelkosinussatz) Es sei ABC ein hyperbolisches Dreieck in
den üblichen Bezeichnungen. Dann gelten
cos(β) = − cos(α) cos(γ) + sin(α) sin(γ) cosh(b)
und alle entsprechenden zyklischen Vertauschungen.
Beweis Wieder nehmen wir an, dass ABC in kanonischer Lage ist und bezeichnen die Mittelpunkte der zu AB bzw. BC gehörenden Kreise mit MAB und MAC und zugehörigen Radien rAB
bzw. rBC . Anwenden des euklidischen Kosinussatzes 3.6.1 auf das Dreieck MAB BMAC liefert
zunächst
2
2
2rAB rBC cos(β) = rAB
+ rBC
− |MAB − MBC |2 .
76
Nicht-Euklidische Geometrien
Die Aussage des Winkelkosinussatzes erweist sich mit Hilfe des Lemmas 4.6.3 und der Aufgabe
4.6.5 äquivalent zu
|A|2 + |C|2
MAB MBC Im(A) Im(C)
·
+
·
·
.
cos(β) =
rAB
rBC
rAB
rAB
2Im(A) · Im(C)
Somit genügt es
2
2
2
2
rAB
+ rBC
− MAB
− MAC
= |A|2 + |C|2
2
2
zu zeigen. Die Gleichung rAB
= MAB
+ |A|2 ist aber gerade der Satz des Pythagoras 3.6.2 im
rechtwinkligen Dreieck AOMAB und ebenso für das Dreieck COMBC .
4.6.11 Aufgabe Man untersuche, welche der Kongruenzsätze sss, www, sws, wsw, ssw und
wws in der hyperbolischen Geometrie gelten.
Wir wenden uns abschließend noch der Berechnung hyperbolischer Flächeninhalte zu.
4.6.12 Definition Es sei K ⊂ H eine messbare Teilmenge. Dann ist der hyperbolische Flächeninhalt FK von K definiert durch
Z
1
FK :=
d(x, y).
2
K y
4.6.13 Aufgabe
1. Es seien G ⊂ C ein Gebiet sowie f : G → C holomorph. Weiter bezeichne man mit fR : GR → R2 die durch Zerlegung in Real- und Imaginärteil definierte
zugehörige reelle Abbildung. Man zeige
det(fR0 (x, y)) = |f 0 (z)|2 , mit z = x + iy.
2. Man folgere für eine Möbiustransformation
M : H → H, z 7→
az + b
, a, b, c, d ∈ R, ad − bc = 1,
cz + d
die Identität
det(MR0 (x, y)) =
1
, mit z = x + iy.
|cz + d|4
4.6.14 Bemerkung Aus der Aufgabe 4.6.13 und dem Lemma 4.4.1 sowie der Substitutionsregel für mehrdimensionale Integrale ([25], 205.2) folgt, dass der hyperbolische Flächeninhalt
invariant unter Möbiustransformationen ist.
4.6.15 Satz Es sei ABC ein Dreieck. Dann gilt
FABC = π − α − β − γ.
Beweis Wegen Bemerkung 4.6.14 können wir annehmen, dass ABC in kanonischer Lage ist.
Weiter seien wieder K+ (MAB , rAB ) und K+ (MBC , rBC ) die A und B bzw. B und C verbindenden
Halbkreise. Wir beschränken uns auf den Fall 0 < MBC < MAC < Re(B) und überlassen die
4.7 Hyperbolische Parallelen und Abstände
77
(analog zu behandelnden) anderen Fälle dem Leser (dies entspricht gerade der in Abbildung
4.7 dargestellten Situation). Für z = x + iy mit x ∈ [0, Re(B)] gilt dann:
q
q
2
2
− (x − MAB )2 ≤ y ≤ rBC
− (x − MBC )2 =: o(x).
z ∈ ABC ⇐⇒ u(x) := rAB
Damit ist ABC ein durch u und o begrenzter Normalbereich bzgl. der x-Achse. Somit gilt (vgl.
[25], Satz 204.1)
Re(B)
Z
Zo(x)
1
FABC =
dy dx
y2
0
u(x)
Re(B)
Z
=
0
1
1
p
−p 2
2
rAB
− (x − MAB )2
rBC − (x − MBC )2
!
dx.
Die Aufgabe 4.6.17 zeigt nun
Re(B) − MAB
MAB
Re(B) − MBC
MBC
FABC = arcsin
+arcsin
−arcsin
−arcsin
.
rAB
rAB
rBC
rBC
Wendet man daraus das Lemma 4.6.3 an, so folgt aufgrund der betrachteten Situation
π
π
−α −
− (π − γ) = π − α − β − γ,
FABC = −β +
2
2
also die Behauptung.
4.6.16 Korollar Für hyperbolische Dreiecke ist die Winkelsumme immer kleiner als π.
4.6.17 Aufgabe Für a, b, z ∈ R>0 mit (x − b)2 ≤ a2 für 0 ≤ x ≤ z zeige man:
Zz
1
p
0
4.7
a2 − (x − b)2
= arcsin
z−b
a
b
+ arcsin
.
a
Hyperbolische Parallelen und Abstände
In diesem Abschnitt stellen wir einige Ergänzungen der hyperbolischen Geometrie zusammen,
die uns einige weitere Einsichten über diese Geometrie geben werden.
4.7.1 Bemerkung In der hyperbolischen Geometrie gelten der Nebenwinkel- und der Scheitelwinkelsatz, der Stufen- und Wechselwinkelsatz sind dagegen im Allgemeinen falsch!
4.7.2 Lemma Es seien g, h zwei hyperbolische Geraden und ` eine hyperbolische Gerade, die
g und h rechtwinklig schneidet. Dann sind g und h parallel.
78
Nicht-Euklidische Geometrien
Beweis Andernfalls seien S := g ∩ h, G := g ∩ ` und H := h ∩ `. Dann gilt im Dreieck SGH
offenbar σ + γ + η = σ + π ≥ π im Widerspruch zur Folgerung 4.6.16!
Die folgende Umkehrung des Lemmas 4.7.2 ist dagegen in der hyperbolischen Geometrie offenbar falsch: Sind g und h parallel, so schneidet jede Gerade, die g rechtwinklig schneidet, auch h
rechtwinklig. Interessanterweise braucht es bei parallelen hyperbolischen Geraden im Allgemeinen überhaupt keine gemeinsame rechtwinklige Gerade geben. Wir werden dieses Phänomen
im Folgenden etwas allgemeiner untersuchen.
4.7.3 Definition Zwei parallele hyperbolische Geraden g und h heißen verbindbar, wenn es
eine Gerade ` gibt, die g und h rechtwinklig schneidet.
Abbildung 4.8: Zwei verbindbare Geraden
4.7.4 Lemma Es sei g eine hyperbolische Gerade. Dann gibt es zu einem Punkt P ∈ H
unendlich viele zu g parallele Geraden durch P , die mit g verbindbar sind.
Beweis
Ohne Einschränkung können wir g = iR>0 und Re(P ) > 0 annehmen. Weiter sei
h := K(M ; r) ∩ H mit
√ M ∈ R>0 und r < M und P ∈ h. Dann sind offenbar g und h parallel.
Setzt man nun ρ := M 2 − r2 und ` := K(0; ρ) so schneidet ` sowohl g als auch h rechtwinklig:
Die erste Behauptung ist offenbar richtig. Setzt man nun
S :=
M 2 − r2
r √ 2
+i
M − r2 ,
M
M
so rechnet man schnell nach, dass S ∈ `, S ∈ h und S ∈ K( M2 ; M2 ) liegt. Aus den ersten beiden
Beobachtungen folgt, dass S = ` ∩ h gilt, aus der letzten Beobachtung folgt, dass S auf dem
(euklidischen) Thaleskreis über 0M liegt. Daher schneiden sich h und ` in S rechtwinklig. Eine genauere Analyse des letzten Beweises zeigt, dass es für die beiden Parallelen h1 :=
|P |2
K(M ; M ) ∩ H mit M := Re(P
und h2 := Re(P ) + iR>0 keine verbindende Gerade gibt. Dies
)
zeigt den Satz
4.7.5 Satz Zu einer hyperbolischen Geraden g und P ∈
/ g gibt es genau zwei nicht verbindbare parallele Geraden h1 und h2 mit P ∈ hi . Alle anderen zu g parallelen (also dann mit g
verbindbaren) Geraden durch P liegen zwischen h1 und h2 .
4.7 Hyperbolische Parallelen und Abstände
79
Abbildung 4.9: Randparallelen zu g durch P mit weiteren Parallelen
4.7.6 Definition Es sei g eine Gerade und P ∈
/ g. Dann nennt man die beiden zu g parallelen
aber nicht mit g verbindbaren Geraden durch P auch die Randparallelen von g bzgl P .
Wir gehen abschließend noch etwas auf Abstände ein.
4.7.7 Definition Es sei g eine hyperbolische Gerade und P ∈ H. Dann heißt
d(P ; g) := inf{d(P ; G); G ∈ g}
der Abstand von P zu g.
4.7.8 Beispiel Es seien g := iR>0 und h := 1 + iR>0 . Für H := 1 + iη ∈ h gilt dann
1.
p
1
2
d(g, H) = Arcosh
η +1 .
η
2. Ist L ∈ g mit d(L, H) = d(g, H), so schneidet LH die Gerade g rechtwinklig.
Beweis
Es sei is ∈ g. Dann gilt nach Aufgabe 4.6.5
s2 + 1 + η 2
cosh(d(is, H)) =
≥
2sη
p
1 + η2
,
η
√
a+b
wobei die Ungleichung gerade die Ungleichung
≥ ab zwischen arithmetischem und
2
geometrischen Mittel mit
s
1 + η2
und b :=
a :=
η
sη
p
ist und das Minimum daher genau für a = b, d.h. s = 1 + η 2 angenommen wird. Damit erhält
man beide Behauptungen.
80
Nicht-Euklidische Geometrien
Offenbar lässt sich die Aussage des Beispiels 4.7.8 etwa durch Anwendung einer geeigneten
Möbiustransformation auf beliebige Geraden übertragen. Dies zeigt, dass man den Abstand
wie in der euklidischen Situation immer durch das Fällen des Lotes messen kann.
Man erhält allerdings aus 4.7.8 auch einen weiteren fundamentalen Unterschied zur euklidischen
Geometrie:
4.7.9 Korollar Parallele Geraden haben in der hyperbolischen Geometrie keinen festen Abstand, in folgendem Sinne: Es seien g, h zwei parallele hyperbolische Geraden sowie P ∈ h.
Dann gibt es Q ∈ h mit d(P, g) 6= d(Q, g).
Natürlich läßt sich dennoch ein Abstand paralleler Geraden in sinnvoller Weise definieren:
4.7.10 Definition Es seien g und h parallele Geraden. Dann heißt
d(g, h) := inf{d(P, Q); P ∈ g, Q ∈ h}
der Abstand der beiden Geraden g und h.
Man beachte, dass dieser Abstand den Wert Null ergeben kann:
4.7.11 Aufgabe Man zeige: Sind g und h nicht verbindbar, dann gilt
d(g, h) = 0.
4.7.12 Bemerkung Es seien g und h durch ` verbindbar und P := ` ∩ g sowie Q := ` ∩ h.
Dann gilt d(g, h) = d(P, Q) und d(g, h) < d(P 0 , Q0 ) für alle Paare (P, Q) 6= (P 0 , Q0 ) ∈ g × h.
Damit beweist man schnell folgenden Satz
4.7.13 Satz Es seien g eine Gerade sowie P ∈
/ g. Dann gibt es genau eine Parallele h zu g
durch P mit maximalem Abstand. Für diese gilt d(g, h) = d(g, P ).
Beweis Ohne Einschränkung nehmen wir wieder g = iR>0 sowie Re(P ) > 0 an. Dann setze
)
|P |2
sowie r := Im(P
|P |. Dann sind offenbar g und h := K(M ; r) ∩ H
man ρ := |P |, M := Re(P
)
Re(P )
durch ` := K(0; ρ) ∩ H verbindbar. Weiter gilt ` ∩ h = P . Daher gilt d(g, h) = d(g, P ).
Für jede andere mit g verbindbare Gerade h0 mit P ∈ h0 gibt es ein P 6= S ∈ h0 mit
4.7.12
d(g, h0 ) = d(g, S) < d(g, P ) = d(g, h)
(vgl. den Beweis von 4.7.4), was die Behauptung zeigt.
Im Folgenden untersuchen wir noch die Existenz von Mittelsenkrechten.
4.7.14 Lemma Zu je zwei Punkten A, B ∈ H mit A 6= B gibt es eine hyperbolische Mittelsenkrechte, d.h. es gibt eine Gerade mAB , sodass für jedes P ∈ mAB gilt: d(A, P ) = d(B, P ).
4.7 Hyperbolische Parallelen und Abstände
81
Beweis √Wir können wieder ohne Einschränkung A = ia, B = ib ∈ iR>0 annehmen. Es sei
dann r := ab und M := 0. Dann setze man mAB := K+ (M, r). Wir behaupten, dass mAB die
gesuchte Mittelsenkrechte ist. Für einen Punkt P = x + iy ∈ mAB gilt dann x2 + y 2 = r2 = ab.
Daher hat man nach Aufgabe 4.6.5
cosh(d(A, P )) =
a+b
= cosh(d(B, P )),
2y
und daher die Behauptung.
Man beachte, dass gemäß des Beweises von 4.7.14 auch die hyperbolische Mittelsenkrechte von
A und B ihren Namen zu recht trägt: Sie ist die eindeutig bestimmte Gerade, die AB im
(hyperbolischen) Mittelpunkt von AB rechtwinklig schneidet.
4.7.15 Aufgabe Es seien A, B ∈ H mit Re(A) 6= Re(B) und Mittelsenkrechte mAB . Man
zeige:
a) Gilt Im(A) = Im(B), so ist mAB =
Re(A)+Re(B)
2
+ iR.
b) Für Im(A) 6= Im(B) sei h die Euklidische Gerade durch A und B sowie M := h ∩ R. Dann
gibt es ein r > 0, sodass mAB = K(M, r) ∩ H gilt.
4.7.16 Beispiel Es gibt hyperbolische Dreiecke, bei denen die Mittelsenkrechten der Seiten
keinen Schnittpunkt besitzen, die also keinen Umkreis“ haben.
”
Abbildung 4.10: Ein hyperbolisches Dreieck ohne Umkreis
Beweis
Es sei A := i, B := 6 + i und C := 4i. Dann gilt für die entsprechenden Mittelsenkrechten mAC = K(0; 2) ∩ H und mAB = 3 + iR>0 . Offenbar besitzen mAB und mAC keinen
Schnittpunkt.
Im letzten Beispiel war vom Umkreis eines Dreiecks die Rede. Eine naheliegende Frage ist, wie
hyperbolische Kreise aussehen.
4.7.17 Definition Ein hyperbolischer Kreis mit Radius r > 0 und Mittelpunkt M ∈ H ist die
Menge
Kh (M ; r) := {z ∈ H; d(z, M ) = r}.
82
Nicht-Euklidische Geometrien
4.7.18 Satz Hyperbolische Kreise sind euklidische Kreise.
Beweis Wir nehmen wieder M = im ∈ iR>0 und r > 0 an. Dann liegt z = x + iy ∈ H nach
Aufgabe 4.6.5 genau dann in Kh (M ; r), wenn
c := cosh(r) = cosh(d(z, M )) =
m2 + |z|2
, d.h. x2 + (y − mc)2 = m2 (c2 − 1)
2ym
gilt. Damit folgt in diesem Fall
Kh (M ; r) = K(im cosh(r); m sinh(r)).
Aus historischen Gründen gehen wir noch kurz auf Vierecke ein. Dabei sind Vierecke wieder
(im hyperbolischen Sinn!) konvexe Mengen mit genau vier Eckpunkten.
4.7.19 Definition Ein Viereck ABCD heißt Saccherisches Viereck, falls AD⊥AB, BC⊥AB
sowie d(A, D) = d(B, C) gelten.
Abbildung 4.11: Ein Saccherisches Viereck
4.7.20 Lemma In einem Saccherischen Viereck stimmen die Winkel bei C und D überein und
sind (beide) kleiner als π2 .
Beweis Anwenden des Kongruenzsatzes sws (4.6.8) auf die Dreiecke ABD und ABC zeigt
d(A, C) = d(B, D). Wendet man nun den Kongruenzsatz sss (vgl. Aufgabe 4.6.11 auf die
Dreiecke BCD und ACD, so folgt die Winkelgleichheit. Die Tatsache, dass beide kleiner als π2
sind, folgt aus dem Winkelsummensatz für hyperbolische Dreiecke.
4.7.21 Korollar In der hyperbolischen Geometrie existieren weder Rechtecke noch Quadrate.
Die letzte Aussage ist insbesondere von historischem Interesse. In den vielen Versuchen, das
Parallelenaxiom aus den anderen Axiomen abzuleiten, wurde oftmals die Existenz von Rechtecken bzw. Quadraten implizit angenommen. Wie wir anhand der Aussage 4.7.21 sehen, waren
alle diese Versuche zum Scheitern verurteilt.
4.8 Alternative Modelle für hyperbolische Geometrien
4.8
83
Alternative Modelle für hyperbolische Geometrien
Es gibt eine Reihe weiterer Modelle für die hyperbolische Geometrie, auf die wir in diesem
Abschnitt noch etwas eingehen wollen.
Die Grundlage unserer Betrachtungen bildet folgende Bemerkung:
4.8.1 Bemerkung Es sei f : H → G ⊂ C biholomorph. Dann lässt sich auf G vermöge f eine
hyperbolische Geometrie defininieren, sodass f eine Isometrie der Geometrien induziert.
Beweis Die Punkte der neuen hyperbolischen Geometrie sind die Elemente von G, Geraden
sind die Bilder hyperbolischer Geraden in H unter f . Eine hyperbolische Metrik läßt sich auf
G definieren durch
dG (z, w) := d(f −1 (z), f −1 (w)), z, w ∈ G,
wobei d die hyperbolische Metrik auf H bezeichnet. Es ist offensichtlich, dass sich dann alle
Aussagen in analoger Form auf G übertragen lassen.
Der Riemannsche Abbildungssatz besagt, dass jedes einfach zusammenhängendes Gebiet sich
damit zu einem Modell einer hyperbolischen Ebene machen lässt (mit Hilfe des Großen Riemannschen Abbildungssatzes lässt sich dies sogar auf einfach zusammenhängende Riemannsche
Flächen übertragen, vgl. [21]).
Das wohl neben der oberen Halbebene wichtigste Beispiel in diesem Zusammenhang ist die
Einheitskreisscheibe zusammen mit der Cayleytransformation aus 4.3.12. Wir werden die Formeln für die hyperbolische Länge und die entsprechende Metrik in dieser Situation explizit
formulieren.
4.8.2 Definition
1. Es sei γ : [0, 1] → E := {z ∈ C |z| < 1} ein stückweise stetig differenzierbarer Weg. Dann ist die hyperbolische Scheibenlänge von γ definiert durch
LE (γ) := L(H(γ)),
wobei L die hyperbolische Länge und H die Umkehrabbildung der Cayleytransformation
ist.
2. Die hyperbolische Scheibenmetrik ist definiert durch
dE (z, w) := d(H(z), H(w)),
z, w ∈ E,
wobei d die hyperbolische Metrik auf H ist.
4.8.3 Lemma Es sei z ∈ E und H die Umkehrabbildung der Cayleytransformation. Dann gilt
Im(H(z)) =
1 − |z|2
.
|1 − z|2
84
Nicht-Euklidische Geometrien
Beweis
Gemäß 4.3.12 gilt
H(z) = i
1 + z − z̄ − |z|2
1 − |z|2
2Im(z)
1+z
=i
=
i
−
,
2
2
1−z
|1 − z|
|1 − z|
|1 − z|2
woraus man die Behauptung abliest.
Damit können wir die entsprechenden Formeln für die hyperbolische Länge und den hyperbolischen Abstand im Modell des Einheitskreises angeben:
4.8.4 Satz
1. Für einen stetig differenzierbaren Weg γ : [0, 1] → E gilt
Z1
LE (γ) =
2|γ 0 (t)|
dt.
1 − |γ(t)|2
0
2. Für z, w ∈ E hat man
|z − w|2
.
cosh(dE (z, w)) = 1 +
(1 − |z|2 )(1 − |w|2 )
Beweis
1. Offenbar gilt mit der Umkehrung H der Cayleyabbildung
(H ◦ γ)0 (t) = i
2γ 0 (t)
.
(1 − γ(t))2
Nach Definition der Scheibenlänge folgt daher zusammen mit 4.8.3 die Behauptung.
2. Für z, w ∈ E rechnet man schnell
H(z) − H(w) = i
2(z − w)
(1 − z)(1 − w)
nach. Damit folgt die Behauptung aus Lemma 4.8.3 zusammen mit Lemma 4.4.16.
Ohne Beweise geben wir der Vollständigkeit halber noch zwei weitere Modelle für euklidische
Geometrien an. Für interessierte Leser verweisen wir auf [18] oder [29].
4.8.5 Beispiel
1. (Einschaliger Hyperboloid) Es sei
ϕ : R3 × R3 → R,
(x, y) = ((x1 , x2 , x3 ), (y1 , y2 , y3 ) 7→ x1 y1 + x2 y2 − x3 y3
das Minkowski-Produkt auf dem R3 . Weiter seien
H := {x = (x1 , x2 , x3 ) ∈ R3 ; x3 > 0, ϕ(x, x) = 1}
ein (einschaliger) Hyperboloid sowie dH (x, y) := Arcosh(ϕ(x, y)). Wählt man dann als
Punkte die Elemente von H und als Geraden die bzgl. dH kürzesten Wege, so liefert dies
eine zum Poincaré-Modell isometrische hyperbolische Geometrie.
4.8 Alternative Modelle für hyperbolische Geometrien
85
2. (Beltrami-Klein-Modell – Bierdeckelgeometrie) Man betrachte wieder die Einheitskreisscheibe E := {z ∈ C; |z| < 1}. Wählt man als Punkte die Elemente von E und als
Geraden die Sehnen, so erhält man ebenfalls eine (isometrische) hyperbolische Geometrie. Eine Metrik konstruiert man in diesem Fall wie folgt. Sind z, w ∈ E und s die
Sehne durch z, w, so seien z ∗ und w∗ die Schnittpunkte der Sehne mit ∂E (jeweils auf der
entsprechenden Seite); man setzt nun
1
z − z ∗ w − w∗ 1 ∗
∗ ·
.
dBK (z, w) := log([z, w, z , w ]) = log
2
2
z − w∗ w − z ∗ Eine Schwierigkeit in diesem Modell liegt in der Winkelmessung, die hier nicht euklidisch
erfolgt: Als Beispiel definieren wir Orthogonalität. Es sei s eine Sehne in E (die kein
Durchmesser ist) und P ∈ s sowie z ∗ , w∗ die Endpunkte von s. Der Schnittpunkt Ps der
Tangenten an ∂E in z ∗ und w∗ heißt der Pol von s. Dann ist die Sehne E ∩ P Ps die
Orthogonale zu s durch P .
Kapitel 5
Konstruierbarkeit
In diesem Kapitel kehren wir wieder in die euklidische Geometrie zurück und setzen uns ein
wenig mit Fragen nach Konstruierbarkeit von geometrischen Größen auseinander. Bereits in
der Antike beschäftigte man sich mit dem Problem, ob und wie gewisse Größen nur mit Zirkel
und Lineal konstruierbar sind. Wir werden im Folgenden uns mit dieser Problematik auseinandersetzen.
5.1
Konstruierbare Zahlen
Wir verwenden wieder das euklidische Modell E, welches auf dem R2 zusammen mit dem
Standardskalarprodukt basiert. Für unsere Herangehensweise identifizieren wir R2 ∼
= C vermöge
der kanonischen Identifikation (x; y) 7→ x + iy mit dem Körper C der komplexen Zahlen. Wir
definieren nun eine aufsteigende Familie von Teilmengen von C. Dazu sei K0 := {0; 1}. Weiter
sei wie üblich für a, b, c ∈ C mit b 6= c die Gerade durch b und c mit bc bezeichnet sowie mit
K(a; |b − c|) := {z ∈ C; |z − a| = |b − c|} der Kreis um a mit Radius |b − a|. Dann definieren
wir zu n ∈ N die Menge Kn+1 durch
oder
z ∈ a1 b1 ∩ a2 b2 , a1 b1 6= a2 b2
z ∈ C; ∃a1 , a2 , b1 , b2 , c1 , c2 ∈ Kn z ∈ a1 b1 ∩ K(a2 , |c2 − b2 |)
oder
z ∈ K(a1 , |c1 − b1 |) ∩ K(a2 , |c2 − b2 |), a1 6= a2
Offenbar gilt Kn ⊂ Kn+1 für alle n ∈ N.
5.1.1 Definition Die Menge
K :=
[
Kn ⊂ C
n∈N
heißt Menge der konstruierbaren Zahlen.
Wir wollen im Folgenden zeigen, dass K ein Körper ist. Dazu benötigen wir einige Vorüberlegungen.
5.1 Konstruierbare Zahlen
87
5.1.2 Lemma Es sei a ∈ K. Dann gelten auch a, Re(a), Im(a), |a| ∈ K. Umgekehrt folgt aus
x, y ∈ K ∩ R auch x + iy ∈ K.
Beweis
Ohne Einschränkung sei Re(a) 6= 0. Wegen {0; 1} = K0 ⊂ K folgt
K ⊃ K(0; |a − 0|) ∩ 01 = {±|a|}.
Damit erhält man auch {0, 2Re(a)} = K(a; |a|) ∩ 01 ⊂ K. Dies zeigt
a ∈ K(0; |a|) ∩ K(2Re(a); |a|) ⊂ K.
Weiter folgt Re(a) ∈ aa ∩ 01 ⊂ K. Die Konstruktion von Im(a) überlassen wir dem Leser.
Für die letzte Behauptung sei y 6= 0. Dann gelten zunächst {x − y, x + y} = 01 ∩ K(x, |y|) ⊂ K
sowie (speziell) 2y ∈ K(y, |y|) ∩ 01 ⊂ K. Damit sind auch die Schnittpunkte z, w = x ± iu von
K(x + y, 2|y|) und K(x − y, 2|y|) in K. Offenbar gilt dann x + iy ∈ K(x, |y|) ∩ zw ⊂ K.
5.1.3 Lemma Es seien a, b ∈ K. Dann gilt auch a ± b ∈ K.
Beweis Es gilt K(a; |0 − b|) ∩ K(b; |0 − a|) 3 a + b, woraus die Behauptung über die Summe
folgt. Die Differenz folgt aus dem ersten Teil und Lemma 5.1.2 zusammen mit der Beobachtung
−a ∈ K(0; |a|) ∩ 0a.
5.1.4 Lemma Für x, y ∈ R>0 ∩ K gelten auch x · y ∈ K sowie
1
x
∈ K.
Beweis Aufgrund Lemma 5.1.2 gelten 1 + iy, x + i ∈ K. Dann erhält man nach dem Strahlensatz x + xyi = 0(1 + iy) ∩ x(x + i). Wieder mit Lemma 5.1.2 folgt xy ∈ K.
Ebenso sieht man 1 + i x1 = 0(x + i) ∩ 1(1 + i).
5.1.5 Satz Die Menge K der konstruierbaren Zahlen ist ein Körper.
Beweis Es ist zu zeigen, dass mit a, b ∈ K auch a ± b, a · b ∈ K und im Fall a 6= 0 auch a1 ∈ K
gelten. Die erste Behauptung ist genau die Aussage von Lemma 5.1.3. Die Aussage über das
Produkt folgt aus den bisherigen Lemmas aufgrund der Definition des komplexen Produkts.
Für den Kehrwert erhält man die Behauptung aus der Beobachtung
1
a
= 2.
a
|a|
Speziell folgt aus dem letzten Satz, dass Q(i) ⊂ K gilt, Punkte mit rationalen Koordinaten also
in jedem Fall konstruierbar sind. Allerdings lassen sich etwas mehr Zahlen konstruieren:
5.1.6 Lemma Für a ∈ K und b ∈ C mit b2 = a gilt b ∈ K.
88
Konstruierbarkeit
p
Beweis Wir nehmen zunächst a ∈ C\R<0 an. In diesem Fall gilt gilt b ∈ 0(a+|a|)∩K(0; |a|)
(vgl. Aufgabe 5.1.7), daher kann man ohne Einschränkung a ∈ R>0 ∩ K annehmen. Dann sind
nach Lemma 5.1.2 die Zahlen ia und −i Elemente von K. Wegen Satz 5.1.5 ist m := 12 (ia−i) ∈ K
und mit Lemma 5.1.2 ist auch r := 21 | − i − ia| ∈ K. Es sei nun b0 der positive Schnittpunkt
von 01 mit K(m; r). Nach dem Satz des Thales 3.4.4 ist dann das Dreieck aus den Punkten −i,
b0 und ia rechtwinklig mit rechtem Winkel bei b0 . Der Höhensatz (Aufgabe 3.6.5) liefert nun
b0 2 = a, und nach Konstruktion gilt offenbar b0 ∈ K. Wegen b = ±b0 erhält man die Behauptung.
Den Fall a < 0 überlassen wir dem Leser.
5.1.7 Aufgabe Für a ∈ C \ R<0 und
p
|a|
(a + |a|)
b :=
|a + |a||
gilt b2 = a.
Zusätzlich zu Punkten mit rationalen Koordinaten enthält K also auch Punkte, die sich durch
sukzessives Wurzelziehen berechnen lassen. Wir wollen im Folgenden zeigen, dass dies in der
Tat alle sind.
5.2
Quadratwurzeltürme
Für den Nachweis, dass sich jedes Element aus K durch die üblichen Rechenarten und sukzessives Wurzelziehen aus einem Elemen von Q konstruieren läßt, brauchen wir ein wenig Erinnerung
an Algebra. Sind L, K ⊂ C Teilkörper von C, so heißt L eine Körpererweiterung L|K von K,
wenn K ⊂ L gilt. Offenbar läßt sich L dabei als K-Vektorraum auffassen. Ist die Dimension
von L als K-Vektorraum endlich, so sprechen wir von einer endlichen Körpererweiterung. Gilt
dimK (L) = 2, so heißt L quadratische Erweiterung von K. Ein Quadratwurzelturm L|K ist
eine Folge von Körpererweiterungen
K = L0 ⊂ L1 ⊂ L2 ⊂ · · · ⊂ Ls = L,
sodass jedes Li+1 quadratische Erweiterung von Li ist, d.h. dimLi (Li+1 ) = 2 für 0 ≤ i ≤ s − 1.
Weiter bezeichnen wir für eine Teilmenge M ⊂ C den kleinsten Teilkörper von C, der M enthält,
mit Q(M ). Jeder derartige Teilkörper enthält speziell den Körper Q der rationalen Zahlen. Für
n ∈ N sei weiter Qn := Q(Kn ) der kleinste Teilkörper von C, der Kn enthält, wobei Kn die zu
Beginn des Abschnitts 5.1 definierten Mengen bezeichnet.
5.2.1 Lemma Es gilt Kn = Kn .
Beweis
Für n = 0 ist die Behauptung klar. Für n > 0 folgt die Behauptung gemäß der
Definition von Kn mittels Induktion nach n.
5.2 Quadratwurzeltürme
89
5.2.2 Lemma Es sei x ∈ Qn+1 . Dann gilt x ∈ Qn oder es gibt zu Qn (x)|Qn einen Quadratwurzelturm.
Beweis
Dies überlassen wir dem Leser als Übungsaufgabe.
5.2.3 Satz Es sei x ∈ K. Dann gibt es einen Quadratwurzelturm
Q = L0 ⊂ L1 ⊂ · · · ⊂ Ls = Q(x).
S
Beweis Wegen K = Qn gibt es ein n ∈ N mit x ∈ Qn . Wir führen nun Induktion nach n.
Für n = 0 ist nichts zu zeigen. Andernfalls gibt es zu Qn−1 (x)|Qn−1 nach Lemma 5.2.2 Qn (x)
einen Quadratwurzelturm. Um Schreibarbeit zu sparen, nehmen wir an, dass Qn−1 (x)|Qn−1 eine
quadratische Erweiterung ist. Es gibt also ein quadratisches Polynom p(T ) := T 2 + aT + b mit
p(x) = 0 und a, b ∈ Qn−1 . Anwenden der Induktionsvoraussetzung auf a und b liefert Quadratwurzeltürme für a und b. Setzt man diese zusammen, so erhält man einen Quadratwurzelturm
für Q(a, b) und damit auch einen für Q(x).
5.2.4 Beispiel
1. Das klassische Problem der Würfelverdopplung ist nicht lösbar.
2. Das klassische Problem der Winkeldrittelung ist nicht lösbar.
Beweis
1. Hier wäre die Zahl
nicht möglich.
√
√
3
2 zu kontruieren. Wegen [Q( 3 2) : Q] = 3 ist dies nach Satz 5.2.3
√
2. Wir betrachten z := 12 + i 23 ∈ K(0, 1). Wegen Lemma 5.1.6 gilt z ∈ K. Wäre der Winkel
1
∠(01
0z ) drittelbar, dann gäbe es ein w ∈ K mit ∠(01
0z ). Ohne Ein→
− ,→
−
→
− ,→
−
→
− , 0w
−
→) = 3 ∠(01
schränkung können wir w ∈ K(0, 1) annehmen (sonst betrachte 0w ∩ K(0, 1)). Schreiben
wir w = x + iy, dann gilt w3 = z, also
1
= x3 − 3xy 2 = 4x3 − 3x,
2
somit gilt [Q(x) : Q] = 3. Wieder nach Satz 5.2.3 ist x nicht konstruierbar. Dann kann
aber auch w nach Lemma 5.1.2 nicht konstruierbar sein.
Teil II
Geometrie in höheren Dimensionen
Kapitel 6
Polytope
In diesem Kapitel beschäftigen uns wir mit der euklidischen Geometrie von Polytopen in höherdimensionalen Räumen. Wir beschränken uns dabei auf das Studium konvexer Körper, d.h. Teilmengen des Rn , die jeweils auch die Verbindungsstrecke zweier Punkte der Mengen enthalten.
Wir setzen dabei Begriffe wie metrischer oder normierter Raum voraus.
6.1
Konvexität
Für die folgendenen Untersuchungen sei h·, ·i ein euklidisches Skalarprodukt auf dem Rn , d.h.
eine symmetrische, positiv definite Bilinearform. Bekanntlich wird damit für v ∈ Rn durch
p
kvk := hv, vi
eine Norm auf dem Rn definiert, die Rn zusammen mit dem gewählten Skalarprodukt zu einem
normierten Raum macht. Für x, y ∈ Rn liefert d(x, y) := kx − yk eine Metrik auf Rn , sodass
man einen metrischen Raum erhält. Weiter nennen wir die Elemente von Rn Punkte“. Unter
”
einer Gerade des Rn verstehen wir Mengen der Form
Γ := A + R · v, A, v ∈ Rn .
Sind A, B ∈ Rn zwei Punkte aus dem Rn , so ist
[A, B] := {A + t(B − A); t ∈ [0, 1]}
die abgeschlossene Strecke zwischen A und B. Offenbar ist diese eine Teilmenge der eindeutig
bestimmten Geraden durch A und B.
6.1.1 Definition Ist u ∈ Rn \ {0} und e ∈ R so heißt die Menge
Hu=e := {x ∈ Rn ; hu, xi = e}
eine Hyperebene in Rn . Die beiden Mengen
Hu≥e := {x ∈ Rn ; hu, xi ≥ e} sowie Hu≤e := {x ∈ Rn ; hu, xi ≤ e}
92
Polytope
heißen die durch die Hyperebene Hu=e definierten (abgeschlossenen) Halbräume von Rn . Oftmals betrachtet man auch offene Halbräume und definiert diese dann sinngemäß.
Wir merken an, dass für ein festes u ∈ Rn die Abbildung ϕu : Rn → R, x 7→ hu, xi offensichtlich
eine Linearform auf dem Rn ist. Damit erhalten wir durch u 7→ ϕu eine expliziten Isomorphismus
des Rn mit seinem Dualraum (Rn )∗ . In diesem Sinne ist die Hyperebene Hu=e nichts anderes als
das Urbild von e unter ϕu , d.h. Hu=e = ϕ−1
u (e). Wie in der Beschreibung der Hyperebene werden
n
wir oft nicht zwischen R und seinem Dualraum bzw. zwischen u und ϕu unterscheiden, d.h.
wenn wir von der Linearform u ∈ Rn sprechen, meinen wir die mit Hilfe des Skalarproduktes
definierte Abbildung ϕu .
6.1.2 Definition Eine Teilmenge K ⊂ Rn heißt konvex, wenn für alle A, B ∈ K auch deren
Verbindungsstrecke [A, B] ⊂ Rn ganz in K liegt.
Aus konvexen Mengen lassen sich weitere konvexe Mengen konstruieren:
6.1.3 Bemerkung Sind Ki , i ∈ I, konvexe Teilmengen von Rn und s ∈ R≥0 , dann gelten:
1. Ki1 + Ki2 := {x + y; x ∈ Ki1 , y ∈ Ki2 } ist konvex;
2. sKi := {sx; x ∈ Ki } ist konvex.
T
3. i∈I Ki ist konvex.
6.1.4 Aufgabe Man zeige Bemerkung 6.1.3.
6.1.5 Beispiel
1. Hyperebenen (allgemeiner affine Unterräume) und Halbräume sind konvexe Mengen.
2. Kugeln K(M ; r) := {X ∈ Rn ; kX − M k = r} mit M ∈ Rn und r > 0 sind konvex.
Die dritte Aussage der Bemerkung 6.1.3 erlaubt es, zu jeder Menge eine kleinste sie enthaltende
konvexe Menge zu konstruieren:
6.1.6 Definition Ist M ⊂ Rn eine beliebige Teilmenge, so heißt der Durchschnitt aller M
enthaltenden konvexen Mengen
\
KM := conv(M ) :=
K
M ⊂K konvex
die konvexe Hülle von M .
Von besonderem Interesse sind für uns kompakte konvexe Mengen. Das folgendene Lemma kann
man als einen Spezialfall des berühmten Satzes von Hahn-Banach auffassen:
6.1.7 Lemma Es sei K ⊂ Rn kompakt und konvex, weiter sei P ein Punkt mit P ∈
/ K. Dann
n
existiert ein u ∈ R sowie ein e ∈ R mit
hu, P i < e < hu, Ki := {hu, xi; x ∈ K}.
6.2 Polytope
93
Man sagt dabei auch, dass die Hyperebene Hu=e := {x ∈ Rn ; hu, xi = e} den Punkt P und die
konvexe Menge K trennt.
Beweis
Die Abbildung
Rn → R, x 7→ ||x − P ||2
ist stetig, nimmt also auf der kompakten Menge K ihr Minimum, etwa in W , an. Wir setzen
u := W − P und e := 21 (||W ||2 − ||P ||2 ). Es sei nun y ∈ K. Dann besitzt die quadratische
Funktion
f (t) := kty + (1 − t)W − P k2
in [0, 1] ihr Minimum in Null. Dies zeigt aber
0 ≤ f 0 (t) = 2hy − W, ty + (1 − t)W − P i.
Speziell erhält man 0 ≤ f 0 (0) = 2hy − W, W − P i, also
1
hu, yi ≥ hu, W i = kW 2 k − hP, W i = e + kW − P k2 > e.
2
Andererseits hat man
1
hu, P i = hW, P i − kP k2 = e − kW − P k2 < e,
2
was schließlich die Behauptung liefert.
6.1.8 Aufgabe
1. Man zeige, dass man in 6.1.7 die Voraussetzung, dass K kompakt ist,
durch die Abgeschlossenheit von K ersetzen kann.
2. Man zeige, dass man das e aus 6.1.7 immer als −1 oder 1 wählen kann.
Mit Hilfe des Lemmas 6.1.7 erhält man eine weitere Möglichkeit, konvexe Mengen zu beschreiben.
6.1.9 Satz Ist K ⊂ Rn kompakt und konvex, so stimmt K mit dem Durchschnitt aller K
enthaltenden Halbräume überein.
Beweis
Offenbar ist K im Durchschnitt aller K enthaltenden Teilräume enthalten. Angenommen, dieser Schnitt ist echt größer als K. Dann gibt es ein x ∈
/ K, welches ebenfalls in
diesem Schnitt enthalten ist. Nach Lemma 6.1.7 gibt es dann aber einen Halbraum, der K
enthält, aber x nicht. Daher kann x nicht im Durchschnitt aller K enthaltenden Halbräume
liegen.
6.2
Polytope
In diesem Abschnitt definieren wir Polytope und betrachten einige einfache Beispiele. In gewissem Sinne sind Polytope konvexe Mengen, welche einer speziellen Endlichkeitsbedingung
unterliegen.
94
Polytope
6.2.1 Definition Eine kompakte Teilmenge P des Rn heißt Polytop, wenn es die konvexe Hülle
endlich vieler Punkte des Rn ist:
A1 , . . . , An ∈ Rn .
P = conv(A1 , . . . An ),
Man beachte, dass die vorgegebenen Punkte nicht notwendigerweise eine minimale Anzahl
darstellen müssen; es können durchaus Redundanzen auftreten. Im Allgemeinen ist es eine
schwierige Aufgabe, zu einer gegebenen Menge von Punkten eine minimale Teilmenge zu finden,
die die gleiche konvexe Hülle besitzt (Simplex-Verfahren, Fourier-Motzkin-Elimination). In Satz
6.2.11 geben wir ein Ergebnis an, das in diese Richtung geht. Wir vermerken, dass auch die
leere Menge als konvexe Hülle von keinem Punkt ein Polytop ist. Ausgehend von den gegebenen
Punkten läßt sich auch eine explizitere Darstellung des zugehörigen Polytops angeben:
6.2.2 Lemma Für A1 , . . . , An ∈ Rn gilt
( n
)
n
X
X
P := conv(A1 , . . . An ) =
ti Ai ;
ti = 1, ti ≥ 0, 1 ≤ i ≤ n .
i=1
i=1
P
P
Beweis Wir setzen M := { ni=1 ti Ai ; ni=1 ti = 1, ti ≥ 0}. Dann sieht man induktiv schnell,
dass M sicherlich konvex ist. Da offenbar Aj ∈ M für 1 ≤ j ≤ n gilt, folgt P ⊂ M . Da mit
den Aj auch alle Konvexkombinationen derselben in P liegen, erhält man auch die umgekehrte
Inklusion.
6.2.3 Definition Es sei P ⊂ Rn ein Polytop und H := Hu=e eine Hyperebene mit P ⊂ Hu≥e .
Dann heißt der Durchschnitt F := H ∩ P eine Seite von P . Im Fall von F = ∅ oder F = P
(u = 0 und e = 0, was wir hier zulassen) spricht man von uneigentlichen Seiten, andernfalls
von eigentlichen Seiten. Ist F Seite von P , so schreibt man F P .
6.2.4 Lemma Es sei P = conv(A1 , . . . , An ) ein Polytop und F P eine Seite von P , so gilt
F = conv({Ai ; Ai ∈ F }). Insbesondere ist F selbst ein Polytop.
Beweis Es sei F = P ∩ H mit H := Hu=e . Ohne Einschränkung (Umnummerieren!) gelte
Ai ∈ H ⇐⇒ 1 ≤ i ≤ m. Wir behaupten F = conv(A1 , . . . , Am ):
Da F als Schnitt konvexer Mengen selbst konvex ist und A1 , . . . , Am enthält, gilt in jedem Fall
F ⊃ conv(A1 , . . . , Am ).
Für die umgekehrte Inklusion sei x ∈ F . Wegen F ⊂ P besitzt x gemäß Lemma 6.2.2 eine
Darstellung
n
n
X
X
x=
ti Ai , ti ≥ 0,
ti = 1.
i=1
i=1
Wegen F ⊂ H ergibt die Auswertung mit u
e = hu, xi =
m
X
i=1
ti e +
n
X
i=m+1
ti hu, Ai i.
6.2 Polytope
95
Angenommen, für m + 1 ≤ j ≤ n ist ein tj größer Null, so erhält man aufgrund von P ⊂ Hu≥e
und Aj ∈
/H
m
n
X
X
e = hu, xi >
ti e +
ti e = e,
i=1
i=m+1
was nicht sein kann. Daher gilt tj = 0 für alle m + 1 ≤ j ≤ n und somit
x=
m
X
ti Ai ∈ conv(A1 , . . . , Am ).
i=1
6.2.5 Korollar Ein Polytop besitzt nur endlich viele Seiten.
Ist C ⊂ Rn nicht leer, so bezeichnet man den kleinsten affinen Teilraum, der C enthält,
mit aff(C). Die Dimension von C ist dann die Dimension dieses Teilraums, d.h. dim(C) :=
dim(aff(C)). Die Dimension der leeren Menge setzt man in diesem Zusammenhang als −1, also
dim(∅) := −1.
Weiter nennen wir Punkte v1 , . . . , vk ∈ Rn , k ≥ 2 affin unabhängig, falls die k − 1 Vektoren
v1 − vi , 2 ≤ i ≤ k linear unabhängig sind. Beispielweise sind zwei verschiedene Elemente des
Rn immer affin unabhängig.
6.2.6 Bemerkung Die Punkte v1 , . . . , vk ∈ Rn sind genau dann affin linear unabhängig, falls
das System
k
k
X
X
si vi = 0,
si = 0, si ∈ R,
i=1
i=1
nur die triviale Lösung besitzt.
Beweis
⇒“: Andernfalls sei si , i = 1, . . . , k eine nicht triviale Lösung dieses Systems. Damit
”
erhält man die Gleichung
k
X
0=
si (v1 − vi ),
i=2
in der mindestens ein si , i ≥ 2 ungleich Null ist. Damit sind die Vektoren v1 , v2 , . . . , vn affin
abhängig im Widerspruch zur Voraussetzung.
⇐“: Es sei eine Darstellung
”
k
X
si (v1 − vi ) = 0
i=2
gegeben. Mit s1 := −
k
X
si erhält man daraus durch Umstellen die Gleichung
i=2
0=
k
X
i=1
!
si
v1 =
k
X
i=1
si vi ,
96
Polytope
in der nach Voraussetzung alle si = 0 sind, woraus man die Behauptung erhält.
Für Dimensionsaussagen benötigen wir noch folgendes Lemma:
6.2.7 Lemma Es sei A ⊂ Rn ein affiner Unterraum der Dimension d mit 0 ∈
/ A sowie e 6= 0.
Dann ist die Menge
A∗ := {u ∈ Rn ; hu, Ai = e}
ein affiner Unterraum der Dimension n − 1 − d.
Beweis Nur die Dimensionsaussage ist interessant. Wir betrachten den Raum U := lin(A ×
{1}) ⊂ Rn × R =: Rn+1 . Mit U ⊥ sei dessen orthogonales Komplement bezeichnet. Dann ist die
Abbildung
−u
, 1)
A∗ → U ⊥ ∩ (Rn × {1}), u 7→ (
e
bijektiv. Wegen dim U ⊥ = n + 1 − (dim(A) + 1) = n − d erhält man die Behauptung.
6.2.8 Definition Ein Polytop P heißt ein Simplex, wenn es Punkte A1 , . . . , Adim(P )+1 gibt mit
P = conv(A1 , . . . , Adim(P )+1 ), d.h. die Punkte A1 , . . . , Adim(P )+1 sind affin unabhängig.
Man nennt ein Polytop simplizial, wenn seine eigentlichen Seiten Simplizes sind.
6.2.9 Beispiel
1. Das Polytop P := conv(0, e1 , . . . , en ) ⊂ Rn heißt Standardsimplex.
2. Ist P ⊂ Rn ein Polytop mit dim(p) = n, so heißt
ΠP := conv(P × {0}, en+1 ) ⊂ Rn × R = Rn+1
Pyramide über P . Ist P ein Simplex, so ist auch ΠP ein Simplex.
3. Ist P ⊂ Rn volldimensional und enthält P den Nullpunkt als inneren Punkt, so heißt
∆P := conv(P × {0}, ±en+1 ) ⊂ Rn × R = Rn+1
Doppelpyramide über P . Ist P simplizial, so ist auch ∆P simplizial.
4. Der Würfel C := conv({(a1 , a2 , a3 ); ai = ±1, 1 ≤ i ≤ 3} ist nicht simplizial. Allgemeiner
bezeichnet man zu einem Polytop P ⊂ Rn der Dimension n − 1 und einem Vektor v ∈ Rn
die Menge
P Pv := conv(P, P + v)
ein Prisma über P , falls dim(P Pv ) = n gilt.
6.2.10 Definition Es sei P ⊂ Rn ein volldimensionales Polytop. Die Seiten von P der Dimension 0 heißen Ecken, die eindimensionalen Seiten Kanten und die (n − 1)-dimensionalen
Seiten Facetten. Die Anzahl der j-dimensionalen Seiten wird mit fj (P ) bezeichnet. Der Vektor
fP := (f0 (P ), . . . , fn−1 (P )) wird auch als f -Vektor des Polytops P bezeichnet.
Anschaulich ist folgende Aussage einleuchtend:
6.2 Polytope
97
6.2.11 Satz (Satz von Krein-Milman) Ist P ein Polytop, so gilt
P = conv(v; v Ecke von P ).
Beweis Die Inklusion ⊃“ ist offensichtlich richtig. Umgekehrt genügt es für eine Darstellung
”
P = conv(w1 , . . . , wn ) und w1 ∈
/ conv(w2 , . . . , wn ) =: P 0 zu zeigen, dass w1 eine Ecke von P ist.
Nach Lemma 6.1.7 gibt es u ∈ Rn und e ∈ R mit
hu, w1 i < e < hu, P 0 i.
Wir setzen f := hu, w1 i. Dann gilt offenbar
P ⊂ Hu≥f und w1 ∈ Hu=f . Für x ∈ P gibt es nach
Pn
Lemma 6.2.2 eine Darstellung x = i=1 ti wi mit ti ≥ 0. Dann gilt offenbar
f = hu, xi ⇐⇒ tj = 0 für j > 1,
also Hu=f ∩ K = w1 .
Eine aktuelle Forschungsfrage besteht in der Frage, welche Vektoren als f -Vektoren eines Polytops auftreten können. Für simpliziale Polytope wurde das von Stanley erst 1980 vollständig
gelöst (vgl. [38]). Im Fall nicht simplizialer Polytope weiß man relativ wenig. Ein Ergebnis
in diese Richtung ist die Eulersche Polyederformel 6.3.8, der wir uns später noch zuwenden
werden.
6.2.12 Aufgabe Es sei P ein (n − 1)-dimensionales Polytop in Rn . Man zeige
1. Für eine Pyramide ΠP über P gilt
fj (ΠP ) = fj (P ) + fj−1 (P ), 1 ≤ j ≤ n − 1.
2. Für ein Prisma P Pv über P hat man
f0 (P Pv ) = 2f0 (P ) und fj (P Pv ) = 2fj (P ) + fj−1 (P ), 1 ≤ j ≤ n − 1.
Wir diskutieren noch ein weiteres wichtiges Beispiel, nämlich die sogenannten zyklischen Polytope:
6.2.13 Definition Die Abbildung
µ : R → Rn ,
t 7→ (t, t2 , . . . , tn ),
heißt Moment-Abbildung. Für k > n und t1 , . . . , tk ∈ R paarweise verschieden heißt das Polytop
C(k, n) := conv(µ(t1 ), . . . , µ(tk ))
ein zyklisches Polytop.
6.2.14 Satz Es sei n ≥ 2 und C(k, n) = conv(µ(t1 ), . . . , µ(tk )) ein zyklisches Polytop. Dann
gelten:
98
Polytope
1. C(k; n) ist simplizial.
2. Jedes µ(ti ), 1 ≤ i ≤ k ist eine Ecke von C(K; n).
Beweis
1. Es genügt zu zeigen, dass je n+1 der Punkte µ(ti ), 1 ≤ i ≤ k affin linear unabhängig sind.
Dazu verwenden wir die Vandermonde-Deteminante und zeigen dies ohne Einschränkung
für die ersten n + 1 Punkte:
1 t1
t21 . . . tn1
1 t2
Y
t22 . . . tn2
=
(tj − ti ) 6= 0.
det ..
..
..
..
1≤i<j≤n+1
.
.
.
.
1 tn+1 t2n+1 . . . tnn+1
2. Ohne Einschränkung sei i = 1 und das gewählte Skalarprodukt das Standardskalarprodukt auf dem Rn , ferner setzen wir v := µ(t1 ), u := (−2t1 , 1, 0, . . . , 0) ∈ Rn und e := −t21 .
Dann gelten
hu, µ(t1 )i = −t21 = e und hu, µ(tj )i = −2t1 tj + t2j > −t21 = e.
Daher ist Hu=e eine Stützhyperebene für v.
Im Folgenden geben wir noch eine alternative Beschreibung von Polytopen, die in vielen Anwendungen, etwa der linearen Optimierung, eine wichtige Rolle spielt.
6.2.15 Definition Es sei M ⊂ Rn . Ein x ∈ M heißt Endpunkt von M , falls für alle abgeschlossenen Strecken [A, B] ⊂ M mit x ∈ [A, B] entweder x = A oder x = B gilt.
Ist M ein Polytop, so stimmen die Endpunkte von M gerade mit den Ecken von M überein:
6.2.16 Bemerkung Ist P ein Polytop, so ist x ∈ P genau dann ein Endpunkt von P , falls x
eine Ecke von P ist.
Beweis Die Richtung ⇐“ ist klar. Umgekehrt sei x ∈ P Endpunkt von P . Dann zeigen wir,
”
dass P \ {x} konvex ist, woraus die Behauptung aus dem Satz von Krein-Milman folgt. Wäre
P \ {x} nicht konvex, dann gäbe es A, B ∈ P mit x ∈ [A, B] ⊂ P und x 6= A sowie x 6= B im
Widerspruch dazu, dazu x Endpunkt von P ist.
Unbeschränkte oder offene Mengen brauchen offenbar keine Endpunkte zu besitzen. Im Falle
kompakter Mengen existieren immer Endpunkte:
6.2.17 Lemma Sind K ⊂ Rn kompakt und x ∈ K mit kxk maximal, dann ist x Endpunkt
von K.
6.2 Polytope
Beweis
99
Es sei x ∈ [A, B] ⊂ K, etwa x = tA + (1 − t)B, 0 ≤ t ≤ 1 und A 6= B. Dann gilt
kxk2 = t2 kAk2 + 2t(1 − t)hA, Bi + (1 − t)2 kBk2 .
(6.1)
Die Ungleichung von Cauchy-Schwartz besagt hA, Bi ≤ kAk · kBk, wobei hier Gleichheit genau
dann gilt, wenn A = rB mit r > 0 ist. Man erhält somit aus (6.1) die Abschätzung
kxk2 ≤ t2 kAk2 +2t(1−t)kAk·kBk+(1−t)2 kBk2 ≤ t2 kxk2 +2t(1−t)kxk·kxk+(1−t)2 kxk2 = kxk2 ,
d.h. alle Ungleichheitszeichen sind in Wahrheit Gleichheitszeichen. Dies zeigt entweder t = 0, 1
oder es gilt sowohl kxk = kAk = kBk als auch hA, Bi = kAk · kBk, also A = rB, r > 0. Diese
beiden Gleichheiten können aber nur im Fall A = B erfüllt sein, was wir ausgeschlossen hatten.
Daher erhält man t = 0 oder t = 1, d.h. x = A oder x = B, und x ist Endpunkt von K.
6.2.18 Definition Ein endlicher Schnitt von Halbräumen heißt Polyeder, d.h. P ist genau
dann Polyeder, wenn ui ∈ Rn , ei ∈ R, 1 ≤ i ≤ m existieren mit
P =
m
\
Hui ≥ei .
i=1
Wir wollen zeigen, dass Polytope genau die beschränkten Polyeder sind. Wir zeigen zunächst
die eine Richtung:
6.2.19 Satz Jeder beschränkte Polyeder ist ein Polytop.
Beweis
Es sei P =
Tm
i=1
Hui ≥ei ⊂ Rn . Wir machen Induktion nach n.
Im Fall n = 1 ist P ein Punkt oder eine Strecke und die Behauptung trifft zu.
Im Fall n > 1 sei x ∈ P ein Endpunkt von P , welchen es nach 6.2.17 gibt. Offenbar gilt
x ∈ Hui =ei für mindestens ein i und x ist auch Endpunkt von P ∩ Hui =ei =: P 0 . Nun ist
nach Induktionsvoraussetzung P 0 ein Polytop und hat daher nur endlich viele Ecken, also nach
6.2.16 endlich viele Endpunkte. Daher besitzt auch P nur endlich viele Endpunkte x1 , . . . , xk .
Wir setzen S := conv(x1 , . . . , xk ) und behaupten S = P . Andernfalls gibt es ein p ∈ P \ S.
Dazu gibt es wegen Lemma 6.1.7 eine trennende Hyperebene Hu=e mit u(p) < e < u(S). Es
seien mu := min(u(P )) sowie
Y := {y ∈ P ; u(y) = mu }.
Dann hat man Y ∩ S = ∅. Offenbar ist Y selbst ein beschränktes Polyeder und besitzt daher
einen Endpunkt q, welcher offenbar auch Endpunkt von P ist. Dies ist aber ein Widerspruch
dazu, dass S alle Endpunkte von P enthält.
Für die Umkehrung benötigen wir ein weiteres Lemma:
6.2.20 Lemma Für ein volldimensionales Polytop P ⊂ Rd gilt
[
∂P =
F.
F P,F 6=P
100
Polytope
Beweis
Die Inklusion ⊃ ist klar, da es sich um echte Seiten handelt. Für die umgekehrte
Inklusion können wir ohne Einschränkung 0 ∈ P ◦ annehmen. Es sei nun x ∈ ∂P . Dann gibt es
zu jedem n ∈ N ein yn ∈ Rd \P mit kx−yn k < n1 (bzgl. der durch das Skalarprodukt induzierten
Norm). Wegen Lemma 6.1.7 und Aufgabe 6.1.8 gibt es zu diesem yn ein un mit hun , P i < 1 und
hun , yn i > 1. Da die un auf P beschränkt sind und Null innerer Punkt von P ist, kann man
un → u für ein u ∈ Rn annehmen. Für dieses u gilt dann hu, P i ≤ 1 und hu, xi = 1. Damit gilt
x ∈ F := P ∩ Hu=1 .
Damit erhalten wir die angekündigte Charakterisierung von Polytopen als kompakter Durchschnitt endlich vieler Halbräume.
6.2.21 Satz Es sei P ⊂ Rn ein volldimensionales Polytop mit Seiten F1 , . . . , Fk . Weiter seien
ui ∈ Rn und ei ∈ R mit P ⊂ Hui ≥ei und Fi = P ∩ Hui =ei , 1 ≤ i ≤ k. Dann gilt
P =
k
\
Hui ≥ei .
i=1
Beweis Die
T Inklusion ”⊂“ ist offensichtlich richtig. Es bleibt also ”⊃“ zu zeigen. Sonst gibt
es ein x ∈ Hui ≥ei \ P . Zu y ∈ P ◦ schneidet dann die Strecke xy den Rand ∂P , also nach
6.2.20 eine Seite Fi P in zi . Dann gilt offenbar ui (x) ≥ ei , ui (zi ) = ei und ui (y) > ei . Dies ist
aber ein Widerspruch dazu, dass x und y auf verschiedenen Seiten von zi liegen.
Die Darstellungen eines Polytops als konvexe Hülle endlich vieler Punkte bzw. als Schnitt
endlich vieler Halbräumesind in gewissem Sinn dual zueinander und hängen daher eng mit dem
Konzept des Dualisierens von Polytopen zusammen:
◦
6.2.22 Definition Es sei P ⊂ Rn ein Polytop mit dim(P ) = n und 0 ∈ P . Dann heißt P
dualisierbar und
P ∗ := {u ∈ Rn ; hu, P i ≥ −1}
das zu P duale Polytop.
◦
6.2.23 Aufgabe Es sei P ein Polytop mit 0 ∈
/ P . Man untersuche die (wie in 6.2.22 definierte)
∗
Menge P in dieser Situation.
6.2.24 Satz Es sei P ⊂ Rn ein dualisierbares Polytop. Dann gelten
1. P ∗ ist ein dualisierbares Polytop.
2. (P ∗ )∗ = P .
3. Ist F P eine Seite von P , so ist
F ∗ := {u ∈ P ∗ ; hu, F i = −1}
eine Seite von P ∗ mit dim(F ) + dim(F ∗ ) = n − 1.
4. fj (P ∗ ) = fn−j−1 (P ), −1 ≤ j ≤ n.
6.2 Polytope
101
Beweis
1. Da P beschränkt ist, gibt es ein r > 0 mit kvk ≤ r für alle v ∈ P . Wählt man nun u ∈ Rn
mit kuk ≤ 1r , so gilt für jedes v ∈ P aufgrund der Cauchy-Schwarzschen Ungleichung
|hv, ui| ≤ kvk · kuk ≤ 1 =⇒ hu, vi ≥ −1.
Daher gilt K(0, 1r ) ⊂ P ∗ , also ist Null innerer Punkt von P ∗ .
Da umgekehrt Null innerer Punkt von P ist, gibt es ein ε > 0 mit Uε (0) ⊂ P . Es sei
R := 2ε . Für u ∈ P ∗ gibt es ein λ < 0, sodass für v := λu gilt kvk = 2ε , also speziell v ∈ P .
Damit gilt
2
ε
−1 ≤ hu, vi = λkuk2 = − kuk =⇒ kuk ≤ = R,
2
ε
∗
somit ist P beschränkt.
Es seien v1 , . . . , vm die Ecken von P . Dann behaupten wir
∗
P =
m
\
Hvi ≥−1 .
i=1
Die Inklusion ⊂“ ist offenbar richtig. Umgekehrt gelte für ein u ∈ Rn die Beziehung
”
hu, vi i ≥ −1 für alle 1 ≤ i ≤ m. Jedes v ∈ P ist nach Lemma 6.2.2 eine Konvexkombination der vi , was sofort hu, vi ≥ −1 zeigt, also u ∈ P ∗ .
Insgesamt ist P ∗ also ein beschränkter Polyeder und somit nach Satz 6.2.19 ein Polytop.
2. Für v ∈ P gilt hv, ui ≥ −1 für jedes u ∈ P ∗ , also v ∈ (P ∗ )∗ , was P ⊂ (P ∗ )∗ , zeigt. Zu
v∈
/ P gibt es nach Lemma 6.1.7 und Aufgabe 6.1.8 ein u mit hu, vi < −1 und hu, P i > −1
(beachte 0 ∈ P ◦ ), also insbesondere u ∈ P ∗ und v ∈
/ (P ∗ )∗ , was die umgekehrte Inklusion
zeigt.
3. Es sei v ein Element des relativen Inneren von F . Wegen 2. gilt dann hv, P ∗ i ≥ −1.
Wir setzen nun F 0 := Hv=−1 ∩ P ∗ und behaupten F 0 = F ∗ : Dazu sei u ∈ F 0 . Dann gilt
hu, vi = −1. Weil v im relativen Innern von F liegt, gilt dann auch hu, F i = −1, also
folgt u ∈ F ∗ . Die umgekehrte Inklusion ist klar. Daher ist F ∗ Seite von P ∗ . Die Aussage
über die Dimension folgt aus dem Lemma 6.2.7
4. Das folgt direkt aus dem bereits Bewiesenen.
6.2.25 Aufgabe
1. Man zeige, dass das duale Polytop eines n-Ecks (ein Polytop im R2 mit
n Ecken) wieder ein n-Eck ist.
2. Man bestimme die dualen Polytope zu den Polytopen aus Aufgabe 6.2.9.
3. Es sei P ein dualisierbares Polytop mit Facetten F1 , . . . , Fs , die durch die Hyperebenen
Hui =ei , 1 ≤ i ≤ s, definiert seien. Dann gilt
ui
, 1 ≤ i ≤ s.
P ∗ = conv(u01 , . . . , u0s )
mit u0i :=
|ei |
102
6.3
Polytope
Graphen von Polytopen und die Eulersche Polyederformel
In diesem Abschnitt betrachten wir Graphen von Polytopen und zeigen mit deren Hilfe für
dreidimensionale Polytope die berühmte Eulersche Polyederformel, die eine fundamentale Beziehung zwischen den Seiten eines dreidimensionalen Polytops aussagt. Als Anwendung studieren wir die regelmäßigen dreidimensionalen Polytope, die platonischen Körper. Abschließend
geben wir dann noch einen Beweis für die Eulersche Polyederformel in beliebigen Dimensionen.
6.3.1 Definition Ein Graph G = (V, E) ist ein Paar bestehend aus einer endlichen Menge V
(den Knoten“) sowie einer Teilmenge E ⊂ V 2 (den Kanten“).
”
”
Einen Graph G = (V, E) kann man graphisch dadurch darstellen, dass man für jedes v ∈ V
einen Punkt in der Ebene markiert und zwei zu v1 , v2 ∈ V gehörende Punkte genau dann durch
eine Linie verbindet, wenn (v1 , v2 ) ∈ E gilt. Unterscheidet man dabei die Kanten (v1 , v2 ) und
(v2 , v1 ), so spricht man von einem gerichteten Graphen, andernfalls von einem ungerichteten
Graphen (genauer gilt dann E ⊂ V 2 / ∼ mit (x, y) ∼ (y, x) — wir werden im Folgenden aber
auch in diesem Fall einfach V 2 notieren). Wir werden uns in erster Linie mit ungerichteten
Graphen auseinandersetzen, nicht zuletzt deshalb, weil jedes Polytop in naheliegender Weise
einen ungerichteten Graphen definiert:
6.3.2 Definition Es sei P ein Polytop. Setzt man V := {F P ; dim(F ) = 0} und E :=
{(F1 , F2 ) ∈ V 2 ; ∃F P dim(F ) = 1, F1 , F2 ∈ F }, so heißt
G(P ) := (V, E)
der Graph des Polytops P .
Wie oben erwähnt, identifizieren wir dabei die Kanten (v1 , v2 ) und (v2 , v1 ) in V 2 .
6.3.3 Aufgabe Man gebe die Graphen des Würfels sowie der k-fachen Doppelpyramiden über
I := [−1, 1] an.
Im folgenden stellen wir einige Eigenschaften des Graphs eines Polytops zusammen:
6.3.4 Bemerkung Es sei P ⊂ Rd ein d-dimensionales Polytop.
1. Der Graph G(P ) ist einfach, d.h. es gibt keine Schleifen oder mehrfachen Kanten.
2. Jeder Knoten V von G(P ) hat mindestens Grad d, d.h. es gibt mindestens d Kanten, die
V enthalten.
6.3.5 Lemma Der Graph eines dreidimensionalen Polytops ist planar, d.h. der Graph lässt
sich in einer Ebene ohne Überschneidungen darstellen.
6.3 Graphen von Polytopen und die Eulersche Polyederformel
103
Beweis Ohne Einschränkung sei P ⊂ R3 ein Polytop mit 0 als innerem Punkt. Dann gibt
es ein r > 0 mit kxk < r für alle x ∈ P . Durch Streckung kann man annehmen, dass r = 1 gilt.
Projiziert man P nun auf S 2 und wendet anschließend eine stereographische Projektion dieses
Bildes auf die Ebene an, so erhält man (gegebenenenfalls nach einer geeigneten Drehung von
S 2 ) offenbar einen planaren Graphen.
6.3.6 Satz (Satz von Balinski) Es sei P ⊂ Rd ein d-dimensionales Polytop. Der zugehörige
Graph G(P ) ist dann d-zusammenhängend, d.h. er bleibt auch nach Entfernen von d−1 Knoten
(und allen an diesen Knoten anliegenden Kanten) zusammenhängend.
Beweis Es sei V die Knotenmenge von G(P ), d.h. P = conv(V ); dabei identfizieren wir die
Ecken von P mit den Knoten von G(P ). Aufgrund der Dimensionsbedingung hat V mindestens
d + 1 Elemente. Mit S := {E1 , . . . , Ed−1 } bezeichnen wir die d − 1 Knoten, die entfernt werden.
Der resultierende Graph sei mit G0 := G(P ) − S sowie seine Knotenmenge mit V 0 := V \ S
bezeichnet. Es sei
d−1
1 X
Ei
w :=
d − 1 i=1
der Eckenschwerpunkt von S. Dann gibt es zwei Möglichkeiten:
1. Fall: Es gibt eine echte Seite F ≺ P mit w ∈ F ; dann liegen auch alle Ei ∈ F , 1 ≤ i ≤ d − 1.
Man wähle nun eine Hyperebene H := Hu=e mit F = P ∩ H und P ⊂ Hu≥e . Weil P kompakt
ist, nimmt u auf P sein Maximum, etwa m, an und durch F 0 := Hu=m ∩ P wird eine weitere
Seite von P definiert. Alle Knoten in V 0 liegen dann entweder in F 0 oder lassen sich mit Ecken
mit einem größeren u-Wert verbinden. Damit lässt sich jeder Knoten von V 0 mit einer Ecke
von F 0 verbinden. Da F 0 selbst ein Polytop ist, ist der Graph von F 0 und somit auch G0
zusammenhängend.
Im 2. Fall liegt w im Innern von P . In diesem Fall überlassen wir den Beweis dem Leser zur
Übung.
6.3.7 Beispiel Der kleinste 3-zusammenhängende planare Graph ist der Graph K4 , der aus
vier Knoten und sechs Kanten besteht.
Man kann zeigen, dass umgekehrt jeder einfache, planare, drei-zusammenhängende Graph der
Graph eines dreidimensionalen Polytops ist (Satz von Steinitz, vgl. [41], Theorem 4.1 — welches
Polytop führt auf den K4 ?). Wir verzichten auf diesen Nachweis und wenden uns nun der
berühmten Eulerschen Polyederformel zu:
6.3.8 Satz Es sei P ⊂ Rn ein n-dimensionales Polytop mit f -Vektor f = (f0 , f1 , . . . , fn−1 ).
Dann gilt
n−1
X
(−1)i fi = 1 − (−1)n .
i=0
Man überzeugt sich schnell, dass die Eulersche Polyederformel für 1 oder 2-dimensionale Polyeder zutrifft:
104
Polytope
6.3.9 Bemerkung Gilt n ≤ 2, so ist 6.3.8 offensichtlich.
Einen Beweis für allgemeine Dimensionen stellen wir zunächst zurück und zeigen die Aussage
für den speziellen (historischen) Fall n = 3 mit einem auch für den Schulunterricht geeigneten
Beweis:
Beweis (von 6.3.8 für dreidimensionale Polytope) Es sei G := G(P ) der Graph von P . Dann
entsprechen die Knoten von G den Ecken von P , die Kanten von G den Kanten von P und
die Komponenten von G den Facetten von P , wenn man die äußere Komponente mitzählt. Wir
zeigen die behauptete Gleichung etwas allgemeiner für einen planaren,zusammenhängenden
Graphen und führen dabei Induktion nach f1 . Im Fall f1 = 0 besteht der Graph aus einem
Knoten und null Kanten und einer (deräußeren) Komponente und damit gilt
f0 − f1 + f2 = 1 − 0 + 1 = 2,
wie behauptet.
Für den Schritt von f1 auf f1 + 1, d.h. dem Hinzufügen einer Kante zu einem Graphen, so gibt
es die folgenden Möglichkeiten:
a) Es wird eine Kante und ein Knoten hinzugefügt; dabei bleibt die Eulerformel gültig.
b) Zwei bestehende Knoten werden durch eine neue Kante verbunden. Dann erhöhen sich
Gebiete- und Kantenanzahl jeweils um eins, und die Eulerformel bleibt gültig.
Da sich jeder Graph in dieser Form konstruieren lässt, erhält man die Behauptung.
Im Folgenden diskutieren wir eine Anwendung der Eulerschen Polyederformel und betrachten
dazu die platonischen Körper.
6.3.10 Definition Ein platonischer Körper ist ein dreidimensionales Polytop, dessen Facetten
kongruente regelmäßige n-Ecke sind, und bei dem es ein k gibt, sodass jede Ecke in genau k
Facetten enthalten ist.
Bereits in der Antike stellte man fest, dass es — bis auf Ähnlichkeit — genau fünf platonische
Körper gibt. Das damals gefundene, auch gut für den Schulunterricht geeignete Argument nutzt
die Winkelsumme im regelmäßigen n-Eck: Offenbar ist klar, dass die Zahlen k und n in 6.3.10
mindestens den Wert drei haben müssen. Im Fall von n = 3 hat das regelmäßige Dreieck den
Innenwinkel π3 , d.h. für k kommen dann nur die Werte 3, 4 oder 5 in Frage. Im Fall von n = 4
ist der Innenwinkel bereits π2 , für n = 5 ist er 3π
, daher kann k in diesen beiden Fällen nur 3
10
sein. Im Fall von n ≥ 6 müsste k < 3 sein, was nicht sein kann.
Wir stellen noch einen weiteren Beweis dieser Tatsache vor, der im Wesentlichen auf der Eulerschen Polyederformel basiert.
6.3.11 Satz Es gibt bis auf Ähnlichkeit maximal fünf platonische Körper, nämlich den Tetra-,
Hexa-, Okta,- Dodeka- sowie den Ikosaeder.
6.3 Graphen von Polytopen und die Eulersche Polyederformel
105
Beweis Da jede Ecke in k Facetten liegt, aber jede Facette genau n Ecken hat, folgt nf2 =
kf0 . Ebenso sieht man 2f1 = nf2 . Mit Hilfe der Eulerschen Polyederformel erhält man daraus
f2 (2k − kn + 2n) = 4k > 0 =⇒
kn
< 2.
k+n
Zusammen mit n, k ≥ 3 sieht man schnell, dass die einzigen ganzzahligen Lösungstupel dieser
Ungleichung gegeben sind durch (3, 3), (3, 4), (4, 3), (3, 5) und (5, 3).
Die Existenz der angesprochenen platonischen Körper, nämlich des Tetraeders (dreiseitige Pyramide), Hexaeders (Würfel), Oktaeders (Doppelpyramide über einem Quadrat), Dodekaeders
(Zwölfflächner aus regelmäßigen Fünfecken) und des Ikosaeders (Zwanzigflächners aus gleichseitigen Dreiecken) überlassen wir dem Leser.
6.3.12 Aufgabe
1. Man zeige, dass es mindestens fünf platonische Körper gibt.
2. Es sei P ein platonischer Körper mit Mittelpunkt 0 ∈ P ◦ . Man zeige, dass das duale Polytop P ∗ ebenfalls ein platonischer Körper ist und gebe die zu den angegebenen platonischen
Körpern dualen Polytope an.
3. Man bestimme die f -Vektoren der platonischen Körper.
Wir wenden uns nun dem Beweis der Eulerschen Polyederformel für beliebige Dimensionen zu.
Dabei folgen wir im Wesentlichen dem Beweis von B. Grünbaum (vgl. [17]). Wir zeigen im
ersten Schritt, dass die in 6.3.8 behauptete Gleichung für eine spezielle Klasse von Polytopen,
nämlich für Prismoide, gültig ist. Wir vereinbaren zunächst noch eine spezielle Sprechweise:
Ein Polytop der Dimension d nennen wir ein d-Polytop.
6.3.13 Definition Ein d-Polytop P heißt Prismoid, falls es höchstens (d − 1)-dimensionale
Polytope P1 , P2 gibt, die in Hyperebenen H1 bzw. H2 so liegen, dass (P1 ∪ P2 ) ∩ H1 ∩ H2 = ∅
gilt, mit der Eigenschaft, dass P = conv(P1 , P2 ) gilt.
6.3.14 Lemma Es sei P ein d-Prismoid. Dann erfüllt P die Eulersche Polyederformel, falls
jedes k-Polytop mit k < d die Eulersche Polyederformel erfüllt.
Beweis Wir stellen P gemäß der Definition 6.3.13 dar und wählen (in obiger Notation) eine
Hyperebene H0 zwischen H1 und H2 , die einen inneren Punkt von P enthält. Es sei P0 := H0 ∩P .
Dann gelten
a) f0 (P ) = f0 (P1 ) + f0 (P2 ),
b) jede k-Seite F von P , 1 ≤ k ≤ d − 1, ist entweder eine k-Seite von P1 oder P2 oder definiert
eineindeutig eine (k − 1)-dimensionale Seite von P0 . Man erhält
fk (P ) = fk (P1 ) + fk (P2 ) + fk−1 (P0 )
mit fk (Pi ) := 0 für k > dim(Pi ), i = 1, 2. Da P0 , P1 und P2 höchstens (d − 1)-dimensional
sind, können wir davon ausgehen, dass diese die Eulersche Polyederformel erfüllen. Es seien
106
Polytope
d1 := dim(P1 ) und d2 := dim(P2 ). Weiter gilt offenbar dim(P0 ) = d − 1. Damit erhalten wir
d−1
X
(−1)i fi (P ) =
i=0
f0 (P1 ) + f0 (P2 ) +
dX
1 −1
i
(−1) fi (P1 ) +
dX
2 −1
i=1
d1
d2
d−1
d2
(−1) fi (P2 ) + (−1) + (−1) −
d−2
X
(−1)i fi (P0 )
i=0
i=1
d1
d2
d1
i
= 1 − (−1) + 1 − (−1) + (−1) + (−1) − 1 + (−1)
d
= 1 − (−1) .
6.3.15 Lemma Es sei P ein d-Polytop und H = Hu=e eine Hyperebene, die P im Innern
trifft und genau eine Ecke v von P enthält. Weiter seien P0 := P ∩ H, P+ := P ∩ Hu≥e und
P− := P ∩ Hu≤e . Erfüllen dann P0 , P+ und P− den Satz 6.3.8, so auch P .
Beweis Die Idee besteht darin, die Seitenzahlen von P durch die von P0 , P+ und P− auszudrücken. Zunächst gilt offenbar
f0 (P ) = f0 (P+ ) + f0 (P− ) − 2f0 (P0 ) + 1.
Weiter hat man
f1 (P ) = f1 (P+ ) + f1 (P− ) − 2f1 (P0 ) − f0 (P0 ) + 1,
da jede Kante von P , die P0 nicht in v trifft, in eine Kante von P1 und eine von P2 geteilt wird.
Für 2 ≤ i ≤ d − 2 gilt analog
fi (P ) = fi (P+ ) + fi (P− ) − 2fi (P0 ) − fi−1 (P0 ).
Für Facetten von P gilt schließlich
fd−1 (P ) = fd−1 (P+ ) + fd−1 (P− ) − 2 − fd−2 (P0 ).
Damit erhält man dann
d−1
X
i=0
d−1
X
(−1)i fi (P ) =
i
(−1) (fi (P+ ) + fi (P− )) − 2
d−2
X
i=0
i
(−1) fi (P0 ) +
i=0
d
d−1
= 2(1 − (−1) ) − (1 − (−1)
d−2
X
(−1)i fi (P0 ) + 1 − 1 − 2(−1)d−1
i=0
d
) + 2(−1) = 1 − (−1)d .
Damit können wir nun die Eulersche Formel beweisen:
Beweis (von 6.3.8) Wir führen Induktion nach d := dim(P ). Der Induktionsanfang ist durch
6.3.9 gegeben. Zu einem d-Polytop P wähle man eine Hyperebene H, sodass keine zu H parallele
6.4 Ergänzungen zur Graphentheorie
107
Hyperebene mehr als eine Ecke von P enthält. Dann gibt es zu H parallele Hyperebenen
H1 , . . . , Hs , sodass jedes Hi := Hui =ei genau eine Ecke von P enthält. Weiter seien die Hi so
nummeriert, dass Hi+1 ⊂ Hi,+ := Hui ≥ei für jedes 1 ≤ i ≤ s − 1 gilt. Man setze
Pi := Hui ≥ei ∩ Hui+1 ≤ei+1 ∩ P,
1 ≤ i ≤ s − 1.
Offenbar ist dann jedes Pi ein d-Prismoid. Wegen Lemma 6.3.14 erfüllt somitSunter Ausnutzung
der Induktionsvoraussetzung jedes Pi die Eulerformel. Weiter sei P (j) := ji=1 Pi . Dann läßt
sich auf P (j+1) , Hj+1 , P (j) und Pj+1 das Lemma 6.3.15 anwenden und jedes P (`) , 1 ≤ ` ≤ s − 1,
erfüllt die Eulersche Polyederformel. Wegen P (s−1) = P erhält man die Behauptung.
6.4
Ergänzungen zur Graphentheorie
In diesem Abschnitt gehen wir kurz auf zwei berühmte Sätze der Graphentheorie ein, nämlich
den Satz von Euler und den Vierfarbensatz.
Der Satz von Euler geht auf das berühmte Problem der Brücken von Königsberg“ zurück. Euler
”
soll damals gefragt worden sein, ob man alle Brücken von Königsberg auf einem Rundgang
queren kann, ohne dabei eine Brücke mehrmals zu benutzen. Er löste dieses Problem, wobei er
dabei die moderne Graphentheorie begründete.
6.4.1 Definition Es sei G := (V, E) ein zusammenhängender Graph. Ein Eulerweg des Graphen G ist eine Aufzählung der Kanten E = (ei )1≤i≤m , wobei ei = (vi1 , vi2 ) mit vi2 = v(i+1)1 für
1 ≤ i ≤ m − 1 sowie ei 6= ej für i 6= j gelten.
6.4.2 Beispiel
lerweg.
1. Der durch ein n-Eck kanonisch definierte Graph besitzt immer einen Eu-
2. Der Graph des Tetraeders besitzt keinen Eulerweg.
6.4.3 Definition Der Grad deg(v) eines Knotens v ∈ V des Graphens G = (V, E) ist die
Anzahl der Kanten die v enthalten:
deg(v) = |{e ∈ E; v ∈ e}|.
Mit dem Begriff des Grad eines Knotens läßt sich bereits der Satz von Euler formulieren.
6.4.4 Satz Ein Graph (V, E) besitzt genau dann einen Eulerweg, wenn es keinen oder genau
zwei Knoten von ungeradem Grad gibt.
Beweis
⇒:“ Es sei E = (ei ) ein Eulerweg des Graphen (V, E). Für 1 ≤ i ≤ m − 1 gilt
”
ei 3 vi2 = vi1 ∈ ei+1 ,
d.h. für alle Knoten v ∈ V \ {v11 , vm2 } ist deg(v) gerade. Im Fall v11 = vm2 haben alle Knoten
geraden Grad, andernfalls gibt es genau zwei Knoten mit ungeradem Grad.
108
Polytope
⇐:“ Wir nehmen zunächst an, dass G := (V, E) nur Knoten geraden Grades hat und zeigen,
”
dass G dann sogar einen Eulerkreis, also einen geschlossenen Eulerweg besitzt. Wir wählen
einen Knoten V ∈ G. Offenbar enthält G einen Kreis, der V enthält, da alle Knoten geraden
Grad größer gleich zwei haben. Es sei C ein solcher Eulerkreis maximaler Länge (dabei ist die
Länge die Anzahl der Kanten, die in C liegen). Wir behaupten, dass C alle Kanten von G
enthält. Andernfalls sei E = (Y, X) eine Kante, die nicht in C enthalten ist. Dann gibt es, da G
zusammenhängend ist, einen Weg W = (V0 = X, V1 , . . . , Vr−1 , Vr = V ) der X mit V verbindet.
Weiter setzen wir V−1 := Y . Dann sei Vi , 0 ≤ i ≤ r, der erste Knoten von W , der in C liegt.
Dann ist E 0 := (Vi−1 , Vi ) nicht in C. Es sei G0 := G \ C. Jeder Knoten in G0 hat geraden Grad,
da ja aus dem geraden Graphen G der gerade Graph C entnommen wurde. Daher gibt es wie
oben einen Kreis C 0 in G0 , der die Kante E 0 enthält. Die Verbindung C ∪ C 0 definiert dann
b in G, der echt größer als C ist, was ein Widerspruch ist.
einen Kreis C
Für den Fall, dass G genau die zwei Knoten U und V von ungeradem Grad besitzt, betrachten
wir den Graphen G0 := G ∪ (U, V ). Dieser enthält nur Knoten von geradem Grad und besitzt
nach dem ersten Teil des Beweises einen Eulerkreis. Entfernt man von diesem wieder die Kante
(U, V ) erhält man einen Eulerweg für G.
Abschließend gehen wir noch kurz auf Färbungsprobleme ein:
6.4.5 Definition Es sei G = (V, E) ein (schleifenfreier) Graph und n ∈ N. Eine surjektive
Abbildung f : V → {1, . . . , n} heißt n-Färbung von G, falls für alle Kanten e = (vi , vj ) ∈ E
immer f (vi ) 6= f (vj ) gilt.
Offenbar besitzt jeder schlingenfreie Graph G = (V, E) für n := |V | eine n-Färbung, indem man
einfach jedem Knoten eine andere Zahl zuordnet. Die interessante Frage ist offenbar, welches
das kleinste n ∈ N ist, sodass ein gegebener Graph eine n-Färbung besitzt. Man nennt ein
solches n die chromatische Zahl χ(G) des Graphen G.
Für planare Graphen sieht man schnell ein, dass die chromatische Zahl mindestens 4 beträgt,
wie das Beispiel in Abbildung 6.1 zeigt:
Abbildung 6.1: Ein Graph mit mindestens vier Farben samt Landkarte
Im Jahr 1852 fragte der Student Francis Guthrie den Mathematiker Auguste de Morgan, ob es
richtig sei, dass man eine Landkarte immer mit 4 Farben so färben könne, dass zwei aneinander
6.4 Ergänzungen zur Graphentheorie
109
grenzende Länder verschiebenfarbig gefärbt sind. Da de Morgan die Frage nicht lösen konnte,
legte er sie seinem Kollegen William Hamilton vor, der aber auch keine Lösung angeben konnte.
In der folgenden Zeit wurde dieses Problem als Vierfarben-Vermutung weltberühmt, und erst
1976 wurde diese Frage von W. Haken und K. Appel unter massivem Computereinsatz positiv
beantwortet: Sie reduzierten das Problem dazu auf eine endliche (exakt 1936 - später gelangen
weitere Reduktionen) Anzahl von Fällen, welche dann ein Computer rechnete (zur weiteren
Informationen bzgl. dieser Fragestellung vgl. ???).
Offenbar ist die Fragestellung gleichbedeutend mit der Frage, ob jeder planare Graph eine 4Färbung besitzt. Wir wollen hier die den deutlich einfacher zu zeigenden Fünffarbensatz zeigen,
also die Aussage, dass jeder planare Graph immer eine 5-Färbung zulässt.
Wir zeigen zunächst zwei auch für sich genommen interessante Aussagen über planare Graphen.
6.4.6 Satz Es sei G = (V, E) ein einfacher, planarer, zusammenhängender Graph mit f0 := |V |
und f1 := |E|. Dann gilt
f1 ≤ 3f0 − 6
Beweis Mit f2 bezeichnen wir die Anzahl der Zusammenhangskomponenten von G, wobei
wir die unbeschränkte Komponente mitzählen. Da jede derartige Komponente von mindestens
3 Kanten begrenzt, aber jede Kante an genau zwei Komponenten grenzt, gilt 3f2 ≤ 2f1 . Setzt
man dies in die Eulersche Polyederformel ein, so folgt
2
2 = f2 − f1 + f0 ≤ f1 − f1 + f0 =⇒ f1 ≤ 3f0 − 6.
3
Damit zeigen wir nun
6.4.7 Satz Jeder einfache planare Graph besitzt einen Knoten vom Grad d ≤ 5.
Beweis
Angenommen jeder Knoten hätte einen Grad d ≥ 6. Dann käme jeder Knoten in
mindestens 6 Kanten vor. Da aber jede Kante zwei Knoten enthält, folgt 6f0 ≤ 2f1 . Zusammen
mit 6.4.6 folgt
6f0 ≤ 2f1 ≤ 6f0 − 12 =⇒ 12 ≤ 0,
was nicht sein kann.
Damit können wir den Fünffarbensatz zeigen:
6.4.8 Satz Jeder planare, einfache, zusammenhängende Graph G = (V, E) ist 5-färbbar.
Beweis
Wir führen Induktion nach f0 := |V |. Für f0 ≤ 5 ist die Aussage trivialerweise
zutreffend. Es sei nun also f0 > 5. Nach Satz 6.4.7 gibt es einen Knoten v0 vom Grad kleiner
gleich fünf. Ist der Grad echt kleiner als 5, so ist der Graph G0 := G \ v0 nach Induktionsvoraussetzung 5-färbbar, und die mit v0 verbundenen Knoten sind mit maximal 4 Farben gefärbt:
Daher bleibt eine Farbe für v0 übrig und es gibt eine 5-Färbung von G.
110
Polytope
Ist der Grad von v0 genau 5, so gibt es zwei Nachbarn v1 und v3 von v0 , die selbst nicht
benachbart sind. Dann betrachten wir den Graphen G0 , der entsteht, wenn man v0 entfernt
und v1 mit v3 identifiziert. Dieser besitzt nach Induktionsvoraussetzung eine 5-Färbung, aus
der man wieder eine 5-Färbung von G gewinnen kann.
Kapitel 7
Bilinearformen und Kegelschnitte
Quadriken wurden als Kegelschnitte bereits in der Antike ausführlich untersucht. In diesem
Kapitel gehen wir auf einige (zum Teil wohl bekannte) Ergebnisse über quadratische Formen
aus der linearen Algebra ein, bevor wir die ebenen Quadriken wie Parabel, Hyperbel und Ellipse
auf geometrischem Wege konstruieren und einige Eigenschaften festhalten.
7.1
Bilinearformen
In diesem Abschnitt wiederholen wir einige — vermutlich schon aus der Linearen Algebra
bekannte — Grundaussagen über Bilinearformen. Eine (reelle) Bilinearform ist dabei eine Abbildung
ϕ: V × V → R
des kartesischen Produktes eines R-Vektorraums mit sich selbst nach R, die linear in jedem
Argument ist. Sie heißt symmetrisch, falls für alle v, w ∈ V gilt ϕ(v, w) = ϕ(w, v).
7.1.1 Definition Es sei V ein R-Vektorraum. Eine symmetrische Bilinearform ϕ : V × V → R
heißt nicht-ausgeartet, wenn es zu jedem v ∈ V ein u ∈ V gibt mit ϕ(v, u) 6= 0.
Wir werden uns im Folgenden auf symmetrische Bilinearformen beschränken, auch wenn wir
dies nicht in jedem Fall explizit erwähnen werden.
7.1.2 Beispiel
arform.
1. Das übliche Skalarprodukt auf dem Rn ist eine nicht-ausgeartete Biline-
2. Ist V ein Vektorraum, so ist die triviale Abbildung ϕ : V × V → R, (v, w) 7→ 0 nicht
nicht-ausgeartet, also ausgeartet.
3. Ist V = C[0; 1] der Raum der stetigen Funktionen auf [0, 1], so ist
Z 1
ϕ(f, g) :=
f (x)g(x) dx
0
112
Bilinearformen und Kegelschnitte
eine nicht-ausgeartete Bilinearform auf V .
7.1.3 Definition Ist V ein endlich-dimensionaler Vektorraum und B : v1 , . . . , vn eine Basis von
V sowie ϕ : V × V → R eine Bilinearform, so heißt
MB (ϕ) := (ϕ(vi , vj ))i,j
Matrix von ϕ bzgl. der Basis B.
Offenbar ist der folgende Satz richtig:
7.1.4 Satz Es sei V ein endlich dimensionaler R-Vektorraum und B eine Basis von V . Dann
ist die Abbildung
Bil(V ) → Rn×n , ϕ 7→ MB (ϕ)
bijektiv.
7.1.5 Bemerkung Es sei V ein endlich dimensionaler R-Vektorraum und ϕ : V × V → R eine
Bilinearform. Sind B und B 0 Basen von V und S die Matrix des Basiswechsels von B 0 zu B, so
gilt
MB 0 = S > · MB · S.
Ist ϕ eine nicht-ausgeartete Bilinearform auf dem R-Vektorraum V , so nennen wir zwei Vektoren
v, w ∈ V ϕ-orthogonal (wenn der Zusammenhang klar ist, auch nur orthogonal), wenn ϕ(v, w) =
0 gilt.
7.1.6 Aufgabe Es sei V ein R-Vektorraum mit einer nicht-ausgearteten symmetrischen Bilinearform ϕ. Ist W ⊂ V ein Unterraum von V , so heißt W ⊥ das ϕ-orthogonale Komplement
von V . Man zeige, dass W ⊥ ein Unterraum von V ist.
Ist ϕ : V × V → R eine symmetrische Bilinearform auf V , so wird durch q(v) := ϕ(v, v) eine
quadratische Form definiert.
7.1.7 Aufgabe Man zeige, dass ϕ durch die zugehörige quadratische Form vollständig bestimmt ist.
Der Hauptsatz über Bilinearformen (der über beliebigen Körpern mit Charakteristik ungleich
zwei gilt) liefert die Existenz von Orthonormalbasen (im entsprechenden Sinne)
7.1.8 Satz Es sei V ein endlich dimensionaler R-Vektorraum und ϕ : V × V → R eine nichtausgeartete Bilinearform mit zugehöriger quadratischer Form q. Dann gibt es eine Basis (man
sagt auch ϕ-Orthonormalbasis“) v1 , . . . , vn von V mit
”
ϕ(vi , vj ) = 0 für i 6= j,
q(vi ) = −1, 1 ≤ i ≤ r,
q(vi ) = 1, r + 1 ≤ i ≤ n.
7.2 Kegelschnitte
Beweis
richtig.
113
Wir führen Induktion nach n := dim V . Für n = 1 ist die Behauptung offensichtlich
Für n > 1 folgt aus Aufgabe 7.1.7 die Existenz eines Vektors w mit q(w) 6= 0. Setzt man
w0 := √ w , so hat man q(w0 ) = ±1 und damit den ersten Basisvektor gefunden. Für die
|q(w)|
weiteren Basisvektoren setzen wir W := Rw und U := U ⊥ . Dann ist U ein Untervektorraum
von V mit w ∈
/ U , d.h. dim(U ) < n. Die Induktionsvoraussetzung liefert daher eine Basis
u1 , . . . , um von U , wie gewünscht. Es bleibt, m = n − 1 zu zeigen. Dazu sei v ∈ V beliebig und
u := v −
ϕ(w, v)
w.
ϕ(w, w)
Man sieht dann schnell u ∈ U , was zeigt, dass w, u1 , . . . , um ein Erzeugendensystem von V , also
nach Konstruktion sogar eine Basis ist.
7.1.9 Beispiel Wir betrachten für a > 0 die quadratische Form q(x, y) := x2 + 4xy + ay 2 .
Quadratische Ergänzung liefert
q(x, y) = x2 + 4xy + 4y 2 + (a − 4)y 2 = (x + 2y)2 + (a − 4)y 2 .
Damit erhält man für a = 4 eine ausgeartete Bilinearform. Im Fall a > 4 ist die Matrix der
zu q gehörenden Bilinearform bzgl. einer Orthonormalbasis wie in 7.1.8 die Einheitsmatrix,
andernfalls hat sie einen positiven und einen negativen Eintrag auf der Diagonalen. Im ersten
Fall hat die quadratische Form q als Niveaulinien Ellipsen, im zweiten Fall Hyperbeln, wie wir
später sehen werden.
Das geometrische Pendant zum algebraischen Begriff der quadratischen Form sind im zweidimensionalen die Kegelschnitte, denen wir uns nun zuwenden werden.
7.2
Kegelschnitte
In diesem Abschnitt geben wir eine elementargeometrische Einführung der Kegelschnitte und
werden damit das Beispiel 7.1.9 geometrisch verstehen können.
Zu einer Linearform u ∈ R3 \ {0} und a ∈ R3 nennen wir H(u, a) := {x ∈ R3 ; hu, x − ai = 0}
die durch u und a definierte Ebene. In der Notation von 6.1.1 gilt dann gerade H(u, a) = Hu=e
mit e := hu, ai gilt.
Eine Kugel K := K(M ; r) in R3 ist die Menge {x ∈ R3 ; kx − M k = r}. Weiter nennen wir
eine Teilmenge D ⊂ R3 Kreis mit Radius r und Mittelpunkt M , falls es eine Ebene HD ⊂ R3
gibt mit M ∈ H und D = H ∩ K(M ; r). Die Ebene HD ist dann eindeutig bestimmt und heißt
Kreisebene von D.
7.2.1 Aufgabe Man zeige: Ist K eine Kugel und H eine Ebene, so ist K ∩ H entweder leer,
einpunktig oder ein Kreis in H ∼
= R2 .
114
Bilinearformen und Kegelschnitte
7.2.2 Definition Es sei D ein Kreis im R3 mit Mittelpunkt M und Kreisebene H = H(u, a).
Weiter sei S ∈ M + R6=0 u. Dann heißt die Menge
C :=
[
aff(S, y)
y∈D
ein (Kreis-)Doppelkegel mit Spitze S. Die Gerade L := M + Ru heißt Zentralgerade des Kegels.
7.2.3 Bemerkung Eine Teilmenge C ⊂ R3 ist genau dann ein Kegel mit Zentralgerade L =
M + Ru und Spitze S, wenn S ∈ L gilt und für jedes a ∈ L =
6 S die Menge H(u, a) ∩ C ein
Kreis ist.
7.2.4 Definition Ist C ein Kegel mit Zentralgerade L und Spitze S, so ist der Kegelwinkel
(oder halbe Öffnungswinkel) ω von C definiert als ∠L, SY mit Y ∈ C \ {S}.
Bereits in der Antike interessierte man sich für die Kurven, die man erhält, wenn man einen
(Kreis-)Doppelkegel mit einer Ebene schneidet. Offenbar unterscheiden sich diese Kurven je
nach Lage der Ebene. Wie wir in Bemerkung 7.2.3 gesehen haben, ergeben sich Kreise, wenn
die Schnittebene senkrecht zur Leitgeraden ist.
7.2.5 Definition Es sei C ein Doppelkegel mit Spitze S und Zentralgerade L sowie H eine
Ebene mit S ∈
/ H. Der Schnittebenenwinkel ist der Winkel zwischen H und der Zentralgerade
L.
Wir werden sehen, dass das Verhältnis von Schnittebenenwinkel zu Kegelwinkel die entscheidende Größe ist, die die Qualität der Schnittkurve beschreibt. Das entscheidende Hilfsmittel zur
geometrischen Beschreibung der Schnittkurven sind die Dandelinschen Kugeln (Pierre Dandelin, 1794–1847).
7.2.6 Definition Es sei C ein Doppelkegel und H eine Schnittebene. Eine Kugel, die den
Kegel von innen (in einem Kreis) und die Ebene H berührt, heißt Dandelinsche Kugel. Der
Berührpunkt der Kugel mit der Ebene heißt Brennpunkt.
7.2.7 Lemma (Kreistangentensatz) Es sei D ein Kreis mit Kreisebene HD , P ∈ HD außerhalb
von D sowie T1 , T2 Tangenten an den Kreis D durch P mit Berührpunkten B1 und B2 . Dann
gilt |T1 P | = |T2 P |.
Beweis
Der Beweis ist eine einfache Anwendung des Kongruenzsatzes ssW 3.2.14.
7.2.8 Satz Es seien C ein Doppelkegel mit Spitze S und Kegelwinkel ω, H eine Schnittebene
mit Schnittwinkel α > ω. Dann gibt es zwei Punkte F1 und F2 und ein c ∈ R>0 , sodass für alle
P ∈ H ∩ C gilt
|P F1 | + |P F2 | = c.
7.2 Kegelschnitte
115
Abbildung 7.1: Zum Beweis von 7.2.8
Beweis Offenbar gibt es in der betrachteten Situation genau zwei Dandelinsche Kugeln K1
und K2 mit Berührkreisen D1 und D2 in Kreisebenen H1 und H2 . Ferner seien F1 und F2 die
Berührpunkte der Kugeln K1 und K2 mit der Ebene H. Zu P ∈ H ∩ C seien g := SP und
Bi := Di ∩ g, i = 1, 2, (vgl. Abbildung 7.1). Durch die Punkte F1 , B1 und P wird eine Ebene
H 0 definiert. Gemäß Aufgabe 7.2.1 ist H 0 ∩ K1 ein Kreis, der die Geraden P F1 und P B1 als
Tangenten besitzt. Daher liefert der Kreistangentensatz 7.2.7 |P F1 | = |P B1 |. Analog sieht man
|P F2 | = |P B2 |. Insgesamt erhält man
|P F1 | + |P F2 | = |P B1 | + |P B2 | = |B1 B2 |,
wobei der letzte Wert ersichtlich unabhängig von P ist, was die Behauptung liefert.
7.2.9 Definition Eine Kurve wie in 7.2.8 heißt Ellipse; die Punkte F1 und F2 heißen Brennpunkte der Ellipse.
7.2.10 Lemma In der Notation des Beweises von 7.2.8 sei `i := Hi ∩ H, i = 1, 2. Dann gibt
es ein 0 < ε < 1 , sodass für jeden Punkt P ∈ C ∩ H =: E die Beziehung
|P Fi |
=ε
d(P, `i )
gilt.
Beweis Wir verwenden wieder die Notation aus dem Beweis von 7.2.8. Weiter wähle man
L1 ∈ `1 mit d(P, `1 ) = |P L1 |. Ferner setze man T1 := (F1 F2 ) ∩ `1 . Weiter sei A1 ∈ F1 F2 ∩ E so
gewählt, dass |A1 T1 | maximal ist sowie Q1 := (A1 S) ∩ H1 . Dann erhält man (Strahlensatz!)
|P F1 |
|P B1 |
|A1 Q1 |
=
=
.
d(P, `1 )
|P L1 |
|A1 T1 |
116
Bilinearformen und Kegelschnitte
Abbildung 7.2: Zum Beweis von 7.2.10
Wendet man auf das Dreieck A1 Q1 T1 den Sinussatz 3.6.3 an und bezeichnet den Kegelwinkel
und Schnittwinkel wieder mit ω bzw. α, so folgt
sin( π2 − α)
cos(α)
|P F1 |
=
=: ε.
=
π
d(P, `1 )
sin( 2 − ω)
cos(ω)
Weil der Kosinus im Intervall [0, π] streng monoton fallend ist, erkennt man ε < 1.
Für den Fall α < ω gelten analoge Aussagen:
7.2.11 Satz Es seien C ein Doppelkegel mit Spitze S und Kegelwinkel ω, H eine Schnittebene
mit Schnittwinkel α < ω.
1. Dann gibt es zwei Punkte F1 und F2 und ein c ∈ R>0 , sodass für alle P ∈ H ∩ C gilt
|P F1 | − |P F2 | = c.
2. Sind Hi wieder die Berührkreisebenen der Dandelinschen Kugeln, unds setzt man wieder
`i := H ∩ Hi , so gibt es ein ε > 1, sodass für jedes P ∈ H ∩ C gilt
|P Fi |
=ε
d(P, `i )
Beweis Die Beweise verlaufen entsprechend den Beweisen von 7.2.8 und 7.2.10 und werden
dem Leser zur Übung überlassen.
7.2.12 Definition Die Schnittkurve im Fall des Satzes 7.2.11 heißt Hyperbel.
7.2 Kegelschnitte
117
7.2.13 Definition Die Größe ε aus 7.2.10 bzw. 7.2.11 2. heißt Numerische Exzentrizität des
Kegelschnittes.
Der Grenzfall α = ω führt zur Numerischen Exzentrizität von 1 und in der Tat gilt, wie man
mit analogen Argumenten wie bisher einsehen kann:
7.2.14 Satz Es seien C ein Doppelkegel mit Spitze S und Kegelwinkel ω, H eine Schnittebene
mit Schnittwinkel α = ω. Dann gibt es einen Punkt F sowie eine Gerade `, sodass für alle
P ∈ H ∩ C gilt
d(P, `) = |P F |.
Eine derartige Kurve nennt man eine Parabel.
Wir zeigen im Folgenden, dass die Gleichungen der Kegelschnitte gerade Gleichungen entsprechen, die man erhält, wenn man Niveaulinien von quadratischen Formen betrachtet.
Für einen Kegel C und eine Schnittebene H ∼
= R2 mit Schnittwinkel α > ω sei E := C ∩ H
die Schnittellipse mit Brennpunkten F1 und F2 . Durch Identifikation von H mit R2 und nach
Anwenden einer Kongruenzabbildung können wir annehmen, dass F1 = (−f ; 0) und F2 = (f ; 0)
mit f > 0 gelten. Die Ellipsengleichung |P F1 | + |P F2 | = c schreibt sich dann in der Form
p
p
(x + f )2 + y 2 + (x − f )2 + y 2 = c.
Offenbar können wir hier c > 2f annehmen. Dann liefert Quadrieren die äquivalente Gleichung
p
p
(x + f )2 + y 2 + (x − f )2 + y 2 + 2 (x + f )2 + y 2 · (x − f )2 + y 2 = c2
bzw.
p
p
1
(x + f )2 + y 2 · (x − f )2 + y 2 = c2 − x2 − y 2 − f 2 .
2
Erneutes Quadrieren liefert
2
2
2
2
((x + f ) + y ) · ((x − f ) + y ) =
1 2
c − x2 − y 2 − f 2
2
2
,
mit der Zusatzbedingung
1
x 2 + y 2 + f 2 < c2 .
2
Die neue Gleichung ergibt beim Ausmultiplizieren
(x + f )(x − f ))2 + y 2 ((x + f )2 + (x − f )2 ) + y 4
1
= c4 − c2 (x2 + y 2 + f 2 ) + x4 + y 4 + f 4 + 2(x2 y 2 + x2 f 2 + y 2 f 2 ),
4
bzw.
1
c2 (x2 + y 2 + f 2 ) = c4 + 4x2 f 2 .
4
(7.1)
118
Bilinearformen und Kegelschnitte
In einer weiteren Umformung ergibt sich nun
x2
y2
1
1
= ,
(c2 − 4f 2 )x2 + c2 y 2 = c2 (c2 − 4f 2 ) bzw. 2 + 2
2
4
c
c − 4f
4
also genau die Ellipsengleichung gemäß der Hauptachsentransformation. Ist diese Gleichung
erfüllt, so gilt weiter
1
f2
x2 + y 2 + f 2 = x2 + (c2 − 4f 2 ) − x2 + 4 2 x2 + f 2
4
c
2
2
f
f
1
1
1
1
= c2 + 4 2 x 2 ≤ c2 + 2 c2 = c2 + f 2 ≤ c2 ,
4
c
4
c
4
2
d.h. die Bedingung (7.1) ist automatisch erfüllt.
p
c2 − 4f 2
c
Setzt man nun abschließend a := und b :=
, so erhält man die Ellipsengleichung
2
2
in Normalform
x2 y 2
+ 2 = 1.
a2
b
Mit analogen Rechnungen sieht man ein, dass die Normalform der Hyperbel gegeben ist durch
x2 y 2
− 2 = 1.
a2
b
Damit können wir das Beispiel 7.1.9 auch geometrisch einordnen.
Für eine Parabel mit Brennpunkt F = (f, 0) und Leitgerade x = −f erhält man ebenso die
Gleichung
y 2 = 4f x.
Wir formulieren für diese speziellen Gleichungen noch die zugehörigen Abstandsformeln:
7.2.15 Lemma
1. Es sei P := (x; y) ein Punkt auf der Ellipse E :
Brennpunkten F1 := (−f ; 0) und F2 := (f ; 0). Dann gelten
|P F1 | = a +
xf
a
und |P F2 | = a −
x2
a2
+
y2
b2
= 1 mit den
xf
.
a
2. Es sei P := (x; y) ein Punkt auf der Parabel K : y 2 = 4f x mit Brennpunkt F := (f ; 0)
und Leitgeraden x = −f . Dann gilt
|P F | = x + f.
Beweis
1. Offenbar hat man die Beziehung f 2 = a2 − b2 . Damit gilt etwa für |P F1 | die Gleichung
|P F1 |2 = (x + f )2 + y 2 = x2 + 2xf + a2 − b2 + y 2
b2
f 2 x2
= x + 2xf + a − 2 x2 = a2 + 2xf + 2 =
a
a
2
2
woraus man die Behauptung abliest.
2
fx
a+
,
a
7.2 Kegelschnitte
119
2. Dies ist mehr oder weniger die Definition der Parabel.
7.2.16 Definition Es sei f : R2 → R eine (stetig differenzierbare) Funktion. Dann heißt die
Menge Nf := {(x, y) ∈ R2 ; f (x, y) = 0} die Nullstellenmenge von f oder die durch f definierte
ebene Kurve. Eine injektive Abbildung s : I → R2 für ein Intervall I ⊂ R mit s(I) = Nf heißt
Parametrisierung von Nf . Eine solche Parametrisierung heißt glatt, falls s stetig differenzierbar
ist und s0 (t) 6= 0 für alle t ∈ I gilt.
2
2
7.2.17 Beispiel
1. Es sei E := Nf für f (x, y) := xa2 + yb2 − 1 eine Ellipse. Dann ist durch
s : [0, 2π[→ R2 , t 7→ (a cos(t), b sin(t)) eine glatte Parametrisierung von E gegeben.
2
2
2. Es sei H : xa2 − yb2 = 1 eine Hyperbel. Dann ist s : R → R2 , t 7→ (a cosh(t), b sinh(t)) eine
glatte Parametrisierung von E.
2
t
3. Es sei K : y 2 = 4f x eine Parabel. Dann ist s : R → R2 , t 7→ ( 4f
, t) eine glatte Parametrisierung von K.
Den Beweis dieser Beispiele überlassen wir dem Leser als Übungsaufgabe.
Mit Hilfe der letzten Ergebnisse lassen sich die bekannten fundamentalen Reflexionseigenschaften der Kegelschnitte recht einfach überprüfen.
7.2.18 Definition Es seien s : R → R2 eine glatte Parametrisierung einer ebenen Kurve K
sowie P := s(t0 ) ∈ K. Dann heißt s0 (t0 ) ein Tangentialvektor von K in P . Ein Vektor n mit
hn, s0 (t0 )i = 0 heißt ein Normalenvektor von K in P .
2
2
7.2.19 Satz Es sei E : xa2 + yb2 = 1 eine Ellipse mit den Brennpunkten F1 := (−f ; 0) und
F2 := (f ; 0) und P ein Punkt auf der Ellipse, sowie nP ein Normalenvektor der Ellipse in P .
Dann gilt
∠(nP , P F1 ) = ∠(nP , P F2 ).
Beweis Es sei (x(t), y(t)) eine stetig differenzierbare Parametrisierung der Ellipse, die nach
Beispiel 7.2.17 existieren. Damit erhält man
x(t) y(t) 2x(t)x0 (t) 2y(t)y 0 (t)
0
0
= 0.
+
= 0 =⇒
(x (t), y (t) ,
,
a2
b2
a2 b 2
Damit ist n(t) := x(t)
, y(t)
ein Normalenvektor der Ellipse in (x(t), y(t)). Die Behauptung
a2
b2
folgt nun aus dem ersten Teil des Lemmas 7.2.15 durch Nachrechnen.
7.2.20 Satz Es sei K : y 2 = 4f x eine Parabel mit Brennpunkt F = (f ; 0) und Leitgerade
x = −f . Weiter sei P := (x; y) ein Punkt auf der Parabel mit Normalenvektor nP sowie
Q := (x + 1, y). Dann gilt
∠(nP , P Q) = ∠(nP , P F ).
120
Bilinearformen und Kegelschnitte
Beweis Es sei wieder (x(t), y(t)) eine stetig differenzierbare Parametrisierung der Parabel.
Dann gilt 2y(t)y 0 (t) − 4f x0 (t) = 0, d.h. n(t) = (−2f, y(t)) ist ein möglicher Normalenvektor.
Damit folgt die Behauptung wieder mit Hilfe von Lemma 7.2.15.
Kapitel 8
Geometrische Topologie und
Transformationsgruppen
In diesem Kapitel gehen wir auf topologische Räume und Transformationen geometrischer und
topologischer Objekte ein. Wir erinnern zunächst an einige topologische Grundlagen.
8.1
Topologie
8.1.1 Definition Ein topologischer Raum (M, O) ist eine Menge M zusammen mit einem
System O von Teilmengen ( offene Mengen“) von M , welches folgende Eigenschaften erfüllt:
”
1. ∅, M ∈ O;
2. O1 , O2 ∈ O =⇒ O1 ∩ O2 ∈ O.
S
3. Ist Oi ∈ O, i ∈ I, dann gilt i∈I Oi ∈ O.
Ein topologischer Raum heißt Hausdorffsch, wenn es zu je zwei Punkten x, y ∈ M offene Mengen
Ox , Oy ∈ O gibt mit x ∈ Ox , y ∈ Oy und Ox ∩ Oy = ∅. Eine Menge A ⊂ M heißt abgeschlossen,
wenn M \ A ∈ O gilt, also das Komplement von A offen ist.
8.1.2 Beispiel Es sei M := Rn und O ⊂ Rn sei offen, falls es zu jedem x ∈ O ein ε > 0 gibt,
sodass
Uε (x) := {z ∈ Rn ; kx − zk < ε} ⊂ O
gilt. Man rechnet schnell nach, dass man damit in der Tat einen topologischen Raum erhält.
Topologische Räume lassen sich vergleichen:
8.1.3 Definition Eine Abbildung f : X → Y zwischen topologischen Räumen heißt stetig,
falls Urbilder offener Mengen wieder offen sind. Ist f bijektiv und stetig und ist auch f −1
stetig, so heißt f ein Homöomorphismus.
122
Geometrische Topologie und Transformationsgruppen
8.1.4 Bemerkung Es ist leicht zu zeigen, dass im Fall des Beispiels 8.1.2 die in 8.1.3 gegebene
Definition mit der klassischen metrischen Definition übereinstimmt.
Im Folgenden geben wir eine klassische Konstruktion an, wie man aus bekannten topologischen
Räumen neue topologische Räume erhalten kann.
8.1.5 Definition Es sei X ein topologischer Raum und R eine Äquivalenzrelation auf X. Weiter bezeichne man mit X/R den Raum der Äquivalenzklassen und π : X → X/R die kanonische
Abbildung. Eine Teilmenge O ⊂ X/R heiße offen, falls ihr Urbild π −1 (O) ⊂ X offen ist. Den
so erhaltenen topologischen Raum bezeichnet man als den topologischen Quotient von X nach
R und die Topologie auf X/R heißt Quotiententopologie.
8.1.6 Bemerkung Die Quotiententopologie auf X/R ist die gröbste Topologie, sodass die
Quotientenabbildung stetig ist.
Der topologische Quotient besitzt eine gewisse universelle Eigenschaft:
8.1.7 Lemma Es seien X und Y topologische Räume und R eine Äquivalenzrelation auf X.
Weiter sei f : X → Y stetig mit f (x) = f (y), falls x ∼ y. Dann gibt es genau eine stetige
Abbildung f¯: X/R → Y mit f = f¯ ◦ π.
Beweis Man definiere f¯([x]) := f (x), wobei x ein Repräsentant für die Äquivalenzklasse [x]
ist. Dies ist wohldefiniert, da für y ∼ x nach Voraussetzung f (x) = f (y) gilt. Es bleibt die
Stetigkeit von f¯ zu zeigen. Dazu sei O ⊂ Y offen. Dann ist auch
π −1 f¯−1 (O) = f −1 (O) ⊂ X
wegen der Stetigkeit von f offen. Nach Definition der Quotiententopologie ist dann auch
f¯−1 (O) ⊂ X/R offen, also f¯ stetig.
Man beachte, dass die Quotiententopologie oftmals uns vertraute Vorstellungen verletzt.
8.1.8 Beispiel Auf R sei die Äquivalenzrelation x ∼ y definiert durch x = ay für ein a ∈
R \ {0}. Dann besteht der Quotientenraum aus zwei Punkten [0] und [1], wobei [1] ein offener
Punkt ist, [0] jedoch nicht!
8.2
Gruppenoperationen
In diesem Abschnitt wiederholen wir die wichtigsten Grundlagen zu Gruppenoperationen auf
topologischen Räumen.
Eine Gruppe ist bekanntlich eine Menge zusammen mit einer assoziativen Verknüpfung mit
neutralem Element, sodass zu jedem Element ein inverses Element existiert.
8.2.1 Beispiel Es sei X eine Menge. Unter Bij(X) verstehen wir die bijektiven Selbstabbildungen von X. Diese bilden bzgl. der Verkettung von Abbildungen eine Gruppe.
8.2 Gruppenoperationen
123
8.2.2 Definition Es sei G eine Gruppe und X eine Menge. Eine Gruppenoperation von G auf
X ist ein Gruppenhomomorphismus ψ : G → Bij(X).
Gruppenoperationen sind also spezielle Abbildungen G × X → X. Wir werden uns fast ausschließlich auf Operationen beschränken, bei denen die Gruppenelemente als Homöomorphismen operieren.
8.2.3 Bemerkung Ist ψ : G → Bij(X) eine Gruppenoperation, so schreiben wir für g ∈ G und
x in X meist einfach gx anstatt ψ(g)(x). Dann gilt für eine Gruppenoperation gerade(gh)x =
g(hx) für alle g, h ∈ G und x ∈ X sowie ex = x für das Neutralelement e ∈ G.
8.2.4 Definition Es sei ψ : G → Bij(X) eine Gruppenoperation. Dann heißt die Operation
1. transitiv, falls zu jedem x, y ∈ X ein g ∈ G existiert mit gx = y,
2. effektiv, falls ψ injektiv ist.
8.2.5 Beispiel Es sei X := Rn und G := GLn (R). Dann operiert G auf X vermöge der üblichen
Gruppenoperation. Diese Operation ist transitiv und effektiv. Offenbar operiert damit auch jede
Untergruppe von G auf X. Die Untersuchung derartiger Untergruppen wird das Hauptziel der
folgenden Betrachtungen sein.
Operiert G auf X, so wird durch x ∼ y genau dann, wenn es ein g in G gibt mit y = gx, eine
Äquivalenzrelation auf X definiert. Man nennt
Gx := [x] := {y ∈ X; ∃g ∈ G y = gx}
die Bahn von x unter dieser Operation.
8.2.6 Lemma Es seien X ein topoglogischer Raum und ψ : G → Bij(X) eine Gruppenoperation, sodass für jedes g ∈ G das Bild ψ(g) ein Homöomorphismus von X ist. Dann ist die
Quotientenabbildung
π : X → X/G
offen, d.h. Bilder offener Mengen sind offen.
Beweis
Es sei O ⊂ X offen. Dann ist
[
π −1 (π(O)) = GO := [O] :=
gO = {x ∈ X; ex. g ∈ G, y ∈ O x = gy}
g∈G
als Vereinigung offener Mengen selbst offen. Nach Definition der Quotiententopologie ist dann
auch π(O) offen.
8.2.7 Lemma Ist Iso(x) := Gx := {g ∈ G; gx = x} die sogenannte Isotropiegruppe von X, so
ist
G/Iso(x) → Gx, hIso(x) 7→ hx
bijektiv.
124
Geometrische Topologie und Transformationsgruppen
Beweis Zunächst ist zu zeigen, dass die angegebene Abbildung wohldefiniert ist. Gilt h−1
1 h2 ∈
Iso(x), so gilt h−1
h
x
=
x,
also
h
x
=
h
x.
Weiter
ist
sie
injektiv,
da
aus
h
x
=
h
x
sofort
2
1
2
1
2
1
−1
h h2 ∈ Iso(x) folgt. Die Surjekivität ist klar.
8.3
Mannigfaltigkeiten
In diesem Abschnitt definieren wir Mannigfaltigkeiten und geben eine Beweisskizze für den
Klassifikationssatz kompakter zweidimensionaler Flächen.
8.3.1 Definition Es sei X ein zusammenhängender Hausdorffscher topologischer Raum sowie
n ∈ N. Man nennt X eine n-dimensionale Mannigfaltigkeit, falls es zu jedem Punkt x ∈ X eine
Umgebung x ∈ U ⊂ X gibt, die homöomorph zur offenen Einheitskugel Uε (1) ⊂ Rn ist.
Ist X kompakt und gilt n = 2, so heißt X eine kompakte reelle Fläche.
8.3.2 Beispiel
1. Es sei G := Z2 und die Operation von G auf X := R2 definiert durch
G × X → X,
((m1 , m2 ), (x, y)) 7→ (x1 + m1 , y1 + m2 ).
Dann ist T := X/G eine kompakte reelle Fläche, die man als Torus bezeichnet. Anschaulich entspricht X/G einem Rettungsring, bzw. einem Donut.
2. Für n ≥ 1 sei X := Rn+1 \ {0} sowie G := R∗ := R \ {0} und
G × X → X,
(g, (x1 , . . . , xn+1 )) 7→ (gx1 , . . . , gxn+1 ).
Dann ist X/G eine kompakte n-dimensionale reelle Mannigfaltigkeit, der so genannte
projektive Raum RPn .
Man beachte, dass im Fall n = 2 der Raum RP2 gerade die projektive oder elliptische Ebene
P2 aus 4.2.28 ist.
Beweis
1. Dies überlassen wir dem Leser als Übung.
2. Es seien π : X → X/G die Quotientenabbildung,
bi := {x = (x1 , . . . , xn+1 ) ∈ Rn+1 ; xi = 1} ∼
U
= Rn ,
bi ).
1 ≤ i ≤ n + 1, und Ui := π(U
Dann ist wegen π −1 (Ui ) = {x ∈ Rn+1 ; xi 6= 0} die Menge Ui offen in RPn . Weiter sei
[x] := π(x) ∈ RPn mit x = (x1 , . . . , xn+1 ) ∈ X. Dann gibt es ein 1 ≤ i ≤ n + 1 mit xi 6= 0.
Offenbar gilt
xn+1
x1
bi , also π(y) = [x] ∈ Ui .
,...,
∈U
y :=
xi
xi
8.3 Mannigfaltigkeiten
125
Damit sieht man, dass RPn =
S
Ui gilt. Weiter ist die Einschränkung
bi → Ui
π|Ubi : U
stetig und bijektiv. Aufgrund Lemma 8.2.6 ist π und damit auch π|Ubi eine offene Abbildung, d.h. auch (π|Ub )−1 ist stetig, somit ist π|Ubi ein Homöomorphismus. Daher ist RPn
eine Mannigfaltigkeit. Schließlich ist RPn wegen π(S n ) = RPn kompakt.
Im Folgenden wollen wir die kompakten reellen Flächen genauer studieren. Diese lassen sich
durch so genannte Flächenpolygone gut beschreiben: Unter einem Flächenpolygon versteht man
ein Polygon mit 2m Ecken und 2m Kanten, bei dem jede Kante eine Orientierung besitzt und
je zwei Kanten mit dem selben Symbol bezeichnet werden:
Identifiziert man nun entsprechende Kanten gemäß ihrer Orientierung, so erhält man z.B. im
ersten Fall die Oberfläche der Einheitskugel, die so genannte Einheitssphäre, im zweiten Fall
die projektive Ebene und im letzten Fall den Torus. Man kann diese Flächenpolygone durch
Flächenworte beschreiben:
8.3.3 Definition Ein Flächenwort ist eine Abfolge von 2n Buchstaben, bei der jeder Buchstabe
mindestens zweimal auftritt und jeder Buchstabe durch eine Orientierung gekennzeichnet ist.
8.3.4 Beispiel Die Flächenworte aa−1 , aa und aba−1 b−1 beschreiben die Sphäre, die projektive
Ebene sowie den Torus.
Im Folgenden stellen wir eine Methode vor, wie man aus gegebenen Flächen neue erhalten kann:
8.3.5 Definition Es seien X und Y Flächen, AX ⊂ X und AY ⊂ Y zur Einheitskreisscheibe
homöomorphe Teilmengen sowie ψ : ∂AX → ∂AY ein Homöomorphismus. Weiter sei auf
◦
◦
Z := (X \ AX ) ∪ (Y \ AY )
eine Äquivalenzrelation durch x ∼ ψ(x) erklärt. Dann versteht man unter der topologischen
Summe X]Y von X und Y bzgl. ψ den Raum Z/ ∼.
126
Geometrische Topologie und Transformationsgruppen
Anschaulich werden aus X und Y also jeweils zwei Kreisscheiben entfernt und die verbliebenden
Räume längs der durch das Entfernen entstandenen Ränder miteinander verklebt.
8.3.6 Bemerkung Es sei X eine topologische Fläche und Y die Einheitssphäre, so gilt
X]Y ∼
= X.
8.3.7 Aufgabe Die topologischen Summen von n Tori bzw. von n projektiven Ebenen lassen
sich durch die Flächenworte
−1 −1
−1
a1 b1 a−1
1 b1 . . . an bn an bn
bzw.
a1 a1 . . . an an
beschreiben.
Wir wollen im Folgenden zeigen, dass jede kompakte Fläche entweder homöomorph zur Sphäre
oder zu einer der in Aufgabe 8.3.7 dargestellten Flächen ist. Dabei geben wir eher eine informelle
Beweisskizze und überlassen die Details dem Leser. Wir folgen an dieser Stelle der Darstellung
aus W. Massey (vgl. [33]).
8.3.8 Definition Es sei X eine kompakte reelle Fläche. Ein Simplex in X ist eine Einbettung
des zweidimensionalen Standardsimplexes in X. Eine Triangulierung ist eine Zerlegung
[
X=
Si
von X in Simplizes, derart, dass Si ∩ Sj Seite“sowohl von Si als auch Sj ist, d.h. es ist Bild
”
einer Seite des entsprechenden Standardsimplex.
Man kann zeigen, dass jede kompakte reelle Fläche triangulierbar ist (Satz von Rado, vgl. ??).
Diese Tatsache werden wir im Folgenden stillschweigend verwenden.
8.3.9 Lemma Es sei X eine reelle kompakte (triangulierbare) Fläche. Dann gibt es ein Polygon
P , sodass X aus P durch Identifikation geeigneter Kanten von P entsteht.
Beweis Es sei eine Triangulierung S von X gegeben. Wir führen Induktion nach der Anzahl
von Simplizes in S. Dazu schreiben wir S = T1 , . . . , Tn sodass, jedes Dreieck“ Ti mit min”
destens einem Dreieck Tj , 1 ≤ j ≤ i − 1 eine Ecke gemeinsam hat. Dies ist möglich, da X
zusammenhängend ist.
Für n = 1 ist offenbar nichts zu zeigen. Im Fall n > 1 erfüllt nach Induktionsvoraussetzung
die durch S := {T1 , . . . , Tn−1 } definierte Teilfläche die Behauptung. Es sei P 0 das zugehörige
Polygon und Tn0 ∼
= Tn ⊂ R2 das zu Tn homöomorphe Dreieck. Verklebt man nun P 0 und Tn
entsprechend der Triangulierung S, so erhält man ein Polygon P , aus dem X durch Verkleben
geeigneter Kanten entsteht.
Wir brauchen nun einige Umformungsregeln für Flächenpolygone und -worte:
8.3.10 Lemma Es seien P ein Flächenpolygon sowie E die Menge der Ecken von P . Nennt
man zwei Ecken äquivalent, wenn sie beim Verkleben identifiziert werden, so sei [E] die Menge
der zugehörigen Äquivalenzklassen. Dann gibt es ein Flächenpolygon P 0 mit nur einer Äquivalenzklasse von Ecken, sodass die zugehörigen Flächen XP und XP 0 homöomorph sind.
8.3 Mannigfaltigkeiten
127
Beweis
Einelementige Äquivalenzklassen können nur auftreten, wenn Flächenworte einen
Abschnitt aa−1 enthalten. Diese aufeinanderfolgenden Kanten lassen sich gemäß Bemerkung
8.3.6 eliminieren.
Es seien nun zwei mindestens zweielementige Äquivalenzklassen gegeben. Dann gibt es mindestens eine Kante, die zwei nicht äquivalente Punkte verbindet. Die angrenzenden Kanten sind
dann ebenfalls verschieden, da man sie sonst als Sphäre eliminieren könnte. Dann führen wir
die dargestellte Operation durch:
Dadurch reduzieren wir die Elemente in einer Äquivalenzklasse. Offenbar kann man durch
sukzessives Anwenden dieser Operation sowie die Sphärenelimination ein Flächenpolygon mit
nur einer Äquivalenzklasse erhalten, ohne dass sich der Homöomorphietyp ändert.
8.3.11 Lemma Treten in einem Flächenwort zwei Kanten mit derselben Orientierung auf, so
kann man annehmen, dass diese Kanten aneinander angrenzen.
Beweis
Wir geben die entsprechende Operation wieder grafisch an:
128
Geometrische Topologie und Transformationsgruppen
8.3.12 Lemma Tritt in einem Flächenwort ein Kantenpaar mit verschiedener Orientierung
auf, so gibt es ein weiteres Kantenpaar mit unterschiedlicher Orientierung und wir können
annehmen, dass diese vier Kanten in der Form aba−1 b−1 auftreten.
Beweis Angenommen, es tritt nur ein Kantenpaar in der Form ?a ? a−1 ? auf. Gemäß Lemma
8.3.11 können wir dann annehmen, dass das Flächenwort die Form
x1 x1 . . . xm xm axm+1 xm+1 . . . xk xk a−1 xk+1 xk+1 . . . xn xn
hat mit paarweise verschiedenen xi . Dann werden aber die Endpunkte von a und a−1 nicht
identifiziert im Widerspruch zu Lemma 8.3.10.
Die Aneinanderhängung der vier Kanten stellen wir wieder grafisch da:
8.3.13 Lemma Die topologische Summe eines Torus und einer projektiven Ebene ist homöomorph zur Summe dreier projektiver Ebenen.
Beweis
Diesen Beweis kann man wieder über das entsprechende Flächenwort führen und
wir überlassen ihn dem Leser zur Übung.
Damit können wir nun den Klassifikationssatz für kompakte Flächen beweisen:
8.3.14 Satz Jede kompakte reelle (triangulierbare) Fläche ist entweder homöomorph zu einer
Summe von Tori oder einer Summe projektiver Ebenen.
Beweis
Wegen Lemma 8.3.9 können wir die Fläche durch ein Flächenpolygon und damit
durch ein zugehöriges Flächenwort beschreiben. Aufgrund von Lemma 8.3.11 und von Lemma
8.3.12 können wir annehmen, dass das Flächenwort aus einer Abfolge von Tori und von projektiven Ebenen besteht. Tritt keine Ebene oder kein Torus auf, so sind wir fertig. Wenn beides
auftritt, können wir die Anzahl der Tori aufgrund von Lemma 8.3.13 um eins reduzieren. Damit
folgt die Behauptung induktiv.
8.4 Gruppenoperationen auf dem Rn
8.4
129
Gruppenoperationen auf dem Rn
In diesem Abschnitt beschäftigen wir uns mit einigen allgemeinen Aussagen über Gruppenoperationen auf dem Rn . Unser Hauptaugenmerk liegt dabei auf geometrisch relevanten Gruppen,
wie etwa Untergruppen der GLn (R). Diese operieren kanonisch auf dem Rn und können oftmals
durch diese Operation charakterisiert werden.
Die allgemeinste auf dem Rn operierende Gruppe ist die Gruppe Bij(Rn ) aller bijektiven Selbstabbildungen des Rn . Weitere prinzipiell interessante Gruppen sind
Top(Rn ) := {f : Rn → Rn ; f Homöomorphismus},
Diff(Rn ) := {f : Rn → Rn ; f bijektiv, f, f −1 differenzierbar} ( Diffeomorphismen“),
”
welche Gegestand der Topologie oder der Differentialtopologie (bzw. Differentialgeometrie) sind
und von uns hier nicht weiter untersucht werden sollen. Für uns wichtige Gruppen sind zum
einen die Gruppe der Vektorraumautomorphismen von Rn , die bekanntlich nach Wahl einer
Basis isomorph zur GLn (R) ist und wir im Folgenden damit identifizieren werden, und zum
Anderen die Translationsgruppe T ∼
= Rn , welche auf dem Rn vermöge
T × Rn → Rn , (t, x) 7→ x + t
operiert. Die von diesen in Bij(Rn ) erzeugte Untergruppe ist die Gruppe AGLn (R) der affinen
Transformationen des Rn .
8.4.1 Definition Es sei G eine Gruppe und M ⊂ G eine Teilmenge von G. Dann heißt
\
hM i :=
H
M <H, H UG
die von M in G erzeugte Untergruppe.
Es ist leicht einzusehen, dass hM i in der Tat eine Untergruppe von G ist. Explizit hat man:
8.4.2 Bemerkung In der Notation von 8.4.1 gilt
hM i = {me11 me22 . . . mess ; mi ∈ M, ; ei = ±1}.
Im Fall der affinen Transformationen läßt sich eine einfachere Darstellung finden:
8.4.3 Lemma Jedes f ∈ AGLn (R) lässt sich in der Form f (x) = Ax + b mit A ∈ GLn (R) und
b ∈ Rn darstellen.
Beweis Es genügt zu zeigen, dass die Verkettung einer Translation mit einem Vektorraumautomorphismus von Rn die gewünschte Form hat. Dies ist aber wegen
A(x + t) = Ax + At
130
Geometrische Topologie und Transformationsgruppen
offenbar richtig.
Damit kann man sich im Prinzip auf die Operation von GLn (R) bzw. deren Untergruppen
beschränken. Wichtige derartige Gruppen sind die spezielle lineare Gruppe SLn (R), die orthogonale Gruppe O(n) und die Gruppe der Kongruenzabbildungen (oder Isometrien) des Rn :
8.4.4 Definition Für den Rn mit dem Standardskalarprodukt und der daraus resultierenden
Norm heißt eine geraden- und längentreue Abbildung eine Kongruenzabbildung des Rn .
8.4.5 Bemerkung Wie in 3.3.5 zeigt man, dass jede Kongruenzabbildung f von der Form
f (v) = Av + b
mit A ∈ O(n) und b ∈ Rn ist.
Für die Untersuchung von Gruppenoperationen bildet der Begriff konjugierter Untergruppen
ein wichtiges Hilfsmittel.
8.4.6 Definition Zwei Untergruppen H1 , H2 ⊂ G einer Gruppe G heißen konjugiert in G, falls
es ein Ψ ∈ G gibt mit
H1 = Ψ−1 H2 Ψ.
8.4.7 Bemerkung Offenbar ist Konjugiertheit von Gruppen eine Äquivalenzrelation auf der
Menge der Untergruppen von G.
Im gewissen Sinne operieren zwei konjugierte Untergruppen in analoger Weise, insbesondere
sind konjugierte Gruppen offensichtlich isomorph. Allerdings ist der Begriff der Konjugation
deutlich schärfer.
8.4.8 Lemma
1. Es seien H1 und H2 zwei durch Ψ konjugierte Untergruppen von Bij(Rn );
weiter sei x ein Fixpunkt von H2 , d.h. für alle h ∈ H2 gilt hx = x. Dann ist Ψ−1 (x) ein
Fixpunkt von H1 .
2. Konjugierte Untergruppen einer Gruppe G sind als abstrakte Untergruppen isomorph;
die Umkehrung jedoch ist falsch.
Beweis
1. Für jedes h1 ∈ H1 gibt es ein h2 ∈ H2 mit h1 = Ψ−1 h2 Ψ. Dann gilt
h1 (Ψ−1 (x)) = Ψ−1 h2 Ψ(Ψ−1 (x)) = Ψ−1 (x).
2. Den ersten Teil überlassen wir dem Leser als Übung, für den zweiten Teil betrachten wir
die beiden Untergruppen
1 0
C2 := {I2 , −I2 } und Sx := I2 , S :=
0 −1
8.5 Symmetriegruppen von Polytopen
131
von GLn (R), die Drehgruppe um den Winkel π und die Spiegelungsgruppe zur Spiegelung
an der x-Achse. Beide sind offenbar isomorph, da sie beide zyklisch der Ordnung 2 sind.
Wären sie (in GLn (R)) konjugiert, so gäbe es eine Matrix Ψ mit Ψ−1 SΨ = −I2 . Anwenden
der Determinante liefert −1 = 1, einen Widerspruch.
Im letzten Beweis liefert der erste Teil auch ein geometrisches Argument für die zweite Aussage:
Die erste Gruppe hat genau einen Fixpunkt, die zweite jedoch unendlich viele. Daher können
sie nach der ersten Aussage nicht konjugiert sein.
Wir zeigen nun noch, dass endliche Untergruppen der Kongruenzgruppe sich immer als Untergruppen der orthogonalen Gruppe auffassen lassen.
8.4.9 Lemma Es sei G eine endliche Untergruppe von GLn (R). Dann hat G einen Fixpunkt.
Beweis
Es sei x ∈ Rn und
p :=
1 X
g(x).
|G| g∈G
Wegen Bemerkung 8.4.3 ist jedes h ∈ G von der Form h(x) = Ax + b. Daher gilt
!
X
1
1 X
1 X
1 X 0
h(p) =
Ag(x) + b =
(Ag(x) + b) =
h(g(x)) =
h (x) = p.
|G| g∈G
|G| g∈G
|G| g∈G
|G| h0 ∈G
8.4.10 Korollar Ist G eine endliche Untergruppe der Kongruenzgruppe von Rn , so ist G konjugiert zu einer Untergruppe von O(n).
Beweis Nach Lemma 8.4.9 hat G einen Fixpunkt p. Es sei Ψ die Translation, die Null auf
p abbildet. Dann hat H := Ψ−1 GΨ wegen Lemma 8.4.8 den Fixpunkt Null und man erhält die
Behauptung.
8.5
Symmetriegruppen von Polytopen
In diesem Abschnitt gehen wir auf den Spezialfall der Symmetriegruppen von regelmäßigen
Polytopen ein. Zunächst beschränken wir uns auf die Ebene, d.h. auf die Symmetrien eines
regelmäßigen Polygons.
8.5.1 Definition Es sei P ein regelmäßiges Polygon mit n Ecken (kurz: n-Polygon). Dann
heißt die Menge der Kongruenzabbildungen des R2 , welche P in sich selbst überführen, die
Symmetriegruppe oder Diedergruppe von P und wird mit Dn bezeichnet.
132
Geometrische Topologie und Transformationsgruppen
Offenbar sind die Diedergruppen zweier n-Polygone isomorph, sogar konjugiert. Daher macht
es Sinn, von der Diedergruppe Dn zu sprechen.
8.5.2 Beispiel Wir identifizieren R2 mit C. Weiter sei
En := {ζ ∈ C; ζ n = 1}
die Menge der n-ten Einheitswurzeln. Dann ist P := conv(En ) ein n-Polygon.
1. Für jedes ζ ∈ En ist die Multiplikation mit ζ ein Element von Dn .
2. Die Spiegelung
σx : z 7→ z̄
an der reellen Achse ist ein Element von Dn .
8.5.3 Satz Die Diedergruppe Dn hat genau 2n Elemente und wird von zwei Elementen erzeugt.
Beweis Wir betrachten die Situation in 8.5.2. Dann ist für jedes ζ ∈ En auch σζ := ζσx ∈ Dn .
Offenbar gilt für ζ 6= ζ 0 auch σζ 6= σζ 0 und daher hat Dn in dieser Situation mindestens die
2n Elemente En ∪ {σζ ; ζ ∈ En } =: D0 und diese Gruppe (Beweis!) wird von einer primitiven
Einheitswurzel ζ und σx erzeugt.
Es bleibt zu zeigen, dass D0 = Dn gilt. Dazu sei nun τ ein beliebiges Element von Dn und
ζ := τ (1) ∈ En . Dann fixiert τ 0 := ζ −1 τ den Punkt 1 ∈ Dn . Wir behaupten, dass dann
τ 0 = id oder τ 0 = σx gilt: Als Kongruenzabbildung können wir annehmen, dass τ 0 entweder
eine Spiegelung oder eine Drehung ist. Es sei ξ ∈ En eine Einheitswurzel, sodass ξ1 eine Kante
¯ Offenbar gilt im ersten Fall
von P ist. Wegen τ 0 (1) = 1 gilt entweder τ 0 (ξ) = ξ oder τ 0 (ξ) = ξ.
0
0
τ = id und im zweiten Fall τ = σx . Dann ist offenbar entweder τ = ζ oder τ = ζσx , liegt also
in D0 .
8.5.4 Aufgabe Man zeige in der Notation von 8.5.2:
1. Es gilt σζ = ξσx ξ −1 , für ξ 2 = ζ (d.h. σζ ist die Spiegelung an der Ursprungsgeraden durch
ξ).
2.
σζ σx = ζ;
daraus folgere man, dass die Gruppe Dn auch von den beiden Spiegelungen σx und σζ , ζ
primitiv, erzeugt wird.
8.5.5 Beispiel
1. Die Diedergruppe D3 eines Dreiecks ist isomorph zur symmetrischen
Gruppe S3 .
2. Die Diedergruppe D4 eines Quadrats ist isomorph zur Untergruppe
h(1234), (12)(34)i ⊂ S4 .
8.6 Untergruppen der speziellen linearen Gruppe
133
Diese Aussage besitzt eine höherdimensionale Verallgemeinerung:
8.5.6 Satz Es sei S ⊂ Rn der reguläre n-dimensionale Standardsimplex. Dann ist die Symmetriegruppe Dn von S isomorph zur symmetrischen Gruppe Sn .
Pn
Beweis
Es seien vi := e√
i , 1 ≤ i ≤ n und vn+1 :=
i=1 xei , wobei x so gewählt ist, dass
kvn+1 − ei k = kek − e` k = 2, k 6= `, gilt. Dann können wir S = conv(vi ; i = 1, . . . , n + 1)
annehmen. Weiter definiern wir für i > j den Vektor ni,j := vi − vj und die Ebene Hi,j durch
1
Hi,j := {x ∈ Rn ; hni,j , xi = hni,j , (vi + vj )i}.
2
Dann gilt für ` 6= i, j offenbar v` ∈ Hi,j und die Spiegelung σi,j an Hi,j bildet vi auf vj ab.
Das Bild der kanonischen Einbettung DS → Sn enthält somit alle Transpositionen. Da diese
Sn erzeugen, folgt die Behauptung.
8.5.7 Aufgabe Man bestimme die Symmetriegruppen der regulären Polyeder aus 6.3.11.
8.6
Untergruppen der speziellen linearen Gruppe
Abschließend betrachten wir noch Untergruppen der
SL2 (R) = {A ∈ GL2 (R); det(A) = 1}.
Die entscheidende Beobachtung zur Untersuchung
a
SL2 (R) → Isoo (H), A =
c
dieser Gruppe ist die Surjektion
az + b
b
7→ z 7→
d
cz + d
(8.1)
dieser Gruppe auf die orientierungstreuen Isometrien Isoo (H) der Hyperbolischen Ebene H (vgl.
Bemerkung 4.3.5, Satz 4.4.3 und Bemerkung 4.5.2), welche bis auf Multiplikation der Matrix
A mit dem Faktor −1 eindeutig ist.
Wir beschränken uns auf zyklische Untergruppen von Isoo (H), d.h. von einer Möbiustransformation erzeugte Gruppen. Um das geometrische Verhalten einer derartigen Transformation besser
az + b
zu verstehen, untersuchen wir die Fixpunkte einer solchen Transformation M (z) :=
mit
cz + d
ad − bc = 1: Offenbar gilt
az + b
= z ⇐⇒ az + b = cz 2 + dz
cz + d
p
a − d ± (a − d)2 + 4bc
a−d
1p
=
±
⇐⇒ z1/2 =
(a + d)2 − 4.
2c
2c
2c
(8.2)
Daher gibt es für a + d = ±2 genau einen Fixpunkt (auf der reellen Achse), für |a + d| > 2 zwei
Fixpunkte auf der reellen Achse sowie im Fall |a + d| < 2 genau einen Fixpunkt in H und einen
in −H.
134
Geometrische Topologie und Transformationsgruppen
8.6.1 Definition Es sei
M (z) :=
az + b
,
cz + d
a, b, c, d ∈ R,
ad − bc = 1,
eine Möbiustransformation. Im Fall a + d = ±2 heißt M parabolisch, im Fall |a + d| > 2
hyperbolisch und im Fall |a + d| < 2 elliptisch.
8.6.2 Lemma Es sei z ∗ ∈ C ein Fixpunkt der Möbiustransformation M , sowie S eine weitere
Möbiustransformation und T := SM S −1 . Dann ist S(z ∗ ) ein Fixpunkt von T und es gilt (für
S(z ∗ ) 6= ∞)
T 0 (S(z ∗ )) = M 0 (z ∗ ).
Beweis Die erste Aussage ist klar (vgl. Lemma 8.4.8). Für die zweite Aussage beachte man
die für beliebiges w ∈ C gültige Gleichung
T 0 (w) = S 0 (M (S −1 (w))) · M 0 (S −1 (w)) ·
1
S 0 (S −1 (w))
.
Durch Einsetzen von z ∗ folgt die Behauptung.
Bekanntlich hat man (vgl. den Beweis von 4.4.9) für eine Möbiustransformation M ∈ Isoo (H)
M 0 (z) =
1
.
(cz + d)2
Im Fall zweier Fixpunkte z1/2 wie in (8.2) gilt
M 0 (z1/2 ) = 4
0
0
2 =⇒ M (z1 ) · M (z2 ) = 1.
p
(a + d) ± (a + d)2 − 4
8.6.3 Korollar Im Fall einer parabolischen Transformation M mit einem Fixpunkt z ∗ gilt
M 0 (z ∗ ) = 1. Hat M zwei Fixpunkte z1/2 , so gilt im hyperbolischen Fall M 0 (z1 ) > 1 und
M 0 (z2 ) < 1 (bzw. umgekehrt) und in der elliptischen Situation |M 0 (zi )| = 1, i = 1, 2.
Wir untersuchen im Folgenden das geometrische Verhalten der drei oben definierten Typen von
Möbiustransformationen:
8.6.4 Lemma Ist M eine parabolische Transfomation, so ist M konjugiert zu z 7→ z + b für
ein geeignetes b in R.
Beweis Nach Definition gibt es genau einen Fixpunkt z ∗ von M . Dann gibt es eine Möbiustransfomation S, die diesen auf ∞ abbildet. Wegen Lemma 8.6.2 ist dann ∞ der einzige
Fixpunkt von T := SM S −1 . Dann ist aber T zwangsläufig von der Form T (z) = z + b, wie man
schnell nachrechnet.
8.6.5 Aufgabe Man zeige: In Isoo (H) ist z 7→ z + b für b > 0 konjugiert zu z 7→ z + 1; in
Iso(H) ist jede Abbildung z 7→ z + b, b 6= 0, konjugiert zu z 7→ z + 1.
8.6 Untergruppen der speziellen linearen Gruppe
135
8.6.6 Lemma Ist M hyperbolisch, so ist M konjugiert zu z 7→ kz mit k > 0.
Beweis Gemäß Lemma 4.4.14 gibt es eine Möbiustransformation S ∈ Isoo (H), die die zwei
reellen Fixpunkte von M auf 0 und ∞ abbildet. Offenbar ist dann die konjugierte Abbildung
T := SM S −1 von der Form T (z) = kz mit k > 0.
Durch Konjugation mit z 7→ − z1 kann man in Lemma 8.6.6 sogar annehmen, dass k > 1 gilt.
8.6.7 Lemma Ist M elliptisch, so gibt es ein t ∈]0, 2π[\{π}, sodass M konjugiert ist zu einer
Abbildung der Form
cos(t)z − sin(t)
z 7→
.
sin(t)z + cos(t)
Beweis Bei einer elliptischen Transformation sind die beiden Fixpunkte z1/2 aus (8.2) konjugiert komplex. Ohne Einschränkung können wir daher annehmen, dass z1 = i und z2 = −i
gilt, also a − d = 0 und 4 − (a + d)2 = 4c2 (vgl. (8.2)). Dies impliziert aber 1 = a2 + c2 und somit
gibt es ein t ∈ [0, 2π[ mit d = a = cos(t) und c = sin(t). Wegen 1 = ad − bc = cos2 (t) − b sin(t)
folgt b = − sin(t) für t 6= 0, π. Offenbar liegt in den beiden übrigen Fällen t = 0 oder t = π
aber eine parabolische Transformation (bzw. die Identität) vor.
Umgekehrt rechnet man schnell nach, dass die angebene Form in der Tat eine elliptische Transformation ist. Da in (8.1) genau die beiden Matrizen A und −A die gleiche Möbiustransformation liefern und cos(t + π) = − cos(t) und sin(t + π) = − sin(t) gelten, lässt sich das t in Lemma
8.6.7 auch immer in ]0; π[ wählen.
8.6.8 Aufgabe Es seien a, b, c, d ∈ R mit ad − bc = 1 sowie
az + b
a b
A :=
und MA (z) :=
c d
cz + d
die zugehörige Möbiustransformation. Weiter seien λ1 und λ2 die Eigenwerte von A und z1 bzw.
1
z2 die Fixpunkte von MA . Man zeige, dass dann (bis auf Reihenfolge) MA0 (zi ) = 2 gilt.
λi
Als abschließende Folgerung erhalten wir letztendlich eine Spezialfassung des Hauptsatzes über
die Jordansche Normalform für die SL2 (R):
8.6.9 Korollar
a b
A :=
∈ SL2 (R).
c d
Dann ist A in SL2 (R) konjugiert zu einer der folgenden Matrizen:
cos(t) − sin(t)
1 ±1
λ 0
, |λ| > 1,
, t ∈ [0; 2π[, oder ±
.
sin(t) cos(t)
0 1
0 λ1
Literaturverzeichnis
[1] E. A. Abbot: Flächenland, RaBaKa-Publishing, 2009
[2] L. Ahlfors: Complex Analysis, 2. Auflage, Mc. Graw-Hill Book Company, New York,
1966
[3] M. Arendt: Geometrie, Skript für den Unterricht zwischen schriftlichen und mündlichem
Abitur, HGS Singen 2011
[4] I. Agricola, T. Friedrich: Elementargeometrie, 3. Auflage, Vieweg+Teubner 2011
[5] L. M. Batten, A. Beutelspacher: The Theory of Finite Linear Spaces, Cambridge University Press, 1993
[6] A. F. Beardon: Iteration of rational functions, Springer-Verlag 1991
[7] A. F. Beardon: The Geometry of Discrete Groups, Springer-Verlag New York Heidelberg
Berlin, 1983
[8] R. Benedetti, C. Petronio: Lectures on Hyperbolic Geometry, Springer-Verlag, Berlin
Heidelberg New York 1992
[9] H. Behnke, F. Sommer: Theorie der analytischen Funktionen einer komplexen Veränderlichen, 3. Auflage, Springer-Verlag, Berlin Heidelberg New York, 1965
[10] A. Beutelspacher, U. Rosenbaum: Projektive Geometrie, 2. Auflage, Vieweg Verlag,
Wiesbaden, 2004
[11] H.-G. Bigalke: Kugelgeometrie, Otto Salle Verlag 1984
[12] O. Blumenthal: Lebensgeschichte in D. Hilbert. Gesammelte Abhandlungen“, Band 3,
”
Julius Springer, Berlin 1935, Seite 403
[13] C. Boyer, U. Merzbach: A History of Mathematics, 2. Auflage, John Wiley & Sons, New
York Singapore 1989
[14] A. Brøndsted: An Introduction to Convex Polytopes, Springer Verlag, New York Heidelberg Berlin, 1983
[15] D. Burger: Silvestergespräche eines Sechsecks, 9. Auflage, Aulis Verlag Deubner, Köln,
2006
LITERATURVERZEICHNIS
137
[16] R. Diestel: Graphentheorie, 3. Auflage, Springer Verlag, Berlin Heidelberg, 2006
[17] B. Grünbaum, V. Kaibel: Convex Polytopes, 2. Auflage, Springer-Verlag, New York
Berlin Heidelberg, 2003
[18] H. S. M. Coxeter: Introduction to geometry, Verlag Wiley New York 1969
[19] Euclides: Die Elemente, Wiss. Buchges., Sonderausgabe 8, Darmstadt 1991
[20] G. Fischer: Lineare Algebra, 11. Auflage, Vieweg Verlag 1997
[21] E. Freitag, R. Busam: Funktionentheorie, Springer-Verlag Berlin Heidelberg New York,
1993
[22] R. Fritsch, G. Fritsch: Der Vierfarbensatz, BI-Wissenschaftsverlag, Mannheim Leipzig
Wien Zürich, 1994
[23] D. Gans: An Introduction to Non-Euclidean Geometry Academic Press, New York and
London 1973
[24] R. Harthshorne: Geometry: Euclid and beyond, Springer-Verlag New York 2000
[25] H. Heuser: Lehrbuch der Analysis, Teil 2, 5. Auflage, B. G. Teubner Stuttgart 1990
[26] D. Hilbert: Grundlagen der Geometrie, 4. Auflage, B.G. Teubner, Leipzig Berlin 1913
[27] D. Hilbert: Grundlagen der Geometrie, 11. Auflage, B.G. Teubner, Stuttgart 1972
[28] B. Iversen: Hyperbolic Geometry, Cambridge University Press, Cambridge 1992
[29] F. Klein: Vorlesungen über nicht-euklidische Geometrie, Verlag von Julius Springer Berlin 1928 (Nachdruck 1968)
[30] B. Klotzek: Elementare euklidische und nicht euklidische Geometrien, Deutsch-Verlag,
2001
[31] H. Knörrer: Geometrie: Ein Lehrbuch für Mathematik- und Physikstudierende, Friedr.
Vieweg & Sohn Verlag, Wiesbaden 2006
[32] G. Kowol: Projektive Geometrie und Cayley-Klein Geometrien der Ebene, Birkhäuser
Verlag, Basel-Boston-Berlin 2009
[33] W. S. Massey: Algebraic Topology: An Introduction, Springer-Verlag, New York Heidelberg Berlin, 1967
[34] S. Müller-Philipp, H.-J. Gorski: Leitfaden Geometrie, 5. Auflage, Vieweg+Teubner,
Wiesbaden 2012
[35] J. Richter-Gebert: Perspectives on projective geometry, Springer-Verlag Berlin Heidelberg 2011
138
LITERATURVERZEICHNIS
[36] J. Richter-Gebert, T. Orendt: Geometriekalküle, Springer-Verlag, Heidelberg London
New York 2009
[37] E. M. Schröder: Vorlesungen über Geometrie, Band 1, BI Wissenschaftsverlag, Mannheim Wien Zürich 1991
[38] R. Stanley: The Number of Faces of a Simplicial Convex Polytope, Advances in Mat.
35, 236-238 (1980)
[39] T. tom Dieck: Topologie, 2. Auflage, de Gruyter, Berlin New York, 2000
[40] M. Winter (Hrsg.): Theorema Pythagoricum, Vechtaer fachdidaktische Forschungen und
Berichte, Heft 12, 2005
[41] G. M. Ziegler: Lectures on Polytopes, Springer Verlag, New York 1995 (Corrected second
printing, 1998)