Theoretische Mechanik Lösen Sie die newtonsche
Werbung

Sommersemester 2017
Prof. Dr. R. Ketzmerick/Dr. R. Schumann
Technische Universität Dresden
Institut für Theoretische Physik
Theoretische Mechanik
3. Übung Lösungen
3.1 Spezielle Kraftgesetze
Lösen Sie die newtonsche Bewegungsgleichung für folgendes Kraftgesetz
F~ = ae−γt~ex − by~ey − cż~ez ,
mit den Anfangsbedingungen ~r0 = ~0, ~v0 = v0y~ey + v0z~ez , wobei a, b, c und
γ positive Konstanten seien.
Aus dem newtonschen Grundgesetz erhält man drei nicht gekoppelte
DGL, so daß die Bewegung in alle drei Raumrichtungen unabhängig voneinander betrachtet werden kann.
x-Richtung: Hier liegt der Fall Fx = Fx (t) vor, der durch direkte
Integration gelöst wird.
mẍ = ae−γt
mit den AB
x(0) = 0 und ẋ(0) = 0 .
Durch zweimalige Integration findet man zunächst
a −γt
x(t) =
e + C1 t + C2 ,
mγ 2
was bei Berücksichtigung der AB zur Lösung
a −γt
a
a
x(t) =
e
+
t
−
mγ 2
mγ
mγ 2
führt.
y-Richtung: Hier liegt der Fall Fy = Fy (y) vor, den man durch die
“Energiemethode” löst.
mÿ = −by
mit den AB
y(0) = 0 und ẏ(0) = v0y .
Multiplikation mit ẏ führt zu
mẏ ÿ = −by ẏ
=⇒
d mẏ 2
d by 2
=−
dt 2
dt 2
1
=⇒
mẏ 2 by 2
+
= C3 .
2
2
Die Konstante C3 bestimmt sich aus den AB zu
2
mv0y
.
C3 =
2
Indem man nach ẏ auflöst
q
2 − ω2y2
ẏ = ± v0y
ω 2 :=
mit
b
m
und die Variablen trennt
dy
p
= ωdt
y02 − y 2
y02
mit
2
2
v0y
mv0y
:= 2 =
.
ω
b
Unbestimmte Integration, wobei es ausreicht, sich auf das positive Vorzeichen zu beschränken, liefert mit der Substitution y = y0 sin ϕ
ϕ + C4 = ωt
=⇒
y(t) = y0 sin (ωt − C4) .
Die Integrationskonstante hat die Bedeutung des Phasenwinkels und
wird aus den AB zu C4 = 0 bestimmt.
z-Richtung: Hier liegt der Fall Fz = Fz (ż) vor, der durch Substitution
u = ż auf eine DGL 1.Ordnung zurückgeführt wird, die durch TdV
gelöst wird:
mz̈ = −cż
mu̇ = −cu
mit den AB
=⇒
z(0) = 0 und ż(0) = v0z .
du
c
= − dt
u
m
=⇒
ln
u
c
= − t.
C5
m
Indem man die Anfangsbedingung für ż einsetzt, erhält man
c
ż = v0z e−Γt
mit
Γ= ,
m
woraus sich nach nochmaliger Integration
v0z
z(t) = − e−Γt + C6
Γ
ergibt. Indem man noch die AB für z(0) verwendet, erhält man
v0z
1 − e−Γt .
z(t) =
Γ
Für die Bahnkurve ergibt sich schließlich
v0z
a
−γt
−Γt
~ez
e
+
γt
−
1
~
e
+
y
sin
(ωt)
~
e
+
1
−
e
~r(t) =
x
0
y
mγ 2
Γ
2
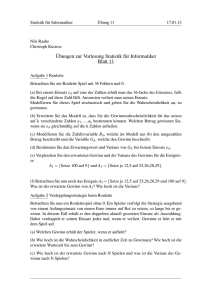
Wie sieht die Bewegung nach sehr langen Zeiten aus?
Für große Zeiten sind die Exponentialfunktionen abgeklungen und es
bleibt eine ebene Bewegung in der Fläche z = mvc0z übrig. Diese setzt
sich aus einer gleichförmigen Bewegung in x-Richtung und einer Oszillation in y-Richtung zusammen.
1.0
0.5
y
y0
0.0
-0.5
-1.0
4
z
y0
2
0
2.0
1.5
1.0
x
y0
0.5
0.0
Bahnkurve für geignet gewählte Parameter.
3
3.2 Bewegung im Phasenraum
Ein Körper der Masse m bewegt sich eindimensional mit der Energie E im
Potential
V (x) = −a · x2 + b · x4
a, b > 0
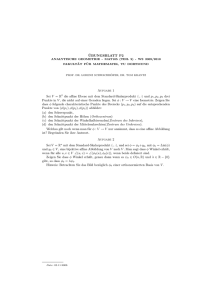
a) Diskutieren Sie qualitativ den Bewegungsablauf für verschiedene Energien (Skizze!)!
bei E3: Geschlossene Bewegung zwischen zwei Umkehrpunkten.
bei E2: Geschlossene Bewegung auf der Separatrix . Die
Schwingungsdauer divergiert.
bei E1: Das System befindet sich entweder links, oder
rechts und führt dort eine
geschlossene Bewegung zwischen zwei Umkehrpunkten
aus.
bei E0 : Das System befindet
sich im Grundzustand, wobei
es entweder links oder rechts
im Potentialminimum ruht.
Π
1.0
0.5
-1.0
0.5
-0.5
Ξ
1.0
-0.5
-1.0
4
b) Bestimmen Sie den Impuls p (x) = mv̇(x) in Abhängigkeit vom Ort
und stellen Sie p (x) in einem p − x - Diagramm grafisch dar. Gehen
Sie dabei zu dimensionslosen Größen über, indem Sie den Impuls, den
Ort und die Energie in Einheiten messen, die in geeigneter Weise aus
den Konstanten a, b und m gebildet werden.
Indem man b·x4 im Potential ausklammert, findet
daß die Dimenpman,
a
2
sion von a/b gerade m ist, so daß man mit x0 = b eine Längeneinheit
gewinnt.
2
a
x
V (x) = b · x4 1 − 2 =: b · x4 1 − 20
bx
x
4
2
2
4
x
x
x
x
0
0
= bx40 4 1 − 2 := V0 4 1 − 2
x0
x
x0
x
2
Mit V0 = ab wurde eine Energieeinheit eingeführt, aus der man durch
Multiplikation mit der Masse eine Impulseinheit erhält:
r
p20
a2
2m
:= V0 =
=⇒
p0 =
a.
2m
b
b
Für die Energie des Systems findet man damit
ε = π2 − ξ 2 + ξ 4
mit ε :=
x
x0
E
,
V0
ξ :=
m x0 dξ
dξ
=:
p0 dt
dτ
und π :=
p
p0
Schließlich führt man noch über
p
m dx m x0 d
π =
=
=
p0
p0 dt
p0 dt
x
x0
=
die dimensionslose Zeit
t
τ =
t0
mit
t0 =
r
m
2a
ein.
c) Bestimmen Sie x(t) für die Bewegung des Köpers für den Fall E = 0.
Hinweis:
R
dx √ 1
x
1−x2
= ln
1+
√x
1−x2
Zunächst erhält man durch Trennung der Variablen
π =
p
dξ
= ± ξ2 − ξ4
dτ
dξ
=⇒
−
5
p
ξ2 − ξ4
=
dξ
dξ
p
= p
=d
−|ξ| 1 − ξ 2
ξ 1 − ξ2
wobei man sich auf negative Orte beschränkt hat und der geeignete
Zweig der Phasenraumkurve (der mit π > 0) ausgewählt wurde. Als
nächstes wird diese Gleichung integriert
Z ξ
Z τ
dξ ′
p
−
dτ ′
=
ξu ξ ′ 1 − ξ ′2
τu
Zξ
ξu
′
dξ
p
=
ξ ′ 1 − ξ ′2
Zτ
dτ ′ ,
τu
wobei ξu die Koordinate des Umkehrpunktes und τu der zugehörige
Zeitpunkt ist. Ohne Beschränkung der Allgemeinheit kann man τu =
0 wählen. ξu bestimmt sich aus der Bedingung π(τu ) = 0 zu ξu ∈
{−1, 0, +1}, wobei für den hier ausgewählten Zweig -1 zu nehmen ist.
Zξ
−1
dξ ′
−ξ
p
p
= ln
=τ
ξ ′ 1 − ξ ′2
1 + 1 − ξ2
Nach Auflösung der Gleichung erhält man
1
x0
ξ = −
=⇒
x(t) = −
cosh τ
cosh tt0
d) Leiten Sie aus dem Energiesatz eine Integralformel für die Zeit T (E),
die der Körper für seine Bewegung zwischen den Umkehrpunkten benötigt,
her!
An den Umkehrpunkten ist der Impuls Null. Man erhält als reelle
Lösungen der biquadratischen Gleichung im Bereich −1/4 < ε < 0
r
r
q
q
1
1
1
ξu,1 = − 2 + 4 + ε
ξu,2 = − 2 − 14 + ε
r
r
q
q
1
1
1
ξu,3 = 2 − 4 + ε
ξu,4 = 2 + 14 + ε ,
und im Bereich ε > 0 die beiden Lösungen
r
r
q
ξu,1 = −
1
2
+
1
4
+ε
ξu,2 =
1
2
+
q
Zτu,2
Zξu,2
p
T = t0 dτ ′ = t0 (τu,2 − τu,1) = t0
τu,1
ξu,1
6
1
4
+ε.
dξ ′
ε + ξ 2 − ξ ′4
e) Wie groß ist die Schwingungsdauer bei E0 = −a2 /(4b)?
Bei E0 = −a2 /(4b), d.h. ε = −1/4 befindet sich das Teilchen in einem
der beiden Potentialminima.
Berechnen Sie T (E0 + δE) näherungsweise für Energien die nur wenig
größer als E0 sind!
Für geringe Auslenkungen aus der Ruhelage setzt man
1
ε = − + δE
4
und
1
ξ = √ + δx ,
2
womit sich unter Weglassen von Termen, die in dritter Ordnung klein
sind, näherungsweise
δE = δ̇x2 + 2δx2
ergibt. Man sieht also, daß das System harmonische Schwingungen um
die Ruhelage ausführt:
r
√
δE
δx =
2τ + C .
cos
2
q
1
√
Wählt man wieder ξ(t = 0) = ξu,1 = 2 − δ2E ergibt sich schließlich
δx = −
r
√ δE
cos
2τ
2
=⇒
7
2π
T = √ t0 .
2
3.3 Fall mit Reibung
Der freie Fall eines Körpers, der als Massepunkt betrachtet werde, erfolgt
unter dem Einfluss der Gewichtskraft F~G und der Luftreibungskraft, die
über
F~L = −~v · (β + γ · |~v |) ,
β, γ > 0, konst.
von der Geschwindigkeit ~v des Körpers abhängt.
a) Formulieren Sie die newtonsche Bewegungsgleichung in koordinatenfreier Darstellung.
m~v˙ = −β~v − γv~v + m~g
Welche Differentialgleichungen müssen demnach die Geschwindigkeitskomponenten vj in kartesischen Koordinaten erfüllen (Annahme: Fallbeschleunigung ~g = −g · ~ez ) ?
β
γ
vx + v vx = 0
m
m
γ
β
v̇y + vy + v vy = 0
m
m
γ
β
v̇z + vz + v vz = −g
m
m
v̇x +
b) Überlegen Sie sich qualitativ, wie die Bewegung abläuft. Wie verhalten
sich vx , vy und vz insbesondere für sehr große Zeiten t?
Während die Bewegung in x- bzw. y-Richtung schnell abklingt, nimmt,
falls die Anfangsgeschwindigkeit kleiner als die Endgeschwindigkeit ist,
die Geschwindigkeit in -z-Richtung zu, bei abnehmender Beschleunigung. Das geht solange bis die Gesamtkraft Null wird. Danach bewegt
sich der Körper mit nahezu konstanter Geschwindigkeit v∞ senkrecht
nach unten.
c) Gewinnen Sie aus den Bewegungsgleichungen für vx und vy eine Differentialgleichung für die Größe η 2 ≡ vx2 + vy2 und untersuchen Sie den
Grenzfall vz2 ≫ η 2 .
Indem man die erste Gleichung mit vx und die zweite Gleichung mit
vy multipliziert und beide Gleichungen addiert, findet man
β
γ
β
γp 2
1d 2
2
2
2
(vx + vy ) +
+ v (vx + vy ) = η η̇ +
+
vz + η 2 η 2 = 0
2 dt
m m
m m
Hier ist η per definitionem positiv semidefinit. Deshalb kann bis auf
den Fall der trivialen Lösung, die nur für Anfangsbedingungen vx (0) =
8
vy (0) = 0 auftreten kann, durch η geteilt werden. Für η 2 ≪ vz2 erhält
man für v näherungsweise
s
s
2
p
❆η 2✁
η
v =
vz2 + η 2 = |vz | 1 + 2 = −vz 1 + ✁❆✁2 ≈ −vz ,
❆
vz
✁vz❆
wobei das negative Vorzeichen mit Blick auf die AB gewählt wurde.
γ
β
− vz η = 0
η̇ +
m m
γ
β
v̇z + vz − vz2 = −g
m
m
d) Für die Anfangsbedingungen vx (0) = vy (0) = 0 ist η(t) = 0 eine
mögliche Lösung. Lösen Sie die dann noch verbleibende Differentialgleichung für vz (t) durch Trennen der Variablen mit der Anfangsbedingung vz (0) = 0.
dvz
vz2 − βγ vz −
mg
γ
=
γ
dt
m
Mit den Nullstellen des Nenners
s
mg
β
β2
+
v1,2 =
±
2γ
4γ 2
γ
gewinnt man die Partialbruchzerlegung
1
1
1
1
−
,
=
v
−
v
v
−
v
v
−
v
vz2 − βγ vz − mg
1
2
z
1
z
2
γ
die nach Integration zu
vz − v1 = Γ t + C̃
ln vz − v2 mit Γ =
führt. Exponentieren, ergibt dann
vz − v1
= C eΓ t ,
vz − v2
γ
(v1 − v2) > 0
m
wobei das Vorzeichen, welches beim Auflösen des Betrages ins Spiel
kommt, in die ohnehin noch unbekannte Integrationskonstante C gesteckt wurde. Diese bestimmt sich aus der Anfangsbedingung vz (0) = 0
zu:
v1
C =
.
v2
9
Indem man nach vz auflöst, findet man schließlich
vz
1 − eΓ t
= v1
.
1 − vv12 eΓ t
Man überzeugt sich, daß im Grenzfall großer Zeiten die Geschwindigkeit gegen v2 < 0 geht:
✟
−Γ
t
Γ✚t
✟
e
1
−
e
✟
✚
= v2 .
lim vz (t) = ✚
v✚1
✟
✟
v✚
t→∞
v2 ✟
✚t
1 Γ
−Γ
t
✚
e
1 − v1✟e
v2 ✚
✟
10