Baurobotik/Hightech Automatisierte Hochbaustellen
Werbung

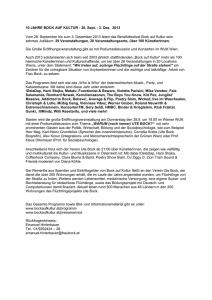
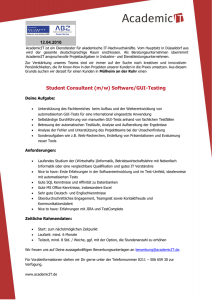
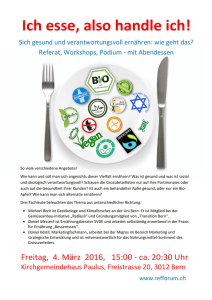
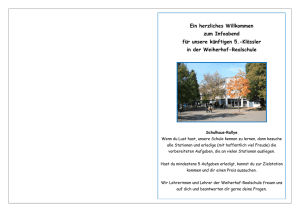
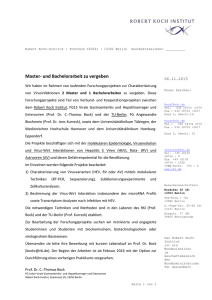
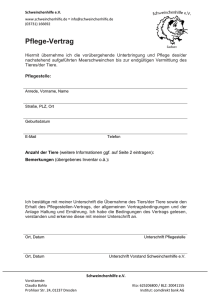
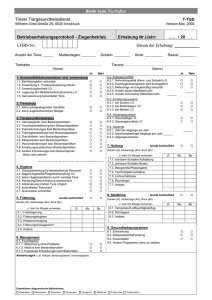
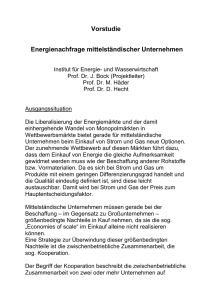
BAU - R AT I O N A L I S I E RU N G Baurobotik/Hightech Automatisierung und Roboterisierung von Produktionsprozessen wird zunehmend ein Thema in der Bauindustrie, da weltweit steigende Grundstücks- und Rohstoffpreise sowie der Bedarf an im Hinblick auf die Haustechnik gut ausgestatteten Gebäuden eine Steigerung der Effizienz des Bauen selbst unumgänglich werden lassen – wenn man nicht möchte, dass die Preise für den Erwerb von Wohnraum ins Unermessliche steigen. Auch ist die Bauindustrie gut beraten, darin ihre Produktionsprozesse zu verbessern, um so den Anschluss an andere produzierende Industrien nicht zu verlieren. An vielen Spitzenuniversitäten weltweit wurden deshalb in den letzten Jahren Institute eingerichtet, die sich explizit mit Fertigungstechnik, Automatisierung und Robotik im Bauwesen beschäftigen (z. B. Harvard University, ETH Zürich, Tokyo University, Seoul National University, MIT). Führend in diesem Bereich ist unter anderem die Technische Universität München, an der bereits seit über zehn Jahren in diesem Bereich intensiv geforscht wird. Geschichtlicher Hintergrund Automatisierte Hochbaustellen sind die Spitze einer Entwicklung, welche in den 1970er Jahren in Japan mit dem Aufkommen einer auf Automatisierung und Fließband-Fertigung beruhenden Vorfertigungsindustrie im Wohnungsbau begann (Ausgabe Nr. 4 September 2011). In den 1980er Jahren wurden zunächst in Japan und anschließend weltweit Baurobotersysteme entwickelt, die einzelne Prozesse auf der Baustelle wie Schweißen, Betonglätten, Beschichten, Streichen und Transportieren von Baumaterialien voll-, teilautonom oder im Remotebetrieb durchführen konnten (Ausgabe 5/6 Dezember 2011). In den 1990er Jahren entwickelten sich schließlich die automatisierten Hochbaustellen. Diese Feldfabriken schafften eine für einen hohen Automatisierungsgrad notwendige strukturierte Umgebung auf der Baustelle und bedienten sich sowohl Elementen der Vorfertigung als auch der bereits vorher entwickelten Bauroboter als Sub-Systeme. © Prof. T. Bock Automatisierte Hochbaustellen truktion. Der typische Bauablauf sieht vor, dass sich ein automatisiertes Arbeitsgeschoss sozusagen als vertikal bewegende Fabrik nach oben arbeitet. Die Ansätze von Skanska und Kajima operieren ebenfalls mit automatisierten Systemen, kehren den Prozess jedoch im Wesentlichen um und heben die ebenerdig fertiggestellten Geschosse mittels hydraulischer Vorrichtungen geschossweise in die Höhe. Ursprünge der eingesetzten Technologien Bild 1: Das Bild zeigt die mit dem Gebäude nach oben wandernde automatisierte Feldfabrik der Firma Shimizu (System SMART). Automatisierte Hochbaustellen wurden bis heute sowohl hinsichtlich der eingesetzten Technologien als auch hinsichtlich der möglichen Anwendungsszenarien weiterentwickelt. So sind diese heute nicht mehr nur auf die Anwendung zur Erstellung vertikal orientierter und orthogonaler Gebäudeformen reduziert, sondern können die unterschiedlichsten Gebäudetypen und Formen realisieren. Seit 2008 werden modifizierte (und gewissermaßen im Rückwärtsmodus ablaufende) automatisierte Hochbaustellen auch zum Rückbau von Gebäuden eingesetzt. Verbreitung der Systeme Fast alle großen japanischen, US-amerikanischen, französischen und skandinavischen Bauunternehmen arbeiten seit mehr als zwei Jahrzehnten an der Entwicklung automatisierter Hochbausysteme. Wie die Beispiele von NCC und Skanska zeigen, gibt es auch in Europa interessante, bereits realisierte Ansätze. Einige Unternehmen demonstrieren die Leistungsfähigkeit derartiger Systeme anhand von Experimentalbaustellen und Computersimulationen. NCC, Skanska, Obayashi, Shimizu, Kajima, Fujita, Taisei, Takenaka, Maeda und Hazama haben bereits (Hoch-) Häuser im automatisierten Verfahren errichtet. Die meisten Systeme basieren auf einer Stahlskelettbau-Kons- Automatisierte Hochbaustellen folgen dem Prinzip der Baustellenfertigung, das auch in anderen Industrien bei der Erstellung sehr großer und unbeweglicher Produkte benutzt wird wie beispielsweise großer Flugzeuge, oder Schiffe. Baustellenfertigung bedeutet, dass die Teile oder Komponenten an einem Ort zusammen kommen, positioniert und montiert werden – im Gegensatz zur Fließfertigung. Sowohl in der Flugzeugindustrie als auch in der Schiffsbauindustrie wird dabei mit automatisierten Deckenkränen als auch mit Positionier- und Schweißsystemen gearbeitet. Bei der Entwicklung von automatisierten Hochbaustellen waren deshalb auch häufig Unternehmen aus diesen Branchen sowie aus der Elektronik oder Roboterindustrie beteiligt. Beispiele für automatisierte Hochbaustellen Um die Funktionsweise von automatisierten Hochbaustellen zu verdeutlichen, sind im Folgenden einige Systeme und deren Ansätze exemplarisch erklärt. Die Systeme unterscheiden sich sowohl hinsichtlich der Baustruktur, die sie in der Lage sind zu verarbeiten (Stahlkomponenten, Betonkomponenten, Mischsysteme), als auch hinsichtlich der Lage und Ausprägung der Feldfabriken. SMART, Shimizu Corp.: Shimizu experimentierte bereits Ende der 1980er auf dem Firmengelände mit automatisierten Hochbaustellen. Schließlich wurde so SMART (Shimizu Manufacturing Sys- www.ibr-rgb.de – ibr · März 2012 21 BAU - R AT I O N A L I S I E RU N G Bild 4a: Obayashi’s Big Canopy in Singapur im Einsatz, 1990er Jahre © Prof. T. Bock Big Canopy, Obayashi Corp.: Obayashi hat neben seinem ABCS, das für Stahlkonstruktionen eingesetzt werden kann und vom Grundprinzip her SMART ähnelt, auch ein automatisiertes Hoch- © Prof. T. Bock Baustellenlogistiksystem (Parallel Delivery System, PDS), das sicherstellt, dass die Materialien vom Boden auf automatisiertem Wege an den Einbauort gelangen. Ferner arbeitet das ABCS mit einem System für die automatisierte und hochpräzise Ausrichtung von Stützen und anderen Bauteilen. © Prof. T. Bock tem by Advanced Robotics Technology) entwickelt und im Laufe der 1990er zur Errichtung zahlreicher Hochhäuser eingesetzt. Beim SMART System sitzt die Feldfabrik auf dem Gebäude und wandert mittels Klettersystemen mit dem Gebäude nach oben. In der Feldfabrik wird das Gebäude Geschoss für Geschoss erstellt. Die Positionierung der Stahlkomponenten der Tragstruktur wird mittels automatisierter Deckenkräne bewerkstelligt, welche sich über ein Schienensystem am Dach der Fabrik autonom bewegen können. Bild. 2: SMART Roboterkräne-System wurde in den 1990er von Shimizu zur Erstellung zahlreicher Bürogebäude verwendet. © Prof. T. Bock Bild 4b: Mehrere Roboterkräne bewegen sich parallel im Schienensystem der Big Canopy Feldfabrik. Bild 3a: Explosionsdarstellung von Obayashis ABCS. 22 ibr · März 2012 – www.ibr-rgb.de bausystem entwickelt, das sich für Gebäude eignet, die aus Betonelementen bestehen. Die Feldfabrik bewegt sich mit dem Gebäude nach oben, sitzt aber nicht auf ihm, sondern umspannt das Gebäude. Wie bei SMART und ABCS stellen die automatisierten Deckenkräne das zentrale Subsystem dar. AMURAD, Kajima Corp.: Bei AMURAD (Automatic Up-Rising Construction by Advanced Technique) bewegt sich die Feldfabrik nicht mit dem Gebäude noch oben, sondern sie befindet sich erdgeschossig. Hier wird das Geschoss jeweils durch Robotersysteme aus Betonfertigteilen erstellt und anschließend wird das gesamte Geschoss sowie die darüberlegenden bereits erstellten Geschosse durch computergesteuerte und hochpräzise hydraulische Presssysteme nach oben gedrückt. © Obayashi ABCS, Obayashi: Das ABCS (Automated Building Construction System) wird seit 1990 kontinuierlich weiterentwickelt, um Montagevorgänge vor Ort in hohem Maße zu automatisieren. Das geschieht durch den Aufbau einer sich vertikal nach oben bewegenden Fabrik vor Ort mit automatisierter Logistik, automatisierter Positionierung von Stützen und Trägern, automatisierter Schweißtechnik und digitaler Echtzeit-Prozessüberwachung. Eine vertikal bewegliche „Fabrik“ (SCF, Super Construction Factory) befindet sich am oberen Ende des Gebäudes und bewegt sich während des Bauprozesses Geschoss für Geschoss nach oben. Ein zentrales Element des SCF ist das automatisierte Bild 3b: An Schienen verfahrende Robotersysteme platzieren und montieren Komponenten in der Super Construction Factory des ABCS. 2001, Japan. System Skanska: Die Grundidee des Systems der Firma Skanska ist es, ein möglichst langes Geschoss zu errich- © Prof. T. Bock © Prof. T. Bock BAU - R AT I O N A L I S I E RU N G Bild 5a: AMURAD’s erdgeschossiges schienengeführtes Produktionssubsystem, 1996–2006 im Einsatz durch die Firma Kajima © Skanska ten, die primäre Baurichtung ist also horizontal. Mithilfe von horizontalen Führungsschienen kann eine Montagemaschine die Elemente beliebig weit in y-Achse bewegen, während ein Subsystem aus kleinen Kränen das Geschoss nach oben drücken kann, um ein weiteres Geschoss anzubauen. Der Montageprozess besteht aus 4 Schritten. Ein Lkw liefert die vorgefertigten Elemente an, welche dann zunächst von einem sich in z- und y-Richtung bewegenden Portalkran übernommen und auf einer fahrbaren Plattform abgelegt werden. Diese Plattform bewegt sich in x-Richtung und bringt die Elemente zu der horizontalen Montagemaschine, die sich in y-Richtung bewegt. Der letzte Schritt besteht daraus, dass die kleinen Kräne, die entlang der Führungsschienen der Montagemaschine stehen, die Elemente in z-Richtung bewegen. © Skanska Bild 6a: Skanskas Systematischer Bauablauf (2004) Bild 6b: Skanskas erdgeschossiges schienengeführtes Produktionssystem (2004) NCC Komplett: Die Grundidee dieses Systems ist eine Feldfabrik, die von der NCC Vorfertigungsfabrik „just-in-time“ und „just-in-sequence“ beliefert wird. Die benötigten Elemente werden schon in der NCC Vorfertigungsfabrik komplett ausgestattet und mit Installationen versehen. Die Feldfabrik stellt quasi eine Ummantelung der Baustelle dar, innerhalb derer man vor sich ändernden Witterungsbedingungen geschützt ist. Innerhalb der Baustelle muss wegen der komplett und sehr präzise vorgefertigten Betonelemente sehr auf Sauberkeit geachtet werden – die Bauarbeiter tragen alle Handschuhe und Schuhüberzieher. Auch bei diesem System folgt die Anlieferung der Notwendigkeit © Prof. T. Bock Bild 5b: AMURAD’s schienengeführtes Logistiksubsystem Bild 7a: Betonelemente werden in der Fabrik komplett vorgefertigt. www.ibr-rgb.de – ibr · März 2012 23 © Prof. T. Bock BAU - R AT I O N A L I S I E RU N G bäudeteils von außen. Somit kann die Fassade parallel von außen bearbeitet und fertiggestellt werden und ein fertiges Gebäude verlässt die Fabrik. RCACS, Korea: Das RCACS (Robotic and Crane Based Automated Construction System) wurde 2008 bis 2012 anhand einer Experimentalbaustelle von einem Zusammenschluss aus koreanischen Firmen (Bau-, Elektronik- und Baumaschinenfirmen), Universitäten und Forschungsinstituten entwickelt. Bei diesem System wird zunächst der Betonkern eines Hochhauses mittels automatisierter Gleitschalungssysteme erstellt. An diesem Kern wird dann die Feldfabrik, in der die Kern umgebende Stahlkonstruktion des Gebäudes mittels roboterisierter Positionier- und Montagesysteme erstellt wird, Geschoss für Geschoss nach oben gezogen. Modularisierung der Feldfabriken Viele der automatisierten Hochbausysteme wurden entweder von Beginn an als modulare Produktionssysteme entwickelt oder mit der Zeit zu solchen weiterentwickelt. Die Modularität der Feldfabrik und der Subsysteme er- Bild 9: RCACS Roboterkran im Einsatz, Korea, 2012. © Prof. T. Bock © Prof. T. Bock BAM, Netherlands: Die Grundidee dieses Systems ist die geschossweise Abarbeitung der Baustelle, das heißt die primäre Baurichtung ist vertikal. Besonders in dichten urbanen Gefü- gen ist diese Art des Bauens wesentlich effizienter als die konventionelle, weil sich Baustelle und Materialien geschossweise mitbewegen und dadurch zum einen Platz gespart wird und zum anderen die Baustelle vor Witterung geschützt ist. Was die Logistik angeht, folgt man dem Pull-Prinzip, das heißt es werden nur die Elemente geliefert, die in dem Moment tatsächlich gebraucht werden. Organisatorisch betrachtet folgen Gerüst, Baustoffe und Schalungen der Arbeitsebene, befinden sich also nur dort, wo sie benötigt werden. Die Anlieferung erfolgt just in time. Als sekundäres System gibt es einen Brückenkran, der schwere Bauteile bewegt und dem Menschen so die schwere körperliche Arbeit abnimmt. Wie bei den meisten anderen Feldfabriken auch umgreift die Feldfabrik nicht nur das Arbeitsgeschoss (Geschoss, in dem die Baukomponenten platziert und montiert werden) sondern auch 1 bis 2 Stockwerke des darunterliegenden Ge- © Prof. T. Bock auf der Baustelle, was auch hier das Lagern der Materialien/Bauteile unnötig macht. Ebenfalls gibt es auch bei diesem System einen Brückenkran als zentrales Subsystem. Bedingt durch die Feldfabrik waren die durch NNC Komplett gefertigten Gebäude auf 8 Stockwerke in der Höhe und 60 Meter in der Breite beschränkt. Bild 8a: Die on Site Factory von BAM klettert mit dem Gebäude nach oben und schafft eine wetterunabhängige und strukturierte Umgebung (2011, Holland). 24 ibr · März 2012 – www.ibr-rgb.de Bild 8b: Wie bei den meisten anderen Feldfabriken auch umgreift die Feldfabrik ebenfalls 1 bis 2 Stockwerke des darunterliegenden Gebäudeteils zur parallelen Bearbeitung von außen. © Prof. T. Bock Bild 7b: Baustellenfabrik von NCC (2006). Bild 10: Shimizus SMART wurde als modulares Produktionssystem weiterentwickelt. Japan, 2000. © Prof. T. Bock BAU - R AT I O N A L I S I E RU N G verschiedenen Kranrobotern und diese wiederum je nach Bauaufgabe mit unterschiedlichen Endeffektoren bestückt werden konnten. Zunehmende Flexibilisierung Bild 11: Heute werden auch Gebäude mit nicht-orthogonalen Grundrissen und Fassadenformen mittels vertikal nach oben wandernder Feldfabriken realisiert, 2007, Japan. Diffusion von Basistechnologien Eine interessante Entwicklung ist auch die zunehmende Diffusion der in automatisierten Hochbaustellen eingesetzten Basistechnologien. Immer häufiger werden so einzelne Sub-Systeme, die eigentlich für die automatisierten Hochbaustellen entwickelt wurden (wie bei© Obayashi © Prof. T. Bock möglichte, dass das System auf verschiedene Grundrissabmessungen und Konfigurationen der Gebäude angepasst werden konnten. Auch erlaubte die Modularität, dass die Feldfabrik mit Obwohl die meisten automatisierten Hochbausysteme modular aufgebaut waren und so unterschiedliche Gebäudeabmessungen realisieren konnten, war es doch bisher notwendig, dass der Entwurf Prinzipien der orthogonalen Anordnung folgte. Jüngst konnten aber auch Gebäude mit nicht-orthogonalen Grundrissen und Fassadenformen realisiert werden. Es ist zu erwarten, dass sich diese Entwicklung fortsetzt und sich der Ansatz der flexiblen produzierenden Industrien, der sich derzeit durchsetzt, auch bei den automatisier- ten Hochbausystemen durchsetzen wird. Ein wichtiger Schritt in diese Richtung wurde 2007 bei der Erstellung eines nicht-orthogonalen Gebäudes in Tokio gemacht. Grundlage für die Erreichung eines hohen Automatisierungsgrades war hier die geschickte Modularisierung, welche eine Automatisierung in der Vormontage als auch in der Logistik und Positionierung der Module auf der Baustelle ermöglichte. Bild 12b: Beispiele für ABCS-Basistechnologien. spielsweise automatisierte Logistikaufzüge, automatisierte Ausrichtungs- und Genauigkeitsmessung, automatisierte Positioniersysteme, SchweißroboterSysteme) als Einzelsysteme zur Effizienzsteigerung auch in mehr oder weniger konventionellen Baustellen eingesetzt. So setzen heute die Firmen Shimizu und Obayashi in zahlreichen laufenden Bauprojekten Subsysteme von SMART, ABCS und Big Canopy ein. Das wohl bekannteste Beispiel stellt hier die Erstellung des 634 Meter hohen Tokyo Sky Tree dar, dessen sicherer und schneller Aufbau nicht zuletzt durch die Verwendung verschiedenster ABCS-Subsysteme ermöglicht wurde. Automatisierter Rückbau Bild 12a: Bei der Erstellung des 634 Meter hohen Tokyo Sky Tree kamen einzelne Basistechnologien, welche ursprünglich für Obayashis ABCS entwickelt wurden, zum Einsatz. Seit 2008 werden modifizierte Versionen von automatisierten Hochbaustellen www.ibr-rgb.de – ibr · März 2012 25 © Prof. T. Bock BAU - R AT I O N A L I S I E RU N G Bild 13: Automatisierter Rückbau von 3 Bürohochhäusern in Tokio, 2008. auch zum Rückbau von Hochhäusern in dichten innerstädtischen Gebieten eingesetzt. Die japanische Firma Kajima verwendete das AMURAD System gewissermaßen in rückwärts ablaufender Form zum Rückbau von drei Bürogebäuden in Tokio. Referenzen Dabei wurden die Geschosse mittels computergesteuerter hydraulischer Pressen nun nicht geschossweise nach oben gedrückt, sondern geschossweise im Erdgeschoss zerlegt und dann jeweils um ein Geschoss abgesenkt. Der Abtransport der Materialien konnte so jeweils im Erdgeschoss geschehen und in den oberen Geschossen konnte parallel dazu – was Zeit sparte – bereits der Ausbau der Materialien vorbereitet werden. • Linner, T., Bock, T. (2012) Evolution of large-scale Industrialization and Service - Innovation in Japanese Prefabrication Industry. In: Journal of Construction Innovation: Information, Process, Management, Volume 12 Issue 2 Seit 2012 setzt nun mit Takenaka bereits die zweite große japanische Baufirma ein System zum automatisierten Rückbau von Gebäuden ein. Der automatisierte Rückbau im Allgemeinen hat neben der höheren Rückbaugeschwindigkeit den Vorteil, dass im Vergleich zum konventionellen Rückbau (oder besser Abriss) extrem hohe Recyclinggrade erreicht werden. Erste Schätzungen gehen davon aus, dass diese Systeme ca. 8 mal eingesetzt werden müssen, bis sich ihre Entwicklung für die betreibende Baufirma bezahlt macht. 26 ibr · März 2012 – www.ibr-rgb.de • Bock, T., Linner, T., Lauer, W., Eibisch, N. (2010) Automatisierung und Robotik im Bauen. Arch+ Zeitschrift für Architektur und Städtebau, Mai 2010, pp. 34-39 • T. Bock, T. Linner, S. Miura (2011) Robotic High-Rise Construction of Pagoda Concept: innovative earthquake-proof Design for the Tokyo Sky Tree. In: Proceedings of CTBUH 2011 World Conference, October 2011, Seoul, Korea • Bock, T., Linner, T. (2010) Mass Customization in a knowledge-based Construction Industry for sustainable high-performance Building Production. CIB World Congress 2010, Manchester/Salford, May 2010 • Bock, T., Linner, T., Lee, S. (2009) Integrated Industrialization Approach for lean Off-/On -site Building Production and Resource Circulation. 7th World Conference on Sustainable Manufacturing, India, November 2009 Prof. Prof. h.c./SRSTU Dr.-Ing./ Univ. Tokio Thomas Bock Thomas Linner Lehrstuhl für Baurealisierung und Baurobotik Fakultät für Architektur Technische Universität München Arcisstr. 21 80290 München Tel.: 089 – 289 22 176 Fax: 089 – 289 22 102 E-Mail: [email protected] Internet: www.bri.ar.tum.de