Gleitfiguren und Gelenkfiguren
Werbung

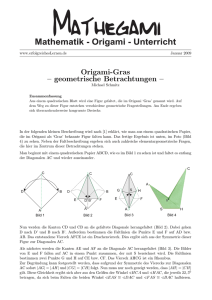
Hans Walser Publiziert in: Mathematikinformation, Nr. 38, 15. Januar 2003, S. 17 – 34. ISSN 1612-9156 Gleitfiguren und Gelenkfiguren Kurzfassung: Es werden einige Beispiele von Figuren vorgestellt, bei denen man sich eine mechanische Realisation mit gelenkig verbundenen Stäben oder Stäben, deren Enden auf Schienen laufen, vorstellen kann. Für die grafische Realisation drängt sich der Einsatz von DGS (dynamische Geometrie Software) auf. Der ästhetische Reiz dieser Figuren beruht hauptsächlich auf den auftretenden Symmetrien. Im Unterricht können solche Figuren als Motivation für den Umgang mit entsprechender Software dienen; es ist aber auch denkbar, wirkliche Modelle solcher Figuren zu bauen. Wir finden auch Beispiele von Problemen, welche in der EUKLIDischen Geometrie mit Zirkel und Lineal nicht lösbar sind, aber mit Gleitmodellen oder Gelenkmodellen recht einfach gelöst werden können. 1 Gleitfiguren 1.1 Gleitsterne Wir denken uns acht Schienen, welche radial und unter gleichmäßiger Winkelverteilung von einem zentralen Punkt ausgehen. Auf einer der Schienen denken wir uns einen Gleitpunkt A und setzen in diesem Punkt eine Strecke (deren Länge wir auf 1 normieren) so an, dass ihr anderer Endpunkt auf der benachbarten Schiene gleitet (Figur 1a)). Wir ergänzen die Figur mit weiteren gleitenden Strecken zu einem vierzackigen Stern (Figur 1b)). A a) A b) Figur 1 Acht Schienen Der Gleitpunkt A kann vom Zentrum maximal den Abstand 2 haben. Die Figur 2 zeigt eine Figurensequenz, die sich ergibt, wenn wir mit dem Gleitpunkt A von ganz rechts außen nach ganz links außen fahren. Hans Walser: Gleit- und Gelenkfiguren A A A A A 2 A A A A A A A Figur 2 Figurensequenz Die Figur 3 zeigt eine Überlagerung von mehreren Figuren einer Sequenz. Figur 3 Überlagerung von Sternfiguren Aufgabe 1: a) Welches Beispiel der Figur 2 hat den größten Umkreis? Wie groß ist dessen Radius? b) Welches Beispiel hat den kleinsten Umkreis? Wie groß ist dessen Radius? Hans Walser: Gleit- und Gelenkfiguren 3 Aufgabe 2: Wir arbeiten analog mit 2n, n N , radialen Schienen. Wie steht es mit dem größten und dem kleinsten Umkreisradius? Wie verhält sich die Sache für n ? Aufgabe 3: Was geschieht, wenn wir mit einer ungeraden Anzahl radialer Schienen arbeiten? Wir können ein mechanisches Modell mit Vorhangschienen und passenden Plastikgleitern bauen (Fig. 4). Das Durchfahren des Mittelpunktes ist in einem solchen Modell allerdings nicht möglich, da vier Punkte gleichzeitig über die Kreuzung fahren müssten. Figur 4 Modell Aufgabe 4 (Offene Aufgabe): Gesucht ist ein Modell, bei welchem das Durchfahren des Mittelpunktes möglich ist. Dem Autor ist kein praktikables Modell bekannt. Bei der Verwendung dynamischer Geometrie Software ergeben sich Probleme des “toten Punktes”. Dies hängt damit zusammen, dass bei den beiden Schnittpunkten eines Kreises mit einer Geraden die Software manchmal nicht mehr “weiß”, welches der richtige von den beiden Schnittpunkten ist. Der “tote Punkt” tritt dann ein, wenn die Gleitstrecke rechtwinklig zur Schiene steht. Beim weiteren Bewegen kann der Gleitpunkt in die falsche Richtung fahren. Aufgabe 5: Wie kann das Problem des toten Punktes gelöst oder umgangen werden? Pythagoreische Dreiecke Im Sonderfall der Figur 5 liegen die acht Gleitpunkte des Sternes zusätzlich auf einem Quadratraster. Das in dieser Figur getönt eingezeichnete rechtwinklige Dreieck ist das pythagoreische Dreieck mit dem Seitenverhältnis 3:4:5. Hans Walser: Gleit- und Gelenkfiguren 4 Figur 5 Sonderfall Aufgabe 6: Nachweis des Seitenverhältnisses 3:4:5? Figur 6 Pythagoreisches Dreieck? Aufgabe 7: Die Figur 6 zeigt einen weiteren Sonderfall, bei dem ebenfalls alle Gleitpunkte auf einem Quadratraster liegen. Ist das getönte Dreieck auch pythagoreisch? Aufgabe 8: Ergeben sich allgemein pythagoreische Dreiecke, wenn alle Gleitpunkte auf einem Quadratraster liegen? 1.2 Winkeldreiteilung nach ARCHIMEDES Die Winkeldrittelung ist eine der klassischen Aufgaben, welche in der EUKLIDischen Geometrie mit Zirkel und Lineal nicht gelöst werden können. Die Figur 7 zeigt ein mechanisches Modell zur Winkeldrittelung (vgl. [2]). Hier haben wir nur zwei Schienen, die gelenkig miteinander verbunden sind. Die erste Strecke beginnt im Gelenkpunkt der beiden Schienen und endet auf der oberen Schiene. Sie ist also starr mit der oberen Schiene verbunden. Die zweite Strecke geht vom Ende der ersten Strecke auf der oberen Schiene zu einem Gleitpunkt auf der unteren Schiene, die dritte Strecke von dort wieder hinauf zu einem Gleitpunkt auf der oberen Schiene. Der Winkel zwischen den beiden Schienen ist dann ein Drittel des Winkels zwischen der unteren Schiene und der dritten Strecke. Hans Walser: Gleit- und Gelenkfiguren 5 Figur 7 Gerät zur Winkeldreiteilung Aufgabe 9: Nachweis der Winkeldrittelungs-Eigenschaft? Bemerkung: Auch dieses Gerät kann mit dynamischer Geometrie Software simuliert werden. Dies ist aber nicht die einfachste Methode zur mechanischen Winkeldrittelung unter Verwendung dynamischer Geometrie Software. Didaktisch viel einfacher ist folgendes Verfahren (Figur 8): Um einen Winkel ASB zu dritteln, wählen wir im Winkelfeld einen beliebigen Punkt P und verdreifachen den Winkel ASP. Dies kann zum Beispiel geschehen, indem wir den Punkt A an der Geraden SP spiegeln (Bildpunkt A ) und dann den Punkt P an der Geraden S A spiegeln (Bildpunkt P ). Nun bewegen wir mit dem Zugmodus den Punkt P, bis der Punkt P auf die Gerade SB zu liegen kommt. Der Winkel ASP ist dann ein Drittel des Winkels ASB. B P' A' S P A Figur 8 Winkeldrittelung mit dynamischer Geometrie Software 2 Gelenkfiguren Es werden ausschließlich Strecken derselben Länge (Normierung auf Länge 1) an den Enden gelenkig verbunden. Derartige Gelenkmodelle können aus Stahlbändern gebaut werden. Solche Stahlbänder sind etwa 13 mm breit und werden zur Umbänderung sperriger schwerer Gegenstände, etwa großer Kisten oder Holzspälten, verwendet. Die Stahlbandstücke werden an beiden Enden mit einer 3 mm - Bohrung versehen (mit HSS - Bohrern arbeiten), als Gelenkzapfen dienen M3 - Schrauben, welche auf der Rückseite mit zwei gegeneinander angezogenen Muttern gesichert werden. Es geht aber auch mit Kartonstreifen (Breite etwa 15 - 20 mm, Länge mit Vorteil 20.5 cm, so dass ein DIN A4 - Karton zerschnitten werden kann). Lochung mit einer LederLochzange (ein üblicher Büro-Locher ergibt zu große Löcher), Gelenkzapfen aus Mustertütenklammern. Aufgabe 10 (Offene Aufgabe): Andere technische Realisationen von Gelenkmodellen? (Dem Autor ist keine weitere technische Realisation bekannt.) Hans Walser: Gleit- und Gelenkfiguren 6 2.1 Starre regelmäßige Vielecke Aus drei Strecken ergibt sich ein starres gleichseitiges Dreieck. Aus vier Strecken ergibt sich ein nicht starrer Rhombus. Lässt sich auch ein (starres) Quadrat konstruieren? 2.1.1 Quadrat Im Gelenkmodell der Figur 9 sind alle Strecken gleich lang. Das Modell ist starr. Figur 9 Ist der Rhombus ein Quadrat? Aufgabe 11: Ist der getönte Rhombus in der Figur 9 ein Quadrat? Die Figur 10 zeigt einen Vorschlag mit weniger Strecken (aus [3], p. 19). Figur 10 Lösung mit weniger Strecken Aufgabe 12: Warum ist hier der getönte Rhombus ein Quadrat? Die Figur 11 zeigt einen Vorschlag mit noch weniger Strecken, welcher aber Überkreuzungen enthält. Figur 11 Lösung mit Überkreuzungen Aufgabe 13: Ist der getönte Rhombus der Figur 11 ein Quadrat? Aufgabe 14: Gibt es eine Lösung mit noch weniger Strecken? Hans Walser: Gleit- und Gelenkfiguren 7 2.1.2 Regelmäßiges Fünfeck Wie bauen wir ein (starres) regelmäßiges Fünfeck? Unser Problem ist gelöst, wenn es gelingt, ein starres gleichschenkliges Dreieck zu bauen, dessen Schenkel aus zwei Strecken der Länge 1 bestehen und dessen Basis die Länge = 5 +1 2 (goldener Schnitt) hat (Figur 12a). Aus zwei solchen Dreiecken und einer weiteren Stange lässt sich dann das regelmäßige Fünfeck gemäß Figur 12b) bauen. a) b) Figur 12 Bauteil und regelmäßiges Fünfeck Wir beginnen mit dem Gelenkmodell der Figur 13a). In diesem Gelenkmodell hat die (nicht eingezeichnete) 2 2 Strecke AB die Länge 2 2 12 + 12 12 = 3 52+1 = 3 . Hier steigt der Adrenalinspiegel, weil der goldene Schnitt erscheint. ( ) ( ) A A D C E B a) B b) Figur 13 Der goldene Schnitt erscheint An die Endpunkte der (virtuellen) Strecke AB bauen wir nun das Gelenkmodell der Figur 13b). Darin ist das Dreieck ABC gleichschenklig mit der Schenkellänge 3 und der Basislänge 3 ; es ist also ähnlich zum gesuchten Dreieck der Figur 12a). Dieses gesuchte Dreieck ist aber selbst ebenfalls in der Figur 13b) enthalten, nämlich als Dreieck DEC. Damit ist die Aufgabe gelöst. Die Figur 14 zeigt das vollständige Gelenkmodell; es besteht aus 55 Strecken und enthält Überkreuzungen. Hans Walser: Gleit- und Gelenkfiguren Figur 14 Starres regelmäßiges Fünfeck Die Figur 15 zeigt eine Lösung mit deutlich mehr Strecken, dafür ohne Überkreuzungen. Figur 15 Fünfeck ohne Überkreuzungen Aufgabe 15: Wie bauen wir Gelenkmodell für ein starres regelmäßiges Sechseck? 8 Hans Walser: Gleit- und Gelenkfiguren 9 2.2 Invarianz der Symmetrie 2.2.1 Dreistrahlige Drehsymmetrie Das Gelenkmodell der Figur 16 ist nicht starr, aber es hat immer eine dreistrahlige Drehsymmetrie (Figur 17). Figur 16 Nicht starres Gelenkmodell Figur 17 Dreistrahlige Drehsymmetrie In diesem Gelenkmodell sind an jedem Gelenkpunkt genau vier Strecken verbunden. Wir werden im folgenden weitere Gelenkmodelle mit dieser Eigenschaft kennenlernen. Hans Walser: Gleit- und Gelenkfiguren 10 2.2.2 Sechsstrahlige Drehsymmetrie Ist das Gelenkmodell der Figur 18 – welches eine zwölfstrahlige Drehsymmetrie aufweist – starr? Figur 18 Starres Gelenkmodell? Ein einzelner Zwölftels-Sektor der Figur 18 ist nicht starr (Figur 19). 30° 30° 30° 30° Figur 19 Der Sektor ist nicht starr Hingegen stellen wir fest, dass der Sektorwinkel offenbar invariant bleibt. Aufgabe 16: Warum ist das so? Hans Walser: Gleit- und Gelenkfiguren 11 Wir können somit einen Sektor durch sukzessives Spiegeln an den Sektorgrenzen zu einer geschlossenen Figur mit sechsteiliger Drehsymmetrie ergänzen. Die Figur 20 zeigt eine Sequenz solcher Beispiele. Figur 20 Sequenz Hans Walser: Gleit- und Gelenkfiguren 12 2.3 Änderung der Symmetrie 25.7 ° 22.5 ° 21.8 ° Wir versuchen, die Figur 21 als Sektorbauteil zu verwenden. Wenn wir das kleinere gleichseitige Dreieck drehen, verändert sich der Sektorwinkel. Figur 21 Verschiedene Sektorwinkel Daher ist es möglich, mit demselben Basisbauteil Figuren mit unterschiedlicher Drehsymmetrie zu bauen. Für den minimalen Sektorwinkel ergibt sich die offene Figur 22. Figur 22 Offene Figur Hans Walser: Gleit- und Gelenkfiguren 13 Ein Sektorwinkel von 22.5° führt zu achtstrahliger Drehsymmetrie (Figur 23). Werden die vorher offenen Enden verbunden, ergibt sich eine starre Figur. Figur 23 Achtstrahlige Drehsymmetrie Weiteres Vergrößern des Sektorwinkels führt zu einer Überlappung. Figur 24 Überlappung Hans Walser: Gleit- und Gelenkfiguren 14 Wenn wir den Sektorwinkel noch mehr vergrößern, ergibt sich eine siebenstrahlige Symmetrie (Figur 25). Durch Verbinden sich überlagernder Gelenkpunkte erhalten wiederum eine starre Figur. Diese Figur enthält die Ecken eines regelmäßigen Siebeneckes, ist also nicht mit Zirkel und Lineal konstruierbar. Figur 25 Siebenstrahlige Drehsymmetrie 3 Scheren Zwei Strecken der Länge eins werden an zwei inneren Punkten gelenkig verbunden. Die Figur 26 zeigt links eine symmetrische, rechts eine asymmetrische Schere. Figur 26 Scheren Wir setzen nun symmetrische Scheren gelenkig zusammen, die beiden Anfangspunkte setzen wir variabel auf eine vertikale Schiene (Figur 27). Figur 27 Zusammensetzung von symmetrischen Scheren Bewegen wir einen der beiden Anfangspunkt auf der Schiene, wird das Gelenkmodell in horizontaler Richtung geradlinig verlängert oder verkürzt. Es gibt verschiedene technische Anwendungen solcher Scheren, etwa bei Greifarmen oder Hebebühnen. Hans Walser: Gleit- und Gelenkfiguren 15 Bei Verwendung von asymmetrischen Scheren krümmt sich das Gelenkmodell (Figur 28). Figur 28 Krümmung bei asymmetrischen Scheren Wir können nun die Anfangspunkt so weit zusammendrücken, bis sich das Gelenkmodell schließt. Durch Verbinden der Anfangs- und Endpunkte ergibt sich eine starre regelmäßige Sternfigur. Die Figur 29 zeigt die Version für einen Siebenstern, bei welcher sieben Scheren benötigt werden. Das Beispiel ist darum bemerkenswert, weil in der EUKLIDischen Geometrie das regelmäßige Siebeneck nicht mit Zirkel und Lineal konstruiert werden kann. Allgemein ergibt sich mit n Scheren ein regelmäßiger n-Stern. Figur 29 Sternfigur Aufgabe 17: Die Scherengelenke der Figuren 28 und 29 teilen die Strecken jeweils im Verhältnis 1:2. Ist dies wesentlich zur Erreichung eines Siebeneckes? Was geschieht bei einer Verlagerung der Scherengelenke? 4 Einpass-Probleme 4.1 Einpassen eines gleichseitigen Dreieckes Zu drei gegebenen Geraden a, b und c soll ein gleichseitiges Dreieck ABC mit A a , B b und C c eingepasst werden. Aufgabe 18: Falls die drei Geraden durch einen Punkt S verlaufen, ist die Aufgabe elementar lösbar. Wie? Das Lösungsverfahren der Aufgabe 18 funktioniert auch noch, wenn die drei Geraden a, b, und c nicht durch einen Punkt verlaufen. Allerdings kann dann die Größe des Dreieckes nicht mehr durch zentrische Streckung variiert werden. (Bei Verwendung von DGS kann die Größe mit dem Zugmodus variiert werden.) Wie gehen wir nun vor, wenn die Größe des Dreieckes vorgegeben ist? Dazu denken wir uns das vorgegebene Dreieck ABC mit den Gleit-Ecken A und B auf die Schienen a beziehungsweise b aufgesetzt. Beim Gleiten des Dreieckes beschreibt die Ecke C eine Kurve. Deren Schnittpunkt mit c führt zum gesuchten Dreieck (Figur 30). Hans Walser: Gleit- und Gelenkfiguren a C 16 a b a b C B B c b C B c c A A A Figur 30 Einpassen eines Dreieckes Aufgabe 19: Die Ortslinie des Punktes C scheint eine Ellipse zu sein (Figur 30). Stimmt das? 4.2 Einpassen eines Rechteckes Aufgabe 20: Zu vier gegebenen Geraden a, b, c, d soll ein Rechteck ABCD mit A a , B b , C c und D d eingepasst werden (Figur 31). b d D A C a c B Figur 31 Einpassen eines Rechteckes 5 Kreisspiegelung Unter der Spiegelung an einem Kreis k mit Mittelpunkt M und Radius r verstehen wir eine Abbildung, welche zu einem Urbildpunkt P einen Bildpunkt Q auf dem bei M beginnenden Strahl durch P so zuordnet, dass MP MQ = r 2 . Zu gegebenem P kann Q gemäß Figur 32 konstruiert werden. N R P k Q M S Figur 32 Kreisspiegelung Hans Walser: Gleit- und Gelenkfiguren 17 Aufgabe 21: Stimmt diese Konstruktion? Die Kreisspiegelung kann auch mit Gelenkmodellen realisiert werden. Die Figur 33 zeigt ein Gelenkmodell mit vier Stangen, welche abwechslungsweise die Längen 2 und 4 haben. M, P und Q sind Mittelpunkte der betreffenden Stangen. Bei fixiertem M ist die Zuordnung P a Q eine Spiegelung am Kreis mit dem Mittelpunkt M und dem Radius 3 . B 2 D 2 1 P 2 Q M 2 2 1 C A Figur 33 Kreisspiegelung Aufgabe 22: Stimmt diese Behauptung? Die Figur 34 zeigt eine weitere Möglichkeit, die Kreisspiegelung durch ein Gelenkmodell zu realisieren. Dieses Modell geht auf PEAUCELLIER zurück. B b b a P Q M b b a A Figur 34 Kreisspiegelung Aufgabe 23: Auch hier stellt sich die Frage nach der Richtigkeit der Konstruktion. Die Kreisspiegelung ist im Allgemeinen kreistreu, das heißt das Bild eines Kreises ist im Allgemeinen wieder ein Kreis. Es gibt aber Ausnahmen. Da der Mittelpunkt M ins Unendliche abgebildet wird, sind die Bilder von Kreisen durch M Geraden. Das kann nun ausgenützt werden, um eine gerade Bewegung in eine Kreisbewegung umzusetzen und umgekehrt. Aufgabe 24: Wie geht das? Hans Walser: Gleit- und Gelenkfiguren 18 6 Lösungshinweise und Erläuterungen zu den Aufgaben Zu Aufgabe 1: a) Das Quadrat links oben hat den Umkreisradius r = 2 1. 414 . b) Der Stern rechts in der mittleren Reihe hat den Umkreisradius r = 1 2 cos (8) 0. 5412 . Bei diesem Stern sind alle acht Ecken auf dem Umkreis, die Strecken der Länge 1 sind Sehnen mit einem Zentriwinkel 34 . Zu Aufgabe 2: Die Figur mit dem größten Umkreis ist das regelmäßige n-Eck mit der Seitenlänge 2. Es hat den Umkreisradius r ( n ) = 1 . Für große n ist sin n n und damit r ( n ) n . Die Figur mit dem kleinsten Umkreis ist ein ( ) sin n ( ) Stern mit 2n Spitzen, die Winkel an den Spitzen messen n . Die Strecken der Länge 1 sind Sehnen mit einem 1 r(n ) = . Es ist lim r ( n) = 12 . Zentriwinkel n 1 n . Sein Umkreisradius misst () 2 cos n n Zu Aufgabe 3: Bei ungerader Schienenzahl geht der Stern nach einem Umgang nicht auf. Es müssten zwei Umgänge gemacht werden. Die Figur 35 zeigt die Situation für 5 Schienen. Figur 35 Fünf Schienen Zu Aufgabe 4: Offene Aufgabe. Dem Autor ist kein praktikables Modell bekannt. Zu Aufgabe 5: Das Problem des toten Punktes kann umgangen werden, indem die sukzessiven Strecken tatsächlich nicht als Gelenkmodell konstruiert werden, sondern aus der ersten Strecke durch geeignete Kongruenzabbildungen (Spiegelungen und Drehungen) generiert werden. Hans Walser: Gleit- und Gelenkfiguren 19 Zu Aufgabe 6: Im Dreieck mit dem Seitenverhältnis 3:4:5 gilt für den größeren der beiden spitzen Winkel: tan ( ) = 43 . Aus der Figur 36 lesen wir tan 2 = 12 ab. Das Additionstheorem für den Tangens liefert: 2 tan 2 1 tan2 2 tan ( ) = = 1 2 2 1 1 2 2 ( ) = 4 3 C β B A Figur 36 Beweisfigur Zu Aufgabe 7: Die Figur 6 zeigt das pythagoreische Dreieck mit dem Seitenverhältnis 15:8:17. Dies können wir wie folgt einsehen: Im Dreieck mit dem Seitenverhältnis 15:8:17 gilt für den kleineren der beiden spitzen Winkel: tan ( ) = 158 . Aus der Figur 6 lesen wir tan ( )= 2 tan ( ) = 1 4 ab. Das Additionstheorem für den Tangens liefert: 2 tan 2 1 tan2 2 = 2 1 4 (4) 2 1 1 = 158 Zu Aufgabe 8: Allgemein gilt: Genau wenn die acht Gleitpunkte auf einem Quadratraster liegen, ergeben sich pythagoreische Dreiecke. Pythagoreische Dreiecke, das heißt rechtwinklige Dreiecke mit ganzzahligen Seitenlängen, und die zugehörigen pythagoreischen Zahlentripel ( a, b,c N , a 2 + b 2 = c 2 ) werden meist unter zahlentheoretischen Aspekten behandelt, wobei insbesondere Fragen der Teilbarkeit eine Rolle spielen. Zur Konstruktion eines pythagoreischen Zahlentripel kann folgender Satz benützt werden: Ein Tripel ( a,b, c ) aus natürlichen Zahlen a, b,c mit geradem b ist genau dann ein primitives, das heißt teilerfremdes pythagoreisches Zahlentripel, wenn es teilerfremde natürliche Zahlen m und n mit m > n und ungerader Differenz m – n gibt, so dass gilt: a = m2 n 2 , b = 2mn , c = m 2 + n 2 (vgl. [1]). Hans Walser: Gleit- und Gelenkfiguren 20 In der Figur 37 ist exemplarisch für den Fall ( m, n) = ( 4,1) das rechtwinklige Dreieck in ein dem Quadratraster entsprechendes kartesisches Koordinatensystem eingebettet worden. Die Figur 37 ist ein Ausschnitt aus der Figur 6. y D(n,m) C E(0,2n) B(m,n) α A(0,0) x Figur 37 Beweisfigur n m Die beiden Vektoren AD = und BE = sind orthogonal; das Dreieck ABC hat also bei C einen m n rechten Winkel. Zur Berechnung des Winkels finden wir als Zwischenwinkel der beiden Vektoren 2 2 m n AB = und AD = den Wert cos = 22 mn 2 und daraus sin = m2 n 2 . Damit besteht im rechtwinkm +n + n m n m ( ) ( ) ligen Dreieck ABC das Seitenverhältnis a: b:c = m2 n 2 :( 2mn ) : m2 + n 2 . Wir haben also ein pythagoreisches Dreieck. Wenn wir umgekehrt von einem pythagoreischen Dreieck ausgehen, lassen sich aus den Seitenverhältnissen die beiden Parameter m und n bestimmen; und daraus ergibt sich ein passender Quadratraster. Zu Aufgabe 9: Die Winkeldrittelungs-Eigenschaft kann mit Winkelüberlegungen an den beiden in der Figur 38 erscheinenden gleichschenkligen Dreiecken SBA und CAB eingesehen werden [2]. Werden nicht nur drei, sondern allgemein n N Strecken aneinander gekoppelt, ergibt sich ein Gerät zur Winkel-n-Teilung. C A S α 2α 2α α 3α B Figur 38 Winkeldreiteilung Zu Aufgabe 10: Offene Aufgabe, der technischen Phantasie sind keine Grenzen gesetzt. Hans Walser: Gleit- und Gelenkfiguren 21 Zu Aufgabe 11: Das getönte Dreieck in der Figur 39 ist aus Symmetriegründen rechtwinklig. Die Hypotenuse hat die Länge 3 , die kurze Kathete die Länge 1. Daraus ergibt sich für die Diagonale des fraglichen Rhombus die Länge 2 ; der Rhombus ist also ein Quadrat. Figur 39 Beweisfigur Zu Aufgabe 12: Das getönte Dreieck in der Figur 40 liefert den Schlüssel. In diesem Dreieck messen die längste Seite 3 und die kürzeste Seite 1. Die kürzeste Dreiecksseite liegt auf der Symmetrieachse der Gesamtfigur, die mittlere Dreiecksseite liegt rechtwinklig dazu. Das Dreieck ist also rechtwinklig; die mittlere Dreiecksseite hat nach Pythagoras die Länge 2 . Das unter diesem rechtwinkligen Dreieck liegende gleichschenklige Dreieck hat die Schenkellänge 1 und die Basislänge 2 ; es also ebenfalls rechtwinklig. Daher ist der Rhombus rechtwinklig, also ein Quadrat. Figur 40 Beweisfigur Zu Aufgabe 13: Beweis analog Aufgabe 11: Wir untersuchen das Dreieck, dessen eine Seite die in Bezug auf die Figur 11 vertikale Rhombendiagonale ist und eine weitere Seite eine in Bezug auf die Figur 11 horizontale Einheitsstrecke. Dieses Dreieck ist wegen der Symmetrie der Figur 11 rechtwinklig, die Hypotenuse hat die Länge 3 und die kurze Kathete die Länge 1. Daher hat die lange Kathete, also die Diagonale des Rhombus, die Länge 2 ; der Rhombus ist also ein Quadrat. Zu Aufgabe 14: Ich bin dankbar um Mitteilung einer allfälligen Lösung mit noch weniger Strecken. Hans Walser: Gleit- und Gelenkfiguren 22 Zu Aufgabe 15: In der Standardlösung (Figur 41 links) kann noch eine Speiche weggelassen werden (Figur 41 rechts). Figur 41 Regelmäßiges Sechseck Zu Aufgabe 16: Die beiden getönten Dreiecke in der Figur 42 sind gleichschenklig. α δ β α γ δ Figur 42 Invarianz des Winkels an der Spitze Eine Veränderung des Basiswinkels gleichschenkligen Dreieck links führt zu = 2 , weiter zu = = 2 und schließlich zu = 12 = 12 = . Die beiden Schenkel des Winkels an der Spitze drehen also gleichmäßig. Daher bleibt dieser Winkel invariant. Zu Aufgabe 17: Es ist unwesentlich, in welchem Verhältnis die Scherengelenke die Strecken teilen, es darf lediglich nicht in der Mitte sein, weil sich sonst keine Krümmung ergäbe. Die Figur 43 zeigt drei verschiedene Varianten. Je extremer das Teilverhältnis, desto schärfer die Spitzen der Sternfigur. Figur 43 Drei Varianten Hans Walser: Gleit- und Gelenkfiguren 23 Zu Aufgabe 18: Wir wählen A a , drehen b um A um 60° und schneiden die gedrehte Gerade mit c. Das gibt die Ecke C. Die Größe des Dreiecks kann nun noch durch zentrische Streckung von S aus variiert werden (Figur 44). b′ c C b S B 60° A a Figur 44 Einpassen eines Dreieckes Zu Aufgabe 19: Mir ist der Beweis nur im Sonderfall ab gelungen. In diesem Sonderfall bewegt sich der Mittelpunkt der Strecke AB auf einem Kreis. Die Bewegung des Punktes C ist relativ zu diesem Mittelpunkt ebenfalls eine Kreisbewegung, zwar im anderen Drehsinn, aber mit derselben Frequenz. Die Überlagerung solcher Kreisbewegungen ergibt eine Ellipse als Bahnkurve. (Es ist zu beachten, dass man aus diesem Sonderfall nicht mit dem Hinweis auf Affinität auf den allgemeinen Fall schließen kann, da das in der Konstruktion verwendete gleichseitige Dreieck nicht affin invariant ist.) Zu Aufgabe 20: Wir passen eine symmetrische Schere (die “Diagonalenschere”) so ein, dass drei der vier Endpunkte auf den passenden Schienen liegen (Figur 45). Durch Bewegen bringen wir den vierten Punkt in seine richtige Lage. Bei dieser Bewegung ändert das Rechteck seine Form. D d b C A M a c B Figur 45 Diagonalenschere Hans Walser: Gleit- und Gelenkfiguren 24 Zu Aufgabe 21: Die beiden rechtwinkligen Dreiecke PNM und SQM sind ähnlich (Figur 46). Daher ist MP = r . Daraus folgt r MQ die Behauptung. N R P k r Q M r S Figur 46 Ähnliche Dreiecke Zu Aufgabe 22: Im Dreieck MAP (Figur 47) ergibt sich mit dem Cosinus-Satz MP = cos( µ) + cos 2 ( µ) + 3 und im Dreieck MDQ entsprechend MQ = cos ( µ) + cos2 (µ ) + 3 . Daher ist MP MQ = 3 . B 2 D 2 1 2 Q µ M P 2 1 2 A Figur 47 Beweisfigur C Hans Walser: Gleit- und Gelenkfiguren 25 Zu Aufgabe 23: Im Dreieck MPB (Figur 48) liefert der Cosinus-Satz MP = b cos (µ ) + b2 cos2 (µ ) + a 2 b2 und im Dreieck MQB entsprechend MQ = b cos (µ ) + b2 cos2 (µ ) + a 2 b 2 . Daher ist MP MQ = a 2 b 2 . Wir haben also eine Kreisspiegelung an einem Kreis mit dem Zentrum M und dem Radius r = a 2 b2 . B b b a µ π−µ Q M P b b a A Figur 48 Beweisfigur Zu Aufgabe 24: Mit dem Gelenkmodell der Figur 49 kann ohne Lineal eine Gerade gezeichnet werden. Fix Fix Q P Figur 49 Idee von PEAUCELLIER Literatur [1] Dickson, L. E.: History of the Theory of Numbers, II. Diophantine Analysis. Washington: Carnegie Institution 1920. [2] Schönwald, H. G.: Ein archimedisches Winkeldrittelungsgerät. MNU - Der mathematische und naturwissenschaftliche Unterricht, 52/5, 1999, S. 274-275. [3] Wells, David: The Penguin Dictionary of Curious and Interesting Geometry. London: Penguin Books 1991. ISBN 0-14-011813-6 Anschrift des Autors: Dr. Hans Walser, Gerlikonerstrasse 29, CH - 8500 Frauenfeld [email protected]